universidad de las palmas de gran canaria … · resumen 26 capítulo 3: diseño de filtros pasivos...
TRANSCRIPT

UNIVERSIDAD DE LAS PALMAS DE GRAN CANARIA
ESCUELA UNIVERSITARIA DE
INGENIERÍA TÉCNICA DE TELECOMUNICACIÓN
PROYECTO FIN DE CARRERA
DISEÑO DE UN FILTRO POLIFÁSICO ACTIVO EN TECNOLOGÍA
SiGe 0.35 µm PARA UN RECEPTOR BASADO EN EL
ESTÁNDAR IEEE 802.11a.
TITULACIÓN: SISTEMAS ELECTRÓNICOS
TUTORES: FRANCISCO JAVIER DEL PINO SUÁREZ
SUNIL LALCHAND KHEMCHANDANI AUTOR: DOLORES TAMARA DELGADO ALEMÁN FECHA: Noviembre 2006
© D
el d
ocum
ento
, de
los a
utor
es. D
igita
lizac
ión
real
izad
a po
r ULP
GC
. Bib
liote
ca u
nive
rsita
ria, 2
011

UNIVERSIDAD DE LAS PALMAS DE GRAN CANARIA
ESCUELA UNIVERSITARIA DE
INGENIERÍA TÉCNICA DE TELECOMUNICACIÓN
PROYECTO FIN DE CARRERA
DISEÑO DE UN FILTRO POLIFÁSICO ACTIVO EN TECNOLOGÍA
SiGe 0.35 µm PARA UN RECEPTOR BASADO EN EL
ESTÁNDAR IEEE 802.11a.
Presidente: Secretario: Vocal:
Tutores: Autor:
NOTA:
TITULACIÓN: SISTEMAS ELECTRÓNICOS
TUTORES: FRANCISCO JAVIER DEL PINO SUÁREZ
SUNIL LALCHAND KHEMCHANDANI AUTOR: DOLORES TAMARA DELGADO ALEMÁN FECHA: Noviembre 2006
© D
el d
ocum
ento
, de
los a
utor
es. D
igita
lizac
ión
real
izad
a po
r ULP
GC
. Bib
liote
ca u
nive
rsita
ria, 2
011

3
Índice
© D
el d
ocum
ento
, de
los a
utor
es. D
igita
lizac
ión
real
izad
a po
r ULP
GC
. Bib
liote
ca u
nive
rsita
ria, 2
011

© D
el d
ocum
ento
, de
los a
utor
es. D
igita
lizac
ión
real
izad
a po
r ULP
GC
. Bib
liote
ca u
nive
rsita
ria, 2
011

3
Capítulo 1: Introducción 9
1.1. Introducción 9
1.2. Receptor WLAN 12
1.3. Objetivos 14
1.4. Estructura de la memoria 15
1.5. Peticionario 16
Capítulo 2: Teoría general sobre filtros integrados 17
2.1. Según la función que desempeñan 17
2.2. Según los componentes que lo forman 21
2.2.1. Filtros pasivos 21
2.2.2. Filtros activos 21
2.2.3. Efectos de segundo orden 24
2.2.3.1. DC-offset 24
2.2.3.2. Ruido 24
2.2.3.3. Distorsión 24
2.3. Resumen 26
Capítulo 3: Diseño de filtros pasivos 27
3.1. Teoría general sobre filtros 27
3.2. Aproximación del filtro paso bajo ideal 28
3.2.1. Aproximación por el método de Butterworth 29
3.2.2. Aproximación por el método de Chebyshev 32
3.2.3. Aproximación por el método de Chebyshev
inverso 36
© D
el d
ocum
ento
, de
los a
utor
es. D
igita
lizac
ión
real
izad
a po
r ULP
GC
. Bib
liote
ca u
nive
rsita
ria, 2
011

4
3.2.4. Aproximación por el método Elíptico o de
Cauer 37
3.2.5. Aproximación por el método de Bessel-
Thomson 39
3.3. Aproximación del filtro paso bajo ideal mediante
la herramienta ADS 43
3.3.1. Aproximación por el método de Butterworth 44
3.3.2. Aproximación por el método de Chebyshev 46
3.3.3. Aproximación por el método de Chebyshev 48
inverso
3.3.4. Aproximación por el método Elíptico o de
Cauer 50
3.3.5. Aproximación por el método de Bessel-
Thomson 52
3.4. Comparación entre las distintas aproximaciones 54
3.5. Resumen 55
Capítulo 4: Filtros gm-C 57
4.1. OTA básico 57
4.2. Circuitos básicos con OTAs 58
4.3. Filtros de primer y segundo orden 61
4.4. Filtros de orden superior 64
4.5. Implementación del filtro gm-C 65
4.6. Resumen 68
Capítulo 5: OTAs reales: OTA de Nauta 69
5.1. Transconductor de Nauta 69
© D
el d
ocum
ento
, de
los a
utor
es. D
igita
lizac
ión
real
izad
a po
r ULP
GC
. Bib
liote
ca u
nive
rsita
ria, 2
011

5
5.2. Diseño del transconductor de Nauta 73
5.3. Obtención de los parámetros del transconductor de
Nauta a partir de las simulaciones 75
5.4. Realización del filtro activo paso bajo con el
transconductor de Nauta 81
5.5. Resumen 86
Capítulo 6: Filtro polifásico ideal 87
6.1. Teoría sobre los filtros polifásicos 88
6.2. Implementación del filtro polifásico 93
6.3. Resumen 96
Capítulo 7: Filtro polifásico con OTAs reales 97
7.1. Realización del filtro polifásico activo 97
7.2. Diseño de los nuevos transconductores de Nauta 99
7.2.1. Diseño del transconductor de Nauta “gmc1” 99
7.2.2. Diseño del transconductor de Nauta “gmcl1” 102
7.2.3. Diseño del transconductor de Nauta “gmc2” 103
7.2.4. Diseño del transconductor de Nauta “gmcl2” 104
7.2.5. Diseño del transconductor de Nauta “gmc3” 104
7.3. Simulación del filtro polifásico activo 104
7.4. Resumen 107
Capítulo 8: Conclusión 109
8.1. Conclusiones 110
8.2. Comparación con otros filtros polifásicos 113
© D
el d
ocum
ento
, de
los a
utor
es. D
igita
lizac
ión
real
izad
a po
r ULP
GC
. Bib
liote
ca u
nive
rsita
ria, 2
011

6
8.3. Líneas futuras 117
Capítulo 9: Presupuesto 119
9.1. Baremos utilizados 119
9.2. Cálculo del presupuesto 120
9.2.1. Costes debido a los recursos humanos 120
9.2.2. Costes de amortización de los equipos
informáticos y herramientas software 121
9.2.3. Otros costes 122
9.2.4. Presupuesto total 123
Anexo 127
Bibliografía 133
© D
el d
ocum
ento
, de
los a
utor
es. D
igita
lizac
ión
real
izad
a po
r ULP
GC
. Bib
liote
ca u
nive
rsita
ria, 2
011

9
Capítulo 1 Introducción
Las redes de área local inalámbricas (WLANs) constituyen una solución
tecnológica de gran interés en el sector de las comunicaciones inalámbricas de banda ancha.
Estos sistemas se caracterizan por trabajar en bandas de frecuencia exentas de licencia de
operación, lo cual dota a la tecnología de un gran potencial de mercado y le permite
competir con otro tipo de tecnologías de acceso inalámbrico de última generación como
UMTS o LMDS, ya que éstas últimas requieren un gran desembolso económico previo por
parte de los operadores del servicio. Sin embargo, las redes WLAN obligan al desarrollo de
una serie de equipos de bajo coste con unas prestaciones elevadas que hacen necesaria la
intervención de los circuitos que lo componen.
1.1. Introducción Originalmente las redes WLAN fueron diseñadas para el ámbito empresarial, pero
en la actualidad, han encontrado numerosos campos de aplicación, tanto públicos como
© D
el d
ocum
ento
, de
los a
utor
es. D
igita
lizac
ión
real
izad
a po
r ULP
GC
. Bib
liote
ca u
nive
rsita
ria, 2
011
INTRODUCCIÓN
10
privados: entorno residencial y del hogar, grandes redes corporativas, PYMES, zonas
industriales, campus universitarios, hospitales, ciber-cafés, hoteles, aeropuertos, medios
públicos de transporte, entornos rurales, etc. Incluso son ya varias las ciudades en donde se
han instalado redes inalámbricas libres para acceso a Internet.
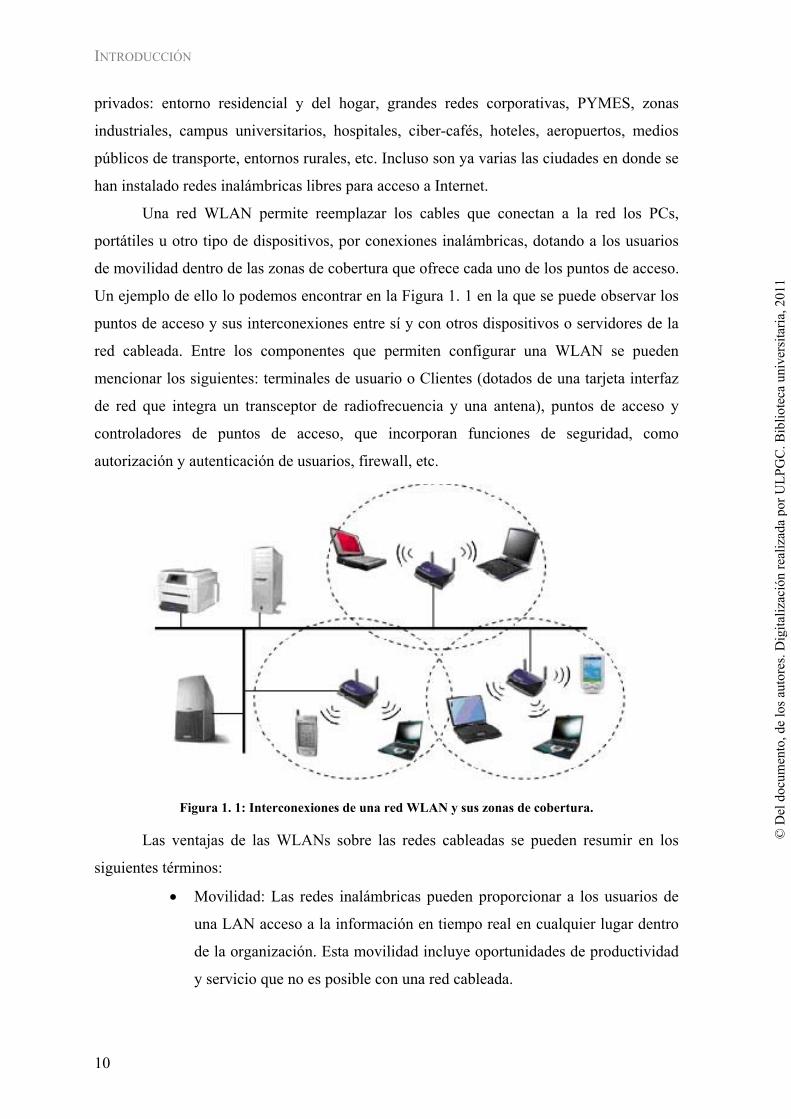
Una red WLAN permite reemplazar los cables que conectan a la red los PCs,
portátiles u otro tipo de dispositivos, por conexiones inalámbricas, dotando a los usuarios
de movilidad dentro de las zonas de cobertura que ofrece cada uno de los puntos de acceso.
Un ejemplo de ello lo podemos encontrar en la Figura 1. 1 en la que se puede observar los
puntos de acceso y sus interconexiones entre sí y con otros dispositivos o servidores de la
red cableada. Entre los componentes que permiten configurar una WLAN se pueden
mencionar los siguientes: terminales de usuario o Clientes (dotados de una tarjeta interfaz
de red que integra un transceptor de radiofrecuencia y una antena), puntos de acceso y
controladores de puntos de acceso, que incorporan funciones de seguridad, como
autorización y autenticación de usuarios, firewall, etc.
Figura 1. 1: Interconexiones de una red WLAN y sus zonas de cobertura.
Las ventajas de las WLANs sobre las redes cableadas se pueden resumir en los
siguientes términos:
• Movilidad: Las redes inalámbricas pueden proporcionar a los usuarios de
una LAN acceso a la información en tiempo real en cualquier lugar dentro
de la organización. Esta movilidad incluye oportunidades de productividad
y servicio que no es posible con una red cableada.
© D
el d
ocum
ento
, de
los a
utor
es. D
igita
lizac
ión
real
izad
a po
r ULP
GC
. Bib
liote
ca u
nive
rsita
ria, 2
011

DISEÑO DE UN FILTRO POLIFÁSICO ACTIVO PARA UN RECEPTOR BASADO EN EL ESTÁNDAR IEEE 802.11a
11
• Simplicidad y rapidez en la instalación: La instalación de una red
inalámbrica es rápida y fácil. Además elimina la necesidad de tirar cable a
través de paredes y techos.
• Flexibilidad en la instalación: La tecnología inalámbrica permite a la red ir
donde la cableada no puede ir.
• Coste de propiedad reducido: Mientras que la inversión inicial requerida
para una red inalámbrica puede ser más alta que el coste en hardware de
una LAN cableada, la inversión de toda la instalación y el coste del ciclo de
vida puede ser significativamente inferior. Los beneficios y costes a largo
plazo son superiores en ambientes dinámicos que requieren acciones y
movimientos frecuentes.
• Escalabilidad: Los sistemas de WLANs pueden ser configurados en una
variedad de topologías para satisfacer las necesidades de las instalaciones y
aplicaciones específicas. Las configuraciones son muy fáciles de cambiar y
además es muy sencilla la incorporación de nuevos usuarios a la red.
Existen diferentes estándares para el desarrollo de redes WLAN, los cuales se
pueden ver de forma resumida en la Tabla 1. 1. El mercado ofrece multitud de circuitos y
sistemas en las bandas más bajas (2.4 GHz), pero no para las bandas sobre los 5 GHz, en
las que todas las predicciones apuntan a un crecimiento espectacular de sus aplicaciones en
los próximos años. Por esta razón, en este proyecto nos centraremos en el estándar 802.11a,
el cual se define para redes inalámbricas en la banda de 5 GHz, y más concretamente en
desarrollo de los filtros necesarios en un receptor para este tipo de redes.
Tabla 1. 1: Distintas especificaciones para WLANs.
ESTÁNDAR VELOCIDAD
MÁXIMA MODULACIÓN
ANCHO DE
BANDA DE CANAL FRECUENCIA
802.11a 54 Mbps OFDM 20 MHz 5.0 GHz
802.11b 11 Mbps DSSS 25 MHz 2.4 GHz
802.11g 54 Mbps OFDM/DSSS 25 MHz 2.4 GHz
HomeRF2 10 Mbps FHSS 5 MHz 2.4 GHz
HiperLAN2 54 Mbps OFDM 25 MHz 5.0 GHz
© D
el d
ocum
ento
, de
los a
utor
es. D
igita
lizac
ión
real
izad
a po
r ULP
GC
. Bib
liote
ca u
nive
rsita
ria, 2
011

INTRODUCCIÓN
12
1.2. Receptor WLAN El receptor es un equipo de radiocomunicaciones que procesa una determinada
señal de entrada en información útil, añadiendo mínima distorsión.
La integración de una cadena de recepción, generalmente llamada front end, ofrece
numerosas ventajas sobre la conexión discreta de los distintos bloques que la componen,
estas ventajas incluyen:
• Reducción de efectos parásitos: reduciendo la longitud de las pistas
metálicas en los circuitos integrados con varios niveles de metalización, se
consiguen menos capacidades parásitas.
• Disminución del área: se puede optimizar el área colocando los dispositivos
fabricados muy juntos y en un mismo chip.
• Reducción del consumo, debido al propio escalado del nivel de integración.
• Disminución del coste de fabricación al necesitar menos intervención
humana en el montaje del circuito.
Un esquema general de receptor es el que se muestra en la Figura 1. 2.
FiltroRF
EtapaFI
LNA
Figura 1. 2: Esquema general de un receptor de radiofrecuencia.
El filtro de RF a la entrada del receptor elimina la señal no deseada obteniendo a su
salida la banda útil (ωRF). Seguidamente la señal se amplifica (LNA) y se convierte a una
frecuencia más baja (ωFI) para trabajar más cómodamente con ella. Este cambio de
frecuencia de ωRF a ωFI corre a cuenta del mezclador, el cual necesita, además de la señal
proveniente del LNA una señal de frecuencia fija proporcionada por un oscilador local en
la que ωLO=ωRF-ωFI. El resultado de esta operación son dos bandas, una centrada alrededor
de ωIF y otra en 2ωRF-ωFI. Un filtro paso bajo se encarga de eliminar esta última
componente, quedándonos con la banda deseada en ωFI.
MEZCLADOR
OL
© D
el d
ocum
ento
, de
los a
utor
es. D
igita
lizac
ión
real
izad
a po
r ULP
GC
. Bib
liote
ca u
nive
rsita
ria, 2
011

DISEÑO DE UN FILTRO POLIFÁSICO ACTIVO PARA UN RECEPTOR BASADO EN EL ESTÁNDAR IEEE 802.11a
13
Debido a que el mezclador no conserva la polaridad de la diferencia entre sus
entradas, traslada a la frecuencia ωFI tanto la banda superior como la inferior,
produciéndose entonces una degradación de la señal deseada. Este efecto, conocido como
frecuencia imagen (ωIM), se puede ver de forma gráfica en la Figura 1. 3.
FILTROPASOBAJO
ωFI ω
ωFI ωFI
ωLO ω
IMAGEN
ωωIM
BANDADESEADA
ωRF
Figura 1. 3: Representación de gráfica de la aparición de la frecuencia imagen en la banda deseada.
Existen diferentes técnicas que permiten eliminar la frecuencia imagen. La más
empleada consiste en el uso de un filtro de rechazo de imagen (ver Figura 1. 4) el cual se
diseña para tener unas pérdidas relativamente pequeñas en la banda deseada y una
atenuación grande en la banda imagen, dos requisitos que pueden ser simultáneamente
resueltos si 2ωFI es suficientemente grande.
FILTRORECHAZAIMAGEN
LNA
ω1 ωIM
2ωFI
ω
FILTRORECHAZAIMAGEN
IMAGEN
Figura 1. 4: Ejemplo gráfico de un filtro de rechazo de imagen.
© D
el d
ocum
ento
, de
los a
utor
es. D
igita
lizac
ión
real
izad
a po
r ULP
GC
. Bib
liote
ca u
nive
rsita
ria, 2
011

INTRODUCCIÓN
14
Sin embargo, el problema que se da en esta arquitectura es que el filtro de rechazo
de imagen por lo general no se puede integrar. Al tener que situarse fuera del chip, obliga
al LNA a presentar una impedancia de salida de 50Ω haciendo que sea más difícil alcanzar
los requerimientos de ruido, linealidad, ganancia y consumo de potencia del amplificador.
Además, los filtros de rechazo de imagen son caros y voluminosos, lo cual dificulta el
diseño de terminales de pequeño tamaño y bajo coste.
Otra técnica para disminuir la degradación sufrida por la señal debida a la
componente imagen es el empleo de arquitecturas de rechazo de imagen mediante
multiplicadores activos. La idea de estas arquitecturas es procesar la señal y la frecuencia
imagen de forma distinta, posibilitando la cancelación de la imagen mediante las réplicas
negativas. La distinción entre la señal y la imagen es posible porque las dos caen en
diferentes lados de la frecuencia del oscilador local. Estas arquitecturas son la arquitectura
Hartley y la arquitectura Weaver [4] y el problema que presentan es que aumentan
considerablemente la complejidad del terminal, ya que incluyen dos o más multiplicadores
así como filtros paso bajo y sumadores de señal.
Como alternativa a estas estructuras, una técnica que ha cobrado fuerza en los
últimos años es la sustitución del filtro paso bajo situado al final del cabezal por un filtro
polifásico. Este tipo de filtros, también llamados filtros complejos, permiten el rechazo de
la frecuencia imagen a frecuencias bajas y suponen sólo un pequeño aumento de la
complejidad de los filtros paso bajo que, de cualquier modo, hay que situar antes de los
convertidores analógico digital (ADC).
1.3. Objetivos En el presente proyecto se verá la forma de diseñar un filtro polifásico activo
centrado en 20MHz a partir de un filtro paso bajo pasivo prototipo. Todo ello se hará
ayudándonos del software “Advanced Design System” (ADS), [9], y del diseño de los
transconductores de Nauta [5] que ayudarán a terminar el filtro polifásico real para un
receptor basado en el estándar de comunicaciones inalámbrico IEEE 802.11a.
Las especificaciones técnicas pretendidas para el filtro polifásico se exponen de
forma detallada en la siguiente tabla:
© D
el d
ocum
ento
, de
los a
utor
es. D
igita
lizac
ión
real
izad
a po
r ULP
GC
. Bib
liote
ca u
nive
rsita
ria, 2
011

DISEÑO DE UN FILTRO POLIFÁSICO ACTIVO PARA UN RECEPTOR BASADO EN EL ESTÁNDAR IEEE 802.11a
15
Tabla 1.1: Especificaciones del filtro polifásico.
Parámetros Especificaciones
Tipo de filtro Butterworth
Frecuencia central 20MHz
Ancho de banda 20MHz
Rechazo de banda -30dB
1.4. Estructura de la memoria La memoria se desarrollará en ocho capítulos acompañados de un Anexo, del
presupuesto y de la bibliografía. A continuación presentamos un breve resumen de cada
capítulo:
En el capítulo 2 veremos la teoría general sobre los filtros integrados donde se
explicarán los distintos tipos de filtros, sus ventajas, desventajas y los efectos a los
que están expuestos.
En el capítulo 3 se desarrollará más detalladamente el diseño de filtros pasivos.
Este capítulo lo podemos separar en dos partes, una teórica, donde se explica
exhaustivamente la teoría de algunas aproximaciones de los filtros paso bajo, y otra
práctica, en la cual se desarrollan los mismos filtros a partir de la herramienta
software ADS.
En el capítulo 4 hablamos de los filtros activos y más concretamente de aquellos
realizados con transconductores y condensadores (filtros Gm-C). En este capítulo
se verá cómo elementos pasivos, como las bobinas o las resistencias, pueden ser
sustituidos por transconductores, disminuyendo el tamaño del circuito y obteniendo
mejores resultados de diseño. Como remate a este capítulo veremos un ejemplo de
transformación de un filtro paso bajo pasivo prototipo creado por ADS, en un filtro
paso bajo activo con transconductores ideales.
En el capítulo 5 descubrimos el transconductor real que vamos a utilizar para
nuestro proyecto, el transconductor de Nauta. Estudiaremos el diseño del mismo y
los resultados obtenidos tras sustituir los transconductores ideales del filtro paso
bajo activo del capítulo anterior por los de Nauta.
En el capítulo 6 se hará un estudio teórico del filtro polifásico ideal, desde las
ecuaciones a las que responde el filtro teniendo en cuenta su posición en un
receptor, hasta las ecuaciones necesarias para crearlo a partir de un filtro paso bajo.
© D
el d
ocum
ento
, de
los a
utor
es. D
igita
lizac
ión
real
izad
a po
r ULP
GC
. Bib
liote
ca u
nive
rsita
ria, 2
011

INTRODUCCIÓN
16
Para poner en práctica esta teoría, se ha implementado el filtro polifásico
especificado en el proyecto con transconductores ideales.
En el capítulo 7 se diseñan nuevos transconductores de Nauta necesarios para que
se produzca el desplazamiento en frecuencias del filtro paso bajo y se convierte en
un filtro polifásico. Una vez hecho esto se estudiará el resultado y se comparará con
el obtenido con el filtro polifásico ideal.
Por último, en el capítulo 8 se resumen las principales conclusiones y líneas de
trabajo abiertas a raíz de este proyecto. Por otro lado, se compara el diseño con
otros trabajos similares, observando los distintos procedimientos tomados y
aportando nuevas soluciones.
1.5. Peticionario Actúa como peticionario para este proyecto fin de carrera, la división de
Tecnología Microelectrónica (TME) del Instituto Universitario de Microelectrónica
Aplicada (IUMA) de la ULPGC.
© D
el d
ocum
ento
, de
los a
utor
es. D
igita
lizac
ión
real
izad
a po
r ULP
GC
. Bib
liote
ca u
nive
rsita
ria, 2
011

17
Capítulo 2 Teoría general sobre filtros integrados
Un filtro es un dispositivo diseñado para dejar pasar todas las frecuencias dentro de
un rango especificado (banda de paso) y rechazar todas las frecuencias fuera de ese rango
(banda de rechazo). Idealmente, un filtro tiene pérdidas cero en la banda de paso y pérdidas
infinitas en la banda de rechazo, no causando ninguna distorsión a la señal que pasa a
través de él. Existen diferentes criterios para definir los filtros, éstos se explicarán a medida
que se avance en el capítulo.
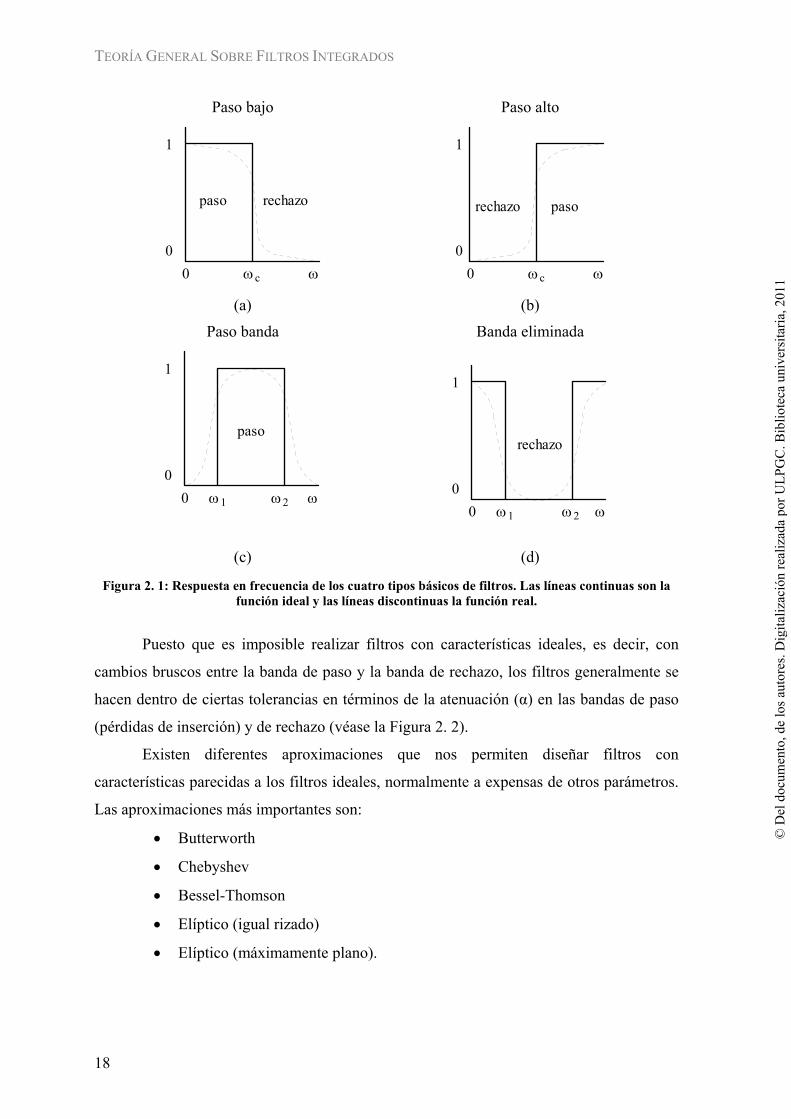
2.1. Según la función que desempeñan De acuerdo a la función que realizan los filtros se clasifican como: paso bajo (LPF),
paso alto (HPF), paso banda (BPF) y rechazo banda (SBF). En la Figura 2.1 se puede
observar un ejemplo de ellos.
© D
el d
ocum
ento
, de
los a
utor
es. D
igita
lizac
ión
real
izad
a po
r ULP
GC
. Bib
liote
ca u
nive
rsita
ria, 2
011
TEORÍA GENERAL SOBRE FILTROS INTEGRADOS
18
Paso bajo Paso alto
ωc ω0
1
0
paso rechazo
ωc ω0
pasorechazo
1
0
(a) (b)
Paso banda Banda eliminada
ω1 ω0 ω2
paso
1
0
ω1 ω0 ω2
rechazo
1
0
(c) (d)
Figura 2. 1: Respuesta en frecuencia de los cuatro tipos básicos de filtros. Las líneas continuas son la función ideal y las líneas discontinuas la función real.
Puesto que es imposible realizar filtros con características ideales, es decir, con
cambios bruscos entre la banda de paso y la banda de rechazo, los filtros generalmente se
hacen dentro de ciertas tolerancias en términos de la atenuación (α) en las bandas de paso
(pérdidas de inserción) y de rechazo (véase la Figura 2. 2).
Existen diferentes aproximaciones que nos permiten diseñar filtros con
características parecidas a los filtros ideales, normalmente a expensas de otros parámetros.
Las aproximaciones más importantes son:
• Butterworth
• Chebyshev
• Bessel-Thomson
• Elíptico (igual rizado)
• Elíptico (máximamente plano).
© D
el d
ocum
ento
, de
los a
utor
es. D
igita
lizac
ión
real
izad
a po
r ULP
GC
. Bib
liote
ca u
nive
rsita
ria, 2
011

DISEÑO DE UN FILTRO POLIFÁSICO ACTIVO PARA UN RECEPTOR BASADO EN EL ESTÁNDAR IEEE 802.11a
19
Paso bajo Paso alto
ωs ω00
αmax
αmin
α,dB
ωp ωs ω0
α,dB
0ωp
αmax
αmin
(a) (b)
Paso banda Banda eliminada
ωs1ω
0 ωs2
αmax0
ωp1 ωp2
αmin
α,dB
αmin
ωp1ω
0 ωp2
αmax
0ωs1 ωs2
αmin
α,dB
αmax
(c) (d)
Figura 2. 2: Especificaciones prácticas de la atenuación del filtro.
Los filtros Butterworth (en la Figura 2. 3 (a)) están diseñados para producir la
respuesta más plana posible en la banda de paso. Esto significa que el valor de las pérdidas
de inserción de este tipo de filtros es igual a las pérdidas de inserción máximas en el centro
de la banda de paso y aumenta hasta un valor determinado en el borde de la banda de
transición. A partir de este punto las pérdidas de inserción aumentan mucho más
rápidamente que en la banda de paso. Debido a que la respuesta es plana en la banda de
paso, este tipo de filtros tiende a manifestar una baja distorsión de amplitud y fase. Como
contrapartida, los filtros Butterworth presentan un rechazo fuera de la banda de paso no tan
bueno como el de otros tipos de filtro.
La respuesta de los filtros Chebyshev (mostrado en la Figura 2. 3 (c)) presenta un
rizado en la banda de paso, es decir, las pérdidas de inserción varían entre un mínimo y un
máximo a lo largo de toda la banda de paso. Esto implica que la distorsión de amplitud y
fase de estos filtros sea mayor pero, como compensación, las características de rechazo de
los filtros de Chebyshev son superiores a las de los filtros de Butterworth. De esta forma,
con pocos componentes y, a pesar de tener una distorsión en amplitud y fase más alta, se
© D
el d
ocum
ento
, de
los a
utor
es. D
igita
lizac
ión
real
izad
a po
r ULP
GC
. Bib
liote
ca u
nive
rsita
ria, 2
011

TEORÍA GENERAL SOBRE FILTROS INTEGRADOS
20
puede conseguir que las pérdidas de inserción sean las especificadas en la banda de
rechazo.
Los filtros de Bessel-Thomson (Figura 2. 3 (b)) son una aproximación lineal en fase,
es decir, tienen una fase aproximadamente lineal. Fuera de la banda de paso, las pérdidas
de inserción aumentan gradualmente. En la banda de rechazo no tiene una respuesta tan
buena como en los filtros de Butterworth o de Chebyshev, (la pendiente de bajada tiene un
de valor 6·n dB/octava, donde n es el orden del polinomio de Bessel en la aproximación
paso bajo).
Las respuestas elípticas máximamente plana y de igual rizado son idénticas en la
banda de paso a las de los filtros de Butterworth y de Chebyshev, respectivamente (ver la
Figura 2. 3 (d)). Sin embargo, hay una diferencia muy importante en la banda de rechazo, y
es que las pérdidas de inserción alcanzan un valor infinito en una o más frecuencias de la
misma banda. La ventaja de este tipo de filtros es que la transición es mucho más rápida,
aunque su estructura sea un poco más compleja.
Aproximación de Butterworth Aproximación de Bessel
0.5 1.0 1.5 2.0 2.50.0 3.
-30
-20
-10
-40
0
freq, GHz 0.5 1.0 1.5 2.0 2.50.0 3.
-25
-20
-15
-10
-5
-30
0
freq, GHz
(a) (b)
Aproximación de Chebyshev Aproximación Elíptica
0.5 1.0 1.5 2.0 2.50.0 3.0
-40
-30
-20
-10
-50
0
freq, GHz 0.5 1.0 1.5 2.0 2.50.0 3.0
-40
-30
-20
-10
-50
0
freq, GHz
(c) (d)
Figura 2. 3: Funciones de transferencia típicas para filtros de cuatro polos.
© D
el d
ocum
ento
, de
los a
utor
es. D
igita
lizac
ión
real
izad
a po
r ULP
GC
. Bib
liote
ca u
nive
rsita
ria, 2
011
DISEÑO DE UN FILTRO POLIFÁSICO ACTIVO PARA UN RECEPTOR BASADO EN EL ESTÁNDAR IEEE 802.11a
21
2.2. Según los componentes que lo forman De acuerdo con la naturaleza de los componentes usados para implementar el filtro
podemos distinguir entre dos tipos principales de filtros: los filtros pasivos y los filtros
activos.
2.2.1. Filtros pasivos
Un filtro pasivo es simplemente un filtro que no utiliza ningún elemento que
amplifica (transistores, amplificadores operacionales, etc.). En términos del número de
componentes necesarios, los filtros pasivos son la implementación más simple de una
función de transferencia dada. Estos filtros tienen otras ventajas como:
• Debido a que no tienen ningún componente activo, no requieren ninguna fuente
de alimentación.
• Su respuesta no está acotada por las limitaciones en ancho de banda de
amplificadores operacionales o cualquier otro tipo de circuito activo y, por tanto,
pueden trabajar bien en alta frecuencia.
• Los filtros pasivos se pueden utilizar en aquellas aplicaciones que implican
corrientes o tensiones elevadas.
• Generan poco ruido en comparación con los circuitos que usan elementos
activos.
• El ruido que producen es simplemente ruido térmico de los componentes
resistivos y, si tenemos cuidado en el diseño, la amplitud de este ruido puede
ser muy baja.
Sin embargo, presentan algunas desventajas importantes en ciertas aplicaciones:
• Al no utilizar ningún elemento activo, no pueden proporcionar ganancia.
• Además, para la síntesis de la mayoría de filtros pasivos son necesarios varios
inductores y el coste que implica su uso en circuitos integrados, en términos de
área, puede ser prohibitivo.
2.2.2. Filtros activos
Los filtros activos utilizan elementos que amplifican, especialmente amplificadores
operacionales (OA) y amplificadores operacionales transconductores (OTA), junto con
resistencias y condensadores en sus lazos de realimentación.
Existe una serie de ventajas asociadas a este tipo de filtros:
© D
el d
ocum
ento
, de
los a
utor
es. D
igita
lizac
ión
real
izad
a po
r ULP
GC
. Bib
liote
ca u
nive
rsita
ria, 2
011

TEORÍA GENERAL SOBRE FILTROS INTEGRADOS
22
• Pueden tener ganancia y además su impedancia de entrada y salida se puede
ajustar a los valores deseados (en general esto no es siempre posible con los
filtros pasivos).
• Son más fáciles de diseñar que los filtros pasivos (sobretodo si los comparamos
con los distribuidos).
• Su cualidad más importante es, posiblemente, que carecen de inductores, de tal
modo que se eliminan los problemas asociados a estos componentes.
Al igual que los pasivos también poseen una serie de desventajas:
• El funcionamiento en alta frecuencia está limitado por el producto ganancia-
ancho de banda de los elementos que amplifican.
• Los filtros activos generan ruido debido a la circuitería de amplificación,
aunque haciendo un diseño cuidadoso y usando amplificadores de bajo ruido
esto se puede reducir al mínimo.
En [1] se puede encontrar una descripción detallada de los filtros activos basados en
OA.
Otro tipo de filtros, llamados filtros de condensadores o capacidades conmutadas,
supera algunos de los problemas inherentes a los filtros activos normales y añade algunas
nuevas cualidades interesantes. Este tipo de filtros no necesita ningún condensador o
inductor externo y su frecuencia de corte se puede fijar en un amplio rango con una
exactitud muy alta (típicamente de 0.2%) mediante el uso de una frecuencia de reloj
externa. Esto permite hacer diseños robustos y con alta repetibilidad con el coste reducido
de osciladores baratos controlados por un cristal. Un detalle a tener en cuenta de este tipo
de filtros es su baja sensibilidad a cambios de temperatura.
La principal diferencia entre los filtros de capacidades conmutadas y los filtros
activos convencionales es que trabajan con datos muestreados, es decir, trabajan en tiempo
discreto en lugar de en tiempo continuo.
El funcionamiento de los filtros de capacidades conmutadas se basa en la
posibilidad de simular el funcionamiento de resistencias mediante el uso de condensadores
integrados y conmutadores MOS. Si bien la tolerancia en el valor absoluto de las
capacidades integradas es alta, su tolerancia con respecto a otros condensadores del chip se
puede ajustar muy bien, dando por resultado filtros integrados cuyas frecuencias de corte
son proporcionales y determinadas únicamente por la frecuencia del reloj externo.
© D
el d
ocum
ento
, de
los a
utor
es. D
igita
lizac
ión
real
izad
a po
r ULP
GC
. Bib
liote
ca u
nive
rsita
ria, 2
011

DISEÑO DE UN FILTRO POLIFÁSICO ACTIVO PARA UN RECEPTOR BASADO EN EL ESTÁNDAR IEEE 802.11a
23
La principal desventaja de los filtros conmutados es que presentan mucho más
ruido a su salida (tanto ruido aleatorio como del propio reloj) que los circuitos activos
convencionales. Además, su frecuencia máxima de operación está limitada por el ancho de
banda de los dispositivos activos [2]. Debido a esta limitación, la aproximación de
capacidades conmutadas no se suele utilizar para el filtrado en alta frecuencia, por lo que la
solución más común es utilizar los filtros activos basados en OTA.
La mayoría de los OA se basan en la conexión en cascada de dos o más etapas de
amplificación. Esta configuración proporciona una ganancia elevada pero convierte al
circuito en inestable. Para evitar esta inestabilidad, se suele usar por lo general una red de
realimentación de compensación, la cual disminuye el producto ganancia-ancho de banda
(GBW) del OA. Un OTA no es más que un OA sin la segunda etapa. Esto significa que
hay menos nodos internos en el circuito y, por tanto, hay un aumento en el ancho de banda
del circuito.
Por esta razón, los filtros activos basados en OTA están especialmente indicados a
la realización de filtros integrados de alta frecuencia. Este método de diseño utiliza
solamente transconductores y condensadores y se denominan filtros gm-C. Aunque la
aplicación fundamental de este método de diseño son los filtros de alta frecuencia, los
circuitos gm-C se pueden utilizar también para el diseño de filtros integrados en
frecuencias bajas.
La Figura 2. 4 muestra una clasificación de los filtros según el rango de frecuencias
de funcionamiento. Como se puede apreciar, la aproximación gm-C es el método más
conveniente para diseño de filtros de frecuencias intermedias (FI).
10 101 102 103 104 105 106 107 108 109 1010
Filtros RC discretos analógicos
Filtros SC
Filtros gm-C
Filtros pasivos LC
Filtros distribuidos(guia-ondas)
Figura 2. 4: Clasificación de los filtros según el rango de frecuencias de funcionamiento.
© D
el d
ocum
ento
, de
los a
utor
es. D
igita
lizac
ión
real
izad
a po
r ULP
GC
. Bib
liote
ca u
nive
rsita
ria, 2
011

TEORÍA GENERAL SOBRE FILTROS INTEGRADOS
24
2.2.3. Efectos de segundo orden
Además de inexactitudes de la aproximación teórica, los efectos de segundo orden
más significativos son los siguientes: DC-offset, ruido y distorsión.
2.2.3.1. DC-offset
Los offsets de continua pueden corromper la señal y, peor todavía, podrían
saturar las etapas siguientes. Este efecto es más importante en filtros paso bajo
puesto que los paso banda no usan la frecuencia cero. En caso necesario habrá
que compensar este efecto mediante sistemas más o menos sofisticados que
permitan el calibrado.
2.2.3.2. Ruido
El ruido creado por los dispositivos semiconductores está presente en la
salida de cualquier filtro construido con componentes activos. En la mayoría de
los casos, las últimas etapas del filtro quitan el ruido presente en la banda de
rechazo generado por las etapas precedentes, pero no hacen lo mismo con el ruido
de la banda de paso. En la mayoría de los sistemas el ruido presenta pocos
problemas ya que los filtros de FI están conectados generalmente a un
convertidor analógico digital (ADC) y la magnitud del ruido raramente excede
del valor del bit menos significativo. Sin embargo, si queremos mejorar la
exactitud de los datos deberemos reducir el ruido tanto como sea posible.
2.2.3.3. Distorsión
Si los circuitos activos con los que está hecho el filtro presentan no
linealidades, a la salida aparecerán componentes armónicas de la frecuencia de la
señal de entrada. Estos armónicos se convierten en entradas al convertidor ADC,
que los transforma a digital con el resto de la señal. Igual que sucedía con el
ruido, cada etapa del filtro paso bajo quita las componentes de la distorsión de la
banda de rechazo que genera la etapa anterior. El nivel de distorsión varía con la
frecuencia de la señal de entrada, la amplitud, la función de transferencia y la
frecuencia de corte.
La distorsión armónica total (THD) es una especificación usada a menudo
como representación numérica de la distorsión presente en la salida de un circuito
activo. Este número es la suma del valor eficaz de las distorsiones armónicas
© D
el d
ocum
ento
, de
los a
utor
es. D
igita
lizac
ión
real
izad
a po
r ULP
GC
. Bib
liote
ca u
nive
rsita
ria, 2
011

DISEÑO DE UN FILTRO POLIFÁSICO ACTIVO PARA UN RECEPTOR BASADO EN EL ESTÁNDAR IEEE 802.11a
25
individuales (es decir 2º, 3º...etc.) creada por la no linealidad de los componentes
activos y pasivos en el circuito cuando es atacado por una entrada sinusoidal pura
con una amplitud y una frecuencia dadas. Su medida requiere una entrada
sinusoidal de muy baja distorsión, la eliminación de la componente
correspondiente a la frecuencia fundamental de la salida y la medida de amplitud
de los armónicos restantes que son, típicamente, de 60 dB a 140 dB menores que
el fundamental.
En los filtros activos, la THD se especifica generalmente en dBc (dB
relativos a la amplitud de la componente fundamental) en una frecuencia y
amplitud específicas (por ejemplo 10Vp-p para una frecuencia de 1 KHz).
La figura de mérito que relaciona los dos parámetros últimos, el ruido y la
distorsión, es el rango dinámico (DR). El DR se define generalmente como el
nivel de entrada máximo que el circuito puede tolerar respecto al mínimo nivel de
entrada para el cual el circuito proporciona una calidad razonable de señal.
En un filtro activo, las no linealidades definen el extremo superior
(típicamente: la tensión de entrada máxima para tener un THD del 1%) y el ruido
el extremo inferior.
Las no linealidades en un filtro paso bajo se pueden medir mediante el THD
(véase la Figura 2. 5 (a)). Sin embargo, en el caso de un circuito paso banda, una
medida más adecuada es la intermodulación de tercer orden, creada por dos tonos
en la banda o combinaciones de dos tonos en la banda de rechazo que producen
espurios en la banda de paso (Figura 2. 5 (b)). Esta no linealidad es caracterizada
por el punto de intercepción de tercer orden (IP3). Cuando la definición del rango
dinámico se basa en el comportamiento de la intermodulación, el rango dinámico
se llama “rango dinámico libre de espurios” (SFDR), [1].
© D
el d
ocum
ento
, de
los a
utor
es. D
igita
lizac
ión
real
izad
a po
r ULP
GC
. Bib
liote
ca u
nive
rsita
ria, 2
011

TEORÍA GENERAL SOBRE FILTROS INTEGRADOS
26
FILTRO ADC
(a)
FILTRO ADC
(b)
Figura 2. 5: Distorsión producida por la no linealidad en un filtro (medida con el THD) (a). Distorsión producida por la intermodulación (medida con el IP3) (b).
2.3. Resumen A lo largo de este capítulo hemos presentado diferentes clases de filtros, desde los
ideales, que nunca se implementarán debido a sus cambios imposibles de señal, hasta los
filtros reales, que se clasifican de dos maneras, según la función a desempeñar o según los
componentes que lo forman.
Según la función que vayan a desempeñar pueden ser filtros paso bajo (LPF), paso
alto (HPF), paso banda (BPF) o rechazo banda (SBF), realizándose a partir de una de las
cinco aproximaciones que creamos conveniente (Butterworth, Chebyshev, Chebyshev
inverso o Elíptico).
Según los componentes que lo forman pueden ser filtros pasivos, formados por
componentes que no ofrecen ganancia, o filtros activos, creados por amplificadores y
transconductores que limitan su ancho de banda en alta frecuencia pero más sencillos de
diseñar.
El objeto de este proyecto es diseñar un filtro polifásico a 20MHz con OTAs reales
a partir de un filtro Butterworth paso bajo pasivo, todo ello teniendo en cuenta las
limitaciones propias de cada tipo de filtro y ayudándonos de la herramienta software
Advanced Design System (ADS), [9], para un diseño óptimo.
Antes de iniciar el diseño del filtro polifásico, explicaremos en el próximo capítulo
las características de las distintas aproximaciones para la creación de filtros expuestas al
comienzo de este capítulo, así, podremos apreciar sus diferencias desde el punto de vista
teórico.
© D
el d
ocum
ento
, de
los a
utor
es. D
igita
lizac
ión
real
izad
a po
r ULP
GC
. Bib
liote
ca u
nive
rsita
ria, 2
011

27
Capítulo 3 Diseño de filtros pasivos
Una vez conocidos los tipos de filtros en el capítulo anterior, vamos a crearlos
basándonos en la teoría de cada uno [3]. Como bien se puede deducir, este capítulo será
meramente teórico y, si el lector lo desea, se lo puede saltar, ya que, como se verá al final
de éste y posteriores capítulos, la herramienta para diseñar filtros en general será software
[9].
3.1. Teoría general sobre filtros En la práctica, las especificaciones de los filtros se dan en términos de la frecuencia
(o frecuencias) de corte ( cω ), la desviación o error máximo permitido en la banda de paso
(Amáx), la frecuencia o frecuencias límite de la banda de rechazo ( Sω ) y la atenuación
mínima en la banda de rechazo (Amin). A partir de estas especificaciones podremos dibujar
un diagrama en magnitud de la respuesta en frecuencia del filtro. Un ejemplo de ello se
© D
el d
ocum
ento
, de
los a
utor
es. D
igita
lizac
ión
real
izad
a po
r ULP
GC
. Bib
liote
ca u
nive
rsita
ria, 2
011

DISEÑO DE FILTROS PASIVOS
28
muestra en la Figura 3. 1 donde se representa la respuesta de un filtro paso bajo que debe
estar dentro de los límites impuestos en el diagrama.
Figura 3. 1: Posible respuesta que cumple las especificaciones de un filtro paso bajo.
Por lo general, trabajamos con funciones paso bajo debido a su simplicidad, ya que
las respuestas de los otros filtros (HPF, BPF y SBF) pueden obtenerse a partir de filtros
paso bajo mediante una transformación conveniente de frecuencia.
La dificultad radica en encontrar una respuesta F(s) en magnitud y/o fase que se
aproxime a la curva predefinida. El problema de la aproximación, que así es como nos
referiremos a ella, ha sido solventado matemáticamente por varias vías, siendo las
funciones más conocidas las de:
• Butterworth (máximamente plano)
• Chebyshev (igual rizado)
• Bessel-Thomson
• Elíptico igual rizado o también conocido como Cauer
• Elíptico máximamente plano.
3.2. Aproximación del filtro paso bajo ideal En la Figura 3. 2 se muestra la respuesta en amplitud de un filtro paso bajo ideal
con una frecuencia de corte normalizada de 1=cω . Si aceptamos un pequeño error en la
banda de paso y una banda de transición no muy abrupta, podemos buscar una función F(s)
donde la magnitud de la misma se aproxime lo máximo posible a la respuesta ideal. Una
función genérica que cumple estas características puede ser la siguiente:
© D
el d
ocum
ento
, de
los a
utor
es. D
igita
lizac
ión
real
izad
a po
r ULP
GC
. Bib
liote
ca u
nive
rsita
ria, 2
011

DISEÑO DE UN FILTRO POLIFÁSICO ACTIVO PARA UN RECEPTOR BASADO EN EL ESTÁNDAR IEEE 802.11a
29
[ ] 2/122 )(11)()(ωε
ωωw
MjF+
==
[ ] 2/1211)(
nM
ωω
+=
(3.1)
Dondeε es una constante con un valor comprendido entre cero y uno )10( ≤≤ ε ,
dependiendo del error estipulado para la banda de paso, y )( 2ωw es una función de 2ω tal
que:
para
para
•
•
1
10
>
≤≤
ω
ω →
→
1)(
1)(0
2
2
>>
≤≤
ω
ω
w
w
En general, el numerador de )(ωM puede tener otra constante distinta a la unidad, lo
que implica la ganancia (o atenuación) en 0=ω (es decir, en dc).
Figura 3. 2: Respuesta de la amplitud de un filtro paso bajo ideal.
3.2.1. Aproximación por el método de Butterworth o máximamente plano
Si en la ecuación (3.1), hacemos 1=ε y nw 22 )( ωω = siendo n un número entero,
real y positivo, podemos obtener la siguiente ecuación para la amplitud:
(3.2)
Se puede observar que 1)0( =M y que )(ωM decrece conω .
Para 1=cω :
707.02
1)1( ==M
o
01.32log10)1(log20 −=−=M dB
© D
el d
ocum
ento
, de
los a
utor
es. D
igita
lizac
ión
real
izad
a po
r ULP
GC
. Bib
liote
ca u
nive
rsita
ria, 2
011

DISEÑO DE FILTROS PASIVOS
30
ωω log20)(log20 nM −=
njFjFjFM 222
11)()()()(ω
ωωωω+
=−==
nn ssFsF 2)1(1
1)()(−+
=−
)()()( 2 sFsFsP −=
En otras palabras, para 1=cω , la amplitud está 3dB por debajo de su valor en dc.
Ésta será la frecuencia de corte del filtro, la cual, no depende del orden del mismo (n). El
orden del filtro lo que determina es cuanto se aproxima la función )(ωM a la ideal.
La ecuación (3.2) expresa la respuesta en amplitud de los filtros de Butterworth. La
aproximación de Butterworth es también conocida como aproximación máximamente
plana, debido a que las primeras 12 −n derivadas de )(ωM son cero en 0=ω . El error en
la banda de paso es cero en 0=ω y máximo en la frecuencia de corte (3dB). Entre 0=ω y
1=ω , el error toma valores intermedios aumentando a medida que crece ω . Para valores
de 1>>ω , )(ωM se comporta aproximadamente como:
nMω
ω 1)( =
Es decir, cae alrededor de 20n dB/décadas.
(3.3)
Para buscar una función de red F(s) cuya magnitud con ωjs = sea )(ωM ,
haremos lo siguiente:
(3.4)
Sustituyendo ωj por s nos queda:
(3.5)
Definiendo una función )( 2sP tal que cumpla que:
(3.6)
Y que:
)()( 22 ωω −= PM
entonces, puesto que conocemos )( 2ω−P a partir de )(2 ωM , podemos obtener )( 2sP
cambiando 2ω− por 2s en la ecuación (3.4). Si expresamos )( 2sP en la forma
definida por la ecuación (3.6), podemos observar que los polos de )(sF son simétricos
a los de )( sF − sobre el eje ωj . Dado que )(sF debe ser una función estable, sus polos
son idénticos a los de )( 2sP pero con la parte real negativa. Los polos de )( 2sP son las
raíces de la ecuación:
© D
el d
ocum
ento
, de
los a
utor
es. D
igita
lizac
ión
real
izad
a po
r ULP
GC
. Bib
liote
ca u
nive
rsita
ria, 2
011

DISEÑO DE UN FILTRO POLIFÁSICO ACTIVO PARA UN RECEPTOR BASADO EN EL ESTÁNDAR IEEE 802.11a
31
0)1(1 2 =−+ nn s
⎟⎠⎞
⎜⎝⎛ −
+⎟⎠⎞
⎜⎝⎛ −
−=+= ππωσn
kjn
ksenjs kkk 212cos
212
(3.7)
Se puede demostrar que la solución es la siguiente:
(3.8)
Donde k puede tomar los valores k = 1, 2, ..., 2 n.
Los n polos de )(sF se obtienen a partir de la ecuación anterior. Todos ellos tienen
una magnitud igual a la unidad y caen de forma equidistante sobre la circunferencia unidad.
Por ejemplo, considerando el caso para n = 4, tenemos:
82
11)(ω
ω+
=M
con ello podemos decir que:
82
11)(s
sP+
=
Los polos de )( 2sP se obtienen de la ecuación (3.8) para k = 1, 2, ..., 8, y se observa
que se sitúan en la circunferencia unidad tal y como muestra la Figura 3. 3.
Figura 3. 3: Polos de un filtro Butterworth para n = 4.
De éstos polos los primeros cuatro ( =k 1, 2, 3 y 4) se asignan a )(sF puesto que
deben caer en la mitad izquierda del plano s. Éstos son:
© D
el d
ocum
ento
, de
los a
utor
es. D
igita
lizac
ión
real
izad
a po
r ULP
GC
. Bib
liote
ca u
nive
rsita
ria, 2
011

DISEÑO DE FILTROS PASIVOS
32
)(11)()( 22
22
ωεωω
nCMjF
+==
9239,03827,03827,09239,03827,09239,09239,03827,0
4
3
2
1
jsjsjsjs
−−=−−=+−=+−=
Por lo tanto, la función de cuarto orden de un filtro Butterworth paso bajo es:
))()()((1)(
4321 sssssssssF
−−−−=
Agrupando los términos complejos conjugados tenemos:
)18478.1)(17654.0(1)( 22 ++++
=ssss
sF
Y al multiplicarlos entre sí:
1613.2414.3613.21)( 234 ++++
=ssss
sF
El denominador de esta función se conoce como el polinomio de Butterworth. En la
Figura 3. 4 se muestra la respuesta del filtro expresado por la función )(sF .
Los primeros diez polinomios de Butterworth se pueden observar en la Tabla A.1
del Anexo.
0.2 0.4 0.6 0.8 1.0 1.2 1.4 1.6 1.8 2.0 2.2 2.4 2.6 2.80.0 3.0
0.2
0.4
0.6
0.8
1.0
0.0
1.2
freq, GHz
mag
(S(2
,1))
Figura 3. 4: Filtro Butterworth de cuarto orden realizado mediante la herramienta ADS.
3.2.2. Aproximación por el método de Chebyshev o igual rizado
Para este caso la ecuación (3.1) toma la siguiente forma:
(3.9)
© D
el d
ocum
ento
, de
los a
utor
es. D
igita
lizac
ión
real
izad
a po
r ULP
GC
. Bib
liote
ca u
nive
rsita
ria, 2
011

DISEÑO DE UN FILTRO POLIFÁSICO ACTIVO PARA UN RECEPTOR BASADO EN EL ESTÁNDAR IEEE 802.11a
33
⎪⎩
⎪⎨
⎧=)(ωnC
)coshcosh(
)coscos(
1
1
ω
ω
−
−
n
n
→
→
ω
ω
≤
≤≤
1
10
)()(2)( 11 ωωωω −+ −= nnn CCC
Donde ε sigue teniendo un valor comprendido entre cero y uno )10( ≤≤ ε y
)(ωnC es el polinomio de Chebyshev de grado n, cuyo valor vendrá dado por:
(3.10)
)(ωnC variará entre +1 y -1 en la banda de paso )10( ≤≤ ω , mientras que su valor
absoluto aumenta rápidamente con ω por encima de 1=ω . Como consecuencia de ello
)(ωM varia entre 1 y 2/12 )1( −+ ε en la banda de paso tomando un error con un rizado de
)1log(10)1log(20 22/12 εε +=+ dB. De esta forma, el valor de ε determina el error en la
banda de paso.
El polinomio de Chebyshev se puede obtener a partir de la siguiente fórmula
recursiva:
(3.11)
Con 1)(0 =ωC y ωω =)(1C .
En la Figura 3. 5 se ofrece la representación de los polinomios Chebyshev con n = 1,
2 y 3.
Figura 3. 5: Diagrama de los polinomios Chebyshev de grados n=1, 2 y 3.
Por lo tanto en dc ( 0=ω ) tendremos:
=)0(M⎪⎩
⎪⎨
⎧
+ − 2/12 )1(
1
ε para
para
n
n
par
impar
© D
el d
ocum
ento
, de
los a
utor
es. D
igita
lizac
ión
real
izad
a po
r ULP
GC
. Bib
liote
ca u
nive
rsita
ria, 2
011

DISEÑO DE FILTROS PASIVOS
34
ωε log20)1(6log20 nn +−+=
⎟⎠⎞
⎜⎝⎛ −
= πβωn
kkk 2
12·coscosh
1cosh 2
2
2
2
=+k
k
k
k
senh βω
βσ
⎟⎠⎞
⎜⎝⎛ −
= πβσn
kkk 2
12·sinsinh
Fuera de la banda de paso y para 1>>ω , )(ωM se comporta aproximadamente
como 11 )2( −− nn ωε , es decir, la atenuación para 1>>ω será:
=++= −− nnnn ωεωε log202log20log20)2log(20 11
(3.12)
Que si se compara con los ωlog20n de la función Butterworth, para 1>>ε , la
aproximación de Chebyshev tiene una ventaja de )1(6log20 −+ nε dB sobre la primera
(aproximación de Butterworth). Sin embargo, cuando 1<ε esta ventaja es menos
importante debido a que el εlog tiene valores negativos.
Por un procedimiento similar al del Butterworth, se hallan los polos de la función
del filtro Chebyshev de la siguiente forma:
kkk js ωσ ±=
Donde:
(3.13)
(3.14)
y ε
β 11 1−= senhnk para =k 1, 2, …,2n
Estos polos se sitúan sobre la elipse definida por la siguiente ecuación:
(3.15)
El semieje mayor de la elipse cae en el eje ωj , siendo su longitud kβcosh±
mientras que la longitud del semieje menor es ksenhβ± .
Los puntos de intersección entre la elipse y el eje ωj definen la frecuencia a -3dB
(frecuencia a potencia mitad), los cuales coinciden con kβcosh± . Si los comparamos con
los de Butterworth vemos que las frecuencias de éstos son siempre 1±=cω .
Dividiendo ks entre kβcosh podemos normalizar las funciones de los polos del
Chebyshev de forma que se puede obtener la frecuencia a potencia mitad en 1=cω . La
normalización de los polos se hará de la siguiente forma:
dB
© D
el d
ocum
ento
, de
los a
utor
es. D
igita
lizac
ión
real
izad
a po
r ULP
GC
. Bib
liote
ca u
nive
rsita
ria, 2
011

DISEÑO DE UN FILTRO POLIFÁSICO ACTIVO PARA UN RECEPTOR BASADO EN EL ESTÁNDAR IEEE 802.11a
35
⎟⎠⎞
⎜⎝⎛ −
= πβσn
ksenkk 212·tanh'
⎟⎠⎞
⎜⎝⎛ −
= πωn
kk 2
12cos'
kkk
kk j
ss ´´
cosh´ ωσ
β±==
Con
(3.16)
(3.17)
Comparando ks´ con los correspondientes polos de la función de Butterworth se
puede observar que tienen idénticas partes imaginarias, mientras que sus partes reales se
diferencian en un factor kβtanh . La posición relativa en el plano s de los polos de
Butterworth y de los polos normalizados de Chebyshev para n=3 se muestran en la Figura
3. 6. Para el caso de ,0=ε cuando ∞=kβ y ,1tanh =kβ los polos de Butterworth y
Chebyshev coinciden.
Los coeficientes de la función del filtro de Chebyshev, así como sus polos, se
pueden buscar fácilmente en una tabla creada con varios valores de rizado, desde 0.1,
0.5,…, hasta 3dB. Algunos de estos datos están recogidos en la Tabla A.2 del Anexo, pero
no son funciones normalizadas.
Figura 3. 6: Posición de los polos de Butterworth y de los normalizados de Chebyshev.
La respuesta en amplitud de una función paso bajo Chebyshev de tercer orden para
1 y 3dB son las siguientes:
491.0238.1988.0491.0)( 231 +++
=sss
sF dB
© D
el d
ocum
ento
, de
los a
utor
es. D
igita
lizac
ión
real
izad
a po
r ULP
GC
. Bib
liote
ca u
nive
rsita
ria, 2
011

DISEÑO DE FILTROS PASIVOS
36
⎟⎠⎞
⎜⎝⎛+
⎟⎠⎞
⎜⎝⎛
=
ωε
ωε
ω11
1
)(22
22
2
n
n
C
CM
2506.0928.0597.02506.0)( 233 +++
=sss
sF dB
En la Figura 3. 7 se muestra la comparación de ambas respuestas con la del filtro
Butterworth. En ella se observa que los filtros Chebyshev tienen una respuesta de igual
rizado en la banda de paso y cae monotónicamente fuera de ella.
Figura 3. 7: Comparación de la respuesta en magnitud del filtro Cebyshev de tercer orden paso bajo
de 1 y 3dB de rizado con el correspondiente filtro Butterworth.
3.2.3. Aproximación por el método de Chebyshev inverso Los polinomios de Chebyshev también se usan para obtener las funciones inversas
de los filtros Chebyshev, su magnitud es la siguiente:
(3.18)
Las propiedades de esta función son las complementarias a las funciones del
Chebyshev, en el sentido de que éstas presentan un máximo plano en la banda de paso y
tiene igual rizado en la banda de rechazo. Además la respuesta en fase es mejor que la del
filtro Chebyshev. En la Figura 3. 8, podemos ver la diferencia en magnitud entre los filtros
Chebyshev y Chebyshev inverso de tercer orden.
© D
el d
ocum
ento
, de
los a
utor
es. D
igita
lizac
ión
real
izad
a po
r ULP
GC
. Bib
liote
ca u
nive
rsita
ria, 2
011

DISEÑO DE UN FILTRO POLIFÁSICO ACTIVO PARA UN RECEPTOR BASADO EN EL ESTÁNDAR IEEE 802.11a
37
))(()()( 2
20
2
γβαω
++++
=sss
sKsF
Figura 3. 8: Respuesta en magnitud de Chebyshev de tercer orden (1dB) y de su correspondiente
Chebyshev inverso.
3.2.4. Aproximación por el método Elíptico o de Cauer
Los filtros examinados hasta ahora tienen todos los ceros en el infinito, sin embargo,
en algunos casos, se necesita que la banda de transición caiga más rápidamente, en otras
palabras, se necesita una atenuación muy alta cerca de la frecuencia de corte. Este requisito
obliga a usar funciones de aproximación elípticas y es, por esta razón, que a estos filtros se
les llame filtros elípticos o de Cauer.
Estos filtros presentan un rizado constante tanto en la banda de paso como en la de
rechazo. En la Figura 3. 9 se muestra la respuesta en magnitud típica de un filtro elíptico de
tercer orden cuya función es:
(3.19)
Los parámetros que determinan un filtro elíptico son:
- El error máximo en la banda de paso, dado como atenuación máxima (Amáx)
en la banda de paso
- La mínima atenuación en la banda de rechazo (Amin)
- La frecuencia a la cual comienza la banda de rechazo sω
- Frecuencia de corte de la banda de transición cω .
© D
el d
ocum
ento
, de
los a
utor
es. D
igita
lizac
ión
real
izad
a po
r ULP
GC
. Bib
liote
ca u
nive
rsita
ria, 2
011

DISEÑO DE FILTROS PASIVOS
38
)(11)( 22
2
ωεω
nRjF
+=
)1)...(1)(1())...()((
)( 22222
221
22222
221
ωωωωωωωωωωωωω
ωk
knR
−−−−−−
=
)1)...(1)(1())...()((
)( 22222
221
22222
221
ωωωωωωωωωωωω
ωk
knR
−−−−−−
=
)(11ωω n
n RR =⎟
⎠⎞
⎜⎝⎛
Figura 3. 9: Respuesta de un filtro elíptico de tercer orden.
En el caso de los filtros elípticos, la ecuación (3.1) se escribe de la siguiente
forma:
(3.20)
Donde nR , dependiendo de si n es par o impar, puede ser:
(3.21)
para n impar (n = 2k+1), o
(3.22)
para n par (n = 2k).
Podemos deducir a partir de las ecuaciones anteriores que:
(3.23)
Esto significa que el valor de )(ωnR a una frecuencia ´ω en la banda de 10 <≤ ω
es recíproco a su valor en la frecuencia ´/1 ω en la banda comprendida entre ∞<< ω1 .
Por lo tanto, si encontramos las frecuencias críticas que ofrecen un comportamiento de
rizado plano en la banda de paso, automáticamente la función tendrá el mismo
© D
el d
ocum
ento
, de
los a
utor
es. D
igita
lizac
ión
real
izad
a po
r ULP
GC
. Bib
liote
ca u
nive
rsita
ria, 2
011

DISEÑO DE UN FILTRO POLIFÁSICO ACTIVO PARA UN RECEPTOR BASADO EN EL ESTÁNDAR IEEE 802.11a
39
dBAmáx )1log(10 2ρ−−=
)()(
sDKsFn
=
nnn s
sGsD ⎟
⎠⎞
⎜⎝⎛=
1)(
comportamiento en la banda de rechazo. Dado que 2F está limitado, los polos de )(sF no
pueden caer en el eje ωj . Además, como 2)( ωjF no puede ser cero dentro de la banda de
paso, sus ceros deberían estar colocados fuera de ella. Sin embargo, los ceros de 2)( ωjF
son los polos de )(ωnR , así que todos los polos de )(ωnR deberían ser mayor que la
unidad. Es decir, que los ceros de )(ωnR deberían estar todos dentro de la banda 10 <≤ ω .
Existen tablas que dan los polos, los ceros y las frecuencias sω para varias
combinaciones de valores de Amáx y Amin. En dichas tablas el rizado de la banda de paso
viene dado normalmente en términos del coeficiente de reflexión ρ , el cual se relaciona
con Amáx según la siguiente expresión:
(3.24)
Debemos tener en cuenta que, conociendo Amáx, Amin, sω y cω , la solución del
problema de aproximación por medio de filtros elípticos es la que menor orden requiere,
con lo que este tipo de filtros se pueden fabricar con un bajo coste y, debido a ello, son los
más utilizados en la práctica.
En la Tabla A.3 del anexo se muestran algunas funciones de estos filtros para varios
valores de atenuación máxima Amáx en la banda de paso. Claramente, para la selección del
filtro elíptico apropiado, las especificaciones deben incluir los valores de Amáx, Amin,
)/( css ωω=Ω y n. Por el contrario, en los filtros de Butterworth sólo se necesitaba el
orden n, mientras que en los filtros Chebyshev era necesario especificar los valores de n y
ε (o Amáx).
3.2.5. Aproximación por el método Bessel-Thomson
Para realizar la aproximación por este método procederemos de forma similar
tomando una nueva función F(s) adecuada al nuevo filtro:
(3.25)
Donde K es una constante y )(sDn es un polinomio de orden n que está
relacionado con los polinomios de Bessel )(sGn mediante la siguiente relación:
(3.26)
© D
el d
ocum
ento
, de
los a
utor
es. D
igita
lizac
ión
real
izad
a po
r ULP
GC
. Bib
liote
ca u
nive
rsita
ria, 2
011

DISEÑO DE FILTROS PASIVOS
40
∑= −
+=⎟
⎠⎞
⎜⎝⎛ n
Kkn skkn
kns
G0 )2(!)!(
)!(1
)()()12()( 22
1 sDssDnsD nnn −− +−=
2ln)12(3 −= ndBω
Los polinomios de Bessel se definen de la siguiente manera:
(3.27)
Se puede demostrar que todos los ceros de )(sDn están situados en la parte
izquierda del plano s y que existe al menos un cero en el semieje real negativo.
La fórmula para hallar )(sDn para cualquier n junto con sus dos primeros
polinomios se muestran a continuación:
10 =D
1)(1 += ssD
(3.28)
En la Tabla 3. 1 se muestran los 5 primeros polinomios de )(sDn .
Tabla 3. 1: El polinomio )(sDn y sus primeras cinco raíces.
Las funciones )(sF conseguidas por este método se conocen como filtros de Bessel
o Thomson, siendo su retraso prácticamente ideal de acuerdo con el criterio de máximo
plano.
Su respuesta en amplitud es paso bajo con una frecuencia de corte dada por la
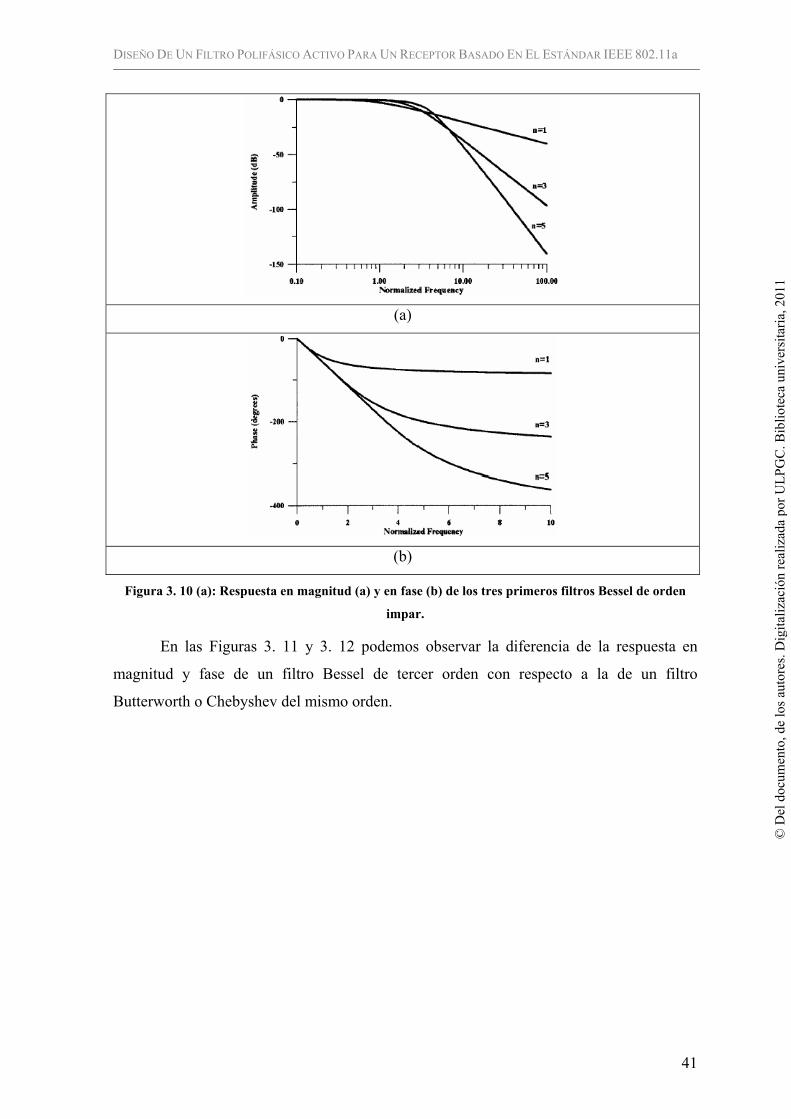
siguiente fórmula aproximada (para n ≥ 3):
(3.29)
Esto podemos verificarlo en la Figura 3. 10, en la cual se muestra la respuesta en
magnitud y fase de los tres primeros filtros Bessel de orden impar. Podemos observar que
el ancho de banda en el que la respuesta en fase es lineal aumenta a medida que aumenta n.
© D
el d
ocum
ento
, de
los a
utor
es. D
igita
lizac
ión
real
izad
a po
r ULP
GC
. Bib
liote
ca u
nive
rsita
ria, 2
011
DISEÑO DE UN FILTRO POLIFÁSICO ACTIVO PARA UN RECEPTOR BASADO EN EL ESTÁNDAR IEEE 802.11a
41
(a)
(b)
Figura 3. 10 (a): Respuesta en magnitud (a) y en fase (b) de los tres primeros filtros Bessel de orden
impar.
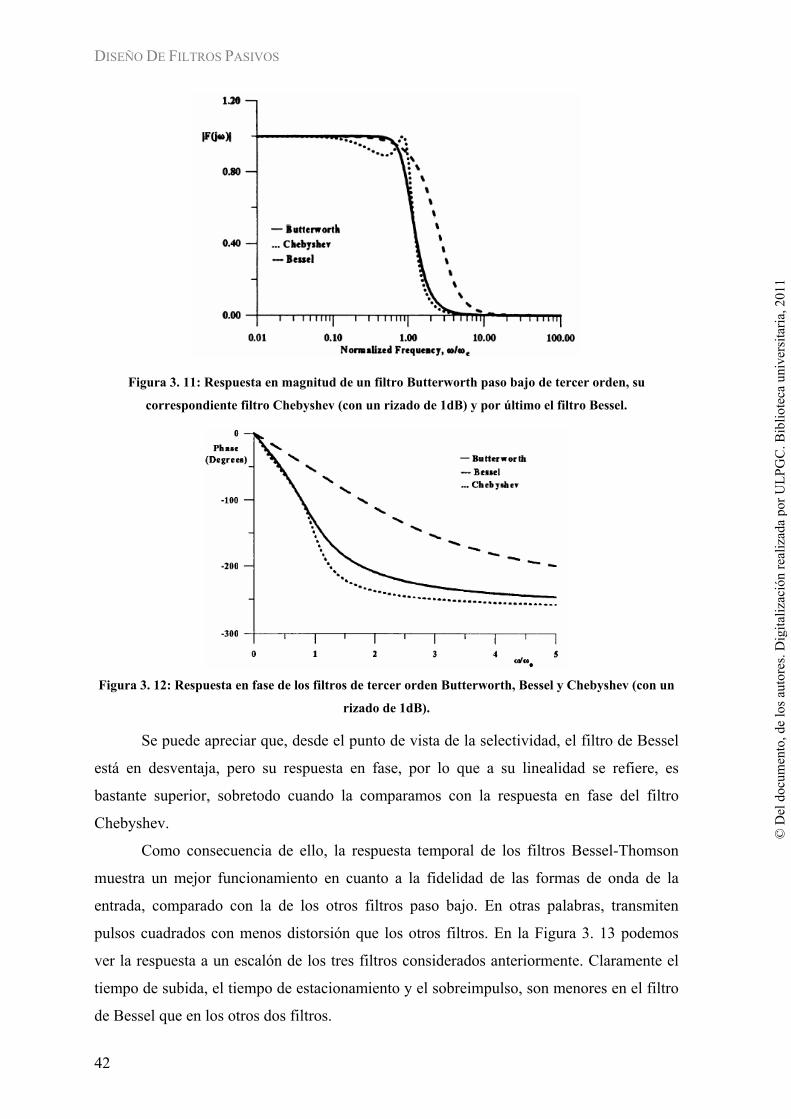
En las Figuras 3. 11 y 3. 12 podemos observar la diferencia de la respuesta en
magnitud y fase de un filtro Bessel de tercer orden con respecto a la de un filtro
Butterworth o Chebyshev del mismo orden.
© D
el d
ocum
ento
, de
los a
utor
es. D
igita
lizac
ión
real
izad
a po
r ULP
GC
. Bib
liote
ca u
nive
rsita
ria, 2
011
DISEÑO DE FILTROS PASIVOS
42
Figura 3. 11: Respuesta en magnitud de un filtro Butterworth paso bajo de tercer orden, su
correspondiente filtro Chebyshev (con un rizado de 1dB) y por último el filtro Bessel.
Figura 3. 12: Respuesta en fase de los filtros de tercer orden Butterworth, Bessel y Chebyshev (con un
rizado de 1dB).
Se puede apreciar que, desde el punto de vista de la selectividad, el filtro de Bessel
está en desventaja, pero su respuesta en fase, por lo que a su linealidad se refiere, es
bastante superior, sobretodo cuando la comparamos con la respuesta en fase del filtro
Chebyshev.
Como consecuencia de ello, la respuesta temporal de los filtros Bessel-Thomson
muestra un mejor funcionamiento en cuanto a la fidelidad de las formas de onda de la
entrada, comparado con la de los otros filtros paso bajo. En otras palabras, transmiten
pulsos cuadrados con menos distorsión que los otros filtros. En la Figura 3. 13 podemos
ver la respuesta a un escalón de los tres filtros considerados anteriormente. Claramente el
tiempo de subida, el tiempo de estacionamiento y el sobreimpulso, son menores en el filtro
de Bessel que en los otros dos filtros.
© D
el d
ocum
ento
, de
los a
utor
es. D
igita
lizac
ión
real
izad
a po
r ULP
GC
. Bib
liote
ca u
nive
rsita
ria, 2
011

DISEÑO DE UN FILTRO POLIFÁSICO ACTIVO PARA UN RECEPTOR BASADO EN EL ESTÁNDAR IEEE 802.11a
43
Figura 3. 13: Respuesta en escalón de los filtros Bessel, Butterorth y Chebyshev de tercer orden.
3.3. Aproximación del filtro paso bajo ideal mediante la herramienta
ADS Como se ha visto en los apartados anteriores, hemos conseguido, mediante distintos
métodos teóricos, una aproximación bastante acertada de los filtros paso bajo ideales, pero
hoy día, a la hora de diseñar el filtro pasivo prototipo, se usan herramientas software
pudiendo elegir entre una amplia gama de programas de ayuda al diseño. En nuestro caso
vamos a diseñar nuevos filtros basados en esas aproximaciones con la ayuda del software
de diseño ADS (Advanced Design System), concretamente el programa de diseño de filtros
que incorpora ADS denominado Filter Design Guide, (véase la Figura 3. 14).
Figura 3. 14: Ventana donde se realizan los esquemáticos y se muestra el menú de “Design Guide”.
© D
el d
ocum
ento
, de
los a
utor
es. D
igita
lizac
ión
real
izad
a po
r ULP
GC
. Bib
liote
ca u
nive
rsita
ria, 2
011

DISEÑO DE FILTROS PASIVOS
44
En los siguientes apartados explicaremos la forma de obtención del filtro paso bajo
basándonos en las distintas aproximaciones, éstas irán siguiendo el mismo orden que en el
apartado 3.2, por tanto, la primera aproximación será la de Butterworth.
3.3.1. Aproximación por el método de Butterworth
En la Figura 3. 15 podemos ver la ventana principal donde se indica las
características que debe tener el filtro. Los parámetros a definir son las frecuencias donde
debe estar la banda de paso (Fp = 1GHz) y la banda de rechazo (Fs = 2GHz), las
impedancias de entrada (Source = 50Ω) y salida (Load = 50 Ω), la amplitud en dB en las
bandas de paso (Ap = 3dB) y rechazo (As = 20dB) y, por último, el tipo de respuesta del
filtro. En este caso, queremos diseñar un filtro de Butterworth, por lo que elegiremos una
respuesta máximamente plana (Maximally flat).
Al colocarle todos estos parámetros el asistente automáticamente nos devolverá el
orden del filtro que en este caso será cuatro.
Si lo que necesitamos es un orden concreto y con los parámetros introducidos no lo
logramos, habrá que modificar los datos y definir un nuevo filtro o utilizar otros métodos,
como por ejemplo el nombrado en [10].
Figura 3. 15: Ventana del asistente para el diseño de filtros de Butterworth.
Tomando la opción de diseño (Design) la herramienta nos proporciona el circuito
que implementa al filtro, pero para trabajar más cómodamente con él lo representa
© D
el d
ocum
ento
, de
los a
utor
es. D
igita
lizac
ión
real
izad
a po
r ULP
GC
. Bib
liote
ca u
nive
rsita
ria, 2
011

DISEÑO DE UN FILTRO POLIFÁSICO ACTIVO PARA UN RECEPTOR BASADO EN EL ESTÁNDAR IEEE 802.11a
45
mediante un símbolo junto al que aparecen los parámetros introducidos en la guía de
diseño, Figura 3. 16.
DA_LCLowpassDT1_creo_butterworthDA_LCLowpassDT1
Rl=50 OhmRg=50 OhmResponseType=Maximally FlatN=4As=20 dBAp=3 dBFs=2 GHzFp=1 GHz
DT
Figura 3. 16: Representación en el ADS de un filtro paso bajo de Butterworth.
Para llegar al ladder o filtro pasivo propiamente dicho, pulsamos sobre el botón de
bajar dentro de la jerarquía de diseño . Con esto se mostrará el esquemático creado por
el ADS junto con los valores obtenidos de los componentes (ver Figura 3. 17).
PortP2Num=2
LL2
R=1e-12 OhmL=6.086982 nH
CC2C=5.878109 pF
LL1
R=1e-12 OhmL=14.695273 nH
CC1C=2.434793 pF
PortP1Num=1
Figura 3. 17: Ladder realizado por el ADS a partir de los datos propuestos en el asistente.
Para observar el comportamiento del filtro podemos hacer dos cosas, o bien simular
dentro del asistente de diseño (Simulation Assistant) donde obtendremos la respuesta en
frecuencia de varios parámetros del filtro junto con otros exámenes que el software realiza
automáticamente, o bien, cerrar el asistente y colocar el circuito como se muestra en la
Figura 3. 18 y simular obteniendo los parámetros S. Nosotros hemos optado por la segunda
opción, ya que simularemos sólo lo que nos interesa, en nuestro caso la ganancia del filtro
(S2,1).
© D
el d
ocum
ento
, de
los a
utor
es. D
igita
lizac
ión
real
izad
a po
r ULP
GC
. Bib
liote
ca u
nive
rsita
ria, 2
011

DISEÑO DE FILTROS PASIVOS
46
S_ParamSP1
Step=10.0 MHzStop=3.0 GHzStart=0 GHz
S-PARAMETERSTermTerm1
Z=50 OhmNum=1
TermTerm2
Z=50 OhmNum=2DA_LCLowpassDT1_creo_butterworth
DA_LCLowpassDT1
Rl=50 OhmRg=50 OhmResponseType=Maximally FlatN=4As=20 dBAp=3 dBFs=2 GHzFp=1 GHz
DT
Figura 3. 18: Esquema del filtro de Butterworth para la simulación en parámetros S.
La respuesta en magnitud de la ganancia de un filtro Butterworth de tercer orden
viene representada en la Figura 3. 19.
0.2 0.4 0.6 0.8 1.0 1.2 1.4 1.6 1.8 2.0 2.2 2.4 2.6 2.80.0 3.0
0.2
0.4
0.6
0.8
1.0
0.0
1.2
freq, GHz
mag
(S(2
,1))
Figura 3. 19: Respuesta de un filtro de Butterworth.
3.3.2. Aproximación por el método de Chebyshev
Para el diseño del filtro de Chebyshev seguiremos los mismos pasos que en el caso
anterior. En la Figura 3. 20 se muestra el asistente de la guía de diseño de filtros. En ella
podemos apreciar que lo único que se ha cambiado con respecto a la aproximación por
Butterworth es la respuesta elegida que, en este caso, se corresponde con la de un filtro de
Chebyshev, devolviendo el asistente un filtro de orden 3.
Eligiendo la opción Design, se crea el nuevo filtro paso bajo con las características
propias del Chebyshev (Figura 3. 21) y, de la misma forma que para el filtro de
Butterworth, al bajar en la jerarquía, podemos observar el ladder generado por el ADS con
los nuevos valores de los elementos pasivos (Figura 3. 22).
© D
el d
ocum
ento
, de
los a
utor
es. D
igita
lizac
ión
real
izad
a po
r ULP
GC
. Bib
liote
ca u
nive
rsita
ria, 2
011

DISEÑO DE UN FILTRO POLIFÁSICO ACTIVO PARA UN RECEPTOR BASADO EN EL ESTÁNDAR IEEE 802.11a
47
Figura 3. 20: Ventana del asistente para el diseño de filtros de Chebyshev.
DA_LCLowpassDT1_untitled2DA_LCLowpassDT1
Rl=50 OhmRg=50 OhmResponseType=ChebyshevN=3As=20 dBAp=3 dBFs=2 GHzFp=1 GHz
DT
Figura 3. 21: Filtro de Chebyshev.
PortP2Num=2
CC2C=10.659979 pF
LL1
R=1e-12 OhmL=5.66327 nH
CC1C=10.659979 pF
PortP1Num=1
Figura 3. 22: Ladder realizado por el ADS a partir de los datos propuestos en el asistente.
El siguiente paso será visualizar la ganancia. Una forma sencilla es verla mediante
los parámetros S. Para ello conectaremos el filtro tal y como se muestra en la Figura 3. 23.
© D
el d
ocum
ento
, de
los a
utor
es. D
igita
lizac
ión
real
izad
a po
r ULP
GC
. Bib
liote
ca u
nive
rsita
ria, 2
011

DISEÑO DE FILTROS PASIVOS
48
Los terminales usados a la entrada y salida del filtro son necesarios para definir la
impedancia y poder llevar a cabo la simulación en corriente alterna de dichos parámetros.
En la Figura 3. 24 se muestra la magnitud del parámetro S2,1 representando así la
respuesta en frecuencia del filtro Chebyshev.
S_ParamSP1
Step=10.0 MHzStop=3.0 GHzStart=0 GHz
S-PARAMETERSTermTerm1
Z=50 OhmNum=1
TermTerm2
Z=50 OhmNum=2DA_LCLowpassDT2_untitled2
DA_LCLowpassDT2
Rl=50 OhmRg=50 OhmResponseType=ChebyshevN=3As=20 dBAp=3 dBFs=2 GHzFp=1 GHz
DT
Figura 3. 23: Esquema del filtro de Chebyshev para la simulación en parámetros S.
0.5 1.0 1.5 2.0 2.50.0 3.0
0.2
0.4
0.6
0.8
1.0
0.0
1.2
freq, GHz
mag
(S(2
,1))
Figura 3. 24: Respuesta de un filtro de Chebyshev.
3.3.3. Aproximación por el método de Chebyshev inverso
Para diseñar nuevamente el filtro partimos de la guía de diseño (Figura 3. 25) que,
como puede apreciarse no se ha cambiado ningún parámetro salvo el tipo de respuesta,
Chebyshev Inverso (Inverse Chebyshev). Por otro lado, el asistente nos devuelve un filtro
de orden 3.
Seguidamente, tras pulsar en Design, obtenemos el esquemático del circuito (Figura
3. 26) y, bajando en la jerarquía, los nuevos valores de los componentes pasivos (Figura 3.
27).
© D
el d
ocum
ento
, de
los a
utor
es. D
igita
lizac
ión
real
izad
a po
r ULP
GC
. Bib
liote
ca u
nive
rsita
ria, 2
011

DISEÑO DE UN FILTRO POLIFÁSICO ACTIVO PARA UN RECEPTOR BASADO EN EL ESTÁNDAR IEEE 802.11a
49
Figura 3. 25: Ventana del asistente para el diseño de filtros de Chebyshev Inverso.
DA_LCLowpassDT3_untitled2DA_LCLowpassDT3
Rl=50 OhmRg=50 OhmResponseType=Inverse ChebyshevN=3As=20 dBAp=3 dBFs=2 GHzFp=1 GHz
DT
Figura 3. 26: Filtro de Chebyshev Inverso.
PortP2Num=2
CC3C=2.42284 pF
CC2C=661.77381 fF
LL1
R=1e-12 OhmL=12.1142 nH
CC1C=2.42284 pF
PortP1Num=1
Figura 3. 27: Ladder propuesto por el ADS a partir de los datos colocados en el asistente.
© D
el d
ocum
ento
, de
los a
utor
es. D
igita
lizac
ión
real
izad
a po
r ULP
GC
. Bib
liote
ca u
nive
rsita
ria, 2
011

DISEÑO DE FILTROS PASIVOS
50
De nuevo, para ver la respuesta en frecuencia de este circuito (Figura 3. 29)
haremos una simulación mediante parámetros S, de forma idéntica al resto de los filtros ya
vistos, la cual se muestra en la Figura 3. 28.
DA_LCLowpassDT3_untitled2DA_LCLowpassDT3
Rl=50 OhmRg=50 OhmResponseType=Inverse ChebyshevN=3As=20 dBAp=3 dBFs=2 GHzFp=1 GHz
DT
S_ParamSP1
Step=10.0 MHzStop=3.0 GHzStart=0 GHz
S-PARAMETERSTermTerm1
Z=50 OhmNum=1
TermTerm2
Z=50 OhmNum=2
Figura 3. 28: Esquema del filtro de Chebyshev Inverso para la simulación en parámetros S.
0.5 1.0 1.5 2.0 2.50.0 3.0
0.2
0.4
0.6
0.8
1.0
0.0
1.2
freq, GHz
mag
(S(2
,1))
Figura 3. 29: Respuesta de un filtro de Chebyshev Inverso.
3.3.4. Aproximación por el método Elíptico o de Cauer
Continuando con el mismo orden que el desarrollo teórico, la siguiente
aproximación a realizar es la Elíptica o de Cauer.
Como en todas las aproximaciones de filtros creadas por el ADS, lo primero que
debemos consultar es la guía de diseño. En ella, nos encontramos con los huecos
designados a colocar los parámetros característicos de los filtros, como estos parámetros
van a tener el mismo valor que los de los filtros Chebyshev y Butterworth, sólo tenemos
que modificar el tipo de respuesta a elíptica.
Una vez terminada la disposición de los parámetros, el asistente nos devuelve 3
como orden del filtro, (véase la Figura 3. 30).
© D
el d
ocum
ento
, de
los a
utor
es. D
igita
lizac
ión
real
izad
a po
r ULP
GC
. Bib
liote
ca u
nive
rsita
ria, 2
011

DISEÑO DE UN FILTRO POLIFÁSICO ACTIVO PARA UN RECEPTOR BASADO EN EL ESTÁNDAR IEEE 802.11a
51
Nos queda confirmar la creación del nuevo filtro, para ello nos ayudamos de la
opción Design, a partir de la cual tenemos el símbolo del filtro (Figura 3. 31) y, dentro de
él, un nuevo ladder, (Figura 3. 32).
Figura 3. 30: Ventana del asistente para el diseño de filtros elípticos o de Cauer.
DA_LCLowpassDT1_untitled2DA_LCLowpassDT4
Rl=50 OhmRg=50 OhmResponseType=EllipticN=3As=20 dBAp=3 dBFs=2 GHzFp=1 GHz
DT
Figura 3. 31: Filtro Elíptico o de Cauer.
PortP2Num=2
CC3C=7.531781 pF
CC2C=5.686116 pF
LL1
R=1e-12 OhmL=2.875735 nH
CC1C=7.531781 pF
PortP1Num=1
Figura 3. 32: Ladder propuesto por el ADS a partir de los datos propuestos en el asistente.
© D
el d
ocum
ento
, de
los a
utor
es. D
igita
lizac
ión
real
izad
a po
r ULP
GC
. Bib
liote
ca u
nive
rsita
ria, 2
011

DISEÑO DE FILTROS PASIVOS
52
Como ya se ha realizado en varias ocasiones, la simulación se hará por parámetros
S, pudiendo visualizarse el circuito utilizado en la Figura 3. 33 y obteniendo como
resultado la gráfica de la Figura 3. 34.
S_ParamSP1
Step=10.0 MHzStop=3.0 GHzStart=0 GHz
S-PARAMETERSTermTerm2
Z=50 OhmNum=2
TermTerm1
Z=50 OhmNum=1 DA_LCLowpassDT1_untitled2
DA_LCLowpassDT4
Rl=50 OhmRg=50 OhmResponseType=EllipticN=3As=20 dBAp=3 dBFs=2 GHzFp=1 GHz
DT
Figura 3. 33: Esquema del filtro Elíptico o de Cauer para la simulación en parámetros S.
0.5 1.0 1.5 2.0 2.50.0 3.0
0.2
0.4
0.6
0.8
1.0
0.0
1.2
freq, GHz
mag
(S(2
,1))
Figura 3. 34: Respuesta de un filtro Elíptico o de Cauer.
3.3.5. Aproximación por el método de Bessel-Thomson
El último filtro que diseñaremos en este capítulo será el que se basa en la
aproximación de Bessel-Thomson. El primer paso será abrir la guía de diseño de filtros que
nos ofrece el ADS, en ella debemos colocar los parámetros designados por igual para todos
los filtros, cambiando el tipo de respuesta a Bessel-Thomson.
Como se ha visto en anteriores apartados, el asistente es quien nos asigna el orden
del filtro, pero, sólo en este tipo de respuesta, el ADS admite el orden del filtro como un
parámetro más. Para ir acorde con el resto de los circuitos ya creados por el mismo método,
optaremos porque el filtro sea de tercer orden (véase la Figura 3. 35).
© D
el d
ocum
ento
, de
los a
utor
es. D
igita
lizac
ión
real
izad
a po
r ULP
GC
. Bib
liote
ca u
nive
rsita
ria, 2
011
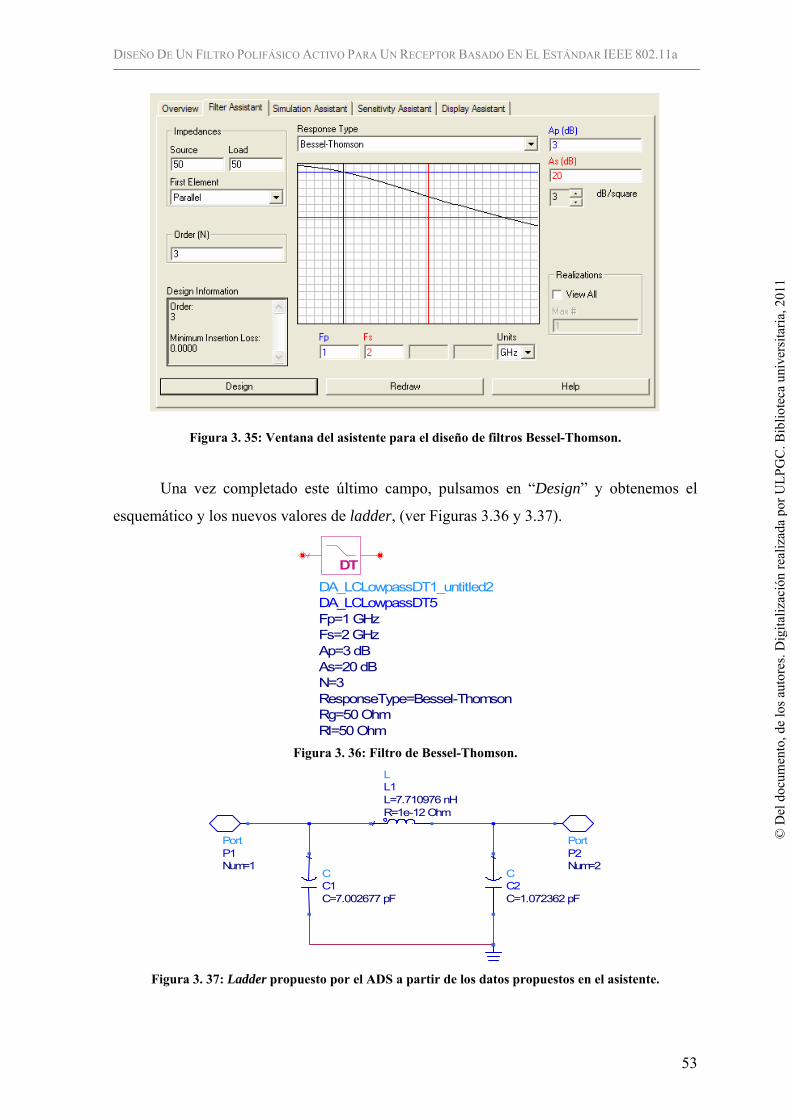
DISEÑO DE UN FILTRO POLIFÁSICO ACTIVO PARA UN RECEPTOR BASADO EN EL ESTÁNDAR IEEE 802.11a
53
Figura 3. 35: Ventana del asistente para el diseño de filtros Bessel-Thomson.
Una vez completado este último campo, pulsamos en “Design” y obtenemos el
esquemático y los nuevos valores de ladder, (ver Figuras 3.36 y 3.37).
DA_LCLowpassDT1_untitled2DA_LCLowpassDT5
Rl=50 OhmRg=50 OhmResponseType=Bessel-ThomsonN=3As=20 dBAp=3 dBFs=2 GHzFp=1 GHz
DT
Figura 3. 36: Filtro de Bessel-Thomson.
PortP2Num=2
CC2C=1.072362 pF
LL1
R=1e-12 OhmL=7.710976 nH
CC1C=7.002677 pF
PortP1Num=1
Figura 3. 37: Ladder propuesto por el ADS a partir de los datos propuestos en el asistente.
© D
el d
ocum
ento
, de
los a
utor
es. D
igita
lizac
ión
real
izad
a po
r ULP
GC
. Bib
liote
ca u
nive
rsita
ria, 2
011

DISEÑO DE FILTROS PASIVOS
54
La simulación es realizada mediante los parámetros S de forma idéntica al resto de
los filtros ya creados, (véase Figura 3. 38). La curva de la ganancia viene representada en
la Figura 3. 39.
TermTerm2
Z=50 OhmNum=2
TermTerm1
Z=50 OhmNum=1 S_Param
SP1
Step=10.0 MHzStop=3.0 GHzStart=0 GHz
S-PARAMETERS
DA_LCLowpassDT1_untitled2DA_LCLowpassDT5
Rl=50 OhmRg=50 OhmResponseType=Bessel-ThomsonN=3As=20 dBAp=3 dBFs=2 GHzFp=1 GHz
DT
Figura 3. 38: Esquema del filtro de Bessel-Thomson para la simulación en parámetros S.
0.5 1.0 1.5 2.0 2.50.0 3.0
0.2
0.4
0.6
0.8
1.0
0.0
1.2
freq, GHz
mag
(S(2
,1))
Figura 3. 39: Respuesta de un filtro de Bessel-Thomson.
3.4. Comparación entre las distintas aproximaciones
En este apartado vamos a incluir todas las ganancias de los distintos filtros en una
sola gráfica, la representaremos en magnitud (Figura 3. 40) y en fase (Figura 3. 41), y así
podremos apreciar claramente sus diferencias.
Los filtros vendrán dados por distintos colores que coincidirán en ambas gráficas.
De este modo tenemos que el filtro de Butterworth vendrá representado por el color rojo, el
de Chebyshev por el azul, el Chebyshev Inverso por el color negro, el filtro Elíptico será de
color verde y el de Bessel-Thomson vendrá dibujado por la línea rosa.
© D
el d
ocum
ento
, de
los a
utor
es. D
igita
lizac
ión
real
izad
a po
r ULP
GC
. Bib
liote
ca u
nive
rsita
ria, 2
011

DISEÑO DE UN FILTRO POLIFÁSICO ACTIVO PARA UN RECEPTOR BASADO EN EL ESTÁNDAR IEEE 802.11a
55
0.5 1.0 1.5 2.0 2.50.0 3.0
0.2
0.4
0.6
0.8
1.0
0.0
1.2
freq, GHz
mag
(S(2
,1))
mag
(S(4
,3))
mag
(S(6
,5))
mag
(S(8
,7))
mag(S
(10,9
))
Figura 3. 40: Representación de la ganancia en magnitud de los filtros de Butterworth, Chebyshev,
Chebyshev Inverso, Elíptico y de Bessel-Thomson.
0.5 1.0 1.5 2.0 2.50.0 3.0
-100
0
100
-200
200
freq, GHz
phase
(S(2
,1))
phase
(S(4
,3))
phase
(S(6
,5))
phase
(S(8
,7))
phase
(S(1
0,9
))
Figura 3. 41: Representación de la ganancia en fase de los filtros de Butterworth, Chebyshev,
Chebyshev Inverso, Elíptico y de Bessel-Thomson.
3.5. Resumen Existen varias aproximaciones para crear un filtro. De ellas, cinco son las más
utilizadas y, por ello, son objeto de nuestro estudio. En este capítulo hemos estudiado sus
características más importantes prestando especial atención al estudio de sus funciones de
transferencia. Se ha comprobado que el diseño atendiendo al cálculo de los polos y los
ceros de dichas funciones es una tarea repetitiva y, por ello, puede ser reemplazado por
herramientas software, como ADS, que automatizan dicho trabajo.
Una vez diseñado el filtro, el problema con el que nos encontramos es que no todos
los valores de los elementos pasivos que lo forman están disponibles. El problema se
© D
el d
ocum
ento
, de
los a
utor
es. D
igita
lizac
ión
real
izad
a po
r ULP
GC
. Bib
liote
ca u
nive
rsita
ria, 2
011

DISEÑO DE FILTROS PASIVOS
56
agrava si lo que queremos es diseñar un filtro integrado en el que la disponibilidad de
espacio de dichos componentes es aún más reducida. La solución que planteamos es
sustituir los elementos pasivos por otros generados a partir de circuitos activos como
pueden ser los transconductores (OTAs).
En el siguiente capítulo estudiaremos como conectando convenientemente varios
OTAs y modificando su transconductancia podemos simular un componente pasivo
determinado.
© D
el d
ocum
ento
, de
los a
utor
es. D
igita
lizac
ión
real
izad
a po
r ULP
GC
. Bib
liote
ca u
nive
rsita
ria, 2
011

57
Capítulo 4
Filtros Gm-C
Como se comentó en el capítulo 2, los filtros gm-C están compuestos por
amplificadores de transconductancia y condensadores. En este capítulo, se va presentar los
conceptos básicos referidos a los filtros gm-C. El lector interesado puede encontrar una
descripción más detallada en [2] y [4].
4.1. OTA básico Mientras que los amplificadores operacionales son fuentes de tensión controladas
por tensión, los OTAs son fuentes de corriente controladas por tensión. De hecho un
amplificador de transconductancia ideal no es más que una fuente de corriente controlada
por tensión de ancho de banda infinita, con una impedancia de entrada y de salida infinitas.
© D
el d
ocum
ento
, de
los a
utor
es. D
igita
lizac
ión
real
izad
a po
r ULP
GC
. Bib
liote
ca u
nive
rsita
ria, 2
011

FILTROS GM-C
58
El símbolo usado para los OTA se muestra en la Figura 4. 1 junto con el circuito
equivalente en pequeña señal.
+
--gm
CiCoro
vi
v2
v1 gmvi
io
viio
io=gmvi
(a)
+
- +gm
CiCoro
vi
v2
v1 gmvi
io
viio
io=gmviio
-
(b)
Figura 4. 1: Símbolos de los OTA asimétrico (a) y diferencial (b) con sus circuitos equivalentes en
pequeña señal.
4.2. Circuitos básicos con OTAs No es nuestra intención hacer una descripción detallada de todos los circuitos
basados en OTAs, por ello dejaremos esta discusión a las referencias antes mencionadas,
[2] y [4]. Con el único ánimo de informar, en las Figuras 4.2, 4.3 y 4.4 se muestran algunos
circuitos básicos: resistencias simuladas, integradores y giradores. Las expresiones y
esquemas que describen a estos circuitos se pueden ver a continuación:
Para la resistencia:
gm1
VgmV
IVR =
⋅==
© D
el d
ocum
ento
, de
los a
utor
es. D
igita
lizac
ión
real
izad
a po
r ULP
GC
. Bib
liote
ca u
nive
rsita
ria, 2
011

DISEÑO DE UN FILTRO POLIFÁSICO ACTIVO PARA UN RECEPTOR BASADO EN EL ESTÁNDAR IEEE 802.11a
59
+
--gm
io
ii
+ -
-gm
+
+
- +gm -
(a) (b) (c)
Figura 4. 2: Resistencias simuladas con OTA, conectada a tierra (a), flotante (b) y negativa y
diferencial (c).
Para el integrador:
+
--gmv1
v2
C
+
--gm
v1
v2
C
+
--gm
(a) (b)
+
-gmv1 v2
2C
+
-gm
2C
+
-gmv1 v2
+
-gmC
(c) (d)
Figura 4. 3: Integradores simulados con OTAs, asimétrico(a), asimétrico con carga resistiva (filtro de
primer orden) (b), diferencial con carga resistiva con dos condensadores puestos a tierra (c) y
diferencial con carga resistiva con condensador flotante (d).
Para el girador:
Csgm
ViVo
⋅=
22 gmCL
gmCs
IVZ =→
⋅==
© D
el d
ocum
ento
, de
los a
utor
es. D
igita
lizac
ión
real
izad
a po
r ULP
GC
. Bib
liote
ca u
nive
rsita
ria, 2
011
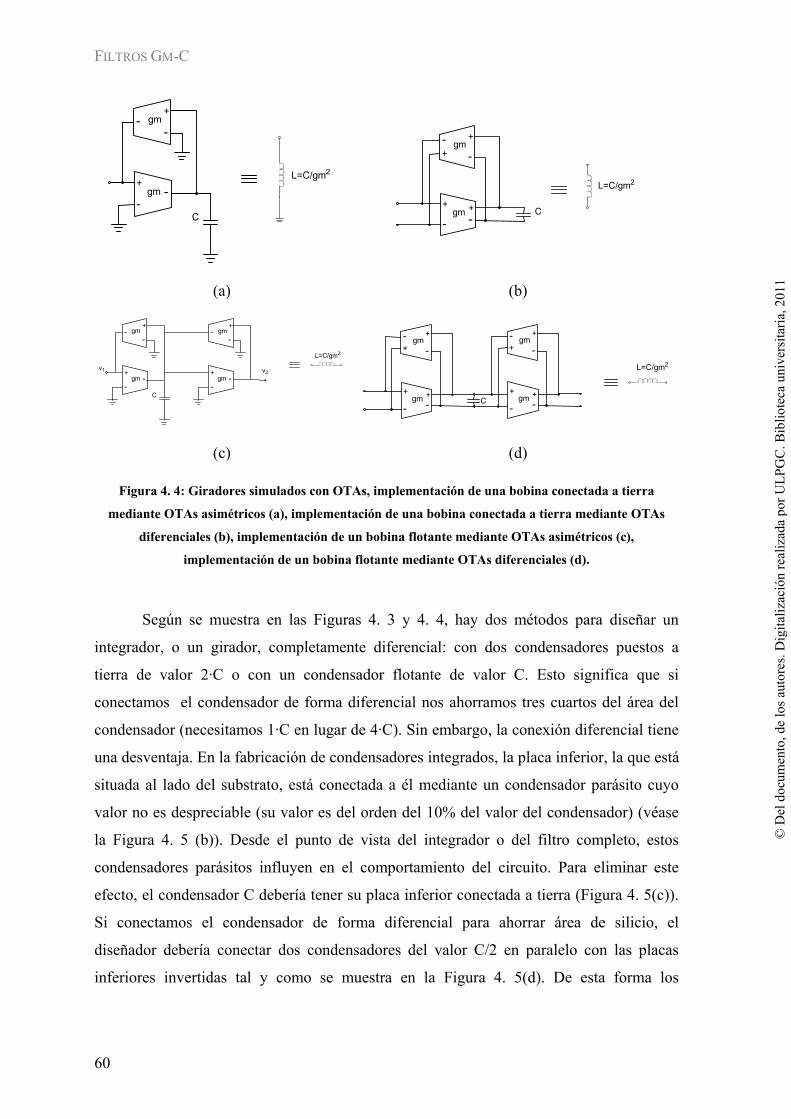
FILTROS GM-C
60
+
--gm
C
+
-- gm
L=C/gm2
+
- -gm C
+
-- gm
L=C/gm2
+
+
(a) (b)
+
--gm
v1 v2
C
+
-- gm
L=C/gm2
+
--gm
+
-- gm
+
- -gm C
+
-- gm
L=C/gm2
+
+ +
- -gm
+
-- gm+
+
(c) (d)
Figura 4. 4: Giradores simulados con OTAs, implementación de una bobina conectada a tierra
mediante OTAs asimétricos (a), implementación de una bobina conectada a tierra mediante OTAs
diferenciales (b), implementación de un bobina flotante mediante OTAs asimétricos (c),
implementación de un bobina flotante mediante OTAs diferenciales (d).
Según se muestra en las Figuras 4. 3 y 4. 4, hay dos métodos para diseñar un
integrador, o un girador, completamente diferencial: con dos condensadores puestos a
tierra de valor 2·C o con un condensador flotante de valor C. Esto significa que si
conectamos el condensador de forma diferencial nos ahorramos tres cuartos del área del
condensador (necesitamos 1·C en lugar de 4·C). Sin embargo, la conexión diferencial tiene
una desventaja. En la fabricación de condensadores integrados, la placa inferior, la que está
situada al lado del substrato, está conectada a él mediante un condensador parásito cuyo
valor no es despreciable (su valor es del orden del 10% del valor del condensador) (véase
la Figura 4. 5 (b)). Desde el punto de vista del integrador o del filtro completo, estos
condensadores parásitos influyen en el comportamiento del circuito. Para eliminar este
efecto, el condensador C debería tener su placa inferior conectada a tierra (Figura 4. 5(c)).
Si conectamos el condensador de forma diferencial para ahorrar área de silicio, el
diseñador debería conectar dos condensadores del valor C/2 en paralelo con las placas
inferiores invertidas tal y como se muestra en la Figura 4. 5(d). De esta forma los
© D
el d
ocum
ento
, de
los a
utor
es. D
igita
lizac
ión
real
izad
a po
r ULP
GC
. Bib
liote
ca u
nive
rsita
ria, 2
011

DISEÑO DE UN FILTRO POLIFÁSICO ACTIVO PARA UN RECEPTOR BASADO EN EL ESTÁNDAR IEEE 802.11a
61
condensadores Cg/2 todavía están presentes pero se mantiene la simetría y el equilibrio del
circuito.
(a) (b) (c) (d)
Figura 4. 5: Conversión de dos condensadores en uno diferencial (a), representación del condensador
parásito (b), forma correcta de conectar el condensador parásito en un condensador conectado a tierra
(c) y conexión recomendada de un condensador flotante de valor C (d).
4.3. Filtros de primer y segundo orden El filtro gm-C de primer orden universal se muestra en la Figura 4. 6. Este circuito
queda descrito por la siguiente función de transferencia:
(a) (b)
Figura 4. 6: Filtro gm-C de primer orden universal asimétrico (a) y diferencial (b).
2
1
1
2
gmCsgmCsa
VV
+⋅+⋅⋅
=
gm1 gm2
gm1 gm2 ©
Del
doc
umen
to, d
e lo
s aut
ores
. Dig
italiz
ació
n re
aliz
ada
por U
LPG
C. B
iblio
teca
uni
vers
itaria
, 201
1

FILTROS GM-C
62
Las características fundamentales son las siguientes:
• A partir de este circuito podemos obtener un filtro paso alto de primer orden
si hacemos gm1 igual a cero, para ello quitaremos del circuito el
transconductor correspondiente.
• La transconductancia gm1 se puede hacer negativa si quitamos los cables
cruzados y conectamos la salida inversora de gm1 con los condensadores
superiores y la salida no inversora con los inferiores.
• El valor de “a” puede variar entre 0 ≤ a ≤1, permitiendo ajustar el
coeficiente de “s” en el numerador. Esto permite que los ceros de la función
de transferencia puedan estar en cualquier lado sobre el eje real.
• Para hacer un integrador ideal basta con eliminar la transconductancia gm2.
• Si hacemos gm1 = -gm2 y a = 1 obtendremos un filtro paso todo de primer
orden que se puede utilizar para hacer correcciones de fase.
• Intercambiando las conexiones + y - de los condensadores 2·a·C de la
entrada de gm1 podemos cambiar el signo de la función de transferencia con
lo que el circuito se convierte en inversor.
En la Figura 4. 7 se muestra el filtro gm-C de segundo orden universal. Se observa
que los dos condensadores 2·(1-a)·C y los dos condensadores 2·(1-b)·C en la
implementación diferencial se pueden sustituir en la implementación asimétrica por un
condensador de valor (1-a)·C y (1-b)·C, respectivamente. Lo mismo ocurre con los
condensadores 2·a·C y 2·b·C. La función de transferencia que describe el comportamiento
de este circuito viene dada por:
donde
200
2
2z
221
2
1
2
21
2
i
11
i
3
2i
4
1i
42
i
o
ω/Qωssωsβsα
CCgm
Cgmss
CCgm
VV
gmgm
VV
Cgma
VV
Cgmbs
VV
bs
VV
T(s)
+⋅++⋅+⋅
=
=
⋅++
⋅⋅⎟⎟
⎠
⎞⎜⎜⎝
⎛⋅+⎟⎟
⎠
⎞⎜⎜⎝
⎛⋅⋅−⋅⋅⋅+⎟⎟
⎠
⎞⎜⎜⎝
⎛⋅⋅
==
i
11z
2
1
210 Vgm
Vgmω;CCQ;
CCgmω
⋅⋅
==⋅
=
© D
el d
ocum
ento
, de
los a
utor
es. D
igita
lizac
ión
real
izad
a po
r ULP
GC
. Bib
liote
ca u
nive
rsita
ria, 2
011
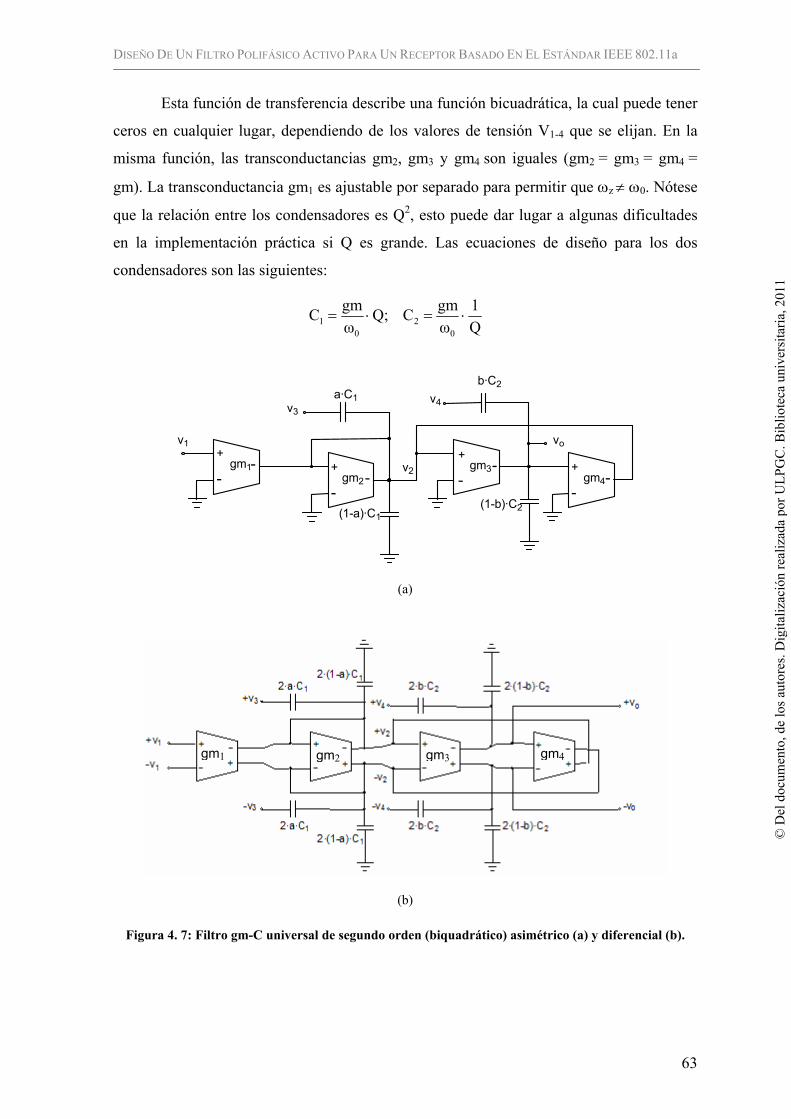
DISEÑO DE UN FILTRO POLIFÁSICO ACTIVO PARA UN RECEPTOR BASADO EN EL ESTÁNDAR IEEE 802.11a
63
Esta función de transferencia describe una función bicuadrática, la cual puede tener
ceros en cualquier lugar, dependiendo de los valores de tensión V1-4 que se elijan. En la
misma función, las transconductancias gm2, gm3 y gm4 son iguales (gm2 = gm3 = gm4 =
gm). La transconductancia gm1 es ajustable por separado para permitir que ωz ≠ ω0. Nótese
que la relación entre los condensadores es Q2, esto puede dar lugar a algunas dificultades
en la implementación práctica si Q es grande. Las ecuaciones de diseño para los dos
condensadores son las siguientes:
+
--gm1
v1
v2
(1-a)·C1
+
--gm2
a·C1
+
--gm3
v4
(1-b)·C2
+
--gm4
b·C2
v3
vo
(a)
(b)
Figura 4. 7: Filtro gm-C universal de segundo orden (biquadrático) asimétrico (a) y diferencial (b).
Q1
ωgmCQ;
ωgmC
02
01 ⋅=⋅=
gm1 gm2 gm3 gm4
© D
el d
ocum
ento
, de
los a
utor
es. D
igita
lizac
ión
real
izad
a po
r ULP
GC
. Bib
liote
ca u
nive
rsita
ria, 2
011

FILTROS GM-C
64
La Tabla 3. 1 nos ayuda, de forma sencilla, a construir cualquier filtro bicuadrático.
Tabla 3. 1: Guía para el diseño de un filtro bicuadrático.
FiltroTipo(a) V1 V3 V4 a b gm1 H(0) H(∞)
LP Vi 0 0 0 0 H(0)·gm gm1/gm 0
BP(b) 0 Vi 0 HM/Q2 0 0 0 0
HP 0 Vi Vi a a·Q2 0 0 b=a·Q2
BR(c) Vi Vi Vi a a·Q2 H(0)·gm gm1/gm b=a·Q2
AP Vi Vi Vi 2Q2 1 Gm 1 b=1
(a) V3 y/o V4 deben ser iguales a –Vi para una cierta libertad adicional en la selección de los signos de los
coeficientes. (b) HM es la ganancia a mitad de banda. (c) Si gm1/gm=b se obtiene un filtro de rechazo de banda (notch), si gm1/gm>b uno paso-bajo, y si
gm1/gm<b uno paso alto de rechazo de banda.
Nota: LP = Low Pass; BP = Band Pass; HP = High Pass; BR = Band Rejection; AP = All Pass.
4.4. Filtros de orden superior Existen dos métodos para diseñar los filtros gm-C de orden superior:
• Conectar varias estructuras de primer y segundo orden en cascada (Figura 4.
8 (a)).
• Simulación de filtros pasivos en escalera (ladder) (Figura 4. 8 (b)).
La segunda técnica consiste en diseñar primero el filtro pasivo que cumple con las
especificaciones requeridas y luego sustituir las bobinas por giradores. Este método suele
ser el más sencillo, puesto que diseñar un filtro pasivo es relativamente fácil gracias a la
disponibilidad existente de programas de ayuda al diseño de los mismos [9], [10], [11] ó
[12]. Además, los filtros desarrollados siguiendo este método son más robustos frente a las
tolerancias de los componentes con los que está diseñado [2].
1er orden 2oorden 2oorden
(a)
© D
el d
ocum
ento
, de
los a
utor
es. D
igita
lizac
ión
real
izad
a po
r ULP
GC
. Bib
liote
ca u
nive
rsita
ria, 2
011

DISEÑO DE UN FILTRO POLIFÁSICO ACTIVO PARA UN RECEPTOR BASADO EN EL ESTÁNDAR IEEE 802.11a
65
C1
L1girador
C2
L2girador
C3
(b)
Figura 4. 8: Diseño de un filtro de orden cinco conectando en cascada una etapa de primer orden y dos etapas de segundo orden (a), y simulando un circuito pasivo en escalera (b).
4.5. Implementación del filtro gm-C Lo primero que debemos buscar para la realización de cualquier filtro son sus
especificaciones de diseño, en este caso, nuestro objetivo es realizar el filtro polifásico
paso banda cuyas características son:
• Ancho de banda de 20MHz
• Frecuencia central a 20MHz
• Rechazo de -30dB a 40MHz
Pero para llegar hasta él tenemos que dar varios pasos previos, el primero es la
realización del filtro paso bajo pasivo prototipo y, una vez terminado, pasamos a su
transformación en filtro activo tipo gm-C.
Como un filtro paso bajo es igual que uno paso banda centrado en el origen, es
decir, como un filtro paso bajo es la mitad de uno paso banda, utilizaremos las siguientes
características, idénticas a las del polifásico pero a la mitad de frecuencia:
• Ancho de banda de 10MHz
• Rechazo de -30dB a 20MHz
Como se comentó en el capítulo anterior, a la hora de diseñar el filtro pasivo
prototipo existe una amplia disponibilidad de programas de ayuda al diseño y, como
igualmente se comentó, hemos utilizado el programa de diseño de filtros que incorpora
ADS, Filter Design Guide. En la Figura 4. 9 podemos ver la ventana principal donde se le
indica las características que debe tener el filtro. Al igual que en el capítulo anterior,
colocaremos los datos necesarios para satisfacer las especificaciones arriba expuestas, tales
como definir las frecuencias donde debe estar la banda de paso y la banda de rechazo
(Fp=10MHz y Fs=20MHz), las impedancias de entrada y salida (Rsource = Rload = 12KΩ,
© D
el d
ocum
ento
, de
los a
utor
es. D
igita
lizac
ión
real
izad
a po
r ULP
GC
. Bib
liote
ca u
nive
rsita
ria, 2
011

FILTROS GM-C
66
esta elección se explicará en el capítulo 7), la amplitud en dB de las bandas de paso y
rechazo (Ap = 3dB y As = 30dB) y, por último, el tipo de respuesta del filtro (Butterworth
o Maximally Flat).
Figura 4. 9: Guía de diseños de filtros en ADS.
Junto con el orden del filtro (N=5) y su respuesta en frecuencia, la herramienta nos
proporciona el circuito que lo implementa (ver Figura 4. 10).
PortP2Num=2
CC3C=819.303861 fF
LL2
R=1e-12 OhmL=308.875011 uH
CC2C=2.651323 pF
LL1
R=1e-12 OhmL=308.875011 uH
CC1C=819.303861 fF
PortP1Num=1
Figura 4. 10: Filtro proporcionado por el ADS a partir de la guía de diseño de filtros.
Una vez tenemos la estructura del filtro pasivo pasamos a su implementación con
transconductores ideales.
© D
el d
ocum
ento
, de
los a
utor
es. D
igita
lizac
ión
real
izad
a po
r ULP
GC
. Bib
liote
ca u
nive
rsita
ria, 2
011

DISEÑO DE UN FILTRO POLIFÁSICO ACTIVO PARA UN RECEPTOR BASADO EN EL ESTÁNDAR IEEE 802.11a
67
El circuito equivalente del OTA ideal que usaremos es el que se muestra en la
Figura 4. 11. Siguiendo el procedimiento de diseño descrito al principio de este capítulo, el
filtro paso bajo activo queda tal y como se muestra en la Figura 4. 12. Como podemos ver
se ha tomado el filtro realizado con elementos pasivos del apartado anterior y se ha
sustituido las bobinas por sus circuitos equivalentes con transconductores.
Figura 4. 11: Circuito equivalente de OTA ideal utilizado inicialmente en las simulaciones.
Figura 4. 12: Filtro paso bajo activo realizado con OTAs ideales.
La respuesta del circuito, tanto en su versión pasiva como en su versión activa, se
muestra en la Figura 4. 13. Vemos que ambas respuestas se solapan perfectamente,
manteniéndose los valores de ganancia y frecuencia de corte en los valores especificados.
Capacidades propias del filtro pasivo de 5º orden
Resistencia de adaptación a la entrada (12KΩ) Resistencia de
adaptación a la salida (12KΩ)
Implementación de la primera
bobina
Implementación de la segunda
bobina
salida_IdealI_input
V_ACSRC1
Freq=freqVac=polar(1,0) V
RR3R=12000 Ohm
CC11C=CL2n
RR4R=12000 Ohm
VCCSSRC13G=gm S
VCCSSRC12G=gm S
CC7C=C3n
CC8C=C2n
VCCSSRC11G=gm S
VCCSSRC10G=gm S
VCCSSRC6G=gm S
VCCSSRC7G=gm S
CC10C=C1n
VCCSSRC8G=gm S
VCCSSRC9G=gm S
CC9C=CL1n
© D
el d
ocum
ento
, de
los a
utor
es. D
igita
lizac
ión
real
izad
a po
r ULP
GC
. Bib
liote
ca u
nive
rsita
ria, 2
011

FILTROS GM-C
68
m1freq=dB(salida_activo)=-6.021
1.000 Hz
m4freq=dB(salida_pasivo)=-6.021
100.0kHz
1E1 1E2 1E3 1E4 1E5 1E6 1E7 1E81 1E9
-200
-150
-100
-50
-250
0
freq, Hz
dB(s
alid
a_ac
tivo)
m1
dB(s
alid
a_pa
sivo
)
m4
Figura 4. 13: Respuesta del filtro en su versión pasiva y activa.
4.6. Resumen Uno de los componentes activos más utilizados para realizar circuitos básicos son
los transconductores, OTA, los cuales poseen un único parámetro, la transconductancia, o
gm, que podemos variar dependiendo de las necesidades del diseño.
Estos dispositivos junto con los condensadores, forman los filtros gm-C cuya
característica principal es la robustez de sus diseños y versatilidad para usarlos en un gran
rango de frecuencias.
Si queremos realizar filtros de primer o segundo orden con OTAs no tendremos
problemas, ya que existen tablas con las condiciones de diseño de los transconductores
para la realización de distintos tipos de filtros. Pero si por el contrario, queremos filtros de
orden alto, podemos construirlo colocando varios filtros de orden bajo en cascada, o
mediante la simulación de filtros pasivos en escalera (ladder simulation).
Siguiendo la segunda opción hemos desarrollado el filtro paso bajo activo con
OTAs ideales que, al compararlo con el filtro pasivo paso bajo prototipo, mantiene la
misma respuesta que el segundo, demostrando así la calidad del diseño. Aprovechando esta
cualidad, el siguiente paso será convertir el filtro paso bajo con OTAs ideales en su
equivalente pero con OTAs reales. Esta tarea la reservamos para el siguiente capítulo.
© D
el d
ocum
ento
, de
los a
utor
es. D
igita
lizac
ión
real
izad
a po
r ULP
GC
. Bib
liote
ca u
nive
rsita
ria, 2
011

69
Capítulo 5 OTAs reales: OTA de Nauta
Después de ver los resultados del filtro paso bajo con transconductores ideales,
pasaremos a realizar de nuevo el filtro pero con transconductores reales.
Existe un elevado número de transconductores basados en tecnología CMOS y
estudiarlos todos sería una tarea que excede los objetivos de este proyecto. Por ello, en este
capítulo sólo estudiaremos el que hemos elegido para la implementación de nuestro filtro:
el transconductor de Nauta [7].
5.1. Transconductor de Nauta El transconductor es el bloque más importante en el diseño de los filtros gm-C. Por
ello resulta importante tener un OTA con las prestaciones adecuadas. Como vimos en el
capítulo anterior, un transconductor es, idealmente, una fuente de corriente controlada por
tensión, con un ancho de banda infinito y con unas impedancias de entrada y salida
© D
el d
ocum
ento
, de
los a
utor
es. D
igita
lizac
ión
real
izad
a po
r ULP
GC
. Bib
liote
ca u
nive
rsita
ria, 2
011

OTAS REALES: OTA DE NAUTA
70
infinitas. Sin embargo, este tipo de especificaciones son imposibles de tener en un circuito
real y, por tanto, tendremos que trabajar con especificaciones más moderadas.
Como norma general, la ganancia en DC (AVDC) debe ser de al menos 40 dB y el
ancho de banda debe ser suficiente para cubrir el rango de trabajo del filtro final [5].
Con respecto al valor de la gm, su valor mínimo dependerá de la capacidad mínima
disponible en la tecnología y de la inductancia mínima requerida. Por ejemplo, si la
capacidad mínima de la tecnología es de 1 pF, para una inductancia de 15 µH
necesitaríamos una gm mínima de 250 µS.
(5.1)
Una vez conocemos los valores de AVDC y gm, la ro la podemos calcular usando la
siguiente expresión:
(5.2)
En los últimos años se ha desarrollado un elevado número de transconductores y,
tanto su diseño como sus circuitos, se pueden encontrar en la literatura. En [6] se hace un
amplio repaso de las arquitecturas de transconductores basadas en tecnologías CMOS más
utilizadas. El transconductor que hemos elegido para implementar nuestro filtro es el
denominado de Nauta [7]. Se trata de un circuito diferencial basado en el uso de inversores
CMOS, el cual posee un área reducida y es especialmente apropiado para aplicaciones de
baja tensión de alimentación.
Las características más importantes de este transconductor son las siguientes:
• El esquema del transconductor de Nauta se muestra en la Figura 5. 1. Está
formado por seis inversores. Los inversores I1 e I2 son los responsables de
generar la transconductancia, mientras que el resto se encarga de garantizar
estabilidad en modo común y proporcionar una resistencia de salida alta en
modo diferencial.
• Este transconductor posee una arquitectura diferencial y, por tanto, es simétrico
con respecto a los inversores que lo forman.
• El transconductor carece de nodos internos, excepto “gnd” y “Vdd”, lo cual abre
la posibilidad de combinar las capacidades del transconductor con las propias
del filtro. Esto permite la implementación de filtros a frecuencias altas, o bien,
filtros de orden alto para operar a frecuencias bajas.
LCgm ≥
gmAVr DC
o ≥
© D
el d
ocum
ento
, de
los a
utor
es. D
igita
lizac
ión
real
izad
a po
r ULP
GC
. Bib
liote
ca u
nive
rsita
ria, 2
011

DISEÑO DE UN FILTRO POLIFÁSICO ACTIVO PARA UN RECEPTOR BASADO EN EL ESTÁNDAR IEEE 802.11a
71
• Si definimos las transconductancias de los inversores como gmi y las
conductancias parásitas de salida como gdi, las resistencias de salida en modo
común (Rcm) y en modo diferencial (Rdm) serán respectivamente:
(5.7)
(5.8)
• Si por simplicidad suponemos que tanto las transconductancias gmi como gdi
son iguales a gm y a gd, respectivamente, las ganancias en modo común y en
modo diferencial serán:
(5.7)
(5.8)
Este resultado implica que el circuito es estable respecto al modo común (Acm
es menor que uno) y que el valor numérico de Ao dependerá de los valores de
gm y gd. Para aplicaciones a frecuencias altas, los transistores deberán tener
longitudes de canal pequeñas lo cual implica una Ao pequeña. En esos casos,
habría que aumentar la gm mediante un incremento de la tensión de
polarización del inversor I6, para tener ( )65156 gdgdgdgmgm ++−≈ .
• Dado que todos los transistores trabajan en la región de saturación, la
transconductancia resultante es una función lineal de la tensión de entrada. Es
fácil demostrar que el circuito será lineal si se satisfacen las siguientes
desigualdades:
(5.7)
(5.8)
donde ∆V es la excursión de la señal a la entrada/salida del transconductor y
TV es la tensión umbral de los transistores. Estas restricciones implican que el
65651cm gmgmgdgdgd
1R++++
=
56651dm gmgmgdgdgd
1R−+++
=
gm2gd3gmAcm ⋅+⋅
=
gd3gmAo ⋅
=
/2V∆V T≤
Tdd V/2)(V∆V −≤
© D
el d
ocum
ento
, de
los a
utor
es. D
igita
lizac
ión
real
izad
a po
r ULP
GC
. Bib
liote
ca u
nive
rsita
ria, 2
011

OTAS REALES: OTA DE NAUTA
72
valor mínimo de Vdd es 3· TV y, por tanto, el circuito puede funcionar con una
tensión de alimentación mucho menor que la del chip.
• Por lo general, los inversores de salida suelen tener el mismo tamaño que los de
entrada. Sin embargo, esto es innecesario ya que la finalidad de los inversores
de salida es, como acabamos de decir, la de proporcionar una resistencia de
salida alta en modo diferencial y la de garantizar la estabilidad respecto al modo
común mediante la minimización de la resistencia de salida en modo común.
Para conseguir esta estabilidad basta con que la transconductancia de los
inversores de entrada sea, al menos, el doble de los de la salida [5]. La relación
entre la transconductancia de los inversores de salida y la de los de entrada
suele ser de 0.6 en lugar de 0.5 para intentar que se cumpla la condición de
estabilidad respecto al modo común debido a las tolerancias en el proceso de
fabricación. Entre las ventajas de reducir la transconductancia de salida se
encuentra, en primer lugar, la reducción del consumo de potencia, que para el
factor de 0.6 es de un 27%. De igual modo, el área de los inversores disminuirá.
Otra ventaja es la relación señal a ruido a la salida, que también se verá
mejorada ya que al disminuir la corriente de los inversores de salida se
producirá menos ruido. Y por último, la linealidad del transconductor mejorará
ligeramente puesto que los transistores que dejarían primero la región de
saturación son los de los inversores de salida y si reducimos su corriente
aumentamos su linealidad.
© D
el d
ocum
ento
, de
los a
utor
es. D
igita
lizac
ión
real
izad
a po
r ULP
GC
. Bib
liote
ca u
nive
rsita
ria, 2
011

DISEÑO DE UN FILTRO POLIFÁSICO ACTIVO PARA UN RECEPTOR BASADO EN EL ESTÁNDAR IEEE 802.11a
73
2)(21
TGSn
noxnD VV
LWCI −= µ
vdd
vdd
vdd vdd vdd vdd
vdd
MOSFET_PMOSMOSFET7
Width=wp umLength=lep umModel=modp
MOSFET_NMOSMOSFET8
Width=wn umLength=len umModel=modn
MOSFET_NMOSMOSFET9
Width=wn umLength=len umModel=modn
MOSFET_PMOSMOSFET10
Width=wp umLength=lep umModel=modp
MOSFET_NMOSMOSFET6
Width=wn umLength=len umModel=modn
MOSFET_PMOSMOSFET5
Width=wp umLength=lep umModel=modp
MOSFET_PMOSMOSFET3
Width=wp umLength=lep umModel=modp
MOSFET_NMOSMOSFET4
Width=wn umLength=len umModel=modn
MOSFET_NMOSMOSFET12
Width=wn umLength=len umModel=modn
MOSFET_PMOSMOSFET11
Width=wp umLength=lep umModel=modp
MOSFET_NMOSMOSFET1
Width=wn umLength=len umModel=modn
MOSFET_PMOSMOSFET2
Width=wp umLength=lep umModel=modp
V_DCSRC2Vdc=3.3 V
Portout_masNum=4
Portout_menosNum=3
Portin_menosNum=2
Portin_masNum=1
I1
I2
I3 I4 I5 I6
Figura 5. 1: Transconductor de Nauta en ADS.
5.2. Diseño del transconductor de Nauta El diseño del transconductor de Nauta se hará de forma sencilla atendiendo a
criterios de consumo de potencia. Lo que haremos será definir las corrientes por cada rama
del transconductor a partir de la ecuación en saturación de un MOSFET tipo n, [13]:
(5.9)
Donde la DI es la corriente de drenador, oxnCµ es un coeficiente proporcionado
por la tecnología al que se le denomina factor de ganancia y viene representado por nK ,
nW representa el ancho del canal del transistor y nL la longitud del mismo. GSV es la
tensión entre la puerta y el surtidor y TV es la tensión umbral (tensión GSV a partir de la
cual se produce un aumento considerable de DI ).
Ya que estamos en saturación llamaremos satV a:
TGSsat VVV −=
© D
el d
ocum
ento
, de
los a
utor
es. D
igita
lizac
ión
real
izad
a po
r ULP
GC
. Bib
liote
ca u
nive
rsita
ria, 2
011

OTAS REALES: OTA DE NAUTA
74
2)(21
satn
nnD V
LWKI =
satn
nn V
LWKgm =
2)(2
satn
nDn VK
LIW =
Sustituyéndola en la ecuación (5.9), nos queda:
(5.10)
Por otro lado, tenemos que la transconductancia, gm, responde a la siguiente
expresión:
(5.11)
Las ecuaciones (5.10) y (5.11) son las que vamos a utilizar para el diseño del
transconductor, pero es necesario definir antes los valores de algunos parámetros que las
componen. Por ejemplo, y, como hemos dicho, siguiendo el criterio de bajo consumo de
potencia, definiremos la AI D µ200= . La satV vendrá definida por la tensión en modo
común VVddVCM 65,12
== , repartiendo la mitad de la tensión para cada tipo de transistor,
de esta forma obtendremos una VVsat 825,0= . Otro parámetro cuyo valor será también
independiente al tipo de transistor es el de mL µ2= . Hemos tomado este valor y no el
mínimo de la tecnología porque de esta manera evitaremos los problemas asociados a la
dispersión en el proceso de litografía. Además, al estar trabajando con frecuencias no
muy elevadas (comparándolas con las de radiofrecuencia) no necesitamos utilizar la
longitud mínima proporcionada por la tecnología.
El último parámetro que queda por definir es el factor de ganancia K . Este
parámetro depende del tipo de transistor con el que estemos trabajando, (tipo p o n),
aunque las ecuaciones para ambos sean las mismas (con la salvedad de que para el caso
de los p la corriente va en sentido contrario a la de los n). Según la información
proporcionada por la fundidora [14] el factor de ganancia de los transistores tipo n es 2/150 VAKn µ= y la de las tipo p es 2/45 VAK p µ= .
Una vez definidos los parámetros con los valores oportunos, pasaremos al diseño
teórico. Empezaremos por los transistores tipo n. Partiendo de la ecuación (5.10),
calcularemos nW de la siguiente forma:
(5.12)
Sustituimos con los valores propuestos y resulta:
mWn µµ
µµ 8,7)825,0(150
220022 =
⋅⋅⋅
=
© D
el d
ocum
ento
, de
los a
utor
es. D
igita
lizac
ión
real
izad
a po
r ULP
GC
. Bib
liote
ca u
nive
rsita
ria, 2
011

DISEÑO DE UN FILTRO POLIFÁSICO ACTIVO PARA UN RECEPTOR BASADO EN EL ESTÁNDAR IEEE 802.11a
75
2)(2
satp
pDp VK
LIW =
satn
nn V
LWKgm =
satp
pp V
LW
Kgm =
(5.13)
mWp µµ
µµ 12,26)825,0(45
220022 =
⋅⋅⋅
=
Lo que nos queda es hallar la transconductancia del Nauta con estas características:
(5.14)
Sustituyendo los valores del transistor tipo n resulta una transconductancia de:
Sgm µµµµ 625,482)825,0(
28,7150 ==
Para comprobar que se ha hecho correctamente la operación o, simplemente, para
verificar que los resultados obtenidos por las ecuaciones del tipo n se aproximan a los
resultados obtenidos por las ecuaciones del tipo p, hallaremos de nuevo la
transconductancia, pero ahora con los datos del transistor tipo p:
(5.15)
Sgm µµµµ 852,484)825,0(
212,2645 ==
Podemos confirmar que la transconductancia, hallada por distintas ecuaciones,
ofrece resultados similares.
5.3. Obtención de los parámetros del transconductor de Nauta a partir
de las simulaciones El siguiente paso será simular el transconductor diseñado con la ayuda del ADS.
Para trabajar más cómodamente, en lugar de utilizar el circuito completo del
transconductor de Nauta (Figura 5. 1), utilizaremos sólo su diagrama de bloques (ver
Figura 5. 2). Para obtener los parámetros característicos del transconductor vamos a
emplear un circuito creado en el ADS para este fin (Figura 5. 3). Gracias a él podremos
generar un modelo equivalente del transconductor que luego se podrá comparar con el
transconductor real.
© D
el d
ocum
ento
, de
los a
utor
es. D
igita
lizac
ión
real
izad
a po
r ULP
GC
. Bib
liote
ca u
nive
rsita
ria, 2
011

OTAS REALES: OTA DE NAUTA
76
OUT-
OUT+IN+
IN-
Figura 5. 2: Símbolo del transcoductor de Nauta.
salida_modelo
salida_cargada
salida
salida_menos
salida_mas
V_ACSRC1
Freq=freqVac=polar(1,0) V
balunX9
1
2
3
VCCSSRC4
R2=76.65 kOhmG=461.7 uS
CC1C=260.2 fF
CC2C=261.4 fF
VCVSSRC5G=1
gm_nautaX8
OUT-
OUT+IN+
IN-
VCVSSRC3G=1
gm_nautaX6
OUT-
OUT+IN+
IN-
balunX7
1
2
3
RR1R=50 Ohm
I_Probegm
balunX5
1
2
3
gm_nautaX4
OUT-
OUT+IN+
IN-
VCVSSRC2G=1
gm_nautaX3
OUT-
OUT+IN+
IN-
balunX1
1
2
3
Figura 5. 3: Modelo de simulación para medir los distintos parámetros del Nauta y compararlos con
los del transconductor ideal.
El parámetro principal que vamos a calcular es la transconductancia. Sabemos que
la in
out
VI
gm = . Si a la entrada de un transconductor se le aplica 1V, su gm tendrá el mismo
valor que la corriente de salida. El segundo circuito de la Figura 5. 3 se ha creado
especialmente para calcular la corriente de salida del transconductor siendo este el valor de
la transconductancia.
© D
el d
ocum
ento
, de
los a
utor
es. D
igita
lizac
ión
real
izad
a po
r ULP
GC
. Bib
liote
ca u
nive
rsita
ria, 2
011

DISEÑO DE UN FILTRO POLIFÁSICO ACTIVO PARA UN RECEPTOR BASADO EN EL ESTÁNDAR IEEE 802.11a
77
Una vez conocido este parámetro, podemos calcular la resistencia de salida del
transconductor. Para ello se utiliza la respuesta en magnitud de la ganancia que resulta del
primer circuito de la Figura 5. 4, ya que gm
gananciaro = , dato recogido en la Tabla 5. 1.
De la misma gráfica de la respuesta en magnitud del transconductor podemos
obtener más datos, como el valor de la ganancia en continua (AVDC) y la frecuencia a la
que cae 3dB con respecto al valor máximo (f3dB). Representando la misma respuesta pero
en fase, podemos calcular el margen de fase del Nauta (Figura 5. 5).
Por último nos queda calcular las capacidades. El cálculo más fácil es el de la
capacidad de salida, ya que los coeficientes usados en la siguiente fórmula
)··r(2·1C
3o dBo fπ= son conocidos.
La medida de la capacidad de entrada es más complicada que la anterior. En este
caso utilizamos el tercer circuito de la Figura 5. 3. Si nos fijamos en él vemos que la
conexión de los transconductores de Nauta ofrecen una salida cargada con las capacidades
de entrada y salida del transconductor. Por tanto, mediante la expresión
oadacdB
i Cf
−=)··r(2·
1Carg_3oπ
podemos hallar el último parámetro representado en la
Tabla 5. 1, donde adacdBf arg_3 es la frecuencia a partir de la cual hay 3dB menos que el
valor máximo con respecto a la nueva respuesta “salida cargada”.
Tabla 5. 1: Parámetros del transconductor de Nauta diseñado.
AVDC f3dB Margen de
Fase gm ro Co Ci
35.39 dB 7.94MHz 89.76º 461.7µS 76.65kΩ 0.26pF 0.26pF
Siguiendo el procedimiento explicado en los párrafos anteriores, obtenemos los
parámetros representados en la Tabla 5. 1. La respuesta en frecuencia, tanto en magnitud
como en fase del circuito real y su modelo usando los parámetros de la Tabla 5. 1, se
muestran en las Figuras 5.3 y 5.4. Podemos observar que prácticamente coinciden, lo cual
confirma que hemos modelado correctamente nuestro transconductor. Obsérvese que el
valor de la transconductancia que nos ha salido es ligeramente menor a la calculada
teóricamente.
© D
el d
ocum
ento
, de
los a
utor
es. D
igita
lizac
ión
real
izad
a po
r ULP
GC
. Bib
liote
ca u
nive
rsita
ria, 2
011

OTAS REALES: OTA DE NAUTA
78
m1freq=dB(salida)=-0.542
251.2MHz
1E1 1E2 1E3 1E4 1E5 1E6 1E7 1E8 1E91 1E10
-20
0
20
-40
40
freq, Hz
dB(s
alid
a) m1dB
(sal
ida_
mod
elo)
Figura 5. 4: Respuesta en magnitud del transconductor de Nauta: línea = simulación; circular =
modelo.
m2freq=phase(salida)=-89.76 deg
316.2MHz
1E1 1E2 1E3 1E4 1E5 1E6 1E7 1E8 1E91 1E10
-100
-80
-60
-40
-20
-120
0
freq, Hz
phase
(salid
a), d
eg
m2
phase
(salid
a_m
odelo
)-180
Figura 5. 5: Respuesta en fase del transconductor de Nauta: línea = simulación; circular = modelo.
El último dato que nos queda por conocer es la corriente de consumo de cada
transconductor. Para ello usamos una herramienta del ADS llamada Annotate DC Solution,
la cual nos mostrará la corriente suministrada por la fuente de tensión que alimenta a los
seis inversores del Nauta, véase la Figura 5. 6.
-1.61 mA
V_DCSRC2Vdc=3.3 V
Figura 5. 6: Fuente de tensión aplicada a todos los inversores del transconductor de Nauta.
La corriente que ofrece la fuente no es excesivamente alta, de hecho, la creemos
correcta aunque es ligeramente mayor a la esperada, ya que hemos definido que la
corriente por cada rama sea de 200µA, (200µA x 6 ramas = 1,2mA). Sin embargo, como
hemos visto en el capítulo anterior, para diseñar una bobina son necesarios cuatro
© D
el d
ocum
ento
, de
los a
utor
es. D
igita
lizac
ión
real
izad
a po
r ULP
GC
. Bib
liote
ca u
nive
rsita
ria, 2
011

DISEÑO DE UN FILTRO POLIFÁSICO ACTIVO PARA UN RECEPTOR BASADO EN EL ESTÁNDAR IEEE 802.11a
79
transconductores, en este caso el filtro paso bajo que hemos creado posee dos bobinas, con
cual harán falta ocho transconductores. Así, la corriente necesaria para el filtro sería como
mínimo de 12,88mA, algo excesivo para un filtro paso bajo. Por esta razón, vamos a
adelantarnos al diseño y bajar la corriente de cada rama rediseñando de nuevo nuestro
Nauta para evitar un consumo de potencia elevado en el filtro polifásico.
La nueva DI elegida es de 36,5µA. Dejando el resto de parámetros tal y como
estaban y sustituyendo el nuevo valor en las ecuaciones (5.12) y (5.13), tenemos los
nuevos valores de nW y pW :
mWn µµ
µµ 43,1)825,0(150
25,3622 =
⋅⋅⋅
=
mWp µµ
µµ 77,4)825,0(45
25,3622 =
⋅⋅⋅
=
Como ya se desarrolló antes, podemos conocer también el valor de la
transconductancia a partir de la ecuación (5.14):
Sgm µµµµ 48,88)825,0(
243,1150 ==
Para comprobar el procedimiento hallaremos de nuevo la gm, pero ahora a partir
de la ecuación (5.15):
Sgm µµµµ 54,88)825,0(
277,445 ==
Después de este ensayo teórico, debemos simular para contrastar los resultados y
verificar que el transconductor, a pesar de haber variado su transconductancia y la
corriente por cada rama, sigue siendo viable para nuestro proyecto.
Para facilitar este proceso volvemos a utilizar el símbolo de la Figura 5. 2 creado
en el ADS para el Nauta. En la Tabla 5. 2 se puede observar los nuevos datos obtenidos
del Nauta al simular por el mismo proceso de antes. En ella podemos apreciar que,
exceptuando la transconductancia, las capacidades de entrada y salida y la resistencia de
salida, posee las mismas características que el anterior diseño. En las Figuras 5.7 y 5.8 se
representa la respuesta en magnitud y fase del Nauta y su modelo utilizando los
parámetros de la Tabla 5. 2. Nótese que en las gráficas los marcadores se encuentran en la
misma frecuencia que en las Figuras 5.4 y 5.5, comprobando así que no existen grandes
diferencias.
© D
el d
ocum
ento
, de
los a
utor
es. D
igita
lizac
ión
real
izad
a po
r ULP
GC
. Bib
liote
ca u
nive
rsita
ria, 2
011

OTAS REALES: OTA DE NAUTA
80
Tabla 5. 2: Parámetros del nuevo transconductor de Nauta diseñado.
AVDC f3dB Margen de
Fase gm ro Co Ci
35.38 dB 7.94MHz 89.82º 82.5µS 429kΩ 0.467pF 0.464pF
m1freq=dB(salida)=-0.914
251.2MHz
1E1 1E2 1E3 1E4 1E5 1E6 1E7 1E8 1E91 1E10
-20
0
20
-40
40
freq, Hz
dB(s
alid
a) m1
dB(s
alid
a_m
odel
o)
Figura 5. 7: Respuesta en magnitud del nuevo transconductor de Nauta: línea = simulación; circular =
modelo.
m2freq=phase(salida)=-89.82 deg
316.2MHz
1E1 1E2 1E3 1E4 1E5 1E6 1E7 1E8 1E91 1E10
-100
-80
-60
-40
-20
-120
0
freq, Hz
phase
(salid
a),
deg
m2
pha
se(s
alid
a_m
odel
o)-180
Figura 5. 8: Respuesta en fase del nuevo transconductor de: línea = simulación; circular = modelo.
Por último, nos queda comprobar del nuevo diseño cuál es el consumo de potencia.
De la misma forma que antes, realizaremos la simulación en corriente continua mostrando
el resultado en la Figura 5. 9.
-288 uA
V_DCSRC2Vdc=3.3 V
Figura 5. 9: Fuente de tensión aplicada a todos los inversores del transconductor de Nauta rediseñado.
© D
el d
ocum
ento
, de
los a
utor
es. D
igita
lizac
ión
real
izad
a po
r ULP
GC
. Bib
liote
ca u
nive
rsita
ria, 2
011

DISEÑO DE UN FILTRO POLIFÁSICO ACTIVO PARA UN RECEPTOR BASADO EN EL ESTÁNDAR IEEE 802.11a
81
Haciendo unos cálculos aproximados comprobaremos que, a pesar de que la
corriente que suministra la fuente no es tan baja como se esperaba, el valor obtenido es
aceptable. El nuevo diseño se realizó de forma que por cada inversor entrara 36,5µA, si
tenemos seis ramas será: 36,5µA x 6 = 219µA, que sería la corriente esperada
teóricamente. Si aceptamos que el transconductor consuma un poco más, 288µA,
tendremos que estudiar si la corriente aproximada que necesitará nuestro filtro paso bajo,
formado por ocho transconductores, es viable. Haciendo la multiplicación obtenemos
288µA x 8 = 2,304 mA, como vemos es un buen resultado. Nótese además que cuatro
transconductores diseñados con los nuevos parámetros consumen menos incluso que un
solo transconductor diseñado con los parámetros iniciales.
5.4. Realización del filtro activo paso bajo con el transconductor de
Nauta En este apartado lo único que tenemos que hacer es transformar el circuito ideal de
la Figura 4. 12 al circuito real de la Figura 5. 12. A la hora de hacer esta transformación se
deberá tener en cuenta las siguientes consideraciones:
• El valor de los condensadores que simulan las inductancias vienen dados por: 2gmLCl ⋅= .
• Dado que los condensadores que nos salen son pequeños tenemos que tener en
cuenta las capacidades parásitas del transconductor. Por ejemplo, el
condensador C2n de la Figura 5. 12 verá en sus bornes, hacia la derecha dos
capacidades parásitas (Ci y Co) generadas por los transconductores X11 y X12,
mientras que hacia la izquierda verá las mismas capacidades pero de los
transconductores X7 y X8. Esto se traduce en:
oi CCnCnC 2222 −−⇐
De forma similar se realiza para el resto de los condensadores del circuito:
oi
oi
oi
oi
CCnCnCCCnCnC
CCnCLnCLCCnCLnCL
−−⇐−−⇐
−−⇐−−⇐
233211
22222211
© D
el d
ocum
ento
, de
los a
utor
es. D
igita
lizac
ión
real
izad
a po
r ULP
GC
. Bib
liote
ca u
nive
rsita
ria, 2
011

OTAS REALES: OTA DE NAUTA
82
• Las resistencias de adaptación las hemos generado de forma interna, éstas
poseen un valor de 12 KΩ debido a que gm
R 1= . Ésta es la razón de elegir las
impedancias de entrada y salida del filtro paso bajo prototipo de este valor,
(capítulo 4).
• Hemos añadido dos transconductores en paralelo a la entrada con objeto de
aumentar la ganancia en la banda de paso y no tener las pérdidas típicas de los
filtros pasivos.
• Dado que el transconductor de Nauta es un circuito diferencial, hemos añadido
al filtro paso bajo dos componentes que, por un lado, nos solucionará la medida
del circuito a la salida y, por el otro, facilitará la colocación de una fuente
senoidal a la entrada. Estos componentes, como ya nos hemos imaginado,
transformarán la señal de entrada de asimétrica a diferencial y de forma inversa
a la salida. Para éste último caso, hemos usado una fuente de tensión controlada
por tensión (Figura 5. 10), mientras que para la entrada hemos usado dos
fuentes como la anterior conectadas tal y como se muestra en la Figura 5. 11.
Para trabajar más cómodamente en el filtro paso bajo, lo hemos representado
mediante un símbolo al que hemos llamado “Balum” (ver Figura 5. 12).
salida_modelo
VCVSSRC5G=1
Figura 5. 10: Fuente de tensión controlada por tensión usada para transformar la señal de diferencial
en asimétrica. ©
Del
doc
umen
to, d
e lo
s aut
ores
. Dig
italiz
ació
n re
aliz
ada
por U
LPG
C. B
iblio
teca
uni
vers
itaria
, 201
1

DISEÑO DE UN FILTRO POLIFÁSICO ACTIVO PARA UN RECEPTOR BASADO EN EL ESTÁNDAR IEEE 802.11a
83
VCVSSRC2G=-0.5
VCVSSRC1G=0.5
V_DCSRC3Vdc=1.65 V
PortP1Num=1
PortP3Num=3
PortP2Num=2
Figura 5. 11: “Balum”, transforma la señal asimétrica a diferencial.
• Para crear el filtro paso bajo con transconductores de Nauta hemos partido del
filtro creado con transconductores ideales del capítulo anterior. Este filtro se
basaba en transconductores ideales asimétricos, con lo que, a la hora de
sustituirlos por los transconductores de Nauta, que son diferenciales, debemos
prestar especial atención a su conexionado.
© D
el d
ocum
ento
, de
los a
utor
es. D
igita
lizac
ión
real
izad
a po
r ULP
GC
. Bib
liote
ca u
nive
rsita
ria, 2
011

OTAS REALES: OTA DE NAUTA
84
Figura 5. 12: Filtro paso bajo activo realizado con OTAs reales.
Res
iste
ncia
12
KΩ
R
esis
tenc
ia
12KΩ
© D
el d
ocum
ento
, de
los a
utor
es. D
igita
lizac
ión
real
izad
a po
r ULP
GC
. Bib
liote
ca u
nive
rsita
ria, 2
011

DISEÑO DE UN FILTRO POLIFÁSICO ACTIVO PARA UN RECEPTOR BASADO EN EL ESTÁNDAR IEEE 802.11a
85
Los resultados obtenidos se muestran en la Figura 5. 13. Vemos que ambos filtros
presentan una respuesta similar. La única diferencia radica en la ganancia ya que, en la
versión activa, gracias a la inclusión de los dos transconductores en paralelo a la entrada,
es 5dB mayor que en la versión pasiva.
m5freq=dB(salida_real)=-35.626
20.00MHzm6freq=dB(salida_pasivo)=-36.107
20.00MHz
5 10 15 20 25 30 350 40
-60
-40
-20
-80
0
freq, MHz
dB(s
alid
a_re
al)
m5
dB(s
alid
a_pa
sivo
)
m6
Figura 5. 13: Simulaciones obtenidas del filtro paso bajo activo realizado con OTAs reales (rojo) y filtro paso bajo pasivo (azul).
Para finalizar, haremos el cálculo de la corriente consumida por el filtro paso bajo
real. Volvemos a realizar la simulación “Annotate DC Solution”, obteniendo como
resultado el representado en la Figura 5. 14. Teniendo en cuenta este resultado, el consumo
total será de: 286µA x 12 = 3,432mA, el cual es bastante aceptable si tenemos en cuenta
que el filtro está formado por 12 transconductores de Nauta.
-286 uA
V_DCSRC2Vdc=3.3 V
Figura 5. 14: Fuente de tensión aplicada a todos los inversores del transconductor de Nauta del filtro
paso bajo con transconductores reales.
© D
el d
ocum
ento
, de
los a
utor
es. D
igita
lizac
ión
real
izad
a po
r ULP
GC
. Bib
liote
ca u
nive
rsita
ria, 2
011

OTAS REALES: OTA DE NAUTA
86
5.5. Resumen Como ya hemos visto, un transconductor es, idealmente, una fuente de corriente
controlada por tensión, con un ancho de banda infinito y con unas impedancias de entrada
y salida infinitas. El Nauta no nos ofrece estas garantías ya que este tipo de
especificaciones son imposibles en un circuito real, pero posee otras ventajas que le hacen
atractivo al diseño. Por ejemplo, la carencia de nodos internos evita la aparición de
capacidades parásitas elevadas, lo cual permite que podamos trabajar con él a frecuencias
relativamente altas.
Otro motivo de su elección es la facilidad de diseño que posee, ya que a partir de
las ecuaciones en saturación de un MOSFET, se ha obtenido resultados satisfactorios sin
requerir variaciones entre los inversores de entrada y salida. Estos resultados han sido
valorados favorablemente con el filtro paso bajo, ahora deben valorarse para el filtro
polifásico.
© D
el d
ocum
ento
, de
los a
utor
es. D
igita
lizac
ión
real
izad
a po
r ULP
GC
. Bib
liote
ca u
nive
rsita
ria, 2
011

87
Capítulo 6 Filtro polifásico ideal
Como vimos en el capítulo 1, existen diferentes técnicas que permiten eliminar la
frecuencia imagen. Entre las más empleadas se encuentran el empleo de filtros de rechazo
de imagen o la implementación de arquitecturas de rechazo de imagen mediante
multiplicadores activos tales como la arquitectura Hartley o la de Weaver [4]. Estos tipos
de soluciones presentan una serie de problemas como la no integrabilidad de los filtros
necesarios o el aumento considerable de la complejidad de los terminales.
Una alternativa a estas estructuras, que recientemente está cobrando fuerza, es la
sustitución del filtro paso bajo situado al final del cabezal de RF por un filtro polifásico.
Esto supone sólo un pequeño aumento de la complejidad de los filtros paso bajo necesarios
al final del cabezal y elimina convenientemente el problema de la frecuencia imagen.
© D
el d
ocum
ento
, de
los a
utor
es. D
igita
lizac
ión
real
izad
a po
r ULP
GC
. Bib
liote
ca u
nive
rsita
ria, 2
011

FILTRO POLIFÁSICO IDEAL
88
6.1. Teoría sobre filtros polifásicos Los filtros polifásicos no son algo nuevo aunque sí su utilización para rechazar la
señal imagen en receptores de RF de FI baja. Para entender cómo son capaces de rechazar
la señal imagen, consideremos la representación compleja del esquema de bloques del
receptor mostrado en la Figura 6. 1. Con objeto de simplificar el análisis, supondremos que
sólo están presentes en la entrada del mezclador la señal deseada y su imagen. De esta
forma, las frecuencias de la señal y de la imagen serán FIOL ωω + y FIOL ωω −
respectivamente. Después de eliminar los términos en OLω2 ⋅ (el mezclador lleva implícita
una característica paso-bajo), el resultado de mezclar las señales OL y RF en el dominio
complejo es:
donde IB y QBj ⋅ son las partes real e imaginaria de la salida del mezclador y se pueden
expresar como:
donde la mezcladorG es la ganancia del mezclador.
Figura 6. 1: Representación en el dominio complejo de la arquitectura de rechazo de la frecuencia
imagen.
En las ecuaciones (6.2) y (6.3), tanto la señal deseada como la imagen, en la rama I
están desfasadas 90º con respecto a sus equivalentes en la rama Q. La Figura 6. 2 muestra,
de forma gráfica, el proceso de mezclado complejo de la señal deseada y su imagen.
Después de la conversión se mantiene la separación entre la señal y la imagen ( FIω2 ⋅ ). El
filtro de selección de canal complejo no es más que una versión desplazada en frecuencia
( ) QItωj
imagentωj
señalmezclador BjBeχeχGB FIFI ⋅+=+⋅= ⋅⋅−⋅⋅
( )t)cos(ωχt)cos(ωχGB FIimagenFIseñalmezcladorI ⋅⋅+⋅⋅⋅=
( )t)sin(ωχt)sin(ωχGB FIimagenFIseñalmezcladorQ ⋅⋅−⋅⋅⋅=
(6.1)
(6.2)
(6.3)
© D
el d
ocum
ento
, de
los a
utor
es. D
igita
lizac
ión
real
izad
a po
r ULP
GC
. Bib
liote
ca u
nive
rsita
ria, 2
011

DISEÑO DE UN FILTRO POLIFÁSICO ACTIVO PARA UN RECEPTOR BASADO EN EL ESTÁNDAR IEEE 802.11a
89
de un filtro paso bajo. Esto significa que el filtro deja pasar la señal en FIωω = , mientras
que atenúa la señal en FIωω −= .
Dado que el filtro tiene una respuesta asimétrica alrededor del eje jω, su respuesta
en el dominio del tiempo es compleja. Este comportamiento difiere del de los filtros reales
en los que los polos complejos son siempre conjugados. En los filtros complejos es posible
tener polos complejos simples (de ahí su nombre) de forma que la respuesta en frecuencia
de los filtros complejos es simétrica alrededor de FIω y no alrededor de 0.
ωOL
señalimagen
ωOL+ωFIωOL−ωFI
2ωFI
0 ωFI−ωFI
2ωFI Filtrocomplejo
Mezcla
ω
Figura 6. 2: Traslación de frecuencia de una señal y su imagen con un mezclador en cuadratura y efecto del filtrado complejo.
Filtro complejoH(s)=LP(s-jωFI)
A=Xseñal·cos((ωOL+ωFI)·t)+Xim·cos((ωOL-ωFI)·t)cos((ωOL)·t)
CI=Gmezclador·Xseñal·cos(ωFI·t)
sin((ωOL)·t)BQ=Gmezclador·(Xseñal·sin(ωFI·t)-Xim·sin(ωFI·t))
BI=Gmezclador·(Xseñal·cos(ωFI·t)+Xim·cos(ωFI·t))
CQ=Gmezclador·Xseñal·sin(ωFI·t)
Figura 6. 3: Implementación práctica del rechazo de la frecuencia imagen de la arquitectura de la
Figura 6. 2.
© D
el d
ocum
ento
, de
los a
utor
es. D
igita
lizac
ión
real
izad
a po
r ULP
GC
. Bib
liote
ca u
nive
rsita
ria, 2
011

FILTRO POLIFÁSICO IDEAL
90
Estas operaciones complejas se realizan en la práctica de la siguiente forma.
Mediante un mezclador en cuadratura, que consiste básicamente en dos mezcladores cuyas
entradas OL están desfasadas 90º (ver la Figura 6. 3), se lleva a cabo la multiplicación de la
señal real de RF por tωj FI ⋅⋅e . En la representación compleja de la Figura 6. 1, la señal
deseada a la salida del mezclador se localiza a una frecuencia FI positiva mientras que la
señal imagen es localizada a una frecuencia FI negativa. En la implementación real en la
Figura 6. 3, la señal deseada (o la imagen) en la rama I está desfasada 90º de la de la rama
Q.
Tal y como se dijo anteriormente, un filtro polifásico es capaz de hacer la distinción
entre la señal y la imagen basándose en la diferencia entre la fase de la rama I y la de la
rama Q. En el dominio complejo, un filtro paso banda polifásico es una versión desplazada
de un filtro paso bajo. Para convertir un LPF en un BPF polifásico centrado en FIω se debe
modificar cada elemento dependiente de la frecuencia en el LPF para que sea una función
de “ FIjω-s ” en lugar de “s” [4]. El elemento básico en un filtro dependiente de la
frecuencia, es el integrador. Si consideramos el caso más simple para convertir un LPF de
primer orden, con una frecuencia de corte LPω , a un filtro BPF polifásico centrado en FIω ,
para desplazar en frecuencia la respuesta del LPF se debe insertar un lazo de
realimentación tal y como se muestra en la Figura 6. 4(a). La relación compleja entre la
entrada y la salida vendrá dada por
donde iQiIi χjχχ ⋅+= y oQoIo χjχχ ⋅+= . Teniendo en cuenta estas definiciones, esta
ecuación se puede poner de la siguiente manera:
Esta distinción entre la componente en fase y en cuadratura se hace en la práctica
tal y como se muestra en la Figura 6. 4 (b).
iFILP
00 χ
ωjωsωχ ⋅
⋅−+=
⎟⎟⎠
⎞⎜⎜⎝
⎛⋅−⋅
+= oQ
o
FIiI
LP
00I χ
ωωχ
ωsωχ
⎟⎟⎠
⎞⎜⎜⎝
⎛⋅−
+= oI
o
FIiQ
LP
00Q χ
ωωχ
ωsωχ
(6.4)
(6.5)
(6.6)
© D
el d
ocum
ento
, de
los a
utor
es. D
igita
lizac
ión
real
izad
a po
r ULP
GC
. Bib
liote
ca u
nive
rsita
ria, 2
011

DISEÑO DE UN FILTRO POLIFÁSICO ACTIVO PARA UN RECEPTOR BASADO EN EL ESTÁNDAR IEEE 802.11a
91
ωFI
ωo
ωo
s+ωLP
ωo
s+ωLP-jωFI
xixo xi xo
j
(a)
Σ
ωFI
ωo
ωo
s+ωLP
xiI xoI
-ωFI
ωo
Σωo
s+ωLP
xiQ xoQ
(b)
Figura 6. 4: Conversión de un filtro paso bajo a uno polifásico centrado en ωFI. Representación
compleja (a), implementación mediante diagrama de bloques (b).
La traslación en frecuencias
o lo que es lo mismo
se puede usar de forma directa para generar la estructura de un filtro paso banda polifásico
basado en la técnica gm-C, ya que dicha traslación se puede aplicar a cada elemento
reactivo en el filtro pasivo paso bajo prototipo. Así, si nos fijamos en un condensador C
cualquiera, éste se convierte a:
donde ωFI·C es una conductancia con un valor independiente de la frecuencia. Esta
traslación se podrá hacer solamente si tenemos señales en cuadratura tal y como se ha
comentado anteriormente.
)ωjH(sH(s) FI⋅−→
( ) ( ))ωjj(ωHωjH FI⋅−→⋅
CωjCωjC)jωj(ωCωj FIFI ⋅⋅−⋅⋅=⋅−→⋅⋅
(6.7)
(6.9)
(6.8)
© D
el d
ocum
ento
, de
los a
utor
es. D
igita
lizac
ión
real
izad
a po
r ULP
GC
. Bib
liote
ca u
nive
rsita
ria, 2
011

FILTRO POLIFÁSICO IDEAL
92
En la Figura 6. 5 se muestra un ejemplo de la utilización de esta técnica. El filtro
paso bajo C-L-C de la Figura 6. 5(a) se convierte en un filtro gm-C paso bajo en la Figura
6. 5(b). La versión polifásica del filtro se muestra en la Figura 6. 5(c) la cual está
compuesta por dos filtros como el de la Figura 6. 5 (b) más los circuitos de traslación.
ω
(a)
ω
(b)
I
Q
ωωFI
(c)
Figura 6. 5: Filtro C-L-C (a), implementación gm-C (b) e implementación gm-C polifásica (c).
© D
el d
ocum
ento
, de
los a
utor
es. D
igita
lizac
ión
real
izad
a po
r ULP
GC
. Bib
liote
ca u
nive
rsita
ria, 2
011

DISEÑO DE UN FILTRO POLIFÁSICO ACTIVO PARA UN RECEPTOR BASADO EN EL ESTÁNDAR IEEE 802.11a
93
ii Cfcgm ···2π=
6.2. Implementación del filtro polifásico En este apartado explicaremos el proceso de diseño del filtro polifásico para el receptor
de 802.11a. Las especificaciones que debe tener nuestro filtro polifásico paso banda son las
siguientes:
• Ancho de banda de 20MHz
• Frecuencia central a 20MHz
• Rechazo de -30dB a 40 MHz (es decir, a 20MHz de la frecuencia central del
filtro).
El proceso de diseño comenzó en el capítulo 4 con la realización de un filtro activo
gm-C. Una vez terminado, pasamos a su transformación en un filtro activo polifásico paso
banda con OTAs ideales mediante la transformación )ωjH(sH(s) FI⋅−→ .
En la Figura 6. 6 se muestra el filtro polifásico implementado mediante
transconductores ideales. Como se comentó anteriormente, este circuito está compuesto
por dos filtros paso bajo más los transconductores encargados de hacer la transformación
)jωH(sH(s) FI−→ . Éstos últimos se diseñan atendiendo a la siguiente ecuación:
Donde igm es la transconductancia del transconductor ideal, fc la frecuencia
central del filtro y iC el valor del condensador del filtro paso bajo pasivo. Para saber la
transconductancia que necesita cada OTA, le daremos nombres distintos para
diferenciarlas (ver Figura 6. 6). De esta forma tendremos los siguientes resultados:
• Cálculo de “gmc1”:
1···21 Cfcgmc π=
Donde fFC 819,3038611 = y MHzfc 20= . Por tanto:
SfMgmc µπ 95,102303861,819·20··21 ==
• Cálculo de “gmcl1”:
1···21 Clfcgml π=
Sabiendo que: 2
1·1 gmLCl =
(6.10)
© D
el d
ocum
ento
, de
los a
utor
es. D
igita
lizac
ión
real
izad
a po
r ULP
GC
. Bib
liote
ca u
nive
rsita
ria, 2
011

FILTRO POLIFÁSICO IDEAL
94
Donde HL µ875011,3081 = y Sgm µ5,82= , sustituimos en la primera
ecuación y calculamos:
[ ] SMgml µµπ 18,264)5,82·(875011,308·20··21 2 ==
• Cálculo de “gmc2”:
2···22 Cfcgmc π=
Donde pFC 651323,22 = . Sustituyendo este valor nos queda:
SpMgmc µπ 17,333651323,2·20··22 ==
• Cálculo de “gmcl2”:
Esta capacidad viene definida por 22 ·2 gmLCl = donde
HL µ875011,3082 = y Sgm µ5,82= . Como podemos observar, coincide
totalmente con “gml1”.
• Cálculo de “gmc3”:
Para realizar el cálculo de esta transconductancia necesitamos el
valor de C3, que es idéntico al valor de C1, por tanto el valor de “gmc3”
será igual al de “gmc1”.
En la Figura 6. 7 se muestran los resultados obtenidos a partir del anterior diseño,
en ella veremos representadas las salidas del filtro en fase y cuadratura. Se puede apreciar
que, idealmente, este circuito tiene una ganancia máxima de -6.021 dB, una frecuencia
central de 20 MHz que a su vez coincide con el ancho de banda de paso del filtro. Por otro
lado, podemos observar que en 40 MHz la ganancia está por debajo de -30 dB, tal y como
hemos dispuesto en la guía de diseño del filtro paso bajo ideal.
© D
el d
ocum
ento
, de
los a
utor
es. D
igita
lizac
ión
real
izad
a po
r ULP
GC
. Bib
liote
ca u
nive
rsita
ria, 2
011

DISEÑO DE UN FILTRO POLIFÁSICO ACTIVO PARA UN RECEPTOR BASADO EN EL ESTÁNDAR IEEE 802.11a
95
salid
a_Q
Q_i
npu
t
I_in
put
salid
a_I
R R4
R=
100
0 O
hm
R R3
R=1
000
Ohm
R R2
R=
100
0 O
hm
R R1
R=1
000
Ohm
C C7
C=
CL
2n
C C8
C=C
2n
C C9
C=C
L1n
C C10
C=C
1n
VC
CS
SR
C11
G=g
m S
VC
CS
SR
C9
G=g
m S
VC
CS
SR
C8
G=g
m S
VCC
S
SRC
7G
=gm
S
VCC
SSR
C6
G=g
m S
VC
CS
SR
C10
G=g
m S
VCC
SSR
C1
3
G=
gm S
VCC
S
SRC
12
G=
gm S
VC
CS
SR
C21
G=g
m S
VC
CS
SR
C20
G=g
m S
VCC
SSR
C1
9G
=gm
S
VCC
SSR
C1
8G
=gm
S
VCC
SSR
C17
G=
gm S
VCC
S
SRC
15
G=g
m S
VCC
SSR
C1
4G
=gm
S
VCC
SSR
C16
G=
gm S
C C6
C=C
3n
VCC
SSR
C3
G=
gmc1
S
VCC
SSR
C1
G=g
mc1
S
VC
CS
SR
C4
G=g
ml1
S
VCC
S
SRC
2G
=gm
l1 S
VC
CS
SR
C5
G=g
mc2
S
VCC
S
SRC
22
G=
gmc2
S
VCC
S
SRC
23G
=gm
l2 S
VC
CS
SR
C24
G=g
ml2
S
VC
CS
SR
C25
G=g
mc3
S
VCC
S
SRC
26
G=g
mc3
C C1
C=C
1n
C C3
C=C
2nC C
4C
=CL
2n
C C2
C=
CL
1nC C
5C
=C3n
V_AC
Q_
sou
rce
Fre
q=fre
qVa
c=p
ola
r(1,
90)
V
V_AC
I_s
ourc
e
Fre
q=fre
qVa
c=p
ola
r(1,
0) V
Ent
rada
en
fase
(0º)
Ent
rada
des
fasa
da 9
0º
Figura 6. 6: Filtro polifásico implementado mediante transconductores ideales.
“gm
c3”
“gm
c2”
“gm
cl1”
“g
mc1
” “g
mcl
2”
© D
el d
ocum
ento
, de
los a
utor
es. D
igita
lizac
ión
real
izad
a po
r ULP
GC
. Bib
liote
ca u
nive
rsita
ria, 2
011
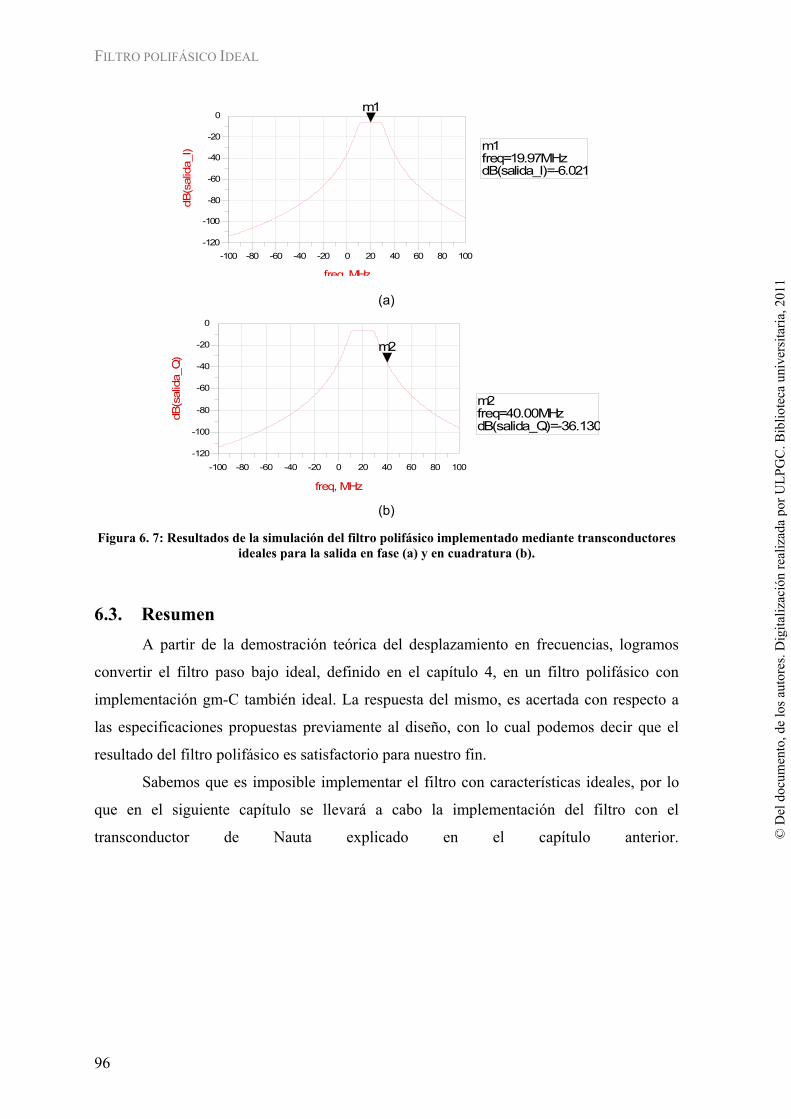
FILTRO POLIFÁSICO IDEAL
96
m1freq=dB(salida_I)=-6.021
19.97MHz
-80 -60 -40 -20 0 20 40 60 80-100 100
-100
-80
-60
-40
-20
-120
0
freq MHz
dB
(salid
a_I)
m1
(a)
m2freq=dB(salida_Q)=-36.130
40.00MHz
-80 -60 -40 -20 0 20 40 60 80-100 100
-100
-80
-60
-40
-20
-120
0
freq, MHz
dB(s
alid
a_Q
)
m2
(b)
Figura 6. 7: Resultados de la simulación del filtro polifásico implementado mediante transconductores ideales para la salida en fase (a) y en cuadratura (b).
6.3. Resumen A partir de la demostración teórica del desplazamiento en frecuencias, logramos
convertir el filtro paso bajo ideal, definido en el capítulo 4, en un filtro polifásico con
implementación gm-C también ideal. La respuesta del mismo, es acertada con respecto a
las especificaciones propuestas previamente al diseño, con lo cual podemos decir que el
resultado del filtro polifásico es satisfactorio para nuestro fin.
Sabemos que es imposible implementar el filtro con características ideales, por lo
que en el siguiente capítulo se llevará a cabo la implementación del filtro con el
transconductor de Nauta explicado en el capítulo anterior. © D
el d
ocum
ento
, de
los a
utor
es. D
igita
lizac
ión
real
izad
a po
r ULP
GC
. Bib
liote
ca u
nive
rsita
ria, 2
011

97
Capítulo 7 Filtro polifásico con OTA s reales
Una vez desarrollada la teoría del filtro polifásico y conociendo el transconductor
real de Nauta, nos disponemos a crear nuestro filtro polifásico con OTAs reales. Para ello,
partiremos del filtro realizado en la Figura 6. 6, filtro polifásico ideal, y, usando las mismas
especificaciones, haremos los cambios oportunos para obtener resultados aceptables con
los transconductores de Nauta, tal y como se hizo para el filtro paso bajo.
7.1. Realización del filtro polifásico activo Después de comprobar que los OTAs de Nauta poseen una respuesta más que
aceptable en la formación de un filtro paso bajo, en la Figura 7. 1 se muestra la versión real
del filtro polifásico. Este esquema no es más que dos filtros paso bajo cuyas entradas están
desfasadas 90º, unidos verticalmente por otros transconductores de Nauta encargados de
hacer la transformación )()( FIjsHsH ω−→ y diseñados especialmente para este fin.
© D
el d
ocum
ento
, de
los a
utor
es. D
igita
lizac
ión
real
izad
a po
r ULP
GC
. Bib
liote
ca u
nive
rsita
ria, 2
011

FILTRO POLIFÁSICO CON OTAS REALES
98
Q_i
nput
salid
a_Q
I_in
put
salid
a_I
C C8
C=C
1 F
C L6 C=C
L1 F
C C9
C=C
2 F
C L5 C=C
L2 F
C C7
C=C
3 F
C C11
C=C
1 F
C L8 C=C
L1 F
C C12
C=C
2 F
C L7 C=C
L2 F
C C10
C=C
3 F
gm_n
auta
_gm
l1_2
X35
I=14
4.4
uA
OUT-
OUT+I N+
I N-
R R5
R=1
MO
hm
TF TF3
T=1.
00
gm_n
auta
X50
OUT
-
OUT
+IN
+
IN-
gm_n
auta
X54
OUT-
OUT+
IN+
IN-
gm_n
auta
X53
OUT
-
OUT
+IN
+
IN-
gm_n
auta
X52
OUT
-
OUT
+IN
+
IN-
gm_n
auta
X55
OUT-
OUT+
IN+
IN-
gm_n
auta
X41
OUT
-
OUT
+IN
+
IN-
gm_n
auta
X42
OUT-
OUT+
IN+
IN-
gm_n
auta
_gm
c2X
33I=
144
uA
OUT-
OUT+I N+
I N-
gm_n
auta
_gm
c2X
32I=
144
uA
OUT-
OUT+ IN+
IN-
gm_n
auta
X58
OUT
-
OUT
+IN
+
IN-
gm_n
auta
X56
OUT-
OUT+
IN+
IN-
V_A
CS
RC
1
Freq
=fre
qV
ac=p
olar
(1,0
) V
R R3
R=5
0 O
hm
gm_n
auta
X2
OUT
-
OUT
+IN
+
IN-
gm_n
auta
X3
OUT
-
OUT
+IN
+
IN-
gm_n
auta
X47
OUT
-
OUT
+IN
+
IN-
TF TF1
T=1.
00
V_D
CS
RC
6V
dc=1
.65
V
gm_n
auta
X59
OUT
-
OUT
+IN
+
IN-
V_A
CS
RC
9
Freq
=fre
qV
ac=p
olar
(1,9
0) V
gm_n
auta
_gm
c1_3
X30
I=45
.2 u
A
OUT-
OUT+ IN+
IN-
gm_n
auta
_gm
c1_3
X31
I=45
.2 u
A
OUT-
OUT+I N+
I N-
gm_n
auta
_gm
l1_2
X34
I=14
4.4
uA
OUT-
OUT+ IN+
IN-
gm_n
auta
_gm
l1_2
X28
I=14
4.4
uA
OUT-
OUT+ IN+
IN-
gm_n
auta
_gm
l1_2
X29
I=14
4.4
uA
OUT-
OUT+I N+
I N-
gm_n
auta
_gm
c1_3
X27
I=45
.2 u
A
OUT-
OUT+ IN+
IN-
gm_n
auta
_gm
c1_3
X26
I=45
.2 u
A
OUT-
OUT+I N+
I N-
gm_n
auta
X46
OUT
-
OUT
+IN
+
IN-
gm_n
auta
X38
OUT
-
OUT
+IN
+
IN-
gm_n
auta
X49
OUT
-
OUT
+IN
+
IN-
gm_n
auta
X60
OUT
-
OUT
+IN
+
IN-
gm_n
auta
X51
OUT
-
OUT
+IN
+
IN-
gm_n
auta
X57
OUT-
OUT+
IN+
IN-
gm_n
auta
X43
OUT-
OUT+
IN+
IN-
gm_n
auta
X40
OUT
-
OUT
+IN
+
IN-
gm_n
auta
X45
OUT-
OUT+
IN+
IN-
gm_n
auta
X39
OUT
-
OUT
+IN
+
IN-
gm_n
auta
X44
OUT-
OUT+
IN+
IN-
R R4
R=1
MO
hm
TF TF2
T=1.
00
R R6
R=5
0 O
hm
TF TF4
T=1.
00
V_D
CS
RC
8V
dc=1
.65
V
Figura 7. 1: Filtro polifásico implementado mediante transconductores reales.
© D
el d
ocum
ento
, de
los a
utor
es. D
igita
lizac
ión
real
izad
a po
r ULP
GC
. Bib
liote
ca u
nive
rsita
ria, 2
011

DISEÑO DE UN FILTRO POLIFÁSICO ACTIVO PARA UN RECEPTOR BASADO EN EL ESTÁNDAR IEEE 802.11a
99
ii Cfcgm ···2π=
7.2. Diseño de los nuevos transconductores de Nauta Los nuevos transconductores siguen unas reglas de diseño diferentes a los ideales,
exceptuando las transconductancias que aplicamos en el capítulo anterior, es decir, para
que los transconductores cumplan con el propósito de transformación de
)()( FIjsHsH ω−→ habrá que fijar primero la transconductancia mediante la ecuación
(6.10):
7.2.1. Diseño del transconductor de Nauta “gmc1”
A partir de la ecuación (6.10) calculamos el primer transconductor encargado del
desplazamiento en frecuencia. A éste lo llamamos “gmc1”, ya que la transconductancia
depende del condensador C1 del ladder pasivo, (ver capítulo 4). La colocación de este
transconductor en el filtro se puede ver en la Figura 7. 2, el cual, para que realice su
función correctamente, está unido a otro cuyas características son similares. Por tanto en la
primera rama tenemos dos transconductores “gmc1” cuya transconductancia debe valer:
1···21 Cfcgmc π=
Donde fFC 819,3038611 = y MHzfc 20=
SfMgmc µπ 95,102303861,819·20··21 ==
Aplicando ahora las ecuaciones (5.14) y (5.15) primero y (5.10) después, tendremos
los parámetros necesarios para diseñar los Nauta “gmc1”. Recordando que los valores
necesarios para la ecuación son vVsat 825,0= , mL µ2= , mKn µ150= y mK p µ45= ,
haremos:
satn
nn VK
gmLW =
Sustituyendo los valores:
mWn µµ
µµ 66,1825,0·1502·95,102
==
De la misma forma hallamos pW :
mWp µµ
µµ 54,5825,0·45
2·95,102==
© D
el d
ocum
ento
, de
los a
utor
es. D
igita
lizac
ión
real
izad
a po
r ULP
GC
. Bib
liote
ca u
nive
rsita
ria, 2
011

FILTRO POLIFÁSICO CON OTAS REALES
100
C C8
C=C
1 F
C L6 C=C
L1 F
C C9
C=C
2 F
C L5 C=C
L2 F
C C7
C=C
3 F
C C11
C=C
1 F
C L8 C=C
L1 F
C C12
C=C
2 F
C L7 C=C
L2 F
C C10
C=C
3 F
gm_n
auta
_gm
l1_2
X35
I=14
4.4
uA
OUT-
OUT+I N+
I N-
gm_n
auta
X50
OUT
-
OUT
+IN
+
IN-
gm_n
auta
X54
OUT-
OUT+
IN+
IN-
gm_n
auta
X53
OUT
-
OUT
+IN
+
IN-
gm_n
auta
X52
OUT
-
OUT
+IN
+
IN-
gm_n
auta
X55
OUT-
OUT+
IN+
IN-
gm_n
auta
X41
OUT
-
OUT
+IN
+
IN-
gm_n
auta
X42
OUT-
OUT+
IN+
IN-
gm_n
auta
_gm
c2X
33I=
144
uA
OUT-
OUT+I N+
I N-
gm_n
auta
_gm
c2X
32I=
144
uA
OUT-
OUT+ IN+
IN-
gm_n
auta
X58
OUT
-
OUT
+IN
+
IN-
gm_n
auta
X56
OUT-
OUT+
IN+
IN-
gm_n
auta
X2
OUT
-
OUT
+IN
+
IN-
gm_n
auta
X3
OUT
-
OUT
+IN
+
IN-
gm_n
auta
X47
OUT
-
OUT
+IN
+
IN-
.00
V_D
CS
RC
6V
dc=1
.65
V
gm_n
auta
X59
OUT
-
OUT
+IN
+
IN-
gm_n
auta
_gm
c1_3
X30
I=45
.2 u
A
OUT-
OUT+ IN+
IN-
gm_n
auta
_gm
c1_3
X31
I=45
.2 u
A
OUT-
OUT+I N+
I N-
gm_n
auta
_gm
l1_2
X34
I=14
4.4
uA
OUT-
OUT+ IN+
IN-
gm_n
auta
_gm
l1_2
X28
I=14
4.4
uA
OUT-
OUT+ IN+
IN-
gm_n
auta
_gm
l1_2
X29
I=14
4.4
uA
OUT-
OUT+I N+
I N-
gm_n
auta
_gm
c1_3
X27
I=45
.2 u
A
OUT-
OUT+ IN+
IN-
gm_n
auta
_gm
c1_3
X26
I=45
.2 u
A
OUT-
OUT+I N+
I N-
gm_n
auta
X46
OUT
-
OUT
+IN
+
IN-
gm_n
auta
X38
OUT
-
OUT
+IN
+
IN-
gm_n
auta
X49
OUT
-
OUT
+IN
+
IN-
gm_n
auta
X60
OUT
-
OUT
+IN
+
IN-
gm_n
auta
X51
OUT
-
OUT
+IN
+
IN-
gm_n
auta
X57
OUT-
OUT+
IN+
IN-
gm_n
auta
X43
OUT-
OUT+
IN+
IN-
gm_n
auta
X40
OUT
-
OUT
+IN
+
IN-
gm_n
auta
X45
OUT-
OUT+
IN+
IN-
gm_n
auta
X39
OUT
-
OUT
+IN
+
IN-
gm_n
auta
X44
OUT-
OUT+
IN+
IN-
F F4 =1.0
0
V_D
CS
RC
8V
dc=1
.65
V
Figura 7. 2: Filtro polifásico en el que se señalan los transconductores reales responsables del desplazamiento en frecuencia.
Nau
ta
“gm
”
Nau
ta
“gm
c1”
Nau
ta
“gm
cl1”
N
auta
“g
mc2
” N
auta
“g
mcl
2”
Nau
ta
“gm
c3”
© D
el d
ocum
ento
, de
los a
utor
es. D
igita
lizac
ión
real
izad
a po
r ULP
GC
. Bib
liote
ca u
nive
rsita
ria, 2
011

DISEÑO DE UN FILTRO POLIFÁSICO ACTIVO PARA UN RECEPTOR BASADO EN EL ESTÁNDAR IEEE 802.11a
101
Por último aplicamos la ecuación (5.10), calculando de forma aproximada la
corriente que debe pasar por cada rama:
AI D µµµµ 36,42)825,0(
266,1150
21 2 ==
Para comprobar que no nos hemos equivocado calcularemos otra vez la corriente
mediante pW :
AI D µµµµ 41,42)825,0(
254,545
21 2 ==
Efectivamente, esta es la corriente que teóricamente debería circular por cada rama
de los inversores del Nauta. Ahora sólo falta comprobar que con los datos obtenidos la
simulación en ADS resulta una transconductancia similar a la que se ha propuesto al
principio.
Tras la mencionada simulación obtenemos que con una corriente de 42.4µA resulta
una gm un poco baja, (ver Figura 7. 3). Dado que es importante para el buen
funcionamiento del filtro polifásico que se llegue a la transconductancia calculada,
debemos subir la gm, lo cual se consigue subiendo la corriente por cada rama.
ro367.7k
gm096.24u
co54.50f
Figura 7. 3: Gm simulada del Nauta “gmc1”.
Variando ligeramente la corriente a 45,2µA, conseguimos aumentar la gm a
102,8µS, valor próximo al estrictamente necesario.
En cuanto al consumo, lo podemos mirar con la opción Annotate DC Solution,
Figura 7. 4. Teniendo en cuenta que van a ser dos transconductores con las mismas
características diremos que el consumo por parte de los transconductores “gmc1” será de
358µ x 2 = 716µA.
3.30 Vvdd-358 uA
V_DCSRC2Vdc=3.3 V
Figura 7. 4: Consumo de corriente del transconductor “gmc1”.
© D
el d
ocum
ento
, de
los a
utor
es. D
igita
lizac
ión
real
izad
a po
r ULP
GC
. Bib
liote
ca u
nive
rsita
ria, 2
011

FILTRO POLIFÁSICO CON OTAS REALES
102
7.2.2. Diseño del transconductor de Nauta “gmcl1”
Representado en la Figura 7. 2, el transconductor “gmcl1” depende del
condensador Cl1, capacidad que resulta al sustituir la bobina del ladder pasivo por los
transconductores pertinentes, (ver capítulo 4). Al igual que en el caso anterior, se diseñará
partiendo de la transconductancia calculada mediante la siguiente expresión:
1···21 Clfcgmcl π=
Sabiendo que: 2
1·1 gmLCl =
Donde HL µ875011,3081 = y Sgm µ5,82= , sustituimos en la primera ecuación y
calculamos:
[ ] SMgmcl µµπ 18,264)5,82·(875011,308·20··21 2 ==
El siguiente paso será calcular el ancho del canal de los transistores, tanto n como p:
mWn µµ
µµ 26,4825,0·1502·18,264
==
mWp µµ
µµ 23,14825,0·45
2·18,264==
A partir de aquí ya podemos calcular la corriente de drenador, primero con los
transistores tipo n:
AI D µµµµ 72,108)825,0(
226,4150
21 2 ==
Y ahora con los de tipo p para contrastar resultados:
AI D µµµµ 95,108)825,0(
223,1445
21 2 ==
Seguidamente colocamos los datos obtenidos en nW , pW e DI en el ADS y
simulamos el transconductor de Nauta “gmcl1”. Al igual que en caso anterior, la
transconductancia ha resultado ser un poco menor de la esperada, por lo que aumentamos
ligeramente la corriente de drenador hasta 114,4µA, obteniendo una gm de 264,2µS.
Utilizando de nuevo Annotate DC Solution vemos el consumo de corriente de este
transconductor, (Figura 7. 5). El consumo de los dos transconductores “gmcl1” será de
921µ x 2 =1,842mA.
© D
el d
ocum
ento
, de
los a
utor
es. D
igita
lizac
ión
real
izad
a po
r ULP
GC
. Bib
liote
ca u
nive
rsita
ria, 2
011

DISEÑO DE UN FILTRO POLIFÁSICO ACTIVO PARA UN RECEPTOR BASADO EN EL ESTÁNDAR IEEE 802.11a
103
-921 uA
V_DCSRC2Vdc=3.3 V
Figura 7. 5: Consumo de corriente del transconductor “gmcl1”.
7.2.3. Diseño del transconductor de Nauta “gmc2”
En la Figura 7. 2 se muestra la posición que toma el transconductor “gmc2” dentro
del filtro, dado así en llamar debido a que su transconductancia depende condensador C2.
Para su cálculo se empleará la ecuación (6.10), definida para este caso de la siguiente
manera:
2···22 Cfcgmc π=
Donde pFC 651323,22 = . Sustituyendo este valor nos queda:
SpMgmc µπ 17,333651323,2·20··22 ==
Ahora calcularemos DI , nW y pW para luego simular y comparar los datos con los
teóricos.
mWn µµ
µµ 38,5825,0·1502·17,333
==
mWp µµ
µµ 94,17825,0·45
2·17,333==
AI D µµµµ 31,137)825,0(
238,5150
21 2 ==
Comprobamos que efectivamente coinciden las DI :
AI D µµµµ 36,137)825,0(
294,1745
21 2 ==
Simulamos y comprobamos que con una corriente DI =144µA conseguimos una
transconductancia de 333,3µS. El consumo de un transconductor viene representado en la
Figura 7. 6, siendo el consumo de los dos: 1,16mA x 2 = 2,32mA.
© D
el d
ocum
ento
, de
los a
utor
es. D
igita
lizac
ión
real
izad
a po
r ULP
GC
. Bib
liote
ca u
nive
rsita
ria, 2
011

FILTRO POLIFÁSICO CON OTAS REALES
104
-1.16 mA
V_DCSRC2Vdc=3.3 V
Figura 7. 6: Consumo de corriente del transconductor “gmc2”.
7.2.4. Diseño del transconductor de Nauta “gmcl2”
Nuevamente la situación de este transconductor se muestra en la Figura 7. 2 y, al
igual que “gmcl1”, depende de la capacidad que se crea cuando se sustituye la bobina por
los transconductores correspondientes, es decir, depende de Cl2. Esta capacidad viene
definida por 22 ·2 gmLCl = donde HL µ875011,3082 = y Sgm µ5,82= . Como podemos
apreciar el cálculo de “gmcl2” coincide totalmente con el de “gmcl1”, por lo que no será
necesario el desarrollo de un nuevo diseño.
7.2.5. Diseño del transconductor de Nauta “gmc3”
Por último, nos queda el transconductor “gmc3” que, como vemos en la Figura 7. 2,
es el de la derecha. Este transconductor depende de C3, capacidad dada por el ADS cuando
diseñamos el ladder, capítulo 4. La ecuación a utilizar será la misma que hemos utilizado
para todos, la ecuación (6.10). Antes de sustituir los valores en ella nos fijamos que el
valor de C3 coincide con el de C1, por lo que tampoco será preciso el diseño de este
transconductor.
7.3. Simulación del filtro polifásico activo Una vez configurados todos los transconductores nos disponemos a simular para
verificar los resultados.
En la Figura 7. 7 se observan las salidas en fase y en cuadratura del filtro polifásico
real.
© D
el d
ocum
ento
, de
los a
utor
es. D
igita
lizac
ión
real
izad
a po
r ULP
GC
. Bib
liote
ca u
nive
rsita
ria, 2
011

DISEÑO DE UN FILTRO POLIFÁSICO ACTIVO PARA UN RECEPTOR BASADO EN EL ESTÁNDAR IEEE 802.11a
105
m1freq=dB(salida_I)=-7.335
26.62MHz
m5freq=dB(salida_I)=-10.002
14.05MHz
-80 -60 -40 -20 0 20 40 60 80-100 100
-100
-80
-60
-40
-20
-120
0
freq, MHz
dB(s
alid
a_I)
m1m5
dB(filt
ro_p
olifa
sico
_ide
al..sa
lida_
I)
(a)
m4freq=dB(salida_Q)=-41.544
40.00MHz
-80 -60 -40 -20 0 20 40 60 80-100 100
-100
-80
-60
-40
-20
-120
0
freq, MHz
dB(s
alid
a_Q
) m4
dB(filt
ro_p
olifa
sico
_ide
al..s
alid
a_Q
)
(b)
Figura 7. 7: Resultados de la simulación del filtro polifásico implementado mediante transconductores
reales para la salida en fase (a) y en cuadratura (b), junto con la salida obtenida con transconductores
ideales, (en rojo).
En las gráficas representadas en la Figura 7. 7 se pueden observar las respuestas de
los filtros polifásicos con transconductores ideales y con los de Nauta. Vemos que la
respuesta del filtro polifásico con transconductores de Nauta está centrada en la frecuencia
de 20MHz pero no tiene una banda de paso plana como esperábamos.
Para mejorar las características del diseño hemos variando ligeramente los valores
de los componentes pasivos que forman el filtro paso bajo prototipo. En la Figura 7. 8 se
muestran los datos iniciales que dieron lugar a la respuesta anterior y en la Figura 7. 9 se
muestran los datos obtenidos tras la optimización. La respuesta del filtro polifásico con los
nuevos valores se muestra en la Figura 7. 10.
© D
el d
ocum
ento
, de
los a
utor
es. D
igita
lizac
ión
real
izad
a po
r ULP
GC
. Bib
liote
ca u
nive
rsita
ria, 2
011

FILTRO POLIFÁSICO CON OTAS REALES
106
Figura 7. 8: Valores iniciales obtenidos por la guía de diseño de filtros del ADS.
CL2=L2*gm 2CL1=L1*gm 2L2=L1L1=300 uC3=C1C2=2 pC1=300 f
Figura 7. 9: Valores obtenidos tras varias
simulaciones para mejorar el diseño.
m1freq=dB(salida_I)=-3.566
19.07MHz
m5freq=dB(salida_I)=-6.544
24.47MHz
m6freq=dB(salida_I)=-6.642
11.14MHz
-80 -60 -40 -20 0 20 40 60 80-100 100
-100
-80
-60
-40
-20
-120
0
freq, MHz
dB(s
alid
a_I)
m1m5m6
dB(filt
ro_p
olifa
sico
_ide
al..s
alid
a_I)
(a)
m4freq=dB(salida_Q)=-25.737
40.00MHz
-80 -60 -40 -20 0 20 40 60 80-100 100
-100
-80
-60
-40
-20
-120
0
freq, MHz
dB(s
alid
a_Q
)
m4
dB(filt
ro_p
olifa
sico
_ide
al..s
alid
a_Q
)
(b)
Figura 7. 10: Resultados de la simulación del filtro polifásico implementado mediante
transconductores reales para la salida en fase (a) y en cuadratura (b) con valores nuevos de los
componentes pasivos.
Como puede apreciarse, el filtro creado con los nuevos valores, es muy diferente al
anterior. El criterio seguido para presentar este filtro como el definitivo, ha sido eliminar el
valle de la banda de paso. Gracias a los marcadores colocados en las gráficas podemos ver
algunas de las prestaciones que nos ofrece el filtro polifásico como la frecuencia central,
CL2=L2*gm 2CL1=L1*gm 2L2=L1L1=308.875 uC3=C1C2=2.6513 pC1=819.303 f
© D
el d
ocum
ento
, de
los a
utor
es. D
igita
lizac
ión
real
izad
a po
r ULP
GC
. Bib
liote
ca u
nive
rsita
ria, 2
011

DISEÑO DE UN FILTRO POLIFÁSICO ACTIVO PARA UN RECEPTOR BASADO EN EL ESTÁNDAR IEEE 802.11a
107
que se encuentra alrededor de 18MHz, el ancho de banda, aproximadamente de 13MHz y
el rechazo de banda de -25dB a 40MHz.
Otra característica importante del diseño es el consumo. Este se puede calcular
fácilmente recopilando los consumos de los transconductores diseñados en éste y en el
capítulo 5:
• Transconductor de Nauta “gm”: 288µA x 24 = 6,912mA
• Transconductor de Nauta “gmc1_3”: 358µA x 4 = 1,432mA
• Transconductor de Nauta “gmc2”: 1,16mA x 2 = 2,32mA
• Transconductor de Nauta “gmcl1_2”: 921µ x 4 =3,684mA
La fuente de tensión deberá abastecer al filtro con, al menos, 14,348mA.
7.4. Resumen Los transconductores de Nauta poseen una buena respuesta cuando se utilizan para
el diseño del filtro paso bajo. Es por ello por lo que utilizamos los mismos
transconductores para el diseño del filtro polifásico real junto con los cambios oportunos
en el circuito. Uno de esos cambios es el diseño de los transconductores encargados de
hacer el desplazamiento en frecuencia, “gmc1”, “gmcl1”, “gmc2”, “gmcl2” y “gmc3”.
A la hora de simular hemos obtenido una respuesta del filtro no esperada pero,
variando el valor de los componentes pasivos, hemos podido llegar a un resultado
aceptable con respecto al primer diseño, ya que hemos aumentando el ancho de banda y
hemos conseguido una banda de paso más plana.
© D
el d
ocum
ento
, de
los a
utor
es. D
igita
lizac
ión
real
izad
a po
r ULP
GC
. Bib
liote
ca u
nive
rsita
ria, 2
011

© D
el d
ocum
ento
, de
los a
utor
es. D
igita
lizac
ión
real
izad
a po
r ULP
GC
. Bib
liote
ca u
nive
rsita
ria, 2
011

109
Capítulo 8 Conclusión
A lo largo de los capítulos que componen el proyecto hemos visto como los filtros
polifásicos (también llamados filtros complejos) permiten el rechazo de la frecuencia
imagen a frecuencias bajas. Con objeto de demostrar la viabilidad de este tipo de filtros,
hemos implementado a nivel de esquemático un filtro para un receptor basado en el
estándar IEEE 802.11a. En este capítulo veremos las principales conclusiones a las que
hemos llegad a lo largo de este trabajo. Así mismo, se hará una comparación con otros
filtros polifásicos encontrados en la literatura que, si bien, no poseen las mismas
características que el nuestro, podemos utilizarlos para tener una idea de la calidad de las
prestaciones alcanzadas.
© D
el d
ocum
ento
, de
los a
utor
es. D
igita
lizac
ión
real
izad
a po
r ULP
GC
. Bib
liote
ca u
nive
rsita
ria, 2
011
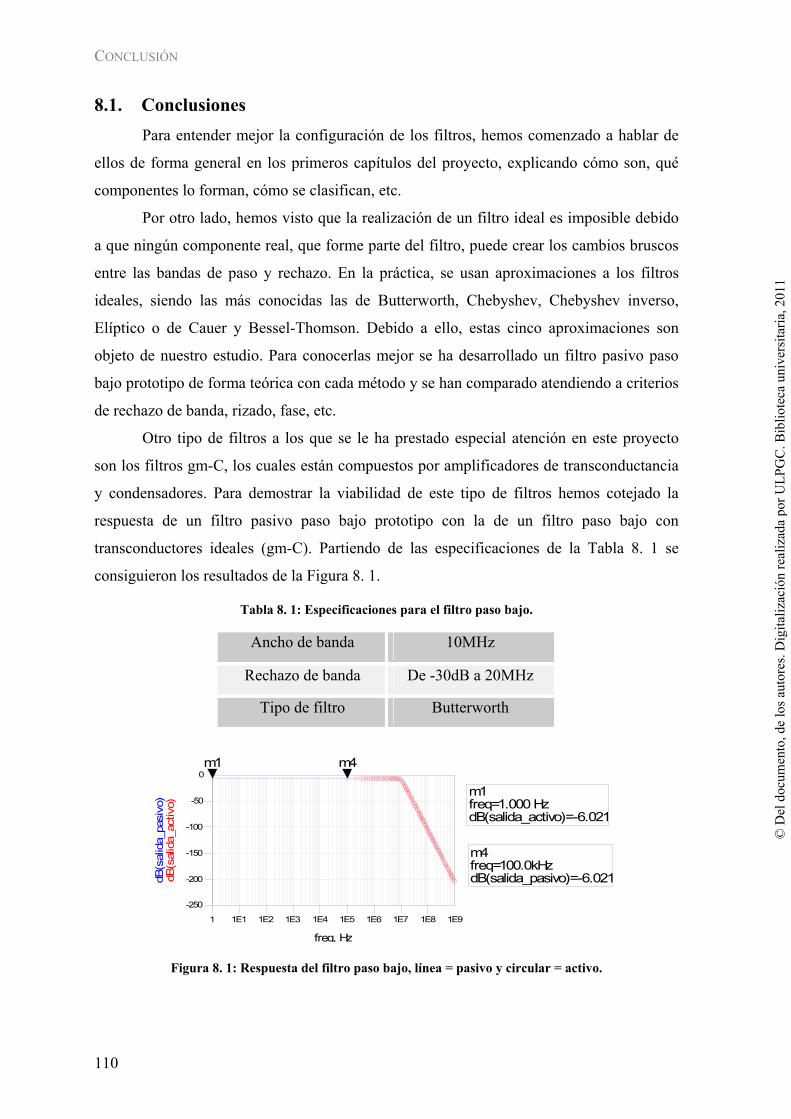
CONCLUSIÓN
110
8.1. Conclusiones Para entender mejor la configuración de los filtros, hemos comenzado a hablar de
ellos de forma general en los primeros capítulos del proyecto, explicando cómo son, qué
componentes lo forman, cómo se clasifican, etc.
Por otro lado, hemos visto que la realización de un filtro ideal es imposible debido
a que ningún componente real, que forme parte del filtro, puede crear los cambios bruscos
entre las bandas de paso y rechazo. En la práctica, se usan aproximaciones a los filtros
ideales, siendo las más conocidas las de Butterworth, Chebyshev, Chebyshev inverso,
Elíptico o de Cauer y Bessel-Thomson. Debido a ello, estas cinco aproximaciones son
objeto de nuestro estudio. Para conocerlas mejor se ha desarrollado un filtro pasivo paso
bajo prototipo de forma teórica con cada método y se han comparado atendiendo a criterios
de rechazo de banda, rizado, fase, etc.
Otro tipo de filtros a los que se le ha prestado especial atención en este proyecto
son los filtros gm-C, los cuales están compuestos por amplificadores de transconductancia
y condensadores. Para demostrar la viabilidad de este tipo de filtros hemos cotejado la
respuesta de un filtro pasivo paso bajo prototipo con la de un filtro paso bajo con
transconductores ideales (gm-C). Partiendo de las especificaciones de la Tabla 8. 1 se
consiguieron los resultados de la Figura 8. 1.
Tabla 8. 1: Especificaciones para el filtro paso bajo.
Ancho de banda 10MHz
Rechazo de banda De -30dB a 20MHz
Tipo de filtro Butterworth
m1freq=dB(salida_activo)=-6.021
1.000 Hz
m4freq=dB(salida_pasivo)=-6.021
100.0kHz
1E1 1E2 1E3 1E4 1E5 1E6 1E7 1E81 1E9
-200
-150
-100
-50
-250
0
freq, Hz
dB(s
alid
a_ac
tivo)
m1
dB(s
alid
a_pa
sivo
)
m4
Figura 8. 1: Respuesta del filtro paso bajo, línea = pasivo y circular = activo.
© D
el d
ocum
ento
, de
los a
utor
es. D
igita
lizac
ión
real
izad
a po
r ULP
GC
. Bib
liote
ca u
nive
rsita
ria, 2
011

DISEÑO DE UN FILTRO POLIFÁSICO ACTIVO PARA UN RECEPTOR BASADO EN EL ESTÁNDAR IEEE 802.11a
111
Como se puede observar los resultados son idénticos cuando usamos
transconductores ideales, pero la verdadera demostración de la validez de este tipo de
filtros, se demuestra con transconductores reales.
Dentro de la gran familia de OTAs que hay disponibles para el diseño, es
importante elegir uno con las prestaciones adecuadas, ya que será el bloque más importante
del filtro gm-C. El transconductor que hemos elegido para nuestro proyecto es el de Nauta,
el cual posee, entre otras ventajas, la de tener un área reducida y ser apropiado para
aplicaciones de baja tensión de alimentación.
Sustituyendo los OTAs ideales por los de Nauta, de la misma forma que se explicó
en el capítulo 5, creamos el filtro paso bajo activo con OTAs reales. Dado que las
especificaciones del filtro son las mismas que para el caso anterior (Tabla 8. 1), se
comparó en una misma gráfica el filtro pasivo paso bajo y el activo con OTAs de Nauta,
(Figura 8. 2).
m5freq=dB(salida_real)=-35.626
20.00MHzm6freq=dB(salida_pasivo)=-36.107
20.00MHz
5 10 15 20 25 30 350 40
-60
-40
-20
-80
0
freq, MHz
dB(s
alid
a_re
al)
m5
dB(s
alid
a_pa
sivo
)
m6
Figura 8. 2: Simulaciones obtenidas del filtro paso bajo activo realizado con OTAs reales (rojo) y filtro
paso bajo pasivo (azul).
Nótese que el aumento en la ganancia del filtro activo es debido los dos
transconductores en paralelo colocados en la entrada para evitar las pérdidas típicas de los
filtros pasivos.
Una vez demostrado el buen funcionamiento de los filtros gm-C con
transconductores de Nauta, llegamos a la última etapa del proyecto, el filtro polifásico.
Tras haber realizado un estudio teórico del funcionamiento de estos filtros, donde se
explica detalladamente el proceso para transformar un filtro paso bajo en uno polifásico,
pasamos a la implementación del mismo utilizando OTAs ideales.
© D
el d
ocum
ento
, de
los a
utor
es. D
igita
lizac
ión
real
izad
a po
r ULP
GC
. Bib
liote
ca u
nive
rsita
ria, 2
011

CONCLUSIÓN
112
Este nuevo diseño debe cumplir las especificaciones impuestas en la Tabla 8. 2, a
partir de las cuales se obtiene la respuesta representada en la Figura 8. 3.
Tabla 8. 2: Especificaciones para el filtro polifásico.
Ancho de banda 20MHz
Rechazo de banda De -30dB a 40MHz
Frecuencia central 20MHz
Tipo de filtro Butterworth
m1freq=dB(salida_I)=-6.021
19.97MHz
-80 -60 -40 -20 0 20 40 60 80-100 100
-100
-80
-60
-40
-20
-120
0
freq MHz
dB
(salid
a_I)
m1
Figura 8. 3: Resultados de la simulación del filtro polifásico implementado mediante transconductores
ideales para la salida en fase.
Hemos obviado la salida en cuadratura puesto que es idéntica a su salida en fase. Se
puede comprobar que el diseño cumple fielmente las especificaciones propuestas.
El último paso dado fue transformar el filtro polifásico ideal en real. Esto se hizo
con algunos inconvenientes, ya que los transconductores reales no tienen las mismas
prestaciones que los ideales. Volviendo a usar los parámetros de la Tabla 8. 2 y variando el
valor de los componentes pasivos obtenemos el resultado representado en la Figura 8. 4.
m1freq=dB(salida_I)=-3.566
19.07MHz
m5freq=dB(salida_I)=-6.544
24.47MHz
m6freq=dB(salida_I)=-6.642
11.14MHz
-80 -60 -40 -20 0 20 40 60 80-100 100
-100
-80
-60
-40
-20
-120
0
freq, MHz
dB(s
alid
a_I)
m1m5m6
dB(filt
ro_p
olifa
sico
_ide
al..s
alid
a_I)
Figura 8. 4: Resultados de la simulación del filtro polifásico implementado mediante transconductores
reales para la salida en fase.
© D
el d
ocum
ento
, de
los a
utor
es. D
igita
lizac
ión
real
izad
a po
r ULP
GC
. Bib
liote
ca u
nive
rsita
ria, 2
011

DISEÑO DE UN FILTRO POLIFÁSICO ACTIVO PARA UN RECEPTOR BASADO EN EL ESTÁNDAR IEEE 802.11a
113
De la respuesta del filtro polifásico real podemos deducir los siguientes parámetros:
Tabla 8. 3: Características del filtro polifásico con transconductores de Nauta.
Ancho de banda ≈ 13,33MHz
Rechazo de banda De -25dB a 40MHz
Frecuencia central ≈ 18MHz
Tipo de filtro Butterworth
Como se puede observar, los resultados obtenidos se acercan bastante a los
objetivos iniciales. Como veremos en el apartado 8.3, una mejora de las prestaciones
pasaría por modificar el número de polos del filtro lo cual implica un aumento de la
complejidad del mismo con el consecuente aumento del consumo. Otra opción consiste en
rediseñar el filtro atendiendo a la variación esperada de las prestaciones finales con
respecto a las teóricas. En este caso, habría que hacer el layout del mismo para tener en
cuenta también los efectos de la implementación física en las prestaciones finales.
Uno de los logros obtenidos en el diseño es la optimización del transconductor de
Nauta, ya que conseguimos bajar la corriente sin perder la ganancia ni el ancho de banda
necesarios para nuestro filtro (capítulo 5), es decir, logramos disminuir el consumo de
potencia del filtro polifásico.
Hasta donde nosotros conocemos en la literatura consultada no hay ningún filtro
polifásico con nuestras especificaciones exactas. De cualquier modo, dedicaremos el
siguiente apartado para comparar nuestro filtro con otros diseños similares a éste.
8.2. Comparación con otros filtros polifásicos Las comparaciones se harán con diseños que nos han servido para la creación de
nuestro proyecto. En la Tabla 8.4 se muestran las principales características de los mismos.
© D
el d
ocum
ento
, de
los a
utor
es. D
igita
lizac
ión
real
izad
a po
r ULP
GC
. Bib
liote
ca u
nive
rsita
ria, 2
011

CONCLUSIÓN
114
Tabla 8. 4: Comparación de nuestro diseño con otros filtros polifásicos.
FILTRO
POLIFÁSICO Tecnología
Vdd
(V)
Corriente
(mA)
Frecuencia
Central
Ancho
de
banda
Tipo de filtro
Orden
del filtro
paso
bajo
ESTE
PROYECTO
0,35µm
SiGe
CMOS
3,3 14,348 18MHz 13MHz Butterworth 5
PIETRO
ANDREANI
[5]
0,35µm
CMOS 2,3 3.2 3MHz 1MHz Butterworth 7
EDGAR
SÁNCHEZ-
SINENCIO
[14]
0,35µm
CMOS 2,7 4,7 2MHz 1MHz Butterworth 6
CHUNG-YUN
CHOU [17]
0,25µm
CMOS 2,5 4,4 18MHz 24MHz -- --
El diseño creado por Pietro Andreani [5], es un filtro polifásico gm-C empleado
para un receptor Bluetooth de corto alcance. Para ello, usó un filtro de Butterworth de 5º
orden y le añadió una etapa notch, (etapa que aumenta la atenuación en la banda de
rechazo), la cual introdujo dos polos más, es decir, el filtro paso bajo usado para el diseño
es de orden 7.
Figura 8. 5: Filtro paso bajo prototipo junto con la etapa notch (a la derecha de la imagen).
Al añadirle esta etapa los autores consiguieron una atenuación de la banda imagen
de más de 53dB.
Para el diseño del filtro polifásico se usaron transconductores de Nauta similares al
empleado por nosotros, cuyos inversores tienen una longitud del canal de 7µm, mientras
que el resto de parámetros se obtienen aplicando la siguiente condición para reducir el
consumo de potencia:
© D
el d
ocum
ento
, de
los a
utor
es. D
igita
lizac
ión
real
izad
a po
r ULP
GC
. Bib
liote
ca u
nive
rsita
ria, 2
011

DISEÑO DE UN FILTRO POLIFÁSICO ACTIVO PARA UN RECEPTOR BASADO EN EL ESTÁNDAR IEEE 802.11a
115
inout gmgm ·6,0=
donde ingm se refiere a la transconductancia generada por los inversores I1 e I2 (Figura
5.1), y la outgm a la transconductancia del resto (I3, I4, I5 e I6).
En nuestro filtro polifásico el transconductor de Nauta se diseña de forma diferente,
ya que fijamos la corriente por cada inversor y no distinguimos entre los de entrada y los
de salida.
Una de las características que nos explica Pietro Andreani en [5], es que el filtro
polifásico consumirá más corriente cuanto mayor sea su frecuencia central, por lo que es
lógico que su diseño, aún teniendo más transconductores que el nuestro, consuma menos
(3,2mA).
El diseño realizado por Edgar Sánchez-Sinencio [14], se basa en un filtro polifásico
para Bluetooth con frecuencia variable. Para este diseño se emplea un filtro paso bajo
Butterworth de sexto orden. El filtro paso bajo se implementó usando tres filtros de 2º
orden como el mostrado en la Figura 8. 6 y los amplificadores de transconductancia
utilizados fueron implementados específicamente para este trabajo. A pesar de utilizar una
estructura y unos transconductores diferentes, las prestaciones conseguidas se parecen a las
de Andreani.
Figura 8. 6: Implementación de un filtro paso bajo activo con OTA-C.
© D
el d
ocum
ento
, de
los a
utor
es. D
igita
lizac
ión
real
izad
a po
r ULP
GC
. Bib
liote
ca u
nive
rsita
ria, 2
011
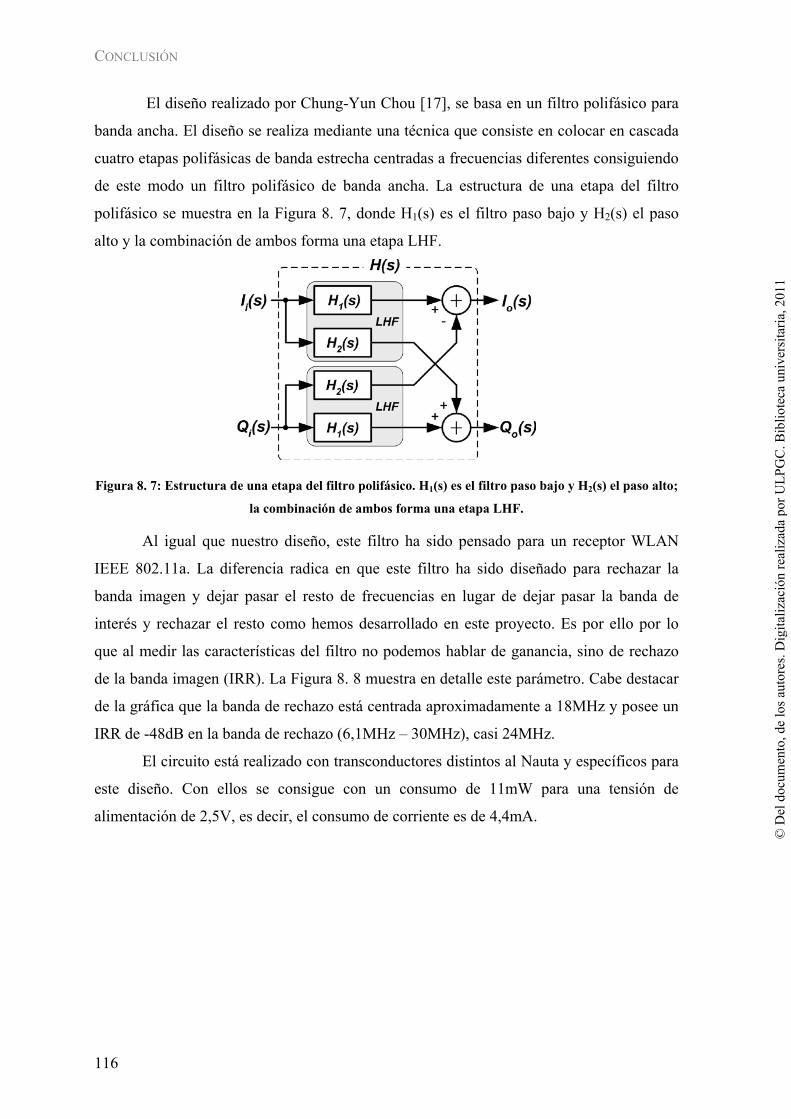
CONCLUSIÓN
116
El diseño realizado por Chung-Yun Chou [17], se basa en un filtro polifásico para
banda ancha. El diseño se realiza mediante una técnica que consiste en colocar en cascada
cuatro etapas polifásicas de banda estrecha centradas a frecuencias diferentes consiguiendo
de este modo un filtro polifásico de banda ancha. La estructura de una etapa del filtro
polifásico se muestra en la Figura 8. 7, donde H1(s) es el filtro paso bajo y H2(s) el paso
alto y la combinación de ambos forma una etapa LHF.
Figura 8. 7: Estructura de una etapa del filtro polifásico. H1(s) es el filtro paso bajo y H2(s) el paso alto;
la combinación de ambos forma una etapa LHF.
Al igual que nuestro diseño, este filtro ha sido pensado para un receptor WLAN
IEEE 802.11a. La diferencia radica en que este filtro ha sido diseñado para rechazar la
banda imagen y dejar pasar el resto de frecuencias en lugar de dejar pasar la banda de
interés y rechazar el resto como hemos desarrollado en este proyecto. Es por ello por lo
que al medir las características del filtro no podemos hablar de ganancia, sino de rechazo
de la banda imagen (IRR). La Figura 8. 8 muestra en detalle este parámetro. Cabe destacar
de la gráfica que la banda de rechazo está centrada aproximadamente a 18MHz y posee un
IRR de -48dB en la banda de rechazo (6,1MHz – 30MHz), casi 24MHz.
El circuito está realizado con transconductores distintos al Nauta y específicos para
este diseño. Con ellos se consigue con un consumo de 11mW para una tensión de
alimentación de 2,5V, es decir, el consumo de corriente es de 4,4mA.
© D
el d
ocum
ento
, de
los a
utor
es. D
igita
lizac
ión
real
izad
a po
r ULP
GC
. Bib
liote
ca u
nive
rsita
ria, 2
011

DISEÑO DE UN FILTRO POLIFÁSICO ACTIVO PARA UN RECEPTOR BASADO EN EL ESTÁNDAR IEEE 802.11a
117
Figura 8. 8: IRR medido del filtro polifásico de cuatro etapas polifásicas.
8.3. Líneas futuras Nuestro diseño puede ser objeto de distintos trabajos futuros, de todos ellos
hablaremos en los siguientes párrafos de los de más fácil o inmediata aplicación.
Uno de ellos es la fabricación del filtro polifásico. Para ello es necesario desarrollar
etapas previas como la creación del layout y realizar las simulaciones post-layout,
pudiendo compararlas con las obtenidas en el esquemático. Una vez conseguidos
resultados satisfactorios, se mandaría a fabricar y, posteriormente, haríamos las medidas
oportunas para comprobar las prestaciones reales del circuito.
Como hemos visto en la introducción, nuestro diseño pertenece a un sistema de
recepción de señal de radiofrecuencia, por tanto, otro de los objetivos que podrá llevarse a
cabo es colocar el filtro en su lugar dentro del receptor y verificar que la recepción de la
señal es correcta cuando pasa por el sistema de recepción completo.
Otro de los objetivos que queda por exponer es la mejora de las prestaciones del
diseño. Observando la Tabla 8. 4, podemos intuir que las prestaciones mejorarán si usamos
otra tecnología más moderna que la usada en nuestro diseño.
Un cambio que ayudaría también a mejorar las prestaciones sería variar el orden del
filtro [2]. Si este es menor tendremos un filtro polifásico sencillo, con menor consumo,
debido a los pocos transconductores, pero sin garantizar el ancho de banda, ni la ganancia
previstas.
© D
el d
ocum
ento
, de
los a
utor
es. D
igita
lizac
ión
real
izad
a po
r ULP
GC
. Bib
liote
ca u
nive
rsita
ria, 2
011

CONCLUSIÓN
118
Por otro lado si el orden del filtro es mayor se podrá obtener una mejor ganancia,
una salida más parecida a la del filtro polifásico ideal y un buen ancho de banda, pero
añadirá más complejidad al esquemático del filtro que, ya de por sí, no es nada trivial.
Además aumentará considerablemente el consumo de potencia debido al aumento del
número de transconductores.
Quizá, una buena solución para mejorar las prestaciones del diseño es, a la hora de
implementar el ladder, colocarle una etapa de rechazo de banda (etapa notch). Es decir, se
le añade al filtro paso bajo prototipo una etapa de atenuación fuera de la banda de paso, la
cual hace que la banda de transición caiga más rápidamente [5].
Otra alternativa consiste en diseñar de nuevo el filtro paso bajo prototipo
conociendo de ante mano las carencias del filtro polifásico, como puede ser su menor
ancho de banda con respecto al filtro paso bajo prototipo o el desplazamiento de la
frecuencia central. A partir de estos parámetros podremos diseñar un filtro con mayor
ancho de banda (por ejemplo 25MHz), una frecuencia central superior (22MHz) y,
añadiendo un transconductor más en paralelo a las fuentes de corriente de la entrada del
filtro paso bajo, una ganancia mayor. Si elegimos esta alternativa, debería hacerse primero
el layout para así tener en cuenta sus efectos en las prestaciones finales.
© D
el d
ocum
ento
, de
los a
utor
es. D
igita
lizac
ión
real
izad
a po
r ULP
GC
. Bib
liote
ca u
nive
rsita
ria, 2
011

119
7865 ×+×= HeHnH
Capítulo 9 Presupuesto
Una vez completado el diseño del circuito y comprobado su correcto
funcionamiento, para concluir con el estudio, en este capítulo se realizará un análisis
económico con los costes tanto parciales como totales del proyecto.
9.1. Baremos utilizados
El cálculo del presupuesto de este proyecto se ha seguido según la “Propuesta de
baremos orientativos para el cálculo de honorarios” establecida por el Colegio Oficial
de Ingenieros Técnicos de Telecomunicación a partir de 1-01-2006.
Esta propuesta establece que para “Trabajos tarifados por tiempo empleado” se
aplique la siguiente ecuación:
© D
el d
ocum
ento
, de
los a
utor
es. D
igita
lizac
ión
real
izad
a po
r ULP
GC
. Bib
liote
ca u
nive
rsita
ria, 2
011

PRESUPUESTO
120
donde:
- H = Honorarios a percibir.
- Hn = Horas contabilizadas en jornada normal.
- He = Horas contabilizadas fuera de la jornada normal de trabajo.
Los honorarios que se obtengan por la aplicación de la clave “H” se reducirán a
medida que aumente el número de horas, a cuyo efecto serán multiplicados por los
coeficientes reductores con arreglo a lo detallado en la Tabla 9. 1.
Tabla 9. 1: Coeficientes reductores.
HORAS COEFICIENTE
Hasta 36 C=1
Exceso de 36 hasta 72 horas C=0,90
Exceso de 72 hasta 108 horas C=0,80
Exceso de 108 hasta 144 horas C=0,70
Exceso de 144 hasta 180 horas C=0,65
Exceso de 180 hasta 360 horas C=0,60
Exceso de 360 hasta 510 horas C=0,55
Exceso de 510 hasta 720 horas C=0,50
Exceso de 720 hasta 1080 horas C=0,45
Exceso de 1080 C=0,40
9.2. Cálculo del presupuesto
9.2.1. Costes debido a los recursos humanos
En este apartado se incluyen los honorarios a recibir por el ingeniero técnico en el
desarrollo del proyecto en función de las horas de trabajo que se ha empleado en la
realización del mismo.
En concreto para este proyecto, en la Tabla 9. 2 establecemos unos valores
indicativos del tiempo parcial empleado en cada fase del mismo.
© D
el d
ocum
ento
, de
los a
utor
es. D
igita
lizac
ión
real
izad
a po
r ULP
GC
. Bib
liote
ca u
nive
rsita
ria, 2
011

DISEÑO DE UN FILTRO POLIFÁSICO ACTIVO PARA UN RECEPTOR BASADO EN EL ESTÁNDAR IEEE 802.11a
121
Tabla 9. 2: Tiempo empleado.
DESCRIPCIÓN DEL TIEMPO PARCIAL (HORAS)
Búsqueda y estudio de la documentación 100
Estudio de la herramienta de diseño 60
Análisis y diseño del circuito 1040
Realización de la memoria 150
En definitiva, se necesitaron un total de 1350 horas para la realización de este
proyecto, consideradas en su totalidad del tipo de jornada normal, con lo que el cálculo
“H” resulta:
87750651350 =×=H
Aplicando los coeficientes correctivos, dados por el COITT, a los tramos
correspondientes resultan unos honorarios de:
€100.3540,087750 =×=H
9.2.2. Costes de amortización de los equipos informáticos y herramientas software
A continuación se detallan, en las Tablas 9. 3 y 9. 4, los costes relacionados a la
utilización de equipos y herramientas software empleados en la elaboración del presente
proyecto. Los costes están divididos entre el número de usuarios que acceden a ellos,
estimándose en 50 usuarios.
Tabla 9. 3: Costes debidos a la utilización de herramientas software.
COSTE ANUAL (€) DESCRIPCIÓN
TIEMPO DE
USO (MESES) TOTAL USUARIO TOTAL
Entorno y diseño de
simulación Advanced Design
System. Amortización 3 años
12 2.208,11 44.162 44,16
Mantenimiento 12 1.445,31 28,90 28,90
Entorno Windows NT 12 306,21 6,12 6,12
Microsoft Office 2000 12 448,95 8,97 8,97
COSTES DE HERRAMIENTAS
SOFTWARE TOTAL 106,21
© D
el d
ocum
ento
, de
los a
utor
es. D
igita
lizac
ión
real
izad
a po
r ULP
GC
. Bib
liote
ca u
nive
rsita
ria, 2
011
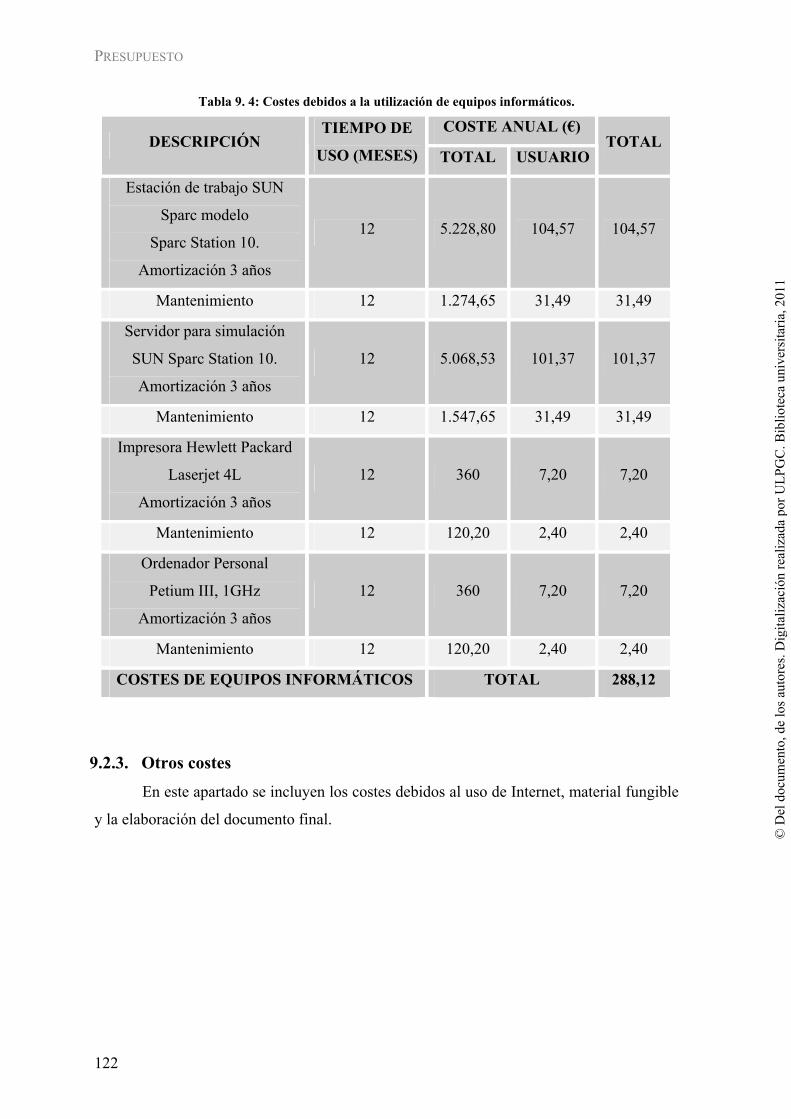
PRESUPUESTO
122
Tabla 9. 4: Costes debidos a la utilización de equipos informáticos.
COSTE ANUAL (€) DESCRIPCIÓN
TIEMPO DE
USO (MESES) TOTAL USUARIO TOTAL
Estación de trabajo SUN
Sparc modelo
Sparc Station 10.
Amortización 3 años
12 5.228,80 104,57 104,57
Mantenimiento 12 1.274,65 31,49 31,49
Servidor para simulación
SUN Sparc Station 10.
Amortización 3 años
12 5.068,53 101,37 101,37
Mantenimiento 12 1.547,65 31,49 31,49
Impresora Hewlett Packard
Laserjet 4L
Amortización 3 años
12 360 7,20 7,20
Mantenimiento 12 120,20 2,40 2,40
Ordenador Personal
Petium III, 1GHz
Amortización 3 años
12 360 7,20 7,20
Mantenimiento 12 120,20 2,40 2,40
COSTES DE EQUIPOS INFORMÁTICOS TOTAL 288,12
9.2.3. Otros costes
En este apartado se incluyen los costes debidos al uso de Internet, material fungible
y la elaboración del documento final.
© D
el d
ocum
ento
, de
los a
utor
es. D
igita
lizac
ión
real
izad
a po
r ULP
GC
. Bib
liote
ca u
nive
rsita
ria, 2
011

DISEÑO DE UN FILTRO POLIFÁSICO ACTIVO PARA UN RECEPTOR BASADO EN EL ESTÁNDAR IEEE 802.11a
123
Tabla 9. 5: Otros costes.
DESCRIPCIÓN Nº DE
UNIDADES
COSTE
UNIDAD
TOTAL
(€)
Horas de uso de Internet 200 1,13€/hora 226
Paquete de 500 folios DIN_A4
100gr/m2 1 10€ 10
Fotocopias 500 0,04€ 20
Otros 75
OTROS COSTES TOTAL 331
9.2.4. Presupuesto total
Para finalizar en la siguiente tabla se recoge el coste total del proyecto en función
de los costes parciales comentados en las secciones anteriores.
Tabla 9. 6: Presupuesto total.
COSTES TOTAL (€)
Costes de recursos humanos 35.100
Costes de herramientas software 106,21
Costes de equipos informáticos 288,12
Otros costes 331
Subtotal 35.494,33
IGIC (5%) 1.774,72
PREUPUESTO TOTAL 37.269,05
© D
el d
ocum
ento
, de
los a
utor
es. D
igita
lizac
ión
real
izad
a po
r ULP
GC
. Bib
liote
ca u
nive
rsita
ria, 2
011

PRESUPUESTO
124
Dña. Dolores Tamara Delgado Alemán declara que el proyecto “Diseño de un filtro
polifásico activo en tecnología SiGe 0.35 µm para un receptor basado en el estándar IEEE
802.11a” asciende a un total de treinta y siete mil doscientos sesenta y nueve con cero
cinco euros.
Fdo. DNI:78498177-M
Las Palmas de Gran Canaria, a ……de .…………de 2006.
© D
el d
ocum
ento
, de
los a
utor
es. D
igita
lizac
ión
real
izad
a po
r ULP
GC
. Bib
liote
ca u
nive
rsita
ria, 2
011

127
Anexo
© D
el d
ocum
ento
, de
los a
utor
es. D
igita
lizac
ión
real
izad
a po
r ULP
GC
. Bib
liote
ca u
nive
rsita
ria, 2
011
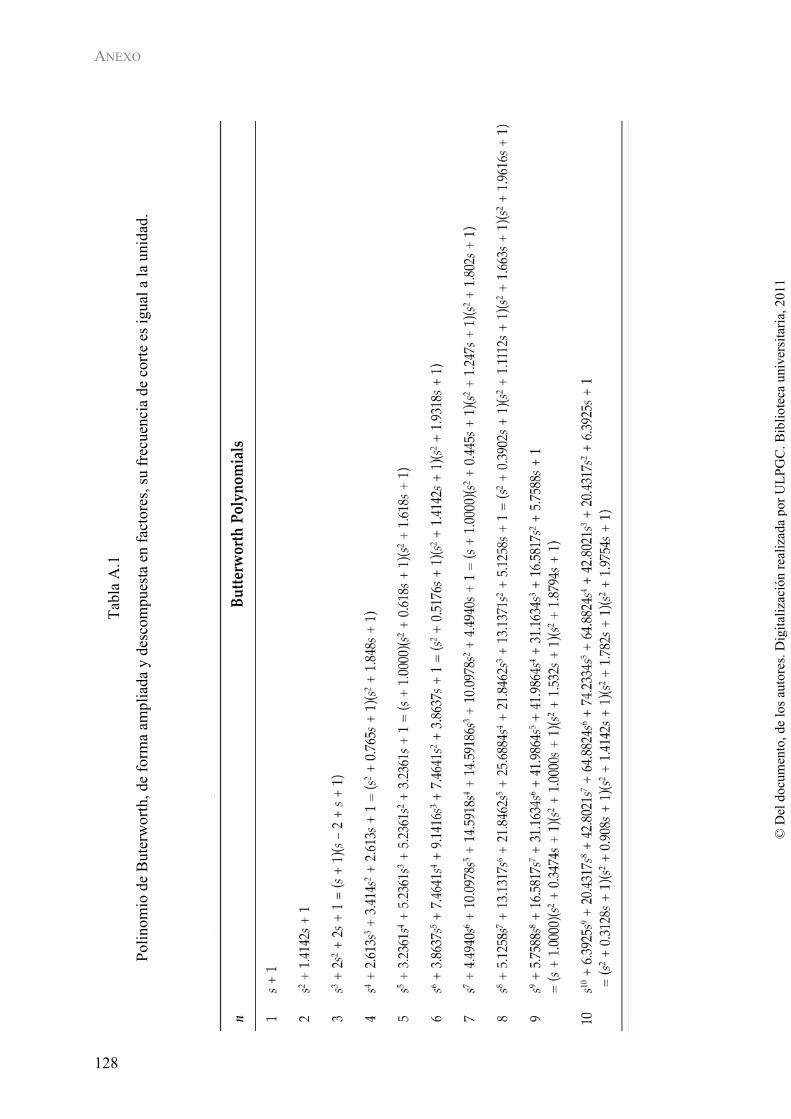
ANEXO
128
Tabl
a A
.1
Polin
omio
de
But
erw
orth
, de
form
a am
plia
da y
des
com
pues
ta e
n fa
ctor
es, s
u fr
ecue
ncia
de
corte
es i
gual
a la
uni
dad.
© D
el d
ocum
ento
, de
los a
utor
es. D
igita
lizac
ión
real
izad
a po
r ULP
GC
. Bib
liote
ca u
nive
rsita
ria, 2
011

DISEÑO DE UN FILTRO POLIFÁSICO ACTIVO PARA UN RECEPTOR BASADO EN EL ESTÁNDAR IEEE 802.11a
129
Tabl
a A
.2
Polin
omio
del
den
omin
ador
de
form
a am
plia
da y
des
com
pues
ta e
n fa
ctor
es p
ara
los f
iltro
s Che
bysh
ev d
e or
den
impa
r.
© D
el d
ocum
ento
, de
los a
utor
es. D
igita
lizac
ión
real
izad
a po
r ULP
GC
. Bib
liote
ca u
nive
rsita
ria, 2
011

ANEXO
130
Tabl
a A
.2
(Con
tinua
ción
)
© D
el d
ocum
ento
, de
los a
utor
es. D
igita
lizac
ión
real
izad
a po
r ULP
GC
. Bib
liote
ca u
nive
rsita
ria, 2
011

DISEÑO DE UN FILTRO POLIFÁSICO ACTIVO PARA UN RECEPTOR BASADO EN EL ESTÁNDAR IEEE 802.11a
131
Tabl
a A
.3
Func
ione
s de
apro
xim
ació
n de
l filt
ro e
líptic
o pa
ra A
máx
= 0
,5 d
B.
© D
el d
ocum
ento
, de
los a
utor
es. D
igita
lizac
ión
real
izad
a po
r ULP
GC
. Bib
liote
ca u
nive
rsita
ria, 2
011

© D
el d
ocum
ento
, de
los a
utor
es. D
igita
lizac
ión
real
izad
a po
r ULP
GC
. Bib
liote
ca u
nive
rsita
ria, 2
011

133
Bibliografía
© D
el d
ocum
ento
, de
los a
utor
es. D
igita
lizac
ión
real
izad
a po
r ULP
GC
. Bib
liote
ca u
nive
rsita
ria, 2
011

BIBLIOGRAFÍA
134
[1] T. Kugelstadt, “Active Filter Design Techniques” Texas Instruments SLOD006A,
disponible en http://www-s.ti.com/sc/psheets/sloa088/sloa088.pdf.
[2] R. Schaumann and M.E.V. Vlakenburg, “Design of Analog Filters” Oxford
University Press, 2001.
[3] Deliyannis, Theodore L., Yichuang Sun and J. Kel Fidler “Continuous-Time Active
Filter Design” Boca Raton: CRC Press LLC, 1999.
[4] R. L. Geiger and E. Sánchez-Sinencio, "Active Filter Design Using Operational
Transconductance Amplifiers: A Tutorial," IEEE Circuits and Devices Magazine,
Vol. 1, pp.20-32, March 1985.
[5] P. Andreani, S. Mattisson and B. Essink “A COMS gm-C Polyphase Filter with High
Image Rjection”. In Proc. Custom Integrated Circuit Conference 2001.
[6] E. Sánchez-Sinencio and J. Silva-Martinez, “CMOS transconductance amplifiers,
architectures and active filters: a tutorial”, IEE Proc.-Circuits Devices Syst., Vol.
147, No. 1, February 2000.
[7] B. Nauta. “A CMOS Transconductance-C Filter Technique for Very High
Frequencies”. IEEE Journal of Solid State Circuits, Vol. 27, NO. 2, pp. 142-153,
February 1992.
[8] Sanduleanu, Mihai Adrian Tiberiu “Power accuracy and noise aspects in CMOS
mixel-signal design”. “Gm-C integrators for low-power and low voltage applications.
A gaussian polyphase filter for mobile transceivers in 0.35 m m CMOS”. Disponible
en http://www.edacafe.com/books/phdThesis/Chapter-4.5.php
[9] Advanced Design System, http://eesof.tm.agilent.com/.
[10] Design an L-C Low pass or High pass Filter,
http://www.wa4dsy.net/filter/hp_lp_filter.html
[11] Tony Fisher's , LC Filter Design, http://www-users.cs.york.ac.uk/~fisher/lcfilter/.
[12] Circuit Sage, Filter Design and Analysis http://www.circuitsage.com/filter/ladder.zip.
[13] Behzad Razavi, “Design of Analog CMOS Integrated Circuits”, The McGraw-Hill
Companies, 2000.
[14] AMS, Austria Micro Systems,“0.35 µm BiCMOS Process Parameters,” Rev.1.0.
2002.
[15] AMS, Austria Micro Systems,“0.35 µm BiCMOS Process Parameters,” Rev.2.0.
2003.
© D
el d
ocum
ento
, de
los a
utor
es. D
igita
lizac
ión
real
izad
a po
r ULP
GC
. Bib
liote
ca u
nive
rsita
ria, 2
011

DISEÑO DE UN FILTRO POLIFÁSICO ACTIVO PARA UN RECEPTOR BASADO EN EL ESTÁNDAR IEEE 802.11a
135
[16] Ahmed A. Emira and E. Sánchez-Sinencio, “A pseudo differential complex filter for
Bluetooth with frequency tuning”, IEEE Transactions on circuits and system-Analog
and digital signal processing, Vol. 50, No. 10, February 2003.
[17] Chung – Yun Chou and Chung – Yun Wu “The design of Wideband and Low-
Power CMOS active polyphase filter and its application in RF Double – Quadrature
receivers”, IEEE Transactions on circuits and system, Vol. 52, No. 5, May 2005.
© D
el d
ocum
ento
, de
los a
utor
es. D
igita
lizac
ión
real
izad
a po
r ULP
GC
. Bib
liote
ca u
nive
rsita
ria, 2
011