vigaaaasss
DESCRIPTION
investigacion de operacionesTRANSCRIPT

FACULTAD DE INGENIERIA CIVIL 2014
“AÑO DE LA PROMOCION DE LA INDUSTRIA RESPONSABLE Y COMPROMISO CLIMATICO”
UNIVERSIDAD NACIONAL DE PIURA
FACULTAD DE INGENIERÍA CIVIL
TEMA:ECUACIONES DIFERENCIALES APLICADAS A VIGAS Y PÉNDULO SIMPLE
CURSO: TOPOGRAFIA PARA INGENIEROS CIVILES II
DOCENTE: JAVIER CHUNGA MECHATO
INTEGRANTES: LITANO SANDOVAL PERCY O. SERNAQUE SILVA JUAN
PIURA - 2014-II
MATEMATICA III Página 1

FACULTAD DE INGENIERIA CIVIL 2014
INTRODUCCIÓN
Este trabajo ha sido elaborado con mucha dedicación y esfuerzo, colocando mucho énfasis en la información mostrada en el presente, pues ha sido desarrollada luego de una recurrir y analizar muchas fuentes de información sobre este tema. Por la información investigada puedo decir que LAS ECUACIONES DIFERENCIALES EN VIGAS Y PÉNDULO SIMPLE, nos resuelven muchos problemas, conjuntamente con la física, nosotros podemos calcular varios elementos como la forma de la deformada, analizar la forma en cómo actúa la fuerza cortante o el momento flector, o la forma y dirección que presenta la deformada. Gracias e esto nosotros podemos calcular la cantidad de acero o estribos que llevará una viga y en qué lugar colocarlo exactamente.
Las ecuaciones diferenciales no solamente tienen esta aplicación, en sí tienen muchas más aplicaciones dentro de la ingeniería civil, por ello puedo afirmar que las matemáticas son la base y herramienta primordial de todo campo de estudio,
Espero la información mostrada aquí pueda ser aprovechada no solamente por aquel profesional o persona que se dedique a este campo de aplicación, sino que sea información aprovechable por todos mis compañeros en general, pues este trabajo como vuelvo a mencionar una vez más ha sido elaborada luego de una investigación, considerando que la investigación, es un proceso por el que el ser humano se encarga de aclarar algunas dudas o inquietudes y para ampliar su campo de conocimiento.
MATEMATICA III Página 2

FACULTAD DE INGENIERIA CIVIL 2014
ESTUDIO DE VIGAS
Las ecuaciones diferenciales son muy interesantes en cuanto a la posibilidad que presentan para indagar sobre variedad de problemas de las ciencias físicas, biológicas y sociales. A partir de la formulación matemática de distintas situaciones se describen procesos reales aproximados.
VIGA.-En ingeniería y arquitectura se denomina viga a un elemento constructivo lineal que trabaja principalmente a flexión. En las vigas la longitud predomina sobre las otras dos dimensiones y suele ser horizontal.
En las vigas la longitud predomina sobre las otras dos dimensiones y suele ser horizontal.
DEFLEXIÓN DE UNA VIGA
El esfuerzo de flexión provoca tensiones de tracción y compresión, produciéndose las máximas en el cordón inferior y en el cordón superior respectivamente, las cuales se calculan relacionando el momento flector y el segundo momento de inercia. En las zonas cercanas a los apoyos se producen esfuerzos cortantes. También pueden producirse tensiones por torsión, sobre todo en las vigas que forman el perímetro exterior de un forjado. Estructuralmente el comportamiento de una viga se estudia mediante un modelo de prisma mecánico.
EJE DE SIMETRÍA
Un eje de simetría es una línea imaginaria que al dividir una forma cualquiera, lo hace en dos partes cuyos puntos opuestos son equidistantes entre sí, es decir, quedan simétricos
CURVA ELÁSTICA
MATEMATICA III Página 3

FACULTAD DE INGENIERIA CIVIL 2014
La curva elástica o elástica es la deformada por flexión del eje longitudinal de una viga recta, la cual se debe a momentos, fuerzas y cargas distribuidas aplicadas sobre la viga.
ECUACIÓN DE LA ELÁSTICA
La ecuación de la elástica es la ecuación diferencial que, para una viga de eje recto, permite encontrar la forma concreta de la curva elástica. Concretamente la ecuación de la elástica es una ecuación para el campo de desplazamientos que sufre el eje de la viga desde su forma recta original a la forma curvada o flectada final. Para una viga de material elástico lineal sometido a pequeñas deformaciones la ecuación diferencial de la elástica viene dada por:
2
2
( )( )...(1)z
z
M xd v x
dx EI
Donde
( )v x : representa la flecha, o desplazamiento vertical, respecto de la posición sin cargas.
x : La ordenada sobre la viga.
( )zM x: El momento flector sobre la ordenada .
zI : El segundo momento de inercia de la sección transversal.
E : El módulo de elasticidad del material.
La ecuación (1) constituye sólo una aproximación, en la que se ha supuesto que las deformaciones son muy pequeñas con respecto a las dimensiones de la viga y, por tanto, se ha aproximado el giro de una sección de la viga con la derivada primera de la flecha. Para deformaciones mayores se obtiene la ecuación más exacta (1'):
32 2
2
( )( ) ( )1 ...(1')z
z
M xd v x dv x
dx EI dx
La ecuación de la elástica (1) puede ser reescrita en función de la carga distribuida q(x) sobre la viga:
MATEMATICA III Página 4

FACULTAD DE INGENIERIA CIVIL 2014
2 2
2 2
( )( ) ...(2)Z
d d v xEI q x
dx dx
Esta última ecuación es interesante porque su generalización a elementos bidimensionales es precisamente la ecuación fundamental de gobierno de placas o ecuación de Lagrange para placas delgadas:
2 2 2 2
2 2 2 2
( , ) ( , )( , )pl
w x y w x yEI q x y
x y x y
Donde
plD EI : es la rigidez de una placa delgada en flexión.
FLEXIÓN DE UNA VIGA
Se usará una barra empotrada de un determinado material, de longitud L, de anchura a y de espesor b. Se fijará uno de sus extremos y se aplicará una fuerza en su extremo libre. Mediremos el desplazamiento del extremo libre y(L) o flecha en función de la fuerza aplicada F, comprobando su relación de proporcionalidad, mientras que la flexión de la barra sea pequeña.
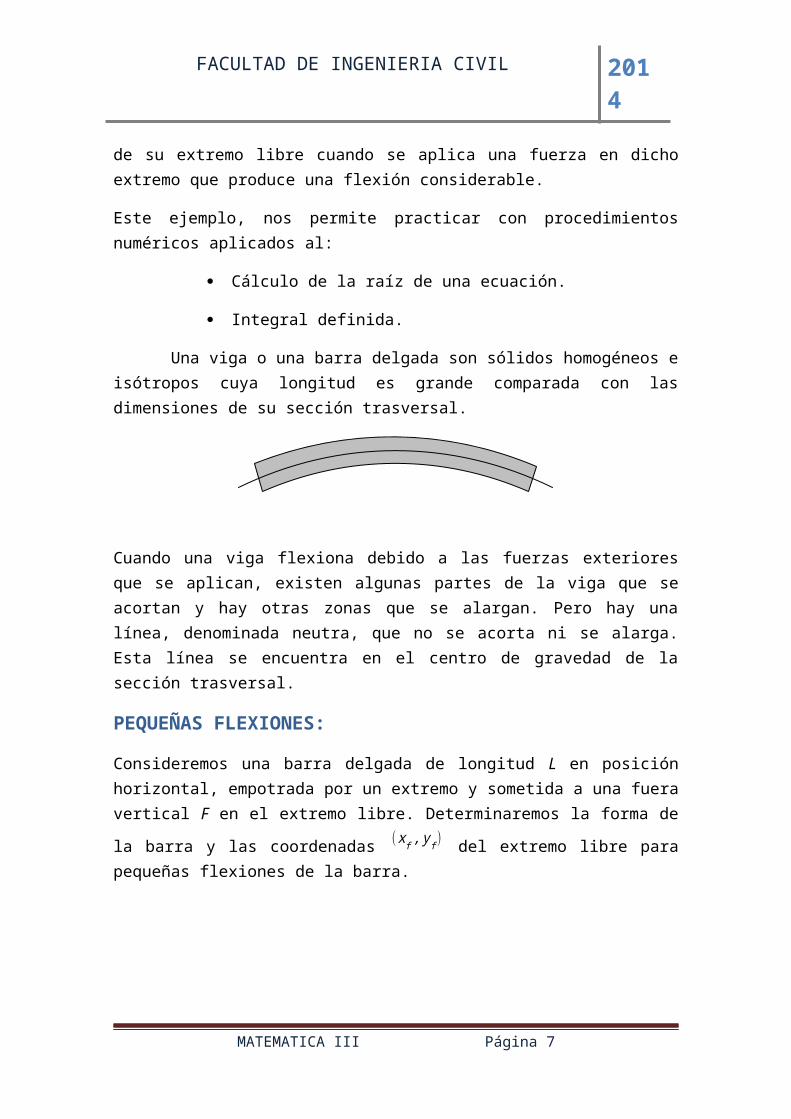
A continuación, examinaremos la teoría de la flexión de una viga en voladizo en detalle, calculando el desplazamiento de su extremo libre cuando se aplica una fuerza en dicho extremo que produce una flexión considerable.
Este ejemplo, nos permite practicar con procedimientos numéricos aplicados al:
Cálculo de la raíz de una ecuación.
Integral definida.
Una viga o una barra delgada son sólidos homogéneos e isótropos cuya longitud es grande comparada con las dimensiones de su sección trasversal.
MATEMATICA III Página 5

FACULTAD DE INGENIERIA CIVIL 2014
Cuando una viga flexiona debido a las fuerzas exteriores que se aplican, existen algunas partes de la viga que se acortan y hay otras zonas que se alargan. Pero hay una línea, denominada neutra, que no se acorta ni se alarga. Esta línea se encuentra en el centro de gravedad de la sección trasversal.
PEQUEÑAS FLEXIONES:
Consideremos una barra delgada de longitud L en posición horizontal, empotrada por un extremo y sometida a una fuera vertical F en el extremo libre. Determinaremos la
forma de la barra y las coordenadas ( xf , y f ) del extremo libre para pequeñas flexiones de la barra.
P
y
x
fy
fxX
Y
b
a
Sección transversal
F
Supondremos que
La barra tiene una longitud L mucho mayor que las dimensiones de su sección trasversal, y que la deformación debida a su propio peso es despreciable.
Que la sección de la barra no cambia cuando se dobla. Cuando el espesor de la barra es pequeño comparado con el radio de curvatura, la sección trasversal cambia muy poco.
Que en estas condiciones es aplicable la ecuación de Euler-Bernoulli que relaciona el momento flector M de la fuerza aplicada y el radio de curvatura de la barra deformada
Y IM
El radio de curvatura de una función ( )y x es:
MATEMATICA III Página 6
FACULTAD DE INGENIERIA CIVIL 2014
32 2
2
2
1dydxds
d yddx
Para pequeñas pendientes 2 0dy
dx
2
2
1 d y
dx
Si despreciamos el peso de la propia barra, el momento de la fuerza F aplicada en el
extremo libre, respecto del punto P (x, y) es M=F ( x f , x )≈F (L , x )
Que integramos dos veces con las siguientes condiciones iniciales:
0, 0, 0dy
x ydx
3 2 32 3
2 3 6
FL x FLx Fxy x
YI L YI
Luego
El desplazamientoy f del extremo libre x L es proporcional a la fuerza F aplicada
Y es el módulo de Young del material.
I se denomina momento de inercia de la sección trasversal respecto de la fibra neutra.
MATEMATICA III Página 7

FACULTAD DE INGENIERIA CIVIL 2014
Se considera que la aproximación de pequeñas flexiones: el desplazamiento y del extremo libre de la barra, es proporcional a la fuerza F aplicada, produce resultados
aceptables hasta un cierto valor del parámetro adimensional 0.375 , (véase al final del siguiente apartado) o bien, hasta un valor máximo de la fuerza aplicada
22 /mF Y I L
ESTUDIO DE LA FLEXIÓN DE UNA VIGA EN VOLADIZO
Consideremos una barra delgada de longitud L en posición horizontal, empotrada por un extremo y sometida a una fuera vertical F en el extremo libre. Determinaremos la forma de la barra y las coordenadas (xf, yf) del extremo libre para grandes flexiones de la barra.
fx
fy
X
YF
Supondremos que
La barra tiene una longitud L mucho mayor que las dimensiones de su sección trasversal, y que la deformación debida a su propio peso es despreciable.
Que la sección de la barra no cambia cuando se dobla. Cuando el espesor de la barra es pequeño comparado con el radio de curvatura, la sección trasversal cambia muy poco.
Que en estas condiciones es aplicable la ecuación de Euler-Bernoulli que relaciona el momento flector M de la fuerza aplicada y el radio de curvatura ρ de la barra deformada
MATEMATICA III Página 8

FACULTAD DE INGENIERIA CIVIL 2014
Donde Y es el módulo de Young del material e I es el momento de inercia de la sección trasversal respecto del eje neutro.
El radio de curvatura
ds
d
d M
ds Y I
fx
fy
X
YF
0
s x
y
dy
ds
dx
El momento flector M de la fuerza F aplicada en el extremo libre de la barra respecto
del punto P (x, y) es ( )fM F x x
Derivando con respecto a “s”, y teniendo en cuanta que:
dxCos
ds
,
2
20
d FCos
ds Y I
Para determinar ( )s se resuelve la ecuación diferencial con las siguientes condiciones iniciales:
Para obtener una solución de la ecuación diferencial, multiplicamos por dφ/ds la ecuación diferencial
MATEMATICA III Página 9

FACULTAD DE INGENIERIA CIVIL 2014
2
20
d d F dCos
ds ds Y I ds
21
02
d d FSen
ds ds Y I
21
2
d FSen k
ds Y I
, k es una constante
La constante de integración la determinamos a partir de las condiciones iniciales especificadas anteriormente
2
0
2d FSen Sen
ds Y I
02
Y I dds
F Sen Sen
La Longitud L de la barra y las coordenadas x e y de cada uno de los puntos de la misma se obtienen por:
0 0
0 00
2
Y I dL ds L
F Sen Sen
00
2
Cos dY Idx ds Cos x
F Sen Sen
0 0
2Y Ix Sen Sen Sen
F
00
2
Sen dY Idy ds Sen y
F Sen Sen
MATEMATICA III Página 10

FACULTAD DE INGENIERIA CIVIL 2014
0 0
0 00
2
Y I dL ds x
F Sen Sen
Dada la fuerza F aplicada en el extremo libre de la barra y conocida la longitud L de la
barra, se resuelve la primera ecuación para calcular el ángulo 0 , que forma la recta tangente a la barra en su extremo libre con la parte negativa del eje horizontal X
Una vez que se conoce este ángulo 0 , se calcula la abscisa x dando valores al ángulo
φ en el intervalo 0(0, ) .
El cálculo de la ordenada y es más complicado, ya que para cada valor del ángulo
hay que hallar una integral definida en el intervalo (0, ) empleando procedimientos numéricos.
CÁLCULO NUMÉRICO
Las ecuaciones anteriores las podemos expresar
02
00
2 ,2
d FL
Y ISen Sen
0 0
1xSen Sen Sen
L
00
1
2
y Sen d
L Sen Sen
Donde es un parámetro adimensional que engloba las características geométricas de la barra, del material del que está hecha, y de la fuerza aplicada en su extremo libre
CÁLCULO DE 0 .
Empezamos con la primera ecuación que nos determina el ángulo 0 que forma la recta tangente a la barra en su extremo libre con la parte negativa del eje horizontal X, tal como se ve en la figura:
MATEMATICA III Página 11

FACULTAD DE INGENIERIA CIVIL 2014
fx
fy
X
YF
0
s x
y
dy
ds
dx
Requiere dos pasos:
1. Hallar la integral
0
00
d
Sen Sen
2. Calcular la raíz de la ecuación
0 0f
La integral se puede expresar en términos de la suma de dos integrales elípticas de
primera especie, haciendo cambios de variable. El primer cambio es 2
2
02 ( , 2) ( , ) 2 ,2
FLE k E k
YI
0 0 2
0 20
0 2
d d
Sen SenCos Cos
0 2
22 20
1
2
2 4 2
d
Sen Sen
El segundo cambio de variable es
02
,2 4
SenSen k Sen
k
MATEMATICA III Página 12

FACULTAD DE INGENIERIA CIVIL 2014
2 2
2
1
k Cos dd
k Sen
Luego tenemos
0
0
2
2 200
21
d d
Sen Sen k Sen
02
02 2 2 20 0
42 ,
1 1
Send dSen
kk Sen k Sen
Finalmente, calculamos la raíz de la ecuación
2
02 ( , 2) ( , ) 2 ,2
FLE k E k
Y I
CÁLCULO DE LAS COORDENADAS (X/L, Y/L) DE CADA PUNTO DE LA BARRA DEFORMADA
El cálculo de x L no reviste dificultad alguna. Conocido 0 , se calcula x L para cada
ángulo φ en el intervalo 00, . La posición fx del extremo libre es:
0
1fx SenL
El cálculo de y L es más problemático. Conocido 0 , se determina la ordenada y L
para cada ángulo φ en el intervalo 00, calculando la integral definida,
00
1
2
Sen dy
L Sen Sen
por el procedimiento numérico de Simpson
MATEMATICA III Página 13

FACULTAD DE INGENIERIA CIVIL 2014
Cuando 0 el denominador de la integral tiende a cero. El ordenador no calcula
correctamente la ordenada fy L del extremo libre de la barra cuando 0 . Para solucionar este inconveniente, empleamos el procedimiento de interpolación que se muestra en la figura.
fx
fy
X
YF
0
L
0
x
y
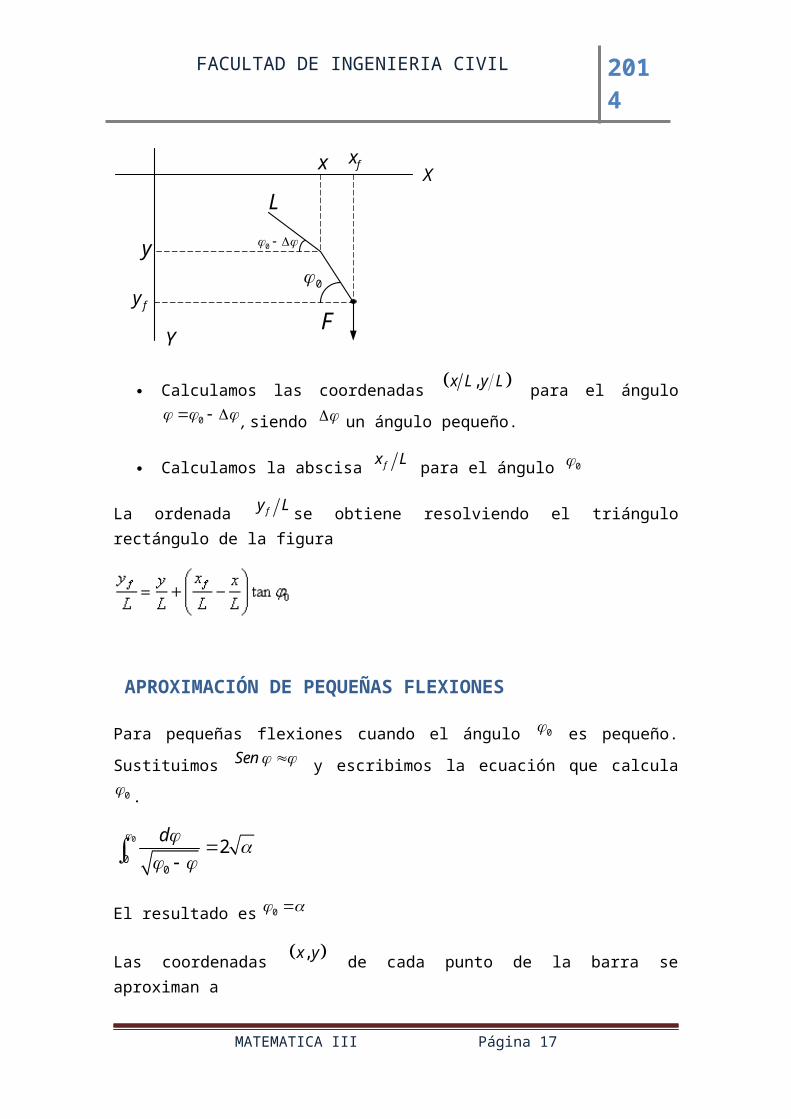
Calculamos las coordenadas ,x L y L para el ángulo 0 , siendo un ángulo pequeño.
Calculamos la abscisa fx L para el ángulo 0
La ordenada fy L se obtiene resolviendo el triángulo rectángulo de la figura
APROXIMACIÓN DE PEQUEÑAS FLEXIONES
Para pequeñas flexiones cuando el ángulo 0 es pequeño. Sustituimos Sen y
escribimos la ecuación que calcula 0 .
0
00
2d
El resultado es 0
MATEMATICA III Página 14

FACULTAD DE INGENIERIA CIVIL 2014
Las coordenadas ,x y de cada punto de la barra se aproximan a
Para el extremo libre de la barra, cuando 0 , fx L , lo que implica que en la aproximación de pequeñas flexiones, no hay desplazamiento horizontal del extremo libre de la barra.
La ordenada y la podemos aproximar
0
1
2
dy
L
Integrando por partes y después de hacer algunas simplificaciones obtenemos la siguiente expresión:
21
3 2
y
L
Las coordenadas x e y , las hemos expresado en función del parámetro , eliminando el parámetro obtenemos la función y=f(x) que describe la flexión de la barra cuando se aplica una fuerza F en su extremo libre.
2 3
2 3
1
3
y x x
L L L
32
32 3
FL xy x
Y I L
Para el extremos libre de la barra, cuando 0 , x L ,
2
3fy
L
,
31
3f
Ly F
Y I
LÍMITE DE LA APROXIMACIÓN DE PEQUEÑAS FLEXIONES
En la figura 12, se muestra la desviación y L del extremo libre de la barra en función del parámetro adimensional α.
MATEMATICA III Página 15

FACULTAD DE INGENIERIA CIVIL 2014
En color rojo, los resultados del cálculo, empleando procedimientos numéricos, descrito en el apartado anterior
En color azul, la recta y L =2α/3, aproximación de pequeñas flexiones
0 , 2 5 0 , 5 0 0 , 7 5 1, 0
0 , 2
0 , 4
0 , 6
0 , 8
1, 0Y
Podemos considerar, que la aproximación lineal produce resultados aceptables hasta
un cierto valor límite del parámetro m o bien, hasta un cierto valor máximo de la
fuerza aplicada mF en el extremo libre de la barra
2
2 mm
Y IF
L
MODELACIÓN CON ECUACIONES DIFERENCIALES DE ORDEN SUPERIOR
Con frecuencia, la descripción matemática de un sistema físico requiere la solución de una ecuación diferencial sujeta a condiciones en la frontera; es decir condiciones especificadas para la función desconocida o una de sus derivadas, e incluso para una combinación de la función desconocida y una de sus derivadas, en dos o más puntos distintos.
Desviación de una viga.- Muchas estructuras se construyen a base de vigas que se desvían o distorsionan por su propio peso o por la influencia de alguna fuerza externa. Pues ahora estudiaremos esta desviación:
MATEMATICA III Página 16
FACULTAD DE INGENIERIA CIVIL 2014
Consideremos dicha desviación por ( )y x la misma que esta determinada por una ecuación diferencial lineal de cuarto orden.
Asumiendo que una viga de longitud L es homogénea y tiene sección transversal uniforme en toda su longitud. Cuando no recibe carga alguna, incluyendo su propio peso, la curva que une los centroides de sus secciones transversales es una recta que se llama eje de simetría.
F
I
x
x
Si a la viga se le aplica una carga en un plano vertical que contenga que contenga al eje de simetría, sufre una distorsión y la curva que une los centroides de las secciones transversales se llama curva de desviación, curva elástica, o simplemente elástica. La elástica aproxima la forma de la viga. Supongamos que el eje x coincide con el eje de
simetría y que la desviación (o flecha) ( )y x , medida desde el eje, es positiva si es hacia abajo. En teoría de la elasticidad se demuestra que el momento flexionante ( )M x en un punto x a lo largo de la viga, se relaciona con la carga por unidad de
longitud ( )w x mediante la siguiente ecuación:
2
2( )
d Mw x
dx
1( )
Además el momento flexionante ( )M x es proporcional a la curva, , de la elástica:
( )M x EI
Donde E e I son constantes, E es el módulo de Young de elasticidad del material de la viga e I es el momento de inercia de la sección transversal de ésta (respecto de un eje llamado eje neutro). El producto EZ se denomina rigidez a la flexión de la viga.
De acuerdo al cálculo diferencial, la curvatura es:
MATEMATICA III Página 17

FACULTAD DE INGENIERIA CIVIL 2014
32 2
''
1 ( ')
y
y
2( )
Cuando la desviación ( )y x es pequeña es pequeña, la pendiente ' 0y , de modo que:
32 21 ( ') 1y
Si ''y , entonces el momento flexionante se transforma en ''M EIy .
La segunda derivada de esta ecuación es:
2 2 4
2 2 4''
d M d d yEI y EI
dx dx dx
3( )
Remplazando resultado de 1( ) en 3( ) y vemos que la desviación ( )y x satisface la siguiente ecuación diferencial:
4
4( )
d yEI w x
dx
4( )
Las condiciones en la frontera asociados a esta ecuación dependen de la forma en que están sostenidos los extremos de la viga. Una viga en voladizo (en cantiliver) está empotrada en un extremo y libre en el otro. El ala de un avión, un brazo extendido, las astas de banderas, los rascacielos son ejemplos comunes de vigas en voladizo y los momentos pueden trabajar como vigas en voladizo, ya que están empotrados en su base y sufren la fuerza del viento, que los tiende a flexionar. Para una viga en voladizo,
la desviación ( )y x debe satisfacer las dos condiciones siguientes en el extremo
empotrado en 0x :
a) (0) 0y , porque no hay desviación en ese lugar, y
b) '(0) 0y , porque la curva de desviación es tangente al eje x (es decir, la pendiente de la curva de desviación es cero en ese punto).
Cuando x L las condiciones del extremo libre son:
a) ''( ) 0y L , porque el momento flexionante es cero
MATEMATICA III Página 18

FACULTAD DE INGENIERIA CIVIL 2014
b) '''( ) 0y L , porque la fuerza cortante es cero.
La función:
3
3( )
dM d yF x EI
dx dx
5( )
Se llama fuerza cortante. Si un extremo de una viga está simplemente apoyado ( a
esto también se le llama articulado o empernado), se debe cumplir que (0) 0y y ''(0) 0y en ese extremo.
A continuación se muestra una tabla de las condiciones en la frontera asociadas con la
ecuación 4( ) :
Extremos de
La viga
Condiciones en
La frontera
Empotrado (0) 0y , '(0) 0y
Libre ''(0) 0y , '''(0) 0y
Simplemente apoyado
(0) 0y , ''(0) 0y
MATEMATICA III Página 19

FACULTAD DE INGENIERIA CIVIL 2014
EJEMPLO: VIGA EMPOTRADA.
Una viga de longitud L está empotrada en ambos extremos. Determine la
desviación de esa viga si sostiene una carga constante, 0w , uniformemente distribuida
en su longitud; esto es 0( )w x w , 0 x L .
Solución
Según lo que acabamos de plantear; la desviación ( )y x satisface a
4
04
d yEI w
dx
6( )
Dado que la viga está empotrada en su extremo izquierdo ( 0x ) y en su extremo
derecho ( )x L , no hay desviación vertical y la elástica es horizontal e esos puntos. De esta manera las condiciones en la frontera son:
(0) 0, '(0) 0, ( ) 0, '( ) 0y y y L y L
Podemos resolver determinando cy teniendo en cuenta que 0m es una raíz de
multiplicidad cuatro de la ecuación auxiliar 4 0m , luego determinamos una solución
particular py por el método de coeficientes indeterminados. También podemos resolver integrando cuatro la ecuación:
40
4
wd y
dx EI
7( )
Se obtiene como solución general:
2 3 401 2 3 4( )
24
wy x c c x c x c x x
EI
8( )
Con las condiciones (0) 0, '(0) 0y y se obtiene 1 20 0c y c ,
MATEMATICA III Página 20

FACULTAD DE INGENIERIA CIVIL 2014
Sin embargo las otras condiciones restantes ( ) 0, '( ) 0y L y L aplicados a la ecuación:
2 3 403 4( )
24
wy x c x c x x
EI
9( )
Dan origen a:
2 3 403 4
2 303 4
024
2 3 06
wc L c L L
EIw
c L c L LEI
10( )
Resolviendo el sistema 10( ) se obtiene:
20 0
3 424 12
w L w Lc y c
EI EI
11( )
En consecuencia la desviación es:
2
22 3 4 20 0 0 0( )24 12 24 24
w L w L w wy x x x x x x L
EI EI EI EI
12( )
Si 0 24 1w EI L , se obtiene la gráfica de la curva elástica de la figura 14
CURVATURA DE UNA COLUMNA VERTICAL ESBELTA.
MATEMATICA III Página 21
FACULTAD DE INGENIERIA CIVIL 2014
En el siglo XVIII Leonhard Euler fue uno de los primeros matemáticos en estudiar un problema de valores propios al analizar cómo se curva una columna elástica esbelta sometida a una fuerza axial de compresión.
Examinando una columna vertical larga y esbelta de sección transversal uniforme y
longitud L . Sea ( )y x la curvatura de la columna al aplicarle una fuerza vertical de compresión, o carga P , en su extremo superior ver Figura 15. Al comparar los momentos flexionantes en cualquier punto de la columna se obtiene:
2
2
d yEI Py
dx
Es decir
2
20
d yEI Py
dx
Donde E es el módulo de elasticidad de Young e I es el momento de inercia de una sección transversal con respecto a una recta vertical por el centroide.
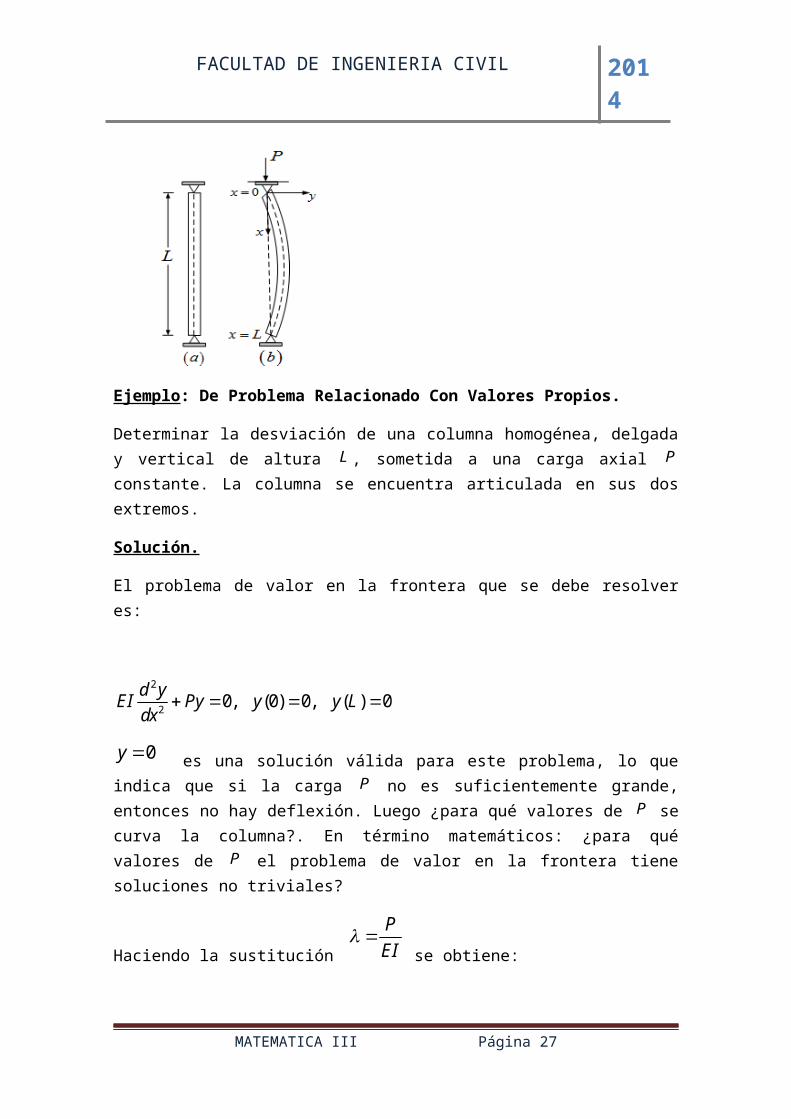
Ejemplo: De Problema Relacionado Con Valores Propios.
Determinar la desviación de una columna homogénea, delgada y vertical de altura L , sometida a una carga axial P constante. La columna se encuentra articulada en sus dos extremos.
Solución.
El problema de valor en la frontera que se debe resolver es:
MATEMATICA III Página 22

FACULTAD DE INGENIERIA CIVIL 2014
2
20, (0) 0, ( ) 0
d yEI Py y y L
dx
0y es una solución válida para este problema, lo que indica que si la carga P no es suficientemente grande, entonces no hay deflexión. Luego ¿para qué valores de P se curva la columna?. En término matemáticos: ¿para qué valores de P el problema de valor en la frontera tiene soluciones no triviales?
Haciendo la sustitución
P
EI
se obtiene:
'' 0, (0) 0, ( ) 0y y y y L
Es idéntica al problema de soluciones no triviales de un problema de valor en la frontera, en el caso III de este problema se observa que las curvas de desviación son:
2( )n
n xy x c Sen
L
, que corresponden a los valores propios
2 2
2, 1, 2,3,...n
n
P nn
EI L
Esto quiere decir físicamente, que la columna se desvía sólo cuando la fuerza de
compresión tiene uno de los valores
2 2
2, 1, 2,3,...n
n EIP n
L
Estas fuerzas se llaman cargas críticas. La curva de deflexión que corresponde a la
mínima carga crítica,
2
1 2
EIP
L
se denomina carga de Euler y es
1 2( )x
y x c SenL
; esta función se conoce como primer modo de desviación.
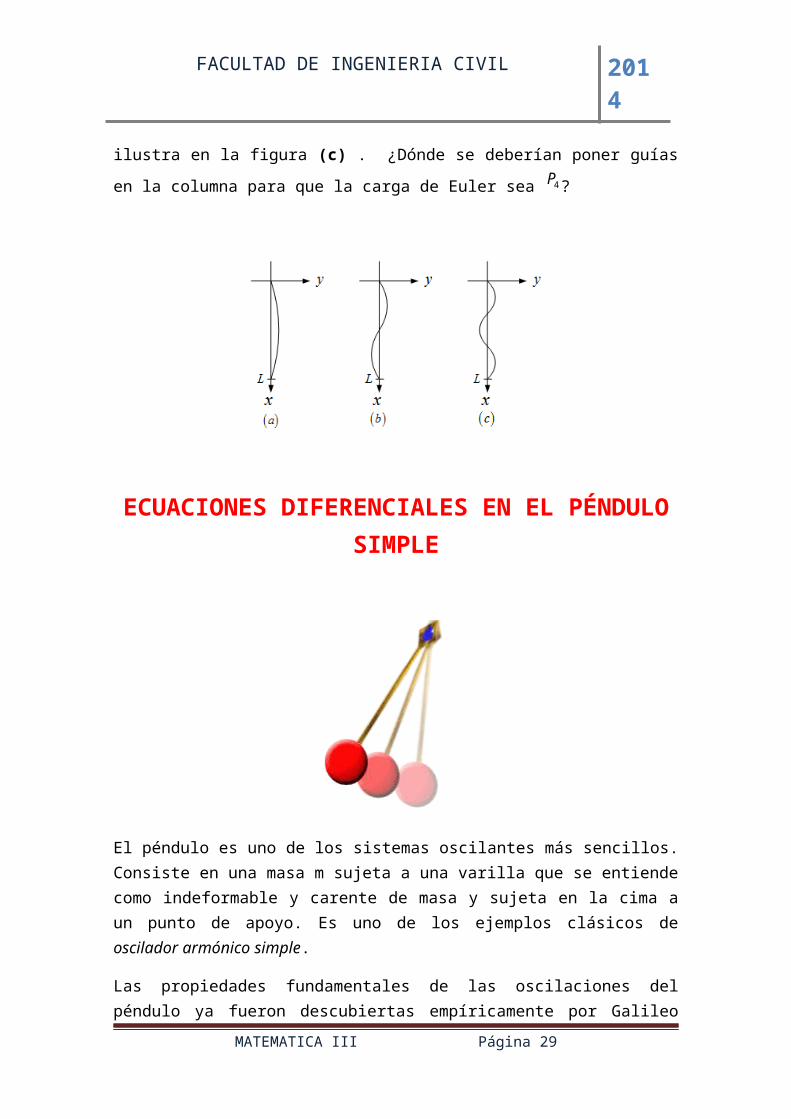
En la siguiente figura vemos las curvas de desviación del presente ejemplo, que
corresponden para 1, 2 3n n y n . Si la columna original tiene algún tipo de
MATEMATICA III Página 23

FACULTAD DE INGENIERIA CIVIL 2014
restricción física o guía en 2
Lx
, la carga crítica mínima será
2
2 2
4 EIP
L
, y la curva
de deflexión será la de la figura(b). Si ponen guías a las columnas en 3
Lx
y en
2
3
Lx
, la columna no se desviará sino hasta aplicarle la carga crítica
2
3 2
9 EIP
L
y la curva de desviación será la que se ilustra en la figura (c) . ¿Dónde se deberían poner
guías en la columna para que la carga de Euler sea 4P ?
ECUACIONES DIFERENCIALES EN EL PÉNDULO SIMPLE
El péndulo es uno de los sistemas oscilantes más sencillos. Consiste en una masa m sujeta a una varilla que se entiende como indeformable y carente de masa y sujeta en la cima a un punto de apoyo. Es uno de los ejemplos clásicos de oscilador armónico simple.
MATEMATICA III Página 24

FACULTAD DE INGENIERIA CIVIL 2014
Las propiedades fundamentales de las oscilaciones del péndulo ya fueron descubiertas empíricamente por Galileo Galilei. En 1581, mientras estudiaba medicina en la Universidad de Pisa, Galileo con frecuencia atendía las liturgias en la Catedral de Pisa. En cierta ocasión observó cómo las corrientes de aire de la catedral hacían oscilar los enormes candelabros colgados que había en la catedral. La amplitud de las oscilaciones era distinta y sin embargo a Galileo le pareció que el período era el mismo. Inmediatamente se puso a medirlo utilizando su ritmo cardíaco como reloj y al ver que estaba en lo cierto, decidió realizar un experimento riguroso al volver a su casa, llegando a las siguientes conclusiones:
Los péndulos casi alcanzan la altura inicial desde la que fueron dejados caer
Todos los péndulos eventualmente se detienen
El período del péndulo es independiente de la masa que oscila
El período del péndulo es independiente de la amplitud
El cuadrado del período es proporcional a la longitud del péndulo.
Supongamos que en un momento determinado el péndulo está desviado respecto al eje de reposo (el eje vertical) un ángulo α. Veamos el razonamiento que se aplica para determinar las fuerzas que actúan en el sistema.
En primer lugar está claro que sobre la masa actúa la fuerza de la gravedad, dirigía hacia abajo:
La fuerza de la gravedad, además, es igual según la segunda ley de Newton a G = mg .
Sin embargo, como está unida la bola a una varilla no se desplaza hacia bajo y la fuerza gravedad se descompone en dos componentes perpendiculares una de la otra. Al descomponemos la fuerza de la gravedad como suma de los siguientes dos vectores:
MATEMATICA III Página 25

FACULTAD DE INGENIERIA CIVIL 2014
Utilizando esta descomposición, tenemos una fuerza que es perpendicular a la
varilla y una fuerza que es paralela a la varilla e intenta alejar a la bola justo en dirección opuesta a la varilla. Puesto que la masa está unida a la varilla, esta fuerza se transmite íntegramente sobre la varilla, es decir, que la masa por acción de la gravedad "tira" del extremo de la varilla intentando escaparse. Sin embargo como la varilla es indeformable, es decir, no se puede estirar ni acortar, por lo que ejerce una fuerza en sentido contrario a la masa que equilibra esta parte de la fuerza de la gravedad. A esta fuerza habitualmente se la denota con T y se la denomina "tensión" (no la tensión de la electricidad, sino la del verbo tensar). Con esta fuerza, nuestro sistema queda como sigue:
Como única fuerza descompensada queda por lo tanto , que es la que hace que el péndulo intente volver hacia el eje vertical. Puesto que la varilla fuerza a la masa a moverse a lo largo de una circunferencia con un radio igual a la longitud de la varia,
es realmente una fuerza que actúa tangencialmente:
MATEMATICA III Página 26
FACULTAD DE INGENIERIA CIVIL 2014
Por desgracia a partir de este punto es necesario recurrir a derivadas para deducir las ecuaciones del movimiento.
Nota. En el punto en el que la varilla es paralela al eje vertical la fuerza perpendicular es cero pero el movimiento continuo debido a la fuerza centrífuga pero no incluiremos esto en el modelo.
Si calculamos la magnitud de esta aceleración podremos ver que se cumple:
Donde es la segunda derivada del ángulo respecto al tiempo, o lo que es lo mismo, la aceleración angular.
Esto es una Ecuación Diferencial cuya solución analítica es muy superior al nivel de este artículo (sin embargo, si te interesa puedes mirar en el artículo de nivel avanzado sobre el mismo tema), por lo que es necesario recurrir a lo que se conoce como aproximación de pequeños ángulos. Bajo esta aproximación, podemos decir que:
Con lo cual nuestra ecuación se queda en :
Básicamente buscamos una función α(t) que cumpla esa relación. Una función de este tipo es la siguiente:
MATEMATICA III Página 27

FACULTAD DE INGENIERIA CIVIL 2014
Se puede comprobar que efectivamente:
Que es precisamente la ecuación que teníamos.
Para ver lo que significa la magnitud , recordemos que el período de la función seno es 2π. Entonces si llamamos a T al instante en que se cumple ese período tenemos:
O lo que es lo mismo,
Se puede así llegar a las mismas conclusiones que Galileo, concretamente
El período del péndulo es independiente de la masa que oscila (ya que sólo depende de g y de r)
El período del péndulo es independiente de la amplitud (id.)
El cuadrado del período es proporcional a la longitud del péndulo.
MATEMATICA III Página 28
FACULTAD DE INGENIERIA CIVIL 2014
En efecto,
El término de la derecha es precisamente la definición de frecuencia angular ω, con lo que :
Si quisiéramos considerar un modelo más complicado, observemos rápidamente el modelo del péndulo compuesto:
Fundamentos físicos
El péndulo compuesto es un sólido en rotación alrededor de un eje fijo.
Cuando se separa un ángulo q de la posición de equilibrio y se suelta, sobre el sólido actúa el momento del peso, que tiene signo contrario al desplazamiento.
La ecuación de la dinámica de rotación se escribe
IOa =-mgbsenq
Donde b es la distancia entre el centro de masa y el centro de oscilación O.
Expresamos la ecuación de la dinámica de rotación en forma de ecuación diferencial
Esta no es la ecuación diferencial de un Movimiento Armónico Simple. Si la amplitud es pequeña podemos aproximar el seno del ángulo al ángulo medido en radianes. La ecuación diferencial se escribe entonces
MATEMATICA III Página 29

FACULTAD DE INGENIERIA CIVIL 2014
Esta si es ya la ecuación diferencial de un M.A.S. de frecuencia angular
Por el teorema de Steiner :
IO=IC+mb2
El periodo se escribe:
Cuando se representa P en función de b. Aparecen dos curvas simétricas con respecto a la posición de centro de masas. El periodo alcanza un valor infinito para b=0, es decir, cuando coincide el centro de masa con el centro de oscilación O. La curva presenta un mínimo para un cierto valor de b que se puede calcular derivando P respecto de b e igualando a cero.
Dado un valor de P podemos hallar los dos valores de b que hacen que el péndulo compuesto oscile con dicho periodo.
Para obtener estos valores, escribimos IC=mR2 de modo que podemos simplificar la masa m en la fórmula del periodo y a continuación, elevamos al cuadrado la fórmula del periodo:
De las propiedades de las soluciones de la ecuación de segundo grado
Midiendo en la gráfica b1 y b2 para un valor dado de P, obtenemos el valor de la aceleración de la gravedad g. También podemos obtener el momento de inercia del
MATEMATICA III Página 30

FACULTAD DE INGENIERIA CIVIL 2014
péndulo compuesto respecto a un eje que pasa por el centro de masa, pesando en una balanza el péndulo y calculando R2 mediante el producto de b1 por b2.
IC=mR2
CONCLUSIONES
Dentro de la ingeniería civil, siempre van a existir problemas cuya solución deberá se mediante el uso de ecuaciones diferenciales, por esto es necesario tener presente la manera correcta de cómo aplicar y desarrollar estas ecuaciones, pues de eso dependerá el análisis del elemento estructural que hagamos.
Cabe mencionar también que las ecuaciones diferenciales no solamente se aplican en VIGAS sino también en otros campos de estudio, como es el caso del PENDULO SIMPLE.
Para concluir con este trabajo se puede hacer referencia al valor que cobra la investigación como proceso de aprendizaje, este es un proceso
MATEMATICA III Página 31

FACULTAD DE INGENIERIA CIVIL 2014
meramente humano que se busca fortalecer la información que posee la persona, es por ello que este trabajo ha sido desarrollada a base de esto, la información presentada aquí sea aprovechable por mis compañeros y público en general.
BIBLIOGRAFÍA
Jan J. Tuma Ph. D: Teoría y problemas de Análisis Estructructural. Jeffery P.Laible : Análisis Estructural. Robert L. Borrelli: Ecuaciones Diferenciales una Perspectiva. Roussel C. Hibbeler : Análisis Estructural. Roussel C. Hibbeler: Ingeniería Mecánica - Estática
MATEMATICA III Página 32