underwater counderwater coommunications · hoi joint program mmunications blair 2. introduction •...
TRANSCRIPT

Underwater CoUnderwater Co
Ballardbjblair@April 19
WHOIE Adviser: James Preisig
April 19, 2007 Underwater CoBallard
ommunicationsommunications
9, 2007
MIT Adviser: Art Baggeroer
ommunicationsd Blair
1

Back
BS in Electrical and CoBS in Electrical and CoCornell university 2002
MS in Electrical and CoJ h H ki 2005Johns Hopkins 2005
Hardware Engineer, JH
PhD Candidate, MIT/WApril 19, 2007 Underwater Co
Ballard
kground
omputer Engineeringomputer Engineering, 2
omputer Engineering,
HUAPL 2002-2005
WHOI Joint Programommunicationsd Blair
2
Introduction
O 0% f l• Ocean covers 70% of plan• 11,000 meters at deepest p
April 19, 2007 Underwater CoBallard
and Motivation
netpoint
ommunicationsd Blair
3

Underwate
WHOApril 19, 2007 Underwater Co
Ballard
WHO
r Technology
OI 2006ommunicationsd Blair
4
OI, 2006

Comm
S t kSensor networks
Autonomous underwate
Gliders
Manned VehiclesManned Vehicles
April 19, 2007 Underwater CoBallard
unication
er vehicles (AUV)
ommunicationsd Blair
5

Current A
ScienceScience− Geological / bathymetric su
Underwater archeology− Underwater archeology− Ocean current measuremen
Deep ocean exploration− Deep ocean explorationGovernment
Fish population manageme− Fish population manageme− Costal inspection
IndustryIndustry− Oil field discovery maintena
April 19, 2007 Underwater CoBallard
Applications
rveys
nt
ntnt
ance WHOI, 2005
ommunicationsd Blair
6
Applications plann
Ocean observation systemOcean observation system− Costal observation
MilitaryMilitary− Submarine communications
Shi i ti− Ship inspectionNetworking
M bil t k (DA− Mobile sensor networks (DAVehicle deployment
− Multiple vehicles deployed s− Resource sharing among ve
April 19, 2007 Underwater CoBallard
ned / in development
mm
s (covert)
ARPA)ARPA)
simultaneouslyehicles
ommunicationsd Blair
7

Example Comm
April 19, 2007 Underwater CoBallard
munication System
PLUSnet/Seaweb
ommunicationsd Blair
8

Technology fo
RF (~1m range)RF ( 1m range)− Absorbed by seawater
Laser (~100m range)( g )− Hard to aim/control− High attenuation except for blue/g
Ult L F ( 100 kUltra Low Frequency (~100 km− Massive antennas (miles long)− Very narrowband (~50 Hz)y ( )− Not practical outside of navy
Cable− Expensive/hard to deploy mainta− Impractical for mobile work sites
April 19, 2007 Underwater CoBallard
r communication
green)m)
in
ommunicationsd Blair
9

Acoustics is
Fairly low powerFairly low power− ~10-100W Tx − ~100 mW Rx100 mW Rx
Well studied− Cold war military funding
Compact− Small amount of hardware n
Current Best Solution
April 19, 2007 Underwater CoBallard
s the solution
WHOI Micromodem
needed
ommunicationsd Blair
10

Acoustics
A ti iAcoustic wave is compthrough water medium
April 19, 2007 Underwater CoBallard
Background
i t liression wave traveling
ommunicationsd Blair
11

Sound
S d f d 1500Speed of sound ~ 1500
Deep water profile
Schmidt, Computational Ocean Acoustics
April 19, 2007 Underwater CoBallard
d Profile
0 /0 m/s
ommunicationsd Blair
12

Global Oc
Schmidt, Comput
April 19, 2007 Underwater CoBallard
cean Profile
tational Ocean Acoustics
ommunicationsd Blair
13

Shallow w
Schmidt, Comp
April 19, 2007 Underwater CoBallard
water profile
putational Ocean Acoustics
ommunicationsd Blair
14

Speed of Sou
V ti l d d fi• Vertical sound speed profi• the characteristics of the• the amount and importan• the amount of bottom int• the location and level of
• Horizontal Speed of SoundN li i i i h• Nonlinearities in channe
April 19, 2007 Underwater CoBallard
und Implications
l i tle impactse impulse responsence of surface scatteringteraction and lossshadow zones
d impactsll response
ommunicationsd Blair
15

Propaga
Schmidt, C
April 19, 2007 Underwater CoBallard
ation Paths
Computational Ocean Acoustics
ommunicationsd Blair
16

Mul
Mi lti th d tMicro-multipath due to Macro-multipath due top
April 19, 2007 Underwater CoBallard
tipath
h frough surfaceso environment
Sea surfaceSea surface
TxRx
seabed
ommunicationsd Blair
17

Time vary
Time variation is due to:Time variation is due to:− Platform motion− Internal waves− Surface waves
Effects of time variabilityEffects of time variability− Doppler Shift
cuff cd =
− Time dilation/compression of the
Channel coherence times often
c
Channel coherence times oftenChannel quality can vary in < 1
April 19, 2007 Underwater CoBallard
ying channel
received signal
n << 1 secondn << 1 second. 1 second.
ommunicationsd Blair
18

Acoustic FocusingTime-Varying Channel Impulse Response
April 19, 2007 Underwater CoBallard
Time (seconds)
g by Surface WavesDynamics of the first surface scattered arrival
ommunicationsd Blair
19Preisig, 2006
Multipath and Time V
Ch l t ki dChannel tracking and q− Equalizer necessary an
Coding and interleavingCoding and interleaving
In networks, message r
April 19, 2007 Underwater CoBallard
Variability Implications
lit di ti i it lquality prediction is vitalnd beefy
gg
routing
ommunicationsd Blair
20
Shado
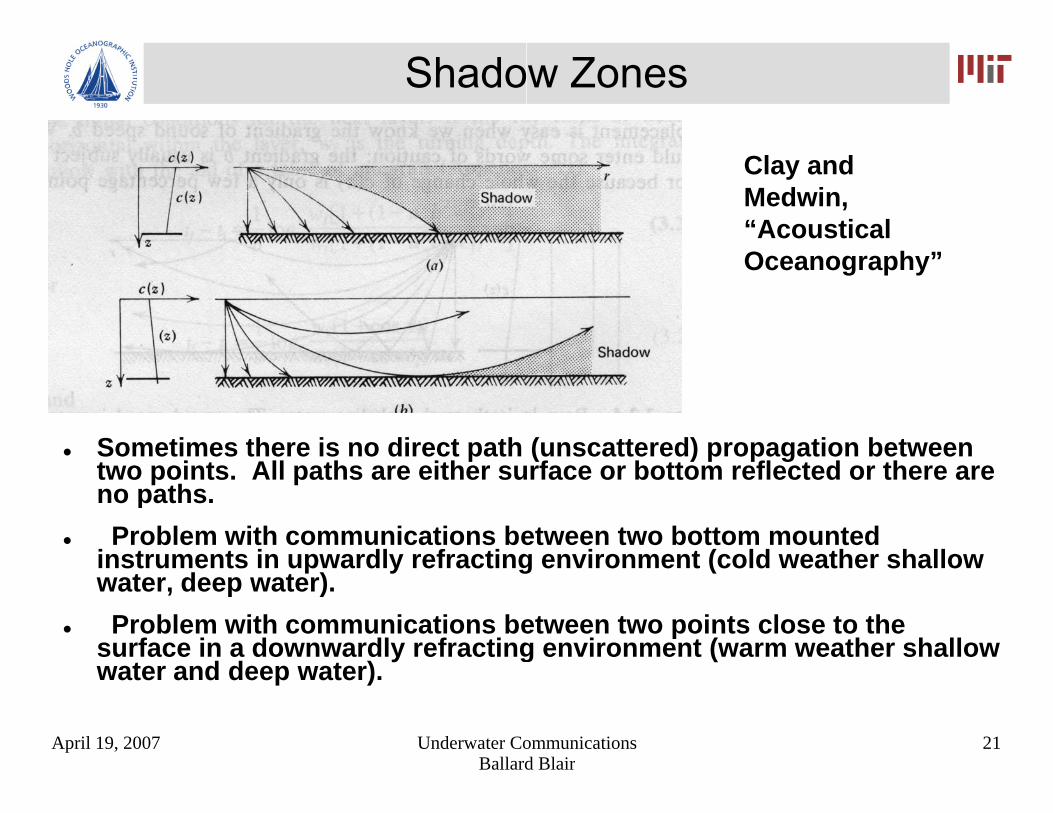
Sometimes there is no direct path two points. All paths are either suno paths.pProblem with communications be
instruments in upwardly refractingwater, deep water).Problem with communications be
surface in a downwardly refractingwater and deep water).
April 19, 2007 Underwater CoBallard
w Zones
Clay and Medwin, ,“Acoustical Oceanography”
(unscattered) propagation between urface or bottom reflected or there are
etween two bottom mounted g environment (cold weather shallow
etween two points close to the g environment (warm weather shallow
ommunicationsd Blair
21

Shadow Zone Exa
April 19, 2007 Underwater CoBallard
amples (Deep Water)
ommunicationsd Blair
22Figures from J. Preisig
Ambie
• Ambient noise• Ambient noise – Passing ships, storms, breaking wav– p.s.d. decays as 20dB/decade ->N(f)
Primary natural sources− bubbles, rain, and biologic sources such
BubblesCan cause communications channel to di− Can cause communications channel to di
− Can increase surface scattering losses (u
− Attenuation in bubble cloud can be 20dB/
F d d t tt ti ( k 3− Freq dependent attenuation (peak near 3
− Can persist for minutes
− Cause sound (noise)
April 19, 2007 Underwater CoBallard
ent Noise
ves, seismic events )= 1010 f-2 Watts/Hz re 1μPa
as snapping shrimp
isappearisappear
up to 10dB per bounce)
/meter
30kH )30kHz)
ommunicationsd Blair
23
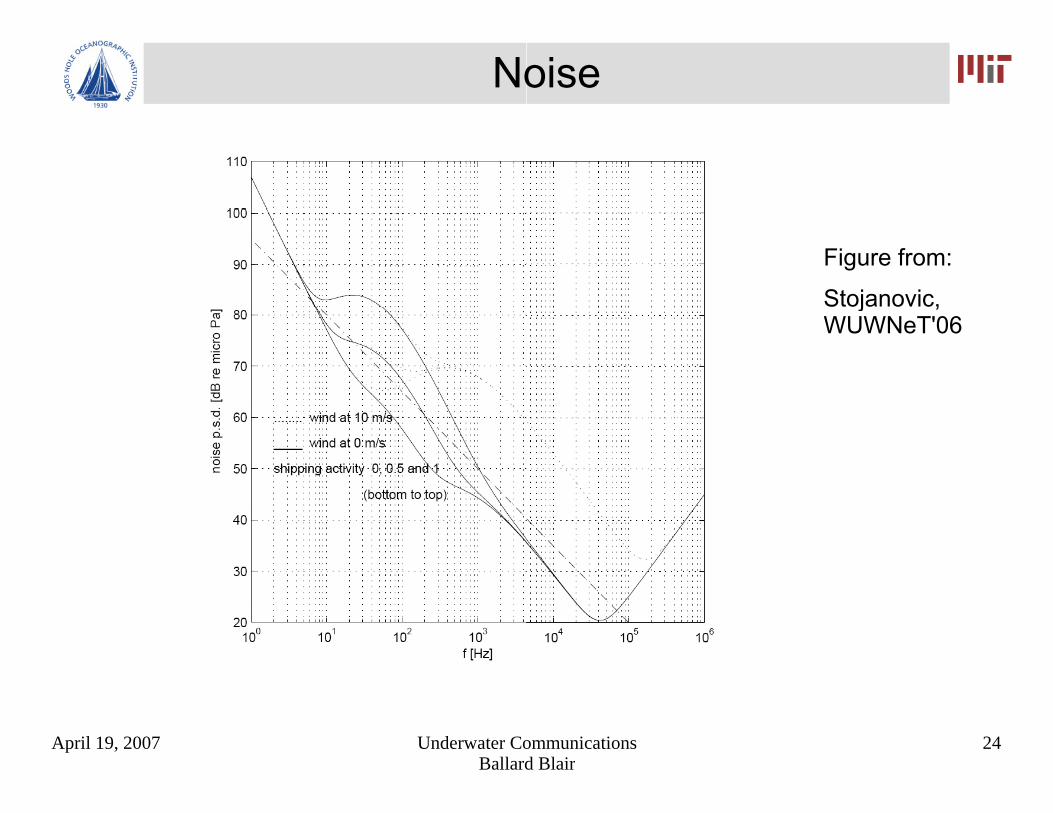
No
April 19, 2007 Underwater CoBallard
oise
Figure from:
Stojanovic, j ,WUWNeT'06
ommunicationsd Blair
24

Bubble Clou
April 19, 2007 Underwater CoBallard
ud Attenuation
ommunicationsd Blair
25Figures from J. Preisig

Band
C t f t iCenter frequency typica
Typical Bandwidth ~ 5-
Channel is inherently by− Modulation essential for
April 19, 2007 Underwater CoBallard
dwidth
ll d 10 30kHally around 10-30kHz
15kHz
band-limitedr high rate communications
ommunicationsd Blair
26

Path loss an
P th LPath Loss− Spherical Spreading ~ r− Cylindrical Spreading ~
Absorption ~ α(f)-r
Thorp’s formula (for sea− Thorp s formula (for sea
410044
111.0)(log10 2
2
2
2
++
+=
ff
fffα
41001 ++ ff
April 19, 2007 Underwater CoBallard
nd Absorption
r -1
r -0.5
a water):a water):
(dB/km) 003.0 000275.0 22 ++ f
ommunicationsd Blair
27
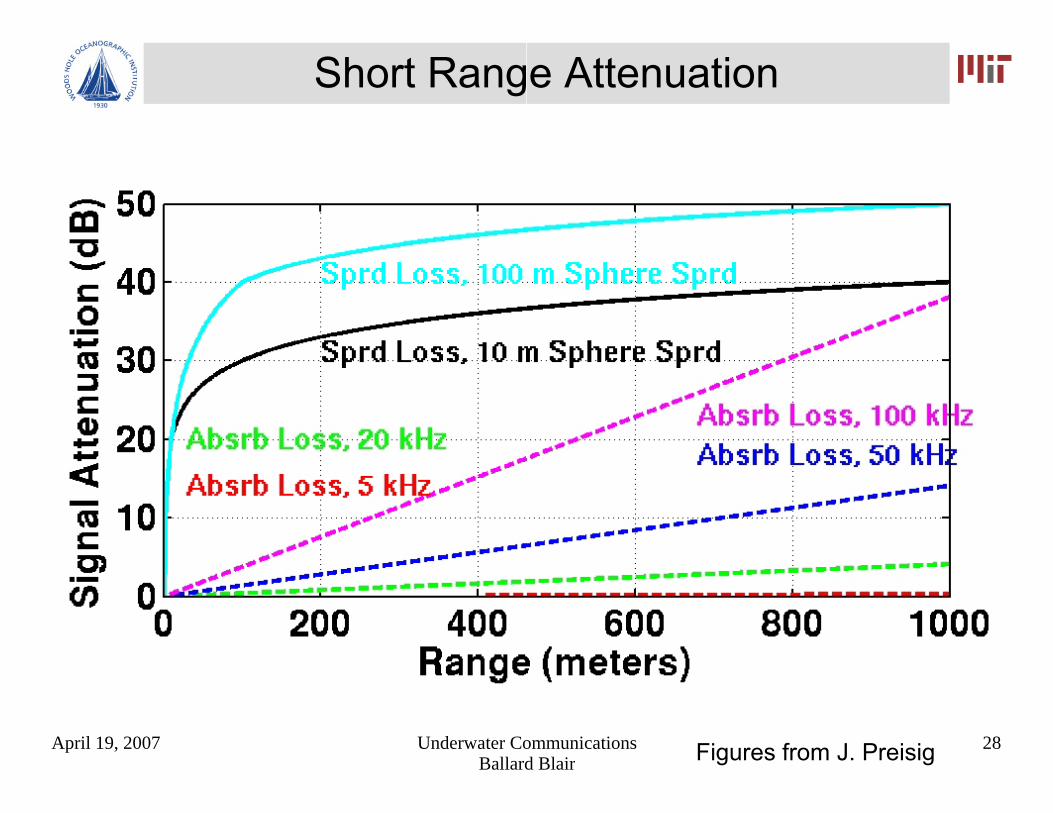
Short Rang
April 19, 2007 Underwater CoBallard
e Attenuation
ommunicationsd Blair
28Figures from J. Preisig

Long Rang
SNR( f ) =171+10log(P) − r α( f ) − 20log(h /2
60
70
80
90
1 km
30
40
50
SN
R (d
B) 10 km
50 km
-10
0
10
2050 km
100 km
0 5 10 15 20 25-20
f (kHz)
Figure courtesy of Costas
April 19, 2007 Underwater CoBallard
Figure courtesy of Costas
ge Bandwidth
⎛ ⎞2) −10log(r − h /2) −10log N( f )df
f −df / 2
f +df / 2
∫⎛
⎝ ⎜ ⎜
⎞
⎠ ⎟ ⎟ dB
Source: 20 Watts
h 500h = 500 m
30 35 40
s Pelekanakis
ommunicationsd Blair
29
s Pelekanakis

Attenuation of S
Schmidt CApril 19, 2007 Underwater Co
Ballard
Schmidt, C
Sound in Seawater
Computational Ocean Acousticsommunicationsd Blair
30
Computational Ocean Acoustics
Bandwidth
M d l ti fModulation frequency m
System inherently wide
Frequency curtain effecq y− Form of covert commun
Might help with network− Might help with network
April 19, 2007 Underwater CoBallard
Implications
t b k t lmust be kept low
e-band
ctnicationsk routingk routing
ommunicationsd Blair
31

Latency
P ti f dPropagation of sound s− Feedback might take se− Channel changing faste
Most underwater nodesC i ti T− Communications Tx pow
− Retransmissions costly
April 19, 2007 Underwater CoBallard
and Power
l th li htslower than lighteveral seconder than feedback
s battery powered( 10 100W)wer (~10-100W)
ommunicationsd Blair
32

Example
Power A
WHOI Micromodem
DSP Tex10
Transmit Power
10 Typ
Receive 80 Power Wh
Data Rate 805 pFS
Daughter Card / Co-processor
April 19, 2007 Underwater CoBallard
FS
e Hardware
Amp
Micromodem in action
Micromodem Specifications xas Instruments TMS320C5416 0MHz low-power fixed point processor
Watts pical match to single omni-directional ceramic transducer.
milliwatts hile detecting or decoding an low rate FSK packet.
-5400 bps packet types supported. Data rates higher than 80bps SK i dditi l d t b i d
ommunicationsd Blair
33
SK require additional co-processor card to be received.

Conc
C i ti i thCommunicating in the oce− Time varying channel− Inconsistent noise− Shadow zones− Bubbles− Latency
Many questions still left to − Communications is not well− Many opportunities for adva
April 19, 2007 Underwater CoBallard
clusions
i diffi ltan is difficult
be answered researched
ancesommunicationsd Blair
34

Acknowle
I ld lik t th k thI would like to thank thehelping me with this pre
− Jim Preisig− Costas Pelekanakis− Henrik Schmidt− Milica StojanovicMilica Stojanovic− WHOI Acoustic team
April 19, 2007 Underwater CoBallard
edgements
f ll i l fe following people for esentation:
ommunicationsd Blair
35
My Re
C di f th dCoding for the underwa
April 19, 2007 Underwater CoBallard
esearch
t h later channel
ommunicationsd Blair
36