universidad nacional de la plata { facultad de …pmarchiano/al-2015/alglineal-clases_1-9.pdf · a...
TRANSCRIPT
1
Universidad Nacional de La Plata – Facultad de Ciencias Astronomicas yGeofısicas
ALGEBRA LINEAL
2015 – Segundo Semestre
VICTORIA VAMPA
2
1. Espacios Vectoriales
1.1. Definicion de espacio vectorial. Ejemplos
El conjunto de los numeros reales y el conjunto de los numeros complejos,con los cuales ya se trabajo, tienen propiedades similares. En ambos puedendefinirse dos operaciones + y . que satisfacen ciertas propiedades y recibenel nombre de cuerpo. Trabajaremos tanto con el cuerpo de los reales, Rcomo con el cuerpo de los complejos C, denotandolos por K. Al estudiarvectores en el plano y en el espacio, hemos definido la suma de vectoresy la multiplicacion por un numero real, y se vieron las propiedades quesatisfacıan. Tambien para el conjunto de polinomios. Cuando en varios con-juntos distintos aparecen estructuras similares es conveniente axiomatizarestas y darles un nombre al ente resultante, con la ventaja que estudiandoesta estructura, quedan estudiadas todas las estructuras que en ella se en-cuadran. Cuando en un conjunto se da una estructura similar a la de losejemplos anteriores, se dice que se tiene un espacio vectorial .

3
DEFINICION: Un conjunto V , cuyos elementos se denotan mediante~u, ~v, ~w, se dice que es un espacio vectorial sobre el cuerpo K, si en el se handefinido dos operaciones: la suma, de manera que a cada par de elementos ~uy v de V se le hace corresponder el elemento ~u+~v de V , denominado sumade ~u y ~v, y la multiplicacion por escalares, de manera que a todo elemento~u de V y a todo elemento a de K se le hace corresponder el elemento a~ude V , que satisfacen las siguientes propiedades:
1. Conmutativa ~u + ~v = ~v + ~u para todo ~u y ~v de V
2. Asociativa ~u + ( ~v + ~w ) = ( ~u + ~v ) + ~w
3. Existe un elemento de V , designado por 0 y denominado neutro, tal que~u + 0 = ~u para todo ~u de V .
4. Para todo elemento u de V , existe un elemento designado por −~u ydenominado opuesto de ~u, tal que ~u + (−u) = 0
5. 1 ~u = ~u para todo ~u de V , donde 1 denota el elemento unidad de K
6. a(b ~u ) = (ab) ~u para todo ~u de V , y todo a y b de K
7. (a + b) ~u = a ~u + b ~u para todo ~u de V , y todo a y b de K
8. a( ~u + ~v ) = a ~u + a ~v para todo ~u, ~v de V , y todo a de K

4
NOTAS:
Los elementos del espacio vectorial reciben el nombre generico de vectores
Las primeras cuatro propiedades se refieren a la suma, las dos que siguena la multiplicacion por escalares y las dos ultimas son las distributivasde una operacion con respecto a la otra.
Si K es R se dice que V es un espacio vectorial real, y si K es C se diceque es un espacio vectorial complejo.
EJEMPLO 1:
R es un espacio vectorial sobre Q, C es un espacio vectorial sobre R ysobre QVectores en el plano, o vectores en el espacio, R2 o R3 con las operacionesusuales son espacios vectoriales sobre REJEMPLO 2:
Kn = {(x1, x2, · · · , xn), xj ∈ K, j = 1, 2, · · · , n}con las operaciones usuales es un espacio vectorial sobre K. En particular,Rn es un espacio vectorial real y Cn es un espacio vectorial complejo.
5
EJEMPLO 3: Sea PK [x] el conjunto de todos los polinomios en lavariable x sobre el cuerpo K, es decir, todos los elementos de la forma
p(x) = a0 + a1x + a2x2 + · · · + anx
n
aj ∈ K Con las operaciones suma de polinomios y multiplicacion porescalares, PK [x] es un espacio vectorial sobre K.
EJEMPLO 4: SeaC([a, b]) el conjunto de todas las funciones continuasdefinidas en el intervalo real [a, b], con valores en R, con las operaciones
(f + g)(x) = f (x) + g(x)
, y(af )(x) = a(f (x))
puede comprobarse que C([a, b]) es un espacio vectorial. El elementoneutro es la aplicacion nula.
EJEMPLO 5: Un ejemplo importante es el conjunto S(A) de solu-ciones del sistema homogeneo AX = ~0, donde x = (x1, x2, · · · , xn)∈ Rn.
6
Los siguientes son algunos resultados que se deducen de las propiedadesque definen un espacio vectorial.
• El elemento neutro de un espacio vectorial es unico
• El opuesto de cada elemento en un espacio vectorial es unico
• Para todo ~u de un espacio vectorial V , 0.~u = ~0
• Para todo elemento ~u de un espacio vectorial V , (−1)~u es su opuesto.
• En todo espacio vectorial V , a ~0 = ~0, donde a ∈K y ~0 es el elementoneutro de V .
1.2. Subespacio vectorial
Algunos subconjuntos de un espacio vectorial V son a su vez espaciosvectoriales con las operaciones definidas en V ; estos subconjuntos especialesreciben el nombre de subespacios vectoriales de V .
DEFINICION: Un subespacio vectorial de un espacio vectorial Ves un subconjunto V1 de V , que a su vez es un espacio vectorial con lasoperaciones definidas en V .

7
Para demostrar que un subconjunto es un subespacio vectorial no es ne-cesario comprobar de nuevo que satisface todas las propiedades del espaciovectorial. En realidad, es suficiente demostrar que la suma de dos elementosde V1 es otro elemento de V1, y que la multiplicacion de un elemento de V1por un elemento del cuerpo K, es otro elemento de V1; es decir
1. Si ~u y ~v ∈ V1, ~u + ~v ∈ V1
2. Si a ∈ K y ~u ∈ V1, a ~u ∈ V1
EJEMPLO 1:
Caracterizar subespacios de R2
a) S = {(0, 0)} es un subespacio
b) Supongamos S un subespacio que contiene algun elemento ~u no nulo.Entonces para todo a ∈ R a~u ∈ S. Si esos son todos los elementos deS, S es un subespacio y graficamente es una recta por el origen.
c) Si S contiene a un ~v que no es a~v, contiene a sus multiplos a~v. Luegocontiene a dos rectas L~u y L~v por el origen. Por la regla del paralelo-gramo cualquier ~w ∈ R2 es suma de un elemento de L~u y uno de L~v.En consecuencia S = R2
8
EJEMPLO 2: Sea V un espacio vectorial sobre K
a) S = {~0} es un subespacio de V
b) V es un subespacio de V
c) Si ~v ∈ V , S = {a~v, a ∈ K} es un subespacio de V (dem) Estesubespacio se denomina el subespacio generado por ~v, y se nota S =〈v〉
d) Sean v1, v2, · · · , vn ∈ V . Entonces S = {a1.v1+a2.v2+· · ·+an.vn, ai ∈K 1 ≤ i ≤ n} es un subespacio de V (dem)
EJEMPLO 3: P(n)R [x] es un subespacio vectorial de PR [x]; a su vez,
PR [x] es un subespacio vectorial de C(R).
9
EJEMPLO 4: Sea S = {~u1, ~u2, · · · , ~un} un conjunto de vectores deun espacio vectorial V . Definimos
L(S) = L(~u1, ~u2, · · · , ~un) =
n∑j=1
aj~uj aj ∈ K, j = 1, 2, · · · , n
El conjunto L(S) es un subespacio vectorial de V (falta dem.), que recibeel nombre de subespacio vectorial generado por S
Como ejemplo ver que L(~u1, ~u2, ~u3), donde ~u1 = (1, 0, 1), ~u2 = (−1, 1, 0)y ~u3 = (1, 1, 2), es un subespacio vectorial de R3.
EJEMPLO 5: Sean a1, a2, · · · , an ∈ K fijos. S = {(x1, x2, · · · , xn) ∈Kn, a1x1 + a2x2 + · · · + anxn = 0, } es un subespacio de Kn (dem)

10
EJEMPLO 6: Dada una matriz A de m filas y n columnas, y de rangor, todas las soluciones del sistema de ecuaciones homogeneo
A ~X = ~0, ~X ∈ Rn
constituyen un subespacio vectorial de Rn.
Ver cual es el subespacio vectorial en el sistema homogeneo siguiente: 2y − z + w = 03x + y + 10z + 5w = 0
x + 3z + w = 0

11
1.3. Base y dimension de un espacio vectorial
Sea V un espacio vectorial sobre un cuerpo K; un numero finito de vecto-res ~v1, ~v2, , · · · , ~vn se dice que son linealmente dependientes si existen nelementos de K, a1, a2, , · · · , an no todos nulos, tal que
a1~v1 + a2~v2 + · · · + an~vn = ~0
Si los vectores v1, v2, , · · · , vn no son linealmente dependientes, se dice queson linealmente independientes ; por lo tanto los vectores v1, v2, , · · · , vnson linealmente independientes si cualquier igualdad como la anterior im-plica que todos los elementos de K, a1, a2, , · · · , an son nulos.
Si en la igualdad anterior an es no nulo, podemos escribir
~vn = −a1
an~v1 −
a1
an~v2 + · · · − an−1
an~vn−1
decimos entonces que ~vn es una combinacion lineal de los vectores ~v1, ~v2, , · · · ,~vn−1. En general, diremos que ~v es combinacion lineal de los vectores~v1, ~v2, · · · , ~vk, si existen k numeros a1, a2, , · · · , ak de K tal que
~v = a1~v1 + a2~v2 + · · · + ak~vk

12
Un conjunto finito de vectores {~v1, ~v2, · · · , ~vk} de un espacio vectorial Vse dice que es un sistema de generadores de V si todo elemento de Vpuede escribirse como una combinacion lineal de los vectores ~v1, ~v2, · · · , ~vk.
Antes de exponer algunos ejemplos es conveniente realizar algunas obser-vaciones.
En primer lugar, observamos que todo conjunto finito de vectores quecontiene al elemento neutro es linealmente dependiente; basta observarque
a~0 + 0. ~v2 + · · · + 0. ~vn = ~0
para cualquier a ∈ K.
En segundo lugar observaremos que todo conjunto finito de vectoreslinealmente independientes no puede contener un subconjunto de vec-tores que sean linealmente dependientes.
13
En efecto, si {~v1, ~v2, · · · , ~vn} son linealmente independientes y suponemosque {~v1, ~v2, · · · , ~vk}, k ≤ n son linealmente dependientes tendrıamos
~v = a1~v1 + a2~v2 + · · · + ak~vk = ~0
con no todos los aj igual a cero; basta observar que, entonces
a1~v1 + a2~v2 + · · · + ak~vk + 0~vk+1 + · · · + 0~vn = ~0
con lo cual los originales serıan linealmente dependientes.
EJEMPLO 1: Tres vectores no nulos de R2 son siempre linealmentedependientes
EJEMPLO 2: En general, n + 1 vectores de Kn son siempre lineal-mente dependientes.
14
EJEMPLO 3: Las funciones p0(x) = 1, p1(x) = x, p2(x) = x2,· · · , pn(x) = xn, son linealmente independientes, ya que si tenemos laigualdad
a01 + a1x + a2x2 + · · · , anxn = 0
para todo x ∈ R, resultan a0 = a1 = a2 = · · · an = 0.
EJEMPLO 4:
Las funciones f (x) = cos2(x), g(x) = sen2(x) y h(x) = 1 son lineal-mente dependientes en C([0, 2π]) ya que cos2(x) + sen2(x) = 1
DEFINICION: Un conjunto finito de vectores {~e1, ~e2, · · · , ~en} se diceque es una base de un espacio vectorial V si se cumplen las dos condicionessiguientes:
1. Los vectores ~e1, ~e2, · · · , ~en son linealmente independientes, y
2. Todo elemento de V es una combinacion lineal de los vectores ~e1, ~e2, · · · , ~en

15
Observar que la segunda condicion de esta definicion es equivalente alhecho de que el conjunto de vectores ~e1, ~e2, · · · , ~en sea un sistema de gene-radores de V . Sin embargo, no todo sistema de generadores de un espaciovectorial V es una base.
EJEMPLO 5: Si ~ej = (0, 0, · · · , 1, · · · , 0) ∈ Kn, donde 1 ocupael lugar j, se tiene que ~e1, ~e2, · · · , ~en son linealmente independientes yademas si ~x = (x1, x2, · · · , xn) ∈ Kn, se tiene que
~x =
n∑j=1
xj~ej
Por lo tanto {~e1, ~e2, · · · , ~en} es una base de Kn, que recibe el nombrede base canonica, E, de este espacio.
EJEMPLO 6: Dada una matriz A de m filas y n columnas, y de rangor, todas las soluciones del sistema de ecuaciones homogeneo
A ~X = ~0, ~X ∈ Rn
constituyen un subespacio vectorial de Rn generado por n − r vectores(ver EJEMPLO 6 pag.10)

16
EJEMPLO 7:
El conjunto {1, x, · · · , xn} es una base de P(n)K [x], ya que son lineal-
mente independientes de acuerdo con el resultado del Ejemplo 3, y todopolinomio p de grado inferior o igual a n puede escribirse de la forma
p(x) = a01 + a1x + a2x2 + · · · + anx
n
EJEMPLO 8:
El conjunto {1, x, · · · , xn} no es una base de PK [x], ya que el polinomiop(x) = xn+1 no es combinacion lineal de estos.
Si {~e1, ~e2, · · · , ~en} es una base de un espacio vectorial V y ~v es cual-quier elemento de V podemos escribir a ~v como combinacion lineal de~e1, ~e2, · · · , ~en, de la forma
~v = v1~e1 + v2~e2 + · · · + vn~en
con vj ∈ K. Los numeros v1, v2, · · · , vn se denominan componentes de~v con respecto a la base ~e1, ~e2, · · · , ~en.
17
Las componentes de un vector ~v con respecto a una base son unicas, yaque si tenemos
~v = v1~e1 + v2~e2 + · · · + vn~en
y~v = v1~e1 + v2~e2 + · · · + vn~en
se tiene tambien que
~0 = (v1 − v1)~e1 + (v2 − v2)~e2 + · · · + (vn − vn)~en
Puesto que ~e1, ~e2, · · · , ~en son linealmente independientes debe ser v1 =v1, v2 = v2, · · · , vn = vn, que era lo que querıamos demostrar.
EJEMPLO 9:
Sea V = R3 y sea E la base canonica, entonces (x, y, z)E = (x, y, z).
Si la base es B = {(1, 1, 1), (1, 1, 0), (1, 0, 0)} entonces (x, y, z)B =(z, y − z, x− y).
18
Un mismo espacio vectorial puede poseer varias bases; nuestro proximoobjetivo es demostrar que todas ellas han de poseer el mismo numero deelementos.
PROPOSICION:Si V es un espacio vectorial que posee una base con n elementos, cuales-
quiera n + 1 vectores de V son linealmente dependientes.Demostracion
De esta proposicion se deduce un resultado un poco mas general: en unespacio vectorial V que posee una base con n elementos, cualesquiera mvectores de V , con m > n son linealmente dependientes. Basta observarque n + 1 de los m vectores dados han de ser linealmente dependientes,debido a la proposicion anterior, y por lo tanto, todos ellos han de formarun conjunto de vectores linealmente dependiente. Este resultado se aplicaen la demostracion del siguiente teorema:
19
PROPOSICION:Todas las bases de un mismo espacio vectorial V poseen el mismo numero
de elementos.DemostracionSean {~e1, ~e2, · · · , ~en} y
{~e′1, ~e′2, · · · , ~e′m
}dos bases de un espacio vec-
torial V ; por el razonamiento anterior m ≤ n, ya que en caso contrario losvectores de la segunda base serıan linealmente dependientes. Similarmenten ≤ m ya que en caso contrario los vectores de la primera base serıanlinealmente independientes. Se tiene, por lo tanto, que n = m.
El numero de elementos que posee una base cualquiera de un espacio vec-torial V recibe el nombre de dimension de V ; este numero sera designadomediante dim(V ). Si el espacio vectorial solo contiene un elemento, es decir
V ={~0}
tiene dimension cero.

20
De los ejemplos anteriores podemos deducir los siguientes resultados:
1. La dimension de Kn es n
2. La dimension de P(n)K [x] es n + 1
3. En el ejemplo 4 ver queL(~u1, ~u2, ~u3), donde ~u1 = (1, 0, 1), ~u2 = (−1, 1, 0)y ~u3 = (1, 1, 2), es un subespacio vectorial de R3 de dimension 2.
PROPOSICION:Sea V un espacio vectorial de dimension n. Todo conjunto de n vectores
de V que sean linealmente independientes son una base de V .Demostracion
Una forma de encontrar una base de un espacio vectorial V es agregarvectores a un conjunto de vectores linealmente independientes de V . En lademostracion de la proposicion que sigue se explica la forma de agregarlos.

21
PROPOSICION:Sea V un espacio de dimension finita n; todo conjunto de vectores lineal-
mente independientes de V puede completarse para obtener una base, esdecir, dados k vectores ~e1, ~e2, · · · , ~ek , k < n, de V , linealmente indepen-dientes, existen n−k vectores ~ek+1, ~ek+2, · · · , ~en de V tal que el conjunto{~e1, ~e2, · · · , ~ek, ~ek+1, ~ek+2, · · · , ~en} es una base de V .
Demostracion
Supongamos que V es un espacio vectorial de dimension finita n; aca-bamos de probar que k vectores linealmente independientesde V puedencompletarse para obtener una base. Puede demostrarse que si S es un sis-tema de generadores de V , de el puede extraerse un subconjunto S1 quesea una base de V .
Ahora unos comentarios acerca de la dependencia o independencia linealde subconjuntos infinitos de un espacio vectorial.
22
Un conjunto infinito S de elementos de un espacio vectorial V se dice li-nealmente independiente si cualquier subconjunto finito de S es linealmenteindependiente. En caso contrario, S se dice linealmente dependiente; esdecir S es linealmente dependiente si existe un subconjunto finito de el quees linealmente dependiente.
Un espacio vectorial V en el que se puede encontrar un subconjunto Slinealmente independiente y con infinitos elementos, se dice que tiene di-mension infinita .
Los espacios vectoriales PK [x], y C([0, 2π]), introducidos en la seccionanterior, son espacios vectoriales de dimension infinita. Puede demostrarseque el conjunto S = {xn, n ∈ N} es un conjunto linealmente independientede PK [x] mientras que el conjunto S = {cos(nx), sen(mx)}n,m∈N es unconjunto linealmente independiente de C([0, 2π]).
23
1.4. Interseccion y suma de subespacios vectoriales
Una pregunta que surge es si al considerar las operaciones de union e inter-seccion entre subespacios de un espacio vectorial V (que son subconjuntosde V ) se preserva la estructura de subespacio. Veremos que se preserva enla interseccion pero no en la union.
Dados dos subespacios V1 y V2 de un espacio vectorial V podemos definirsu interseccion
V1 ∩ V2 = {~u, ~u ∈ V1 ∧ ~u ∈ V2}y su suma
V1 + V2 = { ~u1 + ~u2, ~u1 ∈ V1 ∧ ~u2 ∈ V2}Como puede demostrarse facilmente (ver en la practica) estos dos nuevos
subconjuntos son tambien subespacios vectoriales de V .La relacion que existe entre las dimensiones de estos subespacios vecto-
riales y las dimensiones de los subespacios V1 y V2 queda plasmada en elsiguiente resultado:

24
PROPOSICION:
dim(V1) + dim(V2) = dim(V1 + V2) + dim(V1 ∩ V2)
para cualesquiera subespacios vectoriales V1 y V2 de un espacio vectorialV de dimension finita.
Demostracion
NOTA:
Puede demostrarse que S + T es el menor subespacio (con respecto a lainclusion) que contiene a S ∪ T
EJEMPLO 1:
S = {(x1, x2, · · · , xn) ∈ Kn{
a11x1 + a12x2 + · · · + a1nxn = 0am1x1 + am2x2 + · · · + amnxn = 0
} es un subespacio de Kn, pues S =⋂mi=1 Si, donde
Si = {(x1, x2, · · · , xn) ∈ Kn, ai1x1 + ai2x2 + · · · + ainxn = 0, }, 1 ≤i ≤ n y cada Si es un subespacio de Kn (ver EJEMPLO 5, pag. 9)
25
EJEMPLO 2:
Dos subespacios vectoriales V1 y V2 en R2 ambos de dimension 1, tienenuna suma que coincide con todo R2, ya que
dim(V1 + V2) = dim(V1) + dim(V2)− dim(V1 ∩ V2) = 1 + 1− 0 = 2
En este ejemplo podemos volver sobre el comentario realizado al comen-zar la seccion. Si V1 y V2 son los subespacios generados por los vectores(1, 0) y (0, 1) respectivamente, la union de V1 y V2 no es un subespacio,ya que (1, 1) = (1, 0) + (0, 1) /∈ S ∪ T pues (1, 1) /∈ S y (1, 1) /∈ T .
DEFINICION:Un espacio vectorial V es suma directa de dos subespacios V1 y V2 si
1. V1 + V2 = V
2. V1 ∩ V2 = ~0
Utilizaremos la notacion V = V1⊕V2 para indicar que V es suma directade los subespacios V1 y V2.
26
Observaciones
1. El plano R2 puede escribirse como suma directa de dos rectas no coinci-dentes que pasan por el origen
2. El espacio R3 puede escribirse como suma directa de un plano que pasapor el origen y una recta que le corta en ese punto
3. De la proposicion anterior deducimos que si V = V1 + V2, se tiene que
dim(V ) = dim(V1 ⊕ V2) = dim(V1) + dim(V2)
ya que el subespacio ~0 tiene dimension 0. Ademas, si B1 es base de V1 yB2 es base de V2, B = B1 ∪B2 es una base de V .
EJEMPLO 1:
S = {~x ∈ R3, x1 + x2 + x3 = 0, } y T = 〈(1, 1, 1)〉. Se tiene quedim(S) = 2, dim(T ) = 1 y S ∩ T = ~0. Entonces, dim(S + T ) = 3, yS + T = R3.
27
Si V = V1 + V2 todo elemento ~v ∈ V puede escribirse de la forma~v = ~v1+~v2 con ~v1 ∈ V1 y ~v2 ∈ V2. Si la suma es directa, esta descomposiciones unica.
PROPOSICION:Sean V1 y V2 subespacios vectoriales de un espacio vectorial V . Las si-
guientes afirmaciones son equivalentes:
1. V = V1 ⊕ V2
2. Para todo ~v ∈ V existe una descomposicion unica de la forma
~v = ~v1 + ~v2 con ~v1 ∈ V1 y ~v2 ∈ V2.
Demostracion
Tambien podemos definir la interseccion, la suma y la suma directa demas de dos subespacios vectoriales.
28
En general, dados n subespacios vectoriales V1, V2, · · · , Vn de un espaciovectorial V , definimos
n⋂j=1
Vj ={~u ∈ V, ~u ∈ Vj, j = 1, · · · , n
}y
n∑j=1
Vj =
n∑j=1
~uj, ~uj ∈ Vj, j = 1, · · · , n
que reciben el nombre de interseccion y suma, respectivamente, de los
subespacios vectoriales dados. Estos dos nuevos subespacios son tambiensubespacios vectoriales de V .

29
La definicion de suma directa de varios subespacios vectoriales es un pocomas complicada en general, que si solamente hay dos. Diremos que V essuma directa de los subespacios vectoriales V1, V2, · · · , Vn y escribiremos
V = V1 ⊕ V2 ⊕ V3 ⊕ · · · ⊕ Vnsi todo vector ~v ∈ V tiene una descomposicion unica de la forma ~v =∑ni=1 ~vi con ~vi ∈ Vi, i = 1, · · · , n.
NOTAS:
Si n = 2, la proposicion anterior muestra que esta definicion y la dadaanteriormente son equivalentes.
Para n ≥ 3 se puede demostrar que las siguientes afirmaciones son equi-valentes:
• V = V1 ⊕ V2 ⊕ V3 ⊕ · · · ⊕ Vn• V =
∑ni=1 Vi y Vi ∩ (
∑nk 6=i Vk) =
{~0}
30
1.5. Cambio de base
Supongamos que un espacio vectorial V de dimension finita posee dosbases. Veremos que con la ayuda de una matriz se pueden obtener lascoordenadas de un vector con respecto a una base de V a partir de lascoordenadas del vector en otra base.
Supongamos que B = {~e1, ~e2, · · · , ~en} y B′ ={~e′1, ~e′2, · · · , ~e′m
}son
dos bases de un espacio vectorial V de dimension n.Todo elemento de la base B se escribe como combinacion lineal de los
elementos de la base B′:~e1 = a11.
~e′1 + a21.~e′2 + · · · + an1.
~e′n~e2 = a12.
~e′1 + a22.~e′2 + · · · + an2.
~e′n· · ·~en = a1n.
~e′1 + a2n.~e′2 + · · · + ann.~e′n
(1)
que en forma abreviada puede escribirse
~ej =
n∑i=1
aij.~e′i, j = 1, · · ·n
31
Diremos entonces que la base B se obtiene de la base B′ mediante lasiguiente matriz
A =
a11 a12 · · · a1na21 a22 · · · a2n· · · · · · · · · · · ·an1 an2 · · · ann
donde la j-esima columna de A son las componentes del vector ~ej con
respecto a la base ~e′j , j = 1, 2, · · · , n.
La matriz A se denomina matriz del cambio de base de B a B′.Cuando, por necesidades de notacion sea necesario hacer constar las basesB y B′ escribiremos PB′,B.
Si B y B′ coinciden se tiene que PB′,B = In×n, esto sucede para cualquiermatriz de un cambio de base, como se demuestra en la siguiente proposicion:
32
PROPOSICION:La matriz A del cambio de base de B a B′ es invertible y su inversa es la
matriz del cambio de base de B′ a B. Podemos, por lo tanto, escribir
P−1B′,B = PB,B′ = A−1
Demostracion
EJEMPLO 1:
Dadas las bases
B = {(1, 1, 1), (1, 1, 0), (1, 0, 0)} B′ = {~e1, ~e2, ~e3} (base canonica deR3), la matriz de cambio de base de B a B′ es,
PB′,B =
1 1 11 1 01 0 0

33
Tratemos ahora de relacionar entre sı las coordenadas de un mismo vectoren las bases nueva B′ y antigua B. Supongamos que ~x ∈ V ,
~x = x1.~e1 + x2.~e2 + · · · + xn.~en
y ademas
~x = x′1.~e′1 + x′2.~e
′2 + · · · + x′n.~e
′n
Sustituyendo Ec.(1) en la primera expresion obtenemos
~x = x1.(∑ni=1 ai1~e
′i) + x2.(
∑ni=1 ai2~e
′i) + · · · + xn.(
∑ni=1 ain~e
′i)
= (a11x1 + a12x2 + · · ·+ a1nxn)~e′1 + (a21x1 + a22x′2 + · · ·+ a2nxn)~e′2 +
· · · + (an1x1 + an2x2 + · · · + annxn)~e′n

34
Comparando esta ultima igualdad con la segunda expresion podemos es-cribir
x′1 = a11.x1 + a12.x2 + · · · + a1n.xnx′2 = a21.x1 + a22.x2 + · · · + a2n.xn· · ·x′n = an1.x1 + an2.x2 + · · · + ann.xn
(2)
Si convenimos en escribir X =
x1x2x3· · ·xn
y X ′ =
x′1x′2x′3· · ·x′n
a las componen-
tes del vector ~x en la antigua y en la nueva base, respectivamente, Ec.2 seescribe brevemente de la forma
X ′ = AX
35
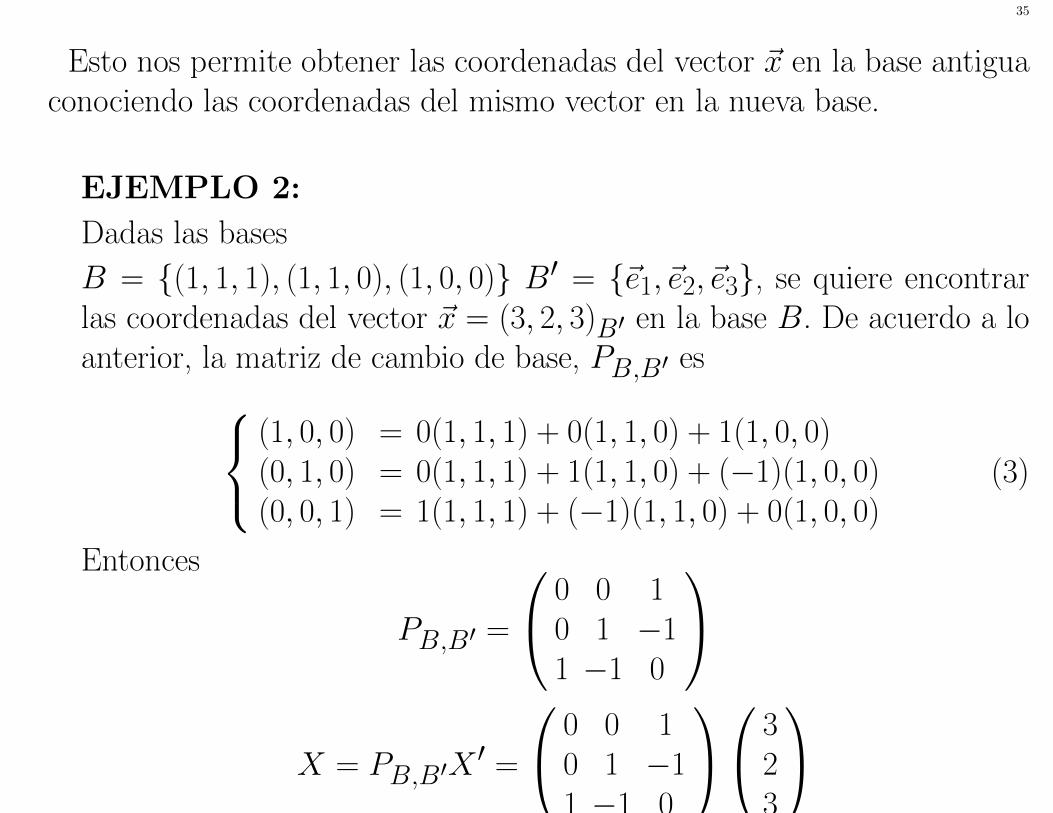
Esto nos permite obtener las coordenadas del vector ~x en la base antiguaconociendo las coordenadas del mismo vector en la nueva base.
EJEMPLO 2:
Dadas las bases
B = {(1, 1, 1), (1, 1, 0), (1, 0, 0)} B′ = {~e1, ~e2, ~e3}, se quiere encontrarlas coordenadas del vector ~x = (3, 2, 3)B′ en la base B. De acuerdo a loanterior, la matriz de cambio de base, PB,B′ es (1, 0, 0) = 0(1, 1, 1) + 0(1, 1, 0) + 1(1, 0, 0)
(0, 1, 0) = 0(1, 1, 1) + 1(1, 1, 0) + (−1)(1, 0, 0)(0, 0, 1) = 1(1, 1, 1) + (−1)(1, 1, 0) + 0(1, 0, 0)
(3)
Entonces
PB,B′ =
0 0 10 1 −11 −1 0
X = PB,B′X
′ =
0 0 10 1 −11 −1 0
323
36
Ası obtuvimos las coordenadas del vector ~x en la base antigua B cono-ciendo las coordenadas del mismo vector en la nueva base B′.
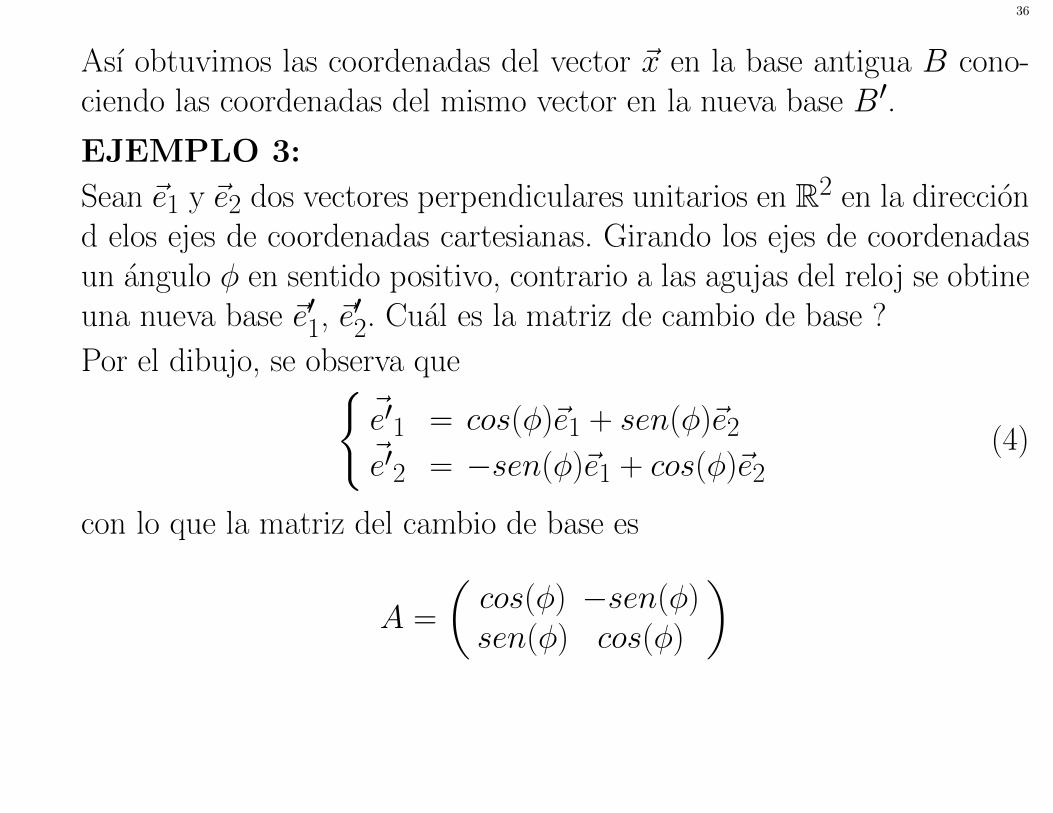
EJEMPLO 3:
Sean ~e1 y ~e2 dos vectores perpendiculares unitarios en R2 en la direcciond elos ejes de coordenadas cartesianas. Girando los ejes de coordenadasun angulo φ en sentido positivo, contrario a las agujas del reloj se obtineuna nueva base ~e′1, ~e′2. Cual es la matriz de cambio de base ?
Por el dibujo, se observa que{~e′1 = cos(φ)~e1 + sen(φ)~e2~e′2 = −sen(φ)~e1 + cos(φ)~e2
(4)
con lo que la matriz del cambio de base es
A =
(cos(φ) −sen(φ)sen(φ) cos(φ)
)
37
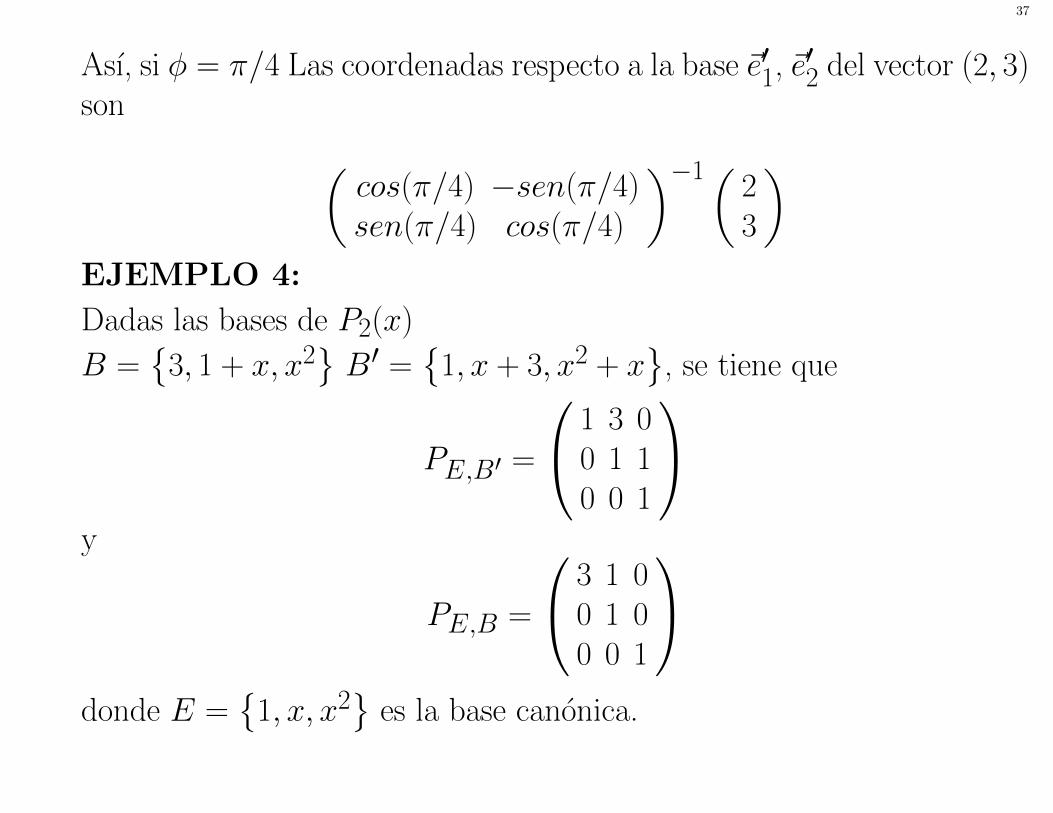
Ası, si φ = π/4 Las coordenadas respecto a la base ~e′1, ~e′2 del vector (2, 3)son (
cos(π/4) −sen(π/4)sen(π/4) cos(π/4)
)−1(23
)EJEMPLO 4:
Dadas las bases de P2(x)
B ={
3, 1 + x, x2}B′ =
{1, x + 3, x2 + x
}, se tiene que
PE,B′ =
1 3 00 1 10 0 1
y
PE,B =
3 1 00 1 00 0 1
donde E =
{1, x, x2
}es la base canonica.
38
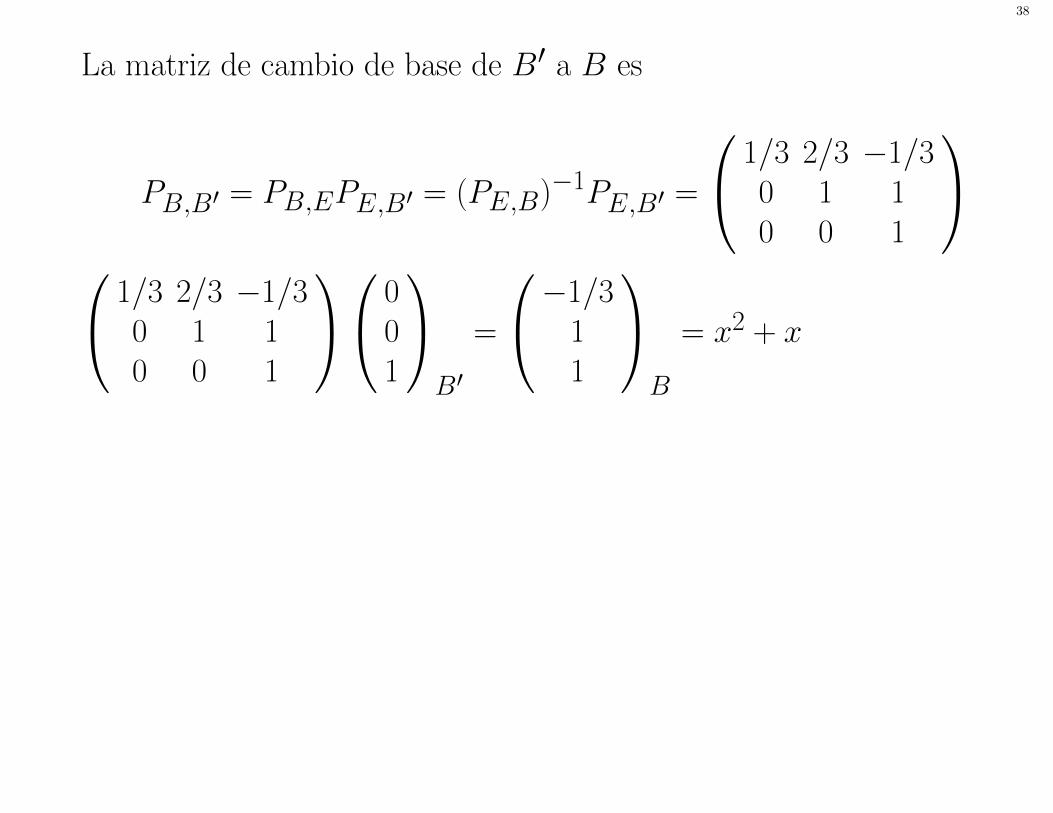
La matriz de cambio de base de B′ a B es
PB,B′ = PB,EPE,B′ = (PE,B)−1PE,B′ =
1/3 2/3 −1/30 1 10 0 1
1/3 2/3 −1/3
0 1 10 0 1
001
B′
=
−1/311
B
= x2 + x
39
2. Aplicaciones Lineales entre Espacios Vectoriales
Las transformaciones lineales son las funciones con las que se trabaja enAlgebra Lineal. Son funciones que van de un espacio vectorial a otro.
2.1. Definicion de aplicacion lineal. Ejemplos
DEFINICION:Sean V y W dos espacios vectoriales, una aplicacion lineal T de V enW es una aplicacion T : V → W tal que:
1. T (~v + ~w) = T (~v) + T (~w) para todo ~v, ~w ∈ V .
2. T (a ~v) = a T (~v) para todo a ∈ K y todo ~v ∈ V .
NOTA:
V y W deben ser espacios vectoriales sobre el mismo cuerpo K.
Las aplicaciones O : V → W , O(~u) = ~0W para todo ~u ∈ V y
Id : V → V , Id(~u) = ~u son transformaciones lineales
40
EJEMPLO 1:
Dado un numero real a, la aplicacion que asocia a cada polinomio delconjunto PR [x] su valor en x = a es una aplicacion lineal. Esta aplicacionqueda definida mediante las siguientes expresiones:
T : PR [x]→ R
T (p(x)) = p(a)
El hecho que T es una aplicacion lineal se deduce de las siguientes igual-dades
T (p(x) + q(x)) = T ((p + q)(x)) = (p + q)(a)
= p(a) + q(a) = T (p(x)) + T (q(x))
yT (cp(x)) = T (cp)(x) = (cp)(a) = c(p(a)) = cT (p(x))
para todo numero real c.

41
Aplicando repetidas veces las propiedades 1 y 2 de la definicion de aplica-cion lineal entre espacios vectoriales se puede ver que la imagen, medianteuna transformacion lineal, de una combinacion lineal de vectores del espaciovectorial inicial es una combinacion lineal de vectores del espacio vectorialfinal, es decir
T (
n∑j=1
cj~vj) =
n∑j=1
cjT (~vj)
donde cj ∈ K y ~vj ∈ V para todo j = 1, 2, · · · , n.
Otras propiedades que se deducen de la definicion de aplicacion lineal seenuncian en las proposiciones siguientes:
42
PROPOSICION 1:Sea T una aplicacion lineal entre dos espacios vectoriales V yW . Se tienen
los siguientes resultados:
1. La imagen del elemento neutro de V mediante T es el neutro de W , esdecir, T (~0V ) = ~0W
2. La imagen mediante T del opuesto de un elemento ~v ∈ V es el opuestode T (~v), es decir, T (−~v) = −T (~v)
Demostracion
PROPOSICION 2:Sea T : V → W una aplicacion lineal entre espacios vectoriales. La imagen
mediante T de cualquier subespacio vectorial V1 de V , W1 = T (V1) es unsubespacio vectorial de W .
Demostracion

43
PROPOSICION 3:Sea T : V → W una aplicacion lineal entre espacios vectoriales. Si U es
un subespacio de W , entonces T−1(U) = {~v, ∈ V, T (~v) ∈ U}Demostracion
Volviendo a la Prop. 2, si el subespacio V1 de V tiene {~v1, ~v2, · · · , ~vk}como base, todo elementow deW1 puede escribirse como combinacion linealde los vectores T (~v1), T (~v2), · · · , T (~vk). Esto es cierto ya que tomando~v ∈ V1 tal que T (~v) = ~w se tiene que
~w = T (~v) = T (
k∑j=1
cj~vj) =
k∑j=1
cjT (~vj)
Por lo tanto, W1 coincide con el subespacio generado por los vectoresT (~v1), T (~v2), · · · , T (~vk), es decir W1 = L(T (~v1), T (~v2), · · · , T (~vk)). Enconsecuencia, la dimension de W1 no puede superar k.
Hemos probado el siguiente resultado:
44
PROPOSICION 4:La imagen mediante una aplicacion lineal de un subespacio vectorial de
dimension k es un subespacio vectorial de dimension no superior a k.
Demostraremos con el teorema que sigue que una aplicacion queda deter-minada cuando se conocen las imagenes de los elmentos de una base delespacio vectorial inicial.
TEOREMA 5Sea B = {~e1, ~e2, · · · , ~en} una base de un espacio vectorial V y sean~w1, ~w2, · · · , ~wn n vectores cualesquiera de otro espacio vectorial W . Enestas condiciones, existe una unica aplicacion lineal T de V en W tal que
T (~ej) = ~wj, j = 1, 2, · · · , nDemostracion
45
2.2. Matriz de una Aplicacion Lineal.
Sean V y W dos espacios vectoriales sobre el mismo cuerpo K. Sea B =
{~e1, ~e2, · · · , ~en} una base de V y B ={~f1, ~f2, · · · , ~fn
}una base de W .
El elemento T (~e1) es un vector de W , y por lo tanto podemos escribir,
T (~e1) = a11~f1 + a21
~f2 + · · · + an1~fn
Analogamente,
T (~e2) = a12~f1 + a22
~f2 + · · · + an2~fn
· · · · · · · · ·T (~en) = a1n
~f1 + a2n~f2 + · · · + ann ~fn
46
Estas igualdades se escriben abreviadamente de la forma
T (~ej) =
n∑i=1
aij ~fi, j = 1, 2 · · · , n
En estas condiciones diremos que
T =
a11 a12 a13 · · · a1na21 a22 a23 · · · a2n· · · · · ·an1 an2 an3 · · · ann
es la matriz de la aplicacion T con respecto a las bases B y B.
Observar que la j-esima columna de la matriz de la aplicacion lineal Tson las componentes de T (~ej) con respecto a la base B de W .
47
Preferimos denominar a la matriz con la misma letra que a la aplicacion(aunque para ser precisos serıa necesario designar a la matriz T con unsımbolo que incluyera las bases B y B).
Dado ~x ∈ V , podemos escribir
~x =
n∑j=1
xj~ej
e
~y = T (~x) =
n∑i=1
yi ~fi
La rel. entre las coordenadas yi y xj viene dada por la matriz T . En efecto,
n∑i=1
yi ~fi = T (~x) = T (
n∑j=1
xj~ej) =
n∑j=1
xjT (~ej) =
n∑j=1
xj(
n∑i=1
aij ~fi) =
n∑i=1
(
n∑j=1
aijxj)~fi
48
de donde,
yi =
n∑j=1
aijxj, i = 1, 2 · · · , n
o sea, la relacion entre las coordenadas yi y xj viene dada por la matrizT .
Vimos que si en los espacios vectoriales V y W , de dimension finita ny m, respectivamente, se fijan bases, existe una correspondencia biunıvocaentre las aplicaciones lineales de V en W y el conjunto de las matricesMm×n(K), de orden m × n sobre el cuerpo K. Puesto que el conjuntoMm×n(K) posee una estructura de espacio vectorial, tambien lo tiene el
conjunto de todas las aplicaciones lineales entre dos espacios vectoriales so-bre el mismo cuerpoK y al que denominamos L(V,W ). Las dos operacionesque le dan estructura de espacio vectorial son:

49
Si T y T ′ son elementos de L(V,W ), definimos la suma mediante
(T + T ′)(~v) = T (~v) + T ′(~v) para todo ~v ∈ VSi T es un elemento de L(V,W ) y c es un elemento de K, se define la
multiplicacion de c por T mediante
(cT )(~v) = c(T (~v)) para todo ~v ∈ VLas operaciones recien definidas tienen ciertas propiedades que coinciden
con las enumeradas para matrices, y se resumen en el teorema a continua-cion:
TEOREMA 1Sean V yW dos espacios vectoriales sobre un mismo cuerpoK; el conjuntoL(V,W ) de las aplicaciones lineales entre V y W , con las operacionesanteriormente definidas, es un espacio vectorial sobre el cuerpo K.
Demostracion
NOTA: Si V y W coinciden escribimos L(V ) en lugar de L(V, V ).
50
Como toda aplicacion lineal puede representarse mediante una matriz yrecıprocamente, se tiene el siguiente resultado:
TEOREMA 2Sean V y W espacios vectoriales de dimensiones n y m, respectivamente,
entonces, el espacio vectorial L(V,W ) tiene dimension m× n.Demostracion
NOTA:La matriz de la aplicacion lineal suma coincide con la suma de las matrices
de cada una de las aplicaciones y la matriz de la aplicacion lineal cT coincidecon el producto de la matriz T por el escalar c.
Si llamamos M(T ) a la matriz de la aplicacion lineal T , esto se escribe
M(T + T ′)) = M(T ) + M(T ′)
y
M(cT )) = cM(T ), c ∈ K
51
La composicion de funciones usual puede realizarse entre dos transforma-ciones lineales y el resultado es otra transformacion lineal.
PROPOSICION 2:Sean V ,W yX espacios vectoriales sobre el cuerpoK. Sean T ∈ L(V,W )
y T ′ ∈ L(W,X). Entonces
T ′oT ∈ L(V,X)
Demostracion
Si los espacios V , W y X tienen dimension finita y si denotamos porM(T ), M(T ′) y M(T ′oT ) las matrices de T , T ′ y T ′oT , respectivamente,con respecto a las bases de antemano fijadas, se tiene el siguiente resultado:
M(T ′oT ) = M(T ′)M(T )

52
2.3. Aplicaciones lineales inyectivas y suryectivas. Nucleo e Ima-gen de una Aplicacion Lineal.
Sean V y W dos espacios vectoriales sobre el mismo cuerpo K y T unaaplicacion lineal de de V en W . Recordamos que T es intectiva si T (~x) =T (~y) implica ~x = ~y y T es suryectiva si para todo ~y ∈ W existe ~x ∈ Vtal que T (~x) = ~y o equivalentemente T (V ) = W , donde T (V ) denota laimagen de V mediante T ; finalmente recordamos que T es biyectiva si esa la vez inyectiva y suryectiva.
En el caso de aplicaciones lineales cada uno de los tipos anteriores reci-be un nombre especial: una aplicacion lineal inyectiva recibe el nombrede monomorfismo; si es suryectiva se le da el nombre de epimorfismo;finalmente si ola aplicacion es biyectiva se dice que es un isomorfismo.
Encontraremos ahora condiciones sencillas que sirvan para determinar siuna aplicacion lineal es de cualquiera de los tipos anteriores. Comenzaremoscon las aplicaciones inyectivas, y para ello necesitamos definir el conceptode nucleo de una aplicacion lineal:

53
Dada una aplicacion lineal
T : V → W
definimos el nucleo de T , que se denota por N(T ) o Ker(T ) Del ingleskernel significa nucleo), como el conjunto de todos los ~v ∈ V tal queT (~v) = ~0, es decir
N(T ) ={~v, ∈ V, T (~v) = ~0
}El subconjunto N(T ) nunca es vacıo, ya que ~0 ∈ N(T ) y esto se deduce
de que T (~0) = ~0 como ya fue demostrado. Se tiene ademas, el siguienteresultado:
PROPOSICION 3:Si T : V → W es una aplicacion lineal entre espacios vectoriales, N(T )
es un subespacio vectorial de V .Demostracion
54
PROPOSICION 4:Si T : V → W es una aplicacion lineal entre espacios vectoriales. La
imagen mediante T de cualquier subespacio vectorial de V es un subespaciovectorial de W .
Demostracion (ver Prop. 4 pag. 44)
PROPOSICION 5:Una aplicacion lineal T : V → W es inyectiva si y solo si N(T ) =
{~0}
.
Demostracion
EJEMPLOS
Este resultado que vimos en los ejemplos que relaciona las dimensionesdel nucleo de T y de su imagen es cierto en un contexto mas general, comose enuncia en el siguiente teorema:

55
TEOREMA 6:Sean V y W dos espacios vectoriales de los cuales V es de dimension finita
y T : V → W es una aplicacion lineal. Entonces
dim(N(T )) + dim(Im(T )) = dim(V )
.
Demostracion
Para deducir algunos corolarios de este teorema es necesario hacer uso delconcepto de rango que ya se ha visto antes.
Sea T una aplicacion entre los espacios vectoriales V y W , ambos dedimension finita, m y n respectivamente. Sea T la matriz de la aplicacionlineal en dos bases cualesquiera de V y W . Para encontrar el nucleo de T esnecesario resolver el sistema homogeneo T~x = ~0. Luego de hacer eliminaciongaussiana se obtienen n − r(T ) soluciones linealmente independientes quegeneran todas las restantes, denotando con r(T ) al rango de la matriz T .
56
Se puede concluir, entonces que
dim(N(T )) = dim(V )− r(T )
y comparando con el Teorema 6,
dim(Im(T )) = r(T )
Puesto que Im(T ) no depende de las bases que se elijan en V y W paraencontrar su matriz, de la igualdad anterior se deduce que todas las matricesde la aplicacion T tienen el mismo rango.
Podemos, por lo tanto, definir el rango de una aplicacion lineal T , queseguiremos escribiendo r(T ) como el rango de una cualquiera de sus repre-sentaciones matriciales.

57
CorolarioSean V y W dos espacios vectoriales de los cuales V es de dimension finita
y T : V → W es una aplicacion lineal. Entonces
1. T es inyectiva sı y solo sı r(T ) = dim(V )
2. T es suryectiva sı y solo sı r(T ) = dim(W )
Estudiamos, por ultimo las aplicaciones lineales biyectivas o isomorfis-mos entre espacios vectoriales. Supongamos que V y W son espacios vec-toriales de dimension finita, y que T es un isomorfismo entre ellos. Delcorolario anterior deducimos que
dim(V ) = r(T ) = dim(W )
Otras consecuencias sencillas de algunos resultados anteriores se resumenen el siguiente teorema
58
TEOREMA 7:Sean V y W espacios vectoriales de los cuales V es de dimension finita n
y sea T : V → W es una aplicacion lineal. Las siguientes condiciones sonequivalentes:
1. T es biyectiva
2. T es inyectiva
3.N(T ) ={~0}
4. T es suryectiva
5. El rango de T es n
Demostracion
Decimos que dos espacios vectoriales cualesquiera son isomorfos si po-demso encontrar un isomorfismo entre ellos. Para que esto ocurra entreespacios vectoriales de dimension finita ya vimos que ambos han de tenerla misma dimension. El recıproco tambien es cierto.

59
TEOREMA 8:Dado cualquier numero natural n, todos los espacios vectoriales de dimen-
sion n sobre un mismo cuerpo son isomorfos.
Demostracion
Ejemplos
NOTA:Si T es un isomorfismo entre dos espacios vectoriales V y W de dimensionn, por el Teorema 7, su rango es n, y por lo tanto la matriz M(T ) de Ten cualesquiera bases de V y W es invertible. La inversa de M(T ) es lamatriz de la aplicacion inversa de T .
60
2.4. Cambio de base para Aplicaciones Lineales
Sean V y W dos espacios vectoriales sobre el mismo cuerpo K de dimen-siones n y m, respectivamente. Sea T una aplicacion lineal de V en W conmatriz
T = (ai,j)i,j=1,n
con respecto a las bases B = {~e1, ~e2, · · · , ~en} y B ={~f1, ~f2, · · · , ~fn
}de V y W , respectivamente.
Si queremos conocer la matriz T ′ = (ai,j)i,j=1,n de la misma aplicacion T
respecto a dos nuevas basesB′ ={~e′1, ~e2, · · · , ~en
}y B′ =
{~f1, ~f2, · · · , ~fn
}de V y W , respectivamente, es necesario realizarlos cambios de base ade-cuados en los espacios inicial y final.
61
Para seguir el razonamiento, veamos el diagrama siguiente
V y=T(x) W
B= {~e1, ~e2, · · · , ~en}ai,j−→ =
{~f1, ~f2, · · · , ~fn
}↓ ↓
B′ ={~e′1, ~e′2, · · · , ~e′n
} a′i,j−→ ={~f ′1, ~f ′2, · · · , ~f ′n
}Si escribimos ~x ∈ V de la forma
x1~e1 + x2~e2 + · · · + xn~en = x′1~e′1 + x′2~e
′2 + · · · + x′n~e
′n
e ~y = T (~x) de la forma
y1~f1 + y2
~f2 + · · · + yn ~fn = y′1 ~f′1 + y′2 ~f
′2 + · · · + y′n ~f
′n
62
Los resultados de la seccion anterior, junto con los relativos al cambio debase en un mismo espacio vectorial, que se estudiaron antes, nos permitenescribir
y1y2y3· · ·yn
= T
x1x2x3· · ·xn
x1x2x3· · ·xn
= C
x′1x′2x′3· · ·x′n
y1y2y3· · ·yn
= D
y′1y′2y′3· · ·y′n
63
y y′1y′2y′3· · ·y′n
= T ′
x′1x′2x′3· · ·x′n
En las igualdades anteriores C y D son las matrices del cambio de base
de B′ a B y de B′ a B, respectivamente.
Sustituyendo, se obtiene
D
y′1y′2y′3· · ·y′n
= TC
x′1x′2x′3· · ·x′n

64
Como D es una matriz de cambio de base, tiene inversa, por lo tantoy′1y′2y′3· · ·y′n
= D−1TC
x′1x′2x′3· · ·x′n
Comparando esta expresion con (3) se obtiene
T ′ = D−1TC
que permite calcular la matriz T ′ de la aplicacion T con respecto a lasbases B′ y B′, conocida la matriz T de la misma aplicacion con respecto alas bases B y B′ y las matrices C y D del cambio de base B′ a B y de B′
a B, respectivamente.
65
En muchos casos los espacios inicial y final de una aplicacion coinciden.
Si, ademas, B y B coinciden y B′ y B′ coinciden, la formula del cambiode base es mas sencilla. Si T es la matriz de la aplicacion T ∈ L(V ) conrespecto a la base B de V , la matriz T ′ de la misma aplicacion con respectoa una base B′ de V esta dada por
T ′ = C−1TC
donde C es la matriz del cambio de base de B′ a B.
Observar que, en este caso det(T ′) = det(T ), ya que el determinante deun producto de matrices es el producto de los determinantes de cada unade ellas.

66
3. Espacio Dual de un Espacio Vectorial.
Dado un espacio vectorial V sobre un cuerpo K, podemos considerarel conjunto L(V,K) de todas las aplicaciones lineales de V en el espaciovectorial K (de dimension 1 sobre k).
Este espacio ya fue estudiado en general, y el Teorema 1 (pag. 49) de laseccion nos permite concluir que L(V,K) es un espacio vectorial sobre K.Este espacio vectorial recibe el nombre de espacio dual del espacio vectorialV y se utiliza comunmente el sımbolo
V ∗,
en lugar de L(V,K), para indicarlo. Por lo tanto V ∗ es el espacio vectorialde todas las aplicaciones lineales de V en K.
67
Los elementos de V ∗ son aplicaciones lineales, y por lo tanto, se indicarancon letras mayusculas. Si V es un espacio vectorial de dimension finita n, dely el Teorema 2 (pag. 50) se deduce que es espacio dual V ∗ tiene dimensionn. El teorema que sigue exhibe una base B∗ asociada de manera unica ynatural a una base B de V . La demostracion de ese teorema, mas general,que incluye a este ya fue dada, pero se incluye la demostracion para estecaso particular ya que puede servir para aclarar el caso general ya visto.
TEOREMA 1Sea V un espacio vectorial de dimension finita n y B = {~e1, ~e2, · · · , ~en}
una base de V . Existe una unica base
B∗ = {E1, E2, · · · , En}de V ∗ tal que Ei(~ei) = 1 para todo i = 1, · · · , n, y Ej(~ei) = 0 si i 6= j.
La base B∗ se denomina base dual de B.
Demostracion
68
NOTA:La propiedad de B∗ se escribe mas facilmente usando la delta (δ) de
Kronecker que ya se introdujo antes:
Ej(~ei) = δjiDemostracion
Ejemplos
4. Anulador de un subespacio.
Vamos a relacionar los subespacios de V con ciertos subespacios de V ∗.Esencialmente, dado un subespacio S de V consideraremos el conjunto detodas las ecuaciones lineales que se anulan en S y veremos que tiene unaestructura de subespacio.

69
DEFINICION:Sea V un espacio vectorial y sea S un subespacio de V . Se llama anulador
al conjuntoS0 = {f ∈ V ∗, f (s) = 0 ∀s ∈ S}= {f ∈ V ∗, f (S) = 0 S ∈ N(f )}
PROPOSICION 1: S0 es un subespacio de V ∗
Demostracion
PROPOSICION 2: Sea V un espacio vectorial de dimension n y seaS un subespacio de V . Entonces
dim(S0) = n− dim(S)
Demostracion