use or disclosure of document data is subject to the restrictions on the title pagepage 1 © 2014...
TRANSCRIPT

Use or disclosure of document data is subject to the restrictions on the title page Page 1
© 2014 Carnegie Robotics LLC.
MARSUPIALDetailed Design Review
Carnegie Robotics LLC.#10 40th Street
Pittsburgh, PA 15201
Jared RabyNico Gallardo
Chris GriffinSean Greenslade
Wesly Rice

Use or disclosure of document data is subject to the restrictions on the title page Page 2
© 2014 Carnegie Robotics LLC.
Agenda
• Introduction
• Systems Design® Tracks/Suspension® Wireless Node Payload® Wireless Node Deployment® Electrical Systems
• Risks
• MSD II Schedule
• Questions
Use or disclosure of document data is subject to the restrictions on the title page Page 3
© 2014 Carnegie Robotics LLC.
Introduction
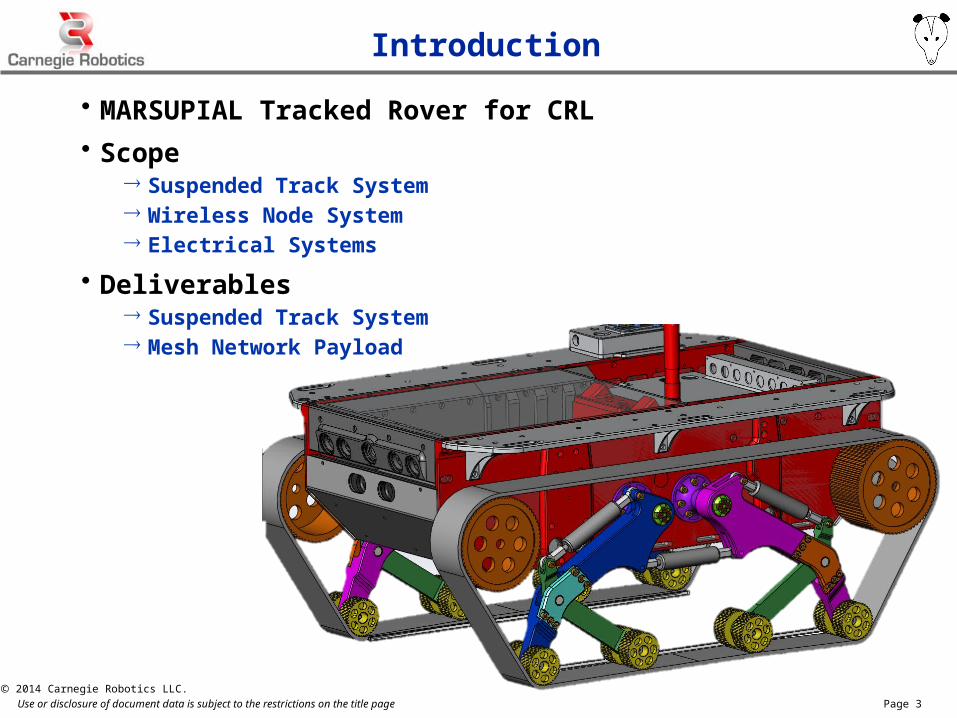
• MARSUPIAL Tracked Rover for CRL
• Scope® Suspended Track System® Wireless Node System ® Electrical Systems
• Deliverables® Suspended Track System® Mesh Network Payload

Use or disclosure of document data is subject to the restrictions on the title page Page 4
© 2014 Carnegie Robotics LLC.
TRACKS AND SUSPENSIONWes

Use or disclosure of document data is subject to the restrictions on the title page Page 5
© 2014 Carnegie Robotics LLC.
Tracked Suspension System
• Suspension® Rugged against impact shock® Various environmental areas® Climb obstacles® Self Contained
– IP Rated seals
• Drive-Train® Off the shelf motors® Meet speed and torque requirements
– Simple gearing® Integrated electronics
– Odometry

Use or disclosure of document data is subject to the restrictions on the title page Page 6
© 2014 Carnegie Robotics LLC.
Tracked Suspension System
• Tracks® Proper materials
– Coefficient of friction– Material stretch
® Outdoor resistant– Chemical and physical ruggedness
® Ease to install and remove

Use or disclosure of document data is subject to the restrictions on the title page Page 7
© 2014 Carnegie Robotics LLC.
Tracked Suspension System
• Drive-Train® Required Speed
– Min of 5mph on level ground
® Require Torque– To move 150 lbs of
robot and payload® Off the Shelf Motor
– Reduce overall price® Realistic Gear Train
– 8.0:1 – 12.0:1– Planetary

Use or disclosure of document data is subject to the restrictions on the title page Page 8
© 2014 Carnegie Robotics LLC.
Tracked Suspension System BOM
Index Component Indv Price EstQty System Price Est1 TENSIONER BASE 150.00$ 4 UPPER TENSIONING ASSY 600.00$ 2 TENSIONER ARM 50.00$ 4 UPPER TENSIONING ASSY 200.00$ 3 UPPER TENSION SHAFT 30.00$ 4 UPPER TENSIONING ASSY 120.00$ 4 UPPER TENSIONING WHEEL 75.00$ 4 UPPER TENSIONING ASSY 300.00$ 5 BEARING, ZFM_1214 10.00$ 8 UPPER TENSIONING ASSY 80.00$ 6 WASHER, FLAT, M12 0.50$ 8 UPPER TENSIONING ASSY 4.00$ 7 WASHER,FLAT,M10 0.50$ 4 UPPER TENSIONING ASSY 2.00$ 8 WASHER,BELVILE 10MM 2.00$ 4 UPPER TENSIONING ASSY 8.00$ 9 WASHER,BELVILE 18.5MM 2.00$ 4 UPPER TENSIONING ASSY 8.00$
10 RETAINING RING,SMALLEY,VSM-14 2.00$ 4 UPPER TENSIONING ASSY 8.00$ 11 RETAINING RING,SMALLEY,VSM-12 2.00$ 8 UPPER TENSIONING ASSY 16.00$ 12 RETAINING RING,SMALLEY,VSM-6 2.00$ 4 UPPER TENSIONING ASSY 8.00$ 13 RETAINING RING,SMALLEY,VSM-10 2.00$ 4 UPPER TENSIONING ASSY 8.00$ 14 CLOCK TORSION SPRING 30.00$ 4 UPPER TENSIONING ASSY 120.00$ 15 M5-0.8X16MM 0.50$ 4 UPPER TENSIONING ASSY 2.00$ 16 BALLBEARING,SEALED,10MMID 8.00$ 8 UPPER TENSIONING ASSY 64.00$ 17 CHRISTIE ARM LOWER 75.00$ 4 LOWER ARM ASSY 300.00$ 18 BALLBEARING SEALED, 8MMID 10.00$ 8 LOWER ARM ASSY 80.00$ 19 BALLJOING ROD END 5.00$ 4 LOWER ARM ASSY 20.00$ 20 NUT NYLOC M5-0.8 0.50$ 4 LOWER ARM ASSY 2.00$ 21 LOWER CHRISTIE AXEL 20.00$ 4 LOWER ARM ASSY 80.00$ 22 M5-0.8X25MM 0.50$ 4 LOWER ARM ASSY 2.00$ 23 TENION WHEEL SHAFT 20.00$ 8 TENSIONWHEEL ASSY 160.00$ 24 TENSIONING WHEEL 65.00$ 16 TENSIONWHEEL ASSY 1,040.00$
Preliminary Mechanical BOM

Use or disclosure of document data is subject to the restrictions on the title page Page 9
© 2014 Carnegie Robotics LLC.
Tracked Suspension System BOM 2
25 RETAINING RING SMALLEY VSM-8 3.00$ 16 TENSIONWHEEL ASSY 48.00$ 26 WASHER, FLAT, M8 0.50$ 16 TENSIONWHEEL ASSY 8.00$ 27 WASHER, BELVILLE M8 2.00$ 8 TENSIONWHEEL ASSY 16.00$ 28 CHRISTIE ARM, UPPER 150.00$ 2 CHRISTIE ARM,UPPER ASSY 300.00$ 29 BALLBEARING SEALED, 8MMID 10.00$ 4 CHRISTIE ARM,UPPER ASSY 40.00$ 30 BALLJOING ROD END 5.00$ 4 CHRISTIE ARM,UPPER ASSY 20.00$ 31 BEARING,ZFM_1214 10.00$ 2 CHRISTIE ARM,UPPER ASSY 20.00$ 32 BEARING,ZFM_2023 10.00$ 4 CHRISTIE ARM,UPPER ASSY 40.00$ 33 AIR SPRING, TGF-8-20-150 40.00$ 2 CHRISTIE ARM,UPPER ASSY 80.00$ 34 M5-0.8X35MM 0.50$ 4 CHRISTIE ARM,UPPER ASSY 2.00$ 35 NUT NYLOC M5-0.8 0.50$ 4 CHRISTIE ARM,UPPER ASSY 2.00$ 36 UPPER ARM TO CHASSIS MOUNT 150.00$ 4 SUSPENSION MOUNT TO CHASSIS 600.00$ 37 RETAINING RING SMALLEY FS020 10.00$ 4 SUSPENSION MOUNT TO CHASSIS 40.00$ 38 FLAT WASHER, M20 0.50$ 8 SUSPENSION MOUNT TO CHASSIS 4.00$ 39 WASHER,BELVILLE M20 2.00$ 4 SUSPENSION MOUNT TO CHASSIS 8.00$ 40 CHRISTIE ARM UPPER REVERSE 150.00$ 2 CHRISTIE ARM,UPPER REVERSE ASSY 300.00$ 41 BALLBEARING SEALED, 8MMID 10.00$ 4 CHRISTIE ARM,UPPER REVERSE ASSY 40.00$ 42 BALLJOING ROD END 5.00$ 4 CHRISTIE ARM,UPPER REVERSE ASSY 20.00$ 43 BEARING,ZFM_1214 10.00$ 2 CHRISTIE ARM,UPPER REVERSE ASSY 20.00$ 44 BEARING,ZFM_2023 10.00$ 4 CHRISTIE ARM,UPPER REVERSE ASSY 40.00$ 45 AIR SPRING, TGF-8-20-150 40.00$ 2 CHRISTIE ARM,UPPER REVERSE ASSY 80.00$ 46 AIR SPRING, TGF-8-20-500 40.00$ 2 CHRISTIE ARM,UPPER REVERSE ASSY 80.00$ 47 M5-0.8X35MM 0.50$ 4 CHRISTIE ARM,UPPER REVERSE ASSY 2.00$

Use or disclosure of document data is subject to the restrictions on the title page Page 10
© 2014 Carnegie Robotics LLC.
Tracked Suspension System BOM 348 NUT NYLOC M5-0.8 0.50$ 4 CHRISTIE ARM,UPPER REVERSE ASSY 2.00$ 49 FRONT UNDRIVEN BASE 95.00$ 2 UNDRIVEN WHEEL TOP ASSY 190.00$ 50 BALLBEARING,SEALED,35MMID 10.00$ 4 UNDRIVEN WHEEL TOP ASSY 40.00$ 51 ENCODER SHAFT HOLDER 75.00$ 2 UNDRIVEN WHEEL TOP ASSY 150.00$ 52 USGIDITAL MAE3-X-197-220-7-X 35.00$ 2 UNDRIVEN WHEEL TOP ASSY 70.00$ 53 UNDRIVEN WHEEL BEARING CAP 95.00$ 2 UNDRIVEN WHEEL TOP ASSY 190.00$ 54 GREASE SEAL, 40MMID 20.00$ 2 UNDRIVEN WHEEL TOP ASSY 40.00$ 55 FRONT UNDRIVEN, AL 70 TK20K13-20250.00$ 2 UNDRIVEN WHEEL TOP ASSY 500.00$ 56 WASHER BELVILLE 35.5MMID 5.00$ 2 UNDRIVEN WHEEL TOP ASSY 10.00$ 57 M4-0.7X12MM 0.50$ 8 UNDRIVEN WHEEL TOP ASSY 4.00$ 58 M5-0.8X12MM 0.50$ 10 UNDRIVEN WHEEL TOP ASSY 5.00$ 59 BEARING CAP, LOWER, LEFT 50.00$ 2 CHRISTIE UPPER BEARING ASSY 100.00$ 60 BEARING,ZFM_1214 10.00$ 2 CHRISTIE UPPER BEARING ASSY 20.00$ 61 BEARING CAP, LOWER, RIGHT 50.00$ 2 CHRISTIE UPPER BEARING REVERSE ASSY 100.00$ 62 BEARING,ZFM_1214 10.00$ 2 CHRISTIE UPPER BEARING REVERSE ASSY 20.00$ 63 CHASIS LEFT SIDE 750.00$ 1 LEFTSIDE SUSPENSION_TOP ASSY 750.00$ 64 M5 THREADED INSERTS 1.00$ 36 LEFTSIDE SUSPENSION_TOP ASSY 36.00$ 65 M5-0.7X12MM 0.50$ 12 LEFTSIDE SUSPENSION_TOP ASSY 6.00$ 66 M5-0.7X14MM 0.50$ 42 LEFTSIDE SUSPENSION_TOP ASSY 21.00$ 67 CHASIS RIGHT SIDE 750.00$ 1 RIGHTSIDE SUSPENSION_TOP ASSY 750.00$ 68 M5 THREADED INSERTS 1.00$ 36 RIGHTSIDE SUSPENSION_TOP ASSY 36.00$ 69 M5-0.7X12MM 0.50$ 12 RIGHTSIDE SUSPENSION_TOP ASSY 6.00$ 70 M5-0.7X14MM 0.50$ 42 RIGHTSIDE SUSPENSION_TOP ASSY 21.00$ 71 MAXON EC60 FLAT 280.00$ 2 MOTOR TOP ASSY 560.00$ 72 SEPAC BRAKE SEB-175 150.00$ 2 MOTOR TOP ASSY 300.00$ 73 MOTOR,BRAKE,MOUNTING FLANGE 150.00$ 2 MOTOR TOP ASSY 300.00$ 74 MOTOR CHASSIS CASE 100.00$ 2 MOTOR TOP ASSY 200.00$ 75 REAR DRIVE WHEEL 250.00$ 2 MOTOR TOP ASSY 500.00$ 76 M4-0.7X10MM 0.50$ 22 MOTOR TOP ASSY 11.00$
Est Total 9,980.00$

Use or disclosure of document data is subject to the restrictions on the title page Page 11
© 2014 Carnegie Robotics LLC.
WIRELESS NODE PAYLOADSean

Use or disclosure of document data is subject to the restrictions on the title page Page 12
© 2014 Carnegie Robotics LLC.
Wireless Node Payload
• Droppable Node® OLinuXino – 575 MHz ARM Core
– Running Arch Linux with B.A.T.M.A.N. wireless mesh protocol– USB Wi/Fi adapter– Buck converter– Li-on battery providing upwards of 6 hours of runtime
• Current Prototype® 3D printed shell® Off-the-shelf antenna

Use or disclosure of document data is subject to the restrictions on the title page Page 13
© 2014 Carnegie Robotics LLC.
Wireless Node Payload Block Diagram

Use or disclosure of document data is subject to the restrictions on the title page Page 14
© 2014 Carnegie Robotics LLC.
Wireless Mesh Node BOM
Component Cost Distributor Manufacturer Manufacturer Part Number Qty. SystemPrice Est.
5 Volt Buck Converter $6.71Mouser RECOM Power R-785.0-0.5 8Puck $53.68Single Board Computer $32.95Mouser Olimex Ltd. IMX233-OLINUXINO-NANO 8Puck $263.60
WLAN USB Adapter $14.33Amazon LLC TP-Link TP-LINK TL-WN722N 8Puck $114.64
Li-Ion Battery $3.39Battery Space Battery Space PL-402248-2C 24Puck $81.36
Battery Protection Board $5.87Battery Space Battery Space PCB-LiS3A4 8Puck $46.96
Total $560.24

Use or disclosure of document data is subject to the restrictions on the title page Page 15
© 2014 Carnegie Robotics LLC.
WIRELESS NODE DEPLOYMENT
Jared
Use or disclosure of document data is subject to the restrictions on the title page Page 16
© 2014 Carnegie Robotics LLC.
Wireless Node Deployment System
• Needs to readily deploy the node while keeping in place during high impact moments
® High holding strength® Ability to drop the puck easily
• Deployment system should be isolated from the outside to comply with IP standards
® Dust / water prevention® Short circuit protection
• Magnetic holding system developed ® Magnetic slide in the track

Use or disclosure of document data is subject to the restrictions on the title page Page 17
© 2014 Carnegie Robotics LLC.
Wireless Node Deployment System CAD

Use or disclosure of document data is subject to the restrictions on the title page Page 18
© 2014 Carnegie Robotics LLC.
Wireless Node Deployment Schematic

Use or disclosure of document data is subject to the restrictions on the title page Page 19
© 2014 Carnegie Robotics LLC.
Wireless Node Deployment System PCB

Use or disclosure of document data is subject to the restrictions on the title page Page 20
© 2014 Carnegie Robotics LLC.
Wireless Node Deployment System BOM
Index Component Cost Distributor ManufacturerManufacturer Part Number Qty.
Price Est.
1 ALEL 1uF 50V $0.23Mouser Nichicon UVR1H010MDD1TD 3 $0.69
2 MLCC 0.1uF 50V X7R $0.10Mouser Kemet C0603C104K5RACTU 1 $0.10
3ISP Connection Headers $0.54Mouser Molex 10-89-7061 1 $0.54
4 Servo Connections $0.19Mouser Molex 87891-0306 10 $1.88
5Payload Microcontroller $1.30Mouser Atmel ATTINY2313A-SUR 1 $1.30
6TTL to RS232 Converter $3.84Mouser
Maxim Integrated MAX232ACSE+ 1 $3.84
7 12 MHz Crystal $0.49Mouser Vishay XT9SNLANA12M 1 $0.49
8 22 pF capacitor $0.20Digikey Yageo CC0402JRNPO9BN220 2 $0.40
Total $9.24

Use or disclosure of document data is subject to the restrictions on the title page Page 21
© 2014 Carnegie Robotics LLC.
POWER MANAGEMENT AND DISTRIBUTION
Nico and Chris

Use or disclosure of document data is subject to the restrictions on the title page Page 22
© 2014 Carnegie Robotics LLC.
Electrical Diagram

Use or disclosure of document data is subject to the restrictions on the title page Page 23
© 2014 Carnegie Robotics LLC.
Electrical Diagram – Batteries

Use or disclosure of document data is subject to the restrictions on the title page Page 24
© 2014 Carnegie Robotics LLC.
Electrical Diagram – Power Train

Use or disclosure of document data is subject to the restrictions on the title page Page 25
© 2014 Carnegie Robotics LLC.
Electrical Diagram – Peripherals
Use or disclosure of document data is subject to the restrictions on the title page Page 26
© 2014 Carnegie Robotics LLC.
Power Budget
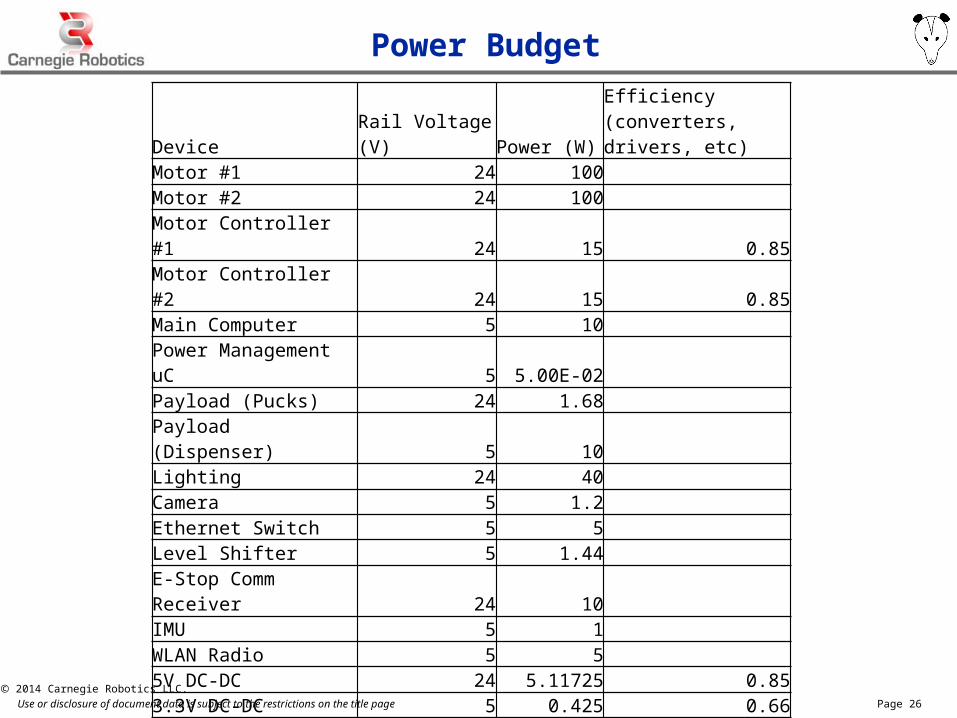
Device Rail Voltage (V) Power (W)Efficiency (converters, drivers, etc)
Motor #1 24 100Motor #2 24 100Motor Controller #1 24 15 0.85Motor Controller #2 24 15 0.85Main Computer 5 10Power Management uC 5 5.00E-02Payload (Pucks) 24 1.68Payload (Dispenser) 5 10Lighting 24 40Camera 5 1.2Ethernet Switch 5 5Level Shifter 5 1.44E-Stop Comm Receiver 24 10IMU 5 1WLAN Radio 5 55V DC-DC 24 5.11725 0.853.3V DC-DC 5 0.425 0.66
Rail Power (W) Current (A)24V 286.8 11.945V 34.115 6.8233.3V 0.825 0.25

Use or disclosure of document data is subject to the restrictions on the title page Page 27
© 2014 Carnegie Robotics LLC.
Power Management Schematic

Use or disclosure of document data is subject to the restrictions on the title page Page 28
© 2014 Carnegie Robotics LLC.
Power Management Schematic (cont.)
• Two 24V Lithium Ion batteries provide 2kW of power (max)
• All current is sourced through pin 5 of the current sensor

Use or disclosure of document data is subject to the restrictions on the title page Page 29
© 2014 Carnegie Robotics LLC.
Power Management Schematic (cont.)

Use or disclosure of document data is subject to the restrictions on the title page Page 30
© 2014 Carnegie Robotics LLC.
Power Management Schematic (cont.)
• Low current will be passed through the circuit → Low power dissipation
• Potentiometer is used to tune the divider

Use or disclosure of document data is subject to the restrictions on the title page Page 31
© 2014 Carnegie Robotics LLC.
Power Management Schematic (cont.)

Use or disclosure of document data is subject to the restrictions on the title page Page 32
© 2014 Carnegie Robotics LLC.
Power Management Schematic (cont.)
Rail # of outputs24Vu 55V 83.3V 3GNF 20TX 1
RX 1

Use or disclosure of document data is subject to the restrictions on the title page Page 33
© 2014 Carnegie Robotics LLC.
Power Management Pin Allocations
ATMEGA328 Serial Communication ISP Sampling Crystal Total Analog Digital
Input 1 4 2 2 9 3 6Output 1 1 1 0

Use or disclosure of document data is subject to the restrictions on the title page Page 34
© 2014 Carnegie Robotics LLC.
RISKS

Use or disclosure of document data is subject to the restrictions on the title page Page 35
© 2014 Carnegie Robotics LLC.
System Risks
Risk SeverityOccurrence Probability Mitigation Owner
1Staffing/engineering
ability 4 1
Consultation with advisor/customerScale back of scope Nico
2 Budget 5 1
Consultation with advisor/customerScale back of scope Wes
3 Machine setbacks 3 1 Plenty of lead time Wes4 Shipping setbacks 3 1 Plenty of lead time Nico5 Part setbacks 3 1 Plenty of lead time Jared
6Incorrect Engineering
Analysis 2 3Thorough verification of analysis
Per subsystem
7 Ordering errors 3 3 Thorough verification of BOM Nico
8Catastrophic prototype
failure 5 1
Proof of conceptsSmall scale tests before large scale tests Chris
9 Time constraints 2 4
Consultation with advisor/customerScale back of scope Jared
10 Hardware failure 3 4Thorough design verificationSpare components Chris
11 Mechanical failure 3 4Thorough design verificationSpare components Wes
12 Software failure 3 4Thorough design verificationSpare components Sean
13 Environmental factors 1 5 Review weather conditions Jared14 Technological limits 3 1 Review current technologies Sean

Use or disclosure of document data is subject to the restrictions on the title page Page 36
© 2014 Carnegie Robotics LLC.
Mechanical Risks
Risk SeverityOccurrence Probability Mitigation Owner
1
Unstable control of the robot while it's hanging from straps connected to mini-crane 5 0
Consultation with advisor/customerScale back of scope Wes
2Module being dropped 5 2Reinforced chassis and shock absorption Wes
4
Lose control of vehicle while it's descendingfrom the ramp 5 1
Manual brakes/emergency brakesLimited/no power to the motors ->-> "coasting function" or clutch Wes
4Limited slip to turn 5 3Make sure motors are powerfulenough to cause slipping Wes

Use or disclosure of document data is subject to the restrictions on the title page Page 37
© 2014 Carnegie Robotics LLC.
Electrical Risks
Risk SeverityOccurrence Probability Mitigation Owner
1
Visual inspection of robot isnot adequate in identifying
all malfunctions 5 2Perform electrical self tests to identify other malfunctions Nico
2 Battery short circuits 5 1 Fuse to break circuit Chris
3 Emergency stop malfunction 5 1 It doesn't. Chris
4 Electrical noise in the system 4 1 Proper signal conditioning and isolation Nico
5 Packet loss 5 5 Apply failsafe Sean
6 Lighting malfunction 2 1 Infrared / additional backup Jared
7 Faulty IMU readings 4 1 redundant IMU Jared

Use or disclosure of document data is subject to the restrictions on the title page Page 38
© 2014 Carnegie Robotics LLC.
Software Risks
Risk SeverityOccurrence Probability Mitigation Owner
1 Packet loss 5 5 Apply software failsafe Sean / Jared
2Wheel slippage causesbad odometry readings 3 4
Use GPS / Inertial sensors to correct odometry readings Jared
3Poor / Unavailable GPS
connectivity 3 3Fall back on inertial sensors / odometry alone Jared / Sean
4 Faulty IMU readings 4 1 redundant IMU Jared
5 Unstable control loop 5 1 Vigorous control loop testing Nico

Use or disclosure of document data is subject to the restrictions on the title page Page 39
© 2014 Carnegie Robotics LLC.
Safety Risks
Risk SeverityOccurrence Probability Mitigation Owner
1Weight consideration when lifting the
robot 5 1>1 person is used to lift the robot Chris
2
Unstable control of the robot while it'sit's hanging from straps connected to
mini-crane 5 1
There needs to be 3 hook pointsin order to safely move the robotusing a crane Wes
3 Safety to personnel 5 3 Needs to meet military safetystandard MIL 883E Chris
4
Lose control of vehicle while it's descending
from the ramp 4 1
Manual brakes/emergency brakesLimited/no power to the motors ->-> "coasting function" or clutch Wes

Use or disclosure of document data is subject to the restrictions on the title page Page 40
© 2014 Carnegie Robotics LLC.
Schedule

Use or disclosure of document data is subject to the restrictions on the title page Page 41
© 2014 Carnegie Robotics LLC.
To be accomplished
• EMF interference mitigation
• Further node deployment development® Prototyping
• Schematic and PCB design
• Full BOMs
• Detailed Design Review Slideshow
• Final Detailed Design Review Slideshow
• Continued EDGE Updates

Use or disclosure of document data is subject to the restrictions on the title page Page 42
© 2014 Carnegie Robotics LLC.
Questions