visao computacional na navegacao
TRANSCRIPT

Uso da Visão Computacional na Navegação
Grupo 1:
Wesley Gabriel C. Prates
Luciano do Amaral
Marielle Ribeiro
PROF. Dr. ANDRE ANDRADE
1 Sem. 2015

Visão computacional é a ciência e tecnologia das máquinas que enxergam. Ela desenvolve teoria e tecnologia para a construção de sistemas artificiais que obtém informação de imagens ou quaisquer dados multi-dimensionais.
Introdução a visão computacional
A visão computacional também pode ser descrita como um complemento da visão biológica, ela estuda e descreve sistemas de visão artificial implementados por hardware ou software.
Introdução a visão computacional

Exemplo de visão computacional

Trata-se de um conceito de pulverizador autônomo, totalmente desenvolvido pela empresa com o intuito de gerar tecnologias, conhecimentos e experiências para futuros produtos que necessitem de especificidades na realização de tarefas em campo sem a presença humana.
Projeto JAV (Jacto Autonomous Vehicle)
Foto: http://www.fsnt.com.br/arquivo/evento/thumb0x260/1309964872403jpg1368190520518cee38a18e2.jpg

O JAV II é equipado com hardware de controle, GPS XP, unidades de medida inercial, câmera estéreo, ultrassom (sensores de planta), sensor de combustível, sensor de volume de calda, sensores de esterçamento, sensor de nível do óleo hidráulico e informações georreferenciadas da aplicação.
Projeto JAV (Jacto Autonomous Vehicle)

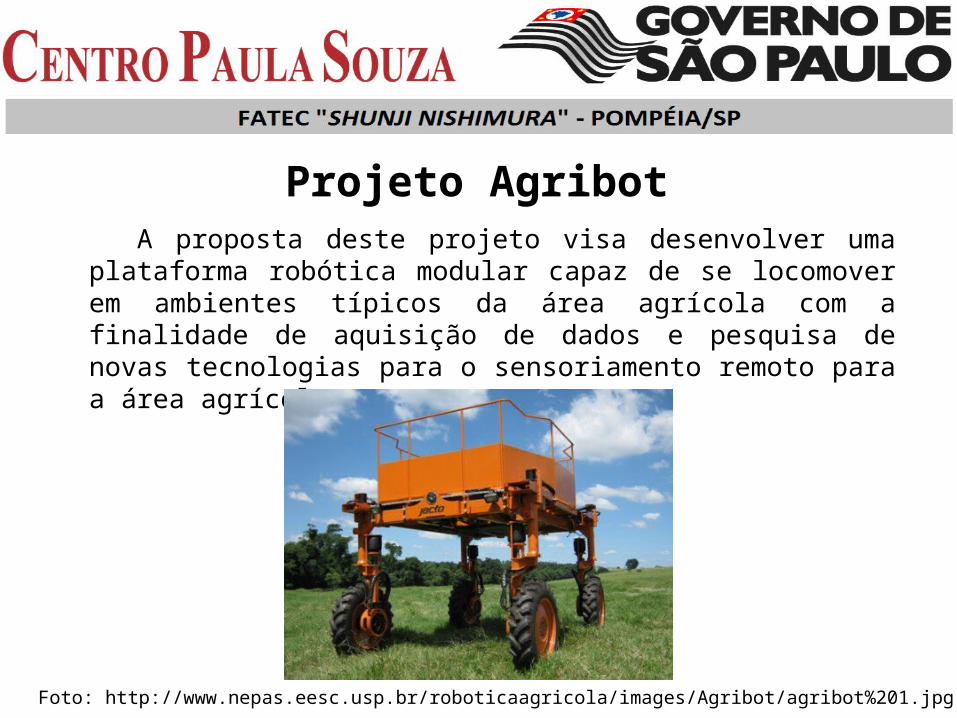
Projeto Agribot A proposta deste projeto visa desenvolver uma plataforma
robótica modular capaz de se locomover em ambientes típicos da área agrícola com a finalidade de aquisição de dados e pesquisa de novas tecnologias para o sensoriamento remoto para a área agrícola.
Foto: http://www.nepas.eesc.usp.br/roboticaagricola/images/Agribot/agribot%201.jpg

Visão Computacional que consiste no sistema para captura e análise de imagens de cenas agrícolas relacionadas ao percurso efetuado pela plataforma robótica. Tais imagens poderão ser utilizadas para fins de navegação e de obtenção de informações sobre as culturas.
Projeto Agribot


Conceito ANTS Valtra
Foto: www.valtra.com.br/institucional/conceito-valtra-ants


• Pode funcionar por até 36 horas seguidas;• Pode ser controlado até por uma pessoa sem experiência• Uma pessoa pode controlar até 16 tratores ao mesmo tempo em uma área de 25 quilômetros
Spirit® Implement Tractor Platform
Fotos: http://www.autonomoustractor.com/


Google Car
Basicamente possui sensores nos parachoques, além de utilizar GPS e câmeras para sua locomoção. Conta com apenas um botão para ligar e um para desligar, todo o trajeto é feito via programação.
Foto: http://circanews.com/news/googles-self-driving-cars

Conclusão

http://www.grupocultivar.com.br/site/content/noticias/?q=20444
http://www.youtube.com/watch?v=JwTm1kQ2gE0
http://www.nepas.eesc.usp.br/roboticaagricola/index.php/robos-agricolas/agribot
http://www.fsnt.com.br/eventos/jacto-lanca-o-jav-ii/
http://www.valtra.com.br/institucional/conceito-valtra-ants
http://www.autonomoustractor.com/
http://www.teses.usp.br/teses/disponiveis/55/55134/tde-22092014-095209/pt-br.php
Referências

FIM