vybrane casti mat analyzy
TRANSCRIPT

Mária MIŠÚTOVÁ – Iveta MARKECHOVÁ Lujza ČIPKOVÁ HAMPLOVÁ – Lilla KREMŽÁROVÁ
Matematika II. Vybrané časti matematickej analýzy
a ich aplikácie
2012

2
© Doc. RNDr. Mária Mišútová, PhD., RNDr. Iveta Markechová, CSc., PaedDr. Lujza Čipková Hamplová, PhD., PaedDr. Lilla Kremžárová, PhD.
Recenzenti: doc. RNDr. Pavel Híc, CSc.
doc. Mgr. Róbert Vrábeľ, PhD. Jazyková korektúra: Mgr. Valéria Krahulcová
Schválilo Vedenie Materiálovotechnologickej fakulty STU ako vysokoškolské skriptá dňa 24. januára 2012 pre všetky študijné programy Materiálovo-technologickej fakulty STU v Trnave.
ISBN 978-80-8096-169-5 EAN 9788080961695

3
ÚVOD Nie to, čo máš, ale to, čo vieš, je tvojím
bohatstvom. T. Carlyle
Študijný materiál „Matematika II. Vybrané časti matematickej analýzy“ je pokračovaním už vydaného študijného materiálu „Matematika I . Vybrané časti matematickej analýzy.“ Opäť je určený všetkým študentom, ktorí majú záujem oboznámiť sa s aplikáciami matematickej analýzy, naučiť sa riešiť úlohy, ako aj využívať matematický softvér pri riešení úloh, obsahom ktorých sú teraz témy Matematiky II. Cieľom publikácie je ukázať na vybraných úlohách aplikáciu vedomostí z matematickej analýzy, ako aj na vybraných príkladoch ukázať, kde a akým spôsobom možno voľne šíriteľný matematický softvér efektívne použiť.
Voľne šíriteľné programy sme vybrali zámerne, aby si študenti osvojili nástroj, ktorý budú môcť využívať pri riešení matematických problémov i po absolvovaní základného kurzu matematiky v ďalšom štúdiu a aj v praxi.
Program WinPlot umožňuje zobrazovať grafy funkcií, kriviek a plôch. Program Maxima možno využívať pri riešení úloh z algebry, matematickej analýzy i ďalších oblastí, kde je vhodné realizovať symbolické operácie, vizualizáciu, a tiež numerické výpočty.
Študijný materiál je rozdelený do 8 kapitol, obsahom ktorých sú:
• určitý integrál a jeho geometrické aplikácie, • nevlastný integrál, • funkcia 2 a 3 premenných, • parciálne derivácie, dotyková rovina, • extrémy funkcie 2 premenných, • vybrané časti vektorovej analýzy,
Súčasťou publikácie sú najčastejšie používané syntaktické pravidlá zadávania matematických výrazov v programoch Maxima a WinPlot.
Každá kapitola obsahuje riešené úlohy, aplikácie matematických vedomostí v úlohách z rôznych oblastí, úlohy určené na samostatné riešenie a výsledky týchto úloh. Aplikácie vznikli aj na základe konzultovania autoriek s vyučujúcimi fyziky a odborných predmetov v rámci fakulty, univerzity a SAV.
Záverom chceme pripomenúť, že hoci každá novšia verzia využitých programov má
svoje špecifiká, podstata programov ostáva zachovaná. Taktiež si pokladáme za potrebné opätovne zdôrazniť, že predpokladom efektívneho využívania matematického softvéru sú primerané vedomosti z matematiky a predkladaná publikácia dopĺňa štúdium predmetu matematika II prostredníctvom prednášok a cvičení. Ďakujeme recenzentom doc. RNDr. Pavlovi Hícovi, CSc. a doc. Mgr. Róbertovi Vrábeľovi, PhD. za pozorné prečítanie textu a cenné pripomienky. Ďakujeme tiež grantovej agentúre KEGA za podporu projektu č. 021 STU - 4/2011 Model vyučovania matematiky s využitím nových technológií, v rámci riešenia ktorého bol študijný materiál vypracovaný. Autorky

4
1 URČITÝ INTEGRÁL
Vzorce používané pri výpočtoch určitých integrálov: (V uvedených vzťahoch sa predpokladá, že funkcie f, resp. g sú integrovateľné na ⟨a, b⟩.)
[ ] )()()()( aFbFxFdxxfb
a
b
a
−==∫ ; (Leibnizov-Newtonow vzorec).
∫∫ −=a
b
b
a
dxxfdxxf )()( ; ∫ =a
a
dxxf 0)( .
∫ ∫ ∫+=+b
a
b
a
b
a
dxxgdxxfdxxgxf )()())()(( ; ∫∫ =b
a
b
a
dxxfcdxxfc )()(. , c∈R.
Ak ,bca << potom ∫ ∫∫ +=c
a
b
c
b
a
dxxfdxxfdxxf )()()( .
Nech f je integrovateľná na ⟨− a, a⟩, potom platí:
∫∫−
=aa
a
dxxfdxxf0
)(2)( , ak f je párna funkcia a 0)(∫−
=a
a
dxxf , ak f je nepárna funkcia.
Substitučná metóda Ak sa funkcia f (integrovateľná na ⟨a, b⟩) dá vyjadriť v tvare )())(( xxf ϕϕ ′ , kde ϕ a ϕ′ sú spojité
na ⟨a, b⟩, a zároveň je f spojitá v každom bode )(xt ϕ= , kde ∈x ⟨a, b⟩, tak platí:
∫∫ =
==
=′=
=′β
α
ϕβϕα
ϕϕ
ϕϕ dttf
b
a
dtdxx
tx
dxxxfb
a
)(
)(
)(
)(
)(
)())(( .
Metóda per partes Nech funkcie u a v majú na intervale ⟨a, b⟩ spojité derivácie vu ′′, . Potom platí:
[ ]∫ ∫ ′−=′b
a
b
a
b
a dxxvxuxvxudxxvxu )()()()()()( .
Riešené úlohy
Príklad 1. Vypočítajte určitý integrál ∫−
+
−1
2
2
4
25 dx
xx .
Riešenie: Skôr ako začneme výpočet, je potrebné overiť, či interval ⟨−2, 1⟩ neobsahuje body,
v ktorých nie je daná funkcia definovaná. Definičným oborom funkcie
+
−=4
25)( 2
xxxf
je 4)( −−= RfD . To znamená, že jediný bod nespojitosti funkcie f nepatrí do intervalu
⟨−2, 1⟩. Podľa vyššie uvedených vzorcov teda platí:
[ ]
( ) ⋅+=+−=+−−+−
−−=
=+−
=
+−=
+
− −− − −−∫ ∫∫
5
2ln2152ln25ln2
3
9542ln41ln2
3
)2(
3
15
4ln23
54
125
4
25
33
12
1
2
1
2
1
2
32
1
2
2 xx
dxx
dxxdxx
x
Daný integrál môžeme vypočítať aj bez jeho rozdelenia a vyňatia konštánt.

5
⋅+=+=++−=
=
+−−−−
+−=
+−=
+
−−−
∫
5
2ln215
5
2ln2
3
452ln2
3
855ln2
3
15
42ln23
)2(541ln2
3
154ln2
35
4
25
331
2
31
2
2 xx
dxx
x
Náš výsledok porovnáme s výsledkom vypočítaným pomocou programu Maxima. V menu Calculus vyberieme položku Integrate a následne do dialógového okna zadáme integrovanú funkciu, premennú, zvolíme „určité“ integrovanie (vyberieme ponuku „Definite integration“) a následne zapíšeme hranice integrálu. Potvrdíme naše zadanie a na pracovnej ploche sa zobrazia vstupné údaje a výsledok výpočtu (obr. 1.1).
Obr. 1.1 Výpočet určitého integrálu v programe Maxima
Príklad 2: Vypočítajte určitý integrál ∫2
0
23 dxxex .
Riešenie: Funkcia 2
3)( xxexf = je spojitá na R, a teda je integrovateľná aj na intervale ⟨0, 2⟩. Zadaný integrál vypočítame substitučnou metódou.

6
[ ]
( ) ⋅−=−=
====
==⇒===⇒=
=⇒==
== ∫∫∫∫
2
3
2
3
2
3
2
3
2
3
2
13
422
0002
12
33
404
40
4
0
4
02
2
2
2
0
2
0
22
eee
edtedte
b
a
dtxdxdtxdx
tx
dxexdxxe tttxx
βα
Pri používaní substitučnej metódy pre určitý integrál je dôležité nezabudnúť vypočítať hranice novovzniknutého integrálu vzhľadom na použitú substitúciu.
Pomocou programu Maxima ešte vypočítame integrály ∫2
0
23 dxxex a ∫
4
02
3dtet a porovnáme
s naším výpočtom (obr. 1.2a, 1.2b).
Obr. 1.2a Výpočet určitého integrálu bez substitúcie
Obr. 1.2b Výpočet určitého integrálu po použití substitúcie
Príklad 3: Vypočítajte určitý integrál ∫3
1
3 dxxe x .
Riešenie: Tak ako v predchádzajúcich príkladoch skontrolujeme, či je daná funkcia xxexf 3)( = integrovateľná na intervale ⟨1, 3⟩. Keďže definičný obor funkcie je R, funkcia f
je spojitá na celej množine reálnych čísel, a teda aj na intervale ⟨1, 3⟩ a môžeme ju integrovať. Pri výpočte použijeme metódu per partes.

7
[ ] [ ] ( ) ( )⋅−=+−−=
=−−−=−=
−
=
=−
=−
====′
=′== ∫∫∫ ∫
393939
1.33.31.33.331
331
33
1
33
1
3
3
1
33
1
33
1
33
1
33
1
33
33
9
2
9
8
9
1
9
1
3
1
9
113
3
1
9
1
3
1
3
1
3
1
3
1
3
1
3
1
3
1
3
1
3
11
eeeeee
eeeeexeeex
dxeexdxeexedxevu
evxudxxe
xxxx
xxxxxx
xx
Aplikácie 1. V elektrotechnike (1) sa pri striedavých napätiach a prúdoch zavádzajú charakteristické veličiny, ktoré sa s časom nemenia a ich veľkosť sa dá určiť meraním meracími prístrojmi. Týmito mierami striedavých veličín sú stredná a efektívna hodnota. Pri striedavom harmonickom priebehu napätia je veľkosť strednej, tzv. aritmetickej hodnoty daná vzťahom:
dttUT
UT
ma ωcos1
0∫= . (1) Výpočet určitého integrálu je nasledovný:
[ ] TU
TUtUdttUdttU mm
T
m
T
m
T
m ωω
ωω
ωω
ωω
ωω sin0.sin1
sin1
sin1
coscos000
=
−=== ∫∫ .
2. Pri harmonickom prúde platí pre okamžitú hodnotu výkonu 2.iRp = . Keďže
tItIi m ωω cos..2cos. == , stredná hodnota Jouleových strát je:
∫∫ ==TT
dttT
RIdtiR
TP
0
2
0
22 cos
2.
1 ω . (1) Pri výpočte určitého integrálu môžeme využiť
matematický vzorec: 2
cos1
2cos
xx += . Potom
[ ] =+=
+=+= ∫∫∫ ttdttdtt
tTTTT
ωω
ωωω 2sin4
1
2
12cos
2
1
2
1
2
2cos1cos
0000
2
TTTT ωω
ωω
ωω
2sin4
1
2
10.2sin
4
10.
2
12sin
4
1
2
1 +=
+−+= . Ak využijeme známy vzťah
T
πω 2= , dostaneme výraz: ππ 4sin2
.4
1
2
1
T
T + . Keďže ,04sin =π určitý integrál
TtT
2
1cos
0
2 =∫ ω . Takže stredná hodnota Jouleových strát 22
2
1.
2RIT
T
RIP == .
3. V oblasti inžinierstva pracovného prostredia (2) pri hodnotení vplyvu hluku na zdravie človeka je rozhodujúca aj charakteristika - ekvivalentná hladina A zvuku. T.j. časový priemer hladiny A zvuku (LAeq,T) v dB, veličina definovaná vzťahom:
( )dt
p
tp
TL
t
t
ATAeq
2
0,
2
1
1log10 ∫
= ,
kde pA(t) – je časová funkcia akustického tlaku váženého frekvenčnou váhovou funkciou A, T – je trvanie integrácie T = t2 – t1 v s,

8
po – je referenčný akustický tlak; po = 2.10-5 Pa.
4. V oblasti inžinierstva pracovného prostredia (2) sa používa veličina ekvivalentné zrýchlenie vibrácií aeq,T – je to efektívna hodnota zrýchlenia vibrácií určená vzťahom:
( )[ ]2
1
2,
02
1
.1
= ∫
t
t
Teq dttaT
a ,
kde a(t) – časová funkcia okamžitého zrýchlenia vibrácií, T – je časový interval priemerovania zrýchlenia vibrácií, T = t2 – t1. Jednotkou je (m.s-2). 5. Vo fyzike (3) sa výpočet dĺžky dráhy hmotného bodu, ktorú prejde za čas t, keď koná translačný pohyb s konštantnou rýchlosťou v smere osi z a zároveň rotačný pohyb okolo z-ovej osi s konštantnou uhlovou rýchlosťou fπω 2= (t.j. pri pohybe po cylindrickej
skrutkovici), realizuje pomocou určitého integrálu ∫ ∫ +=s t
dtvRds0 0
222ω .
Integračné premenné sú dráha s a čas t. Ostatné veličiny sú konštanty.
[ ] [ ]tvRsts
0
222
0+= ω → .ts = 222 vR +ω .
6. Určitý integrál sa používa aj pri výpočte uhla pootočenia rotora za určitú dobu (3). Podľa
definície uhlovej rýchlosti platí dt
dαω = . Potom uhol pootočenia ∫=1
0
t
dtωα .
Ak teda napríklad chceme zistiť, o aký uhol sa pootočí rotor za 6 sekúnd pri uhlovej rýchlosti
2tπω = , vypočítame: 3
6.
3
0.
3
6.
3
3 3336
0
6
0
6
0
2 πππππωα =−==== ∫
∫
tdttdt .
7. V dynamike sa využíva určitý integrál napr. pri počítaní rýchlosti hmotného bodu, ktorú má v momente, keď opustí hladkú valcovú plochu s polomerom R, ak jeho začiatočná rýchlosť
bola 0v . Rýchlosť vypočítame zo zostavenej pohybovej rovnice: ϕsin.. gds
dvv = integráciou
pri začiatočných podmienkach 0,,0 0 === ϕvvt , pričom ϕdRds .= a odpor prostredia
zanedbávame (4).
∫∫ =ϕ
ϕϕ0
sin..
0
dRgdvvv
v
[ ]ϕϕ 0
2
cos.2
0
−=
Rg
vv
v
( )( )0coscos.2
1
2
1 20
2 −−−=− ϕRgvv , keďže 10cos =
( )1cos.2
1
2
1 20
2 +−=− ϕRgvv
( )ϕcos1.2
1
2
1 20
2 −+= Rgvv /.2

9
( )ϕcos1.220
2 −+= Rgvv
( )ϕcos1.2 −= Rgv .
Úlohy Vypočítajte určitý integrál, vhodne využite program Maxima.
1. a) ( ) dxxx∫ +−2
1
2 23 , b) ∫
−+1
6
3cos
πdxe
xx x , c) dx
x
x∫
−−2
0 3
32, d) ∫
−
− −
3
42 4
1dx
x.
2. a) ∫ ++
2
12 23
dxxx
x, b) ∫ −
3
0
31 dxx , c) ∫−+
2
1223 xx
dx.
Pomocou substitučnej metódy vypočítajte určitý integrál.
3. a) ∫+e
dxx
x
1
ln1, b) dxx∫
3
0
tg
π
, c) ∫ −
7
32 4
dxx
x, d) ∫
+
1
021
dxx
x.
4. a) ∫ +−5ln
0 3
1dx
e
eex
xx
, b) ∫ +
4
0 1dx
x
x, c) ∫ −
2
0
24 dxx .
Pomocou metódy per partes vypočítajte určitý integrál.
5. a) ∫2
0
sin
π
dxxx , b) ∫ −3
4
2sin
π
πdxxx , c) ∫ −
2
0
dxxe x , d) ∫2
0
2 cos
π
dxxe x .
Riešenia
1. a) 6
1− , b) 2
1
6ln31sin 6 −+−+ ππ
ee , c) 3ln34− , d) 3
5ln
4
1. 2. a)
27
32ln , b)
6
65, c)
6
π.
3. a) 2
3, b) 2ln , c) 3ln , d) 12 − . 4. a) π−4 , b) 2arctg24− (zvoľte substitúciu 2tx = ),
c) 12
+π (zvoľte substitúciu tx sin2= ). 5. a) 1, b)
2
3ln
2
1
433++− ππ
, c) 13 2 +− −e ,
d) ( )25
1 −πe .
Zoznam bibliografických odkazov 1. KOSORIN, Dušan. Elektrotechnika. Bratislava: Vydavateľstvo STU, 1999. [cit. 2012-10-
06]. Dostupné na internete: http://is.stuba.sk 2. BALOG, K., TUREKOVÁ, I., TURŇOVÁ, Z. Inžinierstvo pracovného prostredia.
Bratislava: Vydavateľstvo STU, 2006. ISBN 80-227-2574-9. [cit. 2012-10-06]. Dostupné na internete: http://is.stuba.sk

10
3. LABAŠ, V., MINÁRIK, S. Fyzika 1. Bratislava: Vydavateľstvo STU, 2002. ISBN 80-227-1671-5. [cit. 2012-10-06]. Dostupné na internete: http://is.stuba.sk
4. PEKÁREK, F., SABO, M., NAĎ, M. Dynamika. Bratislava: Vydavateľstvo STU, 1990. ISBN 80-227-0304-4. [cit. 2012-10-06]. Dostupné na internete: http://is.stuba.sk
5. ELIAŠ, J., HORVÁTH, J. KAJAN, J. Zbierka úloh z vyššej matematiky 2. Bratislava: STU, 1976.

11
2 GEOMETRICKÉ APLIKÁCIE UR ČITÉHO INTEGRÁLU
( ) ( )[ ] dxxgxfPb
a∫ −= plošný obsah rovinných oblastí
( ) ( )( ) dxxgxfVb
a
x ∫ −= 22π objem rotačných telies, ktoré vzniknú rotáciou rovinnej oblasti, ak rotačná os je xo
( ) ( )( )[ ] dxxgxfxVb
a
y ∫ −= π2 objem rotačných telies, ktoré vzniknú rotáciou rovinnej oblasti, ak rotačná os je yo
( )[ ] dxxfdb
a
k ∫ ′+= 21 dĺžka krivky, ktorá je grafom funkcie y = f(x) na intervale
ba,
Riešené úlohy Príklad 1. Využitím programu Maxima vypočítajte plošný obsah časti roviny ohraničenej krivkami 2ln,, === − xeyey xx . Pomocou programu WinPlot zobrazte danú časť roviny.
Riešenie: Najprv zobrazíme v programe WinPlot časť roviny ohraničenej krivkami ,xey =
2ln, == − xey x . Na zobrazenie grafu funkcií xey = a xey −= použijeme v menu Rovnosť položku 1. explicitne (obr. 2.1a,b).
Obr. 2.1a Výber spôsobu zadania zobrazovanej čiary
Obr. 2.1b Zadávanie funkcií xey = a xey −=

12
Na zobrazenie grafu priamky 2ln=x použijeme v menu Rovnosť položku Priamka (obr. 2.2).
Obr. 2.2 Zadávanie priamky
Obr. 2.3 Zobrazenie časti roviny v programe WinPlot Z obr. 2.3 je zrejmé, že ( ) ( ) 2ln,0,, ==== − baexgexf xx . V programe Maxima zvolíme na hornej lište v položke Calculus príkaz Integrate. Do dialógového okna zapíšeme potrebné informácie (obr. 2.4).1
Obr. 2.4 Zadávanie určitého integrálu
1 Prirodzený logaritmus sa v programe Maxima označuje log, iné logaritmy nie sú k dispozícii.

13
Na pracovnej ploche sa vypíše:
Výsledok získaný v programe Maxima porovnáme s výsledkom výpočtu bez použitia PC:
( ) [ ] [ ] =+−=+=−==−
=−=−=−= −
−−− ∫∫∫∫
2ln
002ln
2ln
0
2ln0
2ln
0
2ln
0
2ln
0
ttxxxxx eeedtee
dtdx
dtdx
tx
dxedxedxeeP
ββαα
=−⇒=−=⇒=−
2ln
0
b
a
⋅==−+=−+−= −− −
2
121112 12ln02ln 1
eee
Príklad 2. Využitím programu Maxima vypočítajte objem telesa, ktoré vznikne rotáciou elementárnej oblasti určenej krivkami 22 ,1 xyxy =−= okolo osi xo . Pomocou programu
WinPlot zobrazte danú elementárnu oblasť.
Riešenie: Najprv zobrazíme v programe WinPlot elementárnu oblasť určenú krivkami 22 ,1 xyxy =−= použitím položky explicitne (obr. 2.5).
Obr. 2.5 Zadávanie funkcií
Obr. 2.6 Zobrazenie elementárnej oblasti v programe WinPlot
14
Z obr. 2.6 je zrejmé, že ( ) ( ) 22 ,1 xxgxxf =−= , pričom a, b vypočítame ako x-ové súradnice
priesečníkov obidvoch grafov. Riešením rovnice 221 xx =− dostávame reálne korene
2
1,
2
121 −== xx .
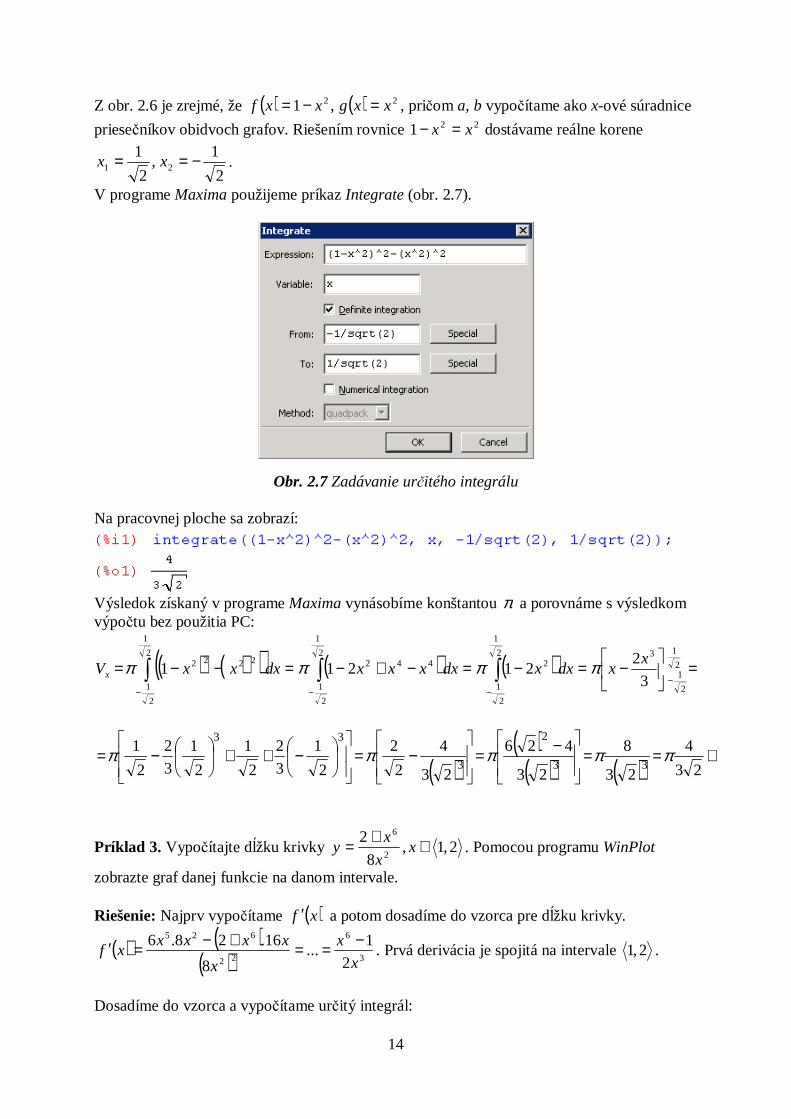
V programe Maxima použijeme príkaz Integrate (obr. 2.7).
Obr. 2.7 Zadávanie určitého integrálu Na pracovnej ploche sa zobrazí:
Výsledok získaný v programe Maxima vynásobíme konštantou π a porovnáme s výsledkom výpočtu bez použitia PC:
( ) ( )( ) ( ) ( ) =
−=−=−+−=−−=
−−−−
∫∫∫ 2
1
2
1
32
1
2
1
22
1
2
1
4422
1
2
1
2222
3
221211
xxdxxdxxxxdxxxVx ππππ
( )( )
( ) ( ) ⋅==
−=
−=
−++
−=23
4
23
8
23
426
23
4
2
2
2
1
3
2
2
1
2
1
3
2
2
133
2
3
33
πππππ
Príklad 3. Vypočítajte dĺžku krivky 2,1,8
22
6
∈+= xx
xy . Pomocou programu WinPlot
zobrazte graf danej funkcie na danom intervale. Riešenie: Najprv vypočítame ( )xf ′ a potom dosadíme do vzorca pre dĺžku krivky.
( ) ( )( ) 3
6
22
625
2
1...
8
16.28.6
x
x
x
xxxxxf
−==+−=′ . Prvá derivácia je spojitá na intervale 2,1 .
Dosadíme do vzorca a vypočítame určitý integrál:
15
( )( ) =+=++=+−+=
−+= ∫∫∫∫ dxx
xdx
x
xxdx
x
xxdx
x
xdk
2
123
262
16
6122
16
6122
1
2
3
6
2
1
4
12
4
121
2
11
∫∫∫ ∫∫∫ =+=+=
+=+= −−2
1
32
1
332
1
2
1
32
13
32
13
6
2
1
2
1
2
1
2
1
2
1
2
1
2
1dxxdxxdxxdxxdx
xxdx
x
x
⋅=
−+
=
−
16
33
22
1
42
12
1
22
1
4 xx
V programe WinPlot zobrazíme (červenou farbou) graf funkcie 2
6
8
2
x
xy
+= na intervale
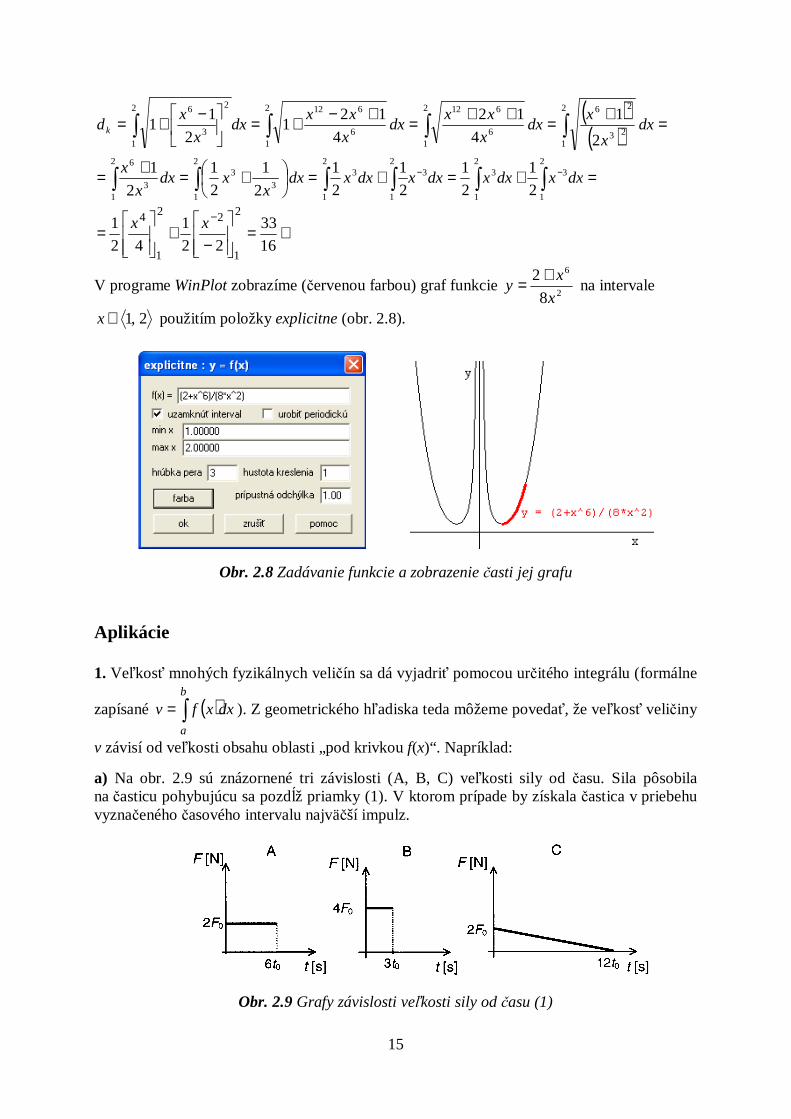
2,1∈x použitím položky explicitne (obr. 2.8).
Obr. 2.8 Zadávanie funkcie a zobrazenie časti jej grafu Aplikácie 1. Veľkosť mnohých fyzikálnych veličín sa dá vyjadriť pomocou určitého integrálu (formálne
zapísané ( )∫=b
a
dxxfv ). Z geometrického hľadiska teda môžeme povedať, že veľkosť veličiny
v závisí od veľkosti obsahu oblasti „pod krivkou f(x)“. Napríklad:
a) Na obr. 2.9 sú znázornené tri závislosti (A, B, C) veľkosti sily od času. Sila pôsobila na časticu pohybujúcu sa pozdĺž priamky (1). V ktorom prípade by získala častica v priebehu vyznačeného časového intervalu najväčší impulz.
Obr. 2.9 Grafy závislosti veľkosti sily od času (1)

16
Impulz je definovaný nasledovne: I = ∫2
1
t
t
Fdt. Keďže potrebujeme zistiť veľkosti impulzu,
prepíšeme predchádzajúci výraz do skalárneho tvaru: ∫=2
1
t
t
FdtI . Je zrejmé, že veľkosť
impulzu závisí len od hodnoty integrálu ∫2
1
t
t
Fdt a hodnota tohto integrálu je rovná ploche
pod krivkou F(t) na uvažovanom časovom intervale ., 21 tt
Veľkosti plôch vymedzené závislosťami F(t) na grafoch A), B), C) môžeme na daných časových úsekoch ľahko vypočítať v prvých dvoch prípadoch ako plochy obdĺžnikov, v treťom ako plochu pravouhlého trojuholníka.
.126.2 0000
6
0
0
tFtFSFdtI A
t
A ==== ∫
.123.4 0000
3
0
0
tFtFSFdtI B
t
B ==== ∫
.1212.2.2
1
2
10000
12
0
0
tFtFSFdtI C
t
C ==== ∫
Veľkosti impulzov sú vo všetkých troch prípadoch rovnaké: IA = IB = IC = 12F0t0.
b) Na obr. 2.10 sú znázornené štyri závislosti sily F od x-ovej súradnice. Sila F pôsobila v smere x-ovej osi. Usporiadajte závislosti I., II., III., IV. podľa veľkosti práce vykonanej na intervale od x = 0 do x = x1. Prvá v poradí nech je závislosť, kde je vykonaná najväčšia kladná práca, posledná v poradí nech je závislosť, kde je vykonaná najväčšia záporná práca. Vo všetkých grafoch je použitá rovnaká mierka (1).
Obr. 2.10 Grafy závislosti sily F od x-ovej súradnice (1)
Práca vykonaná silou je definovaná nasledovne: ∫=2
1
.r
r
drFA . Podľa zadania sila F pôsobí
v smere x-ovej osi, a preto môžeme prepísať predchádzajúci výraz do tvaru: ∫=1
0
.x
dxFA .
Je zrejmé, že veľkosť práce závisí od hodnoty integrálu ∫1
0
.x
dxF a hodnota tohto integrálu
je rovná ploche pod krivkou F(x) na uvažovanom intervale 1,0 x . Veľkosti plôch vymedzené
závislosťami F(x) na grafoch I., II., III., IV. dokážeme na danom časovom úseku ľahko porovnať. Treba mať pritom na pamäti, že ak je sila záporná, potom i vykonaná práca

17
je záporná. Preto plochy vymedzené zápornou silou treba považovať za záporné. Ak uvážime všetky tieto skutočnosti, vidíme, že napr. práca vykonaná silou zobrazenou na grafe I je nulová: S2 = – S1 ⇒ A = S1 + S2 = S1 + (– S1) = 0 (obr. 2.11).
Obr. 2.11 Grafické znázornenie I závislosti sily F od x-ovej súradnice (1) Podobne z grafov II, III a IV môžeme zistiť, že najväčšia kladná práca bola vykonaná silou zobrazenou na grafe II. a najväčšia záporná práca silou na grafe IV. Usporiadanie závislostí podľa veľkosti práce bude preto nasledovné: AII > AI = 0 > AIII > AIV.
c) Na obr. 2.12 je časová závislosť zrýchlenia častice pohybujúcej sa pozdĺž x-ovej osi. Usporiadajte časové intervaly I až IV podľa veľkosti prírastku kinetickej energie v danom časovom intervale. Prvý v poradí nech je časový interval, počas ktorého bol prírastok kinetickej energie najväčší (1).
Obr. 2.12 Časová závislosť zrýchlenia častice pohybujúcej sa pozdĺž x-ovej osi (1)
Kinetická energia je určená vzťahom 2
2
1mvEK = , kde m je hmotnosť pohybujúceho
sa objektu a v je rýchlosť pohybu. Najväčšia zmena (prírastok) kinetickej energie bude preto na tom časovom intervale, na ktorom došlo k najväčšej zmene rýchlosti. Z definície zrýchlenia: a = dv/dt dostaneme pre zmenu rýchlosti na časovom intervale 21;tt vzťah: ∆v
= ∫2
1
t
t
adt. Ak sa pohyb koná len v jednom smere (napr. v smere x-ovej osi), potom
predchádzajúci vzťah prejde do tvaru: ∫=∆2
1
t
t
adtv . Na posúdenie zmeny rýchlosti ∆v stačí
posúdiť veľkosť integrálu ∫2
1
t
t
adt na príslušných časových intervaloch podľa obr. 2.12.
Hodnoty integrálu sú závislé od veľkosti plochy pod príslušnou funkčnou závislosťou a(t). Z obr. 2.12 vidíme, že plocha pod funkciou a(t) na intervale I je ekvivalentná ploche 6-tich

18
štvorčekov, na intervale II je to opäť 6 štvorčekov, na intervale III je to 5 štvorčekov a na intervale IV sú to len 4 štvorčeky. Keďže zmena rýchlosti ∆v (a teda i zmena kinetickej energie) je úmerná veľkosti tejto plochy, pre usporiadanie intervalov podľa zmeny kinetickej energie platí: ∆EKI = ∆EKII > ∆EKIII > ∆EKIV .
Úlohy 1. Nájdite plošný obsah časti roviny ohraničenej čiarami: a) ,0,6 2 =−= yxxy
b) ,24,2 2 −+−==+ xxyyx c) .5,4 =+= yxxy
2. Vypočítajte plošný obsah časti roviny ohraničenej parabolou 862 +−= xxy a jej
dotyčnicami v bodoch ( ) ( ).0,4,3,1 == BA 3. Vypočítajte objem rotačného telesa, ktoré opíše daná elementárna oblasť pri rotácii okolo osi xo : .20,22 2 +≤≤≤≤− xyx
4. Nájdite objem rotačného telesa, ktoré vznikne rotáciou elementárnej oblasti určenej danými
krivkami okolo osi yo : .2
1,0,sin === yxxy
5. Vypočítajte objem rotačného telesa, ktoré dostaneme rotáciou rovinnej oblasti ohraničenej
súradnicovými osami a grafom funkcie ( ) xxf −= 9 okolo osi yo .
6. Vypočítajte dĺžku krivky 2,3,12 −∈+= xxy .
7. Vypočítajte dĺžku krivky 2,0,2 2
3
∈= xxy .
Riešenia
1. a) 36, b) ,2
9 c) .2ln8
2
15 − 2. .4
9 3. .
15
752π 4. ( )
.72
723122 −+ πππ 5. .
5
648π 6. .55
7. ( )11927
2 3 − .
Zoznam bibliografických odkazov 1. LABAŠ, V., KUBLIHA, M., MINÁRIK, S. Technická fyzika: Testy. Bratislava: STU,
2005. ISBN 80-227-2242-1 2. KRAJČOVIČ, J. et al. Fyzika: Návody na laboratórne cvičenia z fyziky. Bratislava: STU,
2000. ISBN 80-227-1370-8 3. MIŠÚTOVÁ, M. a kol. Matematika II s podporou programov Maxima a WinPlot. Trnava:
AlumniPress, 2010. ISBN 978-80-8096-127-5. [cit. 2012-10-06]. Dostupné na internete: http://is.stuba.sk
4. IVAN, Ján. Matematika 1. Bratislava: Alfa, 1986. 5. ELIAŠ, J., HORVÁTH, J. KAJAN, J. Zbierka úloh z vyššej matematiky 2. Bratislava:
STU, 1976.

19
3 NEVLASTNÝ INTEGRÁL
( ) ( ) dxxfdxxfb
ab
a∫∫ ∞→
∞
= lim nevlastný integrál funkcie f na intervale )∞,a
( ) ( ) dxxfdxxfb
aa
b
∫∫ −∞→∞−
= lim nevlastný integrál funkcie f na intervale ( b,∞−
( ) ( ) ( ) Rcdxxfdxxfdxxfc
c
∈+= ∫∫∫∞
∞−
∞
∞−
, nevlastný integrál funkcie f na intervale ( )∞∞− ,
( ) ( ) dxxfdxxfb
a
b
a∫∫+
→ +=
εε 0lim
nevlastný integrál z neohraničenej funkcie f na intervale ba,
( ) ( ) dxxfdxxfb
a
b
a∫∫−
→ +=
ε
ε 0lim
nevlastný integrál z neohraničenej funkcie f na intervale ba,
Riešené úlohy
Príklad 1. Vypočítajte nevlastný integrál dxx∫
∞
22
1. Výsledok overte využitím programu
Maxima.
Riešenie: Funkcia 2
1
x je definovaná a spojitá na intervale )∞,2 , teda pre každé b > 2
existuje [ ]2
111
1
1
22
1
2
1
22 +−=
−=−=
−= −
−
∫ bxx
xdx
x
bb
bb
.
Platí 2
1
2
1lim
1lim
2
11lim
1lim
1
22
22
=
+
−=
+−==∞→∞→∞→∞→
∞
∫∫ bbb
b
b bbdx
xdx
x.
Daný integrál je konvergentný. V programe Maxima zvolíme príkaz Integrate (obr. 3.1).
Obr. 3.1 Zadávanie nevlastného integrálu

20
Na pracovnej ploche sa vypíše:
Príklad 2. Vypočítajte nevlastný integrál dxe x∫∞−
12 . Výsledok overte v programe Maxima.
Riešenie: Funkcia xe2 je definovaná a spojitá na intervale ( ⇒∞− 1, je integrovateľná
na intervale 1,a , kde a < 1.
Platí ===
=
==
== ∫∫∫∫ −∞→−∞→−∞→∞−
dtedt
e
dtdx
dtdx
tx
dxedxea
t
aa
t
aa
x
a
x2
2
2
2
12
12
2
1lim
2lim
2
2
2
lim
21.22
2
=⇒=⇒==
βββα
b
a
[ ] ( ) ( )2
02
1lim
2
1
2
1lim
22222
2e
eeee a
aa
t
a=−=−==
−∞→−∞→.
Pri výpočte a
ae2lim
−∞→sme vychádzali z priebehu grafu funkcie xey = . Na zobrazenie daného
grafu použijeme v programe WinPlot položku explicitne (obr. 3.2).
Obr. 3.2 Zobrazenie grafu funkcie v programe WinPlot

21
V programe Maxima použijeme príkaz Integrate (obr. 3.3).
Obr. 3.3 Zadávanie nevlastného integrálu
Príklad 3. Vypočítajte nevlastný integrál dxx
∫−
1
021
1. Výsledok overte v programe Maxima.
Riešenie: Najprv určíme definičný obor funkcie: ( ) 21 xfDx −⇔∈ > 0 ( )( )xx −+⇔ 11 > 0 ( ) ( )1,1−=⇒ fD .
Z daného integračného intervalu a z tvaru funkcie vyplýva, že funkcia je definovaná na intervale )1,0 a v okolí bodu 1 je neohraničená.
Preto pre každéε > 0 také, že ε−1 > 0, existuje [ ] ==−
−
→
−
→ ++ ∫ε
ε
ε
ε
10
0
1
020
arcsinlim1
1lim xdx
x
( )( ) ( )2
1arcsinlim0arcsin1arcsinlim00
πεεεε
=−=−−=++ →→
.
Pri výpočte εε
arcsinlim0+→
sme vychádzali z priebehu grafu funkcie xy arcsin= .
Na zobrazenie daného grafu použijeme v programe WinPlot položku explicitne (obr. 3.4).
Obr. 3.4 Zobrazenie grafu funkcie v programe WinPlot

22
V programe Maxima zvolíme príkaz Integrate (obr. 3.5).
Obr. 3.5 Zadávanie nevlastného integrálu
Na pracovnej ploche sa vypíše:
Aplikácie 1. V magnetickom poli nekonečne dlhého priameho prúdovodiča vo vákuu platí, že vo zvolenom bode P vo vzdialenosti a od vodiča sú príspevky magnetickej indukcie dB od všetkých elementov Idl orientované súhlasne v smere vektorového súčinu Idl×r (1) . Pre veľkosť B magnetickej indukcie dostaneme:
∫∫∫∫∞
∞−
∞
∞−
→→
==×
==2
0
3
0
3
0 sin
4
sin
44 r
dlI
r
rdlI
r
rldI
dBBα
πµα
πµ
πµ
.
Vodič je na osi, jej kladný smer je určený smerom elektrického prúdu.
ααα
sin,
sincot
2
ar
adαdlgadl ==⇒−= .
Dosadením získame určitý integrál s premennou α od 0 do π:
[ ]a
I
a
I
a
I
a
adIB
πµ
πµα
πµ
αααα
πµ π
π
22
4cos
4sin
sinsin
400
00
022
20 =⋅=−=
⋅⋅⋅= ∫ .
Smer vektora magnetickej indukcie môžeme určiť aj Ampérovým pravidlom pravej ruky: Ak uchopíme prúdovodič do pravej ruky tak, aby vystretý palec ukazoval smer elektrického prúdu, potom zahnuté prsty ukazujú smer magnetickej indukcie. Jav bol prvý raz pozorovaný dánskym fyzikom Hansom Christianom Oerstedom (1777-1851). 2. Každý rádioaktívny prvok je charakterizovaný (2): energiou (maximálnou) emitovaných častíc, rozpadovou konštantou λ (resp. polčasom rozpadu T) a aktivitou. Okrem polčasu

23
sa definuje ešte stredná doba života τ ako súčet všetkých dôb života jednotlivých častíc,
delený celkovým počtom častíc:
( )( )∫
∫ ∞
∞
=−=−
=00
0
01
exp
exp
λλλ
λλτ dttt
N
dttNt
.
Takže súvis medzi strednou dobou života τ a polčasom rozpadu T je T = τ ln2. 3. Schrödingerova interpretácia de Broglieho vlny (2): Schrödinger považoval de Broglieho vlny za vlnenie hmotnostného poľa a elektrón za vlnový balík hmotnostného poľa. Rozpor je v tom, že každý elektrón na fotografickej platni vyvoláva „bodovú“ chemickú reakciu rádovo veľkosti molekuly fotografickej emulzie, ale elektrón ako vlnový balík by mal mať rozmery celého interferenčného obrazca a každý elektón by mal vytvoriť celý, i keď slabý interferenčný obraz. Ako jediná prijateľná sa ukázala Bornova hypotéza. Born v r. 1928 navrhol tzv. pravdepodobnostnú interpretáciu, ktorá platí nielen pre vlnenie priradené elektrónu, ale pre de Broglieho vlny vôbec. Podľa nej vlnová funkcia sa bude dať využiť na vyjadrenie miery pravdepodobnosti nájdenia častice v čase t v okolí bodu r . Vlnová funkcia nevyjadruje žiadnu zmenu fyzikálnej veličiny, takže sama o sebe nie je ani
merateľná. Merateľná je druhá mocnina jej absolútnej hodnoty 2Ψ . Jej význam podľa Borna
je nasledovný. Ak Ψ reprezentuje časticu, potom Ψ(r , t)2 je pravdepodobnosť nájdenia častice v jednotkovom objeme v okolí bodu r v čase t. Ak dV je objemový element v okolí bodu r , potom pravdepodobnosť P nájsť časticu v čase t v objemovom elemente dV je P = Ψ(r , t)2dV. Pri popise pohybu častice v smere osi x je objemový element dV nahradený veľkosťou intervalu dx a pravdepodobnosť Px nájsť časticu v intervale dx v okolí bodu x v čase t je Px = Ψ(x, t)2dx. Pokiaľ častica existuje v každom čase t, musí sa niekde v priestore, resp. na osi x nachádzať.
Potom pravdepodobnosti ( ) 1,2
=Ψ= ∫ dVtrPV
, resp. ( ) 1,2 =Ψ= ∫
∞
∞−
dxtxPx vyjadrujú, že
častica „niekde“ existuje so 100% pravdepodobnosťou. Funkcia Ψ(r , t)2, resp. Ψ(x, t)2 sa nazýva hustota pravdepodobnosti a uvedené rovnice sa nazývajú normovacie podmienky. O vlnových funkciách, ktoré spĺňajú podmienku normovateľnosti, hovoríme, že sú normované. Ak normovacia podmienka sa rovná 0, to značí, že častica vôbec neexistuje. Pravdepodobnosť, že sa častica nachádza v nejakom mieste v intervale (a, b), určíme
integrálom: ( ) dxtxPb
a
ab ∫ Ψ= 2, , čo je vyjadrené plochou na obr. 3.6.
Obr. 3.6 Vyjadrenie pravdepodobnosti výskytu mikrobjektu v intervale (a, b) (2)

24
4. Závislosť intenzity žiarenia absolútne čierneho telesa od vlnovej dĺžky vyžiarenej vlny a teploty telesa vyjadruje obr. 3.7.
Množstvo vyžiarenej energie ∫∞
=0
λλduu rastie so stúpajúcou energiou (2).
Obr. 3.7 Grafické znázornenie 4. príkladu (2) 5. V oblasti matematických metód plánovania a vyhodnocovania experimentov (3) pracujeme s rôznymi charakteristikami náhodnej premennej. Medzi ne patrí napr. hustota rozdelenia pravdepodobnosti náhodnej premennej X − funkcia fX (x). Jednou z vlastností tejto funkcie je,
že ( ) .1=∫∞
∞−
dxxf X
6. Pri analýze správania a vlastností reálnych systémov sa vytvára ich matematický model, ktorý umožňuje matematickými metódami skúmať podstatné vlastnosti daného systému. Správanie lineárnych spojitých systémov je všeobecne možné reprezentovať lineárnym systémom diferenciálnych rovníc. Ich riešením pri daných počiatočných podmienkach možno systém následne analyzovať. Relatívne jednoduchý matematický aparát, ktorý umožňuje nájsť riešenie daného lineárneho systému diferenciálnych rovníc, predstavujú integrálne transformácie spojitých funkcií2 (4).
Napríklad: Laplaceova transformácia ( ) ( ) dtetftfL pt−∞
∫=0
,
Fourierova transformácia ( ) ( ) dtetftfF tjω−∞
∞−∫= .
Úlohy 1. Vypočítajte nevlastné integrály:
a) ,ln
12
dxx
x∫∞
b) ∫∞
−
0
,.2
dxex x c) ,22
12 dx
xx∫∞
∞− ++
d) ,4
10
2 dxx∫∞− +
e) ,1
2
1
dxx
x∫ −
f) ( ).2cos
4
02∫
π
x
dx
2 Integrálne transformácie je možné použiť, ak transformované funkcie spĺňajú určité požiadavky (bližšie pozri napr. (4)).

25
2. Stanovte hodnotu parametra c tak, aby funkcia fX (x) = c/x2 pre x ∈ ⟨2; ∞) a fX (x) = 0 pre x ∈ (– ∞; 2) bola hustotou rozdelenia pravdepodobnosti nejakej spojitej náhodnej premennej X (3). (Pri riešení využite vlastnosť hustoty rozdelenia pravdepodobnosti uvedenú v odseku Aplikácie, príklad č. 5.) Riešenia
1. a) 1, b) ,2
1 c) ,π d) ,
4
π e) ,
3
8 f) diverguje.
2. c = 2. Zoznam bibliografických odkazov 1. KRAJČOVIČ, J. et al. Fyzika II. Bratislava: STU, 2006. ISBN 978-80-8096-003-2 2. KALUŽNÝ, J., OŽVOLDOVÁ, M. Fyzika III. Bratislava: STU, 1998. ISBN 80-227-
1091-1 3. PALUMBÍNY, Oleg. Matematické metódy plánovania a vyhodnocovania experimentu.
Trnava: AlumniPress, 2009. ISBN 978-80-8096-095-7. [cit. 2012-10-06]. Dostupné na internete: http://is.stuba.sk
4. VRBAN, Anton. Základy merania a regulácie. Bratislava: STU, 2002. [cit. 2012-10-06]. Dostupné na internete: http://is.stuba.sk
5. MIŠÚTOVÁ, M. a kol. Matematika II s podporou programov Maxima a WinPlot. Trnava: AlumniPress, 2010. ISBN 978-80-8096-127-5. [cit. 2012-10-06]. Dostupné na internete: http://is.stuba.sk
6. IVAN, Ján. Matematika 1. Bratislava: Alfa, 1986. 7. ELIAŠ, J., HORVÁTH, J. KAJAN, J. Zbierka úloh z vyššej matematiky 2. Bratislava:
STU, 1976.

26
4 PRIESTOR E2, E3. FUNKCIA DVOCH A VIAC PREMENNÝCH
Riešené úlohy
Príklad 1. Zistite definičný obor funkcie ( ) )2cos(4)ln(2
arcsin, 222
2
xyxxy
eyyxf
y
−−−−
+=+
.
Znázornite ho v priestore E2 a potom zobrazte hranice definičných oborov jednotlivých funkcií vystupujúcich v ( )yxf , pomocou programu WinPlot.
Riešenie: Zadaná funkcia ( )yxf , je zloženou funkciou a jej definičný obor je prienikom definičných oborov jednotlivých funkcií, ktorých superpozíciou vznikla. Postupne vyjadríme všetky podmienky, za ktorých sú funkcie definované a na záver nájdeme prienik týchto množín (obr. 4.1).
Nech 543
21 . ff
f
fff −+= .
Pre 2
arcsin1
yf = platí: 221
21 ≤≤−⇒≤≤− y
y,
22
+= yef : Ry∈ ,
)ln(
123 xy
f−
= : 22222 0110)ln( xyxyxyxyxy >⇒>−∧+≠⇒≠−⇒≠− ,
224 4 yxf −−= : 404 2222 ≤+⇒≥−− yxyx ,
)2cos(5 xf = : Rx∈ .
Definičným oborom funkcie f bude množina D(f) = ( ) ( ) ( ) ( ) ( )54321 fDfDfDfDfD IIII ,
t. j. D(f) = ( ) 4122:, 2222
2 ≤+∧>∧+≠∧≤≤−∈ yxxyxyyEyx (obr. 4.1).
−4 −3 −2 −1 1 2 3 4 5
−4
−3
−2
−1
1
2
3
4
x
y
Obr. 4.1 Hranice definičných oborov funkcií vytvárajúcich funkciu ( )yxf , . Vyšrafovaná časť predstavuje výsledný definičný obor funkcie f

27
Na znázornenie hraničných kriviek v programe WinPlot bolo použité dvojrozmerné okno a explicitné vyjadrenie funkcií, ktorých grafy zobrazujeme. Kružnicu možno s výhodou zobraziť v polárnych súradniciach (obr. 4.2).
Obr. 4.2 Vstupné údaje na zobrazenie kriviek v kartézskych a polárnych súradniciach v programe WinPlot
Príklad 2. Utvorte parciálnu funkciu z funkcie ( ) 1cos2sin3, ++= yxyxf na množine M:
0=x a na množine N: π=y . Zobrazte graf funkcie aj obidvoch parciálnych funkcií v programe Winplot. Riešenie: Funkcia ( )yxf , je definovaná pre všetky body priestoru E2 (t. j. roviny xy). Utvoriť
parciálnu funkciu z danej funkcie na M: 0=x znamená vytvoriť funkciu ( )yf ,0 jednej
premennej y dosadením hodnoty 0=x do zadanej funkcie( )yxf , . Potom parciálna funkcia
na M bude ( )yf ,0 = ( ) =yf 1cos2 +y a jej definičným oborom je Ry∈ . Podobne vyjadríme parciálnu funkciu z ( )yxf , na N, ak π=y .
( ) ( ) 1sin31cos2sin3, −=++== xxxfxf ππ , Rx∈ . Pre lepšiu predstavu zobrazíme teraz grafy uvažovaných funkcií v programe Winplot (obr. 4.5). Zvolíme trojrozmerné okno a zobrazíme najprv graf funkcie ( )yxf , pomocou explicitného vyjadrenia (obr. 4.3). Grafy obidvoch parciálnych funkcií zobrazíme ako krivky v priestore určené parametricky, postup zobrazovania je uvedený na obr. 4. 4.
0br. 4.3 Postup zobrazenia grafu explicitne zadanej funkcie ( )yxf ,

28
0br. 4.4 Postup zobrazenia kriviek zadaných parametricky v priestore
0br. 4.5 Časť grafu ( )yxf , a grafov parciálnych funkcií z ( )yxf , na množine M a N Príklad 3. Zostrojte graf funkcie ( ) 224, yxyxf −−= a porovnajte výsledok so zobrazením priesečníc grafu funkcie so súradnicovými rovinami v programe WinPlot . Riešenie: Zadaná funkcia je definovaná na celom priestore E2. Graf funkcie dvoch premenných v priestore E3 predstavuje plocha a zobraziť ju v závislosti od typu funkcie môže byť vo všeobecnosti veľmi náročná úloha. Pre funkcie, ktorých grafy sú plochy „jednoduchšieho” tvaru, stačí poznať niekoľko význačných kriviek na danej ploche. Tie pomôžu vzniku predstavy o grafe danej funkcie. Najčastejšie sa využívajú zobrazenia kriviek, ktoré sú priesečnicami grafu funkcie so súradnicovými rovinami xy, xz a yz, resp. s rovinami s nimi rovnobežnými.
f(y)= 2cosy+1
f(x)= 3sinx -1

29
Ich vyjadrenie nájdeme v našom prípade ako riešenie systému rovníc ( ) 04, 22 =∧−−= yyxyxf (krivka leží v rovine xz) ( ) 240, xxf −=⇒ ,
( ) 04, 22 =∧−−= xyxyxf (krivka leží v rovine yz) ( ) 24,0 yyf −=⇒ . Všimnime si, že každú z kriviek si možno predstaviť ako graf parciálnej funkcie z funkcie
( ) 224, yxyxf −−= na množine y = 0, resp. x = 0. Vďaka rotačnej symetrii sú teda
priesečnicami grafu funkcie ( ) 224, yxyxf −−= a súradnicových rovín xz a yz zhodné paraboly. Predstavu o grafe funkcie doplnia krivky ležiace na grafe v rovinách kolmých na predošlé roviny, nazývané vrstevnice grafu. Vrstevnicu v súradnicovej rovine z = 0 (t. j. priesečnicu
so súradnicovou rovinou xy) získame riešením systému rovníc ( ) 224, yxyxfz −−== a
z = 0 4.22 =+⇒ yx Hľadaná krivka je kružnica so stredom v bode S = (0, 0) a polomerom 2. Priesečnice s rovinami rovnobežnými s xy (z = k) nájdeme obdobným spôsobom. Sú to
kružnice s postupne sa meniacim polomerom kr −= 4 a ich analytické vyjadrenie má tvar
kyx −=+ 422 . Keďže hodnota 4 − k predstavuje druhú mocninu polomeru kružnice, 4 ≤k .
Grafom funkcie ( ) 224, yxyxf −−= je rotačný paraboloid s vrcholom v bode (0,0,4) a rotačnou osou totožnou s osou z (obr.4.7). Zobrazené sú časti parabol, ktoré sú priesečnicami danej plochy so súradnicovými rovinami xz a yz, a tiež kružnice v rovinách rovnobežných s rovinou xy − t. j. vrstevnice grafu. Vstupné údaje na zobrazenie priesečníc grafu funkcie ( ) 224, yxyxf −−= so súradnicovými rovinami v programe WinPlot sú uvedené na obr. 4.6.
0br. 4.6 Vstupné údaje na zobrazenie priesečníc grafu so súradnicovými rovinami v programe Winplot

30
0br. 4.7 Zobrazenie vrstevníc a priesečníc grafu ( ) 224, yxyxf −−= so súradnicovými rovinami xz a yz v programe WinPlot
Aplikácie Nielen v praktickom živote, ale aj v prírodných a technických vedách sa stretávame s tým, že jedna veličina môže závisieť od viacerých ďalších. Tieto závislosti je matematicky možné vyjadriť s použitím funkcie dvoch a viac premenných, kde závislá veličina predstavuje hodnotu tejto funkcie. V prípade funkcie dvoch premenných často využívame fakt, že jej grafom v trojrozmernom priestore je plocha, čím získavame lepšiu predstavu o vplyve jednotlivých nezávislých premenných na hodnotu funkcie. 1. Medzi široko využívané technologické postupy spájania materiálov patrí odporové zváranie. Definujeme ho ako spôsob zvárania, pri ktorom sa vytvára zvar bez prídavného materiálu krátkodobým prechodom prúdu vysokej intenzity cez miesto zvaru, pri súčasnom pôsobení tlaku. Zvárací proces je charakterizovaný tým, že na dosiahnutie zváracej teploty sa využíva teplo, vyvinuté zváracím prúdom pri spolupôsobení odporov v oblasti zvaru (1). Celkový elektrický odpor R v oblasti zvaru je funkciou pôsobiacej sily a vlastností zváraných materiálov. Pozostáva z odporu materiálu Rm a prechodového odporu Rp (R = Rm+Rp), pričom dôležité sú najmä prechodové odpory (2). Zároveň je celkový odpor funkciou zváracej sily F
a času, t. j.
= tF
fR ,1 . Vytvorené teplo Q závisí od veľkosti elektrického prúdu (I), času
pôsobenia (t) a elektrického odporu (R). Je vyjadrené vzťahom tRItRIQ 2),,( = . Zvarovne sú dnes už do vysokej miery automatizované a vyžadujú kvalitný softvér, ktorý riadi prácu robotov (obr. 4.8).

31
Obr. 4. 8 Roboty na bodové zváranie - výrobná linka VW v Bratislave (3). Každý automobil držia pohromade tisíce zvarov, až okolo 98 percent z nich je odporových
(bodových), pri ktorých dochádza k spájaniu kovov roztavením ich okrajov pôsobením elektrického prúdu
Pri práci priemyselných robotov je veľmi dôležitá presnosť určenia polohy pracovnej hlavy v priestore. Ak označíme požadovanú polohu referenčného bodu A2 = ( )222 ,, zyx a skutočnú
polohu referenčného A1=( )111 ,, zyx , celkovú chybu polohovania (4) v kartézskej súradnicovej
sústave určuje rovnica ( ) ( ) ( )2122
122
1221 zzyyxxAA −+−+−==∆ , čo je známe
vyjadrenie vzájomnej vzdialenosti dvoch bodov v trojrozmernom euklidovskom priestore (obr. 4.9).
Obr. 4. 9 Chyba polohovania v kartézskych súradniciach (4)
V regulačnej technike a pri inteligentnom riadení robotických systémov na splnenie požiadavky zabezpečiť zložitý výsledný pohyb sú navrhnuté motory s viacerými stupňami mechanickej voľnosti. Silové a momentové charakteristiky motorov s dvoma stupňami voľnosti (2) majú tvar plôch (na rozdiel od kriviek pre bežné motory s jedným stupňom voľnosti).
2. V oblasti kvantitatívnych ekonomických analýz je funkcia viac premenných účinným nástrojom pri výpočte rôznych ekonomických ukazovateľov (náklady, zisk), a takisto pri modelovaní a optimalizácii produkcie (5):

32
− Produktivita práce P závisí od objemu výroby V a počtu zamestnancov Z v danom období t
a je vyjadrená vzťahom Zt
V )P (V, Z, t = .
− Podnik prepravuje tovar z výrobného centra do troch spotrebných centier A, B, C. Denne na miesto spotreby prepraví počet pA , pB a pC výrobkov, pričom náklady na prepravu jednotky tovaru sú konštantné cA , cB a cC.
Potom funkcia N (pA, pB, pC ) = cA. pA + cB . pB + cC . pC určuje denné prepravné náklady z výrobného centra do miest spotreby. − Pri vytváraní ekonomických odhadov sa používajú produkčné funkcie, ktoré modelovo zobrazujú závislosť medzi technologickými vstupmi a výstupmi výrobného procesu. Produkčná funkcia vyjadruje závislosť objemu produkcie z v určitom výrobnom procese od výrobných faktorov x, y. Jednou z najviac rozšírených je Cobbova− Douglasova produkčná
funkcia, ktorá má tvar ,10,.: <<= αβα yAxzf kde A, α , β sú konštanty získané z praxe. Funkcia slúži na analýzu príspevku jednotlivých faktorov (práce a kapitálu) k rastu potenciálneho produktu a využívajú ju na vytváranie svojich predikcií napríklad bankové inštitúcie. Pre produkčnú funkciu dvoch premenných ),(: yxfzf = rovnica konštantného produktu
),( yxfc = je rovnicou vrstevnice grafu funkcie f, ktorá je nazývaná krivkou konštantnej hladiny produkcie. 3. Funkcia viac premenných je základom vzťahov vyjadrujúcich mnoho fyzikálnych zákonov a závislostí. Na ilustráciu uvádzame niekoľko príkladov (6), (7):
− v elektrostatike kapacita doskového kondenzátora d
SdsC
ε=),( , ε – elektrická
permitivita, S – plocha dosiek, d – vzdialenosť dosiek kondenzátora;
− elektrický odpor vodiča S
lSlR ρ=),( , ρ – merný elektrický odpor, l – dĺžka vodiča,
S- prierez vodiča,
− práca vykonaná elektrickým prúdom tIUtIUW ..),,( = , resp. tIRtIRW .),,( 2= , U – napätie, I – prúd, R – odpor, t – čas;
− v dynamike tekutín hydrodynamická odporová sila ( ) ,2
1,, 2vCSvSF ρρ = C – súčiniteľ
odporu, S – plocha, v – rýchlosť , ρ – hustota prostredia;
− odporová sila tekutiny pre teleso tvaru gule( ) rvvrF πη6, = (Stokesov zákon), r – polomer, v – rýchlosť , η – viskozita; − v hydrostatike hydrostatický tlak ghhp ..),( ρρ = , h – hĺbka, ρ - hustota prostredia;
− v kinetickej teórii plynov stredná rýchlosť molekúl plynu m
kTmTu
2),( = , T - teplota,
m - hmotnosť molekuly;
− v termodynamike stavová rovnica ideálneho plynu RTMV
m
V
nRTTVp ==),( , p - tlak,
V - objem, T - termodynamická teplota, n - látkové množstvo, m - hmotnosť, M - molekulová hmotnosť, R – univerzálna plynová konštanta.

33
4. Zvláštnym typom funkcií, ktorých hodnota závisí od polohy v priestore, sú polia. Napríklad teplota vzduchu v miestnosti sa môže meniť nielen od miesta k miestu, ale aj s časom, t. j. T = T (x, y, z, t). Hovoríme o časovo premennom teplotnom poli (8). Okrem skalárnych polí (kapitola 8) existujú aj vektorové a tenzorové polia, ktoré v sebe nesú ešte viac informácie. Typickým vektorovým poľom je napríklad elektromagnetické pole, v materiáli možno definovať tenzorové pole napätia alebo deformácie. Poznámka: Pokiaľ je vo funkcii jednou z nezávisle premenných čas, vždy uvažujeme za jej definičný obor takú množinu, kde platí 0≥t .
Úlohy 1. Vypočítajte hodnotu funkcie
a) ( ) ( ) )3ln(,, zyezyxf zyx ++= ++ v bode M = (2, 0, t),
b) ( ) ( )zyxzyxf ++= arcsin,, v bode A =(1, ½, 0),
c) ( ) ( ) tezyxtzyxT −++=,,, v bode B =(3, 2, 0,10). V nasledujúcich úlohách zistite a znázornite definičný obor funkcie:
2. ( )1
11,
−+=
yxyxf .
3. ( )22
1,
xyyxf
−= .
4. ( )2225
1,
yxyxf
−−= .
5. ( ) 229, yxyxf −−= .
6. ( )y
xyxf2
3, −= .
7. ( )xy
yxf2
, = .
8. ( ) ( )( )22 11, yxyxf −−= .
9. ( ) ( )12
2222 4ln
)3sin(12, +
−−+−+=ye
yxxyxyxf .
10. ( ) ( )xyyxyyxf 4ln., 222 +−= π .
11. ( ) ( )yxyxf += arcsin, .
12. ( ) 2224,, zyxzyxf −−−= .
Zostrojte grafy funkcií a porovnajte so zobrazením v programe WinPlot. Charakterizujte krivky, ktoré sú vrstevnicami grafu. 13. ( ) yxyxf −−= 2, .
14. ( ) 22, yxyxf += .
V programe WinPlot zobrazte graf funkcie
15. 22sin),( yxyxf += .
16. ( )22 2),(22
yxeyxf yx += −− .
Utvorte parciálnu funkciu z funkcie f na množine M: 17. ( ) 123, 22 ++= yxyxf , ( )0=xM . Zobrazte jej graf.
18. ( ) ( )2,2,, =−−−= yMzyxzyxf .
19. ( ) ( ) ( )1,2,ln,, === zyMxyzzyxf . 20. Nech sú náklady na mzdy pri stavbe domu dané vzťahom C(x, y) = K + Lx 2 − Mxy + Ny2, kde K, L, M, N sú kladné konštanty, x je počet napr. tesárov a y počet murárov. Ako sa zmenia náklady na mzdy, ak sa počet tesárov zvýši o 1?

34
Riešenia
1. a) ( ) ( ) 0,)ln(,0,2 2 ≠+= + ttetf t , b) Funkcia v tomto bode nie je definovaná, pretože
pre daný bod A = (1, ½, 0) nie je splnená podmienka 11 ≤++≤− zyx , c) ( ) .510,0,2,3 10−= eT 2. ( ) 10:,)( 2 ≠∧≠∈= yxEyxfD , t. j. celá rovina okrem bodov priamok x = 0 a y = 1.
3. ( ) yxEyxfD ≠∈= :,)( 2 , t. j. celá rovina okrem bodov priamok y = x a y = − x.
4. ( ) 25:,)( 222 ≠+∈= yxEyxfD , t. j. celá rovina okrem bodov ležiacich na kružnici
2522 =+ yx . 5. ( ) 9:,)( 222 ≤+∈= yxEyxfD , t. j. kruh K ( S (0,0), r = 3).
6. ( ) 00:,)( 2 >∧≥∈= yxEyxfD , t. j. časť roviny v 1. kvadrante s výnimkou bodov ležiacich na osi x. 7. ( ) ( ) ( ) 0000:,)( 2 <∧<∨>∧>∈= yxyxEyxfD t. j. časť roviny v 1. a 3. kvadrante s výnimkou bodov ležiacich na osiach x, y . 8. ( ) :,)( 2EyxfD ∈= ( ) ( )1111 ≥∧≥∨≤∧≤ yxyx
9. ( ) :,)( 2EyxfD ∈=
41 2222 <+∧≥+ yxyx
10. ( ) 0:,)( 2 >∧≥∈= xyyxEyxfD
11.
−4 −3 −2 −1 1 2 3 4 5
−4
−3
−2
−1
1
2
3
4
x
y
-4 -3 -2 -1 1 2 3 4 5
-4
-3
-2
-1
1
2
3
4
x
y
( ) xyxyEyxfD −≤∧−−≥∈= 11:,)( 2
-4 -3 -2 -1 1 2 3 4 5
-4
-3
-2
-1
1
2
3
4
x
y
-4 -3 -2 -1 1 2 3 4 5
-4
-3
-2
-1
1
2
3
4
x
y

35
14. Grafom funkcie je rotačný paraboloid s vrcholom v bode (0,0,0) a rotačnou osou totožnou s osou z, vrstevnice grafu sú sústredné kružnice so stredom na osi z.
15.
12. ( ) 4:,,)( 222
3 ≤++∈= zyxEzyxfD t. j. guľa so stredom v (0,0,0) a r = 2.
13. Grafom funkcie je rovina (zobrazené sú časti priamok, ktoré sú priesečnicami danej roviny so súradnicovými rovinami), vrstevnice grafu sú priamky rovnobežné s priamkou xy −= 2 .
2
2
2

36
16.
17. ( ) 12,0 2 += yyf .
18. ( ) .,2, zxzxf −−=
19. ( ) ( )xxf 2ln1,2, = .
20. ( ) ( ) −+−+=−+=∆ 22 ++ NyyxMxLKyxCyxCyxC 11),(),1(),(
( ) ( ) ( ) LMyLxMxyLxyxMxLNyMxyLxK +−=−−+−+=−− 211 2222 ++ .
Zoznam bibliografických odkazov 1. Odporové zváranie. [cit. 2012-06-01]. Dostupné na internete:
http://www.strojarskatechnologia.info/10-odporove-zvaranie-%E2%80%93-podstata-procesu-rozdelenie/
2. KOSORIN, Dušan. Elektrotechnika. Trnava: MTF STU, 1999. [cit. 2012-06-01]. Dostupné na internete: http://is.stuba.sk

37
3. Ako sa vyrába auto. [cit. 2012-06-01]. Dostupné na internete: http://auto.etrend.sk/auto-biznis0/fotoreportaz-ako-sa-vyroba-auto.html
4. VELÍŠEK , KATALINIČ, B., JAVOROVÁ, A. Priemyselné roboty a manipulátory. Bratislava: STU, 2006. [cit. 2012-06-01]. Dostupné na internete: http://is.stuba.sk
5. FECENKO, J. SAKÁLOVÁ, K. Matematika 2. Bratislava: IURA EDITION. 2004. ISBN 80-89047-73-4
6. MACHÁČEK, M. Encyklopedie fyziky. Mladá fronta. 1995. ISBN 80-204-0237-3 7. HAJKO, V. a kol. Fyzika v príkladoch. Bratislava: SNTL, 1960. 8. BAIS, Sander. Rovnice. Symboly poznání. Dokořán 2009. ISBN 978-80-7363-228-1 9. IVAN, Ján. Matematika 2. Bratislava: Alfa, 1989. 10. ELIAŠ, J., HORVÁTH, J. ,KAJAN, J. Zbierka úloh z vyššej matematiky 3. Bratislava:
STU, 1980. 11. MIŠÚTOVÁ, M. a kol. Matematika II s podporou programov Maxima a WinPlot. Trnava:
AlumniPress, 2010. ISBN 978-80-8096-127-5. [cit. 2012-06-01]. Dostupné na internete: http://is.stuba.sk

38
5 PARCIÁLNE DERIVÁCIE, DOTYKOVÁ ROVINA KU GRAFU FUNKCIE DVOCH PREMENNÝCH, FUNKCIA URČENÁ IMPLICITNE
Riešené úlohy Príklad 1. Vypočítajte parciálne derivácie funkcie( )yxf , na jej definičnom obore podľa
oboch premenných, ak( ) ( ) yyx xyxyexyxf +−−⋅+= 2lncosarcsin,2
.
Riešenie: Definičným oborom funkcie ( ) ( ) yyx xyxyexyxf +−−⋅+= 2lncosarcsin,2
je
množina ( ) [ ] ( ) ( ) +∈∧<∧≤≤−∈= RxxyxEyxfD 211;, 2 . Pri počítaní parciálnej derivácie podľa určitej premennej3 postupujeme podľa známych pravidiel derivovania funkcií jednej premennej, pričom všetky ostatné premenné považujeme za konštanty. V našom príklade to znamená, že pri derivovaní funkcie f podľa premennej x budeme y považovať za konštantu a pri derivovaní funkcie f podľa premennej y budeme za konštantu považovať x.
( ) 1
22
2
12cos
1
1, 2 −+⋅−
−⋅⋅+−
=∂
∂ yyx yxyx
xyyexx
yxf,
( ) ( ) ( ) xxyx
xeyxey
yxf yyxyx ln12
1sincos0
, 22 2 ⋅+−⋅−
−−⋅+⋅⋅+=∂
∂.
V programe Maxima pri počítaní parciálnych derivácií môžeme použiť priamo príkaz diff, kde uvedieme premennú, podľa ktorej derivujeme alebo si vyberieme z hlavnej lišty ponuku
Calculus - Differentiate (obr.5.1) a údaje uvádzame v dialógových oknách.
Obr. 5.1 Počítačové riešenie príkladu v programe Maxima
3 Parciálnu deriváciu funkcie ( )Xf podľa premennej ix označujeme jedným zo znakov ix
f
∂∂
, ( )
ix
Xf
∂
∂,
ixf ′ ,
( )Xfix′ .

39
Príklad 2. Nájdite parciálne derivácie funkcie xyzzzxxyu +−+= 323 5 pre[ ] 3,, Ezyx ∈ .
Vypočítajte hodnotu funkcie ( )Aux′ , ak ( )2,0,1 −=A .
Riešenie: Pri počítaníx
u
∂∂
považujeme premenné y a z za konštanty a u derivujeme ako
funkciu jednej premennej x: yzxzyx
u +−+=∂∂
0103 .
Podobne pri počítaníy
u
∂∂
považujeme x a z za konštanty a u derivujeme ako funkciu jednej
premennej y: xzxyy
u +−+=∂∂
003 2 .
Pri výpočtez
u
∂∂
považujeme x a y za konštanty a u derivujeme ako funkciu jednej premennej
z: xyzxz
u +−+=∂∂ 22 350 .
Tieto parciálne derivácie funkcie ( )zyxfu ,,= sú definované v celom priestore 3E .
Na obr. 5.2 je výpočet derivácií v programe Maxima:
Obr. 5.2 Výpočet parciálnych derivácií funkcie v programe Maxima

40
Pre ( )Aux′ po dosadení súradníc bodu A do príslušnej parciálnej derivácie dostaneme
( ) ( ) 20200211003 −=−⋅+−−⋅⋅+=
∂∂
Ax
u.
Ak chceme na výpočet hodnoty parciálnej derivácie v bode A použiť Maximu, môžeme postupne do funkcie dosádzať súradnice tohto bodu za jednotlivé premenné x, y, z. Umožňuje nám to položka Substitute z Simplify z ponuky hlavnej lišty (obr.5.3). Pri použití príkazu subst v dialógovom riadku, je veľmi dôležité správne poradie zadávanej hodnoty a premennej.
Obr. 5.3 Výpočet hodnoty parciálnej derivácie v bode A v programe Maxima realizovaný postupným dosádzaním súradníc bodu A pomocou príkazu substitute
Ďalšou z možností výpočtu hodnoty ľubovoľného výrazu je priame použitie príkazu evaluate v pracovnom okne:

41
Príklad 3. Vypočítajte xyyz ′′′ , ak yxyxz = .
Riešenie: Počítame parciálnu deriváciu tretieho rádu4, pričom funkciu z postupne derivujeme podľa jednotlivých premenných, t.j. podľa premennej x a následne 2-krát podľa premennej y. Predpokladajme, že 0>x a 0≠y .
Pred začatím derivovania funkciu prepíšme do tvarux
y
x
xy
x
eyeyyxzy
xln
ln ⋅=⋅== , pretože
vzhľadom na to, že derivujeme podľa premennej x, funkcia z je typu ( ) ( )xgxf . Prvá parciálna derivácia funkcie z podľa x bude
( )1ln1ln1
ln1ln
+=
+⋅⋅=
⋅+⋅⋅⋅=
⋅
∂∂=
∂∂
xxyy
xxy
xy
xx
yxyey
xx
z y
x
y
x
y
xx
y
x
.
Ak výsledok derivácie podľa premennej x následne derivujeme podľa premennej y, dostaneme parciálnu derivácie druhého rádu (zmiešanú) podľa premenných x a y:
( )
+⋅
∂∂=
∂∂
∂∂=
∂∂∂
1ln2
xxyx
z
yyx
z y
x
,
yx
z
∂∂∂ 2
( ) ( ) 22
ln1ln1
ln1ln −⋅⋅⋅⋅+−=
−⋅⋅⋅+⋅= yxxxx
yxxxx y
x
y
x
.
Parciálna derivácia tretieho rádu podľa premenných x,y,y je parciálnou deriváciou podľa premennej y z funkcie, ktorá je parciálnou deriváciou druhého rádu z funkcie z podľa premenných x a y vypočítanou v predchádzajúcom kroku.
( ) ,ln1ln 22
2
3
⋅⋅⋅⋅+−
∂∂=
∂∂∂
∂∂=
∂∂∂ −yxxxx
yyx
z
yyx
z y
x
( ) ( ) ( )
( ) ( ).2lnln1ln
2lnln1ln
34
322
2
3
−−
−−−
+⋅⋅⋅⋅⋅⋅+=
=
⋅−⋅+⋅−⋅⋅⋅⋅⋅⋅+−=
∂∂∂
yyxxxxxx
yxyyxxxxxxyx
z
y
x
y
x
y
x
Výpočet v programe Maxima:
4 Tretiu parciálnu deriváciu xyyz ′′′ zvykneme označovať aj, resp.2
3
yx
z
∂∂∂
.

42
Obr. 5.4 Počítačové riešenie príkladu v programe Maxima Na zjednodušovanie výrazov obsahujúcich logaritmy, exponenty a odmocniny pomocou konverzie na kánonický tvar slúži príkaz radcan.
Príklad 4. Zistite, či je rovnicou 02 23 =+− xxyy a bodom ( )1,1=A implicitne určená funkcia a nájdite jej prvú a druhú deriváciu.
Riešenie: Funkcia ( ) 23 2, xxyyyxF +−= je definovaná a spojitá na celom 2E . Všetky jej
parciálne derivácie sú spojité na celom 2E , t.j. aj v okolí bodu A.
Pretože ( ) ( ) 0111211,1 23 =+⋅⋅−== FAF a súčasne ( ) [ ] ,01121323 22 ≠=⋅−⋅=−=′Ay xyAF
môžeme tvrdiť, že je implicitne určená danou rovnicou a bodom A práve jedna spojitá funkcia ( )xfy = , ktorá má v A derivácie ( )xf ′ , ( )xf ′′ .

43
Pre prvú a druhú deriváciu funkcie( )xf platí ( )y
x
F
Fxf
′′
−=′ , ( )y
yyxyxx
F
yFyFFxf
′′′′+′′′+′′
−=′′22
,
pričom ( )xfy = a ( )xfy ′=′ .
Ak xyFx 22 +−=′ a xyFy 23 2 −=′ , potom ( )xy
xy
F
Fxf
y
x
23
222 −−=
′′
−=′ , 023 2 ≠− xy a ( )xfy = .
Pre 2=′′xxF , 2−=′′xyF , yFyy 6=′′ ( ) ( )
yy F
yyy
F
yyyxf
′′+′−−=
′′⋅+′⋅−⋅+−=′′
22 6426222,
023 2 ≠− xy , kde xy
xyy
23
222 −−=′ a ( )xfy = .
Pri výpočte prvej i druhej derivácie môžeme postupovať aj nasledovným spôsobom:
rovnicu ( )[ ] ( ) 02 23 =+− xxxfxf derivujeme podľa x
( )[ ] ( ) ( ) ( ) 02223 2 =+′−−′ xxfxxfxfxf
02223 2 =+′−−′ xyxyyy
( ) xyxyy 2223 2 −=−′
xy
xyy
23
222 −−=′ , 023 2 ≠− xy pričom ( )xfy = .
Derivovaním rovnosti 02223 2 =+′−−′ xyxyyy podľa x, pričom považujeme y, y′ za funkcie premennej x, určímey ′′ .
( ) 0222236 22 =+′′−′−′−′′+′ yxyyyyyy
( ) ( ) 0232246 22 =−′′++′−′−′ xyyyyyy
( ) ( )xyyyyyy 232246 22 −′′−=+′−′−′
xy
yyyy
23
6422
2
−′+′−−=′′ , 023 2 ≠− xy a
xy
xyy
23
222 −−=′ .
Využitie programu Maxima pri výpočte čiastkových derivácii xF ′ yF ′ , xxF ′′ , xyF ′′ , yyF ′′ .

44
Príklad 5. Napíšte rovnicu dotykovej roviny τ a normály n ku grafu funkcie
229
1:
yxzf
−−= v bode dotyku ( )?,2,2 −=T .
Riešenie: Funkcia f je definovaná na množine ( ) ( ) 9;, 222 <+∈= yxEyxfD .
Dotyková rovina ku grafu funkcie f je daná vzťahom:
( )( ) ( )( ) ( ) 0,, 0000000 =−−−′+−′ zzyyyxfxxyxf yx , kde ( )000 ,, zyxT = je dotykový
bod. Aby sme tento predpis mohli použiť, potrebujeme dopočítať z-ovú súradnicu 0z dotykového
bodu T a určiť funkčné hodnoty parciálnych derivácii v bode ( )00 , yx .
( )( )3229
,yx
xyxf x
−−=′ ⇒ ( )
( )2
229
22,2
22=
−−−=−′xf ,
( )( )3229
,yx
yyxf y
−−=′ ⇒ ( )
( )2
229
22,2
22=
−−−=−′yf .
Z-ovú súradnicu dotykového bodu T vypočítame ako funkčnú hodnotu funkcie v bode( )2,2 − ,
t.j. ( )( )
1229
12,2
220 =
−−−=−= fz ⇒ bod dotyku T má súradnice T = (2, – 2, 1).
Po dosadení do všeobecnej rovnice dotykovej roviny dostávame hľadanú dotykovú rovinuτ : ( ) ( ) ( ) 012222 =−−+−− zyx ⇒ 0722 =−−− zyx . Pre overenie správnosti nášho výpočtu i názornej predstave počítaného si graf funkcie
229
1:
yxzf
−−= i dotykovú rovinu τ ku grafu tejto funkcie zobrazíme pomocou
programu WinPlot (obr.5.5a,b).
Obr. 5.5a Zadanie dotykovej roviny ku grafu funkcie 229
1
yxz
−−= v programe WinPlot
45
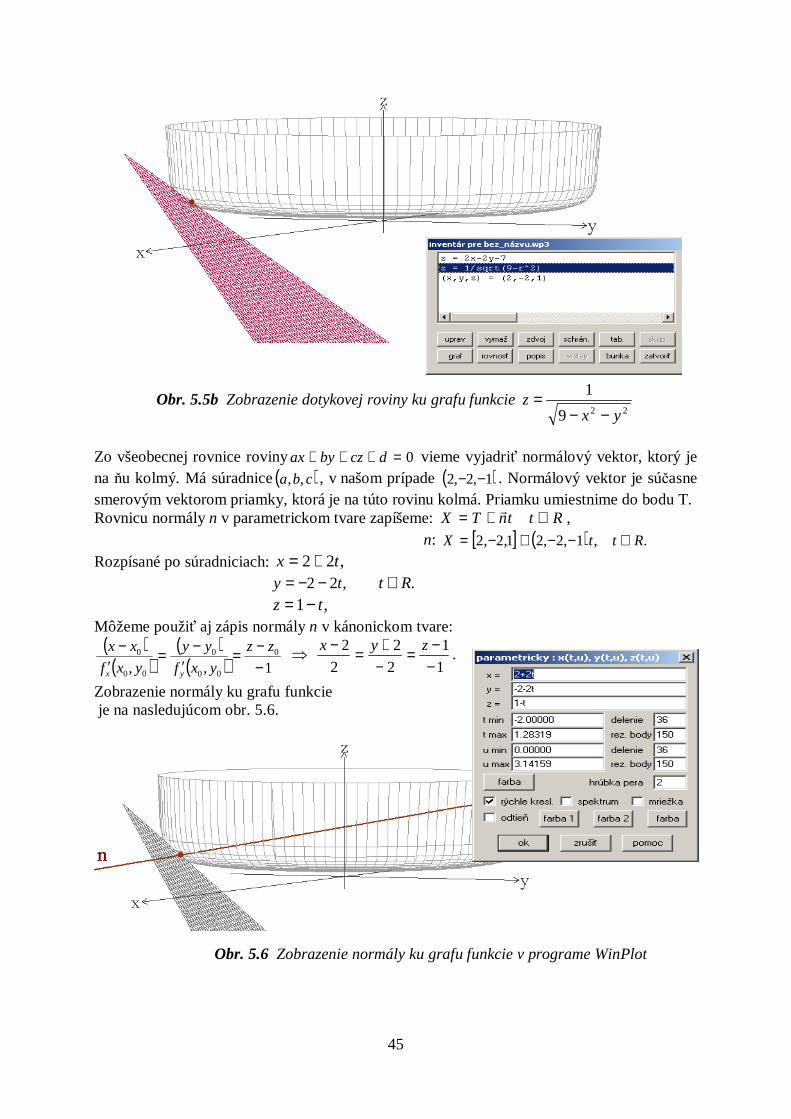
Obr. 5.5b Zobrazenie dotykovej roviny ku grafu funkcie 229
1
yxz
−−=
Zo všeobecnej rovnice roviny 0=+++ dczbyax vieme vyjadriť normálový vektor, ktorý je na ňu kolmý. Má súradnice( )cba ,, , v našom prípade ( )1,2,2 −− . Normálový vektor je súčasne smerovým vektorom priamky, ktorá je na túto rovinu kolmá. Priamku umiestnime do bodu T. Rovnicu normály n v parametrickom tvare zapíšeme: RttnTX ∈+= r
, n: [ ] ( ) .,1,2,21,2,2 RttX ∈−−+−=
Rozpísané po súradniciach: ,22 tx += ,22 ty −−= .Rt ∈
,1 tz −= Môžeme použiť aj zápis normály n v kánonickom tvare:
( )( )
( )( ) 1,,
0
00
0
00
0
−−=
′−=
′− zz
yxf
yy
yxf
xx
yx
⇒ 1
1
2
2
2
2
−−=
−+=− zyx
.
Zobrazenie normály ku grafu funkcie je na nasledujúcom obr. 5.6.
Obr. 5.6 Zobrazenie normály ku grafu funkcie v programe WinPlot

46
Príklad 6. Postupom z predchádzajúceho príkladu nájdite rovnicu dotykovej roviny τ
a normály n ku grafu funkcie 22
),( yxeyxf −−= v bode A = (1/2, 1/2, ?). Graf plochy, dotykovú rovinu a normálu zobrazte pomocou programu WinPlot.
Riešenie:
eefzA
1
2
1,
2
122
2
1
2
1
==
=
−
−,
( )e
fxeyxf xyx
x1
2
1,
2
1)2(.,
22−=
′⇒−=′ −− ,
( )e
fyeyxf yyx
y1
2
1,
2
1)2(.,
22−=
′⇒−=′ −− ,
01
2
11
2
11: =
−−
−−
−−e
zye
xe
τ e
yxz
2−+−=⇒ ,
:n .,1
,1
2
1,
1
2
1Rtt
ezt
eyt
ex ∈−=−=−=
Obr. 5.7 Zobrazenie grafu funkcie 22
),( yxeyxf −−=
Obr. 5.8 Zobrazenie grafu funkcie f a dotykového bodu A =
e
1,
2
1,
2
1

47
Obr. 5.9 Zobrazenie grafu funkcie f, dotykového bodu A a normály n
Obr. 5.9 Zobrazenie grafu funkcie f, dotykového bodu A, normály n a dotykovej roviny τ

48
Aplikácie 1. Vyjadrenie parciálnych derivácií je nevyhnutné pri hľadaní extrémov funkcie viac premenných, viac viď nasledujúce kapitoly č.6 a č.7. Samozrejme toto má široké uplatnenie pri určovaní „najlepšieho“ riešenia (pri optimalizácii) nielen v matematike, fyzike, ekonómii, štatistike, chémii, t.j. v oblastiach, z ktorých sme aplikačné príklady vyberali, ale aj v mnohých iných vedných oboroch, v ktorých dokážeme analyticky vyjadriť funkčnú závislosť skúmanej veličiny od ostatných parametrov.
Napríklad pri hľadaní viazaného lokálneho extrému funkcie y
xyyxf2
),( += na kružnici
522 =+ yx , vyjadrujeme parciálne derivácie pomocou Lagrangeovej funkcie
( )52
),( 22 −+++= yxy
xyyxF λ podľa oboch premenných x aj y :
xyxyx
yxF λλ 20020),( +=++++=
∂∂
,
yy
xyy
xy
yxF λλ 22
0202),(
22+−=+++−=
∂∂
.
Na výpočet Hessiánu sú potrebné parciálne derivácie druhého rádu:
λ20),(
2
2
+=∂
∂x
yxF, λ2
40
),(32
2
++=∂
∂yy
yxF, 1
),(2
=∂∂
∂yx
yxF, 1
),(2
=∂∂
∂xy
yxF.
Poznámka: Pre parciálne derivácie vyšších rádov platí, že pri ich výpočte nezáleží na poradí, v akom ich počítame, ak v danom bode a jeho blízkom okolí sú funkcia a jej parciálne derivácie spojité. 2. Pri hľadaní optimálneho distribučného centra vo výrobnej logistike (5) potrebujeme určiť
x
TTC
∂∂
a y
TTC
∂∂
funkcie Total Transport Cost (TTC), popisujúcej absolútne dopravné náklady
( ) ( )∑=
−+−⋅⋅=N
LLLLL yyxxCMTTC
1
22 , kde ( ) ( )22LLL yyxxd −+−= je vzdialenosť
zákazníka L so súradnicami ( )LL yx , od distribučného centra so súradnicami ( )yx, , ML je prepravované množstvo L-tého materiálu a CL je jednotková cena prepravy tohto materiálu. Pri určovaní parciálnej derivácie funkcie TTC podľa premennej x opíšeme súčin LL CM ⋅ ako konštantu, pretože nezávisia od premennej x, zvyšok derivujeme ako zloženú funkciu, t.j.
( ) ( )( ) ( )( )0122
1 12
122
1
+⋅−⋅⋅−+−⋅⋅⋅=∂
∂ −
=∑ LLL
N
LLL xxyyxxCM
x
TTC, po úprave môžeme
písať ( ) ( )
( ) ( )( ) ( )∑∑
== −+−
−⋅⋅=−⋅⋅
−+−⋅
⋅=
∂∂ N
LLL
LLLN
LL
LL
LL
yyxx
xxCMxx
yyxx
CM
x
TTC
122
122
22
.
Rovnakým spôsobom postupujeme pri parciálnej derivácii funkcie TTC podľa premennej y.
( ) ( )( ) ( )( )1202
1 12
122
1
⋅−⋅+⋅−+−⋅⋅⋅=∂
∂ −
=∑ LLL
N
LLL yyyyxxCM
y
TTC,
( )( ) ( )∑
= −+−
−⋅⋅=
∂∂ N
LLL
LLL
yyxx
yyCM
y
TTC
122
.

49
3. V štatistike sa môžeme stretnúť s logaritmickou funkciou vierohodnosti (6):
( ) ( )( ) ( ) ( )=−−
−−⋅=−−⋅⋅= ∑∑==
−−n
i
in
i
in
xn
xnxxxL
12
2
12
22112
21 22ln
2
1ln
22ln,,...,,,ln
σµπσ
σµπσσµ
( )∑
=
−−−−=
n
i
ixnn
12
22
22ln
2ln
2 σµπσ .
Jej parciálne derivácie podľa premenných µ a 2σ budú:
( ) ( )∑∑∑===
−=−=−−−=∂
∂ n
ii
n
i
in
i
i xxxL
12
12
12
1
2
200
ln µσσ
µσ
µµ
,
( ) ( ) ( ) ( )∑∑==
−−+−=⋅−⋅−−−⋅−=
∂∂ n
ii
n
i
i xnxnL
1
2
421
222
22 2
1
21
20
1
2
ln µσσ
σµσσ
.
Využívame ich pri hľadaní funkcie maximálnej vierohodnosti. 4. Parciálne derivácie sú súčasťou parciálnych diferenciálnych rovníc, pomocou ktorých sú opísané mnohé fyzikálne zákony. (7) Parciálnou diferenciálnou rovnicou je napr. Poissonova rovnica, Poissonova rovnica s nulovou pravou stranou – tzv. Laplaceova rovnica, Schrödingerove rovnice, rovnica vedenia tepla, vlnová rovnica atď.
V chémii (15) môžeme spomenúť Fickov zákon difúzie 2
2
.x
cD
c
∂∂=
∂∂τ
.
Ďalej napr. kmity struny, na ktorú nepôsobia žiadne vonkajšie sily, sú opísané vlnovou
rovnicou ( ) ( ) 0,1
,2
2
22
2
=∂∂⋅−
∂∂
txutv
txux
, kde u(x, t) predstavuje výchylku struny (pozdĺžnu
alebo priečnu) v mieste x a v čase t. Ak je počiatočná výchylka zadaná ľubovoľnou funkciou
f(x) a počiatočná rýchlosť zmeny výchylky t
uu
∂∂=& je nulová, t.j. ak ( ) ( )xfxu =0,
a ( ) 00, =xu& , potom postupná vlna opísaná funkciou ( ) ( ) ( )( )vtxfvtxftxu −++=2
1,
je riešením danej vlnovej rovnice a priamym dosadením sa môžeme presvedčiť, že spĺňa aj uvedené počiatočné podmienky. Riešeniami vlnovej rovnice sú tiež funkcie( ) ( ) ( )tkxtxu ωsinsin, = , ( ) ( ) ( )tkxtxu ωcossin, = ,
( ) ( ) ( )tkxtxu ωsincos, = , ( ) ( ) ( )tkxtxu ωcoscos, = , ktorým sa hovorí stojaté vlny.(8)
Pomocou parciálnych derivácií môžeme ukázať, že funkcia ( )
ta
bx
eta
u2
2
4
2
1−−
=π
vyhovuje
diferenciálnej rovnici 01
2=′−′′ txx u
au , ktorá popisuje vedenie tepla. (3)
( )( )
( )( )bxe
tabx
tae
tau ta
bx
ta
bx
x −⋅−=−⋅⋅
−⋅=′−−−−
2
2
2
2
4
3324
4
12
4
1
2
1
ππ,
( )( )
( )
⋅+−⋅⋅
−⋅−=′′−
−−
−12
4
1
4
1 2
2
2
2
42
24
33
ta
bx
ta
bx
xx ebxta
eta
uπ
,

50
( ) ( ) ( ) ( )
⋅−⋅
−−⋅⋅+⋅−=′ −−
−−−
−−2
2
2
42
1
42
3
142
1
2
1 2
2
2
2
ta
bxetet
au ta
bx
ta
bx
t π.
Dosadíme do parciálnej diferenciálnej rovnice pre vedenie tepla a upravujeme: ( ) ( ) ( ) ( ) ( ) ( )
0
42
1
2
11
24
1
2
52
2
44
2
324
2
2
4
33
2
2
2
2
2
2
2
2
=
−⋅+⋅−⋅−
+−−⋅−
−−
−−
−−
−−
ta
bxee
taa
eta
bxe
tata
bx
ta
bx
ta
bx
ta
bx
ππ
( ) ( )0
42
1
2
11
24
1
2
52
2
2
332
2
33=
−+−−
+−−−
ta
bx
tata
bx
ta ππ
( ) ( )0
84
1
4
1
8 55
2
333355
2
=−−+−−
ta
bx
tatata
bx
ππππ
00 = . 5. Parciálne derivácie sa využívajú vo vektorovej analýze pri výpočte gradientu skalárneho poľa, výpočte divergencie a rotácie vektorovej funkcie, podrobnejšie pozri kapitolu č.8. Tieto sa využívajú predovšetkým vo fyzike. Ak bude napr. funkcia ( )zyxf ,, určovať teplotu v jednotlivých bodoch ( )zyx ,, miestnosti,
jej parciálne (čiastočné) derivácie zyx ∂
∂∂∂
∂∂
,, určujú nárast funkcie v troch smeroch pozdĺž
príslušných osí x, y, z. Gradient funkcie ( )zyxf ,, vytvára z funkcie ( )zyxf ,, vektor
( ) ( ) ( ) ( )
∂∂
∂∂
∂∂=
z
zyxf
y
zyxf
x
zyxfzyxg
,,,
,,,
,,,,
r, ktorý určuje v každom bode ( )zyx ,, smer
jeho najprudšieho stúpania a jeho veľkosť sa rovná veľkosti tejto zmeny na jednotke dĺžky.
Divergencia a rotácia štyroch vektorov HEBDrrrr
,,, pri zadaných funkciách, hustote nábojaρ
a hustote prúdu ir
, ktoré spĺňajú rovnicu kontinuity 0=+∂∂
idivt
rρ, zase umožňujú zápis
Maxwellových rovníc, ktoré charakterizujú elektrické a magnetické polia:
ρ=Ddivr
(Coulombov zákon + princíp superpozície),
0=Bdivr
(neexistencia magnetických nábojov),
t
BErot
∂∂−=r
r (Faradayov zákon elektromagnetickej indukcie),
t
DiHrot
∂∂+=r
rr(Ampérov zákon + Maxwellov posuvný prúd). (8)
Častokrát sa využíva skrátený zápis pomocou operátorov nabla5 (Hamiltonov operátor)
∂∂
∂∂
∂∂=∇
zyx,,
r a Laplaceovho operátora 2
2
2
2
2
2
zyx ∂∂+
∂∂+
∂∂=∇⋅∇=∆
rr.
Vo fyzike sú vedenie tepla alebo difúzia opísané pomocou ∆ rovnicou ρ=∂∂+∆⋅ ft
fa , kde
5 V rôznej literatúre sa stretneme s rôznym označovaním operátora nabla:∇
r, ∇∇∇∇ alebo iba jednoduchým∇ .
Vždy treba mať na zreteli , že ak pôsobí nabla na skalárnu funkciu, vytvorí z nej vektor.

51
f je v prípade vedenia tepla teplota a v prípade difúzie koncentrácia difundujúcej látky. Ako
ďalší príklad môžeme uviesť rovnicu kontinuity 0=∇+∂∂
it
rrρ, ktorá vyjadruje vzťah medzi
prúdom a zmenou hustoty alebo vlnovú rovnicu v tvare ρ=∂∂+∆⋅ ft
fa 2
2
. (8)
Chémia používa ∆ v zápise Schrödingerovej rovnice - napr. pre vodíkový atóm má táto
rovnica tvar 04
2
0
2
2 =
−+ ψ
πεψ∆
r
eE
me
h, kde ψ je vlnová funkcia, me je pokojová hmotnosť
elektrónu, e jeho náboj, ε0 permitivita vákua, E je celková energia. (14)
6. Vlnová rovnica, popisujúca šírenie ľubovoľných vĺn v priestore má tvar 2
2
2
1
t
u
cu
∂∂=∆ .
Harmonické kmity, ktoré sa budú šíriť pružným prostredím rýchlosťou c napr. v smere osi x ,
sú dané rovnicou ( )xtuc
xtAu ,sin =
−= ω , kde c
x je časové oneskorenie vzhľadom na zdroj
( tAu ωsin0 = ).
Vlnovú rovnicu redukujeme na tvar 2
2
22
2 1
t
u
cx
u
∂∂=
∂∂
, kde
−−=∂∂
c
xt
c
A
x
u ωωcos ,
−−=∂∂
c
xt
c
A
x
u ωωsin
2
2
2
2
a
−=∂∂
c
xtA
t
u ωω cos ,
−−=∂∂
c
xtA
t
u ωω sin22
2
. (7), (4)
7. Zo stavovej rovnice ideálneho plynu RTpV = môžeme usudzovať, že tlak plynu p je
funkciou dvoch premenných, a to objemu V a teploty T: V
TRp = .
Parciálna derivácia funkcie p podľa V , t.j. ( )2
21
1)(
V
RTVRT
V
RTV
V
p −=⋅−⋅=∂
∂=∂∂ −
−
nám
hovorí ako rýchlo sa pri konštantnej teplote T mení tlak plynu p v závislosti od zmeny objemu V .
Parciálna derivácia funkcie p podľa T je V
R
V
R
V
TR
T
p =⋅=∂
∂=
∂∂
1V
. Táto derivácia nám zase
ukazuje mieru závislosti zmeny tlaku plynu p od zmeny jeho teploty T pri stálom objeme V. Môžeme ju chápať ako podiel diferenciálu dp a diferenciálu dT, ak platí, že .konštV = . 8. S každým meraním sú spojené aj absolútne a relatívne chyby merania. Chyby merania pri nepriamych metódach merania sú chyby výsledku merania veličiny Y, ktorá sa vypočíta pomocou známej funkčnej závislosti z n veličín určených priamym meraním. Ak výslednú nameranú veličinu určuje známa matematická funkcia napr. troch premenných A, B, C, ktoré sme zistili priamym meraním, predpokladáme ( ) pnm CBACBAfY ⋅⋅== ,, .
Jej totálny diferenciál je dCC
YdB
B
YdA
A
YdY
∂∂+
∂∂+
∂∂= . Po ekvivalentných úpravách
totálneho diferenciálu, vrátane ktorých sme diferenciály nahradili malými prírastkami
( )YdY ∆→ , môžeme písať Y
C
C
C
C
Y
Y
B
B
B
B
Y
Y
A
A
A
A
Y
Y
Y ⋅∆⋅∂∂+⋅∆⋅
∂∂+⋅∆⋅
∂∂=∆
.

52
Parciálne derivácie sú pnm CBmAA
Y ⋅⋅=∂∂ −1 , pnm CnBA
B
Y ⋅⋅=∂∂ −1 , 1−⋅⋅=
∂∂ pnm pCBAC
Y.
Podielom %100⋅∆=Y
YYδ označujeme relatívnu chybu merania.
Preto po dosadení môžeme písať výslednú relatívnu chybu nášho merania:
,111
pnmCpnm
pnmBpnm
pnmApnm
YCBA
CpCBA
CBA
BCnBA
CBA
ACBmA ⋅⋅+⋅⋅+⋅⋅= −−− δδδδ
po úprave CBAY pnm δδδδ ⋅+⋅+⋅= , resp. maximálnu relatívnu chybu merania
CBAY pnm δδδδ ⋅+⋅+⋅= . (9)
9. Wattmetrická metóda merania účinníka je nepriama meracia metóda. Účinník určuje vzťah
IU
Pk
⋅== ϕcos . Pri výpočte maximálnej relatívnej chyby merania závislej od chyby
merania výkonu Pδ , napätia Uδ , prúdu Iδ počítame parciálne derivácie funkcie k podľa
jednotlivých premenných:
IUP
IUPP
k
⋅=
⋅⋅∂
∂=∂∂ 11
,
( )IU
PU
I
PU
I
P
UU
k
⋅−=⋅−⋅=
⋅∂∂=
∂∂ −−
221 1 ,
( )2
21 1IU
PI
U
PI
U
P
II
k
⋅−=⋅−⋅=
⋅∂∂=
∂∂ −− . (9)
10. V geometrických a numerických aproximáciách zohráva veľmi dôležitú úlohu lokálne nahradzovanie zložitých funkcií lineárnymi funkciami. Pod linearizáciou funkcie f v bode ( )00 , yx rozumieme nahradenie pôvodnej funkcie ( )yxf , funkciou ( )yxL , :
( ) ( ) ( )( ) ( )( ).,,,, 00000000 yyyxfxxyxfyxfyxL yx −′+−′+=
Napríklad funkciu ( ) 22
, yxeyxf +−= môžeme v okolí bodu
−2
1,
2
1 aproximovať funkciou
( ) yxyxL −−= 1, , nakoľko 12
1,
2
1 04
1
4
12
2
1
2
12
====
−+−
−+
−eeef ,
( ) ( ) 1122
1,
2
1 4
1
4
1
2
1,
2
1
22−=−⋅=
−⋅=
−′+−
−
+− exef yxx ,
( ) 1122
1,
2
1 4
1
4
1
2
1,
2
1
22−=−⋅=
⋅=
−′+−
−
+− eyef yxy .
.
Dotyková rovina je popísaná funkciou( ) yxyxyxL −−=
+−
−⋅−= 12
11
2
111, , t.j.
v bode
−2
1,
2
1, resp. v jeho okolí môžeme písať yxe yx −−≈+− 1
22.

53
11. Využitie parciálnych derivácií možno nájsť tiež vo financiách, konkrétne pri analýze závislosti ceny opcie od zmeny jednotlivých parametrov, ako sú cena podkladového aktíva, volatilita, bezriziková úroková miera, doba do splatnosti opcie. Cena opčnej prémie sa odvodzuje od ceny príslušného podkladového aktíva, ktorým môžu byť akcie, komodity či výmenné kurzy. Finančné deriváty slúžia na ochranu investora pred náhlymi zmenami cien podkladových aktív. (17) 12. Využitie parciálnych derivácií v ekonómii ukážeme na nasledujúcom príklade. Nech je podľa odhadu zisk z predaja dvoch druhov džúsu daný funkciou
( ) ( )( ) ( )( )yxyyxxyxP 768040457030, −+−++−−= centov, kde x je cena prvého a y je cena druhého druhu. Prvý druh sa predáva po 50 centov za plechovku a druhý po 52 centov za plechovku. Pomocou marginálnej analýzy vieme vypočítať odhad zmeny denného zisku, ak obchodník zvýši cenu druhého džúsu o 1 cent a cenu prvého ponechá nezmenenú:
( ) ( ) ( ) ( ) ( ) ( )( )
( ) ( ) ( ) ( )[ ]( ) .centov1274076801430
,52,50152,50
,,1,
52,50
52,50
=−⋅−+−+⋅+⋅−
=
∂∂=−+=
∂∂=−+=
yyxx
y
yxPPP
y
yxPyxPyxPMPy
Denný zisk sa navýši o 12 centov. (11) 13. V Základoch teórie automatického riadenia sa parciálne derivácie využívajú pri určovaní diferenciálnej citlivosti dynamických systémov. (12) Pod citlivosťou dynamického systému rozumieme zmenu jeho správania v statickom aj v dynamickom režime vyvolanú zmenou parametrov jeho štruktúry alebo zmenou hodnôt parametrov jeho prvkov. Pri konkrétnom tvare procesu v dynamickom systéme je správanie systému definované jeho charakteristickými funkciami. Preto je možné definovať tiež citlivosť charakteristických funkcií. Jednorozmerná dynamická sústava so vstupom ( )ξu a odozvou ( )ξy je daná zobrazením
( ) ( ) ξαξξ ui ,,, 0uGy = , kde iαξ ,G predstavuje systémovú funkciu, závislú od parametrov
prvkov sústavy iα , pre ni ....,,2,1= .
Absolútna diferenciálna citlivosť dynamickej sústavy na zmenu parametra je definovaná vzťahom:
( ) ( ) ( )i
ii
i
i
ααξαξ
αξ α
∂∂=
∂∂= ,
,G
GS , ktorý udáva zmenu systémovej funkcie iαξ ,G
pri elementárnej zmene i-teho parametra iα .
Relatívnu diferenciálnu citlivosť definujeme vzťahom:
( ) ( )( )
( )( ) ( ) ii
i
i
i
i
i
i
i
i αα ξαξ
αα
αξαξ
αα
αξξ SG
GG
GR ⋅=
∂∂⋅=
∂∂=
,,
,ln,ln
, ktorý udáva zmenu logaritmu
systémovej funkcie vzhľadom na zmenu logaritmu parametra iα .
Obe citlivosti sú funkcie argumentu systémovej funkcie iαξ ,G a vyjadrujú dynamické
vlastnosti sústavy, ktoré sa prejavujú v jej správaní (analógia s citlivosťou organizmov).

54
Úlohy Vypočítajte parciálne derivácie danej funkcie v bode A.
1. ( )x
y
y
xyxf +=, ; ( )1,2=A . 3. ( ) yeyxf x sin, = ; ( )2,1=A .
2. ( ) xyeyxyxf += 23, ; ( )1,0=A . 4. ( )y
xarctgyxf =, ; ( )1,0=A .
Vypočítajte parciálne derivácie danej funkcie podľa jednotlivých premenných. 5. ( ) 323 253, yyxxyxf −+= . 12. ( ) bccaabu 32 += .
6. ( ) yyxyxyxf 2sin, 223 +−= . 13.
S
lR ρ= .
7. ( ) ( )yx
yxgyxf
+=
2cot, .
14. ( ) mghh,mE =p , kde 2ms10 −=g .
8. ( ) ( ) ( ) 322cos2,, yzxzxyzyxf −+−= .
9. yx
yxz
−+= ln .
10. ( )22ln yxxz +−= .
11. ( )yzzxu 23 += .
15. ( )2
2
k
mvv,mE = .
16. ( )2
2121 4
1,,e
r
πrQQF ⋅=
ε.
17. πrsrS += 2π .
18. Vypočítajteu
z
∂∂
,v
z
∂∂
, ak y
x
xez = , 22 vux += , uvy = .
19. Dokážte, že funkcia ( )222 sin yxyz −= vyhovuje rovnici xzy
zxy
x
zy 22 =
∂∂+
∂∂
.
20. Dokážte, že funkcia ( )yx
xyyxf
−=, vyhovuje rovnici
yxfff yyxyxx −
=′′+′′+′′ 22 .
21. Dokážte, že funkcia ( ) ( )yx eeyxf += ln, vyhovuje rovniciam 1=′+′ yx ff ,
( ) 02 =′′−′′⋅′′ xyyyxx fff .
22. Dokážte, že funkcia ( ) uv veuevuf +=, vyhovuje rovnici uuvuvvvvvuuu fvfuff ′′′+′′′=′′′+′′′ .
23. Ukážte, že pre funkciu ϕmru m cos= platí 0112 =′′+′+′′ ϕϕu
ru
ru rrr .
24. Ukážte, že pre funkciu ( ) rBeAeu arar += − , kde 222 zyxr ++= a BA, sú konštanty,
platí uauuu zzyyxx2=′′+′′+′′ .
Nájdite y′ , y ′′ funkcie zadanej implicitne rovnicou a bodom.
25. 0162 22 =−−− yxyx , ( )0,4=A . 26. 03 =++− yxey , ( )0,3−=A . 27. Nájdite rovnicu dotyčnice a normály ku grafu funkcie zadanej implicitným vzťahom
01ln =−+ yxy v bode ( )1,1=A . Nájdite rovnicu dotykovej roviny a normály ku grafu funkcie v danom bode A. 28. 222 yxz += ; ( )3,1?,=A . 30. xyz = ; ( )2,2?,=A .

55
29. xxyyxxz +−+= 24 2 ; ( )2?,,1=A . 31. ( )4ln 2 −+= yxz ; ( )?,3,4−=A . Nájdite parciálne derivácie druhého rádu danej funkcie.
32. ( ) 2322 zyxu −= . 35. ( )yxxyz −+= cos .
33. 222 zyxu ++= .
36.
yx
yxarctgz
+−= .
34. xez y sin2= . 37.
1
1ln
2
2
−+=
y
xz .
Vypočítajte: 38. zyxu ′′′ , ak ( )xyzu cos= . 40. xxyyz ′′′′ , ak ( )22ln yxyz += .
39. xyyz ′′′ , ak ( )xyyz ln= . 41. xxxz ′′′ , xxyz ′′′ , yyyz ′′′ , ak ( )xyz += sincos .
42. Kinetická energia kmitov evolventného kyvadla je daná vzťahom ( ) 2202
1 ϕϕ &l rmEk −= .
Určte
∂∂
ϕ&kE
dt
d. (16)
43. Napíšte totálny diferenciál účinníka popísaného vzťahom IU
Pk
⋅== ϕcos .
44. Maxwellov rozdeľovací zákon v plynoch má tvar ( ) RT
Mv
evRT
MvP 222
3 2
24
−
=π
π , kde M je
molárna hmotnosť, R je plynová konštanta, T je teplota plynu a v je rýchlosť molekúl.
Zo vzťahu ( )
0=∂
∂v
vP určte najpravdepodobnejšiu rýchlosť molekuly v pri danej teplote T .
Vyjadrite ( )2
2
v
vP
∂∂
. (13)
45. Pohybová rovnica pre voľné torzné kmitanie hriadeľa ( )( )
( )( )
∂
∂∂∂=
∂∂
x
txGJ
xt
txI xpx
,,2
2 ϕϕ,
kde ( )xI je moment zotrvačnosti na jednotku dĺžky vzhľadom na pozdĺžnu os, ( )xpGJ je torzná
tuhosť hriadeľa, G je modul pružnosti v šmyku, ( )xpJ je polárny moment plochy priečneho
rezu, má riešenie ( ) ( )tDtCxC
BxC
Atxtt
Ω+Ω
Ω+Ω= cossincossin,ϕ , kde I
GJC p
t = je
rýchlosť šírenia torzných vĺn. Overte správnosť riešenia. (16) 46. Pohybová rovnica pre voľné ohybové kmitanie nosníka pri zanedbaní rotačnej
zotrvačnosti je ( )( )
( )( )
0,,2
2
2
2
2
2
=
∂∂
∂∂+
∂∂
x
txEJ
xt
txvxx
Sρ , kde ρ je špecifická hustota, ( )xS je
priečny prierez nosníka, ( )xpEJ tuhosť nosníka v ohybe, má riešenie
( ) ( )( )tFtExDxCxBxhAv tx Ω+Ω+++= cossincossincoshsin, αααα , kde 4
2
EJ
SΩ= ρα a
Ω vlastná kruhová frekvencia. Overte správnosť riešenia. (16)

56
47. Rôzne kvapky odletujúce z rôznych miest roztočeného kolesa bicykla vyletujú do rôznej
výšky ( )g
vR
g
vRvy
2sinsin
2,,
202
20
0 ++−=∗ ϕϕϕ . Určte parciálne derivácie podľa jednotlivých
premenných. (13)
Riešenia
1. ( )4
3=′ Af x , ( )2
3−=′ Af y . 2. ( ) 1=′ Af x , ( ) 0=′ Af y . 3. ( ) 2sineAf x =′ , ( ) 2coseAf y =′ .
4. ( ) 1=′ Af x , ( ) 0=′ Af y . 5. xyxf x 109 2 +=′ , 22 65 yxf y −=′ . 6. yxyxf x sin23 22 −=′ ,
2ln2cos2 23 yy yxyxf +−=′ .
7. ( ) ( ) ( )
( )2
2
22cot
sin
2
yx
yxgyxyx
xy
f x +
−+⋅−
=′ , ( ) ( ) ( )
( )2
222
2
cotsin
yx
yxgyxyx
x
f y +
−+⋅−
=′ .
8. ( ) ( ) 324sin2 yzxzxyyf x −+−−=′ , ( ) ( ) 2223sin2 yzxzxyxf y −+−−=′ ,
( ) ( ) 322sin2 yzxzxyf z −−−=′ .
9. ( ) ( )
( )2
11
yxyx
yxyxyx
f x
−⋅−+
⋅+−−⋅=′ , ( ) ( ) ( )
( )2
11
yxyx
yxyxyx
f y
−⋅−+
−⋅+−−⋅=′ .
10. 22
222
21
yxx
yx
x
f x+−
+−
=′ , 22
222
20
yxx
yx
y
f y+−
+−
=′ .
11. ( ) 1233 −+=′ yzx zxyzu , ( ) ( )zxzxzu yz
y 23ln23 ++=′ ,
( ) ( )
+
+++=′zx
yzzxyzxu yzz 23
223ln23 .
12. ( ) ( ) 12 322322
−+++=′ bcbca cacabca
ab
bu ,
( ) ( ) ( )bc
ccacaabca
ab
au bcbc
b2
32ln32322
++++=′ ,
( ) ( )
+
+++=′ca
bccabc
bcaabu bc
c 32
332ln
232 .
13. S
lR =′ρ ,
SRl
ρ=′ , 2S
lRS
ρ−=′ . 14. ( )
ghm
hmEp =∂
∂ ,,
( )mg
h
hmEp =∂
∂ ,.
15. ( )
2
, 2v
m
vmEK =∂
∂,
( )mv
v
vmEK =∂
∂ ,. 16.
22
4
11 r
QFeQ ⋅=′
πε,
21
4
12 r
QFeQ ⋅=′
πε,
321
2
1
r
QQFer ⋅−=′
πε. 17. srSr ππ +=′ 2 , rSs π=′ . 18. ve
y
xu
y
xez y
x
y
x
u 2
2
21 −⋅
+=′ ,

57
uey
xv
y
xez y
x
y
x
v 2
2
21 −⋅
+=′ . 25.
yx
yxy
+−=′ ,
( )3
22 242
yx
xxyyy
+−+=′′ . 26.
1
1
+=′
yey ,
( )31+−=′′y
y
e
ey . 27. 032 =−+ yx , 012 =−− yx . 28. 0324 =−−+ zyx ,
1
3
2
1
4
1
−−=−=− zyx
; 0324 =++− zyx , 1
3
2
1
4
1
−−=−=
−+ zyx
. 29. 035 =−−+ zyx ,
1
2
5
1
−−==− z
yx
. 30. 022 =−−+ zyx , 1
22
2
1
−−=−=− z
yx
. 31. 0146 =−−+ zyx ,
16
34
−=−=+ zy
x . 32. ( )( ) 22222 56 zyxyxuxx −−=′′ , ( )( ) 22222 56 zxyyxuyy −−=′′ ,
( )3222 yxuzz −=′′ , ( )22224 yxxyzuu yxxy −−=′′=′′ , ( )22212 yxxzuu zxxz −=′′=′′ ,
( )22212 yxyzuu zyyz −−=′′=′′ . 33. 3
22
u
xuuxx
−=′′ , 3
22
u
yuuyy
−=′′ , 3
22
u
zuuzz
−=′′ , 3u
xyuxy
−=′′ ,
3u
yzuyz
−=′′ , 3u
xzuxz
−=′′ . 34. xez yxx sin2−=′′ , xez y
xy cos2 2=′′ , xez yyy sin4 2=′′ .
35. ( )yxzxx −−=′′ cos , ( )yxzz yxxy −+=′′=′′ cos1 , ( )yxzyy −−=′′ cos . 36. 22
2
yx
xyzxx +
−=′′ ,
22
22
yx
yxzxy +
−=′′ , 22
2
yx
xyzyy +
=′′ . 37. ( )
( )22
2
1
12
x
xzxx
+−=′′ , 0=′′xyz ,
( )( )22
2
1
12
−+=′′
y
yzyy .
38. ( ) ( ) ( )xyzxyzxyzzyx cos3sin1222 −⋅− . 39. 0 . 40. ( ) ( )4224225 36564 yxyxyxy ++− . 41. ( )xyzxxx +=′′′ sinsin , ( ) ( )xyyzxxy +=′′′ sinsincos ,
( )[ ]( ) ( ) yyxyyyxyzyyy cossinsincos3coscossinsin 3 ⋅⋅++++=′′′ .
42. ( ) ( ) 20
20 2 ϕϕϕϕ
ϕ&l&&l
&rrmrm
E
dt
d k −−−=
∂∂
.
43. dIIU
PdU
IU
PdP
IUdI
I
kdU
U
kdP
P
kdk
22
1
⋅−
⋅−
⋅=
∂∂+
∂∂+
∂∂= .
44. ( )
−
=
−+
=∂
∂ −−−
RT
Mvve
RT
Mv
RT
Mevve
RT
M
v
vP RT
Mv
RT
Mv
RT
Mv 22
2
3
2222
3
22
422
22
4
222
ππ
ππ
( )M
RTvv
RT
Mvv
v
vP 20020
2
=∨=⇔=
−⇔=
∂∂
⇒ ,
( ) =∂
−+
∂
=∂
∂
−−
2
2322
3
2
2
2 222
24
22
v
RT
Mevve
RT
M
v
vP
RT
Mv
RT
Mv
ππ

58
−+
−+
−+
=−−−−
vRT
Mevev
RT
Mv
RT
Mvee
RT
M RT
Mv
RT
Mv
RT
Mv
RT
Mv
22
262
22
222
4 2322222
3 2222
ππ .
47. ( )( )
g
v
g
v
v
Rvy 020
0
0 0sin,, ++−=
∂∂ ∗
ϕϕ,
( )( )0coscossin
,, 200 ++−=
∂∂ ∗
ϕϕϕϕ
ϕR
g
vRvy,
( )( )0sin0
,,0 ++=∂
∂ ∗
ϕϕR
Rvy.
Zoznam bibliografických odkazov 1. MIŠÚTOVÁ, M. a kol. Matematika II s podporou programov Maxima a WinPlot.
Trnava: AlumniPress, 2010. ISBN 978-80-8096-127-5. [cit. 2012-06-01]. Dostupné na internete: http://is.stuba.sk
2. IVAN, Ján. Matematika 1. Bratislava: Alfa, 1986. 3. ELIAŠ, J., HORVÁTH, J. KAJAN, J. Zbierka úloh z vyššej matematiky 3. Bratislava:
Alfa, 1967. 4. KRAJČOVIČ, J. a kol. Fyzika II. STU Bratislava, 2006. ISBN 978-80-8096-003-2 5. RYBANSKÝ, R., VIDOVÁ, H., BOŽEK, P. Výrobná logistika, Bratislava:
Vydavateľstvo STU, 2006. ISBN 80-227-2463-7 6. MARKECHOVÁ, D., STEHLÍKOVÁ, B., TIRPÁKOVÁ, A. Štatistické metódy a ich
aplikácie. UKF Nitra, 2011. ISBN 978-80-8094-807-8. 7. GREGA, A., KLUVANEC, D., RAJČAN, E. Matematika pre fyzikov. Bratislava: 1974. 8. MOJŽIŠ, Martin. TEMPO (teória elektromagnetického poľa). [cit.2012-06-10].
Dostupné na internete: http://sophia.dtp.fmph.uniba.sk/~mojzis/Tempo.pdf 9. RIEDLMAJER, R., FILANOVÁ, J., JANČUŠKA, I., VRAGAŠ, S. Elektrotechnika.
Príklady na cvičenia. STU Bratislava, 2006. 10. BAIS, Sander. Rovnice. Symboly poznání. Praha: Dokořán, 2009. ISBN 978-80-7363-
228-1 11. GRINČOVÁ, Anna. Matematika II a jej využitie v ekonómii. Košice: 2012. 12. VRBAN, A., HALAMA, J., HUSÁROVÁ, B. Základy teórie automatického riadenia.
Bratislava: STU, 1999. [cit. 2012-06-01]. Dostupné na internete: http://is.stuba.sk 13. LABAŠ, V., MINÁRIK, S. Fyzika I. STU Bratislava, 2002. ISBN 80-227-1671-5 14. GAŽO, J. a kol. Všeobecná a anorganická chémia. Bratislava: Alfa/SNTL. 1978. 15. HAZLINGER, M., MORAVČÍK, R. Chemicko-tepelné spracovanie materiálov.
Trnava: AlumniPress, 2010. ISBN 978-80-8096-123-7 16. PEKÁREK, F., SABO, M., NAĎ, M. Dynamika. Návody na cvičenia. Bratislava: STU,
1990. ISBN 80-227-0304-4 17. URBANÍKOVÁ, Marta. Predikcia a eliminácia menových rizík. Education and
Technology, Monograph. 2010. Radom, Instytut Technologii Eksploatacii 2010. ISBN 978-83-7209-915-5

59
6 LOKÁLNE EXTRÉMY FUNKCIE DVOCH PREMENNÝCH, VIAZANÉ LOKÁLNE EXTRÉMY FUNKCIE DVOCH PREMENNÝCH
Základné vzťahy používané pri hľadaní lokálnych a viazaných lokálnych extrémov:
( ) 0=∂∂
Ax
f, ( ) 0=
∂∂
Ay
f
nutná podmienka existencie lokálnych extrémov funkcie dvoch premenných
postačujúca podmienka existencie lokálnych extrémov funkcie dvoch premenných
funkcia f má v bode A lokálne minimum
funkcia f má v bode A lokálne maximum
( ) ( ) ( )yxgyxfyxF ,,, λ+= F - Lagrangeova funkcia, číslo λ - Lagrangeov multiplikátor,
( ) 0, =yxg - väzba
Riešené úlohy Príklad 1. Využitím programu Maxima nájdite lokálne extrémy funkcie
2223 52),( yxxyxyxf ++−= . Riešenie: Funkcia je diferencovateľná v každom bode definičného oboru a podľa nutnej
podmienky lokálnych extrémov musí platiť ( ) 0=∂∂
Ax
f, ( ) 0=
∂∂
Ay
f.
Využitím programu Maxima najskôr nájdeme parciálne derivácie prvého rádu funkcie f podľa jednotlivých premenných. Použijeme položku Differentiate v menu Calculus (obr. 6.1).
Obr. 6.1 Zadávanie parciálnej derivácie funkcie
( ) ( )
( ) ( )( ) ( ) ( )
0,
, 22
2
2
2
2
2
22
2
2
2
>
∂∂∂−
∂∂⋅
∂∂=
∂∂
∂∂∂
∂∂∂
∂∂
=yx
Af
y
Af
x
Af
y
Af
yx
Afyx
Af
x
Af
D
( )0
2
2
>x
Af
∂∂ ( )
∂∂
0.resp 2
2
>y
Af
( )0
2
2
<x
Af
∂∂ ( )
∂∂
0.resp 2
2
<y
Af
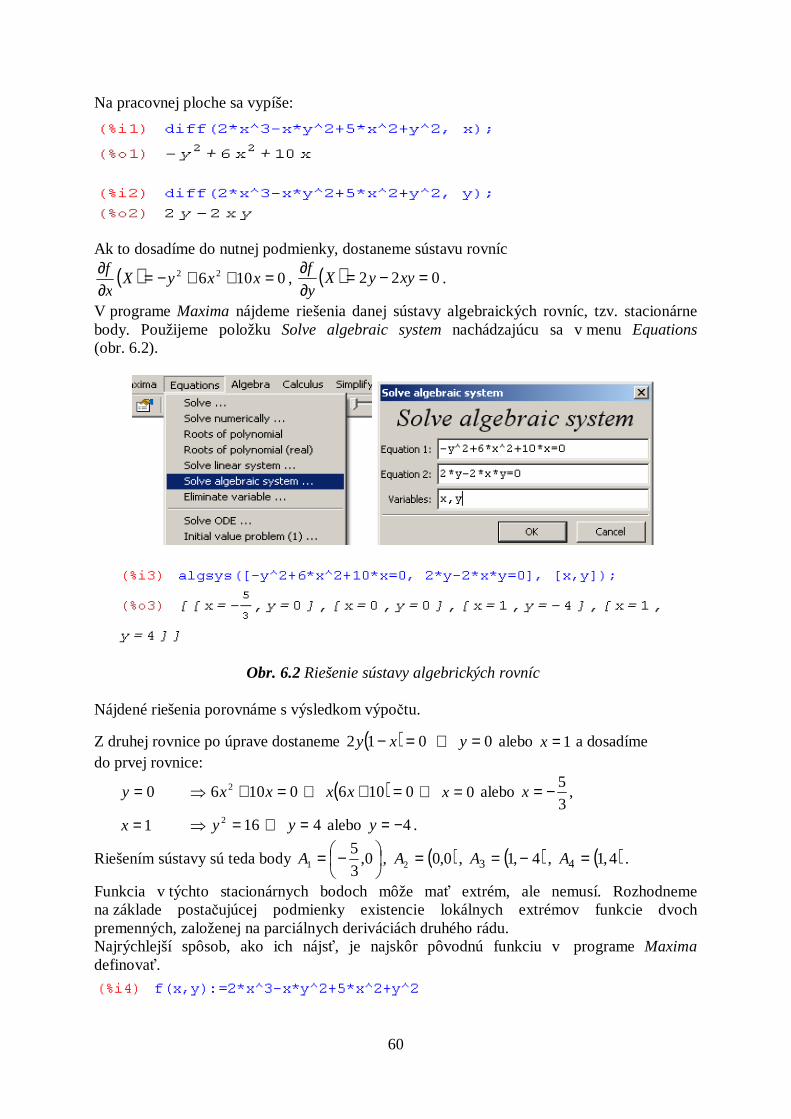
60
Na pracovnej ploche sa vypíše:
Ak to dosadíme do nutnej podmienky, dostaneme sústavu rovníc
( ) 0106 22 =++−=∂∂
xxyXx
f, ( ) 022 =−=
∂∂
xyyXy
f.
V programe Maxima nájdeme riešenia danej sústavy algebraických rovníc, tzv. stacionárne body. Použijeme položku Solve algebraic system nachádzajúcu sa v menu Equations (obr. 6.2).
Obr. 6.2 Riešenie sústavy algebrických rovníc Nájdené riešenia porovnáme s výsledkom výpočtu.
Z druhej rovnice po úprave dostaneme ( ) 012 =− xy ⇔ 0=y alebo 1=x a dosadíme do prvej rovnice:
0=y ⇒ 0106 2 =+ xx ⇔ ( ) 0106 =+xx ⇔ 0=x alebo 3
5−=x ,
1=x ⇒ 162 =y ⇔ 4=y alebo 4−=y .
Riešením sústavy sú teda body
−= 0,3
51A , ( )0,02 =A , ( )4,13 −=A , ( )4,14 =A .
Funkcia v týchto stacionárnych bodoch môže mať extrém, ale nemusí. Rozhodneme na základe postačujúcej podmienky existencie lokálnych extrémov funkcie dvoch premenných, založenej na parciálnych deriváciách druhého rádu. Najrýchlejší spôsob, ako ich nájsť, je najskôr pôvodnú funkciu v programe Maxima definovať.

61
Následne v programe Maxima vytvoríme maticu typu 2 x 2, ktorej prvky predstavujú príslušné parciálne derivácie druhého rádu funkcie f, zadávame v tvare diff (funkcia, premenná, rád derivácie). K príkazu matrix sa prepracujeme cez položku Enter Matrix v menu Algebra (obr. 6.3).
Obr. 6.3 Zadávanie matice
Nájdené parciálne derivácie druhého rádu funkcie overíme výpočtom:
( ) 1012106 222
2
+=++−∂∂=
∂∂
∂∂=
∂∂
xxxyxx
f
xx
f,
( ) xxyyyy
f
yy
f2222
2
2
−=−∂∂=
∂∂
∂∂=
∂∂
,
( ) yxxyyx
f
yyx
f2106 22
2
−=++−∂∂=
∂∂
∂∂=
∂∂∂
.
Po kliknutí na maticu vo výstupnom riadku (%o5) použijeme v menu Algebra položku Determinant. Program Maxima vypíše determinant zadanej matice.
Ostáva nám už iba rozhodnúť, pre ktorý zo štyroch stacionárnych bodov je splnená postačujúca podmienka existencie lokálnych extrémov, t.j. pre ktorý stacionárny bod
je splnená podmienka 04)1012)(22( 2 >−+− yxx .
Najprv preskúmajme bod
−= 0,3
51A . Hodnotu determinantu v bode 1A môžeme
vypočítať pomocou príkazu subst.
Výsledok porovnáme s výsledkom výpočtu:
( )3
1600.410
3
5.12
3
5.22 2
1 −=−
+
−
−−=AD .
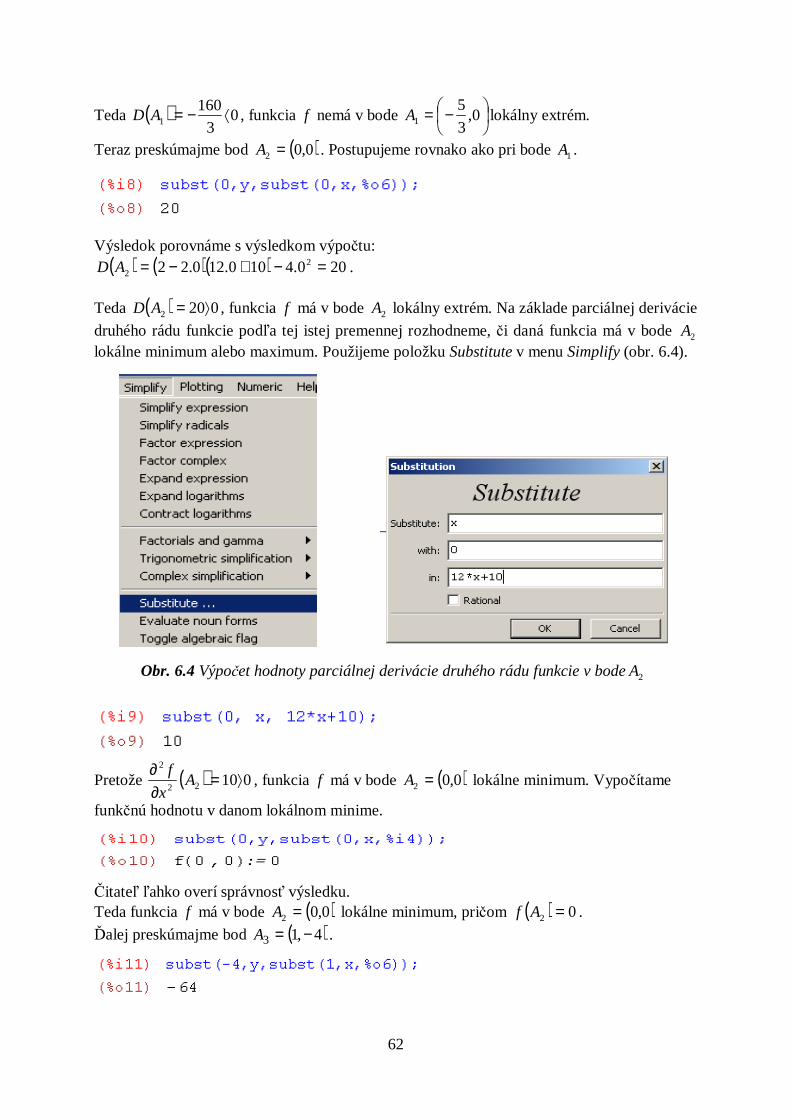
62
Teda ( ) 03
1601 ⟨−=AD , funkcia f nemá v bode
−= 0,3
51A lokálny extrém.
Teraz preskúmajme bod ( )0,02 =A . Postupujeme rovnako ako pri bode 1A .
Výsledok porovnáme s výsledkom výpočtu:
( ) ( )( ) 200.4100.120.22 22 =−+−=AD .
Teda ( ) 0202 ⟩=AD , funkcia f má v bode 2A lokálny extrém. Na základe parciálnej derivácie
druhého rádu funkcie podľa tej istej premennej rozhodneme, či daná funkcia má v bode 2A lokálne minimum alebo maximum. Použijeme položku Substitute v menu Simplify (obr. 6.4).
Obr. 6.4 Výpočet hodnoty parciálnej derivácie druhého rádu funkcie v bode 2A
Pretože ( ) 01022
2
⟩=∂∂
Ax
f, funkcia f má v bode ( )0,02 =A lokálne minimum. Vypočítame
funkčnú hodnotu v danom lokálnom minime.
Čitateľ ľahko overí správnosť výsledku. Teda funkcia f má v bode ( )0,02 =A lokálne minimum, pričom ( ) 02 =Af .
Ďalej preskúmajme bod ( )4,13 −=A .

63
Výsledok porovnáme s výsledkom výpočtu:
( ) ( )( ) ( ) 644.4101.121.22 23 −=−−+−=AD .
Teda ( ) 0643 ⟨−=AD , funkcia f nemá v bode 3A lokálny extrém.
Nakoniec pomocou postačujúcej podmienky preskúmajme bod ( )4,14 =A .
Výsledok porovnáme s výsledkom výpočtu: ( ) ( )( ) 644.4101.121.22 2
4 −=−+−=AD .
Teda ( ) 0644 <−=AD , funkcia f nemá v bode 4A lokálny extrém.
V programe WinPlot zobrazme graf danej plochy a lokálne minimum funkcie (obr. 6.5): .
Obr. 6.5 Graf plochy 2223 52),( yxxyxyxf ++−= a lokálne minimum v bode2A
Príklad 2. Nájdite lokálne extrémy funkcie ( )yx
xyyxf2050
, ++= , ( )0,0 >> yx . Porovnajte
čiastočné výsledky výpočtu využitím programu Maxima. Riešenie: Funkcia je diferencovateľná v každom bode definičného oboru a podľa nutnej
podmienky lokálnych extrémov musí platiť ( ) 0=∂∂
Ax
f, ( ) 0=
∂∂
Ay
f.
Najskôr nájdeme parciálne derivácie prvého rádu:
( )2
50
xyX
x
f−=
∂∂
, ( )2
20
yxX
y
f −=∂∂
.
Výsledok porovnáme s výpočtom parciálnych derivácií v programe Maxima.

64
Po dosadení do nutnej podmienky existencie lokálnych extrémov dostaneme sústavu rovníc :
050
2=−
xy , 0
202
=−y
x .
Z prvej rovnice dostaneme 2
50
xy = , dosadíme do druhej rovnice:
050
202
2
=
−
x
x ⇒
4
250020
x
x = ⇒125
4xx = ⇒ 4125 xx = ⇒ 01254 =− xx ⇒ ( ) 01253 =−xx ⇒
⇒ 01253 =−x ⇒ 5=x . Koreň 0=x nepatrí do definičného oboru, preto ho medzi riešeniami rovnice neuvádzame.
Z rovnosti 2
50
xy = vypočítame y – ovú súradnicu stacionárneho bodu. Teda 2
5
502
==y .
Máme jeden stacionárny bod ( )2,5=A . Riešenie sústavy rovníc v programe Maxima:
Z trojice stacionárnych bodov, ktoré určil program Maxima, je iba jeden reálny koreň. Teraz pomocou postačujúcej podmienky lokálnych extrémov preskúmame bod ( )2,5=A a rozhodneme, či funkcia má v bode A lokálny extrém. Najskôr nájdeme parciálne derivácie druhého rádu:
( )3
322
2 1002.50
50
xx
xy
xx
f
xx
f =−−=
−∂∂=
∂∂
∂∂=
∂∂ − ,
( )3
322
2 402.20
20
yy
yx
yy
f
yy
f =−−=
−
∂∂=
∂∂
∂∂=
∂∂ − ,
150
2
2
=
−∂∂=
∂∂
∂∂=
∂∂∂
xy
yx
f
yyx
f.
Výsledky overíme v programe Maxima:

65
Teraz vypočítame príslušný determinant matice:
( ) 03155
41
2
40
5
10033
>=−⋅=−⋅=AD .
Postačujúca podmienka lokálnych extrémov funkcie dvoch premenných je splnená, teda funkcia f má v bode A lokálny extrém.
Pretože ( ) 05
10032
2
>=∂∂
Ax
f, funkcia má v bode ( )2,5=A lokálne minimum, pričom
( ) 302
20
5
502.5 =++=Af .
Výpočet determinantu matice v programe Maxima (obr. 6.6):
Obr. 6.6 Zadanie matice
( ) ( )
( ) ( )( ) ( ) ( )
,140100
,
,2
33
22
2
2
2
2
2
22
2
2
2
−⋅=
∂∂∂−
∂∂⋅
∂∂=
∂∂
∂∂∂
∂∂∂
∂∂
=yxyx
Af
y
Af
x
Af
y
Af
yx
Afyx
Af
x
Af
D

66
Po kliknutí na maticu vo výstupnom riadku (%o7) použijeme v menu Algebra položku Determinant. Program Maxima vypíše determinant zadanej matice.
Hodnotu determinantu v bode A vypočítame pomocou príkazu subst.
Nakoniec overíme aj funkčnú hodnotu v lokálnom minime.
Príklad 3. Využitím programu Maxima nájdite lokálne extrémy funkcie
( ) 322, 22 +−++= yyxxyxf pri väzbe 0822 =−+ yx . Riešenie: Úlohou je nájsť lokálne extrémy funkcie f na množine tých funkčných hodnôt funkcie f, pre ktoré 0822 =−+ yx . Úlohu budeme riešiť metódou Lagrangeových multiplikátorov. Vytvoríme tzv. Lagrangeovu funkciu
( ) ( ) ( ) ( )8322,,, 2222 −+++−++=+= yxyyxxyxgyxfyxF λλ . V programe Maxima postupne zadefinujeme funkcie f, g a F.
Hľadajme lokálne extrémy tejto funkcie. Jej extrémy musia spĺňať nutnú podmienku
lokálnych extrémov 0=∂∂
x
F, 0=
∂∂
y
Fa navyše väzbovú podmienku 0822 =−+ yx .
Využitím programu Maxima najprv nájdeme parciálne derivácie prvého rádu funkcie F podľa jednotlivých premenných (obr. 6.7).
Obr. 6.7 Zadávanie parciálnej derivácie Lagrangeovej funkcie

67
Nájdeme stacionárne body, ktoré spĺňajú väzbovú podmienku. To sú body, ktorých súradnice vyhovujú rovniciam:
.08
,0222
,0222
22 =−+
=−+=++
yx
yy
xx
λλ
V programe Maxima nájdeme riešenia danej sústavy algebrických rovníc (obr. 6.8)
Obr. 6.8 Riešenie sústavy algebrických rovníc s troma neznámymi
Nájdené riešenia porovnáme s výsledkom výpočtu: Z prvej rovnice systému vyjadríme x, z druhej y a dosadíme do tretej rovnice:
222 −=+ xxλ ⇒ ( ) 212 −=+ λx ⇒ λ+
−=1
1x ,
222 =+ yyλ ⇒ λ+
=1
1y ,
81
1
1
122
=
+
+
+
−λλ
⇒ ( )
81
22
=+ λ
⇒ ( )4
11 2 =+ λ ⇒
2
11 =+ λ ⇒
2
31 −=λ ,
2
12 −=λ .
K hodnote 2
31 −=λ prislúcha 2
2
31
1
1
1
11 =
−−=
+−=
λx , 2
2
31
1
1
1
11 −=
−=
+=
λy .
K hodnote 2
12 −=λ prislúcha 2
2
11
1
1
1
22 −=
−−=
+−=
λx , 2
2
11
1
1
1
22 =
−=
+=
λy .

68
Tento systém troch rovníc má dve riešenia. Teda funkcia F má dva stacionárne body ( )2,21 −=A a ( )2,22 −=A .
Na základe postačujúcej podmienky lokálnych extrémov rozhodneme, či funkcia F má extrém v týchto stacionárnych bodoch. V programe Maxima vytvoríme maticu, ktorej prvky predstavujú parciálne derivácie druhého rádu funkcie F (obr. 6.9).
Obr. 6.9 Zadávanie postačujúcej podmienky lokálnych extrémov
V programe Maxima nájdeme determinant danej matice pomocou príkazu determinant.
Platí ( ) 022 2⟩+λ , teda postačujúca podmienka lokálnych extrémov funkcie dvoch
premenných je splnená, a tak funkcia F má v bodoch 1A , 2A lokálny extrém.
Uvažujme o bode 1A .
Pretože ( ) 0122
3.222 112
2
⟨−=+
−=+=∂∂ λA
x
F, funkcia F má v bode ( )2,21 −=A lokálne
maximum, a teda funkcia f má v bode 1A viazané lokálne maximum,
( ) ( ) ( ) 1932.222.22 221 =+−−−++=Af .
Nakoniec uvažujme o bode 2A .

69
Pretože ( ) 0122
1.222 222
2
⟩=+
−=+=∂∂ λA
x
F, funkcia F má v bode ( )2,22 −=A lokálne
minimum, a teda funkcia f má v bode 2A viazané lokálne minimum,
( ) ( ) ( ) 332.222.22 222 =+−+−+−=Af .
V programe WinPlot zobrazme graf plochy ( ) 322, 22 +−++= yyxxyxf , väzbovú
podmienku 0822 =−+ yx (valcová plocha) a nájdené viazané lokálne extrémy funkcie (obr. 6.10):
Obr. 6.10 Graf danej plochy a viazané lokálne extrémy Aplikácie 1. Každá úloha matematického programovania je zostavená s cieľom zobraziť nejakú ekonomickú situáciu, v ktorej ide o nájdenie najlepšieho riešenia pri určitých ohraničujúcich predpokladoch. Ciele sa v úlohách matematického programovania vyjadrujú prostredníctvom optimalizačných kritérií. Na úrovni výrobného podniku sa najčastejšie používajú nasledujúce kritériá: maximalizácia množstva vyrobenej produkcie, maximalizácia zisku, minimalizácia celkových nákladov, maximalizácia produktivity práce, minimalizácia odpadu z produkcie a iné druhy optimalizačných kritérií. Ohraničujúce podmienky opisujú fungovanie skúmaného systému, podmienky, za ktorých sa skúmaný proces realizuje, prvky systému, väzby medzi nimi a väzby systému s okolím. Na úrovni výrobného podniku sa najčastejšie vyskytujú ohraničenia materiálové, technologické, finančné, dopravné a iné (5).

70
Reálne funkcie viacerých premenných ( ) ( ) ( )nknn xxxfxxxfxxxf ,...,,,...,,...,,,,...,, 21212211
nazývame účelové funkcie a opisujú ciele optimalizácie. Reálne funkcie viacerých premenných
( ) ( ) ( ) 0,...,,,...,0,...,,,0,...,, 21212211 ≥≥≥ nmnn xxxgxxxgxxxg nazývame štruktúrne
podmienky rozhodnutia a opisujú ohraničujúce podmienky. Hľadané extrémne hodnoty sa vyjadrujú pomocou rozhodovacích premenných
njx j ,...,2,1, = .
Podľa typu účelových funkcií a štruktúrnych podmienok rozhodnutia možno tieto úlohy matematického programovania rozdeliť na úlohy lineárneho programovania a úlohy nelineárneho programovania. Základ riešenia úloh lineárneho programovania je postavený na teórii duality, ktorá úzko súvisí s metódou hľadania viazaných extrémov pomocou Lagrangeových multiplikátorov. 2. V štatistike jednou zo základných metód bodového odhadu parametrov základného súboru je metóda najväčšej vierohodnosti. Nech je známe rozdelenie pravdepodobnosti náhodnej veličiny X v základnom súbore
( )pQQQxf ,...,,, 21 . Pri odhade parametrov piQi ,...,2,1, = rozdelenia pravdepodobnosti
vychádzame z hodnôt znaku vo výberovom súbore njx j ,...,2,1, = . Vytvoríme funkciu L -
funkciu vierohodnosti, pre ktorú platí ( )∑=
=n
jpj QQQxfL
121 ,...,,, a je pravdepodobnosťou
toho, že z výberového súboru s rozsahom n jednotiek dostaneme práve tie hodnoty jx , ktoré
sa skutočne zistili pri vybratých jednotkách (7). Na odhad parametrov iQ použijeme také charakteristiky, pre ktoré dosiahne funkcia L
maximálnu hodnotu. Odhady dostaneme z nutnej podmienky existencie lokálnych extrémov
riešením systému p rovníc: 0=∂∂
iQ
L, pi ,...,2,1= .
3. V stacionárnom stave pohyb harmonického oscilátora opisuje Schrödingerova rovnica
Euuxvdx
udh =+− 2222
22
22
µπµ
, kde ( )xuu = a E predstavuje diskrétne hodnoty energie
oscilátora. Jeden zo stacionárnych stavov Schrödingerovej rovnice má najnižšiu energiu
diskrétneho spektra energií. Pre tento stav možno písať 20
22200 22/ xvpE µπµ += ,
kde 20p a 2
0x sú stredné hodnoty štvorcov minimálnych hodnôt impulzu a polohy
vyhovujúce Heisenbergovmu vzťahu neurčitosti. Vzťah neurčitosti možno vyjadriť v tvare 2/00 hxp = .
Minimalizáciou základného stavu systému 0E pri vedľajšej podmienke 2/00 hxp = podľa
metódy Lagrangeových multiplikátorov dostaneme:
( ) 000
0000
0 =+=∂∂+
∂∂
xp
xppp
E λµ
λ ,
( ) 04 0022
0000
0 =+=∂∂+
∂∂
pxvxpxx
E λµπλ .
Eliminovaním Lagrangeovho multiplikátora λ z uvedeného systému rovníc dostaneme:
( ) 20
220 2 xvp πµ= .

71
Vzhľadom na vedľajšiu podmienku ďalej dostaneme:
( ) hxv =2022 πµ ,
( )vhp πµ22 20 = .
Dosadením do základného stavu systému dostaneme minimálnu energiu harmonického oscilátora
( )( ) ( ) 24422
222
2 220
hvhvhv
v
hv
hvE =+=
+=
πµµπ
µπµ
.
Táto rovnica predstavuje energiu kvantovomechanického harmonického oscilátora pri nulovej
absolútnej teplote. Teda v najstabilnejšom stave energia oscilátora je o 2
hv väčšia od energie
klasického oscilátora (8).
4. Maxwellov rozdeľovací zákon má tvar( ) RT
Mv
evRT
MvP 222
3 2
24
−
=π
π .
Ak chceme odvodiť vzťah na výpočet najpravdepodobnejšej rýchlosti, ktorou sa pohybujú napr. molekuly kyslíka pri danej teplote, tak najpravdepodobnejšia hodnota rýchlosti zodpovedá maximu v Maxwellovom rozdeľovacom zákone (1). Pre extrém funkcie ( )vP musí
platiť ( )
0=∂
∂v
vP.
Teda 02
4 222
3 2
=∂
∂−
v
evRT
M RT
Mv
ππ
.
Po vypočítaní parciálnej derivácie získame rovnicu
02
422
4 22
3
222
3 22
=
+
−
−−RT
Mv
RT
Mv
eRT
Mv
RT
Mvev
RT
M
ππ
ππ .
Po úprave dostaneme
012
2
=+−RT
Mv.
Vzťah na výpočet najpravdepodobnejšej rýchlosti bude M
RTv
2= .
Pomocou parciálnej derivácie druhého rádu funkcie ( )2
2
v
vP
∂∂
by sme sa ľahko presvedčili,
že ide o maximum funkcie ( )vP . 5. Uvažujme o dvoch projektoch. Do prvého projektu investujeme x miliónov eur, do druhého projektu investujeme y miliónov eur. Nech odhad príjmov z oboch projektov je daný funkciou
( ) yxyxR 2, = . K dispozícii máme 12 miliónov eur. Ako stanoviť hodnoty x a y, aby sme dosiahli z projektov maximálny príjem?
Úlohou je nájsť viazané lokálne maximum funkcie ( ) yxyxR 2, = , ak je daná väzba 12=+ yx . Z väzby vyjadríme napr. premennú y a dosadíme do funkcie R:
xy −= 12 ⇒ ( ) ( ) 322 1212 xxxxxR −=−= .
Nájdeme lokálne extrémy funkcie ( )xR :

72
( ) 2324 xxxR −=′ , ( ) 0=′ xR ⇔ 0=x ∨ 8=x . Z ekonomického hľadiska stacionárny bod 0=x nemá zmysel. Overíme extrém v stacionárnom bode 8=x :
( ) xxR 624−=′′ ; ( ) 248 −=′′R < 0 ⇒ v bode 8=x je lokálne maximum. Z väzbovej podmienky dopočítame 412 =−= xy . Maximálny príjem dosiahneme, ak do prvého projektu investujeme 8 miliónov eur a do druhého projektu 4 milióny eur.
6. Čerpanie zásob tovaru až po stav, keď na sklade nie sú žiadne zásoby tovaru možno opísať intenzitou čerpania zásob λ . Množstvo zásob, ktoré by malo byť na sklade, nazývame deficit. Podobným spôsobom možno opísať napr. problém vo výrobnom podniku, keď deficit v zásobách spôsobuje prerušenie výroby. Tento výpadok možno následne preklenúť len za cenu zvýšených nákladov (5). Označme hodnotu deficitu premennou s a veľkosť zásob premennou Q. Potom vzťah na výpočet celkových nákladov s deficitom za určité obdobie vyjadruje funkcia ( )sQC , :
( ) ( )[ ]Q
cscsQccQ
sQC dspa 2
1, 22 ⋅+⋅−+⋅+⋅= λλ
, Qs ≤≤0 .
Na výpočet optimálnej veľkosti objednávky ∗Q s deficitom a na výpočet optimálnej veľkosti
deficitu ∗s určíme celkové variabilné náklady pomocou vzťahu
( ) ( )[ ]dsav cscsQQ
cQ
sQC ⋅+⋅−+⋅= 22
2
1,
λ.
Vypočítame parciálnu deriváciu funkcie ( )sQCv , podľa s a položíme ju rovnú nule:
( ) ( )[ ] 0222
1,=⋅+⋅−=
∂∂
dsv cscsQ
Qs
sQC.
Z poslednej rovnice vypočítame s, pre ktoré sú uvedené náklady minimálne:
ds
s
cc
cQs
+⋅
= .
Posledný vzťah dosadíme do vzťahu pre celkové variabilné náklady. Po úprave dostaneme vzťah na výpočet celkových variabilných nákladov v tvare:
( ) ( )ds
dsav cc
cQcc
QsQC
++⋅=
2,
λ .
Obdobne vypočítame parciálnu deriváciu funkcie ( )sQCv , podľa Q, a tiež ju položíme rovnú
nule: ( )
( ) 02
,2
=+
+−=∂
∂
ds
dsa
v
cc
ccc
sQC λ.
Úpravou uvedenej rovnice dostaneme vzťah na výpočet optimálnej veľkosti objednávky s deficitom:
( ) ( )ds
dsa
cc
cccsQ
+=∗ λ2
.
Podobne dosadením ∗Q do vzťahu pre s, pre ktoré sú náklady minimálne, dostaneme vzťah na výpočet optimálnej veľkosti deficitu:
( ) dds
sa
ccc
ccs
+=∗ λ2
.

73
Úlohy Nájdite lokálne extrémy funkcií, vhodne využite program Maxima. 1. ( ) yxyxyxyxf −−++= 2, 22 .
2. ( ) 23562, 22 ++−+−= yxyxyxyxf .
3. ( ) 23 3666, yyxyxxyxf ++−−= .
4. ( ) ( ) ( )22 324, +−−−= yxyxf .
5. ( ) 21518, 33 +−+= xyyxyxf .
6. ( ) 1532, 22 −+−−= yxyxyxf .
7. ( ) yxxyxyxf 12153, 23 −−+= .
8. ( ) xyyyxyxf 54691427, 32 −−+= .
9. ( ) 19, 23 −−+= xxyxyxf .
10. ( ) ,825
5,yx
xyyxf ++= ( )0,0 >> yx .
11. ( ) 221, yxxyyxf −−= .
Nájdite viazané lokálne extrémy funkcií, vhodne využite program Maxima. 12. ( ) 1, −+−= yxxyyxf , 1=+ yx .
13. ( ) 22, yxyxf += , 132
=+ yx.
14. ( )32
,yx
yxf += , 122 =+ yx .
15. ( ) yxyxf +=, , 0922 =−+ yx .
16. ( ) yxyxf +=, , 222
111
ayx=+ .
17. ( ) 32, 22 −+= yxyxf , 42 =+ xy . 18. Dieťa dostalo od starých rodičov 20 eur na jarmočné radovánky. Jedna jazda na kolotoči stojí 2 eurá, jedna porcia sladkostí 2,5 eura. Radosť z kolotočov sa popíše funkciou r = 4j, kde
j je počet jázd, a radosť zo sladkostí možno popísať funkciou r = 3
35
+s
s, kde s je počet
zjedených sladkostí. Ako má dieťa peniaze minúť, aby malo z jarmoku maximálnu radosť?
Riešenia
1. V bode (1, 0) je lokálne minimum ( ) 10,1 −=f . 2. V bode
−−2
3,2 je lokálne minimum
4
3
2
3,2 =
−−f . 3. V bode (2, 1) je lokálne minimum ( ) 71,2 −=f . 4. V bode (2, – 3) je
lokálne maximum ( ) 43,2 =−f . 5. V bode (6, 6) je lokálne minimum ( ) 16,6 −=f . 6. Nemá
extrémy. 7. V bode (2, 1) je lokálne minimum ( ) 281,2 −=f , v bode (– 2, – 1) je lokálne
maximum ( ) 281,2 =−−f . 8. V bode (1, 1) je lokálne minimum ( ) 821,1 −=f ,

74
v bode (– 1, – 1) je lokálne maximum ( ) 821,1 =−−f . 9. V bode ( )0,3 je lokálne minimum
( ) 1360,3 −−=f , v bode ( )0,3− je lokálne maximum ( ) 1360,3 −=−f . 10. V bode
5
4,
2
5 je lokálne minimum 30
5
4,
2
5 =
f . 11. V bodoch ,
3
1,
3
1
−−
3
1,
3
1je
lokálne maximum 3
1
3
1,
3
1
3
1,
3
1 =
−−=
ff , v bodoch
−
3
1,
3
1,
−
3
1,
3
1je lokálne minimum
3
1
3
1,
3
1
3
1,
3
1 −=
−=
− ff . 12. V bode
−2
3,
2
1 je viazané lokálne maximum
4
1
2
3,
2
1 =
−f . 13. V bode
13
12,
13
18 je viazané
lokálne minimum 13
36
13
12,
13
18 =
f . 14. V bode
13
2,
13
3 je viazané lokálne maximum
6
13
13
2,
13
3 =
f , v bode
−−
13
2,
13
3 je viazané lokálne minimum
6
13
13
2,
13
3 −=
−−f . 15. V bode
2
3,
2
3 je viazané lokálne maximum
232
3,
2
3 =
f , v bode
−−2
3,
2
3 je viazané lokálne minimum
232
3,
2
3 −=
−−f . 16. V bode ( )2,2 aa je viazané lokálne minimum
( ) 222,2 aaaf = , v bode ( )2,2 aa −− je viazané lokálne maximum
( ) 222,2 aaaf −=−− . 17. V bode
3
4,
3
4 je viazané lokálne minimum
3
7
3
4,
3
4 =
f .
18. Najvýhodnejšie je peniaze minúť na 8 jázd a 1,6 porcií cukroviniek. Zoznam bibliografických odkazov 1. LABAŠ, V., MINÁRIK, S. Fyzika 1. Bratislava: Vydavateľstvo STU, 2002.
ISBN 80-227-1671-5. [cit. 2012-05-01]. Dostupné na internete: http://is.stuba.sk 2. MIŠÚTOVÁ, M. a kol. Matematika II s podporou programov Maxima a WinPlot. Trnava:
AlumniPress, 2010. ISBN 978-80-8096-127-5. [cit. 2012-06-01]. Dostupné na internete: http://is.stuba.sk
3. IVAN, Ján. Matematika 1. Bratislava: Alfa, 1986. 4. ELIAŠ, J., HORVÁTH, J. KAJAN, J. Zbierka úloh z vyššej matematiky 2. Bratislava:
STU, 1976. 5. BREZINA, I., IVANIČOVÁ, Z., PEKÁR, J. Operačná analýza. Bratislava: Iura Edition,
2007. ISBN 978-80-8078-176-7 6. KRAJČOVIČ, J. a kol. Fyzika II. Trnava: AlumniPress, 2007. ISBN 978-80-8096-003-2.
[cit. 2012-05-01]. Dostupné na internete: http://is.stuba.sk 7. BAKYTOVÁ, H. a kol. Základy štatistiky. Bratislava: Alfa, 1979. 8. LISÝ, J. M., VALKO, L. Príklady a úlohy z fyzikálnej chémie. Bratislava: Alfa, 1979. 9. GRINČOVÁ, Anna. Matematika II a jej využitie v ekonómii. Košice: Technická univerzita
v Košiciach, 2012. ISBN 978-80-553-0851-7

75
7 GLOBÁLNE EXTRÉMY FUNKCIE DVOCH PREMENNÝCH
Riešené úlohy Príklad 1. Vypočítajte globálne (absolútne) extrémy funkcie f(x, y) = – x2 – y2 + 6x – 12y na oblasti M danej nerovnosťou x2 + y2 ≤ 16. V programe WinPlot zobrazte graf danej plochy a na nej maximum a minimum funkcie na množine M. Riešenie: Pri výpočte extremálnych hodnôt funkcie na danej množine hľadáme: 1. lokálne extrémy vnútri množiny M, 2EM ⊂ – v stacionárnych bodoch, príp. v bodoch, v ktorých funkcia nie je diferencovateľná, 2. viazané lokálne extrémy na hranici množiny M. Globálnym maximom (minimom) je najväčšie (najmenšie) z lokálnych a viazaných lokálnych maxím (miním). Množina M je kruh s polomerom 4 so stredom v začiatku súradnicovej sústavy v rovine xy. 1. Vyšetrovanie lokálnych extrémov vo vnútri množiny M.
Riešením sústavy f´x = – 2x + 6 = 0, f´y = – 2y – 12 = 0
je stacionárny bod (3, – 6).
Tento bod nie je bodom množiny M (neleží v kruhu – pozri obr. 7.1). Keďže funkcia f(x, y) je diferencovateľná na celej množine R x R, lokálny extrém sa v inom ako stacionárnom bode vyskytovať nemôže. Vnútri M funkcia lokálne extrémy nemá. 2. Vyšetrovanie viazaných lokálnych extrémov na hranici množiny M. Túto podúlohu môžeme riešiť napr. pomocou Lagrangeovej funkcie L(x, y) = – x2 – y2 + 6x – – 12y + λ(x2 + y2 – 16).
Riešením systému L´x = – 2x + 6 + 2xλ = 0, L´y = – 2y – 12 + 2yλ = 0,
x2 + y2 – 16 = 0 sú dve trojice hodnôt:
x1 = – 54 , y1 = 58 , λ1 = 1 + 453 ,
x2 = 54 , y2 = – 58 , λ2 = 1 – 453 .
Na hraničnej kružnici sa teda nachádzajú 2 stacionárne body (x1, y1) = (– 54 , 58 ),
(x2, y2) = ( 54 , – 58 ) – obr. 7.2.
Obr. 7.1 Bod (3, – 6, 0) neleží v kruhu M
Obr. 7.2 Body (x1, y1), (x2, y2) sú z hranice množiny M

76
Vyšetríme ich kvalitu. xxL ′′ = – 2 + 2λ, yyL ′′ = – 2 + 2λ, xyL ′′ = 0, hessián H(x, y, λ) =
= xxL ′′ . yyL ′′ – ( xyL ′′ )2 = (– 2 + 2λ)2 > 0. V oboch stacionárnych bodoch teda viazané lokálne
extrémy existujú:
xxL ′′ (λ1) = 253 > 0, v (x1, y1) má funkcia f(x, y) lokálne minimum s funkčnou hodnotou
f(x1, y1) = – (– 54 )2 – ( 58 )2 + 6(– 54 ) – 12 ( 58 ) = – 16 – 5120 ,
xxL ′′ (λ2) = – 253 < 0, v (x2, y2) má funkcia f(x, y) lokálne maximum s funkčnou hodnotou
f(x2, y2) = – ( 54 )2 – (– 58 )2 + 6( 54 ) – 12 (– 58 ) = – 16 + 5120 .
Obr. 7.3 Vstupné údaje a graf explicitne danej funkcie f(x, y) = – x2 – y2 + 6x – 12y pre zvolené intervaly hodnôt premenných x a y
Obr. 7.4 Pridaný graf parametricky danej rotačnej valcovej plochy (s polomerom 4 a s osou v osi z), ktorej priesečnica s rovinou xy (kružnica) je hranicou kruhovej
množiny M

77
Na priesečnici oboch plôch sa nachádzajú viazané lokálne extrémy. Sú znázornené bielou farbou. (Čiernou je vyznačený ten bod na grafe plochy, v ktorom sa vyskytuje lokálny extrém (lokálne maximum) funkcie, avšak tu je irelevantný, pretože neodpovedá množine M).
Obr. 7.5 Vstupné údaje na zobrazenie bodov v karteziánskej súradnicovej sústave
Lokálne extrémy na množine M funkcia nemá. Preto viazané lokálne extrémy sú zároveň
globálnymi. Funkcia má globálne minimum v bode (x1, y1) = = (– 54 , 58 ) s funkčnou
hodnotou f(x1, y1) = – 16 – 5120 a globálne maximum v bode (x2, y2) = ( 54 , – 58 ),
f(x2, y2) = – 16 + 5120 .
Obr. 7.6 Dva pohľady na tú istú scénu Príklad 2. Nájdite najmenšiu a najväčšiu hodnotu funkcie f(x, y) = 2x2 + y2 na množine M danej nerovnosťami: x2 + (y – 1)2 ≤ 4, y ≤ 1. Riešenie: Najskôr si nakreslíme množinu (oblasť) M (obr. 7. 7). Jej hranicu tvoria: časť krivky k: x2 + (y – 1)2 = 4, t.j. kružnice so stredom v bode (0, 1) a polomerom 2, časť priamky p: y = 1, t.j. rovnobežky s osou x, ktorá prechádza bodom (0,1). Ďalej zistíme, či existujú lokálne extrémy vo vnútri množiny M.
( ) ( )0002042,4 =∧=⇔=∧=→=∂∂=
∂∂
yxyxyy
fx
x
f. Jediný lokálny extrém

78
x
y
y=1 1
0 A
B
C D
P E Q
môže funkcia f nadobúdať v stacionárnom bode A = (0, 0). Keďže A leží vo vnútri množiny M, tento bod zaradíme medzi tzv. „podozrivé body“ (body, v ktorých môže funkcia nadobudnúť globálny extrém).
Obr. 7.7 Množina M a body, v ktorých môže funkcia nadobudnúť globálny extrém
Teraz sa zameriame na hranicu oblasti M: 1. časť hranice je polkružnica, ktorú je možné analyticky vyjadriť v tvare:
14 2 +−−= xy , ( )2,2−∈x .
Potom pre funkciu f s touto väzbou platí ( ) ( )222 142, +−−+= xxyxf . Odtiaľ:
( ) ( ) ( ) ( )2
2
2
122
4
14224
2
11424
x
xxxxxxf
−
+−=
−−−+−−+=′ −. Vyriešením rovnice
0=′f , čiže ( )
04
1422
2
=−
+−
x
xx, dostaneme tri hodnoty x: 3,3,0 321 −=== xxx .
Funkcia f teda môže pri danej väzbe6 nadobudnúť extrémy v bodoch ( )1,0 −=B ,
( )0,3=C , ( )0,3−=D . Všetky tri body ležia na hraničnej polkružnici (pozri obr. 7.7), patria teda tiež medzi body, v ktorých môže funkcia nadobudnúť globálny extrém na množine M.
2. časť hranice je úsečka PQ s analytickým vyjadrením: y = 1, ( )2,2−∈x . Pre funkciu f
s touto väzbou následne platí: ( ) 12, 2 += xyxf . Vyriešením rovnice 0=′f , čiže ,04 =x dostaneme jedinú hodnotu x, a to x = 0. Funkcia f teda môže pri danej väzbe nadobudnúť extrém len v bode ( )1,0=E (pozri obr. 7.7).
Keďže hranica nie je hladká čiara, medzi podozrivé body zaradíme aj body( )1,2−=P
a ( ).1,2=Q Na záver vypočítame funkčné hodnoty vo všetkých podozrivých bodoch: A = (0, 0) ( ) 00,0 =→ f → minimálna hodnota
( )1,0 −=B ( ) 11,0 =−→ f
( )0,3=C ( ) 60,3 =→ f
( )0,3−=D ( ) 60,3 =−→ f
( )1,0=E ( ) 11,0 =→ f
( )1,2−=P ( ) 91,2 =−→ f
→ maximálna hodnota ( )1,2=Q ( ) 91,2 =→ f
6 Pri hľadaní viazaných extrémov funkcie f môžeme použiť aj Lagrangeovu funkciu: L(x, y) = 2x2 + y2 + λ(x2 + + (y – 1)2 – 4).

79
Funkcia f(x, y) = 2x2 + y2 má na danej množine M najmenšiu hodnotu 0, ktorú nadobúda v bode (0, 0) a najväčšiu hodnotu 9, ktorú nadobúda v bodoch (– 2, 1) a (2, 1). Na záver si môžeme celú situáciu vizualizovať pomocou programu WinPlot.
Obr. 7.8 Funkcia ( ) 222, yxyxf += a jej globálne extrémy na množine M Aplikácie 1. V praxi sa často stretávame s úlohou prognózovať určitú veličinu, pre ktorú už boli zaznamenané (alebo namerané) konkrétne hodnoty za isté časové obdobie. Jednou z metód, ako takúto úlohu riešiť, je tzv. lineárna regresia. Cieľom tejto metódy je nájsť rovnicu priamky, ktorá prechádza pomedzi hodnoty množiny historických dát tak, že minimalizuje sumu štvorcov vertikálnych odchýlok bodov, ktoré reprezentujú hodnoty danej veličiny, od nájdenej priamky (1). Ak označíme hodnoty prognózovanej veličiny v bodoch ( ) ( ) ( )nn xfxfxfxxx ,...,:,...,, 2121
a hľadanú regresnú priamku vyjadríme v tvare y = a + bx, potom minimalizovať sumu štvorcov vertikálnych odchýlok znamená nájsť minimum funkcie:
( ) ( ) ( )( )∑=
+−=n
iii bxaxfbaR
1
2, . Funkcia R je funkciou dvoch premenných a a b. Minimum
môže nadobudnúť len v stacionárnom bode. Z tejto podmienky dostaneme sústavu dvoch rovníc s neznámymi a a b:
( ) ( )( )
( ) ( )( ) .02
,02
1
1
=+−−=∂∂
=+−−=∂∂
∑
∑
=
=
i
n
iii
n
iii
xbxaxfb
R
bxaxfa
R
Odtiaľ po úprave:
( )
( ) .
,
1
2
11
11
i
n
iii
n
ii
n
i
n
ii
n
ii
xxfxbxa
xfbxna
∑∑∑
∑∑
===
==
=+
=+ [1]
Táto metóda hľadania hodnôt a a b sa nazýva metóda najmenších štvorcov.
Nižšie sú uvedené konkrétne príklady uplatnenia lineárnej regresie v praxi: a) Určte výšku objednávky na 2. polrok roku 2003, keď sú známe spotreby materiálu v minulých piatich rokoch (2).
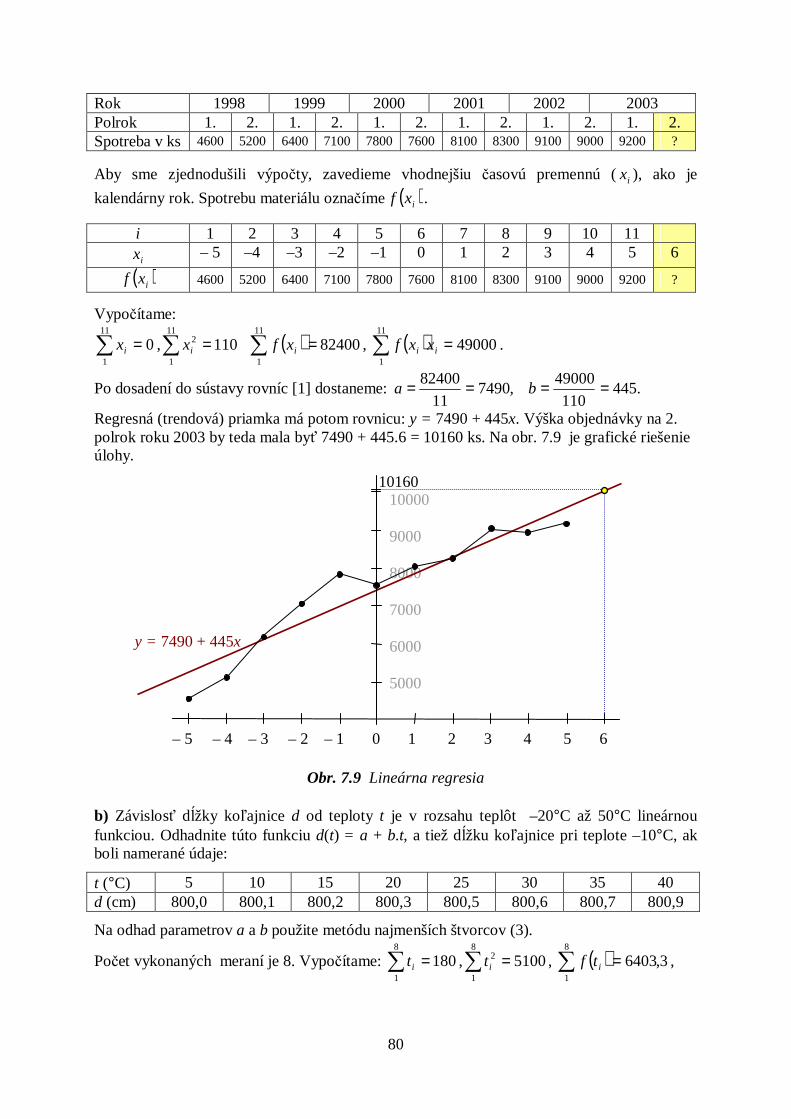
80
Rok 1998 1999 2000 2001 2002 2003 Polrok 1. 2. 1. 2. 1. 2. 1. 2. 1. 2. 1. 2. Spotreba v ks 4600 5200 6400 7100 7800 7600 8100 8300 9100 9000 9200 ?
Aby sme zjednodušili výpočty, zavedieme vhodnejšiu časovú premennú (ix ), ako je
kalendárny rok. Spotrebu materiálu označíme ( )ixf .
i 1 2 3 4 5 6 7 8 9 10 11
ix – 5 –4 –3 –2 –1 0 1 2 3 4 5 6
( )ixf 4600 5200 6400 7100 7800 7600 8100 8300 9100 9000 9200 ?
Vypočítame:
∑ =11
1
0ix ,∑ =11
1
2 110ix ( )∑ =11
1
82400ixf , ( )∑ =11
1
49000ii xxf .
Po dosadení do sústavy rovníc [1] dostaneme: .445110
49000,7490
11
82400 ==== ba
Regresná (trendová) priamka má potom rovnicu: y = 7490 + 445x. Výška objednávky na 2. polrok roku 2003 by teda mala byť 7490 + 445.6 = 10160 ks. Na obr. 7.9 je grafické riešenie úlohy.
Obr. 7.9 Lineárna regresia b) Závislosť dĺžky koľajnice d od teploty t je v rozsahu teplôt –20°C až 50°C lineárnou funkciou. Odhadnite túto funkciu d(t) = a + b.t, a tiež dĺžku koľajnice pri teplote –10°C, ak boli namerané údaje:
t (°C) 5 10 15 20 25 30 35 40 d (cm) 800,0 800,1 800,2 800,3 800,5 800,6 800,7 800,9
Na odhad parametrov a a b použite metódu najmenších štvorcov (3).
Počet vykonaných meraní je 8. Vypočítame: ∑ =8
1
180it ,∑ =8
1
2 5100it , ( )∑ =8
1
3,6403itf ,
– 5 – 4 – 3 – 2 – 1 0 1 2 3 4 5 6
10000 9000 8000 7000 6000 5000
10160
y = 7490 + 445x

81
( )∑ =8
1
144101ii ttf . S využitím rovníc [1] dostaneme odhady parametrov a a b: ,839,799≈a
.0255,0≈b Hľadanú lineárnu funkciu teda odhadneme formulou: d(t) = a + b.t ≈ 799,839 +
+ 0,0255t. Dĺžka koľajnice pri teplote –10°C bude približne 799,584.
2. V oblasti optimalizácie sa pomocou matematickej formulácie cieľa daného zadávateľom všeobecne dostávame k úlohe minimalizovať alebo maximalizovať danú funkciu f na množine M. Ak je funkcia f lineárna a zároveň je aj množina M daná systémom lineárnych nerovností, potom ide o tzv. úlohu lineárneho programovania (4). Majme napríklad účelovú funkciu ( ) 2121, xxxxf −= . Úlohou je minimalizovať f na množine
M: .0,0,4,623,22 21212121 ≥≥≤+≤+−≥+ xxxxxxxx Množina prípustných riešení je teda konvexný päťuholník s vrcholmi (1, 0), (4, 0), (2/5, 18/5), (0. 3), (0, 2). Takýto typ úlohy môžeme samozrejme riešiť tradičným spôsobom s využitím diferenciálneho počtu, avšak môžeme použiť aj jednoduché grafické riešenie. Keďže grafom funkcie
( ) 2121, xxxxf −= je rovina, vrstevnice7 sú priamky s analytickým vyjadrením
.,21 Rkkxx ∈=− Potom teda stačí nájsť vrstevnicu s najmenšou z-ovou súradnicou, ktorá
prechádza bodom množiny ( )( ) ( ) MxxxxfxxM ∈= 212121 ,,,,,~
(pozri obr. 7.10a ). Keď graf
funkcie f spolu s vrstevnicami a množinou M~
kolmo premietneme do roviny 21xx , obrazom
množiny M~
je päťuholník M a jednotlivé vrstevnice sa zobrazia do rovnobežných priamok. Úlohu teda graficky riešime zostrojovaním rovnobežiek kxx =− 21 pre k = 0, – 1, – 2, – 3,
– 3.2 priamo v rovine 21xx (obr. 7.10b ).
Obr. 7.10a Grafické riešenie úlohy v E3
Obr. 7.10b Grafické riešenie úlohy v rovine 21xx
7 Vrstevnica je čiara ležiaca na grafe plochy, pričom všetky body tejto čiary majú rovnakú z-ovú súradnicu.
x2
x1
M
x1− x2 = 0
x1− x2 = −1 x1− x2 = −2
x1− x2 = −3 x1− x2 = −3,2
z
x2
x1
x1− x2 = −3,2 x1− x2 = −3
x1− x2 = −2
x1− x2 = −1
x1− x2 = 0
f(x1, x2) = x1− x2
M~

82
Optimálne riešenie úlohy nastane pre 5/18ˆ,5/2ˆ 21 == xx , optimálna hodnota účelovej
funkcie je ( ) .2,35/185/2ˆ,ˆ 21 −=−=xxf
3. Všeobecne je možné aplikovať postupy hľadania globálnych extrémov v rôznych oblastiach praxe všade tam, kde vieme nájsť funkčnú závislosť sledovaného javu od určitých premenných, ktoré sú obmedzené nejakými podmienkami. Napríklad: Strojárenský podnik vyrába dva výrobky V1 a V2, pričom výrobná kapacita pre V1 je K1 a pre V2 je K2. Ak je možné nájsť funkčnú závislosť zisku podniku ( ( )
21, VV PPfzisk = )
v závislosti od počtu 21
, VV PP vyrobených kusov výrobkov V1 a V2, potom úloha maximalizácie
zisku podniku znamená nájsť globálne maximum funkcie ( )21
, VV PPfzisk = na množine
21 210,0 KPKP VV ≤≤≤≤ .
Úlohy Výpočtom získané informácie konfrontujte s grafickou reprezentáciou riešenia: do jedného obrázka zobrazte na PC a) graf funkcie f(x, y), b) priamkové valcové plochy s určujúcimi čiarami, ktoré sú hranicami množiny M a s tvoriacim vektorom v smere osi z, c) body plochy s extrémnymi funkčnými hodnotami. Na vizualizáciu použite napríklad program WinPlot.
1. Vypočítajte globálne extrémy funkcie f(x, y) = x2 – 2y2 + 4xy – 6x – 1 na množine M danej nerovnosťami: x ≥ 0, y ≥ 0, y ≤ – x + 3. 2. Nájdite najväčšiu a najmenšiu hodnotu funkcie f(x, y) = 4x2 – 3y2 + 2xy na štvorci ohraničenom čiarami x = 0, y = 0, x = 1, y = 1. 3. Vypočítajte absolútne extrémy funkcie z = x2 + y2 na uzavretej množine 0 ≤ x ≤ 3, 2 ≤ y ≤ 4, x + y ≤ 6. 4. Nájdite najväčšiu a najmenšiu hodnotu funkcie f(x, y) = 3x + y na danej uzavretej oblasti; oblasť M je kruh x2 + y2 ≤ 7.
5. f(x, y) = 322 yxe −− (3x2 + 2y2), M: x2 + y2 ≤ 4.
Riešenia 1. Globálne maximum je v bode (0, 0), fmax(0, 0) = – 1; globálne minimum je v bode (0, 3), fmin(0, 3) = – 19.
Obr. 7.11 Explicitné zadanie časti plochy f(x, y) v programe WinPlot

83
Obr. 7.12 Časti troch rovín zadané parametricky v programe WinPlot
Obr. 7.13 Vstupné údaje pre bod plochy s maximálnou funkčnou hodnotou (t. j. globálne maximum) a globálne minimum danej funkcie na množine M
Obr. 7.14 Dva pohľady na tú istú scénu, v ktorej je zobrazených všetkých šesť vyššie spomenutých geometrických prvkov: časť plochy f(x, y), časti troch rovín (ktoré sú kolmé na rovinu xy a pretínajú ju – odpovedajúco – v troch úsečkách, tvoriacich
hranicu množiny M) a dva body plochy s najväčšou a najmenšou funkčnou hodnotou (na množine M)

84
2. Najmenšia hodnota je v bode (0, 1), fmin(0, 1) = – 3; najväčšia hodnota je v bode (1, 1/3), fmax(1, 1/3) = 13/3.
Obr. 7.15 Grafická reprezentácia riešenia úlohy č.2 3. zmax = 20, x = 2, y = 4; zmin = 4, x = 0, y = 2.
Obr. 7.16 Grafická reprezentácia riešenia úlohy č.3
4. Maximum 5
145 je v bode
5
14
2
1,
5
14
2
3, minimum –
5
145 je v bode
−−
5
14
2
1,
5
14
2
3.
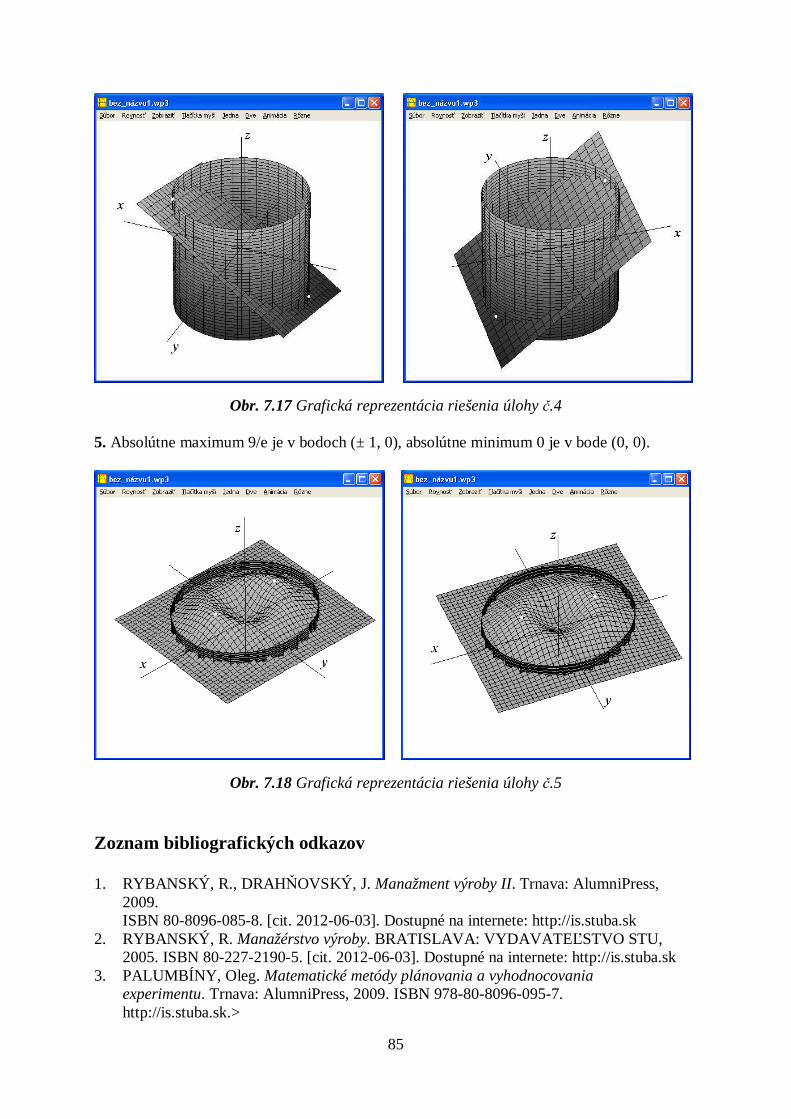
85
Obr. 7.17 Grafická reprezentácia riešenia úlohy č.4
5. Absolútne maximum 9/e je v bodoch (± 1, 0), absolútne minimum 0 je v bode (0, 0).
Obr. 7.18 Grafická reprezentácia riešenia úlohy č.5 Zoznam bibliografických odkazov 1. RYBANSKÝ, R., DRAHŇOVSKÝ, J. Manažment výroby II. Trnava: AlumniPress,
2009. ISBN 80-8096-085-8. [cit. 2012-06-03]. Dostupné na internete: http://is.stuba.sk
2. RYBANSKÝ, R. Manažérstvo výroby. BRATISLAVA: VYDAVATE ĽSTVO STU, 2005. ISBN 80-227-2190-5. [cit. 2012-06-03]. Dostupné na internete: http://is.stuba.sk
3. PALUMBÍNY, Oleg. Matematické metódy plánovania a vyhodnocovania experimentu. Trnava: AlumniPress, 2009. ISBN 978-80-8096-095-7. http://is.stuba.sk.>

86
4. DUPAČOVÁ, J., LACHOUT, P. Úvod do optimalizace. Praha: MatfyzPress, 2011. ISBN 978-80-7378-176-7.
5. MIŠÚTOVÁ, M. a kol. Matematika II s podporou programov Maxima a WinPlot. Trnava: AlumniPress, 2010. ISBN 978-80-8096-127-5. [cit. 2012-05-03]. Dostupné na internete: http://is.stuba.sk
6. IVAN, Ján. Matematika 2. Bratislava: Alfa, 1989. ISBN 80-05-00114-2. 7. ELIAŠ, J., HORVÁTH, J. KAJAN, J. Zbierka úloh z vyššej matematiky 3. Bratislava:
Alfa, 1980. 8. HERZIG, P., JAKUBETZ, G., ZIFFERER, G. Mathematische Übungen für
Lehramtskandidaten. Universität Wien, 2010. [cit. 2012-06-03]. Dostupné na internete: http://www.ricam.oeaw.ac.at/people/page/mueller/Einheiten/Math_II/Einheit_20.pdf

87
8 VEKTOROVÁ ANALÝZA 8
Slovo pole má mnohoraký význam. Označuje obrábanú časť chotára, v programovacích jazykoch vystupuje pole ako štruktúra dát (napr. (1)), a tiež je to matematický objekt, ktorý patrí do jazyka fyziky (2).
Obr. 8.1 Pole (3) Skalárne pole (skalárnu funkciu) dvoch premenných z = z(x, y) možno graficky znázorniť niekoľkými spôsobmi: a) 3d plochou, b) 2d vrstevnicovou mapou, c) farebnou 2d mapou.
Na obr.8.2a je znázornený graf funkcie ( )
22
222sin),(
yx
yxyxz
++
= ako plocha v trojrozmernom
karteziánskom súradnicovom systéme (O; x, y, z). Vrstevnicovú mapu korešpondujúcu danej ploche zobrazuje obr. 8.2b. Príkazy programu Maxima: a) plot3d(sin(x^2+y^2)/( 2*x^2+y^2), [x,-.01,%pi], [y,-.01,%pi], [plot_format,gnuplot])$ b) draw3d(color = green, explicit(sin(x^2+y^2)/( 2*x^2+y^2),x,-.01,%pi,y,-.01,%pi), contour_levels = 10, contour = map). Farebná 2d mapa je na obr. 8.2c.
Obr. 8.2ab Graf plochy a vrstevnicová mapa pre funkciu
( )22
222sin),(
yx
yxyxz
++
=
Obr. 8.2c Farebná 2d mapa (12)
8 Typografická poznámka: vektorové veličiny, napríklad r, v, a, E, D píšeme v tlačenom matematickom texte
tučnou kurzívou; pri písaní voľnou rukou zapisujeme nad písmeno šípku: rr
, vr
, ar
, Er
, Dr
.

88
Spôsoby grafickej reprezentácie vektorového poľa (vektorovej funkcie) dvoch premenných z = z(x, y) sú napr. pomocou: a) vektorov (13), b) siločiar (14), c) šumovej textúry (13) (obr. 8.3abc). Na ich zobrazenie osvedčenými sú viaceré licencované programy ako ANSYS, COMSOL, MATLAB, MATHEMATICA, MATHCAD.
Obr. 8.3abc Graf vektorového poľa pomocou: a) vektorov (13), b) siločiar (14), c) šumovej textúry (13)
Riešené úlohy Príklad 1. Daným funkciám priraď špecifikáciu – jednu zo štyroch alternatív (skalárna/vektorová, jedna premenná/viacej premenných) uvedených v tabuľke.
skalárna funkcia, napr. f
vektorová funkcia, napr. f
jedna premenná, napr. x
skalárna funkcia jednej premennej x → f(x) číslo (skalár) → číslo (skalár)
vektorová funkcia jednej premennej x → f(x) číslo (skalár) → vektor
viacej premenných, napr. (x, y, z), resp. bod X, X = (x, y, z)
skalárna funkcia viacerých premenných (skalárne pole) (x, y, z) → f(x, y, z), resp. X → f(X), bod → číslo (skalár)
vektorová funkcia viacerých premenných (vektorové pole) (x, y, z) → f(x, y, z), resp. X → f(X), bod → vektor
a) r(x, y, z) = xi + yj + zk = (x, y, z), b) u(x, y, z) = x2 – 2yz, c) z(x) = y2i – 2x2zj + xyzk = (y2, – 2x2z, xyz), d) z(x, y) = xy2, e) F(X) = (x3 + y3)i + xaybzcj – x sin(yz)k = (x3 + y3, xaybzc, – x sin(yz)), f) f(x) = sinx - 7x3,
g) f(x) = 3x2i – x
e x
cos
2
j + log(1 – x3)k = ( )
− 3
22 1log,
cos,3 x
x
ex
x
,
h) f(X) = 3x2zln(y + 1) + )3(
22 −xarctg
yzα, X = (x, y, z),
ch) f(X) = 2xyzi + 3x2eyk = (2xyz, 0, 3x2ey).

89
Riešenie: a) vektorová funkcia viacerých (troch) premenných x, y, z, b) skalárna funkcia viacerých (troch) premenných x, y, z, c) vektorová funkcia jednej premennej x, (y a z považujeme za parametre), d) skalárna funkcia viacerých (dvoch) premenných x, y, e) vektorová funkcia viacerých (troch) premenných x, y, z, f) skalárna funkcia jednej premennej x, g) vektorová funkcia jednej premennej x, h) skalárna funkcia viacerých (troch) premenných x, y, z, ch) vektorová funkcia viacerých (troch) premenných x, y, z.
Príklad 2. Nech funkcia f(x, y, z) = 222 zyx
x
++. Vypočítajte
a) gradient funkcie f v bode X = (x, y, z), b) gradient funkcie f v bode A = (1, 2, 2), c) veľkosť gradientu z časti b), d) deriváciu funkcie f v smere vektora s = AB, B = (3, 4, 5), v bodoch X, A a L, L = (0, – 1, 1). Riešenie: a) Gradient skalárnej funkcie je vektor daný nasledovne: grad f(X) = ( '
xf , 'yf , '
zf ), resp. grad f(X) = 'xf i + '
yf j + 'zf k. Vektor grad f(X) možno zapísať
tiež pomocou vektorového operátora nabla (Hamiltonovho operátora)
∂∂
∂∂
∂∂=∇
zyx,, :
grad f(X) = )(Xf∇ .
Keďže 'xf = ( )2222
222
zyx
zyx
++
++−, '
yf = ( )2222
2
zyx
xy
++
−, '
zf = ( )2222
2
zyx
xz
++
−, potom
grad f(X) = ( ) ( )2222222 2,2, zyxxzxyzyx ++−−++− .
b) grad f(A) = (7, – 4, – 4)/81 =
−−81
4,
81
4,
81
7= kji
81
4
81
4
81
7 −− .
c) Gradient funkcie je vektor. Veľkosť gradientu teda vypočítame štandardne – spôsobom známym zo strednej školy: veľkosť vektora sa rovná druhej odmocnine zo súčtu štvorcov súradníc vektora.
|grad f(A)| = 9
1
81
4
81
4
81
7222
=
−+
−+
.
d) Derivácia skalárnej funkcie v smere daného vektora je rovná skalárnemu súčinu dvoch vektorov: gradientu danej funkcie a jednotkového vektora v smere daného vektora (ktorý ako
taký nemusí byť jednotkový), teda ( )
=sd
Xdfgrad f(X) . s0. Gradient f(X) je známy z časti a).
Pre vektor s = AB platí, že s = (3, 4, 5) – (1, 2, 2) = (2, 2, 3). Potom veľkosť vektora s je |s| =
= 17 , teda s0 = s/|s| = (2, 2, 3)/ 17 . ( )
=sd
Xdf ( ) ( )2222222 2,2, zyxxzxyzyx ++−−++− . ( ) 173,2,2 =
= ( )2222
222
17
64222
zyx
xzxyzyx
++
−−++−,

90
( )=
sd
Adf
1727
2− , ( )
=sd
Ldf
172
1.
Príklad 3. Daná je funkcia (rovinné skalárne pole) z(x, y) = x2 + y2. a) Pomocou programu Maxima zobrazte v karteziánskom súradnicovom systéme graf plochy danej funkciou z(x, y). b) Zobrazte plochu súčasne s vrstevnicami pre niekoľko hodnôt funkcie z, a tiež kolmý priemet vrstevníc do roviny xy. c) Pre ľubovoľný vhodný výber bodov na niektorej vrstevnici graficky demonštrujte, že vektor grad z má v každom zo zvolených bodov smer kolmý na vrstevnice.
Riešenie: a) Príkaz Plot3D na vykreslenie 3d-objektu je na dolnej lište (druhý riadok, posledný stĺpec). Do dialógového okna zapíšeme výraz z pravej strany explicitného zadania funkcie, hraničné hodnoty premenných x, y a formát obrázka (gnuplot). Po odoslaní vstupných údajov zobrazia sa ony na obrazovke v riadkovej forme a za okamih okno s geometrickým objektom – v tomto príklade je to rotačný paraboloid s osou v osi z, s vrcholom v začiatku súradnicovej sústavy, otvorený v smere z+.
Obr. 8.4 Vstupné údaje na zobrazenie rotačného paraboloidu
Syntax príkazu Plot3D:
Obr. 8.5 Rotačný paraboloid (pre vstupné údaje z obr. 8.2) b) Príkaz na vykreslenie mapky s vrstevnicami:

91
Vrstevnice (izočiary, resp.izolínie) odpovedajú konštantným hodnotám funkcie z. Sú to kružnice s rovnicami konšt = x2 + y2.
Obr. 8.6 Mapa s vrstevnicami
Vykreslenie izolínií na ploche v 3d si vyžaduje upload balíka draw:
Príkaz na vykreslenie plochy včítane desiatich vrstevníc na nej:
Obr. 8.7 Rotačný paraboloid spolu s vrstevnicami
Príkaz na vykreslenie mapy s vrstevnicami, t. j. obrazu ich kolmého priemetu do roviny kolmej na os z, napr, xy:

92
Obr. 8.8 Mapa s vrstevnicami získaná alternatívnym spôsobom k spôsobu použitému na vykreslenie vrstevníc na obr. 8.4
c) Zo zadania máme skalárnu funkciu z(x, y) = x2 + y2. Potom gradient bude predstavovať rovinné vektorové pole grad z(x, y) = (2x, 2y). Zvoľme ľubovoľnú vrstevnicu napr. 1 = x2 + y2, čo je kružnica s polomerom 1 so stredom v bode (0, 0, 1) na osi z, v rovine z = 1. Na jej kolmom priemete do roviny xy a ďalej, predpokladajúc 2d súradnicovú sústavu (O; x, y)) zvoľme niekoľko
bodov napr. (1, 0), (1/2 , 1/ 2 ), (0, 1). Odpovedajúce gradienty v týchto bodoch sú
vektory so súradnicami (2, 0), (2/2 , 2/ 2 ), (0, 2),. V programe Win-Plot zobrazíme kružnicu, tri zvolené body a tri vektory. Poznámka: Vektor zadávame ako orientovanú úsečku, kde koncový bod je daný súčtom súradníc začiatočného bodu a súradníc vektora gradientu v tomto bode.
Obr. 8.9 Vstupné údaje na zobrazenie orientovanej úsečky

93
Obr. 8.10 Voľba príkazov na vykreslenie úsečky
Obr. 8.11 Gradient funkcie z je vektor kolmý na vrstevnice a jeho orientácia odpovedá smeru najrýchlejšieho rastu hodnôt funkcie z
Príklad 4. Vypočítajte divergenciu a rotáciu vektorovej funkcie f(X) v bode A, ak f(X) = exyzi + sin x.sin y.sin z j + ln(x + y + z)k, A = (0, 2, – 1). Riešenie: Trojrozmerná vektorová funkcia f(X) má tri súradnice. Tie sa – vo všeobecnosti označujú napríklad niektorým zo spôsobov: f(X) = (P, Q, R) resp. (f1, f2, f3) alebo (fx, fy, fz). V ďalšom použijeme prvý spôsob, teda platí P = exyz, Q = sin x.sin y.sin z, R = ln(x + y + z).

94
Pre divergenciu vektorovej funkcie máme div f(X) = 'xP + '
yQ + 'zR .
')( xXP = (exyz)´x = exyzyz; ')( xAP = – 2, ')( yXQ = sin x.sin z.cosy, ')( yAQ = 0,
')( zXR = zyx ++
1, ')( zAR = 1,
div f(A) = – 2 + 0 + 1 = – 1. Poznámka: Divergencia vektorovej funkcie v danom mieste slúži vo fyzike ako test na zdroje. Keďže v bode A je divergencia záporná (div f(A) = – 1), pole f(X) sa do daného miesta „vnára“ – ako napríklad rýchlostné pole vo výlevke. Pre rotáciu vektorovej funkcie platí vzťah
rot f(X) = ( ) ( ) ( )kji
kji''''''yxxzzy PQRPQR
RQPzyx
−+−+−=∂∂
∂∂
∂∂
= ( )'''''' ,, yxxzzy PQRPQR −−− ,
')( yXP = exyzxz; ')( yAP = 0,
')( zXP = exyzxy; ')( zAP = 0,
')( xXQ = sin y.sin z.cosx, ')( xAQ = – sin2.sin1,
')( zXQ = sin x.sin y.cosz, ')( zAQ = 0,
')( xXR = zyx ++
1, ')( xAR = 1,
')( yXR = zyx ++
1, ')( yAR = 1,
rot f(A) = (1 – 0)i + (0 – 1)j + (– sin2.sin1 – 0)k = (1, – 1, – sin2.sin1). Poznámka: Operácia rotácie je testom na víry. V mieste A platí, že aspoň jedna zo súradníc vektora rotácie je nenulová. To znamená, že v bode A je stred víru. Aplikácie 1. Teória elektromagnetického poľa je najprepracovanejšou fyzikálnou teóriou. Jej správnosť potvrdilo obrovské množstvo experimentov. Elektromagnetická interakcia je jednou zo štyroch základných interakcií (popri interakcii slabej, silnej a gravitačnej). Pri analytickom vyjadrení jej vlastností pomocou matematického jazyka sa – okrem iného – používajú operácie gradient, divergemcia a rotácia. Matematická operácia gradient priradí skalárnemu poľu vektor, ktorý je kolmý na izočiary (v rovine), resp. na izoplochy (v 3d priestore) a je orientovaný k zvyšujúcim sa hodnotám skalárneho poľa.

95
Matematická operácia divergencia zisťuje, či sa v danom mieste nachádza zdroj poľa (test na zdroje). Divergencia (div) je jedno číslo charakterizujúce pole v danom bode priestoru. Ak je: a) väčšia ako nula => pole z daného miesta vyviera (napr. elektrické pole z kladného náboja), b) menšia ako nula => pole sa do daného miesta vnára (napr. rýchlostné pole v kuchynskej výlevke), c) nulová => pole daným miestom len prechádza (napr. pole magnetov). Matematická operácia rotácia zisťuje, či sa v danom mieste nachádza stred poľného víru (test na víry). Vír sa uvažuje rovinný, a tak pri pohľade naň iba v jeho rovine nebol by vír identifikovateľný. Preto na jeho detekciu sú nutné pohľady naň z troch navzájom kolmých smerov. Výsledkom operácie rotácie sú teda tri čísla tvoriace vektor. Pokiaľ je aspoň jedna súradnica tohto vektora nenulová, v danom bode priestoru existuje stred víru (4). Základom teórie elektromagnetického poľa sú Maxwellove rovnice. Tie môžu byť zapísané jednak v integrálnom, ale aj v diferenciálnom tvare napr. (4), (5):
Zápis pomocou skrátených verzií slov divergencia, rotácia Hamiltonovho nabla operátora ∇
div E = 0ε
ρ ∇ . E =
0ερ
div B = 0 ∇ . B = 0
rot E = t∂
∂− B ∇ × E =
t∂∂− B
c2 rot B = 0
j
ε
t∂∂+ E
c2 ∇ × B = 0
j
ε
t∂∂+ E
2. Rovnica vedenia tepla, ak nepredpokladáme vnútorné tepelné zdroje, má v karteziánskej súradnicovej sústave v bode prostredia X tvar a) pre stacionárny prípad: gradTq λ−= .
dimenzia n súradnice bodu X
závislosť teploty T od bodu X
zápis pomocou zložiek Hamiltonovho operátora nabla ∇
1 (priamka)
(x)
T = T(x) x
Tq
∂∂−= λ
2 (rovina)
(x, y)
T = T(x, y)
∂∂+
∂∂−=
y
T
x
Tq λ
3 (priestor 3d)
(x, y, z)
T = T(x, y, z)
∂∂+
∂∂+
∂∂−=
z
T
y
T
x
Tq λ
teplota T je skalárnou funkciou jednej, dvoch alebo troch premenných.
b) pre nestacionárny prípad TDt
T 2∇=∂∂
, resp. v zápise pomocou zložiek nabla operátora
v trojrozmernom priestore
∂∂+
∂∂+
∂∂=
∂∂
2
2
2
2
2
2
z
T
y
T
x
TD
t
T,

96
kde T(x, y, z, t) je teplota v čase t v bode (x, y, z), teda tentokrát je to skalárna funkcia štyroch premenných x, y, z, t; pozri napr. (6), (7). Operátor 2∇ = div grad sa nazýva Laplaceov operátor („laplasián“) a označuje sa aj symbolom9 ∆ . 3. Rovnica dosky v teórii pružnosti je nehomogénna, lineárna parciálna diferenciálna rovnica štvrtého rádu pre neznámu (skalárnu) funkciu w(x, y). Pomocou Laplaceovho operátora (čo je to isté ako divergencia gradientu daného skalárneho poľa) má v karteziánskych súradniciach tvar
( ) ( )D
yxpyxw
,,2 =∆ ,
kde funkcia w(x, y) predstavuje premiestnenia bodov (x, y) dosky v smere kolmom na rovinu dosky a D je dosková konštanta závisiaca od hrúbky dosky h, Youngovho modulu pružnosti E a Poissonovho čísla µ (8). Funkcia w(x, y) je skalárnou funkciou dvoch premenných x, y. V zápise pomocou zložiek Hamiltonovho operátora nabla ∇ má rovnica dosky tvar
D
p
y
w
x
w =
∂∂+
∂∂
2
2
2
2
2
resp. D
p
y
w
y
w
x
w
x
w =∂∂+
∂∂
∂∂+
∂∂
4
4
2
2
2
2
4
4
2 .
4. Medzi veľmi známe parciálne diferenciálne rovnice patrí tiež vlnová rovnica
02
22 =
∂∂−∆
t
uua resp. 0
2
2
2
2
2
2
2
22 =
∂∂−
∂∂+
∂∂+
∂∂
t
u
z
u
y
u
x
ua
s vlnovou funkciou u(x, y, z, t) = u(r, t) = u(X, t), čo je skalárna funkcia štyroch premenných, ak predpokladáme trojrozmerný karteziánsky súradnicový systém (0; x, y, z); napr. (5), (7), (9).
5. V teórii elektrického kvadrupólového poľa (10) sa narába s členmi typu r
1∇ , r
1∇∇ ,
r
1∇∇∇ , r
1∇∇∇∇ , r ≠ 0, kde r je veľkosť (dĺžka) vektora r. Polohový vektor r má
v karteziánskej súradnicovej sústave (0; x, y, z) súradnice r = (x, y, z). Pre jeho dĺžku platí
r = | r| = 222 zyx ++ . (V dvojrozmernom súradnicovom systéme (0; x, y) je r = (x, y),
r = | r| = 22 yx + .) V neriešenej úlohe číslo 10 si možno overiť správnosť tvaru výsledného
matematického objektu, a tiež aj jeho zatriedenie do skalárneho/vektorového poľa. Úlohy 1. Vypočítajte deriváciu funkcie f v bode A v smere vektora s, ak je dané: f(X) = 3x3 – 4y3 + 2z4, A = (2, 2, 1) a vektor s je určený vektorom B – A, kde B = (5, 4, 6).
9 Tento symbol sa však nesmie zamieňať s malým prírastkom delta ∆ .

97
2. Nech 22
4
yxz
+= , (x, y) ≠ (0, 0), a = (1, –1). Vypočítajte: a) grad z, b) | grad z|,
c) grad z(1, 1), d) ad
dz )1,1(.
3. Nech f(x, y, z) = x2y2 + x2z2 + y2z2. Vypočítajte: a) deriváciu funkcie f v bode A v smere ľubovoľného jednotkového vektora, b) grad f(A), c) | grad f(A)|, d) [grad f(A)]0, kde
A = ( 3 41 , 3 41 , 3 41 ).
4. Nech funkcia – tzv. Newtonovský potenciál – r
1=u , kde r = (x, y, z), | r| ≠ 0, a = (1, 2, 2).
Vypočítajte: a) grad u, b) | grad u|, c) grad u(2, 2, –1), d) ad
du )1,2,2( −.
5. Postupom z riešeného príkladu č. 4 zobrazte graf plochy včítane vrstevníc na ploche, mapu vrstevníc a gradient skalárnej funkcie 2 premenných z(x, y), ak a) z(x, y) = x2 – y2, b) z(x, y) = = xy, c) z(x, y) = – xy. 6. Vypočítajte divergenciu a rotáciu vektorovej funkcie f(X) v bode A, A = (1, – 1, 2), ak
f(X) = kjix
z
y
xz
y
x ln2
2
++ .
7. Daná je vektorová funkcia f(X) = ( ).23sin
kji +−z
yx Vypočítajte jej divergenciu
a rotáciu. 8. Nech f(x, y, z) = (x2y, xy2, xy). Vypočítajte a) div f, b) rot f, c) grad div f, d) div rot f.
9. Nech f(X) = r/r10, resp. f(X) = kji222222222 zyx
z
zyx
y
zyx
x
+++
+++
++,
(r ≠ 0). Vypočítajte: a) div f, b) rot f.
10. Nech r = | r|, kde r = (x, y, z), (r ≠ 0). Vypočítajte a) r∇ , b) r
1∇ , c) r
1∇∇ , d) r
1∇∇∇ ,
e) r
1∇∇∇∇ . Rozhodnite, či výsledný objekt je skalárna alebo vektorová veličina.
Riešenia
1. 38/52 . 2. a) grad z = ( ) ( ) ( )4
2
222222
8,
2
8,
8
ryx
z
yx
y
yx
x −=−=
+
−
+
−r,
b) | grad z| = ( ) 2/322
8
yx +, c) grad z(1, 1) = (– 2, – 2), d)
da
dz )1,1( = 0. 3. a) s0
x + s0y + s0
z,
kde s0x, s
0y, s
0z sú súradnice jednotkového vektora, b) i + j + k, c) 3 , d) (i + j + k)/ 3 .
4. a) grad u =( ) ( ) ( )
++
−
++
−
++
−=−322232223222
3,,
zyx
z
zyx
y
zyx
x
r
r, kde | r| = r,
10 r/r = r
0, kde r 0 je jednotkový vektor v smere vektora r.
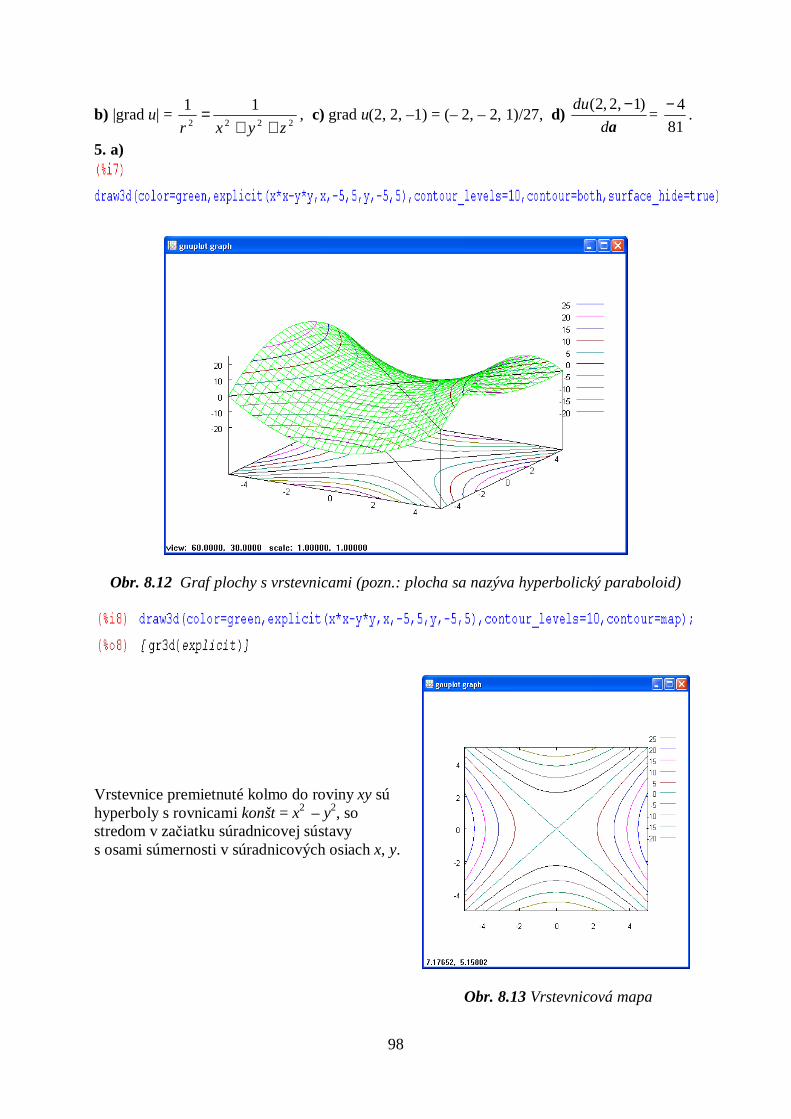
98
b) |grad u| = 2222
11
zyxr ++= , c) grad u(2, 2, –1) = (– 2, – 2, 1)/27, d)
ad
du )1,2,2( −=
81
4−.
5. a)
Obr. 8.12 Graf plochy s vrstevnicami (pozn.: plocha sa nazýva hyperbolický paraboloid)
Vrstevnice premietnuté kolmo do roviny xy sú hyperboly s rovnicami konšt = x2 – y2, so stredom v začiatku súradnicovej sústavy s osami súmernosti v súradnicových osiach x, y.
Obr. 8.13 Vrstevnicová mapa

99
Vrstevnica: 1 = x2 – y2, 3 body
na vrstevnici: (1, 0), (2,3 ), (6, 35 ), grad z(x, y) = (2x, – 2y).
Obr. 8.14 Vektor gradientu je v každom bode
kolmý na vrstevnicu b)
Obr. 8.15 Graf plochy s vrstevnicami

100
Vrstevnice sú hyperboly s rovnicami konšt = xy so stredom v začiatku, s osami, ktoré prechádzajú začiatkom a dvojicami kvadrantov prvý-tretí, druhý-štvrtý.
Obr. 8.16 Vrstevnicová mapa
Vrstevnica: 1 = xy, 3 body na vrstevnici: (1, 1), (2, 1/ 2), (4, 1/4), grad z(x, y) = (y, x).
Obr. 8.17 Gradient je v každom bode kolmý na vrstevnicu

101
c)
Obr. 8.18 Graf plochy s vrstevnicami
Vrstevnice sú hyperboly s rovnicami konšt = – xy so stredom v začiatku, s osami, ktoré prechádzajú začiatkom a dvojicami kvadrantov prvý-tretí, druhý-štvrtý.
Obr. 8.19 Izolíniová mapa

102
Vrstevnica: 1 = – xy, 3 body na vrstevnici: (– 1, 1), (– 2, 1/ 2), (– 4, 1/4), grad z(x, y) = (– y, – x).
Obr. 8.20 Vektor gradientu kolmý na vrstevnicu v každom jej bode.
6. divf (X) = xzy
xz
y
x 1223
+− , divf (A) = 5/2, rotf (X) = kji
+++−
2
2
222
ln
y
x
y
z
x
z
y
x,
rotf (A) = (–1, ln2, 3). 7. divf (X) = ,sin
2cossin
32z
yx
z
yx
z
y−−
rotf (X) = .cos
3sinsin
2sin
3sincos
222
kji
−−+
−−+
−z
yx
z
y
z
y
z
yx
z
yx
z
yx
8. a) div f = 4xy, b) rot f = xi – yj + (y2 – x2)k, c) grad div f = 4yi + 4xj + 0.k, d) div rot f = 0, (pozn.: nula ako skalár, t. j. číslo). 9. a) div f = 2/| r|, b) rot f = 0, (pozn.: nulový vektor, t. j.
0 = (0, 0, 0)). 10. a) r
r= r
0, kde r 0 je jednotkový vektor v smere vektora r; výsledná veličina
je vektor, b) 3r
r− ; vektor, c) 0; skalár, d) 0; nulový vektor, e) 0; skalár.
Zoznam bibliografických odkazov 1. MACCORMICK, John. Nine AlgorithmsThat Changed the Future. The Ingenious Ideas
That Drive Today´s Computers. Princeton University Press, 2012. 2. MOYERS, Bill. Rozhovor s fyzikem Stevenem Weinbergem. Spektrum, 1990, 71. 3. foto: BEDNÁR, Michal. [cit. 2012-06-11]. Dostupné na internete: http://www.
hranovnica.sk/obec_foto.htm 4. KULHÁNEK, Petr. Elektřina a magnetizmus. Čs. čas. fyz., 2010, 60 (1), 17-20. 5. FEYNMAN, R. P., LEIGHTON, R. B., SANDS, M. Feynmanovy přednášky z fyziky
s řešenými příklady 2/3. Praha: Fragment, 2001.

103
6. TARABA, B., BEHÚLOVÁ, M., KRAVÁRIKOVÁ, H. Mechanika tekutín. Termomechanika. Bratislava: STU, 2004.
7. WOAN, Graham. The Cambridge Handbook of Physics Formulas. Cambridge University Press, 2002.
8. KAISER, J., SLOŽKA, V., DICKÝ, J., JURASOV, V. Pružnosť a plasticita. Bratislava: Alfa, 1990.
9. WYLIE, C. R., BARRETT, L. C. Advanced Engineering Mathematics. McGraw-Hill, 1995.
10. GRAY, C. G., KARL, G. Quadrupolar contact fields: Theory and applications. Am J Phys 2009, 77(9).
11. MIŠÚTOVÁ, M., MARKECHOVÁ, I., STÚPALOVÁ, H., ČERVEŇANSKÁ, Z., HAMPLOVÁ, L., KOTIANOVÁ, J., KREMŽÁROVÁ, L. Matematika II s podporou programov WinPlot a Maxima. Trnava: AlumniPress 2010, 114 s. ISBN 978-80-8096-127-5. [cit. 2012-06-25]. Dostupné na internete: https://is.stuba.sk
12. LOTTES, S. A., LYCZKOVSKI, R. W. Argonne Models Alternate Hydrogen-production Technique. [cit. 2012-06-25]. Dostupné na internete: http://www.comsol.com/ stories/lottes_h2_economy/
13. Elektřina a magnetizmus → Názorná exkurze→ Vektorová a skalární pole. [cit. 2012-06-25]. Dostupné na internete: http://www.aldebaran.cz/elmg/exkurze_vekt.html
14. MIKOLANDA, Tomáš. Modelování a vizualizace elektromagnetických polí v MATLABu. [cit. 2012-06-25]. Dostupné na internete: http://www.mti.tul.cz

104
PRÍLOHA
Niektoré syntaktické pravidlá zadávania matematických výrazov v programoch Maxima (1) a WinPlot (2).
Výraz Maxima WinPlot π %pi pi e %e e i %i ∞ inf PInf
∞− minf NInf xx π−3 3*x-%pi*x 3x-pi*x
( ) ( )1:532 2 ++− xxx
(2*x*x-3*x+5)/(x+1)
(2xx-3x+5)/(x+1) alebo (2*x*x-3*x+5)/(x+1)
5x x^5 x^5 alebo power(5,x)
x x^(1/2) alebo sqrt(x) x^(1/2) alebo sqr(x) alebo sqrt(x)
3 x x^(1/3) x^(1/3) alebo root(3,x)
3 2x x^(2/3) x^(2/3)
x abs(x) abs(x)
xsin sin(x) sin(x) x2cos2 (cos(2*x))^2 (cos(2x))^2 alebo (cos(2*x))^2
3tg
π
tan(%pi/3) tan(pi/3)
xcotg cot(x) cot(x) xarcsin asin(x) arcsin(x) xarccos acos(x) arccos(x)
xarctg atan(x) arctan(x) alebo atn(x) xarccotg acot(x) arccot(x)
xln log(x) ln(x) xlog log(x)
x2log log(2,x) alebo lg(2,x) xe exp(x) alebo %e^x exp(x) alebo e^x
523 +x 3^(2*x+5) 3^(2x+5) alebo 3^(2*x+5) súčin matíc A, B A.B (Nie A*B!) Zoznam bibliografických odkazov 1. BUŠA, J. Maxima. Košice: FEI TU, 2006. [cit. 2012-06-25]. Dostupné na internete:
http://people.tuke.sk/jan.busa/kega/maxima/maxima.pdf 2. [cit. 2012-06-25]. Dostupné na internete: http://math.exeter.edu/rparris/winplot.html

105
OBSAH
ÚVOD ......................................................................................................................................3
1 URČITÝ INTEGRÁL .......................................................................................................4
2 GEOMETRICKÉ APLIKÁCIE URČITÉHO INTEGRÁLU ........................................11
3 NEVLASTNÝ INTEGRÁL ...........................................................................................19
4 PRIESTOR E2, E3. FUNKCIA DVOCH A VIAC PREMENNÝCH...........................26
5 PARCIÁLNE DERIVÁCIE, DOTYKOVÁ ROVINA KU GRAFU FUNKCIE DVOCH PREMENNÝCH, FUNKCIA URČENÁ IMPLICITNE ................................38
6 LOKÁLNE EXTRÉMY FUNKCIE DVOCH PREMENNÝCH, VIAZANÉ LOKÁLNE EXTRÉMY FUNKCIE DVOCH PREMENNÝCH ..................................59
7 GLOBÁLNE EXTRÉMY FUNKCIE DVOCH PREMENNÝCH ...............................75
8 VEKTOROVÁ ANALÝZA ..........................................................................................87
PRÍLOHA ...........................................................................................................................104
106
Autori: Doc. RNDr. Mária Mišútová, PhD., RNDr. Iveta Markechová, CSc.,
PaedDr. Lujza Čipková Hamplová, PhD., PaedDr. Lilla Kremžárová, PhD.
Názov: Matematika II. Vybrané časti matematickej analýzy a ich aplikácie Matematics II. Parts of mathematic analysis and its applications
Miesto vydania: Trnava Vydavateľ: AlumniPress Rok vydania: 2012 Vydanie: prvé Rozsah : 105 strán Edičné číslo: 13/AP/2012 ISBN 978-80-8096-169-5 EAN 9788080961695
zverejnené na https://is.stuba.sk