university of debrecen, faculty of … of debrecen, faculty of engineering master of mechatronics...
TRANSCRIPT

UNIVERSITY OF DEBRECEN,
FACULTY OF ENGINEERING
Master of Mechatronics Engineering
(MSc degree program)
2015.

2
Address: H-4028 Debrecen, Ótemető u. 2-4., Hungary
Phone: +36-52-415-155/77742 Fax. +36 (52) 418-643
Email: [email protected]

3
Objectives and Perspectives
Mechatronics Engineering MSc Program The objective of the program is to train mechatronics engineers who are comfortable and competent with cutting edge technologies in both Mechanical and Electrical and Electronic Engineering. They may design, construct and maintain intelligent machines, micro-machines, smart structures, intelligent systems, control systems and consumer products such as cameras, washing machines or fully automated robotic assembly lines, or they may be involved with defense technology and systems. Our graduates will develop competence or acquire knowledge in the following areas: - mechanics, - electronics, - design, - signal analysis and processing, - computer systems, - computer science, - sensor and actuator technology, - automatic control, - electrical system design, - robotics and microprocessor technology. The curriculum contains the following subject modules: Basics of natural sciences: 26 credit points Mathematics, Application of differential equations, Theory of Optimal Control, Selected Chapters from Electronics, Advanced Systems, Dynamics of mechanical systems, Material Science, Computing Systems. Economics and Humanities: 12credit points Management, Investment decisions and applied economics for engineers. Specific compulsory subjects: 28 credit points Digital Servo Drives, Measuring and modeling, Control Theory, Real-time embedded system programming, Image process, Electronics Technology, Computer simulation. Field-specific vocational subjects: Building Mechatronics Specialization: 18 credit points Design of Building Mechatronics Systems, Industrial applications of mechatronics systems, vehicles, building automation and robotics I,II. Optional courses: 6 credit points Thesis: 30 credit points Duration of studies: 4 semesters, contact hours: 1.560 ECTS credits: 120, internship: 4 weeks
4
Final exam: 1. Written and oral exam on the topics of Industrial applications of mechatronics systems: vehicles, building automation and robotics 2. Defending the Diploma Work (oral presentation and discussion) Entry requirements: We accept applicants with the following BSc diplomas: - Mechatronics BSc (full credit recognition) - Mechanical engineering BSc, transportation engineering BSc, electrical engineering BSc, information technology BSc, BSc in Energetics, (partial credit recognition) - Other BSc diplomas can be considered according to the decision of the Credit Transfer Committee of the Faculty of Engineering, University of Debrecen (partial credit recognition). Students must have min. of 40 credit points (out of 70) recognized from previous studies to successfully apply to the Mechatronics Engineering MSc program. The missing credits can be obtained in a Pre-Master semester or taking extra courses during the first two semesters of the MSc program from the mechanical engineering BSc and Mechatronics engineering BSc programs of the Faculty of Engineering, University of Debrecen. Students must hand in certified (stamped and signed by the university) subject descriptions from previous studies to the Credit Transfer Committee of the Faculty of Engineering, University of Debrecen. A Skype interview with the applicants is a part of the entry process! Further information: http://eem.eng.unideb.hu/

5
Background
Laboratory and tutorial workshop background of the field of Mechatronics Engineering:
Laboratories of the Building Mechatronics Research Center
o Building mechatronics research laboratory: The goal of the activity of the laboratory is the elaboration of methods to carry out the intelligent evaluation of measurements, intervention and planning. The competence of the laboratory includes the integrated parts of building automation, building supervision and security technique including the operation of necessary sensors, regulators and interveners, which is defined as building mechatronics.
o Schneider Electric knowledge centre: All teachings, research, expertise and advisory activities concerning all products of Schneider Electric and the examination of the possibility of their use differing from conventional use. The laboratory is suitable for the following things: • Teaching of industrial controls by means of small and medium PLCs and realization of real industrial processes on twido demonstration tables built with PLCs of type M340. • Regulation of driving technical models by programming frequency changers (ATV11, ATV31 and ATV71). • Complex engineering tasks by connecting operating models into the network.

6
o Pneumatic laboratory (FESTO FACT -Festo Authorized and Certified Training Center): Teaching of pneumatics on the basis of didactic programs of FESTO Ltd. In the field of pneumatics, electro-pneumatics, hydraulics, electro-hydraulics, PLC technique,driving technique, mechatronics and sensor technique.
o Hydraulic laboratory : Presentation of most modern hydraulic systems and researches in the field of hydraulics, teaching of hydraulic subject-matters on the basis of the programs elaborated by FESTO Ltd. Didactic, resp. BOSCH-Rexroth. The laboratory has been brought into existence and is sponsored by BOSCH-Rexroth Ltd. and FESTO Didactic Ltd.
7
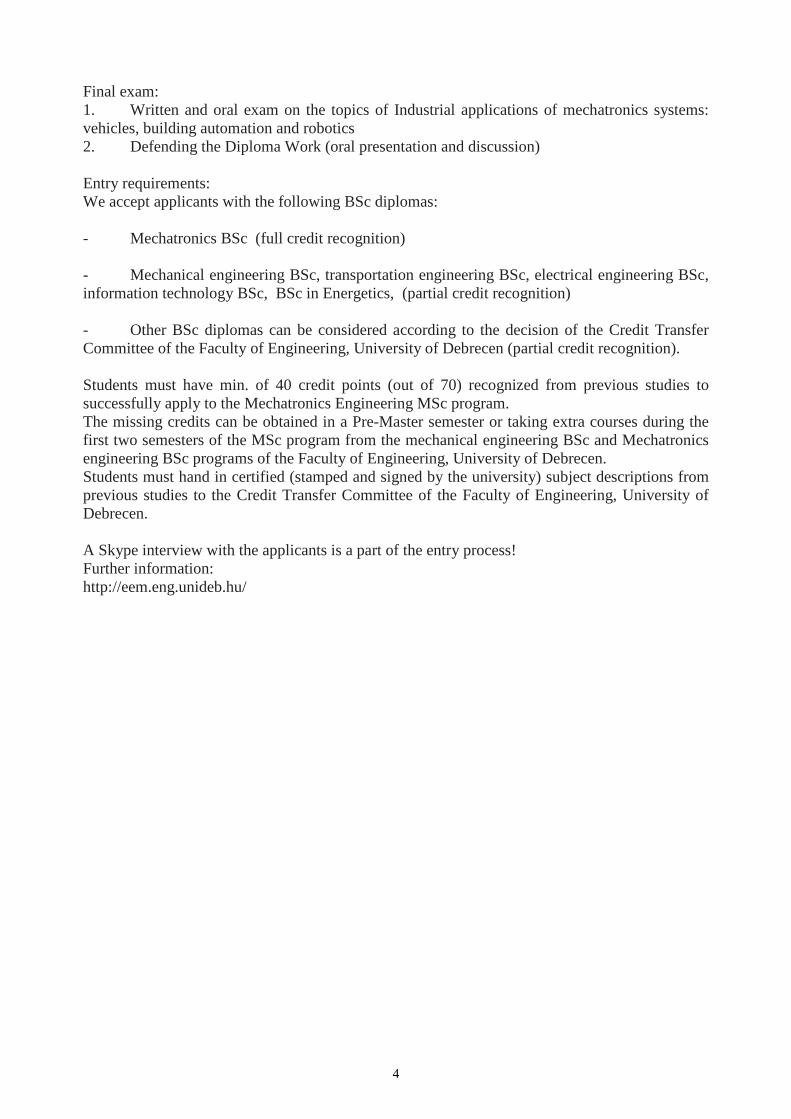
o Robotics laboratory: There are 16 workstations, in connection with robot technology, where 32 students can work simultaneously. In the 16 workstations there are altogether 16 robots, which are PLC controlled.
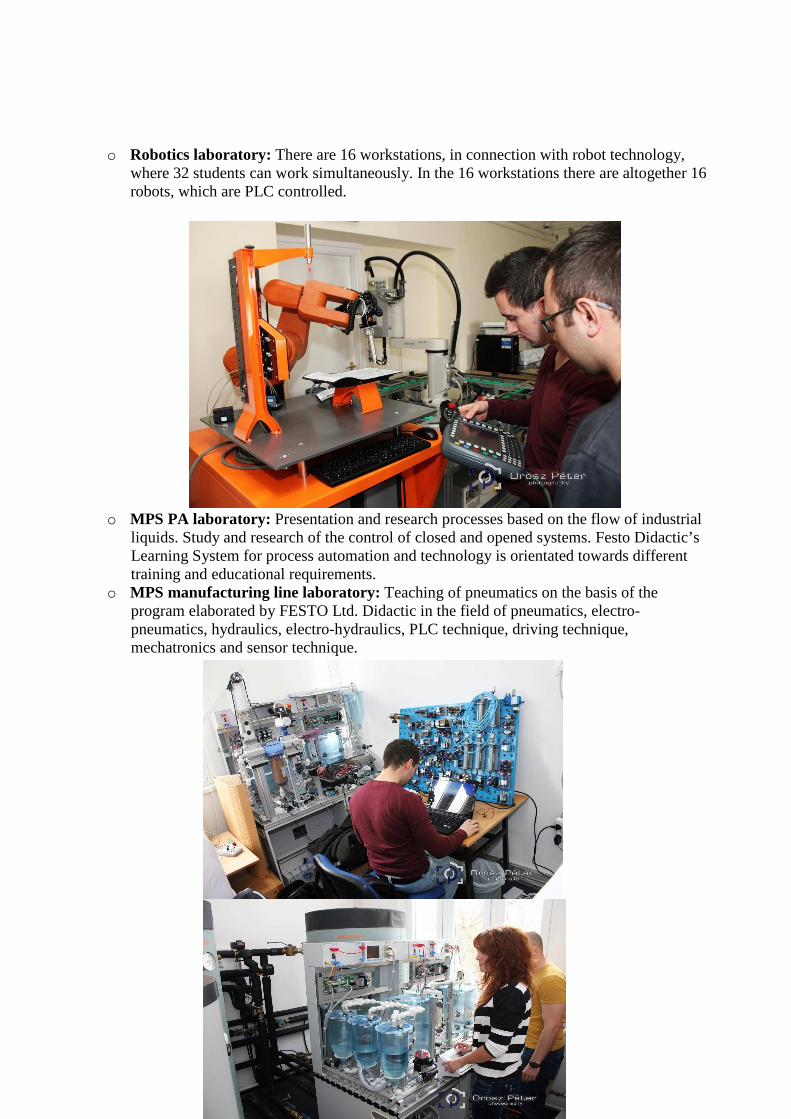
o MPS PA laboratory: Presentation and research processes based on the flow of industrial liquids. Study and research of the control of closed and opened systems. Festo Didactic’s Learning System for process automation and technology is orientated towards different training and educational requirements.
o MPS manufacturing line laboratory: Teaching of pneumatics on the basis of the program elaborated by FESTO Ltd. Didactic in the field of pneumatics, electro-pneumatics, hydraulics, electro-hydraulics, PLC technique, driving technique, mechatronics and sensor technique.

8
o NI Elvis (Educational Laboratory Virtual Instrument ation Suite) Lab:The NI Educational Laboratory Virtual Instrumentation Suite (NI ELVIS) features an integrated suite of 12 of the most commonly used instruments in the lab - including the oscilloscope, digital multimeter, function generator, variable power supply, and Bode analyzer - in a compact form factor for the lab or classroom demonstrations. Based on NI LabVIEW graphical system design software, NI ELVIS, with USB plug-and-play capabilities, offers the flexibility of virtual instrumentation and allows for quick and easy measurement acquisition and display.
o Laboratory of electronic engineering and electronics (Rohde & Schwarz reference lab):The main competence of the laboratory is the measuring of electric quantities in the field of mechatronics, mechanical engineering and chemical mechanical engineering by means of digital and analogue circuits. There are 10 measuring stations in the laboratory, at which 20 students can carry out measurements at the same time.

9
o Measurement and Control Engineering Laboratory: The following tools of cardinal
importance of the laboratory to promote the teaching and research activity: - storing oscilloscope - power-supply unit - digital manual instruments - plotter - function generator - data collection and signal conditioning unit
o Laboratory of re-configurable mechatronics controllers: The goal of the activity of the laboratory is the research and further development of intelligent controllers by using freely configurable digital electronic tools.
Students are welcomed to participate in the development and research work of the department’s electric vehicles.
10
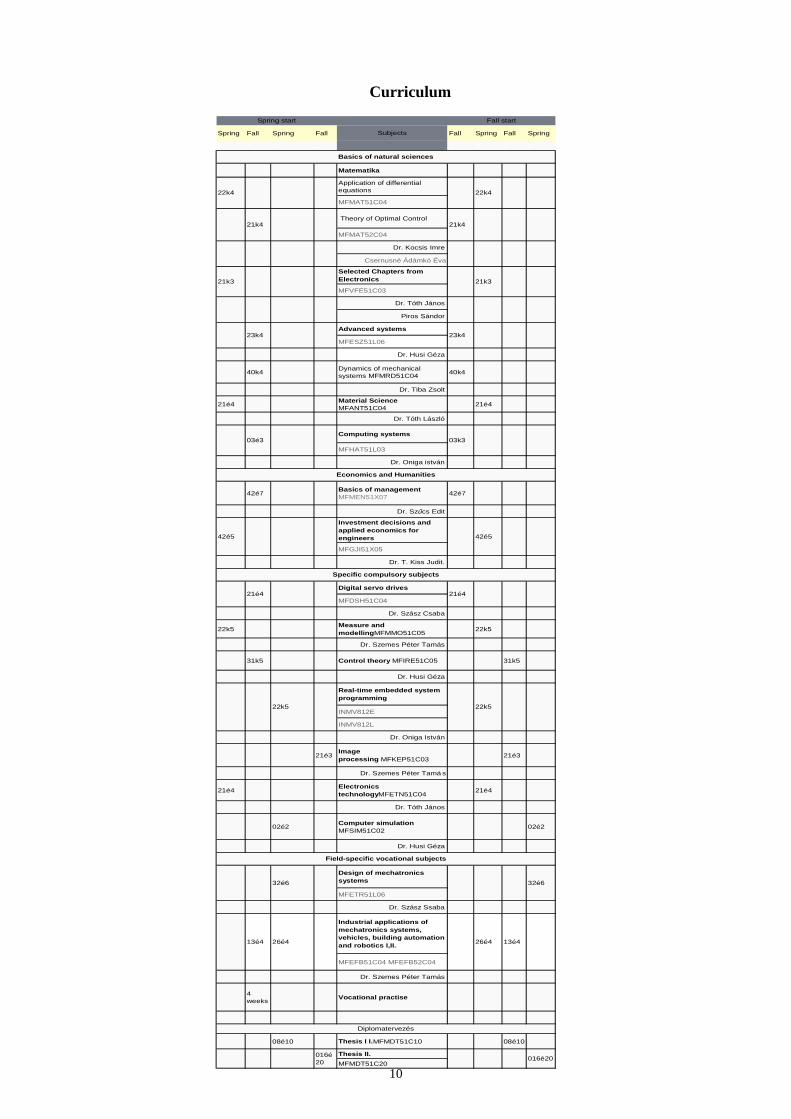
Curriculum
Spring Fall Spring Fall Fall Spring Fall Spring
B A D C A B C D
Matematika
Application of differential equations
MFMAT51C04
Theory of Optimal Control
MFMAT52C04
Dr. Kocsis Imre
Csernusné Ádámkó Éva
Selected Chapters from Electronics
MFVFE51C03
Dr. Tóth János
Piros Sándor
Advanced systems
MFESZ51L06
Dr. Husi Géza
40k4Dynamics of mechanical systems MFMRD51C04
40k4
Dr. Tiba Zsolt
21é4Material Science MFANT51C04
21é4
Dr. Tóth László
Computing systems
MFHAT51L03
Dr. Oniga istván
42é7Basics of management MFMEN51X07
42é7
Dr. Szűcs Edit
Investment decisions and applied economics for engineers
MFGJI51X05
Dr. T. Kiss Judit.
Digital servo drives
MFDSH51C04
Dr. Szász Csaba
22k5Measure and modellingMFMMO51C05
22k5
Dr. Szemes Péter Tamás
31k5 Control theory MFIRE51C05 31k5
Dr. Husi Géza
Real-time embedded system programming
INMV812E
INMV812L
Dr. Oniga István
21é3Image processing MFKEP51C03
21é3
Dr. Szemes Péter Tamá s
21é4Electronics technologyMFETN51C04
21é4
Dr. Tóth János
02é2Computer simulation MFSIM51C02
02é2
Dr. Husi Géza
Design of mechatronics systems
MFETR51L06
Dr. Szász Ssaba
Industrial applications of mechatronics systems, vehicles, building automation and robotics I,II.
MFEFB51C04 MFEFB52C04
Dr. Szemes Péter Tamás
4 weeks
Vocational practise
08é10 Thesis I I.MFMDT51C10 08é10
Thesis II.
MFMDT51C20
03é3
Diplomatervezés
Field-specific vocational subjects
42é542é5
03k3
13é4 26é4 26é4
Basics of natural sciences
Economics and Humanities
Specific compulsory subjects
32é6
21é4
22k5 22k5
016é20
13é4
21é4
016é20
32é6
23k4 23k4
21k3 21k3
21k4 21k4
Spring start
Subjects
Fall start
22k4 22k4
11
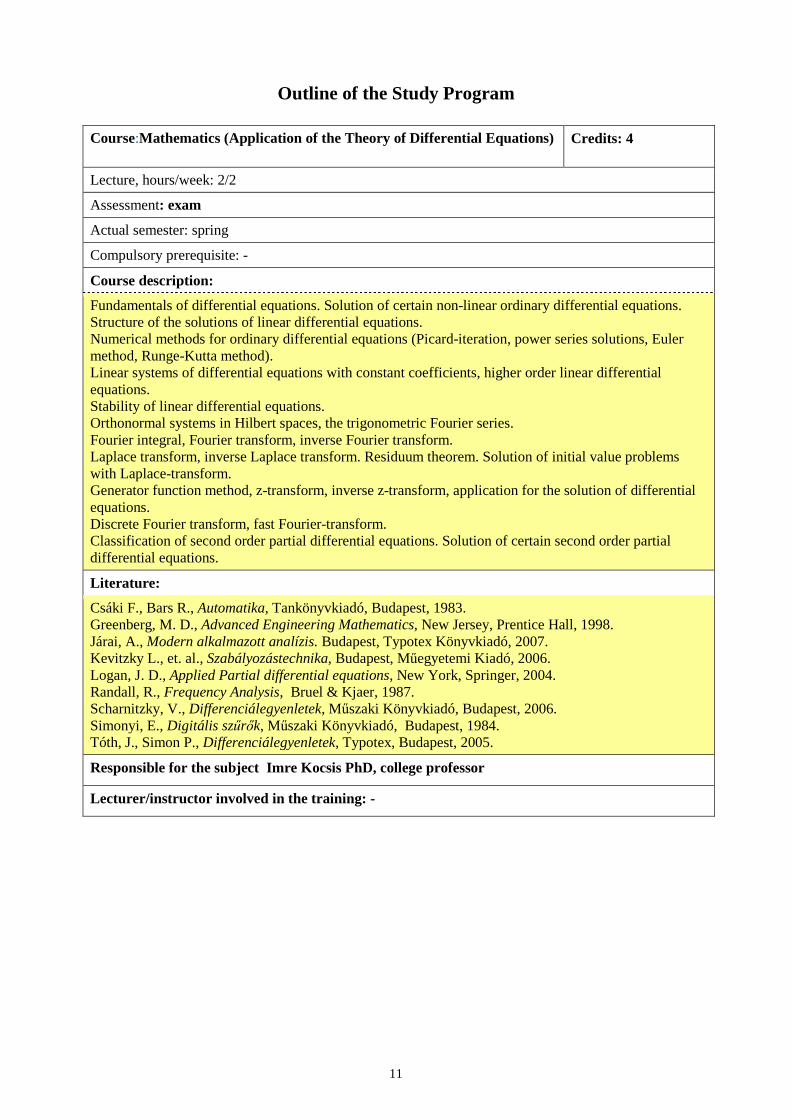
Outline of the Study Program
Course:Mathematics (Application of the Theory of Differential Equations)
Credits: 4
Lecture, hours/week: 2/2
Assessment: exam
Actual semester: spring
Compulsory prerequisite: -
Course description:
Fundamentals of differential equations. Solution of certain non-linear ordinary differential equations. Structure of the solutions of linear differential equations. Numerical methods for ordinary differential equations (Picard-iteration, power series solutions, Euler method, Runge-Kutta method). Linear systems of differential equations with constant coefficients, higher order linear differential equations. Stability of linear differential equations. Orthonormal systems in Hilbert spaces, the trigonometric Fourier series. Fourier integral, Fourier transform, inverse Fourier transform. Laplace transform, inverse Laplace transform. Residuum theorem. Solution of initial value problems with Laplace-transform. Generator function method, z-transform, inverse z-transform, application for the solution of differential equations. Discrete Fourier transform, fast Fourier-transform. Classification of second order partial differential equations. Solution of certain second order partial differential equations.
Literature:
Csáki F., Bars R., Automatika, Tankönyvkiadó, Budapest, 1983. Greenberg, M. D., Advanced Engineering Mathematics, New Jersey, Prentice Hall, 1998. Járai, A., Modern alkalmazott analízis. Budapest, Typotex Könyvkiadó, 2007. Kevitzky L., et. al., Szabályozástechnika, Budapest, Műegyetemi Kiadó, 2006. Logan, J. D., Applied Partial differential equations, New York, Springer, 2004. Randall, R., Frequency Analysis, Bruel & Kjaer, 1987. Scharnitzky, V., Differenciálegyenletek, Műszaki Könyvkiadó, Budapest, 2006. Simonyi, E., Digitális szűrők, Műszaki Könyvkiadó, Budapest, 1984. Tóth, J., Simon P., Differenciálegyenletek, Typotex, Budapest, 2005.
Responsible for the subject Imre Kocsis PhD, college professor
Lecturer/instructor involved in the training: -

12
Course: Mathematics (Theory of Optimal Control) Credits 4
Lecture, hours/week: 2/1
Assessment: exam
Actual semester: fall
Compulsory prerequisite: Mathematics (Differential Equations)
Course description:
Formulation of control models. General properties of linear systems: reachability, controllability, stabilizability, observability, detectability, reconstructibility. State variables, dynamic feedback, realization. Linear and quadratic optimal control with finite and infinite time horizon. Time-optimal control of linear systems. Non-linear control systems. Existence of optimal controls. Pontryagin's maximum principle. Dynamic programming.
Literature:
Sontag, E. D., Mathematical Control Theory, Springer, New York, 1998. Gyurkovics, É., Irányítási rendszerek, Budapest, Typotex, 2011. Gyurkovics, É., Irányításelmélet, Tankönyvkiadó, Budapest, 1991. Macki, J., Strauss, A., Introduction to Optimal control Theory, Springer, New York, 1982.
Responsible for the subject Imre Kocsis PhD, college professor
Lecturer/instructor involved in the training: - -
13
Course: Selected chapters from electrotechnics Credits: 3
Lecture, hours/week: 2/1
Assessment : exam
Actual semester:spring
Compulsory prerequisite: -
Course description:
Linear and non-linear systems. Semiconductor physics. Analogies. Non-linear elements. Periodic excitation. Transient phenomena. Sampling systems. Special electric magnetic materials, sensors. Analog electronic amplifiers, operational amplifiers and applications. Passive and active filters. Electronic units in controllers, process control. Principles and methods of telemetry. Micro-electromechanical systems. Circuit simulation methods. Laboratory and computer exercises help to promote understanding and mastery of the curriculum.
Literature:
A.I.E.E John Henderson: Electrotechnics, HardPress Publishing, 2012 János Tóth: Electrical Actuators, Course Book, University of Debrecen, 2012 David Crecraft, David Gorham: Electronics, 2003
Responsible for the subject : János TÓTH, PhD, associate professor
Lecturer/instructor involved in the training: -
14
Course: Advanced systems Credits:4
Lecture, hours/week: 2/3
Assessment: exam
Actual semester: fall
Compulsory prerequisite: -
Course description:
Basic concepts, mathematical description of physical phenomena. Definition of the real physical system. Definition of signa.l The inputs and outputs. The definition of the system Definitions of linear and non-linear systems Definition of parameter and variable Theory of distributed and concentrated parametric description Description of deterministic and stochastic systems Concept of causality Deterministic description with lumped parameters The concept of static systems The concept of dynamic systems General principles of dynamical systems, Linear, quantized, single in and output system, Linear, quantized, one input-output system, Generalized derivativeState, state variable, state equation Basic tasks, Solvability of the most important basic tasks, Complex tasks, The concept of stability State space representation, Variable structure systems, Basic methods of analysis, Mathematical methods to investigate SISO LTI systems, Investigation in time region (Dividing into components), Analysis in frequency domain Switch mode Examination of SISO LTI systems Transfer function ,Determining the transfer function with the help of the block diagram Block diagrams Application of transfer function Definition and analysis of stability Examples for analysis of stability in case of non-feedback systems The visualization of the frequency transfer function The lumped parameter model of the systems described by vector field Concentrated parameter systems described with vector field models SISO LTI classical control systems State space representation Complex design example including measurements Sliding Mode Control of an Uninterruptible Power Supply.
Literature:
Péter Korondi: Systems and control BME Géza Husi. Methatronics control systems. Course book ISBN 978-963-473-520-5 Debreceni Egyetem Laboratory handbook ISBN 978-963-473-521-2 Debreceni Egyetem Radu Cătălin Țarcă Advanced methatronics. Course book ISBN 978-963-473-508-3 Laboratory handbook ISBN 978-963-473-509-0 Debreceni Egyetem Clarence W. De Silva: Mechatronics: An Integrated Approach
Responsible for the subject: Géza Husi PhD, habil, associate professor
Lecturer/instructor involved in the training: -

15
Course: Dynamics of mechanical systems Credits: 4
Lecture, hours/week :4/0
Assessment:exam
Actual semester:fall
Compulsory prerequisite: -
Course description:
Kinematics, dynamics and kinematics and motioncurves, equations of motionmechanisms. Dynamicsystemsinmechatronics. Principle of virtualwork. D'Alembertprinciple. First and secondorder Lagrange equations. Canonicaltransformations. Hamilton-Jacobi equations. Anholonommechanicalsystems. Dynamics of robot manipulators and motionequations. DOF and solving of differentialequations of undamped and damped vibration systems. Longitudinal vibration of continuumbars. Rayleighquotientiteration, Stodola (convergence), Rayleigh's principle, Dunkerley's estimate. Longitudinal and torsionalvibrations of prismaticbars. The Sturm-Liouvilletask. Chaoticdynamics of stroboscopicimaging, topologicalentropy, Lyapunovexponent. Phasespace, trajectories. Hopf-bifurcationinmechanicalsystems. Computer simulations of dynamicsystems, SciLabapplications.Dynamicanalysis of robotics and simulation.
Literature:
1. Béda: Lengéstan, Műegyetemi Kiadó, 45 043
2. Csernák- Stépán: A műszaki rezgéstan alapjai. Műegyetemi Kiadó, 2012.
3. Tél- Gruiz: Kaotikus dinamika, Nemzeti Tankönyvkiadó, 2003.
4. Ludvig: Gépek dinamikája. Műszaki Könyvkiadó, 1986
5. Harold Josephs- Ronald J. Huston: Dynamics of mechanicalsystems. 5th Edition, CRC Press Inc.,
2002. ISBN 0-8439-0593-4
Responsible for the subject:Zsolt Tiba PhD, college professor
Lecturer/instructor involved in the training: -
16
Course title: Materials Science Credits:3
Lecture, hours/week:2/1
Assessment: mid-term grade
Actual semester: spring
Compulsory prerequisite: -
Course description:
Aim of the course presenting the latest achievements of materials science and technology of metals, polymers, ceramics and associated materials families. Metals, polymers, elastomers, ceramics specific properties and fields of it’s application. Preparation of intelligent high strength and high elastic materials provide background of the materials structure. Shape memory metals, alloys and gels. Nanostructured materials (particles, layers, preparation and properties of bulk materials). Preparation and properties of special composite materials. Advantages of application of hybrid components. Material selection criterias, Ashby's material selection principles, materials design and sizing. Recycling of materials.
3-5 The most important compulsory and recommended literature (notes, textbook) list of graphite data biblio (author, title, publication data, pages, ISBN)
1. Tisza, M: Metallográfia, Miskolci Egyetemi Kiadó,, 2011. 2. Bárczy, P: Anyagszerkezettan, 2. Kiadás, Miskolci Egyetemi Kiadó, 1998. 3. Shackelford, J. F.: Introduction to Materials Science for Engineers. 5th Edition, Prentice Hall Inc.,
2000. 4. Ashby, M.F, Jones, D.R.H.:Engineering Materials 1-An introduction to Microstructures,Processing
and Design 3rd Edition, Elsevier Butterwoth- heinemann, Oxford, 2006. 5. Callister, Jr. W. D.: Materails Scienece and Engineering, An Introduction , 3rd Edition, John Whiley
& Sons, Inc., USA, 1994
Lecturer (name, title, academic. degree):László Tóth, DSc, professor
Lecturer/instructor involved in the training: -

17
Course: Computing systems Credits:3
Lecture, hours/week: 0/3
Assessment: exam
Actual semester: fall
Compulsory prerequisite: -
Course description:
An overview of computer systems: components of the computer system. The concept of virtualization. Protocols and standards. The general concept of systems. It system architectures. Summary and review Data in the computer: number systems. Numbers as a physical representation. Counting in different bases. Performing arithmetic in different number bases. Numeric conversion between number bases Section 3.6. Hexadecimal numbers and arithmetic. A special conversion case—number bases that are related. Fractions. Mixed number conversions Data formats:general considerations. Alphanumeric character data. Image data. Audio data. Data compression. Page description languages. Internal computer data format Representing numerical data: unsigned binary and binary-coded decimal representations. Representations for signed integers. Real numbers. Programming considerations Computer architecture and hardware operation: he little man computer: layout of the little man computer, operation of the lmc. A simple program. An extended instruction set. The instruction cycle. A note regarding computer architectures The cpu and memory: introduction. The components of the cpu. The concept of registers. The memory unit. The fetch-execute instruction cycle. Buses. Classification of instructions. Instruction word formats. Instruction word requirements and constraints Cpu and memory: design, enhancement, and implementation. Cpu architectures. Cpu features and enhancements. Memory enhancements. The compleat modern superscalar cpu. Multiprocessing. A few comments on implementation Input/output: characteristics of typical i/o devices. Programmed i/o. Interrupts. Direct memory access. I/o modules Modern computer systems Computer peripherals
Literature:
Irv Englander: The Architecture of Computer Hardware, System Software, and Networking: An Information Technology Approach, Fourth Edition Publisher: John Wiley & Sons Pub. Date: May 4, 2009
Responsible for the subject: Géza Husi PhD, habil, associate professor
Lecturer/instructor involved in the training: -

18
Course: Basics of Management /Introduction to management Credits: 7
Lecture, hours/week: 4 /2
Assessment: mid-semester grade
Actual semester: fall
Compulsory prerequisite: -
Course description:
In the basics of lmanagement lesson students gain an insight into the key areas of leadership. During the course can introduced into the new management trends, such as the coaching authoritarian leadership, time- and energy management, and appointed the emotional intelligence. In the Framework of practical lessons is measured and analyzed the students’ leadership skills, emotional intelligence and their soft skills. Leadership: Lecture: Define leadership, role or personality to be a leader, soft skills. Practice: group work, situational task, discuss with Dispute method. Organization structures: Lecture: Matrix, Functional, Divisional, Line. Practice: SWOT analyze Management gurus: Lecture: Fayol, Taylor, Mintzberg, Porter, Weber, Mayo. Practice: Pest model. Functions of management: Lecture: Planning, Organising, Directing, Controlling, Innovation and Representation. Practice: Situational tasks in group work. Leadership theories: Lecture: Trait theory, Behavioural theories, The Contingencialist Leadership Models, Hersey and Blanchard. Practice: Tests, which measure, the leadership style. Leadership styles: Lecture: Autocratic, Bureaucratic, Laissez-faire, Democratic, Transformational leadership Practice: Tests, which measure, the leadership style, discuss the result. Leadership qualities: Lecture: Most important leadership skills and qualities, Generic leadership traits, What you have to know, What you need to do, How to turn the core leadership functions into skills. Practice: Tests, which measure, the leadership qualities, discuss the results. Time management, Energy management: Lecture: Taming Time, A Few Myths About Managing Your Time, Lining Up Your Ducks: Prioritize!, Knowing Your Time Management Style, How You Relate to Time. Practice: Techniques to manage the time and energy. Problem-solving: Lecture: what is problem? How can solve it? Practice: Why-why analyse, 80/20 theory, fishbone diagram. Work Performance: Lecture: determine work performance, analyze the problems, find solution Practice: Tests, which measure the Work Performance,, discuss the results. Emotional Intelligence: Lecture: determine emotional intelligence, highlight the EM’S role and effect in the leadership. Practice: Tests, which measure the Emotional Intelligence, discuss the results. Work style and work environment in the context of leadership style: Lecture: work style, work environment, how to influence the leader the work style and the environment. Practice: Tests, which measure the work style and the work environment, discuss the results. Coaching: Lecture: define wha a coach is, tasks of a coach, the coaching authoritarian leadership. Practice: Case studies. Stress caused by leadership: Lecture: signs of stress, recognizing symptoms. Practice: stress tests.
Literature:
Gordon, T. (2001): Leader Effectiveness Training, New York, Widden Books Schwart, T – Loehr, J. (2005): The Power of Full Engagement: Managing Energy, Not Time, Is the Key to High Performance and Personal Renewal, New York, Free Press Mancini, M. (2003): Time management, New York, McGraw-Hill Companies Taylor, J. (2012): Decision Management System, IBM Press, USA
Responsible for the subject: Edit Szűcs PhD habil, college professor
Lecturer/instructor involved in the training: -

19
Course: Investment decisions and applied economics for engineers Credits 5
Lecture, hours/week: 4/2
Assessment: mid-semester grade
Actual semester: spring
Compulsory prerequisite: -
Course description:
This course is intended to introduce students to the main concepts and theories about economics, investment analysis and business/corporate performance measurement so that students are able to make comparative analysis. By the end of the course, the student should be able to use the basic tools and models of investment analysis, and apply them in solving problems. The course focuses on the theory and application of the following: The time value of money. Calculating future value and present value. Real and nominal rates of interest. Discounted cash flow analysis. Net present value rule. Compound interest and present value. Future and present value of an annuity/annual payment. Growing annuities. Calculating the internal rate of return (IRR). Valuing bonds (duration, bond volatility). The value of common stocks. Making investment decision with the net present value rule. Profitability index. Equivalent annual cost. Financial planning (Costs, short-term financing, break-even analysis, cost accounting). Investment – externalities. Project analysis. Making business plan. Scarce resources. Resources and competences. General economic and social environment, sustainable development, corporate social responsibility, performance measurement. Economic and environmental performance indicators, Balanced Scorecard System.
Literature:
Required literature: 1. Brealey, R. A. - Myers, S. C. – Allen, F (2011): Principles of Corporate Finances. McGraw-
Hill/Irwin, 2011. ISBN: 0077356381, 9780077356385 Recommended literature: 2. Scott Besley - Eugene F. Brigham (2011): Principles of Finance. Cengage Learning, 2011 (South
Western). ISBN: 1111527369, 9781111527365 3. James C. Van Horne - John M Wachowicz, Jr. (2005): Fundamentals of Financial Management.
Pearson education, 2005. ISBN: 0273685988, 9780273685982 4. Correia, C. – Flynn, D. K. - Besley – Ulian, E. – Wormald, M. (2012): Financial Management.
6th edition. Juta and Company Ltd. ISBN: 0702171573, 9780702171574. 5. Khan – Jain (2007): Financial Management. Tata McGraw-Hill Education, 2007. 5th edition.
ISBN: 0070656142, 9780070656147
Responsible for the subject: Judit T. Kiss PhD, college associate professor
Lecturer/instructor involved in the training: -

20
Course: Digial Servo Drives Credits: 4
Lecture, hours/week: 2/1
Assessment : mid-term grade
Actual semester: fall
Compulsory prerequisite: -
Course description:
Summary: Special type electrical machines in machatronic applications. Signals sampling and sampling digital control system architectures. Fourier transform. Z plane transform. Stability in z plane. Open- and closed-loop response in z plane. DC motors-based digital servo-control systems. The Park vector. The basics of the ac machines vector control theory. Induction motors-based digital servo-control systems. Synchronous motors-based digital servo-control systems. Modeling and simulation of servo-control systems. Measurement of the DSP control-based dc. induction and synchronous motor driven servo-systems. Basics of the robot controls. The Denavit-Hartenberg convention. Robot servo-control systems. Competences: Design and modeling of digital servo-control systems. Design and utilization of servomotors. Design and implementation of sampling digital control systems. Industrial application of servo-control systems.
Literature:
[1] Szász Csaba – Digital control systems, U.T. PRES Cluj, 2011, ISBN 978-973-662-612-8. [2] Burns R.S. – Advanced control engineering, Butterworth Heinemann, Oxford, 2001. [3] Dorf R.C., Bishop R.H. – Modern control systems, Prentice Hall, New Jersey, 2001. [4] Katsuhito O. – Modern control engineering, Prentice Hall, New Jersey, 1997. [5] Coughanowr D.R. – Process systems analysis and control, 2nd Edition, Mc. Graw Hill, 1991.
Responsible for the subject: Csaba Szász PhD, associate professor
Lecturer/instructor involved in the training: -

21
Course: Measure and modelling Credit: 5
Lecture, hours/week: 2/2
Assessment: exam
Actual semester:spring
Compulsory prerequisite: -
Course description:
Knowledge: Measurement theory and practice. Sensors and sensor array in data acquisition and processing system. Sensor manufacturing technology: MEMS, MEOMS. Sensor coupling and amplifier circuits. Noise supression, noise rejection filtering circuits. Abstraction levels of model building and identification. Digital signal processing. Digital simulation and data modelling. Competences: Measurement and modelling methods. Simulation systems and softwares. State space method. Time and frequency domain analytic methods. Simulation of linear and nonlinear systems.
Literature
Richard D. Dorf, Robert H. Bishop, „Modern Control Sytems (12th edition)” ISBN-13: 978-0136024583 John C. Doyle, Bruce A. Francis, Allen R. Tannenbaum, „Feedback Control Theory (Dover Books on Electrical Engineering)” ISBN-13: 978-0486469331 Stephen L. Campbell, Jean-Philippe Chancelier, and Ramine Nikoukhah „Modeling and Simulation in Scilab/Scicos”, ISBN 0-387-27802-8
Responsible for the subject: Péter T. Szemes PhD, associate profesor
Lecturer/instructor involved in the training: -
22
Course: Control theory Credit: 5
Lecture, hours/week:3/1
Assessment: exam
Actual semester:fall
Compulsory prerequisite: -
Course description:
Planning of sampling one input- one output (SISO) regulations. Bilinear planning with transformation. Two freedom degrees regulation. Smith predictor. State - space methods. Control and observation. Pole transfer with state feedback, state observation planning. Non-linear and optimal management systems. Ljapunov stability, Ljapunov’ s direct and indirect method. Static and dynamic optimum, maximum principle, optimum searching procedures. Optimal management according to quadratic criterion, LQ and LQG task, Kalman filter. Adaptive and predictive managements. Lineal parameter estimation, predictor with k-step. Discreet system models, identification methods. MIMO self-tuning adaptive control. Model predictive control. Fuzzy regulations. Fuzzy set, relation, inference, defuzzification. TSK- fuzzy system. Knowledge-based Fuzzy regulators. Neural systems. Artificial neuron, multilayer networks, teaching, backpropagation. Adaptive network based fuzzy inductive systems (ANFIS).
Literature
Géza Husi : Methatronics control systems. Course book Debreceni Egyetem ISBN 978-963-473-520-5 Géza Husi : Methatronics control systems. Laboratory handbook Debreceni Egyetem ISBN 978-963-473-521-2 Béla Lantos: Irányítási rendszerek elmélete és tervezése II. Korszerű szabályozási rendszerek. Akadémiai Kiadó, 2003, ISBN 963 05 7922 7 Béla Lantos: Fuzzy Systems and Genetic Algorithms. Műegyetemi Kiadó, 2002. ISBN 963 420 706 5T. Kailath: Linear systems, Prentice-Hall, 1980 B. C. Kuo, F. Golnaraghi: Automatic control systems, John Wiley & Sons, Inc., 2003 Béla Lantos: Irányítási rendszerek elmélete és tervezése I. Egyváltozós szabályozások. Akadémiai Kiadó, 2. kiadás, 2005, ISBN 963 05 8249 X.
Responsible of a subject : Géza Husi, habil, PhD. associate professor
Lecturer/instructor involved in the training: -

23
Course Real-time embedded systems and their programming Credit5
Lecture, hours/week 2/2
Assessment :exam
Actual semester:spring
Compulsory prerequisite:-
Course description:
Architecture and fields of application of embedded systems (computer-based autonomous systems). Sensors: presenting operating principle and signal conditioning of some typical sensors: sensing movement, rotation, force, pressure, temperature, flow intensity, light intensity, fluid level ad the corresponding signal conditioning devices. Integrated sensor, signal conditioner and remote transmitter devices. Modern signal converters: Basics of digital signal processing, interpolating and decimating filters. A/D converters (Flash, successive approximation, Dual slope, subranging, pipelined subranging, bit-per-stage, Sigma-Delta). Characteristics of A/D converters, static and dynamic errors. D/A converters (Strig, R-2R ladder, segmented, Sigma-Delta). Transients at code change. Digital signal synthesis (DDS). Interpolating and decimating. Digital signal processing units: general purpose processors, microcontrollers, architecture and typical peripherals of digital signal processors (DSP). Communication in embedded systems, communication of the main functional units. Fitting sensors in the system. Standard hardware and software tools for communication. Buses I2C and CAN. Integrated intelligennt sensors (IEEE 1451).
Literature:
• Craig Hollabaugh: Embedded Linux(R): Hardware, Software, and Interfacing • Sreekrishnan Venkateswaran: Essential Linux Device Drivers (Prentice Hall Open Source
Software Development Series) • Walter Oney: Programming the Microsoft Windows Driver Model, Second Edition • Ljubisa Ristic (ed.): Sensor Technology and Devices. Artech House. Boston-London, 1994. • G. van der Horn, J.L., Huijsing: Integrated Smart Sensors. Design and Calibration. Kluwer
Academic Publishers. Boston-Dordrecht-London, 1998. • E. Schrüfer: Elektrische Messtechnik. Carl Hanser Verlag, München-Wien, 1992. • Analog Devices: Practical Design Techniques for Sensor Signal Conditioning, 1999. • James K. Peckol: Embedded Systems: A Contemporary Design Tool. ISBN 978-0-471-
72180-2 Wiley, 2008 • Ed Lipiansky: Embedded Systems Hardware for Software Engineers. ISBN 978-0-07-
163948-4 McGraw Hill, 2012.
Responsible for the subject: János Végh Dsc, professor
Lecturer/instructor involved in the training:-

24
Course: Image Processing Credit: 3
Lecture, hours/week 2/1
Assessment : mid-term grade
Actual semester:fall
Compulsory prerequisite: -
Course description:
Knowledge: Fundamentals of human and machine vision. Camera modells and geometry transformations. Image formats and matrixes. Binary image processing. Image filtering in spatial and space domain. Hystogram and segmentation. Indexing, tagging and annotation. Pattern and object recognition. Face detection. Competences: Image capture, storage, ans indexing. Image and video formats. Indexing and metadata.
Literature:
Rafael Gonzalez, Richard Woods: „Digital Image Processing”. ISBN-10: 0201180758 ISBN-13: 978-0201180756
Responsible for the subject: Péter T. Szemes PhD, associate profesor
Lecturer/instructor involved in the training:-

25
Course: Electronic technology Credits: 4
Lecture, hours/week:2/1
Assessment : mid-term grade
Actual semester:spring
Compulsory prerequisite: -
Course description:
The structuring of electronic technology products, application possibilities of components, integrated circuits, mounting plates, module circuits and devices. The technology of microelectronics devices and components. Technologies of circuit module mounting plates (and its carriers). Printed circuit boards and circuit technology. Production of integrated carriers with passive elements. Circuit module assembly technology. Insertion, soldering, inspection. The structure and application of combined (optoelectronics, mechatronics, etc.) modules. Device construction principles. Syllabus of laboratory exercises: Printed circuit board technology. Thin-film technology, vacuum deposition and offset lithographic pattern making. Production and installation of thick-film technology, polymer thick film circuits. Surface mounting technology. Screen printing, insertion, reflow soldering. Through Hole technology. Selective laser soldering. Optical, X-ray and functional examination of mounted modules on PCBs.
Literature:
John Hiley, Keith Brown, Ian McKenzie Smith: Hughes Electrical and Electronic Technology 10th, Pearson Education Limited, 2008 Neil Sclater: Electronic Technology Handbook, McGraw-Hill Professional, 1999 BME-ETT: Virtual Laboratory Support for Packaging Education, 2000
Responsible for the subject : János TÓTH, PhD, associate professor
Lecturer/instructor involved in the training: -

26
Course: Computer Simulation Credit: 2
Lecture, hours/week :0/2
Assessment : mid-term grade
Actual semester:spring
Compulsory prerequisite: -
Course description:
Task of the simulation, overview, sample examples. Digital simulation of constant systems; Instructing-oriented and block oriented construction of systems. Description of constant and sampling systems; Block oriented types of the general computational blocks of simulation systems; Realization of integration formulae, bindings, data flow programming (computation order); simulation of big time constant difference (stiff systems); Types and tasks of the simulation of discreet events; Generalized simulation basic elements: source, buffer, time delaying element, swallower type element; discreet event steps for simulation model's construction; Definition of discreet event of simulation models' running time, style. Optimization of the parameters of technical systems; search of the parameters of technical systems in a structure (identification);
Literature:
Géza Husi: Methatronics control systems. Course book Debreceni Egyetem ISBN ISBN 978-963-473-520-5 Géza Husi:Methatronics control systems. Laboratory handbook Debreceni Egyetem ISBN 978-963-473-521-2 Florin Sandu Blaga: Modelling and simulation of methatronics systems. Course book Debreceni Egyetem ISBN 978-963-473-516-8 Florin Sandu Blaga: Modelling and simulation of methatronics systems. Laboratory handbook Debreceni Egyetem ISBN 978-963-473-517-5 Dr. Schnell László (főszerk.): Jelek és rendszerek méréstechnikája. Műszaki Könyvkiadó, Budapest, 1985. Jegyzetforma: Dr. Schnell László (főszerk.): Jelek és rendszerek méréstechnikája I. és III. kötet (51435, 514352, régen J5-1435, J5-1435/b) Ljubisa Ristic (ed.): Sensor Technology and Devices. Artech House. Boston-London, 1994. G. van der Horn, J.L., Huijsing: Integrated Smart Sensors. Design and Calibration. Kluwer Academic Publishers. Boston-Dordrecht-London, 1998. E. Schrüfer: Elektrische Messtechnik. Carl Hanser Verlag, München-Wien, 1992. Analog Devices: Practical Design Techniques for Sensor Signal Conditioning, 1999.
Responsible for the subject Géza Husi, habil, PhD.associate professor
Lecturer/instructor involved in the training: -

27
Course: Design of Mechatronic Systems Credits: 4
Lecture, hours/week: 2/1
Assessment : mid-term grade
Actual semester: spring
Compulsory prerequisite: -
Course description:
Summary: Mechatronic systems classification. Mechatronic system architectures. Modeling and simulation of mechatronic systems. Mechatronic system’s actuators. Electrical machines for mechatronic applications. Power electronic converters design and development for mechatronic systems. Current source and voltage source PWM converters design. Sensors interfacing to mechatronic systems. Data acquisition systems design and implementation for mechatronic systems. Mechatronis systems programming. Driver and interface programs development for mechatronic systems. Dynamic performances evaluation of mechatronic systems. Mechatronic systems industrial applications. Competences: Design and modeling of mechatronic systems. Design and development strategies of mechatronic systems. Implementation and experimentation ofmechatronic systems. Industrial application of mechatronic systems.
Literature:
[1] K. Janschek – Mechatronics systems (Methods, Models, Concepts), Springer Verlag, 2012, ISBN: 978-3-642-17531-2. [2] D. Shetty, R. Kolk – Mechatronics systems design, Second Edition, ISBN-10: 143906198x, 2010. [3] D. Karnop, D. Margolis, R. Rosenberg – System dynamics: Modeling, simulation, and control of
mechatronic systems, John Wiley and sons. 2012, ISBN-10: 047088908x. [4] Szász Csaba. – Stepping motor control systems, U.T. PRES, Cluj, 2004, ISBN 973-662-104-9. [5] Szász Csaba.. – Digital control systems- Applications U.T. PRES, Cluj, 2006, ISBN (10) 973-662-
274-6.
Responsible for the subject :Géza Husi PhD. habil, associate professor
Lecturer/instructor involved in the training: -

28
Course: Industrial applications of mechatronics systems: vehicles, building automation and robotics I.
Credits: 4
Lecture, hours/week: 2/6
Assessment: mid-term grade
Actual semester: spring
Compulsory prerequisite: -
Course description:
Knowledge: Mechatronics System introduction. System analysis, performance and behaviors. Mechatronics in industrila and consumer products. Overview of application areas: vehicles, buildings and robotics. Vehicles as a mobile machine with intelligence. Vehicle dynamics and control. Cars, trucks, boats and aircrafts. Intelligent functions and behaviors: senzors, decision making and actuation. Telemetry of vehicles: internal combustion engine, electric driven. Data clustering, analysis and visualisation. Competence: Modelling of vehicle dynamics. Control system design. Data acquitision and analysis for vehicles. Building Automation: Knowledge: Introduction, Building automation and information management Application areas and use cases of building automation Sensors, actuators, field controllers and field networks Electrical power distribution for building automation, cables, networks and protection circuits Security (alarm and access control) systems: technology, application and networks Fire safety systems: sensors, cabling and centers Communication: field networks, LAN, WAN. Wired and wireless solutions. Building Energy Management Competence: Design and operation of building automation systems, from sensor-actuator level to databases and reporting Programming and report generation of Building Management Systems
Literature:
• Fundamentals of Vehicle Dynamics (R114), Thomas D. Gillespie, ISBN-13: 978-1560911999
• Vehicle Dynamics, Stability, and Control, Second Edition (Dekker Mechanical Engineering) Hardcover, Dean Karnopp, ISBN-13: 978-1466560857
• • System Dynamics: Modeling, Simulation, and Control of Mechatronic Systems Hardcover
Dean C. Karnopp, Donald L. Margolis, Ronald C. Rosenberg, ISBN-13: 978-0470889084 • In Partnership with NJATC, „Building Automation: Control Devices and Applications”,
ISBN-13: 978-0826920003 • In Partnership with NJATC, „Building Automation Integration with Open Protocols”, ISBN-
13: 978-0826920126 • Energy Management Handbook, Eighth Edition by Steve Doty and Wayne C. Turner, ISBN-
13: 978-1466578289
Responsible for the subject: Péter T. Szemes PhD, associate professor

29
Course: Industrial applications of mechatronics systems: vehicles, building automation and robotics II.
Credits: 4
Lecture, hours/week: 1/3
Assessment: mid-term grade
Actual semester: fall
Compulsory prerequisite: -
Course description:
Robotics: Knowledge Robot software frameworks: Introduction and architecture: server-client architecture, message passing, access control, drivers for sensors and actuators, simulators, Advanced sensor systems: Vision systems: Cameras, cooperation of multiple cameras, IR cameras. Laser scanners: point cloud processing. Dynamic environment: Decision and reasoning: behaviour based architectures, neural networks, fuzzy logic. Classifications: unsupervised classification as sensor data filtering Cognitive info-communication: “Think like human, act like robot.” Implementation of human decision making and perception in robots. Special purpose robots: Mobile robots (FESTO Robotino), legged robots, UAV (Unmanned Aerial Vehicles), UGV (Unmanned Ground Vehicles), intelligent vehicle systems. Robots in Intelligent Space. Competence: Robot framework applications: motion control, navigation and mapping, decision making, task planning, Human-Machine communication, Examples: ROS (Robot Operating System), OROCOS (Open Robot Control Software) Image processing: object recognition, human tracking
Literature:
• Understanding Intelligence (Bradford Books), Rolf Pfeifer, Christian Scheier, 2001, 720 pages, ISBN-10: 026266125X (Only the relevant chapters.)
• ROS by Example, Patric R. Goebel, 246 pages, 2012
Responsible for the subject: Péter T. Szemes PhD, associate professor
Lecturer/instructor involved in the training: -

30
Available facilities and infrastructure The available capacity of the educational rooms on the faculty given by the accreditation data:
o 18 classrooms and drawing-rooms for practicing purposes (each with a seating-room of 16-70, altogether 958 seats, measures 1270 m2)
o 14 auditoriums (each with a seating-room of 78-256, altogether 961 seats, measures 996 m2)
o Number of full-time students fixed in the operating license: 2450. Current number of students: approximately 2300.
Laboratories and tutorial workshops at the Faculty of Engineering involved in the training:
o LEGO MINDSTORM teaching room: Thanks for LEGO Hungary, 8 pieces of LEGO MINDSTORM robots are available for teaching the basics of the robot actuation and sensing technologies.
o SKF, diagnostics lab: manual OIlCHECK equipment, CMVP type 10 vibrometer pen, CMVP type 30 SEE pen, shock impulse analyzer with PRO32-2 and PRO46-2 software, Testo 816 type acoustimeter, infrared distance thermometer, UNIBALANCE 4 type balancing equipment, informatics background
o Machine repairing lab: hand tools, turning lathe, Castolin ROTOTEC type flame spraying pistol, EUTALLOY Super Jet type flame spraying pistol, column-type drilling machine.
o Measuring lab: caliper gauge, micrometer caliper gauge, base tangent length micrometer, optical dividing head,
o Mechanical technology lab: tensile-testing machine, ZD 20 type hardness tester, impact-tester, Brinell microscope, fatigue-testing machine
o Material testing laboratory: OLYMPUS GX41, NEOPHOT-2 and EPIGNOST-2 type metall microscopes.
o X-Ray lab: MXR type equipment, Liliput type radiation source, VA-J-15 type radiation-measuring assembly, densitometer, processing gauge, radiographic materials testing, magnetic crack detection, ultrasonic testing, liquid-penetrant testing.
o Welding workshop: 8 gas welder workstations, 6 manual arc welding workstations, 3 consumable-electrode welding workstations, 3 argon-shielded tungsten-arc welding workstations
o Machine element lab: oscilloscope, photo elastic bench, Spider 8 amplifier, DMC 9012 amplifier, CATMAN evaluating software, force transducer, torque transducer, inductive displacement transmitter, test pads
o Machining shop: 5 pieces of machine lathe, 2 pieces of milling machine, gear-cutting machines, generating milling cutters, centre grinder, web-framed cross-cut saw, EMCO PC Mill type CNC drilling machine, CKE 6136i type CNC turning machine.

31
IT, Teaching technology and library supply etc.
o 3 IT laboratories, 30 people capacity each for teaching graphics and CAD. o The Faculty library is a unit of the University and National Library of Debrecen
University. The Library lays special emphasis on the extension of its electronic services. Most units of the Library have worked with the integrated library system of Corvina (former Voyager) since 1992. The Library lays special emphasis on collecting modern information carriers beside the traditional printed documents. Either by being a member of national consortiums or by local subscription the library ensures the citizens of the University to be able to search in the bibliographic and full-text databases of the most important scientific periodicals of each discipline (EBSCO, WEB of Science, Elsevier periodicals, Biological Abstract, PsycINFO, Jstor etc.) It collects processes and services the specialized literature of the taught and researched fields of the sciences. It stores about 40,000 specialized books, textbooks and notes, 140 Hungarian and 25 foreign specialized journals, thousands of standards, extra materials for teaching and planning, product catalogues and brochures.
Useful services: o Supplied learning tools (course books and notes, technical books in Hungarian and in
English) o Copy shop o Free wireless internet access in the Faculty buildings including the dormitory.
Administration: o Via the Education Office at the Faculty
Benefits: o Good relations with companies, system of production practice. o Industry-originated final projects.