velocity acceleration motion at constant acceleration “euclid taught me that without assumptions...
TRANSCRIPT
Velocity
Acceleration
Motion at Constant Acceleration
“Euclid taught me that without assumptions there is no proof. Therefore, in any argument, examine the assumptions.”—mathematician Eric Bell

In contrast to loose usage in “everyday life,” speed and velocity have precise definitions in physics.
Average speed is defined by
Average velocity is defined by
Do you see the difference?
(average speed) = (distance traveled along a path during elapsed
time)/(elapsed time).
(average velocity) = (displacement during elapsed time)/(elapsed time).
2.2 Average Velocity
A runner who travels once around an oval 400 meter track in one minute has run with an average speed
Savg = 400 m / 60 s = 6.7 m/s.
The runner’s average velocity is
Vavg = 0 m / 60 s = 0 m/s.
This example makes average velocity look like a silly thing to calculate, but we will find that velocity is generally much more useful than speed.

Mathematically,
2 1x
2 1
x - x xv = =
t - t t
The bar above the v means “average.” The subscript “x” on the v is very important. It reminds us of the direction we have chosen to be positive. It also reminds us that velocity is a vector quantity.
Average velocity may also be written as vavg,x .

A note on notation and vector components: Giancoli follows the usual Physics convention for 1-dimensional kinematics and writes v for velocity.
When he goes to 2 dimensions, he uses subscripts x and y, e.g., vx and vy, to denote the x- and y-components of velocity.The neglect of the subscript for one dimension is potentially confusing.
Velocity is a vector and has both magnitude and direction.By convention, a “regular” (not bold, no arrow above) symbol stands for a scalar.

Sometimes physicists use “v” to mean “the magnitude of the velocity vector. Sometimes they use it to mean “the velocity vector in one dimension.” Two different things !You would think physicists would be more careful to say precisely what they mean.
Remember: vx has both a numerical value and a sign “buried” in it. The sign tells whether vx is directed along the +x or –x direction.
You would think physicists would be more careful to say precisely what they mean. But we physicists tend to think alike, and take shortcuts that we believe everybody should understand.
This may seem trivial now, but more complex problems will demand correctness in all details.

Instantaneous velocity is defined as the average velocity over an infinitesimal (very small) time interval:
0 .
x t
xv = lim
t
If you have taken calculus, you can see that the instantaneous velocity is just the derivative of position with respect to time. (Don’t worry, you don’t need to know that for this class.)
The OSE sheet contains the 3-dimensional version:
0 .
t
rOSE v = lim
t
Remember, this component form of the OSE can be used as an OSE.
2.3 Instantaneous Velocity

Speed and velocity (again).
Instantaneous speed is just the magnitude of the instantaneous velocity vector:
.xv = speed = v
We’ll be doing plenty of problems involving velocity soon enough, so I’ll hold off on examples for a bit.
Average acceleration is defined by
(average acceleration) = (change of velocity) /(elapsed time).
Mathematically,
x2 x1 xx
2 1
v - v va = =
t - t t
As you might suspect, instantaneous acceleration is defined by
0 .
t
vOSE a = lim
t
0
, or
xx t
va = lim
t
2.4 Acceleration

Conceptual example 2-4. (a) If the velocity of an object is zero does it mean that the acceleration is zero? (b) If the acceleration is zero, does it mean that the velocity is zero? Give examples.
Well…?
Negative acceleration means the direction of the acceleration vector is in the negative x-direction.* A car could have negative acceleration and be speeding up.Deceleration means the object is slowing down, but does not necessarily mean that acceleration is negative.
*In one dimension, axis called “x-axis.”
Negative acceleration means the direction of the acceleration vector is in the negative x-direction.*
Well…? You don’t expect me to give all the answers, do you?
Deceleration means the object is slowing down, but does not necessarily mean that acceleration is negative. It means that the magnitude of the acceleration is decreasing. Again—sign depends on your choice of axes.

A “better” way to think of acceleration:
0 .
t
va = lim
t
An acceleration gives rise to a change in velocity.
We’ll be doing plenty of problems involving acceleration soon enough, so I’ll again hold off on examples for a bit.

If acceleration is constant, the instantaneous and average accelerations are equal, and motion is said to be “uniformly accelerated motion.”
It is not too difficult to start with our definitions of velocity and acceleration, and derive the following four equations, which are valid if acceleration is constant:
x 0x xv = v + a t
20 0x x
1x = x + v t + a t
2
2 2x 0x x 0v = v + 2a x - x
x 0xx
v + vv =
2
The three boxed equations are “official” and are on your OSE sheet. The other comes from the definition of “average.”
2.5 Motion at Constant Acceleration

The equations describe the motion of an object which has an acceleration ax.
These equations are only valid if acceleration is constant! Do not use them unless you know that is true!
By “official” I mean the equations on the previous slide are the starting point for all your kinematics in one dimension problems!
You can define any convenient coordinate axes, and you may also use “y” (or some other symbol) instead of “x.”

velocity when position is x0
2 2x 0x x 0v = v + 2a x - x
velocity when position is x
acceleration of object between x and x0 (must be constant)
It might be “better” to write
2 21x 0x x 1 0v = v + 2a x - x
but none of the major textbooks write it that way.
A note on notation:
“Should I write 2 2x 0x x 0v = v + 2a x - x
2 2x x0 x 0v = v + 2a x - x ?"or
I’ll accept either. But v0x is better than vx0 because the subscript “x” identifies the symbol as being the x-component of whatever comes before, and by v0x we actually mean the x component of (v0).
It would be technically more correct for me to write
22
x 0 x 0xv = v + 2a x - x
but that’s lots of extra parentheses to keep track of.
Example: starting from a speed v1 at the beginning of a freeway entrance ramp, you want to enter the freeway at a speed v2 at the end of the ramp, which has length L. Calculate the required acceleration. Assume a is constant.If time permits, I’ll work this on the blackboard in class. The following slides show the solution in all its detail.
Litany for Kinematics, step 1: draw a basic representative sketch of the physical situation.
Step 2: draw and label vectors for the relevant dynamical quantities.
Step 3: draw axes, indicating origin & + direction.

Step 4: indicate and label initial and final positions.
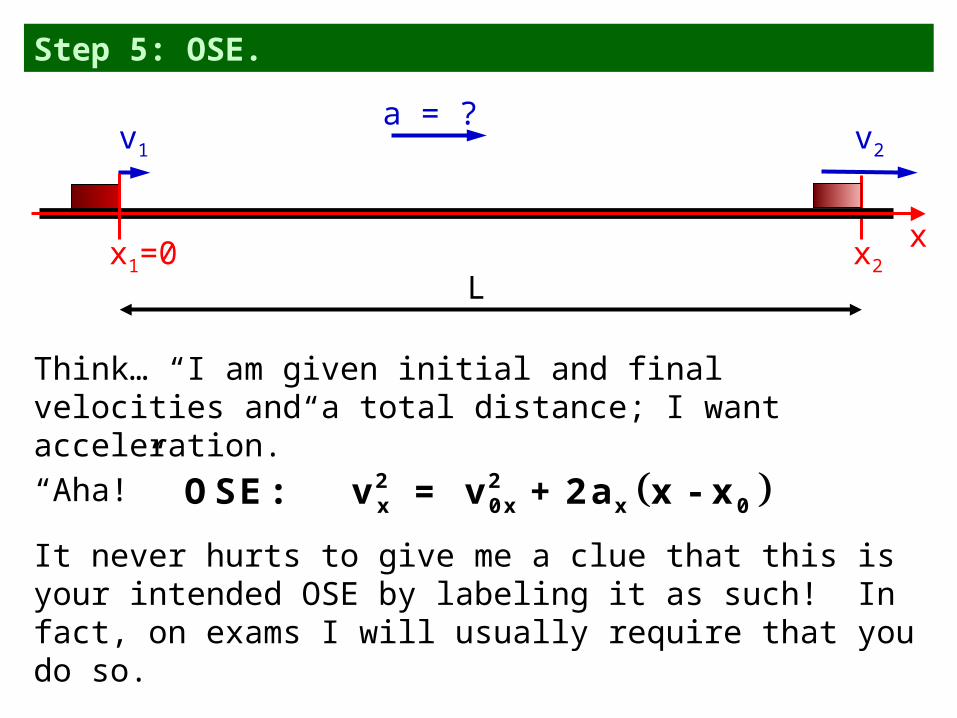
Step 5: OSE.
Step 6: Replace generics with specifics.
Step 7: Solve algebraically.
Step 8: Draw a box around your final answer.
Example: starting from a speed v1 at the beginning of a freeway entrance ramp, you want to enter the freeway at a speed v2 at the end of the ramp, which has length L. Calculate the required acceleration. Assume a is constant.

Example: starting from a speed v1 at the beginning of a freeway entrance ramp, you want to enter the freeway at a speed v2 at the end of the ramp, which has length L. Calculate the required acceleration. Assume a is constant.
Litany for Kinematics, step 1: draw a basic representative sketch of the physical situation.
v1 v2L
end of ramp

Step 2: draw and label vectors for the relevant dynamical quantities.
The labels v1 and v2 below the “car” didn’t help. Also are misleading (vectors?). Wasted time! Dump them.
v1 v2
If you are given that v1 = 0, I do not require that you draw the arrow if you write v1 = 0 next to the object.
You can indicate numerical values of vector magnitudes by the arrow, or put them off to the side. If a value is unknown, you should indicate that with a “?”
L
v1 v2a = ?There’s a reason for not “attaching” the v’s to the object.

Step 3: draw axes, indicating origin & + direction.
L
v1 v2
a = ?
x
Actually, there is nothing in the problem statement that “demands” v1 pointing to the right. (I don’t see how you could “enter” by going away from the entrance, so it makes sense for v2 to be to the right.)
If you have information that tells you the direction of a vector, use it. Otherwise, assume a reasonable direction. If your assumed direction is wrong, your math will tell you.

Step 4: indicate and label initial and final positions.
What about time? No information given about time, maybe we don’t need it; we can always add it later if necessary.It would be a good idea to label the positions with x1=0 and x2=L. You don’t need to if the diagram provides the information. (I wrote x1=0 because it might not be clear the vertical line there indicates x=0.)
L
v1 v2
a = ?
xx1=0 x2
Step 5: OSE.
Think… “I am given initial and final velocities and a total distance; I want acceleration.”
“Aha!” 2 2x 0x x 0OSE: v = v + 2a x - x
It never hurts to give me a clue that this is your intended OSE by labeling it as such! In fact, on exams I will usually require that you do so.
x1=0 x2L
v1 v2
a = ?
x
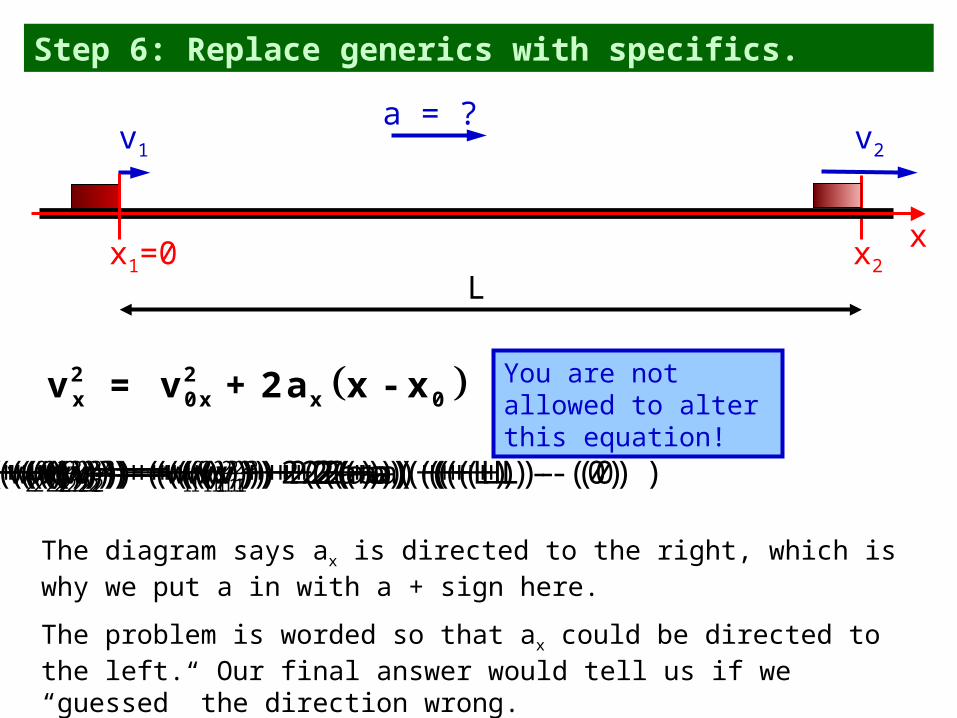
Step 6: Replace generics with specifics.
2 2x 0x x 0v = v + 2a x - x You are not allowed
to alter this equation!
The diagram says ax is directed to the right, which is why we put a in with a + sign here.
The problem is worded so that ax could be directed to the left. Our final answer would tell us if we “guessed” the direction wrong.
++(v22)+(v22) =+(v22) = ++(v22) = +(v1
2)+(v22) = +(v1
2) ++(v22) = +(v1
2) + 2+(v22) = +(v1
2) + 2(+a)+(v22) = +(v1
2) + 2(+a) (+(v22) = +(v1
2) + 2(+a) (++(v22) = +(v1
2) + 2(+a) (+(+L)+(v22) = +(v1
2) + 2(+a) (+(+L) -+(v22) = +(v1
2) + 2(+a) (+(+L) - (0)+(v22) = +(v1
2) + 2(+a) (+(+L) - (0) )
x1=0 x2L
v1 v2
a = ?
x

Step 7: Solve algebraically.
2 22 1+ v = + v + 2 a + L - 0
2 22 1v - v = 2 a L I don’t need all the extra ()’s any
more. Do one plodding step at a time! (I didn’t!)2 2
2 12 a L = v - v
2 22 1v - v
a = 2 L
I assumed that acceleration is to the right.I assumed that acceleration is to the right. Caution!I assumed that acceleration is to the right. Caution! I could give you a problem in which the car slows down.
I assumed that acceleration is to the right. Caution! I could give you a problem in which the car slows down. We’ll soonlearn techniques for handling this.
x1=0 x2L
v1 v2
a = ?
x

Step 8: Draw a box around your final answer.
2 22 1v - v
a = 2 L
“I want numbers! Give me numbers to plug in!”“I want numbers! Give me numbers to plug in!” No you don’t.
“I want numbers! Give me numbers to plug in!” No you don’t. Really.
Done!
x1=0 x2L
v1 v2
a = ?
x

Because you really think you want numbers, I’ll give you some.Starting from a speed of 10 mph at the beginning of a freeway entrance ramp, you want to enter the freeway at a speed of 65 mph at the end of the ramp, which has length of 400 yards. Calculate the required acceleration. Assume constant acceleration.
2 22 1v - v
a = 2 L
2 265 miles 1.61 km 1000 meters hour 10 miles 1.61 km 1000 meters hour
- hour mile km 3600 s hour mile km 3600 sa =
3 feet 1 meter2 400 yards
yard 3.28 feet
2
ma = 1.13
s
Do you have any clue if this is correct or not?
I inverted these when I first did the calculation, but the units showed me my error.
Do you have any clue if this is correct or not? I think the ramp length is quite a bit longer than is typical in “reality.”

“Euclid taught me that without assumptions there is no proof. Therefore, in any argument, examine the assumptions.”—mathematician Eric Bell
Do your remember the quote at the start of this lecture about examining assumptions?
In the solution in these notes, I assumed v1x, v2x and ax are directed towards positive x. I also assumed ax is constant.
If you don’t know the direction a vector component points, leave it in the form vx, ax, etc. in your solution and do not include a sign for assumed direction.

Example: Use the data from the previous example to show that it took 21.8 seconds to accelerate from 10 to 65 mph.
You learn relatively little just by watching me work problems.
If you wished, you could work the problem and see if my calculation of time is correct.