variateur standard dcs pour systèmes d'entraînement...
TRANSCRIPT

Variateur standard DCSpour systèmes d'entraînement c.c.
20 à 820 A9 à 429 kW
ManuelDCS 400

Table des matières
MANUEL1 DCS 400 - le variateur c.c. compact ........... II K 1-1
2 Principaux constituants du DCS 400 ........ II K 2-12.1 Caractéristiques et contraintes d'environnement ......... II K 2-22.2 Modules convertisseurs DCS 400 ............................... II K 2-32.3 Capacités de charge du DCS 400 .............................. II K 2-52.4 Interfaces de commande et de dialogue .................... II K 2-62.5 Mise en réseau du variateur ....................................... II K 2-7
3 Caractéristiques techniques ...................... II K 3-13.1 Dimensions des modules .............................................. II K 3-13.2 Section des câbles et couples de serrage .................... II K 3-33.3 Pertes de puissance ...................................................... II K 3-43.4 Refroidissement du pont de puissance ......................... II K 3-53.5 Carte de commande SDCS-CON-3 .............................. II K 3-63.6 Carte interface de puissance SDCS-PIN-3 ................... II K 3-93.7 Carte d'excitation SDCS-FIS-3 ................................... II K 3-10
4 Présentation du logiciel ............................. II K 4-14.1 Présentation de l'architecture logicielle ......................... II K 4-14.2 Les macro-programmes d'application ........................... II K 4-34.3 Liste complète des paramètres ................................... II K 4-204.4 Basic parameters, sorted by drive mode .................... II K 4-35
5 Installation ................................................... II K 5-15.1 Consignes de sécurité .................................................. II K 5-25.2 Règles pour une installation conforme CEM ................ II K 5-45.3 Exemple de raccordement des signaux logiques et
analogiques à un API .................................................... II K 5-7
6 Exploitation ................................................. II K 6-16.1 Micro-console ................................................................ II K 6-26.2 Configuration assistée avec la micro-console .............. II K 6-6
7 Interfaces série ........................................... II K 7-17.1 Port micro-console ........................................................ II K 7-17.2 Port RS232 .................................................................... II K 7-27.3 Interface réseau de terrain ............................................ II K 7-3
AnnexesAccessoires .............................................................................. II K A
Selfs réseau ..................................................................... II K AFusibles ............................................................................ II K AFiltres CEM ...................................................................... II K A
Déclaration CE de conformité .................................................. II K BMini-guide d'installation et de mise en service ........................ II K CExemples de paramétrage de base ......................................... II K D
II K i

II K 1-1
1 DCS 400 - le variateur c.c. compact
Le DCS 400 marque l'avènement d'une nouvellegénération de variateurs c.c., pour des puissanc-es de 9 à 429 KW et des tensions réseau de 230à 500 V.
Simplicité d'utilisation: telle était l'objectif prior-itaire des concepteurs du variateur. Le résultat: unvariateur c.c. en adéquation totale avec les be-soins des constructeurs de machines, à savoir:
I la simplicité de la technologie analogique avectous les avantages de la technologie numéri-que
I la simplicité d'intégration dans les machines,avec un variateur compact aux fonctionnalitéscomplètes
I la simplicité d'installation et de configuration
Le DCS 400 est un produit innovant, intégrant lesplus récents progrès de la technologie des semi-conducteurs, offrant donc une maintenance plusaisée et une fiabilité accrue, et intégrant unlogiciel avancé pour une configuration plus rapide.
Le faible encombrement du DCS 400 est un atout
supplémentaire pour les constructeurs de ma-chines, leur permettant d'intégrer plusd'accessoires dans un même volume. La compac-ité résulte notamment de l'utilisation d'une carted'excitation entièrement intégrée, incluant le fus-ible et la self.
La technologie des IGBT utilisée pour la carted'excitation nous a permis de supprimer le trans-formateur d'adaptation de la tension d'excitationnormalement requis pour adapter la tensionréseau à celle du moteur.
L'assistant de configuration accessible à la foissur la micro-console et l'outil logiciel PC, simpli-fie la mise en route du variateur, en guidantl'utilisateur pas à pas.
Le DCS 400 contient également des macro-pro-grammes d'application. En sélectionnant un mac-ro-programme du menu, l'utilisateur pré-config-ure son logiciel et ses E/S, offrant un réel gain detemps et moins de risques d'erreur.
Le DCS 400 porte le marquage CE et est conçu etfabriqué sous certification ISO 9001.

II K 1-2
Commande et exploitation
Entrées et sorties analogiques et logiques
Par liaison série (réseau de terrain)
IHM (interface homme-machine) via:
Drive Window Light(outil d'aide à la mise en route et à la mainte-nance) programme PC sous environnementWindows® (3.1x, 95, NT): Paramétrage Diagnostic des défauts Affichage et analyse des valeurs de mesure Pile de défauts
DCS-400-PANMicro-console débrochable avec affichage enclair pour les tâches suivantes: Configuration assistée Paramétrage Détection des défauts Affichage des valeurs de référence et demesure Exploitation en commande locale
Fonctionnalités
Commande des moteurs Générateur de rampes de vitesse (rampe en S,
double rampe d'accélération/décélération) Mesure de vitesse par dynamo tachy, codeur,
FEM Régulation de vitesse Traitement des références couple / courant Limitation de couple externe Régulation de courant Défluxage automatique Optimisation automatique des régulateurs de
courant d'induit, de courant d'excitation, devitesse, de FEM
Surveillance vitesse Logique de commande ON / OFF Commande en mode externe / local Arrêt d'urgence Détection automatique d'ordre des phases Détection surcharge moteur Fonction potentiomètre motorisé interne pour
référence vitesse Fonction jog (marche impulsionnelle) Macro-programmes
Fonctions de surveillance/protection
Auto-testsPile de défautsProtection du moteur: Absence retour vitesse Echauffement anormal (mesure par sonde
CTP) Surcharge (I² t) Survitesse Moteur bloqué Surintensité d'induit Ondulations d'induit Surtension d'induit Courant d'excitation mini Surintensité d'excitationProtection du variateur: Echauffement anormal Fonction chien de garde Pertes réseau
DCS 400 - le variateur c.c. compact

II K 2-1
2 Principaux constituants du DCS 400
Fig. 2/1: Principaux constituants du DCS 400
L1K1
Q1
0
T
T
6'&6&21
42
F1
230.
..500
V
µPM
'&6
115.
..230
V A
C11
5 / 2
30 V
AC
82
1
RS232)LOWHU&(0
5pVHDXGH
WHUUDLQYHUV$3,
/pJ
HQGH
$OLPHQWDWLRQ
&RPPDQGH
WK\ULVWRUV
3&
ORJLFLHORX
$3, (
OHFWURQLTXHGHFRPPDQGH
0LFUR
FRQVROH
([FLWDWLRQ
(QWUpHV6RUWLHV
,QWHUIDFHV
VpULH
InterfaceDDCS
(fibre optique)
&RXSOHXU
UpVHDX
(QWVRUWORJLTXHV9SDVGLVRODWLRQJDOYDQLTXH
6RUWLHDQDORJLTXHSRXUYDOHXUVGHPHVXUH
(QWUpHDQDORJLTXHELWVQRQFRPSOpPHQWpH
6RUWLHUHOHLV9FD$
115.
..230
V c
.a.
115
/ 230
V c
.a.

en préparation
Planifié en 1999
II K 2-2
2.1 Caractéristiques et contraintes d'environnement
Alimentation réseau - pont de puissanceTension triphasée: 230 à 500 V selon CEI 38Fluctuation de tension: ±10% en permanence ; ±15%
transitoire *Fréquence nominale: 50 Hz ou 60 HzFluctuation fréquence statique: 50 Hz ±2 %; 60 Hz ±2 %Dynamique: plage de fréquence: 50 Hz: ±5 Hz; 60 Hz: ± 5 Hz
df/dt: 17 % / s* = 0,5 à 30 périodes
Alimentation réseau - électronique de commandeTension monophasée: 115 à 230 V selon CEI 38Fluctuation de tension: -15% / +10%Plage de fréquence: 45 Hz à 65 Hz
Degré de protectionModule convertisseur: IP 00
Traitement de surfaceModule convertisseur, couvercle: RAL 9002 gris clair
boîtier: RAL 7012 gris foncé
Fig. 2.1/1: Courbe de déclassement altitude/capacité de charge
Capacité de charge (%)
Fig. 2.1/2: Courbe de déclassement température/capacité decharge
Capacité de charge (%)
Contraintes d'environnementTempérature amb. admissible à I CC: +5 à +40°CTempérature amb., module convert.:+40°C à 55°C; cf. Fig. 2.1/2Gradient de température: < 0,5°C / minuteTempérature de stockage: -40 à +55°CTempérature pendant le transport: -40 à +70°CHumidité relative: 5 à 95%, sans condensationDegré de pollution: Classe 2
Altitude:<1000 m: 100%, sans réduction de courant>1000 m: avec réduction de courant, cf. Fig. 2.1/1
Vibration module convertisseur: 0,5 g; 5 Hz à 55 Hz
Niv. sonores: Taille en module(1 m distance)
A1 55 dBAA2 55 dBAA3 60 dBAA4 68 dBA
Conformité normativeLes modules convertisseurs et les enveloppes sont destinés à des environnementsindustriels . Au sein de l'EU, les constituants satisfont les exigences des directiveseuropéennes du tableau suivant.
Normalisation nord-américaineEn Amérique du nord, les constituants dusystème satisfont aux exigences du ta-bleau suivant.
70
80
90
100
110
30 35 40 45 50 55°C
Nota:s'applique uniquement aux convertisseursen module.
50
60
70
80
90
100
1000 2000 3000 4000 5000 m
Principaux constituants du DCS 400
Directives européennes Document du fabricantNormes harmonisées
Module convertisseur
Directive Machines89/392/CEE93/68/CEE
Certificat d'incorporationEN 60204-1[CEI 204-1]
Directive Basse Tension73/23/CEE93/68/CEE
Déclaration CE deconformité
EN 60146-1-1[CEI 146-1-1]EN 50178 [CEI --]voir égalementCEI 664
Directive CEM89/336/CEE93/68/CEE
Déclaration CE deconformité. Pour autantqu'il y a respect de toutesles consignes d'installationconcernant le choix descâbles, le câblage et lesfiltres CEM ou letransformateur utilisé.
EN 61800-3 ➀[CEI 1800-3]
Pour les limites d'émission et d'immunité,conformité EN 50081-2 / EN 50082-2
➀ respect des "Règles de CEM" (document3 ADW 000 032)
Le Dossier technique de construction auquelcette Déclaration fait référence contient lerapport et le certificat d'ABB EMCCertification AB, en tant qu'organismecompétent au titre de la Directive CEM.
Sécurité pouréquipement deconversion depuissance ≤ 600 V
Norme pour moduleUL 508 C
Equipement decontrôle-commandeindustriel: produitsindustriels ≤ 600 V
CSA C 22.2. N°.1495
II K 2-3
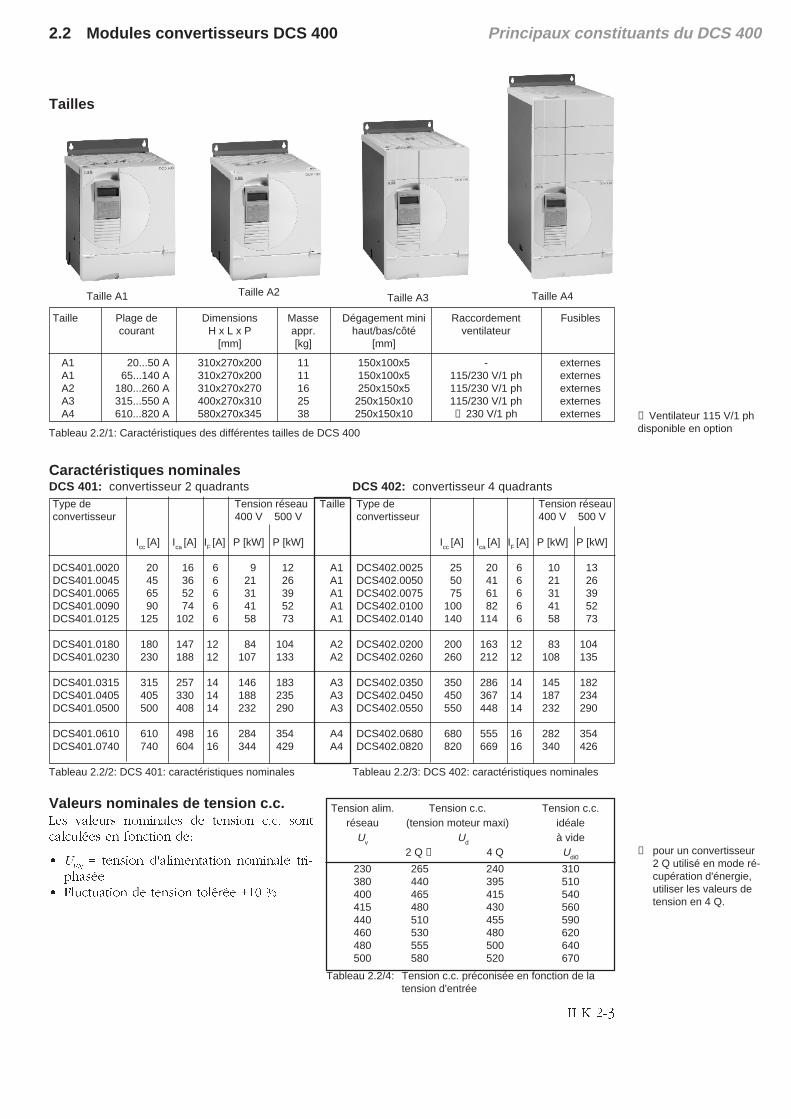
Type de Tension réseauconvertisseur 400 V 500 V
Icc [A] Ica [A] IF [A] P [kW] P [kW]
DCS402.0025 25 20 6 10 13DCS402.0050 50 41 6 21 26DCS402.0075 75 61 6 31 39DCS402.0100 100 82 6 41 52DCS402.0140 140 114 6 58 73
DCS402.0200 200 163 12 83 104DCS402.0260 260 212 12 108 135
DCS402.0350 350 286 14 145 182DCS402.0450 450 367 14 187 234DCS402.0550 550 448 14 232 290
DCS402.0680 680 555 16 282 354DCS402.0820 820 669 16 340 426
Tableau 2.2/3: DCS 402: caractéristiques nominales
Type de Tension réseauconvertisseur 400 V 500 V
Icc [A] Ica [A] IF [A] P [kW] P [kW]
DCS401.0020 20 16 6 9 12DCS401.0045 45 36 6 21 26DCS401.0065 65 52 6 31 39DCS401.0090 90 74 6 41 52DCS401.0125 125 102 6 58 73
DCS401.0180 180 147 12 84 104DCS401.0230 230 188 12 107 133
DCS401.0315 315 257 14 146 183DCS401.0405 405 330 14 188 235DCS401.0500 500 408 14 232 290
DCS401.0610 610 498 16 284 354DCS401.0740 740 604 16 344 429
Tableau 2.2/2: DCS 401: caractéristiques nominales
Taille
A1A1A1A1A1
A2A2
A3A3A3
A4A4
2.2 Modules convertisseurs DCS 400
Caractéristiques nominalesDCS 401: convertisseur 2 quadrants DCS 402: convertisseur 4 quadrants
Valeurs nominales de tension c.c.Les valeurs nominales de tension c.c. sontcalculées en fonction de:
UVN
= tension d'alimentation nominale tri-phasée
Fluctuation de tension tolérée ±10 %
Tableau 2.2/4: Tension c.c. préconisée en fonction de latension d'entrée
Taille Plage de Dimensions Masse Dégagement mini Raccordement Fusiblescourant H x L x P appr. haut/bas/côté ventilateur
[mm] [kg] [mm]
A1 20...50 A 310x270x200 11 150x100x5 - externes A1 65...140 A 310x270x200 11 150x100x5 115/230 V/1 ph externes A2 180...260 A 310x270x270 16 250x150x5 115/230 V/1 ph externes A3 315...550 A 400x270x310 25 250x150x10 115/230 V/1 ph externes A4 610...820 A 580x270x345 38 250x150x10 ➀ 230 V/1 ph externes
Tableau 2.2/1: Caractéristiques des différentes tailles de DCS 400
Taille A2Taille A1 Taille A3 Taille A4
Tailles
➀ pour un convertisseur2 Q utilisé en mode ré-cupération d'énergie,utiliser les valeurs detension en 4 Q.
➀ Ventilateur 115 V/1 phdisponible en option
Tension alim. Tension c.c. Tension c.c.réseau (tension moteur maxi) idéale
Uv Ud à vide2 Q ➀ 4 Q Udi0
230 265 240 310380 440 395 510400 465 415 540415 480 430 560440 510 455 590460 530 480 620480 555 500 640500 580 520 670
Principaux constituants du DCS 400
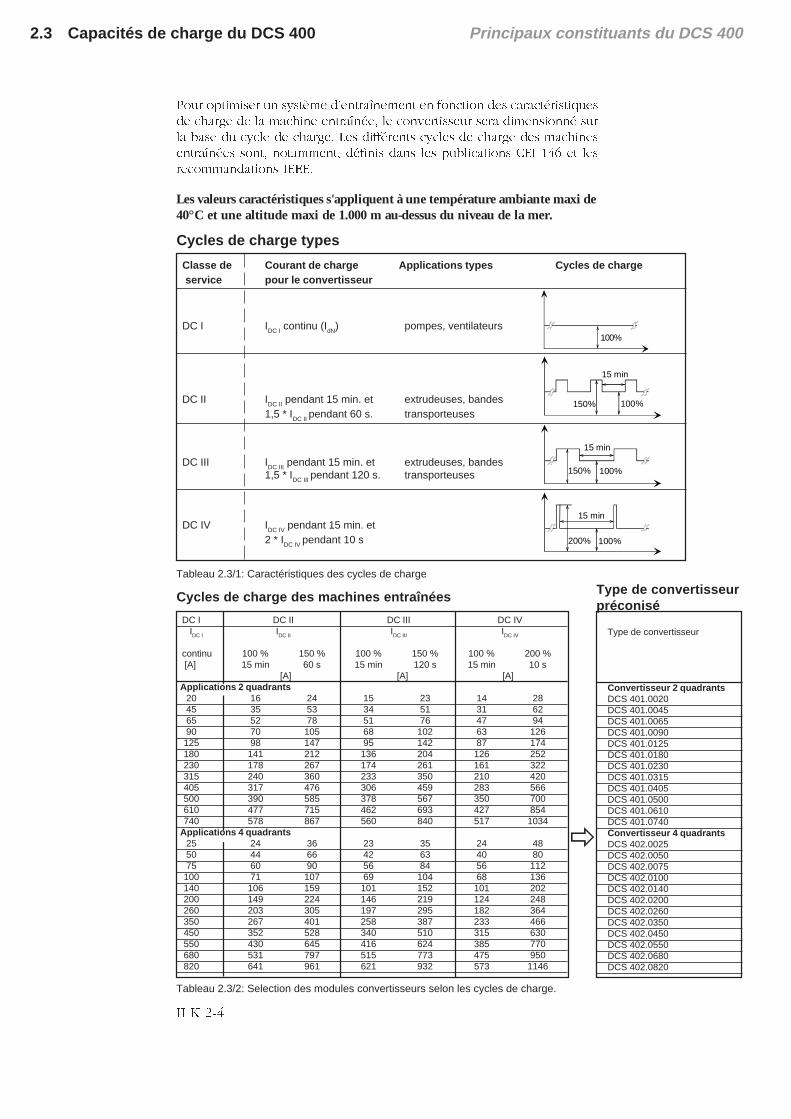
2.3 Capacités de charge du DCS 400
Pour optimiser un système d'entraînement en fonction des caractéristiquesde charge de la machine entraînée, le convertisseur sera dimensionné surla base du cycle de charge. Les différents cycles de charge des machinesentraînées sont, notamment, définis dans les publications CEI 146 et lesrecommandations IEEE.
Les valeurs caractéristiques s'appliquent à une température ambiante maxi de40°C et une altitude maxi de 1.000 m au-dessus du niveau de la mer.
II K 2-4
Tableau 2.3/2: Selection des modules convertisseurs selon les cycles de charge.
Classe de Courant de charge Applications types Cycles de charge service pour le convertisseur
DC I IDC I continu (IdN) pompes, ventilateurs
DC II IDC II pendant 15 min. et extrudeuses, bandes1,5 * IDC II pendant 60 s. transporteuses
DC III IDC III pendant 15 min. et extrudeuses, bandes1,5 * IDC III pendant 120 s. transporteuses
DC IV IDC IV pendant 15 min. et2 * IDC IV pendant 10 s
Cycles de charge types
Tableau 2.3/1: Caractéristiques des cycles de charge
Type de convertisseur
Convertisseur 2 quadrantsDCS 401.0020DCS 401.0045DCS 401.0065DCS 401.0090DCS 401.0125DCS 401.0180DCS 401.0230DCS 401.0315DCS 401.0405DCS 401.0500DCS 401.0610DCS 401.0740Convertisseur 4 quadrantsDCS 402.0025DCS 402.0050DCS 402.0075DCS 402.0100DCS 402.0140DCS 402.0200DCS 402.0260DCS 402.0350DCS 402.0450DCS 402.0550DCS 402.0680DCS 402.0820
Cycles de charge des machines entraînées Type de convertisseurpréconisé
ð
100%
150% 100%
15 min
150% 100%
15 min
200% 100%
15 min
DC I DC II DC III DC IV IDC I IDC II IDC III IDC IV
continu 100 % 150 % 100 % 150 % 100 % 200 % [A] 15 min 60 s 15 min 120 s 15 min 10 s
[A] [A] [A]Applications 2 quadrants
20 16 24 15 23 14 2845 35 53 34 51 31 6265 52 78 51 76 47 9490 70 105 68 102 63 126125 98 147 95 142 87 174180 141 212 136 204 126 252230 178 267 174 261 161 322315 240 360 233 350 210 420405 317 476 306 459 283 566500 390 585 378 567 350 700610 477 715 462 693 427 854740 578 867 560 840 517 1034
Applications 4 quadrants25 24 36 23 35 24 4850 44 66 42 63 40 8075 60 90 56 84 56 112100 71 107 69 104 68 136140 106 159 101 152 101 202200 149 224 146 219 124 248260 203 305 197 295 182 364350 267 401 258 387 233 466450 352 528 340 510 315 630550 430 645 416 624 385 770680 531 797 515 773 475 950820 641 961 621 932 573 1146
Principaux constituants du DCS 400
II K 2-5
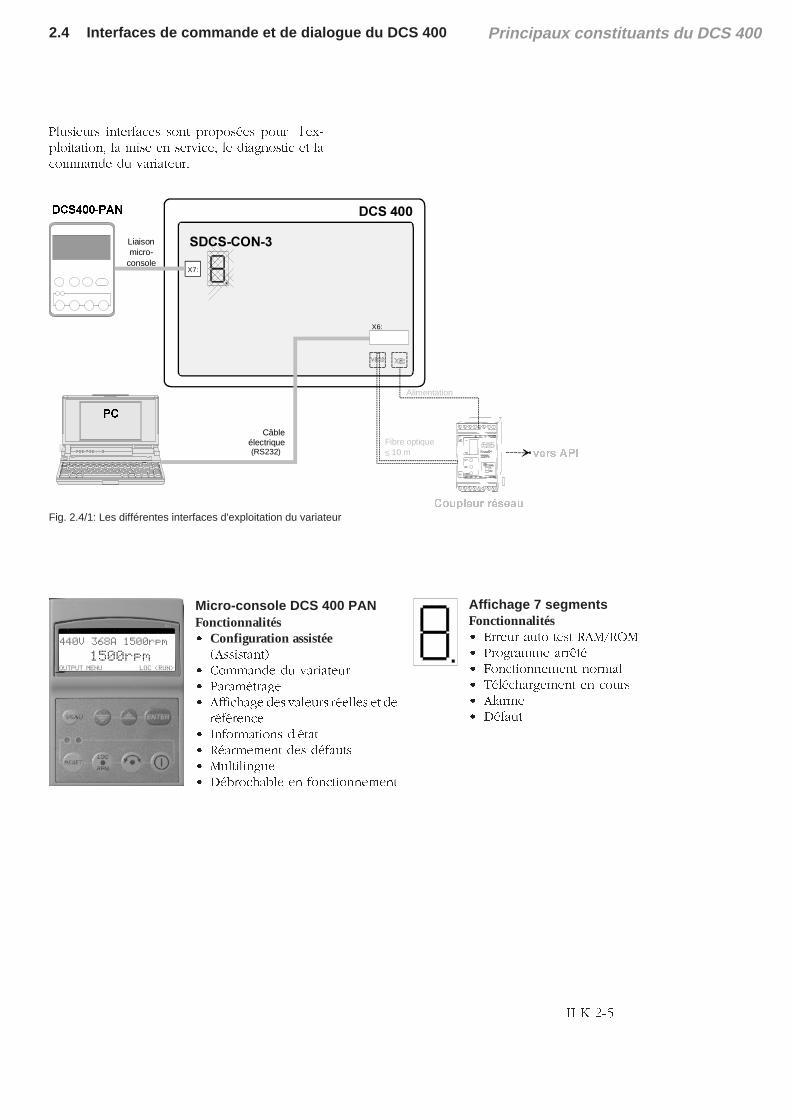
Principaux constituants du DCS 4002.4 Interfaces de commande et de dialogue du DCS 400
Fig. 2.4/1: Les différentes interfaces d'exploitation du variateur
Plusieurs interfaces sont proposées pour l'ex-ploitation, la mise en service, le diagnostic et lacommande du variateur.
Micro-console DCS 400 PANFonctionnalités Configuration assistée
(Assistant) Commande du variateur Paramétrage Affichage des valeurs réelles et de
référence Informations d'état Réarmement des défauts Multilingue Débrochable en fonctionnement
Affichage 7 segmentsFonctionnalités Erreur auto-test RAM/ROM Programme arrêté Fonctionnement normal Téléchargement en cours Alarme Défaut
440V 368A 1500rpm
1500rpmOUTPUT MENU AUTO OFF LOC <RUN>
3&
X7:
'&6
6'&6&21
(RS232)
X6:
&RXSOHXUUpVHDX
Liaisonmicro-
console
Câble électrique Fibre optique
≤ 10 m
Alimentation
'&63$1
YHUV$3,

II K 2-6
Exploitation à partir d'un PCAccessoires: Câble au standard RS232, connecteur mâle-
femelle sub-D 9 pointsOutil logiciel: Programme "Drive Window Light"Configuration requise / préconisée: PC avec processeur 386 ou plus Disque dur avec 1Mo disponible Ecran VGA Windows 3.1, 3.11, 95, NT ➀ Lecteur de disquettes 3 1/2"➀ en préparation
Assistant de configurationL'assistant de configuration simplifie le paramé-trage et l'optimisation du variateur. Il guidel'utilisateur pas à pas pour la procédure de miseen route.
Outil logiciel "Drive Window Light"Drive Window Light est un programme PC d'aideà la mise en route, au diagnostic, à la maintenan-ce et à la localisation des défauts.
Ecran de configuration du système
Vue d'ensemble du système.
Commande variateur
Commande du variateur sélectionné.
Paramétrage
Traitement des signaux et paramétrage du varia-teur sélectionné.
Tendance
Suivi de tendance des valeurs de mesure du varia-teur sélectionné.
Pile de défauts
Consultation et suppression du contenu de la pilede défauts.
Fig. 2.4/2: Exemple d'écran de l'Assistant de configuration
Principaux constituants du DCS 400

Le dialogue avec un système de commande se faitsur une liaison série optique via un coupleurréseau.
II K 2-7
2.5 Mise en réseau du variateur
Coupleur réseauEléments requis: Câble à fibre optique plastique Coupleur réseauCoupleurs proposés pour les réseaux de terrainsuivants: PROFIBUS AC 31 MODBUSUne documentation détaillée sur les différentscoupleurs réseau est à votre disposition.
Fig. 2.5/1: Mise en réseau de terrain du DCS 400
Principaux constituants du DCS 400
'&6
6'&6&21
Nxxx-01xxxxxxxxADAPTER
BUSTERM INAT ION
ON
OFF
RXD
TXD
PE SHF DG D(N) D(P)
X1
X2
PE SHF DG D(N) D(P)SH
XM IT
REC
ERRO R
+24V 0V SH
(RS232)
X8:V800
&RXSOHXUUpVHDX
Liaisonmicro-
console
Câble électrique Fibre optique
≤ 10 m
Alimentation
'&63$1
YHUV$3,

II K 2-8
Principaux constituants du DCS 400
Dég
agem
ent m
ini h
aut
T1
= 1
50 m
m p
our
taill
e A
1T
1 =
250
mm
pou
r ta
illes
A2-
A3
Pos
ition
de
mon
tage
Bornier raccord. puissance
Bornier raccord. excitationet alimentation auxiliaire
Bornier signaux
310
pour
taill
es A
1/A
2
400
pour
taill
e A
3
Dég
agem
ent m
ini b
asT
2 =
150
mm
pou
r ta
ille
A1
T2
= 2
50 m
m p
our
taill
es A
2-A
3
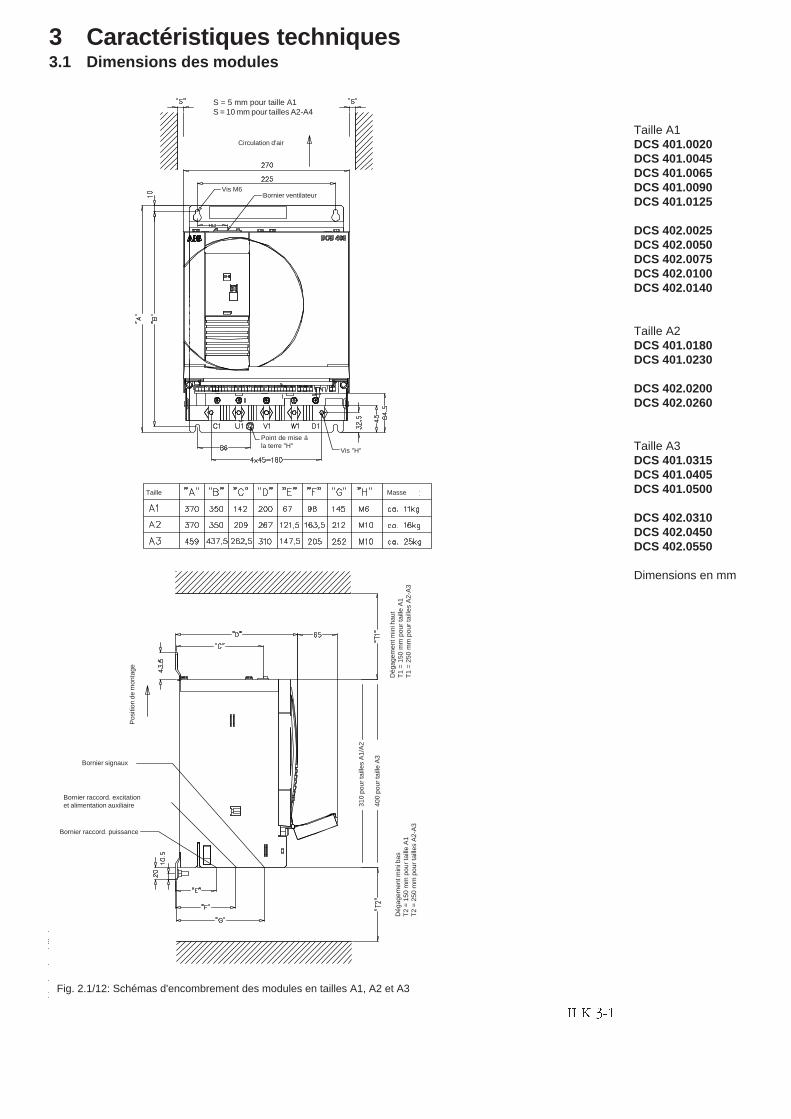
3 Caractéristiques techniques3.1 Dimensions des modules
II K 3-1
Taille A1DCS 401.0020DCS 401.0045DCS 401.0065DCS 401.0090DCS 401.0125
DCS 402.0025DCS 402.0050DCS 402.0075DCS 402.0100DCS 402.0140
Taille A2DCS 401.0180DCS 401.0230
DCS 402.0200DCS 402.0260
Taille A3DCS 401.0315DCS 401.0405DCS 401.0500
DCS 402.0310DCS 402.0450DCS 402.0550
Dimensions en mm
Fig. 2.1/12: Schémas d'encombrement des modules en tailles A1, A2 et A3
S = 5 mm pour taille A1S = 10 mm pour tailles A2-A4
Circulation d'air
Vis M6Bornier ventilateur
Vis "H"
Point de mise ála terre "H"
Taille Masse

II K 3-2
Taille A4DCS 401.0610DCS 401.0740
DCS 402.0680DCS 402.0820
Dimensions en mm
Fig. 2.1/13: Schémas d'encombrement du module en taille A4
Caractéristiques techniques
Bornier ventilateur pour vis M12
Bornier puissance: barre collectrice 40 x 5 mmMasse ±38 kg
pour vis M12
Dég
agem
ent m
ini h
aut
Bornier ventilateur
Circulation d'air
Mise á la terreM12
Deg
agem
ent m
ini b
as

type convertisseur C1, D1 (AM1, KM1) U1, V1, W1 (AK1, AK3, AK5) PE
[Nm]IDC[A-]
1.
[mm²]
(2.)
[mm²]Iv
[A~]
1.
[mm²]
(2.)
[mm²] [mm²]
DCS 401.0020DCS 402.0025
2025
1 x 4 -1620
1 x 4 - 1x 2.5 1 x M6 6
DCS 401.0045DCS 402.0050
4550
1 x 10 -3641
1 x 6 - 1x 6 1 x M6 6
DCS 401.0065DCS 402.0075
6575
1 x 25 -5261
1 x 25 - 1x 6 1 x M6 6
DCS 401.0090DCS 402.0100
90100
1 x 25 -7482
1 x 25 - 1x 10 1 x M6 6
DCS 401.0125 125 1 x 25 - 102 1 x 25 - 1x 10 1 x M6 6
DCS 402.0140 140 1 x 35 - 114 1 x 35 - 1x 16 1 x M6 6
DCS 401.0180DCS 402.0200
180200
2 x 35 1 x 95147163
2 x 25 1 x 95 1x 16 1 x M8 13
DCS 401.0230DCS 402.0260
230260
2 x 35 1 x 95188212
2 x 25 1 x 95 1x 25 1 x M8 13
DCS 401.0315DCS 402.0350
315350
2 x 70 -257286
2 x 50 1x 35 1 x M8 13
DCS 401.0405DCS 402.0450
405450
2 x 95 -
330367
2 x 95 - 1x 50 1 x M10 25DCS 401.0500DCS 402.0550
500550
408465
DCS 401.0610DCS 402.0680
610680
2 x 150 4 x 50498555
2 x 120 3 x 70 1x 50 2 x M10 25
DCS 401.0740DCS 402.0820
740820
4 x 95 3 x 150604669
4 x 70 3 x 95 1x 70 2 x M12 50
II K 3-3
3.2 Section des câbles et couples de serrage
Pour le calcul de la section du conducteur PE, sereporter à la norme VDE 0100 ou la norme nationalecorrespondante. Nous vous rappelons que les con-vertisseurs de puissance peuvent avoir un effet limi-teur de courant.
Tableau 2.3/2: Section et couples de serrage des câblesdes DCS 400
Sections préconisées des câbles XLPE (disposés en trèfle) selon VDE 0298, Partie 2 , pour une température ambiante maxi de50°C.
Caractéristiques techniques

II K 3-4
3.3 Pertes de puissance Caractéristiques techniques
DCS 400
Type de Pertes de puissance PL [W]convertisseur Charge
Ic.c. [A] 25% 50% 75% 100%
DCS401.0020 20DCS401.0045 45DCS401.0065 65DCS401.0090 90DCS401.0125 125
DCS401.0180 180DCS401.0230 230
DCS401.0315 315DCS401.0405 405DCS401.0500 500
DCS401.0610 610DCS401.0740 740
DCS402.0025 25DCS402.0050 50DCS402.0075 75DCS402.0100 100DCS402.0140 140
DCS402.0200 200DCS402.0260 260
DCS402.0350 350DCS402.0450 450DCS402.0550 550
DCS402.0680 680DCS402.0820 820
Tableau 2.4/3: Pertes de puissance du DCS 400
Remarque sur le tableau• Les valeurs sont des valeurs maximales établies
pour les cas les plus défavorables.
2 qu
adra
nts
4 qu
adra
nts
en p
repa
ratio
n

II K 3-5
3.4 Refroidissement du pont de puissance
Différents types de ventilateur pour le DCS 400
Caractéristiques des ventilateurs des DCS 400
Raccordement du ventilateur duDCS 400
Configuration 3
Configuration 2
Configuration 1
Tableau 2.5/6: Caractéristiques des ventilateurs des DCS 400
Tableau 2.5/5: Différents types de ventilateur pour le DCS 400
Surveillance du pont de puissance du DCS 400
Le pont de puissance est surveillé par une sonde àthermistance CTP isolée électriquement. En casd'échauffement, une alarme est d'abord signalée etsi la température continue de monter, un défaut estsignalé. Dans ce cas, le variateur est mis horstension de manière contrôlée.
1 2 3X99: 4 5
L N9DF
1 2 3X99: 4 5
L N9DF
M~
1 2 3X99:
M~
4 5
M55 M56
M~
1 2 3X99:
M~
4 5
M55 M56
M~
M~
M57 M58
1 2 3X99: 4 5
L N9DF
1 2 3X99: 4 5
L N9DF
M55
M~
1 2 3 4 5X99:
L N
L N
HLWKHU9DFRU9DF
Caractéristiques techniques
Type convertisseur Taille Type ventilateur Configuration
DCS 40x.0020...DCS 40x.0050 A1 no Fan -
DCS 40x.0065...DCS 40x.0140 A1 2x CN2B2 1
DCS 40x.0180...DCS 40x.0260 A2 2x CN2B2 1
DCS 40x.0315...DCS 40x.0350 A3 2x CN2B2 1
DCS 40x.0405...DCS 40x.0570 A3 4x CN2B2 2
DCS 40x.0610...DCS 40x.0820 A4 1x W2E200 (230 V) 3
DCS 40x.0610.52...DCS 40x.082.52 A4 1x W2E200 (115 V) 3
Type ventilateur CN2B2 W2E200 W2E200
Tension nominale [V] 115; 1~ 230; 1~ 115; 1~
Fluctuation tolérée [%] ±10 +6/-10 +6/-10
Fréquence [Hz] 50 60 50 60 50 60
Consommation [W] 16 13 64 80 64 80
Courant absorbé [A] 0.2 0.17 0.29 0.35 0.6 0.7
Courant de blocage [A] < 0.3 < 0.26 < 0.7 < 0.8 <1.5 <1.8
Débit d'air en soufflage libre [m3/h] 156 180 925 1030 925 1030
Point de fonctionnement[m3/h] sous A
- - -
Température ambiante maxi [° C] < 60 < 75 < 75
Durée de vie de la graisse ± 40000 h/60° ± 45000 h/60° ± 45000 h/60°
Protection Blocage Echauffement anormal

II K 3-6
3.5 Carte de commande SDCS-CON-3
Fonctions de contrôle (chien de garde)La carte de commande intègre un chien de gardedont le déclenchement a les conséquences suivan-tes :
- la commande d'allumage des thyristors est réinitialisée et bloquée.- Les sorties logiques sont forcées à '0 V'.
Fig. 3.3/1 Agencement de la carte de commande SDCS-CON-3
Fig. 3.3/2 Affichage 7 segments de lacarte SDCS-CON-3
Affichage sept segmentsLa carte de commande inclut un affichage 7 seg-ments présentant des informations d'état sur le va-riateur.
Si le +5 V franchit le seuil de déclenchement, il y aréinitialisation (reset) générale. Tous les registresd'E/S sont forcés à 0 et les impulsions d'allumage sontinterrompues.Si la fonction de surveillance de la tension réseaudéclenche, les impulsions d'allumage sont forcées àla limite de stabilité de l'onduleur.
Surveillance de la tension d'alimentation
Tension d'alimentation +5 V Réseau
Seuil de déclenchementen sous-tension +4,50 V ≤97 VAC
Interfaces sérieLa carte de commande SDCS-CON-3 comporte troisvoies de liaison série :• X7: voie de liaison série réservée à :
- la micro-console DCS 400 PAN- l'adaptateur (3AFE 10035368)
• X6: voie de liaison série RS232. Connecteurfemelle D-Sub 9 points
• V800 voie intégrée pouvant être utilisée pour uncoupleur réseau avec câble à fibres optiques
Caractéristiques techniques
0,7s 0,7s 0,7s
Erreur détectée lors de l'auto-test mémoire RAM/ROM
Séquence de télécharge-ment en cours (écriture)
Fonctionnement normal
Le programme n'est pas en cours d'exécution
Alarme
Défaut
12
123
101112
1 342
X1 X2 X3 X4 X5 X8
S4 S2 S1
56
R115X6
S5
12
78
X7
X12
X13
1 4 1 9 1 8 1 10 1 5 1 2
233.5
190
Ch
AI2 X2:3
3-4
n. c. to +10V 22 kΩ ->+10V
5-6
6
6
6
1 562
1 562
123
1112
10 123
1112
10
123
1112
10 123
1112
10
5 V 24 V
5 V 24 V
1 342
1 342
6
RS232
DDCS
V80012
78
3RVLWLRQGHVFDYDOLHUV
Tous les supports sont conducteurs, reliés á GND (terre)
Bleu
Gris
Préréglage usine
Borne
Entrèe AI2 utilisée pour la mesure de température avec sonde CTP
Non complémenté.:
Differéntiel
Voie
n.f. á +10V
* Tachy (+ et -) reliée sur AITAC;X3:4 reliée sur GND
Tachy (+ et -) reliée sur AITAC
Tachy et sonde CPT
Codeur incrémental
Téléchargement logicielTéléchargem. logiciel sur PROM Flash interne autorisé Nota: position de cavaliers lue uniquement á la mise sous tension
Démarrage normal; téléchargement logiciel interdit
Ne pas modifier
Point de Mes.IA réel

II K 3-7
Fig. 3.2/5 Raccordement aux bornes de la carte SDCS-CON-3
Raccordement des E/S logiques et analogiquesde la carte SDCS-CON-3
Reso- Valeur des Mise à Charge Plage de Remarqueslution entrées / l'échelle mode[bit] sorties par commun
±90...270 V9 + sign ±30...90 V R 115/ ±20 V ➀ ➁
±8...30 V logiciel
9 + sign -10...0...+10 V Logiciel ±20 V ➀ ➁
9 + sign -10...0...+10 V Logiciel ±40 V ➀ ➁
≤10* mA pour utilisation externe≤10* mA ex. potent. de référence
7 + sign -10...0...+10 V Logiciel ≤5 * mA7 + sign -10...0...+10 V Logiciel ≤5 * mA
Alimentation codeur Remarques
Entrées non isoléesfréquence maxi ≤300 kHz
5V/ 24V ≤ 200 mA* Sélection par cavalier S2: 10-12
Valeur Signal défini Remarquesd'entrée par
0...+5 V Logiciel = état "0"+15...+30 V = état "1"
Valeur de Signal défini Remarquessortie par
50 * mA Logiciel Limitation de courant pour les4 sorties= 160 mA
➀ temps total de lissage ≤2 ms➁ -20...0...+20 mA par résistance externe 500 Ω
* protégée des courts-circuits
Connecteurs des bornes X1: à X5: amovibles,mais non interchangeables.
NotaSauf spécifications contraires, tous les si-gnaux sont référencés au 0 V. Sur toutesles cartes, ce potentiel est directementraccordé au châssis du module par élec-trodéposition aux points de fixation.
Caractéristiques techniques
90-270 V
30-90 V
8-30 V
ChA +
ChA -
ChB +
ChB -
ChZ +
ChZ -
GND
0 V
R115
+10V
S1:
100µ
+24 V/ ≤50 mA
100k1n1n
47n
100k
100k 100k
Power-Source
-
+
-
+
-
-
-
+
47.5100µ
100n
+10V
0V
-10V
470k
22n10k
4.75k
22 K
5
6
7
4
3
8
9
X4:1
2
3
4 5
6
7 8
10
4
5
1
2
3
4
2
3
2
X2:1
9
4
5
7
2
3
6
8
X1:1
X3:1
X5:
6'&6&21 Software
GND34
21
S1
+5/+24V1 2 3120 Ω
+5/+24V4 5 6120 Ω
+5/+24V7 8 9120 Ω
S2
+5V +24V10 11 12
5 6
Source puissance
Logiciel
AITAC
+24V
EA1
SA1SA2
EL1
EL2
EL3
EL4EL5
EL6
EL7EL8
SL4
SL1
SL2
SL3
EA2
II K 3-8
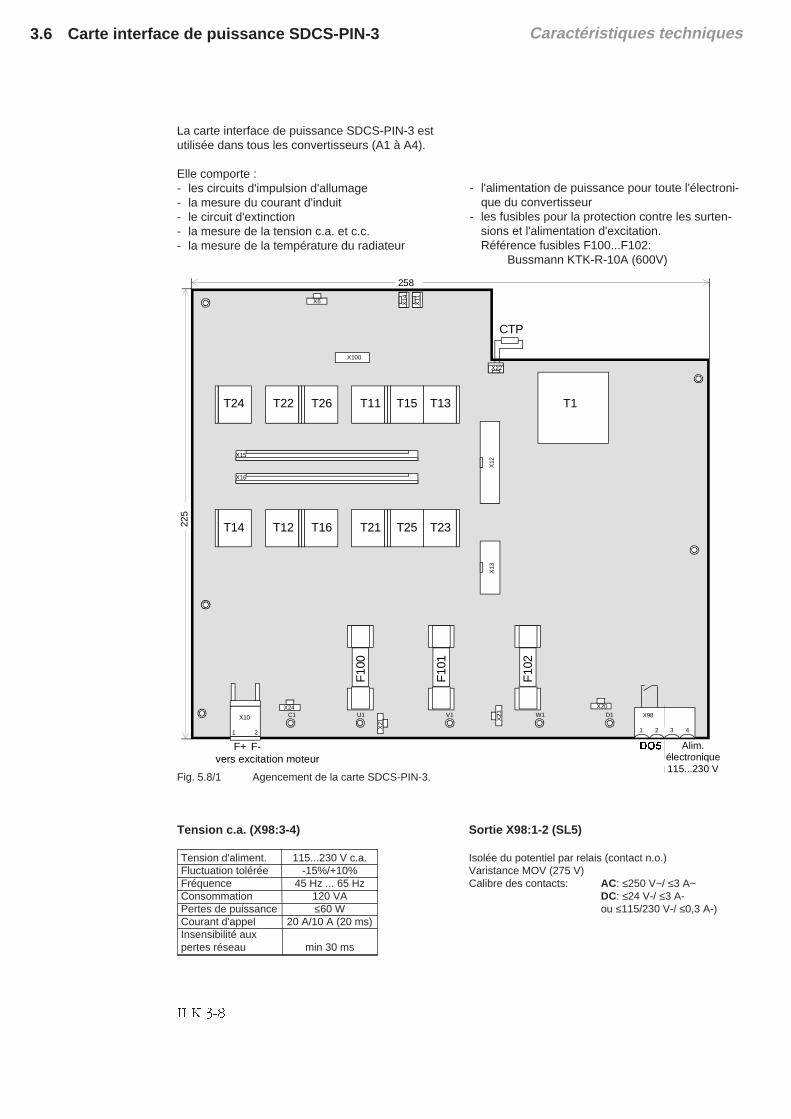
3.6 Carte interface de puissance SDCS-PIN-3
La carte interface de puissance SDCS-PIN-3 estutilisée dans tous les convertisseurs (A1 à A4).
Elle comporte :- les circuits d'impulsion d'allumage- la mesure du courant d'induit- le circuit d'extinction- la mesure de la tension c.a. et c.c.- la mesure de la température du radiateur
Fig. 5.8/1 Agencement de la carte SDCS-PIN-3.
- l'alimentation de puissance pour toute l'électroni-que du convertisseur
- les fusibles pour la protection contre les surten-sions et l'alimentation d'excitation.Référence fusibles F100...F102:
Bussmann KTK-R-10A (600V)
Sortie X98:1-2 (SL5)
Isolée du potentiel par relais (contact n.o.)Varistance MOV (275 V)Calibre des contacts: AC: ≤250 V~/ ≤3 A~
DC: ≤24 V-/ ≤3 A-ou ≤115/230 V-/ ≤0,3 A-)
Tension c.a. (X98:3-4)
Tension d'aliment. 115...230 V c.a.Fluctuation tolérée -15%/+10%Fréquence 45 Hz ... 65 HzConsommation 120 VAPertes de puissance ≤60 WCourant d'appel 20 A/10 A (20 ms)Insensibilité auxpertes réseau min 30 ms
Caractéristiques techniques
X6
T24 T22 T26 T11 T15 T13X
14
X11
X100
X15
X16
X22
T1
X12
X13
T14 T12 T16 T21 T25 T23
F10
0
F10
1
F10
2
X10
X24
X21
X23
X20
X98
1 2 3 4
PTC
1 2
C1 U1 V1 W1 D1
258
225
F+ '2F- Alim.électronique115...230 V
vers excitation moteur
CTP

II K 3-9
Le variateur DCS 400 intègre une carte d'excitation tri-phasée présentant les avantages suivants :
• tension d'excitation lissée- meilleure commutation du moteur- durée de vie des balais prolongée
• pertes thermiques moteur réduites• câblage simplifié
Fig. 8.5/1 Agencement de la carte d'excitation SDCS-FIS-3
X5
X3
X4
X6
X7
X2
X1
X14 T100
SDCS-FIS-3
135
45
3.7 Carte d'excitation SDCS-FIS-3
8.5.1 Caractéristiques électriques de la carte SDCS-FIS-3Tension d'entrée c.a.: 230 V...500 V ±10%; triphaséeTension de sortie c.c.: 50...350 V paramétrableCourant d'entrée c.a.: ≤ courant de sortieTension d'isolement c.a.: 600 VFréquence : idem que module convertisseur DCSCourant de sortie c.c. : 0,1 A...6 A pour module convertisseur d'induit de 20 A à 140 A
0,3 A...12 A pour module convertisseur d'induit de 180 A à 260 A0,3 A...14 A pour module convertisseur d'induit de 315 A à 550 A0,3 A...16 A pour module convertisseur d'induit ≥ 610 A
Pertes puiss. sous IF nom. : ≤40 WBornes X10:1,2 sur SDCS-PIN-3Section 4 mm²
Fig. 8.5/2 Schéma de la carte d'excitation
Caractéristiques techniques
U1V1
W1
SDCS-CON-3 X1 X2 X7
X10:2 X10:1
SDCS-PIN-3 SDCS-FIS-3
X12: X12:26
1
26
1
FPWM
8IFM
9
8
9 GND
3 3
X14
:
X14
:
X11:2
3
X100:1-2 X6:1-3
X6X4X3
Convertisseur
Commandebas niveau
Sortie c.c.(pour excit. moteur)
16
0,1
1
10
100
0 50 100 150 200 250 300 350
IF
UF
[A]
[V]220
1.5
0.3
1412
II K 3-10
Caractéristiques techniques
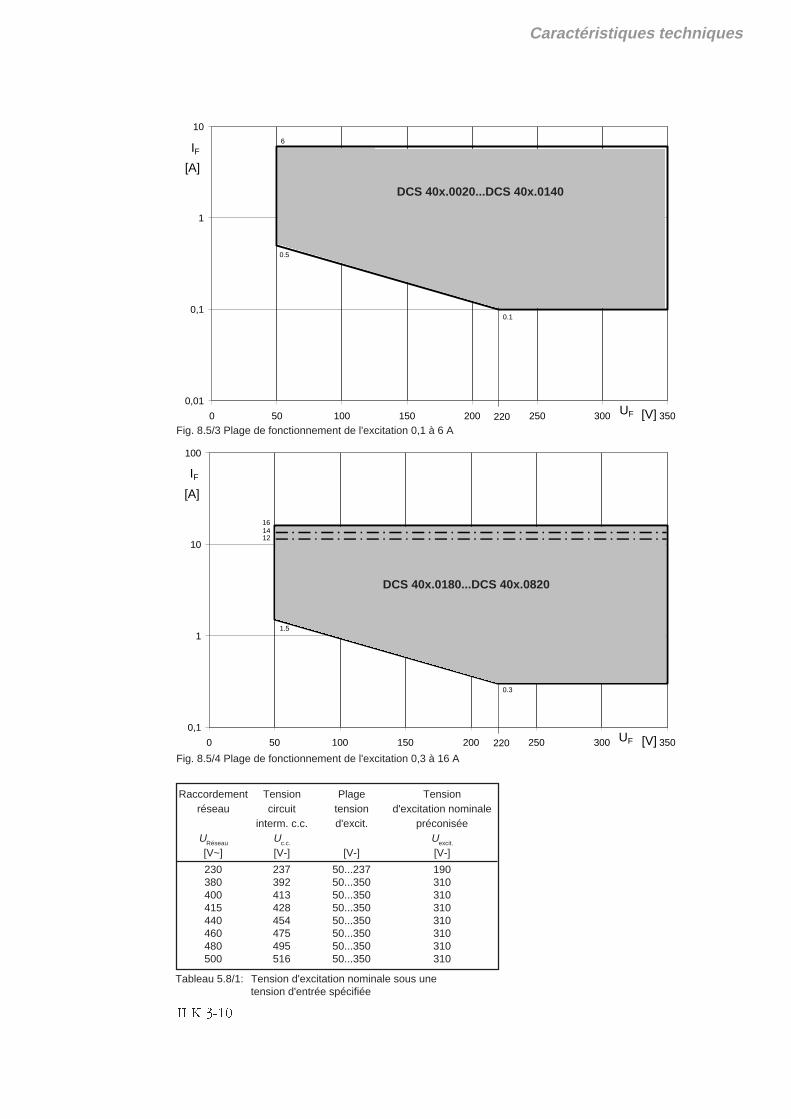
Fig. 8.5/3 Plage de fonctionnement de l'excitation 0,1 à 6 A
Fig. 8.5/4 Plage de fonctionnement de l'excitation 0,3 à 16 A
Tableau 5.8/1: Tension d'excitation nominale sous unetension d'entrée spécifiée
Raccordement Tension Plage Tensionréseau circuit tension d'excitation nominale
interm. c.c. d'excit. préconiséeURéseau Uc.c. Uexcit.
[V~] [V-] [V-] [V-]
230 237 50...237 190380 392 50...350 310400 413 50...350 310415 428 50...350 310440 454 50...350 310460 475 50...350 310480 495 50...350 310500 516 50...350 310
6
0,01
0,1
1
10
0 50 100 150 200 250 300 350
IF
UF
[A]
[V]220
0.5
0.1
DCS 40x.0180...DCS 40x.0820
DCS 40x.0020...DCS 40x.0140
II K 4-1
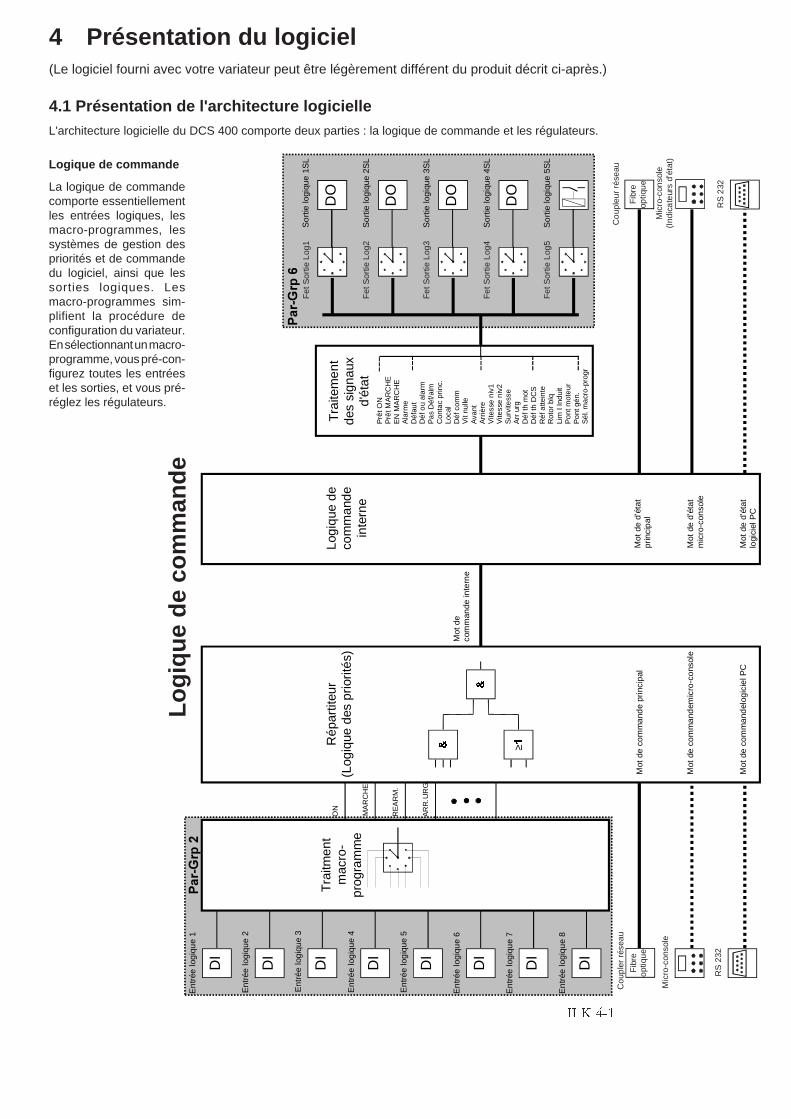
4 Présentation du logiciel(Le logiciel fourni avec votre variateur peut être légèrement différent du produit décrit ci-après.)
4.1 Présentation de l'architecture logicielleL'architecture logicielle du DCS 400 comporte deux parties : la logique de commande et les régulateurs.
Logique de commande
La logique de commandecomporte essentiellementles entrées logiques, lesmacro-programmes, lessystèmes de gestion despriorités et de commandedu logiciel, ainsi que lessorties logiques. Lesmacro-programmes sim-plifient la procédure deconfiguration du variateur.En sélectionnant un macro-programme, vous pré-con-figurez toutes les entréeset les sorties, et vous pré-réglez les régulateurs.
Logi
que
de c
omm
ande
RS
232
RS
232
DI
DI
DI
DI
DI
DI
DI
DI
≥
DO
DO
DO
DO
DO
3DU*
US
3DU*
US
Tra
itmen
tm
acro
-pr
ogra
mm
e
Rép
artit
eur
(Log
ique
des
prio
rités
)Lo
giqu
e de
com
man
dein
tern
e
Tra
item
ent
des
sign
aux
d'ét
at
Mic
ro-c
onso
le
Cou
ple
r ré
seau
Fib
reop
tique
Mic
ro-c
onso
le(I
ndic
ate
urs
d'ét
at)
Co
uple
ur r
ésea
u
Fib
reop
tique
En
trée
logi
que
1
Ent
rée
logi
que
2
Ent
rée
log
ique
3
Ent
rée
log
ique
4
Ent
rée
log
ique
5
En
trée
logi
que
6
En
trée
logi
que
7
En
trée
logi
que
8
Fet
Sor
tie L
og1
Fet
Sor
tie L
og2
So
rtie
logi
que
2SL
Fet
Sor
tie L
og3
So
rtie
logi
que
3SL
Fet
Sor
tie L
og4
So
rtie
logi
que
4SL
Fet
Sor
tie L
og5
So
rtie
logi
que
5SL
Mot
de
co
mm
ande
inte
rne
Mot
de
com
man
dem
icro
-con
sole
Mot
de
com
man
del
ogic
iel P
C
ON
MA
RC
HE
RE
AR
M.
AR
R.U
RG
.
Mot
de
d'ét
at
prin
cip
al
Mot
de
d'ét
at
mic
ro-c
onso
le
Mot
de
d'ét
at
logi
ciel
PC
Prê
t ON
Prê
t MA
RC
HE
EN
MA
RC
HE
Ala
rme
Déf
aut
Déf
ou
ala
rm
Pa
s D
éf/a
lmC
onta
c pr
inc.
Loca
lD
éf c
omm
Vit
nulle
Ava
ntA
rriè
reV
itess
e n
iv1
Vite
sse
niv
2S
urv
itess
eA
rr u
rgD
éf th
mot
Déf
th D
CS
Réf
atte
inte
Rot
or b
lqLi
m I
Ind
uit
Po
nt m
ote
urP
ont
gén
.S
él.
ma
cro-
prog
r
Mot
de
com
man
de
prin
cipa
l
So
rtie
logi
que
1SL
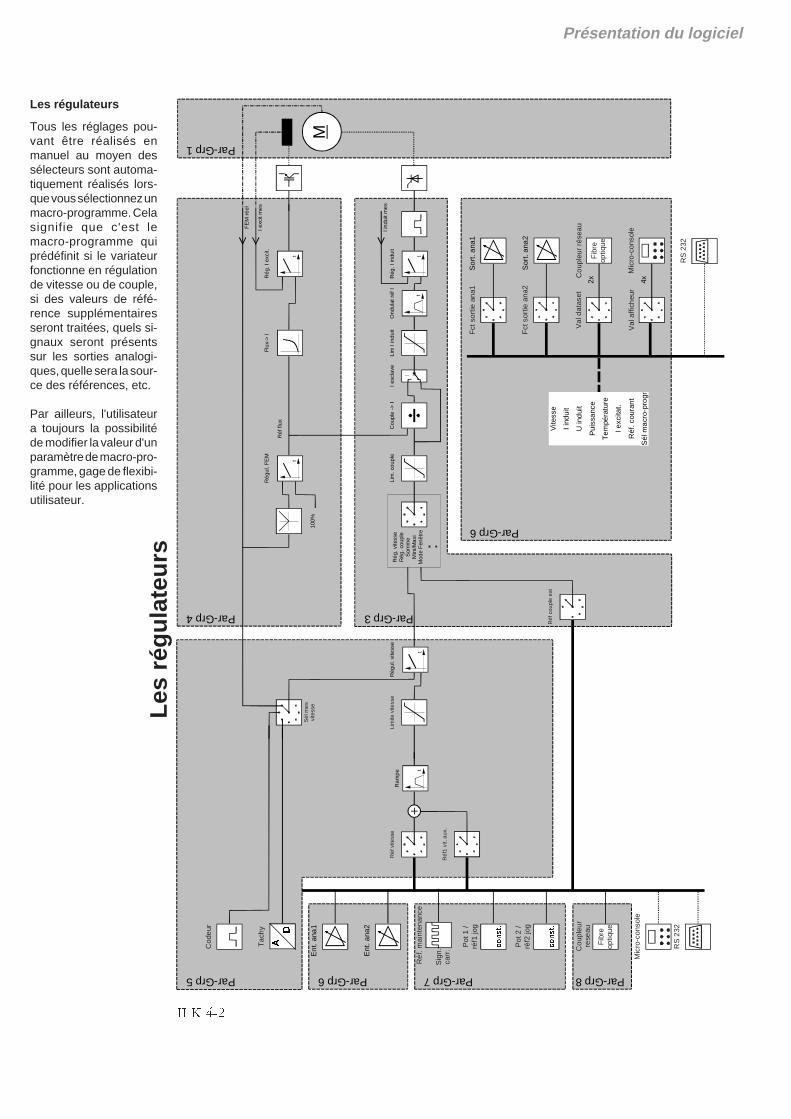
Les régulateurs
Tous les réglages pou-vant être réalisés enmanuel au moyen dessélecteurs sont automa-tiquement réalisés lors-que vous sélectionnez unmacro-programme. Celasignifie que c'est lemacro-programme quiprédéfinit si le variateurfonctionne en régulationde vitesse ou de couple,si des valeurs de réfé-rence supplémentairesseront traitées, quels si-gnaux seront présentssur les sorties analogi-ques, quelle sera la sour-ce des références, etc.
Par ailleurs, l'utilisateura toujours la possibilitéde modifier la valeur d'unparamètre de macro-pro-gramme, gage de flexibi-lité pour les applicationsutilisateur.
II K 4-2
Les
régu
late
urs
Présentation du logiciel
$
'
tt
tt
t
t
RS
232
RS
232
4x2x
M
Par-Grp 5 Par-Grp 6 Par-Grp 7 Par-Grp 8
Par-Grp 4 Par-Grp 3
Par-Grp 1
Par-Grp 6
Cod
eur
Ta
chy
FRQVW
Pot
1 /
réf1
jog
FRQVW
Pot
2 /
réf2
jog
Réf
cou
ple
ext
Ram
pe
Mic
ro-c
onso
le
Lim
ite v
itess
e
Sél
mes
vi
tess
e
Lim
. cou
ple
I ind
uit m
esI e
scla
veC
oupl
e ->
IO
ndul
at r
éf I
Lim
I in
duit
Réf
flux
Rég
ul. F
EM
100%
Flu
x->
IR
ég. I
exc
it.
Rég
. I in
duit
Rég
ul. v
itess
e
FE
M r
éel
I exc
it m
es
Ré
f. m
aint
enan
ce
Cou
ple
ur
rese
au
Réf
vite
sse
Réf
1 vi
t. au
x.
Fct
so
rtie
an
a1
Fct
sor
tie a
na2
Va
l dat
aset
Val
affi
cheu
r
En
t. an
a1
Ent
. ana
2
Mic
ro-c
onso
le
Co
uple
ur r
ésea
u
So
rt. a
na1
Sor
t. a
na2
Fib
reop
tique
Fib
reop
tique
Sig
n.
carr
.
Vite
sse
I ind
uit
U in
dui
t
Pu
issa
nce
Te
mpé
ratu
re
I exc
itat.
Réf
. cou
ran
t
Sé
l ma
cro-
pro
gr
Rég
. vite
sse
Rég
. cou
ple
Som
me
Min
i/Max
iM
ode
Fen
être

4.2 Les macro-programmes d'application
II K 4-3
Macro-programmes d'application du DCS 400Les macro-programmes sont des jeux de paramètrespréréglés qui simplifient beaucoup la configurationdu variateur lors de sa mise en service. L'utilisateurne doit ainsi procéder à aucun réglage paramètre parparamètre. Tous les signaux d'entrée et de sortiepour votre application sont préréglés dans le macro-programme que vous sélectionnez.
Le macro-programme d'application est sélectionnéau paramètre 2.01 SEL MACRO .
Même si vous sélectionnez un macro-programmespécifique, vous pouvez modifier le réglage de cer-tains paramètres selon vos besoins. Pour accéder àces paramètres, sélectionnez l'option MACRO-PRO-GR. Dès que l'option MACRO-PROGR est désélec-tionnée, la valeur de ce paramètre n'est plus affec-tée par un macro-programme .
Les macro-programmes d'application suivants sontdisponibles :
Macro 1: StandardMise sous/hors tension du variateur et ordrede marche via 2 entrées logiques.Référence de vitesse via l'entrée analog. 1.Limitation couple ext. via l'entrée analog. 2.Jog via 1 entrée logique .Vitesse mini peut être activée via 1 entréelog.2 entrées logiques pour événements externes(alarme/défaut).2 entrées logiques pour arrêt d'urgence etréarmement défaut.
En préparation
Macro 2: Vitesse man/ Vitesse constDémarrage et arrêt du variateur via 2 entréeslogiques.Référence vitesse via l'entrée analogique 1.Inversion sens de rotation via 1 entrée log.2 jeux de rampe sélectionnables via 1 entréelogique.Sélection de la référence vitesse ou de 2 vi-tesses fixes via 2 entrées logiques.2 entrées logiques pour arrêt d'urgence etréarmement défaut.
Macro 3: Manuel/AutoPermutation entre mode manuel et automati-que commandée par 1 entrée log.Mode manuel :
Démarrage et arrêt du variateur via 1 en-trée logique.Référence vitesse via l'entrée analog. 1.Sélection référence vitesse ou 1 vitessefixe via 1 entrée logique.Inversion sens de rotation via 1 entrée lo-gique.
Mode automatique :Démarrage et arrêt du variateur via 1 en-trée logique.Référence vitesse via l'entrée analog. 2.Inversion sens de rotation via 1 entrée lo-gique.
2 entrées logiques pour arrêt d'urgence etréarmement défaut.
Macro 4: Manuel/MotoPotDémarrage et arrêt du variateur via 1 entréelogique.Jog via 1 entrée logique.Référence vitesse via l'entrée analogique 1.Inversion sens de rotation via 1 entrée log.Fonction moto-potentiomètre via 2 entrées lo-giques.Sélection référence vitesse ou motopot. via 1entrée logique.2 entrées logiques pour arrêt d'urgence etréarmement défaut.
Macro 5: JoggingMise sous/hors tension du variateur et ordrede marche via 2 entrées logiques.Référence vitesse via l'entrée analog. 1.Référence supplém. via l'entrée analog. 2.Jog via 2 entrées log.Inversion sens de rotation via 1 entrée log.2 entrées logiques pour arrêt d'urgence etréarmement défaut.
Macro 6: MotopotentiomètreMise sous/hors tension du variateur et ordrede marche via 2 entrées logiques.Inversion du sens de rotation via 1 entrée lo-gique.Vitesse mini peut être activée via 1 entrée lo-gique.Fonction motopot via 2 entrées logiques.2 entrées logiques pour arrêt d'urgence etréarmement défaut.
Macro 7: Inversion champ externeMise sous/hors tension du variateur et ordrede marche via 2 entrées logiques.Référence vitesse via l'entrée analog. 1.Limitation couple ext. via entrée analog. 2.Vitesse mini peut être activée via 1 entrée lo-gique.Inversion de champ externe peut être activéevia 1 entrée logique.2 entrées logiques pour événements externes(alarme/défaut).2 entrées logiques pour arrêt d'urgence etréarmement défaut.
Macro 8: Régulation de coupleMise sous/hors tension du variateur et ordrede marche via 2 entrées logiques.Référence couple via l'entrée analogique 1.Inversion sens de rotation via 1 entrée log.2 entrées logiques pour événements externes(1 x alarme/1 x défaut).2 entrées logiques pour arrêt d'urgence etréarmement défaut.
Présentation du logiciel
II K 4-4
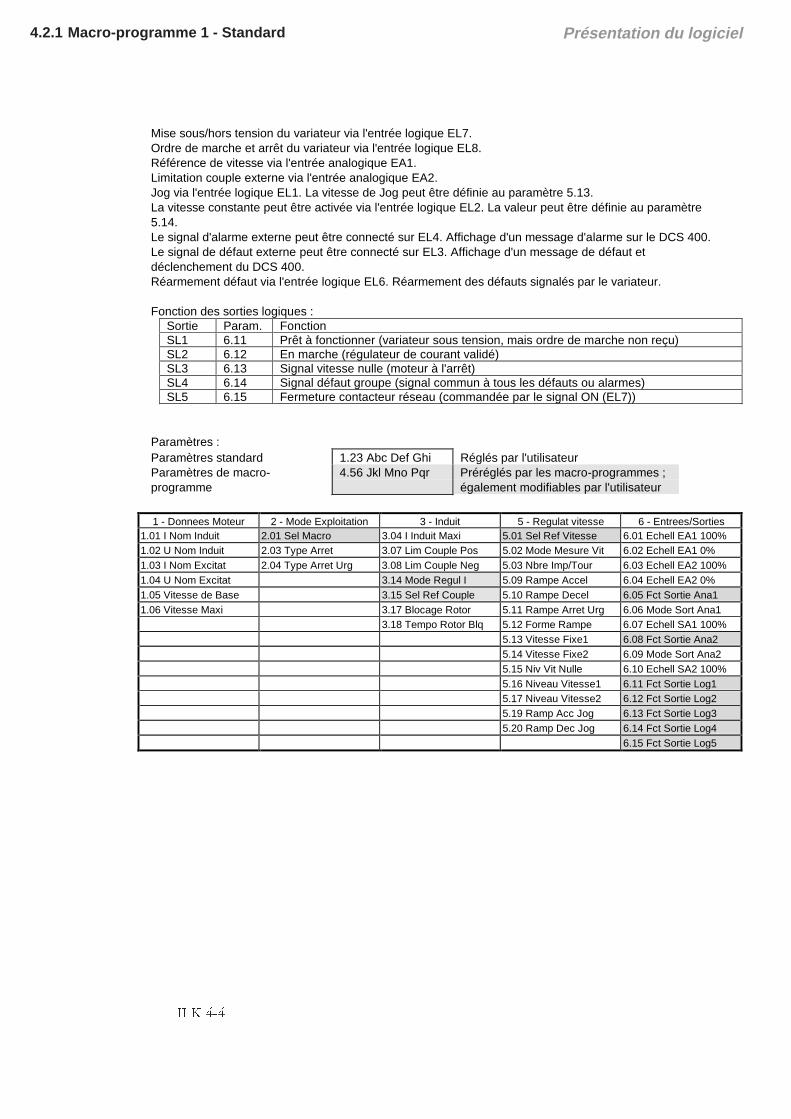
4.2.1 Macro-programme 1 - Standard
Mise sous/hors tension du variateur via l'entrée logique EL7.Ordre de marche et arrêt du variateur via l'entrée logique EL8.Référence de vitesse via l'entrée analogique EA1.Limitation couple externe via l'entrée analogique EA2.Jog via l'entrée logique EL1. La vitesse de Jog peut être définie au paramètre 5.13.La vitesse constante peut être activée via l'entrée logique EL2. La valeur peut être définie au paramètre5.14.Le signal d'alarme externe peut être connecté sur EL4. Affichage d'un message d'alarme sur le DCS 400.Le signal de défaut externe peut être connecté sur EL3. Affichage d'un message de défaut etdéclenchement du DCS 400.Réarmement défaut via l'entrée logique EL6. Réarmement des défauts signalés par le variateur.
Fonction des sorties logiques :Sortie Param. FonctionSL1 6.11 Prêt à fonctionner (variateur sous tension, mais ordre de marche non reçu)SL2 6.12 En marche (régulateur de courant validé)SL3 6.13 Signal vitesse nulle (moteur à l'arrêt)SL4 6.14 Signal défaut groupe (signal commun à tous les défauts ou alarmes)SL5 6.15 Fermeture contacteur réseau (commandée par le signal ON (EL7))
Paramètres :Paramètres standard 1.23 Abc Def Ghi Réglés par l'utilisateurParamètres de macro-programme
4.56 Jkl Mno Pqr Préréglés par les macro-programmes ;également modifiables par l'utilisateur
1 - Donnees Moteur 2 - Mode Exploitation 3 - Induit 5 - Regulat vitesse 6 - Entrees/Sorties1.01 I Nom Induit 2.01 Sel Macro 3.04 I Induit Maxi 5.01 Sel Ref Vitesse 6.01 Echell EA1 100%1.02 U Nom Induit 2.03 Type Arret 3.07 Lim Couple Pos 5.02 Mode Mesure Vit 6.02 Echell EA1 0%1.03 I Nom Excitat 2.04 Type Arret Urg 3.08 Lim Couple Neg 5.03 Nbre Imp/Tour 6.03 Echell EA2 100%1.04 U Nom Excitat 3.14 Mode Regul I 5.09 Rampe Accel 6.04 Echell EA2 0%1.05 Vitesse de Base 3.15 Sel Ref Couple 5.10 Rampe Decel 6.05 Fct Sortie Ana11.06 Vitesse Maxi 3.17 Blocage Rotor 5.11 Rampe Arret Urg 6.06 Mode Sort Ana1
3.18 Tempo Rotor Blq 5.12 Forme Rampe 6.07 Echell SA1 100%5.13 Vitesse Fixe1 6.08 Fct Sortie Ana25.14 Vitesse Fixe2 6.09 Mode Sort Ana25.15 Niv Vit Nulle 6.10 Echell SA2 100%5.16 Niveau Vitesse1 6.11 Fct Sortie Log15.17 Niveau Vitesse2 6.12 Fct Sortie Log25.19 Ramp Acc Jog 6.13 Fct Sortie Log35.20 Ramp Dec Jog 6.14 Fct Sortie Log4
6.15 Fct Sortie Log5
Présentation du logiciel
II K 4-5
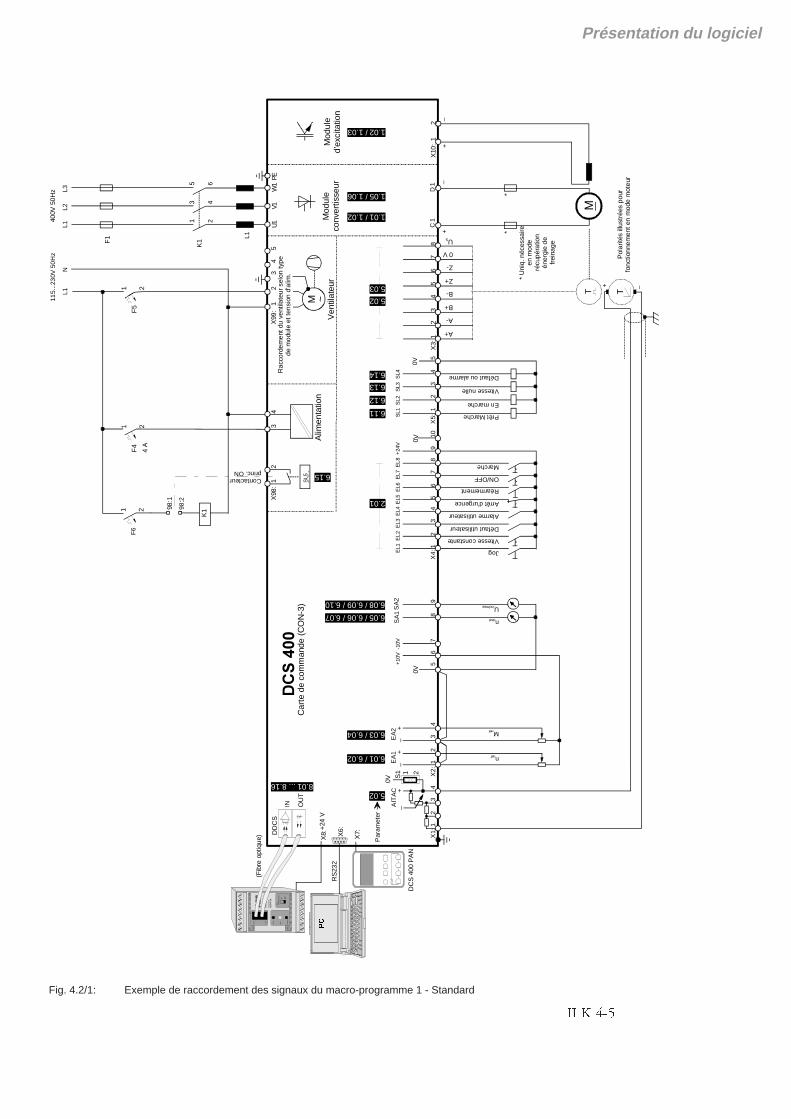
Fig. 4.2/1: Exemple de raccordement des signaux du macro-programme 1 - Standard
Présentation du logiciel
_+
IN OU
T
DC
S 4
00 P
AN
C 1
D 1
X98
:
DO
5
12
34
45
X99
:1
23
U1W
1V1
PE
X10
:1
2
AIT
AC
AI1
AI2
+10
V-1
0VA
O1
AO
2D
I1D
I2D
I3D
I4D
I5D
I6D
I7D
I8+
24V
DO
1D
O2
DO
3D
O4
__
++
TT
K198
:1
98:2
F6
1 2F
4
1 2F
5
1 2
115.
..23
0V 5
0H
z
L1N
L1L2
L3
400V
50H
z
F1
K1
13
5
24
6
L1
M
0V0V
0V
X1:
12
34
12
34
56
78
9X
4:1
23
45
67
89
10X
5:1
23
45
X3:
X2:
+ _
S1 21
DD
CS
Nxx
x-0
1xx
xxxx
xxA
DA
PT
ER
BU
ST
ER
MIN
AT
ION
ON
OFF
RX
D
TX
D
PE
SH
FD
GD
(N)
D(P
)
X1
X2
PE
SH
FD
GD
(N)
D(P
)S
H
XM
IT
RE
C
ER
RO
R
+24
V0V
SH
3&
X7:X6:
X8:
+24
V
RS
232
4 A
0V
M ~
12
34
56
78
'&6
++
__
5.02
6.01 / 6.02
6.03 / 6.04
6.05 / 6.06 / 6.07
6.08 / 6.09 / 6.10
2.01
6.11
6.12
6.13
6.14
5.02
5.03
1.01 / 1.02
1.05 / 1.06
1.02 / 1.03
8.01 ... 8.16
6.15
Par
amet
er
A+
A-
B+
B-
Z+
Z-
0 V
US
**
Car
te d
e co
mm
ande
(C
ON
-3)
Mod
ule
conv
ertis
seur
Mod
ule
d’ex
cita
tion
Pol
arité
s ill
ustr
ées
pour
fonc
tionn
emen
t en
mod
e m
oteu
r
(Fib
re o
ptiq
ue)
Rac
cord
emen
t du
vent
ilate
ur s
elon
type
de m
odul
e et
tens
ion
d'al
im.
Alim
enta
tion
Ven
tilat
eur
nréf
Mréf
nréel
Uindmes
Jog
Vitesse constante
Défaut utilisateur
Alarme utilisateur
Arrêt d'urgence
Réarmement
ON/OFF
Marche
Prêt Marche
En marche
Vitesse nulle
Défaut ou alarme
Contacteurprinc. ON
* U
niq.
néc
essa
ireen
mod
e ré
cupé
ratio
nén
ergi
e de
frei
nage
EA
1E
A2
EL1
EL
2E
L3E
L4E
L5E
L6E
L7E
L8
SL1
SL2
SL4
SL3
SA
1S
A2
SL5
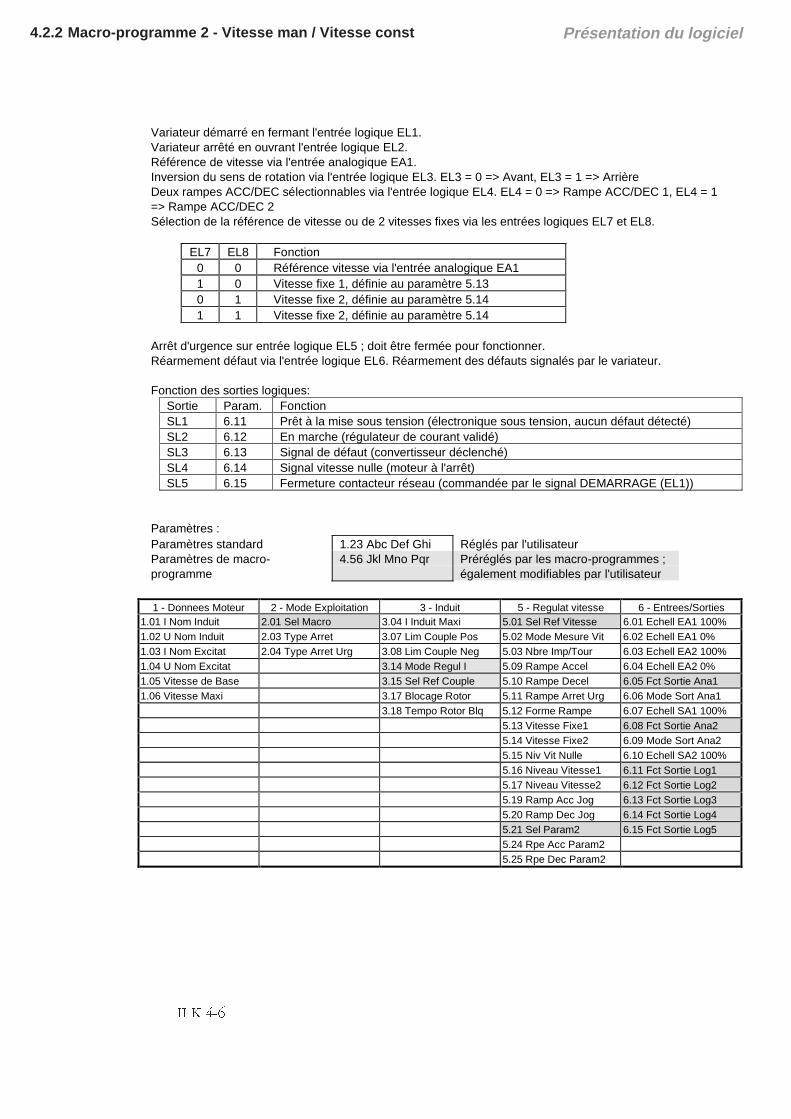
4.2.2 Macro-programme 2 - Vitesse man / Vitesse const
II K 4-6
1 - Donnees Moteur 2 - Mode Exploitation 3 - Induit 5 - Regulat vitesse 6 - Entrees/Sorties1.01 I Nom Induit 2.01 Sel Macro 3.04 I Induit Maxi 5.01 Sel Ref Vitesse 6.01 Echell EA1 100%1.02 U Nom Induit 2.03 Type Arret 3.07 Lim Couple Pos 5.02 Mode Mesure Vit 6.02 Echell EA1 0%1.03 I Nom Excitat 2.04 Type Arret Urg 3.08 Lim Couple Neg 5.03 Nbre Imp/Tour 6.03 Echell EA2 100%1.04 U Nom Excitat 3.14 Mode Regul I 5.09 Rampe Accel 6.04 Echell EA2 0%1.05 Vitesse de Base 3.15 Sel Ref Couple 5.10 Rampe Decel 6.05 Fct Sortie Ana11.06 Vitesse Maxi 3.17 Blocage Rotor 5.11 Rampe Arret Urg 6.06 Mode Sort Ana1
3.18 Tempo Rotor Blq 5.12 Forme Rampe 6.07 Echell SA1 100%5.13 Vitesse Fixe1 6.08 Fct Sortie Ana25.14 Vitesse Fixe2 6.09 Mode Sort Ana25.15 Niv Vit Nulle 6.10 Echell SA2 100%5.16 Niveau Vitesse1 6.11 Fct Sortie Log15.17 Niveau Vitesse2 6.12 Fct Sortie Log25.19 Ramp Acc Jog 6.13 Fct Sortie Log35.20 Ramp Dec Jog 6.14 Fct Sortie Log45.21 Sel Param2 6.15 Fct Sortie Log55.24 Rpe Acc Param25.25 Rpe Dec Param2
Variateur démarré en fermant l'entrée logique EL1.Variateur arrêté en ouvrant l'entrée logique EL2.Référence de vitesse via l'entrée analogique EA1.Inversion du sens de rotation via l'entrée logique EL3. EL3 = 0 => Avant, EL3 = 1 => ArrièreDeux rampes ACC/DEC sélectionnables via l'entrée logique EL4. EL4 = 0 => Rampe ACC/DEC 1, EL4 = 1=> Rampe ACC/DEC 2Sélection de la référence de vitesse ou de 2 vitesses fixes via les entrées logiques EL7 et EL8.
EL7 EL8 Fonction0 0 Référence vitesse via l'entrée analogique EA11 0 Vitesse fixe 1, définie au paramètre 5.130 1 Vitesse fixe 2, définie au paramètre 5.141 1 Vitesse fixe 2, définie au paramètre 5.14
Arrêt d'urgence sur entrée logique EL5 ; doit être fermée pour fonctionner.Réarmement défaut via l'entrée logique EL6. Réarmement des défauts signalés par le variateur.
Fonction des sorties logiques:Sortie Param. FonctionSL1 6.11 Prêt à la mise sous tension (électronique sous tension, aucun défaut détecté)SL2 6.12 En marche (régulateur de courant validé)SL3 6.13 Signal de défaut (convertisseur déclenché)SL4 6.14 Signal vitesse nulle (moteur à l'arrêt)SL5 6.15 Fermeture contacteur réseau (commandée par le signal DEMARRAGE (EL1))
Paramètres :Paramètres standard 1.23 Abc Def Ghi Réglés par l'utilisateurParamètres de macro-programme
4.56 Jkl Mno Pqr Préréglés par les macro-programmes ;également modifiables par l'utilisateur
Présentation du logiciel

Fig. 4.2/2: Exemple de raccordement des signaux du macro-programme 2 - Vitesse man / Vitesse const
II K 4-7
Présentation du logiciel
_+
IN OU
T
C 1
D 1
X98
:
DO
5
12
34
45
X99
:1
23
U1W
1V1
PE
X10
:1
2
AIT
AC
AI1
AI2
+10
V-1
0VA
O1
AO
2D
I1D
I2D
I3D
I4D
I5D
I6D
I7D
I8+
24V
DO
1D
O2
DO
3D
O4
__
++
TT
K198
:1
98:2
F6
1 2F
4
1 2F
5
1 2
115.
..23
0V 5
0H
z
L1N
L1L2
L3
400V
50H
z
F1
K1
13
5
24
6
L1
M
0V0V
0V
X1:
12
34
12
34
56
78
9X
4:1
23
45
67
89
10X
5:1
23
45
X3:
X2:
+ _
S1 21
DD
CS
Nxx
x-0
1xx
xxxx
xxA
DA
PT
ER
BU
ST
ER
MIN
AT
ION
ON
OFF
RX
D
TX
D
PE
SH
FD
GD
(N)
D(P
)
X1
X2
PE
SH
FD
GD
(N)
D(P
)S
H
XM
IT
RE
C
ER
RO
R
+24
V0V
SH
3&
X7:X6:
X8:
+24
V
RS
232
4 A
0V
M ~
12
34
56
78
'&6
++
__
5.02
6.01 / 6.02
6.03 / 6.04
6.05 / 6.06 / 6.07
6.08 / 6.09 / 6.10
2.01
6.11
6.12
6.13
6.14
5.02
5.03
1.01 / 1.02
1.05 / 1.06
1.02 / 1.03
8.01 ... 8.16
6.15
Par
amet
er
A+
A-
B+
B-
Z+
Z-
0 V
US
DC
S 4
00 P
AN
**
Car
te d
e co
mm
ande
(C
ON
-3)
Mod
ule
conv
ertis
seur
Mod
ule
d’ex
cita
tion
Pol
arité
s ill
ustr
ées
pour
fonc
tionn
emen
t en
mod
e m
oteu
r
(Fib
re o
ptiq
ue)
Rac
cord
emen
t du
vent
ilate
ur s
elon
type
de m
odul
e et
tens
ion
d'al
im.
Alim
enta
tion
Ven
tilat
eur
nréf
nréel
Uindmes
Démarrage
Arrêt
Sens de rotation
Rampe 1 / Rampe 2
Arrêt d'urgence
Réarmement
Vitesse fixe 1
Vitesse fixe 2
Prêt Marche
En marche
Défaut
Vitesse nulle
Contacteurprinc. ON
* U
niq.
néc
essa
ireen
mod
e ré
cupé
ratio
nén
ergi
e de
frei
nage
EA
1E
A2
EL1
EL
2E
L3E
L4E
L5E
L6E
L7
EL
8S
L1S
L2S
L4S
L3S
A1
SA
2
SL5

4.2.3 Macro-programme 3 - Manuel / Auto
II K 4-8
Permutation entre mode manuel et mode automatique commandée par l'entrée logique EL2EL2 = "0" => Mode manuelLe variateur est démarré et arrêté via l'entrée logique EL1Référence vitesse via l'entrée analogique EA1Inversion du sens de rotation via l'entrée logique EL3Sélection de la référence vitesse ou d'une vitesse fixe via l'entrée logique EL4
EL4 Fonction0 Référence vitesse via l'entrée analogique EA11 Vitesse fixe 1, définie au paramètre 5.13
EL2 = "1" => Mode automatiqueLe variateur est démarré et arrêté via l'entrée logique EL8Référence vitesse reçue de l'API via l'entrée analogique EA2Inversion du sens de rotation via l'entrée logique EL7
Arrêt d'urgence sur entrée logique EL5 ; doit être fermée pour fonctionnerRéarmement défaut via l'entrée logique EL6. Réarmement des défauts signalés par le variateur.
Fonction des sorties logiques :Sortie Param. FonctionSL1 6.11 Prêt à la mise sous tension (électronique sous tension, aucun défaut détecté)SL2 6.12 En marche (régulateur de courant validé)SL3 6.13 Signal de défaut (convertisseur déclenché)SL4 6.14 Signal vitesse nulle (moteur à l'arrêt)SL5 6.15 Fermeture contacteur réseau (commandée par le signal DEMARRAGE (EL1/EL8))
Paramètres :Paramètres standard 1.23 Abc Def Ghi Réglés par l'utilisateurParamètres de macro-programme
4.56 Jkl Mno Pqr Préréglés par les macro-programmes ;également modifiables par l'utilisateur
1 - Donnees Moteur 2 - Mode Exploitation 3 - Induit 5 - Regulat vitesse 6 - Entrees/Sorties1.01 I Nom Induit 2.01 Sel Macro 3.04 I Induit Maxi 5.01 Sel Ref Vitesse 6.01 Echell EA1 100%1.02 U Nom Induit 2.03 Type Arret 3.07 Lim Couple Pos 5.02 Mode Mesure Vit 6.02 Echell EA1 0%1.03 I Nom Excitat 2.04 Type Arret Urg 3.08 Lim Couple Neg 5.03 Nbre Imp/Tour 6.03 Echell EA2 100%1.04 U Nom Excitat 3.14 Mode Regul I 5.09 Rampe Accel 6.04 Echell EA2 0%1.05 Vitesse de Base 3.15 Sel Ref Couple 5.10 Rampe Decel 6.05 Fct Sortie Ana11.06 Vitesse Maxi 3.17 Blocage Rotor 5.11 Rampe Arret Urg 6.06 Mode Sort Ana1
3.18 Tempo Rotor Blq 5.12 Forme Rampe 6.07 Echell SA1 100%5.13 Vitesse Fixe1 6.08 Fct Sortie Ana25.15 Niv Vit Nulle 6.09 Mode Sort Ana25.16 Niveau Vitesse1 6.10 Echell SA2 100%5.17 Niveau Vitesse2 6.11 Fct Sortie Log15.19 Ramp Acc Jog 6.12 Fct Sortie Log25.20 Ramp Dec Jog 6.13 Fct Sortie Log3
6.14 Fct Sortie Log46.15 Fct Sortie Log5
Présentation du logiciel

Fig. 4.2/3: Exemple de raccordement des signaux du macro-programme 3 - Manuel / Auto
II K 4-9
Présentation du logiciel
_+
IN OU
T
C 1
D 1
X98
:
DO
5
12
34
45
X99
:1
23
U1W
1V1
PE
X10
:1
2
AIT
AC
AI1
AI2
+10
V-1
0VA
O1
AO
2D
I1D
I2D
I3D
I4D
I5D
I6D
I7D
I8+
24V
DO
1D
O2
DO
3D
O4
__
++
TT
K198
:1
98:2
F6
1 2F
4
1 2F
5
1 2
115.
..23
0V 5
0H
z
L1N
L1L2
L3
400V
50H
z
F1
K1
13
5
24
6
L1
M
0V0V
0V
X1:
12
34
12
34
56
78
9X
4:1
23
45
67
89
10X
5:1
23
45
X3:
X2:
+ _
S1 21
DD
CS
Nxx
x-0
1xx
xxxx
xxA
DA
PT
ER
BU
ST
ER
MIN
AT
ION
ON
OFF
RX
D
TX
D
PE
SH
FD
GD
(N)
D(P
)
X1
X2
PE
SH
FD
GD
(N)
D(P
)S
H
XM
IT
RE
C
ER
RO
R
+24
V0V
SH
3&
X7:X6:
X8:
+24
V
RS
232
4 A
0V
M ~
12
34
56
78
'&6
++
__
5.02
6.01 / 6.02
6.03 / 6.04
6.05 / 6.06 / 6.07
6.08 / 6.09 / 6.10
2.01
6.11
6.12
6.13
6.14
5.02
5.03
1.01 / 1.02
1.05 / 1.06
1.02 / 1.03
8.01 ... 8.16
6.15
Par
amet
er
A+
A-
B+
B-
Z+
Z-
0 V
US
DC
S 4
00 P
AN
**
Car
te d
e co
mm
ande
(C
ON
-3)
Mod
ule
conv
ertis
seur
Mod
ule
d’ex
cita
tion
Pol
arité
s ill
ustr
ées
pour
fonc
tionn
emen
t en
mod
e m
oteu
r
(Fib
re o
ptiq
ue)
Rac
cord
emen
t du
vent
ilate
ur s
elon
type
de m
odul
e et
tens
ion
d'al
im.
Alim
enta
tion
Ven
tilat
eur
nréf Manuel
nréel
Uindmes
Démarr/arrêt manuel
Manuel / Auto
Sens de rot. manuel
Vitesse fixe / EA1
Arrêt d'urgence
Réarmement
Sens de rot. auto
Démarr/arrêt auto
Prêt ON
En marche
Défaut
Vitesse nulle
Contacteurprinc. ON
* U
niq.
néc
essa
ireen
mod
e ré
cupé
ratio
nén
ergi
e de
frei
nage
EA
1E
A2
EL1
EL
2E
L3E
L4E
L5E
L6E
L7
EL
8S
L1S
L2S
L4S
L3S
A1
SA
2
SL5
AP
I
nréf Auto

4.2.4 Macro-programme 4 - Manuel / MotoPot
II K 4-10
Le variateur est démarré et arrêté via l'entrée logique EL1Jog via l'entrée logique EL2. La vitesse de Jog peut être définie au paramètre 5.13Référence vitesse via l'entrée analogique EA1Inversion du sens de rotation via l'entrée logique EL3Fonction potentiomètre motorisé via les entrées logiques EL7 (+ vite) et EL8 (- vite)Sélection de la référence vitesse ou de la fonction de potentiomètre motorisé via l'entrée logique EL4
EL4 Fonction0 Référence vitesse via l'entrée analogique EA11 Fonction potentiomètre motorisé via EL7 et EL8
Arrêt d'urgence sur l'entrée logique EL5 ; doit être fermée pour fonctionnerRéarmement défaut via l'entrée logique EL6. Réarmement des défauts signalés par le variateur.
Fonction des sorties logiques :Sortie Param. FonctionSL1 6.11 Prêt pour la mise sous tension (électronique sous tension, aucun défaut détecté)SL2 6.12 En marche (régulateur de courant validé)SL3 6.13 Signal de défaut (convertisseur déclenché)SL4 6.14 Signal vitesse nulle (moteur à l'arrêt)SL5 6.15 Fermeture contacteur réseau (commandée par le signal DEMARRAGE (EL1))
Paramètres :Paramètres standard 1.23 Abc Def Ghi Réglés par l'utilisateurParamètres de macro-programme
4.56 Jkl Mno Pqr Préréglés par les macro-programmes ;également modifiables par l'utilisateur
1 - Donnees Moteur 2 - Mode Exploitation 3 - Induit 5 - Regulat vitesse 6 - Entrees/Sorties1.01 I Nom Induit 2.01 Sel Macro 3.04 I Induit Maxi 5.01 Sel Ref Vitesse 6.01 Echell EA1 100%1.02 U Nom Induit 2.03 Type Arret 3.07 Lim Couple Pos 5.02 Mode Mesure Vit 6.02 Echell EA1 0%1.03 I Nom Excitat 2.04 Type Arret Urg 3.08 Lim Couple Neg 5.03 Nbre Imp/Tour 6.03 Echell EA2 100%1.04 U Nom Excitat 3.14 Mode Regul I 5.09 Rampe Accel 6.04 Echell EA2 0%1.05 Vitesse de Base 3.15 Sel Ref Couple 5.10 Rampe Decel 6.05 Fct Sortie Ana11.06 Vitesse Maxi 3.17 Blocage Rotor 5.11 Rampe Arret Urg 6.06 Mode Sort Ana1
3.18 Tempo Rotor Blq 5.12 Forme Rampe 6.07 Echell SA1 100%5.13 Vitesse Fixe1 6.08 Fct Sortie Ana25.14 Vitesse Fixe2 6.09 Mode Sort Ana25.15 Niv Vit Nulle 6.10 Echell SA2 100%5.16 Niveau Vitesse1 6.11 Fct Sortie Log15.17 Niveau Vitesse2 6.12 Fct Sortie Log25.19 Ramp Acc Jog 6.13 Fct Sortie Log35.20 Ramp Dec Jog 6.14 Fct Sortie Log4
6.15 Fct Sortie Log5
Présentation du logiciel
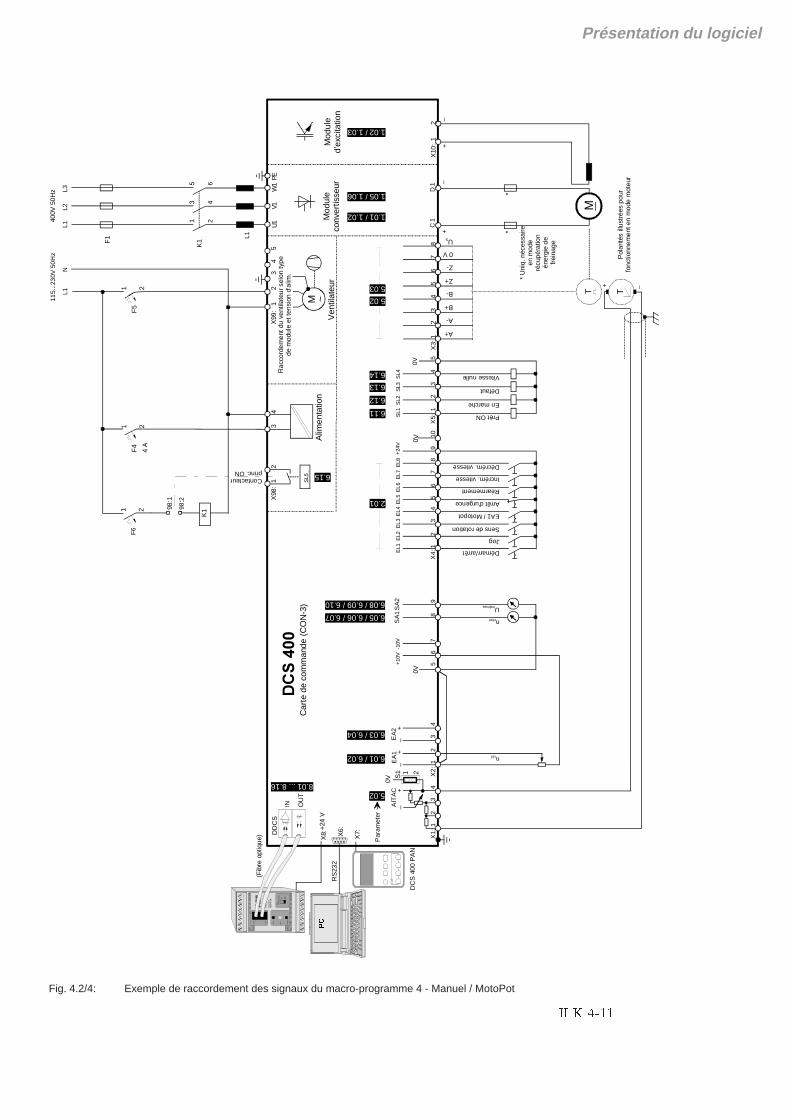
Fig. 4.2/4: Exemple de raccordement des signaux du macro-programme 4 - Manuel / MotoPot
II K 4-11
Présentation du logiciel
_+
IN OU
T
C 1
D 1
X98
:
DO
5
12
34
45
X99
:1
23
U1W
1V1
PE
X10
:1
2
AIT
AC
AI1
AI2
+10
V-1
0VA
O1
AO
2D
I1D
I2D
I3D
I4D
I5D
I6D
I7D
I8+
24V
DO
1D
O2
DO
3D
O4
__
++
TT
K198
:1
98:2
F6
1 2F
4
1 2F
5
1 2
115.
..23
0V 5
0H
z
L1N
L1L2
L3
400V
50H
z
F1
K1
13
5
24
6
L1
M
0V0V
0V
X1:
12
34
12
34
56
78
9X
4:1
23
45
67
89
10X
5:1
23
45
X3:
X2:
+ _
S1 21
DD
CS
Nxx
x-0
1xx
xxxx
xxA
DA
PT
ER
BU
ST
ER
MIN
AT
ION
ON
OFF
RX
D
TX
D
PE
SH
FD
GD
(N)
D(P
)
X1
X2
PE
SH
FD
GD
(N)
D(P
)S
H
XM
IT
RE
C
ER
RO
R
+24
V0V
SH
3&
X7:X6:
X8:
+24
V
RS
232
4 A
0V
M ~
12
34
56
78
'&6
++
__
5.02
6.01 / 6.02
6.03 / 6.04
6.05 / 6.06 / 6.07
6.08 / 6.09 / 6.10
2.01
6.11
6.12
6.13
6.14
5.02
5.03
1.01 / 1.02
1.05 / 1.06
1.02 / 1.03
8.01 ... 8.16
6.15
Par
amet
er
A+
A-
B+
B-
Z+
Z-
0 V
US
DC
S 4
00 P
AN
**
Car
te d
e co
mm
ande
(C
ON
-3)
Mod
ule
conv
ertis
seur
Mod
ule
d’ex
cita
tion
Pol
arité
s ill
ustr
ées
pour
fonc
tionn
emen
t en
mod
e m
oteu
r
(Fib
re o
ptiq
ue)
Rac
cord
emen
t du
vent
ilate
ur s
elon
type
de m
odul
e et
tens
ion
d'al
im.
Alim
enta
tion
Ven
tilat
eur
nréf
nréel
Uindmes
Démarr/arrêt
Jog
Sens de rotation
EA1 / Motopot
Arrêt d'urgence
Réarmement
Incrém. vitesse
Décrém. vitesse
Prêt ON
En marche
Défaut
Vitesse nulle
Contacteurprinc. ON
* U
niq.
néc
essa
ireen
mod
e ré
cupé
ratio
nén
ergi
e de
frei
nage
EA
1E
A2
EL1
EL2
EL
3E
L4
EL
5E
L6
EL7
EL8
SL1
SL2
SL4
SL3
SA
1S
A2
SL5

4.2.5 Macro-programme 5 - Jogging
II K 4-12
Mise sous/hors tension du variateur via l'entrée logique EL7.Ordre de marche et arrêt du variateur via l'entrée logique EL8.Référence de vitesse via l'entrée analogique EA1.Référence supplémentaire via l'entrée analogique EA22 vitesses de Jog sélectionnables via les entrées logiques EL2 et EL3
EL2 EL3 Fonction0 0 Référence vitesse via l'entrée analogique EA11 0 Vitesse fixe 1, définie au paramètre 5.130 1 Vitesse fixe 2, définie au paramètre 5.141 1 Vitesse fixe 2
Inversion du sens de rotation via l'entrée logique EL1.Arrêt d'urgence sur l'entrée logique EL5 ; doit être fermée pour fonctionner.Réarmement défaut via l'entrée logique EL6. Réarmement des défauts signalés par le variateur.
Fonction des sorties logiques :Sortie Param. FonctionSL1 6.11 Prêt à fonctionner (variateur sous tension, mais ordre de marche non reçu)SL2 6.12 Signal vitesse nulle (moteur à l'arrêt)SL3 6.13 Niveau vitesse 1 atteint (vitesse définie au paramètre 5.16)SL4 6.14 Signal défaut groupe (signal commun à tous les défauts ou alarmes)SL5 6.15 Fermeture contacteur réseau (commandée par le signal ON (EL7))
Paramètres :Paramètres standard 1.23 Abc Def Ghi Réglés par l'utilisateurParamètres de macro-programme
4.56 Jkl Mno Pqr Préréglés par les macro-programmes ;également modifiables par l'utilisateur
1 - Donnees Moteur 2 - Mode Exploitation 3 - Induit 5 - Regulat vitesse 6 - Entrees/Sorties1.01 I Nom Induit 2.01 Sel Macro 3.04 I Induit Maxi 5.01 Sel Ref Vitesse 6.01 Echell EA1 100%1.02 U Nom Induit 2.03 Type Arret 3.07 Lim Couple Pos 5.02 Mode Mesure Vit 6.02 Echell EA1 0%1.03 I Nom Excitat 2.04 Type Arret Urg 3.08 Lim Couple Neg 5.03 Nbre Imp/Tour 6.03 Echell EA2 100%1.04 U Nom Excitat 3.14 Mode Regul I 5.09 Rampe Accel 6.04 Echell EA2 0%1.05 Vitesse de Base 3.15 Sel Ref Couple 5.10 Rampe Decel 6.05 Fct Sortie Ana11.06 Vitesse Maxi 3.17 Blocage Rotor 5.11 Rampe Arret Urg 6.06 Mode Sort Ana1
3.18 Tempo Rotor Blq 5.12 Forme Rampe 6.07 Echell SA1 100%5.13 Vitesse Fixe1 6.08 Fct Sortie Ana25.14 Vitesse Fixe2 6.09 Mode Sort Ana25.15 Niv Vit Nulle 6.10 Echell SA2 100%5.16 Niveau Vitesse1 6.11 Fct Sortie Log15.17 Niveau Vitesse2 6.12 Fct Sortie Log25.19 Ramp Acc Jog 6.13 Fct Sortie Log35.20 Ramp Dec Jog 6.14 Fct Sortie Log4
6.15 Fct Sortie Log5
Présentation du logiciel

Fig. 4.2/5: Exemple de raccordement des signaux du macro-programme 5 - Jogging
II K 4-13
Présentation du logiciel
_+
IN OU
T
C 1
D 1
X98
:
DO
5
12
34
45
X99
:1
23
U1W
1V1
PE
X10
:1
2
AIT
AC
AI1
AI2
+10
V-1
0VA
O1
AO
2D
I1D
I2D
I3D
I4D
I5D
I6D
I7D
I8+
24V
DO
1D
O2
DO
3D
O4
__
++
TT
K198
:1
98:2
F6
1 2F
4
1 2F
5
1 2
115.
..23
0V 5
0H
z
L1N
L1L2
L3
400V
50H
z
F1
K1
13
5
24
6
L1
M
0V0V
0V
X1:
12
34
12
34
56
78
9X
4:1
23
45
67
89
10X
5:1
23
45
X3:
X2:
+ _
S1 21
DD
CS
Nxx
x-0
1xx
xxxx
xxA
DA
PT
ER
BU
ST
ER
MIN
AT
ION
ON
OFF
RX
D
TX
D
PE
SH
FD
GD
(N)
D(P
)
X1
X2
PE
SH
FD
GD
(N)
D(P
)S
H
XM
IT
RE
C
ER
RO
R
+24
V0V
SH
3&
X7:X6:
X8:
+24
V
RS
232
4 A
0V
M ~
12
34
56
78
'&6
++
__
5.02
6.01 / 6.02
6.03 / 6.04
6.05 / 6.06 / 6.07
6.08 / 6.09 / 6.10
2.01
6.11
6.12
6.13
6.14
5.02
5.03
1.01 / 1.02
1.05 / 1.06
1.02 / 1.03
8.01 ... 8.16
6.15
Par
amet
er
A+
A-
B+
B-
Z+
Z-
0 V
US
DC
S 4
00 P
AN
**
Car
te d
e co
mm
ande
(C
ON
-3)
Mod
ule
conv
ertis
seur
Mod
ule
d’ex
cita
tion
Pol
arité
s ill
ustr
ées
pour
fonc
tionn
emen
t en
mod
e m
oteu
r
(Fib
re o
ptiq
ue)
Rac
cord
emen
t du
vent
ilate
ur s
elon
type
de m
odul
e et
tens
ion
d'al
im.
Alim
enta
tion
Ven
tilat
eur
nréf
nréel
Mmes
Sens de rotation
Jog 1
Jog 2
Arrêt d'urgence
Réarmement
ON/OFF
Marche
Prêt Marche
Vitesse nulle
Niv. vitesse atteint
Défaut ou alarme
Contacteurprinc. ON
* U
niq.
néc
essa
ireen
mod
e ré
cupé
ratio
nén
ergi
e de
frei
nage
EA
1E
A2
EL1
EL2
EL3
EL
4E
L5E
L6
EL7
EL8
SL1
SL2
SL4
SL3
SA
1S
A2
SL5
Réf suppl

4.2.6 Macro-programme 6 - MotoPot
II K 4-14
Mise sous/hors tension du variateur via l'entrée logique EL7.Ordre de marche et arrêt du variateur via l'entrée logique EL8.Inversion du sens de rotation via l'entrée logique EL1La vitesse constante peut être activée via l'entrée logique EL4.Fonction potentiomètre motorisé via les entrées logiques EL2 (+ vite) et EL3 (- vite).Arrêt d'urgence sur l'entrée logique EL5 ; doit être fermée pour fonctionner.Réarmement défaut via l'entrée logique EL6. Réarmement des défauts signalés par le variateur.
Fonction des sorties logiques :Sortie Param. FonctionSL1 6.11 Prêt à fonctionner (variateur sous tension, mais ordre de marche non reçu)SL2 6.12 nmax atteinte (nmax définie au paramètre 5.16)SL3 6.13 nmin atteinte (nmin définie au paramètre 5.17)SL4 6.14 Signal défaut groupe (signal commun à tous les défauts ou alarmes)SL5 6.15 Fermeture contacteur réseau (commandée par le signal ON (EL7))
Paramètres :Paramètres standard 1.23 Abc Def Ghi Réglés par l'utilisateurParamètres de macro-programme
4.56 Jkl Mno Pqr Préréglés par les macro-programmes ;également modifiables par l'utilisateur
1 - Donnees Moteur 2 - Mode Exploitation 3 - Induit 5 - Regulat vitesse 6 - Entrees/Sorties1.01 I Nom Induit 2.01 Sel Macro 3.04 I Induit Maxi 5.01 Sel Ref Vitesse 6.01 Echell EA1 100%1.02 U Nom Induit 2.03 Type Arret 3.07 Lim Couple Pos 5.02 Mode Mesure Vit 6.02 Echell EA1 0%1.03 I Nom Excitat 2.04 Type Arret Urg 3.08 Lim Couple Neg 5.03 Nbre Imp/Tour 6.03 Echell EA2 100%1.04 U Nom Excitat 3.14 Mode Regul I 5.09 Rampe Accel 6.04 Echell EA2 0%1.05 Vitesse de Base 3.15 Sel Ref Couple 5.10 Rampe Decel 6.05 Fct Sortie Ana11.06 Vitesse Maxi 3.17 Blocage Rotor 5.11 Rampe Arret Urg 6.06 Mode Sort Ana1
3.18 Tempo Rotor Blq 5.12 Forme Rampe 6.07 Echell SA1 100%5.13 Vitesse Fixe1 6.08 Fct Sortie Ana25.14 Vitesse Fixe2 6.09 Mode Sort Ana25.15 Niv Vit Nulle 6.10 Echell SA2 100%5.16 Niveau Vitesse1 6.11 Fct Sortie Log15.17 Niveau Vitesse2 6.12 Fct Sortie Log25.19 Ramp Acc Jog 6.13 Fct Sortie Log35.20 Ramp Dec Jog 6.14 Fct Sortie Log4
6.15 Fct Sortie Log5
Présentation du logiciel

Fig. 4.2/6: Exemple de raccordement des signaux du macro-programme 6 - MotoPot
II K 4-15
Présentation du logiciel
_+
IN OU
T
C 1
D 1
X98
:
DO
5
12
34
45
X99
:1
23
U1W
1V1
PE
X10
:1
2
AIT
AC
AI1
AI2
+10
V-1
0VA
O1
AO
2D
I1D
I2D
I3D
I4D
I5D
I6D
I7D
I8+
24V
DO
1D
O2
DO
3D
O4
__
++
TT
K198
:1
98:2
F6
1 2F
4
1 2F
5
1 2
115.
..23
0V 5
0H
z
L1N
L1L2
L3
400V
50H
z
F1
K1
13
5
24
6
L1
M
0V0V
0V
X1:
12
34
12
34
56
78
9X
4:1
23
45
67
89
10X
5:1
23
45
X3:
X2:
+ _
S1 21
DD
CS
Nxx
x-0
1xx
xxxx
xxA
DA
PT
ER
BU
ST
ER
MIN
AT
ION
ON
OFF
RX
D
TX
D
PE
SH
FD
GD
(N)
D(P
)
X1
X2
PE
SH
FD
GD
(N)
D(P
)S
H
XM
IT
RE
C
ER
RO
R
+24
V0V
SH
3&
X7:X6:
X8:
+24
V
RS
232
4 A
0V
M ~
12
34
56
78
'&6
++
__
5.02
6.01 / 6.02
6.03 / 6.04
6.05 / 6.06 / 6.07
6.08 / 6.09 / 6.10
2.01
6.11
6.12
6.13
6.14
5.02
5.03
1.01 / 1.02
1.05 / 1.06
1.02 / 1.03
8.01 ... 8.16
6.15
Par
amet
er
A+
A-
B+
B-
Z+
Z-
0 V
US
DC
S 4
00 P
AN
**
Car
te d
e co
mm
ande
(C
ON
-3)
Mod
ule
conv
ertis
seur
Mod
ule
d’ex
cita
tion
Pol
arité
s ill
ustr
ées
pour
fonc
tionn
emen
t en
mod
e m
oteu
r
(Fib
re o
ptiq
ue)
Rac
cord
emen
t du
vent
ilate
ur s
elon
type
de m
odul
e et
tens
ion
d'al
im.
Alim
enta
tion
Ven
tilat
eur
nréel
Uindmes
Sens de rotation
Inrém. vitesse
Décrém. vitesse
Arrêt d'urgence
Réarmement
ON/OFF
Marche
Prêt Marche
nmaxi atteinte
nmini atteinte
Défaut ou alarme
Contacteurprinc. ON
* U
niq.
néc
essa
ireen
mod
e ré
cupé
ratio
nén
ergi
e de
frei
nage
EA
1E
A2
EL1
EL
2E
L3E
L4E
L5E
L6E
L7E
L8
SL1
SL2
SL4
SL3
SA
1S
A2
SL5
Vitesse constante
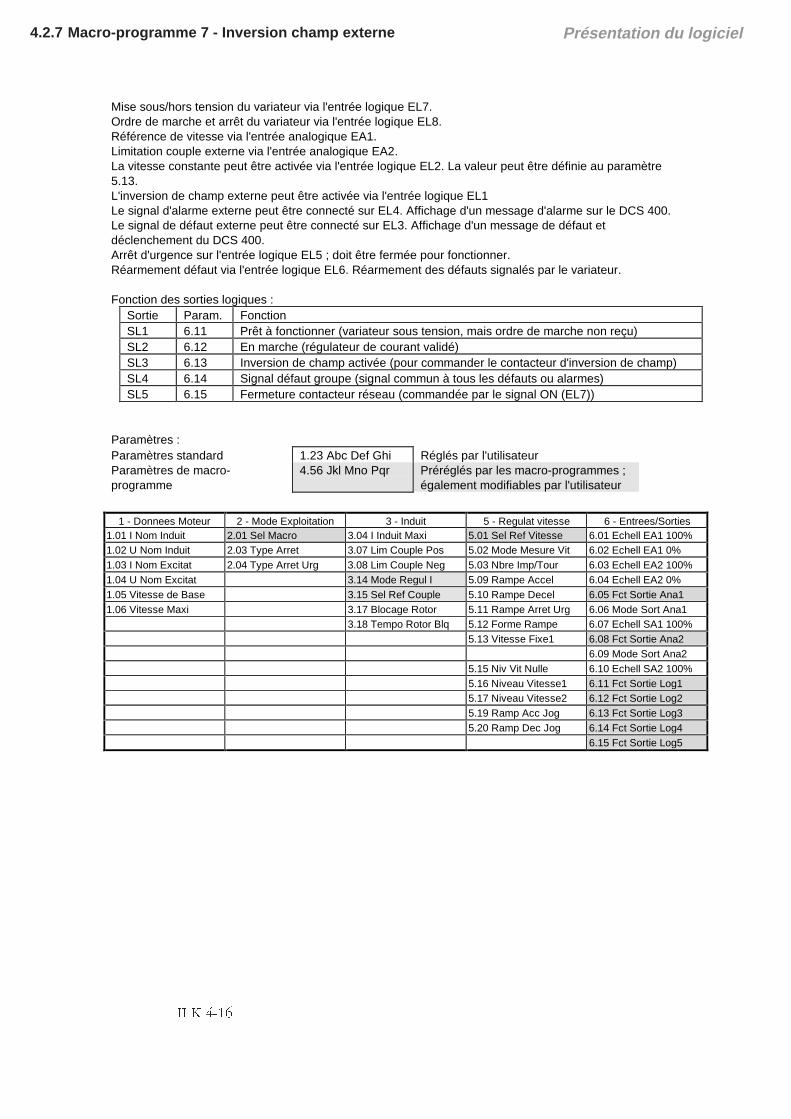
4.2.7 Macro-programme 7 - Inversion champ externe
II K 4-16
Mise sous/hors tension du variateur via l'entrée logique EL7.Ordre de marche et arrêt du variateur via l'entrée logique EL8.Référence de vitesse via l'entrée analogique EA1.Limitation couple externe via l'entrée analogique EA2.La vitesse constante peut être activée via l'entrée logique EL2. La valeur peut être définie au paramètre5.13.L'inversion de champ externe peut être activée via l'entrée logique EL1Le signal d'alarme externe peut être connecté sur EL4. Affichage d'un message d'alarme sur le DCS 400.Le signal de défaut externe peut être connecté sur EL3. Affichage d'un message de défaut etdéclenchement du DCS 400.Arrêt d'urgence sur l'entrée logique EL5 ; doit être fermée pour fonctionner.Réarmement défaut via l'entrée logique EL6. Réarmement des défauts signalés par le variateur.
Fonction des sorties logiques :Sortie Param. FonctionSL1 6.11 Prêt à fonctionner (variateur sous tension, mais ordre de marche non reçu)SL2 6.12 En marche (régulateur de courant validé)SL3 6.13 Inversion de champ activée (pour commander le contacteur d'inversion de champ)SL4 6.14 Signal défaut groupe (signal commun à tous les défauts ou alarmes)SL5 6.15 Fermeture contacteur réseau (commandée par le signal ON (EL7))
Paramètres :Paramètres standard 1.23 Abc Def Ghi Réglés par l'utilisateurParamètres de macro-programme
4.56 Jkl Mno Pqr Préréglés par les macro-programmes ;également modifiables par l'utilisateur
1 - Donnees Moteur 2 - Mode Exploitation 3 - Induit 5 - Regulat vitesse 6 - Entrees/Sorties1.01 I Nom Induit 2.01 Sel Macro 3.04 I Induit Maxi 5.01 Sel Ref Vitesse 6.01 Echell EA1 100%1.02 U Nom Induit 2.03 Type Arret 3.07 Lim Couple Pos 5.02 Mode Mesure Vit 6.02 Echell EA1 0%1.03 I Nom Excitat 2.04 Type Arret Urg 3.08 Lim Couple Neg 5.03 Nbre Imp/Tour 6.03 Echell EA2 100%1.04 U Nom Excitat 3.14 Mode Regul I 5.09 Rampe Accel 6.04 Echell EA2 0%1.05 Vitesse de Base 3.15 Sel Ref Couple 5.10 Rampe Decel 6.05 Fct Sortie Ana11.06 Vitesse Maxi 3.17 Blocage Rotor 5.11 Rampe Arret Urg 6.06 Mode Sort Ana1
3.18 Tempo Rotor Blq 5.12 Forme Rampe 6.07 Echell SA1 100%5.13 Vitesse Fixe1 6.08 Fct Sortie Ana2
6.09 Mode Sort Ana25.15 Niv Vit Nulle 6.10 Echell SA2 100%5.16 Niveau Vitesse1 6.11 Fct Sortie Log15.17 Niveau Vitesse2 6.12 Fct Sortie Log25.19 Ramp Acc Jog 6.13 Fct Sortie Log35.20 Ramp Dec Jog 6.14 Fct Sortie Log4
6.15 Fct Sortie Log5
Présentation du logiciel
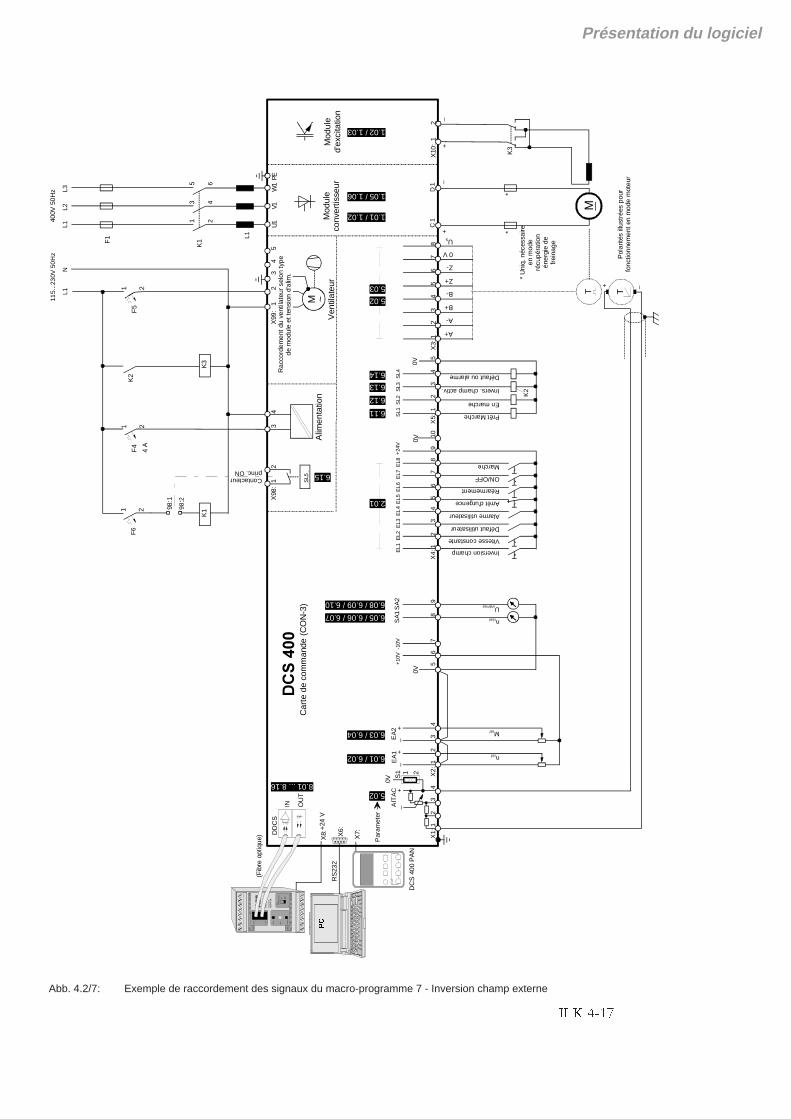
Abb. 4.2/7: Exemple de raccordement des signaux du macro-programme 7 - Inversion champ externe
II K 4-17
Présentation du logiciel
_+
IN OU
T
C 1
D 1
X98
:
DO
5
12
34
45
X99
:1
23
U1W
1V1
PE
X10
:1
2
AIT
AC
AI1
AI2
+10
V-1
0VA
O1
AO
2D
I1D
I2D
I3D
I4D
I5D
I6D
I7D
I8+
24V
DO
1D
O2
DO
3D
O4
__
++
TT
K198
:1
98:2
F6
1 2F
4
1 2F
5
1 2
115.
..23
0V 5
0H
z
L1N
L1L2
L3
400V
50H
z
F1
K1
13
5
24
6
L1
M
0V0V
0V
X1:
12
34
12
34
56
78
9X
4:1
23
45
67
89
10X
5:1
23
45
X3:
X2:
+ _
S1 21
DD
CS
Nxx
x-0
1xx
xxxx
xxA
DA
PT
ER
BU
ST
ER
MIN
AT
ION
ON
OFF
RX
D
TX
D
PE
SH
FD
GD
(N)
D(P
)
X1
X2
PE
SH
FD
GD
(N)
D(P
)S
H
XM
IT
RE
C
ER
RO
R
+24
V0V
SH
3&
X7:X6:
X8:
+24
V
RS
232
4 A
0V
M ~
12
34
56
78
'&6
++
__
5.02
6.01 / 6.02
6.03 / 6.04
6.05 / 6.06 / 6.07
6.08 / 6.09 / 6.10
2.01
6.11
6.12
6.13
6.14
5.02
5.03
1.01 / 1.02
1.05 / 1.06
1.02 / 1.03
8.01 ... 8.16
6.15
Par
amet
er
A+
A-
B+
B-
Z+
Z-
0 V
US
K3
K2
K3
K2
DC
S 4
00 P
AN
**
Car
te d
e co
mm
ande
(C
ON
-3)
Mod
ule
conv
ertis
seur
Mod
ule
d’ex
cita
tion
Pol
arité
s ill
ustr
ées
pour
fonc
tionn
emen
t en
mod
e m
oteu
r
(Fib
re o
ptiq
ue)
Rac
cord
emen
t du
vent
ilate
ur s
elon
type
de m
odul
e et
tens
ion
d'al
im.
Alim
enta
tion
Ven
tilat
eur
nréel
Uindmes
Inversion champ
Vitesse constante
Défaut utilisateur
Arrêt d'urgence
Réarmement
ON/OFF
Marche
Prêt Marche
En marche
Invers. champ activ.
Défaut ou alarme
Contacteurprinc. ON
* U
niq.
néc
essa
ireen
mod
e ré
cupé
ratio
nén
ergi
e de
frei
nage
EA
1E
A2
EL1
EL2
EL3
EL
4E
L5
EL
6E
L7E
L8S
L1S
L2S
L4S
L3S
A1
SA
2
SL5
Alarme utilisateur
nréf
Mréf

4.2.8 Macro-programme 8 - Régulation de couple
II K 4-18
Présentation du logiciel
Mise sous/hors tension du variateur via l'entrée logique EL7.Ordre de marche et arrêt du variateur via l'entrée logique EL8.Référence couple via l'entrée analogique EA1.Inversion du sens de rotation via l'entrée logique EL1.
Le signal d'alarme externe peut être connecté sur EL4. Affichage d'un message d'alarme sur le DCS 400.Le signal de défaut externe peut être connecté sur EL3. Affichage d'un message de défaut etdéclenchement du DCS 400.Arrêt d'urgence sur l'entrée logique EL5 ; doit être fermée pour fonctionner.Réarmement défaut via l'entrée logique EL6. Réarmement des défauts signalés par le variateur.
Fonction des sorties logiques :Sortie Param. FonctionSL1 6.11 Prêt pour la mise sous tension (électronique sous tension, aucun défaut détecté)SL2 6.12 Prêt à fonctionner (variateur sous tension, mais ordre de marche non reçu)SL3 6.13 En marche (régulateur de courant validé)SL4 6.14 Signal défaut groupe (signal commun à tous les défauts ou alarmes)SL5 6.15 Fermeture contacteur réseau (commandée par le signal ON (EL7)
Paramètres :Paramètres standard 1.23 Abc Def Ghi Réglés par l'utilisateurParamètres de macro-programme
4.56 Jkl Mno Pqr Préréglés par les macro-programmes ;également modifiables par l'utilisateur
1 - Donnees Moteur 2 - Mode Exploitation 3 - Induit 5 - Regulat vitesse 6 - Entrees/Sorties1.01 I Nom Induit 2.01 Sel Macro 3.04 I Induit Maxi 5.01 Sel Ref Vitesse 6.01 Echell EA1 100%1.02 U Nom Induit 2.03 Type Arret 3.07 Lim Couple Pos 5.02 Mode Mesure Vit 6.02 Echell EA1 0%1.03 I Nom Excitat 2.04 Type Arret Urg 3.08 Lim Couple Neg 5.03 Nbre Imp/Tour 6.03 Echell EA2 100%1.04 U Nom Excitat 3.14 Mode Regul I 5.11 Rampe Arret Urg 6.04 Echell EA2 0%1.05 Vitesse de Base 3.15 Sel Ref Couple 5.15 Niv Vit Nulle 6.05 Fct Sortie Ana11.06 Vitesse Maxi 3.17 Blocage Rotor 5.16 Niveau Vitesse1 6.06 Mode Sort Ana1
3.18 Tempo Rotor Blq 5.17 Niveau Vitesse2 6.07 Echell SA1 100%6.08 Fct Sortie Ana26.09 Mode Sort Ana26.10 Echell SA2 100%6.11 Fct Sortie Log16.12 Fct Sortie Log26.13 Fct Sortie Log36.14 Fct Sortie Log46.15 Fct Sortie Log5
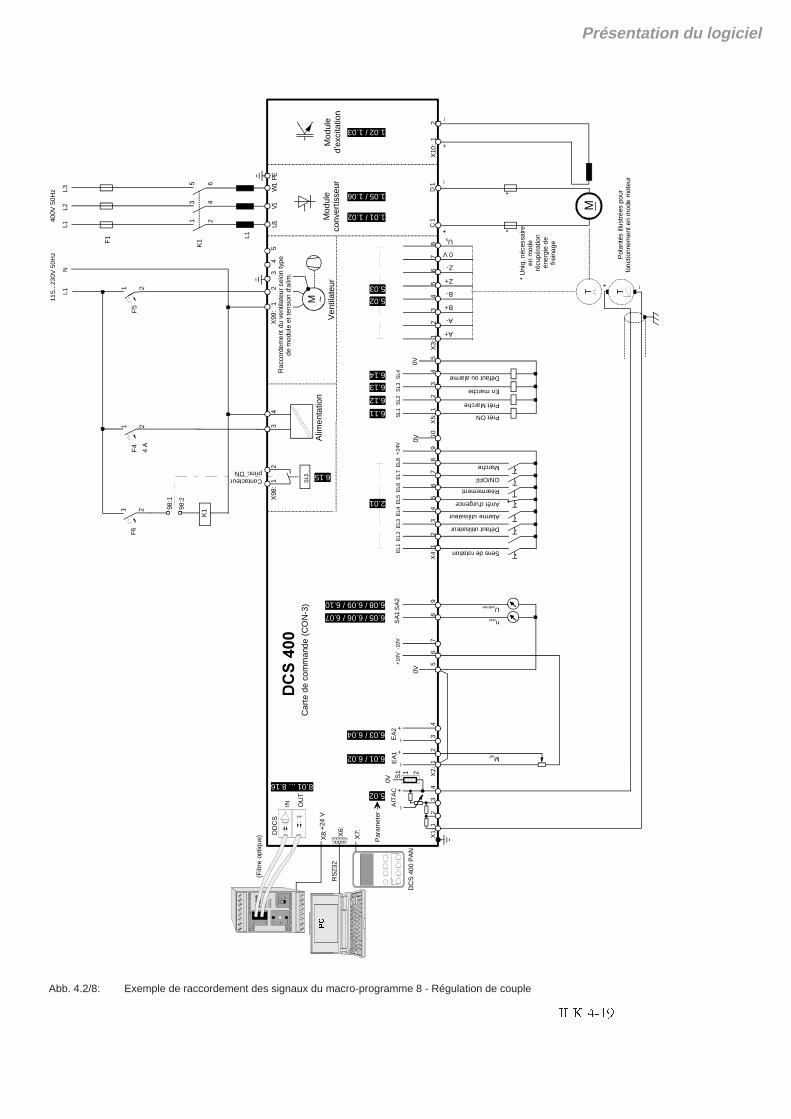
Abb. 4.2/8: Exemple de raccordement des signaux du macro-programme 8 - Régulation de couple
II K 4-19
Présentation du logiciel
IN OU
T
C 1
D 1
X98
:
DO
5
12
34
45
X99
:1
23
U1W
1V1
PE
X10
:1
2
AIT
AC
AI1
AI2
+10
V-1
0VA
O1
AO
2D
I1D
I2D
I3D
I4D
I5D
I6D
I7D
I8+
24V
DO
1D
O2
DO
3D
O4
__
_+
++
TT
K198
:1
98:2
F6
1 2F
4
1 2F
5
1 2
115.
..23
0V 5
0H
z
L1N
L1L2
L3
400V
50H
z
F1
K1
13
5
24
6
L1
M
0V0V
0V
X1:
12
34
12
34
56
78
9X
4:1
23
45
67
89
10X
5:1
23
45
X3:
X2:
+ _
S1 21
DD
CS
Nxx
x-0
1xx
xxxx
xxA
DA
PT
ER
BU
ST
ER
MIN
AT
ION
ON
OFF
RX
D
TX
D
PE
SH
FD
GD
(N)
D(P
)
X1
X2
PE
SH
FD
GD
(N)
D(P
)S
H
XM
IT
RE
C
ER
RO
R
+24
V0V
SH
3&
X7:X6:
X8:
+24
V
RS
232
4 A
0V
M ~
12
34
56
78
'&6
++
__
5.02
6.01 / 6.02
6.03 / 6.04
6.05 / 6.06 / 6.07
6.08 / 6.09 / 6.10
2.01
6.11
6.12
6.13
6.14
5.02
5.03
1.01 / 1.02
1.05 / 1.06
1.02 / 1.03
8.01 ... 8.16
6.15
Par
amet
er
A+
A-
B+
B-
Z+
Z-
0 V
US
DC
S 4
00 P
AN
**
Car
te d
e co
mm
ande
(C
ON
-3)
Mod
ule
conv
ertis
seur
Mod
ule
d’ex
cita
tion
Pol
arité
s ill
ustr
ées
pour
fonc
tionn
emen
t en
mod
e m
oteu
r
(Fib
re o
ptiq
ue)
Rac
cord
emen
t du
vent
ilate
ur s
elon
type
de m
odul
e et
tens
ion
d'al
im.
Alim
enta
tion
Ven
tilat
eur
nréel
Uindmes
Sens de rotation
Défaut utilisateur
Arrêt d'urgence
Réarmement
ON/OFF
Marche
Prêt ON
Prêt Marche
En marche
Défaut ou alarme
Contacteurprinc. ON
* U
niq.
néc
essa
ireen
mod
e ré
cupé
ratio
nén
ergi
e de
frei
nage
EA
1E
A2
EL1
EL
2E
L3E
L4E
L5E
L6E
L7
EL8
SL1
SL2
SL4
SL3
SA
1S
A2
SL5
Alarme utilisateur
Mréf

4.3 Liste complète des paramètres
Paramètres
II K 4-20
1 - Donnees Moteur 2 - Mode Exploitation 3 - Induit 4 - Excitation1.01 I Nom Induit * 2.01 Sel Macro * 3.01 Ref I Induit 4.01 Ref I Excitation1.02 U Nom Induit * 2.02 Choix Commande 3.02 I Induit Mesure 4.02 I Excit Mesure1.03 I Nom Excitat * 2.03 Type Arret * 3.03 U Induit Mesure 4.03 Gain Prop I Exc 1.04 U Nom Excitat * 2.04 Type Arret Urg * 3.04 I Induit Maxi* 4.04 Integr I Excit
1.05 Vitesse de Base * 2.05 Mot Cde Princip 3.05 Tps Surcharge 4.05 Surintens Excit1.06 Vitesse Maxi * 2.06 Mot Etat Princ 3.06 Tps Retablissem 4.06 Sousintens Exc
1.07 Tension Reseau 2.07 Mode Def Comm 3.07 Lim Couple Pos * 4.07 I Excit 40% 1.08 Freq Reseau 2.08 Tempo Def Comm 3.08 Lim Couple Neg * 4.08 I Excit 70%
1.09 Surtension Ind 2.09 Type Demarrage 3.09 Gain Reg I Ind 4.09 I Excit 90% 1.10 Sous-Tens Res 3.10 Integ Reg I Ind 4.10 Ref Chauff Exc1.11 Tempo Def Res 3.11 Lim I Cont Mot 4.11 Gain Prop Fem 1.12 Limit I Vitesse 3.12 Inductance Ind 4.12 Tps Integ Fem
3.13 Resistance Ind
3.14 Mode Regul I3.15 Sel Ref Couple3.16 Ondulat Ref I3.17 Blocage Rotor *3.18 Tempo Rotor Blq *3.19 Angle Allumage3.20 Fem Reelle3.21 Puissance Reel3.22 Couple Fixe3.23 Couple Reel
5 - Regulat Vitesse 6 - Entrees/Sorties 7 - Maintenance 8 - Comm Serie5.01 Sel Ref Vitesse 6.01 Echell EA1 100% 7.01 Langue * 8.01 Par1 Comm Serie5.02 Mode Mesure Vit * 6.02 Echell EA1 0% 7.02 Execut Fct 8.02 Par2 Comm Serie5.03 Nbre Imp/Tour * 6.03 Echell EA2 100% 7.03 Diagnostic 8.03 Par3 Comm Serie5.04 Ref Vitesse 6.04 Echell EA2 0% 7.04 Version Program 8.04 Par4 Comm Serie
5.05 Vitesse Reelle 6.05 Fct Sortie Ana1 * 7.05 Type Variateur 8.05 Par5 Comm Serie5.06 Vitesse Tachy 6.06 Mode Sort Ana1 * 7.06 I Nom Variateur 8.06 Par6 Comm Serie5.07 Gain Regul Vit 6.07 Echell SA1 100% * 7.07 U Nom Variateur 8.07 Par7 Comm Serie5.08 Integ Regul Vit 6.08 Fct Sortie Ana2 * 7.08 Derniere Alarme 8.08 Par8 Comm Serie
5.09 Rampe Accel * 6.09 Mode Sort Ana2 * 7.09 Mot Defaut 1 8.09 Par9 Comm Serie5.10 Rampe Decel * 6.10 Echell SA2 100% * 7.10 Mot Defaut 2 8.10 Par10 Com Serie5.11 Rampe Arret Urg * 6.11 Fct Sortie Log1 * 7.11 Mot Defaut 3 8.11 Par11 Com Serie
5.12 Forme Rampe 6.12 Fct Sortie Log2 * 7.12 Mot Alarme 1 8.12 Par12 Com Serie5.13 Vitesse Fixe1 6.13 Fct Sortie Log3 * 7.13 Mot Alarme 2 8.13 Par13 Com Serie5.14 Vitesse Fixe2 6.14 Fct Sortie Log4 * 7.14 Mot Alarme 3 8.14 Par14 Com Serie5.15 Niv Vit Nulle * 6.15 Fct Sortie Log5 * 7.15 Ref1 Config 8.15 Par15 Com Serie5.16 Niveau Vitesse1 * 6.16 Val1 Afficheur 7.16 Ref2 Config 8.16 Par16 Com Serie5.17 Niveau Vitesse2 * 6.17 Val2 Afficheur 7.17 Per Sign Carres5.18 Val Survitesse 6.18 Val3 Afficheur 7.18 Val Sign Carres5.19 Ramp Acc Jog 6.19 Val4 Afficheur5.20 Ramp Dec Jog 6.20 Val Dataset 2.25.21 Sel Param2 6.21 Val Dataset 2.35.22 Gain Reg Param2 6.22 Fct Bit11 Mep5.23 Int Reg Param2 6.23 Fct Bit12 Mep5.24 Rpe Acc Param2 6.24 Fct Bit13 Mep5.25 Rpe Dec Param2 6.25 Fct Bit14 Mep5.26 Sel Ref Vt Aux 6.26 AI1 Act5.27 Statisme 6.27 AI2 Act5.28 Ref Filt Time 6.28 DI Act5.29 Act Filt 1 Time5.30 Act Filt 2 Time
StyleStandard Paramètres accessibles en permanenceGrisé Signaux (valeurs réelles) et paramètres occultésGras Signaux (valeurs réelles)Souligné Paramètres dont la valeur est fonction de l'auto-calibrage des régulateurs* Paramètres dont la valeur est réglée par l'assistant de configuration (Micro-console et PC)
Présentation du logiciel

II K 4-21
N° par. Nom des paramètres et fonction Mini Maxi Prérég. FormatGrpe 1 Données moteur
1.01Assist.
I Nom InduitCourant nominal moteur en ampères(figure sur la plaque signalétique du moteur).
4 820 4 A
1.02Assist.
U Nom InduitTension nominale moteur en volts(figure sur la plaque signalétique du moteur).
0 700 0 V
1.03Assist.
I Nom ExcitatCourant nominal d'excitation en ampères(figure sur la plaque signalétique du moteur).
0.10 16.00 0.40 A
1.04Assist.
U Nom ExcitatTension nominale d'excitation en volts(figure sur la plaque signalétique du moteur).
50 350 310 V
1.05Assist.
Vitesse de BaseVitesse nominale moteur en tours/minute(figure sur la plaque signalétique du moteur).
100 6500 100 tr/min
1.06Assist.
Vitesse MaxiVitesse maximale moteur en tours/minute(figure sur la plaque signalétique du moteur).
100 6500 100 tr/min
1.07Signal
Tension ReseauTension réseau mesurée en volts.
- - - V
1.08Signal
Freq ReseauFréquence réseau mesurée en hertz.
- - - Hz
Menu complet des paramètres1.09 Surtension Ind
Seuil de déclenchement en surtension du moteur en% de la tension nominale moteur (1.02)
20 150 110 %
1.10 Sous-Tens ResEn fonction de la tension nominal moteur (1.02), estcalculée la tension nécessaire reseau.De ce paramètre est déterminé une marge desécurité complémentaire sur la tension minimale.
0 50 5 %
1.11 Tempo Def ResDurant ce temps, la tension réseau doit repasser àune valeur supérieure à "Sous.Tens Res" (1.10).Sinon un défaut soustension sera affiché.
0.0 10.0 0.0 s
1.12 Limit I VitesseLimitation de courant en fonction de la vitesse. Apartir de cette valeur de vitesse, le courant d'induitsera réduit proportionnellement à 1/n.
100 6500 6500 tr/min
Présentation du logiciel
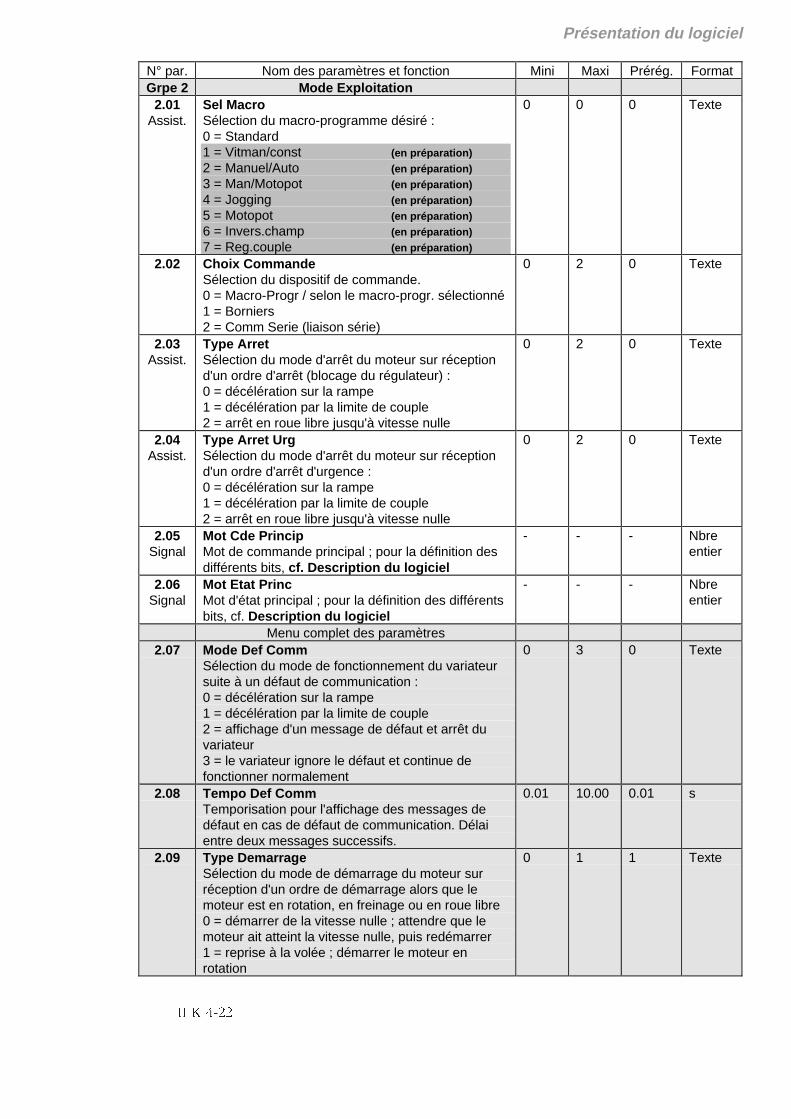
II K 4-22
N° par. Nom des paramètres et fonction Mini Maxi Prérég. FormatGrpe 2 Mode Exploitation
2.01Assist.
Sel MacroSélection du macro-programme désiré :0 = Standard1 = Vitman/const (en préparation)2 = Manuel/Auto (en préparation)3 = Man/Motopot (en préparation)4 = Jogging (en préparation)5 = Motopot (en préparation)6 = Invers.champ (en préparation)7 = Reg.couple (en préparation)
0 0 0 Texte
2.02 Choix CommandeSélection du dispositif de commande.0 = Macro-Progr / selon le macro-progr. sélectionné1 = Borniers2 = Comm Serie (liaison série)
0 2 0 Texte
2.03Assist.
Type ArretSélection du mode d'arrêt du moteur sur réceptiond'un ordre d'arrêt (blocage du régulateur) :0 = décélération sur la rampe1 = décélération par la limite de couple2 = arrêt en roue libre jusqu'à vitesse nulle
0 2 0 Texte
2.04Assist.
Type Arret UrgSélection du mode d'arrêt du moteur sur réceptiond'un ordre d'arrêt d'urgence :0 = décélération sur la rampe1 = décélération par la limite de couple2 = arrêt en roue libre jusqu'à vitesse nulle
0 2 0 Texte
2.05Signal
Mot Cde PrincipMot de commande principal ; pour la définition desdifférents bits, cf. Description du logiciel
- - - Nbreentier
2.06Signal
Mot Etat PrincMot d'état principal ; pour la définition des différentsbits, cf. Description du logiciel
- - - Nbreentier
Menu complet des paramètres2.07 Mode Def Comm
Sélection du mode de fonctionnement du variateursuite à un défaut de communication :0 = décélération sur la rampe1 = décélération par la limite de couple2 = affichage d'un message de défaut et arrêt duvariateur3 = le variateur ignore le défaut et continue defonctionner normalement
0 3 0 Texte
2.08 Tempo Def CommTemporisation pour l'affichage des messages dedéfaut en cas de défaut de communication. Délaientre deux messages successifs.
0.01 10.00 0.01 s
2.09 Type DemarrageSélection du mode de démarrage du moteur surréception d'un ordre de démarrage alors que lemoteur est en rotation, en freinage ou en roue libre0 = démarrer de la vitesse nulle ; attendre que lemoteur ait atteint la vitesse nulle, puis redémarrer1 = reprise à la volée ; démarrer le moteur enrotation
0 1 1 Texte
Présentation du logiciel

II K 4-23
N° par. Nom des paramètres et fonction Mini Maxi Prérég. FormatGrpe 3 Induit
3.01Signal
Ref I InduitRéférence de courant d'induit en ampères.
- - - A
3.02Signal
I Induit MesureCourant d'induit mesuré en ampères.
- - - A
3.03Signal
U Induit MesureTension d'induit mesurée en volts.
- - - V
3.04Assist.
I Induit MaxCourant de surcharge. Courant d'induit maxiautorisé en % du courant nominal moteur (1.01).
0 400 100 %
3.05 Tps SurchargeTemps surcharge. Temps maxi autorisé pour lecourant d'induit (3.04).
0 180 0 s
3.06 Tps RetablissemTemps de rétablissement au cours duquel uncourant réduit doit circuler.
0 3600 0 s
3.07Assist.
Lim Couple PosCouple de surcharge positif. Couple positif maxiautorisé en % du couple nominal. (Le couplenominal est le couple développé au courant nominald'excitation et au courant nominal d'induit)
0 400 100 %
3.08Assist.
Lim Couple NegCouple de surcharge négatif. Couple négatif maxiautorisé en % du couple nominal. (Le couplenominal est le couple développé au courant nominald'excitation et au courant nominal d'induit)
-400 0 -100(4 q)
0(2 q)
%
3.09 auto-calibr.
Gain Reg I IndGain proportionnel du régulateur de courant d'induit(Régulateur PI).
0.000 10.000 0.100 Nbreentier
3.10 auto-calibr.
Integ Reg I IndConstante de temps d'intégration du régulateur decourant d'induit (Régulateur PI) en millisecondes.
0.0 1000.0 50.0 ms
3.11 auto-calibr.
Lim I Cont MotValeur du courant d'induit à la limite entre le couranten régime intermittent et régime continu en % ducourant nominal moteur (1.01)
0 100 50 %
3.12 auto-calibr.
Inductance IndInductance du circuit d'induit en millihenry.
0 655.35 0 mH
3.13 auto-calibr.
Resistance IndRésistance du circuit d'induit en milliohms.
0 65535 0 mOhm
Menu complet des paramètres3.14 Mode Regul I
Sélection du mode de commande désiré :0 = Macro-Progr / selon le macro-progr. sélectionné1 = Reg Vitesse / régulation de vitesse2 = Reg Couple / régulation de couple3 = Reg Courant / régulation de courant4 = Vit+Couple / régulation de vitesse et de couple5 = Reg Vit Lim / rég. vitesse avec limit. couple ext.6 = Reg Cple Lim / rég. couple avec limit. vitesse
0 6 0 Texte
Présentation du logiciel

II K 4-24
N° par. Nom du paramètre et fonction Mini Maxi Prérég. FormatGrpe 3 Induit (suite)
3.15 Sel Ref CoupleSélection de l'origine de la référence de couple :0 = Macro-Progr / selon le macro-prog. sélectionné1 = Ent Analog1 / entrée analogique 1 (X2:1-2)2 = Ent Analog2 / entrée analogique 2 (X2:3-4)3 = Ref Pr Comm / référence princ. sur liaison série4 = Ref Aux Comm / référence aux. sur liaison série5 = Couple fixe / valeur de couple fixe (3.22)6 = Ref1 Config / référence 1 configurée7 = Ref2 Config / référence 2 configurée8 = Sign Carres / générateur de signaux carrés9 = Vit 0 Const / vitesse nulle constante
0 9 0 Texte
3.16 Ondulat Ref IOndulation maxi autorisée de la référence decourant d'induit (di/dt) en % par milliseconde ducourant nominal moteur (1.01).
0.1 30.0 10.0 % / ms
3.17Assist.
Blocage RotorProtection contre le blocage moteur.Seuil de déclenchement de la protection contre leblocage moteur en % du couple nominal à moteurbloqué.(Le couple nominal est le couple développé aucourant nominal d'excitation et au courant nominald'induit)
0 400 100 %
3.18Assist.
Tempo Rotor BlqProtection contre le blocage du moteur.Délai en secondes, pendant lequel le seuil dedéclenchement de la protection contre le blocagemoteur à moteur bloqué doit être dépassé.
0.0 60.0 0.0 s
3.19Signal
Angle AllumageAngle d'allumage réel en degré
- - - °
3.20Signal
FEM reelleForce contre-électromotrice (f.e.m.) réelle du moteuren volts.
- - - V
3.21Signal
Puissance ReelPuissance utile réelle en kilowatts. (temps derefraichissement: 20 ms)
- - - kW
3.22 Couple FixeCouple fixe préréglé.Couple fixe en % du couple nominal.(Le couple nominal est le couple développé aucourant nominal d'excitation et au courant nominald'induit)
-100 100 0 %
3.23Signal
Couple ReelCouple réel en % du couple nominal.(Le couple nominal est le couple développé aucourant nominal d'excitation et au courant nominald'induit)
- - - %
Présentation du logiciel
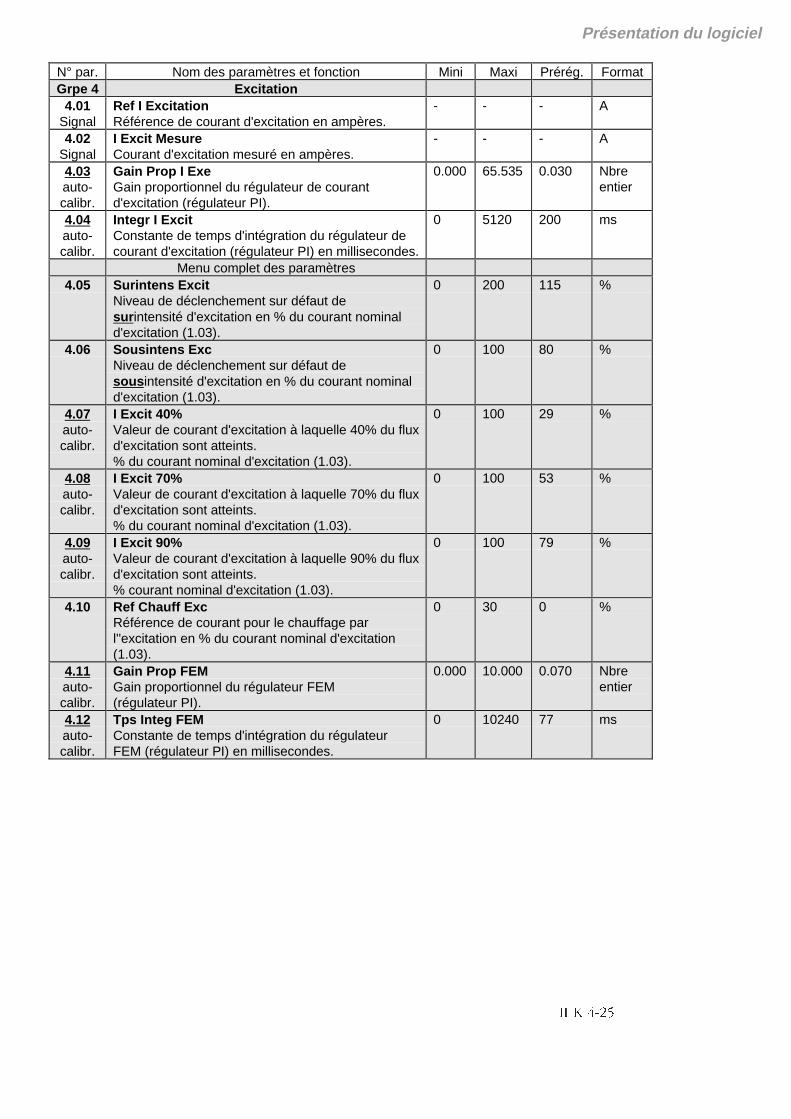
II K 4-25
N° par. Nom des paramètres et fonction Mini Maxi Prérég. FormatGrpe 4 Excitation
4.01Signal
Ref I ExcitationRéférence de courant d'excitation en ampères.
- - - A
4.02Signal
I Excit MesureCourant d'excitation mesuré en ampères.
- - - A
4.03 auto-calibr.
Gain Prop I ExeGain proportionnel du régulateur de courantd'excitation (régulateur PI).
0.000 65.535 0.030 Nbreentier
4.04 auto-calibr.
Integr I ExcitConstante de temps d'intégration du régulateur decourant d'excitation (régulateur PI) en millisecondes.
0 5120 200 ms
Menu complet des paramètres4.05 Surintens Excit
Niveau de déclenchement sur défaut desurintensité d'excitation en % du courant nominal d'excitation (1.03).
0 200 115 %
4.06 Sousintens ExcNiveau de déclenchement sur défaut desousintensité d'excitation en % du courant nominal d'excitation (1.03).
0 100 80 %
4.07 auto-calibr.
I Excit 40%Valeur de courant d'excitation à laquelle 40% du fluxd'excitation sont atteints.% du courant nominal d'excitation (1.03).
0 100 29 %
4.08 auto-calibr.
I Excit 70%Valeur de courant d'excitation à laquelle 70% du fluxd'excitation sont atteints.% du courant nominal d'excitation (1.03).
0 100 53 %
4.09 auto-calibr.
I Excit 90%Valeur de courant d'excitation à laquelle 90% du fluxd'excitation sont atteints.% courant nominal d'excitation (1.03).
0 100 79 %
4.10 Ref Chauff ExcRéférence de courant pour le chauffage parl''excitation en % du courant nominal d'excitation(1.03).
0 30 0 %
4.11 auto-calibr.
Gain Prop FEMGain proportionnel du régulateur FEM(régulateur PI).
0.000 10.000 0.070 Nbreentier
4.12 auto-calibr.
Tps Integ FEMConstante de temps d'intégration du régulateurFEM (régulateur PI) en millisecondes.
0 10240 77 ms
Présentation du logiciel

II K 4-26
N° par. Nom des paramètres et fonction Mini Maxi Prérég. FormatGrpe 5 Régulat Vitesse
5.01 Sel Ref VitesseSélection de l'origine de la référence de vitesse:0 = Macro-Progr / selon le macro-prog. sélectionné1 = Ent Analog1 / entrée analogique 1 (X2:1-2)2 = Ent Analog2 / entrée analogique 2 (X2:3-4)3 = Ref Pr Comm / référence princ. sur liaison série4 = Ref Aux Comm / référence aux. sur liaison série5 = Vitesse Fix1 / vitesse fixe1 (5.13)6 = Vitesse Fix2 / vitesse fixe 2 (5.14)7 = Ref1 Config / référence 1 configurée8 = Ref2 Config / référence 2 configurée9 = Sign Carres / générateur de signaux carrés10 = Vit 0 Const / vitesse nulle constante
0 10 0 Texte
5.02Assist.
Mode Mesure VitSélection de la mesure de vitesse :0 = FEM (pas de mesure de vitesse)1 = dynamo tachymétrique2 = codeur
0 2 0 Texte
5.03Assist.
Nbre Imp/TourNombre d'impulsions/tour du codeur.
20 10000 1024 Nbreentier
5.04Signal
Ref VitesseRéférence vitesse en nombre de tours/minute.
- - - tr/min
5.05Signal
Vitesse ReelleValeur de vitesse réelle utilisée par le régulateur devitesse, en nombre de tours/minute.
- - - tr/min
5.06Signal
Vitesse TachyRetour vitesse de la dynamo tachymétrique (valeuranalogique), en nombre de tours/minute.
- - - tr/min
5.07 auto-calibr.
Gain Regul VitGain proportionnel du régulateur de vitesse(régulateur PI).
0.000 10.000 1.000 Nbreentier
5.08 auto-calibr.
Integ Regul VitConstante de temps d'intégration du régulateur devitesse (régulateur PI) en millisecondes.
0.0 6553,5 5000.0 ms
5.09Assist.
Rampe AccelTemps de rampe d'accélération en secondes pourpasser de la vitesse nulle à la vitesse maxi (1.06).
0.0 3000.0 10.0 s
5.10Assist.
Rampe DecelTemps de rampe de décélération en secondes pourpasser de la vitesse maxi à la vitesse nulle (1.06).
0.0 3000.0 10.0 s
5.11Assist.
Rampe Arret UrgTemps de rampe de décélération en secondes pourpasser de la vitesse maxi à la vitesse nulle (1.06) suiteà un déclenchement sur arrêt d'urgence.
0.0 3000.0 10.0 s
Menu complet des paramètres5.12 Forme Rampe
Sélection de la forme des rampes :0 = linéaire1 = rampe en S
0 1 0 Texte
5.13 Vitesse Fixe1Vitesse fixe 1 en nombre de tours/minute.
-6500 6500 0 tr/min
5.14 Vitesse Fixe2Vitesse fixe 2 en nombre de tours/minute.
-6500 6500 0 tr/min
Présentation du logiciel

II K 4-27
N° par. Nom des paramètres et fonction Mini Maxi Prérég. FormatGrpe 5 Régulat Vitesse (suite)
5.15Assist.
Niv Vit NulleSignal de vitesse nulle. Vitesse au-dessous delaquelle un signal indique que le moteur est àvitesse nulle.
0 100 30 tr/min
5.16Assist.
Niveau Vitesse1Limite de vitesse pour le signal "Vitesse 1 atteinte".
0 6500 0 tr/min
5.17Assist.
Niveau Vitesse2Limite de vitesse pour le signal "Vitesse 2 atteinte".
0 6500 0 tr/min
5.18 Val SurvitesseValeur de déclenchement sur défaut de survitesse.
100 115 115 %
5.19 Ramp Acc JogTemps de rampe d'accélération en mode Joggingpour passer de la vitesse nulle à la vitesse maxi(1.06).
0.0 3000.0 10.0 s
5.20 Ramp Dec JogTemps de rampe de décélération en mode Joggingpour passer de la vitesse maxi (1.06) à la vitessenulle.
0.0 3000.0 10.0 s
5.21 Sel Param2Sélection du deuxième jeu de paramètres :0 = Non, le jeu de paramètres standard est toujourssélectionné1 = Oui, le deuxième jeu de paramètres est toujourssélectionné2 = Macro-Progr/ selon le macro-prog. sélectionné3 = Vit < Niv1 /Vitesse réelle < Niv. vitesse 1 (5.16)4 = Vit < Niv2 /Vitesse réelle < Niv. vitesse 2 (5.17)5 = Err Vit<Niv1 /Erreur de vitesse < Niv. vitesse 1(5.16)6 = Err Vit<Niv2 /Erreur de vitesse < Niv. vitesse 2(5.17)Pour les choix 2 à 6, le deuxième jeu de paramètresest sélectionné en fonction de l'événement défini.
0 6 0 Texte
5.22 Gain Reg Param2Gain proportionnel du régulateur de vitesse(régulateur PI) pour le deuxième jeu de paramètres.
0.000 10.000 1.000 Nbreentier
5.23 Int Reg Param2Constante de temps d'intégration du régulateur devitesse (régulateur PI) en millisecondes pour ledeuxième jeu de paramètres.
0.0 6553.5 5000.0 ms
5.24 Rpe Acc Param2Temps de rampe d'accélération pour passer de lavitesse nulle à la vitesse maxi (1.06) en secondespour le deuxième jeu de paramètres.
0.0 3000.0 10.0 s
5.25 Rpe Dec Param2Temps de rampe de décélération pour passer de lavitesse maxi (1.06) à la vitesse nulle en secondespour le deuxième jeu de paramètres.
0.0 3000.0 10.0 s
Présentation du logiciel

II K 4-28
N° par. Nom des paramètres et fonction Mini Maxi Prérég. FormatGrpe 5 Régulat Vitesse (suite)
5.26 Sel Ref Vt AuxSélection de l'origine de la référence de vitesseauxiliaire:0 = Macro-Progr / selon le macro-prog. sélectionné1 = Ent Analog1 / entrée analogique 1 (X2:1-2)2 = Ent Analog2 / entrée analogique 2 (X2:3-4)3 = Ref Pr Comm / référence princ. sur liaison série4 = Ref Aux Comm / référence aux. sur liaison série5 = Vitesse Fix1 / vitesse fixe1 (5.13)6 = Vitesse Fix2 / vitesse fixe 2 (5.14)7 = Ref1 Config / référence 1 configurée8 = Ref2 Config / référence 2 configurée9 = Sign Carres / générateur de signaux carrés10 = Vit 0 Const / vitesse nulle constante
0 10 0 Texte
5.27 StatismeRéduction programmée de la vitesse au couplenominal en % de la vitesse maxi (1.06).
0 10 0 %
5.28 Temps Filt RefTemps de filtrage sur la référence vitesse à l'entréedu régulateur de vitesse.
0.00 10.00 0.00 s
5.29 Temps Filt 1Constante de temps 1 du filtre sur l'écart de vitesseà l'entrée du régulateur de vitesse.
0.00 10.00 0.00 s
5.30 Temps Filt 2Constante de temps 2 du filtre sur l'écart de vitesseà l'entrée du régulateur de vitesse.
0.00 10.00 0.00 s
Présentation du logiciel
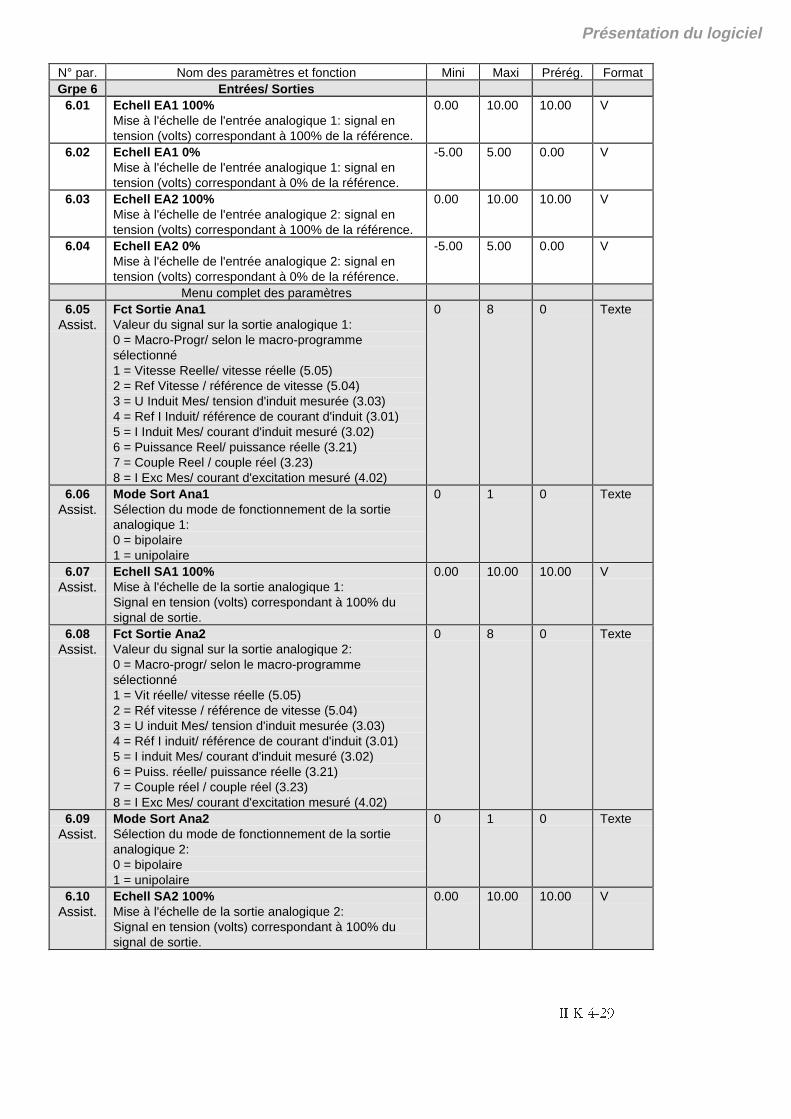
II K 4-29
N° par. Nom des paramètres et fonction Mini Maxi Prérég. FormatGrpe 6 Entrées/ Sorties
6.01 Echell EA1 100%Mise à l'échelle de l'entrée analogique 1: signal entension (volts) correspondant à 100% de la référence.
0.00 10.00 10.00 V
6.02 Echell EA1 0%Mise à l'échelle de l'entrée analogique 1: signal entension (volts) correspondant à 0% de la référence.
-5.00 5.00 0.00 V
6.03 Echell EA2 100%Mise à l'échelle de l'entrée analogique 2: signal entension (volts) correspondant à 100% de la référence.
0.00 10.00 10.00 V
6.04 Echell EA2 0%Mise à l'échelle de l'entrée analogique 2: signal entension (volts) correspondant à 0% de la référence.
-5.00 5.00 0.00 V
Menu complet des paramètres6.05
Assist.Fct Sortie Ana1Valeur du signal sur la sortie analogique 1:0 = Macro-Progr/ selon le macro-programmesélectionné1 = Vitesse Reelle/ vitesse réelle (5.05)2 = Ref Vitesse / référence de vitesse (5.04)3 = U Induit Mes/ tension d'induit mesurée (3.03)4 = Ref I Induit/ référence de courant d'induit (3.01)5 = I Induit Mes/ courant d'induit mesuré (3.02)6 = Puissance Reel/ puissance réelle (3.21)7 = Couple Reel / couple réel (3.23)8 = I Exc Mes/ courant d'excitation mesuré (4.02)
0 8 0 Texte
6.06Assist.
Mode Sort Ana1Sélection du mode de fonctionnement de la sortieanalogique 1:0 = bipolaire1 = unipolaire
0 1 0 Texte
6.07Assist.
Echell SA1 100%Mise à l'échelle de la sortie analogique 1:Signal en tension (volts) correspondant à 100% dusignal de sortie.
0.00 10.00 10.00 V
6.08Assist.
Fct Sortie Ana2Valeur du signal sur la sortie analogique 2:0 = Macro-progr/ selon le macro-programmesélectionné1 = Vit réelle/ vitesse réelle (5.05)2 = Réf vitesse / référence de vitesse (5.04)3 = U induit Mes/ tension d'induit mesurée (3.03)4 = Réf I induit/ référence de courant d'induit (3.01)5 = I induit Mes/ courant d'induit mesuré (3.02)6 = Puiss. réelle/ puissance réelle (3.21)7 = Couple réel / couple réel (3.23)8 = I Exc Mes/ courant d'excitation mesuré (4.02)
0 8 0 Texte
6.09Assist.
Mode Sort Ana2Sélection du mode de fonctionnement de la sortieanalogique 2:0 = bipolaire1 = unipolaire
0 1 0 Texte
6.10Assist.
Echell SA2 100%Mise à l'échelle de la sortie analogique 2:Signal en tension (volts) correspondant à 100% dusignal de sortie.
0.00 10.00 10.00 V
Présentation du logiciel
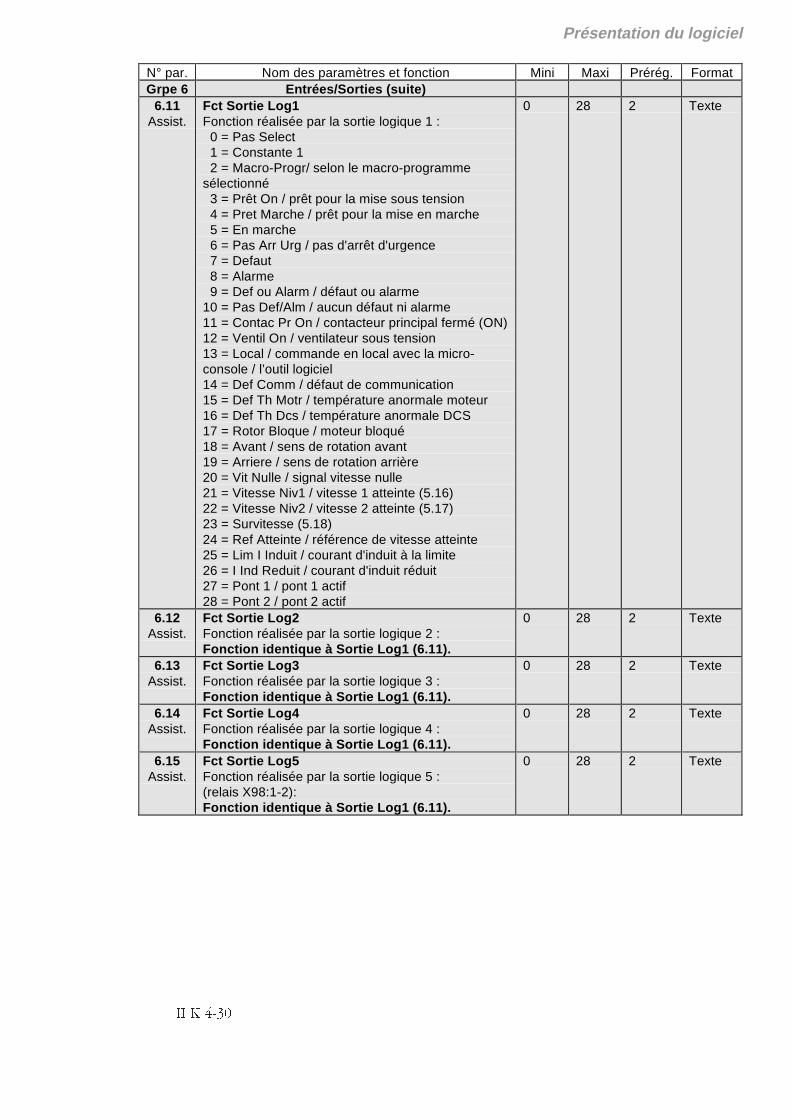
II K 4-30
N° par. Nom des paramètres et fonction Mini Maxi Prérég. FormatGrpe 6 Entrées/Sorties (suite)
6.11Assist.
Fct Sortie Log1Fonction réalisée par la sortie logique 1 : 0 = Pas Select 1 = Constante 1 2 = Macro-Progr/ selon le macro-programmesélectionné 3 = Prêt On / prêt pour la mise sous tension 4 = Pret Marche / prêt pour la mise en marche 5 = En marche 6 = Pas Arr Urg / pas d'arrêt d'urgence 7 = Defaut 8 = Alarme 9 = Def ou Alarm / défaut ou alarme10 = Pas Def/Alm / aucun défaut ni alarme11 = Contac Pr On / contacteur principal fermé (ON)12 = Ventil On / ventilateur sous tension13 = Local / commande en local avec la micro-console / l’outil logiciel14 = Def Comm / défaut de communication15 = Def Th Motr / température anormale moteur16 = Def Th Dcs / température anormale DCS17 = Rotor Bloque / moteur bloqué18 = Avant / sens de rotation avant19 = Arriere / sens de rotation arrière20 = Vit Nulle / signal vitesse nulle21 = Vitesse Niv1 / vitesse 1 atteinte (5.16)22 = Vitesse Niv2 / vitesse 2 atteinte (5.17)23 = Survitesse (5.18)24 = Ref Atteinte / référence de vitesse atteinte25 = Lim I Induit / courant d'induit à la limite26 = I Ind Reduit / courant d'induit réduit27 = Pont 1 / pont 1 actif28 = Pont 2 / pont 2 actif
0 28 2 Texte
6.12Assist.
Fct Sortie Log2Fonction réalisée par la sortie logique 2 :Fonction identique à Sortie Log1 (6.11).
0 28 2 Texte
6.13Assist.
Fct Sortie Log3Fonction réalisée par la sortie logique 3 :Fonction identique à Sortie Log1 (6.11).
0 28 2 Texte
6.14Assist.
Fct Sortie Log4Fonction réalisée par la sortie logique 4 :Fonction identique à Sortie Log1 (6.11).
0 28 2 Texte
6.15Assist.
Fct Sortie Log5Fonction réalisée par la sortie logique 5 :(relais X98:1-2):Fonction identique à Sortie Log1 (6.11).
0 28 2 Texte
Présentation du logiciel

II K 4-31
N° par. Nom des paramètres et fonction Mini Maxi Prérég. FormatGrpe 6 Entrées/Sorties (suite)
6.16 Val1 AfficheurSélection de la valeur réelle 1 affichée sur la micro-console :(valeur à gauche de la 1ère ligne de l'afficheur)0 = Vit Reelle / vitesse réelle (5.05)1 = Ref Vitesse / référence de vitesse (5.04)2 = U Induit Mes / tension d'induit mesurée (3.03)3 = Ref I Induit / référence de courant d'induit (3.01)4 = I Induit Mes / courant d'induit mesuré (3.02)5 = Puiss Reelle / puissance réelle (3.21)6 = Couple Reel / couple réel7 = I Exc Mes/ courant d'excitation mesuré (4.02)
0 7 2 Texte
6.17 Val2 AfficheurSélection de la valeur réelle 2 affichée sur la micro-console :(valeur au centre de la 1ère ligne de l'afficheur)Choix identiques à Val1 Afficheur (616)
0 7 4 Texte
6.18 Val3 AfficheurSélection de la valeur réelle 3 affichée sur la micro-console :(valeur à droite de la 1ère ligne de l'afficheur)Choix identiques à Val1 Afficheur (616)
0 7 1 Texte
6.19 Val4 AfficheurSélection de la valeur réelle 4 affichée sur la micro-console :(valeur au centre de la 2ème ligne de l'afficheur)Choix identiques à Val1 Afficheur (616)
0 7 0 Texte
6.20 Val Dataset 2.2Sélection de la valeur de la trame de données(Dataset) 2.2 transmise sur le réseau de terrain :0 = Vit Reelle / vitesse réelle (5.05)1 = Ref Vitesse / référence de vitesse (5.04)2 = U Induit Mes / tension d'induit mesurée (3.03)3 = Ref I Induit / référence de courant d'induit (3.01)4 = I Induit Mes / courant d'induit mesuré (3.02)5 = Puiss Reelle / puissance réelle (3.21)6 = Couple Reel / couple réel7 = I Exc Mes / courant d'excitation mesuré (4.02)
0 7 0 Texte
6.21 Val Dataset 2.3Sélection de la valeur de la trame de données(Dataset) 2.3 transmise sur le réseau de terrain :Choix identiques à Val Dataset 2.2 (620)
0 7 2 Texte
Présentation du logiciel
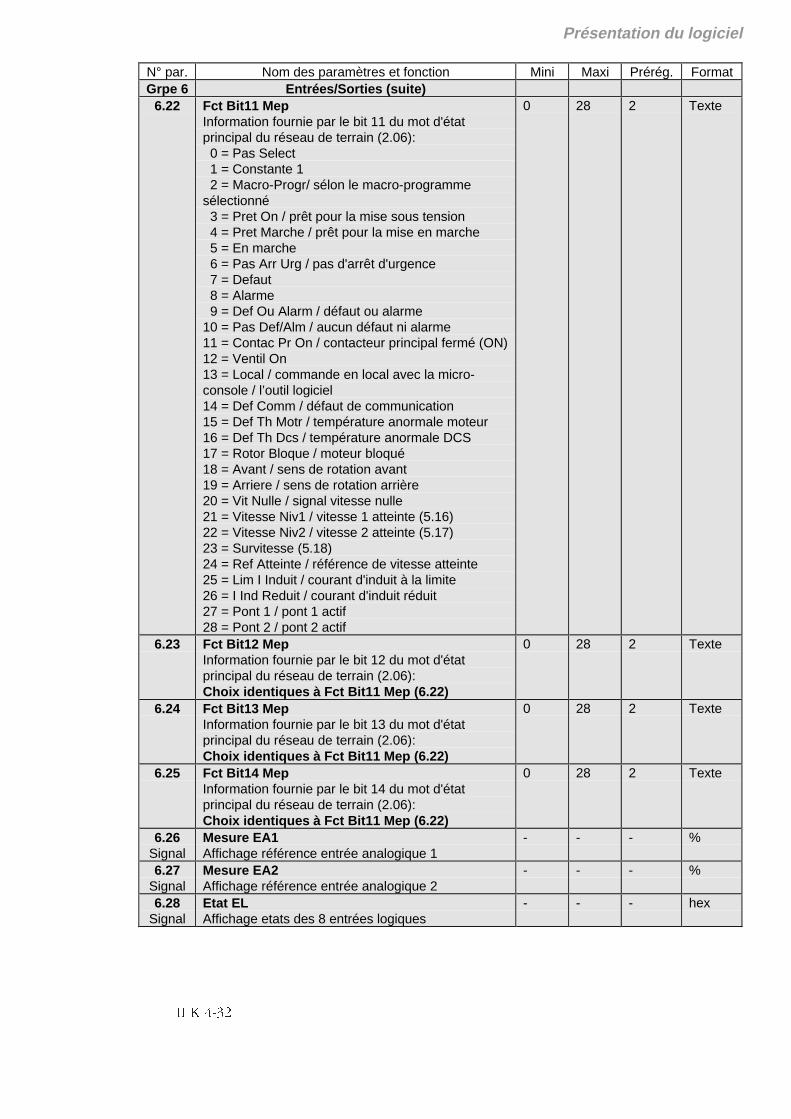
II K 4-32
Présentation du logiciel
N° par. Nom des paramètres et fonction Mini Maxi Prérég. FormatGrpe 6 Entrées/Sorties (suite)
6.22 Fct Bit11 MepInformation fournie par le bit 11 du mot d'étatprincipal du réseau de terrain (2.06): 0 = Pas Select 1 = Constante 1 2 = Macro-Progr/ sélon le macro-programmesélectionné 3 = Pret On / prêt pour la mise sous tension 4 = Pret Marche / prêt pour la mise en marche 5 = En marche 6 = Pas Arr Urg / pas d'arrêt d'urgence 7 = Defaut 8 = Alarme 9 = Def Ou Alarm / défaut ou alarme10 = Pas Def/Alm / aucun défaut ni alarme11 = Contac Pr On / contacteur principal fermé (ON)12 = Ventil On13 = Local / commande en local avec la micro-console / l’outil logiciel14 = Def Comm / défaut de communication15 = Def Th Motr / température anormale moteur16 = Def Th Dcs / température anormale DCS17 = Rotor Bloque / moteur bloqué18 = Avant / sens de rotation avant19 = Arriere / sens de rotation arrière20 = Vit Nulle / signal vitesse nulle21 = Vitesse Niv1 / vitesse 1 atteinte (5.16)22 = Vitesse Niv2 / vitesse 2 atteinte (5.17)23 = Survitesse (5.18)24 = Ref Atteinte / référence de vitesse atteinte25 = Lim I Induit / courant d'induit à la limite26 = I Ind Reduit / courant d'induit réduit27 = Pont 1 / pont 1 actif28 = Pont 2 / pont 2 actif
0 28 2 Texte
6.23 Fct Bit12 MepInformation fournie par le bit 12 du mot d'étatprincipal du réseau de terrain (2.06):Choix identiques à Fct Bit11 Mep (6.22)
0 28 2 Texte
6.24 Fct Bit13 MepInformation fournie par le bit 13 du mot d'étatprincipal du réseau de terrain (2.06):Choix identiques à Fct Bit11 Mep (6.22)
0 28 2 Texte
6.25 Fct Bit14 MepInformation fournie par le bit 14 du mot d'étatprincipal du réseau de terrain (2.06):Choix identiques à Fct Bit11 Mep (6.22)
0 28 2 Texte
6.26Signal
Mesure EA1Affichage référence entrée analogique 1
- - - %
6.27Signal
Mesure EA2Affichage référence entrée analogique 2
- - - %
6.28Signal
Etat ELAffichage etats des 8 entrées logiques
- - - hex
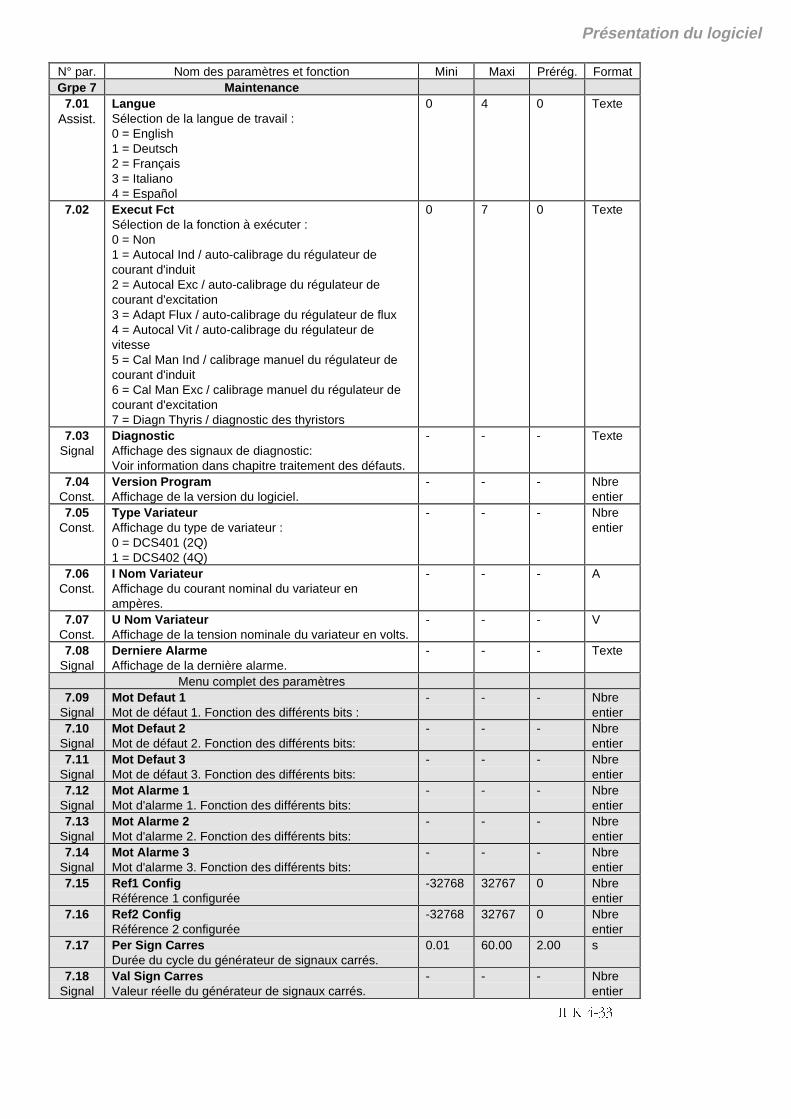
II K 4-33
N° par. Nom des paramètres et fonction Mini Maxi Prérég. FormatGrpe 7 Maintenance
7.01Assist.
LangueSélection de la langue de travail :0 = English1 = Deutsch2 = Français3 = Italiano4 = Español
0 4 0 Texte
7.02 Execut FctSélection de la fonction à exécuter :0 = Non1 = Autocal Ind / auto-calibrage du régulateur decourant d'induit2 = Autocal Exc / auto-calibrage du régulateur decourant d'excitation3 = Adapt Flux / auto-calibrage du régulateur de flux4 = Autocal Vit / auto-calibrage du régulateur devitesse5 = Cal Man Ind / calibrage manuel du régulateur decourant d'induit6 = Cal Man Exc / calibrage manuel du régulateur decourant d'excitation7 = Diagn Thyris / diagnostic des thyristors
0 7 0 Texte
7.03Signal
DiagnosticAffichage des signaux de diagnostic:Voir information dans chapitre traitement des défauts.
- - - Texte
7.04Const.
Version ProgramAffichage de la version du logiciel.
- - - Nbreentier
7.05Const.
Type VariateurAffichage du type de variateur :0 = DCS401 (2Q)1 = DCS402 (4Q)
- - - Nbreentier
7.06Const.
I Nom VariateurAffichage du courant nominal du variateur enampères.
- - - A
7.07Const.
U Nom VariateurAffichage de la tension nominale du variateur en volts.
- - - V
7.08Signal
Derniere AlarmeAffichage de la dernière alarme.
- - - Texte
Menu complet des paramètres7.09
SignalMot Defaut 1Mot de défaut 1. Fonction des différents bits :
- - - Nbreentier
7.10Signal
Mot Defaut 2Mot de défaut 2. Fonction des différents bits:
- - - Nbreentier
7.11Signal
Mot Defaut 3Mot de défaut 3. Fonction des différents bits:
- - - Nbreentier
7.12Signal
Mot Alarme 1Mot d'alarme 1. Fonction des différents bits:
- - - Nbreentier
7.13Signal
Mot Alarme 2Mot d'alarme 2. Fonction des différents bits:
- - - Nbreentier
7.14Signal
Mot Alarme 3Mot d'alarme 3. Fonction des différents bits:
- - - Nbreentier
7.15 Ref1 ConfigRéférence 1 configurée
-32768 32767 0 Nbreentier
7.16 Ref2 ConfigRéférence 2 configurée
-32768 32767 0 Nbreentier
7.17 Per Sign CarresDurée du cycle du générateur de signaux carrés.
0.01 60.00 2.00 s
7.18Signal
Val Sign CarresValeur réelle du générateur de signaux carrés.
- - - Nbreentier
Présentation du logiciel

II K 4-34
Pour une description détaillée cf. "Interface réseau de terrain"
N° par. Nom des paramètres et fonction Mini Maxi Prérég. FormatGrpe 8 Comm serie
Menu complet des paramètres8.01 Par1 Comm Serie
0 = Non1 = Comm Serie2 = Port RS2323 = Port M-Conso4 = Rearm Comser.
0 65535 4 Texte
8.02 Par2 Comm Serie 0 65535 0 Nbreentier
8.03 Par3 Comm Serie 0 65535 0 Nbreentier
8.04 Par4 Comm Serie 0 65535 0 Nbreentier
8.05 Par5 Comm Serie 0 65535 0 Nbreentier
8.06 Par6 Comm Serie 0 65535 0 Nbreentier
8.07 Par7 Comm Serie 0 65535 0 Nbreentier
8.08 Par8 Comm Serie 0 65535 0 Nbreentier
8.09 Par9 Comm Serie 0 65535 0 Nbreentier
8.10 Par10 Com Serie 0 65535 0 Nbreentier
8.11 Par11 Com Serie 0 65535 0 Nbreentier
8.12 Par12 Com Serie 0 65535 0 Nbreentier
8.13 Par13 Com Serie 0 65535 0 Nbreentier
8.14 Par14 Com Serie 0 65535 0 Nbreentier
8.15 Par15 Com Serie 0 65535 0 Nbreentier
8.16 Par16 Com Serie 0 65535 0 Nbreentier
Présentation du logiciel

5 Installation
II K 5-1
Généralités
Vérifications à la réceptionVérifiez le contenu de la livraison. Le carton d'embal-lage doit contenir :• le DCS 400• ce manuel• le gabarit pour le montage de l'appareil• Le mini-guide d'installation et de mise en serviceVérifiez que tous les éléments de la livraison sont enparfait état. En cas de problème, contactez votresociété d'assurance ou votre fournisseur.Avant de procéder à l'installation et à la mise en routedu variateur, assurez-vous que les données de laplaque signalétique et que la version du variateurcorrespondent effectivement aux spécifications de lacommande.Si la livraison est incomplète ou ne correspond pas àla commande, contactez votre fournisseur.
ATTENTION!Le variateur pèse relativement lourd et ne doit enaucun cas être soulevé par son capot avant. L'appa-reil ne doit être couché que sur sa paroi arrière. Il doitêtre manipulé avec précaution pour éviter tout acci-dent ou dégât matériel.
Stockage et manutentionSi l'appareil doit être stocké avant son installation ouêtre déplacé de son lieu d'origine, vérifiez que lescontraintes d'environnement sont respectées.
Plaque signalétiqueChaque variateur comporte une plaque signalétiquesur laquelle figurent la référence complète de l'appa-reil et son numéro de série, qui identifient chaqueappareil individuellement.La référence complète reflète les spécificités et laconfiguration de votre appareil.
Les caractéristiques techniques, informations et des-criptifs sont valables à la date de mise sous presse duprésent manuel. ABB se réserve le droit d'apportertoute modification.
Pour toute question concernant votre système d'en-traînement, n'hésitez pas à contacter votre corres-pondant ABB.
II K 5-2
5.1 Consignes de sécurité
1. Généralités
En service et selon leur degré de protection, les variateurs peuventavoir des organes sous tension, non isolés, ainsi que des pièces enmouvement ou en rotation, de même que des surfaces chaudes.
Le démontage non autorisé des panneaux et couvercles de protec-tion, l'utilisation non conforme, les erreurs d'installation ou d'utilisa-tion peuvent être à l'origine d'accident ou de dégât matériel.
Pour toute information complémentaire, consultez la documenta-tion.
Toutes les opérations de manutention, d'installation, de mise enservice et de maintenance doivent être réalisées uniquement par unpersonnel technique qualifié (respect des exigences CEI 364 ouCENELEC HD 384 ou DIN VDE 0100 et CEI 664 ou DIN/VDE 0110et des règles de sécurité en vigueur!).
Dans le contexte de ces règles de sécurité de base, nous entendonspar “personnel technique qualifié” toutes les personnes au fait desmodes d'installation, de montage, de mise en service et d'exploita-tion du produit et qualifiées pour exercer leurs fonctions.
2. Domaine d'utilisation
Les variateurs sont des composants destinés à être installés dansun équipement ou une machine électrique.
Dans le cas d'une installation dans une machine, la mise en servicedu variateur (c'est-à-dire son démarrage en service normal) estinterdite tant que la machine n'est pas déclarée conforme auxdispositions de la directive 89/392/CEE (Directive Machines). Lesexigences de la norme EN 60204 doivent être satisfaites.
La mise en service (c'est-à-dire le démarrage en service normal) estautorisée uniquement lorsque la conformité avec la directive CEM(89/336/CEE) a été établie.
Les variateurs satisfont les exigences de la directive Basse Tension73/23/CEE. Ils doivent être en conformité avec les normes harmo-nisées de la série prEN 50178/DIN VDE 0160 et les normes EN60439-1/ VDE 0660, partie 500, et EN 60146/ VDE 0558.
Les caractéristiques techniques de même que les informations surl'alimentation électrique figurent sur la plaque signalétique et dansla documentation, et doivent être rigoureusement respectées.
3. Transport, stockage
Les consignes pour le transport, le stockage et l'exploitation doiventêtre respectées.
Les contraintes d'environnement sont en conformité avec les exi-gences de la norme prEN 50178.
4. Installation
L'installation et le refroidissement des appareils doivent respecterles instructions figurant dans la documentation correspondante.
Les variateurs ne doivent être soumis à aucune contrainte. Aucunconstituant ne doit être plié et les distances minimales de séparationdoivent être respectées en cours de transport ou de manutention.Evitez tout contact avec les composants électroniques ou électri-ques.
Les variateurs contiennent des composants sensibles aux déchar-ges électrostatiques et susceptibles d'être endommagés en casd'utilisation inappropriée. Les appareillages électriques ne doiventpas être endommagés mécaniquement ou détruits (risque d'acci-dent).
5. Raccordements électriques
Lors de toute intervention sur des variateurs sous tension, laréglementation et les règles de sécurité en vigueur (ex. VBG 4)doivent être respectées.L'installation électrique doit être réalisée en respectant les spécifi-cations énoncées (ex., section des conducteurs, protection parfusibles, raccordement du PE). Pour toute information complémen-taire, consultez la documentation.
Les consignes d'installation liées aux règles de CEM (blindage, miseà la terre, emplacement des filtres et câblage) figurent dans ladocumentation technique. Elles doivent toujours être respectées,même pour les variateurs portant le marquage CE. Le respect desvaleurs limites imposées par la réglementation CEM incombe auconstructeur de l'installation ou de la machine.
6. Exploitation
Les installations incluant des variateurs doivent être équipées dedispositifs de commande et de protection supplémentaires confor-mément à la réglementation et aux règles de sécurité en vigueur(ex., décrets, règles de prévention des accidents, etc). Les modifi-cations apportées aux variateurs au moyen du logiciel d'exploitationsont autorisées.
Après sectionnement de l'alimentation du variateur, vous devezéviter tout contact immédiat avec les organes et bornes sous tensiondu fait des éventuels condensateurs encore chargés. A cet égard,le contenu des étiquettes et mises en garde doit être respecté.
En cours de fonctionnement, tous les couvercles et panneauxd'accès doivent être maintenus fermés.
7. Maintenance et entretien
Veuillez respecter les consignes contenues dans la documentationdu constructeur.
CONSERVEZ SOIGNEUSEMENT CES CONSIGNES DE SECU-RITE !
en conformité avec la directive basse tension 73/23/CEE
Installation

II K 5-3
Mises en gardeLes symboles de mise en garde attirent l'attention de l'utilisateur surle fait que le non-respect de la procédure décrite est susceptible deprovoquer un défaut de fonctionnement important, d'endommagersérieusement l'appareil, de provoquer des blessures graves, voiremortelles. Les symboles suivants sont utilisés :
Danger: Haute tension :
Ce symbole attire votre attention sur le fait que des tensions élevéespeuvent provoquer des blessures graves et/ou endommager lematériel. Le texte qui s'y rapporte décrit la manière de se prémunirde ce danger.
• Tous les travaux d'installation et de maintenance électriques surle variateur doivent être réalisés par un personnel parfaitementqualifié et formé au génie électrique.
• Le variateur ainsi que tous les équipements avoisinants doiventêtre correctement mis à la terre par un personnel qualifié.
• Vous ne devez JAMAIS intervenir sur un variateur sous tension.Après mise hors tension, mesurez l'absence effective de tensiondans le variateur (au moyen d'un instrument de mesure appro-prié) avant toute intervention.
• Même lorsque le variateur est sectionné de l'alimentation réseau,ce dernier peut contenir des niveaux de tension dangereux issusde circuits de commande externes. Vous devez donc prendretoutes les précautions nécessaires avant d'intervenir! Le non-respect des consignes de sécurité peut provoquer des blessuresgraves, voire mortelles !
Mise en garde générale :
Ce symbole met en garde contre les risques et dangers d'origine nonélectrique susceptibles de provoquer des blessures graves, voiremortelles, et/ou des dégâts matériels. Le texte qui s'y rapporte décritla manière de se prémunir de ce danger.
• L'utilisation des variateurs à thyristors élargit les possibilités defonctionnement des moteurs électriques, des organes de trans-mission et des machines entraînées, ce qui signifie que tous ceséléments doivent être en mesure de supporter des chargesrelativement élevées.
• Assurez-vous que tous les équipements concernés sonteffectivement conçus pour supporter ces conditions de fonc-tionnement
• Si vous devez faire fonctionner le variateur avec un moteurde tension nominale et/ou d'intensité nominale trèsinférieure(s) aux valeurs nominales du variateur, prenez lesmesures nécessaires pour protéger l'appareil des survites-ses, surcharges, dysfonctionnements, etc., en apportant lesmodifications nécessaires à la configuration logicielle oumatérielle.
• Pour les mesures d'isolement, vous devez débrancher tousles câbles du variateur. Evitez tout fonctionnement hors desvaleurs nominales. Le non-respect de ces règles peut en-dommager le variateur de manière irréversible.
• Le variateur intègre plusieurs fonctions de réarmement automa-tique. Lorsque ces fonctions sont mises en service, elles réar-ment l'appareil et le redémarrent à la suite d'un défaut. Cesfonctions ne doivent pas être mises en service en cas d'incompa-tibilité des autres équipements avec ce mode de fonctionnementou si celui-ci présente un danger.
Risques de décharges électrostatiques :
Ce symbole attire votre attention sur les risques de déchargesélectrostatiques pouvant endommager l'appareil. Le texte qui s'yrapporte décrit la manière de se prémunir de ce danger.
RemarquesLes remarques attirent l'attention de l'utilisateur sur des pointsparticuliers ou des éléments d'information complémentaires. Lestermes suivants sont utilisés :
ATTENTION !Attire l'attention de l'utilisateur sur un point particulier.
NotaSignale des éléments d'information complémentaires ou metl'accent sur un point précis.
Raccordement au réseauVous pouvez utiliser un sectionneur (à fusibles) sur l'alimentation depuissance du variateur pour isoler ses composants électriques de lasource d'énergie lors des opérations d'installation et de maintenan-ce. Le sectionneur à utiliser sera un sectionneur-interrupteur de typeprescrit par la classe B de la normeEN 60947-3 pour respecter la réglementation européenne, ou detype à disjoncteur capable de sectionner le circuit en charge par lebiais d'un contact auxiliaire ouvrant les contacts principaux dudisjoncteur. Le sectionneur réseau doit être consigné en position"OUVERTE" pendant toute la durée des travaux d'installation et demaintenance.
ARRETS D'URGENCEDes arrêts d'urgence doivent être installés sur chaque poste detravail et sur toute machine nécessitant cette fonction.
Domaine d'utilisationIl nous est impossible de couvrir, dans ce manuel, toutes lesconfigurations envisageables, ou de fournir les instructions d'exploi-tation ou de maintenance pour tous les cas possibles. C'est la raisonpour laquelle nous ne pouvons que définir les règles à mettre enoeuvre par un personnel qualifié pour le fonctionnement normal desmachines et des dispositifs au sein d'installations industrielles.
Si, pour une application spéciale, les machines et dispositifs électri-ques sont destinés à être utilisés dans un environnement non-industriel - avec des contraintes de sécurité plus sévères (ex.,protection spéciale pour les enfants ou autres cas particuliers), lesconsignes de sécurité supplémentaires pour l'installation doiventêtre fournies par le client pendant le montage sur site.
Mises en garde les plus courantes Installation

5.2 Règles pour une installation conforme CEM
Généralités
Tension dangereuse
Les filtres réseau contiennent des condensateurs quipeuvent maintenir sous tension dangereuse les bor-nes après mise hors tension réseau. Le décharge-ment des résistances internes prend quelques se-condes. Par conséquent, vous devez attendre aumoins 10 s et mesurer la tension avant toute inter-vention sur l'équipement.
Consignes de sécurité générales
Les machines ou dispositifs électriques sont descomposants d'équipement utilisés dans les installa-tions de puissance industrielles. En fonctionnement,certains organes sont sous tension et à nu, ou enmouvement, en rotation, etc. Ils peuvent provoquerdes dégâts matériels importants ou des blessuresgraves si, par exemple, les couvercles ne sont pasfermés ou s'ils sont utilisés ou exploités incorrecte-ment.
Vous devez par conséquence, vous assurer que- seules les personnes qualifiées sont autorisées à
intervenir sur ces machines et dispositifs,- ces personnes disposent toujours - entre autres
choses - du manuel d'exploitation et des autresdocuments techniques livrés avec le produit lors-qu'elles doivent intervenir sur l'équipement et ellesrespectent les consignes y figurant,
- les personnes non qualifiées ne sont pas autori-sées à intervenir sur ou à proximité de ces machi-nes et dispositifs.
Il nous est impossible de couvrir, dans ce manuel,toutes les configurations envisageables, ou de fournirles instructions d'exploitation ou de maintenance pourtous les cas possibles. C'est la raison pour laquellenous ne pouvons que définir les règles à mettre enoeuvre par un personnel qualifié pour le fonctionne-ment normal des machines et des dispositifs au seind'installations industrielles.
Si, pour une application spéciale, les machines etdispositifs électriques sont destinés à être utilisésdans un environnement non-industriel - avec descontraintes de sécurité plus sévères (ex., protectionspéciale pour les enfants ou autres cas particuliers),les consignes de sécurité supplémentaires pour l'ins-tallation doivent être fournies par le client pendant lemontage sur site.
Les raccordements à la terre doivent être réalisésconformément à la norme CEI 364 !
Les normes suivantes doivent être respectéespour une installation conforme CEM des sitesindustriels et machines au sein de l'UE:
EN 61800-3 Entraînements électriques depuissance à vitesse variable -norme de produit relative à laCEM - Limites d'immunité etd'émission (premier etdeuxième environnements).
EN 50082-2 Norme générique ImmunitéEnvironnement industriel
EN 50081-2 Norme générique EmissionEnvironnement industriel
NOTA!
La procédure de conformité relève de ladouble responsabilité d'ABB Industrie-technik AG et du constructeur de lamachine ou du site industriel, ce enfonction de la part des travaux qui leurincombe pour l'équipement électrique.
Définitions Terre, mise à la terre à des fins de sécurité
Masse, mise à la masse ou au châssis defaible inductance pour assurer la CEM.
Important pour les installations avecfiltres réseau
Filtre installé sur un réseau mis à la terre(réseau à régime de neutre TN ou TT)Ces filtres ne peuvent être utilisés que sur des ré-seaux mis à la terre (ex., réseaux publics européens400 V). Selon la norme EN 61800-3, ils sont incompa-tibles avec les réseaux industriels isolés équipés detransformateurs d'alimentation, car susceptibles d'êtreà l'origine de problèmes de sécurité sur les réseaux àneutre isolé ou impédant (réseaux IT).
Détection des défauts de terreEnsemble, les filtres (avec résistances de déchargeinternes), les câbles, le convertisseur et le moteur ontune capacité considérable à la terre susceptible deprovoquer un courant à la terre capacitif accru. Leseuil de déclenchement d'un détecteur de défaut deterre qui mesure ce courant doit être adapté à cettevaleur supérieure.
Essai diélectriqueDu fait des condensateurs du filtre réseau, l'essaidiélectrique doit être réalisé sous tension c.c. pourprotéger les composants.
II K 5-4
Installation

II K 5-5
Classification Installation
Classification
MMMMMM
Commutation choke
Industrial or "Second" environment
EN 50081-2
Light industrial / Residental or "First" environment
EN 50081-1
Legend
unscreened cable with limitation, see 2.5
screened cable, see 2.4.2
Line filter
Line choke
Convertertransformer with grounded
screen and grounded iron core
Insulated industrial low voltage line for up to 1000V with ground conductor
Groundedstar point
Supply transformer of a residental region with light industry (rated power normally ≤ 1.2 MVA)
Grounded public 400V line with neutral conductor
Medium-voltage line
To other loads which must be protected against line pollution caused by converters (HF disturbance and commutation notches).
Mounting plate
Line filter
Line choke
A separation transformer with grounded screen and with grounded iron core makes the line filter and the line choke unnecessary.
Operation with separate converter transformer. If there are other loads at the same secondary winding they have to withstand the commutation notches, caused by the converter. In some cases commutation chokes are necessary (see 1.4).
Operation at the public low voltage line together with other loads of all kinds except some kinds of sensitive communication means.
Operation at the public low voltage line together with other loads of all kinds
Figures e.g. see 3.1 or explanation available in chapter 3, paragraph 1
Supply transformer of a industry region (rated power normally ≤ 1.2 MVA)
Mountingplate
Groundedstar point
Converter Converter Converter Converter
alte
rnat
ive
alte
rnat
ive
Grounded public 400V line with neutral conductor
Mountingplate
Medium-voltage line
The field supply is not shown in this synopsis drawing. The rules for the field supply cables are the same as for the armature supply cables.
Transformateur-convertisseuravec blindage
à la terre etnoyau de ferà la terre
Réseau usine BTisolé 1000 V maxiavec conducteur deterre
Neutreà la terre Réseau public 400 V à
la terre avec conduc-teur neutre
Transformateur d'ali-mentation d'une zoneindustrielle (puissanceassignée normale ó1,2 MVA)
Neutreà la terre
Réseau public 400 V àla terre avec conduc-teur neutre
Transformateur d'ali-mentation d'une zoneindustrielle (puissanceassignée normale ó1,2 MVA)
Réseau MT
Alimentation pour transformateur-convertis-seur séparé. Si d'autres charges sont raccor-dées sur l'enroulement secondaire, elles doi-vent offrir une bonne tenue aux encoches decommutation provoquées par le convertisseur.Dans certains cas, les inductances de com-mutation sont nécessaires
Alimentation par le réseau public BT,alimentant également d'autres char-ges de tous types, à l'exception decertains moyens de communicationsensibles
Alimentation par le réseaupublic BT, alimentant éga-lement d'autres chargesde tous types
Un transformateur de sépara-tion avec blindage à la terre etnoyau de fer à la terre évite lemontage d'un filtre réseau etd'une self réseau
Vers d'autres charges qui doi-vent être protégées de la pollu-tion du réseau par les conver-tisseurs (perturbations HF etencoches de commutation)
Plaque demontage
Plaque demontage
Convertisseur Convertisseur Convertisseur Convertisseur
Plaque demontage
Filtre réseau Filtre réseau
Self réseauSelf réseauSelf de
commutation
Environnement industriel ou"deuxième" environnement
Environnement industrie légère / résidentielou "premier" environnement
Excitation non-illustrée. Les règles pour les câbles d'excitationsont les mêmes que pour les câbles d'induit.
Câble blindéCâble non-blindé avec restriction
Légende
Réseau MT
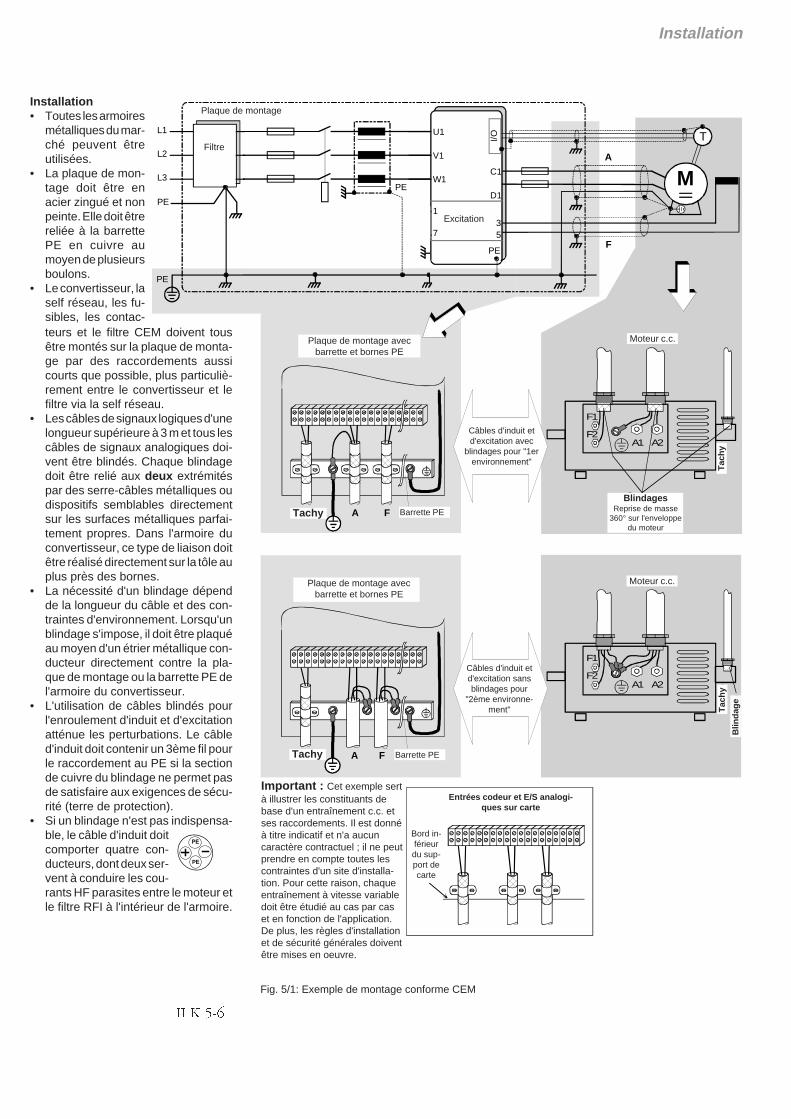
II K 5-6
Installation
Fig. 5/1: Exemple de montage conforme CEM
Important : Cet exemple sertà illustrer les constituants debase d'un entraînement c.c. etses raccordements. Il est donnéà titre indicatif et n'a aucuncaractère contractuel ; il ne peutprendre en compte toutes lescontraintes d'un site d'installa-tion. Pour cette raison, chaqueentraînement à vitesse variabledoit être étudié au cas par caset en fonction de l'application.De plus, les règles d'installationet de sécurité générales doiventêtre mises en oeuvre.
PE
PE
Installation• Toutes les armoires
métalliques du mar-ché peuvent êtreutilisées.
• La plaque de mon-tage doit être enacier zingué et nonpeinte. Elle doit êtrereliée à la barrettePE en cuivre aumoyen de plusieursboulons.
• Le convertisseur, laself réseau, les fu-sibles, les contac-teurs et le filtre CEM doivent tousêtre montés sur la plaque de monta-ge par des raccordements aussicourts que possible, plus particuliè-rement entre le convertisseur et lefiltre via la self réseau.
• Les câbles de signaux logiques d'unelongueur supérieure à 3 m et tous lescâbles de signaux analogiques doi-vent être blindés. Chaque blindagedoit être relié aux deux extrémitéspar des serre-câbles métalliques oudispositifs semblables directementsur les surfaces métalliques parfai-tement propres. Dans l'armoire duconvertisseur, ce type de liaison doitêtre réalisé directement sur la tôle auplus près des bornes.
• La nécessité d'un blindage dépendde la longueur du câble et des con-traintes d'environnement. Lorsqu'unblindage s'impose, il doit être plaquéau moyen d'un étrier métallique con-ducteur directement contre la pla-que de montage ou la barrette PE del'armoire du convertisseur.
• L'utilisation de câbles blindés pourl'enroulement d'induit et d'excitationatténue les perturbations. Le câbled'induit doit contenir un 3ème fil pourle raccordement au PE si la sectionde cuivre du blindage ne permet pasde satisfaire aux exigences de sécu-rité (terre de protection).
• Si un blindage n'est pas indispensa-ble, le câble d'induit doitcomporter quatre con-ducteurs, dont deux ser-vent à conduire les cou-rants HF parasites entre le moteur etle filtre RFI à l'intérieur de l'armoire.
M
A1 A2
F1
F2
A1 A2
F1
F2
L1
L2
L3
PE
U1
V1
W1C1
D1
1
7 53
PE
PE
PE
PE
A
F
A FTacho
A FTacho
TI/O
Mounting plate
DC motor
Tac
ho
ScreensContact to the motorhousing at the whole
screen perimeter
Filter
Mounting plate with PE bar and terminals
PE bar
DC motor
Tac
hoS
cree
n
Mounting plate with PEbar and terminals
PE bar
lower edgeof the PCB
carrier
Encoder inputs andanalogue I/O at the PCB
Fieldsupplyunit
Armature and field cables with screens for
"first environment"
Armature and field cables without
screens suitable for "second
environment"
Plaque de montage
Filtre
Excitation
Plaque de montage avecbarrette et bornes PE
Câbles d'induit etd'excitation avec
blindages pour "1erenvironnement"
Moteur c.c.
Plaque de montage avecbarrette et bornes PE
Moteur c.c.
BlindagesReprise de masse
360° sur l'enveloppedu moteur
Câbles d'induit etd'excitation sansblindages pour
"2ème environne-ment"
Barrette PE
Entrées codeur et E/S analogi-ques sur carte
Bord in-férieurdu sup-port decarte
Blin
dage
PE
Barrette PE
Tachy
Tachy
Tac
hyT
achy

5.3 Exemple de raccordement des signaux logiques et analogiques à un API
Fig. 5/2: Exemple de raccordement des signaux logiques et analogiques à un API
II K 5-7
Installation
_+
IN OU
T
C 1
D 1
X98
:
DO
5
12
34
45
X99
:1
23
U1W
1V1
PE
X10
:1
2
AIT
AC
AI1
AI2
+10
V-1
0VA
O1
AO
2D
I1D
I2D
I3D
I4D
I5D
I6D
I7D
I8+
24V
DO
1D
O2
DO
3D
O4
__
++
TT
K198
:1
98:2
F6
1 2F
4
1 2F
5
1 2
115.
..23
0V 5
0H
z
L1N
L1L2
L3
400V
50H
z
F1
K1
13
5
24
6
L1
M
0V0V
0V
X1:
12
34
12
34
56
78
9X
4:1
23
45
67
89
10X
5:1
23
45
X3:
X2:
+ _
S1 21
DD
CS
Nxx
x-0
1xx
xxxx
xxA
DA
PT
ER
BU
ST
ER
MIN
AT
ION
ON
OFF
RX
D
TX
D
PE
SH
FD
GD
(N)
D(P
)
X1
X2
PE
SH
FD
GD
(N)
D(P
)S
H
XM
IT
RE
C
ER
RO
R
+24
V0V
SH
3&
X7:X6:
X8:
+24
V
RS
232
4 A
0V
M ~
12
34
56
78
'&6
++
__
5.02
6.01 / 6.02
6.03 / 6.04
6.05 / 6.06 / 6.07
6.08 / 6.09 / 6.10
2.01
6.11
6.12
6.13
6.14
5.02
5.03
1.01 / 1.02
1.05 / 1.06
1.02 / 1.03
8.01 ... 8.16
6.15
AO
-+
-+
-+
-+
AI
DO
DI
Par
amet
er
A+
A-
B+
B-
Z+
Z-
0 V
US
DC
S 4
00 P
AN
**
Car
te d
e co
mm
ande
(C
ON
-3)
Mod
ule
conv
ertis
seur
Mod
ule
d’ex
cita
tion
Pol
arité
s ill
ustr
ées
pour
fonc
tionn
emen
t en
mod
e m
oteu
r
(Fib
re o
ptiq
ue)
Rac
cord
emen
t du
vent
ilate
ur s
elon
type
de m
odul
e et
tens
ion
d'al
im.
Alim
enta
tion
Ven
tilat
eur *
Uni
q. n
éces
saire
en m
ode
récu
péra
tion
éner
gie
defr
eina
ge
EA
1E
A2
EL1
EL2
EL
3E
L4
EL
5E
L6E
L7E
L8S
L1S
L2S
L4S
L3S
A1
SA
2
SL5
SA
EA
SL
EL
Uni
pola
ireou
bip
olai
re±1
0V
Uni
pola
ireou
bip
olai
re±1
0V
$3,

II K 5-8
Installation

6 Exploitation
II K 6-1
GénéralitésCe manuel s'adresse aux personnes chargées del'étude, l'installation, la mise en route et l'entretien duvariateur.Il est exigé de ces personnes :
• les connaissances de base indispensables enphysique et électricité, câblage électrique, compo-sants électroniques et schématique électronique,et
• une expérience minimale des variateurs et pro-duits à courant continu.
Utilisation de la micro-consoleDCS 400 PANLa micro-console est l'interface homme-machine ser-vant au paramétrage, à l'affichage des valeurs demesure et à la commande des variateurs de la sérieDCS 400.
Liaison micro-consoleLa micro-console DCS 400 PAN est reliée au varia-teur via une interface série et est débrochable avec levariateur sous tension.
InitialisationDès mise sous tension de l'électronique, la micro-console affiche les valeurs réelles.
Mode OUPUTLa micro-console peut afficher jusqu'à 4 valeursréelles, trois sur la première ligne et une sur ladeuxième ligne. L'utilisateur peut choisir les valeursaffichées au moyen des paramètresVal1...4 Afficheur .
Touches à flècheSélectionner un groupe ou un paramè-tre, ou modifier la valeur d'un paramètre.Mention: En mode du réglage des paramètresla vitesse de réglage peut être augmenté enappuyant sur MENU en même temps.
MENUPermuter entre le mode OUTPUT et leMENU des paramètres, ou quitter cesmodes.
ON/OFFSi le variateur est arrêté:Mise sous tension du variateur etordre de marche.
Si le variateur est en service:Arrêt du variateur selon le typed'arrêt paramétré, suivi de samise hors tension (uniquement enmode local).
Afficheur1ère ligne : 20 caractères2ème ligne : 12 caractères3ème ligne : ligne d'état
LOC/REMPermuter entre la commande en
mode local et externe
Changer le sens de rotationModifie la polarité de la valeur de ré-férence (uniquement en mode local)
ENTERSélectionner le groupe/paramètre,et valider le nouveau paramétra-ge.
440V 368A 1500rpm
1500rpmOUTPUT MENU AUTO OFF HAND REM LOC <RUN>
Val1 Afficheur (6.16)Ligne 1 gauche
Val2 Afficheur (6.17)Ligne 1 centre
Val3 Afficheur (6.18)Ligne 1 droite
Val4 Afficheur (6.19)Ligne 2 centre
RESETréarmement des défauts
Ligne d'étatOUTPUT Affichage valeurs réellesMENU MenuLOC visible LOCal
non visible REMote (externe)< sens de rotation arrièreRUN Variateur en marche> sens de rotation avant
LEDrouge: erreurverte: variateur prêt
Clignotant - alarme

II K 6-2
6.1 Micro-console
Micro-console: Mode Menu
Exploitation
OUTPUT MENU AUTO OFF HAND REM LOC <RUN>
1500rpm
440V 368A 1500rpm
Si OUTPUT est affiché sur la ligne d'état de la micro-console, appuyez sur la touche pour accéderau mode Menu, dans lequel vous accédez aux groupes de paramètres et aux fonctions. La dernièrefonction ou le dernier paramètre appelé vient s'afficher.
Après appuyer sur la touche , le premier groupe de paramètres (1 Donnees Moteur) vient toujourss'afficher.
Pour parcourir la liste des groupes de paramètres et des fonctions, utilisez les touches .
Pour sélectionner le groupe, le paramètre ou la fonction affichée, appuyez sur . L'élémentsélectionné vient alors s'afficher.
Mode OUTPUT
1 Donnees Moteur2 Mode Exploitation3 Induit4 Excitation5 Regulat Vitesse6 Entrees/Sorties7 Maintenance8 Comm SeriePrereglages UsineCopie Vers M-ConsoleCopie Vers VariateurMenu Complet/CourtVerrou Micro-ConsoleContraste AfficheurConfiguration
Mode MENU
Groupes deparamètres
Fonction

II K 6-3
Micro-console : mode Paramétrage Exploitation
OUTPUT MENU AUTO OFF HAND REM LOC <RUN>
1500rpm
440V 368A 1500rpm
Les huit premiers éléments du Menu (groupes de paramètres) servent au paramétrage duvariateur.Pour accéder au groupe de paramètres désiré, sélectionnez-le dans la liste en la parcourant aumoyen des touches à flèche et validez votre choix par un appui sur . Les paramètres dece groupe viennent s'afficher. Pour sélectionner un paramètre, procédez comme pour lasélection d'un groupe. Le numéro, le nom et la valeur (soulignée) viennent s'afficher.
Seules les valeurs soulignées peuvent être modifiées au moyen des touches . Vousdevez valider la valeur modifiée par un appui sur . Pour conserver une valeur sans lamodifier, appuyez directement sur la touche . Après appui sur une de ces deux touches,vous revenez à l'étape de sélection des paramètres.
D'autres paramètres au sein d'un même groupe peuvent être directement sélectionnés. Pouraccéder à un autre groupe de paramètres, appuyez d'abord sur la touche pour revenir aumode Menu. Sélectionnez ensuite le groupe suivant au moyen des touches , etc.
ModeOUTPUT
1.01 I Nom Induit 200
1 Donnees Moteur2 Mode Exploitation3 Induit4 Excitation5 Regulat Vitesse6 Entrees/Sorties7 Maintenance8 Comm SeriePrereglages UsineCopie Vers M-ConsoleCopie Vers VariateurMenu Complet/CourtVerrou Micro-ConsoleContraste AfficheurConfiguration
Mode MENU Modification desparamètrages
1.01 I Nom Induit 200A1.02 U Nom Induit 420V1.03 I Nom Excitat 3.8A..................1.12 Limit I Vitesse
Sélection des paramètres
= valider
= annuler

II K 6-4
Micro-console : sélection des fonctions Exploitation
OUTPUT MENU AUTO OFF HAND REM LOC <RUN>
1500rpm
440V 368A 1500rpm
Les fonctions sont sélectionnées en mode Menu, votre choix étant validé par un appui sur.Dès validation, la fonction est exécutée :
Prereglages Usine Récupération de tous les préréglages usine des paramètres.
Récuperation Paramètres?Non Oui
Õ Fonction non executée.Õ Récuperation de tous les paramètres usine.
Copie Vers M-Console Copie de tous les paramétrages du variateur dans la micro-console
Lecture paramètres?Non Oui
Õ Fonction non executée. Pas de transfert.Õ Transfert des paramètres vers la micro-console.
Copie Vers Variateur Copie de tous les paramétrages de la micro-console dans le variateur.
Ecriture des paramètres?Non Oui
Õ Fonction non executée. Pas de transfert.Õ Transfert des paramètres vers le variateur.
Menu Complet/CourtCourt
CompletÕ Sélection du menu court des paramètresÕ Sélection du menu complet des paramètres
Verrou Micro-ConsoleNon
Pas EcriturePas Local
Lecture UniqVerrouille
Õ Accès à tous les paramètres et toutes les fonctionsÕ Modification des paramètres interditeÕ Commande du variateur en mode local (micro-console) interditeÕ Modification des paramètres et commande du variateur interditesÕ Accès uniquement à l'affichage des valeurs réellesAvant de pouvoir modifier le mode d'accès à la micro-console, vousdevez d'abord entrer le code d'accès (“400“).Sélectionnez le mode d'accès suivi d'un appui sur .
Entrez Code (PIN)0000 Entrez le code PIN avec les touches , suivi d'un appui sur .
Si le code entré est correct, le mode d'accès à la micro-console seramodifié, et l'affichage accessible en conséquence.Si le code entré est incorrect, le mode d'accès à la micro-console nesera pas modifié, le mode d'origine étant conservé.
Contraste AfficheurTouche Flech
Vous pouvez modifier le réglage du contraste de l'afficheur au moyendes touches . Le nouveau réglage apparaît immédiatement.
Configuration Cf. chapitre: Configuration assistée avec la micro-console.
Mode OUTPUT
1 Donnees Moteur2 Mode Exploitation3 Induit4 Excitation5 Regulat Vitesse6 Entrees/Sorties7 Maintenance8 Comm SeriePrereglages UsineCopie Vers M-ConsoleCopie Vers VariateurMenu Complet/CourtVerrou Micro-ConsoleContraste AfficheurConfiguration
Mode MENU
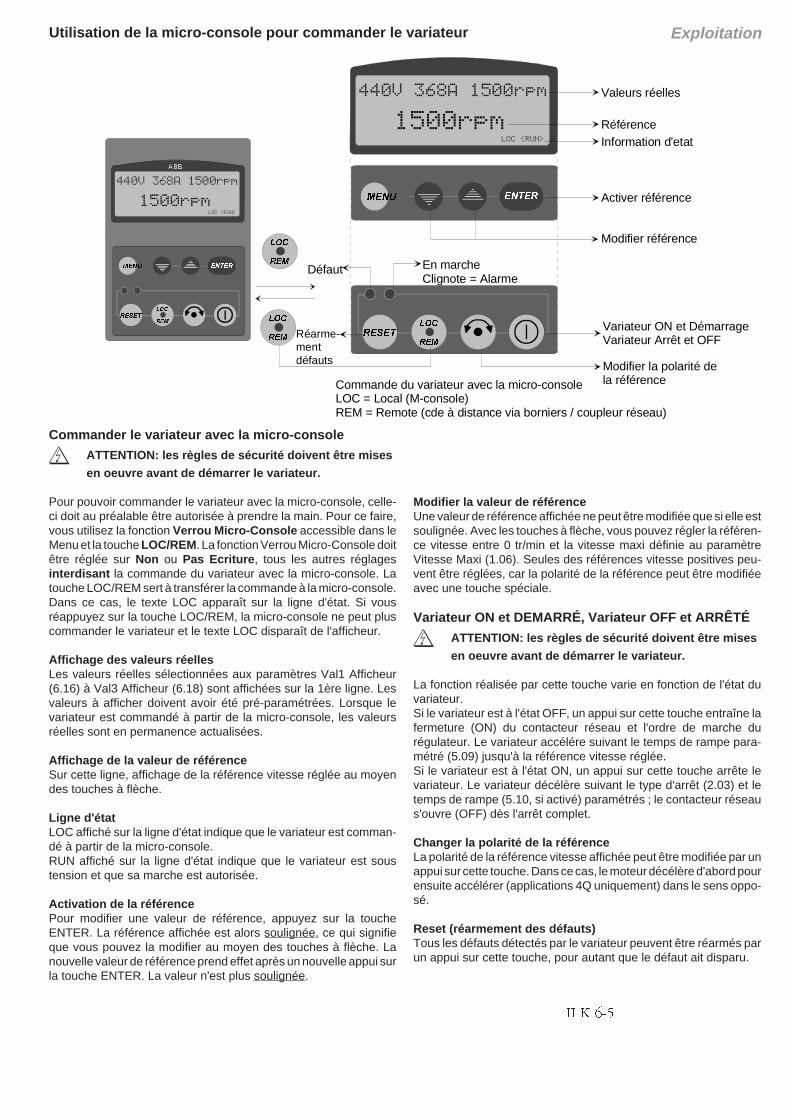
II K 6-5
Commander le variateur avec la micro-console
ATTENTION: les règles de sécurité doivent être mises
en oeuvre avant de démarrer le variateur.
Pour pouvoir commander le variateur avec la micro-console, celle-ci doit au préalable être autorisée à prendre la main. Pour ce faire,vous utilisez la fonction Verrou Micro-Console accessible dans leMenu et la touche LOC/REM. La fonction Verrou Micro-Console doitêtre réglée sur Non ou Pas Ecriture , tous les autres réglagesinterdisant la commande du variateur avec la micro-console. Latouche LOC/REM sert à transférer la commande à la micro-console.Dans ce cas, le texte LOC apparaît sur la ligne d'état. Si vousréappuyez sur la touche LOC/REM, la micro-console ne peut pluscommander le variateur et le texte LOC disparaît de l'afficheur.
Affichage des valeurs réellesLes valeurs réelles sélectionnées aux paramètres Val1 Afficheur(6.16) à Val3 Afficheur (6.18) sont affichées sur la 1ère ligne. Lesvaleurs à afficher doivent avoir été pré-paramétrées. Lorsque levariateur est commandé à partir de la micro-console, les valeursréelles sont en permanence actualisées.
Affichage de la valeur de référenceSur cette ligne, affichage de la référence vitesse réglée au moyendes touches à flèche.
Ligne d'étatLOC affiché sur la ligne d'état indique que le variateur est comman-dé à partir de la micro-console.RUN affiché sur la ligne d'état indique que le variateur est soustension et que sa marche est autorisée.
Activation de la référencePour modifier une valeur de référence, appuyez sur la toucheENTER. La référence affichée est alors soulignée, ce qui signifieque vous pouvez la modifier au moyen des touches à flèche. Lanouvelle valeur de référence prend effet après un nouvelle appui surla touche ENTER. La valeur n'est plus soulignée.
Modifier la valeur de référenceUne valeur de référence affichée ne peut être modifiée que si elle estsoulignée. Avec les touches à flèche, vous pouvez régler la référen-ce vitesse entre 0 tr/min et la vitesse maxi définie au paramètreVitesse Maxi (1.06). Seules des références vitesse positives peu-vent être réglées, car la polarité de la référence peut être modifiéeavec une touche spéciale.
Variateur ON et DEMARRÉ, Variateur OFF et ARRÊTÉ
ATTENTION: les règles de sécurité doivent être mises
en oeuvre avant de démarrer le variateur.
La fonction réalisée par cette touche varie en fonction de l'état duvariateur.Si le variateur est à l'état OFF, un appui sur cette touche entraîne lafermeture (ON) du contacteur réseau et l'ordre de marche durégulateur. Le variateur accélére suivant le temps de rampe para-métré (5.09) jusqu'à la référence vitesse réglée.Si le variateur est à l'état ON, un appui sur cette touche arrête levariateur. Le variateur décélère suivant le type d'arrêt (2.03) et letemps de rampe (5.10, si activé) paramétrés ; le contacteur réseaus'ouvre (OFF) dès l'arrêt complet.
Changer la polarité de la référenceLa polarité de la référence vitesse affichée peut être modifiée par unappui sur cette touche. Dans ce cas, le moteur décélère d'abord pourensuite accélérer (applications 4Q uniquement) dans le sens oppo-sé.
Reset (réarmement des défauts)Tous les défauts détectés par le variateur peuvent être réarmés parun appui sur cette touche, pour autant que le défaut ait disparu.
Utilisation de la micro-console pour commander le variateur Exploitation
(17(50(18
/2&
5(0
5(6(7
1500rpm
440V 368A 1500rpm
OUTPUT MENU AUTO OFF HAND REM LOC <RUN>
$%%
(17(50(18
/2&
5(0
5(6(7
/2&
5(0
1500rpm
440V 368A 1500rpm
OUTPUT MENU AUTO OFF HAND REM LOC <RUN>
/2&
5(0
Valeurs réelles
RéférenceInformation d'etat
Activer référence
Variateur ON et DémarrageVariateur Arrêt et OFF
Modifier la polarité de la référence
Modifier référence
Commande du variateur avec la micro-consoleLOC = Local (M-console)REM = Remote (cde à distance via borniers / coupleur réseau)
En marcheClignote = Alarme
Défaut
Réarme-ment défauts

II K 6-6
Exploitation6.2 Configuration assistée avec la micro-console
Les variateurs DCS 400 d'ABB peuvent être configu-rés en mode interactif. Cette procédure garantit uneconfiguration correcte et optimale.
Dans les pages qui suivent, nous décrivons la procé-dure de configuration assistée avec la micro-con-
sole. Les étapes de cette procédure et le dialoguehomme-machine sont décrits.
Touches utilisées pour la procédure de configuration :
Pour quitter la procédure deconfiguration ou revenir uneétape en arrière. Un appuisur la touche MENUprovoquera toujours l'arrêtd'une machine en rotation.
Pour faire défiler en arrière lecontenu des paramètres oudécrémenter leur valeur.
Pour faire défiler en avant lecontenu des paramètres ouincrémenter leur valeur.
Pour valider votre choix etpasser à l'étape suivante dela procédure de configurationou confirmer le choix dumode MENU.
(17(50(18
(17(50(18
/2&
5(0
5(6(7
1500rpm
440V 368A 1500rpm
OUTPUT MENU AUTO OFF HAND REM LOC <RUN>
$%%
Mettez l’électronique sous tension
Appuyez sur
Appuyez sur
l Appuyez sur
Suivez les instructions
0(18
(17(5
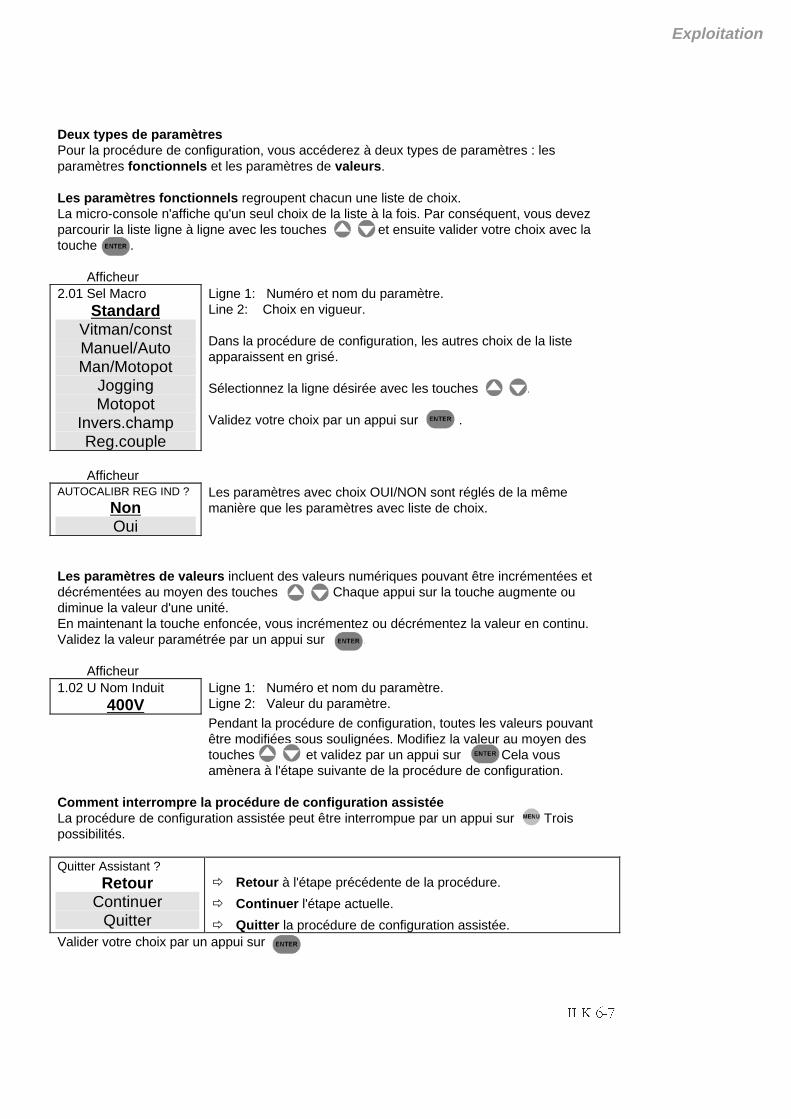
II K 6-7
Exploitation
Deux types de paramètresPour la procédure de configuration, vous accéderez à deux types de paramètres : lesparamètres fonctionnels et les paramètres de valeurs.
Les paramètres fonctionnels regroupent chacun une liste de choix.La micro-console n'affiche qu'un seul choix de la liste à la fois. Par conséquent, vous devezparcourir la liste ligne à ligne avec les touches et ensuite valider votre choix avec latouche .
Afficheur2.01 Sel Macro
StandardVitman/constManuel/AutoMan/Motopot
JoggingMotopot
Invers.champReg.couple
Ligne 1: Numéro et nom du paramètre.Line 2: Choix en vigueur.
Dans la procédure de configuration, les autres choix de la listeapparaissent en grisé.
Sélectionnez la ligne désirée avec les touches .
Validez votre choix par un appui sur .
AfficheurAUTOCALIBR REG IND ?
NonOui
Les paramètres avec choix OUI/NON sont réglés de la mêmemanière que les paramètres avec liste de choix.
Les paramètres de valeurs incluent des valeurs numériques pouvant être incrémentées etdécrémentées au moyen des touches . Chaque appui sur la touche augmente oudiminue la valeur d'une unité.En maintenant la touche enfoncée, vous incrémentez ou décrémentez la valeur en continu.Validez la valeur paramétrée par un appui sur .
Afficheur1.02 U Nom Induit
400VLigne 1: Numéro et nom du paramètre.Ligne 2: Valeur du paramètre.
Pendant la procédure de configuration, toutes les valeurs pouvantêtre modifiées sous soulignées. Modifiez la valeur au moyen destouches et validez par un appui sur . Cela vousamènera à l'étape suivante de la procédure de configuration.
Comment interrompre la procédure de configuration assistéeLa procédure de configuration assistée peut être interrompue par un appui sur . Troispossibilités.
Quitter Assistant ?Retour
ContinuerQuitter
Õ Retour à l'étape précédente de la procédure. Õ Continuer l'étape actuelle. Õ Quitter la procédure de configuration assistée.
Valider votre choix par un appui sur
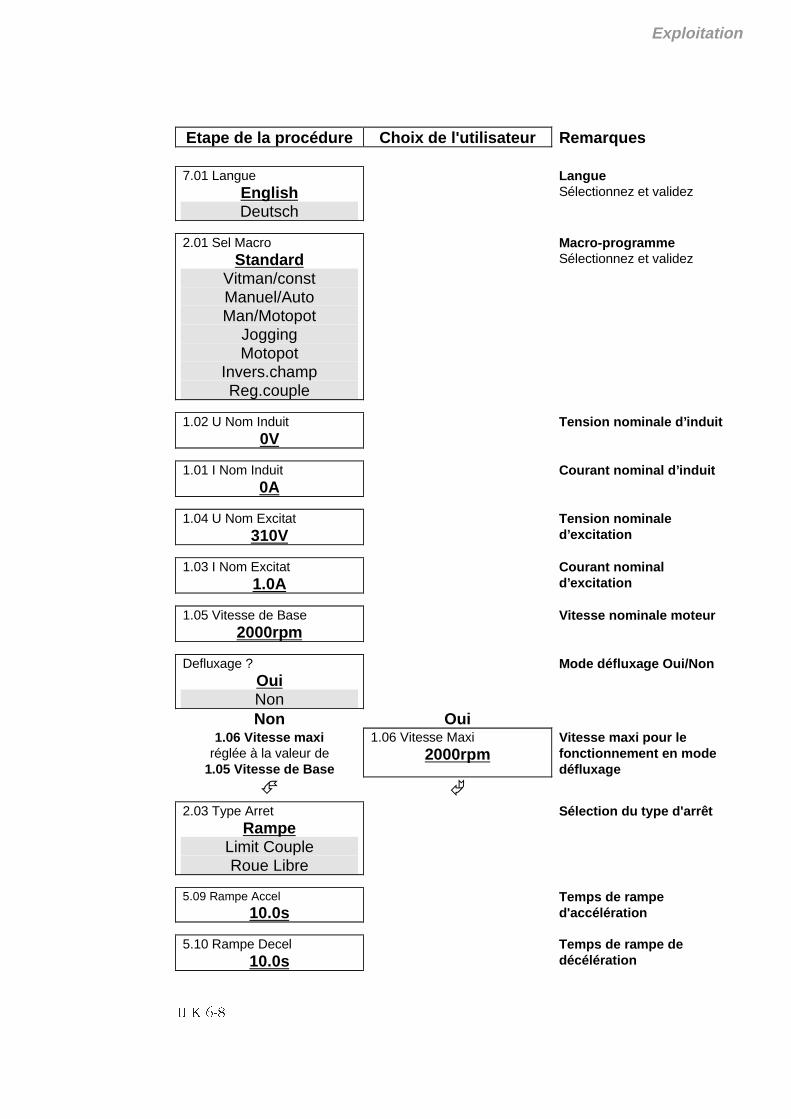
II K 6-8
Exploitation
Etape de la procédure Choix de l'utilisateur Remarques
7.01 LangueEnglish Deutsch
LangueSélectionnez et validez
2.01 Sel MacroStandard
Vitman/constManuel/AutoMan/Motopot
JoggingMotopot
Invers.champReg.couple
Macro-programmeSélectionnez et validez
1.02 U Nom Induit0V
Tension nominale d’induit
1.01 I Nom Induit0A
Courant nominal d’induit
1.04 U Nom Excitat310V
Tension nominaled’excitation
1.03 I Nom Excitat1.0A
Courant nominald’excitation
1.05 Vitesse de Base2000rpm
Vitesse nominale moteur
Defluxage ?Oui Non
Mode défluxage Oui/Non
Non Oui1.06 Vitesse maxi
réglée à la valeur de1.05 Vitesse de Base
1.06 Vitesse Maxi2000rpm
Vitesse maxi pour lefonctionnement en modedéfluxage
® ¨2.03 Type Arret
Rampe Limit CoupleRoue Libre
Sélection du type d'arrêt
5.09 Rampe Accel
10.0s Temps de ramped'accélération
5.10 Rampe Decel10.0s
Temps de rampe dedécélération
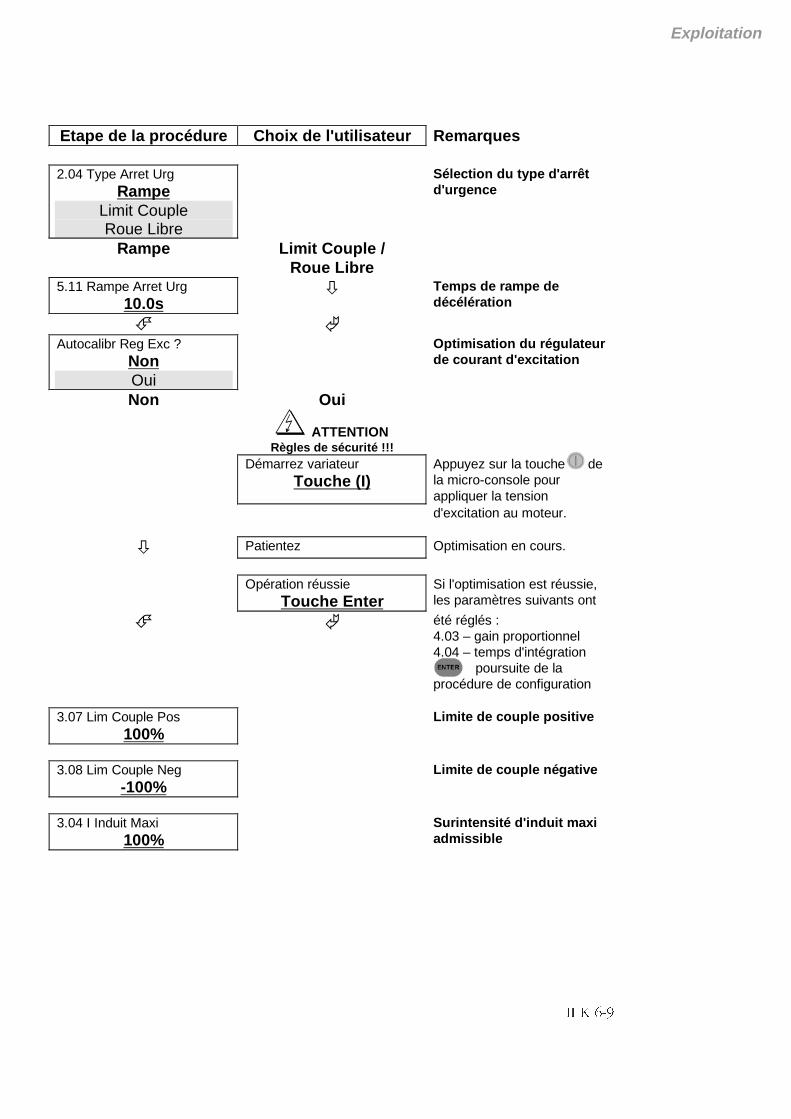
II K 6-9
Exploitation
Etape de la procédure Choix de l'utilisateur Remarques
2.04 Type Arret UrgRampe
Limit CoupleRoue Libre
Sélection du type d'arrêtd'urgence
Rampe Limit Couple /Roue Libre
5.11 Rampe Arret Urg10.0s
× Temps de rampe dedécélération
® ¨Autocalibr Reg Exc ?
NonOui
Optimisation du régulateurde courant d'excitation
Non Oui
ATTENTIONRègles de sécurité !!!
Démarrez variateurTouche (I)
Appuyez sur la touche dela micro-console pourappliquer la tensiond'excitation au moteur.
× Patientez Optimisation en cours.
Opération réussieTouche Enter
Si l'optimisation est réussie,les paramètres suivants ont
® ¨ été réglés :4.03 – gain proportionnel4.04 – temps d'intégration poursuite de laprocédure de configuration
3.07 Lim Couple Pos100%
Limite de couple positive
3.08 Lim Couple Neg-100%
Limite de couple négative
3.04 I Induit Maxi100%
Surintensité d'induit maxiadmissible
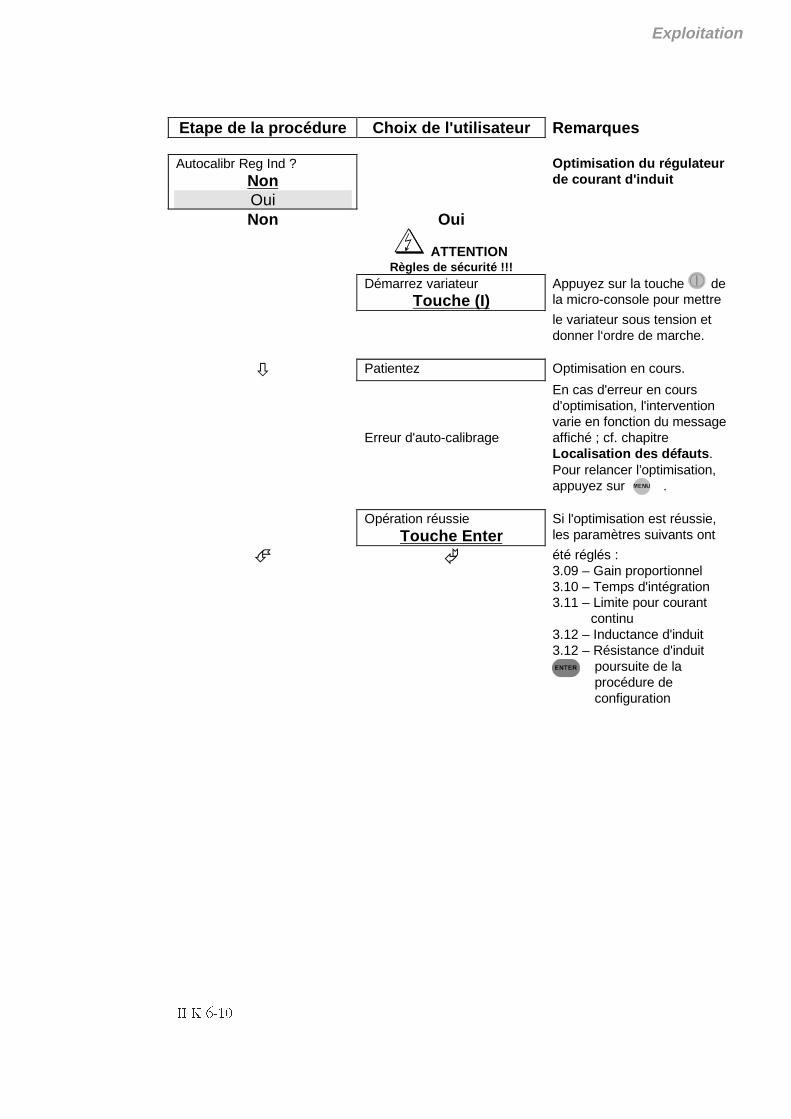
II K 6-10
Exploitation
Etape de la procédure Choix de l'utilisateur Remarques
Autocalibr Reg Ind ?NonOui
Optimisation du régulateurde courant d'induit
Non Oui
ATTENTIONRègles de sécurité !!!
Démarrez variateurTouche (I)
Appuyez sur la touche dela micro-console pour mettre
le variateur sous tension etdonner l‘ordre de marche.
× Patientez Optimisation en cours.
Erreur d'auto-calibrage
En cas d'erreur en coursd'optimisation, l'interventionvarie en fonction du messageaffiché ; cf. chapitreLocalisation des défauts .Pour relancer l’optimisation,appuyez sur .
Opération réussieTouche Enter
Si l'optimisation est réussie,les paramètres suivants ont
® ¨ été réglés :3.09 – Gain proportionnel3.10 – Temps d'intégration3.11 – Limite pour courant continu3.12 – Inductance d'induit3.12 – Résistance d'induit poursuite de la procédure de configuration

II K 6-11
Exploitation
Etape de la procédure Choix de l'utilisateur Remarques
5.02 Mode Mesure VitFEM
Dynamo TachyCodeur
Procédure pour dynamotachymétrique et codeur:
cf. pages suivantes
Mode de mesure de vitesseSélectionnez et validez. Laprocédure varie selon le choixde l'utilisateur (FEM ouDYNAMO TACHY ouCODEUR). Les troispossibilités sont décrites.
FEM
ATTENTIONRègles de sécurité !!!
Démarrez variateurTouche (I)
Appuyez sur la touche de lamicro-console pour mettre le
variateur sous tension etdonner l‘ordre de marche. Lemoteur accélère à 10% de lavitesse maxi !
Sens rotation avantOui Non
S'il est raccordé commepréconisé sur le schéma decâblage, le moteur tournera
dans le sens avant. Validez lesens de rotation par un appuisur .
Oui Non
× Arrêter & CorrigerTouche Menu
Erreur de sens de rotation !Pour la corriger, mettez d'abordle variateur hors tension enappuyant sur . Ensuite,répétez cette étape de laprocédure.
× Quitter assistant ?Retour Quitter
Sélectionnez Quitter. Appuyezsur et corrigez l'erreur.
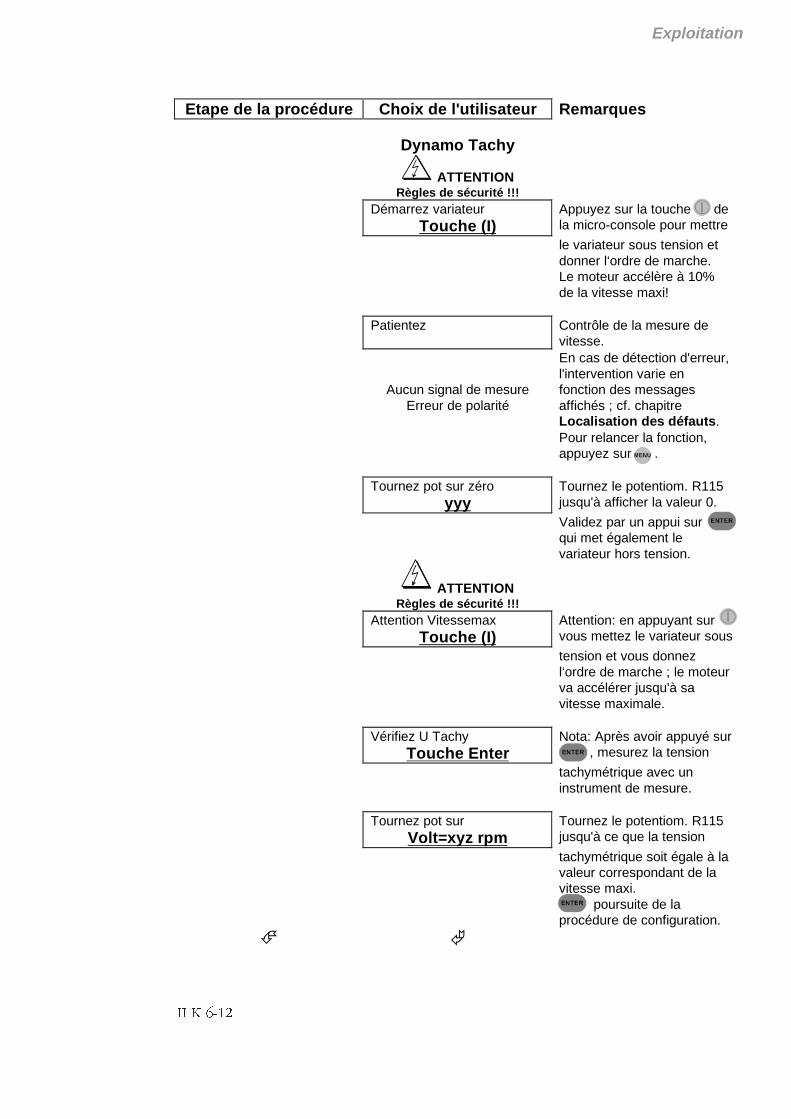
II K 6-12
Exploitation
Etape de la procédure Choix de l'utilisateur Remarques
Dynamo Tachy
ATTENTIONRègles de sécurité !!!
Démarrez variateurTouche (I)
Appuyez sur la touche dela micro-console pour mettre
le variateur sous tension etdonner l‘ordre de marche.Le moteur accélère à 10%de la vitesse maxi!
Patientez Contrôle de la mesure devitesse.
Aucun signal de mesureErreur de polarité
En cas de détection d'erreur,l'intervention varie enfonction des messagesaffichés ; cf. chapitreLocalisation des défauts .Pour relancer la fonction,appuyez sur .
Tournez pot sur zéroyyy
Tournez le potentiom. R115jusqu'à afficher la valeur 0.
Validez par un appui sur ,qui met également levariateur hors tension.
ATTENTIONRègles de sécurité !!!
Attention VitessemaxTouche (I)
Attention: en appuyant survous mettez le variateur sous
tension et vous donnezl‘ordre de marche ; le moteurva accélérer jusqu'à savitesse maximale.
Vérifiez U TachyTouche Enter
Nota: Après avoir appuyé sur , mesurez la tension
tachymétrique avec uninstrument de mesure.
Tournez pot surVolt=xyz rpm
Tournez le potentiom. R115jusqu'à ce que la tension
tachymétrique soit égale à lavaleur correspondant de lavitesse maxi. poursuite de laprocédure de configuration.
® ¨
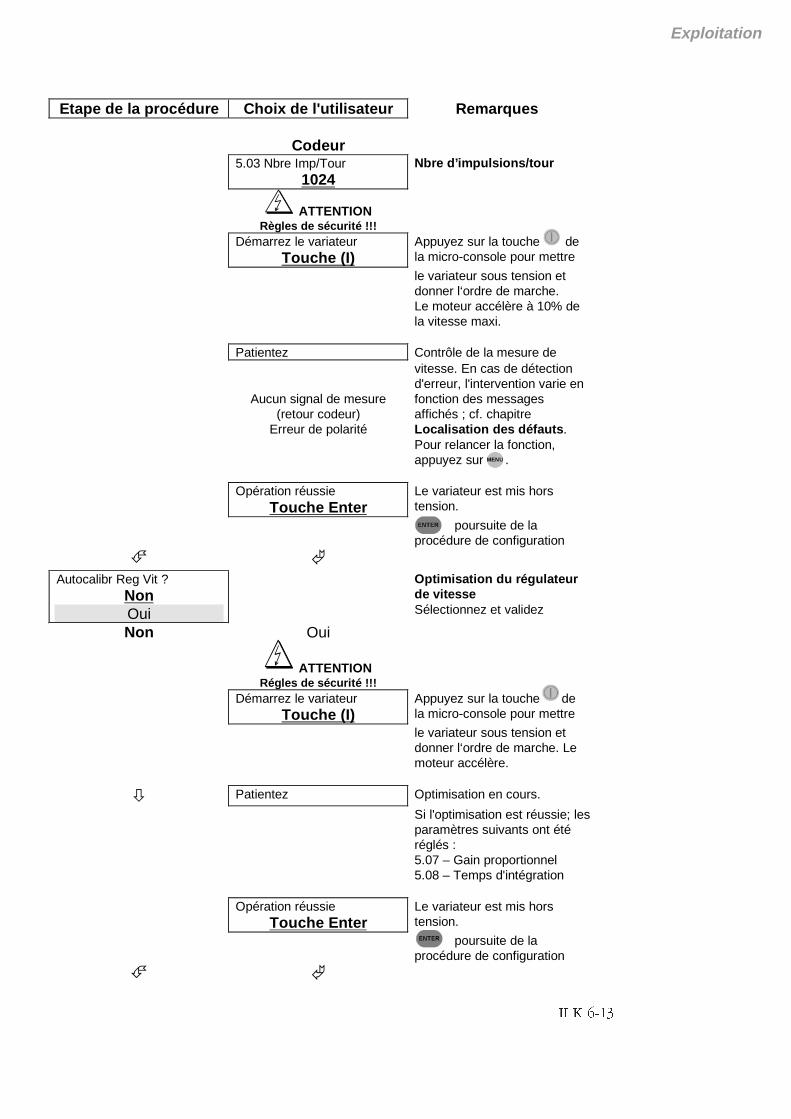
II K 6-13
Exploitation
Etape de la procédure Choix de l'utilisateur Remarques
Codeur5.03 Nbre Imp/Tour
1024Nbre d’impulsions/tour
ATTENTIONRègles de sécurité !!!
Démarrez le variateurTouche (I)
Appuyez sur la touche dela micro-console pour mettre
le variateur sous tension etdonner l‘ordre de marche.Le moteur accélère à 10% dela vitesse maxi.
Patientez Contrôle de la mesure de
Aucun signal de mesure(retour codeur)
Erreur de polarité
vitesse. En cas de détectiond'erreur, l'intervention varie enfonction des messagesaffichés ; cf. chapitreLocalisation des défauts .Pour relancer la fonction,appuyez sur .
Opération réussieTouche Enter
Le variateur est mis horstension.
poursuite de laprocédure de configuration
® ¨Autocalibr Reg Vit ?
NonOui
Optimisation du régulateurde vitesseSélectionnez et validez
Non Oui
ATTENTIONRégles de sécurité !!!
Démarrez le variateurTouche (I)
Appuyez sur la touche dela micro-console pour mettre
le variateur sous tension etdonner l‘ordre de marche. Lemoteur accélère.
× Patientez Optimisation en cours.
Si l'optimisation est réussie; lesparamètres suivants ont étéréglés :5.07 – Gain proportionnel5.08 – Temps d'intégration
Opération réussieTouche Enter
Le variateur est mis horstension.
poursuite de laprocédure de configuration
® ¨
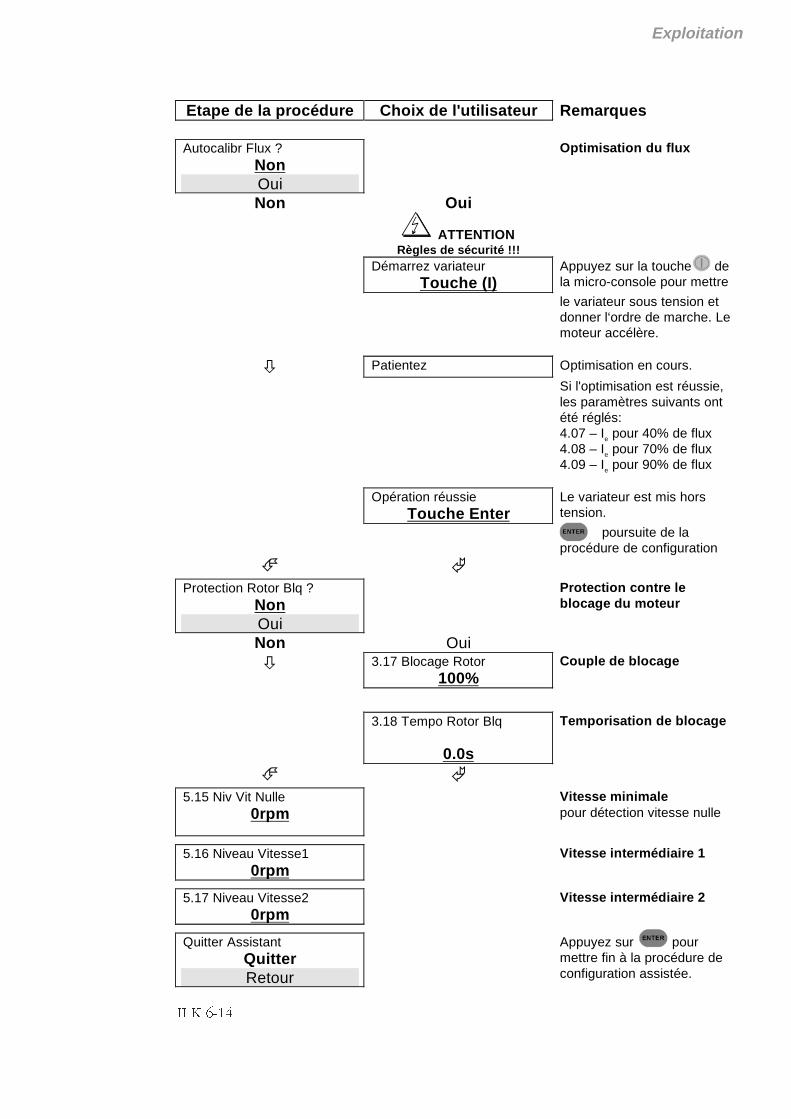
II K 6-14
Exploitation
Etape de la procédure Choix de l'utilisateur Remarques
Autocalibr Flux ?NonOui
Optimisation du flux
Non Oui
ATTENTIONRègles de sécurité !!!
Démarrez variateurTouche (I)
Appuyez sur la touche dela micro-console pour mettre
le variateur sous tension etdonner l‘ordre de marche. Lemoteur accélère.
× Patientez Optimisation en cours.
Si l'optimisation est réussie,les paramètres suivants ontété réglés:4.07 – Ie pour 40% de flux4.08 – Ie pour 70% de flux4.09 – Ie pour 90% de flux
Opération réussieTouche Enter
Le variateur est mis horstension.
poursuite de laprocédure de configuration
® ¨Protection Rotor Blq ?
NonOui
Protection contre leblocage du moteur
Non Oui× 3.17 Blocage Rotor
100%Couple de blocage
3.18 Tempo Rotor Blq
0.0s
Temporisation de blocage
® ¨5.15 Niv Vit Nulle
0rpmVitesse minimalepour détection vitesse nulle
5.16 Niveau Vitesse10rpm
Vitesse intermédiaire 1
5.17 Niveau Vitesse20rpm
Vitesse intermédiaire 2
Quitter AssistantQuitterRetour
Appuyez sur pourmettre fin à la procédure deconfiguration assistée.
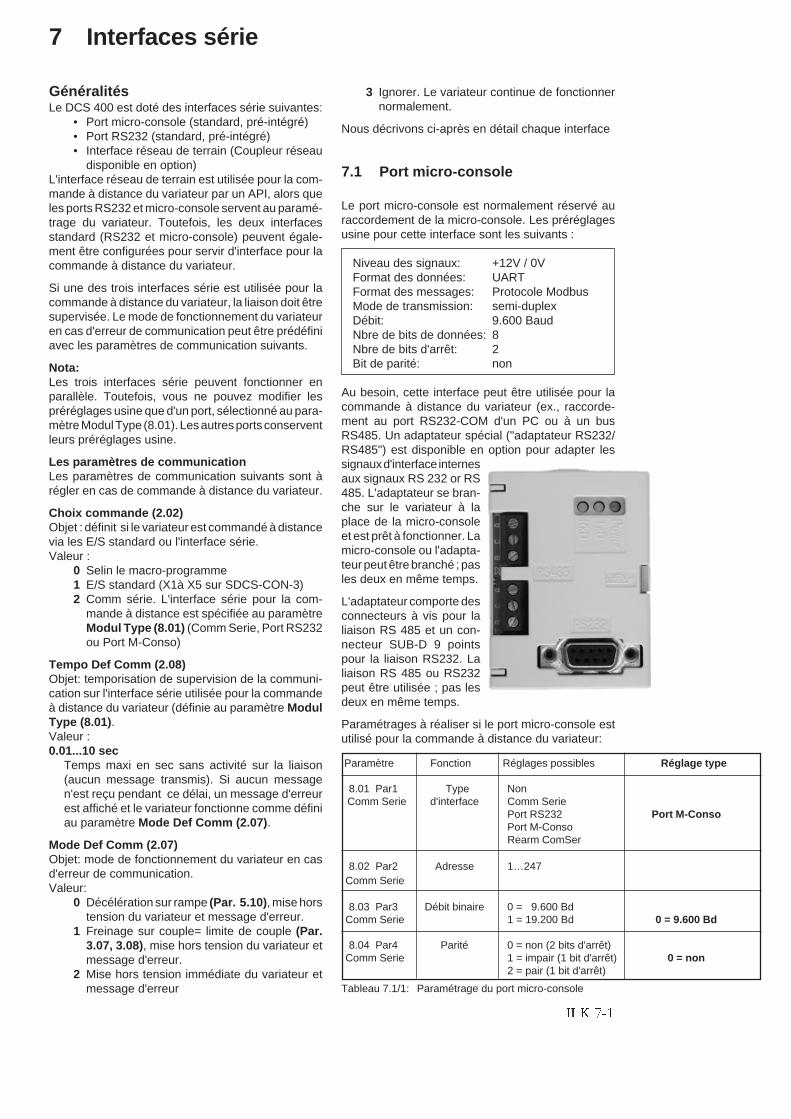
II K 7-1
7 Interfaces série
GénéralitésLe DCS 400 est doté des interfaces série suivantes:
• Port micro-console (standard, pré-intégré)• Port RS232 (standard, pré-intégré)• Interface réseau de terrain (Coupleur réseau
disponible en option)L'interface réseau de terrain est utilisée pour la com-mande à distance du variateur par un API, alors queles ports RS232 et micro-console servent au paramé-trage du variateur. Toutefois, les deux interfacesstandard (RS232 et micro-console) peuvent égale-ment être configurées pour servir d'interface pour lacommande à distance du variateur.
Si une des trois interfaces série est utilisée pour lacommande à distance du variateur, la liaison doit êtresupervisée. Le mode de fonctionnement du variateuren cas d'erreur de communication peut être prédéfiniavec les paramètres de communication suivants.
Nota:Les trois interfaces série peuvent fonctionner enparallèle. Toutefois, vous ne pouvez modifier lespréréglages usine que d'un port, sélectionné au para-mètre Modul Type (8.01). Les autres ports conserventleurs préréglages usine.
Les paramètres de communicationLes paramètres de communication suivants sont àrégler en cas de commande à distance du variateur.
Choix commande (2.02)Objet : définit si le variateur est commandé à distancevia les E/S standard ou l'interface série.Valeur :
0 Selin le macro-programme1 E/S standard (X1à X5 sur SDCS-CON-3)2 Comm série. L'interface série pour la com-
mande à distance est spécifiée au paramètreModul Type (8.01) (Comm Serie, Port RS232ou Port M-Conso)
Tempo Def Comm (2.08)Objet: temporisation de supervision de la communi-cation sur l'interface série utilisée pour la commandeà distance du variateur (définie au paramètre ModulType (8.01) .Valeur :0.01...10 sec
Temps maxi en sec sans activité sur la liaison(aucun message transmis). Si aucun messagen'est reçu pendant ce délai, un message d'erreurest affiché et le variateur fonctionne comme définiau paramètre Mode Def Comm (2.07) .
Mode Def Comm (2.07)Objet: mode de fonctionnement du variateur en casd'erreur de communication.Valeur:
0 Décélération sur rampe (Par. 5.10), mise horstension du variateur et message d'erreur.
1 Freinage sur couple= limite de couple (Par.3.07, 3.08), mise hors tension du variateur etmessage d'erreur.
2 Mise hors tension immédiate du variateur etmessage d'erreur
7.1 Port micro-console
Le port micro-console est normalement réservé auraccordement de la micro-console. Les préréglagesusine pour cette interface sont les suivants :
Niveau des signaux: +12V / 0VFormat des données: UARTFormat des messages: Protocole ModbusMode de transmission: semi-duplexDébit: 9.600 BaudNbre de bits de données: 8Nbre de bits d'arrêt: 2Bit de parité: non
Au besoin, cette interface peut être utilisée pour lacommande à distance du variateur (ex., raccorde-ment au port RS232-COM d'un PC ou à un busRS485. Un adaptateur spécial ("adaptateur RS232/RS485") est disponible en option pour adapter lessignaux d'interface internesaux signaux RS 232 or RS485. L'adaptateur se bran-che sur le variateur à laplace de la micro-consoleet est prêt à fonctionner. Lamicro-console ou l'adapta-teur peut être branché ; pasles deux en même temps.
L'adaptateur comporte desconnecteurs à vis pour laliaison RS 485 et un con-necteur SUB-D 9 pointspour la liaison RS232. Laliaison RS 485 ou RS232peut être utilisée ; pas lesdeux en même temps.
Paramétrages à réaliser si le port micro-console estutilisé pour la commande à distance du variateur:
Paramètre Fonction Réglages possibles Réglage type
8.01 Par1 Type Non Comm Serie d'interface Comm Serie
Port RS232 Port M-ConsoPort M-ConsoRearm ComSer
8.02 Par2 Adresse 1…247 Comm Serie
8.03 Par3 Débit binaire 0 = 9.600 Bd Comm Serie 1 = 19.200 Bd 0 = 9.600 Bd
8.04 Par4 Parité 0 = non (2 bits d'arrêt) Comm Serie 1 = impair (1 bit d'arrêt) 0 = non
2 = pair (1 bit d'arrêt)
Tableau 7.1/1: Paramétrage du port micro-console
3 Ignorer. Le variateur continue de fonctionnernormalement.
Nous décrivons ci-après en détail chaque interface
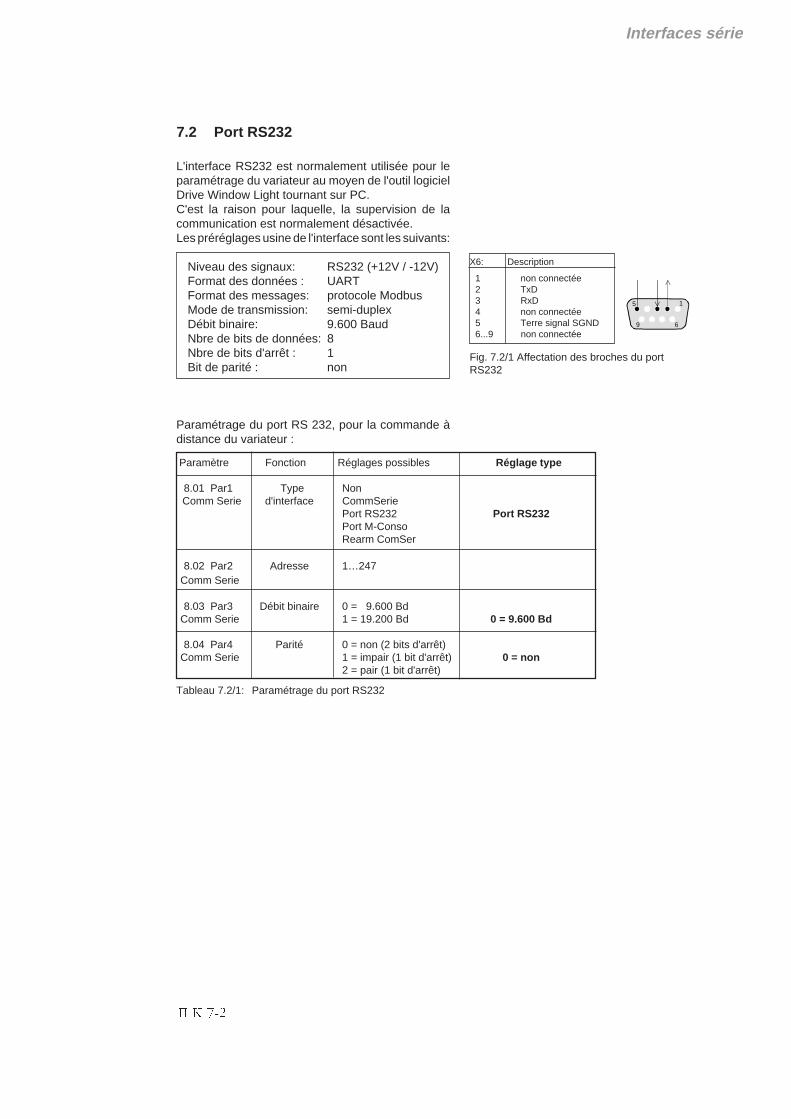
II K 7-2
7.2 Port RS232
L'interface RS232 est normalement utilisée pour leparamétrage du variateur au moyen de l'outil logicielDrive Window Light tournant sur PC.C'est la raison pour laquelle, la supervision de lacommunication est normalement désactivée.Les préréglages usine de l'interface sont les suivants:
Niveau des signaux: RS232 (+12V / -12V)Format des données : UARTFormat des messages: protocole ModbusMode de transmission: semi-duplexDébit binaire: 9.600 BaudNbre de bits de données: 8Nbre de bits d'arrêt : 1Bit de parité : non
Paramétrage du port RS 232, pour la commande àdistance du variateur :
Interfaces série
Tableau 7.2/1: Paramétrage du port RS232
1
9
5
6
X6: Description
1 non connectée2 TxD3 RxD4 non connectée5 Terre signal SGND6...9 non connectée
Fig. 7.2/1 Affectation des broches du portRS232
Paramètre Fonction Réglages possibles Réglage type
8.01 Par1 Type Non Comm Serie d'interface CommSerie
Port RS232 Port RS232Port M-ConsoRearm ComSer
8.02 Par2 Adresse 1…247 Comm Serie
8.03 Par3 Débit binaire 0 = 9.600 Bd Comm Serie 1 = 19.200 Bd 0 = 9.600 Bd
8.04 Par4 Parité 0 = non (2 bits d'arrêt) Comm Serie 1 = impair (1 bit d'arrêt) 0 = non
2 = pair (1 bit d'arrêt)
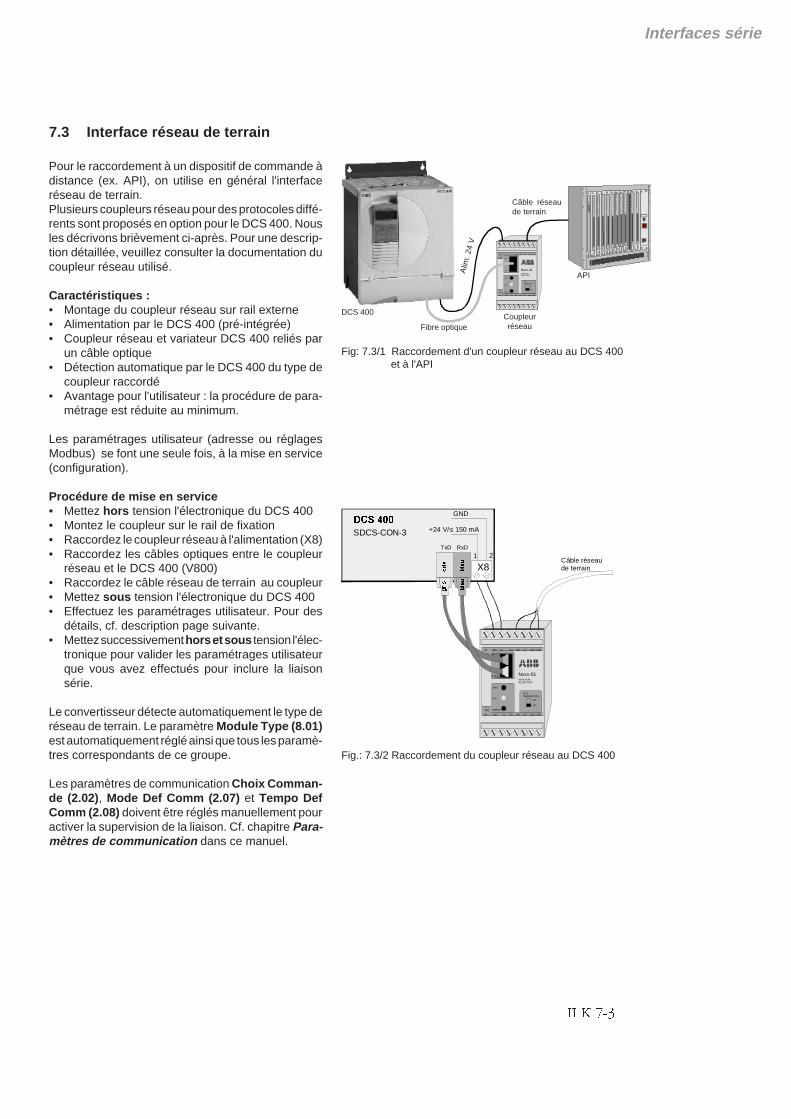
II K 7-3
7.3 Interface réseau de terrain
Pour le raccordement à un dispositif de commande àdistance (ex. API), on utilise en général l'interfaceréseau de terrain.Plusieurs coupleurs réseau pour des protocoles diffé-rents sont proposés en option pour le DCS 400. Nousles décrivons brièvement ci-après. Pour une descrip-tion détaillée, veuillez consulter la documentation ducoupleur réseau utilisé.
Caractéristiques :• Montage du coupleur réseau sur rail externe• Alimentation par le DCS 400 (pré-intégrée)• Coupleur réseau et variateur DCS 400 reliés par
un câble optique• Détection automatique par le DCS 400 du type de
coupleur raccordé• Avantage pour l'utilisateur : la procédure de para-
métrage est réduite au minimum.
Les paramétrages utilisateur (adresse ou réglagesModbus) se font une seule fois, à la mise en service(configuration).
Procédure de mise en service• Mettez hors tension l'électronique du DCS 400• Montez le coupleur sur le rail de fixation• Raccordez le coupleur réseau à l'alimentation (X8)• Raccordez les câbles optiques entre le coupleur
réseau et le DCS 400 (V800)• Raccordez le câble réseau de terrain au coupleur• Mettez sous tension l'électronique du DCS 400• Effectuez les paramétrages utilisateur. Pour des
détails, cf. description page suivante.• Mettez successivement hors et sous tension l'élec-
tronique pour valider les paramétrages utilisateurque vous avez effectués pour inclure la liaisonsérie.
Le convertisseur détecte automatiquement le type deréseau de terrain. Le paramètre Module Type (8.01)est automatiquement réglé ainsi que tous les paramè-tres correspondants de ce groupe.
Les paramètres de communication Choix Comman-de (2.02), Mode Def Comm (2.07) et Tempo DefComm (2.08) doivent être réglés manuellement pouractiver la supervision de la liaison. Cf. chapitre Para-mètres de communication dans ce manuel.
Interfaces série
Nxxx-01xxxxxxxxADAPTER
BUSTERMINATI ON
ON
OFF
RXD
TXD
PE SHF DG D(N) D(P)
X1
X2
PE SHF DG D(N) D(P)SH
XMIT
REC
ERRO R
+24V 0V SH
Fig: 7.3/1 Raccordement d'un coupleur réseau au DCS 400 et à l'API
Fibre optique
Alim
. 24
V
Câble réseaude terrain
DCS 400
API
Coupleurréseau
Fig.: 7.3/2 Raccordement du coupleur réseau au DCS 400
SDCS-CON-3
GND
+24 V/≤ 150 mA
Nxxx-01xx xxxx xxADAPTER
BUSTERMINATION
ON
OFF
RXD
TXD
PE SHF DG D(N) D(P)
X1
X2
PE SHF DG D(N) D(P)SH
XMIT
REC
ERROR
+24V 0V SH
+24V 0V
'&6
1 2
X8
RxDTxD
EOHX
EOHX
JULV
JULV
Câble réseau de terrain

II K 7-4
Présentation des paramètres des réseaux de ter-rain les plus utilisés
Pour une description détaillée, cf. manuel du coupleurréseau correspondant.
Profibus (avec transfert des paramètres)Paramètre Nom Choix Préréglage usine
8.01 Module Type Self-maintained entry NPBA SW2 x.y8.02 Profibus Mode 0 = FMS
1 = PPO1 (DS1…2+Par)2 = PPO2 (DS1…4+Par)3 = PPO3 (DS1…2)4 = PPO4 (DS1…4)
1 = PPO1
8.03 Station Number 2…126 28.04 Baudrate 0 = 9,6 kBd
1 = 19,2 kBd2 = 93,75 kBd3 = 187,5 kBd4 = 500 kBd5 = 1,5 MBd6 = Auto
6 = Auto
8.05 Number of Data Set Pairs 1 = if 8.02 = 1 oder 32 = if 8.02 = 2 oder 4
1 (8.02 = 1)
8.06 Data Set Offset 0…255 0 = no Offset8.07 Cut Off Timeout 0…255 (20ms Raster)
between NPBA-02 andMaster
30 = 600ms
8.08 Comm Profile 0 = ABB DRIVES1 = CSA 2.8/3.0
0 = ABB DRIVES
Modbus (avec transfert des paramètres)Paramètre Nom Choix Préréglage usine
8.01 Module Type Self-maintained entry NMBA SW x.y8.02 Modbus Mode 0 = RTU wdg:flt
1 = RTU wdg:rst0 = RTU wdg:flt
8.03 Station Number 1…247 18.04 Baudrate 0 = 1.200 Bd
1 = 2.400 Bd2 = 4.800 Bd3 = 9.600 Bd4 = 19.200 Bd
3 = 9.600 Bd
8.05 Parity 0 = even1 = odd2 = none
2 = ohne
CS31 (sans transfert des paramètres)Paramètre Nom Choix Préréglage usine
8.01 Module Type Self-maintained entry NCSA SW x.y8.02 Protocol 1 1 = ABB CS318.03 Modul ID 0 = Word
1 = Binary0 = Word
8.04 Station Number 0… 5 (Word Mode)0…57 (Binary Mode)
1
8.05 Addr Index 0 = lower1 = upper
0 = lower
8.06 Data Sets 1…3 18.07 Data Set 1 Const 1…32767 (1=6ms) 18.08 Data Set 2 Const 1…32767 (1=6ms) 18.09 Data Set 3 Const 1…32767 (1=6ms) 18.10 Data Set Offset 1…255 1
Pour le paramétrage avec la micro-console, vousdevez d'abord activer la liste complète des paramè-tres (fonction Menu Complet/Court dans MENU)pour accéder à ces paramètres. Poursuivez avec leréglage des paramètres utilisateur (en gras ).
Interfaces série
Tableau 7.3/1: Paramétrages pour les coupleurs réseau les plus utilisés.

Annexes
Annexe A - Accessoires
II K A-1
Type de DCS Type de Fig.500V self
Convertisseur 2 quadrantsDCS401.0020 ND01 1DCS401.0045 ND02 1DCS401.0065 ND04 1DCS401.0090 ND05 1DCS401.0125 ND06 1DCS401.0180 ND07 2DCS401.0230 ND07 2DCS401.0315 ND09 2DCS401.0405 ND10 2DCS401.0500 ND10 2DCS401.0610 ND12 2DCS401.0740 ND12 2
Convertisseur 4 quadrantsDCS402.0025 ND01 1DCS402.0050 ND02 1DCS402.0075 ND04 1DCS402.0100 ND05 1DCS402.0140 ND06 1DCS402.0200 ND07 2DCS402.0260 ND07 2DCS402.0350 ND09 2DCS402.0450 ND10 2DCS402.0550 ND10 2DCS402.0680 ND12 2DCS402.0820 ND13 3
Selfs réseau L1
Fig. 1
Tableau A/1: Selfs réseau
Fig. 3Fig. 2
Annexe A
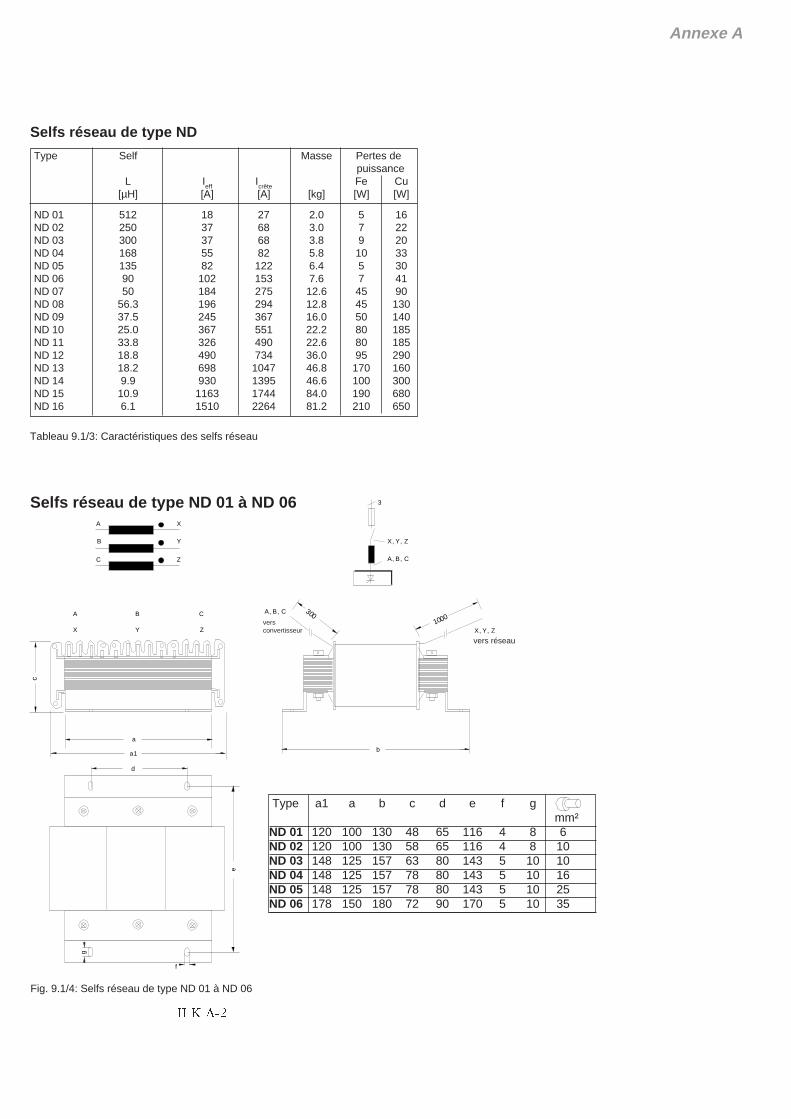
A, B, C 3001000
X, Y, Z
b
a
a1
c
A
X
B
Y
C
Z
A
B
C
X
Y
Z
3
A, B, C
X, Y, Z
d
e
g
f
II K A-2
Annexe A
Type Self Masse Pertes depuissance
L Ieff
Icrête
Fe Cu[µH] [A] [A] [kg] [W] [W]
ND 01 512 18 27 2.0 5 16ND 02 250 37 68 3.0 7 22ND 03 300 37 68 3.8 9 20ND 04 168 55 82 5.8 10 33ND 05 135 82 122 6.4 5 30ND 06 90 102 153 7.6 7 41ND 07 50 184 275 12.6 45 90ND 08 56.3 196 294 12.8 45 130ND 09 37.5 245 367 16.0 50 140ND 10 25.0 367 551 22.2 80 185ND 11 33.8 326 490 22.6 80 185ND 12 18.8 490 734 36.0 95 290ND 13 18.2 698 1047 46.8 170 160ND 14 9.9 930 1395 46.6 100 300ND 15 10.9 1163 1744 84.0 190 680ND 16 6.1 1510 2264 81.2 210 650
Selfs réseau de type ND
Tableau 9.1/3: Caractéristiques des selfs réseau
Type a1 a b c d e f gmm²
ND 01 120 100 130 48 65 116 4 8 6ND 02 120 100 130 58 65 116 4 8 10ND 03 148 125 157 63 80 143 5 10 10ND 04 148 125 157 78 80 143 5 10 16ND 05 148 125 157 78 80 143 5 10 25ND 06 178 150 180 72 90 170 5 10 35
Selfs réseau de type ND 01 à ND 06
vers réseau
versconvertisseur
Fig. 9.1/4: Selfs réseau de type ND 01 à ND 06

II K A-3
Annexe A
Type A B C D E F G H I KND 07, 08 285 230 86 115 253 176 65 80 9x17 385ND 09 327 290 99 120 292 224 63 100 11x21 423ND 10, 11 408 290 99 120 373 224 63 100 11x21 504ND 12 458 290 120 145 423 224 63 100 11x21 554
Selfs réseau de type ND 07 à ND 12
Selfs réseau de type ND 15, 16Selfs réseau de type ND 13, 14
Fig. 9.1/5: Selfs réseau de type ND 07 à ND 12
Fig. 9.1/6: Selfs réseau de type ND 13, ND 14 Fig. 9.1/7: Selfs réseau de type ND 15, ND 16
C ±1
Max D
B ±1
F ±0.3
H ±2
15
7
3AST 478223 D5
3AFE 100146030.0188 mH
490 A
I max 734 A
15K
I (6x
)
G ±
4A
±2
E ±
2
A-A
E±2
10
±0.3F
A
A
min
i 30
Ø s
ans
vern
isco
nduc
tion
sur p
laqu
e de
fixa
tion
A A
A-A
20x1
4(3x
)
ø13
(3x)
100
±2140
45 45
±415
4±2
342
±2150 40
50
±2115
10
±1290
100
30
±0.3
224
min
i 30
Ø s
ans
vern
isco
nduc
tion
sur p
laqu
e de
fixa
tion
(6x)
10x
18
±2151
45
90
±517
6±2
440
±2182
147
10
48
15
80
40(1
2x)
ø13
30140
±1390
±0.3316
14030
20
100
10
A A
A-A
147 10
±0.3
316
min
i 30
Ø s
ans
vern
is c
ondu
ctio
nsu
r pl
aque
de
fixat
ion

Type de convertisseur Fabrication/ Modèle Porte-fusibles
Convertisseur 2 quadrants
DCS401.0020 Bussman 170M 1564 OFAX 00 S3LDCS401.0045 Bussman 170M 1566 OFAX 00 S3LDCS401.0065 Bussman 170M 1566 OFAX 00 S3LDCS401.0090 Bussman 170M 1568 OFAX 00 S3LDCS401.0125 Bussman 170M 3815 OFAX 1 S3DCS401.0180 Bussman 170M 3815 OFAX 1 S3DCS401.0230 Bussman 170M 3819 OFAX 1 S3DCS401.0315 Bussman 170M 6811 OFAS B 3DCS401.0405 Bussman 170M 6811 OFAS B 3DCS401.0500 Bussman 170M 6811 OFAS B 3DCS401.0610 Bussman 170M 6813 OFAS B 3DCS401.0740 Bussman 170M 6813 OFAS B 3 Convertisseur 4 quadrantsDCS402.0025 Bussman 170M 1564 OFAX 00 S3LDCS402.0050 Bussman 170M 1566 OFAX 00 S3LDCS402.0075 Bussman 170M 1566 OFAX 00 S3LDCS402.0100 Bussman 170M 1568 OFAX 00 S3LDCS402.0140 Bussman 170M 3815 OFAX 1 S3DCS402.0200 Bussman 170M 3815 OFAX 1 S3DCS402.0260 Bussman 170M 5810 OFAX 2 S3DCS402.0350 Bussman 170M 6811 OFAS B 3DCS402.0450 Bussman 170M 6811 OFAS B 3DCS402.0550 Bussman 170M 6811 OFAS B 3DCS402.0680 Bussman 170M 6813 OFAS B 3DCS402.0820 Bussman 170M 6813 OFAS B 3
Tableau A/2: Fusibles et porte-fusibles
Fusibles et porte-fusibles pourl'alimentation du circuit d'induit
Les fusibles UR sont des fusibles à couteaux dont lesréférences figurent dans le tableau ci-dessous. Cesfusibles imposent l'utilisation de porte-fusibles spé-ciaux. Des porte-fusibles de types OFAX et OFASsont disponibles.
II K A-4
Annexe A

Fabrication/ Modèle Résistance [m W] Fusible F1 Taille Porte-fusibles Longueur [mm]
Bussman 170M 1564 6 50A 660V UR 0 OFAX 00 S3L 78,5Bussman 170M 1566 3 80A 660V UR 0 OFAX 00 S3L 78,5Bussman 170M 1568 1,,8 125A 660V UR 0 OFAX 00 S3L 78,5Bussman 170M 3815 0,,87 200A 660V UR 1 OFAX 1 S3 135Bussman 170M 3819 0,,37 400A 660V UR 1 OFAX 1 S3 135Bussman 170M 5810 0,,3 500A 660V UR 2 OFAX 2 S3 150Bussman 170M 6811 0,,22 700A 660V UR 3 OFAS B 3 150Bussman 170M 6813 0,,15 900A 660V UR 3 OFAS B 3 150
Tableau 9.1/1: Fusibles et porte-fusibles
Dimensions des porte-fusibles
Porte-fusibles HxWxD[mm]
OFAX 00 S3L 148x112x111OFAX 1 S3 250x174x123OFAX 2 S3 250x214x133OFAS B 3 250x246x136
Tableau 9.1/2: Porte-fusibles
Fig. 9.1/2: Porte-fusibles OFAX ... Fig. 9.1/3: Porte-fusibles OFAS B 3
Dimensions [mm] Tailles 0 à 3
Taille a b c d e0 78,5 50 35 20,5 151 135 69 45 45 202 150 69 55 55 263 150 68 76 76 33
Nota :Dans certains cas, les dimensionsréelles peuvent être supérieures.Ces valeurs ne sont données qu'à ti-tre indicatif.
Fig. 9.1/1: Fusibles tailles 0 à 3
L1 L2 L3
F1
a
d e
2
10
c
6
b
Indicator
OFASB 3
W D
H
W D
H
II K A-5
Annexe A
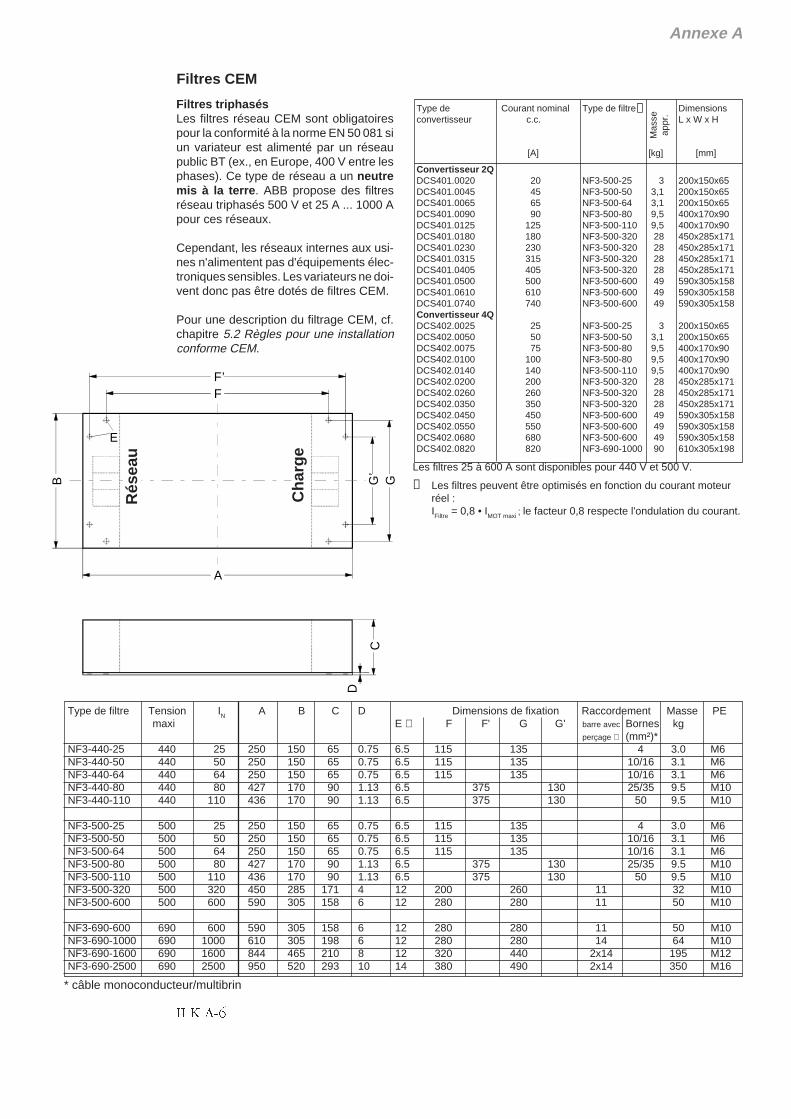
Filtres CEM
II K A-6
Type de filtre Tension IN A B C D Dimensions de fixation Raccordement Masse PEmaxi E ∅ F F' G G' barre avec Bornes kg
perçage ∅ (mm²)*NF3-440-25 440 25 250 150 65 0.75 6.5 115 135 4 3.0 M6NF3-440-50 440 50 250 150 65 0.75 6.5 115 135 10/16 3.1 M6NF3-440-64 440 64 250 150 65 0.75 6.5 115 135 10/16 3.1 M6NF3-440-80 440 80 427 170 90 1.13 6.5 375 130 25/35 9.5 M10NF3-440-110 440 110 436 170 90 1.13 6.5 375 130 50 9.5 M10
NF3-500-25 500 25 250 150 65 0.75 6.5 115 135 4 3.0 M6NF3-500-50 500 50 250 150 65 0.75 6.5 115 135 10/16 3.1 M6NF3-500-64 500 64 250 150 65 0.75 6.5 115 135 10/16 3.1 M6NF3-500-80 500 80 427 170 90 1.13 6.5 375 130 25/35 9.5 M10NF3-500-110 500 110 436 170 90 1.13 6.5 375 130 50 9.5 M10NF3-500-320 500 320 450 285 171 4 12 200 260 11 32 M10NF3-500-600 500 600 590 305 158 6 12 280 280 11 50 M10
NF3-690-600 690 600 590 305 158 6 12 280 280 11 50 M10NF3-690-1000 690 1000 610 305 198 6 12 280 280 14 64 M10NF3-690-1600 690 1600 844 465 210 8 12 320 440 2x14 195 M12NF3-690-2500 690 2500 950 520 293 10 14 380 490 2x14 350 M16
* câble monoconducteur/multibrin
Annexe A
Filtres triphasésLes filtres réseau CEM sont obligatoirespour la conformité à la norme EN 50 081 siun variateur est alimenté par un réseaupublic BT (ex., en Europe, 400 V entre lesphases). Ce type de réseau a un neutremis à la terre . ABB propose des filtresréseau triphasés 500 V et 25 A ... 1000 Apour ces réseaux.
Cependant, les réseaux internes aux usi-nes n'alimentent pas d'équipements élec-troniques sensibles. Les variateurs ne doi-vent donc pas être dotés de filtres CEM.
Pour une description du filtrage CEM, cf.chapitre 5.2 Règles pour une installationconforme CEM.
Type de Courant nominal Type de filtre Dimensionsconvertisseur c.c. L x W x H
[A] [kg] [mm]
Convertisseur 2QDCS401.0020 20 NF3-500-25 3 200x150x65DCS401.0045 45 NF3-500-50 3,1 200x150x65DCS401.0065 65 NF3-500-64 3,1 200x150x65DCS401.0090 90 NF3-500-80 9,5 400x170x90DCS401.0125 125 NF3-500-110 9,5 400x170x90DCS401.0180 180 NF3-500-320 28 450x285x171DCS401.0230 230 NF3-500-320 28 450x285x171DCS401.0315 315 NF3-500-320 28 450x285x171DCS401.0405 405 NF3-500-320 28 450x285x171DCS401.0500 500 NF3-500-600 49 590x305x158DCS401.0610 610 NF3-500-600 49 590x305x158DCS401.0740 740 NF3-500-600 49 590x305x158Convertisseur 4QDCS402.0025 25 NF3-500-25 3 200x150x65DCS402.0050 50 NF3-500-50 3,1 200x150x65DCS402.0075 75 NF3-500-80 9,5 400x170x90DCS402.0100 100 NF3-500-80 9,5 400x170x90DCS402.0140 140 NF3-500-110 9,5 400x170x90DCS402.0200 200 NF3-500-320 28 450x285x171DCS402.0260 260 NF3-500-320 28 450x285x171DCS402.0350 350 NF3-500-320 28 450x285x171DCS402.0450 450 NF3-500-600 49 590x305x158DCS402.0550 550 NF3-500-600 49 590x305x158DCS402.0680 680 NF3-500-600 49 590x305x158DCS402.0820 820 NF3-690-1000 90 610x305x198
Les filtres 25 à 600 A sont disponibles pour 440 V et 500 V.
➊ Les filtres peuvent être optimisés en fonction du courant moteurréel :IFiltre = 0,8 • IMOT maxi ; le facteur 0,8 respecte l'ondulation du courant.
➊
Mas
seap
pr.
Line
Load
A
B
F’F
G’
G
E
C
D
Rés
eau
Cha
rge

II K B-1
Annexe B - Déclaration CE de conformité
en p
répa
ratio
n

II K C-1
Annexe C - Mini-guide d'installation et de mise en service
Ava
nt d
e pr
océd
er à
l’in
stal
latio
n, v
érifi
ez le
s él
émen
ts s
uiva
nts:
CO
NT
EN
U D
E L
’EM
BA
LLA
GE
: D
CS
400
, man
uel,
gaba
rit d
e m
onta
ge, m
ini-g
uide
d’in
stal
latio
n et
de
mis
e en
ser
vice
AD
EQ
UA
TIO
N D
U S
ITE
D’IN
ST
ALL
AT
ION
: cf
. man
uel
OU
TIL
LAG
E N
EC
ES
SA
IRE
: to
urne
vis,
clé
dyn
amom
étriq
ueV
ALE
UR
S D
E L
A P
LAQ
UE
SIG
NA
LET
IQU
E :
inte
nsité
nom
inal
e d’
indu
it, te
nsio
n no
min
ale
d’in
duit,
inte
nsité
nom
inal
e d’
exci
tatio
n, te
nsio
n no
min
ale
d’ex
cita
tion,
vite
sse
de b
ase.
Not
a !
Ce
min
i-gui
de d
écrit
uni
quem
ent l
es p
aram
étra
ges
de b
ase
pour
un
mot
eur
en r
égul
atio
n F
EM
.
ST
OP
!V
ER
IFIE
Z Q
UE
L’A
LIM
EN
TA
TIO
N R
ES
EA
U E
ST
SE
CT
ION
NE
E.
VE
RIF
IEZ
L’A
DE
QU
AT
ION
DE
L’A
SS
OC
IAT
ION
MO
TE
UR
/DC
S 4
00.
Le g
abar
it po
ur le
mon
tage
mur
al d
u va
riate
urse
trou
ve s
ur le
des
sus
du c
arto
n d’
emba
llage
.D
étac
hez-
le d
u ca
rton
.
Le D
CS
400
DO
IT ê
tre
mon
té à
la v
ertic
ale
sur
une
surf
ace
lisse
et s
olid
e, p
roté
gée
de la
chal
eur,
de
l’hum
idité
et d
e la
con
dens
atio
n.R
espe
ctez
les
dist
ance
s de
dég
agem
ent
min
imal
es.
En
bas:
20
à 14
0A –
100
mm
180
à 82
0A –
150
mm
En
haut
: 20
à 1
40A
– 1
50m
m18
0 à
820A
– 2
50m
m
S
ur le
s cô
tés:
20
à 2
60A
–
5mm
315
à 82
0A –
10m
m
1
Pla
cez
le D
CS
400
sur
les
vis
et s
erre
z à
fond
les
4vi
s.
Not
a:
Sou
leve
z le
DC
S 4
00 p
ar le
cof
fret
, jam
ais
par
le c
apot
.
2
EN
TE
RM
EN
U
RE
SE
T
LOC
RE
MCap
ot
ChâssisE
NT
ER
MENU
RE
SE
TLO
C
RE
M
X8
110
23
45
67
89
12
34
56
78
12
34
51
23
45
67
89
12
12
34
X98
X2
X3
X4
X5
TxD
RxD
X10
12
12
34
X1
Dan
ger
! S
afet
y in
stru
ctio
nsm
ust b
e fo
llow
ed
SD
CS
-CO
N-3
C1
U1
V1
W1
D1
X8
110
23
45
67
89
12
34
56
78
12
34
51
23
45
67
89
12
12
34
X98
X2
Ana
logu
e In
/Out
X3
Enc
oder
X4
Dig
ital I
nX
5 D
igita
l Out
TxD
RxD
X10
12
12
34
X1
Tac
ho
Ele
ctr.
sup
ply
115.
..230
V ~
Dan
ger
! S
afet
y in
stru
ctio
nsm
ust b
e fo
llow
ed
SD
CS
-CO
N-3
Pow
er p
art
20...
550A
C1
U1
V1
W1
D1
EN
TE
RME
NU
RE
SE
TLO
C
RE
M
115/
230V
~F
an
M23
0...5
00V
~
OFF
ST
OP
!V
ER
IFIE
Z L
’ISO
LEM
EN
T D
U M
OT
EU
R, D
ES
CA
BLE
S M
OT
EU
R E
TR
ES
EA
U
RA
CC
OR
DE
ME
NT
MO
TE
UR
ET
RE
SE
AU
-R
acco
rdez
le c
âble
d’in
duit
mot
eur
sur
les
born
es C
1 et
D1.
-R
acco
rdez
le c
âble
d’e
xcita
tion
mot
eur
sur
les
born
es X
10:1
/ 2.
-R
acco
rdez
le c
âble
rés
eau
sur
les
born
esU
1 V
1 W
1.-
Rac
cord
ez l’
alim
enta
tion
de l’
élec
tron
ique
sur
les
born
es X
98:3
/ 4.
-R
acco
rdez
l’al
imen
tatio
n du
ven
tilat
eur
sur
leha
ut d
u D
CS
400
.
4
3
RA
CC
OR
DE
ME
NT
AU
X E
/S A
NA
LOG
IQU
ES
ET
LO
GIQ
UE
S
5
Le D
CS
400
n’in
tègr
e au
cun
fusi
ble.
NO
TA
!V
érifi
ez q
ue d
es fu
sibl
es a
dapt
és s
ont m
onté
s cô
té r
ésea
u.
ST
OP
!V
ER
IFIE
Z q
ue le
mot
eur
peut
êtr
e dé
mar
ré e
n to
ute
sécu
rité.
Pou
r le
pre
rmie
r dé
mar
rage
,no
us c
onse
illon
s de
dés
acco
uple
r la
mac
hine
ent
raîn
ée s
i elle
ris
que
d’êt
re d
étér
ioré
e en
cas
d’er
reur
de
sens
de
rota
tion
du m
oteu
r.6
Ven
tilat
eur
Dén
udez
l’is
olan
t de
tous
les
câbl
es d
essi
gnau
x (c
âble
de
la d
ynam
o ta
chy
ou d
uco
deur
, et a
utre
câb
le d
’E/S
ana
logi
ques
et
logi
ques
).R
acco
rdez
le b
linda
ge à
la b
arre
tte d
e te
rre
du D
CS
400
.
Vér
ifiez
la m
ise
à la
terr
e.
Alim
. Ele
ctro
niqu
e

II K C-2
Annexe C
Pro
cédu
re p
our
le r
égla
ge d
es p
aram
ètre
s:-
App
uyez
sur
ME
NU
pou
r ac
céde
r au
mod
eM
EN
U. M
EN
U s
’affi
che
sur
la li
gne
d’ét
at.
-A
ppuy
ez s
ur E
NT
ER
pou
r sé
lect
ionn
er l
e gr
oupe
Don
nées
Mot
eur.
-S
élec
tionn
ez l
e pa
ram
ètre
ave
c le
s to
uche
s à
flèch
e.
- A
ppuy
ez s
ur E
NT
ER
pou
r ac
céde
r au
mod
e P
ara-
mét
rage
.-
Mod
ifiez
la v
aleu
r av
ec le
s to
uche
s à
flèch
e.
- Val
idez
la n
ouve
lle v
aleu
r par
un
appu
i sur
EN
TE
R.
- Apr
ès a
voir
régl
é to
us le
s pa
ram
ètre
s, a
ppuy
ez d
eux
fois
sur
ME
NU
pou
r re
veni
r au
mod
e O
UT
PU
T.
Affi
cheu
r en
mod
e O
UT
PU
T
Pou
r le
mac
ro-p
rogr
amm
e S
tand
ard
, les
para
mèt
res
suiv
ants
du
DC
S 4
00 d
oive
nt ê
tre
régl
és:
1.01
- I
Nom
Indu
it1.
02 -
U N
om In
duit
1.03
- U
Nom
Exc
itatio
n1.
04 -
U N
om E
xcita
tion
1.05
- V
itess
e de
Bas
e7.
01 -
Lan
gue
8 P
aram
étra
ge a
vec
la m
icro
-con
sole
0rpm
0V 0A 0rpm
OUTPUT MENU AUTO OFF HAND REM LOC <RUN>
1 Motor Settings
MENU AUTO OFF HAND REM LOC <RUN>
400V
1.02 Arm Volt Nom
MENU AUTO OFF HAND REM LOC <RUN>
Le m
oteu
r es
t mai
nten
ant p
rêt à
tour
ner.
Le v
aria
teur
est
com
man
dé p
ar le
s en
trée
s lo
giqu
es:f
erm
ez l’
inte
rrup
teur
ON
/OF
F p
our
dém
arre
r le
mot
eur.
Le v
aria
teur
est
com
man
dé p
ar la
mic
ro-c
onso
le :
pass
ez e
n m
ode
de c
omm
ande
Loc
al p
ar u
n ap
pui s
urLO
C/R
EM
. App
uyez
sur
(I)
pou
r dé
mar
rer
le m
oteu
r.
10
Not
a! A
vant
d’a
ugm
ente
r la
vite
sse
du m
oteu
r, v
érifi
ez q
u’il
tour
ne d
ans
le s
ens
dési
ré.
9
Sen
s de
rota
tion
Ava
nt
Arr
ière
Pou
r ré
gler
la r
éfér
ence
par
ent
rée
anal
ogiq
ue :
- Pou
r aug
men
ter o
u di
min
uer l
a ré
fére
nce
vite
sse,
tour
nez
le p
oten
tiom
è-tr
e-
Pou
r ar
rête
r le
mot
eur,
ouv
rez
l’int
erru
pteu
r O
N/O
FF
Pou
r ré
gler
la r
éfér
ence
ave
c la
mic
ro-c
onso
le :
- Pou
r aug
men
ter l
a ré
fére
nce,
app
uyez
sur
la to
uche
à fl
èche
ver
s le
hau
t-
Pou
r di
min
uer
la r
éfér
ence
, app
uyez
sur
la to
uche
à fl
èche
ver
s le
bas
- P
our
arrê
ter
le m
oteu
r, a
ppuy
ez s
ur la
touc
he (
I)
Not
a!S
ectio
nnez
touj
ours
l’al
imen
tatio
n ré
seau
ava
nt d
’inte
rven
ir su
rle
DC
S 4
00 o
u le
mot
eur.
1 2 3 4 5 6 7 8 9
X2
1 102 3 4 5 6 7 8 9
X4
+E
A1
-EA
1+
EA
2-E
A2
0V+
10V
-10V
SA
1S
A2
EL1
EL
2E
L3
EL
4E
L5
EL
6E
L7
EL
8+
24V 0V
M
ette
z l’é
lect
roni
que
sous
tens
ion
A
ppuy
ez s
ur
A
ppuy
ez s
ur
l A
ppuy
ez s
ur
S
uive
z le
s in
stru
ctio
ns
Pou
rsui
vez
au p
oint
9.
Exe
mpl
e de
rac
cord
emen
t des
sig
naux
ave
c le
mac
ro-
prog
ram
me
Sta
ndar
d et
en
régu
latio
n de
vite
sse
FE
M.
Not
a !
Le v
aria
teur
peu
t dém
arre
r dè
s sa
mis
e so
uste
nsio
n.
Pou
r un
e ré
fére
nce
vite
sse
anal
ogiq
ue, r
acco
rdez
un
pote
ntio
mèt
re (
2-10
kW
) au
x bo
rnes
X2:
1,2,
5,6.
Pou
r dé
mar
rer
le v
aria
teur
, act
ivez
les
entr
ées
logi
ques
EL7
/ E
L8.
Met
tez
sous
tens
ion.
Not
a!P
our
des
info
rmat
ions
dét
aillé
es s
ur le
s E
/S, c
f.m
anue
l du
DC
S 4
00, s
ectio
n M
acro
-pro
gram
mes
et /
ou L
iste
com
plèt
e de
s pa
ram
ètre
s.
7 M
acro
-pro
gram
me
Sta
ndar
d
Not
a!Le
DC
S 4
00 p
eut ê
tre
conf
igur
é se
lon
plus
ieur
s pr
océd
ures
:-
Par
amét
rage
ave
c la
mic
ro-c
onso
le-
Con
figur
atio
n as
sist
ée a
vec
la m
icro
-con
sole
et l
’Ass
ista
nt-
Par
amét
rage
ave
c l’o
util
logi
ciel
Driv
e W
indo
w L
ight
- C
onfig
urat
ion
assi
stée
par
un
mic
ro-o
rdin
ateu
r (P
C)
avec
l’A
ssis
tant
(in
clus
dan
s D
rive
Win
dow
Lig
ht)
Dan
s ce
min
i-gui
de, n
ous
décr
ivon
s la
pro
cédu
re d
e co
nfig
urat
ion
avec
la m
icro
-con
sole
.P
our
la c
onfig
urat
ion
assi
stée
ave
c la
mic
ro-c
onso
le e
t l’A
ssis
tant
, lan
cez
ce d
erni
erco
mm
e su
it :
(17(5
0(18
/2&
5(0
5(6(71500rpm
440V 368A 1500rpm
OUTPUT MENU AUTO OFF HAND REM LOC <RUN>
$%%
Réf
vit
esse
Arr
êt u
rgen
ce
ON
/OF
F
Mar
che
0(18
(17(5

Annexe D - Exemples de paramétrage de base
II K D-1
Les paramétrages de base suivants sont le fruit de notre expérience dans des applications types.
Les tableaux suivants reprennent ces paramétrages.
Tableau 1: Fonctionnement en régulation d'induitTableau 2: Fonctionnement en régulation d'excitationTableau 3: Fonctionnement en régulation d'excitation avec limitation du courant en fonction de la vitesseTableau 4: Paramètres communs aux trois modes de fonctionnement
Fonctionnement en régulation d'induit
P
nVitesse nominale
PnormPlage de régulation d‘induit
105
Tableau 1
N° param. Nom Paramètre Fonction Valeur Réglage101 I Nom Induit Courant nominal d’induit Ianom
102 U Nom Induit Tension nominale d’induit Uanom
103 I Nom Excitat Courant nominal d’excitation Ienom
104 U Nom Excitat Tension nominale d’excitation Uenom
105 Vitesse de Base Vitesse nominale nnom
201 Sel Macro Sélection du macro-programme Sélection202 Choix Commande Sélection du dispositif de
commandeSélection
203 Type Arret Sélection du type d'arrêt Sélection204 Type Arret Urg Sélection du type d'arrêt d'urgence Sélection
502 Mode Mesure Vit FEM, dynamo tachy ou codeur Sélection503 Nbre Imp/Tour Nombre d'impulsions/tour (si
param. 503 = codeur)Nombred'mpuls.
509 Rampe Accel Temps de rampe d'accélération sec510 Rampe Decel Temps de rampe de décélération sec511 Rampe Arret Urg Temps de rampe d'arrêt d'urgence
(si param. 204 = Rampe)sec
601 Echell EA1 100% Tension du signal de référence àvitesse de 100%
5…10V
602 Echell EA1 0% Tension du signal de référence àvitesse de 0%
0…5V
701 Langue Sélection de la langue pour ledialogue avec la micro-console
Sélection

II K D-2
Fonctionnement en régulation d'excitation
P
nVitesse nominale
PnormPlage de régulation d‘induit
Plage de régulationd‘excitation
Vitesse maxi
106105
Tableau 2
N° param. Nom Paramètre Fonction Valeur Réglage101 I Nom Induit Courant nominal d’induit Ianom
102 U Nom Induit Tension nominale d’induit Uanom
103 I Nom Excitat Courant nominal d’excitation Ienom
104 U Nom Excitat Tension nominale d’excitation Uenom
105 Vitesse Nom Mot Vitesse nominale nnom
106 Vitesse Maxi Vitesse maxi en mode défluxage nmax
201 Sel Macro Sélection du macro-programme Sélection202 Choix Commande Sélection du dispositif de
commandeSélection
203 Type Arret Sélection du type d'arrêt Sélection204 Type Arret Urg Sélection du type d'arrêt d'urgence Sélection
502 Mode Mesure Vit FEM, dynamo tachy ou codeur Sélection503 Nbre Imp/Tour Nombre d'impulsions/tour
(si param. 503 = codeur)Nombred'impuls.
509 Rampe Accel Temps de rampe d'accélération sec510 Rampe Decel Temps de rampe de décélération sec511 Rampe Arret Urg Temps de rampe d'arrêt d'urgence
(si param. 204 = Rampe)sec
601 Echell EA1 100% Tension du signal de référence àvitesse de 100%
5…10V
602 Echell EA1 0% Tension du signal de référence àvitesse de 0%
0…5V
701 Langue Sélection de la langue pour ledialogue avec la micro-console
Sélection
Annexe D
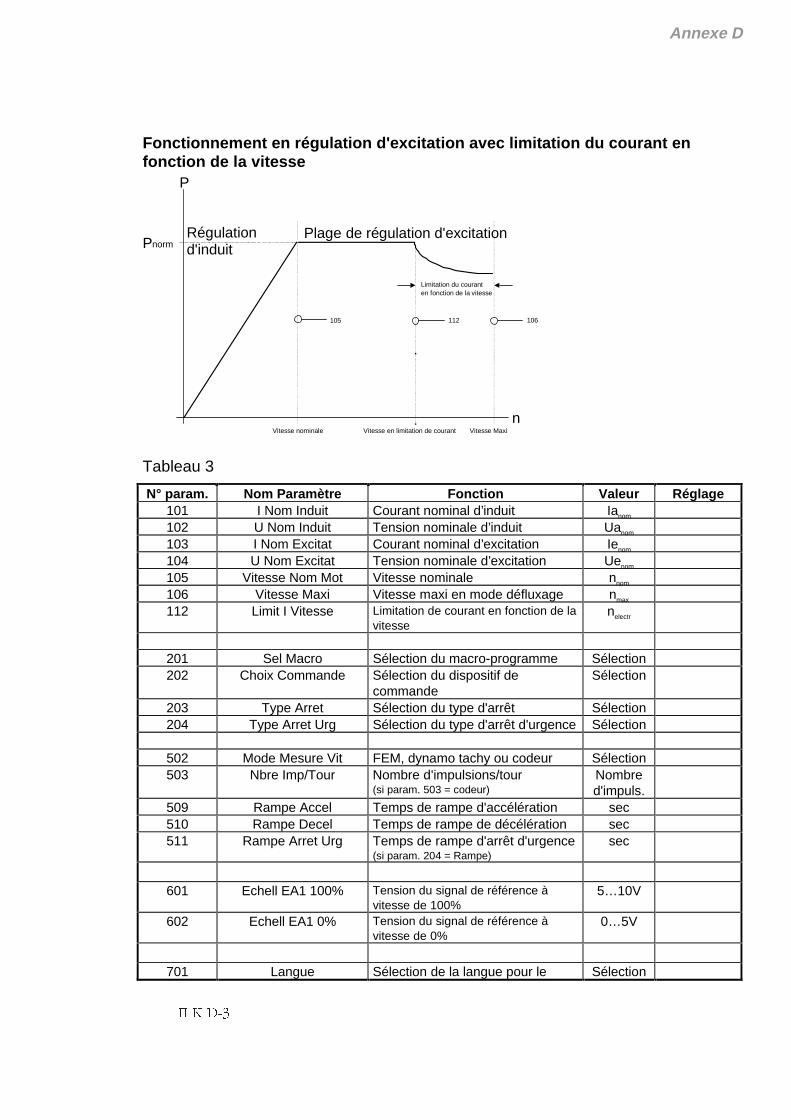
Fonctionnement en régulation d'excitation avec limitation du courant enfonction de la vitesse
P
nVitesse nominale
PnormRégulationd'induit
Plage de régulation d'excitation
Vitesse en limitation de courant Vitesse Maxi
105 112 106
Limitation du couranten fonction de la vitesse
Tableau 3
N° param. Nom Paramètre Fonction Valeur Réglage101 I Nom Induit Courant nominal d’induit Ianom
102 U Nom Induit Tension nominale d’induit Uanom
103 I Nom Excitat Courant nominal d’excitation Ienom
104 U Nom Excitat Tension nominale d’excitation Uenom
105 Vitesse Nom Mot Vitesse nominale nnom
106 Vitesse Maxi Vitesse maxi en mode défluxage nmax
112 Limit I Vitesse Limitation de courant en fonction de lavitesse
nelectr
201 Sel Macro Sélection du macro-programme Sélection202 Choix Commande Sélection du dispositif de
commandeSélection
203 Type Arret Sélection du type d'arrêt Sélection204 Type Arret Urg Sélection du type d'arrêt d'urgence Sélection
502 Mode Mesure Vit FEM, dynamo tachy ou codeur Sélection503 Nbre Imp/Tour Nombre d'impulsions/tour
(si param. 503 = codeur)Nombred'impuls.
509 Rampe Accel Temps de rampe d'accélération sec510 Rampe Decel Temps de rampe de décélération sec511 Rampe Arret Urg Temps de rampe d'arrêt d'urgence
(si param. 204 = Rampe)sec
601 Echell EA1 100% Tension du signal de référence àvitesse de 100%
5…10V
602 Echell EA1 0% Tension du signal de référence àvitesse de 0%
0…5V
701 Langue Sélection de la langue pour le Sélection
Annexe D
II K D-3
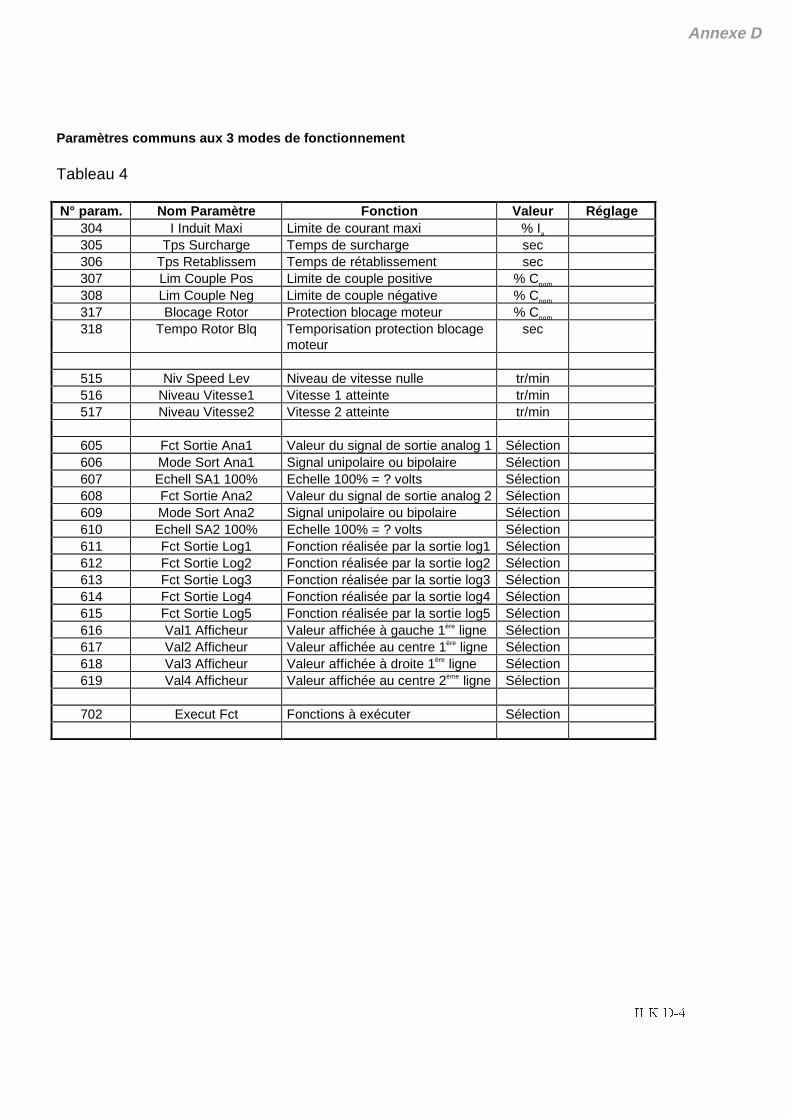
Paramètres communs aux 3 modes de fonctionnement
Tableau 4
N° param. Nom Paramètre Fonction Valeur Réglage304 I Induit Maxi Limite de courant maxi % Ia
305 Tps Surcharge Temps de surcharge sec306 Tps Retablissem Temps de rétablissement sec307 Lim Couple Pos Limite de couple positive % Cnom
308 Lim Couple Neg Limite de couple négative % Cnom
317 Blocage Rotor Protection blocage moteur % Cnom
318 Tempo Rotor Blq Temporisation protection blocagemoteur
sec
515 Niv Speed Lev Niveau de vitesse nulle tr/min516 Niveau Vitesse1 Vitesse 1 atteinte tr/min517 Niveau Vitesse2 Vitesse 2 atteinte tr/min
605 Fct Sortie Ana1 Valeur du signal de sortie analog 1 Sélection606 Mode Sort Ana1 Signal unipolaire ou bipolaire Sélection607 Echell SA1 100% Echelle 100% = ? volts Sélection608 Fct Sortie Ana2 Valeur du signal de sortie analog 2 Sélection609 Mode Sort Ana2 Signal unipolaire ou bipolaire Sélection610 Echell SA2 100% Echelle 100% = ? volts Sélection611 Fct Sortie Log1 Fonction réalisée par la sortie log1 Sélection612 Fct Sortie Log2 Fonction réalisée par la sortie log2 Sélection613 Fct Sortie Log3 Fonction réalisée par la sortie log3 Sélection614 Fct Sortie Log4 Fonction réalisée par la sortie log4 Sélection615 Fct Sortie Log5 Fonction réalisée par la sortie log5 Sélection616 Val1 Afficheur Valeur affichée à gauche 1ère ligne Sélection617 Val2 Afficheur Valeur affichée au centre 1ère ligne Sélection618 Val3 Afficheur Valeur affichée à droite 1ère ligne Sélection619 Val4 Afficheur Valeur affichée au centre 2ème ligne Sélection
702 Execut Fct Fonctions à exécuter Sélection
Annexe D
II K D-4

Du fait de notre politique d'amélioration perma-
nente de nos produits et d'intégration des techno-
logies les plus innovantes, vous comprendrez
aisément que nous nous réservons tout droit de
modification dans la conception et les caractéris-
tiques des solutions que nous proposons.
ABB Industrietechnik GmbHAntriebe und AutomationPostfach 1180D-68619 LampertheimTelefon +49(0) 62 06 5 03-0Telefax +49(0) 62 06 5 03-6 09
3AD
W 0
00 0
95 R
0107
RE
V A
02_9
9