unidad automatica de falla de linea dkg-309-can …control externo de la unidad 6.18. ejercitador...
TRANSCRIPT

Manual de Usuario DKG-309-CAN-MPU V-24 (25.08.2010)(21.02.2012)
Tel: +90-216-466 84 60 Fax: +90-216 364 65 65 [email protected] http://www.datakom.com.tr
UNIDAD AUTOMATICA DE FALLA DE LINEA DKG-309-CAN CON PUERTO J1939
CARACTERISTICAS
Control y monitoreo deECU mediante J1939 CAN
Advertencias de ECU J1939 mostradas como texto Varias marcas y modelos de motor disponibles
Falla de línea Automatica
Control de motor
Protección de Generador
Alarmas y Advertencias integradas Operación de plantas en paralelo Recorte de carga,carga muerta
Soporte de motor a Gas Control de velocidad minima de motor Entradas trifásicas de voltaje de línea Entradas trifásicas de voltaje de planta Entradas trifásicas de corriente de planta (Tc) Medición de presión de aceite Medición de Tenperatura del refrigerante Medición de nivel de combustible Medición de Potencia Activa de Planta Medición de Factor de Potencia de planta Tacómetro Indicador de mantenimiento periódico requerido Ejercitador Diario / semanal / mensual Horímetro de motor Registro de Eventos con estampa de fecha-hora y mediciones completas Guarda últimos 200 eventos Contadores Estadisticos Reloj en tiempo real con soporte de batería Programas de tabla de operación semanal Protección con contraseña de 3 niveles Parámetros Programables Parámetros ajustables en campo Habilitación para retorno a ajustes de fábrica
Puerto serial RS-232 Puerto RS-485 opcional Firmware descargable desde el puerto serial Monitoreo remoto gratuito en ambiente MS-Windows SW: -conexión local y de módem -monitoreo, descarga de parámetros -networking vía modems Soporte de módemGSM y PSTN Envío de mensaje GSM-SMS en caso de alarma Llamada a Modem en caso de alarma Comunicación via MODBUS Pantalla LCD gráfica de128x64 Soporte trilingüe Capacidad de desplegar logo del cliente Entradas análogas configurables: 3 Entradas digitales configurables: 7 Salidas digitales configurables: 2 Salidas digitales totales: 6 Capacidad de expansión de salidas Arranque remoto disponible Entrada de simulacion de línea Control de velocidad mínima de motor Soporta caídas de voltaje al arranque Panel frontal sellado Sistema de conexión vía plug para fácil reemplazo Dimensiones (190x135x48mm)

Manual de Usuario DKG-309-CAN-MPU V-24 (25.08.2010)(21.02.2012)
- 2 -
CONTENIDO
Sección 1. INSTALACION
1.1. Introducción al Panel de Control
1.2. Montaje de la Unidad 1.3. Cableado de la Unidad
2. ENTRADAS Y SALIDAS 3. INDICADORES
3.1. Indicadores Led 3.2. Selección de idioma 3.3. Pantallas Digitales
4. ALARMAS Y ADVERTENCIAS 5. MODOS DE OPERACION 6. OTRAS CARACTERISTICAS 6.1. Arranque Remoto 6.2. Selección de tipo de enviador 6.3. Calentamiento de motor 6.4. Velocidad minima de motor (ralentí) 6.5. Precalentador de motor 6.6. Control de Bomba de Combustible 6.7. Simulación de Línea (Arranque deshabilitado) 6.8. Simulación retardada de línea, carga de baterías 6.9. Operación dual alternada de plantas 6.10. Indicador deServicio Requerido 6.11. Horímetro de motor 6.12. Mostrar Fecha-Hora 6.13. Mostrar Versión de Programa 6.14. Conexión de Módem 6.15. Envío de mensaje SMS 6.16. Monitoreo y Programación Remotos 6.17. Control externo de la Unidad 6.18. Ejercitador Automático 6.19. Restablecimiento a parámetros de fábrica 6.20. Control de válvula solenoide para motores a gas 6.21. Recorte de carga/carga muerta 6.22. Robo de Combustible / Mensajes de combustible
6.23. Actualización de Firmware 6.24. Cambio de velocidad por default en Motores Volvo
6.25. Modo de Control de Motor 6.26. Voltaje y Frecuencia dual
6.27. Operación monofásica 7. PUERTO DE MONITOREO Y CONTROL J1939 8. COMUNICACION VIA MODBUS 9. TABLA DE OPERACION SEMANAL 10. REGISTRO DE EVENTOS 11. CONTADORES ESTADISTICOS 12. MANTENIMIENTO 13. PROGRAMACION 14. LOCALIZACION DE FALLAS 15. DECLARACION DE CONFORMIDAD 16. ESPECIFICACIONES TECNICAS 17. DIAGRAMA DE CONEXIONES

Manual de Usuario DKG-309-CAN-MPU V-24 (25.08.2010)(21.02.2012)
- 3 -
1. INSTALACION
1.1 Introducción al Panel de Control
La unidad es un Panel de control y protección usado en plantas. Muestra los valores medidos
en su pantalla. Está diseñada para ser amigable tanto para el instalador como para el usuario.
Usualmente no es necesaria la programación, debido a que los ajustes de fábrica han sido
cuidadosamente seleccionados para la mayoría de las aplicaciones. Sin embargo la programación en
campo permite el control total del grupo electrógeno. Los parámetros programados son guardados en
una Memoria no volátil por lo que toda la información permanence aún en el caso de ausencia total de
energía.
Los parámetros medidos son:
Voltaje fase L1 a neutro Línea
Voltaje fase L2 a neutro Línea
Voltaje fase L3 a neutro Línea
Voltaje fase L1-L2 Línea
Voltaje fase L2-L3 Línea
Voltaje fase L3-L1 Línea
Voltaje fase L1 a neutro Generador
Voltaje fase L2 a neutro Generador
Voltaje fase L3 a neutro Generador
Voltaje fases L1-L2 Generaador
Voltaje fases L2-L3 Generador
Voltaje fases L3-L1 Generador
Corriente fase L1 Generador
Corriente fase L2 Generador
Corriente fase L3 Generador
Frecuencia del Generador
Revoluciones del motor (rpm)
KW fase L1 Generador
KW fase L2 Generador
KW fase L3 Generador
KW Totales del Generador
F.P. fase L1 Generador
F.P. fase L2 Generador
F.P. fase L3 Generador
F.P. total de Generador
Voltaje de Batería
Temperatura del Refrigerante
Presión de aceite
Nivel de combustible
Frecuencia de Generador
Frecuencia de Línea

Manual de Usuario DKG-309-CAN-MPU V-24 (25.08.2010)(21.02.2012)
- 4 -
1.2 Montaje de la Unidad
La unidad está diseñada para montaje en gabinete. El usuario solo debe tener acceso al
panel frontal manteniendo las conexiones cubiertas dentro del gabinete.
Monte la unidad en una superficie plana y vertical. Antes del montaje, remueva los retenes y
conectores de la unidad, luego pase la unidad a través de la ventana. La unidad debe quedar sujeta en
su posición mediante los retenes de tornillo.
El cuerpo del motor debe estar aterrizado para operación adecuada de la unidad, de lo contrario pueden ocurrir mediciones incorrectas de voltaje y frecuencia.
La salida de los transformadores de corriente deberá ser de 5 Amperes. La relación de corriente
de los transformadores debe seleccionarse según se requiera (entre 10/5 y 9000/5 amps). Las salidas de
los transformadores de corriente deben conectarse con pares de cable independientes para cada
transformador a su entrada respectiva. Nunca use terminales comunes ni aterrice. La potencia del
transformador debe ser de al menos 5 VA. Se recomienda usar transformadores con 1% de precisión.
Si se conectan a la unidad sensores análogos ( temperatura, presión de aceite ó nivel de
combustible), no será posible conectar simultáneamente a ellos ningún instrumento medidor, de lo
contrario la unidad puede dañarse. Si ya existe un panel de control de planta que cuente con
instrumentos alimentados por enviador, no trate de conectárselos a la unidad. La unidad está
programada de fábrica para enviadotes tipo VDO. Sin embargo se pueden seleccionar diferentes tipos de
enviador via menú de programación. Por favor revise la sección de programación.
Las entradas digitales programmables son compatibles con los tipos de contacto “normalmente
abierto” y “normalmente cerrado”, conectando ya sea a BAT- ó a BAT+.
La Terminal de conexión de carga del alternador provee corriente de excitación al campo, por lo
que no es necesario usar una lámpara de carga externa.
1.3 Cableado de la Unidad
ADVERTENCIA: LA UNIDAD NO TIENE FUSIBLES. Use fusibles externos para las fases de Línea: L1,L2,L3, fases del Generador: L1,L2,L3,y positivo de Batería : BAT(+). Instale los fusibles tan cerca como sea posible a la unidad en lugar de fácil acceso para el usuario. Los fusibles deben ser de 6 Amps.
Manual de Usuario DKG-309-CAN-MPU V-24 (25.08.2010)(21.02.2012)
- 5 -
ADVERTENCIA: LA ELECTRICIDAD PUEDE MATAR
SIEMPRE desenergize ANTES de conectar la unidad.
1) SIEMPRE remueva los plugs cuando inserte cables con el desarmador.
2) Debe proveerse una forma de desconexión accessible y apropiada como
pastillas termomagnéticas como parte de la instalación.
3) La instalación eléctrica del lugar DEBE incorporar respaldo apropiado de
protección de las líneas mediante fusibles ó interruptor termomagnético de alta
capacidad interruptiva (HBC,mínimo de 1500A).
4) Use cables de rango de temperatura y calibre adecuados.(mínimo 18AWG).

Manual de Usuario DKG-309-CAN-MPU V-24 (25.08.2010)(21.02.2012)
- 6 -
2. ENTRADAS Y SALIDAS
PUERTO SERIAL RS-232: Este conector provee datos seriales de entrada y salida para varios
propósitos como monitoreo y programación remotos.
CONECTOR DE EXTENSION: Este conector sirve para la conexión al módulo de extensión de salidas.
El módulo de extensión de relevadores opcional provee 8 salidas programables de relevador de 16A. La
unidad permite el uso de hasta 2 módulos de extensión I/O.
Term. Función DatosTécnicos Descripción
1 TRANSFERENCIA A
GENERADOR
Salida de relevador,
16A-AC
Esta salida provee energía para transferir al
generador. Si las fases del generador no
tienen valores aceptables de voltaje ó
frecuencia, esta salida será desenergizada.
Para proveer seguridad adicional, el contacto
normalmente cerrado del contactor de línea
debe estar conectado en serie con esta
salida.
2 GEN-L1 Entradas de fases de
Generador, 0-300V-
AC
Conecte las fases de generador a estas
entradas. Los límites alto y bajo de voltaje de
generador son programables. 3 GEN-L2
4 GEN-L3
5 NEUTRO GENERADOR Entrada, 0-V-AC Terminal neutral para fases del generador.
6 NEUTRO LINEA Entrada, 0-V-AC Terminal neutral para fases de línea.
7 LINEA-L3 Entradas de fases de
línea, 0-300V-AC
Conecte las fases de línea a estas entradas.
Los límites alto y bajo de voltaje de línea son
programables.
8 LINEA-L2
9 LINEA-L1
10 TRANSFERENCIA A LINEA Salida de Relevador,
16A-AC
Esta salida provee energía para transferir a
línea. Si las fases de línea no tienen voltajes
aceptables, esta salida será desenergizada.
Para proveer seguridad adicional, el contacto
normalmente cerrado del contactor del
generador debe estar conectado en serie con
esta salida.
11 TIERRA(NEG. DE BATERIA) O VDC Conexión negativa de la fuente (batería).
12 POSITIVO DE BATERIA +12 ó 24VDC La terminal positiva de la batería del motor
debe conectarse a este punto. La unidad
opera tanto en sistemas a 12V como a 24V.
13 ENVIADOR DE NIVEL DE
COMBUSTIBLE
Entrada,0-5000 ohms Conexión Analoga del enviador de nivel de
combustible. No conecte el enviador a otros
aparatos. La entrada tiene ohms
programables para enviadores VDO.
14 ENVIADOR DE PRESION DE
ACEITE
Entrada,0-5000 ohms Conexión Analoga del enviador de presión de
aceite. No conecte el enviador a otros
aparatos. La entrada tiene características
programables y se conecta a cualquier tipo de
enviador.
15 ENVIADOR DE TEMP. DE
REFRIGERANTE
Entrada,0-5000 ohms Conexión Analoga del enviador de
temperatura del motor. No conecte el enviador
a otros aparatos. La entrada tiene
características programables y se conecta a
cualquier tipo de enviador.
Manual de Usuario DKG-309-CAN-MPU V-24 (25.08.2010)(21.02.2012)
- 7 -
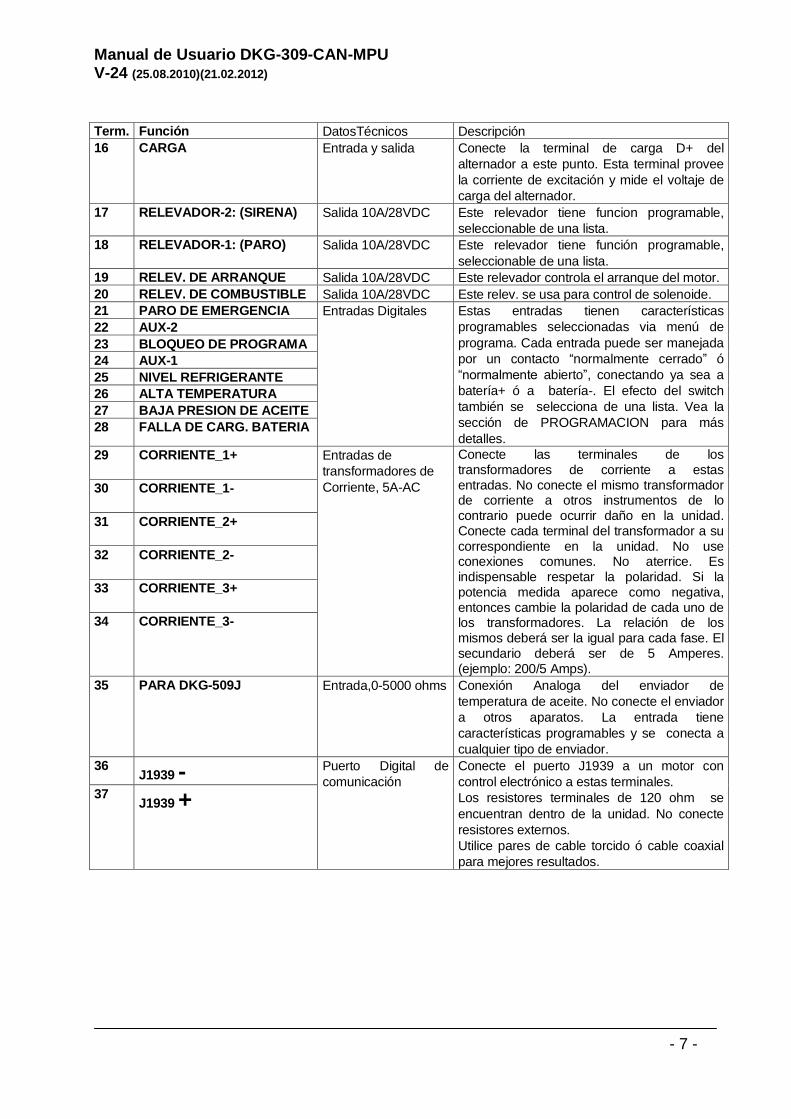
Term. Función DatosTécnicos Descripción
16 CARGA Entrada y salida Conecte la terminal de carga D+ del
alternador a este punto. Esta terminal provee
la corriente de excitación y mide el voltaje de
carga del alternador.
17 RELEVADOR-2: (SIRENA) Salida 10A/28VDC Este relevador tiene funcion programable,
seleccionable de una lista.
18 RELEVADOR-1: (PARO) Salida 10A/28VDC Este relevador tiene función programable,
seleccionable de una lista.
19 RELEV. DE ARRANQUE Salida 10A/28VDC Este relevador controla el arranque del motor.
20 RELEV. DE COMBUSTIBLE Salida 10A/28VDC Este relev. se usa para control de solenoide.
21 PARO DE EMERGENCIA Entradas Digitales Estas entradas tienen características
programables seleccionadas via menú de
programa. Cada entrada puede ser manejada
por un contacto “normalmente cerrado” ó
“normalmente abierto”, conectando ya sea a
batería+ ó a batería-. El efecto del switch
también se selecciona de una lista. Vea la
sección de PROGRAMACION para más
detalles.
22 AUX-2
23 BLOQUEO DE PROGRAMA
24 AUX-1
25 NIVEL REFRIGERANTE
26 ALTA TEMPERATURA
27 BAJA PRESION DE ACEITE
28 FALLA DE CARG. BATERIA
29 CORRIENTE_1+ Entradas de
transformadores de
Corriente, 5A-AC
Conecte las terminales de los transformadores de corriente a estas entradas. No conecte el mismo transformador de corriente a otros instrumentos de lo contrario puede ocurrir daño en la unidad. Conecte cada terminal del transformador a su correspondiente en la unidad. No use conexiones comunes. No aterrice. Es indispensable respetar la polaridad. Si la potencia medida aparece como negativa, entonces cambie la polaridad de cada uno de los transformadores. La relación de los mismos deberá ser la igual para cada fase. El secundario deberá ser de 5 Amperes. (ejemplo: 200/5 Amps).
30 CORRIENTE_1-
31 CORRIENTE_2+
32 CORRIENTE_2-
33 CORRIENTE_3+
34 CORRIENTE_3-
35 PARA DKG-509J Entrada,0-5000 ohms Conexión Analoga del enviador de
temperatura de aceite. No conecte el enviador
a otros aparatos. La entrada tiene
características programables y se conecta a
cualquier tipo de enviador.
36 J1939 -
Puerto Digital de
comunicación
Conecte el puerto J1939 a un motor con
control electrónico a estas terminales.
Los resistores terminales de 120 ohm se
encuentran dentro de la unidad. No conecte
resistores externos.
Utilice pares de cable torcido ó cable coaxial
para mejores resultados.
37 J1939 +

Manual de Usuario DKG-309-CAN-MPU V-24 (25.08.2010)(21.02.2012)
- 8 -
3. INDICADORES
3.1 Indicadores Led
La unidad tiene 12 LEDs, divididos en 3 grupos:
-Grupo_1: Modo de Operación: Este grupo indica la función del grupo electrógeno.
-Grupo_2: Diagrama Mímico: Este grupo indica el estado actual de los voltajes de línea y planta
así como la posición de la transferencia.
-Grupo_3: Advertencias y alarmas: Este grupo indica la existencia de condiciones anormales
encontradas durante la operación.
Función Color Descripción
“MAINS ON” Verde El LED encenderá cuando las 3 fases de línea estén
dentro de los límites de voltaje.
“MAINS OFF” Rojo El LED encenderá cuando al menos una de las fases
de línea salga de los límites de voltaje.
“LOAD MAINS” Verde Enciende cuando se transfiere a línea.
“LOAD GENERATOR” Ambar Enciende cuando se transfiere a planta.
“GENERATOR” Ambar El LED parpadeará cuando el motor opere. Quedará
encendido fijo cuando las 3 fases del generador
estén dentro de los límites de voltaje programados.
“LOAD TEST” Ambar Uno de estos LEDs permanecerá encendido siempre
e indicará cual es el modo de operación
seleccionado.
Si la operación de la planta se deshabilita por la tabla
de operación semanal, entonces el led “AUTO”
parpadeará.
“TEST” Ambar
“OFF” Ambar
“AUTO” Verde
“ALARM” Rojo Si se presenta una condición de falla que provoque el
paro del motor, el led de alarma encenderá fijo. Si
ocurre una condición de bote de carga, este led
parpadeará.Las Alarmas operan en base a primicia.
La presencia de una falla deshabilitará otras de la
misma ó menor prioridad.
“WARNING” Rojo Si se presenta una condición de advertencia, este led
enciende fijo. Las advertencias operan en base a
primicia. La presencia de una advertencia
deshabilitará otras advertencias, sin embargo aún se
permitirán el paro y el bote de carga (carga botada).
“SERVICE REQUEST” Rojo Indicador de mantenimiento preventivo periódico
requerido. Enciende cuando ya transcurrieron las
horas ó el período ajustado.

Manual de Usuario DKG-309-CAN-MPU V-24 (25.08.2010)(21.02.2012)
- 9 -
3.2 Selección de Idioma
La unidad es capaz de mostrar información en 3 idiomas. La selección de idioma se efectúa
mediante el parámetro de programa “CONTROLLER CONFIGURATION > LANGUAGE SELECTION”.
Las selecciones disponibles son:
0: Idioma Inglés
1: Idioma Español
2: Idioma Chino
3: Preguntar selección al energizar
La siguiente pantalla será mostrada al energizar si se seleccionó la opción 3:
Con los botones de flecha Izq. / Arriba / Abajo se seleccionará el idioma de la pantalla. El idioma
será preguntado cada que se energice la unidad.
Con las selecciones 0,1,2 esta pantalla no aparecerá y el idioma selecionado se habilitará.
3.3 Pantalla Digital
La unidad tiene una pantalla gráfica de LCD de 128x64 pixeles. Muestra: -Parámetros Medidos, -El logotipo de la compañía, -La lista de alarmas -Versión de Programa e información de fecha-hora, -Contadores Estadísticos, -Registro de Eventos, -Parámetros programados.
La Navegación entre diferentes pantallas se realiza mediante los botones ◄MENU y
MENU►. Cada depresión del botón MENU► cambia lo mostrado a la siguiente pantalla. Cada
depresión del botón ◄MENU cambia lo mostrado a la pantalla previa.
Durante la operación, la unidad cambiará automaticamente entre diferentes pantallas, mostrando siempre los parámetros más importantes de los estador de operación actuales. Si ocurre una alarma ó advertencia durante la operación, la pantalla cambiará automaticamente a la posición “ALARM LIST” (excepto el modo de programación). Los botones ◄MENU or MENU► no funcionarán. Para habilitar la navegación entre pantallas y silenciar el zumbador interno, presione primero el botón ALARM MUTE . Si hay más de una alarma, la siguiente
será mostrada presionando el botón ▼. Por lo tanto todas las alarmas existentes pueden ser exploradas. Se mostrará la leyenda: ‘END OF ALARM LIST’ cuando ya no hayan más alarmas por mostrar. La pantalla cuenta con retroiluminación. La retroalimentación se encenderá al presionar
cualquier boton ó cuando opere la planta. Se apagará después de 4 horas para economizar energía.

Manual de Usuario DKG-309-CAN-MPU V-24 (25.08.2010)(21.02.2012)
- 10 -
Pantalla Descripción Contenido
1 Parametros de línea (fase a neutro)
Estado de la planta Volts línea L1-N, Frecuencia de línea Volts línea L2-N, Voltaje de batería Volts línea L3-N, Temperatura de refrigerante
2 Parametros de línea (fase a fase)
Estado de la planta Volts línea L1-L2, Frecuencia de línea Volts línea L2-L3, Voltaje de batería Volts línea L3-L1, Temperatura de refrigerante
3 Parámetros de planta (fase a neutro)
Estado de la planta Corriente planta L1, Frecuencia planta Corriente planta L2, Potencia Activa planta (KW) Corriente planta L3, Volts planta L1
4 Parámetros de planta (fase a fase)
Estado de la planta Corriente planta L1, Frecuencia planta Corriente planta L2, Potencia Activa planta (KW) Corriente planta L3, Volts planta L1-L2
5 Parámetros de motor
Estado de la planta Presión de aceite, Revoluciones de motor (rpm) Temperatura refrigerante, Voltaje de batería Nivel de combustible,
6 Parámetros Completos de planta (fase a neutro)
Estado de la planta Volts L1 planta, Volts L2 planta, Volts L3 planta Corriente L1 planta, Corriente L2 planta, Corriente L3 planta, Frecuencia planta, Presión aceite Potencia Activa planta (KW), Temperatura refrigerante Factor de Potencia planta, Nivel de combustible Revoluciones rpm, Voltaje de batería
7 Parámetros completos de planta (fase a fase)
Estado de la planta Volts L1-L2 planta, Volts L2-L3 planta, Volts L3-L1 planta Corriente L1 planta, Corriente L2 planta, Corriente L3 planta Frecuencia planta, Presión aceite Potencia Activa planta (KW), Temperatura de refrigerante Factor de Potencia planta, Nivel de combustible Revoluciones rpm, Voltaje de batería
8 Parámetros Gráficos de planta (fase a neutro)
Estado de la planta Corriente L1 planta Volts L1 planta Potencia Activa planta(%), Frecuencia planta Presión de aceite Temperatura de refrigerante Nivel de combustible
9 Parámetros Gráficos de planta (fase a fase)
Estado de la planta Corriente L1 planta Volts L1-L2 planta Potencia Activa planta (%), Frecuencia planta Presión de aceite Temperatura de refrigerante Nivel de Combustible
10 Parámetros de potencia de planta
Estado de la planta Fase L1 planta: Potencia Activa (KW) / Factor de Potencia Fase L2 planta: Potencia Activa (KW) / Factor de Potencia Fase L3 planta: Potencia Activa (KW) / Factor de Potencia

Manual de Usuario DKG-309-CAN-MPU V-24 (25.08.2010)(21.02.2012)
- 11 -
Pantalla Descripción Contenido
11 Mediciones CANBUS 1 / 6
Porcentaje de Torque Porcentaje de carga Presión de combustible
12 Mediciones CANBUS 2 / 6
Relación de combustible Economía de combustible promedio HorasTotales de Motor
13 Mediciones CANBUS 3 / 6
Presión de aire Temperatura ambiente Temperatura del aceite
14 Mediciones CANBUS 4 / 6
Temperatura de múltiple de admisión 1 Temperatura gases de escape Temperatura de combustible
15 Mediciones CANBUS 5 / 6
Presurización del turbo Presión Diferencial del filtro de aire Presión de la carcasa de la marcha
16 Mediciones CANBUS 6 / 6
Nivel de refrigerante Nivel de aceite Presión de refrigerante
17 Logotipo de compañía
18 Lista de Alarmas
Si no existe alarma, se mostrará “END OF ALARM LIST”. Las alarmas, botes de carga, advertencias normales y de ECU J1939 se mostrarán como una pantalla para cada entrada. El cambio a la próxima entrada será hecho con el
botón▼. 19 Fecha-Hora,
Versión de programa
Fecha y hora. Versión de programa Operativo. Versión de programa J1939.
20 Contadores Estadísticos 1 / 3
Horas de motor Potencia activa total de planta (KW-h)
21 Contadores Estadisticos 2/ 3
Horas de motor restantes para Servicio Tiempo para Servicio
22 Contadores Estadisticos 3 / 3
Intentos de arranque Totales Operaciones Totales de motor
23 Registro de Eventos
La unidad provee información de los últimos 200 eventos,
empezando por el más reciente. Por favor revise el capítulo 10 para información detallada acerca del registro de eventos.
Manual de Usuario DKG-309-CAN-MPU V-24 (25.08.2010)(21.02.2012)
- 12 -
4. ALARMAS Y ADVERTENCIAS
Las Alarmas indican situación anormal de la planta y están divididas en 3 niveles de prioridad:
1- ALARMAS: Estas son las más importantes condiciones de falla y provocan:
- Encendido fijo del led “ALARM”,
- Que el contactor de transferencia a planta se libere inmediatamente,
- Que el motor sea detenido inmediatamente,
- Que las salidas digitales de Sirena, Alarma, Alarma+Bote de carga y
Alarma+Bote de carga +Advertencia operen (si fueron seleccionadas vía menú de
programación).
2- BOTES DE CARGA : Estas condiciones de falla provocan:
- Parpadeo del led “ALARM”,
- Que el contactor de transferencia a planta se libere immediatamente,
- Que el motor sea detenido después del período de enfriamiento,
- Que las salidas digitales Sirena, Alarma+Bote de carga y Alarma+Bote de carga
+Advertencia operen, (si fueron seleccionadas vía menú de programación).
3- ADVERTENCIAS: Estas condiciones provocan:
- Encendido fijo del led “WARNING”,
- Que las salidas digitales Sirena y Alarma+Bote de carga+Advertencia operen, (si
fueron seleccionadas vía menú de programación)
Si se presiona el botón “ALARM MUTE”, la salida de sirena se desactivará; sin embargo
las alarmas existentes persistirán y deshabilitarán la operation de la planta.
Las Alarmas operan en base a primicia:
-Si se presenta una alarma, las demás alarmas, botes decarga y advertencias no se aceptarán,
-Si se presenta un bote de carga, los demás botes y advertencias no se aceptarán,
-Si se presenta una advertencia, las demás advertencias no se aceptarán.
Las Alarmas pueden ser tipo ENCLAVE tras la programación.En este caso, aún si la causa de la
alarma se suprime, permanecerá encendida y deshabilitará la operación de la planta. Las alarmas
existentes pueden cancelarse presionando uno de los botones de modo de operación(LOAD TEST /
TEST / OFF / AUTO).
La mayoría de las alarmas tienen niveles programables de disparo. Vea el capítulo de
programación para límites ajustables de alarma.
“LOW OIL PRESSURE”: Puesta si se detecta señal en la entrada del interruptor de baja presión de
aceite ó si el valor de presión medido por el enviador se encuentra por debajo del límite programado.
Los límites de alarma y advertencia se programan separadamente en la entrada para el enviador de
presión de aceite. Esta falla será monitoreada con el retraso “Holdoff Timer” cuando opere el motor.
También si el interruptor de presión de aceite está abierto al comienzo de un intento de arranque, el
motor no será arrancado y se mostrará la leyenda “Oil Pressure Exists!”. Cuando el interruptor de
presión esté cerrado,se reestablecerá la operación normal.
“HIGH TEMPERATURE”: Puesta si se detecta señal en la entrada de interruptor de alta temperatura ó
el valor de temperatura de refrigerante medida desde el enviador está por encima del límite
programado. Los límites de advertencia y alarma se programan independientemente para la entrada del
enviador de temperatura.
“LOW TEMPERATURE” (advertencia) : Puesta si el valor de temperatura de refrigerante medida
desde el enviador está por debajo del límite “Engine Heating Temperature”.
“LOW FUEL”: Puesta si se detecta señal en la entrada de bajo nivel de combustible ó el nivel medido
por el enviador está por debajo del límite programado. Los límites de advertencia y alarma se
programan independientemente para la entrada de enviador de combustible.

Manual de Usuario DKG-309-CAN-MPU V-24 (25.08.2010)(21.02.2012)
- 13 -
“RECTIFIER FAIL”: Puesta si se detecta señal en la entrada de falla de cargador. Esta entrada se
monitorea solamente cuando los voltajes de línea están presentes.
“EMERGENCY STOP”: Puesta si se detecta señal en la entrada de paro de emergencia.
“SPARE-1 / SPARE-2”: Puesta si se detecta señal en la entrada auxiliar correspondiente.
“LOW SPEED / HIGH SPEED”: Puesta si la frecuencia del generador sale de los límites programados.
Estas fallas serán monitoreadas con el retraso “Holdoff Timer” cuando opere el motor. Los límites bajo
y alto para la advertencia y la alarma son programados independientemente. Existe otro paro por alta
frecuencia cuyo límite está 12% arriba del limite alto y está siempre activo para detener el motor
inmediatamente.
“START FAIL” (alarma): Puesta si el motor no funciona tras completar el número de intentos de
arranque programado.
“STOP FAIL” (advertencia): Puesta si el motor no se ha detenido antes de que expire el tiempo de paro
“Stop Timer”.
“OVERLOAD” (bote de carga): Puesta si al menos una de las corrientes de las fases de planta
exceden el límite de sobrecorriente Overcurrent Limit durante el tiempo Overload Timer. Si las
corrientes caen debajo del límite antes que expire el tiempo entonces no habrá alarma.
“EXCESS POWER” (bote de carga): Puesta si la potencia de la planta (KW) suministrada a la carga
excede el límite de potencia excedida “Excess Power” excediendo también el tiempo “Overload
Timer”. Si la potencia cae debajo del límite antes que expire el tiempo entonces no habrá alarma.
“GENSET LOW VOLTAGE”: Puesta si cualquiera de los voltajes de las fases del generador sale de los
límites programados excediendo el tiempo “Overload Timer”. Esta falla será monitoreada con el retraso
“holdoff timer” cuando opere el moto.
“GENSET HIGH VOLTAGE”: Puesta si cualquiera de los voltajes de las fases del generador sale de
los límites programados excediendo el tiempo “Overload Timer”. Esta falla será monitoreada con el
retraso “holdoff timer”cuando opere el motor.
“LOW BATTERY VOLTAGE” (advertencia): Puesta si el voltaje de batería cae por debajo del límite
programado. Esta falla no se monitorea durante el arranque del motor.
“HIGH BATTERY VOLTAGE”: Puesta si el voltaje de batería excede los límites programados. Los
niveles de advertencia y alarma son programables.
“CHARGE”: Puesta si ocurre una falla de alternador de carga ó si se rompió la banda. Esta condición
de falla puede resultar en una advertencia ó alarma según la programación. “MAINS PHASE ORDER FAIL” (advertencia): Puesta si la revisión de secuencia de fases está habilitada,existen las fases de línea pero su orden está inverso. Esta falla evita que se cierre el Contactor de línea.

Manual de Usuario DKG-309-CAN-MPU V-24 (25.08.2010)(21.02.2012)
- 14 -
5. MODOS DE OPERACION
Los modos de operación se seleccionan presionando las teclas del panel frontal. Si cambia el
modo de operación mientras que la planta funcione provocará un comportamiento acorde al nuevo modo
seleccionado. Por ejemplo, si el modo “LOAD TEST” se selecciona mientras la planta funciona en modo
“TEST”, entonces procederá a tomar la carga.
“OFF”: En este modo, el contactor de línea será energizado (salida de transfer a línea) si los voltajes de
fases de línea están dentro de los limites programados. El motor será detenido.
“AUTO”: Se usa para transferencia automática entre línea y planta. Si al menos uno de los voltajes de
fase de línea está fuera de límites, el contactor de línea será desactivado.
El diesel comenzará be started al tiempo programado después del temporizador de precalentamiento.
Cuando el motor funcione, el relevador de arranque será inmediatamente desactivado. El motor
funcionará sin carga durante el periodo de calentamiento del motor. Después, si los voltajes de fase del
generador y la frcuencia están dentro de los límites, la unidad esperará el período de tiempo
correspondiente y el contactor del generador (salida de transfer a planta) será energizado.
Cuando todos los voltajes de fase delínea estén dentro de los the límites, el motor continuará operando
durante el tiempo de espera de línea. Al final de este periodo el contactor del generador se desactiiva y el
contactor de línea será energizado. Si existe periodo de enfriamiento, la planta continuará funcionando
durante el mismo. Al final del periodo, el solenoide ó válvula de combustible será desenergizado y el
diesel se detendrá. La unidad estará lista para la próxima falla de línea.
Si la operación de la planta está deshabilitada por la tabla de operación semanal , el led AUTO
parpadeará, y la operación de la msma será como en el modo “OFF”.
“TEST”: Se usa para probar la planta cuando la línea este presente, ó para mantener funcionando la
planta en el modo de respaldo de emergencia. La operación de la planta es similar al modo AUTO, pero
el contactor de línea no se desactivará si la línea no está apagada. Si la línea está apagada, el contactor
de línea se desactivará y el contactor del generador será activado. Cuando la línea regrese de nuevo, se
efectuará una transferencia, pero el motor continuará funcionando a menos que se seleccione otro modo.
Para detener el motor, seleccione el modo “AUTO” u “OFF”.
“LOAD TEST”: Se usa para probar la planta bajo carga. Una vez que se seleccione este modo, el motor
funcionará y la carga será transferida a la planta. La planta alimentará a la carga indefinidamente a
menos que se seleccione otro modo.

Manual de Usuario DKG-309-CAN-MPU V-24 (25.08.2010)(21.02.2012)
- 15 -
6. OTRAS CARACTERISTICAS
6.1 Arranque Remoto
La unidad ofrece la posibilidad de modo de ARRANQUE REMOTO. Cualquier entrada digital puede ser asignada como entrada de arranque remoto usando el submenú: “SEL FUNCION de ENTRADA”.(Dar enter hasta llegar a la IN-06 o IN-07 y con fleha derecha encontrar la función 18(Ent Arranque Remoto), regresarse con tecla menú izq. al menú principal y selecc. “Configuracion Entrada”, dar enter hasta llegar a la entrada configurada para arranque remoto y en el parametro “ACT:” poner el numero 3 para evitar cualquier accion de esta entrada.
La señal de ARRANQUE REMOTO puede ser un contacto NA ó NC, conectando ya sea al positivo ó negativo de batería. Estas selecciones se hacen usando la configuración de la entrada. En este modo las fases de línea no son monitoreadas. Si la señal de ARRANQUE REMOTO está presente es porque se supone que la línea ha fallado; de manera inversa si la señal de ARRANQUE REMOTO está ausente, es porque se supone que los voltajes de línea están presentes. Los LEDs del diagrama mímico del panel frontal reflejarán el estado de la entrada de ARRANQUE REMOTO.
6.2 Selección de tipo de enviador (bulbo) o sensor resistivo
La unidad tiene la habilidad de adaptarse a cualquier tipo de enviador de presión de aceite y temperatura. Las características de los tipos de enviador más comunes están grabadas en una memoria y se pueden seleccionar de acuerdo a una lista. Sin embargo se pueden usar enviadores no estandard ingresando los datos de sus características a la tabla. Selección de tipo de Enviador de Presión de aceite:
Los tipos disponibles son: 0: Las características del enviador se definen en la tabla de Características de enviador. 1: VDO 0-7 bares (10-180 ohms) 2: VDO 0-10 bares (10-180 ohms) 3: MURPHY, DATCON 0-7 bares (240-33 ohms) 4: DATCON 0-10 bares (240-33 ohms) 5: DATCON 0-7 bares (0-90 ohms) 6: DATCON 0-10 bares (0-90 ohms) 7: DATCON 0-7 bares (75-10 ohms)
Selección de tipo de Enviador deTemperatura:
Los tipos disponibles son: 0: Las características del enviador se definen en la tabla de Características de enviador. 1: VDO 2: Tipo DATCON DAH 3: Tipo DATCON DAL Selección del Enviador de Nivel de Combustible: La resistencia del enviador de Nivel de combustible también es programable.
Selección de enviador de Temperatura de aceite (solo para DKG-509, 509J)
Los tipos disponibles son: 0: Las características del enviador se definen en la tabla Características de enviador. 1: VDO 2: Tipo DATCON DAH 3: Tipo DATCON DAL
Manual de Usuario DKG-309-CAN-MPU V-24 (25.08.2010)(21.02.2012)
- 16 -
6.3 Calentamiento de motor
Especialmente para motores sin precalentador, ó con uno dañado, puede requerirse que la planta no tome la carga hasta que alcance una temperatura adecuada. La unidad ofrece 2 maneras distintas de calentar el motor. 1. Calentamiento controlado porTemporizador: Este modo de operación se selecciona cuando el parámetro “Engine Heating Method” se ajusta a 0. En este modo, el motor funcionará durante el parámetro “Engine Heating Timer”, y después la
planta tomará la carga. 2. Calentamiento controlado por Temporizador y temperatura: Este modo de operación se selecciona cuando el parámetro “Engine Heating Method” se ajusta a 1. En este modo, inicialmente el motor funcionará durante el parámetro “Engine Heating Timer”, luego
continuará funcionando hasta que la temperatura medida del refrigerante alcance el límite definido en el parámetro “Engine Heating Temperature”. Cuando la temperatura requerida es alcanzada, la
carga será transferida a la planta. Este mod puede usarse como un respaldo del precalentador del motor. Si el cuerpo del motor está caliente el calentamiento se eliminará.
6.4 Velocidad mínima de motor (Ralentí)
Puede requerirse que el motor opere a velocidad mínima de duración programada para calentamiento del motor. La duración de esta operación se ajusta con el parámetro “Tiempo Marcha Ralenti”. La velocidad mínima quedará determinada por su ajsute en la unidad de control del
gobernador del motor. Cualquier relevador auxiliar puede asignarse como salida No.26(Baja Veloc.(Ralenti)) usando los parámetros de programa “Definiciones de Reles”. También se pueden asignar los relevadores
de los módulos de extensión con esta función. La operación a velocidad mínima se efectúa tanto en la secuencia de arranque del motor como en la de enfriamiento. Las protecciones de velocidad y voltaje están deshabilitadas durante la operación a velocidad mínima.
6.5 Calentador de bloque de Motor
La unidad es capaz de proveer una salida de relevador para manejar una resistencia de
caalentamiento de bloque. La referencia de temperatura es la temperatura de refrigerante medida
desde la entrada análoga del enviador.
La función de relevador de calentamiento de bloque puede ser asignada a los relevadores
auxiliares usando los parámetros de programa “Relay Definition”. También se pueden asignar los
relevadores de los módulos de extensión para responder a esta función.
El límite de temperatura del cuerpo del motor se ajusta usando el parámetro “Engine Heating
Temperature”. El mismo parámetro se usa para la operación de calentamiento del motor.
El relevador se activará si la temperatura del cuerpo cae 4 grados por debajo del límite puesto
en “Engine Heating Temperature”. Se apaga cuando la temperatura del cuerpo excede el valor en
“Engine Heating Temperature”.

Manual de Usuario DKG-309-CAN-MPU V-24 (25.08.2010)(21.02.2012)
- 17 -
6.6 Control de bomba de combustible
La unidad es capaz de proveer una salida de relevador para manejar el motor de la bomba de
combustible. La bomba se usa para transferir combustible desde un tanque principal de gran
capacidad (si existe), hacia un tanque diario que generalmente se integra a la base de la planta y que
tiene poca capacidad.
La referencia de nivel de combustible se mide a través del enviador análogo de nivel. Cuando
el nivel de combustible medido por el enviador cae debajo del parámetro “Fuel Pump Low Limit”, el
relevador de la bomba operará. Cuando el nivel de combustible alcance el parámetro Fuel Pump
High Limit, el relevador se apagará. Entonces el nivel del tanque en la base siempre se mantendrá
entre los límites establecidos en los parámetros “Fuel Pump Low Limit” y “Fuel Pump High Limit”.
La función de relevador de bomba de combustible puede asignarse a relevadores auxiliares
usando los parámetros de programa “Relay Definition”. También los relevadores del módulo de
extension pueden asignarse a esta función.
6.7 Simulación de línea (Arranque deshabilitado)
La unidad ofrece una entrada opcional SIMULACION de LINEA. Cualquier entrada digital puede asignarse como “Simulate Mains” usando el parámetro de programa “Input Function Select”. También es necesario ajustar el parámetro de programa ACTION de la entrada correspondiente a 3 para evitar que se genere cualquier alarma desde esta entrada.
La señal de SIMULACION de LINEA puede ser un contacto NA ó NC, conectando ya sea a positivo ó negativo de batería. Etas selecciones se hacen usando el menú de programación. Si la entrada de Simulación de línea está definida y la señal de entrada está activa, las fases
de línea no se monitorean y se suponen dentro de límites. Esto evita que la planta arranque aún en caso de una falla de línea. Si la planta está funcionando cuando se aplica la señal, los ciclos usuales de espera de línea y enfriamiento se efectuarán antes de parar al motor. Cuando esté presente la señal de SIMULACION de LINEA, los LEDs del diagrama mímico del panel frontal mostrarán el voltaje de línea como presente. Cuando la señal es pasiva, la unidad regresará a operación normal y monitoreará el estado de voltaje de la línea.
La operación de ARRANQUE REMOTO supera en jerarquía a las operaciones SIMULACION DE LINEA y FORZADO A ARRANCAR.

Manual de Usuario DKG-309-CAN-MPU V-24 (25.08.2010)(21.02.2012)
- 18 -
6.8 Simulación retardada de línea, carga de Baterías
La característica de simulación retardada de línea se usa en sistemas de telecomunicación que cuentan con respaldo de baterías donde las mismas son capaces de alimentar a la carga durante un cierto período. Sólo se solicita arranque de la planta cuando el voltaje de batería cae debajo del nivel crítico. Una vez que el motor funciona, el sistema rectificador comienza a cargar las baterías y el voltaje sube inmediatamente. Así que el motor debe continuar funcionando durante un período programado para una carga eficaz. El nivel de voltaje crítico de la batería será detectado por una unidd externa que provee la señal digital de simulación de línea para la unidad de control de planta. La unidad ofrece una entrada opcional de SIMULACION DE LINEA. Cualquier entrada digital puede ser asignada como Simulación de Línea usando los parámetros de programa “Input Function Select”. También es necesario ajustar el parámetro de programa ACTION de la entrada correspondiente a 3 para evitar cualquier alarma que se genere en esta entrada. La señal de SIMULACION DE LINEA puede ser un contacto NA ó NC, conectando ya sea a positivo ó negativo de batería. Estas selecciones se hacen usando el menú de programación. Si el parámetro de programa Simulación retardada de línea se ajusta a 1 y la señal de
entrada está activa cuando la planta no está alimentando a la carga, las fases de línea no son monitoreadas y se suponen dentro de los límites. Esto evita que la planta arranque cuando la señal de simulación de línea está presente (baterías cargadas). La planta arrancará cuando los voltajes de línea están fuera de límites y la señal de simulación de línea no está presente. Si la planta está funcionando cuando se aplique la señal, entonces la SIMULACION DE LINEA se evitará durante el parámetro de programa “Flashing Relay Timer”. Después de esto, los ciclos usuales de espera de línea y enfriamiento se efectuarán antes de detener al motor. Cuando la señal de SIMULACION DE LINEA esté presente, los LEDs del diagrama mímico del panel frontal reflejarán el voltaje de línea como presente. Cuando la señal sea pasiva, la unidad regresará a operación normal y monitoreará el estado de voltaje de la línea.
La operación de ARRANQUE REMOTO prevalece sobre la de SIMULACION RETARDADA DE LINEA. Cuando se ajustan los parámetros “Remote Start Operation” y “Delayed Simulate Mains” se efectúa la operación de ARRANQUE REMOTO.

Manual de Usuario DKG-309-CAN-MPU V-24 (25.08.2010)(21.02.2012)
- 19 -
6.9 Operación dual alternada de plantas
La operación dual alternada de plantas consiste en el intercambio regular de la carga entre 2
plantas. El uso de 2 plantas en lugar de una se debe ya sea a propósitos de seguridad en caso de
falla de planta ó a operación continua con paros de servicio requeridos.
El periodo de funcionamiento para cada planta es ajustable usando el parámetro de programa
“Flashing Relay Timer”. Si el tiempo se ajusta a 0 horas, será puesto realmente a 2 minutos con el
propósito de prueba rápida.
Se provee de una salida de relevador tipo “palanca”, basada en el parámetro “Flashing Relay
Timer”. Consiste en que cada que se termine el tiempo programado en el parámetro “Flashing
Relay Timer”, la salida de relevador cambiará de posición.
La función de relevador tipo “palanca” puede ser asignada a relevadores auxiliares usando el
parámetro de programa “Relay Definition”. También se pueden asignar los relevadores del módulo
de extensión con esta función.
La operación dual alternada de plantas también usa la característica de Simulación de
Línea. Revise el capítulo 6.7 para una explicación detallada de esta característica.
Prioridad en la operación dual alternada de plantas: Puede requerirse que el sistema dual de plantas arranque la misma planta cada que falla la
línea. Esto se logra usando la entrada PRIORIDAD.
Cualquier entrada digital puede ser asignada como Prioridad usando los parámetros de programa “Input Function Select”. También es necesario ajustar el parámetro de programaa ACTION de la entrada correspondiente a 3 para evitar que se genere cualquier alarma desde esta entrada.
La señal de Prioridad puede ser un contacto NA ó NC, conectando ya sea a positivo ó a
negativo de batería. Estas selecciones se hacen usando el menú de programación. Si se define la entrada de Prioridad, el sistema trabajará en este modo. Si se aplica la señal de prioridad, la unidad se convertirá en maestra tras cada falla de línea. Si no se aplica la señal de prioridad, la unidad se convertirá en esclava y la otra arrancará.
Contacte a DATAKOM para un manual completo de aplicación.
Manual de Usuario DKG-309-CAN-MPU V-24 (25.08.2010)(21.02.2012)
- 20 -
6.10 Indicador de Servicio Requerido
Este led está diseñado para ayudar a que sea efectuado un mantenimiento periodico consistente
a la planta.
El mantenimiento periodico se logra basicamente tras completar cierto número de horas dado
(por ejemplo 200 horas), pero aunque no se hayan completado estas horas, se logra tras cierto límite de
tiempo transcurrido (por ejemplo 12 meses).
El led “SERVICE REQUEST” no tiene efecto alguno en la operación de la planta.
La unidad tiene tanto las horas de motor como el tiempo cronológico programables para
mantenimiento. Las horas de motor se programan en incrementos de 50-horas, el límite de tiempo es
programable en pasos de 1 mes. Si alguno de los valores programados es cero, significa que el
parámetro no será usado. Por ejemplo, un período de mantenimiento de 0 meses indica que la unidad
requerirá mantenimiento basándose sólo en las horas de motor sin límite de fecha. Si también se ponen
las horas de motor a 0 significará que el indicador “SERVICE REQUEST” quedará inoperante.
Cuando las horas de motor O el tiempo límite se acaben, el led “SERVICE REQUEST” (rojo)
comenzará a parpadear y la función de relevador de servicio requerido se activará.
La función de relevador de servicio requerido puede ser asignada a los relevadores auxiliares
usando los parámetros de programa “Relay Definition”. También se pueden asignar los relevadores
de un módulo de extensión con esta función.
Para apagar el led “SERVICE REQUEST” y reestablecer el periodo de servicio, presione juntas las teclas “ALARM MUTE” y “LAMP TEST” por 5 segundos.
Las horas y el tiempo límite restantes se van guardando en una memoria no volátil por lo que no
son afectadas por fallas de energía.
El tiempo y las horas de motor para servicio próximo se muestran en el menú de contadores
estadísticos “STATISTICAL COUNTERS”.

Manual de Usuario DKG-309-CAN-MPU V-24 (25.08.2010)(21.02.2012)
- 21 -
6.11 Horímetro de motor
La unidad incorpora un horímetro de motor no-reestablecible. La información del horímetro se
guarda en una memoria no volátil y no resulta afectada por fallas de energía.
Las horas de motor se muestran en el menú de contadores estadísticos.
6.12 Mostrar Fecha y Hora
Se muestra la fecha y hora para su verificación.
6.13 Mostrar Versión de programa
Algunas características adicionales son instaladas con el lanzamiento de programas
consecutivos. In order to be sure of the validity of the status de la unidad, se necesita saber la versión
de programa.
La versión de programa de la unidad se muestra junto con la información de fecha – hora.
La versión de programa consta de 2 números. El primero representa la versión operativa de
programa de la unidad.
6.14 Conexión de Módem
La unidad es capaz de hacer llamadas modem en caso de alarma, así como contestar llamadas modem hechas desde una locación remota. Los módems GSM y los clásicos modems de red por cable (PSTN) son aceptables. Si el módem se conecta a la unidad, el parámetro de programa Modem Enable debe ser ajustado a 1, de lo contrario puede ocurrir una operación errónea. A maximum of 2 telephone numbers pueden ser definidos para llamadas salientes de modem. En caso de alarma, la unidad intentará alcanzar los centros de control asociados con cada número. En caso de falla de conexión de modem, la llamada se repetirá hasta 30 veces con intervalos de 2 minutos.
Cuando la llamada de modem esté efectuándose, un ícono de telefono ( ) aparecerá en la esquina superior derecha de la pantalla.
Si los parámetros “Modem Enable” ó “SMS Enable” ó “MODBUS Address” son
distintos a cero, la conexión local de PC no funcionará.
Los módems anunciados son tipos que se alimentan de la misma fuente de CD de la unidad. La mayoría de los otros módems de escritorio con comandos estándar AT se pueden usar, pero es responsibilidad del usuario proveer una fuente ininterrumpilble de CA al módem. El cable de módem necesario será surtido por DATAKOM. Las llamadas Modem siempre son terminadas por la central del programa RAINBOW. Sin embargo la unidad no permite conexiones que excedan 2 minutos de duración, y cuelga el módem cuando este período expira. El programa para PC usado para monitoreo y programación remotos es el mismo programa RAINBOW usado en la conexión RS-232. Por favor note que la operación del modem también es compatible con la comunicación MODBUS. Por lo tanto la unidad puede iniciar y recibir llamadas de/hacia una estación MODBUS maestra. Revise el capítulo_8 para más detalles acerca de la comunicación MODBUS.

Manual de Usuario DKG-309-CAN-MPU V-24 (25.08.2010)(21.02.2012)
- 22 -
6.15 Envío de mensajes SMS
El envío GSM SMS se activa ajustando el parámetro de programa “SMS Enable” a 1.
Si los parámetros “Modem Enable” ó “SMS Enable” ó “MODBUS Address” son distintos a cero, la conexión local de PC no funcionará.
Cuando ocurra una condición de falla, la unidad compondrá un mensaje SMS y lo enviará a un máximo de 6 números de teléfono. Si existe modem habilitado, sólo se dispone de 4 números de teléfono para envío del mensaje SMS. La unidad también es capaz de enviar mensajes SMS bajo las siguientes condiciones, sin crear una alarma ó advertencia visibles: “Mains Fail”, “Mains Restored” (habilitadas vía parámetro de programa “SMS on Mains Change”) “Fuel Tefht”, “Fuelling” (habilitada al ajustar el parámetro “Fuel Consumption / Hour” con un dato
diferente a 0) Si están habilitados tanto el módem como los SMS, la unidad enviará primero los mensajes SMS y después intentará la conexión de modem. Cuando el envío del mensaje SMS esté en proceso, aparecerá un ícono (SMS) en la parte
superior derecha de la pantalla. El máximo número de alarmas transmitido en un mensaje SMS es de 4. Esta limitación se debe a que la máxima capacidad del mensaje es de 160 caracteres. A continuación tenemos un ejemplo de mensaje GSM SMS:
DKGxxx <SITE-ID> STOP :LOW OIL PRESSURE SW. END OF ALARM LIST
La primer línea del mensaje porta información acerca del tipo unidad y el renglón de identidad de sitio. Esta línea sirve para identificar la planta que envía el mensaje SMS. Cada línea siguiente drá información acerca de la falla. El mensaje siempre terminará con el renglón “END OF ALARM LIST”.
Cuando se envía el mensaje, las alarmas existentes serán enmascaradas, provocando que se libere el relevador de alarma audible para evitar mensajes consecutivos GSM SMS. Cualquier alarma que arribe resultará en un nuevo mensaje GSM SMS. El mensaje nuevo indicará todas las alarmas existentes, aún las enmascaradas. El cable necesario para módem GSM será surtido por DATAKOM. Es el mismo cable que se usa en los módems PSTN (land).

Manual de Usuario DKG-309-CAN-MPU V-24 (25.08.2010)(21.02.2012)
- 23 -
6.16 Monitoreo y Programación remotos
Gracias al puerto serie estandard RS-232, la unidad ofrece la característica de monitoreo y
programación remotos.
El programa de monitoreo y programación remotos para PC se llama RAINBOW y puede
bajarse desde el sitio de internet www.datakom.com.tr con “password login”. Los modos módem, SMS y Modbus no son compatibles con la conexión local a PC.Los parámetros de programa Modem Enable, SMS Enable and MODBUS Address deben ajustarse a 0
antes de la conexión.
El programa RAINBOW permite la visualization y grabación de todos los parámetros medidos.
Los parámetros grabados pueden analizarse gráficamente e incluso imprimirse. El programa también
permite la programación de la unidad y el almacenamiento de los parámetros de programa en la PC ó
la descarga de parámetros guardados en la PC hacia la unidad. Para PCs sin un puerto serial, los siguientes adaptadores USB a Serie están probados y aprobados : DIGITUS USB 2.0 TO RS-232 ADAPTER (PRODUCT CODE: DA70146 REV 1.1) DIGITUS USB 1.1 TO RS-232 ADAPTER (PRODUCT CODE: DA70145 REV 1.1) FLEXY USB 1.1 TO SERIAL ADAPTER (PRODUCT CODE BF-810) CASECOM USB TO SERIAL CONVERTER (MODEL: RS-01) El cable necesario para conexión a PC puede ser suministrado por DATAKOM.
6.17 Control Externo de la Unidad
La unidad ofrece control externo total a través de las entradas digitales programables. Cada
entrada digital puede ser programada para las siguientes funciones:
- Modo forzado OFF
- Modo forzado AUTO
- Modo forzado TEST
- Modo forzado LOAD TEST
- Deshabilitar Auto arranque
- Forzado a arrancar
- Reestablecimiento de falla
- Silenciar Alarma
- Bloqueo de Panel
Las señales externas de selección de modo tienen prioridad sobre los botones de modo de la
unidad. Si el modo se selecciona por señal externa, es imposible cambiarlo mediante las teclas del panel
frontal. Sin embargo, si se remueve la señal externa de modo, la unidad regresará al último modo
seleccionado mediante los botones.
También es posible bloquear el panel frontal por completo para comando remoto.

Manual de Usuario DKG-309-CAN-MPU V-24 (25.08.2010)(21.02.2012)
- 24 -
6.18 Ejercitador
La unidad ofrece ejercitamiento automático del motor. El ejercicio puede efectuarse en base a operación diaria, semanal ó mensual. El día y hora del arranque se programa así como su duración. El ejercicio puede efectuarse con ó sin carga tras la programación respectiva. Los parámetros de programa relativos al ejercitador son:
Hora y día de arranque para ejercicio Duración del ejercicio Ejercicio con/sin carga Período del ejercicio (Diario/ Semanal / Mensual) Por favor refiérase a la sección de programación para una descripción más detallada de los parámetros mencionados. Cuando llegue el día y hora del ejercicio, la unidad cambiará automaticamente ya sea al modo “TEST” ó al modo “LOAD TEST”. El motor operará y si el ejercicio se seleccionó bajo carga,esta será transferida a la planta. Si ocurriera una falla de línea mientras se realiza un ejercicio sin carga,esta no sera transferida a la planta a menos que haya sido permitida previamente (mediante el parámetro respectivo ajustado a 1) la Operación de Respaldo de Emergencia. Por lo tanto es altamente
recomendable que el modo de rspaldo de emergencia esté habilitado cuando se tiene un ejercicio sin carga. Al final de la duración del ejercicio, la unidad regresará al modo inicial de operación. Si se presiona cualquier tecla de selección de modo durante un ejercicio,este terminará. Usando el modo de ejercicio diario, la unidad puede alimentar a la carga desde la planta durante horas predefinidas del día. Esta operación puede ser usada durante períodos de tarifa alta a lo largo del día.

Manual de Usuario DKG-309-CAN-MPU V-24 (25.08.2010)(21.02.2012)
- 25 -
6.19. Restablecimiento a parámetros de fábrica
Para regresar a los valores de parámetro de fábrica:
-Mantenga presionados los botones “OFF”,“LAMP TEST”y “ALARM MUTE” por 5 segundos, -se mostrará “RETURN TO FACTORY SET” -inmediatamente presione y mantenga así el botón “ALARM MUTE” por 5 segundos -Los valores de fábrica se reprogramarán en la memoria de parámetros. o
No es posible restaurar parámetros de usuario.
6.20. Control de válvula solenoide para motores a gas
La unidad provee una función especial para la válvula solenoide de control de un motor a gas.
La válvula soleniode de un motor a gas es diferente de la de un motor a diesel. Debe abrirse después de comenzar el arranque y debe cerrarse en cada intento de arranque completado. El retraso entre el arranque y la apertura del solenoide se ajusta usando el parámetro de programa “Gas Solenoid Delay”.
La función de relevador para válvula solenoide de gas puede asignarse a relevadores
auxiliares usando los parámetros de programa “Relay Definition”. También los relevadores de un
módulo de extensión pueden asignarse a esta función.
6.21. Recorte de carga / Carga muerta
La característica de recorte de carga consiste en la desconexión de las cargas menos cruciales cuando la potencia de la planta se aproxima a sus límites. Estas cargas se alimentarán de nuevo cuando la potencia de la planta caiga debajo del límite programado. La función interna de recorte de carga está siempre activa. Cualquiera de los relevadores auxiliares pueden ser usados como la salida de recorte de carga. La función de carga muerta consiste en la conexión de una carga resistiva si la potencia total de la carga normal está por debajo de un límite y en la desconexión de la misma cuando se exceda otro límite. La function de carga muerta es inversa a la de recorte de carga, por lo que la misma salida puede usarse para ambos propósitos. Los parámetros usados en Recorte de carga están en el grupo de Parámetros Eléctricos: “Load Shedding Low Limit”: Si la potencia activa cae debajo de este límite, entonces el relevador
de Recorte de carga se desactivará. “Load Shedding High Limit”: Si la potencia activa del generador excede este límite, entonces el relevador de recorte de carga será activado.
Manual de Usuario DKG-309-CAN-MPU V-24 (25.08.2010)(21.02.2012)
- 26 -
6.22. Robo de combustible / Mensajes de combustible La unidad es capaz de enviar mensajes SMS en caso de robo de combustible ó rellenado. Estos mensajes SMS son enviados sin crear una condición visible de falla. Estas características se habilitan ajustando el parámetro de programa “Engine Parameters >
Fuel Consumption / hour” a un valor distinto a 0%. El parámetro “Fuel Consumption / hour” debe ajustarse a un valor claramente mayor que el
consumo máximo de combustible del motor. Si el nivel de combustible medido desde el sender desciende más que este parámetro
durante un período de 1 hora, entonces se envía un mensaje sms “FUEL THEFT” a los números de teléfono programados.
Si el nivel de combustible medido desde el sender aumenta más que este parámetro durante
un período de 1 hora, entonces se envía un mensaje sms “FUELLING” sms a los números de teléfono programados.
6.23. Actualización de Firmware La unidad ofrece la posibilidad de actualización del firmware en el campo. El firmware se
actualiza a través del puerto RS-232 usando el programa Rainbow ó mediante un programa especial DOS.
La unidad irá al modo de descarga de firmware mediante un comando especial desde la PC.
En el modo de descarga, la pantalla de la unidad mostrará “DL-V1.00”
Durante el proceso de actualización de firmware, el nivel de avance será visible a través de
una barra a completarse en la pantalla. La operación de actualización de firmware tomárá alrededor de 3 minutos. Tras completarse la actualización se enviará un comando epecial que restaurará la unidad al
modo normal de operación.
6.24. Cambio de velocidad por default en motores Volvo
Los motores Volvo equipados con la unidad de control EMS-II tienen la velocidad de motor seleccionable a través del J1939 – CANBUS. La unidad ofrece la posibilidad al usuario de cambiar entre la velocidad primaria y secondaria usando el menú de programación. Si se incrementa el parámetro de programa “Volvo Speed Toggle”, la unidad se congelará por algunos segundos y cambiará el motor a 1800 rpm, la cual es generalmente la velocidad secundaria. Cuando el parametro se decrementa, el motor se ajusta a la velocidad primaria, la cual es generalmente 1500 rpm.
La unidad debe estar en modo OFF cuando se cambie la velocidad, de lo contrario
el cambio no se efectuará.
Se puede efectuar un ajuste fino de velocidad en un rango de ± 8 %. Puede hacerse usando el parámetro de programa “J1939 Speed Adjust”.
Manual de Usuario DKG-309-CAN-MPU V-24 (25.08.2010)(21.02.2012)
- 27 -
6.25. Modo de control de Motor
En el modo de control de motor, la unidad puede controlar un motor sin generador. El modo de control de motor se activa por un parámetro de programa en el grupo “Controller Configuration”.
Cuando el Modo de control de motor sea activado: -La unidad no mostrará parámetros de generador (volts, amps, kW y F.P.) -Las protecciones de voltaje y frecuencia del generador quedan deshabilitadas. Sin embargo las protecciones de revoluciones de motor estarán activas.
Se recomienda enfáticamente ingresar valores límite adecuados de rpms bajas y altas para habilitar la protección de velocidad del motor.
6.26. Voltaje y Frecuencia dual
La unidad ofrece 2 juegos de valores de límite de protección de voltaje y frecuencia. Se permite al usuario cambiar entre estos 2 juegos en cualquier momento.
Esta característica resulta particularmente útil en plantas de voltaje ó frecuencia dual para intercambio fácil entre estas 2 condiciones de operación. El cambio al segundo juego de valores límite puede ser hecho de 2 maneras: -Ajustando el parámetro de programa “Secondary Volt/Freq” a 1 -con señal de entrada digital Así el usuario tiene flexibilidad total para cambio manual ó externo. Si el cambio se hace con la señal de entrada digital, una de las entradas digitales tiene que ser definida como “2
nd Volt-Freq Select” usando el grupo de programa “INPUT FUNCTION SELECT“.
Los siguientes parámetros están disponibles para la selección de 2do. voltaje-frecuencia:
Límite bajo voltaje de línea Límite alto voltaje de linea Límite baja frecuencia de línea Límite alta frecuencia de línea
Límite paro por bajo voltaje planta Límite advert.bajo voltaje de planta Límiteadvert.alto voltaje de planta Límite paro por alto voltaje planta Límite paro por baja frecuencia de planta Límite advert.baja frecuencia de planta Límite advert.alta frecuencia de planta Límite paro por alta frecuencia planta Límite paro por bajas RPM planta Límiteadvert.bajas RPM planta Límiteadvert.altas RPM planta Límite paro por altas RPM de planta
Manual de Usuario DKG-309-CAN-MPU V-24 (25.08.2010)(21.02.2012)
- 28 -
6.27. Operación monofásica
Si la unidad se usa en una red electrica monofásica, se recomienda ajustar a 1 el parámetro de programa “Single Phase Enable” en el grupo CONFIGURACION de CONTROLADOR. Cuando de ajuste a 1 el parámetro “Single Phase Enable”, la unidad medirá parámetros electricos de la fase L1 tanto en planta como en ínea.
Las revisiones de voltaje y sobrecorriente se efectuarán solamente en la fase L1.
Los parámetros de las fases L2 y L3, así como los voltajes fase-a-fase serán removidos de
las pantallas.
7. PUERTO DE MONITOREO Y CONTROL J1939
La unidad ofrece un puerto especial J1939 para comunicarse con motores electronicos controlados por una Unidad de Control lectrónico (ECU por sus siglas en inglés). El puerto J1939 consta de 2 terminales las cuales son J1939+ y J1939-. La conexión entre la
unidad y el motor debe efectuarse mediantepar torcido de cable ó cable coaxial. Si se usa cable coaxial, el external conductor externo debe aterrizarse en un sólo extremo. El resistor de terminación de 120 ohms está dentro de la unidad. No conecte resistor externo.
El puerto J1939 se activa ajustando el parámetro de programa J1939 Enable a 1. El parámetro J1939 Engine Type debe ajustarse de acuerdo. La lista de motores disponibles se da en
la sección de programación. Contacte a DATAKOM para la lista de motores más reciente. Si el puerto J1939 se habilita entonces la información de presión de aceite, coolant temperatura de refrigerante y las rpm del motor son captadas desde la ECU. Se muestran otras
medidas disponibles para información, pero no tienen efecto en la operación del motor. La unidad es capaz de mostrar 21 parámetros en total desde el J1939.
Las mediciones J1939 también están disponibles para la operación Modbus. Revise el capítulo 8 para más detalles. Si la salida de combustible está activa y no se recibe información por parte de la ECU en más de 3 segundos,la unidad dará una alarma de falla “ECU FAIL” y detendrá al motor. Esta característica
evita operación fuera de control del motor. Las condiciones de falla de un motor electronico son consideradas por la unidad como advertencias y no causan el paro del motor. Se asume que el motor se encuentra protegido por la
ECU que lo detendrá cuando sea necesario. Los códigos de falla electrónicos de motor se muestran dentro de la tabla de lista de alarma en texto, junto con sus códigos SPN-FMI. Se pueden mostrar 8 códigos de falla como máximo.
La lista completa de códigos de falla está en el manual del fabricante del motor.
Manual de Usuario DKG-309-CAN-MPU V-24 (25.08.2010)(21.02.2012)
- 29 -
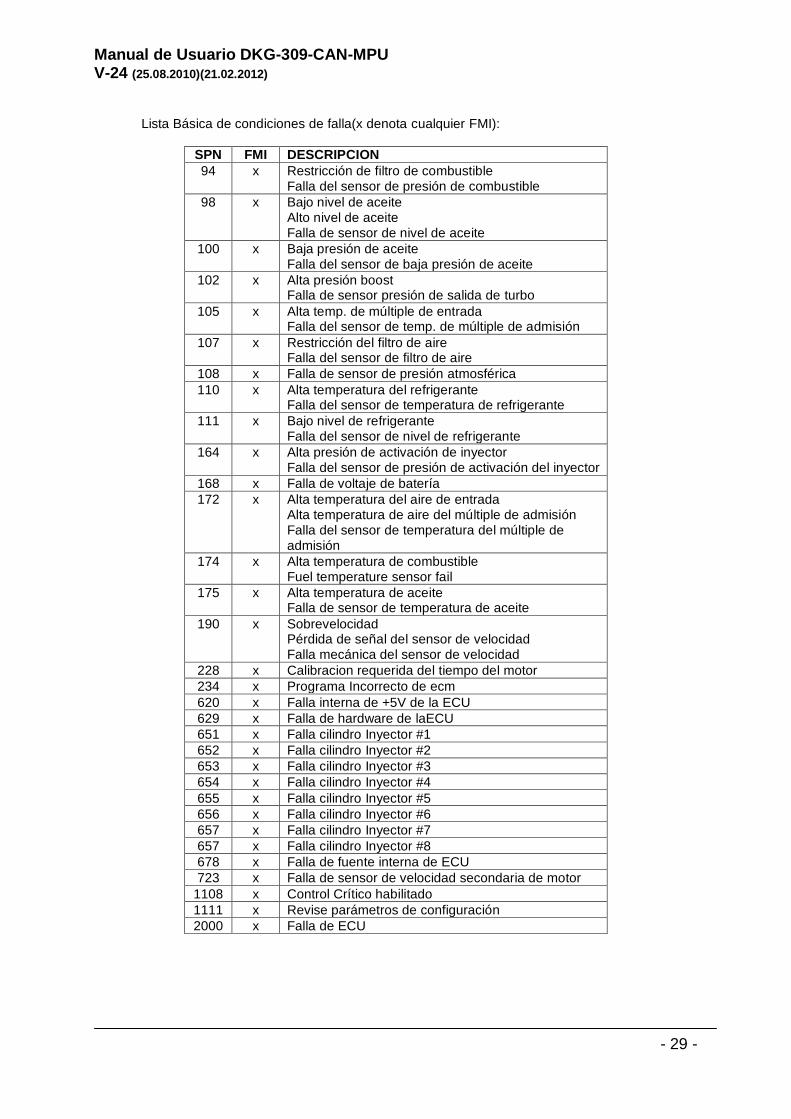
Lista Básica de condiciones de falla(x denota cualquier FMI):
SPN FMI DESCRIPCION
94 x Restricción de filtro de combustible Falla del sensor de presión de combustible
98 x Bajo nivel de aceite Alto nivel de aceite Falla de sensor de nivel de aceite
100 x Baja presión de aceite Falla del sensor de baja presión de aceite
102 x Alta presión boost Falla de sensor presión de salida de turbo
105 x Alta temp. de múltiple de entrada Falla del sensor de temp. de múltiple de admisión
107 x Restricción del filtro de aire Falla del sensor de filtro de aire
108 x Falla de sensor de presión atmosférica
110 x Alta temperatura del refrigerante Falla del sensor de temperatura de refrigerante
111 x Bajo nivel de refrigerante Falla del sensor de nivel de refrigerante
164 x Alta presión de activación de inyector Falla del sensor de presión de activación del inyector
168 x Falla de voltaje de batería
172 x Alta temperatura del aire de entrada Alta temperatura de aire del múltiple de admisión Falla del sensor de temperatura del múltiple de admisión
174 x Alta temperatura de combustible Fuel temperature sensor fail
175 x Alta temperatura de aceite Falla de sensor de temperatura de aceite
190 x Sobrevelocidad Pérdida de señal del sensor de velocidad Falla mecánica del sensor de velocidad
228 x Calibracion requerida del tiempo del motor
234 x Programa Incorrecto de ecm
620 x Falla interna de +5V de la ECU
629 x Falla de hardware de laECU
651 x Falla cilindro Inyector #1
652 x Falla cilindro Inyector #2
653 x Falla cilindro Inyector #3
654 x Falla cilindro Inyector #4
655 x Falla cilindro Inyector #5
656 x Falla cilindro Inyector #6
657 x Falla cilindro Inyector #7
657 x Falla cilindro Inyector #8
678 x Falla de fuente interna de ECU
723 x Falla de sensor de velocidad secondaria de motor
1108 x Control Crítico habilitado
1111 x Revise parámetros de configuración
2000 x Falla de ECU

Manual de Usuario DKG-309-CAN-MPU V-24 (25.08.2010)(21.02.2012)
- 30 -
A continuación se muestra una lista básica de códigos FMI. Tome en cuenta que estos códigos pueden variar poco dependiendo de la marca y modelo del motor.
FMI DESCRIPCION
0 “Value too high” dato válido, pero arriba del rango normal de trabajo
1 “Value too low” dato válido, pero abajo del rango normal de trabajo
2 “Faulty data” datos intermitentes ó fallidos ó corto circuito al voltaje de batería del lado de alto voltaje del inyector
3 “Electrical fault” Voltaje anormalmente alto ó corto circuito al voltaje de batería del lado de bajo voltaje del inyector
4 “Electrical fault” Voltaje anormalmente bajo ó corto circuito a negativo de batería,lado de alto ó bajo voltaje del inyector
5 “Electrical fault” Corriente anormalmente baja ó circuito abierto
6 “Electrical fault”Corriente anormalmente alta ó corto circuito al negativo de batería
7 “Mechanical fault” Respuesta fallida del sistema mecánico
8 “Mechanical or electrical fault” Frecuencia anormal
9 “Communication fault” Relación de actualización anormal ó circuito abierto en el inyector
10 “Mechanical or electrical fault” Variaciones anormalmente grandes
11 “Unknown fault” Falla no identificada
12 “Component fault” Componente ó unidad fallida
13 “Faulty calibration” Valores de Calibration fuera de los límites
14 “Unknown fault” Instrucciones especiales
15 Dato valido pero arriba del rango normal de operación– nivel menos severo level
16 Dato valido pero arriba del rango normal de operación– nivel moderadamente severo
17 Dato valido pero abajo del rango normal de operación– nivel menos severo level
18 Dato valido pero abajo del rango normal de operación– nivel moderadamente severo
19 Dato recibido de red con error
20 no usado (reservado)
21 no usado (reservado)
22 no usado (reservado)
23 no usado (reservado)
24 no usado (reservado)
25 no usado (reservado)
26 no usado (reservado)
27 no usado (reservado)
28 no usado (reservado)
29 no usado (reservado)
30 no usado (reservado)
31 Existe Condición

Manual de Usuario DKG-309-CAN-MPU V-24 (25.08.2010)(21.02.2012)
- 31 -
8. COMUNICACION MODBUS
La unidad ofrece la possibilidad de comunicación MODBUS via su puerto serial RS232. La conexión al MODBUS maestro puede hacerse de 3 maneras: 1) Conexión RS232 usando directamente el puerto RS232 provisto. 2) RS422/485 connection usando el convertidor externo RS422/485. 3) Modem connection using external modem. El modo MODBUS se activa asignando una dirección de controlador a la unidad usando el parámetro de programa “MODBUS Address”. El rango posible de dirección va de 1 a 144. Ajustando
la dirección a 0 deshabilitará el modo MODBUS y permitirá la comunicación bajo el protocolo RAINBOW. Las propiedades MODBUS de la unidad son: -Modo de transferencia de datos: RTU -Datos Seriales: 9600 bps, datos de 8 bit, sin paridad, 1 bit de parada -Funciones soportadas: -Función 3 (Leer registros multiples) -Función 6 (Escribir registro sencillo) La descripción detallada acerca del protocolo MODBUS se encuentra en el documento “Modicon Modbus Protocol Reference Guide”. La dirección es: www.modbus.org/docs/PI_MBUS_300.pdf A continuación se muestra una lista corta de registros leíbles. Para el Manual detallado de Aplicación MODBUS y una lista completa de registros contacte a DATAKOM.
DIRECCION (hex)
R / W
Tamaño DATO
COEFICIENTE DESCRIPCION
0000 R 16bit x1 Voltaje fase L1 línea
0001 R 16bit x1 Voltaje fase L2 línea
0002 R 16bit x1 Voltaje fase L3 línea
0003 R 16bit x1 Voltaje fase L1 planta
0004 R 16bit x1 Voltaje fase L2 planta
0005 R 16bit x1 Voltaje fase L3 planta
0006 R 16bit x1 Corriente fase L1 planta
0007 R 16bit x1 Corriente fase L2 planta
0008 R 16bit x1 Corriente fase L3 planta
000C R 16bit x1 Voltaje fase L12 línea
000D R 16bit x1 Voltaje fase L23 línea
000E R 16bit x1 Voltaje fase L31 línea
000F R 16bit x1 Voltaje fase L12 Planta
0010 R 16bit x1 Voltaje fase L23 Planta
0011 R 16bit x1 Voltaje fase L31 Planta
0012 R 16bit x10 Frecuencia de línea
0013 R 16bit x10 Frecuencia de planta
0016-0017 R 32bit x256 Potencia aciva de planta: este registro firmado de 24 bit retiene la potencia activa de la planta multiplicada X 256. Los 16 bits menos significativos están en el registro 0016h. Los 8 bits más significativos están en el registro 0017h.
0018 R 8bit x100 Factor de Potencia X 100 (byte firmado). Valores Negativos indican un F.P. capacitivo.
002A R 16bit x1 Revoluciones (rpm)
002B R 16bit x10 Presión de aceite en bares.
002C R 16bit x1 Temperatura de refrigerante en grados C.
002D R 16bit x1 Nivel de combustible como %
002F R 16bit x10 Voltaje de batería
003D R 8bit - Modo de Operación bit_3: modo “manual” bit_4: modo “auto” bit_5: modo “off” bit_6: modo “test” bit_7: modo “load test”

Manual de Usuario DKG-309-CAN-MPU V-24 (25.08.2010)(21.02.2012)
- 32 -
9. TABLA DE OPERACION SEMANAL
En la mayoría de las aplicaciones, se requiere que la planta opere solamente en horas hábiles. Gracias a la característica de programa semanal se puede prohibir la operación de la planta en horarios indeseables. La unidad tiene un par de tiempos programables de encendido/apagado para cada día de la semana. Estos parámetros programables permiten que la planta opere automaticamente sólo dentro de los límites de tiempo permitidos. La tabla de operación semanal se activa solamente en modo AUTO. En otros modos no afectará la operación de la planta.
Si la operación de la planta en modo AUTO queda deshabilitada por la tabla de operación semanal, el led AUTO parpadeará (en lugar de encender fijo). Cada tiempo de encendido/apagado se define en pasos de 10 minutos. Los programas sin usar deben ajustarse a 24:00. Ejemplo de ajuste:
Monday Turn_on 07:00
Monday Turn_off 18:00
Tuesday Turn_on 07:00
Tuesday Turn_off 18:00
Wednesday Turn_on 07:00
Wednesday Turn_off 18:00
Thursday Turn_on 07:00
Thursday Turn_off 18:00
Friday Turn_on 07:00
Friday Turn_off 18:00
Saturday Turn_on 07:00
Saturday Turn_off 13:00
Sunday Turn_on 24:00 (Domingo sin encendido, permanece último modo)
Sunday Turn_off 24:00 (Domingo sin apagado, permanece último modo)
Si se usa el mismo tiempo para encendido y apagado será considerado como tiempo de encendido. La unidad cuenta con un circuito de reloj de tiempo real con soporte de batería. El reloj de tiempo real continuará su funcionamiento aunque falle la energía. Puede ajustarse con precisión usando el parámetro de programa “Real Time Clock Adjust”. Para más detalles revise la sección de
programación.

Manual de Usuario DKG-309-CAN-MPU V-24 (25.08.2010)(21.02.2012)
- 33 -
10. REGISTRO DE EVENTOS
La unidad mantiene registro de los últimos 200 eventos para proveer información para el personal de
servicio.
La información del estado de la planta y un juego extenso de valores medidos son guardados dentro de la memoria de eventos. Los eventos se graban con una estampa de tiempo que viene del circuito de reloj de tiempo real de la unidad.
Los eventos son guardados en una memoria circular. Esto significa que un nuevo evento borrará al evento más viejo. Los eventos siempre se muestran partiendo del más reciente.
Los Eventos son retenidos en una memoria no volátil por lo que no resultan afectados por fallas de energía.
Para cambiar de una pantalla a otra se usan los botones◄MENU y MENU►.
Cuando se muestre la pantalla “EVENT RECORD”, cada depresión del botón ◄MENU hace que la
pantalla cambie al evento previo y el botón MENU► hace que cambie al siguiente.
Para salir de las hojas de registro de eventos mantenga presionados los botones
◄MENU ó MENU►.
Cada evento se muestra en 4 páginas. Los números de evento y página se muestran en la parte
superior derecha de la pantalla. Los Eventos están numerados empezando por el 1, siendo el 1 el
más reciente. Las páginas están listadas de la A a la D. La Navegación entre diferentes páginas del
mismo evento se efectúa con los botones ▼y ▲.
Las fuentes de Evento son: -Alarmas de paro, alarmas de bote de carga, Advertencias -Cambio de modo de Operación (OFF, AUTO, etc…) -Registros periódicos. El contenido del evento consiste en:
Tipo de Evento (alarmas, cambio de modo, periódico, etc…) Fecha y hora Modo de operación de la planta (AUTO, MANUAL,OFF,TEST, LOAD TEST) Estado de operación de la planta (línea ok, funcionando, enfriamiento etc…) Voltajes de fases de planta L1-L2-L3 Corrientes de fases de planta L1-L2-L3 Frecuencia de planta Potencia activa de planta (KW) Factor de Potencia de planta Revoluciones de motor (rpm) Presión de aceite Temperatura de refrigerante Nivel de combustible Voltaje de batería Voltajes de las fases de línea L1-L2-L3 Frecuencia de línea Estado de las entradas digitales Estado de la entrada de carga
Manual de Usuario DKG-309-CAN-MPU V-24 (25.08.2010)(21.02.2012)
- 34 -
11. CONTADORES ESTADISTICOS
La unidad provee un juego de contadores ascendentes no restablecibles para propósitos estadísticos. Los contadores consisten en: -Horas totales de motor -KWh totales de planta -Horas de motor para servicio -Tiempo para servicio (en días) -Intentos de arranque de motor totales -Operaciones de planta totales Estos contadores se retienen en una memoria no volátil y no resultan afectados por fallas de energía.
12. MANTENIMIENTO
NO ABRA LA UNIDAD
No hay partes reemplazables dentro de la unidad.
Limpie la unidad con un paño suave y húmedo. No use agentes químicos

Manual de Usuario DKG-309-CAN-MPU V-24 (25.08.2010)(21.02.2012)
- 35 -
13. PROGRAMACION
El modo de programación se usa para establecer temporizadores, límites operacionales y la
configuración de la unidad. Para entrar al modo de programación, presione juntos los botones
◄MENU y MENU► por 1 segundo. El modo de programación sólo se permite si la entrada
“PROGRAM LOCK” se deja abierta. Si esta entrada está conectada a TIERRA, la modificación del
dato de programa se deshabilitará para evitar intervención no autorizada. Se sugiere que se
mantenga esta entrada conectada a TIERRA.
Cuando se ingresa al modo de programación, se muestra la siguiente pantalla:
Debe ingresar una contraseña de 4 dígitos usando los botones ▼, ▲ , MENU►y ◄MENU.
La unidad guarda 3 contraseñas diferentes. Cada contraseña permite acceso a diferente nivel
de parametros de programa.
La contraseña de nivel-1 permite acceso a parámetros de ajuste en campo. El nivel-2 permite
acceso a ajustes de fábrica. El nivel-3 está reservado para Datakom y permite accesa a parámetros
de calibración.
La contraseña de nivel-1 viene de fábrica como ‘1234’ y la de nivel -2 viene ajustada a‘9876’.
Las contraseñas sólo pueden modificarse mediante el programa Rainbow.
El modo de programación no afectará la operación de la unidad. Por ello los programas
pueden modificarse cuando sea, aún cuando la planta esté funcionando.
El modo de programación se maneja con un sistema de menú de dos niveles. El menu
superior consta de grupos de programa y cada grupo consta de varios parámetros de programa.
Cuando se ingrese al modo de programación, se mostrará una lista de grupos disponibles. La
Navegación entre diferentes grupos se hace con los botones ▼y ▲. El grupo seleccionado se
muestra en video inverso (azul en blanco). Para entrar a un grupo, presione el botón MENU►. Para
salir del grupo hacia la lista principal presione el botón ◄MENU.La navegación dentro de un grupo se
hace también con los botones ▼y ▲. Se mostrará una lista de parámetros disponibles. El parametro
seleccionado se muestra en video inverso. Para mostrar/cambiar el valor de este parametro, presione
el botón MENU►. El valor del parametro puede ser incrementado y decrementado con los botones
▼y ▲. Si estas teclas se presionan juntas, el valor de programa será incrementado/decrementado en
pasos de 10. Cuando se modifica un parámetro de programa, es automaticamente guardado en la
memoria. Si se presiona el botón MENU►, el siguiente parámetro será mostrado. Si se presiona el
botón ◄MENU, entonces se mostrará la lista de parametros en este grupo.
Los parametros de programa se guardan en una memoria no volátil y no les afectan las fallas de energía.
Para salir del modo de programación presione una de las teclas de selección de modo. Si no se presiona ningún botón durante 1 minuto el modo de programación se cancelará automáticamente.

Manual de Usuario DKG-309-CAN-MPU V-24 (25.08.2010)(21.02.2012)
- 36 -
Grupo de programa: Configuración de controlador
Definición de Parámetro, (Nivel
de contraseña)
Unidad Ajuste fabrica
Descripción
1
(1) Contraste Pant.
LCD - 22
Se usa para ajustar el contraste LCD. Ajuste para mejorar la visibilidad.
2 (2) Seleccion de
Idioma - 0
0: Inglés. 1: Turco. Este idioma depende del país donde se pretenda usar la unidad. 2: Chino 3: La unidad solicitará selección manual de idioma al energizarse.
3 (2) Secund., Tens y Frecc.
- 0 0: Use límites primarios de voltaje/frecuencia 1: Use límites secundarios de voltaje/frecuencia
4 (2) Monofasico Activada
- 0 0: Sistema trifásico 1: Sistema monofásico
5 (2) Tensiones Linea-
Linea - 0
0: Muestra voltajes Linea a Neutro por default 1: Muestra voltajes Linea a Linea por default
6 (1) Despliegue STD Gen.
- 0
Este parámetro selecciona la pantalla mostrada durante la operación de la planta bajo carga. 0: Pantalla 3 (ó 4) datos electricos, letra grande 1: Pantalla 5 datos de motor, letra grande 2: Pantalla 6 (ó7) máxima información,letra chica 3: Pantalla 8 (ó 9)
Detalles de cada pantalla se explican en el cap. 3.2
7 (2) Solo Control
Motor - 0
0: Control de planta 1: Control de motor (sin generador)
8 (2) Falla Temp. Holdoff
Seg. 12 Este parámetro define el retraso después del arranque del motor y el momento en que se habilita el monitoreo de falla.
9 (1) Temporiz. Rele
Alarma Seg. 60
Este es el tiempo durante el cual el relevador de ALARMA está activo. Si se ajusta a a 0, significa que el
tiempo es ilimitado.
10 (1) Rele Alarma
Interm - 0
0: contínuo 1: intermitente (Prende y apaga cada segundo)
11 (2) Parada
Alternador Carga - 0
0: La entrada de carga genera una advert. “CHARGE FAIL”, y no detiene al motor. 1: La entrada de carga genera una alarma “CHARGE FAIL”, y detiene al motor.
12 (1) Modo Respaldo
Emergencia - 1
0: Bajo el modo TEST, la carga no será transferida a la
planta aunque falle la línea. 1: Bajo el modo TEST, la carga será transferida a la
planta si falla la línea.

Manual de Usuario DKG-309-CAN-MPU V-24 (25.08.2010)(21.02.2012)
- 37 -
Grupo de programa: Configuración de controlador (continúa)
Definición de Parámetro, (Nivel de contraseña)
Unid. Ajuste fabrica
Descripción
13 (1) Dia/Hora Ejercicio - 168
Este parametro define el día y hora del ejercicio. Los valores mayores ó iguales a 168 significan que el ejercitador está apagado. El ejercicio puede seleccionarse para arrancar al comienzo de cualquier hora de la semana. El valor del parametro es el conteo de hora de una semana completa. Ejemplos: 0 = el ejercicio comienza el Lunes 00:00 8 = el ejercicio comienza el Lunes 08:00 24 = el ejercicio comienza el Martes 00:00 167 = el ejercicio comienza el Domingo 23:00 168 = ejercitador apagado Si se selecciona ejercicio diario en “exercise period”, la información de día es irrelevante y será efectuado diariamente sin importar esta selección de día. Si se selecciona ejercicio mensual en “exercise period”, entonces será efectuado durante los primeros 7 días de cada mes a la hora y día programados.
14
(1) Duracion Ejercicio min 10 Este parámetro define la duración del ejercicio y se programa en pasos de 10 minutos hasta 24 horas.
15
(1) Ejercicio c/s Carga - 0 0: Ejercicio en modo TEST 1: Ejercicio en modo LOAD TEST
16 (1) Periodo de Ejercicio - 1
0: Ejercicio diario 1: Ejercicio una vez a la semana 2: Ejercicio una vez al mes.
17
(2) Demora Simulación de
Red - 0
0: La entrada AUX-2 tiene función normal 1: La entrada AUX-2 tiene función de simulación
retardada de línea. Vea capítulo 6.8 para más info.
18
(2) Modem Activado
- 0
0: Sin conexión de modem, el puerto serial se
conecta a PC 1: Modem conectado.
19
(2) SMS Activado - 0 0: SMS sin habilitar 1: SMS habilitado
20
(2) Llamada GPRS
Activada - 0
0: Llamadas estandard de modem 1: Llamadas de módem GPRS
21
(2) Direccion MODBUS - 0
0: Protocolo de comunicación RAINBOW. 1-144: Comunicación MODBUS. Este parametro
también es la dirección del controlador MODBUS de la unidad.
22 (1) Presion de Aceite “psi” - 0
0: Muestra presión de aceite en bares 1: Muestra presión de aceite en psi
23 (1) “Temperatura en °F” - 0
0: Muestra temperatura en grados C 1: Muestra temperatura en grados F
24 (2) Temporiz. Rele Plus horas 0
Operación de simulación retardada de línea: máximo tiempo de operación de planta después que desaparece la señal de simulación de línea. Sistemas duales de planta: tiempo de relevador op. “palanca”. Contacte a DATAKOM para operación dual alternada de plantas de emergencia.

Manual de Usuario DKG-309-CAN-MPU V-24 (25.08.2010)(21.02.2012)
- 38 -
Grupo de programa: Configuración de controlador (continúa)
Definición de Parámetro, (Nivel de contraseña)
Uni-dad
Ajuste fabrica
Descripción
25 (1) Ajuste de Reloj - 117
Este parametro ajusta la precisión delcircuito de reloj en tiempo real. Los valores de 0 a 63 aceleran el reloj en pasos de 0.25seg/día. Los valores de 127 a 64 desaceleran el reloj en pasos de 0.25seg/día.
26 (2) Histeresis de
Tension V 8
Este parametro provee cierta histéresis a los límites de voltaje de línea y planta para evitar decisiones erróneas. Por ejemplo, cuando la línea está presente, el límite bajo de voltaje de línea es el programado, pero cuando falle la línea, el límite bajo será incrementado por este valor. Se recomienda ajustar este valor a 8 volts.
27 (2) RPM a partir de HZ - 1
Este parametro se usa para la conversion de la frecuencia del generador a revoluciones del motor. 0: Lee rpm desde la ent. opcional de captador mag. 1: Convierte frecuencia a rpm (usando el numero de dientes de la cremallera)
28 (2) Numero de Dientes
Corona - 30
Este es el número de pulsos generados por el captador magnetico en una vuelta del volante de inercia. Se usa también en la conversión de la frecuencia del generador a las rpm del motor. La frecuencia en Hz se multiplica por este parametro durante la conversión a rpm.
29 (2) “SMS de cambios de
Red. - 0
Este parametro controla el envío SMS cuando cambia el estado de voltaje de la línea. No se genera advertencia. 0: no SMS cuando falle ó regrese la línea 1: SMS enviado cuando falle ó regrese la línea
30
(2) Lim. Bajo Bomba de Comb.
% 20 Si el nivel de comb.medido desde la entrada del enviador cae debajo de este nivel, la función FUEL PUMP se volverá activa.
31
(2) Lim Alto Bomba de
Comb. % 80
Si el nivel de comb.medido desde la entrada del enviador excede este nivel, la función FUEL PUMP se volverá pasiva.
32 (2) Falla Sensor de Presion - 0
0: Sin efecto 1:Advertencia 2:Bote de carga
33
(2) Falla Sensor de Temperatura
- 0 0: Sin efecto 1:Advertencia 2:Bote de carga
34 (2) Falla Sensor Comb. - 0
0: Sin efecto 1:Advertencia 2:Bote de carga
-
-

Manual de Usuario DKG-309-CAN-MPU V-24 (25.08.2010)(21.02.2012)
- 39 -
Grupo de programa: Parámetros eléctricos
Definición de Parámetro, (Nivel de contraseña)
Unid Aj. Fabr.
Descripción
1 (2) Relacion Transf. Corr. A 500
Este es el valor nominal de los transformadores de corriente. Todos deben tener el mismo valor El secundario del transformador será de 5 Amps.
2
(2) Limite Sobre Corriente A 0
Si la corriente excede este límite, durante el periodo definido en “Overload Timeout” se generará una alarma “Overcurrent Load Dump”. Si este dato es 0 la sobrecorriente se deshabilitará.
3
(2) Lim. Exceso Potencia KW 0
Si la potencia activa excede este límite, durante el periodo definido en “Overload Timeout” se generará una alarma “Excess Power Load Dump”.
Si se ajusta a 0 se deshabilita la revisión de Potencia is.
4 (2) Atraso Alarma
Sobrecarga seg 5
Este es el tiempo en el que la potencia activa puede salirse de límite sin existir disparo de alarma ó bote de carga “OVERCURRENT” ó “EXCESS POWER” .
Lo mismo ocurre con las alarmas de velocidad“OVERSPEED” ó “UNDERSPEED”.
Este es también el tiempo en el que se pueden salir de límite los voltajes de planta sin existir aún disparo de alarmas como “HIGH VOLTAGE” ó “LOW VOLTAGE”.
5 (1) Tension RED Lim Bajo V 170
Si una de las fases de línea cae debajo de este límite, significa que la línea queda fuera y la unidad transfiere a la planta en modo AUTO.
6 (1) Tension RED Lim Alto V 270
Si una de las fases de línea excede este límite, significa que la línea queda fuera y la unidad transfiere a la planta en modo AUTO.
7 (2) Frecuencia RED Bajo Hz 45
Si la frecuencia de línea cae bajo este límite, significa que la línea queda fuera y la unidad transfiere a la planta en modo AUTO.
8 (2) Frecuencia RED Alto Hz 55
Si la frecuencia de línea excede este límite, significa que la línea queda fuera y la unidad transfiere a la planta en modo AUTO.
9
(2) Paro Bajo Volt Gen. V 190
Si uno de los voltajes de las fases de generador cae bajo este límite cuando alimente la carga, generará una alarma de paro “GENSET LOW VOLTAGE” y el motor
parará.
10 (2) Aviso Bajo Volt Gen. V 200
Si uno de los voltajes de las fases de generador cae bajo este límite cuando alimente la carga, generará una advertencia “GENSET LOW VOLTAGE”.
11
(2) Aviso Alto Volt Gen.
V 250 Si uno de los voltajes de las fases de generator excede este límite cuando alimente la carga, generará una advertencia “GENSET HIGH VOLTAGE”.
12 (2) Paro Alto Volt Gen. V 260
Si uno de los voltajes de las fases de generador excede este límite cuando alimente la carga, generará una alarma “GENSET HIGH VOLTAGE” y el motor parará.
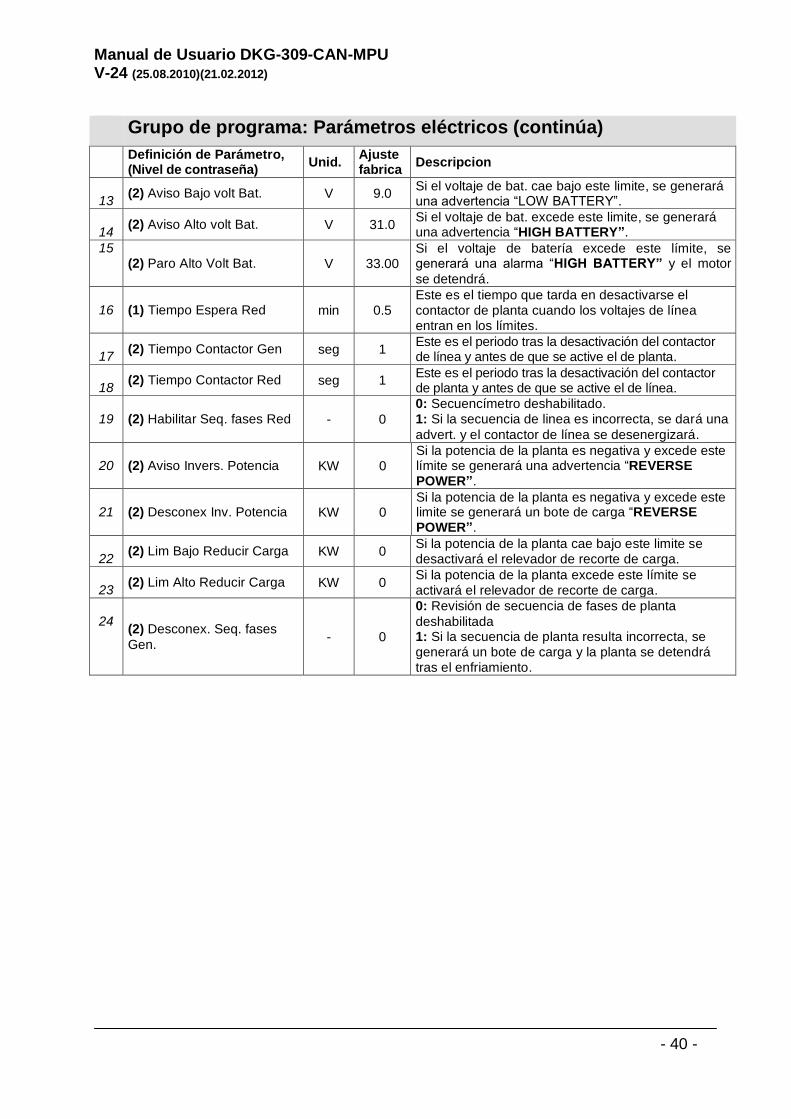
Manual de Usuario DKG-309-CAN-MPU V-24 (25.08.2010)(21.02.2012)
- 40 -
Grupo de programa: Parámetros eléctricos (continúa)
Definición de Parámetro, (Nivel de contraseña)
Unid. Ajuste fabrica
Descripcion
13
(2) Aviso Bajo volt Bat. V 9.0 Si el voltaje de bat. cae bajo este limite, se generará una advertencia “LOW BATTERY”.
14
(2) Aviso Alto volt Bat. V 31.0 Si el voltaje de bat. excede este limite, se generará una advertencia “HIGH BATTERY”.
15 (2) Paro Alto Volt Bat. V 33.00
Si el voltaje de batería excede este límite, se generará una alarma “HIGH BATTERY” y el motor
se detendrá.
16 (1) Tiempo Espera Red min 0.5
Este es el tiempo que tarda en desactivarse el contactor de planta cuando los voltajes de línea entran en los límites.
17
(2) Tiempo Contactor Gen seg 1 Este es el periodo tras la desactivación del contactor de línea y antes de que se active el de planta.
18
(2) Tiempo Contactor Red seg 1 Este es el periodo tras la desactivación del contactor de planta y antes de que se active el de línea.
19 (2) Habilitar Seq. fases Red - 0
0: Secuencímetro deshabilitado. 1: Si la secuencia de linea es incorrecta, se dará una
advert. y el contactor de línea se desenergizará.
20 (2) Aviso Invers. Potencia KW 0
Si la potencia de la planta es negativa y excede este límite se generará una advertencia “REVERSE POWER”.
21 (2) Desconex Inv. Potencia KW 0
Si la potencia de la planta es negativa y excede este limite se generará un bote de carga “REVERSE POWER”.
22
(2) Lim Bajo Reducir Carga KW 0 Si la potencia de la planta cae bajo este limite se desactivará el relevador de recorte de carga.
23
(2) Lim Alto Reducir Carga KW 0 Si la potencia de la planta excede este límite se activará el relevador de recorte de carga.
24
(2) Desconex. Seq. fases
Gen. - 0
0: Revisión de secuencia de fases de planta
deshabilitada 1: Si la secuencia de planta resulta incorrecta, se generará un bote de carga y la planta se detendrá tras el enfriamiento.

Manual de Usuario DKG-309-CAN-MPU V-24 (25.08.2010)(21.02.2012)
- 41 -
Grupo de programa: Parámetros eléctricos (continúa)
Definición de Parámetro, (Nivel de contraseña)
Unid. Ajuste fabrica
Descripción
25 (2) 2nd
Limite sobre
Corriente” A 0
Cuando los límites secundarios v/f están activos:
Si la corriente excede este límite, durante el tiempo definido en “Overload Timeout” se generará una alarma “Overcurrent Load Dump”.
Si este parametro es 0 la sobrecorriente se deshabilitará.
26 (1) 2
nd Tens. Red Lim Bajo V 170
Cuando los límites secundarios v/f están activos: Si uno de los voltajes de las fases de línea caen bajo este limite, significa que la línea está fuera y la unidad transfiere a la planta en modo AUTO.
27 (1) 2
nd Tens. Red Lim Alto V 270
Cuando los límites secundarios v/f están activos:
Si uno de los voltajes de las fases de línea excede este limite, significa que la línea está fuera y la unidad transfiere a la planta en modo AUTO.
28 (2) 2
nd Frec. Limite Bajo Hz 45
Cuando los límites secundarios v/f están activos:
Si la frecuencia de línea cae bajo este limite, significa que la línea está fuera y la unidad transfiere a la planta en modo AUTO.
29 (2) “2
nd Frec. Limite Alto Hz 55
Cuando los límites secundarios v/f están activos:
Si la frecuencia de línea excede este limite, significa que la línea está fuera y la unidad transfiere a la planta en modo AUTO.
30 (2) “2nd
Paro bajo Volt Gen. V 190
Cuando los límites secundarios v/f están activos:
Si uno de los voltajes de las fases de generador cae bajo este limite cuando alimente la carga, generará una alarma de paro “GENSET LOW VOLTAGE” y el
motor se detendrá.
31 (2) “2
nd Aviso Bajo Volt. Gen. V 200
Cuando los límites secundarios v/f están activos:
Si uno de los voltajes de las fases de generador cae bajo este limite cuando alimente la carga, generará una advertencia “GENSET LOW VOLTAGE”.
32 (2) “2nd
Aviso Alto Volt. Gen. V 250
Cuando los límites secundarios v/f están activos: Si uno de los voltajes de las fases de generador excede este limite cuando alimente la carga, generará una advertencia “GENSET HIGH VOLTAGE”.
33 (2) “2nd
Paro Alto Volt Gen. V 260
Cuando los límites secundarios v/f están activos:
Si uno de los voltajes de las fases de generator excede este limite cuando alimente la carga, generará una alarma “GENSET HIGH VOLTAGE” y
el motor se detendrá.
34
35

Manual de Usuario DKG-309-CAN-MPU V-24 (25.08.2010)(21.02.2012)
- 42 -
Grupo de programa: Parámetros de motor
Definición de Parámetro, (Nivel de contraseña)
Unidad Ajuste fabrica
Descripción
1
(2) Paro Baja
Frecuencia Hz 30
Si la frecuencia de la planta cae bajo este limite, generará una alarma “GENSET LOW SPEED” y el
motor se detendrá.
2
(1) Aviso Baja
Frecuencia Hz 35
Si la frecuencia de la planta cae bajo este limite, generará una advertencia “GENSET LOW SPEED”.
3
(1) Aviso Alta
Frecuencia Hz 54
Si la frecuencia de la planta excede este limite, generará una advertencia “GENSET HIGH SPEED”.
4
(2) Paro Alta Frecuencia
Hz 55 Si la frecuencia de la planta excede este limite, gnerará una alarma “GENSET HIGH SPEED” y el motor se detendrá.
5
(1) Aviso Baja
Presion bar 1.4
Si la presión de aceite medida desde la entrada analoga cae bajo este límite, generará una advertencia “LOW OIL PRESSURE SENDER”.
6
(2) Paro Baja
Presion bar 1.0
Si la presión de aceite medida desde la entrada analoga cae bajo este limite, generará una alarma LOW OIL PRESSURE SENDER y el motor parará.
7
(1) Aviso Alta Temperatura
°C 95 Si la temperatura de refrigerante medida desde la entrada analoga cae bajo este limite, generará una advertencia “HIGH TEMPERATURE SENDER”.
8 (2) Paro Alta
Temperatura °C 98
Si la temperatura de refrigerante medida desde la entrada analoga excede este limite, generará una alarma “HIGH TEMPERATURE SENDER” y el motor
parará.
9
(2) Tipo Sensor Presion
- 1
Este parametro selecciona el tipo de enviador de presión de aceite. 0: Enviador No estandard. Sus características se definen en la tabla “Sender Characteristics”. 1: VDO 0-7 bares (10-180 ohms) 2: VDO 0-10 bares (10-180 ohms) 3: MURPHY, DATCON 0-7 bares (240-33 ohms) 4: DATCON 0-10 bares (240-33 ohms) 5: DATCON 0-7 bares (0-90 ohms) 6: DATCON 0-10 bares (0-90 ohms) 7: DATCON 0-7 bares (75-10 ohms)
10
(2) Tipo Sensor Temp. Rad.
- 1
Este parametro selecciona el tipo de enviador de temperatura: 0: Las caracteristicas del enviador se definen enla tabla “Sender Characteristics”. 1: VDO 2: Tipo DATCON DAH 3: Tipo DATCON DAL
11
(2) Temp. Calentar
Motor °C 0
Se usa si se requiere que el motor opere sin carga hasta alcanzar cierta temperatura definida aquí Si la temperatura de refrigerante cae bajo este parametro,generará una advertencia “Engine Low Temperature”.
12 (2) Demora para
Arranque seg 0
Este es el tiempo entre la falla de línea y el encendido del solenoide de combustible antes de arrancar la planta. Evita operación de la planta en cargas respaldadas por batería.
13
(2) Tiempo
Precalentar seg 1
Tiempo en el que el solenoide de combustible se activa antes que arranque la planta. En este tiempo la salida de relevador PREHEAT se activa (si se asignó

Manual de Usuario DKG-309-CAN-MPU V-24 (25.08.2010)(21.02.2012)
- 43 -
en “Relay Definitions”)
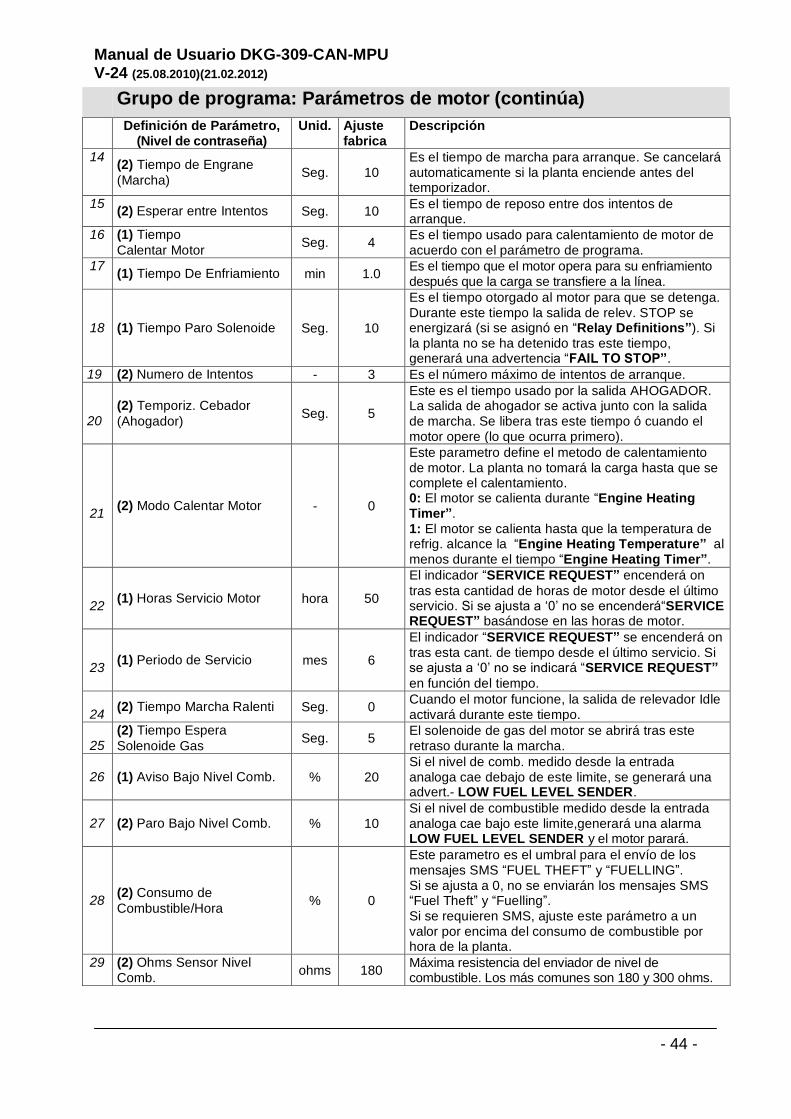
Manual de Usuario DKG-309-CAN-MPU V-24 (25.08.2010)(21.02.2012)
- 44 -
Grupo de programa: Parámetros de motor (continúa)
Definición de Parámetro, (Nivel de contraseña)
Unid. Ajuste fabrica
Descripción
14 (2) Tiempo de Engrane
(Marcha) Seg. 10
Es el tiempo de marcha para arranque. Se cancelará automaticamente si la planta enciende antes del temporizador.
15 (2) Esperar entre Intentos Seg. 10
Es el tiempo de reposo entre dos intentos de arranque.
16 (1) Tiempo
Calentar Motor Seg. 4
Es el tiempo usado para calentamiento de motor de acuerdo con el parámetro de programa.
17 (1) Tiempo De Enfriamiento min 1.0
Es el tiempo que el motor opera para su enfriamiento después que la carga se transfiere a la línea.
18 (1) Tiempo Paro Solenoide Seg. 10
Es el tiempo otorgado al motor para que se detenga. Durante este tiempo la salida de relev. STOP se energizará (si se asignó en “Relay Definitions”). Si la planta no se ha detenido tras este tiempo, generará una advertencia “FAIL TO STOP”.
19 (2) Numero de Intentos - 3 Es el número máximo de intentos de arranque.
20 (2) Temporiz. Cebador
(Ahogador) Seg. 5
Este es el tiempo usado por la salida AHOGADOR. La salida de ahogador se activa junto con la salida de marcha. Se libera tras este tiempo ó cuando el motor opere (lo que ocurra primero).
21 (2) Modo Calentar Motor - 0
Este parametro define el metodo de calentamiento de motor. La planta no tomará la carga hasta que se complete el calentamiento. 0: El motor se calienta durante “Engine Heating Timer”. 1: El motor se calienta hasta que la temperatura de refrig. alcance la “Engine Heating Temperature” al menos durante el tiempo “Engine Heating Timer”.
22 (1) Horas Servicio Motor hora 50
El indicador “SERVICE REQUEST” encenderá on
tras esta cantidad de horas de motor desde el último servicio. Si se ajusta a ‘0’ no se encenderá“SERVICE REQUEST” basándose en las horas de motor.
23 (1) Periodo de Servicio mes 6
El indicador “SERVICE REQUEST” se encenderá on tras esta cant. de tiempo desde el último servicio. Si se ajusta a ‘0’ no se indicará “SERVICE REQUEST”
en función del tiempo.
24
(2) Tiempo Marcha Ralenti Seg. 0 Cuando el motor funcione, la salida de relevador Idle activará durante este tiempo.
25
(2) Tiempo Espera
Solenoide Gas Seg. 5
El solenoide de gas del motor se abrirá tras este retraso durante la marcha.
26 (1) Aviso Bajo Nivel Comb. % 20
Si el nivel de comb. medido desde la entrada analoga cae debajo de este limite, se generará una advert.- LOW FUEL LEVEL SENDER.
27 (2) Paro Bajo Nivel Comb. % 10
Si el nivel de combustible medido desde la entrada analoga cae bajo este limite,generará una alarma LOW FUEL LEVEL SENDER y el motor parará.
28 (2) Consumo de
Combustible/Hora % 0
Este parametro es el umbral para el envío de los mensajes SMS “FUEL THEFT” y “FUELLING”. Si se ajusta a 0, no se enviarán los mensajes SMS “Fuel Theft” y “Fuelling”. Si se requieren SMS, ajuste este parámetro a un valor por encima del consumo de combustible por hora de la planta.
29 (2) Ohms Sensor Nivel Comb.
ohms 180 Máxima resistencia del enviador de nivel de combustible. Los más comunes son 180 y 300 ohms.

Manual de Usuario DKG-309-CAN-MPU V-24 (25.08.2010)(21.02.2012)
- 45 -
Grupo de programa: Parámetros de motor (continúa)
Definición de Parámetro, (Nivel de contraseña)
Unid. Ajuste fabrica
Descripción
30 (3) Freq. Control Engrane Hz 10.0
Cuando la frecuencia de planta alcanza este limite, se supone que el motor funciona y se libera la marcha.
31 (2) “Control Engrane por
Pres. - 0
0: sin saque de marcha por presión de aceite 1: la marcha sale cuando se abre el interruptor de
presión ó cuando la presión medida está arriba del límite de paro.
32 (2) Control Engrane por Alt - 0
0: sin saque de marcha por alternador de carga 1: la marcha sale cuando el voltaje del alternador de carga se establece.
33 (2) Paro baja rpm rpm 0
Si la velocidad de motor cae bajo este limite, generará una alarma “GENSET LOW SPEED”y el motor parará.
34 (2) Aviso baja rpm rpm 0
Si la velocidad de motor cae bajo este limite, generará una advertncia “GENSET LOW SPEED”.
35 (2) “Aviso alta rpm rpm 0
SI la velocidad de motor excede este limite, generará una advertencia “GENSET HIGH SPEED”.
36 (2) Paro por Alta rpm rpm 0
Si la velocidad de motor excede este límite, generará una alarma GENSET HIGH SPEED y el motor parará.
37 (2) Fan Alta Temperatura °C 90
Si la temperatura de refrigerante excede este límite la función de relevador de ventilador se activará.
38 (2) Fan baja temperatura °C 80
Si la temperatura de refrigerante cae bajo este limite la función de relevador de ventilador se apagará.
39 No tiene °C 100
Si la temperatura de aceite medida desde la entrada analoga excede este limite, generará una advertencia “HIGH OILTEMPERATURE SENDER”.
40 No tiene °C 120
Si la temperatura de aceite medida desde la entrada análoga excede este limite, generará una alarma“HIGH OIL TEMPERATURE SENDER” y el motor parará.
41
No tiene - 1
Este parámetro selecciona el tipo de enviador de temperatura de aceite: 0: Las caracteristicas del enviador se definen en la tabla “Sender Characteristics”. 1: VDO 2: Tipo DATCON DAH 3: Tipo DATCON DAL

Manual de Usuario DKG-309-CAN-MPU V-24 (25.08.2010)(21.02.2012)
- 46 -
Grupo de programa: Parámetros de motor (continúa)
Definición de Parámetro, (Nivel de contraseña)
Unid. Ajuste fabrica
Descripción
42
(2) “2nd
Paro Baja
Frecuencia Hz 40
Cuando los límites secundarios v/f están activos: Si la frecuencia de planta cae bajo este limite,generará una alarma GENSET LOW SPEED y el motor parará.
43
(1) “2nd
Aviso Baja
Frecuencia Hz 45
Cuando los límites secundarios v/f están activos:
Si la frecuencia de planta cae bajo este limite, generará una advertencia “GENSET LOW SPEED”.
44
(1) “2nd
Aviso Alta Frecuencia
Hz 65
Cuando los límites secundarios v/f están activos:
Si la frecuencia de planta excede este limite, generará una advertencua “GENSET HIGH SPEED”.
45
(2) “2nd
Paro Alta
Frecuencia Hz 69
Cuando los límites secundarios v/f están activos: Si la frecuencia de planta excede este limite, generará una alarma “GENSET HIGH SPEED”y el motor parará
46 (2) “2
nd Paro Baja rpm rpm 0
Cuando los límites secundarios v/f están activos:
Si la velocidad de motor cae bajo este limite, generará una alarma “GENSET LOW SPEED”y el motor parará
47 (2) “2
nd Aviso Baja rpm rpm 0
Cuando los límites secundarios v/f están activos:
Si la velocidad de motor cae bajo este limite, generará una advertencia “GENSET LOW SPEED”.
48
(2) “2nd
Aviso Alta rpm rpm 0 Si la velocidad de motor excede este limite, generará una advertencia “GENSET HIGH SPEED”.
49 (2) “2
nd Paro Alra rpm rpm 0
Cuando los límites secundarios v/f están activos:
Si la velocidad de motor excede este limite, generará una alarma “GENSET HIGH SPEED”y el motor parará
50
(2) “J1939 Habilitado - 0
0: El puerto J1939 está inoperante. 1: Las mediciones analogas (aceite, temp, rpm) se captan desde la ECU. Si la comunicación con la ECU se pierde, el motor será detenido.
51
(2) “J1939 Tipo de Motor - 0
00: TIPO DE MOTOR GENERICO 16: CUMMINS CM850 32: DETROIT DIESEL 48: DEUTZ EMR3 64: JOHN DEERE 80: PERKINS 96: VOLVO (con unidad CIU) 97: VOLVO (sin unidad CIU) 112: CATERPILLAR ADEM II/III 128: SCANIA S6 144: IVECO Otros valores: Reservados. No usar.
52
(2) “J1939 Ajuste rpm % 50 Etse parámetro ajusta la velocidad de un motor controlado por ECU en un rango de +/- 8%.
53
(2) Selector rpm p/Volvo - -
Este parámetro de programa no está guardado, pero sólo se usa para activar la selección de operación primaria ó secundaria de velocidad de una unidad de control de motor Volvo EMS-II. 0: Inicia la selección de operación primaria de veloc. 1: Inicia la selección de operación secundaria de veloc

Manual de Usuario DKG-309-CAN-MPU V-24 (25.08.2010)(21.02.2012)
- 47 -
Grupo de programa: Ajuste de Fecha y Hora (contraseña nivel-2)
Definición de Parámetro Unidad Ajuste fabr.
Descripción
Fecha - 01-31 Día del mes.
Mes - 01-12 Mes actual.
Año - 00-99 Ultimos dos dígitos del año actual.
Hora - 00-23 Hora del día.
Minuto - 00-59 Minuto actual.
Segundo - 00-59 Segundo actual.
Grupo de programa: Tabla Operación Semanal (contraseña nivel-2)
Definición de Parámetro Unidad Ajuste fabr.
Descripción
Encendido Lunes - 24:00
Revise el capítulo 9 para descripción detallada de la tabla de operación semanal.
Apagado Lunes - 24:00
Encnendido Martes - 24:00
Apagado Martes - 24:00
Encendido Miércoles - 24:00
Apagado Miércoles - 24:00
Encendido Jueves - 24:00
Apagado Jueves - 24:00
Encendido Viernes - 24:00
Apagado Viernes - 24:00
Encendido Sábado - 24:00
Apagado Sábado - 24:00
Encendido Domingo - 24:00
Apagado Domingo - 24:00

Manual de Usuario DKG-309-CAN-MPU V-24 (25.08.2010)(21.02.2012)
- 48 -
Grupo de programa:Características de enviador(contraseña nivel-2)
Definición de Parámetro Unidad Ajuste fabr.
Descripción
Resist.1 Enviador de Presión ohm 10 Punto 1 Enviador Presión Aceite, valor en ohms
Valor 1 Presión de aceite bar 0.0 Punto 1 Enviador Presión Aceite, valor en bares
Resist.2 Enviador de Presión ohm 52 Punto 2 Enviador Presión Aceite, valor en ohms
Valor 2 Presión de aceite bar 2.0 Punto 2 Enviador Presión Aceite, valor en bares
Resist.3 Enviador de Presión ohm 90 Punto 3 Enviador Presión Aceite, valor en ohms
Valor 3 Presión de aceite bar 4.0 Punto 3 Enviador Presión Aceite, valor en bares
Resist.4 Enviador de Presión ohm 140 Punto 4 Enviador Presión Aceite, valor en ohms
Valor 4 Presión de aceite bar 7.0 Punto 4 Enviador Presión Aceite, valor en bares
Resist.5 Enviador de Presión ohm 156 Punto 5 Enviador Presión Aceite, valor en ohms
Valor 5 Presión de aceite bar 8.0 Punto 5 Enviador Presión Aceite, valor en bares
Resist.6 Enviador de Presión ohm 184 Punto 6 Enviador Presión Aceite, valor en ohms
Valor 6 Presión de aceite bar 10.0 Punto 6 Enviador Presión Aceite, valor en bares
Grupo de programa:Características de enviador(contraseña nivel-2)
Definición de Parámetro Unidad Ajuste fabr.
Descripción
Resist.1Enviador Temperatura ohm 38 Punto 1 Enviador Temperatura, valor en ohms
Valor 1 de Temperatura °C 100 Punto 1 Enviador Temperatura, valor en°C
Resist.2Enviador Temperatura ohm 51 Punto 2 Enviador Temperatura, valor en ohms
Valor 2 de Temperatura °C 90 Punto 2 Enviador Temperatura, valor en °C
Resist.3Enviador Temperatura ohm 134 Punto 3 Enviador Temperatura, valor en ohms
Valor 3 de Temperatura °C 60 Punto 3 Enviador Temperatura, valor en °C
Resist.4Enviador Temperatura ohm 322 Punto 4 Enviador Temperatura, valor en ohms
Valor 4 de Temperatura °C 39 Punto 4 Enviador Temperatura, valor en°C
Resist.5Enviador Temperatura ohm 650 Punto 5 Enviador Temperatura, valor en ohms
Valor 5 de Temperatura °C 20 Punto 5 Enviador Temperatura, valor en °C
Resist.6Enviador Temperatura ohm 1630 Punto 6 Enviador Temperatura, valor en ohms
Valor 6 de Temperatura °C 02 Punto 6 Enviador Temperatura, valor en °C
Grupo de programa:Características de enviador(contraseña nivel-2)
Definición de Parámetro Unidad Ajuste fabr.
Descripción
Resist.1Enviador Temp.Acei ohm 38 Punto 1 Enviador Temperatura, valor en ohms
Valor 1 de Temperatura °C 100 Punto 1 Enviador Temperatura, valor en°C
Resist.2Enviador Temp.Acei ohm 51 Punto 2 Enviador Temperatura, valor en ohms
Valor 2 de Temperatura °C 90 Punto 2 Enviador Temperatura, valor en °C
Resist.3Enviador Temp.Acei ohm 134 Punto 3 Enviador Temperatura, valor en ohms
Valor 3 de Temperatura °C 60 Punto 3 Enviador Temperatura, valor en °C
Resist.4Enviador Temp.Acei ohm 322 Punto 4 Enviador Temperatura, valor en ohms
Valor 4 de Temperatura °C 39 Punto 4 Enviador Temperatura, valor en°C
Resist.5Enviador Temp.Acei ohm 650 Punto 5 Enviador Temperatura, valor en ohms
Valor 5 de Temperatura °C 20 Punto 5 Enviador Temperatura, valor en °C
Resist.6Enviador Temp.Acei ohm 1630 Punto 6 Enviador Temperatura, valor en ohms
Valor 6 de Temperatura °C 02 Punto 6 Enviador Temperatura, valor en °C

Manual de Usuario DKG-309-CAN-MPU V-24 (25.08.2010)(21.02.2012)
- 49 -
Grupo de programa: Configuración de entrada (Int.Baja Presión) (contraseña nivel-2)
Definición de Parámetro Aj.fabr. Descripción
Acción 0
0: Paro (el motor para inmediatamente) 1: Bote de Carga (el motor para tras enfriarse) 2: Advertencia (el relev. de sirena opera) 3: Sin operación
Muestreo 1
0: Siempre 1: Después del tiempo de retraso 2: Con línea presente
Enclave 1 0: Sin enclavar 1: Enclavado
Tipo de Contacto 0 0: Normalmente abierto 1: Normalmente cerrado
Conexión a 0 0: Negativo de batería 1: Positivo de batería
Retraso en respuesta 0 0: Sin retraso 1: Retraso (4seg.)
Grupo de programa: Configuración de entrada (Int. Alta Temperatura) (contraseña nivel-2)
Definición de Parámetro Aj.fabr. Descripción
Acción 0
0: Paro (el motor para inmediatamente) 1: Bote de Carga (el motor para tras enfriarse) 2: Advertencia (el relev. de sirena opera) 3: Sin operación
Muestreo 1 0: Siempre 1: Después del tiempo de retraso 2: Con línea presente
Enclave 1 0: Sin enclavar 1: Enclavado
Tipo de Contacto 0 0: Normalmente abierto 1: Normalmente cerrado
Conexión a 0 0: Negativo de batería 1: Positivo de batería
Retraso en respuesta 0 0: Sin retraso 1: Retraso (4seg.)

Manual de Usuario DKG-309-CAN-MPU V-24 (25.08.2010)(21.02.2012)
- 50 -
Grupo de programa: Configuración de entrada (Int. Nivel de Refrigerante) (contraseña nivel-2)
Definición de Parámetro Aj.fabr. Descripción
Acción 0
0: Paro (el motor para inmediatamente) 1: Bote de Carga (el motor para tras enfriarse) 2: Advertencia (el relev. de sirena opera) 3: Sin operación
Muestreo 1
0: Siempre 1: Después del tiempo de retraso 2: Con línea presente
Enclave 1 0: Sin enclavar 1: Enclavado
Tipo de Contacto 0 0: Normalmente abierto 1: Normalmente cerrado
Conexión a 0 0: Negativo de batería 1: Positivo de batería
Retraso en respuesta 0 0: Sin retraso 1: Retraso (4seg.)
Grupo de programa: Configuración de entrada (Falla de Cargador) (contraseña nivel-2)
Definición de Parámetro Aj.fabr. Descripción
Acción 0
0: Paro (el motor para inmediatamente) 1: Bote de Carga (el motor para tras enfriarse) 2: Advertencia (el relev. de sirena opera) 3: Sin operación
Muestreo 1
0: Siempre 1: Después del tiempo de retraso 2: Con línea presente
Enclave 1 0: Sin enclavar 1: Enclavado
Tipo de Contacto 0 0: Normalmente abierto 1: Normalmente cerrado
Conexión a 0 0: Negativo de batería 1: Positivo de batería
Retraso en respuesta 0 0: Sin retraso 1: Retraso (4seg.)

Manual de Usuario DKG-309-CAN-MPU V-24 (25.08.2010)(21.02.2012)
- 51 -
Grupo de programa: Configuración de entrada (Paro de Emergencia) (contraseña nivel-2)
Definición de Parámetro Aj.fabr. Descripción
Acción 0
0: Paro (el motor para inmediatamente) 1: Bote de Carga (el motor para tras enfriarse) 2: Advertencia (el relev. de sirena opera) 3: Sin operación
Muestreo 1
0: Siempre 1: Después del tiempo de retraso 2: Con línea presente
Enclave 1 0: Sin enclavar 1: Enclavado
Tipo de Contacto 0 0: Normalmente abierto 1: Normalmente cerrado
Conexión a 0 0: Negativo de batería 1: Positivo de batería
Retraso en respuesta 0 0: Sin retraso 1: Retraso (4seg.)
Grupo de programa: Configuración de entrada (Entrada aux.1) (contraseña nivel-2)
Definición de Parámetro Aj.fabr. Descripción
Acción 0
0: Paro (el motor para inmediatamente) 1: Bote de Carga (el motor para tras enfriarse) 2: Advertencia (el relev. de sirena opera) 3: Sin operación
Muestreo 1
0: Siempre 1: Después del tiempo de retraso 2: Con línea presente
Enclave 1 0: Sin enclavar 1: Enclavado
Tipo de Contacto 0 0: Normalmente abierto 1: Normalmente cerrado
Conexión a 0 0: Negativo de batería 1: Positivo de batería
Retraso en respuesta 0 0: Sin retraso 1: Retraso (4seg.)
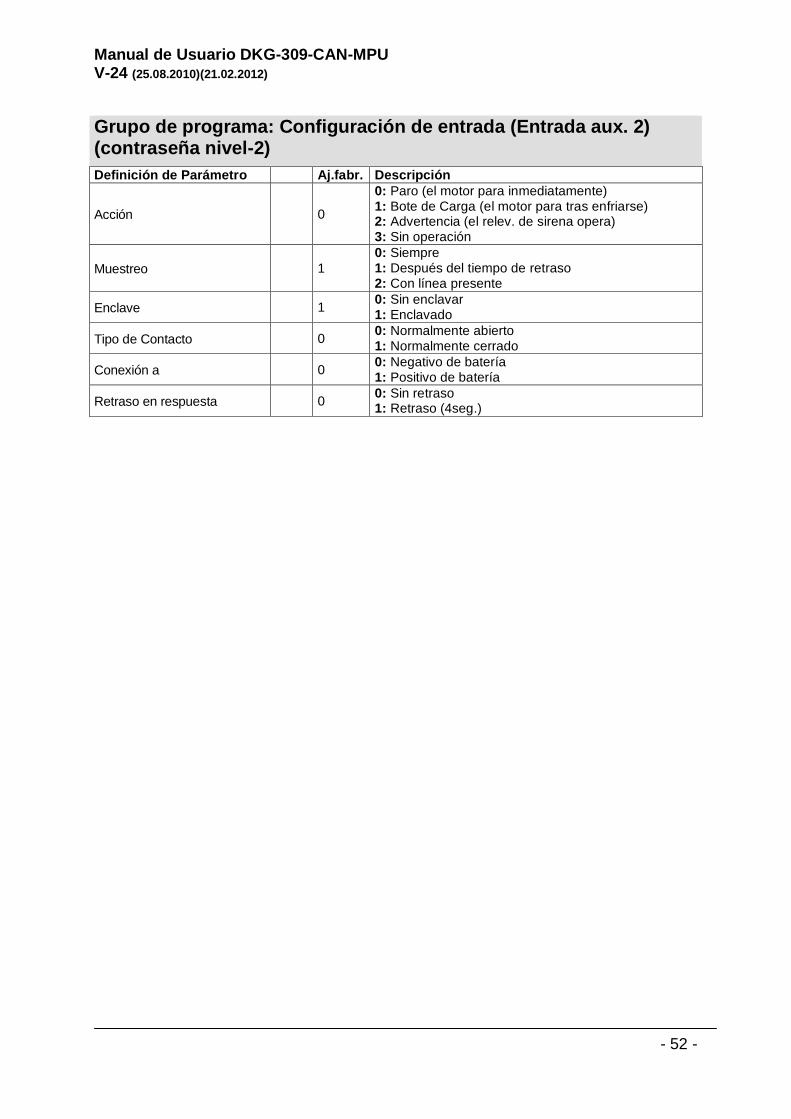
Manual de Usuario DKG-309-CAN-MPU V-24 (25.08.2010)(21.02.2012)
- 52 -
Grupo de programa: Configuración de entrada (Entrada aux. 2) (contraseña nivel-2)
Definición de Parámetro Aj.fabr. Descripción
Acción 0
0: Paro (el motor para inmediatamente) 1: Bote de Carga (el motor para tras enfriarse) 2: Advertencia (el relev. de sirena opera) 3: Sin operación
Muestreo 1
0: Siempre 1: Después del tiempo de retraso 2: Con línea presente
Enclave 1 0: Sin enclavar 1: Enclavado
Tipo de Contacto 0 0: Normalmente abierto 1: Normalmente cerrado
Conexión a 0 0: Negativo de batería 1: Positivo de batería
Retraso en respuesta 0 0: Sin retraso 1: Retraso (4seg.)

Manual de Usuario DKG-309-CAN-MPU V-24 (25.08.2010)(21.02.2012)
- 53 -
Los siguientes parámetros definen las funciones de salida de relevador. La unidad tiene 6 salidas de relevador. Las funciones de relevador fijas son Combustible, Arranque, Transferencia a línea y transferencia a Generador. RELEV-1 y RELEV-2 tienen funciones programmables seleccionadas de una lista. Los relevadores pueden extenderse hasta 22 usando los Módulos de Extensión de relevadores.. Otros relevadores están en los Módulos de Extension.
Grupo de programa: Definiciones de relevador (contraseña nivel-2)
Definición de parámetro
Ajuste Fabrica
Descripción
Relevador 01 3 Func.RELEV-1 sel. de lista
Relevador 02 1 Func.RELEV-2 sel. de lista
Relevador 03 0 Func.RELEV-3 (módulo de expansión -1) sel. de lista
Releador 04 2 Func.RELEV-4 (módulo de expansión -1) sel. de lista
Relevador 05 4 Func.RELEV-5 (módulo de expansión -1) sel. de lista
Relevador 06 5 Func.RELEV-6 (módulo de expansión -1) sel. de lista
Relevador 07 0 Func.RELEV-7 (módulo de expansión -1) sel. de lista
Relevador 08 2 Func.RELEV-8 (módulo de expansión -1) sel. de lista
Relevador 09 4 Func.RELEV-9 (módulo de expansión -1) sel. de lista
Relevador 10 5 Func.RELEV-10 (módulo de expansión -1) sel. de lista
Relevador 11 0 Func.RELEV-11 (módulo de expansión -2) sel. de lista
Relevador 12 2 Func.RELEV-12 (módulo de expansión -2) sel. de lista
Relevador 13 4 Func.RELEV-13 (módulo de expansión -2) sel. de lista
Relevador 14 5 Func.RELEV-14 (módulo de expansión -2) sel. de lista
Relevador 15 0 Func.RELEV-15 (módulo de expansión -2) sel. de lista
Relevador 16 2 Func.RELEV-16 (módulo de expansión -2) sel. de lista
Relevador 17 4 Func.RELEV-17 (módulo de expansión -2) sel. de lista
Relevador 18 5 Func.RELEV-18 (módulo de expansión -2) sel. de lista
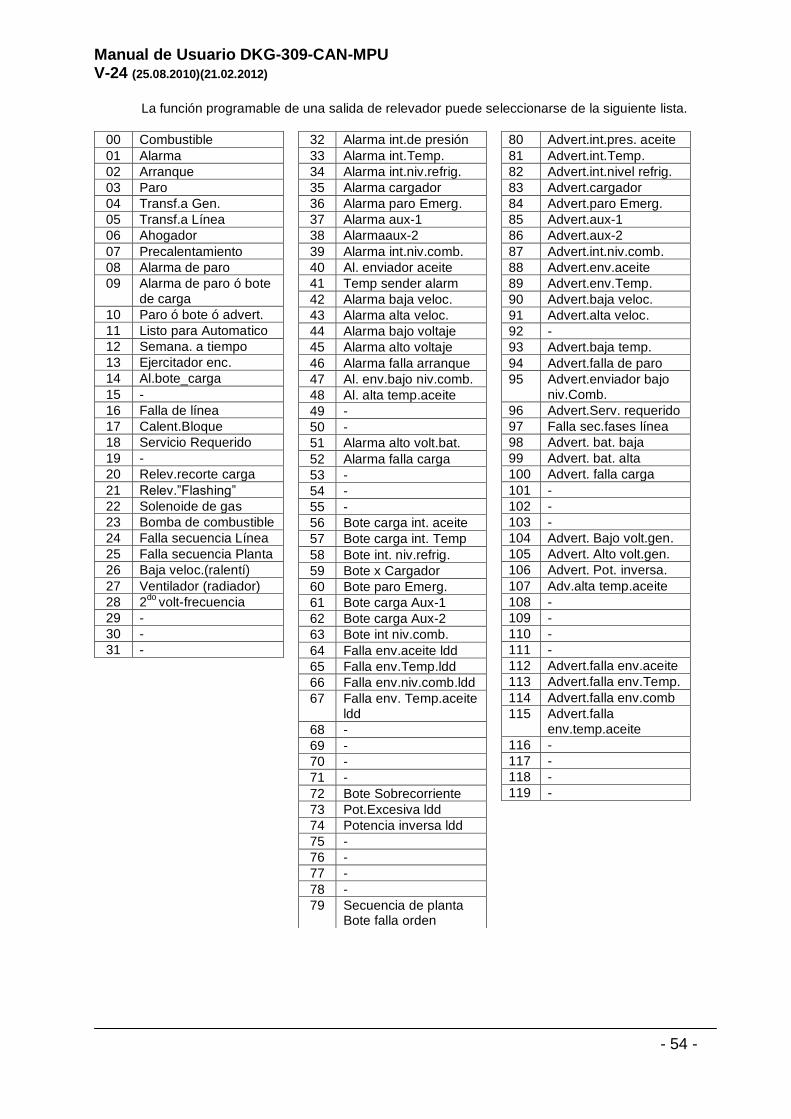
Manual de Usuario DKG-309-CAN-MPU V-24 (25.08.2010)(21.02.2012)
- 54 -
La función programable de una salida de relevador puede seleccionarse de la siguiente lista.
00 Combustible
01 Alarma
02 Arranque
03 Paro
04 Transf.a Gen.
05 Transf.a Línea
06 Ahogador
07 Precalentamiento
08 Alarma de paro
09 Alarma de paro ó bote de carga
10 Paro ó bote ó advert.
11 Listo para Automatico
12 Semana. a tiempo
13 Ejercitador enc.
14 Al.bote_carga
15 -
16 Falla de línea
17 Calent.Bloque
18 Servicio Requerido
19 -
20 Relev.recorte carga
21 Relev.”Flashing”
22 Solenoide de gas
23 Bomba de combustible
24 Falla secuencia Línea
25 Falla secuencia Planta
26 Baja veloc.(ralentí)
27 Ventilador (radiador)
28 2do
volt-frecuencia
29 -
30 -
31 -
32 Alarma int.de presión
33 Alarma int.Temp.
34 Alarma int.niv.refrig.
35 Alarma cargador
36 Alarma paro Emerg.
37 Alarma aux-1
38 Alarmaaux-2
39 Alarma int.niv.comb.
40 Al. enviador aceite
41 Temp sender alarm
42 Alarma baja veloc.
43 Alarma alta veloc.
44 Alarma bajo voltaje
45 Alarma alto voltaje
46 Alarma falla arranque
47 Al. env.bajo niv.comb.
48 Al. alta temp.aceite
49 -
50 -
51 Alarma alto volt.bat.
52 Alarma falla carga
53 -
54 -
55 -
56 Bote carga int. aceite
57 Bote carga int. Temp
58 Bote int. niv.refrig.
59 Bote x Cargador
60 Bote paro Emerg.
61 Bote carga Aux-1
62 Bote carga Aux-2
63 Bote int niv.comb.
64 Falla env.aceite ldd
65 Falla env.Temp.ldd
66 Falla env.niv.comb.ldd
67 Falla env. Temp.aceite ldd
68 -
69 -
70 -
71 -
72 Bote Sobrecorriente
73 Pot.Excesiva ldd
74 Potencia inversa ldd
75 -
76 -
77 -
78 -
79 Secuencia de planta Bote falla orden
80 Advert.int.pres. aceite
81 Advert.int.Temp.
82 Advert.int.nivel refrig.
83 Advert.cargador
84 Advert.paro Emerg.
85 Advert.aux-1
86 Advert.aux-2
87 Advert.int.niv.comb.
88 Advert.env.aceite
89 Advert.env.Temp.
90 Advert.baja veloc.
91 Advert.alta veloc.
92 -
93 Advert.baja temp.
94 Advert.falla de paro
95 Advert.enviador bajo niv.Comb.
96 Advert.Serv. requerido
97 Falla sec.fases línea
98 Advert. bat. baja
99 Advert. bat. alta
100 Advert. falla carga
101 -
102 -
103 -
104 Advert. Bajo volt.gen.
105 Advert. Alto volt.gen.
106 Advert. Pot. inversa.
107 Adv.alta temp.aceite
108 -
109 -
110 -
111 -
112 Advert.falla env.aceite
113 Advert.falla env.Temp.
114 Advert.falla env.comb
115 Advert.falla env.temp.aceite
116 -
117 -
118 -
119 -

Manual de Usuario DKG-309-CAN-MPU V-24 (25.08.2010)(21.02.2012)
- 55 -
Los siguientes parámetros definen las funciones de las entradas digitales, seleccionadas de una lista. Las Funciones de la 12 a la 23 activan también la secuencia respectiva de operación. La configuración de parametros de entrada respectiva aplica para cada entrada, así que cualquier señal puede ser programada para contactos NA ó NC, cerrando a BAT+ ó BAT-.
Grupo de programa: Selección de función de entrada (clave nivel-2)
Definición de Parámetro Ajuste Fabrica
Descripción
Selec.función entrada 01 0 Interruptor de presión de aceite
Selec.función entrada 02 1 Interruptor de alta temperatura de refrigerante
Selec.función entrada 03 2 Interruptor de bajo nivel de refrigerante
Selec.función entrada 04 3 Falla de cargador (Sólo modelos Datakom)
Selec.función entrada 05 4 Paro de Emergencia
Selec.función entrada 06 11 Entrada auxiliar-1
Selec.función entrada 07 10 Entrada auxiliar-2
Lista de selección de función de entrada
Número Descripción
0 Interruptor de presión de aceite
1 Interruptor de alta temperatura del refrigerante
2 Interruptor de bajo nivel de refrigerante
3 Falla de Cargador de Baterías (sólo modelos Datakom)
4 Paro de Emergencia
5 Alta temperatura del generador.
6 Puerta abierta
7 Interruptor de bajo nivel de combustible
8 Detector de terremotos
9 Entrada opcional-3
10 Entrada opcional-2
11 Entrada opcional-1
12 Modo Forzado AUTO
13 Modo Forzado OFF (FUERA)
14 Modo Forzado TEST (PRUEBA)
15 Modo Forzado LOAD TEST (PRUEBA CON CARGA)
16 Selección de 2do Volt-Frec.
17 Entrada Prioritaria
18 Entrada para arranque remoto
19 Deshabilitar Auto Arranque
20 Forzado a arrancar
21 Reestablecimiento de falla
22 Silenciar Alarma
23 Candado de Panel

Manual de Usuario DKG-309-CAN-MPU V-24 (25.08.2010)(21.02.2012)
- 56 -
Grupo de programa: Identificación de sitio (contraseña nivel-2)
Definición de Parámetro Ajuste de Fábrica Descripción
Renglón de identificación
de sitio
DATAKOM SITE ID
Este es el renglón de identificación de sitio enviado al comienzo de un mensaje SMS para identificar el equipo que lo envía. Cualquier renglón de 20 caracteres puede escribirse.
Grupo de programa: Número telefónico Módem-1/SMS-1 (contraseña nivel-2)
Definición de Parámetro Ajuste de Fábrica Descripción
Modem-1 / número
telefónico SMS-1 ----------------
Este parámetro acepta números de hasta 16 dígitos, incluyendo el caracter de pausa(“,”) para habilitar el marcado a través de un sistema pabx. Con Módem habilitado: Este es el primer número
telefónico usado para llamadas de módem. Con Módem deshabilitado: Este es el primer
número telefónico SMS.
Grupo de programa: Número telefónico Módem-2 / SMS-2 (contraseña nivel-2)
Definición de Parámetro Ajuste de Fábrica Descripción
Módem-2 / número
telefónico SMS-2 ----------------
Este parámetro acepta números de hasta 16 dígitos, incluyendo el caracter de pausa(“,”) para habilitar el marcado a través de un sistema pabx. Con Módem habilitado: Este es el segundo
número telefónico usado para llamadas de módem. Con Módem deshabilitado: Este es el segundo
número telefónico SMS.
Grupo de programa: Número telefónico SMS-3 (contraseña nivel-2)
Definición de Parámetro Ajuste de Fábrica Descripción
Número telefónico SMS-3 ---------------- Este número telefónico SMS acepta 16 dígitos máx.
Grupo de programa: Número telefónico SMS-4 (contraseña nivel-2)
Definición de Parámetro Ajuste de Fábrica Descripción
Número telefónico SMS-4 ---------------- Este número telefónico SMS acepta 16 digitos máx.
Grupo de programa: Número telefónico SMS-5 (contraseña nivel-2)
Definición de Parámetro Ajuste de Fábrica Descripción
Número telefónico SMS-5 ---------------- Este número telefónico SMS acepta 16 digitos máx.
Grupo de programa: Número telefónico SMS-6 (contraseña nivel-2)
Definición de Parámetro Ajuste de Fábrica Descripción
Número telefónico SMS-6 ---------------- Este número tlefónico SMS acepta 16 digitos máx.

Manual de Usuario DKG-309-CAN-MPU V-24 (25.08.2010)(21.02.2012)
- 57 -
14. LOCALIZACION DE FALLAS
La planta opera indefinidamente con presencia de línea de CA ó sigue operando aún con voltaje de línea adecuado:
-Revise el aterrizaje del motor. -Los voltajes de línea pueden estar fuera de los límites programados, mida los voltajes de las fases. -Revise las lecturas de voltaje de CA presionando el botón “MENU”. -Los límites de voltaje superior e inferior pueden estar muy cerrados. Revise los parámetros “Mains Voltage Low Limit” y “Mains Voltage High Limit”. Los valores estandard son 90/150 volts. -El voltaje de histéresis puede ser excesivo. El valor estandard es de 8 volts.
Los voltajes de línea ó la frecuencia mostrados en la unidad no son correctos:
-Revise el aterrizaje del motor, es necesario. -El margen de error de la unidad es +/- 3 volts. -Si existen mediciones falsas sólo cuando el motor funciona, puede deberse a un alternador ó su regulador de voltaje fallando. Desconecte la conexión de carga del alternador del motor y revise si el error desapareció. -Si existen mediciones falsas sólo cuando la línea está presente, es probable que lo cause el cargador de baterías. Apáguelo ó desconéctelo y revise de nuevo.
Voltajes incorrectos Fase-a-Fase no obstante que los voltajes Fase a Neutro son correctos:
-Secuencia de fases incorrecta. Conecte en el orden correcto.
Lecturas de KW y F.P. incorrectas no obstante que las lecturas de Amps son correctas:
-Los Transformadores de corriente no están connectados a las entradas correctas ó algunos TCs están conectados con polaridad inversa. Determine las conexiones correctas para cada TC con el fin de obtener lecturas correctas de KW y F.P. para la fase correspondiente, después conecte todos los TCs.
Corto circuite las salidas de los transformadores de corriente no utilizados.
Cuando la línea de CA falla la unidad energiza el solenoide de combustible, pero no arranca y se muestra la leyenda “OIL PRESSURE EXISTS !”:
La unidad no recibe el negativo de batería en la entrada de presión de aceite. -Interruptor de presión desconectado. -Cable del interruptor de presión interrumpido. -Interruptor de presión defectuoso. -El interruptor de presión de aceite tarda mucho en cerrar. Si la unidad sensa alguna presión, no arrancará. Cuando el interruptor se cierre la unidad arrancará. Opcionalmente puede reemplazar el interruptor de presión.
El motor no opera después del primer intento de arranque, la unidad no lo vuelve a intentar y se muestra la leyenda “OIL PRESSURE EXISTS !”: -El interruptor de presión de aceite tarda mucho en cerrar. Si la unidad sensa alguna presión, no arrancará. Cuando el interruptor se cierre la unidad arrancará. Opcionalmente puede reemplazar el interruptor de presión.
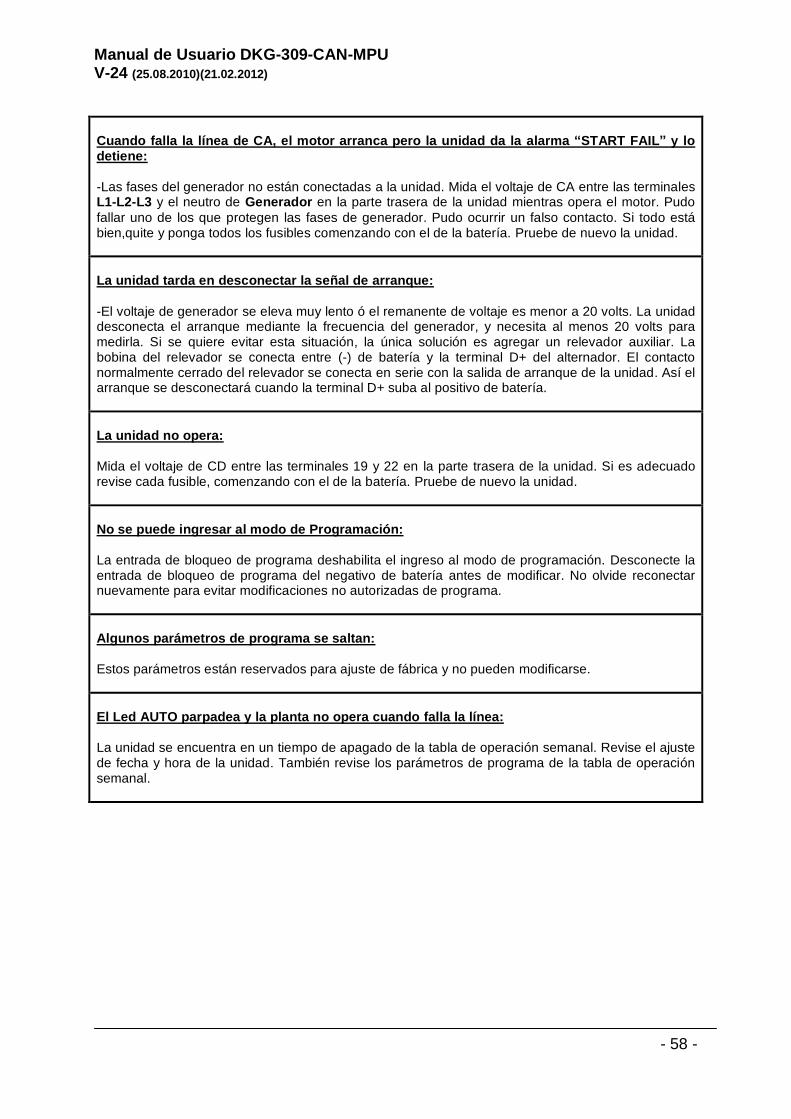
Manual de Usuario DKG-309-CAN-MPU V-24 (25.08.2010)(21.02.2012)
- 58 -
Cuando falla la línea de CA, el motor arranca pero la unidad da la alarma “START FAIL” y lo detiene:
-Las fases del generador no están conectadas a la unidad. Mida el voltaje de CA entre las terminales L1-L2-L3 y el neutro de Generador en la parte trasera de la unidad mientras opera el motor. Pudo
fallar uno de los que protegen las fases de generador. Pudo ocurrir un falso contacto. Si todo está bien,quite y ponga todos los fusibles comenzando con el de la batería. Pruebe de nuevo la unidad.
La unidad tarda en desconectar la señal de arranque:
-El voltaje de generador se eleva muy lento ó el remanente de voltaje es menor a 20 volts. La unidad desconecta el arranque mediante la frecuencia del generador, y necesita al menos 20 volts para medirla. Si se quiere evitar esta situación, la única solución es agregar un relevador auxiliar. La bobina del relevador se conecta entre (-) de batería y la terminal D+ del alternador. El contacto normalmente cerrado del relevador se conecta en serie con la salida de arranque de la unidad. Así el arranque se desconectará cuando la terminal D+ suba al positivo de batería.
La unidad no opera:
Mida el voltaje de CD entre las terminales 19 y 22 en la parte trasera de la unidad. Si es adecuado revise cada fusible, comenzando con el de la batería. Pruebe de nuevo la unidad.
No se puede ingresar al modo de Programación: La entrada de bloqueo de programa deshabilita el ingreso al modo de programación. Desconecte la entrada de bloqueo de programa del negativo de batería antes de modificar. No olvide reconectar nuevamente para evitar modificaciones no autorizadas de programa.
Algunos parámetros de programa se saltan:
Estos parámetros están reservados para ajuste de fábrica y no pueden modificarse.
El Led AUTO parpadea y la planta no opera cuando falla la línea:
La unidad se encuentra en un tiempo de apagado de la tabla de operación semanal. Revise el ajuste de fecha y hora de la unidad. También revise los parámetros de programa de la tabla de operación semanal.
Manual de Usuario DKG-309-CAN-MPU V-24 (25.08.2010)(21.02.2012)
- 59 -
15. DECLARACION DE CONFORMIDAD
La unidad cumple con las directivas EU
-2006/95/EC (bajo voltaje)
-2004/108/EC (compatibilidad electro-magnética)
Normas de referencia:
EN 61010 (requerimientos de seguridad)
EN 61326 (requerimientos EMC)
La marca CE indica que este producto cumple con los requerimientos Europeos
ambientales,de seguridad ,salud y protección al cliente.
Manual de Usuario DKG-309-CAN-MPU V-24 (25.08.2010)(21.02.2012)
- 60 -
16. ESPECIFICACIONES TECNICAS
Voltaje de Generador: 0 a 300 V-CA Fase a Neutro (0 a 520 V-CA Fase a Fase).
Frecuencia de Generador: 0-100 Hz.
Voltaje de Línea: 0 a 300 V-CA Fase a Neutro (0 a 520 V-CA Fase a Fase).
Frecuencia de Línea: 0-100 Hz.
Rango de alimentación en CD: 9.0 VCD a 30.0 VCD
Caída de tensión al arranque: soporta 0 V por 100ms.
Consumo de corriente típico en espera: 130 mACD.
Máximo consumo de corriente: 250 mACD.
Salidas para control de Transferencia Línea-Planta: 16 A @ 250 VCA.
Salidas de CD: 10A @ 28 VCD. Salidas de relevador.
Corriente de excitación del alternador de carga: min 150 mACD @ 10 - 30 VCD.
Entradas de Corriente: Desde los transformadores de corriente, .../5A. Carga Máxima 0.7VA por fase.
Entradas Digitales: Voltaje de entrada 0 - 30 VCD. Internalmente conectadas al positivo de batería vía
resistor de 4700 ohms.
Entradas Análogas: Entrada de resistor de 0 a 5000 ohms conectado al negativo de batería. Establece
10 mA cuando se cierra al negativo.
Categoría de Medición: CAT II
Categoria de Aire: Grado de contaminación II
Puerto de Comunicaciones: RS-232. 9600 baudios, sin paridad, 1 bit de parada.
Rango de temperatura de Operación: -20C a +70C
Rango de temperatura de almacenamiento: -40C a +80C
Humedad máxima: 95%, no-condensante.
Dimensiones: 190x135x48mm (LxAxF).
Dimensiones del corte del panel: 176 x 121mm mínimo.
Peso: 400 g (aprox.).
Material de la carcasa: ABS/PC (UL94-V0) alta temperatura,autoextinguible.
Factor de proteccion: IP65 desde el frente del panel, IP30 desde la parte trasera.

Manual de Usuario DKG-309-CAN-MPU V-24 (25.08.2010)(21.02.2012)
- 61 -