universidade do estado de santa caarinat centro de...
TRANSCRIPT

UNIVERSIDADE DO ESTADO DE SANTA CATARINA
CENTRO DE CIÊNCIAS TECNOLÓGICAS - CCT
CURSO DE LICENCIATURA EM MATEMÁTICA
JONATHAN SARDO
PERTURBAÇÃO SINGULAR EM SISTEMAS NÃO-CONSERVATIVOS
COM COMPUTAÇÃO SIMBÓLICA
JOINVILLE - SC
2013

JONATHAN SARDO
PERTURBAÇÃO SINGULAR EM SISTEMAS NÃO-CONSERVATIVOS
COM COMPUTAÇÃO SIMBÓLICA
Trabalho de Graduação apresentado ao Cursode Licenciatura em Matemática do Centrode Ciências Tecnológicas, da Universidadedo Estado de Santa Catarina, como requisitoparcial para a obtenção do grau de Licenciaturaem Matemática.
Orientador: Prof. Fernando Deeke Sasse
JOINVILLE - SC
2013
S244p
Sardo, JonathanPerturbação Singular em Sistemas Não-Conservativos com
Computação Simbólica / Jonathan Sardo - 2013.94 p.: il
Bibliogra�a: f. 88-89Trabalho de Conclusão de Curso (Graduação) - Universi-
dade do Estado de Santa Catarina, Centro de Ciências Tec-nológicas, Curso de Licenciatura em Matemática. Joinville,2012.
Orientador: Fernando Deeke Sasse
1. Método Perturbativo 2. Computação Simbólica 3.Equações Diferenciais I. Sasse, Fernando Deeke. II. Univer-sidade do Estado de Santa Catarina - Curso de Licenciaturaem Matemática. III. Estudo de Perturbações Assintóticascom auxílio de Computação Simbólica.
CDD: 515.35
2

JONATHAN SARDO
PERTURBAÇÃO SINGULAR EM SISTEMAS NÃO-CONSERVATIVOS
COM COMPUTAÇÃO SIMBÓLICA
Trabalho de Graduação apresentado ao Curso de Licenciatura em Matemática do Centro
de Ciências Tecnológicas, da Universidade do Estado de Santa Catarina, como requisito
parcial para a obtenção do grau de Licenciatura em Matemática.
Banca Examinadora
Orientador:Prof. Fernando Deeke SasseUniversidade do Estado de Santa Catarina
Membro:Prof. Dr. Rogério de AguiarUniversidade do Estado de Santa Catarina
Membro:Prof. Dr. Edgard Pacheco Moreira AmorimUniversidade do Estado de Santa Catarina
Joinville, 28 de Junho de 2013.

À família.

AGRADECIMENTOS
Agradeço à família e aos amigos próximos pelos momentos de descontração e alegria
que me proporcionaram durante toda a graduação e principalmente aos meus pais e irmã,
que me auxiliaram e me apoiaram incondicionalmente neste período.
Fica, também, a gratidão aos companheiros de banda e coral, que permitiram durante
o curso, inesquecíveis alegrias e um refúgio da mente em momentos de estresse.
Agradeço ao professor Fernando Deeke Sasse, pela oportunidade, paciência e apoio,
mostrando-me uma interessante área de estudo, pouco difundida na graduação.
Em especial, agradeço a Camila Flávia do Carmo, que incentivou, apoiou e esteve ao
meu lado durante toda esta etapa da minha vida.
Inteligência é a capacidade de se adaptar à mu-dança.
Stephen Hawking

RESUMO
SARDO, Jonathan. Perturbação Singular em Sistemas Não-Conservativos comComputação Simbólica . 2013. nopag p.. Trabalho de Conclusão de Curso (Graduaçãoem Licenciatura em Matemática) - Universidade do Estado de Santa Catarina, Joinville,2012.
Grande parte dos problemas físicos com os quais se deparam engenheiros, físicos e ma-temáticos aplicados hoje, são problemas cujas soluções exatas analíticas não existem ouquando existem, possuem termos de funções especiais as quais possuem formas excessi-vamente complicadas de se obter fácil interpretação física. Deste modo, somos forçados arecorrer a aproximações, soluções numéricas ou combinação de ambos. Uma aproximaçãoprecisa para a solução de um problema modelado, é aquela em que o erro cometido écontrolável, podendo ser diminuído por meio de estratégias numéricas ou computacionais.Assim, este trabalho apresenta os conceitos e ferramentas necessários para o desenvol-vimento de aproximações assintóticas para solução de equações algébricas e diferenciaisatravés de métodos de perturbação, onde a perturbação em geral ocorre em um parâme-tro presente na equação, que associa-se ao erro da aproximação, e foi desenvolvido com oauxílio de computação simbólica, em particular com o uso do software Maple.
Palavras-chave: Métodos Perturbativos, Aproximação Assintótica, Computação Sim-bólica

ABSTRACT
SARDO, Jonathan. Singular Perturbation on Non-Conservative Systems withSymbolic Computation. 2012. 110 p.. Work of Course Conclusion (Graduate Degreein Mathematics) - Santa Catarina State University, 2012.
Most of the physical problems facing engineers, physicists, and applied mathematicianstoday, are problems that do not have exact analytical solutions or if these solutions exist,they have terms of special functions which are excessively complicated to get easy physicalinterpretation. Thus, we are forced to resort to approximations, numerical solutions, orcombinations of both. An accurate approximation to the solution of a problem, is onein which the error is controllable and can be reduced through numerical and computati-onal strategies. This work presents the concepts and tools required for the developmentof asymptotic approximations to solve algebraic and di�erential equations via perturba-tion methods, where the disturbance usually occurs on parameter of the equation, whichwe associate the error of approximation, and was developed with assistance of symboliccomputation, in particular using the software Maple.
Key-words: Perturbation Methods, Asymptotic Approximation, Symbolic Computation

LISTA DE ILUSTRAÇÕES
1.1 Método de Frobenius - Aproximação para 6 termos . . . . . . . . . . . . . . . . 25
1.2 Método de Frobenius - Aproximação para 10 termos . . . . . . . . . . . . . . . 25
2.1 Comparação entre a raiz exata e aproximada para 0 < ε < 3, quando x0 = 1. . . 34
2.2 Comparação entre a raiz exata e aproximada para 0 < ε < 3, quando x0 = −1. . 34
2.3 Comparação entre a primeira raiz exata e a raiz aproximada para 0 < ε < 1,
obtida por Séries de Potências. . . . . . . . . . . . . . . . . . . . . . . . . . . 39
2.4 Comparação entre a segunda raiz exata e a raiz aproximada para 0 < ε < 1,
obtida por Séries de Potências. . . . . . . . . . . . . . . . . . . . . . . . . . . 39
3.1 Contribuição não linear para a solução aproximada da equação (3.1.4) . . . . . . 45
3.2 Comparação entre Método Numérico e Método Perturbativo . . . . . . . . . . . 47
3.3 Método Perturbativo Regular - Aproximação de Ordem 1 . . . . . . . . . . . . 51
3.4 Método Perturbativo Regular - Aproximação de Ordem 2 . . . . . . . . . . . . 51
3.5 Método Perturbativo Regular - Aproximação de Ordem 3 . . . . . . . . . . . . 52
3.6 Método de Lindsted-Poincaré - Ordem 1 . . . . . . . . . . . . . . . . . . . . . 58
3.7 Método de Lindsted-Poincaré - Ordem 2 . . . . . . . . . . . . . . . . . . . . . 58
3.8 Método de Lindsted-Poincaré - Ordem 3 . . . . . . . . . . . . . . . . . . . . . 59
3.9 Método de Lindsted-Poincaré - Ordem 1 - ε = 0.1 . . . . . . . . . . . . . . . . 59
3.10 Método de Lindsted-Poincaré - Ordem 2 - ε = 0.1 . . . . . . . . . . . . . . . . 59
3.11 Método de Lindsted-Poincaré - Ordem 3 - ε = 0.1 . . . . . . . . . . . . . . . . 60
3.12 Método de Lindsted-Poincaré em Oscilador Amortecido - Ordem 3 - ε = 0.1 . . . 64
3.13 Método de Múltipla Escala - Oscilador Amortecido Ordem 2 - ε = 0.1 . . . . . . 72
3.14 Método de Múltipla Escala - Oscilador Amortecido Ordem 1 - ε = 0.1 . . . . . . 72
3.15 Método de Múltipla Escala - Oscilador Amortecido Ordem 2 - ε = 0.5 . . . . . . 73
3.16 Método de Múltipla Escala - Oscilador Amortecido Ordem 1 - ε = 0.5 . . . . . . 73
3.17 Método de Ponderação - Equação de van der Pol - ε = 0.1 . . . . . . . . . . . . 81
3.18 Método de Ponderação - Equação de van der Pol - ε = 0.5 . . . . . . . . . . . . 81
9

3.19 Ciclo Limite para o Oscilador de van der Pol - ε = 0.1 . . . . . . . . . . . . . . 85
3.20 Ciclo Limite para o Oscilador de van der Pol - ε = 0.5 . . . . . . . . . . . . . . 85
3.21 Ciclo Limite para o Oscilador de van der Pol - ε = 1 . . . . . . . . . . . . . . . 86

SUMÁRIO
INTRODUÇÃO 14
1 Conceitos Básicos 16
1.1 Teoria da Perturbação . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
1.1.1 Perturbação em Parâmetros . . . . . . . . . . . . . . . . . . . . . . 17
1.1.3 Perturbação de Coordenadas . . . . . . . . . . . . . . . . . . . . . . 18
1.2 Símbolos de Ordem e funções de gauge . . . . . . . . . . . . . . . . . . . . 25
1.3 Aproximações Assintóticas . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
1.4 Expansão Assintótica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
2 Perturbação em Equações Algébricas 31
2.1 Método Interativo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
2.2 Método da Expansão . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
2.3 Perturbações Singulares de Equações Algébricas . . . . . . . . . . . . . . . 37
3 Perturbação em Equações Diferenciais 41
3.1 Lançamento balístico . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
3.2 Método de Perturbação Regular . . . . . . . . . . . . . . . . . . . . . . . . 47
3.2.1 Equação de Du�ng . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
3.3 Método de Lindstedt-Poicaré . . . . . . . . . . . . . . . . . . . . . . . . . . 53
3.3.1 Equação de Du�ng . . . . . . . . . . . . . . . . . . . . . . . . . . . 54
3.3.2 Limitações do método . . . . . . . . . . . . . . . . . . . . . . . . . 60
3.4 Método de Múltiplas Escalas . . . . . . . . . . . . . . . . . . . . . . . . . . 65
3.4.1 Oscilador Amortecido . . . . . . . . . . . . . . . . . . . . . . . . . . 66
3.5 Método de Ponderação . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 73
3.5.1 Variação de parâmetros . . . . . . . . . . . . . . . . . . . . . . . . . 73
3.5.2 Descrição do método . . . . . . . . . . . . . . . . . . . . . . . . . . 75
11

3.5.3 Equação de van der Pol . . . . . . . . . . . . . . . . . . . . . . . . 76
3.5.4 Ciclos Limites de van der Pol . . . . . . . . . . . . . . . . . . . . . 82
CONCLUSÃO 87
REFERÊNCIAS 88
APÊNDICES 90
APÊNDICE A - Comandos em Maple . . . . . . . . . . . . . . . . . . . . . . . 90

INTRODUÇÃO
Muitos problemas físicos apresentam características que comprometem a busca por
uma solução analítica, como não-linearidade, complexas condições de contorno, etc. Mesmo
que estes problemas possuam soluções analíticas, muitas vezes esta não é interessante pois
podem ser muito complicados, não permitindo fácil interpretação e análise. Deste modo,
a �m de obter maior quantidade de informação do problema, recorre-se a soluções numé-
ricas, aproximações ou combinação destes.
Entre os diversos métodos de aproximação estamos aqui interessados nos métodos
analíticos de aproximações precisas, denominados métodos de perturbação assintótica.
De acordo com estas técnicas, a solução �ca representada pelos primeiros termos de uma
expansão assintótica, geralmente com até três termos.
Uma boa aproximação para a solução de um problema modelado matematicamente é
quando esta possui um erro comedido controlável, de modo que podemos diminuir o erro
através de algum procedimento racional.
Entre os métodos de aproximações, encontramos o método de perturbação assintó-
tica, que consiste em encontrar uma solução representada pelos primeiros termos de uma
expansão assintótica. Estas expansões podem ser dadas em duas formas: perturbação de
parâmetros e perturbação de coordenadas.
Vale ressaltar que métodos numéricos e de perturbação não competem entre si, mas
se complementam. Métodos numéricos são capazes de resolver problemas que são não-
lineares, não-homogêneos e multi-dimensionais com grande precisão. A desvantagem é
que eles não fornecem muita compreensão na física do problema, particularmente quando
o software e/ou o código utilizados não são disponibilizados.
Por outro lado, métodos perturbativos são também capazes de lidar com problemas
não-lineares, não-homogêneos e multi-dimensionais, embora numa menor extensão do que
os métodos numéricos, fornecendo uma solução não-numérica razoavelmente acurada, de
modo induzir um melhor entendimento da física do problema.
Historicamente, uma fundamentação mais rigorosa para a teoria da perturbação, ocor-
reu apenas em 1886, quando Poincaré (POINCARé, 1986) e Stieltjes (STIELTJES, 1886),
14
separadamente, publicaram trabalhos sobre séries assintóticas que em geral, divergiam.
As técnicas associadas ao desenvolvimento de métodos perturbativos durante a fase
de estruturação de conceitos tinham sido focadas exclusivamente na procura de soluções
aproximadas (de uma forma analítica), para problemas complexos.
Poincaré já vinha utilizando extensivamente um pequeno parâmetro para descrever a
mecânica celeste, onde o pequeno parâmetro neste contexto, é geralmente a razão entre
a massa dos corpos. Apesar da maioria dos problemas não serem exatamente singulares,
alguns demonstravam complexidade para obtenção de soluções.
A abordagem da teoria de perturbações e métodos assintóticos apresentados neste
trabalho, são realizados utilizando-se computação algébrica, em particular com o uso do
software Maple 131. Tal técnica é extremamente útil pois apesar de não ser em geral
necessário calcular muitos termos de uma expansão, a obtenção de termos até segunda
ordem envolve uma enorme quantidade de cálculos simbólicos.
Além disso, a funcionalidade do Maple permite que grá�cos de soluções sejam imedi-
atamente obtidos e comparados com soluções numéricas também encontradas com Maple
(INC., 2012). Para facilitar a compreensão, o Apêndice A apresenta informações sobre o
software e os principais comandos utilizados.
Este trabalho apresenta-se da seguinte forma: no Capítulo 1, serão apresentados os
conceitos básicos para compreensão da teoria de perturbação e de expansões assintóticas.
No Capítulo 2, será veri�cado a aplicabilidade da teoria da perturbação para obtenção das
raízes de uma equação algébrica. No Capítulo 3, será abordado os principais métodos para
obtenção de uma solução assintótica aproximada para equações diferenciais em problemas
físicos clássicos.
1Este software foi utilizado sob licença QVSGRQQ5CUW7897N pertencente a Universidade do Estado de
Santa Catarina.
15
Capítulo 1
Conceitos Básicos
Para início do desenvolvimento deste trabalho é necessário que seja feita a introdução
dos principais conceitos necessários a compreensão do texto que se segue.
1.1 Teoria da Perturbação
A teoria de perturbação expandiu-se muito rapidamente quando a análise matemática
foi posta em prática em meados do século dezoito, e muitos resultados neste campo em
especí�co foram obtidos por Newton, Euler, Lagrange e outros grandes físicos-matemáticos
da época.
Um dos campos que mais estimularam o desenvolvimento dos métodos, foi a física,
em especial a mecânica celeste, onde controvérsias com relação a teoria gravitacional de
Newton, instigou os pensadores a rigorosos estudos calculacionais. (VERHULST, 2005)
A teoria das perturbações consiste em analisar os efeitos de pequenas perturbações
em um parâmetro ou coordenada (NAYFEH, 2008) de uma equação. Caso estes efeitos
sejam mínimos, as perturbações são ditas regulares. Do contrário, são ditas singulares.
(SIMMONDS; JR., 1998)
Deste modo, a ideia básica de métodos perturbativos, consiste em obter uma solução
aproximada de um problema matemático explorando-se a presença deste parâmetro ou
coordenada próxima de modo que, quanto menor o parâmetro ou coordenada, melhor a
aproximação para a solução.
As perturbações regulares são descritas toda vez que procura-se expressar matemati-
camente um problema real de forma aproximada. Assim esta regularidade remete a: um
�uxo quase constante, um sistema massa-mola quase linear, condutividade independente
da temperatura e outros. (SIMMONDS; JR., 1998)
16

1.1.1 Perturbação em Parâmetros
As expansões podem se dar sobre um parâmetro, pequeno ou grande, o qual aparece
naturalmente na resolução da equação, ou é introduzido conforme a necessidade. Seja
u(x, ε) uma função que descreve um problema físico. Matematicamente, sabemos que esta
função pode ser representada pela equação diferencial L(u, x, ε) = 0 com uma condição
de contorno B(u, ε) = 0, onde x é um escalar ou vetor independente de ε. Em geral este
não é um problema que possui uma solução analítica. Contudo, se existir um ε = ε0 para
o qual a equação tenha solução exata, pode-se tentar a solução em série:
u(x, ε) = u0(x) + εu1(x) + ε2u2(x) + . . . , (1.1.1)
onde un independe de ε e u0(x) é solução quando ε = 0. Assim, pode-se substituir esta
expansão em L(u, x, ε) = 0 e B(u, ε) = 0 para obter os coe�cientes da expansão em ε.
Exemplo 1.1.2 Determine uma aproximação para as raízes da equação algébrica pertur-
bada:
εx3 − x+ 1 = 0 (1.1.2)
Para ε = 0 a solução é x0 = 1.Ao analisar ε 6= 0, sugere-se então que a solução da
equação acima seja dada conforme a equação (1.1.1).
De�ne-se então a equação (1.1.2) no Maple da seguinte forma:
> eq := εx3 − x+ 1 = 0
εx3 − x+ 1 = 0
como visto anteriormente, se ε = 0 então x0:
> x0 := 1
x0 := 1
assim, a solução aproximada para x é dada da seguinte forma:
> xap := sum(εnxn, n = 0..3)
xap := x0 + εx1 + ε2x2 + ε3x3
substituindo na equação (1.1.2), temos:
> eq1 := subs(x = xap, eq)
eq1 := ε(x0 + εx1 + ε2x2 + ε3x3)3 − x0 + εx1 + ε2x2 + ε3x3 + 1 = 0
expandindo a equação e evidenciando as potências de ε:
17

> eq2 := lhs(collect(expand(eq1), ε)) = 0
eq2 := ε10x33 + 3ε9x2x23 + (3x22x3 + 3x1x
23)ε
8 + (6x1x2x3 + x32 + 3x23)ε7+
(3x1x22 + 6x2x3 + 3x21x3)ε
6 + (3x22 + 6x1x3 + 3x21x2)ε5 + (3x3 + 6x1x2 + x31)ε
4+
(3x21 − x3 + 3x2)ε3 + (−x2 + 3x1)ε
2 + (1− x1)ε = 0
deste modo, é possível encontrar facilmente os valores de x1, x2, x3, identi�cado no Maple
por sx1, sx2 e sx3 respectivamente, igualando cada um dos coe�cientes ate ordem 3 zero.
Isto é:
> sx1 := solve(coeff(lhs(eq2), ε), x1)
sx1 := 1
> sx2 := solve(coeff(lhs(eq2), ε2), x2)
sx2 := 3
> sx3 := solve(coeff(lhs(eq2), ε), x1)
sx3 := 12
assim, substituindo os valores encontrados na equação (1.1.2), tem-se uma das soluções
(xap) do problema, desde que ε seja muito pequeno:
> xap := subs(x1 = sx1, x2 = sx2, x3 = sx3, xap)
xap := 1 + 1ε+ 3ε2 + 12ε3
Ou seja, obeteve-se uma solução em função de ε, o qual pode ser de�nido arbitraria-
mente. Assim, é possível então realizar uma comparação entre a solução obtida (xap) e
uma solução numérica, para um ε de�nido, conforme será visto adiante no Capítulo 2.
1.1.3 Perturbação de Coordenadas
Se um problema físico é representado matematicamente por uma equação diferencial
L(u, x) = 0, sujeito a uma condição de contorno B (u) = 0, onde x é um escalar e u (x)
toma forma u0 quando x→ x0 o qual, determina o desvio u de u0 quando toma-se um x
próximo de x0, podemos expandir u(x) em potências de x se x0 = 0 ou de x−1 se x0 =∞.
18

O Método de Frobenius para resolução de Equações Diferenciais Ordinárias (BOYCE;
DIPRIMA, 2012) em torno de um ponto singular regular, expressa bem o funcionamento
de Perturbações de Coordenadas.
Neste método, dada EDO, sugerimos que a solução da equação seja dada da seguinte
forma
y(x) =∞∑n=0
cn(x− x0)n+r, (1.1.3)
onde cn são constantes a ser obtidas, x0 é um ponto conhecido e r um parâmetro a ser
encontrado. Quando a EDO apresenta singularidades, convém avaliar a solução em torno
deste ponto.
De�nição 1.1.4 Seja uma equação diferencial de segunda ordem, de�nida da seguinte
forma
y′′(x) + P (x)y′(x) +Q(x)y(x) = 0. (1.1.4)
Um ponto singular x0 é dito singular regular da equação diferencial (1.1.4), se as
funções
p(x) = (x− x0)P (x), (1.1.5)
q(x) = (x− x0)2Q(x), (1.1.6)
forem analíticas em x0. (ZILL; CULLEN, 2008)
Exemplo 1.1.5 Encontre uma solução para a Equação Diferecial Ordinária abaixo:
2x2y′′(x) + 3xy′(x) + (2x2 − 1)y(x) = 0 (1.1.7)
Reescrevendo a equação (1.1.7) na forma (1.1.4) temos
y′′(x) +3
2xy′(x) +
(1− 1
2x2
)y(x) = 0. (1.1.8)
Em x = 0 tem-se uma singularidade regular, uma vez que p(x) = 32e q(x) =
(x2 − 1
2
),
isto é, p(x) e q(x) são analíticas em x0 = 0. Reproduzindo no Maple. temos:
> edo := 2x2(diff(y(x), x, x)) + 3x(diff(y(x), x)) + (2x2 − 1)y(x) = 0
edo := 2x2d2
dx2y (x) + 3 x
d
dxy (x) +
(2x2 − 1
)y (x) = 0
De�nida a equação, é possível identi�car os coe�cientes que serão nomeados d2, d1 e
d0. Isto é:
19

> d2 := 2x2; d1 := 3x; d0 := 2x2 − 1
d2 := 2x2
d1 := 3x
d0 := 2x2 − 1
Segundo o Método de Frobenius, existe uma solução para a equação (1.1.7) dada da
forma
y(x) :=∞∑n=0
cnxn+r, (1.1.9)
sendo r um índice a ser determinado.
Diferenciando a solução e aplicando na equação 1.1.7, identi�cam-se os três somató-
rios: S2 referente ao diferencial de segunda ordem, S1 ao diferencial de primeira ordem
e S0 que é a solução proposta. Em Maple, será limitado o somatório em um valor pré-
de�nido de modo a desenvolver manipulação alébrica. Isto é,
> S2 := sum (simplify (d2 · c[n] · (n+ r) · (n+ r − 1) · xn+r−2) , n = 0..k)
S2 :=k∑
n=0
2xn+rcn (n+ r) (n+ r − 1)
> S1 := sum(simplify(d1 · c[n] · (n+ r) · xn+r−1), n = 0..k)
S1 :=k∑
n=0
3xn+rcn (n+ r)
> S0 := sum(simplify(d0 · c[n] · xn+r), n = 0..k)
S0 :=k∑
n=0
(2x2 − 1
)cnx
n+r
Logo, a equação (1.1.7) pode ser descrita em termos de S2, S1 e S0, aqui denominada
S:
> S := S2 + S1 + S0 = 0
S :=k∑
n=0
2xn+rcn (n+ r) (n+ r − 1) +k∑
n=0
3xn+rcn (n+ r) +k∑
n=0
(2x2 − 1
)cnx
n+r = 0
Por conveniência computacional, determinamos um valor para k de modo e visualizar
20

e facilitar o desenvolvimento do método. Este valor de�nido é arbitrário e quanto maior
o valor para k, maior precisão na solução do problema. Assim, tomando
> k := 6
k := 6
o valor de S passa a ser
> S
S := 2xrc0r(r − 1) + 2x1+rc1(1 + r)r + 2x2+rc2(2 + r)(1 + r)+
+2x3+rc3(3 + r)(2 + r) + 2x4+rc4(4 + r)(3 + r) + 2x5+rc5(5 + r)(4 + r)+
+2x6+rc6(6 + r)(5 + r) + 3xrc0r + 3x1+rc1(1 + r) + 3x2+rc2(2 + r) + 3x3+rc3(3 + r)+
+3x4+rc4(4 + r) + 3x5+rc5(5 + r) + 3x6+rc6(6 + r) + (2x2 − 1)c0xr + (2x2 − 1)c1x
1+r+
+(2x2−1)c2x2+r+(2x2−1)c3x3+r+(2x2−1)c4x4+r+(2x2−1)c5x5+r+(2x2−1)c6x6+r = 0
Veri�ca-se claramente que ambos os termos, possuem o termo xr. Levando em consi-
deração que xr 6= 0, é possível dividir ambos os lados da equação S por xr e evidenciar as
potências de x. Esta nova equação será denominada ed por tratar-se da equação diferencial
(1.1.7) em série de potências já delimitada por k.
> ed := collect(simplify
(Sxr
), x)
ed := 2x8c6 + 2x7c5 + (2c4 + 2c6r2 + 25c6r + 77c6)x
6 + (54c5 + 2c3 + 21c5r + 2c5r2)x5+
+(2c2+17c4r+2c4r2+35c4)x
4+(13c3r+2c3r2+20c3+2c1)x
3+(2c0+9c2+2c2r2+9c2r)x
2+
+(2c1 + 5c1r + 2c1r2)x− c0 + c0r + 2c0r
2 = 0
Nesta etapa, é possivel identi�car a equação indicial ao igualar o coe�ciente de x0 a
zero,
> e0 := coeff(lhs(ed), x, 0) = 0
ei := −c0 + c0r + 2c0r2 = 0
e assim, é possível obter os valores de r que satisfazem ei
> ind := solve(e0, r)
ind :=1
2,−1
Logo, os valores dos índices r são rede�nidos as variáveis r1 e r2
21

> r1 := ind[1]; r2 := ind[2]
r1 :=1
2
r2 := −1
Retornando a equação ed, como c0 6= 0, é possível igualar todos os coe�cientes a zero
e resolver cada uma das equações geradas e escrever os demais termos em função de c0através do seguinte procedimento:
> for k from 1 to k do
edc[w] := coeff(lhs(ed), x, w) = 0;
c[w] := solve(edc[w], c[w])
od;
edc1 := 2c1r2 + 2c1 + 5c1r = 0
c1 := 0
edc2 := 2c0 + 2c2r2 + 9c2 + 9c2r = 0
c2 := −2c0
2r2 + 9 + 9r
edc3 := 2c3r2 + 13c3r + 20c3 = 0
c3 := 0
edc4 := −4c0
2r2 + 9 + 9r+ 17c4r + 35c4 + 2c4r
2 = 0
c4 := 4c0
(2r2 + 9 + 9r) (17r + 35 + 2r2)
edc5 := 2c5r2 + 21c5r + 54c5 = 0
edc6 := 2c6r2 + 25c6r + 8
c0(2r2 + 9 + 9r) (17r + 35 + 2r2)
+ 77c6 = 0
c6 := −8c0
(2r2 + 9 + 9r) (17r + 35 + 2r2) (2r2 + 25r + 77)
Assim, uma vez identi�cado os valores de ci, com 0 < i ≤ k, retornamos à solução
proposta inicialmente pelo método y(x), a qual nomearemos Sp.
> Sp := sum(xn+r ∗ c[n], n = 0..k)
Sp := xrc0 − 2x2+rc0
2r2 + 9r + 9+ 4
x4+rc0(2r2 + 9r + 9) (2r2 + 17r + 35)
+
−8 x6+rc0(2r2 + 9r + 9) (2r2 + 17r + 35) (2r2 + 25r + 77)
22

Como os índices r1 e r2 diferem-se por um não inteiro, isto é r1−r2 = 32temos que as
soluções para cada um dos índices são linearmente independentes e assim a solução geral
para a EDO é descrita da forma y(x) = C1Y1(x) + C2Y2, onde C1 e C2 são constantes
arbitrárias obtidas por meio das condições iniciais. No Maple obtém-se Y1 e Y2 aplicando
os índices r1 e r2 da seguinte forma,
> Y [1] := simplify(subs(r=r1,Sp)
c[0]
)Y1 := −
1
6930
√x(−6930 + 990x2 − 45x4 + x6
)> Y [2] := simplify
(subs(r=r2,Sp)
c[0]
)Y2 := −
1
270
−270 + 270x2 − 27x4 + x6
x
Repara-se que, nesta etapa foi suprimido c0 por tratar-se de uma constante arbitrária
que a partir de então, será de�nida apenas por C1 e C2. Assim, a solução geral da equação
(1.1.7) é dada por
> Sol := C1 · Y1 + C2 · Y2
Sol := − 1
6930C1√x(−6930 + 990x2 − 45x4 + x6
)− 1
270
C2 (−270 + 270x2 − 27x4 + x6)
x
Uma vez encontrado a solução pelo Método de Frobenius, a �m de checar a credibili-
dade do método, é possível compará-la à solução numérica para a equação (1.1.7).
Dado as condições iniciais y(1) = 2 e y′(1) = 0, na solução obtida, calcula-se as
constantes da seguinte forma
> aux1 := subs (x = 1, Sol) = 2
aux1 :=272
315C1 +
13
135C2 = 2
> aux2 := subs (x = 1, diff(Sol, x)) = 0
aux2 :=593
3465C1− 232
135C2 = 0
> solve(aux1, aux2)
C12 :=
{C1 =
535920
233951, C2 =
53370
233951
}
23

De�nido os valores de C1 e C2, a solução obtida pelo Método de Frobenius para 6
termos é:
> Solf := subs (C12, Sol)
Solf := − 232
701853
√x(−6930 + 990x2 − 45x4 + x6
)− 593
701853
−270 + 270x2 − 27x4 + x6
x
Retornando a equação (1.1.7), é possível obter uma solução numérica precisa para
a EDO com as condições iniciais de�nidas anteriormente, efetuando o seguinte procedi-
mento:
> edo
edo := 2x2d2
dx2y (x) + 3 x
d
dxy (x) +
(2x2 − 1
)y (x) = 0
> aux3 := dsolve ({edo, y (1) = 2,D (y) (1) = 0} , y (x))
aux3 := y (x) = 2(Y (3/4, 1)− Y (−1/4, 1)) J (3/4, x)
(Y (3/4, 1)J (−1/4, 1)− Y (−1/4, 1)J (3/4, 1)) 4√x+
+2(−J (3/4, 1) + J (−1/4, 1))Y (3/4, x)
(Y (3/4, 1)J (−1/4, 1)− Y (−1/4, 1)J (3/4, 1)) 4√x
> Soln := rhs(aux3)
Soln := 2(Y (3/4, 1)− Y (−1/4, 1)) J (3/4, x)
(Y (3/4, 1)J (−1/4, 1)− Y (−1/4, 1)J (3/4, 1)) 4√x+
+2(−J (3/4, 1) + J (−1/4, 1))Y (3/4, x)
(Y (3/4, 1)J (−1/4, 1)− Y (−1/4, 1)J (3/4, 1)) 4√x
Uma vez que obtidos Solf(x), pelo Método de Frobenius, e Soln(x), pelo método
numérico, é possível efetuar uma comparação grá�ca entre os resultados obtidos. Assim,
temos que
> plot ([Solf, Soln], x = 0 . . . 3, color = [blue, red], linestyle = [solid, dashdot])
Podemos observar na Figura 1.1 mostra que a aproximação se mostra e�ciente até
x = 2, 5 e a melhora desta aproximação se dará pelo número de termos obtidos, na Figura
1.2 foi plotado a solução obtida para 10 termos e a solução apresenta boa acurácia até
aproximadamente x = 4.
Como o método busca uma solução em série de in�nitos termos, temos que a solução
através do método é tão e�ciente quanto a solução numérica.
24

Figura 1.1: Método de Frobenius -
Aproximação para 6 termos
Fonte: Produção do próprio autor
Figura 1.2: Método de Frobenius -
Aproximação para 10 termos
Fonte: Produção do próprio autor
1.2 Símbolos de Ordem e funções de gauge
Seja f uma função dependente de um parâmetro ε, cujo comportamento deseja-se
estudar quando ε tende a zero. Existem três possibilidades:
(i) f(ε) −→ 0, quando ε→ 0
(ii) f(ε) −→ A, quando ε→ 0
(iii) f(ε) −→∞, quando ε→ 0
Nos casos (i) e (ii), a taxa com a qual estes limites tomam tais valores é expressa
comparando f(ε) com funções conhecidas, chamadas funções de gauge. As funções mais
simples e mais úteis são as potências de ε:
. . . , ε−2, ε−1, 1, ε, ε2, . . . (1.2.10)
É possível encontrar também, outras funções de gauge para complementar comporta-
mentos que não são descritos acima, tais como,
sin(ε), cos(ε), tan(ε), sinh(ε), cosh(ε), tanh(ε), . . . (1.2.11)
O comportamento de uma função f(ε) é então, comparado ao comportamento de uma
função de gauge φ(ε), quando ε tende a zero. O que nos introduz aos símbolos de Landau:
25
O e o (HOLMES, 1995, p. 4).
De�nição 1.2.1 Seja f e φ funções dependentes de um parâmetro ε, onde φ é função de
gauge. Diz-se que f(ε) é 'o grande' de φ(ε) quando existem constantes k0 e ε1, indepen-
dentes de ε, tais que
|f(ε)| ≤ k0|φ(ε)|, 0 < ε < ε1. (1.2.12)
A notação utilizada para esta comparação entre as funções é: f(ε) = O(φ(ε)).
De�nição 1.2.2 Seja f e φ funções dependentes de um parâmetro ε, onde φ é função de
gauge. Diz-se que f(ε) é 'o pequeno' de φ(ε) quando para δ > 0, existe um ε2, independente
de ε, em que
|f(ε)| ≤ δ|φ(ε)|, 0 < ε < ε1. (1.2.13)
A notação utilizada para esta comparação entre as funções é: f(ε) = o(φ(ε)).
Existem outras formas para determinar a comparação entre as funções f(ε) e φ(ε). A
forma mais e�ciente é através conceitos de limites, onde diz-se f(ε) é 'o grande' de φ(ε)
quando ε tende a zero se
`imε→0
∣∣∣∣f(ε)φ(ε)
∣∣∣∣ <∞. (1.2.14)
De modo similar, f(ε) é 'o pequeno' de φ(ε) se
`imε→0
∣∣∣∣f(ε)φ(ε)
∣∣∣∣ = 0. (1.2.15)
As demonstrações destas simpli�cações serão omitidas neste trabalho, mas ambas
podem ser obtidas explorando limites pela de�nição. (LIMA, 2007).
Exemplo 1.2.3 Seja f = sin(ε). Comparando a função f com φ1 = ε e φ2 = 1, temos
`imε→0
∣∣∣∣sin(ε)ε
∣∣∣∣ = 1⇒ f = O(φ1) (1.2.16)
`imε→0
∣∣∣∣sin(ε)1
∣∣∣∣ = 0⇒ f = o(φ2) (1.2.17)
26

Exemplo 1.2.4 Avaliando novamente f = sen(ε), ao utilizar Séries de Taylor, obtém-se
a seguinte aproximação de segunda ordem fst = ε − 12ε2sen(ξ). Temos que a primeira
potência de ε, é a ordem da expansão. Desta forma, seja φ = ε, temos que f = O(ε)
conforme visto no exemplo anterior.
Algumas propriedades importantes dos símbolos de ordem, são:
i. f = O(1) quando ε→ 0⇔ f(ε) é limitado quando ε→ 0.
ii. f = o(1) quando ε→ 0⇔ f(ε) quando ε→ ε0.
iii. f = o(φ) quando ε→ 0⇒ f = O(φ) quando ε→ 0.
Outras duas notações para símbolos de ordem também serão utilizadas, de modo a
facilitar a compreensão de aproximações assintóticas. São elas � e ∼ que descrevem o e
O respectivamente.
Exemplo 1.2.5 Tomando os exemplos abordados anteriormente: f = sin(ε), φ1 = ε e
φ2 = 1, temos as relações (BENDER, 2011/2012)
• Diz-se que f é assintótico a φ1 quando f = O(φ1), e denota-se: f ∼ φ1.
• Diz-se que f é negligenciável a φ2 quando f = o(φ2), e denota-se: f � φ2.
27

1.3 Aproximações Assintóticas
A �m de de�nir aproximações assintóticas, convém avaliar o seguinte exemplo:
Exemplo 1.3.1 Considere a integral exponencial (Ei(x)), de�nida para um x > 0, x ∈ R
Ei(x) =
∫ ∞x
e−t
tdt. (1.3.18)
Solucionando-a por meio da integração por partes, temos
> with(student)
> i :=∫∞x
e−t
tdt
i :=
∫ ∞x
e−t
tdt
> i0 := intparts(i, t−1)
i0 :=e−x
x−∫ ∞x
e−t
t2dt
> i1 := op(1, i0) + intparts(op(2, i0), t−2)
i1 :=e−x
x− e−x
x2+
∫ ∞x
e−t
t3dt
> i2 := op(1, i1) + op(2, i1) + intparts(op(3, i1), t−3)
i2 :=e−x
x− e−x
x2+ 2
e−x
x3−∫ ∞x
e−t
t4dt
> i3 := op(1, i2) + op(2, i2) + op(3, i2) + intparts(op(4, i2), 1/t4)
i3 :=e−x
x− e−x
x2+ 2
e−x
x3− 6
e−x
x4+
∫ ∞x
e−t
t5dt
É possível dizer então dizer que, após n integrações, temos
Ei(x) = Sn(x) +Rn(X), (1.3.19)
onde Sn(x) é a soma parcial até n termos �ca de�nida
Sn(x) = e−1[1
x− 1
x2+
2!
x3− 3!
x4+ . . .+
(−1)n+1(n− 1)!
xn
](1.3.20)
28

e Rn(x) é o resto
Rn(x) = (−1)nn!∫ ∞x
e−1
tdt. (1.3.21)
Note que pelo teste da razão temos que Sn(x) não converge quando n→∞, isto é,
> Limit(simplify
( ∣∣∣∣ (−1)n+2n!
xn+1
∣∣∣∣∣∣∣ (−1)n+1(n−1)!xn
∣∣∣))
`imn→∞
∣∣∣nx
∣∣∣Assim, como em Rn(x), não existem limitações quando n→∞. Logo, convém propor
então que n seja um valor �xo e que x→∞. Como visto anteriormente no teste da razão,
sabemos que o limite existirá e será 0.
Para Rn(x) podemos realizar a seguinte análise quando x→∞
|Rn(x)| = n!
∣∣∣∣ ∫ ∞x
e−1
tdt
∣∣∣∣ < n!e−x
xn+1. (1.3.22)
Então o erro cometido durante o truncamento da série após n termos é numericamente
inferior ao primeiro termo negligenciado Sn+1. Temos então que se x → ∞ e n é �xado
Rn(x)→ 0.
Assim, Ei(x) pode ser representada com um erro que pode ser arbitrariamente pe-
queno, desde que tomemos um x su�cientemente grande. Isto é,
Ei(x) =n∑k=0
(−1)k+1(k − 1)!
xk+ o(x−1). (1.3.23)
Tomando então a série até (n− 1)-ésimo termo, podemos reescrevê-la da seguinte forma
Ei(x) =n−1∑k=0
(−1)k+1(k − 1)!
xk+O(x−1). (1.3.24)
Isto é,
Ei(x) ∼ (−1)k+1(k − 1)!
xk, x→∞. (1.3.25)
29

1.4 Expansão Assintótica
Não é necessário utilizar série de potências para representar uma função (NAYFEH,
2008) . Ao contrário , podemos usar uma sequências de funções delta(ε) enquanto
δn(ε) = o[δn−1(ε)], ε→ 0 (1.4.26)
Esta sequência é chamada de sequência assintótica. Alguns exemplos de sequências
assintóticas são
εn, εn3 , (`nε)n, (sen(ε))n (1.4.27)
Em termos de sequências assintóticas, podemos de�nir expansões assintóticas se to-
marmos∑∞
k=0 akδk(ε), onde ak independe de ε, e δk(ε) é sequência assintótica. Ou seja,
y ∼∞∑k=0
akδk(ε), ε→ 0⇔ y =n−1∑k=0
akδk(ε) +O[δn(ε)], ε→ 0 (1.4.28)
Assim, temos que uma série assintótica é um caso especial de uma expansão assintó-
tica.
Se uma expansão é assintótica, então o principal termo é virtualmente correto quando
ε é su�cientemente correto. Em problemas práticos,temos que o termo principal da ex-
pansão geralmente não tem acurácia quando ε = 0, ou uma função é avaliada quando ε
não é pequeno.
Desta forma, adicionar termos para complementar a solução inicial ε = 0, pode con-
tribuir para maior acurácia da solução. No entanto, existem limites para que a expansão
não divirja quando n→ 0.(HOLMES, 1995).
30
Capítulo 2
Perturbação em Equações Algébricas
É interessante que o início do estudo de perturbação assintótica seja realizado em
equações algébricas, visto a fácil obtenção de soluções exatas que permite uma rápida
veri�cação da acurácia do método.
Uma breve introdução foi vista na Seção 1.2.1 quando apresentado a teoria da Per-
turbação, onde foi obtido uma solução aproximada para a raiz da equação, através da
perturbação regular em um parâmetro. Porém, existem outros métodos para obtenção da
solução e também existem ferramentas para auxiliar na obtenção da raiz de uma equa-
ção, quando esta não apresenta-se perturbada e quando di�culdades são apresentadas no
desenvolvimento dos métodos.
Assim, será abordado dois métodos comuns para solução assintótica de equações se-
guindo Hinch em (HINCH, 1991).
2.1 Método Interativo
O Método Interativo, consiste em isolar o termo de maior grau da equação de modo
a obter uma função recursiva em n.
Exemplo 2.1.1 De�na uma aproximação para as raízes da equação perturbada
x2 + εx− 1 = 0 (2.1.1)
A �m de desenvolver o método em Maple, de�ne-se a equação (2.1.1)
> eq := x2 + εx− 1 = 0
eq := x2 + εx− 1 = 0
31

e rearranja-se a equação de forma a isolar a maior potência
> eqi := isolate(eq, x2)
eqi := x2 = 1− εx
e de�ne-se assim, uma equação recursiva:
> eqi := xn =√−εxn−1 + 1
eqi := xn =√−εxn−1 + 1
Retornando a equação (2.1.1), para obter os possíveis valores para x0, resolve-se a
equação para ε = 0, isto é
> x0 := solve(subs(ε = 0, eq), x)
x0 := 1,−1
Obteve-se dois valores de x para que a solução seja satisfeita. Claramente para ε 6= 0,
a solução não possui boa acurácia assim, para calcular a raiz da equação quando x0 = 1,
temos
> x0 := 1
x0 := 1
> for i to 4 do
Substituindo o valor de x0 na equação recursiva e expandindo a solução xn em séries
de Taylor, obtém-se os seguintes valores
x[i] := convert(series(rhs(subs(x[n] = x[i], x[n− 1] = x[i− 1], eqi)),
ε, i+ 1), polynom)
od;
x1 := 1− 1
2ε
x2 := 1− 1
2ε+
1
8ε2
x3 := 1− 1
2ε+
1
8ε2
32

x4 := 1− 1
2ε+
1
8ε2 − 1
128ε4
Para calcular a outra raiz da equação, procede-se da mesma forma adotando o outro
valor para x0, isto é x0 = −1 e leva-se em consideração a parte negativa da raiz na equação
eqi.
Assim, as raízes da equação (2.1.1) são:
x = 1− 1
2ε+
1
8ε2 − 1
128ε4
x = −1− 1
2ε− 1
8ε2 +
1
128ε4
A maior di�culdade presente no método está no rearranjar a equação fornecida, uma
vez que este rearranjo pode não ser realizado com a facilidade exibida no exemplo acima.
Nota-se também que as aproximações de primeira ordem muito diferem das raízes exatas
da equação, sendo necessárias mais iterações para uma boa acurácia.
Assim sendo, uma vez que os valores pouco diferem a cada iteração, temos então uma
boa aproximação.
Efetuando uma breve comparação entre a raiz exata da equação e a aproximada,
temos,
> eqe := solve (eq, x)
eqe := −1
2ε+
1
2
√ε2 + 4,−1
2ε− 1
2
√ε2 + 4
que é solução exata e
> xex := eqe2
xex := −1
2ε+
1
2
√ε2 + 4
que é a solução obtida pelo método.
> plot ([xex, x4, x3], ε = 0 . . . 3, linestyle = [dash, solid, dot])
33

Figura 2.1: Comparação entre a raiz
exata e aproximada para 0 < ε < 3,quando x0 = 1.
Fonte: Produção do próprio autor
Figura 2.2: Comparação entre a raiz
exata e aproximada para 0 < ε < 3,quando x0 = −1.
Fonte: Produção do próprio autor
De forma análoga, o grá�co para a raíz negativa é apresentado na Figura 2.2 e assim,
veri�ca-se então que para uma solução aproximada quinta ordem, em ambas as raízes da
equação, as raízes aproximadas tem boa acurácia para 0 < ε < 1, 5.
2.2 Método da Expansão
Consiste em determinar as raízes da equação quando ε = 0 e então, a partir das raízes
não perturbadas, fazer uma expansão em potências do parâmetro ε. É o método mais
difundido nos estudos perturbativos de equações (NAYFEH, 2008). Isto é
x(ε) = x0 + x1ε+ x2ε2 + . . . (2.2.2)
Considerando novamente a equação (2.1.1), aplicada no método anterior, onde buscou-
se uma solução aproximada de O[ε5], é possível obter as soluções aproximadas da seguinte
forma:
> eq := x2 + εx− 1 = 0
eq := x2 + εx− 1 = 0
> x0 := solve(subs(ε = 0, eq), x)
x0 := 1,−1
34

Ao buscar uma solução aproximada para a equação (2.1.1) de ordem 5, supõe-se que
esta apresente-se na forma
x = x0 + x1ε+ x2ε2 + x3ε
3 + x4ε4. (2.2.3)
Em Maple:
> x := x0 + εx1 + ε2x2 + ε3x3 + ε4x4
x := x0 + εx1 + ε2x2 + ε3x3 + ε4x4
Uma vez que sabe-se os possíveis valores de x0 quando ε = 0, �xa-se o valor de x0 a
�m de obter uma das raízes da equação. Seja x0 = 1, temos
> x0 := 1
x0 := 1
> eq
(1 + εx1 + ε2x2 + ε3x3 + ε4x4)2 + ε(1 + εx1 + ε2x2 + ε3x3 + ε4x4)− 1 = 0
evidenciando as potências de ε e igualando os coe�cientes a zero, temos
> eq := collect(expand(eq), ε)
(2x1x3+ x3+ 2x4+ x22)ε4 + (x2+ 2x3+ 2x1x2)ε3 + (x1+ 2x2+ x12)ε2 + (2x1+ 1)ε = 0
> x1 := solve(coeff(lhs(eq), ε), x1)
x1 = −1
2
> x2 := solve(coeff(lhs(eq), ε), x2)
x2 =1
8
> x3 := solve(coeff(lhs(eq), ε), x3)
x3 = 0
35

> x4 := solve(coeff(lhs(eq), ε), x4)
x4 = − 1
128
Então, a raiz aproximada quando tomamos x0 = 1, é
> x
x := 1− 1
2ε+
1
8ε2 − 1
128ε4
De�nido o outro possível valor para x0, isto é x0 = −1, temos através do mesmo
procedimento, um valor aproximado para a outra raiz da equação. Ou seja,
> x0 := −1x0 := −1
> x := x0 + εx1 + ε2x2 + ε3x3 + ε4x4
x := −1 + εx1 + ε2x2 + ε3x3 + ε4x4
> eq
(−1 + εx1 + ε2x2 + ε3x3 + ε4x4
)2+ ε(−1 + εx1 + ε2x2 + ε3x3 + ε4x4
)− 1 = 0
> eq := collect (expand (eq) , ε)
eq := . . .+(x3− 2x4 + 2x1x3 + x22
)ε4 + (−2x3 + 2x1x2 + x2) ε3 + . . .
. . .+(x12 − 2x2 + x1
)ε2 + (−1− 2x1) ε = 0
Tomando os coe�cientes de ε um a um, temos
> x1 := solve (coeff (lhs (eq) , ε) , x1)
x1 := −1
2
> x2 := solve (coeff (lhs (eq) , ε2) , x2)
x2 := −1
8
36
> x3 := solve (coeff (lhs (eq) , ε3) , x3)
x3 := 0
> x4 := solve (coeff (lhs (eq) , ε4) , x4)
x4 :=1
128
Então, a raíz aproximada para x0 = −1, é
> x
−1− 1
2ε− 1
8ε2 +
1
128ε4
que é solução aproximada para a raiz com solução não perturbada igual a −1.
Como os resultados obtidos para a equação (2.1.1) são os mesmos veri�cados no
método interativo, os grá�cos comparativos gerados pelas soluções exatas e aproximadas
de ordem 5, são os mesmos apresentados nas Figuras 2.2 e 2.1.
2.3 Perturbações Singulares de Equações Algébricas
O método abordado anteriormente foi veri�cado em uma equação inicialmente per-
turbada de modo que a solução para ε = 0, já identi�ca os dois primeiros termos das
soluções aproximadas.
Supõe-se agora, a mesma equação (2.1.1), porém, não perturbada. Isto é
x2 − x+ 1 = 0. (2.3.4)
Pode-se então inserir um parâmetro ε de modo a auxiliar na busca de uma raiz, como
visto anteriormente. Porém, a inserção deste parâmetro pode modi�car a maneira na qual
obtém-se as raízes aproximadas (BENDER; ORSZAG, 1999).
Seja a equação (2.3.4), se a inserção do parâmetro for no termo quadrático da equação,
temos
εx2 − x+ 1 = 0. (2.3.5)
Nota-se que ao tomar ε = 0, conforme realizado anteriormente, a raiz aproximada é
x0 = 1. Ou seja, na equação (2.3.5) que possui duas raízes para ε 6= 0, apenas uma raiz
foi encontrada e assim, é possível obter apenas uma solução aproximada.
Ao veri�car com detalhes o ocorrido, expandindo as duas soluções exatas em Série de
37

Taylor, temos
> eq := εx2 + x− 1 = 0
eq := εx2 + x− 1 = 0
> x := solve(eq, x)
x :=−1 +
√1 + 4ε
2ε,−1−
√1 + 4ε
2ε
> x1 := series(x[1], ε, 5)
x1 := 1− ε+ 2ε2 − 5ε3 +O(ε4)
> x2 := series(x[2], ε, 5)
x2 := −ε−1 + ε− 2ε2 + 5ε3 +O(ε4)
Assim, nota-se que uma das raízes inicia-se em ε0 e a outra em ε−1, logo a sugestão
de raiz aproximada da forma∑n
k=0 xkεk, para o método expansivo por exemplo, não
funcionaria para tal equação perturbada. Deste modo a suposição correta para a forma
da raiz aproximada deve ser∑n
k=−1 xkεk.
Comparando as raízes expandidas x1 e x2 para com a solução exata da equação (2.3.4),
temos
> x1 := convert (x1, polynom)
x1 := 1− ε+ 2ε2 − 5ε3
> x2 := convert (x2, polynom)
x2 := −ε−1 − 1 + ε− 2ε2 + 5ε3
> plot ([x1, x1], ε = 0 . . . 1, linestyle = [dash, solid])
> plot ([x2, x2], ε = 0 . . . 1, linestyle = [dash, solid])
38
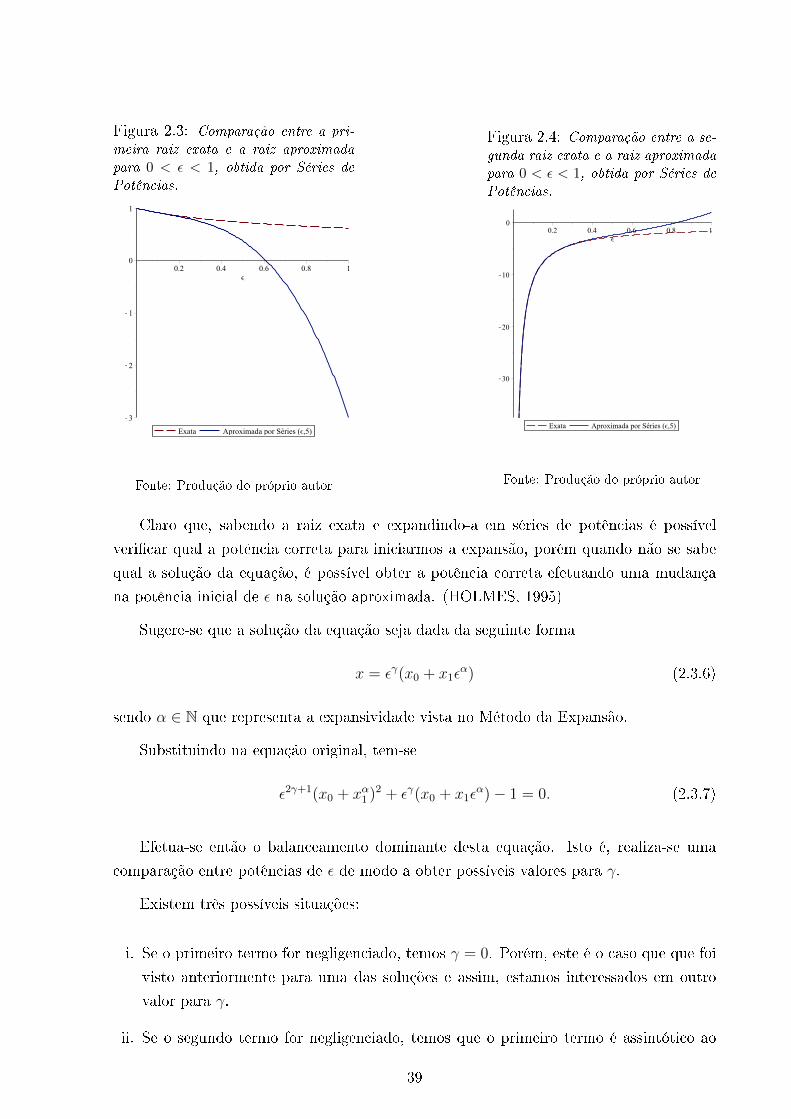
Figura 2.3: Comparação entre a pri-
meira raiz exata e a raiz aproximada
para 0 < ε < 1, obtida por Séries de
Potências.
Fonte: Produção do próprio autor
Figura 2.4: Comparação entre a se-
gunda raiz exata e a raiz aproximada
para 0 < ε < 1, obtida por Séries de
Potências.
Fonte: Produção do próprio autor
Claro que, sabendo a raiz exata e expandindo-a em séries de potências é possível
veri�car qual a potência correta para iniciarmos a expansão, porém quando não se sabe
qual a solução da equação, é possível obter a potência correta efetuando uma mudança
na potência inicial de ε na solução aproximada. (HOLMES, 1995)
Sugere-se que a solução da equação seja dada da seguinte forma
x = εγ(x0 + x1εα) (2.3.6)
sendo α ∈ N que representa a expansividade vista no Método da Expansão.
Substituindo na equação original, tem-se
ε2γ+1(x0 + xα1 )2 + εγ(x0 + x1ε
α)− 1 = 0. (2.3.7)
Efetua-se então o balanceamento dominante desta equação. Isto é, realiza-se uma
comparação entre potências de ε de modo a obter possíveis valores para γ.
Existem três possíveis situações:
i. Se o primeiro termo for negligenciado, temos γ = 0. Porém, este é o caso que que foi
visto anteriormente para uma das soluções e assim, estamos interessados em outro
valor para γ.
ii. Se o segundo termo for negligenciado, temos que o primeiro termo é assintótico ao
39

terceiro termo, ou seja,
2γ + 1 = 0⇒ γ =−12
(2.3.8)
No entanto, substituindo o valor de γ na equação (2.3.7), veri�camos que a ordem
do primeiro termo e do terceiro são iguais a zero. Logo, não podemos negligenciar o
segundo termo, pois o mesmo não possui a maior ordem.
iii. Se o terceiro termo for negligenciado, então o primeiro termo é assintótico ao segundo,
de modo que
2γ + 1 = γ ⇒ γ = −1 (2.3.9)
A ordem do termo negligenciado, que é zero, é maior que a ordem do primeiro e
segundo termo. Ou seja, esta alteração é viável.
Portanto, a primeira potência de ε na solução aproximada deverá ser εγ.
O método abordado por Holmes é interessante pois fornece a mudança necessária
para abordagem das raízes, independentes de potências inteiras ou não. Além disto, este
método não se reduz somente a equações algébricas. Porém, existem outras técnicas para
efetuar o este balanceamento. (NAYFEH, 2008), (BENDER; ORSZAG, 1999) e (JAGER;
FURU, 1996)
40

Capítulo 3
Perturbação em Equações Diferenciais
3.1 Lançamento balístico
A �m de desenvolver métodos de perturbação para resolver equaões diferenciais,
estudar-se-á o problema de lançamento balístico, isto é, equação de movimento para um
objeto lançado radialmente para cima da superfície da Terra, conforme apresenta Holmes.
(HOLMES, 1995, p. 1)
Seja x(t) a altura, medida a partir da superfície da Terra, utilizando a segunda lei de
Newton , obtém-se para t > 0, a seguinte equação para o movimento
d2x
dt2= − gR2
(x+R)2, (3.1.1)
onde R é o raio da Terra e g é a constante gravitacional.
Ao assumir que o objeto é jogado a partir da superfície com velocidade inicial, temos
x(0) = 0 e x′(0) = v0, onde v0 > 0.
A não linearidade da equação diferencial acima, faz com que seja difícil a obtenção
de uma solução de forma exata. Assim, é natural que efetue-se alguma simpli�cação para
a equação que facilite a obtenção da solução. Por exemplo, ao supor que o objeto não
vai muito longe da superfície da terra, é possível argumentar que a altura alcançada pelo
objeto é desprezível se comparada com o raio da Terra, isto é, x � R, e assim obter a
mesma equação da seguinte forma
d2x
dt2= −gR
2
R2= −g, (3.1.2)
ou seja, simpli�cou-se da equação (3.1.1) de tal forma que, como x ∼ x0 então x′′0 = −g eassim, avaliando a equação (3.1.2), têm-se que se x0 é solução de (3.1.2) para as condições
41

iniciais propostas em (3.1.1), então x0(0) = 0 e x′0(0) = 0.
Resolvendo a equação (3.1.1) com as condições iniciais propostas, temos que a equação
para a trajetória obtida é a já estudada em cursos iniciais de Física,
x0(t) = −1
2gt2 + v0(t), (3.1.3)
a qual possui altura máxima em xmax = x( t2) =
v202g
quando t = 2v0g.
Ao efetuar tal simpli�cação não é possível obter uma correção para a solução aproxi-
mada x0. Deste modo, a obtenção de uma equação que permite tal correção é útil, pois
permite analisar a natureza da não linearidade da equação original para o lançamento do
objeto.
Para efetuar uma redução mais sistemática é necessário adimensionalizar as variáveis.
Seja τ = ttce y(τ) = x(t)
x(tc)onde tc e xc são, respectivamente, tempo e solução característica.
Tem-se então, a liberdade de escolha para estas constantes porém, a escolha a ser feita
deve representar a situação que foi considerada no problema original. Assim, de�ne-se
tc =v0ge xc =
v20g, ou seja, o tempo gasto para que o objeto alcance a altura máxima é o
dobro da altura máxima. Efetuando as alterações em (3.1.1) e com τ > 0, o problema se
transforma em:d2y
dy2= − 1
(1 + ρy)2(3.1.4)
com as condições iniciais sendo y(0) = 0 e y′(0) = 1.
Nota-se que o parâmetro ε =v20Rg
não possui dimensão e isto é importante porque
fornece uma medida da altura que o projétil pode alcançar em comparação com o raio da
Terra. Ou seja, em termos da função x(t), temos que 12ε é a razão da altura máxima do
projétil em relação ao raio da Terra.
Assumindo, por exemplo, que o R ≈ 6437 km, obtém-se
ρ =v20Rg⇒ ε = v20656, 06× 10−6 (3.1.5)
Como v0 deve ser muito menor que 103, temos que a equação (3.1.3) é uma boa
aproximação para a solução. Ainda, como ρ é um valor muito pequeno, é possível avaliar
uma solução melhor aproximada para o problema de lançamento oblíquo efetuando uma
perturbação nesse parâmetro.
Deste modo, sabendo que ρ é um valor pequeno, é possível tomar ρ = ε e assim,
veri�car este acerto reconstruindo uma aproximação de primeira ordem para a equação
(3.1.4). Isto pode ser feito supondo que a dependência da solução em ε, pode ser obtida
42

utilizando séries de Taylor em torno de ε = 0. Ou seja, para um ε pequeno temos
y(τ) ∼ y0(τ) + y1(τ)ε (3.1.6)
Isto é, em Maple, a solução aproximada é dada por
> ya := y0(τ) + εy1(τ)
ya := y0(τ) + εy1(τ)
Substituido em (3.1.4) e manipulando a equação temos
> eq := diff(y(τ), τ, τ) = − 1(1+εy(τ))2
eq :=d
dτ 2y(τ) = − 1
(1 + εy(τ))2
> eq1 := subs(y(τ) = ya, eq)
eq1 :=d
dτ 2(y0(τ) + εy1(τ)) = −
1
(1 + ε(y0(τ) + εy1(τ)))2
> eq2 := expand(eq1)
eq1 :=d
dτ 2y0(τ) + ε
d
dτ 2y1(τ)) = −
1
(1 + εy0(τ) + ε2y1(τ))2
Como interessa apenas uma aproximação de primeira ordem, é possível simpli�car eq2
eliminando ε2, isto é,
> eq2 := diff(y0(τ), τ, τ) + ε(diff(y1(τ), τ, τ)) = − −1(1+εy0(τ))2
eq2 :=d
dτ 2y0(τ) + ε
d
dτ 2y1(τ) = −
−1(1 + εy0(τ))2
Assim, pode-se expandir o lado direito da equação acima em séries de potências de
modo a poder comparar os coe�cientes de ε em ambos os lados da equação.
> eq3 := series(rhs(eq2), ε, 2)
eq3 :=d
dτ 2y0(τ) + ε
d
dτ 2y1(τ) = −1 + 2εy0(τ) +O(ε2)
Usando as condições iniciais propostas, temos
y(0) = y0(0) + εy1(0) = 0⇒ y0(0) = 0, y1(0) = 0, (3.1.7)
43

y′(0) = y′0(0) + εy′1(0) = 1⇒ y′0(0) = 1, y′1(0) = 0. (3.1.8)
No Maple,
> ic1 := y0 (0) = 0,D (y0) (0)
ic1 := y0 (0) = 0,D (y0) (0) = 1
> ic2 := y1 (0) = 0,D (y1) (0) = 0
ic2 := y1 (0) = 0,D (y1) (0) = 0
Reescrevendo eq3 de modo a evidenciar as potências de ε, temos
> eq4 := lhs (eq3)− convert (rhs (eq3) , polynom) = 0
eq4 :=d2
dτ 2y0 (τ) + ε
d2
dτ 2y1 (τ) + 1− 2εy0 (τ) = 0
> eq5 := collect (eq4, ε) = 0
eq5 :=
(d2
dτ 2y1 (τ)− 2y0 (τ)
)ε+
d2
dτ 2y0 (τ) + 1 = 0
Uma vez evidenciado as potências de ε, é possivel igualar os coe�cientes a zero de
modo a obter os valores para as funções y0(τ) e y1(τ). Isto é,
> eqy0 := coeff (eq5, ε, 0) = 0
eqy0 :=d2
dτ 2y0 (τ) + 1 = 0
> eqy1 := coeff (eq5, ε, 1) = 0
eqy1 :=d2
dτ 2y1 (τ)− 2y0 (τ) = 0
De�nidas as equações eqy0 e eqy1, a solução destas equações são
> sy0 := dsolve ({ic1, eqy0})
sy0 := y0 (τ) = −1
2τ 2 + τ
44

> sy1 := dsolve ({ic2, subs (y0 (τ) = rhs (sy0) , eqy1)})
sy1 := y1 (τ) = −1
12τ 4 +
1
3τ 3
Portanto, a solução aproximada para a equação (3.1.4) para primeira ordem é:
> ya := rhs (sy0) + εrhs (sy1)
ya := −1
2τ 2 + τ + ε
(− 1
12τ 4 +
1
3τ 3)
A solução aproximada vale para 0 < τ < τh, onde τh é o tempo que leva para o objeto
voltar a superfície em que foi lançado. Pode-se veri�car que a solução aproximada para
y(τ) exibe características físicas para o problema.
Ao olhar para as soluções parciais obtidas y0(τ) e y1(τ), veri�ca-se a contribuição
obtida em um campo gravitacional uniforme e a contribuição não-linear para a solução
aproximada, respectivamente.
Deste modo, nota-se que a solução está de acordo com a física do problema, que nos
diz que a força do campo gravitacional decresce com a altura, o que conduz a crer que o
projétil permanece no ar por mais tempo, conforme nos mostra a Figura 3.1.
Figura 3.1: Contribuição não linear
para a solução aproximada da equação
(3.1.4)
Fonte: Produção do próprio autor
Pode-se ainda, efetuar uma comparação entre o método numérico e o método de
aproximação assintótica, de modo a avaliar a acurácia do método utilizado. Tomando as
soluções para ε = 0.1 e ε = 0, temos
45

> eqd2
dτ 2y (τ) = − (1 + εy (τ))−2
A curva C1 obtida solução numérica para ε = 0.1 é dada por
> eqc1 := subs (ε = 0.1, eq)
icc := y (0) = 0,D (y) (0) = 1
> sn1 := dsolve(icc, eqc1, y(τ), numeric)
sn1 := proc (x_rkf45) ... endproc
> C1 := odeplot (sn1, [τ, y (τ)], 0 . . . 2, color = red, linestyle = dash)
C1 := PLOT (`...`)
A curva C2 obtida solução numérica para ε = 0 é dada por
> eqc2 := subs (ε = 0, eq)
eqc2 :=d2
dτ 2y (τ) = −1
> sn2 := dsolve ({icc, eqc2} , y (τ) , numeric)
sn2 := proc (x_rkf45) ... endproc
> C2 := odeplot (sn2, [τ, y (τ)], 0 . . . 2, linestyle = dot)
C2 := PLOT (`...`)
A curva C3 obtida solução aproximada para ε = 0.1 é dada por
> C3 := plot (subs (ε = 0.1, ya) , τ = 0 . . . 2, color = black, linestyle = solid)
C3 := PLOT (`...`)
> display ([C1, C2, C3])
46
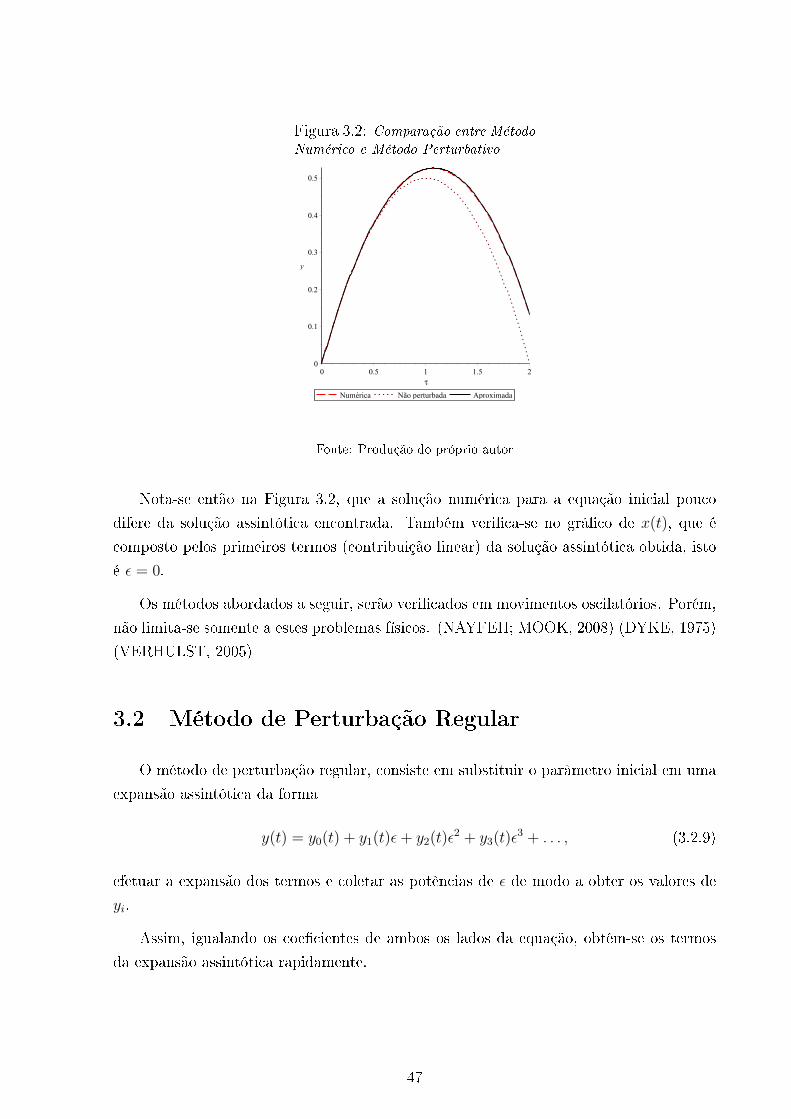
Figura 3.2: Comparação entre Método
Numérico e Método Perturbativo
Fonte: Produção do próprio autor
Nota-se então na Figura 3.2, que a solução numérica para a equação inicial pouco
difere da solução assintótica encontrada. Também veri�ca-se no grá�co de x(t), que é
composto pelos primeiros termos (contribuição linear) da solução assintótica obtida, isto
é ε = 0.
Os métodos abordados a seguir, serão veri�cados em movimentos oscilatórios. Porém,
não limita-se somente a estes problemas físicos. (NAYFEH; MOOK, 2008) (DYKE, 1975)
(VERHULST, 2005)
3.2 Método de Perturbação Regular
O método de perturbação regular, consiste em substituir o parâmetro inicial em uma
expansão assintótica da forma
y(t) = y0(t) + y1(t)ε+ y2(t)ε2 + y3(t)ε
3 + . . . , (3.2.9)
efetuar a expansão dos termos e coletar as potências de ε de modo a obter os valores de
yi.
Assim, igualando os coe�cientes de ambos os lados da equação, obtêm-se os termos
da expansão assintótica rapidamente.
47

3.2.1 Equação de Du�ng
Seja a equação de Du�ng, a qual descreve oscilações de sistemas conservativos com
único grau de liberdade (NAYFEH, 2011)
d2
dtx(t) + x(t) + εx(t)3 = 0, (3.2.10)
sendo t > 0, ε muito pequeno e condições iniciais x(0) = 1, x′(0) = 0.
De�nindo esta equação diferencial no Maple, temos
> eq := diff(x(t), t, t$2) + x (t) + ε (x (t))3 = 0
eq :=d2
dt2x (t) + x (t) + ε (x (t))3 = 0
Supondo que a solução seja dada na forma de uma expansão assintótica de ordem 3,
> xa := x0 (t) + x1 (t) ε+ x2 (t) ε2
xa := x0 (t) + x1 (t) ε+ x2 (t) ε2
Aplica-se xa na equação 3.2.10,
> eq1 := subs (x (t) = xa, eq)
eq1 :=∂2
∂t2(x0 (t) + x1 (t) ε+ x2 (t) ε
2)+ x0 (t) + x1 (t) ε+ x2 (t) ε
2+
ε(x0 (t) + x1 (t) ε+ x2 (t) ε
2)3
= 0
> eq2 := collect (expand (eq1) , ε)
eq2 := (x2(t))3ε7 + 3x1(t)(x2(t))
2ε6 +(3x0(t)(x2(t))
2 + 3(x1(t))2x2(t)
)ε5+
+(6x0(t)x1(t)x2(t) + (x1(t))
3)ε4 +
(3(x0(t))
2x2(t) + 3x0(t)(x1(t))2)ε3+
+
(x2 (t) +
d2
dt2x2 (t) + 3 (x0 (t))
2 x1 (t)
)ε2+
+
(d2
dt2x1 (t) + (x0 (t))
3 + x1 (t)
)ε+
d2
dt2x0 (t) + x0 (t) = 0
Após evidenciar as potências de ε, efetua-se a comparação dos coe�cientes de ε em
ambos os lados da equação. Isto é,
48

> ep0 := coeff (lhs (eq2) , ε, 0) = 0
ep0 :=d2
dt2x0 (t) + x0 (t) = 0
> ep1 := coeff (lhs (eq2) , ε, 1) = 0
ep1 :=d2
dt2x1 (t) + (x0 (t))
3 + x1 (t) = 0
> ep2 := coeff (lhs (eq2) , ε, 2) = 0
ep2 := x2 (t) +d2
dt2x2 (t) + 3 (x0 (t))
2 x1 (t) = 0
Avaliando as condições iniciais propostas, temos que
x(0) = x0(0) + x1(0)ε+ x2(0)ε2 = 1, (3.2.11)
x′(0) = x′0(0) + x′1(0)ε+ x′2(0)ε2 = 0. (3.2.12)
No Maple, de�nem-se então as seguintes condições iniciais
> ic0 := x0 (0) = 1,D (x0) (0) = 0
ic0 := x0 (0) = 1,D (x0) (0) = 0
> ic1 := x1 (0) = 0,D (x1) (0) = 0
ic1 := x1 (0) = 0,D (x1) (0) = 0
> ic2 := x2 (0) = 0,D (x2) (0) = 0
ic2 := x2 (0) = 0,D (x2) (0) = 0
as quais serão aplicada nas equações ep0, ep1 e ep2 a �m de obter os valores de x0, x1 e
x2. Isto é,
> se0 := dsolve ({ep0, ic0})
se0 := x0 (t) = cos (t)
49

> se1 := dsolve ({ic1, subs (x0 (t) = rhs (se0) , ep1)})
se1 := x1 (t) = −1
8cos (t) +
1
8(cos (t))3 − 3
8sin (t) t
> se2 := dsolve ({ic2, subs (x0 (t) = rhs (se0) , x1 (t) = rhs (se1) , ep2)})
se2 := x2 (t) =25
256cos (t)− 9
64(cos (t))2 sin (t) t+
33
256+
+ sin (t) t− 9
128cos (t) t2 +
1
64(cos (t))5 − 29
256(cos (t))3
Retornando a solução proposta, temos que a solução aproximada para equação (3.2.10)
é dada por:
> X := subs (x0 (t) = rhs (se0) , x1 (t) = rhs (se1) , x2 (t) = rhs (se2) , xa)
X := cos (t) +
(−1
8cos (t) +
1
8(cos (t))3 − 3
8sin (t) t
)ε+
+
(25
256cos (t)− 9
64(cos (t))2 sin (t) t+
33
256sin (t) t− 9
128cos (t) t2+
+1
64(cos (t))5 − 29
256(cos (t))3
)ε2
A �m de veri�car a acurácia da aproximação encontrada, pode-se compará-la a uma
solução obtida numericamente de�nido um valor para ε. Isto é, seja ε = 0.1, temos então
que
> eqn := subs (ε = 0.1, eq)
eqn :=d2
dt2x (t) + x (t) + 0.1 (x (t))3 = 0
> icn := x (0) = 1,D (x) (0) = 0
icn := x (0) = 1,D (x) (0) = 0
> sn := dsolve ({eqn, icn} , x (t) , numeric)
sn := proc (x_rkf45) ... endproc
> cn := odeplot (sn, [t, x (t)], 0..20, color = red, linestyle = dash)
cn := PLOT (`...`)
50

Aqui, denominou-se cn a curva gerada pela solução numérica a qual será comparada
gra�camente a solução aproximada para as três primeiras ordens. Ou seja,
> co1 := plot(subs (x0 (t) = rhs (se0) , x1 (t) = 0, x2 (t) = 0, ε = 0.1, xa) ,
t = 0..20, color = black, linestyle = dot)
co1 := PLOT (`...`)
> co2 := plot(subs(x0 (t) = rhs (se0) , x1 (t) = rhs (se1) , x2 (t) = 0, ε = 0.1,
xa), t = 0..20, color = black, linestyle = dashdot)
co2 := PLOT (`...`)
> co3 := plot(subs(x0(t) = rhs(se0), x1(t) = rhs(se1), x2(t) = rhs(se2),
ε = 0.1, xa), t = 0..20, color = black, linestyle = solid)
co3 := PLOT (`...`)
> display ([cn, co1], [cn, co2], [cn, co3])
Figura 3.3: Método Perturbativo Re-
gular - Aproximação de Ordem 1
Fonte: Produção do próprio autor
Figura 3.4: Método Perturbativo
Regular - Aproximação de Ordem 2
Fonte: Produção do próprio autor
51

Figura 3.5: Método Perturbativo Re-
gular - Aproximação de Ordem 3
Fonte: Produção do próprio autor
Nota-se que temos uma boa aproximação para t limitado, isto é, 0 < t e t < tk, e não
limitado como procuramos inicialmente. Isto ocorre devido chamados termos seculares,
que são termos onde a variável do tempo não esta presente apenas no argumento da função
trigonométrica e assim, o termo compromete a amplitude da solução aproximada.
Os termos seculares mostram que a expansão em (3.1.1) não tem sentido quando t
não é limitado. Porém, ao veri�car o grá�co o grá�co 3.5, é possível identi�car que, se
ε = 0.1, a aproximação obtida é boa para 0 < t < 20.
Ou seja, além de avaliar o limite de ε → 0, deve-se analisar o que ocorre quando
t→∞ para obter uma generalização da solução assintótica.
Como a equação de Du�ng com único grau de liberdade modela sistemas oscilatórios
conservativos, conforme veremos no capítulo seguinte, a presença destes termos seculares
tornam o sistema instável quando t→∞.
Portanto, na solução assintótica obtida veri�ca-se os seguintes termos que comprome-
tem a solução para ordem 2
xs1 = t3
8sin(t). (3.2.13)
Para ordem 3
xs2 = −t9
64cos(t)2 sin(t), (3.2.14)
52
xs3 = t33
256sin(t), e (3.2.15)
xs4 = −t29
128cos(t). (3.2.16)
Os termos seculares são responsáveis pela limitação no domínio da solução, ou seja,
são eles que comprometem o sentido da expansão encontrada quando t não for limitado.
3.3 Método de Lindstedt-Poicaré
Conforme visto anteriormente, o método de perturbação regular possui severas restri-
ções que só permitem aplicabilidade quando trata-se de domínios limitados e assim, não se
permite obter uma aproximação assintótica uniformemente válida para grandes intervalos
de tempo. No entanto, é possível realizar uma modi�cação do método de perturbação
regular, 'esticando' a coordenada do tempo de modo a eliminar os termos seculares. Ou
seja, supõe-se que a variável do tempo, seja dada da seguinte forma,
t = ωτ, (3.3.17)
sendo ω uma função de ε permitindo assim expansão em potências de ε da forma
t = (1 + εω1 + ε2ω2 + . . .)τ. (3.3.18)
Uma vez que foi sugerido tal alteração na escala temporal do problema em questão,
temos que os operadores lineares deverão ser modi�cados para atender tal mudança. Isto
é, pela Regra da Cadeia temos,
y(t) = y(ωτ), (3.3.19)
d
dty(t) =
d
dτy(ωτ) = ω
d
dty(t), (3.3.20)
d2
dt2y(t) = ω
d
dτy(ωτ) = ω2 d
2
dt2y(t). (3.3.21)
Assim, supõe-se a solução aproximada da forma já vista no método de perturbação
regular:
x(t) = x0(t) + x1(t)ε+ x2(t)ε2, (3.3.22)
e efetua-se as substituições na equação original, de modo que os termos seculares depen-
derão dos valores de ωi. Através deste método, é possível remover os termos seculares de
modo a obter uma solução aproximada de maior acurácia.
53

3.3.1 Equação de Du�ng
Tome novamente a Equação de Du�ng,
d2
dtx(t) + x(t) + ε3x(t) = 0 (3.3.23)
onde t > 0, ε pequeno e as condições iniciais são x(0) = 1 e x′(0) = 0.
No Maple a equação diferencial é de�nida por,
> eq := diff(x(t), t, t) + x (t) + ε (x (t))3 = 0
eq :=d2
dt2x (t) + x (t) + ε (x (t))3 = 0
Rede�nindo a escala de tempo, de acordo com (3.3.17), temos
> eq1 := ω2diff(x(t), t, t) + x (t) + ε (x (t))3 = 0
eq1 := ω2 d2
dt2x (t) + x (t) + ε (x (t))3 = 0
Por conveniência computacional, de�ne-se ω0 como uma série de potências de ε,
> ω0 := 1 + εω1 + ε2ω2
ω0 := 1 + εω1 + ε2ω2
Novamente, propõe-se a solução aproximada em série de potências de ε
> xa := x0 (t) + x1 (t) ε+ x2 (t) ε2
xa := x0 (t) + x1 (t) ε+ x2 (t) ε2
Substituindo os valores de ω0 e xa na equação original temos,
> eq2 := subs (x (t) = xa, ω = ω0, eq1)
eq2 :=(1 + εω1 + ε2ω2
)2 ∂2∂t2
(x0 (t) + x1 (t) ε+ x2 (t) ε
2)+
+ x0 (t) + x1 (t) ε+ x2 (t) ε2 + ε
(x0 (t) + x1 (t) ε+ x2 (t) ε
2)3
= 0
> eq3 := collect(expand (eval (eq2)) , ε)
eq3 := x2(t)3ε7 +
(ω22
d2
dt2x2(t) + 3x1(t)x2(t)
2
)ε6 +
(2ω1ω2
d2
dt2x2(t) + 3x1(t)
2x2(t)+
54

ω22
d2
dt2x1(t) + 3x0(t)x2(t)
2
)ε5 +
(ω22
d2
dt2x0(t) + x1(t)
3 + 2ω2d2
dt2x2(t) + ω2
1
d2
dt2x2(t)+
6x0(t)x1(t)x2(t) + 2ω1ω2d2
dt2x1(t)
)ε4 +
(3x0(t)
2x2(t) + ω21
d2
dt2x1(t) + 2ω1
d2
dt2x2(t)+
2ω1ω2d2
dt2x0(t) + 2ω2
d2
dt2x1(t) + 3x0(t)x1(t)
2
)ε3 +
(3x0(t)
2x1(t) + ω21
d2
dt2x0(t)+
2ω2d2
dt2x0(t) + x2(t) + 2ω1
d2
dt2x1(t) +
d2
dt2x2(t)
)ε2 +
(x1(t) + x0(t)
3+
2ω1d2
dt2x0(t) +
d2
dt2x1(t)
)ε+
d2
dt2x0(t) + x0(t) = 0
Uma vez determinada equação em potências, pode-se então, analisar os coe�cientes
de ε separadamente,
> ep0 := coeff (lhs (eq4) , ε, 0) = 0
ep0 := x0 (t) +d2
dt2x0 (t) = 0
> ep1 := coeff (lhs (eq4) , ε, 1) = 0
ep1 := x1 (t) + (x0 (t))3 +
d2
dt2x1 (t) + 2ω1
d2
dt2x0 (t) = 0
> ep2 := coeff (lhs (eq4) , ε, 2) = 0
ep2 :=d2
dt2x2 (t)+3 (x0 (t))
2 x1 (t)+ω12 d
2
dt2x0 (t) +2ω1
d2
dt2x1 (t)+x2 (t)+2ω2
d2
dt2x0 (t) = 0
Conforme as condições de contorno apresentadas no exemplo (3.3.1), temos
> ic0 := x0 (0) = 1,D (x0) (0) = 0
ic0 := x0 (0) = 1,D (x0) (0) = 0
> ic1 := x1 (0) = 0,D (x1) (0) = 0
ic1 := x1 (0) = 0,D (x1) (0) = 0
> ic2 := x2 (0) = 0,D (x2) (0) = 0
ic2 := x2 (0) = 0,D (x2) (0) = 0
55

Assim, é possível resolver as equações dos coe�cientes de ε da seguinte maneira,
> se0 := dsolve ({ep0, ic0})
se0 := x0 (t) = cos (t)
> se1 := dsolve ({ic1, subs (x0 (t) = rhs (se0) , ep1)})
se1 := x1 (t) =
(1
4− ω1
)cos (t) +
1
8(cos (t))3 +
1
8(8ω1 − 3) cos (t) + sin (t) t
(ω1 −
3
8
)
Como era de esperar, encontrou-se um termo secular na solução para ordem 1 em
> ts1 := sin (t) t(ω1 − 3
8
)ts1 := sin (t) t
(ω1 −
3
8
)
Ou seja, a �m de eliminar este termo secular, temos que ω1 − 38deve ser zero. Assim
> ω1 :=38
ω1 :=3
8
Para segunda ordem, temos
> se2 := dsolve ({ic2, subs (x0 (t) = rhs (se0) , x1 (t) = rhs (se1) , ep2)})
se2 := x2 (t) =
(1
64− ω2
)cos (t) +
1
64(cos (t))5 − 29
256(cos (t))3+
1
256(21 + 256ω2) cos (t) + sin (t) t
(21
256+ ω2
)Novamente, encontrou-se outro termo secular em
> ts2 := sin (t) t(
21256
+ ω2
)ts2 := sin (t) t
(21
256+ ω2
)
De modo que, para eliminar o termo secular, efetuamos
> ω2 := − 21256
ω2 := −21
256
Portanto, a solução aproximada para a equação x′′(t) + x′(t) + ε3x(t) = 0 é
56

> X := subs (x0 (t) = rhs (se0) , x1 (t) = rhs (se1) , x2 (t) = rhs (se2) , xa)
X := cos (t) +
(−1
8cos (t) +
1
8(cos (t))3
)ε+
(25
256cos (t) +
1
64(cos (t))5 − 29
256(cos (t))3
)ε2
A frequência associada à extensão realizada na coordenada do tempo é dada por,
ω0 = 1 +3
8ε− 21
256ε2
Uma vez encontrada a solução aproximada para a Equação de Du�ng, é possível
efetuar uma rápida comparação para com o método numérico uma vez de�nido um valor
para ε. Tomando ε = 1, temos
> ε := 1
ε := 1
> eqn := subs (ω = ω0, eq1)
eqn :=109561
65536
d2
dt2x (t) + x (t) + (x (t))3 = 0
> icn := x (0) = 1,D (x) (0) = 0
icn := x (0) = 1,D (x) (0) = 0
> sn := dsolve ({eqn, icn} , x (t) , numeric)
sn := proc (x_rkf45) ... endproc
> cn := odeplot (sn, [t, x (t)], 0..40, color = red, linestyle = dash)
cn := PLOT (`...`)
Aqui, denominou-se cn a curva gerada pela solução numérica a qual será comparada
à solução aproximada para as três primeiras ordens. Ou seja,
> co1 := plot(subs(x0 (t) = rhs (se0) , x1 (t) = 0, x2 (t) = 0, ε = 0.1, xa),
57

t = 0..40, color = black, linestyle = dot)
co1 := PLOT (`...`)
> co2 := plot(subs(x0 (t) = rhs (se0) , x1 (t) = rhs (se1) , x2 (t) = 0, ε = 0.1,
xa), t = 0..40, color = black, linestyle = dashdot)
co2 := PLOT (`...`)
> co3 := plot(subs(x0 (t) = rhs (se0) , x1 (t) = rhs (se1) , x2 (t) = rhs (se2) ,
ε = 0.1, xa), t = 0..40, color = black, linestyle = solid)
co3 := PLOT (`...`)
> display ([cn, co1], [cn, co2], [cn, co3])
Figura 3.6: Método de Lindsted-
Poincaré - Ordem 1
Fonte: Produção do próprio autor
Figura 3.7: Método de Lindsted-
Poincaré - Ordem 2
Fonte: Produção do próprio autor
58

Figura 3.8: Método de Lindsted-
Poincaré - Ordem 3
Fonte: Produção do próprio autor
Veri�ca-se então que, para um ε = 1 a solução de terceira ordem, conforme o grá�co
da Figura 3.8, é acurada até 10 segundos.
Se atribuirmos um valor menor para ε, por exemplo ε = 0.1, têm-se que a solução de
primeira ordem já oferece uma acurácia muito boa para um tempo relativamente grande,
conforme nos mostra o grá�co na Figura 3.9. Ou seja a aproximação de primeira ordem
já nos fornece boa acurácia sem que seja necessário restringir o domínio, isto é, t→∞.
Figura 3.9: Método de Lindsted-
Poincaré - Ordem 1 - ε = 0.1
Fonte: Produção do próprio autor
Figura 3.10: Método de Lindsted-
Poincaré - Ordem 2 - ε = 0.1
Fonte: Produção do próprio autor
59

Figura 3.11: Método de Lindsted-
Poincaré - Ordem 3 - ε = 0.1
Fonte: Produção do próprio autor
3.3.2 Limitações do método
Conforme (JAGER; FURU, 1996), o método de Lindstedt-Poicaré estudado possui
a vantagem de eliminar os termos seculares da expansão encontrada em problemas de
vibração e ondas descritos por equações diferenciais do tipo
d2
dtx(t) + αx(t)− εf(x) = 0, (3.3.24)
ou∂2
∂t2u(x, t)− β ∂2
∂x2u(x, t)− εf(x) = 0. (3.3.25)
No entanto, as di�culdades aumentam caso um pequeno amortecimento seja introdu-
zido nas equações, mesmo em um caso linear.
Exemplo 3.3.3 Analise a seguinte equação levemente amortecida
d2
dtx(t) + ε
d
dtx(t) + x(t) = 0 (3.3.26)
com t > 0, ε pequeno e as condições iniciais x(0) = 0 e x′(0) = a.
Aplicando o método de Lindstedt-Poincaré, temos,
> eq := diff(x(t), t$2) + εdiff(x(t), t) + x (t) = 0
eq :=d2
dt2x (t) + ε
d
dtx (t) + x (t) = 0
60

> ω0 := 1 + ω1ε+ ω2ε2
ω0 := 1 + ω1ε+ ω2ε2
> t := ω0τ
t :=(1 + ω1ε+ ω2ε
2)τ
Alterando os operadores diferenciais, de modo a adotar os valores de ω e propondo a
solução aproximada, temos
> eq1 := ω2diff(x(t), t$2) + εωdiff(x(t), t) + x (t) = 0
eq1 := ω2 d2
dt2x (t) + εω
d
dtx (t) + x (t) = 0
> xa := x0 (t) + x1 (t) ε+ x2 (t) ε2
xa := x0 (t) + x1 (t) ε+ x2 (t) ε2
Substitui-se então os valores de ω0 e xa na equação obtida após a alteração dos
operadores diferenciais
> eq2 := subs (x (t) = xa, ω = ω0, eq1)
eq2 :=(1 + ω1ε+ ω2ε
2)2 ∂2∂t2
(x0 (t) + x1 (t) ε+ x2 (t) ε
2)+
ε(1 + ω1ε+ ω2ε
2) ∂∂t
(x0 (t) + x1 (t) ε+ x2 (t) ε
2)+ x0 (t) + x1 (t) ε+ x2 (t) ε
2 = 0
Coletando os coe�cientes associados às potências de ε e igualando-os a zero:
> eq3 := collect (expand (eval (eq2)) , ε)
x2(t)3ε7 +
(3x1(t)x2(t)
2 + ω22
d2
dt2x2(t)
)ε6 +
(ω22
d2
dt2x1(t) + 3x0(t)x2(t)
2+
2ω1ω2d2
dt2x2(t) + 3x1(t)
2x2(t)
)ε5 +
(6x0(t)x1(t)x2(t) + ω2
2
d2
dt2x0(t)+
2ω2d2
dt2x2(t) + 2ω1ω2
d2
dt2x1(t) + x1(t)
3 + ω21
d2
dt2x2(t)
)ε4 +
(3x0(t)
2x2(t)+
2ω1ω2d2
dt2x0(t) + 2ω2
d2
dt2x1(t) + 2ω1
d2
dt2x2(t) + ω2
1
d2
dt2x1(t) + 3x0(t)x1(t)
2
)ε3+(
2ω1d2
dt2x1(t) + x2(t) + 3x0(t)
2x1(t) + diff(x2(t), t, t) + ω21
d2
dt2x0(t) + 2ω2
d2
dt2x0(t)
)ε2+
61

(x1(t) + x0(t)
3 + diff(x1(t), t, t) + 2ω1d2
dt2x0(t)
)ε+
d2
dt2x0(t) + x0(t) = 0
> ep0 := coeff (lhs (eq3) , ε, 0) = 0
ep0 := x0 (t) +d2
dt2x0 (t) = 0
> ep1 := coeff (lhs (eq3) , ε, 1) = 0
ep1 := 2ω1d2
dt2x0 (t) + x1 (t) +
d
dtx0 (t) +
d2
dt2x1 (t) = 0 (3.3.27)
> ep2 := coeff (lhs (eq3) , ε, 2) = 0
ep2 := 2ω1d2
dt2x1 (t) +
d2
dt2x2 (t) +
d
dtx1 (t) + ω1
d
dtx0 (t)+
+ω12 d
2
dt2x0 (t) + 2ω2
d2
dt2x0 (t) + x2 (t) = 0 (3.3.28)
Aplicando as condições iniciais fornecidas junto à equação (3.2.10), temos
> ic0 := x0 (0) = 0,D (x0) (0) = a
ic0 := x0 (0) = 0,D (x0) (0) = a
> ic1 := x1 (0) = 0,D (x1) (0) = 0
ic1 := x1 (0) = 0,D (x1) (0) = 0
> ic2 := x2 (0) = 0,D (x2) (0) = 0
ic2 := x2 (0) = 0,D (x2) (0) = 0
Selecionando os coe�cientes de ε, encontra-se os valores para xi(t).
> se0 := dsolve ({ep0, ic0})
se0 := x0 (t) = a sin (t)
> se1 := dsolve ({ic1, subs (x0 (t) = rhs (se0) , ep1)})
se1 := x1 (t) = ω1a sin (t) +1
2a cos (t)− 1
2a (cos (t) + sin (t) t+ 2 cos (t)ω1t)
62

Não é necessário calcular x2 através da equação (3.3.28) para concluir que para remo-
ver os termos seculares de x1, no caso 12at sin(t), é necessário que a = 0. No entanto, se
a = 0 o problema reduz-se à solução trivial x(t) = 0.
Avaliando os termos seculares at sin(t)2
e atω1 cos(t) encontrados na solução x1(t), a
presença de at a frente das funções trigonométricas se dá devido ao amortecimento da
equação inicial, como pode-se veri�car na equação (3.3.27) do desenvolvimento acima.
Comparando a solução aproximada de segunda ordem à solução numérica, tomando
a = 1 e ε = 0.1, temos
> eq := diff(x(t), t$2)) + ε(diff(x(t), t)) + x(t) = 0
eq :=d2
dt2x (t) + ε
d
dtx (t) + x (t) = 0
> a := 1; ε := .1
a := 1
ε := 0.1
As condições iniciais se tornam então
> ic := x (0) = 0,D (x) (0) = a
ic := x (0) = 0,D (x) (0) = 1
> sn := dsolve ({eq, ic} , x (t) , numeric)
sn := proc (x_rkf45) ... endproc
> cn := odeplot (sn, [t, x (t)], 0 . . . 40, color = red, linestyle = dash)
cn := PLOT (`...`)
Aqui, denominou-se cn a curva gerada pela solução numérica a qual será comparada
à solução aproximada para ordem 1. De�nindo os valores obtidos pela aproximação de
Lindsted-Poincaré, temos,
> x0 := a sin (t)
x0 := sin (t)
63

> x1 := collect (ω1a sin (t) + 1/2a cos (t)− 1/2a (cos (t) + t sin (t) + 2t cos (t)ω1) , t)
x1 := (−1/2 sin (t)− cos (t)ω1) t+ ω1 sin (t)
> se := solve (− sin (t)− 2 cos (t)ω1 = 0, ω1)
se := − sin (t)
2 cos (t)
Como o termo ω1 depende de t, esta não é uma aproximação válida para a solução nu-
mérica. Gra�camente, Figura 3.12, veri�ca-se a não aproximação da solução obtida pelo
método de Lindsted-Poincaré:
> x1 := subs (ω1 = se, x1)
x1 := −1/2(sin (t))2
cos (t)
> sa := x0 + εx1
sa := sin (t)− 0.05000000000(sin (t))2
cos (t)
> c1 := plot (sa, t = 0 . . . 40, color = black, linestyle = solid)
c1 := PLOT (`...`)
> display ([cn, c1])
Figura 3.12: Método de Lindsted-
Poincaré em Oscilador Amortecido -
Ordem 3 - ε = 0.1
Fonte: Produção do próprio autor
64

Deste modo, é interessante buscar métodos em que a inserção de um pequeno amor-
tecimento ao sistema não seja um obstáculo para obtenção de uma solução aproximada,
de acuracidade relativa.
3.4 Método de Múltiplas Escalas
Conforme visto anteriormente, ao aplicar o método de perturbação regular na equação
de Du�ng, por exemplo, encontra-se alguns termos seculares e estes podem ser removidos
através do Método de Lindsted-Poincaré, efetuando uma alteração na escala temporal.
Isto é, busca-se uma solução da forma x(t; ε), onde x depende de t e ε.
Deste modo, o método de múltiplas escalas consiste em generalizar o método de Linds-
tedt Poincaré, onde ao invés de tomar a solução inicial da forma x(t; ε), reestruturamos a
solução de modo que x = x̂(t, tε, tε2, . . .). Onde x̂ é uma função que depende de diferentes
escalas de tempo, t, tε, tε2, . . .. (NAYFEH, 2011)
Isto é, para ordens superiores, temos que x(t; ε), depende agora de uma combinação
de tε, tε2, tε3, . . .. Deste modo, temos
x(t; ε) = x̂(T0, T1, T2, . . . ; ε), (3.4.29)
sendo Tn de�nido por
T0 = t, T1 = tε, T2 = tε2, T3 = tε3, . . . (3.4.30)
A introdução de diferentes escalas de tempo pode parecer confusa a primeira vista.
Porém, é possível fazer uma rápida analogia aos ponteiros de um relógio analógico. Isto
é, seja ε = 160, temos
T0 = t, T1 =t
60, T2 =
t
3600, . . . , (3.4.31)
sendo T1, o valor observado no ponteiro dos minutos e T2 é o valor observado no ponteiro
das horas enquanto T0 representa os segundos. Assim, T0 representa uma rápida escala,
T1 uma escala devagar, T2 uma escala ainda mais lenta e assim por diante. Portanto,
desde que x dependa de diferentes escalas de tempo, imaginamos um relógio e tentamos
observar o comportamento de x nas diferentes escalas deste relógio.
Conforme visto no método de Lindsted-Poincaré, mudanças na variável levam a alte-
rações nos termos diferenciais da equação. Isto é, como t = T0+T1ε+T2ε2+ . . ., utilizando
a Regra da Cadeia, temos:
d
dt=
∂
∂T0+ ε
∂
∂T1+ ε2
∂
∂T2+ . . . (3.4.32)
65

d2
dt2=
∂2
∂T 20
+ 2ε∂2
∂T0∂T1+ ε2
(2
∂2
∂T0∂T2+
∂2
∂T 21
)+ . . . (3.4.33)
Assim, a substituição das condições propostas acima em uma equação diferencial, nos
remete a uma aparente complicação para a resolução da mesma, uma vez que partimos
de uma equação diferencial ordinária para uma equação diferencial parcial. Porém, as
complicações introduzidas por esta alteração são facilmente compensadas pelas vantagens.
O método não fornece apenas uma expansão uniforme mas, também fornece todas
as ressonâncias não lineares do sistema (NAYFEH, 2008). Assim, é possível veri�car o
método, aplicando-o a um oscilador amortecido.
3.4.1 Oscilador Amortecido
A seguinte equação diferencial que representa um oscilador levemente amortecido,
y′′(t) + εy′(t) + y(t) = 0, (3.4.34)
com condições iniciais
y(0) = 0, y′(0) = 1. (3.4.35)
Como a mudança de escala envolve diferentes variáveis de tempo (T0, T1), é possível
efetuar no Maple, as alterações na equação diferencial dada e nos operadores diferenciais
da seguinte maneira,
> eq0 :=(D(2)
)(y) (t) + ε
(D(1)
)(y) (t) + y (t) = 0
eq0 :=(D(2)
)(y) (t) + εD (y) (t) + y (t) = 0
> Ord := 1
> EscalaTempo := T0, T1
EscalaTempo := T0, T1
> dt[1] := expr → sum(εiDiff(expr, EscalaTempo[i+ 1]), i = 0..Ord)
dt1 := expr →Ord∑i=0
εi(
∂
∂EscalaTempoi+1
expr
)
66

> dt[2] := expr → value(dt[1](dt[1](expr)))
dt[2] := expr → value(dt[1](dt[1](expr)))
> temp := subs(y (t) = y (T0, T1) , seq((D(k)
)(y) (t) = dtk (y (T0, T1)) ,
k = 1 . . . 2), eq0)
temp :=∂2
∂T02y (T0, T1) + ε
∂2
∂T0∂T1y (T0, T1)+
ε
(∂2
∂T0∂T1y (T0, T1) + ε
∂2
∂T12y (T0, T1)
)+
ε
(∂
∂T0y (T0, T1) + ε
∂
∂T1y (T0, T1)
)+ y (T0, T1) = 0
Tem-se então que a equação diferencial fornecida inicialmente, pode ser expressa como,
> eq1 := expand (temp)
eq1 :=∂2
∂T02y (T0, T1) + 2ε
∂2
∂T0∂T1y (T0, T1) + ε2
∂2
∂T12y (T0, T1)+
ε∂
∂T0y (T0, T1) + ε2
∂
∂T1y (T0, T1) + y (T0, T1) = 0
A solução aproximada, pode ser obtida pelo método de perturbação regular, isto é,
> solap := y (T0, T1) = y0 (T0, T1) + εy1 (T0, T1)
solap := y (T0, T1) = y0 (T0, T1) + εy1 (T0, T1)
Substituindo a solução aproximada proposta na equação obtida após alterar os ope-
radores diferenciais eq1, pode-se coletar as potências de ε da seguinte maneira,
> eq2 := collect (expand (subs (solap, eq1)) , ε)
eq2 := . . .+
(2
∂2
∂T0∂T1y1 (T0, T1) +
∂
∂T1(y0 (T0, T1) + εy1 (T0, T1))
)ε2+
(+
∂2
∂T12y0 (T0, T1)
)ε2 +
(∂2
∂T02y1 (T0, T1) + 2
∂2
∂T0∂T1y0 (T0, T1)
)ε+(
+y1 (T0, T1) +∂
∂T0(y0 (T0, T1) + εy1 (T0, T1))
)ε+
∂2
∂T02y0 (T0, T1) + y0 (T0, T1) = 0
Tomando os coe�cientes das potências de ε desejadas para uma aproximação de se-
67

gunda ordem, ε0 e ε1, e igualando-os a zero, temos as seguintes equações,
> ep0 := diff(y0(T0, T1), T0$2) + y0 (T0, T1) = 0
ep0 :=∂2
∂T02y0 (T0, T1) + y0 (T0, T1) = 0
> ep1 := diff(y1(T0, T1), T0$2) + 2diff(y0(T0, T1), T0, T1) + y1(T0, T1)+
diff(y0(T0, T1), T0) = 0
ep1 :=∂2
∂T02y1 (T0, T1) + 2
∂2
∂T0∂T1y0 (T0, T1) + y1 (T0, T1) +
∂
∂T0y0 (T0, T1) = 0
Por conveniência computacional, convém efetuar uma alteração nas variáveis, de modo
a reduzir ep0 a uma equação diferencial ordinária. Isto é,
> ep00 := subs (y0 (T0, T1) = X0 (T0) , ep0)
ep00 :=d2
dT02X0 (T0) +X0 (T0) = 0
Assim, utilizando as condições iniciais informadas no exemplo, obtém-se
> ic0 := X0 (0) = 0,D (X0) (0) = 1
ic0 := X0 (0) = 0,D (X0) (0) = 1
> s0 := dsolve ({ep00, ic0})
s0 := X0 (T0) = sin (T0)
> y0 (T0, T1) := a (T1) sin (T0 + b (T1))
y0 (T0, T1) := a (T1) sin (T0 + b (T1))
Como a solução depende de T0 e T1, e T0 independe de T1, temos que a solução obtida
deve ser escrita na forma
y0(T0, T1) = a(T1)sin(T0 + b(T1)), (3.4.36)
onde a(T1) representa a variação na amplitude do sistema de forma lenta, visto a de-
pendência da amplitude para com T1. Além disso, temos b(T1) representando a fase do
sistema.
68

Para a equação ep1, obtida pelo o coe�ciente ε, temos
> ep1∂2
∂T02y1 (T0, T1) + 2
(d
dT1a (T1)
)cos (T0 + b (T1))−
2a (T1) sin (T0 + b (T1))d
dT1b (T1) + y1 (T0, T1) + a (T1) cos (T0 + b (T1)) = 0
Por conveniência, é interessante renomear alguns termos da seguinte maneira,
> ep10 := subs(y1 (T0, T1) = X1 (T0) ,
ddT1a (T1) = α, d
dT1b (T1) = β, ep1
)ep10 :=
d2
dT02X1 (T0) + 2α cos (T0 + b (T1))− 2a (T1) sin (T0 + b (T1)) β+
X1 (T0) + a (T1) cos (T0 + b (T1)) = 0
Com as condições iniciais, temos,
> ic1 := X1 (0) = 0,D (X1) (0) = −α
ic1 := X1 (0) = 0,D (X1) (0) = −α
> s1 := dsolve ({ep10, ic1})
s1 := X1 (T0) =
(−α +
1
2a (T1) β cos (b (T1)) +
1
2α sin (b (T1))
)sin (T0)+
+
(1
4a (T1) sin (b (T1))
)sin (T0) +
(1
2α cos (b (T1))
)cos (T0)+
+
(1
4a (T1) cos (b (T1))−
1
2a (T1) β sin (b (T1))
)cos (T0)+
+1
4(−4a (T1) βT0 − 2α− a (T1)) cos (T0 + b (T1))+
+1
2((−T0 + β) a (T1)− 2T0α) sin (T0 + b (T1))
Para eliminar termos seculares, evidencia-se a variável T0 da seguinte forma,
> s10 := collect (s1, T0)
s10 := X1 (T0) =
(− a (T1) cos (T0 + b (T1)) β+
1
2(−2α− a (T1)) sin (T0 + b (T1))
)T0 +
(− α +
1
2a(T1)β cos(b(T1))+
69

1
2α sin(b(T1)) +
1
4a(T1) sin(b(T1))
)sin(T0) +
(1
2α cos(b(T1)) +
1
4a(T1) cos(b(T1))−
1
2a(T1)β sin(b(T1))
)cos(T0) +
(1
4(−2α− a(T1))
)cos(T0 + b(T1))+
1
2a(T1) sin(T0 + b(T1))β
Uma vez que foi evidenciada a escala temporal T0, identi�ca-se claramente os termos
seculares. Eles podem ser eliminados da mesma forma que �zemos no método de Lindsted-
Poincaré. Logo, com auxílio das condições inicias, temos
> β := 0
β := 0
> b (T1) := 0
b (T1) := 0
> ts1 := −2α− a (T1) = 0
ts1 := −2α− a (T1) = 0
> α := diff(a (T1) , T1)
α :=d
dT1a (T1)
> icts1 := a (0) = 1
icts1 := a (0) = 1
> s11 := dsolve ({icts1, ts1})
s11 := a (T1) = e−12T1
Uma vez encontrado os valores de a(T1) e b(T1), retorna-se as equações das soluções
y0(T0, T1) e y1(T0, T1) de modo a obter as soluções de primeira e segunda ordem da equação
inicialmente proposta.
> y0 (T0, T1) := a (T1) sin (T0 + b (T1))
y0 (T0, T1) := e−12T1 sin (T0)
70

> y1 (T0, T1) := rhs (s10)
y1 (T0, T1) :=1
2e−
12T1 sin (T0)
Assim, a solução para o problema proposto em função de T0 e T1 é dada por
> aux := y0 (T0, T1) + εy1 (T0, T1)
aux := e−12T1 sin (T0) +
1
2εe−
12T1 sin (T0)
e portanto, como ambos T0 e T1 dependem de t, a solução y(t) é
> y (t) := subs (T0 = t, T1 = ε · t, aux)
y (t) := e−12ε t sin (t) +
1
2ε e−
12ε t sin (t)
Pode-se efetuar uma comparação entre a solução aproximada encontrada e a solução
numérica da equação inicial, do seguinte modo
> ε := 0.1
ε := 0.1
> eq :=(D(2)
)(y) (t) + εD (y) (t) + y (t) = 0
eq :=(D(2)
)(y) (t) + 0.1D (y) (t) + y (t) = 0
> icn := y (0) = 0,D (y) (0) = 1
icn := y (0) = 0,D (y) (0) = 1
> sn := dsolve ({eq, icn} , y (t) , numeric)
sn := proc (x_rkf45) ... endproc
> cn := odeplot (sn, [t, y (t)], 0 . . . 20, color = red, linestyle = dash)
cn := PLOT (`...`)
Aqui, denominou-se cn a curva gerada pela solução numérica a qual será comparada
à solução aproximada para as duas primeiras ordens. Ou seja,
71

> sao2 := e−12εt sin (t) + 1
2εe−
12εt sin (t)
sao2 := 1.050000000e−0.05000000000t sin (t)
> sao1 := e−12εt sin (t)
sao1 := e−0.05000000000t sin (t)
> co2 := plot (sao2, t = 0 . . . 20, color = black, linestyle = solid)
c2 := PLOT (`...`)
> co1 := plot (sao1, t = 0 . . . 20, color = black, linestyle = solid)
c1 := PLOT (`...`)
> c3 := plot(1.05e−0.5t, t = 0..40, color = black, linestyle = dot)
c3 := PLOT (`...`)
> display([cn, c1, c3]); display([cn, c2, c3])
Figura 3.13: Método de Múltipla Es-
cala - Oscilador Amortecido Ordem 2
- ε = 0.1
Fonte: Produção do próprio autor
Figura 3.14: Método de Múltipla
Escala - Oscilador Amortecido Or-
dem 1 - ε = 0.1
Fonte: Produção do próprio autor
Com os resultados obtidos para o sistema oscilatório levemente amortecido, nota-se
que nem sempre é conveniente desenvolver a aproximação para maior ordem.
72

Figura 3.15: Método de Múltipla Es-
cala - Oscilador Amortecido Ordem 2
- ε = 0.5
Fonte: Produção do próprio autor
Figura 3.16: Método de Múltipla
Escala - Oscilador Amortecido Or-
dem 1 - ε = 0.5
Fonte: Produção do próprio autor
Conforme veri�ca-se nas Figuras 3.13 e 3.15, a aproximação de primeira ordem melhor
convém à solução numérica obtida, visto que a aproximação de segunda ordem compro-
mete a amplitude da oscilação.
3.5 Método de Ponderação
3.5.1 Variação de parâmetros
Para descrever o Método de Ponderação, é necessário que seja realizado uma vari-
ação nos parâmetros obtidos na solução não perturbada da equação diferencial inicial.
(NAYFEH, 2011)
Para exempli�car o desenvolvimento do método de variação de parâmetros será utili-
zado o oscilador descrito pela Equação de Du�ng (3.2.10) estudado nos métodos anteri-
ores, onde constatou-se a seguinte solução particular quando ε = 0,
x(t) = α cos(t+ β), (3.5.37)
onde α e β são constantes, os quais algumas vezes são referidos como parâmetros, de�nidas
pelas condições de contorno do problema em questão.
73

Derivando em relação à t obtemos
x′(t) = −α sin(t+ β). (3.5.38)
Assumindo que ε 6= 0, a solução da equação de (3.2.10) obtida no método de pertur-
bação regular continua sendo (3.5.37), porém, com α e β variando conforme o tempo.
Então, pode-se reconsiderar a solução (3.5.37) como uma transformação de x(t) em
α(t) e β(t), ou seja, uma variação nos parâmetros.
Avaliando as equações (3.2.10) e (3.5.37), encontra-se três termos desconhecidos x(t),
α(t) e β(t). Então pode-se impor uma terceira condição independente das equações, para
solucionar os termos de modo que esta arbitrariedade na escolha da terceira condição pode
ser utilizada como vantagem, a �m de produzir uma simples e conveninente transformação.
Pode-se escolher então, a equação (3.5.38) como condição adicional, assumindo que
x(t) e x′(t) possuem a mesma forma para o caso linear. Esta condição nos leva a uma
conveniente transformação, uma vez que conduz de um conjunto de equações de primeira
ordem, ao conjunto de equações de segunda ordem para α(t) e β(t).
Diferenciando (3.5.37) e assumindo que α e β são funções de t, pela Regra da Cadeia,
x′(t) = −α(t) sin(t+ β(t)) + α′(t) cos(t+ β(t))− β′(t)α(t) sin(t+ β(t)). (3.5.39)
Comparando esta equação com (3.5.38), temos que
α′(t) cos(t+ β(t))− β′(t)α(t) sin(t+ β(t)) = 0, (3.5.40)
diferenciando (3.5.38), temos
x′′(t) = −α(t) cos(t+ β(t))− α′(t) cos(t+ β(t))− β′(t)α(t) sin(t+ β(t)). (3.5.41)
Assim, substituindo x(t) e x′(t) na equação original (3.2.10), obtém-se
α(t) cos(t+ β(t))− α′(t) cos(t+ β(t))− β′(t)α(t) sin(t+ β(t))+
α(t) cos(t+ β(t)) + ε(α(t) cos(t+ β(t)))3 = 0, (3.5.42)
isto é,
α′(t) cos(t+ β(t))− β′(t)α(t) sin(t+ β(t)) = α3(t) cos3(t+ β(t)). (3.5.43)
74

Nota-se que (3.5.40) e (3.5.43) compõem um sistema de duas equações de primeira
ordem para α′(t) e β′(t). Assim, é possível simpli�cá-las efetuando a multiplicação de
(3.5.40) por α(t) cos(t + β(t)) e (3.5.43) por α(t) sin(t + β(t)), e somando as equações
temos
α′(t) = εα2(t) cos4(t+ β(t)), (3.5.44)
e substitindo (3.5.44) em (3.5.40) conseguimos determinar
β′(t) = εα2(t) cos4(t+ β(t)). (3.5.45)
Assim, encontra-se x(t) facilmente através de (3.5.37), uma vez que os valores α e β
são determinados pelas equações diferenciais (3.5.44) e (3.5.45).
3.5.2 Descrição do método
Uma vez efetuada a variação de parâmetros e obtido as equações para encontrar os
valores de α(t) e β(t), temos que as funções trigonométricas podem ter suas potências
reduzidas através de relações trigonométricas como
cos2(θ) =1 + cos(2θ)
2(3.5.46)
sin2(θ) =1− cos(2θ)
2(3.5.47)
e assim, utilizando novamente a Equação de Du�ng para auxiliar o desenvolvimento do
método, temos que as equações (3.5.44) e (3.5.45) podem ser reescritas como
α′(t) =1
8εα3(t)(2 cos(2θ) + sin(4θ)), (3.5.48)
β′(t) =1
8εα2(t)(3 + 4 cos(2θ) + cos(4θ)), (3.5.49)
onde θ(t) = t+ β(t).
Uma vez que 1 ≤ sinnθ ≤ 1 e −1 ≤ cosnθ ≤ 1, α′(t) = β′(t) = O(ε) se α(t) for
limitado. E assim, os termos principais de α(t) e β(t) variam de forma devagar quando
ε for pequeno. Ou seja, eles mudam muito pouco durante um intervalo de π, período
da função trigonométrica, e para uma primeira aproximação podem ser considerados
constantes num intervalo [0, π].
Assim, é possível tirar uma média aritmética de ambos os lados das equações (3.5.48)
e (3.5.49) num intervalo de [0, π], da seguinte forma
75

1
π
∫ π
0
α′(t) =1
8πε
∫ π
0
α3(t)(2 cos(2θ) + sin(4θ))dt (3.5.50)
1
π
∫ π
0
β′(t) =1
8πε
∫ π
0
α2(t)(3 + 4 cos(2θ) + cos(4θ))dt. (3.5.51)
Então, desde que α(t) e β(t) possam ser consideradas constantes no intervalo [0, π],
α(t), α′(t) e β′(t) podem ser retiradas da integral. Além disto, como θ(t) = t+β(t) e β(t)
também é constante, dt = dθ. Então
α′(t) =1
8πεα3(t)
∫ π+β(t)
β(t)
(2 cos(2θ) + sin(4θ))dθ
=1
8πεα3(t)
(2 cos(2θ) +
1
4sin(4θ)
) ∣∣∣∣π+β(t)β(t)
= 0 (3.5.52)
β′(t) =3
8πεα2(t) +
1
8πεα2(t)
∫ π+β(t)
β(t)
(cos(2θ) + cos(4θ))dt
=3
8πεα2(t) +
1
8πεα2(t)
(2 sin(2θ) +
1
4sin(4θ)
) ∣∣∣∣π+β(t)β(t)
=3
8πεα2(t). (3.5.53)
Ou seja, temos novamente duas equações diferenciais para obtenção de uma aproxi-
mação de primeira ordem para o sistema. Este método é comumente referenciado como
método de van der Pol, ou método de Krylov-Bogoliubov. (NAYFEH; MOOK, 2008)
Convém avaliar agora, o mesmo método e sua resolução com auxílio do Maple.
3.5.3 Equação de van der Pol
Seja um oscilador forçado descrito pela equação de van der Pol,
d2
dt2x(t) + x(t) = ε(1− x2(t)) d
dtx(t), (3.5.54)
onde x(0) = 1 e x′(0) = 0.
> eq := d2
dt2x (t) + x (t) = ε
(1− (x (t))2
)ddtx (t)
eq :=d2
dt2x (t) + x (t) = ε
(1− (x (t))2
) ddtx (t)
76

> eq0 := subs (ε = 0, eq)
eq0 :=d2
dt2x (t) + x (t) = 0
> ic := x (0) = 1,D (x) (0) = 0
ic := x (0) = 1,D (x) (0) = 0
> X := dsolve ({eq0, ic})X := x (t) = cos (t)
Portanto, a função que satisfaz a equação não perturbada é x(t) = cos(t). Conforme
veri�cado anteriormente, efetuamos a variação de parâmetros da seguinte forma,
> X := x (t) = a cos (t+ b)
X := x (t) = a cos (t+ b)
> dX := diff(X), t
dX :=d
dtx (t) = −a sin (t+ b)
Supõe-se então, que a solução da equação ainda seja dada por X, porém com a e b
variando com o tempo. Isto é,
> vp := a = a (t) , b = b (t)
vp := a = a (t) , b = b (t)
> Xt := subs (vp,X)
Xt := x (t) = a (t) cos (t+ b (t)) (3.5.55)
Diferenciando a equação (3.5.55), temos,
> dXte := subs (vp, dX)
dXte :=d
dtx (t) = −a (t) sin (t+ b (t))
77

> dXt := combine(ddtXt)
dXt :=d
dtx (t) =
(d
dta (t)
)cos (t+ b (t))− a (t) sin (t+ b (t))− a (t) sin (t+ b (t))
d
dtb (t)
É importante ressaltar que buscamos uma diferença entre Xt′(t) o qual foi nomeado
de dXt, onde a e b variam com o tempo; e X ′(t) o qual foi nomeado de dXte e a e b são
constantes. Ou seja,
> eq1 := dXt− dXte
eq1 := 0 =
(d
dta (t)
)cos (t+ b (t))− a (t) sin (t+ b (t))
d
dtb (t)
Diferenciando novamente Xt, temos
> ddXte := combine (diff(Xt, t$2))
ddXte :=d2
dt2x (t) = −
(d
dta (t)
)sin (t+ b (t))− a (t) cos (t+ b (t))−
a (t) cos (t+ b (t))d
dtb (t)
e assim, é possível agora substituir os valores encontrados de Xt, dXtee ddXte na equação
original,
> eq2 := combine (subs (ddXte, dXte,Xt, eq))
eq2 := −(d
dta (t)
)sin (t+ b (t))− a (t) cos (t+ b (t))
d
dtb (t) = −
εa (t) sin (t+ b (t)) +1
4ε (a (t))3 sin (3t+ 3b (t)) +
1
4ε (a (t))3 sin (t+ b (t))
Resolvendo o o sistema de equações (eq1 e eq2), para os valores de ddta(t) e d
dtb(t),
obtemos
> eq3 := solve({eq1, eq2} , d
dt({a (t) , b (t)})
)eq3 :=
{d
dta (t) = −
ε(a (t) sin (t+ b (t)) (a (t))2 sin (t+ b (t))
)4((cos (t+ b (t)))2 + (sin (t+ b (t)))2
) −ε((sin (t+ b (t)) + (a (t))2 sin (3t+ 3b (t))
) )(cos (t+ b (t)))2 + (sin (t+ b (t)))2
,
d
dtb (t ) = −ε cos (t+ b (t)) (a (t))2 sin (t+ b (t))
4(((cos (t+ b (t)))2 + (sin (t+ b (t)))2
))−
78

ε(sin (t+ b (t)) + (a (t))2 sin (3t+ 3b (t))
)(cos (t+ b (t)))2 + (sin (t+ b (t)))2
}Uma vez efetuada a variação nos parâmetros, podemos calcular os valores para ampli-
tude e fase da oscilação, para a solução inicial proposta (x(t) = a(t) cos(t+ b(t)). Então,
temos
> amplitude := combine (eq31)
amplitude :=d
dta (t) = −1
8ε (a (t))3 +
1
2εa (t)−
1
2εa (t) cos (2t+ 2b (t)) +
1
8ε (a (t))3 cos (4t+ 4b (t))
> fase := combine (eq32)
fase :=d
dtb (t) = −1
4ε (a (t))2 sin (2t+ 2b (t))+
1
2ε sin (2t+ 2b (t))− 1
8ε (a (t))2 sin (4t+ 4b (t))
Assim, para a(t) e b(t) constantes no intervalo [0, π], temos que,
> ctes := a (t) = α, b (t) = β
ctes := a (t) = α, b (t) = β
> ampD := rhs (subs (ctes, amplitude))
ampD := −1
8εα3 +
1
2εα− 1
2εα cos (2t+ 2β) +
1
8εα3 cos (4t+ 4β)
> fasD := rhs (subs (ctes, fase))
fasD := −1
4εα2 sin (2t+ 2β) +
1
2ε sin (2t+ 2β)− 1
8εα2 sin (4t+ 4β)
Logo, efetuando a média de ambos os lados da equação para cada instante (dt), no
intervalo[0, π], temos
> IampD := expand(
1Piint(ampD, t = 0..P i)
)IampD := −1
8εα3 +
1
2εα
79

> IfasD := expand(
1Piint(fasD, t = 0..P i)
)IfasD := 0
Retomando novamente às equações originais da amplitude e fase, temos
> eqa := lhs (amplitude) = subs (α = a (t) , IampD)
eqa :=d
dta (t) = −1
8ε (a (t))3 +
1
2εa (t)
> eqb := lhs (fase) = subs (β = b (t) , IfasD)
eqb :=d
dtb (t) = 0
É possível resolver as equações diferenciais, usando as condições iniciais propostas no
problema, isto é,
> sa := dsolve ({eqa, a (0) = 1} , a (t))
sa := a (t) = 2(√
1 + 3e−εt)−1
> sb := dsolve ({eqb, b (0) = 0} , b (t))
sb := b (t) = 0
Assim, retomando a solução proposta inicialmente x(t) = a(t) cos(t+ b(t)), temos
> sap := subs (sa, sb,Xt)
sap := x (t) = 2cos (t)√1 + 3e−εt
Pode-se então efetuar uma comparação rápida, do resultado obtido pelo Método de
Ponderação com o a solução obtida por Método Numérico para equação diferencial.
> with(plots) :
> eqd2
dt2x (t) + x (t) = ε
(1− (x (t))2
) ddtx (t)
> ic
x (0) = 1,D (x) (0) = 0
80
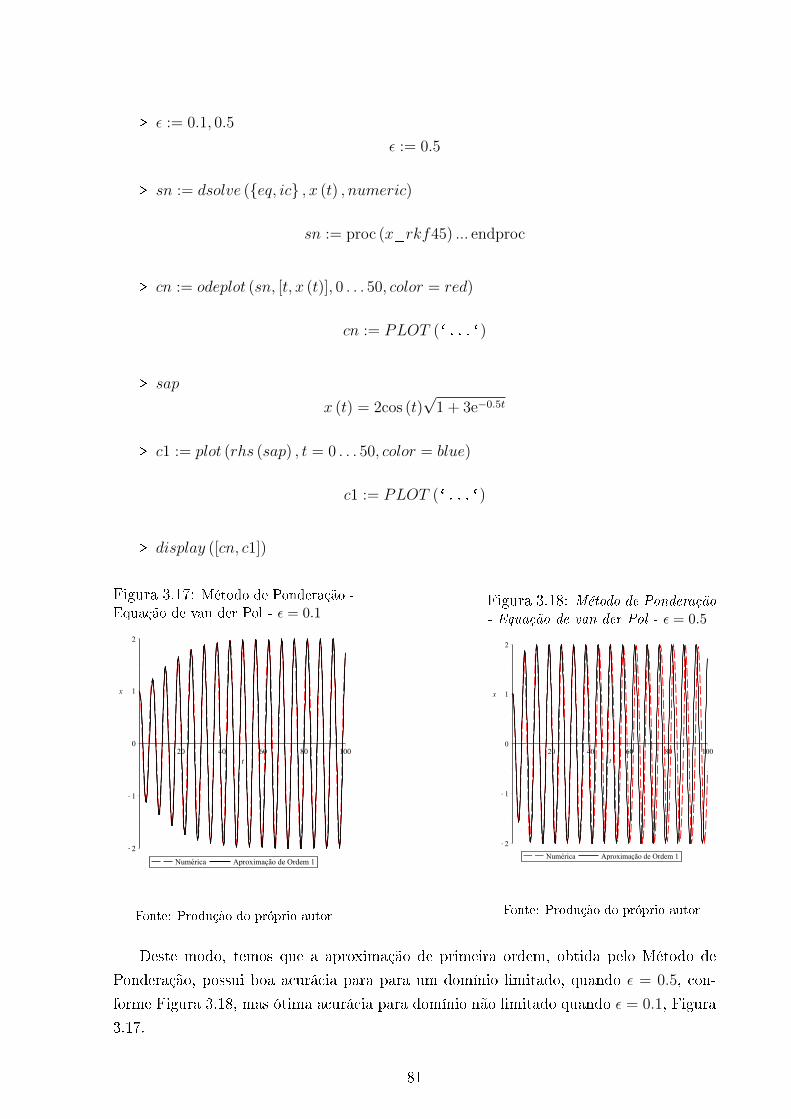
> ε := 0.1, 0.5
ε := 0.5
> sn := dsolve ({eq, ic} , x (t) , numeric)
sn := proc (x_rkf45) ... endproc
> cn := odeplot (sn, [t, x (t)], 0 . . . 50, color = red)
cn := PLOT (`...`)
> sap
x (t) = 2cos (t)√1 + 3e−0.5t
> c1 := plot (rhs (sap) , t = 0 . . . 50, color = blue)
c1 := PLOT (`...`)
> display ([cn, c1])
Figura 3.17: Método de Ponderação -
Equação de van der Pol - ε = 0.1
Fonte: Produção do próprio autor
Figura 3.18: Método de Ponderação
- Equação de van der Pol - ε = 0.5
Fonte: Produção do próprio autor
Deste modo, temos que a aproximação de primeira ordem, obtida pelo Método de
Ponderação, possui boa acurácia para para um domínio limitado, quando ε = 0.5, con-
forme Figura 3.18, mas ótima acurácia para domínio não limitado quando ε = 0.1, Figura
3.17.
81

3.5.4 Ciclos Limites de van der Pol
Seguindo a invenção do tubo de vácuo triodo, o qual produz uma oscilação auto-
excitada com amplitude constante, van der Pol obteve a equação descrita no Exemplo
3.5.3. (LYNCH, 2001)
Uma análise assintótica nos descreve qual o ciclo limite para a oscilação de van der Pol.
Isto é, se for efetuada uma expansão uniforme na equação (3.5.54), é possível identi�car
os termos seculares e avaliar o ciclo limite.
O ciclo limite é uma solução periódica aproximada por uma solução numérica. Assim,
uma vez que identi�cado o termo correspondente a oscilação do sistema, temos que sua
amplitude será o ciclo limite do sistema. (NAYFEH, 2011)
Efetuando a expansão em Maple, temos
> eq := diff(x(t), t, t) + x(t) = ε(1− x(t)2)(diff(x(t), t))
eq :=d2
dt2x (t) + x (t) = ε
(1− (x (t))2
) ddtx (t)
Sugere-se então uma aproximação de segunda ordem para a solução da equação. Isto
é,
> ser := x (t) = x0 (t) + εx1 (t)
ser := x (t) = x0 (t) + εx1 (t)
Rearranjando a equação e evidenciando as potências de ε, temos
> eqc1 := subs (ser, eq)
eqc1 :=∂2
∂t2(x0 (t) + εx1 (t)) + x0 (t) + εx1 (t) = +
ε(1− (x0 (t) + εx1 (t))2
) ∂∂t
(x0 (t) + εx1 (t))
> eqc2 := combine (expand (eqc1))
eqc2 :=d2
dt2x0 (t) + ε
d2
dt2x1 (t) + x0 (t) + εx1 (t) = ε
d
dtx0 (t) + ε2
d
dtx1 (t)−
ε (x0 (t))2d
dtx0 (t) − (x0 (t))2 ε2
d
dtx1 (t)− 2x0 (t) ε2x1 (t)
d
dtx0 (t)−
2x0 (t) ε3x1 (t)d
dtx1 (t)− ε3 (x1 (t))2 d
dtx0 (t) − ε4 (x1 (t))2 d
dtx1 (t)
82

> eqc3 := collect (lhs (eqc2)− rhs (eqc2) = 0, ε)
eqc3 := ε4 (x1 (t))2d
dtx1 (t) +
(2x0 (t)x1 (t)
d
dtx1 (t) + (x1 (t))2
d
dtx0 (t)
)ε3+
(− d
dtx1 (t) + (x0 (t))2
d
dtx1 (t) + 2x0 (t)x1 (t)
d
dtx0 (t)
)ε2+
+
(d2
dt2x1 (t) + x1 (t)− d
dtx0 (t) + (x0 (t))2
d
dtx0 (t)
)ε+
d2
dt2x0 (t) + x0 (t) = 0
Como interessa somente expansões até segunda ordem, temos as seguintes equações,
> eqs0 := coeff (lhs (eqc3) , ε, 0) = 0
eqs0 :=d2
dt2x0 (t) + x0 (t) = 0
> eqs1 := coeff (lhs (eqc3) , ε, 1) = 0
eqs1 :=d2
dt2x1 (t) + x1 (t)− d
dtx0 (t) + (x0 (t))2
d
dtx0 (t) = 0
A solução para x0 será,
> s0 := dsolve ({eqs0, x0 (0) = 1,D (x0) (0) = 0} , x0 (t))
s0 := x0 (t) = cos (t)
Busca-se em uma generalização para a solução da equação, reescrevendo a solução
encontrada com uma amplitude e fase. Isto é,
> s0 := x0 (t) = a cos (t+ b)
s0 := x0 (t) = a cos (t+ b)
Aplicando a solução x0 a equação correspondente a segunda ordem de aproximação e
rearranjando-a de modo a evidenciar os termos seculares, temos,
> s1 := dsolve ({subs (s0, eqs1) , x1 (0) = 0,D (x1) (0) = 0} , x1 (t))
s1 := x1 (t) =
(3
32a3 cos (3b) +
1
16a3 cos (b)− 1
4a cos (b)
)sin (t)+
(1
32a3 sin (3b)− 1
16a3 sin (b) +
1
4a sin (b)
)cos (t)−
83

1
8
(1
4a2 sin (3b+ 3t) + (a+ 2) (a− 2)
(−1
2sin (t+ b) + t cos (t+ b)
))a
> xap := collect (combine (subs (s0, s1, ser)) , t)
xap := x (t) =
(−1
8εa3 cos (t+ b) +
1
2εa cos (t+ b)
)t+ . . .
Assim, é possível identi�car possíveis valores de a para eliminar os termos seculares.
Ou seja,
> ts0 := −18a3 + 1
2a = 0
ts0 := −1
8a3 +
1
2a = 0
> ts1 := solve (ts0, a)
ts1 := 0, 2,−2
> xap := collect (subs (a = ts12, xap) , ε)
xap := x (t) =
(1
2sin (3b+ t)− 1
4sin (3b− t)− 1
4sin (3b+ 3t)
)ε+ 2 cos (t+ b)
A análise assintótica mostra que a amplitude máxima do sistema é descrita pelo valor
absoluto de a. Portanto, é possível efetuar uma comparação entre a análise assintótica
realizada acima e uma análise qualitativa. (LYNCH, 2001)
Reescrevendo-a de modo a criar um sistema planar, para que possamos analisar o
ciclo limite da (3.5.54) isto é,
d
dtx(t) = y(t), (3.5.56)
d
dty(t) = ε
(1− x2(t)
)y(t)− x(t). (3.5.57)
Assim, torna-se possível ter um quadro da fase do sistema, isto é, veri�car através do
plano (x,y) a incidência de um limite para a amplitude da oscilação. Em Maple, temos
> with(DEtools) :
> eqx := diff(x(t), t) = y (t)
eqx :=d
dtx (t) = y (t)
84

> eqy := diff(y(t), t) = ε(1− (x (t))2
)y (t)− x (t)
eqy :=d
dty (t) = ε
(1− (x (t))2
)y (t)− x (t)
> siscl := eqx, eqy
siscl :=d
dtx (t) = y (t) ,
d
dty (t) = ε
(1− (x (t))2
)y (t)− x (t)
> ε := 0.1
ε := 0.1
> DEplot([siscl], [x(t), y(t)], t = 0..60, [[x(0) = 1, y(0) = 0]], x = −3..3,
y = −3..3, stepsize = .1, linecolor = red, thickness = 1)
Figura 3.19: Ciclo Limite para o Os-
cilador de van der Pol - ε = 0.1
Fonte: Produção do próprio autor
Figura 3.20: Ciclo Limite para o
Oscilador de van der Pol - ε = 0.5
Fonte: Produção do próprio autor
Ou seja, a Figura 3.19 nos mostra que, para um erro pequeno de ε = 0.1, a trajetória
do oscilador para em uma assíntota circular de raio aproximadamente 2. Este é um
exemplo de um sistema o qual a solução depende diretamente de diferentes escalas, uma
cossenoidal responsável pela oscilação e outra responsável pelo acréscimo na amplitude
do sistema.
A solução obtida utilizando o Método de Ponderação, já nos fornece o acréscimo para
a amplitude em relação ao tempo. Assim, a contribuição para o acréscimo da amplitude
da oscilação é dado por
A =2√
1 + 3e−εt. (3.5.58)
85

Figura 3.21: Ciclo Limite para o Os-
cilador de van der Pol - ε = 1
Fonte: Produção do próprio autor
86
CONCLUSÃO
Este trabalho teve como objetivo explorar de forma introdutória, problemas típicos de
perturbação de equações algébricas e diferenciais utilizando computação simbólica, com
o uso do software Maple. Esta é uma poderosa ferramenta de análise comparativa entre
os resultados obtidos através dos métodos perturbativos e métodos numéricos permitindo
não somente comparação de resultados, como exibição de grá�cos gerados por ambos.
Apesar de apresentar os métodos mais usuais e comumente utilizados para resolução de
equações diferencias, este trabalho pode ser estendido ao estudo de outros métodos como
Matched Asymptotic Expansions e WKB. Embora tenha-se explorados apenas equações
diferenciais não-lineares clássicas, os métodos aqui apresentados podem ser facilmente
aplicados a diversos tipos de problemas de matemática aplicada envolvendo perturbações
de problemas dinâmicos.
O método de múltipla escala e o método de ponderação, foram mais detalhadamente
estudados. De fato, estes métodos são os mais difundidos quando o tema é métodos
perturbativos em equações diferenciais. (NAYFEH, 2008)
Apesar do estudo aqui realizado não efetuar qualquer contribuição original, a abor-
dagem realizada utilizando de computação simbólica, tem importância pedagógica para
estudantes Matemática Aplicada, Física e Engenharias.
87

REFERÊNCIAS
BENDER, C. Mathematical Physics 01 - Carl Bender. 2011/2012.
Acessado em: Agosto a Novembro de 2012. Disponível em:
<http://www.youtube.com/watch?v=LYNOGk3ZjFM>.
BENDER, C.; ORSZAG, S. Advanced Mathematical Methods for Scientists and Engineers
I: Asymptotic Methods and Perturbation Theory. [S.l.]: Springer, 1999. (Advanced
Mathematical Methods for Scientists and Engineers). ISBN 9780387989310.
BOYCE, W.; DIPRIMA, R. Elementary Di�erential Equations and Boundary Value
Problems. [S.l.]: John Wiley & Sons, 2012. ISBN 9780470458310.
DYKE, M. V. Perturbation methods in �uid mechanics. [S.l.]: Parabolic Press, 1975.
ISBN 9780915760015.
HINCH, E. Perturbation Methods. [S.l.]: Cambridge University Press, 1991. (Cambridge
Texts in Applied Mathematics). ISBN 9780521378970.
HOLMES, M. Introduction to Perturbation Methods. [S.l.]: Springer, 1995. (Texts in
Applied Mathematics). ISBN 9780387942032.
INC., W. M. Maple Soft. 2012. Disponível em: <http://www.maplesoft.com>.
JAGER, E. de; FURU, J. The Theory of Singular Perturbations. [S.l.]: Elsevier
Science, 1996. (North-Holland Series in Applied Mathematics and Mechanics). ISBN
9780444821706.
LIMA, E. Análise real: Funções de uma variável. [S.l.]: Instituto Nacional de Matemática
Pura e Aplicada, 2007. (Coleção Matemática Universitária). ISBN 9788524400483.
LIMA, J. D. de. Aulas de Matemática no Maple. Disponível em:
<http://www.ebah.com.br/content/ABAAABpzwAL/apostila-maple>.
LYNCH, S. Dynamical Systems With Applications Using Maple. [S.l.]: Birkhauser, 2001.
(Progress in Mathematics Series). ISBN 9780817641504.
88

NAYFEH, A. Perturbation Methods. [S.l.]: John Wiley & Sons, 2008. (Physics textbook).
ISBN 9783527617616.
NAYFEH, A. Introduction to Perturbation Techniques. [S.l.]: John Wiley & Sons, 2011.
ISBN 9783527618453.
NAYFEH, A.; CHEN, C.-Y. Perturbation Methods with Mathematica. 1999.
NAYFEH, A.; MOOK, D. Nonlinear Oscillations. [S.l.]: John Wiley & Sons, 2008.
(Physics textbook). ISBN 9783527617593.
POINCARé, H. Sur les intégrales irrégulières des équations linéaires. [S.l.]: Acta Math.,
1986.
SIMMONDS, J.; JR., J. E. M. A First Look at Perturbation Theory. [S.l.]: Dover, 1998.
(Dover Books on Physics Series). ISBN 9780486675510.
SOFT, M. Online Help. 2012. Acessado em: Agosto a Novembro de 2012. Disponível em:
<http://www.maplesoft.com/support/help/>.
STIELTJES, T. Ann. de l'Ecole Norm. 1886.
VERHULST, F. Methods and Applications of Singular Perturbations: Boundary Layers
and Multiple Timescale Dynamics. [S.l.]: Springer, 2005. (Texts in Applied Mathematics).
ISBN 9780387229669.
ZILL, M. D. G.; CULLEN, M. Di�erential Equations with Boundary-Value Problems.
[S.l.]: Brooks/Cole, 2008. ISBN 9780495108368.
89

APÊNDICES
APÊNDICE A - O software Maple 13
Sobre o Maple
Os métodos a serem abordados, serão desenvolvidos com auxílio do software Maple
13, o qual é a marca registrada do software produzido por Walterloo University, Canadá
(LIMA, ). Porém, as resoluções aqui apresentadas não limitam-se somente a este software
e poderão ser abordadas com auxílio de outros softwares, conforme apresenta Nayfeh e
Chen em (NAYFEH; CHEN, 1999), utilizando o software Mathematica.
O Maple é uma linguagem para cálculo matemático simbólico que permite uma grande
variedade de aplicações. A utilização do software no campo aplicacional da matemática,
nos permite uma rápida comparação entre métodos de aproximação e métodos numéricos,
e permite também uma exibição grá�ca dos resultados de modo a obter uma melhor
compreensão do problema em questão.
Para auxiliar no desenvolvimento dos métodos, o Maple disponibiliza worksheets que
consistem em áreas de trabalho, as quais permitem a inserção de textos, linhas de co-
mando e plotagem de grá�cos, de modo que o usuário possa fazer anotações entre o
desenvolvimento de um método, por exemplo.
As worksheets que auxiliaram no desenvolvimento deste trabalho estão disponíveis em
prof.sardo.com.br, e para compreensão do leitor, sempre que for transpor a execução do
Maple 16 para este trabalho, o resultado será apresentado da seguinte forma:
> series(sin(x),x=0,7);
x− 1
6x3 +
1
120x5 +O(x7)
As versões mais recentes do Maple possuem uma interface desenvolvida em Java, a
qual permite uma maior interatividade nos códigos inseridos no software (INC., 2012).
Isto é, ao inserir o comando de divisão (a/b) por exemplo, o Maple automaticamente
reajusta o código inserido, de modo a exibir ao usuário a fração ab.
Principais comandos utilizados
Operações Básicas
90

As principais operações utilizadas, representadas pelo seu respectivo símbolo utilizado
no Maple, são
•Adição: (+)
•Subtração: (-)
•Multiplicação: (*)
•Divisão: (/)
•Potenciação (∧)
•Fatorial: (!)
Vale lembrar que ao inserir o comando este será reajustado, de modo que nem sem-
pre exibirá os comandos acima. Isto é, se tomarmos a multiplicação por exemplo, ao
digitarmos a*b, o maple exibirá em sua linha de comando a · b.
Por exemplo,
> 2 + 3; 3− 2; 3 · 2; 32; 32; 3!;
5
1
6
3
2
9
6
Conforme visualizado no exemplo acima, o Maple permite que seja inserido mais de
um comando por linha, desde que estes estejam separados por ;.
Para atribuir um valor, função, equação, característica ou nome a uma variável, uti-
lizamos o comando :=, assim o comando x:=y pode ser lido como "variável x, recebe
y".
Comandos aplicados no Maple
> a := 2; b := 3; c := ab; a := c; a; eq := x2 + 2x = 1;
a := 2
b := 3
91

c := 8
a := 8
8
eq := x2 + 2x = 1
Além disto, temos algumas sintaxes utilizadas para de�nição como
•Somatório -∑n
i=0 fi:
> sum(fi, i = 0..n)
•Limites - `imx→0f(x):
> limit(f(x), x = 0)
•Diferenciação 1aOrdem - ddxf(x):
> diff(f(x), x)
> D(f)(x)
•Diferenciação 2aOrdem - ddxf(x):
> diff(f(x), x$2)
•Diferenciação parcial 2aOrdem - ∂∂x∂y
f(x, y):
> diff(f(x), x, y)
•Integração -∫∞0f(x)dx:
> int(f(x), x = 0..infinity)
Manipulações algébricas
Uma vez de�nidas as atribuições, podemos de�nir as manipulações mais utilizadas
neste trabalho, através dos seguintes comandos
•Substituição em expressão/equação (eq):
> subs(valor1, valor2, eq)
•Lado direito e esquerdo de uma equação (eq):
> lhs(eq); rhs(eq)
•Expandir expressão/equação (eq):
> expand(eq)
•Combinar termos da expressão/equação (eq):
> combine(eq)
92
•Simpli�car expressão/equação (eq):
> expand(eq)
•Evidenciar um termo especí�co de uma expressão/equação (eq):
> collect(eq, termo)
•Coe�ciente de termon de um polinômio (pl):
> coeff(pl, termo, n)
•Série de potências de uma função (f(t)) até ordem n: > series(f, t, n)
O Maple permite ao usuário que faça uma composição de comandos, isto é, partindo
de 'dentro' para 'fora' na sequência de comandos. Por exemplo, se dada uma equação
eq := (a + b)2 = b − c, podemos retirar o lado esquerdo da equação e expandi-lo através
do seguinte comando: > expand(lhs(eq)). Deste modo, muitos comandos trabalhados no
desenvolvimento deste trabalho, se apresentaram desta forma, a�m de compactar proces-
sos.
Maiores informações sobre as sintaxes das manipulações e os parâmetros que nelas po-
dem ser inseridos, poderão ser veri�cadas detalhademente no Maple Online Help (SOFT,
2012) ou na Central de Ajuda do próprio software.
Solução de Equações e Grá�cos
O Maple nos permite uma rápida obtenção de soluções de equações algébricas e di-
ferenciais com condição de contorno. Assim, temos que os comandos necessários para
obtenção são,
•Um valor x de equação algébrica (eq): > solve(eq, x)
•Valores (x e y) de um sistema de equações (sis): > solve(sis, x, y)
•Função (f(t)) de uma equação diferencial (deq): > dsolve(deq, f(t))
•Função (f(t)) de uma equação diferencial (deq) com condição inicial (ic):
> dsolve({deq, ic}, f(t))
Os grá�cos de funções são explorados no Maple da seguinte forma,
•Função (f(x)) no intervalo x1 a x2 : > plot(f(x), x = x0..x1, color = cor)
93

Utilizaremos também, o recurso que possibilita obtermos a solução de uma equação
diferencial através do método numérico, exibindo-a em forma de grá�co. Isto é, seja
uma equação diferencial (eqd), referente a uma função f(x), com condições inicias (ic).
Podemos resolve-la numericamente e em seguida plotar o resultado entre x0 e x1, da
seguinte forma:
•Resolve a ED: > sn := dsolve({eqn, ic}, f(x), numeric)
•Grá�co da ED: > cn := display(odeplot(sn, [x, f(x)], x0..x1, color = cor))
O comando > display(. . .) poderá ser utilizado de modo a exibir mais de uma curva,
por exemplo, se quisermos comparar uma solução aproximadamente (ca) com a solução
numérica (cn), exibindo-as no mesmo grá�co, podemos simplesmente utilizar o comando:
> display([cn, ca]).
94