welcome to our presentation aibo field localisation (baslamet) woiyl hammoumi vladimir nedovic bayu...
TRANSCRIPT

Welcome to our presentation
Aibo field localisation(http://www.science.uva.nl/~baslamet)
Woiyl HammoumiVladimir NedovicBayu SlametRoberto Valenti
February 4th, 2005

RoboCupRoboCup4-Legged LeagueCode Overview
New Rules 2005Playing Field 2004Playing Field 2005
ProblemsProblem AnalysisMonte Carlo
LocalizationBehaviour Control
ObservationsAnalysis
RecommendationsFuture
• International robot soccer World Championship
• July 2005 - Osaka
• ‘By the year 2050, develop a team of fully autonomous humanoid robots that can win against the human world soccer champion team’
• Teams have to publish their code after each RoboCup

4-Legged LeagueRoboCup4-Legged
LeagueCode Overview
New Rules 2005Playing Field 2004Playing Field 2005
ProblemsProblem AnalysisMonte Carlo
LocalizationBehaviour Control
ObservationsAnalysis
RecommendationsFuture
• Played with Aibo’s• 4 vs 4:
– Goalie– Defensive supporter– Offensive supporter– Striker
• The Dutch Aibo Team – Joint effort of various Dutch
universities– First participated in 2004– Aims for victory in 2005

Code OverviewRoboCup4-Legged LeagueCode Overview
New Rules 2005Playing Field 2004Playing Field 2005
ProblemsProblem AnalysisMonte Carlo
LocalizationBehaviour Control
ObservationsAnalysis
RecommendationsFuture

New Rules 2005RoboCup4-Legged LeagueCode Overview
New Rules 2005Playing Field 2004Playing Field 2005
ProblemsProblem AnalysisMonte Carlo
LocalizationBehaviour Control
ObservationsAnalysis
RecommendationsFuture
• Increasingly natural soccer playing• Changes for 2005:
– Bigger playing field – White borders are removed– Colored marker poles change location– Introduction of out-ball concept– Robot’s should stay inside the field
• Our project:– Determine problems that will arise – Analyze and document possible
solutions– Implement solutions for DT2005 code

Playing Field 2004RoboCup4-Legged LeagueCode Overview
New Rules 2005Playing Field
2004Playing Field 2005
ProblemsProblem AnalysisMonte Carlo
LocalizationBehaviour Control
ObservationsAnalysis
RecommendationsFuture

Playing Field 2005RoboCup4-Legged LeagueCode Overview
New Rules 2005Playing Field 2004Playing Field
2005
ProblemsProblem AnalysisMonte Carlo
LocalizationBehaviour Control
ObservationsAnalysis
RecommendationsFuture

Problems RoboCup4-Legged LeagueCode Overview
New Rules 2005Playing Field 2004Playing Field 2005
ProblemsProblem AnalysisMonte Carlo
LocalizationBehaviour Control
ObservationsAnalysis
RecommendationsFuture
• Localisation becomes inaccurate– Old field size is hard-programmed in– Marker poles are moved– Extensive usage of white border
• Behavior is based on closed-border field– Bounce effect of borders is used– No awareness of out-ball situations– Robots don’t know they should stay
in the field

Problem AnalysisRoboCup4-Legged LeagueCode Overview
New Rules 2005Playing Field 2004Playing Field 2005
ProblemsProblem
AnalysisMonte Carlo
LocalizationBehaviour Control
ObservationsAnalysis
RecommendationsFuture
• What we knew:– Field dimensions are hard-coded in
C++– Field positions and distances are
hard-coded in the behaviour specifications
• What we guessed:– Field dimensions may be hard-
coded or implicitly assumed elsewhere
Monte Carlo LocalizationRoboCup4-Legged LeagueCode Overview
New Rules 2005Playing Field 2004Playing Field 2005
ProblemsProblem AnalysisMonte Carlo
LocalizationBehaviour Control
ObservationsAnalysis
RecommendationsFuture
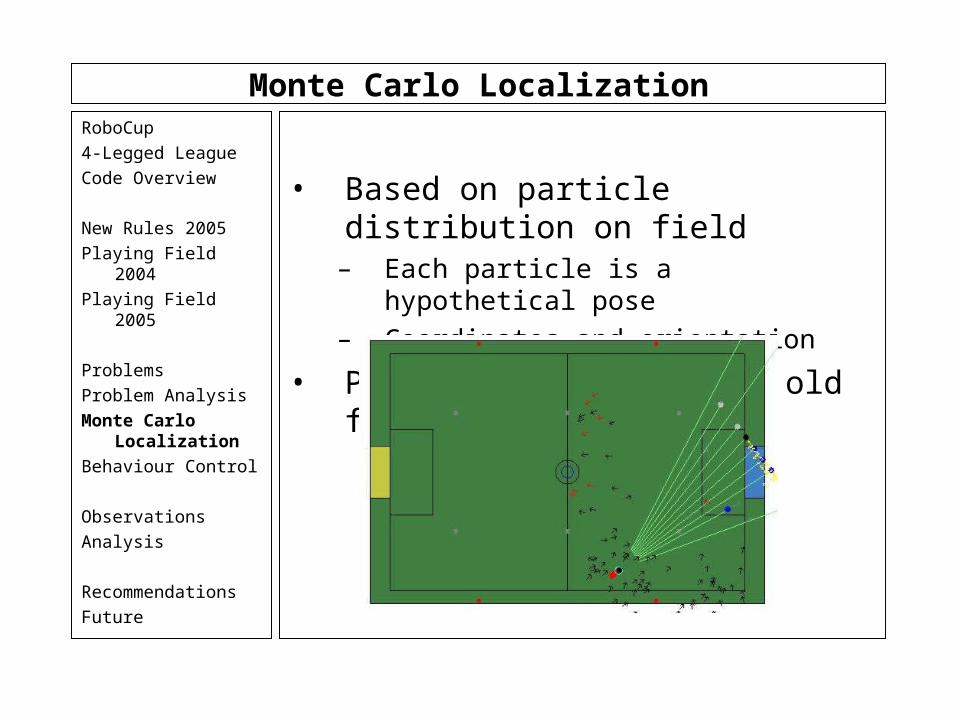
• Based on particle distribution on field– Each particle is a hypothetical pose– Coordinates and orientation
• Particles generated on old field size

Behaviour Control (1)RoboCup4-Legged LeagueCode Overview
New Rules 2005Playing Field 2004Playing Field 2005
ProblemsProblem AnalysisMonte Carlo
LocalizationBehaviour
Control
ObservationsAnalysis
RecommendationsFuture
• Defined using finite state machines– Internal coordination with decision
trees– Based on hard-coded field positions

Behaviour Control (2)RoboCup4-Legged LeagueCode Overview
New Rules 2005Playing Field 2004Playing Field 2005
ProblemsProblem AnalysisMonte Carlo
LocalizationBehaviour
Control
ObservationsAnalysis
RecommendationsFuture
• If robot.pose.x > 300 then ….– Ambiguous interpretation– Common sense / intuition

Observations GT2004RoboCup4-Legged LeagueCode Overview
New Rules 2005Playing Field 2004Playing Field 2005
ProblemsProblem AnalysisMonte Carlo
LocalizationBehaviour Control
ObservationsAnalysis
RecommendationsFuture
• GT2004 Aibo does fine– Especially goalie and striker – Robust behaviour– But: with old flag positions

Observations DT2005RoboCup4-Legged LeagueCode Overview
New Rules 2005Playing Field 2004Playing Field 2005
ProblemsProblem AnalysisMonte Carlo
LocalizationBehaviour Control
ObservationsAnalysis
RecommendationsFuture
• DT2005 Aibo has some trouble– Does fine until kick-off – After kick-off positioning is incorrect

Analysis (1)RoboCup4-Legged LeagueCode Overview
New Rules 2005Playing Field 2004Playing Field 2005
ProblemsProblem AnalysisMonte Carlo
LocalizationBehaviour Control
ObservationsAnalysis
RecommendationsFuture
• Initial positioning is purely based on perception
• With the GT2004 Aibo, all modules are based on the same (old) field dimensions
• The DT2005 Aibo still recieves wrong input from perception modules
• There remain unsolved hard-coded dependencies in the DT2005 Aibo

Analysis (2)RoboCup4-Legged LeagueCode Overview
New Rules 2005Playing Field 2004Playing Field 2005
ProblemsProblem AnalysisMonte Carlo
LocalizationBehaviour Control
ObservationsAnalysis
RecommendationsFuture
• Changes in C++ have been checked
• Changes in behaviour as well• We can observe the correctness
in RobotControl
• The problem is elsewhere– Hard-coded dependencies in
Perception modules– Then we ran out of time …

RecommendationsRoboCup4-Legged LeagueCode Overview
New Rules 2005Playing Field 2004Playing Field 2005
ProblemsProblem AnalysisMonte Carlo
LocalizationBehaviour Control
ObservationsAnalysis
Recommendations
Future
• Check Perception modules and their configuration files
• Merge this with our changes in the C++ and behaviour specifications
• Improve behaviour to take out-ball situations into account as well
• And you just might win …!

Future RoboCup4-Legged LeagueCode Overview
New Rules 2005Playing Field 2004Playing Field 2005
ProblemsProblem AnalysisMonte Carlo
LocalizationBehaviour Control
ObservationsAnalysis
RecommendationsFuture
• Field specifications are likely to change more often
• Develop a single source for field dimensions – Extend FieldDimensions class to
make it provide all necessary points and distances
– Use this in all Perception modules – Use this in Behaviour module

Questions
Do you have any questions?