tv/dtv technologies_e… · · 2017-03-212 glossary of abbreviations 7 list of figures 10 list of...
TRANSCRIPT

KAUNAS UNIVERSITY OF TECHNOLOGY
Vytautas Deksnys
DIGITAL TV TECHNOLOGIES
Education Course
KAUNAS, 2014

2
GLOSSARY of ABBREVIATIONS 7
LIST of FIGURES 10
LIST of TABLES 15
INTRODUCTION 16
1. TELEVISION HISTORY 18
1.1. Main Television Principle 18
1.2. Development of Monochrome Television 18
1.3. Development of Color Television 22
1.4. NTSC 24
1.5. SECAM 25
1.6. PAL 25
1.7. MAC (multiplexed analog components) 26
1.8. PALplus 26
1.9. Development of Digital Television 26
HUMAN EYE STRUCTURE, COLOR VISION and COLOR MODELS 29
2.1. Parts of the Human Eye 29
2.2. Color Vision 30
2.3. Development of Color Models 34
2.4. RGB Color Model 36
2.5. CMYK Color Model 37
2.6. Gamma Correction 38
2.7. YUV Color Model 38
2.8. YCbCr Color Model 39
2.9. YCoCg Color Model 39
HUMAN HEARING, PERCEPTION and SPEECH PRODUCTION 41
3.1 Human Ear Structure 41
3.2 Limits of Hearing 42
3.3 Masking 45
3.3.1 Time Masking 45
3.3.2 Frequency Masking 45
3.4 Ear as spectrum analyzer 46
3.5. Human Voice 49
3.6 Vowels and Consonants 50
3.7 Engineering Model 51
4. DIGITIZATION of SIGNALS 54
4.1 Pulse Code Modulation 54

3
4.2 Sampling: Nyquist- Shennon Sampling Theorem 54
4.3 Ideal Sampling 55
4.4 Aliasing and Anti-Aliasing 56
4.5 Flat-Top Sampling 58
4.6 Quantizing: Uniform Quantizing 60
4.7 Encoding 61
4.8 Bandwidth of PCM Signals 63
4.9 Linear PCM Advantages and Disadvantages 64
4.10 Digitization of Video Signals 66
4.10.1 Introduction 66
4.10.2 Digitization formats 67
4.10.3 Transport problems 69
5. SPEECH, AUDIO and VIDEO SIGNALS COMPRESSION by QUANTIZATION 70
5.1 Necessity and possibility of compression 70
5.2 Nonuniform quantizing: µ-law and A-law companding 70
5.3 Adaptive Quantization 74
5.3.1 Maximum SNR coding 74
5.3.2 Adaptation principle 74
5.3.3 Types of adaptation 75
5.3.4 Feed-forward adaptation 75
5.3.5 Feed-backward adaptation 82
5.4 Differential quantization 83
5.5 Vector quantization 85
6. VIDEO SIGNALS COMPRESSION 88
6.1 Video Material Characteristics 88
6.1.1 Picture correlation 88
6.1.2 Information quantity in a digital image 89
6.2 Variable Length Coding (VLC) or Entropy Coding 90
6.3 Predictive Coding 93
6.4 Prediction with Motion Compensation 95
6.5 Compression of Images Using Transformations 99
7. LINEAR PREDICTIVE ANALYSIS of SPEECH SIGNALS 107
7.1 Basic Principles of Linear Predictive Analysis 107
7.2 Optimal prediction coefficients 109
7.3 The autocorrelation method 109
7.3.1 The Durbin‘s recursive procedure 110
7.3.2 Prediction effectiveness 112

4
7.4 The covariance method 112
7.5 The choice of parameters for linear predictive analysis 113
8. AUDIO SIGNALS COMPRESSION 116
8.1 Sub-Band Coding Principle 116
8.2 MPEG Audio Layers 117
8.2.1 MPEG-1 Audio Layer 1 118
8.2.2 MPEG-1 Audio Layer 2 120
8.2.3 MPEG-1 Audio Layer 3 121
8.3 MPEG-2 Audio 126
8.3 MPEG-2 Advanced Audio Coding 127
8.5 Main Characteristics of MPEG-4 Audio 129
9. FORMATION of DVB DIGITAL STREAMS 130
9.1 Characteristics of ISO/IEC 13818 standard 130
9.2 MPEG-2 video compression standard 131
9.3 Construction of MPEG bit streams 131
9.3.1 MPEG-2 elementary stream 132
9.3.2 MPEG-2 packetized elementary stream 133
9.3.3 MPEG-2 program stream 134
9.3.4 MPEG-2 transport stream 134
9.3.5 The MPEG-2 tables 137
10. SCRAMBLING and CONDITIONAL ACCESS 140
10.1 Introduction 140
10.2 Functional Partitions 140
10.2.1 Data-Scrambling 141
10.2.2 Subscriber Authorization System 141
10.2.3 Subscriber Management System 141
10.3 System Architecture 141
10.3.1 Scrambler and Descrambler 141
10.3.2 CA Messages 142
10.3.3 CA Descriptor 143
10.3.4 CA-Host 143
10.3.5 CA-Client 143
10.3.6 CA-Module 144
10.3.7 Subscriber Management System 144
10.4 Network Integration 144
10.7 Main Conditional Access Systems 145
11. RANDOMIZATION and FRAME SYNCHRONIZATION 146

5
11.1 Randomization 146
11.2 Frame Synchronization 148
12. CODING 150
12.1 Introduction 150
12.2 Block Codes 150
12.3 Burst Error Correction 151
12.3.1 Block Interleaving 151
12.3.2 Convolutional Interleaving 152
12.3.3 Reed–Solomon (RS) Code 154
12.4 Convolutional Coding 155
12.4.1 Code parameters and the structure of encoder 155
12.4.2 Encoder states 156
12.4.3 Punctured codes 156
12.4.4 Structure of an encoder for L>1 157
12.4.5 Coding of an incoming sequence 157
12.4.6 Encoder design 158
12.4.7 State diagram 159
12.4.8 Tree diagram 160
12.4.9 Trellis diagram 161
12.4.10 The basic decoding idea 161
12.4.11 Sequential decoding 162
12.4.12 Maximum likelihood and Viterbi decoding 165
13. MODULATION of DIGITAL SIGNALS 169
13.1 Phasor Representation of Signals 169
13.1.1 Geometric interpretation 170
13.2 Modulation 172
13.3 Multilevel Modulation and Constellation Diagrams 173
13.4 Quadrature Modulators and Demodulators 176
13.5 Inter-Symbol Interference 177
13.6 Coded Orthogonal Frequency Division Multiplexing 178
13.6.1 Introduction 178
13.6.2 Effects of multipath propagation 179
Multiple carriers 179
13.6.4 Orthogonality 181
13.6.5 Guard interval 182
13.6.6 Generation and demodulation of COFDM signal 183
13.6.7 Coding 184

6
13.6.8 Inserting pilot cells 185
13.6.9 Interleaving 185
13.6.10 Choice of COFDM parameters 185
14. CHARACTERISTICS of DVB STANDARDS 187
14.1 DVB-T system 187
14.1.1 Splitter 188
14.1.2 Transport stream adaptation and randomization 188
14.1.3 Outer coding 189
14.1.4 Outer interleaving 190
14.1.5 Inner coding 191
14.1.6 Inner interleaving 192
14.1.7 Bit-wise interleaving 193
14.1.8 Symbol interleaving 194
14.1.9 Signal constellations and mapping 194
14.1.10 OFDM frame structure 196
14.1.11 Main parameters of DVB-T system 197
14.2 DVB-C system 198
14.2.1 Functional block diagram of the system 198
14.2.2 System blocks and their functions 198
14.3 DVB-S system 201
14.3.1 Functional block diagram of the system 201
14.3.2 System blocks and their functions 202
REFERENCES 204

7
GLOSSARY of ABBREVIATIONS AAC – Advanced Audio Coding
AC – Alternating Current
ACE – Advanced Coding Efficiency
ACI – Adjacent Channel Interference
ACK – Acknowledgment
ACM – Adaptive Coding and Modulation
ADC – Analog-to-Digital Converter
ADSL – Asymmetric Digital Subscriber Line
AES – Advanced Encryption Standard
APSK – Amplitude or Asymmetric Phase-Shift Keying
ARQ – Automatic Repeat Request
ASK – Amplitude-Shift Keying
ASPEC – Audio Spectral Perceptual Entropy Coding
ATA/ATAPI – Advanced Technology Attachment with Packet Interface
ATM – Asynchronous Transfer Mode
AVC – Advanced Video Coding
BER – Bit Error Rate
BC – Backward Compatibility
BCH – Bose-Chaudhuri-Hocquenghem Code
BPSK – Binary Phase-Shift Keying
BSAC – Bit-Sliced Arithmetic Coding
BSP – Board Support Package
CAT – Conditional Access Table
CABAC – Context Adaptive Binary Arithmetic Coding
CAVLC – Context Adaptive Variable Length Coding
CCI – Co-Channel Interference
CD – Compact Disc
CELP – Code-Excited Linear Predictive
CEPS – Common Electronic Purse Specification
CIF – Common Intermediate Format
CMAC – Cipher-Based Message Autentification Code
COFDM – Coded Orthogonal Frequency Division Multiplexing
CP – Content Protection
CPE – Common Phase Error
CRC – Cyclic Redundancy Check
CSI – Channel-State Information
DAB – Digital Audio Broadcasting
DAC – Digital-to-Analog Converter
DAT – Digital Audio Tape
DBPSK – Differential Binary Phase Shift Keying
DBS – Direct Broadcast Satellite
DC – Direct Current
DCT – Discrete Cosine Transform
DES – Data Encryption Standard
DFT – Discrete Fourier Transform
DPCM – Differential Pulse Code Modulation
DQPSK – Differential Quadrature Phase-Shift Keying
DRM – Digital Rights Managemen
DTH – Direct To Home
DTTV Or DTT – Digital Terrestrial Television
DVB-DSNG – DVB-Digital Satellite News Gathering
DVB-T – Digital Video Broadcasting Terrestrial
DVB-C – Digital Video Broadcasting Cable
DVB-S – Digital Video Broadcasting Satelite
DVB-H – DVB-Handheld
DVB-SH – DVB-Satellite to Handhelds
DVB-NGH – DVB-Next Generation Handheld
DVB-RCS – Return Channel System for Satellite
DVB-RCT – Return Channel System for Terrestrial TV

8
DVB-RCC – Return Channel System for Cable TV
DVD – Digital Versatile Disc
DVI – Digital Visual Interface
ECC – Elliptic Curve Cryptography
EDTV – Enhanced Definition Television
EEPROM – Electrically Erasable Programmable Read-Only Memory
ES – Elementary Stream
EPG – Electronic Programm Guide
FEC – Forward Error Correction
FFT – Fast Fourier Transform
FIFO – First-In, First-Out Shift Register
FRAM – Ferroelectric Random Access Memory
FSK – Frequency-Shift Keying
GA – Guard Interval
GOP – Group Of Pictures
HD, HDTV – High Definition Television
HDMI – High-Definition Multimedia Interface
HP – High Priority
ICI – Inter-Carrier Interference
IFFT – Inverse Fast Fourier Transform
IIR – Infinite Impulse Response
IP – Internet Protocol
ISI – Inter-Symbol Interference
JND – Just Noticeable Difference
JPEG – Joint Photographic Experts Group
LAN – Local Area Network
LDPC – Low Density Parity Check
LDTV – Limited Definition Television
LP – Low Priority
LP – Linear Prediction
LPC – Linear Prediction Coefficients
MAC – Message Autentification Code
MACL – Medium Access Control Layer
MDCT – Modified Discrete Cosine Transform
MMU – Memory Management Unit
MPE – Multiprotocol Encapsulation
MPEG – Moving Picture Coding Experts Group
MPQM – Moving Picture Quality Metrics
MPEG-J – Framework for MPEG Java API’s
MPQM – Moving Picture Quality Metrics
MSB – Most Significant Bit
MUX – MultipleX
NACK – Negative Acknowledgment
NICAM – Near-Instantaneous Companded Audio Multiplex
NRZ – Non-Return to Zero
OOK – On-Off Keying
OCF – Optimal Coding in the Frequency Domain
PAM – Pulse Amplitude Modulation
PAL – Phase Alternating Line
PAPR – Peak Average Power Ratio
PARCOR – Partial Correlation Coefficient
Parity bit – is a bit added to the end of a string of binary code that indicates whether the number of bits in the string with
the value one is even or odd
PAT – Program Association Table
Payload – referred to as the actual or body data
PCM – Pulse Code Modulation
PCR – Program Clock Reference
PDA – Personal Digital Assistant
PDH – Plesiochronous digital hierarchy
PES – Packetized Elementary Stream

9
PID – Packet Identification Field
PMT – Program Map Table
PPDN – Polyphase Decomposition Network
PRBS – Pseudo-Random Binary Sequence
PS – Program Stream
PSK – Phase-Shift Keying
PCC – Punctured Convolutional Code
QAM – Quadrature Amplitude Modulation
QCIF – Quarter Common Intermediate Format
QEF – Quasi Error Free
QPSK – Quadrature Phase Shift Keying
QAM – Quadrature amplitude modulation
QoS – Quality of Service
RAM – Random Access Memory
RF – Radio Frequency
ROM – Read-Only Memory
RRC – Root-Raised-Cosine
RS – Reed-Solomon
RSA – RSA stands for Ron Rivest, Adi Shamir and Leonard Adleman, who first publicly described the algorithm in 1977.
It is one of the first practicable public-key cryptosystems;
RZ – Return to Zero
SAM – Secure Access Module
SBC – Sub-Band Coding
S&H – Sample-and-Hold
SD – Standart Definition
SDH – Synchronous Digital Hierarchy
SDTV – Standard Definition Television
SECAM – Système Sequentiel Couleur A Mémoire
SER – Symbol Error Rate
SFN – Single Frequency Network
SIF – Source Intermediate Format
SMPTE – Society of Motion Picture and Television Engineers
SNR – Signal to Noise Ratio
SPL – Sound Power Level
SRRC – Square-Root-Raised-Cosine
SRS – Sampling Rate Scalable
STB – Set-Top-Box
TCP – Transmission Control Protocol
TF – Transmission Frame
TNS – Temporal Noise Shaping
TPS – Transmission Parameter Signalling
TS – Transport Stream
TV – Television
UHF – Ultra-High Frequency
VCM - Variable Coding and Modulation
VHF – Very-High Frequency
Vocoder – Voice Coder
VOD – Video on Demand
VQ – Vector Quantization
ZigBee – is a specification for a suite of high level communication protocols used to create personal area networks built
from small, low-power and relatively cheap digital radios

10
LIST of FIGURES
Fig. 1.1. Illustration of the main television principle ------------------------------------------------------------------------ 18
Fig. 1.2. Nipkow disk for a 16-line picture;(picture capturer - transmitter) --------------------------------------------- 19
Fig. 1.3. Basic mirror drum construction -------------------------------------------------------------------------------------- 19
Fig. 1.4. Representation of progressive scanning (625 lines) -------------------------------------------------------------- 20
Fig. 1.5. Representation of interlaced scanning (625 lines) ---------------------------------------------------------------- 20
Fig. 1.6. Illustration of a composite monochrome video signal ------------------------------------------------------------ 21
Fig. 1.7. Illustration of a composite color video signal PAL or NTSC --------------------------------------------------- 24
Fig. 1.8. Frequency spectrum of the PAL signal ----------------------------------------------------------------------------- 24
Fig. 1.9. Color plan of the NTSC system -------------------------------------------------------------------------------------- 25
Fig. 2.1. Simplified structure of the human eye ------------------------------------------------------------------------------ 29
Fig. 2.2. Simplified structure of retina ----------------------------------------------------------------------------------------- 31
Fig. 2.3. The sensitivity of the different cones (S, M, L) and rods (R) to varying wavelengths ---------------------- 31
Fig. 2.4. Illustration of the encoding of cone signals into opponent color’s signals in the human visual system - 33
Fig. 2.5. Newton‘s color wheel -------------------------------------------------------------------------------------------------- 34
Fig. 2.6. Goethe‘s color triangle ------------------------------------------------------------------------------------------------- 34
Fig. 2.7. The CIE 1931 xy chromaticity space -------------------------------------------------------------------------------- 34
Fig. 2.8. Primary and secondary colors for RGB and CMYK models ---------------------------------------------------- 36
Fig. 2.9. RGB and CMY Color 3-D Models ---------------------------------------------------------------------------------- 38
Fig.3.1. Cross-section of the human ear --------------------------------------------------------------------------------------- 41
Fig.3.2. Functional diagram of the human ear -------------------------------------------------------------------------------- 41
Fig. 3.3. Equal loudness curves corresponding to threshold of the quiet and pain limit ------------------------------- 44
Fig. 3.4. Illustration of time masking ------------------------------------------------------------------------------------------ 45
Fig. 3.5. Illustration of frequency masking ------------------------------------------------------------------------------------ 46
Fig. 3.6. Resonant frequencies versus position along the basilar membrane -------------------------------------------- 46
Fig. 3.7. The critical band versus central frequency ------------------------------------------------------------------------- 47
Fig. 3.8. Relationship between the frequency scale and mel-scale -------------------------------------------------------- 48
Fig. 3.9. Mel scale filterbank ---------------------------------------------------------------------------------------------------- 49
Fig. 3.10. A schematic diagram of the human speech production system ------------------------------------------------ 49
Fig. 3.11. An example of glottal volume velocity ---------------------------------------------------------------------------- 49
Fig. 3.12. A block diagram of human speech production ------------------------------------------------------------------- 50
Fig. 3.13. Rosenberg approximation of glottal pulse ------------------------------------------------------------------------ 51
Fig. 3.14. Generation of the exitation signal for voiced speech ------------------------------------------------------------ 51
Fig. 3.15. Generation of the exitation signal for unvoiced speech--------------------------------------------------------- 51
Fig. 3.16. The simplest physical model of vocal tract ----------------------------------------------------------------------- 51
Fig. 3.17. Representation of vocal tract as a concatenation of lossless acoustic tubes --------------------------------- 52
Fig. 3.18. Direct form implementation of digital filter system function describing vocal tract ---------------------- 52
Fig. 3.19. General model for speech production ------------------------------------------------------------------------------ 53
Fig. 4.1. Analog-to-digital converter ------------------------------------------------------------------------------------------- 54
Fig. 4.2. Analog signal reconstruction system -------------------------------------------------------------------------------- 54
Fig. 4.3. Illustration of ideal sampling process ------------------------------------------------------------------------------- 55
Fig.4.4. Illustration of undersampling effects --------------------------------------------------------------------------------- 57
Fig.4.5. A complete design of digital (PCM) signal generation system -------------------------------------------------- 58
Fig. 4.6. Illustration of flat-top sampling -------------------------------------------------------------------------------------- 59
Fig. 4.7. Illustration of waveforms in a PCM system ------------------------------------------------------------------------ 60
Fig. 4.8. SNR relation to signal value and PCM code word bit number -------------------------------------------------- 61
Fig. 4.9. Position of samples in the 4:2:2 format ----------------------------------------------------------------------------- 67

11
Fig. 4.10. Position of samples in the 4:2:0 format --------------------------------------------------------------------------- 68
Fig. 4.11. Position of samples in the SIF format ----------------------------------------------------------------------------- 68
Fig. 5.1. Approximations of voice analog signal probability density function ------------------------------------------ 71
Fig. 5.2. Input-output relations for an A-law characteristic ---------------------------------------------------------------- 72
Fig. 5.3. Distribution of quantization levels for the A-law 3-bit quantizer with stand 87,56A A ---------------- 72
Fig. 5.4. Output SNR versus input signal level of 8-bit PCM systems with and without companding-------------- 73
Fig. 5.5 Practical approximation of A-law characteristic -------------------------------------------------------------------- 73
Fig. 5.6. PCM code word structure --------------------------------------------------------------------------------------------- 73
Fig. 5.7. Block diagram representation of adaptive quantization with variable step size ------------------------------ 74
Fig. 5.8. Block diagram representation of adaptive quantization with variable gain ----------------------------------- 74
Fig. 5.9. Block diagram of feed-forward adaptive quantizer with time varying step size ----------------------------- 75
Fig. 5.10. Block diagram of feed-forward quantizer with time varying gain -------------------------------------------- 75
Fig. 5.11. Examples of the RMS value estimates and corresponding signal waveforms ------------------------------ 78
Fig. 5.12. Examples of the RMS value estimates and corresponding signal waveforms ------------------------------ 81
Fig. 5.13. Block diagram of feed-backward adaptive quantizer with time varying step size ------------------------- 82
Fig. 5.14. Block diagram of feed-backward adaptive quantizer with time varying gain ------------------------------ 82
Fig. 5.15. Autocorrelation function estimate for speech signal ------------------------------------------------------------ 83
Fig. 5.16. General block diagram of differential quantizer ----------------------------------------------------------------- 84
Fig. 5.17. Illustration of vector quantization with L=25 two-dimensional (m=2) code vectors ---------------------- 86
Fig. 5.18. Illustration of vector quantization principle ---------------------------------------------------------------------- 86
Fig. 6.1. Image example ---------------------------------------------------------------------------------------------------------- 89
Fig. 6.2. Horizontal correlation coefficient for luminance component of the image in Figure 6.1 ------------------ 89
Fig. 6.3. Illustration of Huffmann tree building ------------------------------------------------------------------------------ 91
Fig. 6.4. Illustration of assignment of codes to the symbols ---------------------------------------------------------------- 91
Fig, 6.5. Illustration of 1-D prediction ----------------------------------------------------------------------------------------- 93
Fig. 6.6. Illustration of 2-D prediction ----------------------------------------------------------------------------------------- 94
Fig. 6.7. Initial stage of motion-compensated prediction procedure ------------------------------------------------------ 95
Fig. 6.8. Search area in the prediction picture for the selected block in the current picture and generation
of block in motion compensated picture --------------------------------------------------------------------------- 96
Fig. 6.9. Illustration of current block and search area ----------------------------------------------------------------------- 96
Fig. 6.10. Illustration of search procedure ------------------------------------------------------------------------------------- 96
Fig. 6.11. Block diagram of motion compensated encoder ----------------------------------------------------------------- 97
Fig. 6.12. Block diagram of matching decoder ------------------------------------------------------------------------------- 98
Fig. 6.13. Block diagram of lossy motion compensated encoder ---------------------------------------------------------- 98
Fig. 6.14. Typical rate-distortion curve ---------------------------------------------------------------------------------------- 99
Fig. 6.15. Graphical view of 8 basic functions for 1-D DCT ------------------------------------------------------------- 102
Fig. 6.16. Basic vectors for 2-D DCT ---------------------------------------------------------------------------------------- 103
Fig. 6.17. Illustration of zig-zag scanning order ---------------------------------------------------------------------------- 105
Fig. 6.18. Zig-zag scan order of quantized DCT coefficients ------------------------------------------------------------ 105
Fig. 6.19. Motion-compensated prediction difference DCT encoder --------------------------------------------------- 106
Fig. 6.20. Motion-compensated prediction difference DCT decoder --------------------------------------------------- 106
Fig. 7.1. Linear prediction filter ----------------------------------------------------------------------------------------------- 108
Fig. 7.2. Block diagram of prediction error filter --------------------------------------------------------------------------- 108
Fig. 7.3. Final block diagram of speech synthesis filter ------------------------------------------------------------------- 109
Fig. 7.4. Variation of prediction error versus predictor order ------------------------------------------------------------ 113
Fig. 7.5. Illustration of sliding window technique ------------------------------------------------------------------------- 114
Fig. 7.6. Some most popular windows --------------------------------------------------------------------------------------- 114
Fig. 7.7. Two possible average spectra of speech signal ------------------------------------------------------------------ 115

12
Fig. 7.8. Frequency response of pre-emphasis filter ----------------------------------------------------------------------- 115
Fig. 8.1. Basic sub-band coding scheme ------------------------------------------------------------------------------------- 116
Fig. 8.2. Illustration of the sub-band decomposition and reconstruction principles ---------------------------------- 117
Fig. 8.3. Basic block diagram of a Layer 1 encoder ----------------------------------------------------------------------- 118
Fig. 8.4. Grouping of sub-band samples for Audio Layers 1, 2, 3------------------------------------------------------- 119
Fig. 8.5. ISO/MPEG/Audio Layer 1 frame structure; valid for 384 PCM audio input samples, duration 8 ms
with a sampling rate of 48 kHz ------------------------------------------------------------------------------------- 119
Fig.8.6. Basic block diagram of a Layer 1 decoder ------------------------------------------------------------------------ 120
Fig. 8.7. Basic block diagram of a Layer 2 encoder ----------------------------------------------------------------------- 120
Fig. 8.8. ISO/MPEG/Audio Layer 2 frame structure; valid for 1152 PCM audio input samples, duration 24 ms
with a sampling rate of 48 kHz ------------------------------------------------------------------------------------- 121
Fig. 8.9. Basic block diagram of a Layer 3 encoder ----------------------------------------------------------------------- 122
Fig. 8.10. MPEG Audio Layer 3 filter bank processing ------------------------------------------------------------------- 122
Fig. 8.11. MDCT window types and arrangement of transition between overlapping long and short
window types -------------------------------------------------------------------------------------------------------- 123
Fig. 8.12. Huffman partitions -------------------------------------------------------------------------------------------------- 124
Fig. 8.13. The arrangement of the various bit fields in a Layer 3 bit stream ------------------------------------------ 124
Fig. 8.14. Structure of MPEG-2 advanced audio coder ------------------------------------------------------------------- 127
Fig. 9.1. A typical digital TV transmission setup -------------------------------------------------------------------------- 130
Fig. 9.2. MPEG-2 audio and video systems at transmission side -------------------------------------------------------- 132
Fig. 9.3. Video elementary stream format ----------------------------------------------------------------------------------- 133
Fig. 9.4. Header for MPEG-2 video elementary stream ------------------------------------------------------------------- 133
Fig. 9.5. Packetized elementary stream header ----------------------------------------------------------------------------- 133
Fig. 9.6. Possible data streams in multiple program mode ---------------------------------------------------------------- 134
Fig. 9.7. MPEG-2 audio and video systems at reception side ------------------------------------------------------------ 135
Fig. 9.8. Arrangement of the PESs in an MPEG-2 transport stream ---------------------------------------------------- 135
Fig. 9.9. The structure of the transport packet and its header ------------------------------------------------------------ 136
Fig. 9.10. Multiplexed audio and video packets in MPEG transport stream ------------------------------------------- 136
Fig. 9.11. Illustration of insertion of signaling tables ---------------------------------------------------------------------- 137
Fig. 10.1. Three layers around the protected contents --------------------------------------------------------------------- 140
Fig. 10.2. The major components of the DVB-CA architecture --------------------------------------------------------- 141
Fig. 10.3. Illustration of the ECM and EMM generation process ------------------------------------------------------- 142
Fig. 10.4. Illustration of decryption of the control words from CM and EMM --------------------------------------- 142
Fig. 10.5. Illustration of the process of finding ECM and EMM in the transport stream ---------------------------- 143
Fig. 10.6. The components of the DVB-CA architecture integrated in DVB data network ------------------------- 145
Fig. 11.1. Tapped shift register ------------------------------------------------------------------------------------------------ 147
Fig. 11.2. Illustrative binary scrambler and descrambler ----------------------------------------------------------------- 148
Fig. 11.3. Shift register sequence generator --------------------------------------------------------------------------------- 149
Fig. 11.4. Sync words for frame synchronization -------------------------------------------------------------------------- 149
Fig. 12.1. Illustration of block interleaving and adding of parity bits--------------------------------------------------- 153
Fig. 12.2. Convolutional interleaving – deinterleaving scheme---------------------------------------------------------- 154
Fig. 12.3. The organization of an RS code with m=8, k=223 and r=32 ------------------------------------------------ 156
Fig. 12.4. Convolutional encoder (2, 1, 3) with V=2, L=1, M=3 --------------------------------------------------------- 157
Fig. 12.5. Punctured (3, 2, 3) code encoder composed from two (2, 1, 3) encoders ---------------------------------- 158
Fig. 12.6. Block diagram of an encoder for L=3---------------------------------------------------------------------------- 158
Fig. 12.7. Illustration of encoding of two bit sequence -------------------------------------------------------------------- 158
Fig. 12.8. A state diagram for the (2,1,3) code ----------------------------------------------------------------------------- 160
Fig. 12.9. Tree diagram of (2,1,3) code -------------------------------------------------------------------------------------- 161

13
Fig. 12.10. Trellis diagram for (2,1,3) code --------------------------------------------------------------------------------- 162
Fig. 12.11. Sequential decoding path search -------------------------------------------------------------------------------- 163
Fig. 12.12. Setting the threshold in sequential decoding ------------------------------------------------------------------ 165
Fig. 12.13. Viterbi decoding; Step 1 ------------------------------------------------------------------------------------------ 166
Fig. 12.14. Viterbi decoding; Step 2 ------------------------------------------------------------------------------------------ 167
Fig. 12.15. Viterbi decoding; Step 3 ------------------------------------------------------------------------------------------ 167
Fig. 12.16. Viterbi decoding; Step 4 ------------------------------------------------------------------------------------------ 167
Fig. 12.17. Viterbi decoding; Step 5 ------------------------------------------------------------------------------------------ 168
Fig. 12.18. Viterbi decoding; Step 6 ------------------------------------------------------------------------------------------ 168
Fig. 12.19. Viterbi decoding; Step 7 ------------------------------------------------------------------------------------------ 168
Fig. 12.20. Viterbi decoding; Step 8 ------------------------------------------------------------------------------------------ 168
Fig. 13.1. A cosinusoidal signal ----------------------------------------------------------------------------------------------- 170
Fig. 13.2. Rotating phasor ------------------------------------------------------------------------------------------------------ 172
Fig. 13.3. Illustration of rotating phasor projections on the real and imaginary axis --------------------------------- 172
Fig. 13.4. Illustration examples of the simplest digitally modulated signals ------------------------------------------ 173
Fig. 13.5. Illustration example of 8-QAM modulated signal ------------------------------------------------------------- 175
Fig. 13.6. Examples of simple signals and their constellation diagrams ----------------------------------------------- 175
Fig. 13.7. Examples of constellation diagrams and corresponding 4-ASK and 4-PSK signals --------------------- 176
Fig. 13.8. Constellation diagrams for 8-APSK, 16-APSK, Gray encoded 8-PSK and square 16-QAM ---------- 176
Fig. 13.9. Illustration of the influence of constellation points coding to signal resistance to noise ---------------- 176
Fig. 13.10. Schematic block diagram of quadrature modulator and demodulator ------------------------------------ 177
Fig. 13.11. Illustration of ISI on received pulses; Ts is the symbol period (in the partial case, the bit period) -- 178
Fig. 13.12. Characteristics of raised-cosine filter for three values of the roll-off factor ----------------------------- 178
Fig. 13.13. Frequency responses of Nyquist filter (RC filter) caused by a series of pulses ------------------------- 179
Fig. 13.14. Typical frequency response of a time-varying channel example ------------------------------------------ 180
Fig. 13.15. Illustration of intersymbol interference formation ----------------------------------------------------------- 182
Fig. 13.16. Illustration of COFDM signal spectrum ----------------------------------------------------------------------- 183
Fig. 13.17. Illustration of the formation of a guard interval -------------------------------------------------------------- 184
Fig. 13.18. Signal processing diagrams; (a) – at the transmitter, (b) – at the receiver ------------------------------- 185
Fig. 13.19. Illustration of inserting pilot cells as is used in DVB-T ----------------------------------------------------- 186
Fig. 14.1. Functional block diagram of the DVB-T system -------------------------------------------------------------- 188
Fig. 14.2. MPEG-2 transport stream packet --------------------------------------------------------------------------------- 189
Fig. 14.3. Scrambler/descrambler schematic diagram --------------------------------------------------------------------- 190
Fig. 14.4. Randomized transport stream packets: Sync bytes and randomized data bytes -------------------------- 190
Fig. 14.5. Reed-Solomon RS(204,188,8) error protected packet -------------------------------------------------------- 190
Fig.14.6. Conceptual diagram of the outer interleaver and deinterleaver; Interleaving depth l=12; --------------- 191
Fig. 14.7. Data structure after outer interleaving --------------------------------------------------------------------------- 191
Fig. 14.8. The sequences of bytes at the different points of interleaver / deinterleaver ------------------------------ 192
Fig. 14.9. Punctured convolutional code encoder for inner coding ----------------------------------------------------- 192
Fig. 14.10. Inner coding and interleaving------------------------------------------------------------------------------------ 193
Fig. 14.11. Mapping of input bits onto output modulation symbols for 16-QAM system -------------------------- 194
Fig. 14.12. 16-QAM constellations for DVB-T system ------------------------------------------------------------------- 196
Fig. 14.13. Transmission frame for the DVB-T signal -------------------------------------------------------------------- 197
Fig. 14.14. Conceptual block diagram of elements at the cable head-end and receiver ----------------------------- 199
Fig. 14.15. Byte to 6-bit symbol conversion for 64-QAM modulation ------------------------------------------------- 200
Fig. 14.16. Example implementation of the byte to m-tuple conversion and the differential encoding
of the two MSBs -------------------------------------------------------------------------------------------------- 200
Fig. 14.17. The DVB-C constellation diagram for 16-QAM ------------------------------------------------------------- 201

14
Fig. 14.18. Functional block diagram of the DVB-S system ------------------------------------------------------------- 203
Fig. 14.19. QPSK constellation used in DVB-S system------------------------------------------------------------------- 203
Fig. 15.1. Block diagram of an encoder of an MPEG-4 I-frame --------------------------------------------------------- 207
Fig. 15.2. Block diagram of an encoder of an MPEG-4 P-frame ........................................................................ 207
Fig. 15.3. Generic block diagram of the CABAC entropy coding scheme ......................................................... 215
Fig. 15.4. An example for a Tanner graph .......................................................................................................... 217
Fig. 15.5. DVB-H Frame structure ...................................................................................................................... 220
Fig. 15.6. Representation of the physical-layer framing structure of DVB-S2 system ....................................... 225
Fig. 15.7. Rotated 16-QAM ................................................................................................................................ 229
Fig. 15.8. DVB-T2 typical system architecture ................................................................................................... 230

15
LIST of TABLES
Table 4.1. Various interpretations of 3 bit code words ---------------------------------------------------------------------- 62
Table 4.2. Natural binary and Gray 3 bits code words ---------------------------------------------------------------------- 63
Table 4.3. Parameters of various PCM signals ------------------------------------------------------------------------------- 64
Table 4.4. Modulation type and required bandwidth for transmission rate of 108 Mb/s ------------------------------ 66
Table 5.1. Step size multipliers for adaptive feed-backward quantization of speech signals ------------------------- 83
Table 5.2. Signal-to-noise ratios using various quantizers with B=4 for the same speech material ----------------- 83
Table 6.1. Calculation of the average information quantity for four symbols ------------------------------------------ 90
Table 6.2. Illustration of decoding procedure -------------------------------------------------------------------------------- 92
Table 6.3. The values of the Hadamard functions ( , 1, 2,...m
H m ) --------------------------------------------------- 100
Table 6.4. Intermediate and final results of Hadamard inverse transformation calculation ------------------------- 100
Table 8.1. List of the configuration used in MPEG audio coding standards ------------------------------------------ 118
Table 8.2. Coding tools used in MPEG-2 AAC ---------------------------------------------------------------------------- 128
Table 10.1. Main conditional access systems ------------------------------------------------------------------------------- 146
Table 11.1. Illustrative scrambler input, output and register cells contents ------------------------------------------- 148
Table 12.1. Generator Polynomials for good rate 1/2 codes [85] ------------------------------------------------------- 157
Table 12.2. Producing a coded sequence ------------------------------------------------------------------------------------ 159
Table 12.3. Look-up table for the encoder (2,1,3) ------------------------------------------------------------------------- 159
Table 12.4. Bit agreement as a metric for decision between the received sequence and the 8 possible
valid code sequences --------------------------------------------------------------------------------------------- 163
Table 12.5. Each branch has a Hamming metric depending on what was received and the valid code
words at that state ------------------------------------------------------------------------------------------------- 166
Table 13.1. Correspondence between signal amplitudes and phases, and bit values--------------------------------- 174
Table 14.1. Puncturing pattern and transmitted sequence after parallel-to-serial conversion for the possible
code rates----------------------------------------------------------------------------------------------------------- 193
Table 14.2. Demultiplexer’s mapping rules for 16-QAM modulation ------------------------------------------------- 194
Table 14.3. Permutation functions of bit-wise interleavers -------------------------------------------------------------- 195
Table 14.4. Main parameters of the DVB-T terrestrial system ---------------------------------------------------------- 199
Table 14.5. Truth table for differential coding ----------------------------------------------------------------------------- 201
Table 14.6. Conversion of constellation points of quadrant 1 to other quadrants of the constellation diagram - 201
Table 14.7. Available bit rates (Mbit/s) for DVB-C system [88] ------------------------------------------------------- 202
Table 15.1. Exponential Golomb Code (for data elements other than transform coefficients) --------------------- 214
Table 15.2. Overview over messages received and sent by the C-nodes in step 2 of the message passing algorithm
------------------------------------------------------------------------------------------------------------------------------ 218
Table 15.3. Step 3 of the described decoding algorithm ------------------------------------------------------------------ 218
Table 15.4. Modes and features of DVB-S2 in comparison to DVB-S ------------------------------------------------ 224
Table 15.5. Comparison of available modes in DVB-T and DVB-T2 ------------------------------------------------- 230
Table 15.6. Example of MFN mode in the United Kingdom ------------------------------------------------------------ 231

16
INTRODUCTION "Attention, the Universe! By kingdoms, right wheel!" This phrase is the first telegraph message
sent over a 16-km line by Samuel F. B. Morse in 1838. With this message a new era, the era of
electrical communication, was born. Until our times communication engineering had advanced to the
point that earthbound TV viewers could watch astronauts working in space. Telephone, radio, and
television have become integral parts of modern life. Certainly great steps have been made since the
days of Morse. Equally certain, coming years will bring many new achievements of communication
engineering.
This textbook presents an introduction to digital television technologies. Its purpose is to
describe and explain, as simply and as completely as possible, the various aspects of the very complex
problems and solutions chosen for the European Digital Video Broadcasting (DVB) system.
The textbook is one of the results of the activities carried under the Leonardo da Vinci program
project „Education Course of Digital TV Technologies for Vocational Educational Schools” (Project
nr. 2013-1-LV1-LEO05-05127).
The aim of the textbook writing was to help vocational students from project partners’
countries: Latvia, Lithuania, Estonia and Denmark to acquire new skills, knowledge and
qualifications in area of digital TV technologies and to enhance their competitiveness in the labor
market. The textbook is intended for readers with elementary backgrounds in electronics and
communication systems. Some basic knowledge of digital communication system principles, signal
digitization and compression, error control coding and of conventional analog television is presented
in this book for those who require it.
We begin here with a descriptive overview that establishes a perspective for the chapters that
follow.
The first chapter provides an overview of television development history beginning from
Nipkow disk and including monochrome, color and digital televisions. Also the main television
principle based on synchronized scanning of input picture at the transmission side and of electron
beam across a TV screen at the reception side is shortly described.
The second chapter deals with the human eye anatomic structure and functions of its component
parts, with the principles of color vision. Also a short historical overview of color models
development and some basic modern color models used in television as RGB, YUV, YCbCr are
introduced.
In the third chapter the aspects of human ear, that are critical in determining subjective audio
quality, and the elements of speech production system model, whereof directly follow the methods
of speech compression, are introduced.
Chapter 4 describes the general principles of signal digitization separately touching on a
question about digitization of video signals. The questions concerning the Nyquist-Shennon sampling
theorem, pulse code modulation and video signals digitization formats are discussed.
Chapter 5 covers the characteristics of video material, describes the signal processing used to
reduce the spatial and temporal redundancy of digital video signals, with paragraphs describing
predictive coding, prediction with motion compensation and transform coding.
The principles of the linear predictive analysis of speech signals are analyzed in the sixth
chapter. The material presented here seems to be a little bit too puzzling. Therefore it could be omitted
by the first reading.
The seventh chapter step by step introduces the readers into the world of speech and audio
signals compression methods beginning from the simplest one, based on the non-uniform quantizing,
and finishing with more complex ones, based on sub-band filtering. The specific audio compression
methods used by the MPEG-1, MPEG-2 and MPEG-4 standards are described as well.
Chapter 8 deals with the formation principles of multimedia programs and of MPEG transport
stream structure, which will be later used for demultiplexing and decompression in a digital TV
receiver.

17
To protect a DVB data-network, the DVB standard integrates into its broadcasting
infrastructure an access control mechanism, commonly known as Conditional Access. This enables
the broadcasting industry to offer hundreds of pay-TV channels to consumers. The conditional access
system architecture and operation is the subject analyzed in chapter 9.
Chapter 10 discusses the subject of randomization of bit or symbol streams in order to avoid
long runs of identical symbols what could make receiver incapable to extract timing information
needed for correct operation of any communication system. The structure and operation of
randomization/de-randomization units (scramblers/descramblers) are here analyzed. Some
elementary questions about generation of pseudo-random noise and frame synchronization are also
discussed.
Chapter 11 serves to provide a view of coding for error correction. General questions of block
codes and Reed-Solomon codes are considered as well as convolutional coding and sequential and
Viterbi algorithm decoding. In addition, a discussion of block and convolutional interleaving is also
here included.
An understanding of modulation as one of the main processes of signal transmission theory and
praxis is introduced in chapter 12. An economical representation of modulated signals in the form of
constellation is presented. Various types of digital modulations beginning from the simplest as Binary
Phase Shift Keying (BPSK) and finishing with Coded Orthogonal Frequency Division Multiplexing
(COFDM) are analyzed.
Chapter 13 is devoted to analysis of Digital Video Broadcasting (DVB) systems: DVB-T
(terrestrial), DVB-C (cable) and DVB-S (satellite). The functional diagrams of the systems are
presented. The functions and operation of systems’ blocks are explained.
Finally chapter 14 looks at state of the art and perspectives of digital TV. Some relatively new
and already used in praxis systems, as High Definition TV (HDTV) and just coming to the praxis, as
DVB-T2 are shortly described.
We are pleased to acknowledge our indebtedness to our project partners prof. Reza Tadayoni,
prof. Knud Erik Scouby, researcher/lecturer Romass Pauliks for useful discussions on contents of the
book.

18
1. TELEVISION HISTORY
1.1. Main Television Principle
Before analyzing the historical stages of television it is useful to consider a basic outline of how
television itself works. To provide a moving black and white (monochrome TV) picture it is needed
to record, transmit and display information about a two-dimensional pattern of brightness. Nominally,
it is needed to specify how the brightness of every point in a picture varies in time in parallel. In
practice, the technique called raster scanning is used to convert a series of still pictures into a single
serial data stream.
A light sensor scans a predefined path over the picture and reads out how the picture brightness
varies along each line in turn (see Figure 1.1). The arrangement of lines and the order/speed/direction
in which they're scanned is called the raster pattern used by the TV system. This scanning process
means it is possible to get from the sensor a single time-varying pattern which points how to
reconstruct the picture using a TV receiver. This is normally done by scanning an electron beam
across a screen which is covered with a phosphor (a class of chemicals which fluoresce when it is
illuminated with electrons). The signal coming from the TV transmitter at every instant is used to
control the intensity of the electron beam.
In order for the system to work correctly it is needed to ensure that the raster patterns at the
transmitter (in the video camera) and the TV receiver are the same. It must be ensured that the two
raster scans were correctly synchronized.
TV Transmitter
TV Receiver
Input picture
TV Screen
Camera sensor
Electron gun
Raster of lines
drawn on TV screen
Fig. 1.1. Illustration of the main television principle
1.2. Development of Monochrome Television
Television came into being based on the inventions and discoveries of many men and scientists.
At the dawn of television history there were two distinct paths of technology experimented with by
researchers. Early inventors attempted to either build a mechanical television system based on the
technology of Paul Nipkow's rotating disk; or to build an electronic television system using a cathode
ray tube (CRT) developed in 1897 by German inventor F. Braun and proposed for image
reconstruction in 1907 by Russian scientist Boris Rosing and independently 1910 by English inventor
A. A. Campbell-Swinton [1, 2]. However the 'first' generation of television sets was not entirely
electronic.
German, Paul Nipkow developed a rotating-disk technology to transmit pictures over wire in
1884 called the Nipkow disk. Paul Nipkow was the first person to discover television's scanning
principle, in which the light intensities of small portions of an image are successively analyzed and
transmitted. Figure 1.2 shows a schematic picture of the 1884/85 Nipkow’s rotating disk image
scanner. Although he never built a working model of the system, his rotating disk became exceedingly
common, and remained in use until 1939.

19
In 1889 J. L. Weiller introduced the mirror drum as a scanning device. In its original form, there
were as many mirrors as there were lines in the picture and each mirror was tilted at a different angle
compared to the axis of the drum. For horizontal scanning, the mirror drum axle was supported in a
vertical plane. Therefore for vertical scanning, the axle was horizontal. As it rotated, each mirror
caused a line to be scanned below (horizontal scan) or beside (vertical scan) the previous one. The
drawing shown in Figure 1.3 is of a basic vertically scanned mirror drum system. In this drawing, the
modulated light originates at a small aperture, and then passes through a projection lens. This lens is
adjusted so that the light at the aperture itself is focused on the screen. Of course, in order for the light
to get there, it must be reflected off of mirrors on the drum. The mirrors are thereby able to control
the position of the light spot on the screen as it rotates. Since each mirror is carefully set at a different
but proper angle, as the drum rotates, the focused light spot takes on the appearance of a set of parallel
horizontal or vertical lines, commonly referred to as a raster. With proper modulation of the light it
is possible to have a picture.
Within a few more years, there were numerous other scanners proposed, both lens and aperture
types and some that used slots instead of holes.
Light source
Photographic
image
Phototube
Electrical signal
sent to receiver
Direction of
disc rotation
Mirrors
Screen
LensApperture
Fig. 1.2. Nipkow disk for a 16-line picture;(picture
capturer - transmitter)
Fig. 1.3. Basic mirror drum construction
At that time the mechanical display (TV screen) had a small motor with a rotating disk and a
neon lamp, which worked together to give a blurry reddish-orange picture about half the size of a
business card [3]. The period before 1935 is called the "Mechanical Television Era". This type of
television is not compatible with today's fully-electronic television system. Electronic television
systems worked better and eventual replaced mechanical systems.
Already in 1907 B. Rosing proposed the idea of a hybrid system with Nipkow‘s disk or spinning
mirror for image scanning and CRT for image reconstruction. In 1910 A. A. Campbell-Swinton
proposed the idea with CRT for image scanning and representation.
In 1911 professor of St. Petersburg Institute of Technology B. Rosing and his student, later
Russian-American inventor and engineer, V. K. Zworykin demonstrated the working hybrid TV
system with CRT as a receiver, and a mechanical device as a transmitter. This demonstration, based
on an improved design, was among the first demonstrations of TV of any kind.
In the 1920's, John Logie Baird patented the idea of using arrays of transparent rods to transmit
images for television. Baird's 30 line images were the first demonstrations of television by reflected
light rather than back-lit silhouettes. J. L. Baird based his technology on Paul Nipkow's scanning disk
idea and later developments in electronics. He was the first person in the world to demonstrate a
working television system. On January 26th, 1926, a viable television system was demonstrated using
mechanical picture scanning with electronic amplification at the transmitter and at the receiver. The
raster consisted of 30 lines and 5 images per second, later 12,5 images per second. This low definition
resulted in a video bandwidth of less than 10 kHz, allowing these pictures to be broadcast on an
ordinary AM/MW or LW transmitter. The signal could be sent by radio or over ordinary telephone

20
lines, leading to the historic trans-Atlantic transmissions of television from London to New York in
February, 1928.
Charles Jenkins invented a mechanical television system called radio vision and claimed to
have transmitted the earliest moving silhouette images on June 14, 1923.
The first electronic television systems were based on the development of the CRT, which is the
picture tube found in modern TV sets.
V. Zworykin invented an improved CRT called the kinescope in 1929. The kinescope tube was
sorely needed for television. Zworykin was one of the first to demonstrate a television system with
all the features of modern picture tubes.
In 1927, Philo Farnsworth was the first inventor to transmit a television image comprised of 60
horizontal lines. The image transmitted was a dollar sign. Farnsworth developed the dissector tube,
the basis of all current electronic televisions.
The resolution soon improved to 90, and 120 lines and then stabilized for a while on 180 lines
(Germany, France) or 240 lines (England, the United States) around 1935. Scanning was progressive,
which means that all lines of the pictures were scanned sequentially in one frame, as depicted in
Figure 1.4 (numbered here for a 625-line system).
12345
575574573572571
One frame of 625
lines
(575 visible)
Frame retrace
(50 lines)
336
337
338
623
622
621
Two fields of
312,5 lines each
(2×287,5 visible)
First field retrace
(25 lines)
23
24
25
310
309
308
Second field retrace
(25 lines)
Fig. 1.4. Representation of progressive scanning
(625 lines)
Fig. 1.5. Representation of interlaced scanning (625
lines)
These definitions, used for the first "regular" broadcasts, were the practical limit for the Nipkow
disk used for picture analysis; the CRT started to be used for display at the receiver side. In order to
avoid disturbances due to electromagnetic radiation from transformers or a ripple in the power supply,
the picture rate (or frame rate) was derived from the mains frequency. This resulted in refresh rates
of 25 pictures per second in Europe and 30 pictures per second in US. The bandwidth required was
of the order of 1 MHz, which implied the use of VHF frequencies (in the order of 40-50 MHz) for
transmission.
Given the presence of the scan lines/raster and the series of 25 distinct pictures every second it
is perhaps surprising that the flickering of the apparently moving picture isn't painfully obvious. The
illusion of a steady moving picture appears for two reasons. Firstly, the human eye/brain has a
property called persistence of vision. The eye takes a finite time to notice sudden changes in
brightness. The brain has had millions of years of evolution to teach it that physical objects don't keep
vanishing and reappearing 25 times a second. Secondly, the phosphors use in TV’s keeps fluorescing
for a short time after they're hit with electrons. This means they tend to maintain a reasonable
brightness over one or two frame periods. Taken together, these effects help to make flicker go
unnoticed. Despite this, refresh rate of 25 pictures per second wasn't really good enough to give a
completely flicker-free illusion. It was too low.
During the period 1935-1941, electronic television was perfected especially with the invention
of the iconoscope. Several countries began broadcasting, most experimentally, with limited numbers
of TV sets in the hands of the public.

21
Television broadcasting in the United Kingdom started with Baird’s system in 1932. The British
Broadcasting Corporation (BBC) television service started in 1936 with an on-air “bake-off” between
an improved Baird 240-line mechanical system and a 405-line all-electronic system developed by the
EMI and Marconi companies. In 1937, the 405-line monochrome system, known then as “high
definition,” was selected as the UK standard. Development also occurred in several other European
countries, with a variety of TV systems used for transmissions. The definitions in use attained 405
lines (England) to 441 lines (the United States, Germany) or 455 lines (France) using interlaced
scanning. This method, invented in 1927, consisted of scanning a first field made of the odd lines of
the frame and then a second field made of the even lines (see Figure 1.5), allowing the picture refresh
rate for a given vertical resolution to be doubled (50 or 60 Hz instead of 25 or 30 Hz) without
increasing the bandwidth required for broadcasting.
Regardless the different number of lines in operation all systems shared the common futures:
The picture rate have to be linked with mains frequency;
An interlaced scanning was used;
The same composite signal combining video, blanking and synchronization information was
used (see Figure 1.6).
Total line duration
Visible part
White
level
Black
level
Synchronization
level
Horizontal
synchronization
Horizontal
suppression
Fig. 1.6. Illustration of a composite monochrome video signal
Soon afterward, due to the increase in the size of the picture tube, and taking into account the
eye's resolution in normal viewing conditions, the spatial resolution of these systems still appeared
insufficient, and most experts proposed a vertical definition of between 500 and 700 lines. The
following characteristics were finally chosen in 1941 for the US monochrome system, which later
became NTSC when it was upgraded to color in 1952:
525 lines, interlaced scanning (two fields of 262,5 lines);
field frequency, 60 Hz (changed to 59,94 Hz upon the introduction of color in order to
minimize the visual effect of beat frequency between sound (4,5 MHz) and color
(3,58 MHz) subcarriers);
line frequency, 15,750 kHz (60×262,5); later changed to 15,734 kHz with development
of color TV (59,94×262,5);
video bandwidth 4,2 MHz;
negative video modulation;
FM sound with carrier 4,5 MHz above the picture carrier.
After World War II most European countries (except France and Great Britain) adopted the
German GERBER standard. It was similar to US system. 60 Hz field frequency was changed to 50 Hz
field frequency keeping a line frequency as near as possible to 15,750 kHz. This allowed some

22
advantage to be taken of the American experience with receiver technology. This choice implied an
increased number of lines (approximately in the ratio 60/50) and, consequently, a wider bandwidth
in order to obtain well-balanced horizontal and vertical resolutions. The following characteristics
were defined:
625 lines, interlaced scanning (two fields of 312,5 lines);
field frequency, 50 Hz;
line frequency, 15,625 kHz (50×312,5);
video bandwidth, 5,0 MHz;
negative video modulation;
FM sound carrier 5,5 MHz above the picture carrier.
The standard aspect ratio (width/height) of a standard TV picture was 4:3. Since 625 lines are
transmitted every 25th of a second each line scan must take 64 microseconds. To obtain the same
picture resolution in the vertical and horizontal directions it must be possible to distinguish the
brightness of (4/3)×625=833 distinct pixels (or pels=picture elements) along each line. The highest
signal frequencies will therefore be required if the pixels along the line will alternate, light-dark-light-
dark-light-.... Each light-dark alternation is essentially one cycle of the signal, so the highest signal
frequency required to get this horizontal resolution is 833/2 cycles in 64 microseconds, i.e. 6,5 MHz.
Therefore a 6,5 MHz video bandwidth for the picture signal is needed to get the same detail resolution
in the vertical and horizontal directions.
In practice, TV systems only allocates a video signal bandwidth of 5,5 MHz and less This means
that the level of detail horizontally is slightly less than vertically, but this usually goes unnoticed. In
practice the video signal doesn't just contain the line-by-line brightness signal as described above. It
also contains some extra patterns which are designed to help the TV receiver synchronize its display
correctly with the transmitted pattern. To do this a synch level pattern has to be included into the
video signal (see Figure 1.6).
To save on band space, TV uses a Vestigial Sideband system. This is similar to AM, but one of
the sidebands (the lower one) is filtered down to avoid duplicating all the picture information on both
sides of the carrier. This allows us to fit the entire TV signal into an 8 MHz transmission bandwidth
whilst maintaining a 5,5 MHz or less video luminance information bandwidth.
This has formed the basis of all the European color standards defined later (PAL, SECAM, D2-
MAC, PALplus). Although for many years France used a system with 819 lines.
Louis Parker invented the modern changeable television receiver in 1948. Marvin Middlemark
invented "rabbit ears", the "V" shaped TV antennae.
1.3. Development of Color Television
Color TV was by no means a new idea; a German patent in 1904 contained the earliest proposal,
while in 1925 Zworykin filed a patent disclosure for an all-electronic color television system. A
successful color television system began commercial broadcasting in US, first authorized by the
Federal Communications Commission (FCC) on December 17, 1953 based on a system invented by
Radio Corporation of America (RCA).
Following on from earlier research, during the 1940s various color television systems were
proposed and demonstrated in the United States. The first all-electronic color television system,
backward compatible with the existing monochrome television system, was developed in the early
1950s and submitted by the second National Television System Committee to the FCC in 1953 [4].
The FCC approved the NTSC color TV standard on 17 December 1953 [5]. This standard was
subsequently adopted by Canada, Mexico, Japan, and many other countries.
The countries of Europe delayed the adoption of a color television system, and in the years
between 1953 and 1967, a number of alternative systems, compatible with the 625-line, 50-field
existing monochrome systems, were devised [6]. This delay had features intended to improve on

23
NTSC, particularly to eliminate hue errors caused by phase errors of the color subcarrier in the
transmission path.
An early system that received approval was one proposed by Henri de France of the Compagnie
de Television of Paris. He suggested that the two pieces of coloring information (hue and saturation)
could be transmitted as subcarrier modulation that is sequentially transmitted on alternate lines. Such
an approach, designated as SECAM (SEquential Couleur Avec Memoire – for sequential color with
memory) was developed and officially adopted by France and the USSR, and broadcast service began
in France in 1967.
The implementation technique of a one-line delay element for SECAM led to the development,
largely through the efforts of Walter Bruch of the Telefunken Company, of the phase alternation line
(PAL) system. The line-by-line alternation of the phase of one of the color signal components
averages any colorimetric distortions to give the correct value. The PAL system was adopted by
numerous countries in continental Europe, as well as in the United Kingdom, and other countries
around the world. Public broadcasting began in 1967 in Germany and the United Kingdom using two
slightly different variants.
On the way to the color television inventors confronted with some problems:
They have to ensure the bi-directional compatibility with the existing monochrome
standard. It means a monochrome receiver was able to display the new color broadcasts
in black and white, and color receiver could display the existing black and white
broadcasts;
The triple red/green/blue (RGB) signals delivered by the TV camera had to be
transformed into a signal which, on the one hand, could be displayable without major
artifacts on current black and white receivers, and on the other hand could be transmitted
in the bandwidth of an existing TV channel.
The basic idea was to transform, by a linear combination, the three (R, G, B) signals into three
other equivalent components, Y, Cb, Cr (or Y, U, V):
Y=0,587G+0,299R+0,1145B
is called the luminance signal,
Cb=0,564(B-Y) or U=0,493(B-Y)
is called the blue chrominance or color difference,
Cr=0,713(R-Y) or V=0,877(R-Y)
is called the red chrominance or color difference.
The combination used for the luminance (or "luma") signal has been chosen to be as similar as
possible to the output signal of a monochrome camera, which allows the black and white receiver to
treat it as a normal monochrome signal. The two chrominance (or "chroma") signals represent the
"coloration" of the monochrome picture carried by the Y signal, and allow, by linear recombination
with Y, the retrieval of the original RGB signals in the color receiver.
Studies on visual perception have shown that the human eye's resolution is less acute for color
than for luminance transients. This means, for natural pictures at least, that chrominance signals can
tolerate a strongly reduced bandwidth (one-half to one-quarter of the luminance bandwidth), which
will prove very useful for putting the chrominance signals within the existing video spectrum. The Y,
Cb, Cr combination is the common point to all color TV systems, including the newest digital
standards.
In order to be able to transport these three signals in an existing TV channel (6 MHz in the
United States, 7 or 8 MHz in Europe), a subcarrier was added within the video spectrum, modulated
by the reduced bandwidth chrominance signals, thus giving a new composite signal called the Color
Video Baseband Signal - CVBS (see Figure 1.7).
In order not to disturb the luminance and the black and white receivers, this carrier had to be
placed in the highest part of the video spectrum and had to stay within the limits of the existing video
bandwidth (4,2 MHz in the United States, 5-6 MHz in Europe, see Figure 1.8).

24
64µs
52µs12µs4,7µs
Burst
White
level1,0 V
0 V
0,3 VBlack
level
Synchronization
level
Synchro
Suppression
AmplitudeSubcarrier
chrominance
Sound
carrier
Chrominance
0 2 3 4 5 5,54,43 f, MHz
Fig. 1.7. Illustration of a composite color video
signal PAL or NTSC
Fig. 1.8. Frequency spectrum of the PAL signal
The differences between the three world standards NTSC, PAL and SECAM mainly concern
the method of color subcarrier modulation and its frequency.
1.4. NTSC
This system uses with the line frequency locked subcarrier at 3,579545 MHz (=455×Fh/2),
amplitude modulated with a suppressed carrier following two orthogonal axes (quadrature amplitude
modulation, or QAM), by two signals, I (in phase) and Q (quadrature), carrying the chrominance
information. (Here Fh=15,734 kHz – line frequency). These signals are two linear combinations of
(R-Y) and (B-Y), corresponding to a 33° rotation of the vectors relative to the (B-Y) axis. This process
gives a vector (see Figure 1.9), the phase of which represents the tint and the amplitude of which
represents color intensity (saturation).
A reference burst at 3,579545 MHz with a 180° phase relative to the (B-Y) axis superimposed
on the back porch allows the receiver to rebuild the subcarrier required to demodulate I and Q signals.
The choice for the subcarrier of an odd multiple of half the line frequency is such that the luminance
spectrum (made up of discrete stripes centered on multiples of the line frequency) and the
chrominance spectrum (discrete stripes centered on odd multiples of half the line frequency) are
interlaced, making an almost perfect separation theoretically possible by the use of comb filters in the
receiver.
Practice, however, soon showed that NTSC was very sensitive to phase rotations introduced by
the transmission channel, which resulted in very important tint errors, especially in the region of flesh
tones. This led to the necessity of a tint correction button accessible to the user on the receivers and
Europeans to look for solutions to this problem, which resulted in the SECAM and PAL systems.

25
+(B-Y)
+(R-Y)
Q (φ=33o)
I (φ=123o)
IMQM
α =Tint
Magenta
Sat
urat
ion
Red
Yellow
Green
Cyan
Blue
Burst
(φ=180o)
Fig. 1.9. Color plan of the NTSC system
1.5. SECAM This standard eliminates the main drawback of the NTSC system by using frequency
modulation for the subcarrier, which is insensitive to phase rotations; however, FM does not allow
simultaneous modulation of the subcarrier by two signals, as does QAM.
The clever means of circumventing this problem consisted of considering that the color
information of two consecutive lines was sufficiently similar to be considered identical. This reduces
chroma resolution by a factor of 2 in the vertical direction, making it more consistent with the
horizontal resolution resulting from bandwidth reduction of the chroma signals. Therefore, it is
possible to transmit alternately one chrominance component, D′b=1,5(B-Y), on one line and the other,
D′r=-1,9(R-Y), on the next line. It is then up to the receiver to recover the two D′b and D′r signals
simultaneously, which can be done by means of a 64 µs delay line (one line duration) and a
permutation circuit. Subcarrier frequencies chosen are 4,250 MHz (=272×Fh) for the line carrying
D′b and 4,406250 MHz (=282×Fh) for D′r.
This system is very robust, and gives a very accurate tint reproduction, but it has some
drawbacks due to the frequency modulation - the subcarrier is always present, even in non-colored
parts of the pictures, making it more visible than in NTSC or PAL on black and white, and the
continuous nature of the FM spectrum does not allow an efficient comb filtering; rendition of sharp
transients between highly saturated colors is not optimum due to the necessary truncation of
maximum FM deviation. In addition, direct mixing of two or more SECAM signals is not possible.
1.6. PAL This is a close relative of the NTSC system, whose main drawback it corrects. It uses a line-
locked subcarrier at 4,433619 MHz (=1135/4+1/625×Fh), which is QAM modulated by the two color
difference signals U=0,493(B-Y) and V=0,877(R-Y). In order to avoid drawbacks due to phase
rotations, the phase of the V carrier is inverted every second line, which allows cancellation of phase
rotations in the receiver by adding the V signal from two consecutive lines by means of a 64 µs delay
line (using the same assumption as in SECAM, that two consecutive lines can be considered
identical). In order to synchronize the V demodulator, the phase of the reference burst is alternated
from line to line between +135° and –135° compared to the U vector (0°). Other features of PAL are
very similar to NTSC.
On the evolutionary path to fully digital TV systems, there were several projects to enhance and
improve analog television using advanced analog and hybrid analog – digital technologies. Some of
the projects worth mentioning are the Japan Broadcasting Corporation (NHK) HDTV [7] project in
Japan, the Eureka EU 95 Project [8] and PALplus [9] in Europe, and Advanced Compatible

26
Television in the United States [10]. They provided valuable experience for future Digital TV (DTV)
systems development.
1.7. MAC (multiplexed analog components) During the 1980s, Europeans attempted to define a common standard for satellite broadcasts,
with the goal of improving picture and sound quality by eliminating drawbacks of composite systems
(cross-color, cross-luminance, reduced bandwidth) and by using digital sound. This resulted in the
MAC systems, with a compatible L- extension toward HDTV (called HD-MAC).
D2-MAC is the most well-known of these hybrid systems, even if it did not achieve its expected
success due to its late introduction and an earlier development of digital TV than anticipated. It
replaces frequency division multiplexing of luminance, chrominance, and sound (bandwidth sharing)
of composite standards by a time division multiplexing (time sharing). It is designed to be compatible
with normal (4:3) and wide-screen (16:9) formats and can be considered in some aspects an
intermediate step on the route to all-digital TV signal transmission.
1.8. PALplus The primary objective of this development was to allow terrestrial transmission of improved
definition 16:9 pictures (on appropriate receivers) in a compatible way with existing 4/3 PAL
receivers. To do this, the PALplus encoder transforms the 576 useful lines of a 16:9 picture into a 4:3
picture in letterbox format (a format often used for the transmission of films on TV, with two
horizontal black stripes above and below the picture). The visible part occupies only 432 lines
(576×3/4) on a 4/3 receiver, and additional information for the PALplus receiver is encoded in the
remaining 144 lines.
The 432-line letterbox picture is obtained by vertical low-pass filtering of the original 576 lines,
and the complementary high-pass filtering is transmitted on the 4,43 MHz subcarrier during the 144
black lines, which permits the PALplus receiver to reconstruct a full-screen 16/9 high resolution
picture.
In order to obtain the maximum bandwidth for luminance (5 MHz) and to reduce cross-color
and cross-luminance, the phase of the subcarrier of the two interlaced lines of consecutive fields is
reversed. This process, known as "colorplus," allows (by means of a frame memory in the receiver)
cancellation of cross-luminance by adding the high part of the spectrum of two consecutive frames,
and reduction of cross-color by subtracting them.
A movement compensation is required to avoid artifacts introduced by the colorplus process on
fast moving objects, which, added to the need for a frame memory, contributes to the relatively high
cost of PALplus receivers. The PALplus system results in a subjective quality equivalent to D2-MAC
on a wide-screen (16:9) receiver in good reception conditions (high signal/noise ratio).
1.9. Development of Digital Television
Development of high definition and advanced television systems preceded in parallel in the
United States, Europe, and Japan. For various technical, organizational, and political reasons, this has
resulted in multiple sets of DTV standards. Currently, there are three main DTV standard groups:
1. The Advanced Television Systems Committee (ATSC), a North America based DTV
standards organization, which developed the ATSC terrestrial DTV series of standards. In
addition, the North American digital cable TV standards now in use were developed
separately, based on work done by Cable Television Laboratories (CableLabs) and largely
codified by the Society of Cable Telecommunications Engineers (SCTE).
2. The Digital Video Broadcasting (DVB) Project, a European based standards organization,
which developed the DVB series of DTV standards, standardized by the European
Telecommunication Standard Institute (ETSI).

27
3. The ISDB standards, a series of DTV standards developed and standardized by the
Association of Radio Industries and Business (ARIB) and by the Japan Cable Television
Engineering Association (JCTEA).
China has developed another terrestrial DTV standard called Digital Terrestrial Multimedia
Broadcasting (DTMB). The DTMB standard has been adopted in the People's Republic of China,
including Hong Kong and Macau.
The DVB Project is the focal point of the development of DTV for many countries around the
world [11]. The start of DVB in 1993 is a direct consequence of the experience that a number of
European partners had gained in the PALplus project in the late 1980s and the early 1990s.
At the time of the first activities on DVB in Europe, the Moving Pictures Experts Group
(MPEG) was already working on a set of specifications for the source coding of video and audio
signals and had already started the design of the respective systems level (MPEG-2). The proposed
system known as MPEG Audio for the source coding of audio signals, in mono and stereo, was
already in the final phase of standardization. The DVB Project decided that in order for the
technological solution used by the DVB Project DTV should be based on the MPEG standard.
The first complete system specification was the recommendation for satellite transmission
(DVB-S) adopted in November 1993 [11]. Some later it became the European Telecommunications
Standard ETS 300 421. In January 1994, the specification for DVB distribution via cable (DVB-C –
ETS 300 429) followed and since then numerous other specifications like DVB-T and DVB-H have
been developed and adopted.
For many years, the DVB Project developed specifications addressing the technology of
broadcast networks in order to transport digitized audio and video to TV receivers, set-top boxes, and
high-fidelity audio receivers. Later, specifications for interactive channels were added. The
appearance of the multimedia home platform (MHP) indicated another significant event, since with
MHP software applications can be run on all sorts of terminal devices. Among other things, MHP can
be embedded in non-DVB digital broadcasting environments, like US cable (OCAP), US terrestrial
(ACAP) and Japanese terrestrial DTV. Another significant new area for DVB is the development of
specifications for the transport of “DVB content” over telecommunications networks (both fixed and
mobile).
DVB systems distribute data using a variety of approaches, including:
Satellite: DVB-S, DVB-S2 and DVB-SH DVB-SMATV for distribution via SMATV
Cable: DVB-C, DVB-C2
Terrestrial television: DVB-T, DVB-T2 Digital terrestrial television for handhelds: DVB-H,
DVB-SH
Microwave: using DTT (DVB-MT), the MMDS (DVB-MC), and/or MVDS standards
(DVB-MS)
Besides digital audio and digital video transmission, DVB also defines data connections (DVB-
DATA - EN 301 192) with return channels (DVB-RC) for several media (DECT, GSM, PSTN/ISDN,
satellite etc.) and protocols (DVB-IPTV: Internet Protocol; DVB-NPI: network protocol
independent).
The conditional access system (DVB-CA) defines a Common Scrambling Algorithm (DVB-
CSA) and a physical Common Interface (DVB-CI) for accessing scrambled content. DVB-CA
providers develop their wholly proprietary conditional access systems with reference to these
specifications. Multiple simultaneous CA systems can be assigned to a scrambled DVB program
stream providing operational and commercial flexibility for the service provider.
DVB is also developing a Content Protection and Copy Management system for protecting
content after it has been received (DVB-CPCM), which is intended to allow flexible use of recorded
content on a home network or beyond, while preventing unconstrained sharing on the Internet.

28
Older technologies such as teletext (DVB-TXT) and vertical blanking interval data (DVB-VBI)
are also supported by the standards to ease conversion. However, for many applications more
advanced alternatives like DVB-SUB for subtitling are available.
The DVB Project is still extremely active in developing new solutions for the ever changing
world of the electronic media.

29
HUMAN EYE STRUCTURE, COLOR VISION and COLOR MODELS
2.1. Parts of the Human Eye
The eye is a slightly asymmetrical globe, about 2,5 cm in diameter. Simplified structure of the
eye is depicted in Figure 2.1. The front part of the eye (the part we see in the mirror) includes [12]:
• Iris is pigmented (colored) membrane of the eye. The iris is located between the cornea
and the lens. Its color varies from pale blue to dark brown. Multiple genes inherited from
each parent determine a person’s eye color. It consists of an inner ring of circular muscle
and an outer layer of radial muscle. Its function is to help control the amount of light
entering the eye so that:
too much light does not enter the eye which would damage the retina,
enough light enters to allow a person to see;
• Cornea is transparent "front window" of the eye. It is a thick, nearly circular structure
covering the lens and the iris. The cornea is an important part of the focusing system of
the eye;
• Pupil is round black hole in the center of the iris. The size of the pupil changes
automatically to control the amount of light entering the eye;
• Sclera is an opaque, fibrous, protective outer structure. Part of the white sclera can be seen
in the front of the eye. It is soft connective tissue, and the spherical shape of the eye is
maintained by the pressure of the liquid inside. It provides attachment surfaces for eye
muscles;
• Conjunctiva is a thin layer of tissue covering the front of the eye, except the cornea. It is
a thin protective covering of epithelial cells. It protects the cornea against damage by
friction. Tears from the tear glands help this process by lubricating the surface of the
conjunctiva.
Macula
RetinaLens
Iris
Pupil
CorneaOptic
Nerve
Sclera Fovea
Fig. 2.1. Simplified structure of the human eye
Other parts of the eye:
• Lens is a transparent biconvex structure located behind the iris. It focuses light rays
entering through the pupil in order to form an image on the retina;
• Retina is a thin multi-layered membrane which lines the inside back two-thirds of the eye.
It is composed of millions of visual cells and it is connected by the optic nerve to the brain.
The retina receives light and sends electrical impulses to the brain that result in sight. The
light sensitive retina consists of four major layers: the outer neural layer, containing nerve
cells and blood vessels; the photoreceptor layer, a single layer that contains the light
sensing rods and cones; the retinal pigment epithelium (RPE) and the choroid, consisting
of connective tissue and capillaries;

30
• Macula is an area of the eye near the center of the retina where visual perception is most
acute. Macula contains the fovea, a small depression or pit at the center of the macula that
gives the clearest vision. The macula is responsible for the sharp, straight-ahead vision that
is used for seeing fine detail, reading, driving, and recognizing faces. It is one hundred
times more sensitive to detail than the peripheral retina.
• Fovea is the area on the retina where we have the best spatial and color vision. When we
look at, or fixate, an object in our visual field, we move our head and eyes such that the
image of the object falls on the fovea. The fovea covers an area that subtends about two
degrees of visual angle in the central field of vision.
• Optic nerve is cable-like structure composed of thousands of nerve fibers that connect the
macula and retina with the brain. The optic nerve carries electrical impulses from the
macula and retina to the processing center of the brain where they are interpreted into clear,
colorful sight.
In a number of ways, the human eye works much like a digital TV camera:
• Light is focused primarily by the cornea – the clear front surface of the eye, which acts like
a camera lens;
• The iris of the eye functions like the diaphragm of a camera, controlling the amount of light
reaching the back of the eye by automatically adjusting the size of the pupil (aperture);
• The eye's crystalline lens is located directly behind the pupil and further focuses light.
Through a process called accommodation, this lens helps the eye automatically focus on
near and approaching objects, like an autofocus camera lens;
• Light focused by the cornea and crystalline lens (and limited by the iris and pupil) then
reaches the retina – the light-sensitive inner lining of the back of the eye. The retina acts
like an electronic image sensor of a digital camera, converting optical images into
electronic signals. The optic nerve then transmits these signals to the visual cortex – the
part of the brain that controls our sense of sight.
Other parts of the human eye play a supporting role in the main activity of sight:
• Some carry fluids (such as tears and blood) to lubricate or nourish the eye;
• Others are muscles that allow the eye to move;
• Some parts protect the eye from injury (such as the lids and the epithelium of the cornea);
• And some are messengers, sending sensory information to the brain (such as the pain-
sensing nerves in the cornea and the optic nerve behind the retina).
2.2. Color Vision
The eye is often compared to a digital TV camera that is self-focusing, has a self-cleaning lens
and has its images processed by a computer with millions of CPUs [12]. When our eye sees, light
from the outside world is focused by the lens onto the retina simplified structure of which is presented
in the Figure 2.2.

31
RodsCones
Horizontal cells
Bipolar cellsAmacrine cells
Retinal ganglion cells
Nerve fiber layer
Light
Fig. 2.2. Simplified structure of retina
There, it is absorbed by pigments in light-sensitive cells, called rods and cones. Higher primates,
including humans, have three different types of cones. Many animals have two different types, but
some, like birds, have five and more
There are approximately 6 million cones in our retina, and they are sensitive to a wide range of
brightness [12, 13]. The three different types of cones, namely: S-cones, M-cones and L-cones, are
sensitive to short, medium and long wavelengths, respectively, shown in the Figure 2.3 below (plotted
with individual normalizations). The graph in the Figure 2.3 shows the sensitivity of the different
cones to varying wavelengths. The graph shows how the response varies by wavelength for each kind
of receptor. For example, the medium cone is more sensitive to pure green wavelengths than to red
wavelengths.
400 450 500 550 600 650 7000
0,2
0,4
0,6
0,8
1,0
Wavelength, nm
Rel
ativ
e sp
ectr
al a
bso
rban
ce
S
R
M L
Fig. 2.3. The sensitivity of the different cones (S, M, L) and rods (R) to varying wavelengths
The peak sensitivities are provided by three different photo-pigments. Light at any wavelength
in the visual spectrum (ranging from 400 to 700 nm) will excite one or more of these three types of
sensors. Our mind determines the color by comparing the different signals each cone senses [12, 13].
Our ability to perceive color depends upon comparisons of the outputs of the three cone types, each
with different spectral sensitivity.
The color yellow, for example, is perceived when the L cones are stimulated slightly more than
the M cones, and the color red is perceived when the L cones are stimulated significantly more than
the M cones. Similarly, blue and violet hues are perceived when the S receptor is stimulated more
than the other two.
Additionally, we have approximately 125 million rods on the retina, which are used only in dim
light, and are monochromatic – black and white. Rod cells function as specialized neurons that
convert visual stimuli into chemical and electrical stimuli that can be processed by the central nervous
system. Rod cells are stimulated by light over a wide range of intensities and are responsible for
perceiving the size, shape, and brightness of visual images. They do not perceive color and fine

32
details; tasks performed by the other major type of light-sensitive cell, the cone. Rod cells are much
more sensitive (about 100 times) to light than cones and are also much more numerous. Rods are
most sensitive to wavelengths of light around 498 nm (blue-green), and insensitive to wavelengths
longer than about 640 nm (red). (See the dashed black curve in Figure 2.3). This fact means that as
intensity dims at twilight, the rods take over, and before color disappears completely, peak sensitivity
of vision shifts towards the rods' peak sensitivity (blue-green).
The rods and cones line the back of the retina. In front of them are three types of nerve cells:
bipolar cells, horizontal cells and amacrine cells [12, 13]. Bipolar cells receive input from the cones,
and many feed into the retinal ganglion cells. Horizontal cells link cones and bipolar cells, and
amacrine cells, in turn, link bipolar cells and retinal ganglion cells. There are about 1 million ganglion
cells in the eye. The purpose of the ganglion cells is not fully known, but they are involved in color
vision. Ganglion cells compare signals from many different cones. The ganglion cells add and
subtract signals from many cones and perform other mathematical operation (multiply, divide) in
addition to the amplification, gain control, and nonlinearities that can occur within the neural cells.
Thus the network of cells within the retina can serve as a sophisticated image computer. This is how
the information from 130 million photoreceptors can be reduced to signals in approximately one
million ganglion cells without loss of visually meaningful data. For example, by comparing the
response of the middle-wavelength and long-wavelength cones, a ganglion cell determines the
amount of green-or-red. Moreover, they are excited in the middle of the field, and inhibited in the
surrounding field, which makes them particularly sensitive to edges.
The result of these steps for color vision is a signal that is sent to the brain. There are three
signals, corresponding to the three color attributes. These are:
• the amount of green-or-red;
• the amount of blue-or-yellow;
• the brightness.
Another important feature about the three cone types is their relative distribution in the retina.
It turns out that the S cones are relatively sparsely populated throughout the retina and completely
absent in the most central area of the fovea. There are far more L and M cones than S cones and there
are approximately twice as many L cones as M cones. The relative populations of the L:M:S cones
are approximately 12:6:1 (with reasonable estimates as high as 40:20:1). These relative populations
must be considered when combining the cone responses (see curves in Figure 2.3) to predict higher
level visual responses.
The humans perceive color just as they perceive taste. When they eat, their taste buds sense
four attributes: sweet, salty, sour and bitter. Similarly, when the humans look at a scene, their visual
nerves register color in terms of the attributes of color: the amount of green-or-red; the amount of
blue-or-yellow; and the brightness.
Note that these attributes are opposites, like hot and cold. Color nerves sense green or red – but
never both; and blue or yellow – but never both. Thus, the humans never see bluish-yellows or
reddish-greens. The opposition of these colors forms the basis of color vision.
A lot of researches have led to the development of the modern opponent theory of color vision
(sometimes called a stage theory) as illustrated in Figure 2.4. Figure 2.4 illustrates that the first stage
of color vision, the receptors, is trichromatic [12]. However the three ‘color-separation’ images are
not transmitted directly to the brain. Instead the neurons of the retina (and perhaps higher levels)
encode the color into opponent signals. The outputs of all three cone types are summed (L+M+S) to
produce an achromatic response. The summation is taken in proportion to the relative populations of
the three cone types. Differencing of the cone signals allows construction of red-green (L−M+S) and
yellow-blue (L+M−S) opponent signals. The transformation from LMS signals to the opponent signals
serves for decorrelation the color information carried in the three channels, thus allowing more
efficient signal transmission and reducing difficulties with noise. The three opponent pathways also
have distinct spatial and temporal characteristics that are important for predicting color appearance.

33
The importance of the transformation from trichromatic to opponent signals for color appearance is
reflected in the prominent place that it finds within the formulation of all color appearance models.
Figure 2.4 includes not only a schematic diagram of the neural ‘wiring’ that produces opponent
responses, but also the relative spectral responsibility of these mechanisms both before and after
opponent encoding.
Retinal ganglion cells vary significantly in terms of their size, connections, and responses to
visual stimulation but they all share the defining property of having a long nerve fiber that extends
into the brain and typically conduct electrical impulses away from the neuron's cell body. These nerve
fibers form the optic nerve. A small percentage of retinal ganglion cells contribute little or nothing to
vision, but are photosensitive; their nerve fibers participate in the pupil resizing process.
L M S
A R-G Y-B
-
-
-
-
Channel response
avelength, nm
400 500 600 700
0
0,2
0,4
0,6
0,8
1,0
Rel
ativ
e sp
ectr
al
abso
rban
ce
Wavelength, nm
S
R
M L
Fig. 2.4. Illustration of the encoding of cone signals into opponent color’s signals in the human visual system; A –
achromatic (brightness – luminance), R-G – red - green, Y-B – yellow - blue

34
2.3. Development of Color Models
The search for a understanding of exactly what color is and how it functions has been going on
for hundreds of years. A color model is an orderly system for creating a whole range of colors from
a small set of primary colors. Numerous models and systems have been developed.
The first known studies of color were done in ancient Greece by Aristotle. According to him
color exists in the form of rays sent down from the heavens by God [14].
More sophisticated color systems were developed by Aguilonius and Sigfrid Forsius in the
Renaissance time. Aguilonius was the first who attempted to define all colors on the basis of his own
observations of the changing color of the sky from dawn to dusk [14].
In 1660, Sir Issac Newton developed a more logical color order based on his scientific
observation from experiments using a prism [14, 22]. Newton demonstrated that white light could be
broken down into the colors of the rainbow (red, orange, yellow, green, blue, indigo and violet). He
discovered also that when the light from three separate parts of his rainbow, the red, green, and blue
regions, were recombined they would regenerate white light. He called these the primary colors.
When any two of these were combined, secondary colors were formed. When he combined blue and
green light, he observed light the color of cyan. Green and red light mixed to give yellow light. In
both of these cases, Newton apparently regenerated light in another portion of the natural spectrum.
But when he combined red and blue light from his prisms, Newton observed a colored light, magenta,
that was not found in the natural visible spectrum. Newton organized his findings in a color wheel
presented in Figure 2.5 and showing the three „primary colors“ – red, green, and blue – separated by
the three „secondary colors“ – yellow, cyan, and magenta.
Magenta
Cyan
RED
GREEN
BLUEYellow
IA
ICIB
IIB
IIIB
IIAIIIA
IIIC
IIC
0,0 0,1 0,3 0,40,2 0,5 0,6 0,7 0,8
x
y
0,1
0,2
0,3
0,9
0,4
0,5
0,6
0,7
0,8
G
R
B
Fig. 2.5. Newton‘s color wheel Fig. 2.6. Goethe‘s color triangle Fig. 2.7. The CIE 1931 xy chromaticity
space
The next big jump in color theory did not come until the early 1800's, when Johanes Wolfgang
Goethe challenged Newton's ideas and created his own color system [14, 22]. Newton's and Geothe's
approaches were very different. Newton's studies in color were scientifically based, while Goethe's
interest was more in the psycological effects of color. He wished to investigate whether rules could
be found to govern the artistic use of color. Originally he planned on creating an improved color
wheel, but later Goethe found his ideas were best expressed within an equilateral triangle presented
in Figure 2.6. In Goethe's original triangle the three primaries red, yellow, and blue are arranged at
the vertices of the triangle. The other subdivisions of the triangle are grouped into secondary and
tertiary triangles, where the secondary triangle colors represent the mix of the two primary triangles
to either side of it, and the tertiary triangle colors represent the mix of the primary triangle adjacent
to it and the secondary triangle directly across from it.
Also around this time Phillip Otto Runge developed the first three dimensional color model in
the form of a sphere [14, 22]. His theory was revolutionary at that time, and it attempted to arrange
colors based on hue (red, cyan, orange, etc.), whiteness, and blackness.
In 1872 a Scottish physicist, Sir James Clerk Maxwell, developed a chart in the form of an
equilateral triangle from his studies of the electromagnetic theory of light [23]. His triangle is very

35
similar to Goethe's, both are equilateral and both choose three primaries which are combined to
produce the inner colors. Maxwell, however, believed that he could produce all the known colors
within his triangle, and he choose red, green, and blue as primaries.
In 1802, Thomas Young, an English physician first demonstrated that he could generate any
colors that could be seen by mixing differing proportions of the three primary colors of light [24]. For
example, you could mix two parts of red light with one part of green light to get an orange color.
Using more green light than red light, you saw a yellow-green light. Young took his observations a
step further: he hypothesized that the human eye perceives only Newton's three primary colors, red,
green, and blue, and that the eye perceived all of the variations in color by combining these internally.
When the both red and blue light but no green light enters your eye, you "see" magenta even though
the light is not magenta. A combination of red and green, gives the perception of yellow while our
eyes turn blue and green light into cyan.
Young's work had the form of a hypothesis. It remained for the physiological psychologist
Hermann von Helmholtz a century later to postulate the existence of three types of color receptors,
called cones, in the human eye that are stimulated by broad regions of the visible spectrum. Red light
in one of these regions stimulated one type of cone, green light from the middle region could stimulate
a second type of cone, and blue light in the final region stimulated the remaining cone. The relative
degree of stimulation of these cones gives us perception of all of the colors that we see. We perceive
sunlight as "white" because radiate from each of the three of the parts of the visible spectrum (red,
green, and blue) stimulate the three cones in our eyes. If an object reflects red and green light but not
blue light, my eyes will see it as yellow. If a second object reflects just red and blue light, my eyes
will see it as magenta. Yet another object reflecting just blue and green light appears cyan colored.
In 1931, an attempt was made to establish a world standard for the measurement of color by the
Commission Internationale de l'Eclairage (CIE). They generated a version of Maxwell's triangle,
choosing a particular red, green, and blue from which to generate all the colors. The result became
known as the 1931 CIE Chromaticity Diagram (see [15]) presented in Figure 2.7, also showing the
chromaticities of black-body light sources of various temperatures, and lines of constant correlated
color temperature. The updated versions (1960 CIE uv Chromaticity Diagram, 1976 CIE u'v'
Chromaticity Diagram) of this chart is used to measure and quantify the light produced by computer
phospor guns today. The 1931 CIE xy system characterizes colors by a luminance parameter Y and
two color coordinates x and y which specify the point on the chromaticity diagram. This system offers
high precision in color measurement because the parameters are based on the spectral power
distribution (SPD) of the light emitted from a colored object and are factored by sensitivity curves
which have been measured for the human eye. Based on the fact that the human eye has three different
types of color sensitive cones, the response of the eye is best described in terms of three "tristimulus
values". However, once this is accomplished, it is found that any color can be expressed in terms of
the two color coordinates x and y. The colors which can be matched by combining a given set of three
primary colors (such as the blue, green,and red of a color television screen) are represented on the
chromaticity diagram by a triangle joining the coordinates for the three colors.
According to the current level of understanding of color science there are two types of color
models, those that are subtractive and those that are additive [16, 17]. Additive color models use light
to display color while subtractive models use printing inks. Colors perceived in additive models are
the result of transmitted light. Colors perceived in subtractive models are the result of reflected light.
With the advent of the computer age, many attempts have been made to create an ideal color
space model based on the red, green, and blue primaries of the computer screen. There are several
established color models used in computer graphics, but the two most common are the RGB model
(Red-Green-Blue) for computer display and the CMYK model (Cyan-Magenta-Yellow-Black) for
printing. The simplest model is the RGB cube, with corners of black, the three primaries (red, green,
blue), the three secondary mixes (cyan, magenta, yellow), and white.

36
Generally speaking the purpose of a color model is to facilitate the specification of colors in
some standard generally accepted way. In essence, a color model is a specification of a 3-D coordinate
system and a subspace within that system where each color is represented by a single point.
Each industry that uses color employs the most suitable color model. For example, the RGB
color model is used in computer graphics, YUV or YCbCr are used in video systems, PhotoYCC is
used in PhotoCD production and so on. Transferring color information from one industry to another
requires transformation from one set of values to another.
Each color model has its own range of colors that can be displayed or printed. Each color model
is limited to only a portion of the visible spectrum. Since a color model has a particular range of
available color, it is referred to as using a "color space". An image or vector graphic is said to use
either the RGB color space or the CMYK color space (or the color space of another color model).
Notice the centers of the two color charts bellow in Figure 2.8. In the RGB model, the
convergence of the three primary additive colors produces white. In the CMYK model, the
convergence of the three primary subtractive colors produces black. The overlapping of additive
colors (red, green and blue) in the RGB model results in subtractive colors (cyan, magenta and
yellow). The overlapping of subtractive colors (cyan, magenta and yellow) in the CMYK model
results in additive colors (red, green and blue).
The colors in the RGB model are much brighter than the colors in the CMYK model. It is
possible to attain a much larger percentage of the visible spectrum with the RGB model. That is
because the RGB model uses transmitted light while the CMYK model uses reflected light. The muted
appearance of the CMYK model demonstrates the limitation of printing inks and the nature of
reflected light. The colors in this chart appear muted because they are displayed within their printable
range of colors.
Since additive color models display color as a result of light being transmitted (added) the total
absence of light would be perceived as black. Subtractive color models display color as a result of
light being absorbed (subtracted) by the printing inks. As more ink is added, less light is reflected.
Where there is a total absence of ink the resulting light being reflected from a white surface would be
perceived as white.
Red Green
Magenta
Yellow
White
Cyan
Blue
a)
GreenCyan Yellow
Blue
Magenta
Red
Black
b)
Fig. 2.8. Primary and secondary colors for RGB and CMYK models; (a) – RGB chart, (b) – CMYK chart
2.4. RGB Color Model
The RGB color model is an additive color model. The color subspace of interest is a cube shown
in Figure 2.9 (RGB values are normalized to 0…1), in which RGB values are at three corners; cyan,
magenta, and yellow are the three other corners, black is at their origin; and white is at the corner
farthest from the origin. In this case red, green and blue light are added together in various
combinations to reproduce a wide spectrum of colors.
The main purpose of the RGB color model is for the sensing, representation, and display of
images in electronic systems, such as televisions and computers, though it has also been used in

37
conventional photography. Before the electronic age, the RGB color model already had a solid theory
behind it, based in human perception of colors.
RGB is a device-dependent color model: different devices detect or reproduce a given RGB
value differently, since the color elements (such as phosphors or dyes) and their response to the
individual R, G, and B levels vary from manufacturer to manufacturer, or even in the same device
over time. Thus an RGB value does not define the same color across devices without some kind of
color management.
Typical RGB input devices are color TV and video cameras, image scanners, and digital
cameras. Typical RGB output devices are TV sets of various technologies (CRT, LCD, plasma, etc.),
computer and mobile phone displays, video projectors, multicolor LED displays, and large screens
such as JumboTron. Color printers, on the other hand, are not RGB devices, but subtractive color
devices (typically CMYK color model).
In order to create a color with RGB, three colored light beams (one red, one green, and one
blue) must be superimposed. With no intensity,each of the three colors is perceived as black, while
full intensity leads to a perception of seeing white. Differing intensities produce the hue of a color,
while the difference between the most and least intense of the colors make the resulting color more
or less saturated.
The RGB model forms its range of colors from the primary additive colors of red, green and
blue. When red, green and blue light is combined it forms white. Computers generally display RGB
using 24-bit color. In the 24-bit RGB color model there are 256 variations for each of the additive
colors of red, green and blue. Therefore there are 16777216 possible colors (256 reds x 256 greens x
256 blues) in the 24-bit RGB color model. In the RGB color model, colors are represented by varying
intensities of red, green and blue light. The intensity of each of the red, green and blue components
are represented on a scale from 0 to 255 with 0 being the least intensity (no light emitted) to 255
(maximum intensity). For example in the above RGB chart the magenta color would be R=255, G=0,
B=255. Black would be R=0, G=0, B=0 (a total absence of light).
For web-page design the colors used are commonly specified using RGB. Today, with the
predominance of 24-bit displays, it enables most users to see 16,7 million colors of HTML RGB code.
In web page design, there are 216 so-called ‘web-safe’ RGB colors represented by hexidecimal
values. Quite simply, the web-safe color palette consists of the 216 combinations of red, green and
blue.
2.5. CMYK Color Model
The CMYK color model is a subset of the RGB model and is primarily used in color print
production [17]. CMYK is an acronym for cyan, magenta, and yellow along with black (noted as K).
The CMYK color space is subtractive, meaning that cyan, magenta yellow, and black pigments or
inks are applied to a white surface to subtract some color from white surface to create the final color.
For example, see Figure 2.8, cyan is white minus red, magenta is white minus green, and yellow is
white minus blue. Subtracting all colors by combining the CMY at full saturation should, in theory,
render black. However, impurities in the existing CMY inks make full and equal saturation
impossible, and some RGB light does filter through, rendering a muddy brown color. Therefore, the
black ink is added to CMY. The CMY cube is shown in Figure 2.9, in which CMY values are at three
corners: red, green, and blue are the three other corners, white is at the origin; and black is at the
corner farthest from the origin.
It is frequently suggested that the ‘K’ in CMYK comes from the last letter in ‘black’ and was
chosen because B already refers to blue. However, this explanation is incorrect. The ‘K’ in CMYK
stands for ‘key’ since in four-color printing cyan, magenta, and yellow printing plates are carefully
keyed or aligned with the key of the black key plate. Black is used because the combination of the

38
three primary colors (CMY) doesn’t produce a fully saturated black. This is evident in the central
black color created by the overlapping circles in the color chart above.
CMYK is able to produce the entire spectrum of visible colors due to the process of half-toning.
In this process, each color is assigned a saturation level and miniscule dots of each of the three colors
are printed in tiny patterns. This enables the human eye to perceive a specific color made from the
combination. In order to improve print quality and reduce moiré patterns, the screen for each color is
set at a different angle.
In the CMYK color model, colors are represented as percentages of cyan, magenta, yellow and
black. For example in the above CMYK chart (see Figure 2.8) the red color is composed of 14% cyan,
100% magenta, 99% yellow and 3% black. White would be 0% cyan, 0% magenta, 0% yellow and
0% black (a total absence of ink on white paper).
R
G
B
(1,0,0)
Red
Green
(0,1,0)
(0,0,1) BlueCyan
Magenta
White
Black
Yellow
Gray scale
a)
C
M
Y
(1,0,0)
Red
Green
(0,1,0)
(0,0,1)
Blue
Cyan
Magenta
White
Black
Yellow
Gray scale
b)
Fig. 2.9. RGB and CMY Color 3-D Models; (a) – RGB model, (b) – CMY model
2.6. Gamma Correction
The luminance intensity generated by most displays is not a linear function of the applied signal
but is proportional to some power (referred to as gamma) of the signal voltage [17]. As a result, high
intensity ranges are expanded and low intensity ranges are compressed. This nonlinearity must be
compensated to achieve correct color reproduction. To do this, luminance of each of the linear red,
green, and blue components is reduced to a nonlinear form using an inverse transformation. This
process is called "gamma correction".
Usually to convert an RGB image to a gamma-corrected R’G’B’ image the following basic
equations are used
' 4,5 ,
for , , 0,018 ' 4,5 ,
' 4,5 ,
R R
R G B G G
B B
0,45
0,45
0,45
' 1,099 0,099,
for , , 0,018 ' 1,099 0,099,
' 1,099 0,099.
R R
R G B G G
B B
The channel intensity values are normalized to fit in the range [0…1]. The gamma value is
equal to 1/0,45=2,22 in conformity with ITU-R Recommendation BT.709 specification [18].
2.7. YUV Color Model

39
The YUV color model is the basic color model used in analogue color TV broadcasting. Initially
YUV is the re-coding of RGB for transmission efficiency (minimizing bandwidth) and for downward
compatibility with black-and white television. The YUV color space is “derived” from the RGB
space. It comprises the luminance (Y) and two color difference (U, V) components. The luminance
can be computed as a weighted sum of red, green and blue components; the color difference, or
chrominance, components are formed by subtracting luminance from blue and from red.
The principal advantage of the YUV model in image processing is decoupling of luminance
and color information. The importance of this decoupling is that the luminance component of an
image can be processed without affecting its color component. For example, the histogram
equalization of the color image in the YUV format may be performed simply by applying histogram
equalization to its Y component.
There are many combinations of YUV values from nominal ranges that result in invalid RGB
values, because the possible RGB colors occupy only part of the YUV space limited by these ranges.
The Y’U’V’ notation means that the components are derived from gamma-corrected R’G’B’.
Weighted sum of these non-linear components forms a signal representative of luminance that is
called luma Y’. Luma is often loosely referred to as luminance, so you need to be careful to determine
whether a particular author assigns a linear or non-linear interpretation to the term luminance.
Conversion between gamma-corrected R’G’B’ and Y’U’V’ models is possible using the
following basic equation [19]
' 0,299 ' 0,587 ' 0,114 'Y R G B
' 0,147 ' 0,289 ' 0,436 ' 0,492( ' ')U R G B B Y
' 0,615 ' 0,515 ' 0,1 ' 0,877( ' ')V R G B R Y
' ' 1,140 'R Y V
' ' 0,394 ' 0,581 'G Y U V
' ' 2,032 'B Y U
2.8. YCbCr Color Model
The YCbCr color space is used for component digital video and was developed as part of the
ITU-R Recommendation BT.601 [20]. YCbCr is a scaled and offset version of the YUV color space.
The following basic equations [19] are used for conversion between R’G’B’ in the range 0–255 and
Y’Cb’Cr’ (this notation means that all components are derived from gamma-corrected R’G’B’):
' 0,257 ' 0,504 ' 0,098 ' 16Y R G B ,
' 0,148 ' 0,291 ' 0,439 ' 128Cb R G B ,
' 0,439 ' 0,368 ' 0,071 ' 128Cr R G B ,
' 1,164( ' 16) 1,596( ' 128)R Y Cr ,
' 1,164( ' 16) 0,813( ' 128) 0,392( ' 128)G Y Cr Cb ,
' 1,164( ' 16) 2,017( ' 128)B Y Cb .
2.9. YCoCg Color Model
The YCoCg color model was developed to increase the effectiveness of the image compression
[21]. This color model comprises the luminance (Y) and two color difference components (Co - offset
orange, Cg - offset green).
The basic equations [21] for conversion between RGB and YCoCg are:

40
/ 4 / 2 / 4Y R G B ,
/ 2 / 2Co R B ,
/ 4 / 2 / 4Cg R G B ,
R Y Co Cg ,
G Y Cg ,
B Y Co Cg .
The possible RGB colors occupy only part of the YUV, or YCbCr, or YCoCg color spaces
limited by the nominal ranges. Therefore there are many YUV, or YCbCr, or YCoCg combinations
that result in invalid RGB values.

41
HUMAN HEARING, PERCEPTION and SPEECH PRODUCTION
3.1 Human Ear Structure
The human ear is a particularly complex organ, the more especially as the information from
two ears is combined in a sophisticated neural network, the human brain. There are however a lot of
poorly understood phenomena and astonishing effects related to human hearing.
Figures 3.1 and 3.2 illustrate the major structures and phenomena taking place in the human ear
[25–28].
Pina
(Feather)
Auditory
canal
Ear drum
Hammer Anvil
Stapes
Semicircular canals
Cochlea
Nerve
fibres
Oval
window
Eustachian tube
Round
window
Outer ear Inner ear
Middle ear
Fig.3.1. Cross-section of the human ear
Sound
waves
in air
Outer ear Ear
canalEar drum
Middle ear
bones
Round
window
Oval
window
Sound waves
in liquid CochleaBasilar
membrane
High
frequency
detection
Medium
frequency
detection
Low
frequency
detection
Perilymph
Fig.3.2. Functional diagram of the human ear
The outer ear is composed of two parts: the visible earlobe and cartilage attached to the side of
the head, and the ear canal, a tube about 0,5 cm in diameter extending about 3 cm into the head. These
structures direct environmental sounds to the sensitive middle and inner ear organs located safely
inside of the skull bones. The ear canal ends with a thin sheet of tissue named the tympanic membrane
or ear drum. Sound waves striking the tympanic membrane force it to vibrate. The middle ear is a set
of small bones that transfer this vibration to the cochlea (inner ear) where it is converted to neural
impulses. The cochlea is a liquid filled tube roughly 2 mm in diameter and 3 cm in length. Although
shown straight in Figure 3.2, really the cochlea is rolled up and looks like a small snail shell as is seen
in Figure 3.1. In fact, cochlea is derived from the Greek word for snail.
Sound waves enter the auditory canal and the pulsating pressure variations push on the eardrum.
Because the other side of the ear drum (known as the middle ear) is held at a fairly constant pressure
the sound causes the eardrum to vibrate. The outer ear canal, because of its shape and length, is
responsible for the high sensitivity to sounds with frequency components around 4 kHz.
The vibrations of the ear drum are transferred to the three small bone sequence known as the
hammer, anvil, and stirrup bones. This mechanism is designed to effectively couple the sound

42
vibrations from the air in thre outer ear into the fluid filled cochlea (inner ear). This task is
accomplished in part by the lever action of the bones but more by the increase in pressure due to the
fact that the stirrup bone pushes on a much smaller surface area than the surface area of the eardrum
amplifying the pressure of the sound wave.
The middle ear transfers sound energy from the oscillations of air particles in the outer ear to
oscillations in the fluids within the inner ear. The middle ear system acts like a transformer, matching
the acoustic impedance between the air and the fluids at frequencies centered at 1 kHz. The inner ear
transmits the fluid oscillations to the organ of Corti on the basilar membrane, where sensory cells
convert the fluid oscillations to signals that the nervous system can process. The inner ear also can
separate frequencies, because different frequencies produce maximum oscillations at different
positions along the basilar membrane.
When sound waves try to pass from air into liquid, only a small part of the sound energy is
transmitted through the interface, while the remainder of the energy is reflected. This is because air
has a low mechanical impedance (low acoustic pressure and high particle velocity resulting from low
density and high compressibility), while liquid has a high mechanical impedance (high acoustic
pressure, low particle velocity resulting from high density and low compressibility). Otherwise it
requires more effort to wave one‘s hand in water than it does to wave it in air. This difference in
mechanical impedance results that most of the sound energy is reflected at an air/liquid interface.
The middle ear is an impedance matching network that increases the part of sound energy
entering the liquid of the inner ear. For example, fish do not have an ear drum or middle ear, because
they have no need to hear in air. Basically, the impedance conversion is determined by the difference
in area between the ear drum (receiving sound from the air) and the oval window (transmitting sound
into the liquid). The ear drum has an area of about 60 mm2, while the oval window has an area of
roughly 4 mm2. Since pressure is equal to force divided by area, this difference in area increases the
sound wave pressure by about 15 times.
The basilar membrane, which is found within the cochlea, is the supporting structure for about
12000 sensory cells forming the cochlear nerve. The basilar membrane is stiffest near the oval
window, and becomes more flexible toward the opposite end, allowing it to act as a frequency
spectrum analyzer. When exposed to a high frequency signal, the basilar membrane resonates where
it is stiff, resulting in the excitation of nerve cells close to the oval window. Likewise, low frequency
sounds excite nerve cells at the far end of the basilar membrane. This causes specific fibers in the
cochlear nerve respond to specific frequencies. This organization of hearing nerve fibers is called the
place principle, and is preserved throughout the auditory pathway into the brain.
3.2 Limits of Hearing
In human hearing is also used another information encoding scheme called the volley principle
[25, 28]. Nerve cells transmit information by generating brief electrical pulses called action potentials.
A nerve cell on the basilar membrane can encode audio information by producing an action potential
in response to each cycle of the vibration. For example, a 200 Hz sound wave can be represented by
a neuron producing 200 action potentials per second. However, this only works at frequencies below
about 500 Hz. This is the maximum rate that neurons can produce action potentials. The human ear
overcomes this problem by allowing several nerve cells to take turns performing this single task. For
example, a 3000 Hz tone might be represented by ten nerve cells alternately producing potentials at
300 times per second. This extends the range of the volley principle to about 4 kHz. Above this mark
the place principle is solely used.
The ear is a very sophisticated auditory organ and can be thought of as a complex instrument
for auditory signals. Human hearing can detect small variations in air pressure, ranging from 10 µPa
up to 100 Pa. The detection of these small variations occurs in the presence of atmospheric pressure,
where 1 atm=101,3 kPa.

43
Humans perceive loudness on a logarithmic scale. The international standard reference for
sound pressure level measurements is 20 µPa (0 dB), which is the threshold of quiet. This is
considered the nominal threshold of hearing, although approximately half of the general population
can sense sounds at even lower levels. On the opposite end of sound pressure level measurements,
humans experience discomfort and pain from sounds with sound pressure levels greater than 100 Pa
(134 dB). Within this range in level, humans can typically discern changes as small as 1 dB.
Humans perceive loudness on a logarithmic scale. Therefore it is common to express sound
intensity on a logarithmic scale, called decibel Sound Power Level (SPL). On this scale, 0 dB SPL is
a sound intensity of 10-16 W/cm2 and corresponds to the international standard reference equal to
20 µPa for sound pressure level measurements. This is about the weakest sound detectable by the
human ear, i.e. the threshold of the quiet. However approximately half of the general population can
sense sounds at even lower levels. Normal speech is at about 60 dB SPL. This corresponds to sound
intensity of about 10-10 W/cm2 and pressure levels of about 20 mPa. Humans experience discomfort
from sounds with sound pressure levels greater than 100 Pa (134 dB SPL, ≈5∙10-3 W/cm2), while
painful damage to the ear occurs at about 140 dB SPL (10-2 W/cm2).
The difference between the loudest and weakest sounds that humans can hear is about 120 dB,
a range of one million in amplitude. Listeners can detect a change in loudness when the signal is
altered by about 1 dB (a 12% change in amplitude). In other words, there are only about 120 levels
of loudness that can be perceived from the weakest whisper to the loudest thunder. The sensitivity of
the ear is amazing; when listening to very weak sounds, the ear drum vibrates less than the diameter
of a single molecule.
The perception of loudness relates roughly to the sound power to an exponent of 1/3. For
example, if you increase the sound power by a factor of ten, listeners will communicate that the
loudness has increased by a factor of about two (101/3 ≈ 2). This is a main problem for eliminating
undesirable environmental sounds, for example, the noise in the neighboring apartment. Suppose
somebody accurately covered 99% of his apartment walls with a perfect soundproof material,
excluding doors, corners, vents, etc., i.e. missing only 1% of the surface area. Therefore the sound
power has been reduced to only 1% of its former value, but the perceived loudness has only dropped
to about 0,011/3 ≈ 0,2 , i.e. to 20%.
The range of human hearing is generally considered to be 20 Hz to 20 kHz, but it is far more
sensitive to sounds between 1 kHz and 4 kHz. Frequency components outside this range are not
generally considered to impact the human perception of sound, regardless of the sound pressure level.
As explained in the previous section, there are physical reasons why human hearing is most sensitive
to frequency components around 1 kHz and 4 kHz. For example, listeners can detect sounds as low
as 0 dB SPL at 3 kHz, but require 40 dB SPL at 100 Hz (an amplitude increase of 100). Listeners can
tell that two tones are different if their frequencies differ by more than about 0,3% at 3 kHz. This
increases to 3% at 100 Hz. For comparison, adjacent keys on a piano differ by about 6% in frequency.
Many studies have demonstrated the sensitivity of the ear as a function of frequency, which is
typically plotted in equal loudness curves as in the following Figure 3.3.

44
Quiet threshold
20,50,05 0,20,02 0,1 51 f , kHz10 20
20
40
60
0
Sound pressure, dB
120
Pain threshold
Fig. 3.3. Equal loudness curves corresponding to threshold of the quiet and pain limit
It is easiest to consider the threshold of hearing line – the lowest curve on the Figure 3.3. The
curve is 0 dB at 1000 Hz which is the standard reference level for the threshold of hearing. At other
frequencies this threshold of hearing deviates from 0 dB. At low frequencies the threshold is much
higher, for example, at 100 Hz a tone must be almost 40 dB before the average person can hear it. In
contrast at 4000 Hz sounds that are a few dB below 0 dB are audible. The other curves (not presented
in he Figure 3 except pain threshold curve) are curves that represent equal loudness profiles. Note
that for very loud sounds, 80 to 100 dB, the large difference in response between the low and mid
frequencies disappears.
Besides the sound pressure level-dependent sensitivity of hearing, humans also can differentiate
very fine changes in frequency. Below frequencies of 500 Hz, the ear can differentiate tone bursts
with a frequency difference of approximately 1 Hz. Above 500 Hz, the noticeable difference is
proportional to the frequency (0,002×f ).
Two ears provide human with the ability to identify the direction of the sound. Human listeners
can detect the difference between two sound sources that are placed as little as three degrees apart,
about the width of a person at 10 meters. This directional information is obtained in two separate
ways. First, frequencies above about 1 kHz are strongly shadowed by the head. In other words, the
ear nearest the sound receives a stronger signal than the ear on the opposite side of the head. The
second way obtaining directional information is that the ear on the far side of the head hears the sound
slightly later than the near ear, due to its greater distance from the source. Based on a typical head
size (about 22 cm) and the speed of sound (about 340 meters per second), an angular discrimination
of three degrees requires a timing precision of about 30 µsec. Since this timing requires the volley
principle, this way obtaining directional information is predominately used for sounds less than about
1 kHz.
Both these sources of directional information are greatly aided by the ability to turn the head
and observe the change in the signals. An interesting sensation occurs when a listener is presented
with exactly the same sounds to both ears, such as listening to monaural sound through headphones.
The brain concludes that the sound is coming from the center of the listener's head.
While human hearing can determine the direction of a sound source, it poorly identifies the
distance to the sound source. This is because there are few attributes available in a sound wave that
can provide this information. Human hearing weakly perceives high frequency sounds that are nearby,
and low frequency sounds that are distant. This is because sound waves dissipate their higher
frequencies as they propagate long distances. Another weak clue to distance is echo content,
providing a perception of the room size. For example, sounds in a large auditorium will contain echoes
at about 100 millisecond intervals, while 10 milliseconds are typical for a small office. Some species
have solved this ranging problem by using active sonar. For example, bats and dolphins produce
clicks and squeaks that reflect from nearby objects. By measuring the interval between transmission
and echo, these animals can locate objects with about 1 cm resolution. Experiments have shown that
some humans, particularly the blind, can also use active echo localization to a small extent.

45
3.3 Masking
Masking describes the phenomenon in which a sound becomes intangible due to the presence
of another sound [25, 28]. An example of this phenomenon is when loud music masks the sound of
emergency sirens, or when a background noise partially masks conversational speech. The transition
between an unmasked tone and a completely masked tone is continuous. The masked threshold is the
sound pressure level of a barely-audible test tone in the presence of a masking sound.
3.3.1 Time Masking Simultaneous masking describes the effect when the masked signal and the masking signal
occur at the same time. Human hearing is sensitive to the temporal structure of sound, and masking
also can occur between sounds that are not present simultaneously. Pre-masking is when the test tone
occurs before the masking sound. Post-masking is when the test tone occurs after the masking sound.
The following Figure 3.4 shows the time regions of pre-masking, simultaneous masking, and post-
masking in relation to the masking signal.
Pree-
masking Post-masking
Sound pressure, dB
Simultaneous masking
40-40 -20-60 0160 t , ms200 180 20 40 60 80 100120 140 160
50
40
60
80
70
90
Delay time, td (ms)Time after masking
onset, Δt (ms)
Masking sound
Fig. 3.4. Illustration of time masking – the time regions of pre-masking, simultaneous masking, and post-masking in
relation to the masking signal
Post-masking is a pronounced phenomenon that corresponds to decay in the effect of the
masking signal. Pre-masking is a more subtle effect caused by the fact that hearing does not occur
instantaneously because sounds require some time to sense. As indicated in Figure 3.4, researchers
typically can measure pre-masking for only about 20 ms. Post-masking is the more dominant temporal
effect and can be measured for 100 ms following the termination of the masking sound. Both the
threshold in quiet and the masked threshold depend on the duration of the test tone. Researchers must
know these dependencies when investigating pre- and post-masking because they use short-duration
test signals to perform these measurements.
3.3.2 Frequency Masking Broadband white noise can mask test tones. White noise has a spectral density that is
independent of frequency. Other types of noise and signals, such as pink noise, narrow-band noise,
pure tones, and complex tones, also can mask a test signal. When narrow-band noise is the masking
signal, masked thresholds show a very steep rise greater than 100 dB per decade as the test tone
increases in frequency up to the center frequency of the narrow-band noise. This test tone increase is
independent of the level of the masking noise. For frequencies greater than the center frequency of
the noise, the masked threshold decreases quickly for low levels of masking noise but more slowly
for high levels of masking noise. When pure tones are the masking signal, the signal needs additional
filters to remove measurement artifacts such as audible beating and difference tones. The following
Figure 3.5 shows the masked threshold for a masking signal at a frequency of 1 kHz.

46
Masked sounds
Quiet treshold
Masking sound
Masked threshold
20,50,05 0,20,02 0,1 51 f , kHz10 20
20
40
60
80
0
Sound pressure, dB
Masked threshold
Fig. 3.5. Illustration of frequency masking – masked thresholds for a masking signal at a frequency of 1 kHz
3.4 Ear as spectrum analyzer
The fluid in the cochlea is vibrated with the frequencies of the incoming sound wave. The
basilar membrane is the element that separates these frequencies into components. The basilar
membrane is a long structure that is stiff and hard near the round and oval windows and floppy and
loose near its far end. The membrane resonates at different positions along its length depending on
what frequency is traveling in the cochlear fluid. High frequencies are resonant near the hard stiff end
whereas low frequencies are resonant near the far floppy end. Nerves that run the length of the
membrane detect the position of the resonance and hence the frequency (or frequencies) of the
incoming sound. The typical length of the basilar membrane is about 35 mm. There are 10 octaves of
frequency resolution along the length of the membrane each octave occupies about 3,5 mm.
The Figure 3.6 below plots the frequency versus position along the membrane.
x, mm0 3,5 7,0 10,5 14,0 17,5 21,0 24,5 28,0 31,5 35,0
40
20
80
160
320
640
1280
2560
5120
10240
20480
Oval window Helicotrema
f, Hz
Fig. 3.6. Resonant frequencies versus position along the basilar membrane
Note that the curve is approximately linear and that for every 3,5 mm travel along the horizontal
axis (corresponding to distance along the length of the basilar membrane) the resonant frequency
changes by a factor of 2. For example, in the first 3,5 mm the resonant frequency drops from 20480
to 10240 Hz. Note also that the vertical scale is logarithmic; each equal sized increment up the
frequency axis increases by a multiplicative factor of 2.
The ear acts as a mechanical spectrum analyzer splitting up sounds (oscillating pressure
variations as a function of time) into their component frequencies. In other words the signal that is
fed to our nerves and then is subsequently analyzed by our brains is proportional to the strength of
each frequency in the sound [29]. As we will appreciate later this analysis in frequency rather than
time is a very useful way to understand much more about a sound – particularly a musical sound –
when it comes down to understanding concepts such as pitch, timbre, and the scientific basis of
consonance.
Unfortunately a mechanical spectrum analyzer is not perfect at homing in on just one single
frequency exactly. The resonance of the basilar membrane is not perfectly isolated to one particular

47
position for a give pure tone input. There is a width to the resonance. Imagine listening to a pure tone
of 640 Hz. According to the figure above, the resonant position will be at 21 mm along the length of
the basilar membrane. However, that segment of the membrane cannot oscillate without making a
small region either side of the 21 mm position oscillate also. It's like grabbing the middle of your top
lip and pulling it up and down. The parts of your lip on either side get pulled up and down as well
because the lip meat is all connected. The net result is that a pure tone excites the nerves along the
basilar membrane for a small length on either side of the resonance position. Because the position
along the membrane corresponds to frequency this statement is equivalent to saying that a pure tone
excites nerves corresponding to a band of frequencies about the pure tone resonance. This band of
frequencies is called the critical band. The critical band changes from the low to high frequencies.
The graph below in Figure 3.7 shows the width of the critical band on the vertical axis versus the
center frequency of the pure tone on the horizontal axis.
Center frequency (Hz)
Cri
tica
l b
and
wit
h (
Hz)
50 100 200 500 1k 2k 5k 10k20
50
100
200
500
1000
2000
5000
Fig. 3.7. The critical band versus central frequency
Even though the critical band is quite wide we are able to process the information given by the
nerves in the basilar membrane to be able to discern very small differences between two pure tone
frequencies. The smallest interval between two frequencies that we can resolve with our ears is called
the Just Noticeable Difference (JND). Some of the humans can resolve frequencies at the 1 Hz
difference level. The rest of humans can typically resolve frequency differences of between 3 and
5 Hz.
Developing spectrum analyzers of audio signals we have to remember one very important
lesson comming from the audio signals processing praxis: signals should be processed in a manner
consistent with how they are formed or analyzed by apropriate human organs. So the distribution of
critical bands along frequency axis suggest us the concept for choosing frequency bands of spectrum
analyzer filters. However for choosing central frequencies of filters JND in frequency does not
suggest us practical consept as the number of filters would be enormous. Some researchers the
solution to the problem found analyzing perception of continous sounds pitch.
Pitch is our perceptual interpretation of frequency that allows the ordering of sounds on a
frequency-related scale. Pitches are compared as "higher" and "lower" in the sense associated with
musical melodies, which require sound whose frequency is clear and stable enough to distinguish
from noise. Pitch is a major auditory attribute of musical tones, along with duration, loudness, and
timbre. Pitch may be quantified as a frequency, but pitch is not a purely objective physical property;
it is a subjective psychoacoustic attribute of sound. Historically, the study of pitch and pitch
perception has been a central problem in psychoacoustics, and has been instrumental in forming and
testing theories of sound representation, processing, and perception in the auditory system
In general, we perceive pitch logarithmically in relations to frequency. Every doubling in Hz is
perceived as an equivalent octave. It is thought that because a doublings of frequency causes a

48
response at equal distance on the basilar membrane, we hear octaves as related. In fact, because of
the logarithmic spacing of pitch placement on the membrane it can be extrapolated that we perceive
differences in pitches not as differences in frequency, but as the ratio of pitches separating them or
musical intervals which are ratios of frequencies and not linear differences. So, if one pair of musical
sounds has a difference in pitch of 220 Hz and the other a difference of 440 Hz, they are percieved as
having the “same” interval.
Hence, the human auditory system doesn’t interpret pitch in a linear manner. The human
interpretation of the pitch reises with the frequency, which in some applications may be a unwanted
feature. To compensate for this the mel-scale was developed [30]. The sole purpose of the experiment
were to describe the human auditory system on a linear scale. The experiment showed that the pitch
is lineary perceived in the frequency range 0-1000 Hz. Above 1000 Hz, the scale becomes logaritmic.
An approximated formular widely used for mel-scale is shown below:
1000log 1
log(2) 1000
Hzmel
fF
,
where melF is resulting pitch frequency on the mel-scale. This is plotted in Figure 3.8.
10 100 1000 100000
500
1500
2000
2500
3000
3500
Frequency, (Hz)
Pit
ch,
(Mel
s)
1000
a)
500
1500
2000
2500
3000
3500
1000
4000
2000 4000 6000 8000 1000012000 14000 16000
Frequency, (Hz)
Pit
ch, (M
els)
b) Fig. 3.8. Relationship between the frequency scale and mel-scale: a) - logarithnic frequency scale, b) - linear
frequency scale
With the mel-scale applied, coefficients from a LPC will be concentrated in the lower
frequencies and only around the area perceived by humans as the pitch, which may result in a more
precise description of a signal, seen from the preception of the human auditory system. This is
allthough not proved and it is only suggested that the mel-scale may have this effect. The mel-scale
is, regardless of what have been said above, a widely used and effective scale within speech
recognition, in which a speaker need not to be identified, only understood.
So, it is hoped that mel scale more closely models the sensitivity of the human ear than a purely
linear scale, and provides for greater discriminatory capability between speech segments
Mel frequency usualy is used developing filterbanks. This is illustrated in Figure 3.9. It has
been found that the energy in a critical band of a particular frequency influence the human auditory
systems perception. This critical band bandwidth varies with the frequency, where it is linear below
1 kHz and logaritmic above. Combining this with the mel-scale, the distributions of these critical
bands becomes linear. Below 1 kHz critical bands are placed linear around 100, 200,..., 1000 Hz.
Above 1 kHz these bands are placed with the mel-scale.

49
0,5
1,0
0 500 1000 1500 2000 2500 3000 f, Hz
Mag
nit
ude
of
crit
ical
ban
d f
ilte
r
Critial band filter central frequency
Fig. 3.9. Mel scale filterbank: each peak is the center frequency in the critical band
3.5. Human Voice
The human voice is defined as waves of air-pressure. A schematic diagram of the human speech
production system is shown in Figure 3.10 [31–33]. It is produced by airflow pressed out of the lungs
and going out through the mouth and nasal cavities. On its way from the lungs through the vocal tract,
the air passes through the vocal folds, vibrating them at different frequencies.
Lip
Teeth
TonqueNostril
Nasal
Cavity
Oral
Cavity
Pharingeal
Cavity
Larynx
(vocal folds are
within the larynx)
Trachea
Larynx opening
into pharings
Esophagus
Fig. 3.10. A schematic diagram of the human speech production system
The vocal folds are thin muscles looking like lips, placed at the larynx. At their front end they
are connected together permanently, and on the other end they could be open or closed.
When they are closed, the vocal folds are stretched next to each other, forming an air block.
The air pressure from the lungs is forcing its way through that block, pushing the vocal folds aside.
The air passes through the formed crack and the pressure drops, allowing the vocal folds to close
again. This process goes on and on, vibrating the vocal folds to produce the voiced sound. Thus, the
glottal flow is automatically chopped up into pulses. An example of the signals generated by such a
model is shown in Figure 3.11 [31–33]. This glottal pulse has a rise (opening phase) time of about
5,0 ms and a fall (closing phase) time of about 1,7 ms (opening to closing ratio of about 3:1).
0 5 10 15 20 Time (msec)
500
Glottal Volume
Velocity (cc/sec)1000
Fig. 3.11. An example of glottal volume velocity
The vocal folds length and their tension determine the pitch, which is the fundamental
frequency of the voice sound. Pitch is the main acoustic correlate of tone and intonation. The main
parameter of pitch (pitch period) is repetition period of glottal pulses.
In males, the vocal folds are usually longer than females, causing a lower pitch and a deeper
voice.

50
When the vocal folds are open, they form a triangle, allowing the air to reach the mouth cavity
easily. Constriction in the vocal tract, causing air turbulence, is responsible for random noise that
forms the unvoiced sound.
In summary in speech production three major mechanisms of excitation could be identified. These
are:
1. Air flow from the lungs is modulated by the vocal fold vibration, resulting in quasi-periodic
pulse-like excitation.
2. Air flow from the lungs becomes turbulent as the air passes through a constriction, resulting
in a noise-like excitation.
3. Air flow builds up pressure behind a point of total closure of vocal fold. The rapid release of
this pressure, by removing the constriction, causes a transient excitation.
A detailed model of excitation of sound in the vocal system involves the lungs, bronchi, trachea,
the glottis, and the glottal tract. A block diagram of human speech production is shown in Figure 3.12.
SP
Muscle force
Lungs
Velum
Trachea, bronchia
Vocal folds
Oral cavity Lips
NostrilNasal cavity
Pharingeal cavity
Nasal sound
output
Oral sound
output
Fig. 3.12. A block diagram of human speech production
3.6 Vowels and Consonants
The spoken words are made of vowels and consonants. All the vowels are produced when the
vocal folds are closed (a, i, o), therefore they are voiced.
The consonants, on the other hand, can be voiced, unvoiced or semi-voiced. In turn among
voiced and unvoiced consonants one can distinguish voiced and unvoiced stop consonants.
The voiced stop consonants (b, d, g) are transient, noncontinuant sounds which are produced
by building up pressure behind the total constriction somewhere in the oral tract, and suddenly
releasing the pressure. During the period of total closure of the tract the vocal folds do not vibrate.
Following the period of closure there is a brief interval of friction followed by a period of aspiration
before voiced excitation begins.
The unvoiced stop consonants (p, t, k) are similar to their voiced counterparts (b, d, g) with one
exception. The difference between the unvoiced stop phonemes and the voiced stop phonemes is not
just a matter of whether articulatory voicing is present or not. Rather, it includes when voicing starts
(if at all), the presence of aspiration (airflow burst following the release of the closure), and the
duration of the closure and aspiration.
Voiced consonants are formed by closing the vocal folds (m, n). For unvoiced consonants (s, f)
there is no vocal folds vibration, because they are open, and the excitation in this case is the turbulent
flow of air passing through a constriction in the vocal tract.
The semi-voiced consonants are a combination of those two (v, z). v for example is said like f
but with the vocal folds closed.

51
3.7 Engineering Model
There are proposed some approximations of vocal folds vibrations for voiced sounds. For
example, on the basis of analysis of synthetic speech quality Rosenberg [34] found that a good
synthetic pulse waveform is of the form
11 12
1 1 1 1 2
[1 cos( / )], 0 ,
( ) cos[ ( ) / 2 ], ,
0, otherwise.
n N n N
n n N N N n N N
(3.1)
Figure 3.13 shows the pulse waveform and its spectrum for typical values of parameters 1N
and 2N .
40 n0
1,0
0,5
a)
( )n
10 20 30
b)1,0 2,0 3,0 4,0
0
15
30
-15
-30
, kHzf
( ) , dBf
0
Fig. 3.13. Rosenberg approximation of glottal pulse; (a) – pulse waveform, (b) – pulse spectrum
It can be seen from the pulse spectrum form, that the sequence of such pulses can be realised
by appropriate lowpass filtering of rectangular pulses (shaped pulses) as depicted in Figure 3.14.
Impulse train
generator
Impulse train
generatorLowpass
filter
Pitch periodPitch periodAmplitude control AvAmplitude control Av
( )u n
Fig. 3.14. Generation of the exitation signal for voiced speech
Voiceless sounds‘ exitation model is simpler. Noiselike exitation sufficiently exactly can be
modeled by colored noise realised by appropriate low frequency filtering of white noise as presented
in Figure 3.15.
White noise
generator
White noise
generatorLowpass
filter
Lowpass
filter
Gain control ANGain control AN
( )u n
Fig. 3.15. Generation of the exitation signal for unvoiced speech
The simplest physical model of vocal tract that has a useful interpretation in terms of the speech
production process is depicted on Figure 3.16.
LipsLips
Vocal tractVocal tract
GlottisGlottis
A(x, t)
Fig. 3.16. The simplest physical model of vocal tract
As follows from acoustical theory of speech production the vocal tract can be modeled as a tube
of nonuniform, time-varying cross-section [31, 33]. Closed form solutions to partial differential
equation describing this model are not possible. Numerical solutions can be obtained, however require

52
knowing vocal tract area function ( , )A x t , the air pressure and air volume velocity for values of x and
t in the region bounded by the glottis and the lips and boundary conditions at each end of the tube.
A widely used more practical model for speech production is based upon the assumption that
the vocal tract can be represented as a concatenation of lossless acoustic tubes of different length, as
depicted in Figure 3.17, a. The constant cross-sectional areas [ ]kA of the tubes are chosen as to
approximate the area function ( )A x of the vocal tract. If a large number of tubes of short length are
used, one can reasonably expect the resonant frequencies of the concatenated tubes to be close to
those of a tube with continuously varying area function. Moreover the lossless tube models provide
a convenient transition between continuous-time models and discrete-time models as they have many
properties in common with digital filters. Particularly natural transition to digital filters representation
is obtained in the case of concatenation of lossless tubes of equal length as depicted in Figure 3.17,
b.
Vocal tractVocal tract
LipsLipsAk
a)a)
LipsLips
Vocal tractVocal tract
Ak
x x x x x x xb)b)
Fig. 3.17. Representation of vocal tract as a concatenation of lossless acoustic tubes: (a) – of different length, (b) – of
equal length
The lossless tube model of Figure 3.17, b form can be mathematically described by a system
function ( )H z of the form [31, 33]
1
( )
1P
k
k
k
GH z
b z
, (3.2)
where, in the meantime unknown, coefficients G and { }kb depend on the set of the area function
( )A x cross-sections kA . The system function ( )H z corresponds to the system function of the infinite
impulse response (IIR) digital filter. One way to implement this form of system function is to use one
of the standard digital filters implementation structures, for example, direct form, as presented in
Figure 3.18. Here function ( )u n represents an excitation function and ( )s n – speech signal.
......
( )s n
z -1z -1 z -1 z -1ˆ( )s n
1b2b1Pb Pb
( )u n
......
......
G
( )v n
Fig. 3.18. Direct form implementation of digital filter system function describing vocal tract
Thus, the speech mechanism can be modeled as a time varying filter (the vocal tract) excited
by an oscillator (the vocal folds) with different outputs. When voiced sound is produced, the filter is
excited by an impulse chain, in a range of frequencies (60-400 Hz). When unvoiced sound is
produced, the filter is excited by random colored noise, without any observed periodicity. These
attributes can be observed when the speech signal is examined in the time domain.
Putting all above described subsystems together we obtain the model of Figure 3.19 [31, 33].

53
Shaped
pulses
generator
Shaped
pulses
generator
Colored
noise
generator
Colored
noise
generator
Pitch period NT
Unvoiced
Voiced
G
( )u n ( )v n ( )s n
Parameters of
voice tract filter
Switch „voiced -
unvoiced“ control
Voice tract
filter
H(z)
Voice tract
filter
H(z)
Speech signal
Fig. 3.19. General model for speech production
Naturally the model covers not all aspects of speech production. For example it prevents one
from modelling the mixed excitation which is used pronouncing some sounds, for example voiced
fricatives (z, v). The model works very well in the case of slowly changing filter parameters, i.e.
dealing with continuant sounds as vowels. The model works adequately but much worse in the case
of transient sounds such as stops. Some more sophisticated models for isolated cases, for example,
such as voiced fricatives were developed [33].

54
4. DIGITIZATION of SIGNALS
4.1 Pulse Code Modulation
Analog signal is continuous in time and amplitude levels. The process of discretization of the
analog signal yields the equivalent digital signal which is discrete in time and amplitude levels.
Usually the digital signal is expressed in pulse code modulation (PCM) form [35–38].
The process of pulse code modulation (PCM) is analog-to-digital conversion and is done by an
Analog-to-Digital Converter (ADC), block diagram of which is depicted in Figure 4.1. A typical ADC
contains the three components or blocks: sampler, quantizer and encoder. In essence, the analog-to-
digital conversion is the representation of the values of instantaneous samples ( )ss nT of an analog
signal ( )s t at the output of the sampler by a series of pulses that correspond to a series of bits ( )sc nT
at the output of encoder. Assuming that group of B bits compose a digital word, there are 2BM
unique code words. Each code word corresponds to certain amplitude of level. However each sample
value can be any one of an infinite number of levels. Therefore the digital word that represents the
amplitude closest to the actual sampled value is used. This procedure is called quantizing. That is,
instead of using the exact sample value of the analog waveform ( )ss nT , it is replaced by the closest
allowed value ˆ( )ss nT . There are 2BM allowed values, each corresponding to one of the code
words. So the PCM signal is generated by carrying out three basic operations: sampling, quantizing
and encoding.
For reconstruction the analog signal from PCM signal the Digital-to-Analog Converter (DAC)
and the low pass reconstruction filter are used. Block diagram of a reconstruction system is presented
in Figure 4.2. DAC’s, role is to convert the binary code words ( )sc nT received from some
communication channel or DSP device to an intermediate form of the final analog signal. Commonly
this is in the form of flat-top pulse amplitude modulation signal representing quantized instantaneous
samples ˆ ( )ss nT . Reconstruction filter usually filters out unwanted high frequency components and
thereby performs the final conversion operation from the digital domain to analog. The received code
words and back converted quantized instantaneous samples and analog signal can differ from their
original versions for a variety of reasons and therefore are denoted by ( )sc nT , ˆ ( )ss nT and ( )s t .
ˆ( )ss nT
( )sc nT
( )ss nT
Analog-to-Digital Converter
Sampler (S&H)
Encoder
Quantizer
( )ш t
PCM
signalAnalog
signal
( )s t
...
Ts
Digital-to-Analog
Converter
DAC
'( )s t'( )sc nT
PCM
signal
ˆ '( )ss nT
Low pass
reconstruction
filter Analog
signal
Fig. 4.1. Analog-to-digital converter Fig. 4.2. Analog signal reconstruction system
4.2 Sampling: Nyquist- Shennon Sampling Theorem
The sampling operation samples the incoming signal at regular interval called sampling period
or sampling interval (denoted by sT ). The reciprocal of the sampling interval is the sampling rate or
sampling frequency (denoted by sF ) which defines the number of samples per unit of time (usually
seconds) taken from a continuous signal to make a discrete signal. For time-domain signals, the unit

55
for sampling rate is Hertz (inverse seconds, 1/s, s−1), sometimes noted as Sa/s or S/s (samples per
second).
1/s sF T
Correct selected sampling rate guarantees the faithful representation of the signal in digital
domain and the faithful conversion back to analog domain. The criterion for correct selection of
sampling rate is described by Nyquist – Shennon sampling theorem. For the baseband signals which
frequency composition is restricted to a maximum frequency of maxF Hz (extending from 0 Hz to
maximum maxF Hz) it can be explained as follows [35–38]: „In order for a faithful reproduction
and reconstruction of an analog baseband signal it should be sampled at a sampling frequency
sF that is greater than or equal to twice the maximum frequency of the signal maxF ”, i.e.
max2sF F . (4.1)
For example, if the maximum frequency of the signal is 5 kHz, for the faithful representation
of the signal in digital time domain the sampling frequency can be chosen as 10 kHzsF . Higher
the sampling frequency higher is the accuracy of representation of the signal. Higher sampling
frequency also implies more samples per time unit and more storage space and more calculation
operations per time unit requiring from the following DSP units. The minimal correct sampling
frequency min max2sF F is called Nyquist’s frequency and usually denoted by NF
4.3 Ideal Sampling
Consider analog signal wave consisting of some components of different frequencies
1 2 max, ,...,F F F (see Figure 4.3, a and b). Now, to satisfy the sampling theorem, which is stated above,
the sampling frequency can be chosen according to the equation (4.1).
We start analyzing from the ideal (impulse) sampling process, which definitely differs from the
real sampling process in some aspects. However it helps to explain effects and results of sampling
theorem in simple phrase. The ideal sampling process in time domain often called impulse sampling
mathematically can be expressed as multiplication of the signal ( )s t by a series of extremely short
pulses (pulse train) ш(t) at regular interval – sT as depicted in Figure 4.3, a, c and e. The mathematical
model of ideal sampler is presented in Figure 4.3, h. In frequency domain, the output of the ideal
sampling process gives the components of following frequencies: 1 2 max, ,...,F F F (original frequency
content of the signal), 1 2 max, ,...,sF F F F , 1 2 max2 , ,...,sF F F F , 1 2 max3 , ,...,sF F F F , and so on … This
is illustrated in Figure 4.3, f.
Now, comparing the frequency components composition of analog and sampled versions of
signal we see that the sampled signal contains lots of supplementary frequency components
1 2 max, ,...,sF F F F , 1 2 max2 , ,...,sF F F F ,..., etc. It is clear from this that by converting the ideally
sampled signal back to analog domain it is necessary to filter out those supplementary frequency
components. This can be done by using so-called “reconstruction” filter. In our case it is a low pass
filter that is designed to pass only those frequency components that are up to maximum analog signal
frequency maxF Hz and to attenuate components which frequencies are higher than maxF Hz. The
frequency response ( )LPH f of such a low pass filter is depicted in Figure 4.3, f.

56
t
e)
Ts
ˆ( )s t
g)( )ш t
( )s t
c)
ш(t )
Ts t
|Ш ( f )|
2Fs Fs 0
d)
F
FF max 0
|S ( f )|
b)a)
t
s (t)
f)
F0 2Fs Fs
maxF
( )LPH fˆ( )S f
2
sF 3
2
sF 5
2
sF
Folding frequencies
1 2 3 4 5
Aliasing zones
max2sF F
F0 2Fs Fs
h)
3Fs
......
ˆ( )S f
Overlaping and interfering zones
2
sF 3
2
sF 5
2
sF
max2sF F
Fig. 4.3. Illustration of ideal sampling process: (a) analog signal, (b) spectrum of analog signal, (c) sampling
function, (d) spectrum of sampling function, (e) ideally sampled signal, (f) spectrum of correctly sampled
signal and frequency response of low pass reconstruction filter, g) mathematical model of ideal sampler, (h)
spectrum of undersampled signal
4.4 Aliasing and Anti-Aliasing
The usage of too low sampling frequency max2sF F (undersampling mode) leads to an
unwanted effect called aliasing [35–38]. Let’s have a signal with two frequency components:
1 6 kHzF , which is our desired signal, and 2 12 kHzF , which is an unwanted component, e.g.
noise. The noisy component’s frequency is sufficiently away from the frequency of desired signal
and can be easily filtered out by appropriate filter. So, one can say this situation is not critical by
following signal processing.

57
Now let’s see what happens if we undersample the signal choosing the sampling frequency at
max18 kHz<2 24 kHzsF F . The broad-brush view of frequency components situation in
undersampling case is presented in Figure 3, h. Specific, under consideration case reflects in Figure 4.
The first frequency component 1 6 kHzF will produce the components at the sampler output of the
following frequencies: 6 kHz, 12 kHz, 24 kHz, 30 kHz, 42 kHz, 48 kHz, 60 kHz and so on… The
second frequency component 2 12 kHzF will produce the components of: 12 kHz, 6 kHz, 30 kHz,
24 kHz, 48 kHz and so on… Note the 6 kHz component produced by 2 12 kHzF will coincide and
interfere with our desired 1 6 kHzF component and will corrupt it. The main thing is to mention
that now interfering components will be not separable by any filter. This 6 kHz component is called
“alias” of the original noisy component 2 12 kHzF . Similarly the 12 kHz component produced by
1 6 kHzF component is an “alias” of 1 6 kHzF component. It will interfere with original noisy
component 2 12 kHzF and they will be also not separable. However there is no need to take any
measures to avoid the interference at 12 kHz since it is a noise and any way it has to be eliminated.
But it is necessary to do something with the aliasing component of 6 kHz produced by the noisy
component 2 12 kHzF because it will corrupt our desired signal.
1
6
F 18 6
12
18 6
24
36 6
30
36 6
42
54 6
48
54 6
60
72 6
66
, kHzF
2
9
sF
18
sF
3
2
27
sF
36
2 sF
5
2
45
sF
54
3 sF
7
2
63
sF
72
4 sF
b)
Aliasing pairs of frequency components
18
sF
36
2 sF
54
3 sF
72
4 sF18 12
6
2
12
F 18 12
30
2
9
sF
36 12
24
36 12
48
54 12
42
54 12
66
72 12
60
, kHzF
3
2
27
sF 5
2
45
sF 7
2
63
sF
Coincidental and interfering pairs of frequency components due to aliasing
c)
, kHzF
1
6
F 2
12
Fa)
Fig.4.4. Illustration of undersampling effects: (a) frequency components of analog signal, (b) spectral contribution by
16 kHzF and 18 kHz
sF , (c) spectral contribution by
212 kHzF and 18 kHz
sF
It should be noted that choosing another sampling frequency, e.g. max19 kHz<2 24 kHzsF F
gives in slightly different results. The component of 6 kHz will produce the sampler output
components of: 6 kHz, 13 kHz, 25 kHz, 32 kHz, 44 kHz and so on… The component of 12 kHz will
produce the components of: 12 kHz, 7 kHz, 31 kHz, 26 kHz, 50 kHz and so on… Now the

58
coincidental components disappeared. But there are pairs of components which are very close each
other, one can say overlapping pairs: 6 kHz and 7 kHz, 12 kHz and 13 kHz and so on… The
probability of interference between them is very high and the possibility to separate one from another
is very small.
It is clear that coincidence and interference of aliasing components occur if the chosen sampling
frequency is too low. All the frequency components from / 2sF to sF will be alias of frequency
components from 0 to / 2sF , and conversely. The frequency / 2sF is called “Folding frequency”
since the frequency components from / 2sF to sF fold back itself and can overlap and interfere with
the components from 0 to / 2sF , and conversely. In fact the aliasing zones occur on the either sides
of / 2sF , 3 / 2sF , 5 / 2sF , etc… and cause frequency reversal. Similarly aliasing also occurs on either
sides of sF , 2 sF , 3 sF ,… only don’t cause frequency reversal. All these frequencies are also called
“Folding Frequencies” without respect to frequency reversal. The Figures 4.3, f and h illustrate the
concept of aliasing zones, folding frequencies and overlapping and interfering zones.
Note spectrum in zone 2 is just a mirror image of spectrum in zone 1 with frequency reversal.
Similarly spectrum in zone 2 creates aliases in zone 3 only without frequency reversal; spectrum in
zone 3 creates mirror image in zone 4 with frequency reversal and so on…
In the example above, the folding frequency was at / 2 9kHzsF , so all the components from
9 kHz to 18 kHz will be the alias of the components from 0 kHz to 9 kHz. If the aliasing components
fall into the band of somebody interest, it is impossible to separate them from the original signal
components and as a result, the original signal will be corrupted. In order to prevent aliasing of
unwanted components, it is necessary to remove those frequencies that are above / 2sF before
sampling the signal. This is achieved by using an “anti-aliasing” filter that must be inserted before
the analog-to-digital converter.
An anti-aliasing filter, as a rule low pass filter, is designed to pass all the frequency components
which frequencies are bellow or equal to maxF and to attenuate those frequency components which
frequencies are above maxF and the folding frequency / 2sF . Hereby aliasing of unwanted
components is avoided.
A complete design of digital (PCM) signal generation system is presented in Figure 4.5. Thus,
a complete design of analog-to-digital conversion system contains an anti-aliasing filter preceding
the ADC and the complete design of digital-to-analog conversion system contains a reconstruction
filter succeeding the DAC (see Figure 4.2).
( )sc nT( )s t
( )ш t
Analog
signal
PCM
signal
Low pass anti-
aliasing filter
ADC
Fig.4.5. A complete design of digital (PCM) signal generation system
4.5 Flat-Top Sampling
It is important to note that the real sampling operation is much closer to flat-top sampling than
to ideal sampling [35]. Flat-top sampling generates a flat-top pulse amplitude modulation (PAM)
signal (see Figure 4.6, a). This signal could be generated by using a sample-and-hold (S&H) type
electronic circuit. One possible version of that circuit is depicted in Figure 4.6, b. There are two
operations involved in the generation of the flat-top PAM signal:

59
Instantaneous sampling of the continuous signal ( )s t every sT seconds as in the case of ideal
(impulse) sampling;
Lengthening the duration of each sample to obtain rectangular pulses of constant duration τ.
(The duration of pulses τ is called aperture.)
In digital circuit technology, these two operations are jointly called “sample and hold.” Due to
these two operations the amplitudes of regularly spaced pulses are varied in proportion to the
corresponding sample values of a continuous message signal ( )s t (see Figure 4.6, a).
However the values of the flat-top PAM signal frequency components differs from the values
of ideally sampled signal frequency components (compare illustrations in Figure 4.3, f and Figure 4.6,
c). One can readily see that there is some high frequency loss due to filtering effect caused by the flat-
top pulse shape. The overall envelope of frequency components decreases with increasing frequency
and reaches zero at the frequency 1/ (see Figure 4.6, c), where is the aperture of the PAM signal
pulses (see Figure 4.6, a). It means that less aperture causes less attenuation of higher frequency
components. Therefore attenuation of higher frequency components is called aperture distortions.
However, in the commonly used mode the aperture is equal to sampling interval, i.e. sT . In this
case the overall envelope reaches zero at the frequency which coincides with the sampling frequency
sF (see Figure 4.6, c and d) and the aperture distortions can be significant. There is the same high
frequency loss in the recovered analog waveform too. This can be compensated (equalized) at the
recovering part by making reverse distortions, i.e. by amplifying high frequency components in
inverse ratio with their attenuation. This is a very common practice called “Equalization”.
t
a) Ts
ˆ( )s t
s (t) ŝ (t)C
Sampling switch
Discharge switch
G1 G2
b)
0
Fmax
FFs 2Fs 3Fs
1
1
ˆ( )S f
0
Fmax
FFs 2Fs 3Fs c )
ˆ( )S f( )LPH f
Overall envelope,
2
1
1 sT
Overall envelope,2 sT
1 2
t
d)
ˆ( )s t
sT
Fig. 4.6. Illustration of flat-top sampling: (a) flat-top PAM signal (s
T ), (b) sample and hold circuit (1. G1 closes
to sample; 2. Capacitor C holds value of sample; 3. G2 discharges value;) (c) spectrum of flat-top PAM
signal, (d) flat-top PAM signal (s
T )
All above described processes refer only to the sampler. However the sampled signals are
discrete in time but their amplitude is still continuous. In order to have a full representation of a signal
in digital form, the signal has to be discrete in amplitude too. The amplitude of the sampled signal
can take on values from infinite number of possible amplitude levels in particular range. This infinite
number of possible amplitude has to be mapped to finite number of practically required amplitude
levels by mapping different ranges of amplitude levels to a set of allowed amplitude levels. This
requires the next block in ADC namely the quantizer.

60
4.6 Quantizing: Uniform Quantizing
The quantizing operation is illustrated in Figure 4.7 for the case of 32 8M levels.
001
010
011
101
110
111
Input voltage, s
a) M = 2B
0,5 1,5 2,5 3,5
000
100
-0,5-1,5-2,5-3,5 +0
-0
+1
+2
+3
-3
-2
-1
B=3, M=8
Output voltage, s
000010011011011011010001000101110110111111110
t
t
Line code
Clock pulses
c)
Code words
t
Sampling times
sT
b)
ˆ( ), ( ), ( )s t s t s t
Quantized PAM signal ˆ( )s t
Analog signal ( )s t
PAM signal ( )s t ( )sT
Fig. 4.7. Illustration of waveforms in a PCM system: (a) output-input characteristic of a quantizer, (b) analog signal,
flat-top PAM signal and quantized PAM signal waveforms, (c) PCM signal waveform
The quantizer discretizes the continuous amplitude of the sampled signal to discrete levels of
amplitude. The amplitudes of the samples are quatized by dividing the entire amplitude range into a
finite set of amplitude ranges and assigning the same amplitude value to all samples falling in a given
range. The action of value assumption to the particular sample is performed mainly using
mathematical rounding operation. Several types of quantizers – uniform, non-uniform (A-law
quantizer, µ-law quantizer), differential quantizer, etc. exist to fulfill the purpose. This quantizer is
uniform because all the quantizing levels on the s axis and quantizing ranges on the s axis are
distributed uniformly, i.e., all the quantizing steps are of equal size . PCM with this kind of
quantizer is called linear PCM. Since we are approximating the analog sample values by using a finite
number of levels ( 8M in this illustration), error is introduced into the recovered analog signal
because of the quantizing effect. The quantizing error samples ( )e n consists of the difference between
the analog signal samples at the sampler input ( )s n and the output signal samples of the quantizer
ˆ( )s n , i.e.,
ˆ( ) ( ) ( )e n s n s n .
Actually the quantizer output signal is quantized PAM signal. If rounding operation is used, the
maximum of the quantizing error is equal to one-half of the quantizer step size , i.e.,
( )2 2
e n
.
Due to this error recovered analog signal differs from the analog signal at the sampler input. It
is considered that recovered output signal is equal to the input signal plus quantizing error. If the
sampling frequency is minimal allowable, i.e. equal to Nyquist frequency ( max2s NF F F ), or
higher and there is no noise in communication channel between PCM signal formation and analog
signal reconstruction systems there will still be quantizing noise on the recovered analog waveform
due to this error. The output signal of quantizer is called quantized PAM signal.

61
As shown in many literature sources [35–38], under certain assumptions, the ratio of the
recovered analog average signal power to the average of quantizing noise power (signal-to-noise ratio
– SNR) is expressed as follows:
2
2
max
3 RMS
out
sSNR M
S
, (4.2)
where RMSs is the RMS value of the input analog signal, maxS is the peak design level of the quantizer.
Recalling that 2BM , we may express the last equation in decibels as
max, [dB] 6,02 4,77 20logout
RMS
SSNR B
s
, (4.3)
where B is the number of bits in PCM code word. The last equation, sometimes called the 6 dB rule,
discloses the essential feature of PCM: adding one bit to PCM word it is possible to obtain 6 dB
improvement in SNR. However, SNR depends on the signal level and when it decreases SNR drops
down. The maximal value of SNR is reached when the signal reaches the peak design level of the
quantizer. With overrun this level the quantizer begins to work as a limiter. Then the quantizing noise
level begins drastic to increase and SNR to decrease. This equation is valid for various types of input
signal waveforms and quantizer characteristics (uniform, nonuniform, etc.) and under the assumption
that there are no bit errors in received bit stream. Graphical illustration of SNR relations to signal
value and PCM code word bit number is presented in Figure 4.8.
-20 -16 -12 -8 -4 05
15
25
35
45
55, dBSNR
max20log / , dBRMSs S
4B
6B
8B
12 dB
12 dB
Fig. 4.8. SNR relation to signal value and PCM code word bit number
4.7 Encoding
The quantized signal has to be represented in some numeric form to get a digital representation,
i.e. PCM signal. PCM signal is obtained from the quantized PAM signal by encoding each quantized
sample value into digital word – code word [39]. The encoder is the next block in the ADC. Code
words are just some form of numeric representation that the encoder assigns to each discretized
amplitude level. Some of the convenient methods for one-to-one mapping of amplitude levels to code
words include: Natural Binary Coding and Gray Coding. In natural binary mapping the discrete
amplitude levels are coded in binary format. The exact code word that represents a particular
quantized level is chosen considering what code system will be employed in the next signal
processing stages.
Consider that the sampler has discretized the samples in time and the quantizer maps discretized
ranges of voltages to discrete amplitude levels. Binary code words of the encoder output are presented
in the first column of the following Table 4.1. The second, fourth and the sixth columns give three
possible interpretations of given code words. They are: signed magnitude or folded binary, 1’s
complement and 2’s complement form. The encoder just gives out the binary pattern and it is up to

62
the designer to decide how to interpret the binary pattern in order to represent quantization values.
The interpretation influences the quantizer ranges that will be mapped to specific values. Quantizer’s
design and encoder’s output interpretation always have to be implemented in parallel.
The three representations listed above can accommodate both positive and negative values. Out
of these three the fourth one unsigned integer representation can represent positive values only.
Table 4.1 Various interpretations of 3 bit code words
Code
words
Folded binary
form and
quantized
value in Volts
Quantization
range in Volts
for folded
binary form
1’s
complement
form and
quantized
value in Volts
Quantization
range in Volts
for 1’s
complement
form
2’s
complement
form and
quantized
value in Volts
Quantization
range in Volts
for 2’s
complement
form
1 2 3 4 5 6 7
011 +3 +2,5 – +3,5 +3 +2,5 – +3,5 +3 +2,5 – +3,5
010 +2 +1,5 – +2,5 +2 +1,5 – +2,5 +2 +1,5 – +2,5
001 +1 +0,5 – +1,5 +1 +0,5 – +1,5 +1 +0,5 – +1,5
000 +0 +0,0 – +0,5 +0 +0,0 – +0,5 0 -0,5 – +0,5
111 -3 -3,5 – -2,5 -0 -0,0 – -0,5 -1 -1,5 – -0,5
110 -2 -2,5 – -1,5 -1 -0,5 – -1,5 -2 -2,5 – -1,5
101 -1 -1,5 – -0,5 -2 -1,5 – -2,5 -3 -3,5 – -2,5
100 -0 -0,5 – -0,0 -2,5 – -3,5 -4 -4,5 – -3,5
In signed magnitude representation, also called Folded Binary Code / Fold over Binary Code,
the Most Significant Bit (MSB) of the binary pattern represents the sign of the number
(positive/negative) and the rest of the bits represent the magnitude. In 1’s complement representation,
the negative values are just the 1’s complement of positive values. To convert a binary representation
to 1’s complement, one just has to flip all the bits (1’s to 0’s and 0’s to 1’s). To convert to 2’s
complement form, convert the binary pattern to 1’s complement and then add ‘1’ to the resulting sum.
The designer can conveniently choose any of the above mentioned forms to interpret the binary
output of the encoder. For example, if the designer interprets it as 1’s complement or signed
magnitude representation, then he would have two different representations for the value ‘0’. All the
further calculations in DSP has to be done by keeping this fact in mind and this causes greater threat
to the reliability of design. To avoid this ambiguity, 2’s complement is always the good choice of
interpretation. Additionally two’s complement interpretation results in faster and simpler hardware.
But the two’s complement encoding represents not equal positive and negative voltage ranges (from
-4,5V to +3,5V having 3 bits quantizer). This fact also always must be kept in mind by further
calculations in DSP. In the case of signed magnitude and one’s complement encoding the ranges of
representable positive and negative voltages are equal (from -3,5V to +3,5V in the case of 3 bits
quantizer) but they result in ambiguity in representing 0V.
Gray code is another form of quantized signal representation. It is very popular and is used
almost in all applications. In Gray coding, the neighboring code words differ by only one bit. In this
case the minimal noise which is able to convert one symbol to the neighboring can harm only one bit.
On the contrary, when the neighboring code words differ more than by one bit, the same noise will
harm also more than one bit what results in increasing overall Bit Error Rate. It is possible even to
correct single bit errors when combining Gray coding with Forward Error Correction coding. Digital
modulation techniques like M-PSK and M-QAM use Gray codes to represent the modulation symbols
in baseband.
The following Table 4.2 illustrates relationship between natural binary code and Gray code for
3 bits code words.

63
Table 4.2 Natural binary and Gray 3 bits code words
Natural binary code
words
000 001 010 011 100 101 110 111
Gray code words 000 001 011 010 110 111 101 100
At the physical layer in electronic circuits code words are represented in the form of some kind
of line code. Often the form of unipolar non-return to zero (NRZ) code with rectangular pulse shaping
is used, i.e., the binary ones are represented by a high level (+A V) and a binary zeroes by a zero level
(see Figure 4.7, c).
4.8 Bandwidth of PCM Signals
The spectrum of the PCM signal is not directly related to the spectrum of the input signal. The
bandwidth of (serial) binary PCM waveforms depends on the bit rate R and the waveform line code
and pulse shape used to represent the data. The bit rate R is
sR BF , (4.4)
It is shown in many sources [35–38] that for no aliasing case ( max2sF F ) and only when
unipolar NRZ line code and sin /x x pulse shaping is used to generate the PCM waveform the
minimal bandwidth of PCM signal minPCMF is obtained.
min / 2 / 2PCM sF R BF . (4.5)
However, usually a more rectangular type of pulse shape is used, and consequently, the
bandwidth of PCM waveform will be larger than this minimum. There are some typical of waveforms
generated by popular integrated circuits. One of them is based on NRZ line code with practically
rectangular pulse shape. If rectangular pulse shaping is used, the absolute bandwidth is infinity.
Luckily the praxis of exploitation of PCM communication systems demonstrates that sufficient
behavior efficiency is reached when communicating over the channel with the first-null bandwidth.
For PCM waveform generated by rectangular pulses, the first-null bandwidth is
PCM sF R BF . (4.6)
The lower bound of the bandwidth of such PCM signal is
max2 2PCM LB NF BF BF B F , (4.7)
where maxF F is the bandwidth of the corresponding baseband analog signal. Thus, for in the
praxis used values of B, the bandwidth of the serial PCM signal will be significantly larger then
bandwidth of the corresponding analog signal which it represents.
In principle, for transmission of an analog baseband signal over the two-wire transmission line
channel only F , Hz bandwidth is needed. Using the simplest analog modulation, i.e., amplitude
modulation, the transmission radio channel bandwidth of 2 F , Hz will be sufficient. Whereas for
transmission of PCM signal version at least 2B F , Hz channel bandwidth is required.
Thus for transmission of PCM signal much wider communication channel is required in
comparison with other types of signal conveying the same information. This means that PCM signal
contains a lot of redundant information.
Examples The frequency components of an analog audio voice-frequency telephone signal occupy a band
approximately from 300 Hz to 3400 Hz. It means the analog telephone signal maximum frequency is
max 3,4kHzF and bandwidth 3,4 kHzAn SigF . For transmission over digital telephone system
this signal is to be converted to a PCM signal. Minimal sampling frequency (Nyquist frequency)

64
which could be used for sampling is equal to 2×3,4=6,8 kSa/s. Practically this sampling frequency is
never been used, because it is necessary to have some guard band for a finite width of the low pass
anti-aliasing filter frequency response. The steeper the slope the more sophisticated and more
expensive filter we have to use. Therefore the telephone signal usually is sampled with a sampling
frequency of 8 kSa/s. As a rule each sample value is represented by 8 bits. The bit rate of that binary
PCM signal will be
( , Sa/s) ( , bits/Sa) (8, kSa/s) (8, bits/Sa) 64 kbits/ss
R F B
If rectangular pulse shaping is used, the absolute bandwidth is infinity, but the first spectrum
null bandwidth is
1/PCM bF T R ,
where bT is the one bit transmission time, R – bit rate. In our case
64 kHzPCM
F .
Thus for transmission of pure PCM telephone signal the channel bandwidth of 64 kHz is
needed. From the other side, the transmission of the telephone signal analog version containing the
same information is possible over a channel with only 3,4 kHz bandwidth. Eventually using the
simplest analog modulation, for example, amplitude modulation, the transmission channel bandwidth
of 6,8 kHz will be sufficient.
In the following Table 4.3 we present some data of some PCM signals.
Table 4.3 Parameters of various PCM signals
Signal type 𝑭max 𝑭𝒔 B R S/N,
dB
∆𝑭
Telephone signal 3,4 kHz 8 kHz 8 64 kbit/s 38 (64÷128) kHz
Audio signal (mono) 20,0 kHz 48 kHz 16 768 kbit/s >90 (768÷1536) kHz
PAL TV luminance signal (Y) 5,0 MHz 13,5 MHz 8 108 Mbit/s(2) 48 (108÷216) MHz
PAL TV color-difference
signals (U,V)
2×2,5 MHz 2×6,75 MHz 2×8 108 Mbit/s(3) (108÷216) MHz
SDTV luminance signal (Y)(1) 13,5 MHz 8 108 Mbit/s(2) (108÷216) MHz
SDTV color-difference signals
(CB,CR)(1)
2×6,75 MHz 2×8 108 Mbit/s(3) (108÷216) MHz
HDTV luminance signal (Y)(4) 74,25 MHz 8 594 Mbit/s(5) (594÷1188) MHz
HDTV color-difference signals
(CB,CR)(4)
2×37,125 MHz 2×8 594 Mbit/s(6) (594÷1188) MHz
(1) In accordance with Recommendation ITU-R BT.601-7 „Studio encoding parameters of digital television for standard
4:3 and wide-screen 16:9 aspect ratios“; (2) For 625 lines, 25 Hz frame rate, 8 bits and 864 pixels per line; (3) For 625 lines, 25 Hz frame rate, 8 bits, 432 pixels per line and 2 color signals; (4) In accordance with Recommendation ITU-R BT.709-5 „Parameter values for the HDTV standards for production and
international program exchange“; (5) For 1125 lines, 25 Hz frame rate, 8 bits and 2640 samples per line; (6) For 1125 lines, 25 Hz frame rate, 8 bits, 1320 samples per line and 2 color signals;
4.9 Linear PCM Advantages and Disadvantages
Linear PCM encoding method is widely used in praxis, generally by systems operating with
uncompressed audio data: compact discs, digital telephony, HDMI, DVD, etc., because it has some
productive advantages. They are:

65
Relatively inexpensive digital circuitry may be used. Digital circuits are more reliable and can
be produced at lower cost than analog circuits. Also, digital hardware lends itself to more
flexible implementation than analog hardware. PCM signals derived from all types of analog sources may be merged together and with data
signals and transmitted over a common high-speed digital communication system.
In long-distance digital telephone systems requiring repeaters, a clean PCM waveform can be
regenerated at the output of each repeater, where the input consists of a noisy PCM waveform.
The shape of the waveform is affected by two mechanisms:
As all the transmission lines and circuits have some non-ideal transfer function, there is a
distorting effect on the ideal pulse.
Unwanted electrical noise or other interference further distorts the pulse waveform.
Both of these mechanisms cause the pulse shape to degrade as a function of distance. During
the time that the transmitted pulse can still be reliably identified, the pulse is thus regenerated.
The circuits that perform this function at regular intervals along a transmission system are called
regenerative repeaters.
The noise performance of a digital system can be superior to that of an analog system. In a
digital signal, there are two distinct states, on and off, and to mistake one for the other requires
a significant amount of noise. In the analog signal, there are a continuous number of states
representing the signal, and noise can cause each state to shift to an adjacent one. Therefore, a
PCM receiver will work perfectly under much higher noise levels than an analog one. This low
noise susceptibility allows PCM signals to transmit farther than analog signals without signal
degradation, information loss, and distortion.
The probability of error for the system output can be reduced even further by the use of
appropriate coding techniques. The digital signal allows the PCM system to perform additional
functions as well, because additional data can be added to the signal. Firstly, PCM systems send
what is known as a "checksum", which adds redundancy to the system by allowing the receiver
to check that the data it is receiving is not corrupt. In fact, the checksum is so effective that it is
nearly impossible for a receiver to incorrectly accept invalid data. If the receiver determines
that the data is invalid, it can hold the last position, it can ask the transmitter to repeat the last
data portion, it can correct the corrupted data portion using redundant information added during
encoding process.
A PCM signal can be modulated in such a way that only a specific decoder can make sense of
the underlying data. This is useful when the data being sent requires a level of security. The
transmitter and receiver each have circuitry that is analogous to a dictionary. This circuit maps
the binary pulse-codes to their definitions. When a pulse-code is received, the receiver looks up
the meaning in the dictionary. Anyone who intercepted the PCM signal would be left with
meaningless binary data.
A PCM waveform may be saved for later reproduction or playback. Since PCM data is digital
in origin, it can be stored using a computer or similar device. An example of a consumer device
that stores PCM data is the Digital Versatile Disc (DVD) technology. The audio portion of a
DVD movie is encoded using PCM with a sampling rate as high as 192 thousand samples per
second. This PCM stream can be piped directly to an amplifier using a digital audio cable,
where it is then decoded into an audible signal.
However linear PCM characterizes also with some inconsiderably significant disadvantages.
They are:
The wideness of the frequency band;
The sensitivity of SNR to the variations of the ratio max / RMSS s (see Figure 4.8). maxS and
equivalently RMSs vary a lot across sounds, speakers and environment. The variations could

66
reach more than 40 dB. As a result if we want to ensure the certain SNR for some dynamic
signal range, we have to choose the number of the code word bits considering the smallest
signal level. In this case even at a little bit major signal level we will have the better SNR, than
is required, what is equivalent to the over-sized number of code word bits. Therefore in most
cases uniform quantization is not cost effective in the sense of the number of code word bits.
The reason of all of this is the uniform distribution of quantization steps irrespective to the
probability density of signal levels. This will be explained in detail in the next paragraphs.
4.10 Digitization of Video Signals
4.10.1 Introduction
For a number of years, video professionals at television studios have been using various digital
formats, such as D1 (components) and D2 (composite), for recording and editing video signals. In
order to ease the interoperability of equipment and international program exchange, the former CCIR
(Comite Consultatif International des Radiocommunications), now called the ITU-R (International
Telecommunications Union Radiocommunication Sector), has standardized conditions of digitization
and interfacing of digital video signals in component form (Y, Cr, Cb, in 4:2:2 format) [20].
The main advantages of these digital formats are that they allow multiple copies to be made
without any degradation in quality, and the creation of special effects not otherwise possible in analog
format, and they simplify editing of all kinds, as well as permitting international exchange
independent of the broadcast standard to be used for diffusion (NTSC, PAL, SECAM, D2-MAC,
MPEG). However, the drawback is the very important bit rate, which makes these formats unsuitable
for transmission to the end user without prior signal compression.
For component video signals from a studio source, which can have a bandwidth of up to 6 MHz,
the CCIR prescribes a sampling frequency of Fs=13,5 MHz locked on the line frequency. This
frequency is independent of the scanning standard, and represents 864×Fh for 625-line systems and
858×Fh for 525-line systems. The number of active samples per line is 720 in both cases. In such a
line locked sampling system, samples are at the same fixed place on all lines in a frame, and also from
frame to frame, and so are situated on a rectangular grid. For this reason, this sampling method is
called orthogonal sampling, as opposed to other sampling schemes used for composite video sampling
(4×Fsc subcarrier locked sampling for instance).
The most economic method in terms of bit rate for video signal digitization seems to be to use
the composite signal as a source; however, the quality will be limited by its composite nature. Taking
into account the fact that 8 bits (corresponding to 256 quantization steps) is the minimum required
for a good signal to quantization noise ratio (Sv/Nq=59 dB), the bit rate required by this composite
digitization is 13,5×8=108 Mb/s, which is evidently too high even for advanced digital data
transmission systems with different multilevel modulation techniques (see Table 4.4).
Table 4.4 Modulation type and required bandwidth for transmission rate of 108 Mb/s
Modulation type Number of bits/Hz Required bandwidth
(MHz)
BPSK – binary phase shift keying 1 108
QPSK – quadrature phase shift keying 2 54
8-ary PSK – 8-ary phase shift keying 3 36
256-ary QAM – 256-ary quadrature amplitude
modulation
8 13,5
However, digitization of a composite signal has little advantage over its analog form for
production purposes (practically the only one is the possibility of multiple copies without

67
degradation). Therefore, this is not the preferred method for source signal digitization in broadcast
applications, as the composite signal is not very suitable for most signal manipulations (editing,
compression) or international exchanges.
4.10.2 Digitization formats
4.10.2.1 The 4:2:2 format
Recommendation ITU-R Recommendation BT.601 (formerly CCIR Rec.601) [20] defines
digitization parameters for video signals in component form based on a Y, Cb, Cr signals in 4:2:2
format (four Y samples for two Cb samples and two Cr samples) with 8 bits per sample (with a
provision for extension to 10 bits per sample). The sampling frequency is 13,5 MHz for luminance
and 6,75 MHz for chrominance, regardless of the standard of the input signal. This results in 720
active video samples per line for luminance, and 360 active samples per line for each chrominance.
The position of the chrominance samples corresponds to the odd samples of the luminance (see Figure
4.9).
Chrominance signals Cr and Cb being simultaneously available at every line, vertical resolution
for chrominance is the same as for luminance (480 lines for 525-line systems, 576 lines for 625-line
systems). The total bit rate resulting from this process is 13,5×8+2×6,75×8=216 Mb/s. With a
quantization of 10 bits, the bit rate becomes 270 Mb/s. However, if one takes into account the
redundancy involved in digitizing the inactive part of the video signal (horizontal and vertical
blanking periods), the useful bit rate goes down to 166 Mb/s with 8 bits per sample. These horizontal
and vertical blanking periods can be filled with other useful data, such as digital sound, sync, and
other information.
13,5
MHz
(74 ns)
6,75 MHz
(148 ns)
Luminance
Chrominance
Fig. 4.9. Position of samples in the 4:2:2 format
ITU-R Recommendation BT.656 (formerly CCIR-656) [40] defines standardized electrical
interfacing conditions for 4:2:2 signals digitized according to recommendation CCIR-601. This is the
format used for interfacing D1 digital video recorders, and is therefore sometimes referred to as the
D1 format.
The parallel version of this recommendation provides the signal in a multiplexed form (Crl, Y1,
Cb1, Y2, Cr3, Y3, Cb3…) on an 8-bit parallel interface, together with a 27 MHz clock (one clock period
per sample). Synchronization and other data are included in the data flow. The normalized connector
is a DB25 plug.
There is also a serial form of the CCIR-656 interface for transmission on a 75Ω coaxial cable
with BNC connectors, requiring a slightly higher bit rate (243 Mb/s) due to the use of 9 bits per
sample in this mode.
4.10.2.2 The 4:2:0 format
This format is obtained from the 4:2:2 format by using the same chroma samples for two
successive lines, in order to reduce the amount of memory required in processing circuitry while at
the same time giving a vertical resolution of the same order as the horizontal resolution. Luminance
and horizontal chrominance resolutions are the same as for the 4:2:2 format, and thus

68
luminance resolution: 720×576 (625 lines) or 720×480 (525 lines);
chrominance resolution: 360×288 (625 lines) or 360×240 (525 lines).
Figure 4.10 shows the position of samples in the 4:2:0 format.
13,5
MHz
(74 ns)
6,75 MHz
(148 ns)
Luminance
Chrominance
Fig. 4.10. Position of samples in the 4:2:0 format
In order to avoid the chrominance line flickering observed in SECAM at sharp horizontal
transients (due to the fact that one chrominance comes from the current line and the second comes
from the preceding one), Cb and Cr samples are obtained by interpolating 4:2:2 samples of the two
successive lines. Thus the color is determined by the level of previous and subsequent values.
The 4:2:0 format is of special importance as it is the input format for D2-MAC and MPEG-2
coding.
4.10.2.3 The source intermediate format (SIF)
This format is obtained by halving the spatial resolution in both directions as well as the
temporal resolution, which becomes 25 Hz for 625-line systems and 29,97 Hz for 525-line systems.
Depending on the originating standard, the spatial resolutions are then:
luminance resolution: 360×288 (625 lines) or 360×240 (525 lines);
chrominance resolution: 180×144 (625 lines) or 180×120 (525 lines).
Figure 4.11 illustrates the position of the samples in the SIF format. Horizontal resolution is
obtained by filtering and subsampling the input signal. The reduction in temporal and vertical
resolution is normally obtained by interpolating samples of the odd and even fields, but is sometimes
achieved by simply dropping every second field of the interlaced input format. The resolution
obtained is the base for MPEG-1 encoding, and is resulting in a so called "VHS-like" quality in terms
of resolution. This format is used in H.261 and H.264 standards. In this case, the image is encoded
using prediction, transformation and motion compensation.
13,5
MHz
(74 ns)
6,75 MHz
(148 ns)
Luminance
Chrominance
Discarded samples
Fig. 4.11. Position of samples in the SIF format
4.10.2.4 The common intermediate format (CIF)
This is a compromise between European and American SIF formats: spatial resolution is taken
from the 625-line SIF (360×288) and temporal resolution from the 525-line SIF (29,97 Hz). It is the
basis used for video conferencing.

69
4.10.2.5 The quarter CIF (QCIF)
Once again, this reduces the spatial resolution by 4 (2 in each direction) and the temporal
resolution by 2 or 4 (15 or 7,5 Hz). It is the input format used for ISDN video telephony using the
H261 compression algorithm.
4.10.2.6 High definition formats 720p, 1080i
Two standard picture formats have been chosen for broadcast HDTV applications, each existing
in two variants (59,94 Hz or 50 Hz depending on continent):
The 720p format: this is a progressive scan format with a horizontal resolution of 1280
pixels and a vertical resolution of 720 lines (or pixels).
The 1280i format: this interlaced format offers a horizontal resolution of 1920 pixels and
a vertical resolution of 1080 lines (or pixels).
For these two formats, the horizontal and vertical resolutions are equivalent (square pixels)
because they have the same ratio as the aspect ratio of the picture (16:9).
A quick calculation of the required bit rate for the digitization in 4:4:4 format of these two HD
formats gives bit rates on the order of 1 to 1,5 Gb/s depending on the frame rate and resolution, which
is 4 to 5 times greater than for standard definition interlaced video.
4.10.3 Transport problems
It is clear that a bit rate of the order of 200 Mb/s, as required by the 4:2:2 format, cannot be
used for direct broadcast to the end user, as it would occupy a bandwidth of the order of 40 MHz with
a 64-QAM modulation (6 bits/symbol) used for cable, or 135 MHz with a QPSK modulation
(2 bits/symbol) used for satellite. This would represent 5-6 times the bandwidth required for
transmission of an analog PAL or SECAM signal, and does not even take into account any error
correction algorithm. It would of course be even more unthinkable with the 4 to 5 times higher bit
rates generated by the digitization of high definition pictures in 720p or 1080i format.
Compression algorithms, however, have been in use for some years for contribution links in the
field of professional video, which reduce this bit rate to 34 Mb/s, but this is still too high for consumer
applications, as it does not give any advantage in terms of capacity over existing analog transmissions.
The problem of compression seemed not be solved at an early date. Therefore it was developed and
proposed some hybrid standards such as D2-MAC. However, the very rapid progress made in
compression techniques and IC technology in the second half of the 1980s made these systems
obsolete soon after their introduction.
The essential conditions required to start digital television broadcast services were the
development of technically and economically perspective solutions to problems which can be
classified into two main categories:
Source coding. This is the technical term for compression. It encompasses all video and
audio compression techniques used to reduce as much as possible the bit rate (in terms of
Mb/s required to transmit moving pictures of a given resolution and the associated sound)
with the lowest perceptible degradation in quality.
Channel coding. This consists of developing powerful error correction algorithms
associated with the most spectrally efficient modulation techniques (in terms of Mb/s per
MHz), taking into account the available bandwidth and the foreseeable imperfections of
the transmission channel.

70
5. SPEECH, AUDIO and VIDEO SIGNALS COMPRESSION by
QUANTIZATION
5.1 Necessity and possibility of compression
The only disadvantage of PCM – the wideness of the frequency band requiring enormously
wideband communication channel can be reduced by removing redundant information and for this
we must apply some kind of signal compression. From the other side the reduction of the bandwidth
is needed to transmit a given amount of data in a given time over communication channel with a given
bandwidth.
The main compression idea follows from the equation (4.6). It shows that reduction of
bandwidth is possible by reduction of bit-rate and that bit-rate reduction is closely related to the
number of bits in PCM code word because reduction of sampling frequency bellow the Nyquist
frequency isn’t possible due to the Nyquist criterion.
In electronics, computer science and information theory the terms signal compression, data
compression, source coding, or bit-rate reduction are synonyms and involves encoding information
using fewer bits than the original representation. Compression can be either lossy or lossless. Lossless
compression reduces bits by identifying and eliminating statistical redundancy. No information is lost
in lossless compression. Lossy compression reduces bits by identifying unnecessary information and
removing it. The process of reducing the size of a data file is popularly referred to as data
compression, although it’s formal name is source coding (coding done at the source of the data before
it is stored or transmitted).
Compression is useful because it helps reduce resources usage, such as data storage space or
transmission capacity. Because compressed data must be decompressed to use, this extra processing
imposes computational or other costs through decompression. Data compression is subject to a space-
time complexity trade-off. For instance, a compression scheme for video may require expensive
hardware for the video to be decompressed fast enough to be viewed as it is being decompressed, and
the option to decompress the video in full before watching it may be inconvenient or require additional
storage. The design of data compression schemes involves trade-offs among various factors,
including the degree of compression, the amount of distortion introduced (e.g., when using lossy data
compression), and the computational resources required to compress and uncompress the data.
Audio and video data compression has the potential to reduce the transmission bandwidth and
storage requirements of audio and video data.
5.2 Nonuniform quantizing: µ-law and A-law companding
The first step toward modern audio data compression technics was done in the early stage of
digital telephony development when nonuniform quantizing based on µ-law and A-law companding
was introduced. Already some time ago µ-law and A-law companding were used in analog telephony
for dynamic range compression [29, 31, 33, 35]. However transferring this technic to digital telephony
results in additional benefit, i.e., it enabled to save some bits in PCM code words in comparison with
uniform quantization not losing quality of speech signal at the same time.
The idea of nonuniform quantization is based on the desire to avoid the main disadvantage of
the uniform quantization – SNR dependence on the input signal level caused by uniform distribution
of quantization steps. Nonuniform quantizers attempt to match the distribution of quatization levels
to that of the probability density of the input speech signal by allocating more quatization levels in
regions of high probability and fewer levels in regions where the probability is low. This idea is
directly confirmed by the fact that analog voice signals are more likely to have amplitude values near
zero than at the allowed extreme peak values. This is illustrated in Figure 5.1 showing some
approximations of analog voice signal probability density function (pdf) [47].

71
0,2
0,4
0,6
0,8
1,0
-6 -4 -2 0 2 4 6
Laplace distribution
(music)
Gamma distribution
(telephone voice)Experimental
distribution
s
p(s)
Fig. 5.1. Approximations of voice analog signal probability density function (experimental measurement values are
labeled by dots)
Gamma distribution - 33
( ) exp8 2s s
sp s
s
, Laplace distribution - 21
( ) exp2 ss
sp s
,
where ( )p s is probability density function and s is standard deviation of a signal s
Independence of SNR on the signal level results in a constant percentage quantization error in
contrast to a constant absolute quantization error independent of signal amplitude as for uniform
quantization.
As theory shows [31, 33], with the intention of getting a constant percentage error we have to
space the quantization levels logarithmically. However, such spacing may be impractical because it
is impossible to get enormous output signal levels when input signal levels are very small as
logarithmic characteristic requires (0
ln( )s
s
). Some practical approximations to a logarithmic
compression characteristic have been proposed. They are: µ-law characteristic and A-law
characteristic [31, 33]. µ-law characteristic was implemented in USA and Japan and A-law
characteristic in European telephone systems. Equation describing A-law characteristic is
max
max
max
max
( ) / ( ) 1, 0 ;
1 ln( ) F[ ( )]
1 ln ( ) / 1 ( ), 1.
1 ln
As n S s n
A S Aw n s n
As n S s n
A A S
(5.1)
Here ( )s n is input signal samples, ( )w n - output signal samples, A – the parameter which standard
value is stand 87,56A . Figure 5.2 shows a family of curves of ( )w n versus ( )s n for different values
of A. Distribution of quantization levels for an A-law 3-bit quantizer with stand 87,56A A are
shown in Figure 5.3.

72
maxS
( )s n
( ) { ( )}w n F s n
maxS
0
87,56A
60
30
15
5
maxS
( )s n
ˆ( )s n
maxS
0
87,56A
1s 2s
3s
1s
2s
3s
4s
4s
Fig. 5.2. Input-output relations for an A-law
characteristic
Fig. 5.3. Distribution of quantization levels for the A-law
3-bit quantizer with stand 87,56A A
It is clear that using the function of equation (5.1) avoids the problem of small input amplitudes
since ( ) 0w n when ( ) 0s n . For small values of ( )s n ( max0 ( ) / 1 /s n S A ) Equation (5.1)
reduces to
max
( ) ( )(1 ln )
Aw n s n
S A
, (5.2)
i.e., the quantization levels are uniformly spaced. However, for large ( )s n ( max1/ ( ) / 1A s n S )
we have
maxln ln ln ( )( )
1 ln
A S s nw n
A
,
i.e., the quantization levels are logarithmically spaced what guarantees constant percentage error. In
this range of input signal levels SNR is expressed as
, [dB] 6,02 4,77 20lg(1 ln )SNR B A ,
what gives with stand 87,56A A
, [dB] 6,02 9,99SNR B .
Notice that the output SNR is relatively insensitive to the input level, as shown in Figure 4.
Moreover under the week input signal A-law companding results in a better SNR than uniform
quantization but under the strong input signal uniform quantization is superior to nonuniform with A-
law companding.
Investigations of speech signal quality [31, 33] show that approximately the same quality is
reached with 11-bit uniform quantization and 8-bit nonuniform quantization (A-law companding),
i.e., A-law companding allows us to save approximately 3 bits and sometimes even more, nearly 4
bits.
Regardless the above mentioned merits the quasi-logarithmic quantization characterizes with
some negative properties. First, the SNR depends on the variations of the signal level when signals
are week. Second, in the range of strong signals the constancy of SNR is achieved at the expense of
the SNR reduction in comparison with SNR of uniform quantization with the same number of bits
(see Figure 5.4). Third, the quasi-logarithmic quantization supposes the non-linear amplification.
Thus, even at very small levels of input signal the quasi-logarithmic characteristic yields decreasing
of relative level of output signal, what is completely undesirable phenomenon.

73
-20 -16 -12 -8 -4 05
15
25
35
45
55, dBSNR
max20log / , dBRMSs S
-24-28-32-36-40
A-law companding
A=87,56
No companding
(uniform quantization)
Fig. 5.4. Output SNR versus input signal level of 8-bit PCM systems with and without companding
In practice, the smooth nonlinear characteristic of A-law is approximated by piecewise linear 7
chords covering 8 segments (one chord for the 1st and the 2nd segments) as shown in Figure 5.5. In
turn, each chord is approximated by uniformly spaced 16 steps as by uniform quantization. An input
step size of each chord is set by the particular segment number. That is, 16 steps of wide Δ are used
for segment 1 and 2. For segment 3 are used 16 steps of width 2Δ, for segment 4 – 16 steps of width
4Δ, for segment 5 – 16 steps of width 8Δ and so on… and for the last one - the 8th segment – 16 steps
of width 64Δ. As shown in Figure 5.6, each 8-bit PCM code word consists of a sign bit which denotes
a positive or negative input voltage (1 for positive voltage, 0 for negative voltage), three chord bits
which represent the segment number, and four step bits which represent the particular step within the
segment.
1
7/8
6/8
5/8
4/8
3/8
2/8
1/8
0 1/8 1/4 1/2 11/161/321/64
16 steps
8th segment
16
32
48
64
80
96
112
128
16 steps
ˆnorms
norms
7th segment
6th
seg
men
t
5th
seg
men
t
Code
words
11010000
11011111
Segment 6
16
1 2 3 4 5 6 7 8
Step bits (number
of quantizing
interval )
Chord bits
(segment
number)Sign bit
Fig. 5.5 Practical approximation of A-law characteristic Fig. 5.6. PCM code word structure

74
5.3 Adaptive Quantization
5.3.1 Maximum SNR coding
The nonuniform (A-law) quantizer attempts to achieve constant SNR over the wide range of
signal levels usually expressed in logarithmic power units (dB). However, this is achieved at some
offering over the SNR performance that could be achieved if the quantizer step size was matched to
the signal power. This supposes an idea to choose the quantizer levels so as to minimize the
quantization error power, and thus, maximize the SNR, if the signal power is known. Detailed analysis
shows this method additionally leads to the matching signal quantization intervals to probability
distribution. The attempts were made to adapt here model probability distributions – Gaussian,
Gamma or Laplacian. The method was called maximum (or optimum) SNR coding [47]. Although
this kind of quantizers yield minimum mean squared error when matched to the power and amplitude
distribution of the signal, the non-stationary nature of the speech leads to non-satisfactory results.
Therefore this method remains interesting – at least theoretically.
5.3.2 Adaptation principle
Hence, quantization dilemma of speech signals remains. From one side it would be desirable to
choose quantization steps as small as possible so as to minimize the quantization noise. From the
other side the number of steps has to be limited because it is directly related to the number of code
words bits. Therefore the steps have to be large enough so as to accommodate the maximum peak-to-
peak range of the signal. The non-stationary speech attribution complicates this problem greatly.
Fixed quantizers (uniform and nonuniform) may yield good SNR but only when we assume that signal
is stationary. But this cannot be done in practical cases where signal is not stationary and is
fluctuating.
One of solutions proposed [48] is to adapt the properties of the quantizer to the level of the
input signal. The second one is to adapt the signal level to the fixed properties of the quantizer. The
idea of the first solution is illustrated in Figure 5.7.
)(nc( )s n ˆ( )s n
)(n
)(nc ˆ ( )s n
)(n
DecoderEncoder Q
Fig. 5.7. Block diagram representation of adaptive quantization with variable step size
The essence of this solution is to vary quantization step size ∆(𝑛) to match the input signal
power. This could be achieved by keeping instantaneous step size ∆(𝑛) proportional to square root
of input signal power √𝑃𝑠. In the case of nonuniform quantizer, this would imply that the quantization
levels and ranges would be linearly scaled to match the signal power Ps.
The second solution is illustrated in Figure 5.8.
( )s n ( )w n ˆ ( )w n )(nc ( )c n ˆ ( )w n ˆ ( )s n
( )G n
( )G n
Encoder Q Decoder
( ) ( ) ( )w n s n G n
ˆ ( )ˆ ( )
( )
w ns n
G n
Fig. 5.8. Block diagram representation of adaptive quantization with variable gain

75
Here variable gain 𝐺(𝑛) is used, followed by a fixed quantizer step size Δ in the case of uniform
quantizer and quasi-logarithmically spaced step sizes Δ in the case of nonuniform quantizer. The gain
𝐺(𝑛) has to be varied to the end to keep signal power of ( ) ( ) ( )w n s n G n relatively constant. 𝐺(𝑛)
has to be proportional to 1/√𝑃𝑠 (or 1/𝑠𝑅𝑀𝑆), to give 𝑃𝑤 ≈ constant. Notice that the square root of
the normalized signal power is the signal root-mean-square (RMS) value.
The reliable estimation of signal power Ps is needed for both types of adaptive quantization.
Moreover, besides transmission of coded useful information 𝑐(𝑛) the transmission of supplementary
information about quantization step size ∆(𝑛) or gain 𝐺(𝑛) is compulsory. This increases the amount
of transmitting information and requires channel with increased capacity.
5.3.3 Types of adaptation
Time varying properties of speech signals indicate their dual character. The amplitude changes
rapidly from sample to sample or within a few samples. These are instantaneous changes. Meanwhile
the peak amplitude remains essentially unchanged for relatively long time intervals, for example 10
to 20 milliseconds, corresponding to the duration of pronunciation of syllables. These are syllabic
variations.
Speaking about adaptive quantization it is necessary to make difference between rapid or
instantaneous adaptation and slow or syllabic adaptation.
Another difference among adaptive quantization schemes is to be made in compliance with the
way in which the control signals are estimated. In one case they are estimated from the input signal.
These schemes are called feed-forward adaptive quantizers. In the another case the control signals
are estimated from the output signal of quantizer ˆ( )s n or from the output code words ( )c n . These
are called feed-back quantizers.
5.3.4 Feed-forward adaptation
The general block diagrams of feed-forward adaptation systems with time varying step size and
with time varying gain are presented in Figures 5.9 and 5.10 respectively.
ˆ( )s n )(nc( )s n
( )n
Encoder Q
Step size
adaptation
system
)(nc ˆ ( )s n
)(n
Decoder
( )n
Fig. 5.9. Block diagram of feed-forward adaptive quantizer with time varying step size
Most systems of this type attempt to obtain an estimate of the time-varying input signal power
sP . Then, the step size or quantization levels are made proportional to the RMS value of input signal
RMSs , or the gain applied to the input can be made inversely proportional to the RMS value of input
signal, i.e. proportional to 1 / RMSs . The step size in Figure 5.8 would therefore be of the form
ˆ ( )s n)(nc ˆ ( )w n
)(nG
Decoder ˆ ( )w n( )w n
)(nc( )s n
( )G n
Encoder Q
Gain
adaptation
system
( )G n
Fig. 5.10. Block diagram of feed-forward quantizer with time varying gain

76
0( ) ( )RMSn s n (5.3)
and the time varying gain in Figure 9 would be of the form
0( ) / ( )RMSG n G s n , (5.4)
where 0 and 0G are some constants. Practically it is impossible to realize the gain or step size of
any value. Therefore it is common to limit the variations of the gain or the step size in the form
min max( )G G n G ,
min max( )n .
The ratio of these limits determines the dynamic range of the system. To obtain a relatively
constant SNR over a dynamic range of 40 dB, requires
max min/ 100G G ,
max min/ 100 .
The RMS value of the input signal could be estimated in some different ways. Scientific
definition of the RMS value of the analog input signal would be
/2
2
/2
1lim ( )
T
RMST
T
s s t dtT
.
However practical estimations differ from this definition because operations of limit and
integration could be realized only approximately. A common practical approach is
2( ) ( ) ( )RMS
m
s n s m h n m
, (5.5)
where ( )h n is the impulse response of the low pass filter. In one of the simplest cases
1, 1;
( )0, 1.
n nh n
n
(5.6)
Here is a constant which values have to be in the range 0 1 . The value of controls the
effective interval that strongly influences the estimate of RMSs , and herewith the ultimate quantization
results. In some sense this kind of low pass filtering is equivalent to the weighted addition of squared
signal samples where past samples have major weights than current ones. For illustrative purposes
we present Figure 5.11 with some audio signal examples at different points of feed-forward adaptive
quantization systems. For calculation of RMS value the equations (5.5 and 5.6) were employed.

77
0 1 2 3 4 5 6 7
x 104
0
1
2
n
s(n)
sRMS(n)|α=0,9
a)
0 1 2 3 4 5 6 7
x 104
-0,5
0
0,5
1
1,5
2
2,5
3
3,5
4
n
s(n)
sRMS(n)|α=0,99
g)
1,9 1,95 2 2,05 2,1 2,15 2,2 2,25 2,3 2,35
x 104
-0,5
0
0,5
1
1,5
2
n
s(n)
sRMS(n)|α=0,9
b)
1,9 1,95 2 2,05 2,1 2,15 2,2 2,25 2,3 2,35
x 104
-0,5
0
0,5
1
1,5
2
2,5
3
3,5
4
n
s(n)
sRMS(n)|α=0,99
h)
2,25 2,26 2,27 2,28 2,29 2,3
x 104
-0,5
0
0,5
1
1,5
2
n
s(n)
sRMS(n)|α=0,9
c)
2,25 2,26 2,27 2,28 2,29 2,3
x 104
-0,5
0
0,5
1
1,5
2
2,5
3
3,5
n
s(n)
sRMS(n)|α=0,99
i)

78
0 1 2 3 4 5 6 7
x 104
-0,5
0
0,5
1
1,5
n
w(n)|α=0,9
wRMS(n)|α=0,9
d)
0 1 2 3 4 5 6 7
x 104
-0.2
0
0.2
0.4
0.6
0.8
n
w(n)|α=0,99
wRMS(n)|α=0,9
j)
1,9 1,95 2 2,05 2,1 2,15 2,2 2,25 2,3 2,35
x 104
-0,5
0
0,5
1
n
w(n)|α=0,9
wRMS(n)|α=0,9
e)
1,9 1,95 2 2,05 2,1 2,15 2,2 2,25 2,3 2,35
x 104
-0,3
-0,2
-0,1
0
0,1
0,2
0,3
0,4
0,5
0,6
0,7
n
w(n)|α=0,99
wRMS(n)|α=0,9
k)
2,25 2,26 2,27 2,28 2,29 2,3
x 104
-0,5
0
0,5
1
1,5
n
w(n)|α=0,9
wRMS(n)|α=0,9
f)
2,25 2,26 2,27 2,28 2,29 2,3
x 104
-0,3
-0,2
-0,1
0
0,1
0,2
0,3
0,4
0,5
0,6
0,7
n
w(n)|α=0,99
wRMS(n)|α=0,9
l)
Fig. 5.11. Examples of the RMS value estimates (red lines) using equations (5.5, 5.6) and corresponding signal
waveforms (black lines); (a) waveform s(n) and RMS value estimate sRMS(n) for α=0,9, (b); (c) detailed
fragments of (a), (d) waveform w(n) and RMS value estimate wRMS(n) for α=0,9 , (e), (f) detailed fragments
of (d), (g) waveform s(n) and RMS value estimate sRMS(n) for α=0,99, (h), (i) detailed fragments of (g), (j)
waveform w(n) and RMS value estimate wRMS(n) for α=0,99, (k), (l) detailed fragments of (j)

79
Figures 5.11 a, b and c show the RMS value estimates (red lines) together with the input signal
waveforms (black lines) for the case α=0,9. Figures 5.11 d, e and f represent the waveforms of the
product ( ) ( ) ( )w n s n G n (black lines) and their RMS values estimates (red lines) for the same case
of α. The waveforms ( )s n , ( )w n and their RMS values estimates in the case α=0,99 are presented in
Figures 5.11 g – l. For the case α=0,9 system reaction to changes in the input signal amplitude is more
rapid. Therefore, despite some relatively quick variations of the product ( ) ( ) ( )w n s n G n RMS value,
it’s average remains nearly constant. All signal ( )s n amplitude dips are almost entirely compensated
by the time varying gain included deep drop in the samples region from 2,25∙104 – 2,3∙104.
Conversely, the system with α=0,99 responds much slowly and not all signal amplitude dips are
properly compensated. This is very clearly seen in the region 2,25∙104 – 2,3∙104.
In the case α=0,9 the corresponding time constant is about 100 samples (12 msec at an 8 kHz
sampling frequency) and in the case α=0,99 – about 9 samples (1 msec at 8 kHz). It means that the
system with α=0,9 could be assigned to instantaneous systems and the system with α=0,99 – to
syllabic systems.
It must be noted additionally that the gain ( )G n and the step size ( )n are slowly varying
functions comparing with the input signal amplitude variations. Therefore the sampling rate of ( )G n
and ( )n are much less than of the original signal. However it depends on the value of α. It is very
important because the information rate of the digital representation is the sum of the quantizer output
information rate and the gain or step size function information rate.
The RMS value estimate in the form square-root of moving average of squared input signal has
been proposed in [49]. That is
1
2
0
1( ) ( )
M
RMSm
s n x n mM
. (5.7)
The main operation in the RMS value determination according to this equation is addition of
the squared future input samples that are to be quantized. Therefore for the system realization the
buffer of M samples is needed. Notice that all weights of the summed samples are the same and equal
to 1/M, contrary to the previous case.
The algorithm of ( )RMSs n calculation could be expressed in terms of digital filtering, namely
1
2
0
( ) ( ) ( )M
RMSm
s n x m h n m
, (5.8)
where filter’s impulse response ( )h n is
1 / , 0;
( )0, .
M M nh n
otherwise
(5.9)
This filter is noncausal since the future input samples would not be available. To implement
this noncausal filter we have to delay the output, i.e., to buffer the input by M samples.
Results of investigation of this system are presented in Figure 5.12. Two system operation
modes were used in these experiments: one – with 𝑀 = 8 and the second – with 𝑀 = 128. This
corresponds to the time intervals of 1 msec and of 16 msec at an 8 kHz sampling frequency. The
system compensates all variations of the input signal level quite effectively even deep drop in the
region of 2,25∙104 – 2,3∙104 samples. Since the reaction of the system with 𝑀 = 8 is more rapid it
compensates the rapid changes in signal amplitude better as the system with 𝑀 = 128. However the
gain ( )G n or the step size ( )n changes more quickly as well, what determines the major information
flow rate of the system. Usually the gain or step size is evaluated and transmitted every M samples.

80
0,6
0 1 2 3 4 5 6 7
x 104
-0,6
-0,4
-0,2
0
0,2
0,4
n
s(n)
sRMS(n)|M=8
a)
1 2 3 4 5 6 7
x 104
-0,6
-0,4
-0,2
0
0,2
0,4
0,6
n
s(n)
sRMS(n)|M=128
g)
1,9 1,95 2 2,05 2,1 2,15 2,2 2,25 2,3
x 104
-0,6
-0,4
-0,2
0
0,2
0,4
0,6
0,8
n
s(n)
sRMS(n)|M=8
b)
1,9 1,95 2 2,05 2,1 2,15 2,2 2,25 2,3
x 104
-0,6
-0,4
-0,2
0
0,2
0,4
0,6
n
sRMS(n)|M=128
s(n)
h)
2,25 2,26 2,27 2,28 2,29 2,3
x 104
-0,6
-0,4
-0,2
0
0,2
0,4
0,6
0,8
n
s(n)
sRMS(n)|M=8
c)
2,25 2,26 2,27 2,28 2,29 2,3
x 104
-0,6
-0,4
-0,2
0
0,2
0,4
0,6
n
sRMS(n)|M=128
i)

81
w(n)|M=8
0 1 2 3 4 5 6 7
x 104
-2
-1
0
1
2
3
n
wRMS(n)|M=8
d)
n
0 1 2 3 4 5 6 7
x 104
-4
-3
-2
-1
0
1
2
3
4
wRMS(n)|M=128
w(n)|M=128
j)
1,9 1,95 2 2,05 2,1 2,15 2,2 2,25 2,3
x 104
-2,5
-2
-1,5
-1
-0,5
0
0,5
1
1,5
2
2,5
w(n)|M=8
wRMS(n)|M=8
n e)
wRMS(n)|M=128
w(n)|M=128
1,9 1,95 2 2,05 2,1 2,15 2,2 2,25 2,3
x 104
-4
-3
-2
-1
0
1
2
3
4
n k)
n
2,25 2,26 2,27 2,28 2,29 2,3
x 104
-2,5
-2
-1,5
-1
-0,5
0
0,5
1
1,5
2
2,5
w(n)|M=8
wRMS(n)|M=8
f)
2,25 2,26 2,27 2,28 2,29 2,3
x 104
-4
-3
-2
-1
0
1
2
3
4
n
w(n)|M=128
wRMS(n)|M=128
l)
Fig. 5.12. Examples of the RMS value estimates (red lines) using equations (5.8, 5.9) and corresponding signal
waveforms (black lines); (a) waveform s(n) and RMS value estimate sRMS(n) for M=8, (b); (c) detailed
fragments of (a), (d) waveform w(n) and RMS value estimate wRMS(n) for M=8 , (e), (f) detailed fragments
of (d), (g) waveform s(n) and RMS value estimate sRMS(n) for M=128, (h), (i) detailed fragments of (g), (j)
waveform w(n) and RMS value estimate wRMS(n) for M=128, (k), (l) detailed fragments of (j)

82
Many authors [31, 33, 48] investigated feed-forward adaptive quantization. The comprehensive
comparative study has been done by Noll [49]. He used the second type of RMS value estimation
with 𝑀 = 128 and 𝑀 = 1024 . The obtained results show that 3 bit adaptive quantizer achieves up
to 8 dB better SNR than fixed nonuniform quantizer, of course depending on speech material.
According to 6 dB rule this means that adaptive quantizer permits to save approximately up to 1 bit.
5.3.5 Feed-backward adaptation
Another type of adaptive quantizers is presented in Figures 5.13 and 5.14. Here the RMS value
of the input signal is estimated from the quantizer output signal or equivalently from the output code
words.
Decoder
'( )c n ( )s n
'( )n
Encoder
( )s n ˆ( )s n )(nc
)(n
Q
Step size
adaptation
system
Step size
adaptation
system
Fig. 5.13. Block diagram of feed-backward adaptive quantizer with time varying step size
In these systems, as in the case of feed-forward systems, the step size ( )n and gain ( )G n are
proportional and inverse proportional respectively to an estimate of RMS value of the input signal as
is denoted in equations (5.3, 5.4). There is no need to transmit the information about step size and the
gain. There is possible to extract it from the code words sequence. That is not questionable advantage
of this type of systems.
Usually for RMS value estimation the same equation (5.5) is applied. Only instead of input
samples the output samples are used, i.e.,
2ˆ( ) ( ) ( )RMS
m
s n s m h n m
. (5.10)
However the computational situation in this case is different. It is impossible to realize the
noncausal filter as the present value and the more the future values of ˆ( )s n are not available until the
quantization has occurred, which in turn could be performed after the RMS value has been estimated.
Therefore it is possible to use a low pass filter with impulse response expressed by equation (5.6) or
a causal moving average filter with impulse response
1 / , 1 ;
( )0, .
M n Mh n
otherwise
(5.11)
That leads to the equation
2
0
1( ) ( )
m M
RMSm
s n x n mM
. (5.12)
Gain
adaptation
system
Decoder
( )s n'( )c n
'( )G n
ˆ ( )w n( )s n ( )w n ˆ ( )w n )(nc
Gain
adaptation
system
Q Encoder
( )G n
Fig. 5.14. Block diagram of feed-backward adaptive quantizer with time varying gain

83
The results of the studies of this system were announced in [49]. It was found that using very
short window lengths (e.g., M=2) only 12 dB SNR for 3 bit quantizer was achieved. Larger values of
M permit to obtain only slightly better results.
Another approach [50] was applied to the system based on the block diagram presented in
Figure (5.13). The step size of a uniform quantizer was adapted at each sample time by the equation
( ) ( 1)n R n . (5.13)
Here R is the step size multiplier and depends only on the absolute value of the previous code word
( 1)c n . The multiplier choosing principle could be described as follows. If the previous code word
represents the largest positive or negative quantizer value, it means that quantizer is overloaded and
the step size is too small. In the next step it must be increased by choosing multiplier greater than
one. If the previous code word represents the smallest positive or negative quantizer value, the step
size must be decreased by choosing multiplier less than one. Similarly thinking the multipliers must
be chosen for all possible 2B code words of B-bit quantizer. Jayant [50] obtained empirical values of
multipliers for speech following by the mean squared quantization error criterion. They are presented
in the next Table 5.1.
Table 5.1 Step size multipliers for adaptive feed-backward quantization of speech signals
Step
number
B
1
2
3
4
5
6
7
8
2 0,6 2,2
3 0,85 1,0 1,0 1,5
4 0,8 0,8 0,8 0,8 1,2 1,6 2,0 2,4
However various experiments show that different multipliers can produce comparable results.
This means that the values of multipliers are not particularly critical.
In conclusion we present the quantization results for German sentence “Das hohe Grass ist
schon vergilbt” („The high grass has already turned yellow”) using various above analyzed
quantizers. Table 5.2 shows the average SNR for various quantizers.
Table 5.2 Signal-to-noise ratios using various quantizers with B=4 for the same speech material
Quantizer Uniform A-law µ-law Optimum Feed-forward Feed-backward
SNR 7,44 13,71 13,43 16,53 16,73 19,88
The nonuniform quantizers give comparable results, still much better as uniform quantizer. The
best result is achieved with feed-backward adaptation quantizer.
5.4 Differential quantization
Figure 5.15 shows an example of autocorrelation function estimate for speech signal.

84
0
0,2
0,4
0,6
0,8
1,0
4 8 12 18 20
r( m)
6 10 14 162-0,2
-0,4
-0,6
-0,8
m
Fig. 5.15. Autocorrelation function estimate for speech signal
It is clearly seen that there is considerable correlation between adjacent speech samples, and
the correlation is significant even between samples that are several sampling intervals apart. The
meaning of this high correlation is that, in an average sense, the signal properties do not change
rapidly from sample to sample so that the difference between adjacent samples should have a lower
variance than the variance of the signal itself. This can be easily verified analytically. This fact
provides the motivation for the general differential quantization scheme presented in Figure 5.16
[31, 33, 48, 51].
)(ˆ nd )(nc ˆ ( )s n
( )s n
Decoder
P
( )s n
( )s n ˆ( )s n
)(ˆ nd )(nc)(ndEncoder Q
P
Fig. 5.16. General block diagram of differential quantizer
In this system the input to the quantizer is a signal
( ) ( ) ( )d n s n s n (5.14)
which is the difference between the unquantized input sample, x(n), and an estimate, or prediction, of
the input sample which is denoted ( )s n . This predicted value is the output of a predictor system P,
whose input is, as we will see bellow, a quantized version of the input signal, s(n). The difference
signal may also be called the prediction error signal, since it is the amount by which the predictor
fails to exactly predict the input. Temporarily leaving aside the question of how the estimate, ( )s n ,
is obtained, we note that it is the difference signal that is quantized rather than the input. The quantizer
could be either fixed or adaptive, uniform or nonuniform, but in any case, its parameters should be
adjusted to match the variance of d(n). The quantized difference signal can be represented as
ˆ( ) ( ) ( )d n d n e n (5.15)
where e(n) is the quantization error. According to Figure 5.16 the quantized difference signal is added
to the predicted value ( )s n to produce a quantized version of the input, i.e.,
ˆˆ '( ) ( ) ( )s n s n d n . (5.16)
Substituting equations (5.14) and (5.15) into equation (5.16) we see that
ˆ( ) ( ) ( )s n s n e n . (5.17)
That is, independent of the properties of the predictor system P, the quantized speech sample
differs from the input only by the quantization error of the difference signal. Thus, if the prediction
is good, the variance of d(n) will be smaller than the variance of s(n). So that a quantizer with a given
number of levels can be adjusted to give a smaller quantization error, than would be possible, when
quantizing the input signal directly.

85
It should be noted that it is the quantized difference signal that is coded for transmission or
storage. The system for reconstructing the quantized input from the code words is implicit in
Figure 5.16. This system, presented in Figure 5.16 involves a decoder to reconstruct the quantized
difference signal from which the quantized input is reconstructed using the same predictor as used in
Figure 5.16. Clearly, if ( )c n is identical to c(n) then ˆ ˆ( ) ( )s n s n , which differs from s(n) only by
the quantization error incurred in quantizing d(n). The signal-to-quantizing noise ratio of the system
is, by definition,
2 2
2 2
[ ( )]
[ ( )]
s s
e e
s n PSNR
e n P
M
M (5.18)
which can be written as
s dP Q
d e
P PSNR G SNR
P P (5.19)
where
/Q d eSNR P P (5.20)
is the signal-to-quantizing noise ratio of the quantizer, and the quantity
/P s dG P P (5.21)
is defined as the gain due to the differential configuration.
The quantity QSNR is dependent upon the particular quantizer that is used, and, given
knowledge of the properties of d(n), QSNR can be maximized by using the techniques of the previous
sections. The quantity GP, if greater than unity, represents the gain in SNR that is due to the
differential scheme. Clearly, our objective should be to maximize GP by appropriate choice of the
predictor system P. For a given signal, Ps is a fixed quantity so that GP can be maximized by
minimizing the denominator of equation (5.21), i.e., by minimizing the variance of the prediction
error. To proceed, we need to specify the nature of the predictor P. One approach that is well
motivated by our previous discussion of the model for speech production (see paragraph 3.7) and by
the fact that it leads to tractable mathematics is to use a linear predictor (see chapter 7).
As will be described later in the section 7.3, using only the simplest first order linear predictor
with correctly chosen its parameter 1 it is possible theoretically to achieve the value of coefficient
11P PG G
in the range 2,43dB 7,21dB . The same show experimental results performed with real
speech signals [31, 33]. Speaking about differential quantization this means that with the simplest
first order predictor it is possible to realize about 6 dB improvement in SNR. This is of course
equivalent to adding an extra bit to the quantizer. Improvement in SNR increases with increasing
predictor’s order. Initially, the increasing is sufficiently sharp. However it slows at 6-8 dB value
which is reaching with the 2nd-4th predictor’s order. Further improvement’s increasing is less effective
and there is no case that it reaches 12 dB value. Maximum effective predictor’s order is 10-14.
Alternatively, while keeping the same SNR, differential quantization permits a reduction in bit
rate. The price paid is increased complexity of the quantization system.
5.5 Vector quantization
Two types of quantization techniques exist. They are scalar quantization and vector
quantization. Scalar quantization deals with sample quantization on a sample by sample basis. These
are: uniform, nonuniform, optimum, adaptive, analyzed above, and others. Vector quantization deals
with quantizing the samples in groups called vectors [52]. Vector quantization increases the
optimality of a quantizer at a cost of increased computational complexity and memory requirements.
By all above analyzed quantization schemes the single sample values of some signal or it’s
parameter were used replacing them by quantized values. It has sense this technique to generalize. It

86
is possible m single values (e.g., successive values) s1, s2, s3,…, sm to integrate into m-dimensional
vector
1 2 3( , , ,..., )T
ms s s ss
and to assign to one of L possible m-dimensional “quantization cells”, and to replace by belonging to
selected cell representative vector
1 2 3ˆ ˆ ˆ ˆ ˆ( , , ,..., )T
ms s s ss .
This is the essence of vector quantization (VQ).
The suitable cell to which a vector s has to be assigned (according to chosen criterion) will be
denoted by index i in the future. All representative code vectors are located in so called codebook.
The particular representative vector belonging to the cell i is denoted by the index i and located in the
codebook with L code vectors ˆis . Instead of using one-dimensional quantization intervals, as in scalar
quantization schemes, the so called m-dimensional Voronoi cells are used. The m-dimensional vector
space could be realized with uniform and nonuniform resolution. Figure 5.17 shows the illustration
of two-dimensional Voronoi cells situation with uniform and nonuniform resolution.
iV ˆ
is
-2
-1
0
1
2
3
2s
1 /s
0 1 2 3-1-2-3-3
1 /s
0 1 2 3-1-2-3-3
-2
-1
0
1
2
3
2s
i
V ˆi
s
Fig. 5.17. Illustration of vector quantization with L=25 two-dimensional (m=2) code vectors; (a) uniform resolution,
(b) nonuniform resolution
If the codebook is known the task of vector quantization consists in replacing an m-dimensional
input vector s by the most similar vector ˆ ˆi opts s . The selection of the most similar vector is
performed in two steps. First, estimation of all distances ˆ( , )id s s between the input vector s and all
codebook vectors, second, determination of minimum distance, i.e.,
ˆ ˆ( , ) min ( , )i opt ii
d ds s s s .
The Voronoi cells are implicitly determined with this.
Since the codebook is known to transmitter as well as to receiver it is not necessary to transmit
the quantized vector ˆi opts . More efficiently is to transmit only address opti . This is illustrated in Figure
5.18.
Distance
estimationˆ( , )id s s
Codebook
L×m
values
s
ˆis
opti Codebook
L×m
values
ˆi opts
DecoderEncoder
Fig. 5.18. Illustration of vector quantization principle

87
If the codebook consists of 2BL m-dimensional vectors ˆis , the chosen address opti and
herewith the implicitly chosen vector ˆi opts could be coded using only B bits. Thus, vector quantization
enables to encode each m-dimensional input vector using 2logB L bits.
There are various possibilities in choosing distance measure. However the computational
procedures must be as simple as possible. For quantization of signal vectors or signal parameters
vectors (e.g., linear prediction coefficients vectors) usually the mean squared error as distance
measure is used [55]. That is
2
1
1 1ˆ ˆ ˆ ˆ( , ) ( ) ( ) ( ) , 1,2,...,
mT
i i i n i m
n
d s s i Lm m
s s s s s s .
This form of distance measure is called Euclidean distance.
Alternative possibility is to use the weighted mean squared error [55]
1ˆ ˆ ˆ( , ) ( ) ( )T
i i idm
s s s s W s s ,
where W is symmetric positive determined m×m-dimensional matrix. Frequently the inverse
covariance matrix C-1 is used. In that case distance measure is called Mahalanobis distance.
For determination of minimum distance the conventional full codebook search method is used.
The method supposes calculation of all distances between all pairs of s and ˆis . However, it is difficult
to achieve, due to the extremely high real-time computational complexity involved in the full
codebook search. To overcome this difficulty various algorithms concerning fast codebook search
have been suggested, such as partial distance search, mean difference, classified pre-selection and
other methods [56].
Vector quantization of speech signals requires the generation of codebooks. The codebooks are
designed using iterative algorithms, e.g., the Linde, Buzo and Gray (LBG) algorithm [54], the Kekre’s
Fast Codebook Generation (KFCG) algorithm the Kekre’s Median Codebook Generation (KMCG)
algorithm, etc. [53]. The input to an algorithm is a training sequence. The training sequence is the
concatenation of a set of signal vectors or signal parameters vectors obtained from people of different
groups and of different ages. The speech signals used to obtain training sequence must be free of
background noise. The speech signals can be recorded in sound proof booths, computer rooms and
open environments.
The codebook generation using, for example, LBG algorithm requires the generation of an
initial codebook, which is the centroid or mean obtained from the training sequence. The centroid
obtained is then split into two centroids or codewords using the splitting method. The iterative LBG
algorithm splits these two into four, four into eight and the process continues till the required numbers
of codewords in the codebook are obtained [54].
In conclusion we present some considerations about computational complexity of VQ. In the
simplest case this could be estimated by the number of mathematical operations (multiplications,
additions, etc.) per second ( /secMathOpN ). Some authors [33] suggest the following formula
/sec 3MathOp sN LF .
In typical case 1024L and 8kHzsF . So we obtain an impressive number of mathematical
operations per second 6N /sec 24,6 10MathOp .

88
6. VIDEO SIGNALS COMPRESSION
6.1 Video Material Characteristics
Let’s begin from some definitions [41]:
Pixel is the smallest single component of a digital image. The greater pixel density is in the
image, the higher image resolution.
Block is a part of an image and is composed of an amount of pixels vertically and
horizontally. The blocks composed of 8×8 pixels are used in MPEG systems. Blocks are
processed individually.
Macro block is an image area in a sequence of digitized images. It is used for motion
compensation starting from the key frame and continuing into the following frames.
Usually macro blocks consist of 16×16 pixels.
Slice is a part of an image joining adjacent macro blocks. They can differ in size and form.
Frame is a separate part of an image taken from the sequence of images. In the television,
frame is comprised of two half-frames, each of which consists of the half of rows (even or
odd). Each frame is divided into macro blocks of 16×16 pixels size, where each macro
block is comprised of 4 blocks of 8×8 pixels size.
We know that conversion of an analog video signal into digital form results in an unacceptable
increase in the bandwidth required for transmitting the signal even when multilevel modulation
schemes that transmit several bits/s/Hz are employed. For digital video to be a practical reality, it is
essential that the number of bits required to represent each picture in a video sequence be significantly
reduced. Fortunately, the characteristics of video material are such that substantial reductions in the
number of bits can be achieved without noticeably affecting the subjective quality of the video
service. Below we describe the characteristics that allow these savings to be made.
6.1.1 Picture correlation
In every picture there are plenty of sufficiently large areas that have similar characteristics:
luminance or chrominance levels. This similarity within a picture can be exploited to reduce the
amount of data that needs to be transmitted to accurately represent the picture. In order to completely
represent the part of a picture, which is similar to another all that would be needed would be the
luminance or chrominance level of the first part together with the statement that other part has the
same level of luminance or chrominance. Mathematically, the similarity of a picture parts is measured
by the autocorrelation function. This function measures how pixel similarity varies as a function of
the distance between the pixels. The correlation coefficient r between two blocks of pixels ( , )A i j
and ( , )B i j where i and j are the pixel positions within each block is defined as [41]
2 2
( , ) ( , ) ( , ) ( , )i j i j i j
r A i j A B i j B A i j A B i j B
,
where A , B are mean values of ( , )A i j and ( , )B i j respectively.
The correlation coefficient between two identical blocks is equal to 1. If two blocks are
completely different, the correlation coefficient will be zero. In the common case, the correlation
coefficient can vary from -1, when 𝐴(𝑖, 𝑗) = −𝐵(𝑖, 𝑗), to 1, when 𝐴(𝑖, 𝑗) = 𝐵(𝑖, 𝑗).
Let us consider a two-dimensional block A consisting of 4 pixels
130 135
126 121
and another block B

89
133 131
123 125
Their arithmetical averages are
130 135 126 121128
4A
,
133 131 123 125128
4B
.
Calculation of the correlation coefficient gives us result 0,0573r . It means the two blocks
are practically uncorrelated.
Let’s calculate the correlation coefficient for luminance component of the image (see
Figure 6.1) for horizontal shifts. Now the correlation coefficient is a function of displacement in
pixels. Result is presented in Figure 6.2.
0 2 4 6 8 10-2-4-6-8-100,75
0,80
0,85
0,90
0,95
1,00
Co
rrel
atio
n c
oef
fici
ent
Displacment (pixels) Fig. 6.1. Image example Fig. 6.2. Horizontal correlation coefficient for luminance
component of the image in Figure 6.1
We see the correlation coefficient reaches its highest value 1 at a displacement of 0. At a
displacement of 1 pixel the correlation coefficient falls only till 0,92. At a displacement of 10 pixels
this coefficient is reduced to 0,79. This clearly shows that neighboring and not nearly enough
neighboring pixels of sufficiently complex picture are intensely correlated that can be used for
reduction of the required data rate.
It is of great significance to calculate a two-dimensional correlation function. In that case the
block of interest is moved over the range of pixels in both the horizontal and vertical directions. The
result will be a three-dimensional surface. Usually the correlation in all directions is high for several
pixel shifts irrespective of picture type.
The correlation is large not only between adjacent blocks of pictures but also between adjacent
pictures in a video sequence.
This information can be used to reduce the amount of data required to represent pictures.
6.1.2 Information quantity in a digital image
Let us evaluate the information quantity aI created by a video source. It is defined as [41]
aaa PPI 22 log)/1(log ,
where 𝑃𝑎 is a probability that a video source is generating content a. From this equation follows:
𝐼𝑎 = 0 , when 𝑃𝑎 = 1. It means that the video source is generating content a continuously
and there is no information provided by its appearance;

90
𝐼𝑎 ≥ 0 , when 0 ≤ 𝑃𝑎 ≤ 1. The appearance of a symbol can provide some amount of
information or no information in the worst case but it is never lost;
𝐼𝑎 ≥ 𝐼𝑏 , when 𝑃𝑎 < 𝑃𝑏 . Probability of the appearance of symbol b is higher than the
probability of appearance of symbol a. However we get more information with the
appearance of less likely symbol.
If events a and b are statistically independent, then total information quantity is the sum of
the quantity created by both symbols:
𝐼𝑎𝑏 = 𝐼𝑎 + 𝐼𝑏.
If information source is generating m symbols 0 1 1, ,.., ms s s with corresponding probabilities
𝑃0,𝑃1, … , 𝑃𝑚−1 , then the average information quantity (called entropy) will be: 1
2
0
logm
i i
i
H P P
Let’s have four symbols {a, b, c, d} with appropriate appearance probabilities, and let’s
calculate the average information quantity (see Table 6.1 below).
Table 6.1 Calculation of the average information quantity for four symbols
Symbol 𝑷𝒊 2
logi i
I P −𝑷𝒊 𝒍𝒐𝒈𝟐𝑷𝒊
a 0,75 0,415 0,311
b 0,125 3,0 0,375
c 0,0625 4,0 0,25
d 0,0625 4,0 0,25
H=1,186 bits/symbol (after summation)
It is evident that two bits (B=2) code is sufficient for four symbols transmission and average
code length L will be equal to 2. It could be calculated formally as
0,75 2 0,125 2 0,0625 2 0,0625 2 2 bits/symboli
i
L PB .
Then coding efficiency could be evaluated as
/ 1,186 / 2 59,3E H L %.
However it is possible to use the variable length code for encoding four symbols and to increase
the code efficiency. Details and techniques used for design variable length coding schemes will be
discussed in the next paragraph.
Given the above discussion, we see many pictures characterizes by high level of correlation
between neighboring pixels located on the horizontal or vertical axes of a picture. Moreover pictures’
pixels are distributed non-uniformly. Exploiting these facts it is possible to reduce the amount of
information that is needed to transmit and sufficiently qualitatively to represent pictures. The
techniques that allow us to solve these tasks are analyzed below. These cover: variable length coding
(entropy coding), predictive coding including motion compensation and transform coding.
6.2 Variable Length Coding (VLC) or Entropy Coding
Variable length code significantly increases encoding efficiency. The most well-known method
for variable length coding is the Huffmann algorithm, which assumes previous knowledge of the
probability of each element. Huffmann encoding could be implemented in the following steps [36,
41]:
Step 1. Symbols being encoded have to be classified in order of decreasing probability of
appearance, starting from the highest one;

91
Step 2. Two symbols of the lowest probability are then grouped into one element, which
probability is the sum of the two probabilities. Bit 0 is attributed to the element with the
lowest probability and 1 to the other element. This reduces by one the number of elements
to be classified. Then all symbols have to be classified in order of decreasing probability
again;
Steps 3, 4,… The abovementioned step is repeated until all the elements have been coded.
In this way, the Huffmann coding tree is built.
The last step. The code for each element is obtained by reading the bits encountered in
moving along the Huffmann tree from right to left.
The Huffmann encoding steps is best illustrated by way of an example. Let us have four
symbols {a, b, c, d} and their probabilities of appearance (0,75 , 0,125 , 0,0625 , 0,0625) respectively.
In Figure 6.3 we present the symbols classified in order of decreasing probability of appearance and
the Huffmann tree built after some steps of encoding.
a
b
c
d
0,75
0,125
0,0625
0,0625
0,125
0,125
0,75 0,75
0,25
0
1
1
1
0
0
Fig. 6.3. Illustration of Huffmann tree building
Process of reading of the Huffmann code words for symbols is illustrated in Figure 6.4.
a
b
c
d
0,75
0,125
0,0625
0,0625
0,125
0,125
0,75 0,75
0,25
0
1
1
1
0
0
1
a)
a
b
c
d
0,75
0,125
0,0625
0,0625
0,125
0,125
0,75 0,75
0,25
0
1
1
1
0
0
1
01
b)
a
b
c
d
0,75
0,125
0,0625
0,0625
0,125
0,125
0,75 0,75
0,25
0
1
1
1
0
0
1
01
001
c)
a
b
c
d
0,75
0,125
0,0625
0,0625
0,125
0,125
0,75 0,75
0,25
0
1
1
1
0
0
1
01
001
000
d)
Fig. 6.4. Illustration of assignment of codes to the symbols; (a) – assignment of code 1 to the symbol „a”
(b) - assignment of code 01 to the symbol „b”, (c) - assignment of code 001 to the symbol „c”,
(d) - assignment of code 000 to the symbol „d”
Let us illustrate now decoding procedures using the following sequence of symbols being
transmitted: {a b c d a a a b}. They generate continuous bit stream 10100100011101.
Decoding procedure is very simple and consists of some rules:
Each received bit has to be analyzed separately;
If analyzed bit coincides with the code of some symbol that symbol is considered to be
decoded;
If analyzed bit does not coincide with the code of any symbol the next bit is grouped with
previous and the group of two bits is being analyzed newly;
If analyzed two bits group coincides with the code of some symbol that symbol is
considered to be decoded;

92
If two bits group does not coincide with the code of any symbol the third bit is added to the
previous group and analysis continues, and so on.
Returning to our example, if received bit stream is the same as transmitted (i.e.,
10100100011101), decoding procedure at the reception end could be illustrated as follows in
Table 6.2.
Table 6.2 Illustration of decoding procedure
Analyzed bits Other bits Decoded symbols
1 0100100011101 a
1 0 100100011101 a ?
1 01 00100011101 a b
1 01 0 0100011101 a b ?
1 01 00 100011101 a b ?
1 01 001 00011101 a b c
1 01 001 0 0011101 a b c ?
1 01 001 00 011101 a b c ?
1 01 001 000 11101 a b c d
1 01 001 000 1 1101 a b c d a
1 01 001 000 1 1 101 a b c d a a
1 01 001 000 1 1 1 01 a b c d a a a
1 01 001 000 1 1 1 0 1 a b c d a a a ?
1 01 001 000 1 1 1 01 - a b c d a a a b
In this example, the average code length L will be equal to
0,75 1 0,125 2 0,0625 3 0,0625 3 1,375 bits/symboli
i
L PB .
The entropy is equal to 1
2
0
log 1,186 bits/symbolm
k k
k
H P P
,
and the code efficiency reaches
/ 1,186 /1,375 86,2E H L %.
It is evident that a pure binary coding of four elements requires 2 bits per element, as we have
seen above. So the compression factor achieved with the Huffmann coding is
1,375 / 2 68,75 %.
Huffmann coding is applied to video signals as a complement to other methods. Foremost the
methods generating elements of non-uniform probability have to be applied. Just such a method is
discrete cosine transform applied after quantization of video signals.
However the Huffmann coding results in redundant number of assigned bits per element. For
example, if the probability of a symbol is high, i.e. 0,9 , then the optimal number of bits will be 0,15,
if – low, i.e. 0,3 , then the optimal number of bits will be 1,6. But in the first case 1 bit will be assigned,
in the second case accordingly – 2 bits. Obviously the number of bits is rather redundant. This
redundancy is reduced by using arithmetic coding method, which is standardized in MPEG-4 and
JPEG-2000 standards.
In the case of video stream the same symbols being sequentially sent are grouped and encoded
using variable length code as a single word.

93
6.3 Predictive Coding
The purpose of predictive coding is to use the already received symbols for prediction of the
adjacent future symbols because usually high correlation exists between them. In this case only the
difference between the predicted and the real symbol needs to be transmitted. If prediction is
sufficiently accurate then a small bit number is satisfactory to transmit the difference without
distortions. For this a method similar to DPCM (Differential Pulse Code Modulation) is used (see
paragraph 7.4).
One of the simplest prediction methods used for prediction of forthcoming symbol is to change
it by the earlier received one (1-D prediction) [41]. Instead of the first predicted symbol as a rule the
average value of quantized video signal is used. In the case of 8-bit quantization the average value is
equal to 128.
Let us demonstrate the prediction procedure using the following values of sample image pixels: 130 135 141 129 151
124 140 165 200 199
119 132 175 205 203
We perform the prediction by expecting that the first predicted pixel will be grey what
corresponds to the average luminance value 128. The results are:
Line 1 130 135 141 129 151
Predicted pixels 128 130 135 141 129
Line 2 124 140 165 200 199
Predicted pixels 128 124 140 165 200
Line 3 119 132 175 205 203
Predicted pixels 128 119 132 175 205
The prediction errors (differences) are:
+2 +5 +6 -12 +22
-4 +16 +25 +35 -1
-9 +13 +43 +30 -2
In the next Figures 6.5, a and 6.5, b we present another example with a black and white photo.
a)
b)
Fig. 6.5. Illustration of 1-D prediction: (a) - Original photo, (b) - Prediction error found using 1-D prediction
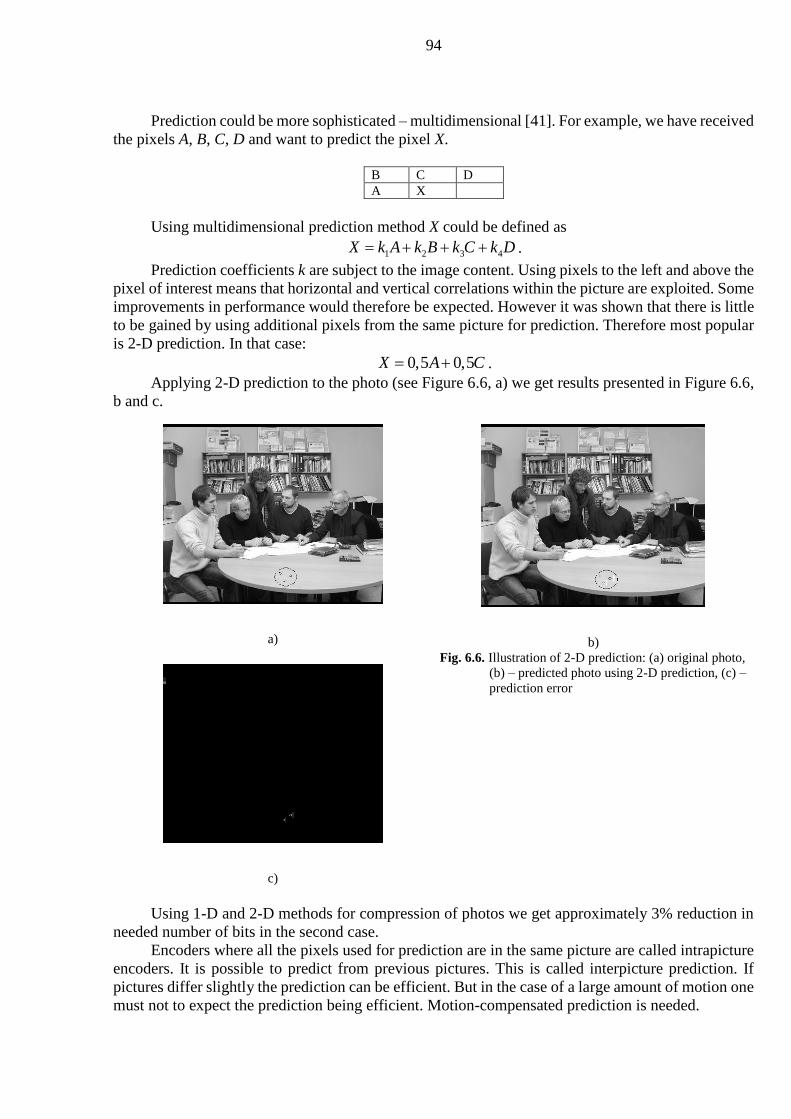
94
Prediction could be more sophisticated – multidimensional [41]. For example, we have received
the pixels A, B, C, D and want to predict the pixel X.
B C D
A X
Using multidimensional prediction method X could be defined as
1 2 3 4X k A k B k C k D .
Prediction coefficients k are subject to the image content. Using pixels to the left and above the
pixel of interest means that horizontal and vertical correlations within the picture are exploited. Some
improvements in performance would therefore be expected. However it was shown that there is little
to be gained by using additional pixels from the same picture for prediction. Therefore most popular
is 2-D prediction. In that case:
0,5 0,5X A C .
Applying 2-D prediction to the photo (see Figure 6.6, a) we get results presented in Figure 6.6,
b and c.
a)
b)
c)
Fig. 6.6. Illustration of 2-D prediction: (a) original photo,
(b) – predicted photo using 2-D prediction, (c) –
prediction error
Using 1-D and 2-D methods for compression of photos we get approximately 3% reduction in
needed number of bits in the second case.
Encoders where all the pixels used for prediction are in the same picture are called intrapicture
encoders. It is possible to predict from previous pictures. This is called interpicture prediction. If
pictures differ slightly the prediction can be efficient. But in the case of a large amount of motion one
must not to expect the prediction being efficient. Motion-compensated prediction is needed.

95
6.4 Prediction with Motion Compensation
Interpicture prediction performance could be improved by evaluating the motion which occurs
between pictures [41–43]. Instead of coding moving objects several times in a picture is proposed to
transmit only information about how the object had moved between pictures removing requirement
to code them at all. It is clear that this would reduce the bit rate, but it is difficult to implement
because:
pictures can be focused by changing the camera focal length,
panorama can be watched (i.e., camera is rotated vertically or horizontally along its axis),
image can be formed by rotation along the camera axis, or by translation along the camera
axis, or by translation in the plane normal to the camera axis.
Each of these movements can affect the content of video stream in real time. Motion
compensation algorithms taking into account all these facts become very sophisticated and bulky and
their implementation in real time hardware would be practically impossible. Fortunately there is
sufficiently simple approach resulting in practically realizable algorithm. Its essence is approximation
of all kinds of movements as translational movement of sufficiently small objects in a plane normal
to the camera axis. The first step of this process is to estimate the object motion.
Briefly, in motion compensated prediction, the encoder searches for a portion of a previous
frame which is similar to the part of the new frame to be transmitted. It then sends (as side
information) a motion vector telling the decoder what portion of the previous frame it will use to
predict the new frame. It also sends the prediction error so that the exact new frame may be
reconstituted.
Motion compensated prediction procedure consists of two stages: motion estimation and motion
compensation.
The motion estimation stage begins from dividing the current picture to be encoded into a
number of blocks. The prediction picture is then searched for the best match to each of the blocks in
the current picture. For the better explicitness of procedure let us introduce a third, motion
compensated picture, which initially is blank, as shown in Figure 6.7.
Current picture Prediction picture Motion compensated picture
(initialy blank) Fig. 6.7. Initial stage of motion-compensated prediction procedure
Each block of the current picture is analyzed in course. We will begin with the block with left
circle. Then a search area has to be defined in the prediction picture as shown in Figure 6.8. The size
of that area is user selectable. However it must be noted that the larger the area, the larger the tracked
motion and the higher computation requirements. Now the search for the block that best matches the
analyzed block in the current picture follows. This is also illustrated in Figure 6.8. After this the found
best matching block is copied into the motion compensated pictures in the same position as the block
to be predicted in the current picture (see Figure 6.8)

96
Current picture and analyzed block Motion compensated picture with the
copied best matching block from the
prediction picture
Prediction picture with selected search
area and found the best matching block
Motion
vector
Search
area
Best matching
block
Fig. 6.8. Search area in the prediction picture for the selected block in the current picture and generation of block in
motion compensated picture
The location of the best matching block in the prediction picture is transmitted to the decoder.
This information is called motion vector. It is shown in the prediction picture (see Figure 6.8) as a
solid arrow. It marks the displacement of the location of the upper left corner of the block in the
current picture to the location of the upper left corner of the chosen best matching block in the
prediction picture. Together with motion vector the prediction difference block has to be transmitted.
It is formed as a difference between the copied block in motion compensated picture and analyzed
block in the current picture. In our example the motion compensated picture completely coincides
with the original picture. Thus the prediction difference picture will consist of zeroes. In reality it
does not consist of zeroes.
This process is repeated for all blocks in the current picture.
The best approach for the search of the best matching block is to compare the block we are
trying to match with every block of the same size within the search area. The order of the search is
not important. It is important only not to miss any of the possible search positions. One of the potential
search variants is to start the search from the upper left corner of the search area and to move the
analyzed block one by one pixel towards the upper right corner. After the upper right corner is reached
the search reverts to the left side one pixel below from the top and again moves to the right and so
on… The search is terminated when the lower left corner of the search area is reached. At each search
position the summed absolute difference is calculated between the block at search position and the
block in the current picture. The block with the smallest summed absolute difference is chosen as the
motion-compensated prediction block.
The search procedures are illustrated in Figures 6.9 and 6.10. The block from the current picture
is of 2×2 pixels and the search area is of 6×6 pixels. There are a total of 25 possible search positions
in this case.
Block from
current
picture
Search area
from prediction
picture
Fig. 6.9. Illustration of current block and search area Fig. 6.10. Illustration of search procedure

97
In the common case for a search area of N×N pixels and a block of M×M pixels the total number
of search positions will be equal to 2( 1)N M .
Example A search area is of 48×48 pixels. Block size is 16×16 pixels. The picture resolution is 704×480
pixels at picture rate of 25 pictures per second.
The number of searches per block is equal to 2 2(48 16 1) 33 1089 searches. For each
search, two blocks of size 16×16 pixels are compared. This requires 256 pixels comparisons per
search. The number of comparisons per block is equal to 1089×256=278874 comparisons. Each
picture consists of 704 480
132016 16
blocks. The total number of pixel operations per picture is
8278874 1320 3,68 10 . The picture rate is 25 pictures/s. The total number of pixel operations per
second is therefore 8 93,68 10 25 9,2 10 .
This simple example shows very clearly that the computational requirements for motion
estimation are very large. The more especially as search areas greater than 48×48 pixels are often
used in reality. Therefore specialized digital signal processing hardware is used.
Now we will present some considerations regarding the most appropriate block size. From one
side, it must be sufficiently small that the likelihood that a block contains two or more different
motions would be small. From the other side, it must be sufficiently large that the resources required
representing the motion vector would be not excessive. For example, if the block size is 1×1 pixel, 8
bits per pixel are needed for representation of motion vector (4 bits/pixel for horizontal and 4
bits/pixel for vertical components). If the block size is 16×16 pixels, only 0,03125 bits per pixel will
be needed. Most video coding standards use a block size of 16×16 pixels.
A block diagram of the motion compensated encoder is presented in Figure 6.11 and of the
matching decoder is shown in Figure 6.12.
Video signal Motion compensated
difference
Motion
estimation
Frame
store
+ Entropy
coding
Bit stream
output
Motion compensated
prediction +
+
–
Motion vectors
Fig. 6.11. Block diagram of motion compensated encoder

98
Bit stream
input
Frame
store
+
+
Entropy
decoding
Video
output
Motion
compensated
prediction
Motion compensated
difference
Motion vectors
Fig. 6.12. Block diagram of matching decoder
Up to this paragraph we have assumed that motion estimation is performed to pixel accuracy.
This is not truth in reality. Motion estimation to subpixel accuracy is possible and is supported in
many video encoding standards. Subpixel accuracy can be achieved by estimating the pixel values at
subpixel displacements by means of bilinear interpolation from the known pixel values. A maximum
of half pixel accuracy is validated for MPEG-2 standard.
Above discussed motion compensated encoding has been lossless. This means that decoder
output signal is identical to the signals at the input of encoder. This ensures the highest quality of
signal. However the achieved compression level is modest. To increase the compression level and to
decrease the transmitted bit rate a quantizer is used for quantization of motion compensated difference
before entropy coding as is shown in Figure 6.13. But it is necessary to note that difference quantizing
leads to lossy motion compensated prediction.
Video signalMotion
compensated
difference
Motion
estimation
Frame
store
+ Entropy
coding
Bit stream
output
Motion
compensated
prediction
+
+
–
Quantizer
Inverse
quantizer
Motion vectors
Fig. 6.13. Block diagram of lossy motion compensated encoder
The uniform quantizer with 511 uniformly spaced quantizing levels is used. The illustration of
an uniform quantizer output-input characteristic with 8 quantizing levels is shown in Figure 4.7, a in
paragraph 4.6. After quantizing the motion compensated difference can take values in the range of
±255. But in the case of successful motion estimation many values of the difference are close to zero
and after quantizing will be equal to zero. This results in decreasing of transmitted bit rate after
entropy coding. Such coding technique is explained in the next paragraph.
As follows from above presented discussion, small quantizer steps results in a high quality
reconstruction of video signals and high data rate. Conversely, the larger quantizer steps used, the
lesser data rate and much lower reconstruction quality is procurable.
The objective measure of the quality of video signals is the peak signal-to-noise ratio (PSNR).
In this case noise is recognized as the mean square error (MSE) between an original and a
reconstructed picture of size M×N pixels. MSE is defined as

99
2
, ,
1 1
1ˆMSE
M N
i j i j
i j
x xMN
,
where ,i jx is the value of the original pixel and ,ˆ
i jx is the value of the corresponding reconstructed
pixel. Thus the PSNR is defined as
2
Peak- to- peak signalPSNR 10lg
MSE
If 8 bits (256 levels) quantization is used for luminance or chrominance signals, the peak-to-
peak signal is equal to 255. In this case
2
255PSNR 10lg
MSE .
For the comparison of the performance of various coding techniques the rate-distortion curves
are used. This curve represents the reliance of PSNR on the data rate. Typical rate-distortion curve is
shown in Figure 6.14.
Data rate (Mbit/s)
PSNR (dB)
Fig. 6.14. Typical rate-distortion curve
6.5 Compression of Images Using Transformations
It was shown before that predictive encoding can reduce the bitrate of the images to be
transmitted, but encoding efficiency is limited because the number of transmitted elements (pixels
differences) is similar as in encoding with no prediction. The reduction effect is achieved by reduced
entropy when prediction is used.
Amount of transmitted elements can be reduced by using mathematical image transformations,
when original values of the pixels are multiplied by the values of the collection of base functions.
Result is summed to obtain coefficients of image expansion using those base functions. Values of
coefficients show how much the variations of the pixels values are similar to the corresponding base
functions values. In the case of good coincidence the result is a large integer. In the opposite case the
result can be small positive or negative integer.
The goal of good signal compression transform is to transfer the information being in the data
into the smallest number of transform coefficients. In the general case, when a data block is described
as N elements 1-D vector
1 2[ .... ]Nx x xx ,
the transform is performed by multiplying the data vector by an N×N matrix of base functions:
11 12 11 1
21 22 22 2
31 32 3
1
....
....
. .... .
. ..
......
N
N
N
N NN NN
t t tC x
t t tC x
t t t
C xt t
C .
Each row of base functions matrix 1 11 12 1[ .... ]Nt t tt , 2 21 22 2[ .... ]Nt t tt ,…, 1 2[ .... ]N N N NNt t tt
represents a basis vector of transform. A successfully chosen transform effectively transfers data

100
information into the smaller number of transform coefficients C in comparison with the number of
data vector elements. Thus transmitting only marked coefficients we can reduce the amount of
information processed.
For demonstration purposes let us examine a simple example of a four point 1-D array
expansion using Hadamard base functions. The examined array is
[64 17 110 23] .
The values of the Hadamard functions ( , 1,2,...mH m ) are presented in Table 6.3 below.
Table 6.3 The values of the Hadamard functions ( , 1, 2,...m
H m )
No
Values of the
first function
1(1,..., 4)H
Values of the
second function
2(1, ..., 4)H
Values of the
third function
3(1, ..., 4)H
Values of the
fourth function
4(1, ..., 4)H
1 0,5 0,5 0,5 0,5
2 0,5 0,5 -0,5 -0,5
3 0,5 -0,5 -0,5 0,5
4 0,5 -0,5 0,5 -0,5
Expansion coefficients are calculated as follows:
0
1
2
3
64 0,5 17 0,5 110 0,5 23 0,5 107,
64 0,5 17 0,5 110 0,5 23 0,5 26,
64 0,5 17 0,5 110 0,5 23 0,5 20,
64 0,5 17 0,5 110 0,5 23 0,5 67.
K
K
K
K
Coefficient 0K is an average of pixels values and usually is called DC (Direct Current)
coefficient. Other coefficients are called AC (Alternating Current) coefficients. Transformed array
will be:
[107 26 20 67] .
The Hadamard transformation is reversible as many other transformations. It means that
original pixel values can be reconstructed by using inverse transformation. For this obtained values
of expansion coefficients have to be multiplied by the corresponding base functions values and then
products have to be added together. Calculation results are presented in Table 6.4.
Table 6.4 Intermediate and final results of Hadamard inverse transformation calculation
Coefficients
0K ,
1K ,
2K ,
3K 0 1
(1, ..., 4)K H 1 2
(1, ..., 4)K H 2 3
(1, ..., 4)K H 3 4
(1, ..., 4)K H Row sum
(Reconstructed values)
107 53,5 -13 -10 33,5 64
-26 53,5 -13 10 -33,5 17
-20 53,5 13 10 33,5 110
67 53,5 13 -10 -33,5 23
For encoding images and video streams the Discrete Cosine Transformation (DCT) is regularly
used. DCTs are important to numerous applications in science and engineering, from lossy
compression of audio (e.g. MP3) and images (e.g. JPEG) (where small high-frequency components
can be discarded), to spectral methods for the numerical solution of partial differential equations [44].
The use of cosine rather than sine functions is critical for compression, since it turns out that fewer
cosine functions are needed to approximate a typical signal.

101
In the case, when a data block is described as N elements 1-D vector 1 2[ .... ]Nx x xx , it‘s
discrete cosine transform coefficients are the list of length N given by: 1
0
(2 1)( ) ( ) ( )cos , 0,1,2,..., 1
2
N
n
n kC k k x n k N
N
.
Similarly, the inverse DCT is defined as 1
0
(2 1)( ) ( ) ( )cos , 0,1,2,..., 1
2
N
n
n kx n k C k k N
N
In both of these equations
1/ , 0,( )
2 / , 1,2,..., 1.
N kk
N k N
In order to reduce the complexity of the circuitry and the processing time required, the
elementary data block size chosen is generally 8×8 pixels, which DCT transforms into matrix of 8×8
coefficients.
In this case the basic functions ( )t k are 1-D arrays defined as 1
0
(2 1)( ) ( )cos , 0,1,2,..., 1
2
N
n
n kt k k k N
N
.
The basic functions for an 8-point DCT are given in the matrix, shown below.
0,354 0,354 0,354 0,354 0,354 0,354 0,354 0,354
0,49 0,416 0,278 0,098 -0,098 -0,278 -0,416 -0,49
0,462 0,191 -0,191 -0,462 -0,462 -0,191 0,191 0,462
0,416 -0,098 -0,49 -0,278 0,278 0,49 0,098 -0,416
0,354 -0,354 -0,354 0,354 0,354 -0,354 -0,354 0,354
0,278 -0,49 0,098 0,416 -0,416 -0,098 0,49 -0,278
0,191 -0,462 0,462 -0,191 -0,191 0,462 -0,462 0,191
0,098 -0,278 0,416 -0,49 0,49 -0,416 0,278 -0,098
These are just sampled versions of cosine waveforms of increasing frequency ranging from 0
periods per vector (i.e., constant) in the case of the first vector to 3,5 period per vector in the case of
the last vector with each vector containing 0,5 to one additional periods before it. Graphical views of
these waveforms are presented in Figure 6.15.
1 2
3 4

102
Fig. 6.15. Graphical view of 8 basic functions for 1-D DCT
For pictures 2-D DCT is required. The forward and reverse transforms are calculated according
to the equations 1 1
0 0
(2 1) (2 1)( , ) ( ) ( ) ( , )cos , , 0,1,2,..., 1
2 2
N N
m n
m k n lC k l k l x m n k l N
N N
and 1 1
0 0
(2 1) (2 1)( , ) ( ) ( ) ( , )cos , , 0,1,2,..., 1
2 2
N N
m n
m k n lx m n k l C k l k l N
N N
,
where
1/ , 0,( )
2 / , 1,2,..., 1.
N kk
N k N
The basic vectors ( , )t k l in this case are 2-D arrays defined by
(2 1) (2 1)( , ) ( ) ( )cos , , 0,1,2,..., 1
2 2
m k n lt k l k l m n N
N N
.
Pictures of the 64 2-D basic vectors from an 8×8 transform are shown in Figure 6.16.
Fig. 6.16. Basic vectors for 2-D DCT
5 6
7 8

103
Transforming integer pixel values into real transform coefficients enables us to transmit those
instead transmitting pixel values. However, transmitting DCT coefficients without any further
processing would probably lead to an increase in the transmissible bitrate. Fortunately the DCT packs
most energy of the picture into a small number of coefficients. Quantizing these coefficients and then
transmitting only the significant ones can result in significant saving of bitrate. The question remains
how best to do this. As the energy is compacted primarily into the first few (low frequency)
coefficients one approach would be to simply not transmit the other (high frequency) coefficients.
The rather that eye sensitivity is higher in the lower and medium frequencies and is significantly
lower in high frequencies. That means that transmissible bitrate can be reduced by eliminating the
high frequency coefficients. However, even at these higher frequencies a significant signal will still
be observable. Therefore the step size of the quantizer could be varied according to the frequency
represented with the step size increasing as the frequency increases. This ensures that high-frequency
coefficients will be quantized to zero although they are sufficiently large.
To do this a quantization relationship between quantized coefficients and original coefficients
values in the form of
,
,
,
8ˆ round k l
k l
k l
CC
QW
is proposed. Here ,ˆ
k lC is the value of quantized coefficient, ,k lC is the value of the original coefficient,
Q is the quantizer step size for a particular block of data, and ,k lW is the weighting values for this
particular coefficient. The weighting value ,k lW increases as the vertical and horizontal frequencies
increase. An example of a matrix of weighting values is presented below.
8 16 19 22 26 27 29 34
16 16 22 24 27 29 34 37
19 22 26 27 29 34 34 38
22 22 26 27 29 34 37 40
22 26 27 29 32 35 40 48
26 27 29 32 35 40 48 58
26 27 29 34 38 46 56 69
27 29 35 38 46 56 69 83
For example, if calculated DCT coefficient 4,4 75C and the quantization step size is 16, then
the quantized coefficient 4,4C , appreciating that the corresponding weighting value is 32, will be
4,4
8 75ˆ round round(1,17) 116 32
C
.
If the coefficient 1,1C had the same value (i.e., 75), the quantized coefficient 1,1C will have the
value
1,1
8 75ˆ round round(2,34) 216 16
C
.
Example Let us have an 8×8 block of data from a picture as presented below [41]
91 42 67 72 83 189 245 241
75 74 171 245 240 227 216 221
50 45 75 65 119 228 245 234

104
72 93 198 246 239 225 214 222
33 58 75 72 155 242 242 229
75 106 215 248 237 223 216 223
DCT coefficients after a 2-d DCT calculation and rounding to the nearest integer are
1294 -495 -104 0 -22 34 48 7
-66 -13 84 13 -1 30 5 -8
-15 7 26 1 21 24 -1 -4
-35 -7 53 12 -17 -4 -5 1
-10 8 19 -9 6 15 2 -2
-60 -24 71 25 -26 -7 -1 1
-7 19 35 -25 -8 24 11 0
-189 -117 173 99 -76 -31 0 -2
The final result after quantization using step size of 8 and the weighting factors, presented
above, is
161 -30 -5 0 0 1 1 0
-4 0 3 0 0 1 0 0
0 0 1 0 0 0 0 0
-1 0 2 0 0 0 0 0
0 0 0 0 0 0 0 0
-2 0 2 0 0 0 0 0
0 0 1 0 0 0 0 0
-7 -4 4 2 -1 0 0 0
We see that even 45 coefficients are equal to zero.
After quantizing DCT coefficients the stage of preparation for transmission them to the receiver
follows. The first step of this process is scanning of 2-D array of coefficients into 1-D array. For this
the zig-zag scanning order of coefficients is used as shown in Figures 6.17, 6.18.
Increasing horizontal frequncy
Increasin
g v
ertical frequen
cy
DC
coefficient
161 -30 -5 0 0 1 1 0
-4 0 3 0 0 1 0 0
0 0 1 0 0 0 0 0
-1 0 2 0 0 0 0 0
0 0 0 0 0 0 0 0
-2 0 2 0 0 0 0 0
0 0 1 0 0 0 0 0
-7 -4 4 2 -1 0 0 0
Fig. 6.17. Illustration of zig-zag scanning order Fig. 6.18. Zig-zag scan order of quantized DCT
coefficients
This method ensures that the DC coefficient is scanned first. Then low-frequency AC
coefficients follow. Higher frequency coefficients are scanned lastly. This scanning order ensures

105
also that the last nonzero coefficient will be met well before the end of the scan. There is no reason
to continue the scan process after the last nonzero coefficient. It can be terminated at that point.
After the scanning, the coefficients have to be reordered into the encoding-friendly form.
Primarily the 1-D array of quantized coefficients is formed as shown below.
{161, 30, -4, 0, 0, -5, 0, 3, 0, -1, 0, 0, 1, 0, 0, 1, 1, 0, 0, 2, 0, -2, 0, 0, 0, 0, 0, 1, 1, 0, 0, 0,
0, 0, 2, 0, -7, -4, 1, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 4, 2, 0, 0, 0, 0, 0, 0, 0, -1, 0, 0, 0, 0, 0, 0}
Now one can explicitly see the array of quantized AC coefficients contains series of consecutive
zeroes. Therefore, a coding advantage can be obtained by using the so called run-length encoding
method.
The essence of the method is that the 1-D array of coefficients is reordered once more
converting each nonzero element into the pairs of integers the first of which indicates the number of
consecutive zeroes before the next coefficient, and the second indicates the next coefficient. The
resulting run-coefficient pairs of our 1-D array are shown below.
{(0, 161) (0, 30) (0, -4), (2, -5), (1, 3), (1, -1), (2, 1), (2, 1), (0, 1), (2, 2), (1, -2),
(5, 1), (0, 1), (4, 2), (1, -7), (0, -4), (0, 1), (10, 4), (0, 2), (7, -1), EOB (End Of Block)}
The 1-D array of coefficients contains 64 numbers. The run-coefficient pairs contain 41 number
including EOB sign. The effect of compression is evident. Further compression is achieved by
applying for encoding of the run-coefficient pairs a Huffman code. A special Huffman code is used
for encoding EOB sign. Since this sign occurs quite commonly in the transmitted stream, it is
represented by a short Huffman code word. The Huffman coding tables for possible run-coefficient
pairs have been developed by standards bodies and are universally accepted.
The DCT is also used to code the motion-compensated prediction difference [41]. The block
diagram of a motion-compensated DCT encoder is shown in Figure 6.19.
Video signal
Motion
compensated
difference
Motion
estimation
Frame
store
+ Entropy
coding
Bit stream
output
Motion
compensated
prediction +
+
–
Quantizer
Inverse
quantizer
Motion vectors
Direct DCT
Inverse
quantizer
DCT
coefficientsQuantized
DCT
coefficients
Reconstructed
DCT
coefficients
Reconstructed motion
compensated
difference
Reconstructed
picture
Fig. 6.19. Motion-compensated prediction difference DCT encoder
The corresponding decoder is shown in Figure 6.20.

106
Bit stream
input
Frame
store
+
+
Entropy
decoding
Video
output
Motion
compensated
prediction
Quantized
DCT
coefficients
Motion vectors
Inverse
quantizationInverse DCT
Reconstructed
DCT
coefficients
Reconstructed
motion
compensated
difference
Fig. 6.20. Motion-compensated prediction difference DCT decoder
Pixels arrive at the encoder at regular rate. However output bit stream rate is not constant. The
reasons are:
the number of DCT coefficients to be encoded differs from block to block;
the number of bits required to encode each DCT coefficient depends on the number of zero
quantized DCT coefficients.
For stabilization of the encoder output bit rate, rate control buffer is used. It is inserted at the
very output of the encoder. The buffer is simply a block of memory. Data enter into the buffer of
encoder at a variable rate and leave it at a constant rate.
In the case of the decoder, the rate control buffer is inserted at the very input of the decoder.
This buffer accepts data at a constant rate from the channel and transfers data to the entropy decoder
at the variable rate that it requires.

107
7. LINEAR PREDICTIVE ANALYSIS of SPEECH SIGNALS
7.1 Basic Principles of Linear Predictive Analysis
Linear predictive (LP) analysis is one of the most significant and the most common procedure
used almost in all todays’ audio compression algorithms and standards [46]. All researchers and
scientists unanimously agree that linear prediction coefficients (LPC) are the most suitable parameters
which could be used by solving audio and speech signal representation and compression tasks. Now
nobody discusses about the merit of LPC. All discussions now are taking place only in their
computational procedures acceleration.
Hence, referring to the block diagram of the model for speech production (see Figure 3.19 in
paragraph 3.7), to the scheme of digital IIR filter, representing vocal tract (see Figure 3.18 in
paragraph 3.7), and supporting equation (3.2)
1
( ) 1P
k
k
k
H z G b z
, (7.1)
describing system function of the mentioned filter, we can write simple difference equation describing
relation between speech samples ( )s n and excitation function samples ( )u n [31, 33, 45]
1 1
( ) ( ) ( ) ( ) ( )P P
k k
k k
s n Gu n b s n k v n b s n k
. (7.2)
The proper values of coefficients kb are unknown at this time. In the light of difference equation
(7.2) form we can introduce the concept of estimate of speech signal or, in other words, the concept
of synthesized speech signal ˆ( )s n denoting it as [33]
P
k
k knsns1
)()(ˆ . (7.3)
This speech signal estimate formation procedure is called linear prediction (LP) and unknown
coefficients k , 1,2,...,k P – linear prediction coefficients and difference equation order P –
predictor order [45]. Signal estimate ˆ( )s n is called synthesized or predictable signal. Thus LP
procedure allowed us to predict predictable signal sample ˆ( )s n at nth – time moment gathering up P
previous signal samples ( 1), ( 2), , ( )s n s n s n P , multiplied by weighted coefficients
P ,,, 21 . This type of prediction is called short-time prediction as small number of previous
neighboring signal samples is used. Usually predictor order P does not exceed 10-15. In fact the
neighboring speech signal samples correlation is estimated.
The digital filter system function corresponding to the last difference equation (7.3) is
1
ˆ( )( )
( )
Pk
k
k
S zC z z
S z
. (7.4)
This is nonrecursive finite impulse response (FIR) filter. Block diagram of direct filter form
(usually called transversal filer) is depicted in Figure 7.1.
...
( )s nz -1z -1 z -1 z -1
ˆ( )s n
1 2 1P P
...
...
C(z))(ns ˆ( )s n
Fig. 7.1. Linear prediction filter

108
Let us evaluate the difference between the signal and predictive signal which is called prediction
error.
ˆ( ) ( ) ( )d n s n s n . (7.5)
Referring to the equation (7.2) we get
1
ˆ( ) ( ) ( ) ( ) ( )P
k
k
d n s n s n s n s n k
. (7.6)
This difference equation corresponds to the filter system function
1
ˆ( ) ( ) ( )( ) 1 ( ) 1
( ) ( )
Pk
k
k
D z S z S zP z C z z
S z S z
. (7.7)
It follows from the last system function (7.6) and corresponding difference equation (7.5) that
the filter is finite impulse response (FIR) filter as well. Block diagram is presented in Figure 7.2.
...
( )s n
z -1z -1 z -1 z -1 ˆ( )s n
1 2 1P P
+
–
( )d n
...
...
P(z))(ns ( )d n
C(z)
)(ns
ˆ( )s n
+
–
( )d n
Fig. 7.2. Block diagram of prediction error filter
It can be seen by comparing equations (7.2) and (7.6), if k kb , then ( ) ( ) ( )d n v n Gu n .
Thus, the prediction error filter ( )P z will be an inverse filter for the system ( )H z described by the
equation (7.1) under the condition k kb , i.e.,
1
( )( )
1k k Pb
kk
k
G GH z
P zz
. (7.8)
Now it is possible to correct the block diagram of the speech synthesis filter modelling vocal
tract (see Figure (3.18). Under the assumed condition k kb we get speech synthesis filter, depicted
in Figure 7.3.
H(z)( )v n ( )s n
C(z)
)(ns
ˆ( )s n
( )v n ...
( )s n
z -1z -1 z -1 z -1ˆ( )s n
121P P
( )v n
...
...
Fig. 7.3. Final block diagram of speech synthesis filter

109
The basic problem of linear prediction analysis is to determine a set of predictor coefficients
k directly from speech signal. However the speech signal is time-varying signal. Consequently
the predictor coefficients must be estimated from short segments of the speech signal in such a way
that will minimize the mean-squared prediction error over a short segment of the speech waveform.
The resulting parameters are then assumed as the parameters of the system function ( )H z in the
model for speech production. Exceptional characteristic of the resulting parameters is their
undisputable useful contribution toward accurate representation of the speech signal.
7.2 Optimal prediction coefficients
The short-time average (mean-squared) prediction error while analyzing mth speech signal
segment is defined as [45]
2
2
1
( ) ( ) ( )P
d k
n n k
E d n s n s n k
. (7.9)
The values of k that minimize dE can be found by setting
0, 1, 2,...,d
k
Ek P
, (7.10)
thereby obtaining system of linear independent equations
1
( , ) ( ,0), , 1, 2, ,P
k
k
l k l k l P
, (7.11)
where
( , ) ( ) ( ), , 1,2,...,n
l k s n l s n k k l P . (7.12)
To solve equations (7.10) for the optimum LPC one must first compute the quantities ( , )l k
for , 1,2,...,k l P . Once this is done we only have to solve equations (7.10) to obtain the k ‘s.
Primarily it is necessary to determine for this the limits on the sum in equation (7.12). If we
wish to develop a short-time analysis procedure, the limits must be over a finite interval. There are
two basic approaches to this question differing in mean-squared prediction error definition,
requirements of short-time analysis and computational complexity. One of them is the autocorrelation
method; the second one is the covariance method [45].
Secondly it is necessary to solve the linear equations in an efficient manner. There are plenty
of techniques that can be used to solve a system of P linear equations in P unknowns. However they
are not equally efficient. For example, using the well-known Gaussian method required number of
mathematical operations approximately is proportional to P3. Because of the special properties of the
equations coefficient matrices it is possible to solve the equations much more efficiently.
7.3 The autocorrelation method
Using autocorrelation method the mth segment of speech signal is to be assumed identically zero
outside the interval 0 1n N . The corresponding prediction error for Pth order predictor will be
nonzero over the interval 0 1n N P . For this case the exact expression of prediction error will
be
1
2
0
( )N P
d
n
E d n
. (7.13)
It is simple to show that ( , )k l from (7.12) could be expressed as

110
1
0
( , ) ( ) ( ), 1, 2, , , 0,1, 2, ,N P
n
l k s n l s n k l P k P
. (7.14)
After some algebraic transformations of equation (7.14) we get
( , ) (| |), 1, 2, , , 0,1, 2, ,l k R l k l P k P , (7.15)
where
1
0
( ) ( ) ( )N k
n
R k s n s n k
(7.16)
is the short-time autocorrelation function of the mth segment of the speech signal. Therefore equation
(7.14) can be expressed as
1
(| |) ( ), 1P
k
k
R l k R l l P
, (7.17)
or in matrix form as
1
2
(0) (1) ( 1) (1)
(1) (0) ( 2) (2)
( 1) ( 2) (0) ( )
m
P
R R R P R
R R R P R
R P R P R R P
. (7.18)
7.3.1 The Durbin‘s recursive procedure
The P×P matrix of autocorrelation values is a Toeplitz matrix as it is symmetric and all the
elements along diagonal are equal. This special property is exploited to obtain algorithm for the
solution of equations (7.17). The most efficient method known for solving this particular system of
equations is the Levinson–Durbin recursion procedure which can be expressed as follows [31, 33]:
1) )0()0( RE ;
2)
1( 1)
1
( 1)
( ) ( )
, 1
ll
j
j
l l
R l R l j
k l PE
;
3) ( )l
ll k ;
4) ( ) ( 1) ( 1)
, 1 1l l l
lj j l jk j l ;
5) ( ) 2 ( 1)(1 )l l
lE k E ,
(7.19)
where lk are so called partial correlation coefficients – PARCOR‘s (about them read some below).
Equations (7.19) are solved recursively for each 1, ,l P and final result is given as
PjP
jj 1,)( . (7.20)
For example, we have autocorrelation matrix 2×2
)2(
)1(
)0()1(
)1()0(
2
1
R
R
RR
RR
.
According to Durbin‘s procedure we will have
)0()0( RE ,
)0(
)1(1
R
Rk ,

111
)0(
)1()1(1 R
R ,
)0(
)1()0( 22)1(
R
RRE
,
)1()0(
)1()0()2(22
2
2RR
RRRk
,
)1()0(
)1()0()2(22
2)2(
2RR
RRR
,
)1()0(
)2()1()0()1(22
)2(1
RR
RRRR
,
)2(11 ,
)2(22 .
In the simplest case, when predictor is of the first order ( 1P ), we have only one equation
1(0) (1)R R .
It follows from this
1
(1)(1)
(0)
Rr
R .
This result means that in the case of the first order of predictor we have only one predictor
coefficient and it is equal to the second sample of normalized autocorrelation function. Knowing from
[31] that this coefficient for speech signal is equal to 0,8–0,9 and referring to the equation (7.3) and
block diagram in Figure (7.1) we can conclude that having only the first order predictor (P=1) the
best way to predict the current sample of speech signal is to multiply the previous one by 0,8–0,9 i.e.
1ˆ( ) (0) (0,8 0,9) ( 1)s n s s n .
It should be noted that quantities ( )lE in equations (7.19) are the prediction error for a predictor
of order l. Thus at each stage of solution the change of the prediction error respecting to change of a
predictor order is observed.
Using this method the number of required mathematical operations approximately is
proportional to P2.
As one can see from Durbin‘s recursive equations (7.19) the main role in computing LPC play
PARCOR‘s , 1, ,lk l P . It is possible to calculate LPC from PARCOR‘s and vice versa. However,
in contrast to LPC, PARCOR‘s have physical meaning. This is clear while analyzing vocal tract
model consisted of concatenation of lossless acoustic tubes of equal length (see Figure (3.17, b)). If
lth tube cross-section area is lA and (l+1)th – 1lA then sound wave reflection coefficient at the
junction of these sections is equal
1
1
l ll
l l
A A
A A
.
and PARCOR‘s are related to corresponding reflection coefficients as
l lk .
From this follows that PARCOR’s lk are in the range
1 1lk .

112
This condition on the parameters lk is important since can be shown that it is necessary and
sufficient condition for all of the roots of the polynomial ( )P z from the equation (7.7) to be inside
the unit circle, thereby guaranteeing the stability of the system ( )H z .
7.3.2 Prediction effectiveness
Initial expression for prediction error is described by equation (7.9). Performing actions
provided in this equation and referring to extended form of equation (7.10) and to equations
(7.15, 7.16) we get
min
1 1
(0) ( ) ( )P P
d k s k
k k
E R R k E R k
. (7.21)
Dividing both sides of this equation by the number of samples of speech signal segment N we
jump from energy concept to power concept and get
min
1
( )P
d s k
k
P P r k
, (7.22)
where mindP is minimal average prediction error power, sP – average signal power and ( )r k –
normalized autocorrelation function.
In general the ratio
sP
d
PG
P (7.23)
is called prediction effectiveness and expresses relational decrease of bit rate using differential
quantization scheme. In the partial case when the power of segment prediction error is minimal we
get optimal (maximal) prediction effectiveness
min
1
1
1 ( )
sP opt P
dk
k
PG
Pr k
. (7.24)
Using only the first order predictor and equating the values of 1 and (1)r to its statistical
means, i.e. to 0,8–0,9 we get 1 2,78 5,26 4,43dB 7,21dBoptG .
7.4 The covariance method
Without going into details we emphasize that the second approach to defining the mth speech
signal and the limits on the sums is to fix the interval over which the mean-squared error is computed.
Hence, according this the expression of the mean-squared error takes the form 1
2
0
( )N
d
n
E d n
.
Then functions ( , )l k becomes
1
( , ) ( ) ( ), 1, 2, , , 0,1, 2, ,N k
n k
l k s n s n k l l P k P
and the system of linear equations becomes
1
( , ) ( ,0), 1, 2,...,P
k
k
l k l l P
or in matrix form

113
)0,(
)0,2(
)0,1(
),()2,()1,(
),2()2,2()1,2(
),1()2,1()1,1(
2
1
PPPPP
P
P
P
.
We see that this P×P matrix of correlation-like values is a symmetric, positive definite matrix
but not Toeplitz matrix. Detailed analysis shows that this matrix of ( , )l k values has the properties
of covariance matrix. Therefore the method of analysis based upon this method of computation of the
mean-squared prediction error is known as the covariance method. The system of suchlike equations
can be solved in an efficient manner and the resulting method of solution is called the Cholesky
decomposition [31, 33, 45].
Not going deep into details of Cholesky decomposition we conclude that this method requires
some less mathematical operations than Gaussian method but nevertheless their number is
approximately proportional to P3.
7.5 The choice of parameters for linear predictive analysis
The main parameter is the order of predictor P. There is a series of studies performed by
different researchers in which they analyzed the dependence of mean-squared prediction error upon
the order of predictor. Some results of investigations are presented in Figure 7.4.
Voiced speech
0
0,2
0,4
0,6
0,8
1,0
4 8 12 2016 P
Unvoiced speech
No
rmal
ized
pre
dic
tio
n e
rro
r
0 Fig. 7.4. Variation of prediction error versus predictor order
It is seen from these curves that the prediction error decreases very quickly until the predictor
order reaches value 12–14. Then the prediction error decreases slowly. Note that the prediction error
for unvoiced speech is much higher than for voiced speech because the LP model much better
describes the voiced speech than unvoiced. So, the predictor order could be chosen on the basis of
predefined value representing the relative reduction of prediction error due to increase of the
predictor order by one. The corresponding formula follows
P p , when ( 1)
( )1
p
p
E
E
, (7.25)
where ( )pE and ( 1)pE are the prediction errors of p and (p+1) order predictor respectively. Typical
P value in many investigations [33] oscillates between 10 and 14.
As it is known speech is non-stationery process. Consequently LPC’s are time varying
functions. Therefore it is necessary to renew periodically their estimation procedure. Fortunately
LPC’s fluctuate slowly. Quasi-stationery period of their fluctuation is about 10–12 ms. As a result
the duration of the audio signal segment for LP analysis is chosen equal to 10–12 ms (N samples) on
the average and the next segment for analysis is picked approximately after 5 ms (L samples) as is
shown in the Figure 7.5.

114
This signal analysis technique is called sliding window technique or simple windowing. There
are a lot of windows used for windowing. Most popular used for LP analysis are Rectangular (no
window), Triangular, Hann and Hemming windows. Graphics of some of them are presented in
Figure 7.6 and analytical expressions are given below.
L
L n
w(n)
N
mn
mth segment
1mn N
0,2
0,8
1,0
N/2 N-10
w(n)
0,6
0,4
n
Triangular
Hamming
Hann
Rectangular
Fig. 7.5. Illustration of sliding window technique Fig. 7.6. Some most popular windows
Rectangular window:
1, 0 ( 1);( )
0, .
n Nw n
otherwise
Bartlett (triangular) window:
2 ( 1) , 0 ( 1) 2;
( ) 2 2 ( 1) , ( 1) 2 1;
0, .
n N n N
w n n N N n N
otherwise
Hamming window:
0,54 0,46cos 2 ( 1) ], 0 1;( )
0, .
n N n Nw n
otherwise
Hann window:
0,5[1 cos 2 ( 1) ], 0 1;( )
0, .
n N n Nw n
otherwise
The stability of signal synthesis filter (see Figure 7.3) with the system function ( )H z is very
important. Theoretically autocorrelation method guarantees filter stability. However due to
practically finite calculation accuracy of the autocorrelation function filter can be unstable. The
reason consists in the signal spectrum shape. For example, the average spectrum of the speech signal
falls down approximately 6 dB per octave (see Figure 7.7). This increases autocorrelation function
and LPC’s calculation errors, especially in the high frequency range. Therefore the signal synthesis
filter reconstructs the speech spectrum, especially the high frequency part, not sufficiently correctly.
For improvement of quality of synthesized speech in high frequencies J. D. Markel and A. H. Grey
[45] recommended forward speech signal spectrum correction by means of pre-emphasis filter which
system function is
1( ) 1preH z z (7.26)
and corresponding frequency response is depicted in Figure 7.8. Typical value of the filter parameter
is equal to 0,8. Filter‘s aim is to compensate the high-frequency part of the speech signal that was
suppressed during the human sound production mechanism. This filter analogically to de-emphasis
filter in the FM broadcasting system raises spectrum of initial speech signal in high frequency range
approximately 6 dB per octave. Resulting spectrum is much more flat than initial signal spectrum.

115
-75
-65
-55
-35
-45
-25
0,250,0625 f, kHz1,0 2,0
( ), dBfP
4,0 8,0
1
2
-10
-15
-20
f, kHz
10
5
0
-5
0,5 1,0 1,5 2,0 2,5 3,00
0,7
0,9
3,5
( ), dBpreH f
Fig. 7.7. Two possible average spectra of speech signal Fig. 7.8. Frequency response of pre-emphasis filter
For inverse correction of synthesized speech spectrum de-emphasis filter is used at the output
of synthesizer. System function of de-emphasis filter is
1
1( )
1deH z
z
. (7.27)
Typical value of the filter parameter is equal to 0,8.
This pre-emphasis-de-emphasis system described above is one of simplest used before LP
analysis. More sophisticated filters called whitening filters are used very often. If the spectrum of
speech signal is described by the frequency function ( )S f , the frequency response of the whitening
filter ( )G f must meet the condition
2( )
( )
constG f
S f .
In this case spectrum of the output signal will be 2
( ) ( ) ( )outS f S f G f const ,
i.e. the output process will be white Gaussian noise with flat spectrum.
The method of linear prediction was widely used by developing effective speech compression
algorithms and corresponding devices called vocoders (Voice Coders) [31, 33, 46].

116
8. AUDIO SIGNALS COMPRESSION
8.1 Sub-Band Coding Principle
Sub-Band Coding (SBC) is a powerful and general method of encoding audio signals
efficiently. Unlike source specific methods (like LPC, which works very well only on speech), SBC
can encode any audio signal from any source, making it ideal for music recordings, movie
soundtracks, and the like. MPEG Audio is the most popular example of SBC.
SBC depends on a phenomenon of the human hearing system called masking. Normal human
ears are sensitive to a wide range of frequencies. However, when a lot of signal energy is present at
one frequency, the ear cannot hear lower energy at nearby frequencies. We say that the louder
frequency masks the softer frequencies. The louder frequency is called the masker.
The basic idea of SBC is to save signal bandwidth by throwing away information about
frequencies which are masked. The result won't be the same as the original signal, but if the
computation is done right, human ears can't hear the difference.
The simplest way to encode audio signals is Pulse Code Modulation (PCM), which is used on
music Compact Discs (CDs), Digital Audio Tape (DAT) recordings, and so on. Like all digitization,
PCM adds quantization noise to the signal, which is generally undesirable. The fewer bits used in
digitization, the more noise gets added. The way to keep this noise from being a problem is to use
enough bits to ensure that the noise is always low enough to be masked either by the signal or by
other sources of noise. This produces a high quality signal, but at a high bit rate (over 700 kbps for
one channel of CD audio). A lot of those bits are encoding masked portions of the signal, and are
being wasted.
There are more clever ways of digitizing an audio signal, which can save some of that wasted
bandwidth. A classic method is nonlinear PCM, such as µ-law encoding (named after a perceptual
curve in auditory perception research). This is like PCM on a logarithmic scale, and the effect is to
add noise that is proportional to the signal strength. Sun's .au format for sound files is a popular
example of µ-law encoding. Using 8-bit µ-law encoding would cut our one channel of CD audio
down to about 350 kbps, which is better but still pretty high, and is often audibly poorer quality than
the original (this scheme doesn't really model masking effects).
Most SBC encoders use a structure depicted in Figure 8.1, a.
Time to
Frequency
mapping
Quantizer
and
encoder
Frame
packing
Psychoacoustic
model
ISO / MPEG
audio bitstream
Digital audio
signal (PCM)
Ancillary data
a)
ISO / MPEG
audio bitstreamFrame
unpackingReconstruction
Frequency
to Time
mapping
Digital audio
signal (PCM)
Ancillary data
b)
Fig. 8.1. Basic sub-band coding scheme; (a) encoder, (b) decoder
First, a time-to-frequency mapping (a filter bank, or FFT, or something else) decomposes the
input signal into sub-bands. The number of sub-bands fluctuates from several to several tens

117
depending on the application area. For example, the G.722 ITU-T standard [69] wideband speech
codec uses only 2 sub-bands and ISO-MPEG-1 Layer 1, 2 encoders [58] use 32 sub-bands.
It has to be noted that directly formed sub-band signals, as an illustration shows in the
Figure 8.2, a, are sampled at the same sampling frequency as an input signal but their spectra are
much narrower. Therefore they become oversampled and have to be subsampled to save
computational resources. This might be performed by a bank of decimators, each of which have to
decrease sampling frequency, depending on the input signal bandwidth ratio with the corresponding
sub-band signal bandwidth, as is illustrated in Figure 8.2, a. In this case the reconstructing part should
be composed from the interpolators and synthesis filters, as depicted in the Figure 8.2, b. The task of
interpolators is to recover the initial sampling frequency by increasing it by appropriate number of
times. However real time implementation of this direct construction requires a lot of computational
resources. To resolve this ambiguity some revolutionary solutions were suggested. For example,
cosine modulated filters [68], for realization of which polyphase decomposition networks (PPDN)
and discrete (fast) Fourier transform (DFT/FFT) were adopted, what significantly accelerated the
computation of filtering and inverse filtering procedures.
Decimation
M0:1
( )s n 1( )h n
0 ( )h n
1( )Nh n
Decimation
M1:1
Decimation
MN-1:1
Analysis
filter bankDecimators
a)
Synthesis
filter bankInterpolators
( )s n
Interpolation
1:M0
Interpolation
1:M1
Interpolation
1:MN-1
1( )h n
0 ( )h n
1( )Nh n
b)
Fig. 8.2. Illustration of the sub-band decomposition and reconstruction principles (0 1 1( ), ( ), ..., ( )
Nh n h n h n
- filters
impulse responses, 0 1 1, , ...
NM M M
- sampling frequency changing times); (a) decomposition part, (b)
reconstruction part
The psychoacoustic model looks at these sub-bands as well as the original signal, and
determines masking thresholds using psychoacoustic information. Using these masking thresholds,
each of the sub-band samples is quantized and encoded so as to keep the quantization noise below
the masking threshold. The final step is to assemble all these quantized samples into frames, so that
the decoder can figure it out without getting lost.
Decoding is easier, since there is no need for a psychoacoustic model (see Figure 8.1, b). The
frames are unpacked, sub-band samples are decoded, and a frequency-to-time mapping turns them
back into a single output audio signal.
This is a basic, generic sketch of how SBC works. Notice that we haven't looked at how much
computation it takes to do this. For practical systems that need to run in real time, computation is a
major issue, and is usually the main constraint on what can be done.
8.2 MPEG Audio Layers
Over the last five to ten years, SBC systems have been developed by many of the key companies
and laboratories in the audio industry. Beginning in the late 1980's, a standardization body of the ISO
called the Motion Picture Experts Group (MPEG) developed generic standards for coding of both
audio and video for storage and transmission of various digital media. The ISO standard specifies
syntax for only the coded bit-streams and the decoding process; sufficient flexibility is allowed for
encoder implementation. The MPEG first-phase (MPEG-1) audio coder operates in single-channel or

118
two-channel stereo mode at sampling rates of 32, 44,1 , and 48 kHz and encode it at a bit rate of 32
to 192 kbps per audio channel (depending on layer) [58]. In the second phase of development,
particular emphasis is placed on the multichannel audio support and on an extension of the MPEG-1
to lower sampling rates and lower bit rates. MPEG-2 audio consists of mainly two coding standards:
MPEG-2 BC (Backward Compatibility) [59] and MPEG-2 AAC (Advanced Audio Coding) [60].
Unlike MPEG-2 BC, which is constrained by its backward compatibility (BC) with MPEG-1 format,
MPEG-2 AAC (Advanced Audio Coding) is unconstrained and can therefore provide better coding
efficiency. Not really old development is the adoption of MPEG-4 [61] for very-low-bit-rate channels,
such as those found in Internet and mobile applications. Table 8.1 lists the configuration used in
MPEG audio coding standards.
Table 8.1 List of the configuration used in MPEG audio coding standards
Standards Audio sampling rate,
kHz
Compressed bit-rate,
kbit/s
Channels Standard
approved
MPEG-1 Layer I 32, 44,1, 48 32–448 1 – 2 1992
MPEG-1 Layer II 32, 44,1, 48 32–384 1 – 2 1992
MPEG-1 Layer III 32, 44,1, 48 32–320 1 – 2 1993
MPEG-2 Layer I 32, 44,1, 48 32 – 448 for two BC channels 1 – 5.1 1994
16, 22,05, 24 32 – 256 for two BC channels
MPEG-2 Layer II 32, 44,1, 48 32 – 384 for two BC channels 1 – 5.1 1994
16, 22,05, 24 8 – 160 for two BC channels
MPEG-2 Layer III 32, 44,1, 48 32 – 384 for two BC channels 1 – 5.1 1994
16, 22,05, 24 8 – 160 for two BC channels
MPEG-2 AAC 8, 11.025, 12, 16, 22,05, 24,
32, 44,1, 48, 64, 88,2, 96
Indicated by a 23-bit unsigned
integer
1 – 48 1997
MPEG-4 T/F
coding
8, 11.025, 12, 16, 22,05, 24,
32, 44,1, 48, 64, 88,2, 96
Indicated by a 23-bit unsigned
integer
1 – 48 1999
MPEG-1 Audio is really a group of three different SBC schemes, called layers. Each layer is a
self-contained SBC coder with its own time-to-frequency mapping, psychoacoustic model, and
quantizer, as shown in the diagram above. Layer 1 is the simplest, but gives the poorest compression.
Layer 3 is the most complicated and difficult to compute, but gives the best compression.
The idea is that an application of MPEG-1 Audio can use whichever layer gives the best tradeoff
between computational burden and compression performance. Audio can be encoded in any one layer.
A standard MPEG decoder for any layer is also able to decode lower (simpler) layers of encoded
audio.
8.2.1 MPEG-1 Audio Layer 1
Basic block diagram of a MPEG-1 Audio Layer 1 is shown in Figure 8.3 [62, 63, 64].
PPN analysis
filterbank
(32 channels)
FFT
N=512
Psychoacoustic
model
Normalization,
quantization &
coding
Dynamic bit
allocation
Audio signal
(PCM) Signal-to-mask
ratio
Bit stream
formatting &
error check
Bit allocation
coding
Power spectral
density
Bit allocation
index
Scalefactors
coding
Scalefactor
index
Scalefactors
calculation
ScalefactorsSub-band
samples
Digital bitstream
Bit allocation
per sub-band
Fig. 8.3. Basic block diagram of a Layer 1 encoder
The Layer 1 time-to-frequency mapping is a polyphase filter bank with 32 sub-bands. Polyphase
filters combine low computational complexity with flexible design and implementation options. The
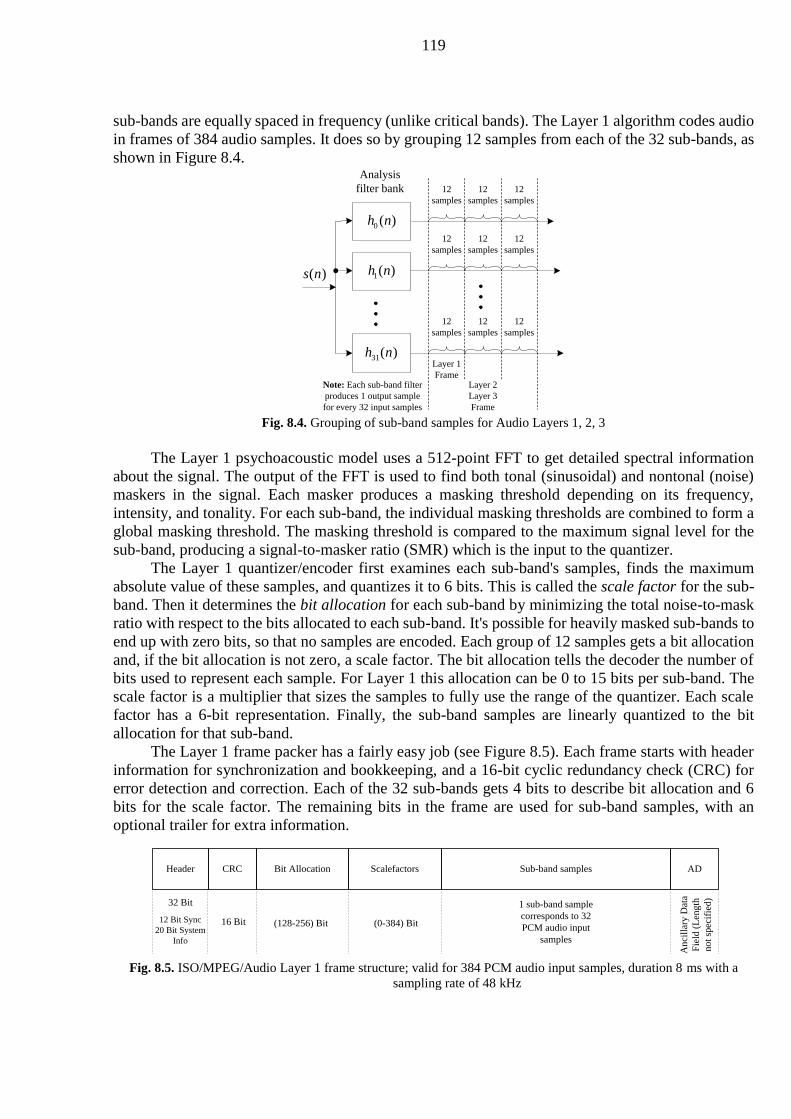
119
sub-bands are equally spaced in frequency (unlike critical bands). The Layer 1 algorithm codes audio
in frames of 384 audio samples. It does so by grouping 12 samples from each of the 32 sub-bands, as
shown in Figure 8.4.
( )s n 1( )h n
0 ( )h n
Analysis
filter bank
31( )h n
12
samples
12
samples
12
samples
12
samples
12
samples
12
samples
12
samples
12
samples
12
samples
Layer 1
FrameLayer 2
Layer 3
Frame
Note: Each sub-band filter
produces 1 output sample
for every 32 input samples Fig. 8.4. Grouping of sub-band samples for Audio Layers 1, 2, 3
The Layer 1 psychoacoustic model uses a 512-point FFT to get detailed spectral information
about the signal. The output of the FFT is used to find both tonal (sinusoidal) and nontonal (noise)
maskers in the signal. Each masker produces a masking threshold depending on its frequency,
intensity, and tonality. For each sub-band, the individual masking thresholds are combined to form a
global masking threshold. The masking threshold is compared to the maximum signal level for the
sub-band, producing a signal-to-masker ratio (SMR) which is the input to the quantizer.
The Layer 1 quantizer/encoder first examines each sub-band's samples, finds the maximum
absolute value of these samples, and quantizes it to 6 bits. This is called the scale factor for the sub-
band. Then it determines the bit allocation for each sub-band by minimizing the total noise-to-mask
ratio with respect to the bits allocated to each sub-band. It's possible for heavily masked sub-bands to
end up with zero bits, so that no samples are encoded. Each group of 12 samples gets a bit allocation
and, if the bit allocation is not zero, a scale factor. The bit allocation tells the decoder the number of
bits used to represent each sample. For Layer 1 this allocation can be 0 to 15 bits per sub-band. The
scale factor is a multiplier that sizes the samples to fully use the range of the quantizer. Each scale
factor has a 6-bit representation. Finally, the sub-band samples are linearly quantized to the bit
allocation for that sub-band.
The Layer 1 frame packer has a fairly easy job (see Figure 8.5). Each frame starts with header
information for synchronization and bookkeeping, and a 16-bit cyclic redundancy check (CRC) for
error detection and correction. Each of the 32 sub-bands gets 4 bits to describe bit allocation and 6
bits for the scale factor. The remaining bits in the frame are used for sub-band samples, with an
optional trailer for extra information.
Header CRC Bit Allocation Scalefactors Sub-band samples AD
An
cill
ary
Dat
a
Fie
ld (
Len
gth
no
t sp
ecif
ied)
12 Bit Sync
20 Bit System
Info
16 Bit (128-256) Bit (0-384) Bit
1 sub-band sample
corresponds to 32
PCM audio input
samples
32 Bit
Fig. 8.5. ISO/MPEG/Audio Layer 1 frame structure; valid for 384 PCM audio input samples, duration 8 ms with a
sampling rate of 48 kHz

120
Decoder is much simpler (see Figure 8.6). There is no psychoacoustic model. After the frames
unpacker, sub-band, scale factors and bit allocation decoders’ follows inverse quantizer, which job is
to recover original quantization levels of sub-band samples. The decoder multiplies the decoded
quantizer output with the scale factor to recover the quantized sub-band value. The dynamic range of
the scale factors alone exceeds 120 dB. The combination of the bit allocation and the scale factor
provide the potential for representing the samples with a dynamic range well over 120 dB. At least
PPN synthesis filter bank recovers output audio signal from sub-band signals.
Bit stream
unpacking
Scalefactors &
Bit allocation
decoder
Inverse
quantizer
PPN synthesis
filterbank
(32 channels)
Audio signal
(PCM)
Digital
bitstreamScalefactors
Bit allocation
Sub-band
samples decoder
Fig.8.6. Basic block diagram of a Layer 1 decoder
Layer 1 processes the input signal in frames of 384 PCM samples. At 48 kHz, each frame carries
8 ms of sound. The MPEG specification doesn't specify the encoded bit rate, allowing implementation
flexibility. Highest quality is achieved with a bit rate of 384 kbps. Typical applications of Layer 1
include digital recording on tapes, hard disks, or magneto-optical disks, which can tolerate the high
bit rate, however are mostly outdated.
Using Audio Layer 1, good quality sound can be achieved with compression ratio 1:4, what
corresponds to 384 kbps for a stereo signal.
8.2.2 MPEG-1 Audio Layer 2
Basic block diagram of a Layer 2 encoder is shown in Figure 8.7 [62, 63, 64]. The major blocks,
that are significantly changed or added to form Layer 2 encoder, are shown highlighted in Figure 8.7.
Audio signal
(PCM)
PPN analysis
filterbank
(32 channels)
FFT
N=1024
Psychoacoustic
model
Normalization,
quantization &
coding
Dynamic bit
allocation
Signal-to-mask
ratio
Bit stream
formatting &
error check
Bit allocation
coding
Power spectral
density
Bit allocation
index
Scalefactors &
selection info
coding
Scalefactor
index & scfsi
Scalefactors
calculation
ScalefactorsSub-band
samples
Digital bitstream
Scalefactors
selection
Superblock
formation
Bit allocation
per sub-band
Fig. 8.7. Basic block diagram of a Layer 2 encoder
The Layer 2 algorithm is a straightforward enhancement of Layer 1. It codes the audio data in
larger groups and imposes some restrictions on the possible bit allocations for values from the middle
and higher sub-bands. It also represents the bit allocation, the scale factor values, and the quantized
samples with more compact code. Layer 2 gets better audio quality by saving bits in these areas, so
more code bits are available to represent the quantized sub-band values.
The Layer 2 time-to-frequency mapping is the same as in Layer 1: a polyphase filter bank with
32 sub-bands. However, in a Layer 2 three blocks of 12×32 sub-band samples are combined to form
a superblock (see Figure 8.4). This means a Layer 2 audio frame is effectively triple the size of a
Layer 1 frame and contains the coded data for 1152 PCM samples compared with 384 samples for
Layer 1.

121
The Layer 2 psychoacoustic model is similar to the Layer 1 model, but it uses a 1024-point FFT
for greater frequency resolution. It uses the same procedure as the Layer 1 model to produce signal-
to-masker ratios for each of the 32 sub-bands.
The Layer 2 quantizer/encoder is similar to that used in Layer 1, generating 6-bit scale factors
for each sub-band. However, Layer 2 frames are three times as long as Layer 1 frames, so Layer 2
allows each sub-band a sequence of three successive scale factors, and the encoder uses one, when
the values of the scale factors are sufficiently close; two, or all three, when the encoder anticipates
that temporal noise masking by the human auditory system will hide any distortion caused by using
only one scale factor instead of two or three. This gives, on average, a factor of 2 reduction in bit rate
for the scale factors compared to Layer 1. The scale-factor selection information (SCFSI) field in the
Layer 2 bit stream informs the decoder if and how to share the scale factor values. Generally speaking
a more sophisticated method of scale factor coding is adopted in Layer 1. Bit allocations are computed
in a similar way to Layer 1. However the number of allowable quantizer step sizes is reduced for mid
and high frequency sub-bands resulting in a saving in the bits used for the bit allocation code words.
The Layer 2 frame packer uses the same header and CRC structure as Layer 1 (see Figure 8.8).
The number of bits used to describe bit allocations varies with sub-band: 4 bits for the low sub-bands,
3 bits for the middle sub-bands, and 2 bits for the high sub-bands (this follows critical bandwidths).
The scale factors (one, two or three depending on the data) are encoded along with a 2-bit code
describing which combination of scale factors is being used. The sub-band samples are quantized
according to bit allocation, and then combined into groups of three (called granules). Each granule is
encoded with one code word. This allows Layer 2 to capture much more redundant signal information
than Layer 1.
Header CRC Bit Allocation Scalefactors Sub-band samples AD
Anci
llar
y D
ata
Fie
ld (
Len
gth
not
spec
ifie
d)
12 Bit Sync
20 Bit
System Info
16 Bit
Low sub-bands
4 Bit linear 12 granules of 3 sub-band samples each.
3 sub-band samples correspond to 96
PCM audio input samplesMid sub-bands
3 Bit linearHigh sub-bands
2 Bit linear
SCFSI
(0-60) BitGr0 Gr11
32 Bit (26-188) Bit (0-1080) Bit
Fig. 8.8. ISO/MPEG/Audio Layer 2 frame structure; valid for 1152 PCM audio input samples, duration 24 ms with a
sampling rate of 48 kHz
Layer 2 processes the input signal in frames of 1152 PCM samples. At 48 kHz sampling
frequency, each frame carries 24 ms of sound. Highest quality is achieved with a bit rate of 256 kbps,
but quality is often good down to 64 kbps. Compression degree is equal to 12 with 64 kbps output bit
rate and 768 kbps input bit rate (48 kHz sampling frequency and 16 bit code words).
Typical applications of Layer 2 include audio broadcasting, television, consumer and
professional recording, and multimedia. Audio files on the World Wide Web with the extension
.mpeg2 or .mp2 are encoded with MPEG-1 Layer 2.
Using Audio Layer 2, good quality sound can be achieved with compression ratio 1:6...1:8,
what corresponds to 256..192 kbps for a stereo signal.
8.2.3 MPEG-1 Audio Layer 3
Basic block diagram of a Layer 3 encoder is shown in Figure 8.9 [62, 63, 64].

122
Audio signal
(PCM)
PPN analysis
filterbank
FFT
N=1024
...
MDCT with
Dynamic
Windowing
... Scaler &
Quantizer ... Huffman
encoder ...
Bit stream
formatting &
error check
Psychoacoustic
model
Coding of Side
Information
Digital
bitstream
Bit resevoir
Fig. 8.9. Basic block diagram of a Layer 3 encoder
Layer 3 is substantially more complicated than Layer 2. It is the most aggressive compression
scheme and the most ubiquitous today. It uses both polyphase and discrete cosine transform filter
banks, a polynomial prediction psychoacoustic model, and sophisticated quantization and encoding
schemes allowing variable length frames. The frame packer includes a bit reservoir (buffer) which
allows more bits to be used for portions of the signal that need them.
Layer 3 is intended for applications where a critical need for low bit rate justifies the expensive
and sophisticated encoding system. It allows high quality results at bit rates as low as 64 kbps. Typical
applications are in telecommunication and professional audio, such as commercially published music
and video.
The Layer 3 algorithm is a much more refined approach derived from ASPEC (audio spectral
perceptual entropy coding) and OCF (optimal coding in the frequency domain) algorithms [65, 66].
Although based on the same filter bank found in Layer 1 and Layer 2, Layer 3 compensates for some
filter bank deficiencies by processing the filter outputs with a modified discrete cosine transform
(MDCT) [44]. Figure 8.10 shows a block diagram of this processing for the encoder.
( )s n 1( )h n
0 ( )h n
Analysis
filter bank
31( )h n
MDCT
window
MDCT
window
MDCT
window
MDCT
MDCT
MDCT
All
ias
reduct
ion (
only
for
long b
lock
s)
Long, long-to-short,
short, short-to-long
window select
Long or short block
control (from
psychoacoustic model)
0
1
31
0
1
31
0
18
18
0
0
18
0
575
Fig. 8.10. MPEG Audio Layer 3 filter bank processing
Unlike the polyphase filter bank, without quantization the MDCT transformation is lossless.
The MDCTs further subdivide the sub-band outputs in frequency to provide better spectral resolution.
Furthermore, once the sub-band components are subdivided in frequency, the Layer 3 encoder can
partially cancel some aliasing caused by the polyphase filter bank. Of course, the Layer 3 decoder has
to undo the alias cancellation so that the inverse MDCT can reconstruct sub-band samples in their
original, aliased form for the synthesis filter bank. Layer 3 specifies two different MDCT block
lengths: a long block of 18 samples or a short block of 6.
Before processing the filter outputs with MDCT, they are windowed by half period sine wave
form windows (see Figure 8.11). There is a 50-percent overlap between successive transform
windows, so the window size is 36 and 12 samples, respectively. The long block length allows greater

123
frequency resolution for audio signals with stationary characteristics, while the short block length
provides better time resolution for transients. Note the short block length is one third that of a long
block. In the short block mode, three short blocks replace a long block so that the number of MDCT
samples for a frame of audio samples remains unchanged regardless of the block size selection. For
a given frame of audio samples, the MDCTs can all have the same block length (long or short) or a
mixed block mode. In the mixed block mode the MDCTs for the two lower frequency sub-bands have
long blocks, and the MDCTs for the 30 upper sub-bands have short blocks. This mode provides better
frequency resolution for the lower frequencies, where it is needed the most, without sacrificing time
resolution for the higher frequencies. The switch between long and short blocks is not instantaneous.
A long block with a specialized long-to-short or short-to-long data window serves to transition
between long and short block types. Figure 8.11 shows how the MDCT windows transition between
long and short block modes.
Time
18
sam
ple
s
12
sam
ple
s
6 s
amp
les
36 samples
18 samples 18 samples
12
sam
ple
s
Amplitude ShortLong Long-to-Short Short-to-Long
Fig. 8.11. MDCT window types and arrangement of transition between overlapping long and short window types
Because MDCT processing of a sub-band signal provides better frequency resolution, it
consequently has poorer time resolution. The MDCT operates on 12 or 36 polyphase filter samples,
so the effective time window of audio samples involved in this processing is 12 or 36 times larger.
The quantization of MDCT values will cause errors spread over this larger time window, so it is more
likely that this quantization will produce audible distortions. Such distortions usually manifest
themselves as pre-echo because the temporal masking of noise occurring before a given signal is
weaker than the masking of noise after. Layer 3 incorporates several measures to reduce pre-echo.
First, the Layer 3 psychoacoustic model has modifications to detect the conditions for pre-echo.
Second, Layer 3 can borrow code bits from the bit reservoir to reduce quantization noise when pre-
echo conditions exist. Finally, the encoder can switch to a smaller MDCT block size to reduce the
effective time window. Besides the MDCT processing, other enhancements over the Layer 1 and
Layer 2 algorithms include the following.
Alias reduction. Layer 3 specifies a method of processing the MDCT values to remove some
artifacts caused by the overlapping bands of the polyphase filter bank.
Nonuniform quantization. The Layer 3 quantizer raises its input to the 3/4 power before
quantization to provide a more consistent signal-to-noise ratio over the range of quantizer values. The
requantizer in the MPEG/audio decoder relinearizes the values by raising its output to the 4/3 power.
Scale factor bands. Unlike Layers 1 and 2, where each sub-band can have a different scale
factor, Layer uses scale factor bands. These bands cover several MDCT coefficients and have
approximately critical band widths. In Layer 3 scale factors serve to color the quantization noise to
fit the varying frequency contours of the masking threshold. Values for these scale factors are adjusted
as part of the noise allocation process.
Entropy coding of data values. To get better data compression, Layer 3 uses variable-length
Huffman codes to encode the quantized samples. After quantization, the encoder orders the 576 (32
sub-bands×18 MDCT coefficients/sub-band) quantized MDCT coefficients in a predetermined order.
The order is by increasing frequency except for the short MDCT block mode. For short blocks there
are three sets of window values for a given frequency, so the ordering is by frequency, then by
window, within each scale factor band. Ordering is advantageous because large values tend to fall at
the lower frequencies and long runs of zero or near-zero values tend to occupy the higher frequencies.
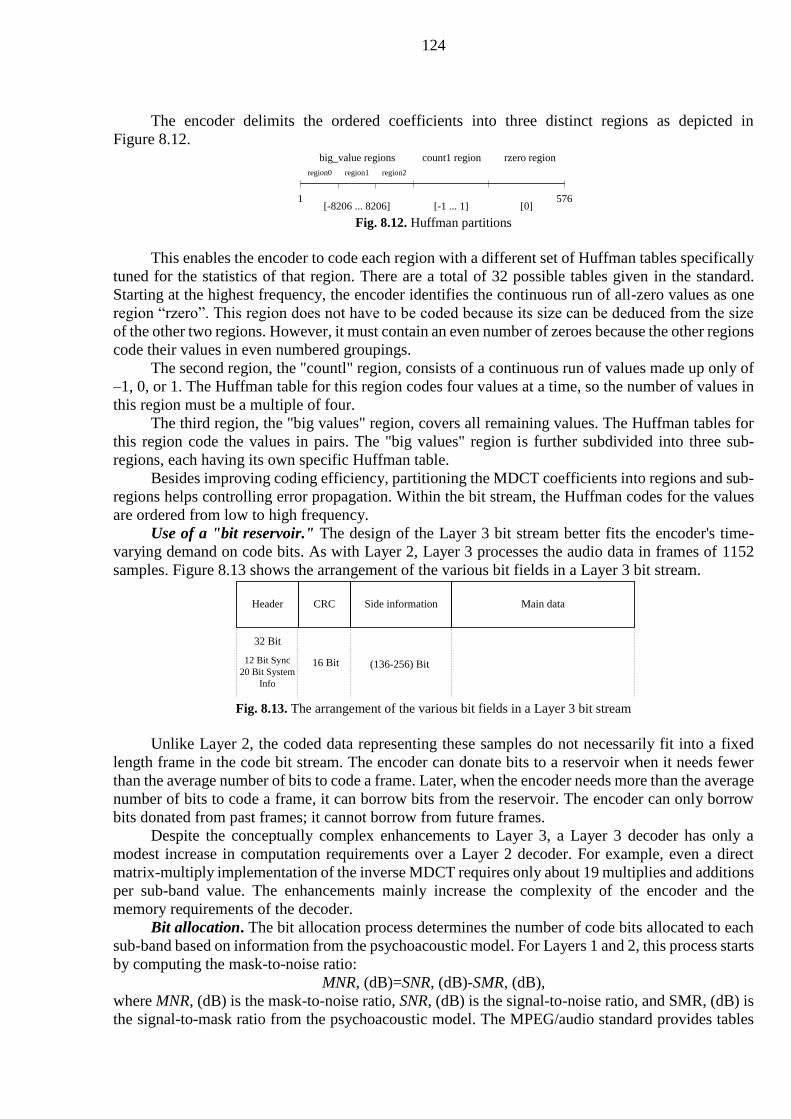
124
The encoder delimits the ordered coefficients into three distinct regions as depicted in
Figure 8.12.
1 576
region0 region1 region2
big_value regions count1 region rzero region
[-8206 ... 8206] [-1 ... 1] [0] Fig. 8.12. Huffman partitions
This enables the encoder to code each region with a different set of Huffman tables specifically
tuned for the statistics of that region. There are a total of 32 possible tables given in the standard.
Starting at the highest frequency, the encoder identifies the continuous run of all-zero values as one
region “rzero”. This region does not have to be coded because its size can be deduced from the size
of the other two regions. However, it must contain an even number of zeroes because the other regions
code their values in even numbered groupings.
The second region, the "countl" region, consists of a continuous run of values made up only of
–1, 0, or 1. The Huffman table for this region codes four values at a time, so the number of values in
this region must be a multiple of four.
The third region, the "big values" region, covers all remaining values. The Huffman tables for
this region code the values in pairs. The "big values" region is further subdivided into three sub-
regions, each having its own specific Huffman table.
Besides improving coding efficiency, partitioning the MDCT coefficients into regions and sub-
regions helps controlling error propagation. Within the bit stream, the Huffman codes for the values
are ordered from low to high frequency.
Use of a "bit reservoir." The design of the Layer 3 bit stream better fits the encoder's time-
varying demand on code bits. As with Layer 2, Layer 3 processes the audio data in frames of 1152
samples. Figure 8.13 shows the arrangement of the various bit fields in a Layer 3 bit stream.
Header CRC Side information Main data
12 Bit Sync
20 Bit System
Info
16 Bit (136-256) Bit
32 Bit
Fig. 8.13. The arrangement of the various bit fields in a Layer 3 bit stream
Unlike Layer 2, the coded data representing these samples do not necessarily fit into a fixed
length frame in the code bit stream. The encoder can donate bits to a reservoir when it needs fewer
than the average number of bits to code a frame. Later, when the encoder needs more than the average
number of bits to code a frame, it can borrow bits from the reservoir. The encoder can only borrow
bits donated from past frames; it cannot borrow from future frames.
Despite the conceptually complex enhancements to Layer 3, a Layer 3 decoder has only a
modest increase in computation requirements over a Layer 2 decoder. For example, even a direct
matrix-multiply implementation of the inverse MDCT requires only about 19 multiplies and additions
per sub-band value. The enhancements mainly increase the complexity of the encoder and the
memory requirements of the decoder.
Bit allocation. The bit allocation process determines the number of code bits allocated to each
sub-band based on information from the psychoacoustic model. For Layers 1 and 2, this process starts
by computing the mask-to-noise ratio:
MNR, (dB)=SNR, (dB)-SMR, (dB),
where MNR, (dB) is the mask-to-noise ratio, SNR, (dB) is the signal-to-noise ratio, and SMR, (dB) is
the signal-to-mask ratio from the psychoacoustic model. The MPEG/audio standard provides tables

125
that give estimates for the signal-to-noise ratio resulting from quantizing to a given number of
quantizer levels. In addition, designers can try other methods of getting the signal-to-noise ratios.
Once the bit allocation unit has mask-to-noise ratios for all the sub-bands, it searches for the
sub-band with the lowest mask-to-noise ratio and allocates code bits to that sub-band. When a sub-
band gets allocated more code bits, the bit allocation unit looks up the new estimate for the signal-to-
noise ratio and re-computes that sub-band's mask-to-noise ratio. The process repeats until no more
code bits can be allocated.
The Layer 3 encoder uses noise allocation. The encoder iteratively varies the quantizers in an
orderly way, quantizes the spectral values, counts the number of Huffman code bits required to code
the audio data, and actually calculates the resulting noise. If, after quantization, some scale factor
bands still have more than the allowed distortion, the encoder amplifies the values in those scale
factor bands and effectively decreases the quantizer step size for those bands. Then the process
repeats. The process stops if any of the following three conditions is true:
None of the scale-factor bands have more than the allowed distortion;
The next iteration would cause the amplification for any of the bands to exceed the maximum
allowed value;
The next iteration would require all the scale factor bands to be amplified.
Real time encoders also can include a time limit exit condition for this process.
Iterative control of quantization and coding. The process to find the optimum gain and
scalefactors for a given block, bit rate and output from the perceptual model is usually done by two
nested iteration loops in an analysis-by-synthesis way:
Inner iteration loop (rate loop). The Huffman code tables assign shorter code words to
(more frequent) smaller quantized values. If the number of bits resulting from the coding
operation exceeds the number of bits available to code a given block of data, this can be
corrected by adjusting the global gain to result in a larger quantization step size, leading to
smaller quantized values. This operation is repeated with different quantization step sizes until
the resulting bit demand for Huffman coding is small enough. The loop is called rate loop
because it modifies the overall coder rate until it is small enough.
Outer iteration loop (noise control loop). To shape the quantization noise according to
the masking threshold, scalefactors are applied to each scalefactor band. The systems starts with
a default factor of 1,0 for each band. If the quantization noise in a given band is found to exceed
the masking threshold (allowed noise) as supplied by the perceptual model, the scalefactor for
this band is adjusted to reduce the quantization noise. Since achieving a smaller quantization
noise requires a larger number of quantization steps and thus a higher bit rate, the rate
adjustment loop has to be repeated every time new scalefactors are used. In other words, the
rate loop is nested within the noise control loop. The outer (noise control) loop is executed until
the actual noise (computed from the difference of the original spectral values minus the
quantized spectral values) is below the masking threshold for every scalefactor band (i.e.,
critical band). While the inner iteration loop always converges (if necessary, by setting the
quantization step size large enough to zero out all spectral values), this is not true for the
combination of both iteration loops. If the perceptual model requires quantization step sizes so
small that the rate loop always has to increase them to enable coding at the required bit rate,
both can go on forever. To avoid this situation, several conditions to stop the iterations early
can be checked. However, for fast encoding and good coding results this condition should be
avoided. This is one reason why an MPEG Layer-3 encoder (the same is true for AAC) usually
needs tuning of perceptual model parameter sets for each bit rate.
Stereo redundancy coding. The MPEG/audio compression algorithm supports two types of
stereo redundancy coding: intensity stereo coding and middle/side (M/S) stereo coding. All layers
support intensity stereo coding. Layer 3 also supports M/S stereo coding.

126
Both forms of redundancy coding exploit another perceptual property of the human auditory
system. Psychoacoustic results show that above about 2 kHz and within each critical band, the human
auditory system bases its perception of stereo imaging more on the temporal envelope of the audio
signal than on its temporal fine structure.
In intensity stereo mode the encoder codes some upper frequency sub-band outputs with a single
summed signal instead of sending independent left- and right-channel codes for each of the 32 sub-
band outputs. The intensity stereo decoder reconstructs the left and right channels based only on a
single summed signal and independent left and right channel scale factors. With intensity stereo
coding, the spectral shape of the left and right channels is the same within each intensity coded sub-
band, but the magnitude differs.
The MS stereo mode encodes the left and right channel signals in certain frequency ranges as
middle (sum of left and right) and side (difference of left and right) channels. In this mode, the encoder
uses specially tuned threshold values to compress the side channel signal further.
Using Audio Layer 3, good quality sound can be achieved with compression ratio 1:10...1:12,
what corresponds to 128..112 kbps for a stereo signal.
8.3 MPEG-2 Audio
The MPEG-1 Audio standard includes a lot more developments than is discussed above. For
one thing, it allows two channels, which can be encoded separately or as joint stereo, which encodes
both channels of stereo together for further savings.
MPEG-2 denotes the second phase of MPEG. It introduced a lot of new concepts into MPEG
video coding including support for interlaced video signals. The main application area for MPEG-2
is digital television. The original (finalized in 1994) MPEG-2 Audio standard [59] just consists of
two extensions to MPEG-1:
• Backwards compatible (BC) multichannel coding adds the option of forward and backwards
compatible coding of multichannel signals including the 5.1 channel configuration known
from cinema sound (for movies which have left, right, center, and two surround channels)
plus a subwoofer channel. This multichannel extension leads to an improved realism of
auditory ambience not only for audio only applications, but also for high-definition
television (HDTV) and digital versatile disc (DVD).
• Coding at lower sampling frequencies adds sampling frequencies of 16 kHz, 22,05 kHz and
24 kHz to the sampling frequencies supported by MPEG-1. This adds coding efficiency at
very low bit rates.
Generally speaking, regarding syntax and semantics, the differences between MPEG-1 and
MPEG-2 BC are minor, except in the latter case for the new definition of a sampling frequency field,
a bit rate index field, and a psychoacoustic model used in bit allocation tables. In addition, parameters
of MPEG-2 BC have to be changed accordingly. With the extension of lower sampling rates, it is
possible to compress two-channel audio signals to bit rates less than 64 kbps with good quality.
Backward compatibility implies that existing MPEG-1 audio decoders can deliver two main channels
of the MPEG-2 BC coded bit stream. This is achieved by coding the left and right channels as MPEG-
1, while the remaining channels are coded as ancillary data in the MPEG-1 bit stream.
Both extensions do not introduce new coding algorithms over MPEG-1 Audio. The
multichannel extension contains some new tools for joint coding techniques.
However in early 1994 it was shown that introducing new coding algorithms and giving up
backwards compatibility to MPEG-1 a significant improvement in coding efficiency (for the five
channel case) could be reached. As a result, a new work item defined as MPEG-2 Advanced Audio
Coding (AAC) [67, 69] was introduced. AAC is a second generation audio coding scheme for generic
coding of stereo and multichannel signals.

127
8.3 MPEG-2 Advanced Audio Coding
Advanced Audio Coding (AAC) is a standardized, lossy compression and encoding scheme for
digital audio. Designed to be the successor of the MP3 format, AAC generally achieves better sound
quality than MP3 at similar bit rates. AAC has been standardized by ISO and IEC, as part of the
MPEG-2 and MPEG-4 specifications.
AAC supports inclusion of 48 full-bandwidth (up to 96 kHz) audio channels in one stream plus
16 low frequency effects (limited to 120 Hz) channels, up to 16 "coupling" or dialog channels, and
up to 16 data streams. The quality for stereo is satisfactory to modest requirements at 96 kbitps in
joint stereo mode; however, Hi-Fi transparency demands data rates of at least 128 kbitps. The MPEG-
2 audio tests showed that AAC meets the requirements referred to as "transparent" for the ITU at
128 kbitps for stereo and 320 kbitps for 5.1 audio.
MPEG-2 AAC provides the highest quality for applications where backward compatibility with
MPEG-1 is not a constraint. While MPEG-2 BC provides good audio quality at data rates of 640-
896 kbps for five full-bandwidth channels, MPEG-2 AAC provides very good quality at less than half
of that data rate.
AAC is the default or standard audio format for YouTube, iPhone, iPod, iPad, Nintendo DSi,
Nintendo 3DS, iTunes, DivX Plus Web Player and PlayStation 3. It is supported on PlayStation Vita,
Wii (with the Photo Channel 1.1 update installed), Sony Walkman MP3 series and later, Sony
Ericsson; Nokia, Android, BlackBerry, and webOS-based mobile phones, with the use of a converter,
and the MPEG-4 video standard. AAC also continues to enjoy increasing adoption by manufacturers
of in-dash car audio systems. AAC can be used on HDTV, DVB, iTunes and iPod, iPhone, iPad,
Apple TV, mobile phone, PDA and so on. It is possible to play AAC on FFDShow, the KM Player,
Winamp, VLC, iTunes, Windows Media Player, XBMC, etc.
Figure 8.14 shows a block diagram of an MPEG-2 Advanced Audio Coder (AAC) encoder.
Gain
control
Filter
bank
Intensity
coding/
Coupling
TNS M/SScale
factorsQuantizer
Noiseless
coding
Adaptive
prediction
Rate/Distortion iterative control
Coding of side information
Psychoacustic model
Audio signal
(PCM)
Bit stream
formatting
& error
check
Digital
bitstream
Bit resevoir
Fig. 8.14. Structure of MPEG-2 advanced audio coder
AAC follows the same basic coding paradigm as Layer-3 (high frequency resolution filter bank,
nonuniform quantization, Huffman coding, iteration loop structure using analysis-by-synthesis), but
improves on Layer-3 in a lot of details and uses new coding tools for improved quality at low bit
rates.
The gain control tool splits the input signal into four equally spaced frequency bands, which
are then flexibly encoded to fit into a variety of sampling rates. The pre-echo effect can also be
alleviated through the use of the gain control tool. The filter bank transforms the signals from the
time domain to the frequency domain. The temporal noise shaping (TNS) tool helps to control the
temporal shape of the quantization noise. Intensity coding and the coupling reduce perceptually
irrelevant information by combining multiple channels in high frequency regions into a single
channel. The second order backward adaptive prediction tool further improves coding efficiency by
removing the redundancies between adjacent frames. The predictor reduces the bit rate for coding
subsequent sub-band samples in a given sub-band, and it bases its prediction on the quantized
spectrum of the previous block, which is also available in the decoder, of course in the absence of

128
channel errors. M/S coding removes stereo redundancy based on coding the sum and difference signal
instead of the left and right channels. Other units, including quantization, variable length coding,
psychoacoustic model, and bit allocation, are similar to those used in MPEG Layer 3.
In order to serve different needs, MPEG-2 AAC offers flexibility for different quality and
complexity tradeoffs by defining three profiles: the main profile, the low-complexity profile, and the
sampling rate scalable (SRS) profile. Each profile builds on some combinations of different tools as
listed in Table 8.2.
Table 8.2 Coding tools used in MPEG-2 AAC
Tools Main Low complexity SRS
Variable-Length Decoding yes yes yes
Inverse Quantizer yes yes yes
M/S yes yes yes
Prediction yes no no
Intensity/Coupling yes no no
TNS yes Limited Limited
Filterbank yes yes yes
Gain Control no no yes
The main profile yields the highest coding efficiency by incorporating all the tools with the
exception of the gain control tool. For example, in the main profile the filter bank is a 1024-line
MDCT with 50 % overlap (block length of 2048 samples). The filter bank is switchable to eight 128-
line MDSTs (block lengths of 256 samples). Hence, it allows for a frequency resolution of 23,43 Hz
and a time resolution of 2,6 ms (both a sampling rate of 48 kHz). In the case of the long block length,
the window shape can vary dynamically as a function of the signal.
The low complexity profile is used for applications where memory and computing power are
constrained. It does not employ temporal noise shaping and time domain prediction as one of the most
complex calculation procedures.
The SRS profile offers a scalable complexity by allowing partial decoding of a reduced audio
bandwidth. In this profile a hybrid filter bank is used.
MPEG 2 AAC supports up to 46 channels for various multichannel loudspeaker configurations
and other applications. The default loudspeaker configurations are the monophonic channel, the
stereophonic channel, and the 5.1 system (five channels plus LFE channel).
Tools to enhance coding efficiency.
The following changes compared to Layer-3 help to get the same quality at lower bit-rates:
• Higher frequency resolution. The number of frequency lines in AAC is up to 1024
compared to 576 for Layer-3
• Prediction. An optional backward prediction, computed line by line, achieves better
coding efficiency especially for very tone-like signals (e.g. pitch pipe). This feature is only
available within the rarely used main profile.
• Improved joint stereo coding. Compared to Layer-3, both the Mid/Side coding and the
intensity coding are more flexible, allowing applying them to reduce the bit rate more
frequently.
• Improved Huffman coding. In AAC, coding by quadruples of frequency lines is applied
more often. In addition, the assignment of Huffman code tables to coder partitions can be much
more flexible.
Tools to enhance audio quality
There are other improvements in AAC which help to retain high quality for classes of very
difficult signals.

129
• Enhanced block switching. Instead of the hybrid (cascaded) filter bank in Layer-3, AAC
uses a standard switched MDCT filter bank with an impulse response (for short blocks) of
5,3 ms at 48 kHz sampling frequency. This compares favorably with Layer-3 at 18,6 ms and
reduces the amount of pre-echo artifacts (see below for an explanation).
• Temporal Noise Shaping, TNS. This technique does noise shaping in time domain by
doing an open loop prediction in the frequency domain. TNS is a new technique which proves
to be especially successful for the improvement of speech quality at low bit rates.
With the sum of many small improvements, AAC reaches on average the same quality as Layer-
3 at about 70 % of the bit rate. Using an encoder with good performance, both Layer-3 and MPEG-2
Advanced Audio Coding can compress music while still preserving near-CD or CD quality [70].
Among the two systems, Layer-3 is at somewhat lower complexity. AAC is its successor, providing
near-CD quality at larger compression rates. This increases the playing time of flash memory based
devices by nearly 50% while maintaining the same quality compared to Layer-3 and enables higher
quality encoding and playback up to high definition audio at 96 kHz sampling rate.
8.5 Main Characteristics of MPEG-4 Audio
The MPEG-4 standard [61], which was finalized in 1999, integrates the whole range of audio
from high-fidelity speech coding and audio coding down to synthetic speech and synth audio. The
MPEG-2 ACC tool set within the MPEG-4 standard supports the compression of natural audio at bit
rates ranging from 2 up to 64 kbps. The MPEG-4 standard defines three types of coders: parametric
coding, code-excited linear predictive (CELP) coding, and time/frequency (T/F) coding. For speech
signals sampled at 8 kHz, parametric coding is used to achieve targeted bit rates between about 2 and
6 kbps. For audio signals sampled at 8 and 16 kHz, CELP coding offers good quality at medium bit
rates between about 6 and 24 kbps.
T/F coding is typically applied to the bit rates starting at about 16 kbps for audio signals with
bandwidths above 8 kHz. T/F coding is developed based on the coding tools used in MPEG-2 AAC
with some add-ons. One is referred to as the twin-VQ (vector quantization), which makes combined
use of an interleaved VQ and LPC (Linear Predictive Coding) spectral estimation. In addition, the
introduction of bit-sliced arithmetic coding (BSAC) offers noiseless transcoding of an AAC stream
into a fine granule scalable stream between 16 and 64 kbps per channel. BSAC enables the decoder
to stop anywhere between 16 kbps and the bit rate arranged in 1 kbps steps.

130
9. FORMATION of DVB DIGITAL STREAMS This chapter deals with the formation principles of multimedia programs and of MPEG
transport stream structure, which will be later used for demultiplexing and decompression in a digital
TV receiver.
9.1 Characteristics of ISO/IEC 13818 standard
ISO/IEC 13818 standard [71] describes the composition principles of a multimedia program,
which is comprised of video and audio signals, compressed by MPEG algorithm, and control data. It
also describes how these components have to be multiplexed into synchronized broadcasting stream
(see Figure 9.1). So composed stream can be transmitted over various transmission media, i.e.:
VHF (30-300 MHz) radio frequency band;
UHF (300-3000 MHz) radio frequency band;
Satellite communication channels;
Cable networks;
Standard terrestrial channels using E1 (2 Mbps) or E3 (34 Mbps) formats for digital
transmission based on the Plesynchronous Digital Hierarchy (PDH) technology;
Standard terrestrial channels with the Synchronous Digital Hierarchy (SDH) technology;
Wireless communication channels;
ADSL wired and optical communication lines;
Packet Switching Network (ATM, IP, IPv6, Ethernet).
The data transmission modes over these media can be: simplex, full duplex (using feedback
schemes), unicast, multicast or broadcast to all receivers, according to packet identifier (PID).
TV studio,
program creators
Server
MPEG2
stream
formation
processor
MPEG2
transport and
program
streams
multiplexer
FEC block
and QAM
moduliator
DVB-T
receiver
DVB-T
receiver
Fig. 9.1. A typical digital TV transmission setup
According to the DVB specification data can be transmitted by using five different modes:
Data pipe mode. In this case data segments are packed into containers and delivered to
their destination;
Data stream mode. In this case data constitute a continuous stream which can be
asynchronous (without additional sync signals), synchronous (with sync signals) or
synchronize-able (with sync symbols inserted and data are packed into packet streams);
Multiprotocol encapsulation (MPE) mode. In this case the Digital Storage Media
Command and Control (DSM-CC) technology is applied by emulating Local Area Network
(LAN) functions;
Data carrousel mode. In this case the content of the transmission stream is provided in a
cyclic fashion and placed into cyclic buffer from which data transmission is periodically

131
performed. Data in the buffer can be of any format or type. This principle is used to realize
Electronic Programm Guide (EPG) using fixed length DSM-CC frames.
Object carrousel mode. These carrousels are similar to the data carrousels but are
designed for receivers according to the corresponding packet identification field (PID)
(usually for STB decoders). Herein data are formatted according to DVB specification.
9.2 MPEG-2 video compression standard
MPEG-2 video compression [72] relies on block coding based on the DCT. Specifically, each
frame is divided into 8×8 blocks that are transformed using DCT. Quantization on the transformed
blocks is obtained by dividing the transformed pixel values by corresponding elements of a
quantization matrix and rounding the ratio to the nearest integer. The transformed and quantized block
values are scanned using zig-zag pattern to yield a one-dimensional sequence of the entire frame. A
hybrid variable length coding scheme that combines Huffman coding and run-length coding is used
for symbol encoding
The procedure outlined is used for both intraframe and interframe coding. Intraframe coding is
used to represent an individual frame independently. The scheme used for intraframe coding is
essentially identical to JPEG image compression. An intraframe coded picture in the video sequence
is referred to as intra-picture (I-picture),
Interframe picture is used to increase compression by exploiting temporal redundancy. Motion
compensation is used to predict the content of the frame. Coding of its residual error represents the
predicted frame. The frame is divided into 16×16 macroblocks (2×2 blocks). An optimal match of
each macroblock in the neighboring frame is determined. A motion vector is used to represent the
offset between the macroblock and its best-match in the neighboring frame. A residual error is
computed by subtracting the macroblock from its best-match in the neighboring frame. Coding of the
residual error image is carried out in the same manner as intraframe coding. Coding of the motion
vector field is performed separately using difference coding and variable length coding. An interframe
coded picture in the video sequence that restricts the search to the previous frame is referred to as
predicted picture (P-picture); whereas, those pictures that allow for either the previous or subsequent
frames is referred to as a bidirectional picture (B-picture).
Rows of macroblocks in the picture are called slices. The collection of slices forms a picture.
Groups of pictures (GOP) refer to sequences of pictures. A GOP is used to specify a group of
consecutive frames and their picture types. For example, a typical GOP may consist of 15 frames
with the following picture types: IBBPBBPBBPBBPBB. This scheme would allow for random access
and error propagation that does not exceed intervals of one half second assuming the video streamed
at a rate of 30 frames per second.
9.3 Construction of MPEG bit streams
MPEG-2 has two different multiplexing schemes: program stream and transport stream [41].
The program streams are mostly used in error free environment as storage applications. Broadcast
usage commonly uses the transport stream format. If you have one content channel (one program), it
does not imply that the stream that carries the program would be a program stream. In broadcast usage
it would be a so-called single program transport stream (as defined by ISO 13818-1): a multiplexed
collection of concatenated program streams without beginning or end. Transport stream is superior
to program stream for streaming applications. An MPEG-2 program stream contains one, and only
one, content channel. An MPEG-2 transport stream can contain one or more content channels.
Program and transport streams are composed of a combination of separate components, called
elementary streams (ES). An elementary stream (ES) as defined by MPEG communication protocol
is usually the output of an audio or video encoder. ES contains only one kind of data, e.g. audio, video
or closed caption. An elementary stream is often referred to as "elementary", "data", "audio" or

132
"video" bit streams or streams. The format of the elementary stream depends upon the codec or data
carried in the stream, but will often carry a common header when packetized into a packetized
elementary stream (PES). Within the elementary stream the following are stored:
Digital control data;
Compressed audio signals;
Compressed video signals;
Digital synchronous and asynchronous data.
The segments of audio and video signals are grouped into packets, usually called coded video
or audio frames. After that ES are sent into specific processor which packs them into higher hierarchy
stream, called packetized elementary stream (PES).
A typical method of transmitting elementary stream data from a video or audio encoder is to
first create PES packets from the elementary stream data and then to encapsulate these PES packets
inside transport stream (TS) packets or program stream (PS) packets (see Figure 9.2). The PS mode
permits multiplexing PESs that share a common time base, using variable length packets. The TS
mode permits multiplexing PESs and PSs that do not necessarily share a common time base, using
fixed length (188 bytes) packets. The TS packets can then be transmitted using broadcasting
techniques, such as those used in DVB.
Transport streams and program streams are each logically constructed from PES packets. PES
packets shall be used to convert between transport streams and program streams.
Video
encoder
Audio
encoder
Video
packetizer
Audio
packetizer
Transport
stream
multiplexer
Program
stream
multiplexer
Video
signal
Audio
signal
Transport stream
(to broadcasting system)
Program stream
(to storage media)
Video
PES
Audio
PES
ClockProgram clock
reference
Fig. 9.2. MPEG-2 audio and video systems at transmission side
9.3.1 MPEG-2 elementary stream
An elementary stream (ES) as defined by MPEG communication protocol is usually the output
of an audio or video encoder [75]. ES contains only one kind of data, e.g. audio, video or closed
caption. An elementary stream is often referred to as "elementary", "data", "audio", or "video" bit
streams. The format of the elementary stream depends upon the codec or data carried in the stream,
but will often carry a common header when packetized into a packetized elementary stream. The
structure of the video ES format is dictated by the nested MPEG-2 compression standard: video
sequence, GOP, pictures, slices, and macroblocks. The video ES is defined as a collection of picture
from one source. An illustration of the video ES format is presented in Figure 9.3 [75]. The shaded
segment of the video ES format presented in Figure 9.3 is used to denote that that any permutation of
the fields within this segment can be repeated as specified by the video compression standard.
Sequence
header
Sequence
extention
Extention
and user
data 0
Group of
picture
header
Extention
and user
data 1
Picture
header
Picture
coding
extention
Extention
and user
data 2
Picture data
containing
slices
Slices data
containing
macroblocks
Sequence
end
Fig. 9.3. Video elementary stream format
The content of video elementary stream header is shown in Figure 9.4 [75]

133
Start
code,
32 bits
Horizontal
size,
12 bits
Vertical
size,
12 bits
Aspect
ratio,
4 bits
Frame
rate code,
4 bits
Bit
rate,
18 bits
Marker
bit, 1 bit
(ever 1)
Video buffer
verifier size,
10 bits
Constraint
parameters
flag, 1 bit
Load intra
quantizer
matrix, 1 bit
Intra quantizer
matrix, 0 or
64*8 bits
Non intra
quantizer matrix,
0 or 64*8 bits
Load non intra
quantizer
matrix, 1 bit
Fig. 9.4. Header for MPEG-2 video elementary stream
9.3.2 MPEG-2 packetized elementary stream
PES can have fixed or variable (up to 65536 bytes) length. PES is usually constructed in such
way that it would be composed of integer number of packets (see Figure 9.5) [73. 75].
Packet start
code prefix,
24 bits
Stream ID,
8 bits
Original
or copy,
1 bit
Optional PES header,
variable length
PES data
bytes
Marker
bits „10",
2 bits
PES
scrambling
control,
2 bits
PES
priority,
1 bit
Data
alignment
indicator,
1 bit
Copyright,
1 bit
PES packet
length,
16 bits
7 flags,
8 bits
PES header
data length,
8 bits
Optional
fields 1
Stuffing
bytes,
variable
length
PES CRC
flag,
1 bit
PTS
DTS
indicator
2 bits
ESCR flag,
1 bit
ES rate flag,
1 bit
DSM trick mode
flag,
1 bit
Additional
copy info flag,
1 bit
PES extension
flag,
1 bit
PTS DTS,
40 (33) bitsESCR,
40 (33) bits
ES rate,
24 (22) bits
DSM trick
mode,
8 bits
Additional
copy info,
8 (7) bits
PES CRC,
16 bitsPES extension
Flags, 5 bitsOptional
fields 2
PES
extension
field data
PES private
data,
128 bits
Pack header field,
8 bits
Program packet
sequence counter,
8 bits
PSTD buffer,
16 bits
PES extension field
lenght,
7 bits
PES private
data flag,
1 bit
Pack header field flag,
1 bit
Program packet
sequence counter flag,
1 bit
PSTD buffer flag,
1 bit
PES extension field
lenght flag,
1 bit
Fig. 9.5. Packetized elementary stream header
The format of the PRS header is defined by the stream ID used to identify the type of PES. The
PES packet length indicates the number of bytes in the PES packet. The scrambling mode is
represented by the scrambling control. The PES header length data indicates the number of bytes in
the optional PES header fields, as well as stuffing bytes used to satisfy the communication network
requirements.
The PES header contains time stamps to allow synchronization by the decoder. Two different
timestamps are used: presentation timestamp (PTS) and decoding timestamp (DTS). The PTS
specifies the time at which the access unit should be removed from the decoder buffer and presented.

134
The DTS represents the time at which the access unit must be decoded. The DTS is optional and is
only used if the decoding time differs from the presentation time.
The elementary stream clock reference (ESCR) indicates the intended time of arrival of the
packet at the system target decoder (STD). The rate at which the STD receives the PES is indicated
by the elementary stream rate (ESR). Error checking is provided by the PES cyclic redundancy check
(PESCRC)
The pack header field is a PS pack header. The program sequence packet counter indicates the
number of system streams. The STD buffer size is specified by the P-STD buffer (PSTDB) field.
9.3.3 MPEG-2 program stream
A PS multiplexes several PESs, which share a common time base, to form a single stream for
transmission in error free environment (BER of the order of 10-10, corresponding to 10 erroneous bits
in 1 hour for a bit rate of 30 Mb/s). The PS is intended for a storage and retrieval of programs from
digital storage media such as CD-ROM or hard disk. The PS uses relatively long variable length
packet (e.g., 2048 bytes). Program stream coding layer allows only one program of one or more
elementary streams to be packaged into a single stream, in contrast to transport stream, which allows
multiple programs. Each piece of an individual elementary stream in a PS file has timing information
created during the multiplexing process which tells the decoder their position in time relative to the
beginning of the file. That way the decoder can keep all streams synchronized during playback. The
stream organization is similar to the MPEG-1 system stream [41].
9.3.4 MPEG-2 transport stream
The TS is designed for broadcasting over communication networks [41, 74, 75]. The TS is
intended to be a multiplex of many TV programs with their associated sound and data channels,
although a single program TS is possible as well. In the case of a single program in the TS it is called
single program transport stream (SPTS). Several SPTS can be joined to form a multiple program
transport stream (MPTS). In this case additional PSI program specific information (PSI) appears in
the stream, which is needed for DVB coordination (see Figure 9.6).
Other data MPEG-2 video ES MPEG-2 audio ES
MPEG-2 packets MPEG-2 SPTS
MPEG-2 MPTS
MPEG-2 PSI
Fig. 9.6. Possible data streams in multiple program mode
Transport stream is created in such way that it would be possible to:
• Select encoded data of a single program and decode them (see Figure 9.7);
• Extract data of a single or several programs from the transport stream and create other
transport streams;
• Extract data from the transport stream and to create a program stream;
• Create a program stream, convert it to transport stream, transmit data over communication
channel and then reconstruct the program stream.

135
Audio
decoder
Video
decoder
Synchronization
block
Transport stream
demultiplexer and
decoder
Channel
decoder
Video signal
Audio signalTransport
stream
Channel
data
Fig. 9.7. MPEG-2 audio and video systems at reception side
The TS is based upon packets of constant size so that adding error correction codes and
interleaving is eased. The TS uses small fixed length packets of 188 bytes that make them more
resilient to packet loss or damage during transmission. PES packets are inserted into TS packets, as
seen in Figure 9.8 TS packets should not be confused with PES packets which can be larger and vary
in size.
TP1
188 bytes
TP3 TP4 TP5 TP6 TP7
184
bytes184
bytes
<184
bytes
PES 1 packet
(>184 bytes)
PES 2 packet
(=184 bytes)
184
bytes
<184
bytes
Data (video, audio, etc.) Adaptation field (AF)Transport packet header PES header
Fig. 9.8. Arrangement of the PESs in an MPEG-2 transport stream
The TS packet is composed of a 4-byte header followed by 184 bytes shared between the
optional variable length adaptation field (AF) and the TS packet payload which carries data from
PES. For efficiency, the normal header is relatively small, but for special purposes the header may be
extended. In this case the payload gets smaller so that the overall size of the packet is unchanged. The
payload means the data from the PES composing the TV programs, to which are added a certain
number of data allowing the decoder to find its way in the MPEG-2 transport stream. The TS packet
should carry only data coming from one PES packet. The first byte of each PES packet header is
located at the first available payload location of a transport packet and end at the end of a transport
packet. Since transport packets are generally shorter than PES packets, these have to be divided into
data blocks of 184 bytes. The last transport packet carrying the last part of a PES packet, which is
shorter than 184 bytes, will have to start with an adaptation field (AF), the length of which will be
equal to 184 bytes minus the number of bytes remaining in the PES packet.
An illustration of the TS and its header structure is shown in Figure 9.9 [74, 76].

136
Header TS payload
Sync
byte,
8 bits
Transport
error
indicator,
1 bit
Payload unit
start indicator,
1 bit
Transport
priority,
1 bit
Packet
ID,
13 bits
Transport
scrambling
control,
2 bits
Adaption
field
control,
2 bits
Continuity
counter,
4 bits
Adaptation
field
Program
clock
reference,
48 bits
Splice
countdown,
8 bits
Transport private
data lenght,
8 bits
Transport
private data,
variable length
Adaptation
field extension
lenght,
8 bits
3 flags,
3 bitsOptional field
Original
program clock
reference,
48 bits
Adaptation
field lenght,
8 bits
Discontinuity
indicator,
1 bit
Random access
indicator,
1 bit
PES priority
indicator,
1 bit
5 flags,
5 bitsOptional field Stuffing bytes,
variable length
Fig. 9.9. The structure of the transport packet and its header
The TS header includes a synchronization byte (SB) designed for detection by a demultiplexer
of the beginning of each TS packet. The content of SB is 10000111. The transport error indicator
(TEI) points to the detection of an uncorrectable bit error in this TS packet from previous stages. The
payload unit start indicator (PUSI) flag with a value of true denotes the start of a new PES or PSI,
otherwise zero only. The packet identification (PID) identifies the type and source of payload in the
TS packet via the program specific information (PSI) tables (about tables see below). It is one of the
most important elements in the TS. The PID can identify about 8000 types of packets in a 13-bit field.
A multiplexer seeking a particular elementary stream simply checks the PID of every packet and
accepts those that matches, rejecting the rest. Figure 9.10 shows how different video and audio
packets (differing in PID) are composed in MPEG-2 transport stream.
PID audio PID video PID videoPID audio PID video
Fig. 9.10. Multiplexed audio and video packets in MPEG transport stream
All audio and video packets have their unique PID, according to which they are allocated in by
the receiver’s demultiplexer. Usually there are more video packets than audio packets and any packet
in the stream can be inserted at any given moment by the multiplexer. If there is no packet in the input
of the multiplexer, it inserts empty packet with an ID 0x1FFF to preserve the bit rate.
The scrambling control flag identifies if the data is encrypted. The presence or absence of
adaptation field (AF) and payload data in the packet are indicated by the adaptation field control
(AFC) flag.
In a multiplex there may be many packets from other programs in between packets of a given
PID. To help the demultiplexer to find its way in this jungle, the packet header contains a continuity
count. The continuity counter (CC) provides the number of TS packets with the same PID, which is
used to determine the packet loss. Sequence number of payload packets. (0x00 to 0x0F)
Incremented only when a payload is present (i.e., payload value is true)
The optional adaptation field (AF) contains additional information that need not be included in
every TS packet. The adaptation field is for sending various types of information such as splice
countdown used to indicate PCR and edit points. It is also used as stuffing (when the final section of
a PES packet is placed in a TS packet payload, dummy data must be added to ensure a fixed-length
TS packet). One of the most important fields in the AF is the program clock reference (PCR). A
transport stream is a multiplex of several TV programs and these may have originated from widely

137
different locations. It is impractical to expect all the programs in a transport stream to be synchronous.
The decoder has to lock to the encoder. Therefor the transport stream has to have a mechanism to
allow this to be done independently for each program. The synchronizing mechanism is called
program clock reference. The PCR is a 42-bit field composed of 9-bit segment incremented at 27 MHz
as well as 33-bit segment incremented at 90 kHz. The PCR is used along with a voltage-controlled
oscillator as a time reference for synchronization of the encoder and decoder clock. The program map
table indicates the PID of the transport packets which carry the PCR for each program. The minimum
repetition rate of the PCR is 10 times per second. In some cases, the payload of a transport packet can
be solely composed of an adaptation field of 184 bytes, for example, for the transport of private data.
9.3.5 The MPEG-2 tables
In order the user would be able to accept a transport stream dedicated to him, firstly a PID has
to be identified and then packets, containing a specific PID field, have to be filtered. In order the user
would be able to identify which PID corresponds to a particular program signaling tables are formed
(see Figure 9.11). MPEG-2 has defined four types of tables [76], which together make up the MPEG-
2 program specific information (PSI). Each table, depending on its importance, is made up of one or
more sections. Maximum number of sections is 256, each of which has maximum 1024 bytes, except
for private sections which can be up to 4096 bytes in length.
PID audio PID video PID video
PAT-program
allocation tablePMT-program
map table
Other packets
(program guide,
subtitles etc.)
Fig. 9.11. Illustration of insertion of signaling tables
Program allocation table (PAT)
This table is always presented in the TS packet and it is carried by the packets of PID equal to
zero (PID=0×0000). Its purpose is to indicate, for each program in the stream, the link between the
program number (from 0 to 65535) and the PID of packets carrying a “map” of the program (program
map table – PMT). The PAT is always broadcast unscrambled, even if all programs of the transport
stream are scrambled.
Conditional access table (CAT)
This table must be presented as soon as at least one program in the stream has conditional
access. It is transported by the packets of PID=0×0001 and indicates the PID of packets carrying the
entitlement management messages (EMM) for one or more conditional access systems. The EMM is
one of the two pieces of information required for descrambling conditional access programs.
Program map table (PMT)
There is one PMT for each program present in the stream. It indicates, in the unscrambled mode,
the PID of the elementary streams making up the program and, optionally, other private information
relating to the program, which can be eventually scrambled. This information is the entitlement
control messages (ECM), which is the other piece of information necessary for unscrambling
programs with conditional access, the first being the EMM carried by the CAT. The PMT can be
transported by packets of arbitrary PID defined by the broadcaster and indicated in the PAT, except
0×0000 and 0×0001, which are reserved for PAT and CAT respectively.
Transport stream description table (TSDT)
This table describes the contents of the stream. It is transported by packets of PID=0×0002.

138
Private tables (PT)
These tables carry private data, which are either in free format or in a format similar to the CAT,
except for the section length, which can be as much as 4096 bytes, compared with 1024 bytes for the
other tables.
The DVB standard adds complementary tables to the MPEG-2 tables. Some of them are
mandatory and some optional. These tables of so called DVB-SI (service information) enable the
receiver to configure itself automatically and allow the user to navigate the numerous programs and
services available. This information is made up of four mandatory tables and three optional ones.
Mandatory tables of DVB-SI
These tables apply to the actual transport stream.
Network information table (NIT)
This table, as its name implies, carries information specific network made up of more than one
RF channel (and hence than one transport stream), such as frequencies or channel numbers used by
the network, which the receiver can use to figure itself, for instance. This table is carried by packets
with PID=0×0010.
Service description table (SDT)
This table lists the names and other parameters associated each service in the transport stream.
It is transported by packets with PID=0×0011.
Event information table (EIT)
This table is used to transmit information relating to events occurring or going to occur in the
current transport stream. It is transported by packets with PID=0×0012.
Time and date table (TDT)
This table is used to update the internal real-time clock of the set-top box. It is transported by
packets with PID=0×0014.
Optional tables of DVB-SI
These tables apply to the actual transport stream.
Bouquet association table (BAT)
This table (present in all transport streams making up the bouquet) is used as a tool for grouping
services that the set-top box may use to present the various services to the user (e.g., by way of the
electronic program guide – EPG). A given service or program can be part of more than one bouquet.
It is transported by packets with PID=0×0011.
Event information table (EIT)
This table is used to transmit information relative to events occurring or going to occur in the
current transport stream. It is transported by packets with PID=0×0012.
Running status table (RST)
This table is transmitted only once for a quick update of the status of one or more events at the
time that this status changes, and not repeatedly as with the other tables. It is transported by packets
with PID=0×0013.
Time offset table (TOT)
This table indicates the time offset to the GMT. It is transported by packets with PID=0×0014.

139
Stuffing tables (ST)
These tables are used, for example, to replace previously used tables which have become
invalid. They are transported by packets with PID=0×0010 to 0×0014.

140
10. SCRAMBLING and CONDITIONAL ACCESS
10.1 Introduction
Digital Video Broadcasting (DVB) is a standard defining a one-to-many unidirectional data
network for sending digital TV programs over satellite, cable, and other topologies. The standard
enables the broadcasting industry to offer hundreds of pay-TV channels to consumers in order to
recover as quickly as possible the high investments required launching DVB services. Furthermore
the standard enables the consumers easily to choose one the mostly offered billing forms:
conventional subscription, pay per view or near video on demand, if the system includes a “return
channel”. The expanded capacities make the broadcast signals more valuable and attractive to signal
thefts [78]. To protect a DVB data-network, the DVB standard integrates into its broadcasting
infrastructure an access control mechanism, commonly known as Conditional Access, or CA for
short. The DVB standard provides the transmission of access control data packets carried by the
conditional access table (CAT) and other private data packets indicated by the program map table
(PMT). The standard also defines the common scrambling algorithm (CSA). The conditional access
(CA) itself is not defined by the standard because most operators want to exploit their own system
for commercial and security reasons.
It is evident that only very general principles of scrambling system in the DVB standard are
universally available. Implementation details are accessible only to network operators and
manufacturers under nondisclosure agreement.
The DVB conditional access architecture manages end-users’ rights to access contents of a
DVB digital TV network. The architecture separates functions into subscriber management,
subscriber authorization, and data scrambling. The same broadcast network is used for content
delivery and access control. To defend against attacks, the architecture relies on secret designs,
cryptography, and temper-resistant hardware to achieve its objectives. Furthermore, system
components are carefully partitioned for damage management, where critical parts can be
inexpensively replaced when security is compromised. The architecture is adopted by many
broadcasting networks around the world and serves as a reference model for many other deployments
of digital TV broadcasting.
10.2 Functional Partitions
The DVB-CA architecture manages end-users’ access to protected contents with three
elements: data scrambling, a subscriber authorization system (SAS), and a subscriber management
system (SMS) [77]. Together, they form three layers around the protected contents (see Figure 10.1).
Subscriber Management
Subscriber Authorization
Data-Scrambling
Mpeg2 Digital TV
Fig. 10.1. Three layers around the protected contents
Data scrambling encrypts the digital-TV contents at the center. The subscriber authorization
system controls the data-scrambling element by handling the secured distribution of descrambling
keys to authorized subscribers. Knowing to which subscribers what contents are admissible, the
subscriber management system delivers access permissions to the SAS for execution.

141
The protection scope of the DVB-CA architecture ends at the point where protected contents
are legitimately descrambled. Thus, DVB-CA does not care what a legitimate subscriber does with
the descrambled content.
10.2.1 Data-Scrambling
The data-scrambling element is the encryption of TV contents. To avoid confusion, the DVB-
CA specification uses the terms scrambling and descrambling to mean the encrypting and decrypting
of TV contents, differentiating other uses of cryptography in the broader DVB infrastructure [79].
The broadcast center does the scrambling, and receivers perform the descrambling.
10.2.2 Subscriber Authorization System
The SAS element implements the access-control protocol. It enforces end-users’ access rights
by allowing only authorized subscribers to descramble the contents [77]. SAS uses cryptography
extensively, and the system is designed to be renewable inexpensively as a strategy to contain damage
from being compromised.
10.2.3 Subscriber Management System
The SMS element grants access rights. Operating from the business operation center, the SMS
maintains a database of subscribers. For each subscriber, the SMS database records subscription level,
payment standing, and a unique ID inside the subscriber’s smart card. The SMS uses the information
to decide which TV channels a subscriber is entitled to view, and the access permissions are given to
the subscriber authorization system for enforcement [77].
10.3 System Architecture
The next Figure 10.2 depicts the major components of the DVB-CA architecture and their
relations [77]
CA host
SMS
EMM
ECM
CA descriptors
Scrambler
MPEG-2
audio/video
User rigths
Channel ACL
CA client
Receiver
CA module
Descrambler
Control wordsControl words
MPEG-2
audio/video
DVB data network
Smart card
Fig. 10.2. The major components of the DVB-CA architecture
The scrambler and descrambler implement the data-scrambling element, and control words are
the cipher keys. CA-Host, CA-Client and CA-Module are the three distributed components of the
SAS element, and they use CA descriptors and CA messages (EMM and ECM) for communication.
The real implementation of the system can vary from one operator to another. The details of
these systems are not publicly known, but their principles are similar.
10.3.1 Scrambler and Descrambler
The data-scrambling cipher is called DVB Common Scrambling Algorithm (DVB-CSA). The
algorithm is a combination of 64-bit block cipher followed by a stream cipher, with a key-size of 64
bits [80] in order to make the pirate’s task more difficult. However, the details of cipher generation

142
are kept in secret and disclosed to equipment manufacturers under nondisclosure agreement. For
performance and obscurity, the algorithm is implemented in hardware.
At the broadcast center, the scrambler generates control words to scramble the contents, and it
passes the control words to the CA-Host for secured distribution to descramblers via ECM CA
messages [76]. Control words change about every ten seconds, and the scrambler synchronizes the
descrambler to key switching using a specific bit in data-packet headers [76]. As a defense strategy,
different TV channels are scrambled with different stream of control words.
The DVB standard allows the scrambling of the transport stream and of the PES. However these
cannot be used simultaneously.
It was mentioned in the paragraph 9.3.4 that the transport packet header includes a 2-bit field
called “Transport scrambling flags”. These bits indicate whether the transport packet is scrambled
and with which control word. Transport packets are scrambled after multiplexing.
Scrambling of PES packets generally takes place at the source, before multiplexing. The
presence of scrambling and control word is indicated by the 2-bit PES scrambling control flags in the
PES packet header.
10.3.2 CA Messages
CA messages are encrypted command and control communications from CA-Host to CA-
Modules. The DVB-CA architecture categorizes CA messages into Entitlement Control Messages
(ECM) and Entitlement Management Messages (EMM) [79]. ECMs carry channel-specific access-
control list and control words. EMMs deliver subscriber-specific entitlement parameters [76]. These
messages are generated from three different types of input data:
A control word, which is used to initialize the descrambling sequence;
A service key, used to scramble the control word for a group of one or more users;
A user key, used for scrambling the service key.
ECM are the function of the control word and the service key, and are transmitted
approximately every 2 s. EMM are a function of the service key, and are transmitted approximately
every 10 s. The process of ECM and EMM generating is illustrated in Figure 10.3 [76].
Encryption
User key Service key
ECM
EMM
Control
words
Decryption
Control words
Control wordsECM
Decryption
Service key
Service key
EMM
User key
(Smart card)
EMM User key
Fig. 10.3. Illustration of the ECM and EMM generation
process
Fig. 10.4. Illustration of decryption of the control words
from CM and EMM
In the receiver, the principle of decryption consists of recovering the service key from the EMM
and the user key, contained in a smart card. The service key is then used to decrypt the ECM in order
to recover the control word allowing initialization of the descrambling process. Figure 10.4 illustrates
the process for recovering control words from the ECM and EMM.
Figure 10.5 illustrates the process of finding the ECM and EMM required descrambling a
wanted program [76], for example, No 5.

143
Prog 5
PAT sections
PID N
CA system 1
CA system 2EMM-2 reference
EMM-1 reference
CAT sections
Prog 5
PMT sections
PID
PID 0 Video 5 PID N Audio 5 PID 1 Video 5 EMM-1 EMM-2 EMM-3 EMM-4 EMM-5
CA system 3
CA system 4
EMM-3 reference
EMM-4 reference
Audio
Video
ECM
PCR
Fig. 10.5. Illustration of the process of finding ECM and EMM in the transport stream
The process consists of 4 steps [76]:
Step 1. The program allocation table (PAT), rebuilt from sections in packets with PID=0×0000,
indicates the PID N of the packets carrying the program map table (PMT) sections;
Step 2. The PMT indicates, in addition to the PID of the packets carrying the video and audio
PESs and the PCR (Program Clock Reference), the PID of packets carrying the ECM;
Step 3. The conditional access table (CAT), rebuilt from sections in packets with PID=0×0001,
indicates which packets carry the EMM for one (or more) access control systems;
Step 4. From this information and the user key, contained in the smart card, the descrambling
system can calculate the control word required to descramble the next series of PES or transport
packets depending on the scrambling mode.
As a strategy of defense in depth, a secret cipher different from data scrambling is used, and the
details on the message formats are closely guarded secrets.
10.3.3 CA Descriptor
CA descriptors are data records associating a protected channel to its ECMs [79]. Since
different stream of control words are used to scramble different channels, there is no need to keep the
relations secret. Thus, the CA descriptors are sent in clear via the electronic channel guide, which is
transmitted continuously in the broadcast traffic.
10.3.4 CA-Host
The CA-Host is the control center of the access protection [77]. It is responsible for encrypting
all CA messages to CA-Modules and securely distributing CA messages' cipher keys to CA-Modules.
10.3.5 CA-Client
A CA-Client is the access-control coordinator at a receiver [77. It passes CA messages from
the CA-Host to its CA-Module. It delivers the control words from the CA-Module to the descrambler.
When the viewer selects a channel, the CA-Client uses the channel’s CA descriptor to filter the
associated ECMs and passes them to the CA-Module. If the channel is a pay-per-view, the CA-Client
also walks the viewer through GUI dialogs to confirm purchases.

144
10.3.6 CA-Module
A CA-Module (CAM) is the access-control guard at a receiver [77]. Each CA-Module has a
unique CAM-ID for identifying the subscriber. The CA-Module authenticates and decrypts EMMs to
establish a subscriber’s entitlement parameters, which are stored in the CAM’s non-volatile and
secured memory and never leave the CAM. The CA-Module also authenticates and decrypts ECMs
to receive a channel’s control words and access parameters from the CA-Host. If the access parameter
in an ECM is consistent with the entitlement parameters stored in the CA-Module, the CA-Module
returns the control word to the CA-Client for setting up the descrambler. Since it is important for CA-
Modules to be temper-resistant and easily replaced when damaged or compromised, they are often
implemented as smart cards.
10.3.7 Subscriber Management System
The SMS is the business manager determining each subscriber’s rights of channel access [77].
It uses CAM-IDs to link subscribers to the subscriber authorization system. As a subscriber’s
subscription level and payment standing change, the SMS modifies the access rights by instructing
the CA-Host to send new EMMs to the CA-Module having the subscriber’s CAM-ID [77].
10.4 Network Integration
The next Figure 10.6 shows where the components of the DVB-CA architecture are integrated
into a DVB data network [77].
To illustrate the interaction between the components in the DVB-CA architecture, the following
example of the system operation in the case of the assumed scenario is presented.
Let’s have a subscriber to whom is currently allowed to see only basic programs, without access
to premium sports channels. However the subscriber decides to watch an interesting sports program.
Tuning to the channel, the subscriber receives an on-screen message instructing him to call the
customer service center to upgrade subscription level. After the conversation about service upgrade,
the customer representative confirms the subscriber’s request to upgrade. ithin a few seconds, the
on-screen message is replaced by the desirable program show.
At that time the CA-Client receives the channel-tuning request from the graphical user interface
(GUI). From the channel number of the desirable sports program, the CA-Client looks up the
parameters from the channel-guide to set up the data receiver and packet filter for receiving the
program’s digital audio and video streams. More importantly, the CA-Client looks up the CA
descriptor and extracts parameters to set up the packet filter for receiving ECM packets associated
with the desired channel. When the ECMs arrive, the CA-Client passes them to the CA-Module and
waits for response.
Subscriber
management
CA
des
crip
tors
Channel guide
MPEG-2
audio/video 1
MPEG-2
audio/video 2
MPEG-2
audio/video N
Scr
amble
r
Mult
iple
xer
CA mesages
Tra
nsm
itte
r
CA host
Control
words
Rec
eiver
Pac
ket
fil
ter
Des
cram
ble
r
MPEG-2
audio/
video MPEG-2
decoder
GUI
CA
messages
Channel
guide
TV output
CA module
TV
Smart
card
Control
words
CA messages
CA
clie
nt

145
Fig. 10.6. The components of the DVB-CA architecture integrated in DVB data network
When the CA-Module receives an ECM, it authenticates and decrypts the ECM to extract the
control word and access parameter of the tuned channel. Comparing the access parameter to the stored
entitlement parameter, CA-Module finds that the service belongs to a subscription level higher than
that of the subscriber. Thus, the CA-Module returns a status code of “below service level” to the CA-
Client. The CA-Module continues to return the same status code for every ECM passed from the CA-
Client since the subscriber’s entitlement remains unchanged.
Receiving a response status of “below service level”, the CA-Client displays a message on the
TV screen, asking the subscriber to call the customer service center for service upgrade. The message
remains on screen for as long as the CA-Module returns the same response to all ECMs passed from
the CA-Client.
As instructed by the on-screen message, the subscriber calls the customer service center to
request service upgrade. After confirming the request and obtaining online credit approval, the
customer representative enters the new subscription level to the subscriber management system
(SMS). Upon receiving the upgrade, the SMS provides the new subscription level and the subscriber’s
CAM-ID to the CA-Host. The CA-Host encapsulates the new subscription level into an EMM, tags
it with the subscriber’s CAM-ID, signs and encrypts it, and inserts the EMM into the broadcast traffic.
Back at the receiver site, the CA-Client receives the EMM tagged with the subscriber’s CAM-
ID and passes it to the CA-Module. After authenticating and decrypting the EMM, the CA-Module
stores the new subscription level into its internal secured storage. When a subsequent ECM from the
desired sports channel comes along, the CA-Module finds that the subscriber is entitled to the channel.
Consequently, CA-Module returns the control word.
Receiving a valid control word from the CA-Module, the CA-Client sets up the descrambler,
and the digital audio and video data are descrambled, decoded, and shown on the TV set. Seeing the
wanted sports program, the subscriber ends the conversation with the customer representative.
From this point on, the CA-Client continuously feeds the channel’s ECMs to the CA-Module,
which returns new control words as they change.
10.7 Main Conditional Access Systems
Table 10.1 [76] indicates the main conditional access systems used by European digital pay TV
service providers. Most of these systems use the DVB-CSA scrambling standard specified by the
DVB. The receiver has an internal descrambler controlled by embedded conditional access software
which calculates the descrambler control words from the ECM messages and keys contained in a
subscriber smart card with valid access rights updated by the EMM.
Table 10.1 Main conditional access systems
System Origin Examples of service providers
Betacrypt Betaresearch (obsolete) Premiere World, German cable
Conax Conax AS (Norway) Scandinavian operators
CryptoWorks Philips Viacom, MTV Networks
IrDETO Nethold Multichoice
Nagravision 1 & 2 Kudelski S.A. Dish Network, Premiere
Viaccess 1 & 2 France Telecom TPS, AB-Sat, SSR/SRG, Noos
Videoguard/ICAM News Datacom (NDS) BskyB, Sky Italia

146
11. RANDOMIZATION and FRAME SYNCHRONIZATION
11.1 Randomization
Before the demodulator in a receiver can recover a bit stream from the received signal, it must
extract timing information. As a minimum, this timing information is used to identify the boundaries
between symbols. Long runs of identical symbols may often occur in digital television. Examples
include transport stream null packets and start packets used in video and system layers. In these cases
there are no changes in the value of received symbols waveforms and receiver is unable to extract
timing information. In order to prevent these runs of identical symbols, a process of symbol or bit
stream randomization is applied.
Randomization very often is referred to as a scrambling [38]. As we have seen in chapter 10
the terms scrambling and descrambling denoting the encrypting and decrypting of TV contents were
used. It is common for physical layer standards bodies to refer to physical layer encryption as
scrambling as well [81]. In this chapter the term scrambling is perceived as a coding operation applied
to the bit stream at the transmitter that randomizes the bit stream, eliminating long strings of like bits
that might impair receiver synchronization. Scrambling also eliminates most periodic bit patterns that
could produce undesirable discrete frequency components in the power spectrum. Thus in this chapter
scrambling and descrambling denotes randomization and de-randomization of bit streams,
specifically of MPEG transport streams [82]. Needless to say, the scrambled sequence must be
descrambled at the receiver so as to preserve overall bit sequence transparency.
Simple but effective scramblers and descramblers are built from tapped shift registers having
the generic form of Figure 11.1 [38].
an-1 an-2 an-K
an
1 2
Clock K-stage shift register
na
K
Fig. 11.1. Tapped shift register
Successive bits from the binary input sequence na enter the register and shift from one stage to
the next at each tick of the clock. The output na is formed by combining the bits in the register through
a set of tap gains and mod-2 adders, yielding
1 1 2 2 ...n n n k n Ka a a a . (11.1)
The tap gains themselves are binary digits, so 1k simply means a direct connection while
0k means no connection. The symbol 0 stands for modulo-2 addition, defined by the properties
1 2
1 2
1 2
0, ;
1, ;
a aa a
a a
and 1 2 3 1 2 3 1 2 3( ) ( )a a a a a a a a a (11.2)
where 1 2,a a , and 3a are arbitrary binary digits. Mod-2 addition is implemented with exclusive-OR
(XOR) digital logic gates, and obeys the rules of ordinary addition except that 1 1 0 .
Figure 11.2 shows an illustrative scrambler and descrambler, each employing a 4-stage shift
register with tap gains 1 2 0 and 3 4 1 .

147
na
1na
2na
3na
4na
na
na
Clock
a)
na
1na
2na
3na
4na
na
na
Clock
b)
Fig. 11.2. Illustrative binary scrambler and descrambler; (a) scrambler, (b) descrambler
The binary message sequence na at the input to the scrambler is mod-2 added to the register
output na to form the scrambled message na which is also fed back to the register input. Thus,
3 4n n na a a and n n na a a . (11.3)
The descrambler has essentially the reverse structure of the scrambler and reproduces the
original message sequence, since
( ) ( ) 0n n n n n n n n n na a a a a a a a a a (11.4)
Equations (11.3) and (11.4) hold for any shift-register configuration as long as the scrambler
and descrambler have identical registers.
The scrambling action does, of course, depend on the shift-register configuration. Table 11.1
shows the scrambling produced by our illustrative scrambler when the initial state of the register is
all zeroes. Note that the string of nine zeroes in na , has been eliminated in na . Nonetheless, there
may be some specific message sequence that will result in a long string of like bits in na . Of more
serious concern is error propagation at the descrambler, since one erroneous bit in na will cause
several output bit errors. Error propagation stops when the descrambler register is full of correct bits.
Table 11.1 Illustrative scrambler input, output and register cells contents
Input sequence n
a 1 0 1 1 0 0 0 0 0 0 0 0 0 1
Register contents
1na
0 1 0 1 0 1 1 1 1 0 0 0 1 0
2na
0 0 1 0 1 0 1 1 1 1 0 0 0 1
3na
0 0 0 1 0 1 0 1 1 1 1 0 0 0
4na
0 0 0 0 1 0 1 0 1 1 1 1 0 0
Register output n
a 0 0 0 1 1 1 1 1 0 0 0 1 0 0
Output sequence n
a 1 0 1 0 1 1 1 1 0 0 0 1 0 1
Next, we consider shift-register sequence generation. When a shift register has a nonzero initial
state and the output is fed back to the input, the unit acts as a periodic sequence generator. Take Figure
11.3, for example, where a 3-stage register with initial state 111 produces the 7-bit sequence 1110010
which repeats periodically thereafter. In general, the longest possible sequence period from a register
with K stages is
2 1KN (11.5)
and the corresponding output is called a maximal-length or pseudo noise (PN) sequence. Figure 11.3
is, in fact, a PN sequence generator with 3K and 7N .

148
1 1 1
Initial state Output sequence
1 1 1 0 0 1 0...
Fig. 11.3. Shift register sequence generator
The name pseudo noise comes from the correlation properties of PN sequences. It is easy
mathematically to show their autocorrelation functions are like white noise autocorrelation functions.
11.2 Frame Synchronization
A digital receiver needs to know when a signal is present. Otherwise, the input noise alone may
produce random output bits that could be mistaken for a message. Therefore, identifying the start of
a message is one aspect of frame synchronization. Another aspect is identifying subdivisions or
frames within the message. To facilitate frame synchronization, binary transmission usually includes
special N-bit sync words as shown in Figure 11.4. The initial prefix consists of several repetitions of
the sync word, which marks the beginning of transmission and allows time for bit-sync acquisition.
The prefix is followed by a different code word labeling the start of the message itself. Frames are
labeled by sync words inserted periodically in the bit stream.
Message bits
t
N-bit sync word
Prefix Message start
Fig. 11.4. Sync words for frame synchronization
The elementary frame synchronizer in Figure 11.5 is designed to detect a sync word s1s2…sK
whenever it appears in the regenerated sequence na . Output bits with the polar format 1na are
loaded into an K-stage polar shift register having polar tap gains given by
12 1i K is . (11.6)
This expression simply states that the gains equal the sync word bits in polar form and reverse
order, that is, 1 2 1Ks while 12 1K s . The tap gain outputs are summed algebraically to
form
1
K
n i n i
i
v a
. (11.7)
This voltage is compared with a threshold voltage V, and the frame sync indicator goes HIGH
when nv V . If the register word is identical to the sync word, then n i ia , so 2 1i n i ia and
nv K . If the register word differs from the sync word in just one bit, then 2nv K . Setting the
threshold voltage V slightly below 2K thus allows detection of error-free sync words and sync
words with one bit error. Sync words with two or more errors go undetected, but that should be an
unlikely event with any reasonable value of error probability. False frame indication occurs when K
or K-1 successive message bits match the sync-word bits. The probability of this event is very low
[38]
1
1/ 2 1/ 2 3 2K K K
f fP , (11.8)
assuming equally likely is ones and zeroes in the bit stream.
Further examination of equations (11.6) and (11.7) reveals that the frame synchronizer
calculates the cross-correlation between the bit stream passing through the register and the sync word,
represented by the tap gains. The correlation properties of a PN sequence therefore makes it an ideal

149
choice for the sync word. In particular, suppose the prefix consists of several periods of a PN
sequence. As the prefix passes through the frame-sync register, the values of nv will trace out the
shape of autocorrelation function of sync word with peaks nv K occurring each time the initial bit
s1 reaches the end of the register. An added advantage is the ease of PN sequence generation at the
transmitter, even with large values of K. For instance, getting 410f fP in equation (11.8) requires
K>14,8 , which can be realized with a 4-stage PN generator.

150
12. CODING
12.1 Introduction
If the data at the output of a digital communication system have too frequent errors that hinder
from normal receiving information, the errors can be reduced by the use of either of two main
techniques:
Automatic repeat request (ARQ);
Forward error correction (FEC).
In an ARQ system, when a receiver circuit detects parity errors in a block of data, it requests
that the data block be retransmitted. In an FEC system, the transmitted data are encoded so that the
receiver can detect, as well as correct, errors. These procedures are also called as channel coding
because they are used to correct errors caused by channel noise. The choice between using the ARQ
or the FEC technique depends on the particular application. ARQ is often used in computer
communication systems because it is relatively inexpensive to implement and there is usually a
duplex (two-way) channel so that the receiving end can transmit back an acknowledgment (ACK) for
correctly received data or a request for retransmission (Negative Acknowledgment – NAC) when the
data are received in error. FEC techniques are used to correct errors on simplex (one-way) channels,
where returning of an ACK/NAC indicator is not executable. FEC is preferred on systems with large
transmission delays, because the ARQ technique reduces the effective data rate significantly; the
transmitter has long idle periods while waiting for the ACK/NAC indicator, which is retarded by the
long transmission delay. Digital television uses only FEC technique.
Communication systems with FEC embrace encoding and decoding blocks; encoding block at
transmitter side, decoding block at receiver side. Coding involves adding extra (redundant) bits to the
data stream so that the decoder can reduce or correct errors at the output of the receiver. However,
these extra bits have the disadvantage of increasing the data rate (bits/s) and, consequently, increasing
the bandwidth of the encoded signal. Codes may be classified into two broad categories:
Block codes. A block code is a mapping of k input binary symbols into n output binary
symbols. Consequently, the block coder is a memoryless device. Because n k , the code
can be selected to provide redundancy, such as parity bits, which are used by the decoder
to provide some error detection and error correction. The codes are denoted by (n, k), where
the code rate R is defined by /R k n . Practical values of R range from 1/4 to 7/8, and k
ranges from 3 to several hundred [35].
Convolutional codes. A convolutional code is produced by a coder that has memory. The
convolutional coder accepts k binary symbols at its input and produces n binary symbols
at its output, where the n output symbols are affected by v k input symbols. Memory is
incorporated because 0v . The code rate is defined by /R k n . Typical values for k and
n range from 1 to 8, and the values for v range from 2 to 60. The range of R is between 1/4
and 7/8 [35]. A small value for the code rate R indicates a high degree of redundancy,
which should provide more effective error control at the expense of increasing the
bandwidth of the encoded signal.
12.2 Block Codes
Before discussing block codes, several definitions are needed. These are: Hamming weight and
Hamming distance. The Hamming weight and distance are used to determine the likelihood of errors.
The Hamming weight of a code word is the number of binary 1 bits. For example, the code
words 110101 and 111001 have a Hamming weight of 4.

151
The Hamming distance between two code words, denoted by d, is the number of positions by
which they differ. For example, the code words 110101 and 111001 have a distance of 2d .
A received code word can be checked for errors. Some of the errors can be detected and
corrected if 1d s t , where s is the number of errors that can be detected and t is the number of
errors that can be corrected ( s t ). Thus, a pattern of t or fewer errors can be both detected and
corrected if 2 1d t .
A general code word can be expressed in the form
1 2 3 1 2 3... ...k ri i i i p p p p , (12.1)
where k is the number of information bits, r is the number of parity check bits, and n is the total word
length in the (n, k) block code, where n k r . This arrangement of the information bits at the
beginning of the code word followed by the parity bits is most common. Such a block code is said to
be systematic. Other arrangements with the parity bits interleaved between the information bits are
possible and are usually considered to be equivalent codes. Hamming has given a procedure for
designing block codes that have single error correction capability [86]. A Hamming code is a block
code having a Hamming distance of 3. Because 2 1d t , 1t , and a single error can be detected
and corrected. However, only certain (n,k) codes are allowable. These allowable Hamming codes are
[86]
( , ) (2 1,2 1 )m mn k m , (12.2)
where m is an integer and 3m . Thus, some of the allowable codes are (7,4), (15,11), (31,26),
(63,57), and (127,120). The code rate R approaches to 1 as m becomes large.
Thinking about block coding is simplest when comparing it to two people having a
conversation. When talking in a noisy room or shouting across a long distance, there is more room
for errors in what the receiving person hears. If the sentence is long, the person can correct more
errors by taking the entire sentence in context, but short sentences have a higher error rate because it
is harder to decipher what the person is saying.
In addition to Hamming codes, there are many other types of block codes. One popular class
consists of the cyclic codes [83]. Cyclic codes are block codes, such that another code word can be
obtained by taking any one code word, shifting the bits to the right, and placing the dropped-off bits
on the left. These types of codes have the advantage of being easily encoded from the message source
by the use of inexpensive linear shift registers with feedback. This structure also allows these codes
to be easily decoded. Examples of cyclic and related codes are Bose-Chaudhuri-Hocquenhem (BCH),
Reed-Solomon (RS), Hamming, Maximal Length, Reed-Muller, and Golay codes [87].
12.3 Burst Error Correction Sometimes the bits errors are closely clustered; they say the errors occur in bursts. That is, in
one region of a received bit stream a large percentage of bits are in error, while in another region there
are few and perhaps no errors and the average bit error rate is small. The block codes can correct a
limited number of bit errors in each code word and are helpless manage with error bursts. Examples
of the sources of such bursts are:
In digital video discs playback there may occur for mechanical reasons, when, for example,
some small sections of the discs are simply defective;
Pulse jamming, such as results in radio transmission due to lightning, causes bursts of errors
as long as it lasts.
There are communication channels in which the level of the received signal power
fluctuates with time. In such fading channels bursts of errors are likely to occur when the
received power is low.
12.3.1 Block Interleaving
A primary technique which is effective in overcoming error bursts, is block interleaving. The
principle of block interleaving is illustrated in Figure 12.1 [37, 38].

152
11 12 1
21 22 2
1 2
11 12 1
21 22 2
1 2
bits/row
l
l
k k kl
l
l
r r rl
l
a a a
a a a
a a a
c c c
c c c
c c c
kl information
bits
k information
bits/column
r parity
bits/column
rl parity
bits
Fig. 12.1. Illustration of block interleaving and adding of parity bits
Before the data stream is applied to the channel, the data goes through a process of interleaving
and error correction coding. At the receiving end the data is decoded i.e., the data bits are evaluated
in a manner to take advantage of the error correcting and detecting features which result from the
coding and the process of interleaving is undone. As represented in Figure 12.l a group of kl data bits
is loaded into a shift register which is organized into k rows with l bits per row. The data stream is
entered into the storage element at a11. At each shift each bit moves one position to the right while
the bit in the rightmost storage element moves to the leftmost stage of the next row. Thus, for example,
as indicated by the arrow, the content of a11 moves to a21. When kl data bits have been entered, the
register is full, the first bit being in akl and the last bit in a11. At this point the data stream is diverted
to a second similar shift register and a process of coding is applied to the data held stored in the first
register. In this coding process, the information bits in a column (e.g., a11, a21,..., ak1) are viewed as
the bits of an uncoded word to which parity bits are to be added. Thus the code word (a11 a21…ak1 c11
c21…cr1) is formed, thereby generating a code word with k information bits and r parity bits. Observe
that the information bits in this code word were l bits apart in the original bits stream. When the
coding is completed, the entire content of the k l information register as well as the r l parity bits
are transmitted over the channel. Generally the bit-by-bit serial transmission is carried out row by
row, i.e., in the order
(crl…cr1…c1l…c11 akl…akl…a2l…a21 a1l…a12 a11). (12.3)
Note that the data is transmitted in exactly the same order it entered the register, however, now
parity bits are also transmitted. The received data is again stored in the same order as in the transmitter
and error correction decoding is performed. The parity bits are then discarded and the data bits shifted
out of the register. To see how interleaving affects bursts of errors, consider that the code incorporated
into a code word (a column in Figure 12.1) is adequate to correct a single error. Next suppose that in
the transmitted data stream a burst of noise occurs lasting for l consecutive coded bits. Then because
of the organization displayed in Figure 12.l it is clear that only one error will appear in each column
and this single error will be corrected. If there are 1l consecutive errors then one column will have
two errors and correction will not be assured. In general, if the code is able to correct t errors then the
process of interleaving will permit the correction of a burst of B bits with
B t l . (12.4)
12.3.2 Convolutional Interleaving
An alternative interleaving scheme, convolutional interleaving, is shown in Figure 12.2
[37, 38].

153
Channel with
modulator and
demodulator
1
2
3
4
l
s storage elements
2s
3s
(l-1)s
Line number
d(k)
Convolutional interleaving scheme at
transmitter
Convolutional deinterleaving scheme at
receiver
1
2
3
4
l
(l-1)s Line number
(l-2)s
(l-3)s
(l-4)s
d(k)
Fig. 12.2. Convolutional interleaving – deinterleaving scheme
The four switches operate in step and move from line-to-line at the bit rate of the input bit
stream ( )d k . Thus, each switch makes contact with line 1 at the same time, and then moves to line 2
together, etc., returning to line 1 after line l. The cascade of storage elements in the lines are shift
registers. Starting with line 1, on the transmitter side, which has no storage elements, the number of
elements increases by s as we progress from line to line. The last line l has ( 1)l s storage elements.
The total number of storage elements in each line (transmitter plus receiver side) is, in every case, the
same. Hence, in each line there are a total of ( 1)l s storage elements. To describe the timing of
operations in the interleaving system, let us consider a single line il on the transmitter side. Suppose
that during the particular bit interval of bit ( )d k there is switch contact, at input and output sides of
line il . At the end of the bit interval, a clock signal causes the shift register of line il (and line il
only), to enter into the leftmost storage element the bit on the input side of the line and to start moving
the contents of each of its storage elements one bit to the right. That process having started, a
synchronous clock advances the switches to the next line 1il . When the shift register response is
completed, there will be a new bit at the output end of the line il . However, because of the propagation
delay through the storage elements, the switch at the output end of the line will have already lost
contact with line il , before the new bit has appeared at the line output. In summary, during the interval
of input ( )d k , during which the switches were connected to line il , there is one-bit shift of the shift
register on line il which accepts bit ( )d k into the register. However, the fact that such a shift took
place is not noticed on the output switch until the next time the switch makes contact with line il . We
observe also that while the clock that drives the switches has a clock rate bf , which is the bit rate, the
clocks that drive the shift registers have a rate /bf l . The shift registers are not driven in unison, but
rather in sequence, each register being activated as the switches are about to break contact with its
line. Now let us consider that, initially, all the shift registers in the transmitter and the receiver are
short circuited. If bit ( )d k occurs when all the switches are on line then the corresponding received
bit ( )d k will appear immediately. The next input bit ( 1)d k will be the next received bit except that
it will be transmitted over line 1il and so on. In short, the received sequence ( )d k will be the same
as the transmitted sequence. With the shift registers in place in the transmitter and receiver, each of
the l lines will have the same delay ( 1)l s and therefore the output sequence will still be identical
to the input sequence. Of course, however, ( )d k will be delayed with respect to ( )d k by the amount
( 1)l s .
The sequence in which the bits will be transmitted over the channel is different. This sequence
will be interleaved. Suppose that two successive bits in the input bit stream are ( )d k and ( 1)d k .
Then it can be verified that if in the interleaved stream we continue to refer to the first bit as ( )d k ,

154
the bit which was originally ( 1)d k will instead be ( 1 )d k ls . Thus if 5l and 5s , there will
be 15ls bits interposed between two bits that were initially adjacent to one another.
In comparison with a block interleaving, the convolutional interleaving has the following
advantages:
For the same interleaving distance less memory is required;
The interleaving structure can be changed easily and conveniently by changing the number
of lines l and, or, the incremental number of elements per line s.
12.3.3 Reed–Solomon (RS) Code
The block codes we have shortly described above are organized on the basis of individual bits.
Thus typically a code word has k individual information bits, r individual parity bits and a total of
n k r individual bits in a code word. The Reed–Solomon (RS) block code is organized on the
basis of groups of bits. Such groups of bits are referred to as symbols. Thus suppose we store
sequences of m individual bits which appear serially in a bit stream and thereafter operate with the
m-bit sequence rather than the individual bits. Then we shall be dealing with m-bit symbols. Since
we deal only with symbols we must consider that if an error occurs even in a single bit of a symbol,
the entire symbol is in error. The RS code has the following characteristics: The RS code has k
information symbols (rather than bits), r parity symbols and a total code word length of n k r
symbols. It has the further characteristic that the number of symbols in the code word is arranged to
be
2 1mn . (12.5)
The RS code is able to correct errors in t symbols where
/ 2t r . (12.6)
As an example, assume that 8m , then 82 1 255n symbols in a code word. Suppose
further that we require that 16t , then 2 32r t and 255 32 223k n r information
symbols/code word. The code rate is
223 7
255 8c
kR
n . (12.7)
The total number of bits in the code word is 255 8 2040 bits/code word.
Since the RS code of our example can correct sixteen symbols it can correct a burst of
16 8 128 consecutive bit errors. If we use the RS code with the interleaving as described above,
then using equation (12.4) the number of correctable symbols is l t and the number of correctable bits
is
B mlt (12.8)
with 8m , 16t and 10l , 1280B bits.
The organization of an RS block code with 8m , 223k , 32r utilizing interleaving to a
depth of 4l is shown in Figure 12.3 [37]. There are 223×8×4=7136 information bits and
32×8×4=1024 parity bits.
It is interesting to note that while the (255,223) RS code can correct 128 consecutive bit errors
it must then have an error-free region of 255–16=239 symbols (1912 bits). Further, if the errors are
random, and there is, at most, one error per symbol, then the RS code can correct only sixteen bit
errors in 2040 bits. Clearly the RS code is not an efficient code for correcting random errors.

155
11 12 13 14
21 22 23 24
223,1 223,2 223,3 223,4
11 12 13 14
21 22 23 24
32,1 32,2 32,3 32,4
4 symbols/rowl
a a a a
a a a a
a a a a
c c c c
c c c c
c c c c
k=223
information
symbols/ column
r=32 parity
symbols/column
Each entry
represents
an 8-bit
symbol
Fig. 12.3. The organization of an RS code with m=8, k=223 and r=32
12.4 Convolutional Coding
Convolutional codes have a structure that effectively extends over the entire transmitted bit
stream, rather than being limited to code word blocks. The convolutional structure is especially well
suited to space and satellite communication systems that require simple encoders and achieve high
performance by sophisticated decoding methods.
Convolutional codes are used extensively in numerous applications in order to achieve reliable
data transfer, including digital video, radio, mobile and satellite communication. These codes are
often implemented in concatenation with a hard-decision code, particularly Reed-Solomon.
Convolutional codes, encoding and decoding techniques are more widely or barely described
in many published sources. For our discussion we have used [35–38, 85].
A convolutional code is generated by combining the outputs of an M-stage shift register through
the employment of V XOR logic summers. Such a coder is illustrated in Figure 12.4 for the case M=3
and V=2. Here M1 through M3 are 1-bit storage (memory) devices.
Convolutional codes are commonly specified by three parameters; (V, L, M), where
V is number of output bits;
L is number of input bits;
M is number of memory registers.
The quantity L/V called the code rate is a measure of the efficiency of the code. Commonly L
and V parameters range from 1 to 8, M from 2 to 10 and the code rate from 1/8 to 7/8 except for deep
space applications where code rates as low as 1/100 or even longer have been employed.
Often the manufacturers of convolutional code chips specify the code by parameters (V, L, K).
The quantity K is called the constraint length of the code and is defined by
K=L(M-1). (12.9)
The constraint length K represents the number of bits in the encoder memory that affect the
generation of the V output bits.
12.4.1 Code parameters and the structure of encoder
The convolutional encoder structure is easy to draw from code parameters. First draw M boxes
representing the M memory registers. Then draw V modulo-2 adders to represent the V output bits.
Now connect the memory registers to the adders using the generator polynomial as shown in the
Figure 12.4. (Elementary explanation of generator polynomial follows below. The comprehensive
studies of code words representation as polynomials and generator polynomials of the codes are
presented in many books, for example, in [83, 84]).

156
Input
bits si
3-stages shift register
Output
Encoded bits co
s1 s0
v1
v2
s-1
M3M2M1
Fig. 12.4. Convolutional encoder (2, 1, 3) with V=2, L=1, M=3
This encoder generates a rate 1/2 code. Each input bit is coded into 2 output bits. The constraint
length of the code is 2 (K=2). The 2 output bits are produced by the 2 modulo-2 adders by adding up
certain bits in the memory registers. The selection of which bits are to be added to produce the output
bit is called the generator polynomial G for that output bit. For example, the first output bit has a
generator polynomial of (1,1,1). The output bit 2 has a generator polynomial of (1,0,1). The output
bits are just the modulo-2 sum of these bits.
1 1 0 1v s s s ,
2 1 1v s s .
The polynomials give the code its unique error protection quality. One (2,1,3) code can have
completely different properties from another one depending on the polynomials chosen.
There are many choices for polynomials for any M order code. They do not all result in output
sequences that have good error protection properties. The complete list of these polynomials is
presented in [84]. Good polynomials are found from this list usually by computer simulation. A list
of good polynomials for rate 1/2 codes is given below in the Table 12.1 [85].
Table 12.1 Generator Polynomials for good rate 1/2 codes [85]
Constraint length 3 4 5 6 7 8 9 10
G1 110 1101 11010 110101 110101 110111 110111 110111001
G2 111 1110 11101 111011 110101 1110011 111001101 1110011001
12.4.2 Encoder states
What encoders output depends on what is their state of shift registers stages. Encoder states are
just a sequence of bits. Sophisticated encoders have long constraint lengths and simple ones have
short indicating the number of states they can be in.
The (2,1,3) encoder in Figure 12.4 has a constraint length of 2. The shaded stages hold these
state determining bits. The unshaded stage holds the incoming bit. This means that 2 bits or 4 different
combinations of these bits can be present in these memory stages. These 4 different combinations
determine what output we will get for v1 and v2, the coded sequence. The number of combinations of
bits in the shaded stages are called the states of the code and are defined by
Number of states=2K, (12.10)
where K is the constraint length of the code. The output bits depend on the initial condition of register
stages which changes at each time tick.
The code (2,1,3) shown above has 2 output bits for every 1 input bit. It is a rate 1/2 code. Its
constraint length is 2. The total number of states is equal to 4. The four states of this (2,1,3) code are:
00, 01, 10, 11.
12.4.3 Punctured codes
For the special case of L=1, the codes of rates 1/2, 1/3, 1/4, 1/5, 1/7 are sometimes called mother
codes. We can combine these single bit input codes to produce punctured codes which give us code

157
rates other than 1/V. By using two rate 1/2 codes together as shown in Figure 12.5, and then just not
transmitting one of the output bits we can convert this rate 1/2 implementation into a 2/3 rate code. 2
bits come and 3 go out. This concept is called puncturing. On the receive side, dummy bits that do
not affect the decoding metric are inserted in the appropriate places before decoding.
Input
bits si s1 s0
v1
v2
s-1
M3M2M1
Input
bits si s1 s0
v1
v2
s-1
M3M2M1
Fig. 12.5. Punctured (3, 2, 3) code encoder composed from two (2, 1, 3) encoders
This technique allows us to produce codes of many different rates using just the same simple
hardware. Although we can also directly construct a code of rate 2/3 as we shall see later, the
advantage of a punctured code is that the rates can be changed dynamically (through software)
depending on the channel condition such as rain, etc. A fixed implementation, although easier, does
not allow this flexibility.
12.4.4 Structure of an encoder for L>1
Alternately it is possible to create codes where L is more than 1 bit. The procedure for drawing
the structure of a (V, L, M) encoder where L is greater than 1 is as follows. First draw L sets of M
boxes. Then draw V adders. Now connect V adders to the register stages using the coefficients of the
Vth degree polynomial. This gives a structure like the one in Figure 12.6 for encoder (4,3,3). This
(4,3,3) convolutional encoder has 9 memory registers, 3 input bits and 4 output bits. The constraint
length is 3×2=6. The code has 64 states. The shaded registers contain old bits representing the current
state and also the constraint length.
s1s2 s-2s-1s0 s-5s-4s-3s3
v1
v2 v3 v4 Fig. 12.6. Block diagram of an encoder for L=3
12.4.5 Coding of an incoming sequence
Let‘s encode a two bit sequence of 10 with the (2,1,3) encoder and see how the process works.
First we will pass a single bit 1 through this encoder as shown in Figure 12.7.
1
1
001
a)
1
0
010
b)
1
1
100
c)

158
Fig. 12.7. Illustration of encoding of two bit sequence; (a) – encoder’s state at time t=0, (b) - encoder’s state at time
t=1, (c) - encoder’s state at time t=2
At time t=0, we see that the initial state of the encoder is all zeroes, i.e. 00, (the bits in the
right most K register stage positions). The input bit 1 causes two bits 11 to be output.
At t=1, the input bit 1 moves forward one stage. The input stage is now empty and is filled
with a flush bit of 0. The encoder is now in state 10. The output bits are now 10 by the
same math.
At t=2, the input bit 1 moves forward again. Now the encoder state is 01 and another flush
bit is moved into the input register stage. The output bits are now 11 again.
At t=3, the input bit 1 has passed completely thorough the encoder and the encoder has
been flushed to an all zero state, ready for the next sequence.
Note that a single bit has produced a 6-bit output although nominally the code rate is 1/2. This
shows that for small sequences the overhead is much higher than the nominal rate, which only applies
to long sequences.
If we did the same thing with a 0 bit, we would get a 6 bit all zero sequence. What we just
produced is called the impulse response of this encoder. The 1 bit has an impulse response of 11 10
11. The 0-bit similarly has an impulse response of 00 00 00.
Convolving the input sequence with the code polynomials produced these two output
sequences, which is why these codes are called convolutional codes. From the principle of linear
superposition, we can now produce a coded sequence from the above two impulse responses as
follows.
Let‘s say that we have a input sequence of 10110 and we want to know what the coded sequence
would be. We can calculate the output by just adding the shifted versions of the individual impulse
responses. This is presented in table 12.2.
Table 12.2 Producing a coded sequence
Input bit Impulse response
1 11 10 11
0 00 00 00
1 11 10 11
1 11 10 11
0 00 00 00
Add modulo-2 to obtain response
1 0 1 1 0 11 10 00 01 01 11 00
So, when the input sequence is 10110, the coded sequence is 11 10 00 01 01 11 00.
12.4.6 Encoder design
It is shown in the previous section what happens in an encoder. The encoding hardware is much
simpler because the encoder does no mathematical operations. The encoder for convolutional code
uses a look-up table to do the encoding. The look-up table consists of four items:
Input bit;
The state of the encoder, which is one of the 4 possible states for the example (2,1,3) code;
The output bits. For the code (2,1,3), since 2 bits are output, the choices are 00, 01, 10, 11;
The output state which will be the input state for the next bit.
Analyzing operation of encoder (2,1,3) it is possible to create the following look-up table 12.3.
Table 12.3 Look-up table for the encoder (2,1,3)
Input bit Input state Output bits Output state
s1 s0 s-1 v1 v2 s0 s-1

159
0 0 0 0 0 0 0
1 0 0 1 1 1 0
0 0 1 1 1 0 0
1 0 1 0 0 1 0
0 1 0 0 1 0 1
1 1 0 0 1 1 1
0 1 1 1 0 1 1
1 1 1 1 1 0 1
Three different but related graphical representations have been devised for the study of
convolutional encoding. These are:
State diagram;
Tree diagram;
Trellis diagram.
12.4.7 State diagram
A state diagram for the (2,1,3) code is shown in Figure 12.8. Each circle represents a state. At
any one time, the encoder resides in one of these states. The lines to and from it show state transitions
that are possible as bits arrive. Only two events can happen at each time, arrival of a 1 bit or arrival
of a 0 bit. Each of these two events allows the encoder to jump into a different state. The state diagram
does not have time as a dimension and hence it tends to be not intuitive.
0110
0011
11
011000
0001
10 11
Fig. 12.8. A state diagram for the (2,1,3) code
Comparing the above state diagram to the encoder lookup table one can see the state diagram
contains the same information that is in the table lookup but it is a graphic representation. The solid
lines indicate the arrival of a 0 and the dashed lines indicate the arrival of a 1. The output bits for each
case are shown on the line and the arrow indicates the state transition.
Some encoder states allow outputs of 11 and 00 and some allow 01 and 10. No state allows all
four options.
Let‘s encode the sequence 10110 using the state diagram:
Let‘s start at state 00. The arrival of a 1 bit outputs 11 and puts us in state 10;
The arrival of the next 0 bit outputs 10 and put us in state 01;
The arrival of the next 1 bit outputs 00 and puts us in state 10;
The arrival of the next 1 bit outputs 01 and puts us in state 11;
The inputting last bit 0 takes us to state 01 and outputs 01. So now we have 11 10 00 01
01. But this is not the end. We have to push out of the last register stage the last informative
bit 0 and to take the encoder back to all zero state;
Pushing the last bit 0 to the last register stage we jump from state 01 to state 00 outputting
11;
Finally we return once more to state 00 outputting 00.
The final answer is 11 10 00 01 01 11 00.

160
12.4.8 Tree diagram
Figure 12.9 shows the tree diagram for the code (2,1,3). The tree diagram attempts to show the
passage of time as we go deeper into the tree branches. It is somewhat better than a state diagram but
still not the preferred approach for representing convolutional codes. Here instead of jumping from
one state to another, we go down branches of the tree depending on whether a 1 or 0 is received. If a
0 is received, we go up and if a 1 is received, then we go downwards.
The first branch in Figure 12.9 indicates the arrival of a 0 or a 1 bit. The starting state is assumed
to be 00. The bits above the horizontal lines are the output bits and the bits inside the parenthesis
below the horizontal lines are the output states.
Let‘s code the sequence 10110 as before. At branch 1, we go down. The output is 11 and we
are now in state 10. Now we get a 0 bit, so we go up. The output bits are 10 and the state is now 01.
The next incoming bit is 1. We go downwards and get an output of 00 and now the output state is 10.
The next incoming bit is 1 so we go downwards again and get output bits 01. From this point, in
response to a 0 bit input, we get an output of 01 and an output state of 01. What if the sequence were
longer, then what? We have run out of tree branches. The tree diagram now repeats. In fact we need
to flush the encoder so our sequence is actually 10110 00, with the last 2 bits being the flush bits. We
now go upwards for two branches. Now we have the output to the complete sequence and it is 11 10
00 01 01 11 00. This is also the same answer as the one we got from the state diagram.
00
11
00
11
00
11
10
01
10
01
11
00
01
10
10
11
11
00
00
11
10
01
01
10
11
00
01
10
11
00
00
11
00
11
10
01
10
01
11
00
01
10
01
10
11
00
00
11
10
01
01
10
11
00
01
10
00
(00)
01
10
01
11
(00)
00
(10)
(00)
(00)
(00)(00)
(01)
(11)
(10)
(10)
(10)
(11)
(01)
(00)
(10)
(11)
(01)
(10)
(00)
(11)
(01)
(10)
(00)
(01)
(11)
(01)
(11)
(11)
(10)
(11)
(01)
(11)
(01)
(00)
(10)
(01)
(00)
(10)
0
1
(11)
(01)
(00)
(10)
(11)
(01)
(00)
(10)
(11)
(01)
(00)
(10)
(11)
(01)
(00)
(10)
(11)
(01)
(00)
(10)
(11)
(01)
(00)
(10)
11
(00)
00
(00)
Fig. 12.9. Tree diagram of (2,1,3) code

161
12.4.9 Trellis diagram
Trellis diagrams are messy but generally preferred over both the tree and the state diagrams
because they represent linear time sequencing of events. The x-axis is discrete time and all possible
states are shown on the y-axis. We move horizontally through the trellis with the passage of time.
Each transition means new bits have arrived.
The trellis diagram is drawn by lining up all the possible states (2K) in the vertical axis (K is the
constraint length). Then we connect each state to the next state by the allowable code words for that
state. There are only two choices possible at each state. These are determined by the arrival of either
a 0 or a 1 bit. When the arriving bit is 1, the following line is dashed, and when the arriving bit is 0,
the following line is solid. The bits on the lines are the output bits. The arrows going upwards
represent a 0 bit and going downwards represent a 1 bit. The trellis diagram is unique to each code,
same as both the state and tree diagrams are. We can draw the trellis for as many periods as we want.
Each period repeats the possible transitions.
We always begin at state 00. Starting from here, the trellis expands and in K bits becomes fully
populated such that all transitions are possible. The transitions then repeat from this point on. The
trellis diagram for (2,1,3) code is presented in Figure 12.10.
00
01
10
11
00 00 00 00 00 00
11 1111 11 11 11
1010 10 10 10
01
01 01 01 01
11 11 11 11
00 00 00 00
10 10 10 10
01 01 01 01
Repeats Repeats Repeats Repeats
Discrete time
Sta
tes
00
11
10
00
01
10
01
11
Repeats
Start point
Incomming
bits 01 10 00 01 01 11 00
Fig. 12.10. Trellis diagram for (2,1,3) code
Encoding begins at the start point, representing encoder‘s state 00 and the beginning moment
of the discrete time. Coding is easy. We simply go up for a 0 bit and down for a 1 bit. The path taken
by the bits of the example sequence (10110 00) is shown by the red and blue lines. The red lines
indicate the path corresponding informative bits 10110 and the blue ones the flash bits 00. We see
that the trellis diagram gives exactly the same output sequence 11 10 00 01 01 11 00 as the other
above methods, namely the impulse response, state and the tree diagrams.
12.4.10 The basic decoding idea
There are several different approaches to decoding of convolutional codes. These are grouped
in two basic categories:
Sequential Decoding - Fano algorithm;
Maximum likelihood decoding - Viterbi algorithm.
Both of these methods represent two different approaches to the same basic decoding idea.
Assume that 3 bits were sent via a rate 1/2 code. We receive 6 informative bits and two flush
bits. These six informative bits may or may not have errors. We know from the encoding process that
these bits map uniquely. So a 3 bit sequence will have a unique 6 bit output. But due to errors, we can
receive any of all possible combinations of the 6 bits. This is presented in table 12.4.
The permutation of 3 input bits results in eight possible input sequences. Each of these has a
unique mapping to a six bit output sequence by the code. These form the set of permissible sequences
and the decoder’s task is to determine which one was sent.

162
Table 12.4 Bit agreement as a metric for decision between the received sequence and
the 8 possible valid code sequences
Input bits Valid code sequence Received sequence Bit agreement
000 000000 111010 2
001 000011 111010 1
010 001110 111010 3
011 001101 111010 3
100 111011 111010 5
101 111000 111010 5
110 110101 111010 2
111 110110 111010 4
Let’s say we received 111100. It is not one of the 8 possible sequences above. How do we
decode it? We can do two things:
We can compare this received sequence to all permissible sequences and pick the one
with the smallest Hamming distance(or bit disagreement);
We can do a correlation and pick the sequences with the best correlation.
The first procedure is basically what is called hard decision decoding and the second the soft
decision decoding. The bit agreements show that we still get an ambiguous answer and do not know
what was sent. As the number of bits increase, the number of calculations required to do decoding
significantly manner increases such that it is no longer practical to do decoding this way. We need to
find a more efficient method that does not examine all options and has a way of resolving ambiguity
such as here where we have two possible answers. (Shown in bold in Table 4)
If a message of length n bits is received, then the possible number of code words is 2n. How can
we decode the sequence without checking each and every one of these 2n code words? This is the
basic decoding idea.
12.4.11 Sequential decoding
Sequential decoding was one of the first methods proposed for decoding a convolutional coded
bit stream.
Sequential decoding allows both forwards and backwards movement through the trellis. The
decoder keeps track of its decisions, each time it makes an ambiguous decision, and counts it. If the
count increases faster than some threshold value, decoder gives up that path, and retraces the path
back to the last fork, where the tally was below the threshold.
Let’s do an example. The code is (2,1,3) for which we did the encoder diagrams in the previous
section. Assume that bit sequence 10110 00 was sent. (Remember the last 2 bits are the result of the
flush bits. Their output is called tail bits.)
If no errors occurred, we would receive 11 10 00 01 01 11 00. But let’s say we received instead
01 10 00 01 01 11 00. One error has occurred. The first bit has been received as 0 instead 1.
Decoding process is illustrated in Figure 12.11.

163
00
01
10
11
00 00 00
11 1111
10
01
Discrete time
Sta
tes
0 1
3
4
5
2 3
00
4
11
9
10
00
01
01
Incomming
bits 01 10 00 01
11
00
!
!
5 6 7
1
2 6
8
7
Fig. 12.11. Sequential decoding path search
1. Decision point 1. The decoder looks at the first two bits 01. Right away it sees that an error
has occurred because the starting two bits can only be 00 or 11. But which of the two bits
was received in error, the first or the second? The decoder randomly selects 00 as the starting
choice, and decodes the input bit as a 0. It puts a count of 1 into its error counter. It is now
at point 2.
2. Decision point 2. The decoder now looks at the next set of bits, which are 10. However the
code word choices are 11, 00. From here, it randomly makes the decision that a 1 was sent
which corresponds with the code word 11. This is seen as an error and the error count is
increased to 2. Since error count is less than the threshold value of 3 (which we have set
based on channel statistics) the decoder proceeds ahead. This puts it at point 3.
3. At decision point 3, the received bits are 00, but the code word choices, leading to points 4
or 5, are 10, 01. The decoder recognizes another error, and the error tally increases to 3. That
tells the decoder to turn back.
4. The decoder goes back to point 2 where the error tally was 1 (less than 3) and takes the other
choice to point 6. It again encounters an error condition. The received bits are 10 but the
code word of this branch is 00. The tally has again increased to 2.
5. At decision point 6, the received bits are 00, and the code word choices are 00, 11. From
here, the decoder makes the decision that a 0 was sent which corresponds exactly with one
of the code words. This puts it at point 7.
6. At this point the received bits are 01, but the proposed code words are 00 and 11. Either
selection leads to the third error. The decoder has to turn back to the beginning point 1.
7. Now all choices encountered (red lines) meet perfectly with the code word choices and the
decoder successfully decodes the message as 1011000.
There exist some small modifications of the above described decoding procedure. We will
examine two of them. The first one concerns the principle of ordinary bit decoding.
Consider the first message bit. This first message bit has an effect only on the first M∙V bits in
the code word. Thus with M=3 and V=2, as for the (2, 1, 3) code, the first bit has an effect only on
the first 3 groups of 2 bits. Hence to deduce this first bit, there is no point in examining the code word
beyond its first 6 bits. On the other hand, we would not be taking full advantage of the redundancy of
the code if we undertook to decide about the first message bit on the basis of anything less than an
examination of the first 6 bits of the code. Generally speaking to decode an ordinary bit it is
recommended to examine M∙V corresponding bits in the code word or, what is equivalent, to pass M
points (nodes) in the trellis diagram, if only the total number of errors does not exceed the error
threshold value.
Suppose that in the transmission of any V bits errors have found their way into more bits than
the error threshold value permits. Then, at the node from which this occurs, the decoder will make a
mistake. In such a case, the entire continuation of the path taken by the encoder must be in error.
Consider, then, that the decoder keeps a record, as it progresses, of the total number of discrepancies

164
between the received code bits and the corresponding bits encountered along its path. Then, after
having taken a wrong turn at some node, the likelihood is very great that this total number of
discrepancies will grow much more rapidly than would be the case if the decoder were following the
correct path. The decoder may be programmed to respond to such a situation by retracing its path to
the node at which an apparent error has been made and then taking the alternate way out of that node.
In this way the decoder will eventually find a path through M nodes. When such a path is found, the
decoder decides about the first message bit on the basis of the direction of divergence of this path
from the first node. Similarly, as before, the second message is determined on the basis of a path
searched out by the decoder, again M nodes long, but starting at the second starting node and on the
basis of the received code bit sequence with the first V bits discarded.
The second modification concerns the total number of bit differences between the decoder path
and the corresponding received bit sequence. We consider now how the decoder may judge that it has
made an error and taken a wrong turn. Let the probability be p that a received code bit is in error, and
let the encoder already have traced out a path through l nodes. We assume l<M, so that the decoder
has not yet made a decision about the message bit in question. Since every node is associated with V
bits, then, on the average over a long path of many nodes, we would expect the total number of bit
differences between the decoder path and the corresponding received bit sequence to be d(l)=plV even
when the correct path is being followed. In Figure 12.12 we have plotted d(l) in a coordinate system
in which the abscissa is l, the number of nodes traversed, and the ordinate is the total bit error that
has accumulated.
lM
Total bit erors
Discard level
Incorrect path
Bit errors on
correct path
d(l)=plV
Fig. 12.12. Setting the threshold in sequential decoding
We would expect that, if the encoder were following the correct path, the total bit errors
accumulated would oscillate about d(l). On the other hand, shortly after a wrong decoder decision has
been made, we expect the accumulated bit error to diverge sharply as indicated. A discard level has
also been indicated in Figure 12.12. When the plot of accumulated errors crosses the discard level,
the decoder judges that a decoding error has been made. The decoder then returns to the nearest
overpassed node, chooses alternative way and starts moving forward again until, possibly, it is again
reversed because the discard level is crossed. In this way, after some trial and error, an entire M-node
section of the trellis is navigated. And at this point a decision is made about the message bit associated
with this M-node section of the trellis. In Figure 12.12 the discard level line does not start at the origin
in order to allow for the possibility that the initial bits of the received code sequence may be
accompanied by a burst of noise. The great advantage of sequential decoding of a convolutional code
is that such decoding makes it unnecessary, generally, to explore every one of the 2M paths in the
code trellis section. Thus, suppose it should happen that the decoder takes the correct turn at each
node. Then, in this case, the decoder will be able to make a decision about the message bit in question
on the basis of a single path. Let us assume that at some node the decoder makes a mistake and must
return to this node to take an alternative way. Then even the information that an error has been made
is useful because thereafter the decoder may exclude from its searching’s all paths which diverge in
the original direction from this node. The end result is that sequential decoding may generally be
accomplished with very much less computation than the direct decoding discussed earlier.

165
The memory requirements of sequential decoding are manageable and so this method is used
with long constraint length codes where the signal-to-noise ratio is low.
12.4.12 Maximum likelihood and Viterbi decoding
Viterbi decoding is the best known implementation of the maximum likelihood decoding. Here
we narrow the options systematically at each time tick. The principal used to reduce the choices is
this:
The errors occur infrequently. The probability of error is small.
The probability of two errors in a row is much smaller than a single error that is the errors
are distributed randomly.
The Viterbi decoder examines an entire received sequence of a given length. The decoder
computes a metric for each path and makes a decision based on this metric. All paths are followed
until two paths converge on one node. Then the path with the higher metric is kept and the one with
lower metric is discarded. The paths selected are called the survivors.
For an N bit sequence, total numbers of possible received sequences are 2N. Of these only 2KL
are valid. The Viterbi algorithm applies the maximum likelihood principles to limit the comparison
to 2 to the power of KL surviving paths instead of checking all paths.
The most common metric used is the Hamming distance metric. This is just the dot product
between the received code word and the allowable code word. Each branch has a Hamming metric
depending on what was received and the valid code words at that state. This is illustrated in table 12.5.
Other metrics are also used and we will talk about these later.
Table 12.5 Each branch has a Hamming metric depending on what was received and
the valid code words at that state
Received bits Valid code word 1 Valid code word 2 Hamming metric 1 Hamming metric 2
00 00 11 2 0
01 10 01 0 2
10 00 11 1 1
These metrics are cumulative so that the path with the largest total metric is the final winner.
But all of this does not make much sense until you see the algorithm in operation.
Let’s decode the received sequence 01 10 00 01 01 11 00 using Viterbi decoding.
1. At t=0 (step 1), we have received bit 01 (see Figure 12.13). The decoder always starts at state
00. From this point it has two paths available, but neither matches the incoming bits. The
decoder computes the branch metric for both of these and will continue simultaneously along
both of these branches in contrast to the sequential decoding where a choice is made at every
decision point. The metric for both branches is equal to 1, which means that one of the two
bits was matched with the incoming bits.
00
01
10
11
00
11
Discrete time
Sta
tes
0 1 2 3 4
Incomming
bits 01 10 00 01
5 6 7
01 11 00
Path
metric
1
1
Fig. 12.13. Viterbi decoding; Step 1

166
2. At t=1 (step 2), the decoder fans out from these two possible states to four states (see
Figure 12.14). The branch metrics for these branches are computed by looking at the
agreement with the code word and the incoming bits which are 10. The new metric is shown
on the right of the trellis.
00
01
10
11
00
11
Discrete time
Sta
tes
0 1 2 3 4
Incomming
bits 01 10 00 01
5 6 7
01 11 00
Path
metric
2
2
00
11
10
01
3
1
Fig. 12.14. Viterbi decoding; Step 2
At t=2 (step 3), the four states have fanned out to eight to show all possible paths (see
Figure 12.15). The path metrics calculated for bits 00 and added to previous metrics from t=1. The
trellis is fully populated. Each node has at least two paths coming into it. The paths now begin to
converge on the nodes. Two metrics are given for each of the paths coming into a node. According
to the maximum likelihood principle, at each node we discard the path with the lower metric because
it is least likely. They are shown in blue. This discarding of paths at each node helps to reduce the
number of paths that have to be examined and gives the Viterbi method its strength. The metrics are
as shown in the Figure 12.15 on the right of the trellis.
00
01
10
11
00
11
Discrete time
Sta
tes
0 1 2 3 4
Incomming
bits 01 10 00 01
5 6 7
01 11 00
Path
metric
4 3
2 5
00
11
10
01
3 2
3 2
00
11
00
10
01
11
10
01
Fig. 12.15. Viterbi decoding; Step 3
At t=3 (step 4), the received bits are 01 (see Figure 12.16). The paths progress forward and now
at each node we have two paths converging again. Again the metrics are computed for all paths. We
discard all smaller metrics, shown in blue, but keep both if they are equal. The metrics for all paths
are given on the right.
00
01
10
11
00
11
Discrete time
Sta
tes
0 1 2 3 4
Incomming
bits 01 10 00 01
5 6 7
01 11 00
Path
metric
5 4
5 4
00
11
10
01
5 5
7 3
00
00
10
01
00
11 11
00
10
01
10
01
Fig. 12.16. Viterbi decoding; Step 4

167
At t=4 (step 5), the received bits are 01 again (see Figure 12.17). Again the metrics are
computed for all paths. We discard all smaller metrics but keep both if they are equal.
00
01
10
11
00
11
Discrete time
Sta
tes
0 1 2 3 4
Incomming
bits 01 10 00 01
5 6 7
01 11 00
Path
metric
6 6
6 6
00
11
10
01
5 9
7 7
00
00
10
01
00
11
10
01
01
00
11
10
01
11
00
10
01
Fig. 12.17. Viterbi decoding; Step 5
At t=5 (step 6), the received bits are 11 (see Figure 12.18). After discarding the paths as shown,
we again go forward and compute new metrics.
00
01
10
11
00
11
Discrete time
Sta
tes
0 1 2 3 4
Incomming
bits 01 10 00 01
5 6 7
01 11 00
Path
metric
6 11
8 9
00
11
10
01
7 8
7 8
00
00
10
01
00
11
10
01
01
00
11
01
11
00
10
01
00
11
10
01
11
00
01
10
Fig. 12.18. Viterbi decoding; Step 6
At t=6 (step 7), the received bits are 00 (see Figure 12.19). Again the metrics are computed for
all paths. We discard all smaller metrics.
00
01
10
11
00
11
Discrete time
Sta
tes
0 1 2 3 4
Incomming
bits 01 10 00 01
5 6 7
01 11 00
Path
metric
13 8
11 10
00
11
10
01
10 9
10 9
00
00
10
01
00
11
10
01
01
11
01
11
00
10
01
00
01
11
00
10
00
11
01
10
11
00
10
01
Fig. 12.19. Viterbi decoding; Step 7
At t=7 (step 8) the trellis is complete (see Figure 12.20). After discarding the paths with the
smaller metric, we have the winner path left. The path traced by states 00, 10, 01, 10, 11, 01, 00, 00
and corresponding to bits 1011000 is the decoded sequence.

168
00
01
10
11
00
11
Discrete time
Sta
tes
0 1 2 3 4
Incomming
bits 01 10 00 01
5 6 7
01 11 00
Path
metric
1300
11
10
01
00
00
10
01
00
11
10
01
01
11
01
11
00
10
01
00
01
11
00
10
00
01
Fig. 12.20. Viterbi decoding; Step 8
As a result of reduction of paths entering each node mainly from two to one, there are only four
paths at each step. However, when the information bit stream is long, the amount of information that
must be stored in memory to record the four possible bit streams, and the error associated with each,
becomes enormous. For example, if data is sent at the rate of 10 Mbps for one second, 10 Mbits of
data is transmitted. The memory must therefore store more than 40 Mbits of data.
To reduce the data handling capability required of the decoder, the Viterbi algorithm presents
a sub-optimum procedure which truncates the trellis typically after P=5K nodes where K is the
constraint length. Thus if K=7, P=35 bits. When truncating the trellis we look at the trellis after P bits
are received. We then choose that path (remember there are four paths) with the fewest errors and
delete the remaining three paths. In this manner the memory is reduced to somewhat more than P bits
as after each decision the P/2 data information bits are outputted from the system.
The reason that Viterbi truncation technique is sub-optimum is that we are choosing the
minimum number of error from among the paths terminating at nodes corresponding to states when
K=L. Such a comparison is not optimum since each node yields a distinct path and is then not
comparable. An optimum system would make a decision only after receiving the entire message.
Fortunately the complexity of the Viterbi algorithm is linear in the code word length T. At each
time we have to add, compare and select in every state. The complexity is therefore also linear in the
number of states at each time, which is 4 in our case. In general the number of states is 2M where M
is the number of delay elements in the encoder. Therefore Viterbi decoding is in practice only possible
now if M is not much higher than say 10, i.e. the number of states is not much more than 210=1024.
Note that the code performance improves for increasing values of M.

169
13. MODULATION of DIGITAL SIGNALS
13.1 Phasor Representation of Signals
There are two key ideas behind the phasor representation of a signal:
a real, time-varying signal may be represented by a complex, time-varying signal; and
a complex, time-varying signal may be represented as the product of a complex number
that is independent of time and a complex signal that is dependent on time.
Let's be concrete. The signal
( ) cos( )s t A t (13.1)
illustrated in Figure 13.1, is a cosinusoidal signal with amplitude A, frequency ω, and phase φ. The
amplitude A characterizes the peak-to-peak swing of 2A, the angular frequency ω characterizes the
period 2 /T between negative-to-positive zero crossings (or positive peaks or negative peaks),
and the phase φ characterizes the time / when the signal reaches its first peak. The phase
angle simply translates the sinusoid along the time axis, as shown in Figure 13.1. A positive phase
angle shifts the signal left in time, while a negative phase angle shifts the signal right. With τ so
defined, the signal ( )s t may also be written as
( ) cos ( )s t A t . (13.2)
t
( )s t
A
2 1T
f
A
, 0
0
a)
t
( )s t
A
2 1T
f
A
0, 0
0
b)
t
( )s t
A
2 1T
f
A
, 0
0
c)
Fig. 13.1. A cosinusoidal signal; (a) advanced cosinusoidal signal, (b) cosinusoidal signal with zero phase angle, (c)
delayed cosinusoidal signal
A positive phase angle ( 0 ) shifts the signal curve left in time axis (see Figure 1, a), what
implies signal advance. A negative phase angle ( 0 ) shifts the signal curve right in time axis (see
Figure 1, c), what implies signal delay.
On the contrary, when τ is positive (phase negative), then τ is a “time delay” that describes the
time (greater than zero), when the first peak is achieved (see Figure 1, c). When τ is negative (phase
positive), then τ is a “time advance” that describes the time (less than zero), when the last peak was
achieved (see Figure 1, a).
For convenience, the terms leading and lagging when referring to the sign on the phase angle
is introduced. A cosinusoidal signal 1( )s t is said to lead another cosinusoid 2( )s t of the same
frequency if the phase difference between the two is such that 1( )s t is shifted left in time relative to
2( )s t . Likewise, 1( )s t is said to lag another cosinusoid 2( )s t of the same frequency if the phase
difference between the two is such that 1( )s t is shifted right in time relative to 2( )s t .
With the substitution
2 / T (13.3)
we obtain a third way of writing ( )s t
2
( ) cos ( )s t A tT
. (13.4)

170
In this form the signal is easy to plot. Simply draw a cosinusoidal wave with amplitude A and
period T; then strike the origin ( 0)t so that the signal reaches its peak at τ. The inverse of the period
T is called the “temporal frequency” of the cosinusoidal signal and is given the symbol f. f gives the
number of cycles of ( )s t per second. All above equations could be rewritten in terms of frequency f.
( ) cos(2 ) cos2 ( )s t A f t A f t , (13.5)
where 1
2f
T
,
2 f
.
In summary, the parameters that determine a cosinusoidal signal have the following units:
A, arbitrary (e.g., volts, amperes or meters/sec, depending upon the application);
ω, in radians/sec (rad/sec);
T, in seconds (sec);
φ, in radians (rad) or in degrees ( ), ( 2 rad is equal to 360 );
τ, in seconds (sec);
f, in (sec-1) or in hertz (Hz),
Thus, the conversion between radians and degrees can be expressed as:
Number of degrees=180
×Number of radians.
The signal ( ) cos( )s t A t can be represented as the real part of a complex number:
( ) Re[ exp ( )] Re[ e e ]j j ts t A j t A
We call e ej j tA the complex representation of ( )s t and write
( ) e ej j ts t A
meaning that the signal ( )s t may be reconstructed by taking the real part of e ej j tA . In this
representation, we call e jA the phasor or complex amplitude representation of ( )s t and write
( ) e js t A
meaning that the signal ( )s t may be reconstructed from e jA by multiplying with e j t
and taking
the real part. In communication theory, we call e jA the baseband representation of the signal ( )s t .
13.1.1 Geometric interpretation
At 0t , the complex representation e ej j tA produces the phasor e jA
. This phasor is
illustrated in Figure 2. In the figure, φ is approximately / 4 ( / 4 ). If we let t increase to
time t1, then the complex representation produces the phasor 1e e j tjA .
The multiplier 1e j t just rotates the phasor e jA
through an angle of 1t (see Figure 13.2).
Therefore, as we run t from 0, indefinitely, we rotate the phasor e jA indefinitely, turning out the
circular trajectory of Figure 13.2. When 2 /t then 2
2 /e e 1j t j
t
. Therefore, every 2 /
seconds, the phasor revisits any given position on the circle of radius A. Therefore e ej j tA
sometimes is called a rotating phasor whose rotation rate is the angular frequency :
( )d
tdt
. (13.6)
This rotation rate is also the frequency of the cosinusoidal signal ( ) cos( )s t A t .

171
e , 0, 0jA t
( , 0)A t
1
1e e ,j tjA t t
2
2
e e ,j tjA
t t
2 1( )t t
Re
Im
Fig. 13.2. Rotating phasor
In summary, e ej j tA is the complex representation of the signal ( ) cos( )s t A t , or the
rotating phasor representation of the signal ( ) cos( )s t A t . In this representation, multiplier ej t
rotates the phasor e jA through angles t at the rate . The real part of the complex representation
is the desired signal cos( )A t , while the imaginary part of the complex representation is the
sinusoidal signal sin( )A t .
The projection of the rotating phasor on the real axis traces out the desired signal cos( )A t
, as shown in Figure 13.3, while the projection of the rotating phasor on the imaginary axis traces out
the sinusoidal signal sin( )A t , also shown in Figure 13.3. In the figure, the angle φ is about
/ 4 .
The projection of the rotating phasor on the real axis is called in-phase (I) component of the
rotating phasor, while projection on the imaginary axis can be called the phase-quadrature (simply
quadrature – Q) component. In general, phase quadrature means 90 degrees out of phase, i.e., a
relative phase shift of / 2 .
A
Re
A
Ime ej j tA
t
/ , 0
0
2 /
( )s t
A
A
0 / ,
0
2 /
t
Q component
I component
e , 0 0jA t
Fig. 13.3. Illustration of rotating phasor projections on the real and imaginary axis
So, instead of figuring the cosinusoidal (or sinusoidal) signal as time function we can use its
phasor representation, what is more compact.

172
13.2 Modulation
In electronics and telecommunications, modulation is the process of varying one or more
parameters (amplitude A, phase or frequency ) of a periodic cosinusoidal waveform, called the
carrier signal (high frequency signal), with a modulating signal that typically contains information
to be transmitted.
In telecommunications, modulation is the process of conveying a message signal, for example
a digital bit stream or an analog audio signal, inside another signal that can be physically transmitted.
Modulation of a sine waveform transforms a baseband message signal into a passband signal.
A modulator is a device that performs modulation. A demodulator is a device that performs
demodulation, the inverse of modulation. A modem (from modulator–demodulator) can perform both
operations.
The aim of digital modulation is to transfer a digital bit stream over an analog band pass
channel, for example over the public switched telephone network (where a band pass filter limits the
frequency range to 300–3400 Hz), or over a limited radio frequency band.
The aim of analog modulation is to transfer an analog baseband (or low pass) signal, for
example an audio signal or TV signal, over an analog band pass channel at a different frequency, for
example over a limited radio frequency band or a cable TV network channel.
The most fundamental digital modulation techniques are based on keying [35–38]:
PSK (phase-shift keying): a finite number of phases is used;
FSK (frequency-shift keying): a finite number of frequencies is used;
ASK (amplitude-shift keying): a finite number of amplitudes is used;
QAM (quadrature amplitude modulation): a finite number of at least two phases and at
least two amplitudes are used.
The illustrations of the simplest binary modulation signals: PSK, FSK and ASK are presented
in Figure 12.4.
1 0 1 1 0a) Binary data to
be transmitted
d) BASK (OOK)
signal
e) BPSK signal
f) BFSK signal
b) Unipolar
modulation signal
c) Polar
modulation signal
1bT
R
( )s t
t
( )s t
t
( )s t
t
( )m t
t
t
( )m t
Fig. 13.4. Illustration examples of the simplest digitally modulated signals
ASK uses only two amplitudes: 0 for representing logical zeroes and A for representing logical
ones. Therefore it is called On-Off Keying (OOK) or Binary ASK. PSK uses two phases ( 0 for
representing logical zeroes and 180 for representing logical ones). It is titled Binary PSK (BPSK).

173
Binary FSK uses two possible frequencies: 1f and 2f for representing logical zeroes and logical ones
respectively.
13.3 Multilevel Modulation and Constellation Diagrams
For increasing bandwidth efficiency (transmitted data rate ratio with used bandwidth) more
sophisticated M-ary (multilevel) modulation schemes are employed [35–38]. These are M-ASK, M-
PSK, M-FSK and M-QAM. They use the major number M of amplitudes, phases or frequencies than
two, conventionally four, eight, sixteen, etc., generally 2BM , where B is the number of bits used
for encoding each amplitude, phase or frequency.
In all of the above methods, each of these phases, frequencies or amplitudes are assigned a
unique pattern of binary bits. Usually, each phase, frequency or amplitude encodes an equal number
of bits. This number of bits comprises the symbol that is represented by the particular phase,
frequency or amplitude.
If the alphabet consists of 2BM alternative symbols, each symbol represents a message
consisting of B bits. If the symbol rate (also known as the baud rate) is symbf symbols/second (or
baud), the data rate is symbB f bit/second. For example, with an alphabet consisting of 16 alternative
symbols, each symbol represents 4 bits. Thus, the data rate is four times the baud rate.
QAM is more sophisticated modulation. In QAM, an in-phase signal (or I, with one example
being a cosine waveform) and a quadrature phase signal (or Q, with an example being a sine wave)
are amplitude modulated with a finite number of amplitudes, and then summed. It can be seen as a
two-channel system, each channel using ASK. The resulting signal is equivalent to a combination of
PSK and ASK. The component parts PSK and ASK can use a finite number of phases and amplitudes.
Let‘s construct an example of QAM signal using ASK with two amplitudes (1 and 2) and PSK with
four phases (0, / 2 , , 3 / 2 ). This is the technique most often used. Combining possible PSK
and ASK variants, we get 8 possible waves that we can send. These 8 waves could correspond to 8
binary combinations, or code words, consisting of three bits. First step is to generate a table to show
us which waves correspond to which binary combination. This can basically be done at random,
although we will present the mostly used case in the following table 13.1.
Table 13.1 Correspondence between signal amplitudes and phases, and bit values
Bit values 000 001 010 011 100 101 110 111
Amplitudes 1 2 1 2 1 2 1 2
Phases 0 0 π/2 π/2 π π 3π/2 3π/2
Now, let’s encode the bit stream 001010100011101000011110 using this table. First of all, we
must break it up into 3-bit triads called symbols: 001-010-100-011-101-000-011-110. Now all we
have to do is to evaluate what the resulting signal should look like. Resulting waveform is depicted
in Figure 13.5.
001
2
1
-1
-2010 100 011 101 000 011 110
t
( )s t
8-QAM
signal
Fig. 13.5. Illustration example of 8-QAM modulated signal

174
In the case of PSK, ASK or QAM, where the carrier frequency of the modulated signal is
constant, the modulation alphabet is often conveniently represented on a constellation diagram,
showing the amplitude of the I signal at the x-axis, and the amplitude of the Q signal at the y-axis, as
a point for each symbol. These points are called constellation points. Otherwise, a constellation
diagram is a representation of a signal modulated by a digital modulation scheme such as quadrature
amplitude modulation or phase-shift keying. It displays the signal as a two-dimensional scatter
diagram in the complex plane at symbol sampling instants. In a more abstract sense, it represents the
possible symbols that may be selected by a given modulation scheme as points in the complex plane.
Measured constellation diagrams can be used to recognize the type of interference and distortion in a
signal.
Representation of modulated signals in the form of constellation diagram could be also applied
to simple harmonic signals as cosinusoidal or sinusoidal waveforms. In this case a constellation
diagram consists of one constellation point coinciding with the end-point of the phasor e jA .
Examples of constellation diagrams and corresponding simple signals, including cosinusoidal
signal, are presented in Figure 13.6.
10t
BPSK
signal
( )s t
Re
Im
ASK (OOK)
signal
t
( )s t
10 Re
Im
t
( )s t
A
Time function Phasor Costellation diagram
Cosinusoidal
signal
01 1Bits
0
Re
Im
t
A
0
Re
Im
Fig. 13.6. Examples of simple signals and their constellation diagrams
However, the low spectral efficiency of these modulations makes them inappropriate for the
transmission of high bit rates on channels with a bandwidth which is small as possible. In order to
increase the spectral efficiency of the modulation process, different kinds of more sophisticated
modulations, including quadrature modulations, are used. The more complicated modulations: 4-
ASK and 4-PSK or Quadrature PSK – QPSK and their constellations are presented in Figure 13.7.

175
Time function Costellation diagram
Im
4-PSK
- QPSK
signal
11t
( )s t
00
01
10
Re
0011 01Symbols 10
4-ASK
signal
0100 10 11 Re
Im
( )s t
t
Fig. 13.7. Examples of constellation diagrams and corresponding 4-ASK and 4-PSK signals
Even more complicated modulations are different kinds of quadrature amplitude modulations
(QAM) and high level phase shift keying (PSK) modulations. Some possible constellation diagrams
for 8-QAM (two versions), 8-PSK and 16-QAM (two versions) signals are presented in Figure 13.8.
111
100
Gray encoded
8-PSK
110
001
010
011
000 101
Re
Im0000
1110
Square 16-QAM
0001
1101
0010
0011
1111 0111
Re
Im1000
1001
1010
1011
1100 0110
0101
0100
1
1-1
-1-3 3
3
-3
0000
1011
0001
0100
1010
0111 0101
0011
Re
Im
1001
0110
0010
1000
1100
11011111
1110
16-APSK
(4+12-APSK)
(Circular 16-QAM)
000
001
010
011
100
101
110
111
Re
Im
8-APSK
(4+4-APSK)
(Circular 8-QAM)
000
8-APSK
(4+4-APSK)
(Circular 8-QAM)
001
010
011
100
101
110
111
Re
Im
Fig. 13.8. Constellation diagrams for 8-APSK, 16-APSK, Gray encoded 8-PSK and square 16-QAM
The first picture in Figure 13.8 represents a circular 8-QAM constellation. It is known to be the
optimal 8-QAM constellation in the sense of requiring the least mean power for a given minimum
Euclidean distance (the shortest straight-line distance between two points). The second picture is a
circular 8-QAM constellation for the same signal which is shown in Figure 13.5. 8-PSK constellation
diagram is for the Gray encoded signal. The codes of the neighboring points of this constellation
differ only in one bit. This determines the better signal resistance to noise comparing with signals
with other encoding of 8-PSK constellation points. Explanation of this phenomenon is presented in
Figure 13.9.
Original
signal phasorNoise phasor
Signal+noise
phasor
A
111
100
Gray encoded
8-PSK
110
001
010
011
000 101
Re
Im
A
B C
O
Boundaries of decision
making areas
Not Gray encoded
8-PSK
101
111
100
001
011
010
000 110
Re
Im
O
B C
Fig. 13.9. Illustration of the influence of constellation points coding to signal resistance to noise

176
Figure 13.9 shows two 8-PSK constellations with different encoding of points, phasors of
original signal, noise and signal+noise and some boundaries of decision making areas. It is evident
that the additive noise, acting in a communication channel, changes the received signal phasor,
shifting its end point to new position. Since the receiver’s decision making block decides about the
information, carried by the received signal, depending on the position of its phasor, shifting phasor’s
end point may cause decision errors. For example (see Figure 13.9), the noise shifts the received
signal+noise phasor from the area AOB with the code 000 to the area BOC with the code 100 in the
case of Gray encoding, and to the area BOC with the code 111 in the case of not Gray encoding. In
the Gray encoding case only one bit will be in error, in the not Gray encoding case even three bits
will be in error. So, the Gray encoding in average results in the better performance of modulation
scheme in noise corrupted environment.
It is the nature of QAM that most orders of constellations can be constructed in many different
ways. There are two main types: circular and square QAM. They differ not only by their form but
also by their properties. Note a square QAM constellation can be constructed only when the number
of bits composing each symbol is even, i.e., 2, 4, 6, etc. If circular QAM constellations are composed
of nR concentric rings, each with uniformly spaced PSK points, they are called APSK (Amplitude or
Asymmetric Phase-Shift Keying) constellations. They can be considered as a superclass of QAM.
The advantage over conventional QAM, for example 16-QAM, is lower number of possible amplitude
levels, resulting in fewer problems with non-linear amplifiers. Two diagrams of circular QAM
(APSK) constellations are shown in Figure 13.9. They are for 8-APSK and 16-APSK. 8-APSK
constellation is for the same signal is shown in Figure 13.5. Generally APSK has been proposed in
the framework of the DVB-S2 standard [90]. Also the rectangular 16-QAM constellation is presented
(see the last, the 5th, picture in Figure 13.9). This constellation is recommended for use in Digital
Video Broadcasting Cable and Terrestrial systems (DVB-C and DVB-T) [88, 89].
13.4 Quadrature Modulators and Demodulators
All above discussed PSK and QAM signals may be formed, i.e., modulated using quadrature
modulators and may be demodulated using quadrature demodulators [35–38]. Figure 13.10 represents
schematically the block diagram of quadrature modulator and demodulator. Input symbols coded on
n bits are converted into two sequences I (in-phase) and Q (quadrature), each coded on n/2 bits,
corresponding to 2n/2 states for each of the two sequences. After digital-to-analog conversion (DAC)
I and Q sequences are converted to analog I and Q signals. I signal modulates one local oscillator
output and Q signal modulates another output which is in quadrature (phase shifted by / 2 ) with
the first one.
Modulating signals
Modulated
signal
( )Ts t
sin ct
cos ct
Quadrature
demodulator
/ 2
Local
oscillator
Low pass
filtering
( )TI t
( )TQ t
/ 2
LOLO
cos ct
sin ct
Local
oscillator
( )RQ t
( )RI t
( )Rs t
Quadrature
modulator
Low pass
filtering
Fig. 13.10. Schematic block diagram of quadrature modulator and demodulator

177
13.5 Inter-Symbol Interference
Digital signals are streams of rectangular pulses representing 0’s and 1’s. Many bits can be
combined to form symbols in order to increase the spectral efficiency of the modulation. However
the frequency spectrum of such digital signals is theoretically infinite. This requires theoretically
infinite bandwidth for their transmission, what is impossible. Bandwidth limiting of a signal by means
of conventional filtering results in a theoretically infinite increase of its temporal response, which
would result in overlapping between successive bits or symbols. This effect is called inter-symbol
interference (ISI) [35–38]. It could cause incorrect interpretation of the received waveform
representing received symbols (bits). Illustration of ISI on received pulses is presented in
Figure 13.11.
t0
0 0 0
0
1
t sT
Transmitted
pulses
Received
individual pulses
(individual pulse
response)
Received sum of
pulses
(sum of pulse
responses)
Inter-symbol interfence
sT t0
sT
t0
01 1 1
0 t 0
sTsT tsT
Fig. 13.11. Illustration of ISI on received pulses; Ts is the symbol period (in the partial case, the bit period)
To avoid this problem, special filtering, satisfying the first Nyquist criterion, should be applied
[35–38]. The essence of the first Nyquist criterion is that the temporal response of a Nyquist filter
must present zeroes at times which are multiples of the symbol (bit) period Ts. There are a lot of
Nyquist filters that meet this requirement. The most commonly used filter is called a raised-cosine
(RC) filter. In order to optimize the bandwidth occupation and the signal-to-noise ratio at the same
time, filtering is shared equally between the transmitter and receiver, each of which composes a half-
Nyquist filter called root-raised-cosine (RRC) filter, sometimes known as square-root-raised-cosine
(SRRC) filter. This filter is characterized by so called roll-off factor α, which defines its frequency
response slope steepness. Figure 13.12, a shows the frequency response curve of RC filter for three
values of roll-off-factor and Figure 13.12, b shows the corresponding temporal response.
HRC( f )
α=0
α=0,5
α=10,2
0,4
0,6
0,8
1,0
f0 12 sT
1
sT3
4 sT1
2 sT3
4 sT1
sT
a)
hRC(t)
t
α=1
α=0,5
α=0
-0,2
0
0,2
0,4
0,6
0,8
1,0
Ts 2Ts-3Ts 0 4Ts-Ts-2Ts 3Ts-4Ts 5Ts-5Ts
b)
Fig. 13.12. Characteristics of raised-cosine filter for three values of the roll-off factor; (a) – frequency response, (b) –
temporal response

178
The temporal response shows the presence of zeroes at instants that are multiples of the symbol
period. Figure 13.13 shows temporal responses caused by a series of the identical pulses, representing
a series of the identical symbols (1’s), which repetition period is equal to symbol period Ts.
t
0 sT 2 sT 3 sT 4 sT
Gain
Fig. 13.13. Frequency responses of Nyquist filter (RC filter) caused by a series of pulses
As follows from Figure 13.13, all responses fully overlap and take zero values at instants that
are multiples of the symbol period, except one, which takes the maximum value. In order to reduce
the ISI to minimum, the received signal will have to be sampled at these instants. In this case the
value of sampled signal will be equal to the maximum value of response caused only by one symbol.
Thus the influence of other symbols will be avoided.
For a signal with symbol period Ts the bandwidth F occupied after Nyquist filtering with a
roll-off factor α is expressed by formula [35–38]
1
2 s
FT
. (13.7)
13.6 Coded Orthogonal Frequency Division Multiplexing
13.6.1 Introduction
Coded Orthogonal Frequency Division Multiplexing (COFDM) is a form of modulation which
is particularly well-suited to the needs of the terrestrial broadcasting channels [82, 91, 92, 93].
COFDM can manage with high levels of multipath propagation, with a wide spread of delays between
the received signals. This leads to the concept of single-frequency networks in which many
transmitters send the same signal on the same frequency, generating “artificial multipath”. COFDM
also manages well with co-channel narrowband interference, as may be caused by the carriers of
existing analogue services. COFDM has therefore been chosen for two standards for broadcasting –
DAB (Digital Audio Broadcasting) and DVB-T (Digital Video Broadcasting – Terrestrial), both of
which have been optimized for their respective applications and have options to suit particular needs.
The special performance of COFDM in respect of multipath and interference is only achieved by a
careful choice of parameters and with attention to detail in the way in which the forward error-
correction coding is applied.
The work on this system was initiated by CCETT (Centre commun d'études de télévision et
télécommunications – Centre for the Study of Television Broadcasting and Telecommunication) in
France and developed into a major new broadcasting standard by a collaborative project, Eureka 147.
COFDM involves modulating the data onto a large number of carriers using the FDM
(Frequency Division Multiplexing) technique. The key features which make it work, in a manner that
is so well suited to terrestrial channels, include:
orthogonality (the “O” of COFDM);
the addition of a guard interval;

179
the use of error coding (the “C” of COFDM), interleaving and channel-state information
(CSI).
13.6.2 Effects of multipath propagation
The main problem with reception of radio signals is fading caused by multipath propagation
[91, 92, 93]. Delayed signals are the result of reflections from trees, hills or mountains, or objects
such as people, vehicles or buildings and so on. The main characteristic of frequency selective fading
is that some frequencies are enhanced whereas others are attenuated. This is clearly illustrated in
Figure 13.14.
Frequency
Amplitude Time or position
Fig. 13.14. Typical frequency response of a time-varying channel example
When the receiver and all the objects influencing the reflections remain stationary, then the
effective frequency response of the channel from the transmitter to the receiver will be basically fixed.
If the wanted signal is relatively narrowband and falls into part of the frequency band with significant
attenuation then there will be flat fading and reception will not be satisfactory. If there is some
movement either of the receiver or of any of the surroundings, then the relative lengths and
attenuations of the various reception paths will change with time.
A narrowband signal will vary in quality as the peaks and hollows of the frequency response
move around in frequency. There will also be a noticeable variation in phase response, which will
affect all systems using phase as a modulation parameter.
Now consider a wideband signal. Some parts of the signal may be enhanced in level, whereas
others may be attenuated, sometimes to the point of extinction. In general, frequency components
close together will suffer variations in signal strength which are well correlated. Others which are
further apart will be less well correlated. The correlation bandwidth is often used as a measure of this
phenomenon. Some researchers also use the term “coherence bandwidth”. It is evaluated from the
empirical equation [91, 92]
coh1
2F
D , (13.8)
where D is average delay time of echoes. Results of statistical measurements show coherence
bandwidths of about 0,25–1 MHz in the VHF band, subject to the correlation level chosen in the
range 0,5–0,9.
For a narrowband signal, distortion is usually minimized if the bandwidth is less than the
coherence bandwidth of the channel. However, the signal will be subject to severe attenuation on
some occasions. A signal which occupies a wider bandwidth, greater than the coherence bandwidth,
will be subject to more distortion, but will suffer less variation in total received power.
If we look at the temporal response of the channel, we see a number of echoes present. There
are many different types of echo environment which are typical of different geographical areas. In
cities, echoes come from reflections from buildings with a large range of delays. In the countryside,
the echoes have usually a smaller range of delay, especially if there are no nearby hills.
COFDM is a wideband modulation scheme which is specifically designed to manage with the
problems of multipath reception. It achieves this by transmitting a large number of narrowband digital
signals over a wide bandwidth.
Multiple carriers

180
In COFDM, the data are divided between a big number of closely-spaced carriers [82, 91, 92].
This explains the use of the words “frequency division multiplex” in the name COFDM. Only a small
amount of the data is carried on each carrier, and this significantly reduces the influence of
intersymbol interference.
For a given overall data rate, increasing the number of carriers reduces the data rate that each
individual carrier must carry, and hence (for a given modulation system) lengthens the symbol period.
This means that the intersymbol interference affects a smaller percentage of each symbol as
the number of carriers and hence the symbol period increases.
Suppose, we transmit the carrier with a particular phase and amplitude, that depends on the
transmitted symbol and used constellation. Each symbol carries a number of bits of information.
Imagine that this signal is received via two paths, with a delay between them. Let us examine
reception of the nth symbol, as an example. The receiver will try to demodulate the data that was
placed in this symbol by examining the directly received information and the delayed information
relating to the nth symbol.
When the delay of the signal received via the second path is more than one symbol period, this
signal acts purely as interference between two or more symbols, since it only carries information
belonging to a previous symbol or symbols. Such effect is called intersymbol interference (ISI). ISI
distorts the signal and this distortion could degrade it. ISI situation is illustrated in Figure
13.15, a. This means that on purpose to receive undistorted information only a very small time interval
of the delayed signal can cover the wanted signal. When the delay is less than one symbol period,
part of the signal received via the second path acts also purely as interference. However this part
carries information belonging only to the previous symbol. The rest of it carries the information from
the wanted symbol (see Figure 13.15, b). The signal representing this information may be added to
the signal of the main path enhancing or attenuating it subject to the delayed signal phase. This is not
intersymbol interference, but a form of linear distortion. Thus, it would be a great advantage if the
delay would be not greater than a small part of the symbol period. For this, we have to reduce the
symbol rate what is equivalent to the extension of the symbol period.
Symbols of
the main path
t
nth symbol(n-1)st symbol
Processing
(integration) period
Symbols of the
delayed path
(n+1)st symbol
(n-2)nd symbol(n-3)rd symbol
Both act as ISI
a)
Symbols of
the main path
t
nth symbol(n-1)st symbol
Processing
(integration) period
Symbols of the
delayed path
(n+1)st symbol
nth symbol(n-1)st symbol
Acts as ISI Acts subject to the phase
b)

181
Symbols of
the main path
t
nth symbol(n-1)st symbol
Processing
(integration) period
Symbols of the
delayed path
(n+1)st symbol
nth symbol(n-1)st symbol
Acts as ISI c)
Fig. 13.15. Illustration of intersymbol interference formation; (a) – situation with large delay, (b) – situation with
small delay, (c) situation with small delay and prolonged symbol period
If one carrier cannot ensure the symbol rate which is required, this could be done using a large
number of carriers. For this, the high-rate data have to be divided into many low-rate parallel streams
each of which have to be assigned to an individual carrier. This is a form of FDM explaining the name
COFDM. Decreasing of data rate naturally implies prolongation of the symbol period. ISI situation
with naturally prolonged symbol period due to the introduction of large number of carriers is
illustrated in Figure 13.15, c.
In principle, many modulation schemes could be used to modulate the data at a low bit rate onto
each carrier. In Digital Audio Broadcasting (DAB), for example, differential quadrature phase shift
keying (DQPSK) is used. Digital Video Broadcasting Terrestrial (DVB-T) uses various kinds of
QAM and QPSK.
Even when the delay is less than one symbol period and signal processing period includes these
overlapping symbols, as one can see in Figure 13.15, c, some ISI from the previous symbol remains
and corrupts the received symbol. This could be eliminated if the period of each transmitted symbol
artificially were made longer than the period over which the receiver processes (integrates) the signal.
The realization of such symbol period artificial prolongation could be done by adding a guard interval.
The validity of adding of a guard interval could be much better explained after discussion about the
carriers’ distribution along the frequency axis.
13.6.4 Orthogonality
In a normal FDM system, the many carriers are spaced apart in such a way that the signals can
be received using conventional filters and demodulators. In such receivers, guard bands have to be
introduced between the modulation sidebands related to the different carriers. However the
introduction of these guard bands results in the decreasing of spectrum efficiency.
It is possible, however, to space the carriers in a COFDM signal so that the sidebands of the
individual carriers overlap and the signals can still be received without adjacent carrier interference.
In order to do this the carriers must be mathematically orthogonal [91, 92].
The receiver acts as a bank of demodulators, translating each carrier down to DC, the resulting
signal then being integrated over a symbol period to recover the raw data. If the other carriers all
translated down to frequencies which, in the time domain, have a whole number of cycles in the
symbol integration period Tu, then the integration process results in zero contribution from all these
other carriers. Thus the carriers are linearly independent (i.e. orthogonal) if the carrier spacing is a
multiple of l/Tu.
Mathematically, suppose we have a set of carriers , where k is the complex envelope of
the kth carrier in baseband representation. It can be written as
2( ) , 1/ujk f t
k u ut e f T
. (13.9)
The carriers will be orthogonal if [35–38]

182
( ) ( ) 0, ,
( ) ( ) , ,
u
u
T
k l
T
k l u
t t dt k l
t t dt T k l
(13.10)
where sign * indicates the complex conjugate.
Detailed analysis of the above orthogonality condition discloses one very interesting and
important feature of orthogonal carriers: the signal integration period Tu always contains the whole
number of periods of every carrier. Moreover, the difference of numbers periods of neighboring
carriers is equal to one and of non-neighboring carriers is equal to some whole number. Therefore a
radio pulse containing the whole number of periods is formed during each signal integration period
Tu. The spectrum of such pulse has the sin x x function shape. The spectra of many radio pulses
composing COFDM signal spectrum are illustrated in Figure 13.16.
f
N carriers, F = fu (N-1)
1/u uf T Overal envelope
of spectrum
Fig. 13.16. Illustration of COFDM signal spectrum
It is clearly seen that spectra of all carriers fully overlap. It is impossible to select and to separate
those using common filtering methods. Therefore the classical demodulation methods used in
common FDM systems are also unacceptable. The correlation processing is needed.
The essence of correlation processing is seen from the carriers’ orthogonality condition
equations (13.10). Actually these equations represent the common procedure of demodulating a
carrier by means of multiplying it by another carrier of the same frequency and then integrating the
result. Note that exactly these mathematical operations compose the essence of the correlation
method. The result of multiplication is a carrier, being demodulated, translated down to zero
frequency, i.e., DC. Then, integrating mathematically results in some constant value of which depends
on the duration of the integration period and physically results in some voltage level. The
multiplication by another carrier of not the same frequency results in translation down to the
differential frequency of two being multiplied carriers. The differential frequencies of the carriers are
integer multiples of frequency uf . Therefore after multiplication the components of the differential
frequencies have an integer number of cycles during the integration period Tu, and thus will be
integrated to zero. In other words there is no interference contribution.
Hence, without any filtering, it is possible separately to demodulate all the carriers taking the
advantage of the particular choice for the carrier spacing. Furthermore, no guard bands are needed.
The carriers are closely spaced so that they occupy the same spectrum in total as would a single carrier
modulated with all the data.
13.6.5 Guard interval
If the integration period covers two symbols (see Figure 13.15), actually the same-carrier
interference and inter-carrier interference (ICI) come into play causing linear distortions and ISI

183
respectively. ISI are formed because the components with the differential frequencies from other
carriers do not longer integrate to zero as they change in phase and/or amplitude during the integration
period. The orthogonality condition is violated. These changes occur since the delayed symbol start
time is later than of the main symbol and at least a partial symbol transition within its integration
period takes place. To avoid this artificial adding of a guard interval is proposed [91, 92]. The guard
interval ensures that during the integration period all the information comes from the same symbol
and appears constant during it.
The addition of a guard interval is illustrated in Figure 13.17. The segment added at the
beginning of the symbol and forming the guard interval is identical to the segment at the end of the
symbol. As the delay is less than the guard interval, all the signal components within the integration
period come from the same symbol and the orthogonality criterion is satisfied. ICI and ISI will only
occur when the delay exceeds the guard interval.
Symbols of
the main path
t
nth symbol(n-1)st symbol
Processing
(integration) period
Symbols of the
delayed path
(n+1)st symbol
nth symbol(n-1)st symbol
Guard interval
Fig. 13.17. Illustration of the formation of a guard interval
The guard interval length must be larger than the delay time, but at the same time it must be as
short as possible because it reduces of no avail the data rate. In the case of very long delays the guard
interval has to be chosen large. This is possible by increasing signal integration period uT , implying
a large number of carriers – from hundreds to thousands.
13.6.6 Generation and demodulation of COFDM signal
As we have seen, a large amount of filters was avoided due to the orthogonality of the carriers.
However the questions remain:
How to generate thousands of carriers?
How to implement the demodulation of carriers avoiding thousands of multipliers and
integrators?
In practice, we work with the digitized signal sampled according to the Nyquist theorem. The
process of integration in digital form then becomes one of summation, and the whole demodulation
process takes on a form which is identical to the Discrete Fourier Transform (DFT). In turn, the
process of generation of COFDM signals from the input data takes on a form which is identical to the
Inverse Discrete Fourier Transform (IDFT). Fortunately, computationally efficient Fast Fourier
Transform (FFT) implementations of DFT and Inverse Fast Fourier Transform (IFFT)
implementations of IDFT exist and variety of integrated circuits is available in the market. So it is
relatively easy to build COFDM equipment wherein IFFT is used in the transmitter to generate the
COFDM signal and FFT is used in the receiver to demodulate the COFDM signal. Common versions
of the FFT and IFFT operate on a group of 2N samples. FFT operates on the samples taken in the
integration period and deliver the same number of frequency coefficients. These correspond to the
data demodulated from the many carriers. IFFT operates on the data samples and deliver the same
number of the COFDM signal samples.
At the transmitter, the signal is defined in the frequency domain. It is a sampled digital signal,
and it is defined such that the discrete Fourier spectrum exists only at discrete frequencies. Each
COFDM carrier corresponds to one element of this discrete Fourier spectrum. The amplitudes and

184
phases of the carriers depend on the data to be transmitted and are defined for each transmitted
symbol. All the carriers have their data transitions synchronized, and can be processed together,
symbol by symbol. A schematic diagram of the transmitter signal processing is shown in
Figure 13.18, a and of receiver signal processing in the Figure 13.18, b.
Ser
ial
to p
aral
lel
con
ver
ter
FFT-1
Digital to
analog
converter
Digital to
analog
converter
Modulator
Re
Im
Constellation
mapping
Serial data
input
X0
X1
XN-2
XN-1
a)
Analog
Front-End Demodulator
Analog to
digital
converter
Analog to
digital
converter
FFT
Re
Im Par
alle
l to
ser
ial
conver
ter
Symbol
detection
Serial data
output
b)
Fig. 13.18. Signal processing diagrams; (a) – at the transmitter, (b) – at the receiver
13.6.7 Coding
The forward error-correction coding (FEC) is used in almost any practical digital
communication system. FEC ensures the delivery of an acceptable bit-error ratio (BER) at a
reasonably low signal-to-noise ratio (SNR). At a high SNR FEC is not necessary – and this is also
true for uncoded OFDM, but only when the channel is relatively flat. Uncoded OFDM does not
perform very well in a selective channel [91, 92].
Very simple examples will illustrate this point of view. If there is an echo as strong as the main
path signal which is delayed that every mth carrier is completely extinguished, then the symbol error
rate (SER) will be equal to 1/ m – even at infinite SNR. (Here, symbol denotes the group of bits
carried by one carrier within one OFDM symbol). An echo delay of / 4uT , what corresponds to the
maximum guard interval used in COFDM systems, would cause the SER to be 1/4. Similarly, if there
is one carrier, amongst N carriers in all, which is badly affected by interference, then the SER will be
of the order of 1/N, even with infinite SNR.
This enables us to formulate two conclusions:
uncoded OFDM is not satisfactory for practical use in the case of extremely selective
channels;
extinction of one carrier due to the interference results in a less problem than the presence
of a very strong echo.
The solution is to use convolutional coding in conjunction with Viterby decoding, properly
integrated with the OFDM system.
Thus, the necessity of implementing of coding justifies the use of term “coded” in the COFDM
title.

185
13.6.8 Inserting pilot cells
Each communication channel influences the transmitted signal by unevenly attenuation and
different phase shift of the different signal frequency components. This causes the appropriate shift
of transmitted signal constellation points from their original positions. Therefore before determining
which constellation point was transmitted, and hence what bits were transmitted, the receiver must
somehow to determine the response of the channel for each carrier. To do this in DVB-T [82], some
pilot information is transmitted (so-called scattered pilots) so that, in some symbols on some carriers,
known information (known sequence of bits) is transmitted (see Figure 13.19). Such sequences are
called learning or training sequences and preambles. Comparing the received signal carrying this
information with the known original version the receiver is able to determine the channel frequency
response and to eliminate its influence, i.e. to equalize all the constellations which carry data. For this
the equalizing filter is used which may need to be an adaptive filter adjusting itself to minimize the
distortions caused by channel frequency response.
Frequency
Tim
e
Scattered pilot cell
Fig. 13.19. Illustration of inserting pilot cells as is used in DVB-T
13.6.9 Interleaving
If the relative delay of the echo is very short, then the notches in the channel’s frequency
response will be broad, affecting many adjacent carriers. At the receiver this would cause the Viterbi
decoder to be fed with clusters of unreliable bits. This will cause a serious loss of performance. To
avoid this interleaving of the coded data before assigning them to OFDM carriers at the modulator is
used. Corresponding de-interleaver is used at the receiver before decoding. In this way, the cluster of
errors occurring when adjacent carriers break down simultaneously is broken up, enabling the Viterbi
decoder to perform better. Such interleaving process is called frequency interleaving. However it
works if the channel characteristics only vary slowly with time. The DVB-T system channels satisfy
these conditions.
13.6.10 Choice of COFDM parameters
13.6.10.1 Bandwidth
The bandwidth must be much wider than the coherence bandwidth. Only in this case we can
expect that not all carriers will be affected by frequency selective fading. The most problem here are
short relative delays of the echoes. However they exist forever and it is impossible to avoid them.
Moreover, the required bit rate directly influences the bandwidth. For example, in the case of
64QAM modulation the spectrum efficiency is 6 bit/s/Hz. However, considering the necessity to
insert the guard interval, to add additional FEC bits, and to transmit service information, the effective
spectrum efficiency decreases approximately to 3-4 bit/s/Hz. In the meantime the MPEG-4 coder
transport stream amounts to 2,5-3,5 Mbit/s. It follows from this that approximately 0,75-1,2 MHz
bandwidth is needed for transmission of one TV program. For example, the chosen total bandwidth
of one TV channel in Lithuania is 7,607 MHz. This means that it is possible to transmit to 10 programs
over one physical channel in Lithuania.

186
13.6.10.2 Number of carriers
The more carriers ensure the greater resolution of the diversity offered by the system. There is,
however, a relationship between symbol period and the carrier spacing. The carrier spacing is
1/u uf T . As was discussed above, the multipath environment must change slowly from symbol to
symbol. Thus there is a limit to the symbol period and hence the number of carriers. For static
reception, this is not a major problem. For mobile reception, however, the motion of a receiver which
is located in a car leads to changes in the multipath environment. Over a symbol period a car moving
at a velocity v m/s will travel /uvT f c wavelengths, where f is the carrier’s frequency, and c is the
speed of light. However this is equal to D uf T wavelengths, where Df , is the maximum Doppler shift.
Move of a car introduces phase distortion of the carrier. On purpose to introduce negligible phase
distortion the product D uf T must be small. It was found that a suitable value of this product is of
/ 0,02D u uf T vT f c . (13.11)
In the common case the maximum velocity of a moving receiver (car) is estimated as to be
equal to 160 km/h. Therefore, as follows from the last equation, may need to use the different number
of carriers in the different parts of the VHF (30-300 MHz) and UHF (300-3000 MHz) frequency
bands.
13.6.10.3 Guard interval
If it were only single transmitters, then the significant echoes would all be relatively short,
approximately 10 µs for the majority of locations. In the case of several transmitters the transmissions
from far areas can reach quite high signal levels on occasions of irregular propagation. Therefore is a
strong possibility that interference from remote transmitters may cause a problem. This could be
avoided if there would be sufficiently strong signal from the local transmitter. For this the distance
between transmitters and their power have to be correctly chosen. It is proved that the cheapest
solution of that problem is spacing of relatively high power transmitters by about 50 km. Therefore
the maximum guard interval is set to about 250 µs what corresponds to a maximum difference of
about 80 km in transmission distance. The symbol period need to be properly greater than guard
interval because the power transmitted in the guard interval is not useful. To minimize the power loss,
it is desirable to keep the guard interval to as low a percentage as possible of the symbol period. In
practice the maximum guard interval of the order of 25% of the symbol period has been chosen. This
leads to a symbol period of 1 ms. and hence, as follows from the equation 1/u uf T , to a carrier
spacing of about 1 kHz.
Practically this allows avoiding the influence of echoes delayed by about 200 µs.
13.6.10.4 Main COFDM parameters of Lithuanian DVB-T system
The total bandwidth - 7,607 MHzF ;
The number of carriers 6817K (short notation – 8K);
The symbol period 896 μsuT ;
The carrier spacing 1116Hzuf ;
Allowable the guard interval durations 224,112, 56, 28μs ; Allowable relative
durations of the guard interval / 1 / 4,1 / 8,1 /16,1/ 32uT ;
Allowable total symbol durations 1120,1008, 952, 924μsS uT T ;

187
14. CHARACTERISTICS of DVB STANDARDS
14.1 DVB-T system
Functional block diagram of the DVB-T system is presented in Figure 14.1. The system is
defined as the functional block of equipment performing the adaptation of the baseband TV signals
from the output of the MPEG-2 transport multiplexer, to the terrestrial channel characteristics. The
following processes must be applied to the data stream:
transport stream adaptation and randomization for energy dispersal;
outer coding (i.e. Reed-Solomon coding);
outer interleaving (i.e. convolutional interleaving);
inner coding (i.e. punctured convolutional coding);
inner interleaving;
mapping and modulation;
Orthogonal Frequency Division Multiplexing (OFDM) transmission.
1
2
n
188 b
yte
s
segm
ents
Splitter
OFDM
Guard
interval
insertion
DAC Front-End
Outer encoding Inner encoding
Insertion of
pilots and
TPS signals
High priority bit strem
Low priority bit stream
188 bytes segments
MPEG encoders and multiplexers
...
Bit stream
adaptation
Energy
dispersal
Bit stream
adaptation
Energy
dispersal
Outer coder
RS(204,
188, 8)
Outer
interleaver
Inner
interleaverMapper
Outer coder
RS(204,
188, 8)
Outer
interleaver
Inner
coder
Inner coder
Video encoder
Audio encoder
Data Ele
men
tary
str
eam
mult
iple
xer
Tra
nsp
ort
str
eam
mult
iple
xer
Fig. 14.1. Functional block diagram of the DVB-T system
The DVB-T standard has been designed to be compatible with all existing TV systems in the
world with channel widths of 6, 7 or 8 MHz. It is mainly used with channel widths of 7 MHz in
Europe (VHF band), Australia and 8 MHz in Europe (UHF band). It has also been designed in order
to be able to coexist with analog TV transmissions. Therefore the means for good protection against
adjacent channel interference (ACI) and Co-Channel Interference (CCI) (interference from within the
channel itself) have been provided. It is also a requirement that the system allows the maximum
spectrum efficiency when used within the VHF and UHF bands. This requirement can be achieved
by utilizing Single Frequency Network (SFN) operation.
To achieve these requirements an OFDM system with concatenated error correcting coding is
being specified. To maximize commonality with the DVB-S specification [89] and DVB-C
specification [88] the outer coding and outer interleaving are common, and the inner coding is
common with the DVB-S specification. To allow optimal compromise between network topology
and frequency efficiency, a flexible guard interval is specified. This enables the system to operate

188
efficiently under different network configurations, such as large area SFN and single transmitter,
while keeping maximum frequency efficiency.
Two modes of operation, a "2K mode" (1705 carriers in total, among them 1512 active) and an
"8K mode" (6817 carriers in total, among them 6048 active) for 7 and 8 MHZ channels are defined
for DVB-T and DVB-H transmissions. The "2K mode" is suitable for single transmitter operation and
for small SFN networks with limited transmitter distances. The "8K mode" can be used both for single
transmitter operation and for small and large SFN networks.
The system allows different levels of QAM modulation and different inner code rates to be used
to trade bit rate versus ruggedness. The system also allows two level hierarchical channel coding and
modulation, including uniform and multi-resolution constellation. For this the splitter separates the
incoming transport stream into two independent MPEG transport streams referred to as the high-
priority and the low-priority stream. In this case the functional block diagram of the system must be
expanded to include the modules shown dashed in Figure 14.1. Two independent MPEG transport
streams are mapped onto the signal constellation by the Mapper and the Modulator which therefore
has a corresponding number of inputs.
14.1.1 Splitter
The splitter separates the incoming transport stream into two independent MPEG transport
streams referred to as the high-priority (HP) and the low-priority (LP) stream. Two streams are
mapped onto the signal constellation by the Mapper and Modulator which therefore has a
corresponding number of inputs. The only additional requirement placed on the receiver is the ability
for the demodulator/de-mapper to produce one stream selected from those mapped at the sending end.
It may be used to transmit, for example a standard definition SDTV signal and a high definition
HDTV signal on the same carrier. Generally, the SDTV signal is more robust than the HDTV one.
At the receiver, depending on the quality of the received signal, the receiver may be able to decode
the HDTV stream or, if signal strength lacks, it can switch to the SDTV one. In this way, all receivers
that are close to the transmission site can lock the HDTV signal, whereas all the other ones, even the
farthest, may still be able to receive and decode an SDTV signal.
14.1.2 Transport stream adaptation and randomization
The MPEG-2 transport is organized in fixed length packets as is shown in Figure 14.2. The total
packet length is 188 bytes. This includes 1 sync-word byte (i.e. 01000111) and 187 data bytes. The
processing order at the transmitting side must always start from the Most Significant Byte (MSB)
(i.e. "0") of the sync-word byte.
MPEG-2 transport stream data
187 bytes
SYNC
1 byte
Fig. 14.2. MPEG-2 transport stream packet
In order to ensure adequate binary transitions, the data of the system input must be randomized
using the scrambler/descrambler whereof schematic diagram is depicted in Figure 14.3.

189
XOR
XORAND
Enable
00000011...
Randomized /
de-randomized
data output
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15
1 0 0 1 0 1 0 1 0 0 0 0 0 0 0
Clear data input for
randomization /
randomized data input
for de-randomization
(MSB first) Fig. 14.3. Scrambler/descrambler schematic diagram
Loading of the initial sequence "100101010000000" into the Pseudo Random Binary Sequence
(PRBS) – Pseudo Noise (PN) registers, as indicated in Figure 14.3, must be initiated at the start of
every eight transport packets. To provide an initialization signal for the descrambler, the MPEG-2
sync byte of the first transport packet in a group of eight packets is bit-wise inverted from 01000111
(SYNC) to 10111000 (SYNC ). This process is referred to as "transport stream adaptation" (see
Figure 14.4). The first bit at the output of the PRBS generator will be applied to the first bit (i.e.,
MSB) of the first byte following the inverted MPEG-2 sync byte (i.e., 10111000). To aid other
synchronization functions, during the MPEG-2 sync bytes of the subsequent 7 transport packets, the
PRBS generation will continue, but its output will be disabled, leaving these bytes unrandomized.
Thus, the period of the PRBS sequence will be 1503 bytes.
SYNC1 Rand. data
187 bytesSYNC2
Rand. data
187 bytesSYNC8 SYNC1
Rand. data
187 bytes
Pseudo-random binary sequence period 1503 bytes
Rand. data
187 bytes
Rand. data
187 bytes
Fig. 14.4. Randomized transport stream packets: Sync bytes and randomized data bytes; SYNC1 – non randomized
complemented sync byte; SYNCn – non randomized sync byte
14.1.3 Outer coding
In order to achieve the appropriate level of error protection required for transmission, FEC
based on Reed-Solomon shall be used. The system FEC is designed to improve BER from 10-4 to 10-
10 or 10-11, ensuring quasi error free operation.
The outer coding and interleaving shall be performed on the input packet structure (see
Figure 14.4). Reed-Solomon RS (204,188,T=8) shortened code, derived from the original systematic
RS (255,239,T=8) code, shall be applied to each randomized transport packet (188 byte) of Figure
14.4 to generate an error protected packet (see Figure 14.5). Reed-Solomon coding shall also be
applied to the packet sync byte, either non-inverted or inverted.
Reed-Solomon coding RS(204,188,T=8) adds 16 parity bytes after the transport packets and
becomes 204 bytes long. It can correct up to 8 erroneous bytes in a received word of 204 bytes.
Overhead is low (8%=16/188%).
204 bytes
MPEG-2 transport stream data
187 bytes
16 parity bytes
(RS(204,188,8))SYNC1 or
SYNC n
Fig. 14.5. Reed-Solomon RS(204,188,8) error protected packet
The shortened Reed-Solomon code may be implemented by adding 51 bytes, all set to zero,
before the information bytes at the input of an RS (255,239,T=8) encoder. After the RS coding
procedure these null bytes shall be discarded, leading to a RS code word of N 204 bytes.

190
14.1.4 Outer interleaving
The noisy channel will knock-out more than 8 bytes per package. An outer interleaver improves
that. It can break down any lengthy bursts of errors reaching the outer Reed-Solomon decoder in the
receiver. So, the outer interleaver increases the efficiency of Reed-Solomon coding by spreading
bursts of errors over a longer time.
Following the conceptual scheme of Figure 14.1, convolutional byte-wise interleaving with
depth l=12 is applied to the error protected packets (see Figure 14.5).
The interleaver (see Figure 14.6 and Figure 12.2) may be composed of l=12 branches (lines),
cyclically connected to the input byte-stream by the input switch. Each branch i shall be a First-In,
First-Out (FIFO) shift register, with depth i×s cells where s=17=N/l, N=204. The cells of the FIFO
shall contain 1 byte, and the input and output switches shall be synchronized. For synchronization
purposes, the SYNC bytes and the SYNC bytes shall always be routed in the branch "0" of the
interleaver (corresponding to a null delay).
The deinterleaver (see Figure 14.6 and Figure 12.2) is similar in principle, to the interleaver,
but the branch indices are reversed (i.e. i=0 corresponds to the largest delay). The deinterleaver
synchronization can be carried out by routing the first recognized sync (SYNC or SYNC ) byte in the
"0" branch.
Channel with
modulator and
demodulator
0
1
2
3
11
17 storage elements
17×2
17×3
17×11
Line number
1 byte per
position
Outer interleaver Outer deinterleaver
0
1
2
3
11
17×11 Line number
17×10
17×9
17×8
1 byte per
position
FIFO shift register
Fig.14.6. Conceptual diagram of the outer interleaver and deinterleaver; Interleaving depth l=12; Sync byte always
passes through line 1
The interleaved data bytes shall be composed of error protected packets and shall be delimited
by inverted or non-inverted MPEG-2 sync bytes (preserving the periodicity of 204 bytes). The
interleaved data structure is shown in Figure 14.7).
203 bytes 203 bytes 203 bytesSYNC1 or
SYNC n
SYNC1 or
SYNC n
SYNC1 or
SYNC n
Fig. 14.7. Data structure after outer interleaving
The sequence in which the bytes will be transmitted over the channel after interleaving will be
different from that one in the input. This sequence will be interleaved. It can be verified that if 12l
and 17s , there will be 204l s bytes interposed between two bytes that were initially adjacent to
one another (see Figure 14.8)

191
1
2
2
4
3
6
2
2
4
4
2
2
3
2
2
2
2
0
4
8
2
1
6 ......
2
0
4
2
2
8
1
1
3
2
5
2
2
3
3
2
2
2
1
2
2
0
9
3
7
2
0
5 ......
1
9
3
2
1
7
1
2
2
4
3
6
2
2
4
4
2
2
3
2
2
2
2
0
4
8
2
1
6 ......
2
0
4
2
2
8......
2
2
8
0
2
2
9
2
2
2
5
6
2
2
6
8
2
4
4
8
2
4
6
0
2
4
7
2
......
2
2
7
1
2
2
8
3
2
2
4
7
2
2
5
9
2
4
3
9
2
4
5
1
2
4
6
3
1
8
3
9
1
8
5
1
1
8
6
3
2
2
3
5
2
2
2
3
2
2
1
1
1
8
7
5
2
0
4
3 ......
2
0
3
1
2
0
5
5 3
1
5
2
7
1
8
2
7
1
8
1
5
1
8
0
3
3
9
2
0
7 ......
1
9
5
2
2
8
......
2
2
4
6
2
2
5
8
2
2
7
0
2
2
8
2
2
4
5
0
2
4
3
8
2
4
6
2
2
0
4
2
2
0
5
4
2
0
6
6
2
0
7
8
2
1
3
8 ......
2
1
2
6
2
1
5
0
2
2
3
4
2
2
2
2
2
2
1
0 2
1
4
2
6
2
0
3
0
2
0
1
8
2
0
0
6
3
8
2
0
6 ......
1
9
4
2
1
8
2
2
4
5
2
2
5
7
2
2
6
9
2
2
8
1
2
4
4
9 ......
2
4
3
7
2
4
6
1
2
2
4
5
2
2
5
7......
2
4
3
7
2
4
6
1
2
4
4
9
2
2
8
1
2
2
6
9
Numbers of bytes at the
deinterleaver outputNumbers of bytes
passing channel
Numbers of bytes at the
interleaver input
1 1
1 2
3 3
12 12
Line
number
Line
number
Fig. 14.8. The sequences of bytes at the different points of interleaver / deinterleaver
14.1.5 Inner coding
For inner coding a range of punctured convolutional codes, based on a mother convolutional
code of rate 1/2 with 64 states, are used. Convolutional code is an efficient complement to RS coding
and interleaving, as it corrects other kinds of errors. Inner coding is correcting random error for
satellite and terrestrial only (DVB-S/T). In addition to the mother code of rate 1/2 the system must
allow punctured rates of 2/3, 3/4, 5/6 and 7/8. This will allow selection of the most appropriate level
of error correction for a given service or data rate in either non-hierarchical or hierarchical
transmission mode. If two level hierarchical transmission is used, each of the two parallel channel
encoders can have its own code rate.
However, with code rate 1/2 our useful data capacity is reduced by 50%! Alternative code rates
allow a compromise between protection and data capacity. In the worst case code rate 1/2 should be
used. In the best case code rate 7/8 should be used.
The punctured convolutional code encoder, used in the system, is shown in Figure 14.9.
1 bit
delay
1 bit
delay
1 bit
delay
1 bit
delay
1 bit
delay
XOR
XOR
1 bit
delay
Code rate
controlled
multiplexer
X, Y...
X
Y
Data
input
Fig. 14.9. Punctured convolutional code encoder for inner coding
The operation of the encoder is explained in table 14.1. In this table X and Y refer to the two
outputs of the convolutional encoder.

192
Table 14.1 Puncturing pattern and transmitted sequence after parallel-to-serial conversion
for the possible code rates
Code rates R Unpunctured data from
convolutional encoder
Punctured data
(transmitted sequence)
Code rate 1/2 X1
Y1
X1 Y1
Code rate 2/3 X1 X2
Y1 Y2
X1 Y1 Y2
Code rate 3/4 X1 X2 X3
Y1 Y2 Y3
X1 Y1 Y2 X3
Code rate 5/6 X1 X2 X3 X4 X5
Y1 Y2 Y3 Y4 Y5
X1 Y1 Y2 X3 Y4 X5
Code rate 7/8 X1 X2 X3 X4 X5 X6 X7
Y1 Y2 Y3 Y4 Y5 Y6 Y7
X1 Y1 Y2 Y3 Y4 X5 Y6 X7
14.1.6 Inner interleaving
This section specifies the native inner interleaving processes to be used for 2K and 8K
transmission modes. In order to adapt the bit stream to the OFDM modulation and in order to further
increase the robustness of the system (to reduce the influence of burst errors, to cope with the effect
of frequency-selective channels), after a channel coding, data follow a complex process of inner
interleaving, i.e., data sequence is rearranged again. The inner interleaver is a group of joined blocks
of demultiplexer, bit interleaver and symbol interleaver as shown in Figure 14.10. Both the bit-wise
interleaving and the symbol interleaving processes are block-based. The inner interleaver is specified
in such a way that it provides optimum performance at a given complexity and memory size.
Inner coder
for HP
stream
Inner coder
for LP stream
Inner interleaver
Bit
interleavers
Symbol
interleaver
To the
mapper
DEMUX
DEMUX
Fig. 14.10. Inner coding and interleaving
The schemes and operation of bit interleavers differ subject to the system operation mode
(hierarchical or non-hierarchical, and 2K, 4K or 8K) and modulation used (QPSK, 16-QAM, or 64-
QAM). All these differences are detailed described in [82]. As an example in Figure 14.11 two
schemes of inner interleavers for hierarchical and non-hierarchical 16-QAM transmission modes are
presented. The schemes of other inner interleavers can be found in [82].
I0 Bit
interleaver
I1 Bit
interleaver
I2 Bit
interleaver
I3 Bit
interleaver
DEMUX0 1 2, , ,...x x x Symbol
interleaver
0 1 2, , ,...y y yMapper
0,0 2,0 4,0
convey
, ,
I
y y y
1,0 3,0 5,0
convey
, ,
Q
y y y
0,0 0,1 0,2, , ,...b b b
1,0 1,1 1,2, , ,...b b b
2,0 2,1 2,2, , ,...b b b
3,0 3,1 3,2, , ,...b b b
0,0 0,1, ,...a a
1,0 1,1, ,...a a
2,0 2,1, ,...a a
3,0 3,1, ,...a a

193
a)
I0 Bit
interleaver
DEMUX
I1 Bit
interleaver
I2 Bit
interleaver
I3 Bit
interleaver
DEMUX
0 1 2, , ,...x x x
0 1 2, , ,...x x x
Symbol
interleaver
0 1 2, , ,...y y yMapper
0,0 2,0 4,0
convey
, ,
I
y y y
1,0 3,0 5,0
convey
, ,
Q
y y y
HP
stream
LP
stream
0,0 0,1 0,2, , ,...b b b
1,0 1,1 1,2, , ,...b b b
2,0 2,1 2,2, , ,...b b b
3,0 3,1 3,2, , ,...b b b
0,0 0,1 0,2, , ,...a a a
1,0 1,1 1,2, , ,...a a a
2,0 2,1 2,2, , ,...a a a
3,0 3,1 3,2, , ,...a a a
b)
Fig. 14.11. Mapping of input bits onto output modulation symbols for 16-QAM system; (a) – for non-hierarchical
transmission modes, (b) – for hierarchical transmission modes
14.1.7 Bit-wise interleaving
The first block is demultiplexer. The demultiplexing is defined as a mapping of the input bits
nx onto the output bits ,m nb . The mapping rules for 16-QAM modulation are presented in table 14.2.
Table 14.2 Demultiplexer’s mapping rules for 16-QAM modulation
16-QAM non-hierarchical transmission 16-QAM hierarchical transmission
0x maps to
0,0b ;
0x maps to
0,0b ;
1x maps to
2 ,0b ;
1x maps to
1,0b ;
2x maps to
1,0b ;
0x maps to
2 ,0b ;
3x maps to
3,0b ; 1x maps to
3,0b ;
The mapping rules for other modulations and transmission modes are presented in [82].
In the common case, the input to the inner interleaver, which consists of up to two bit streams
(HP stream and LP stream), is demultiplexed into v sub-streams, where v=2 for QPSK, v=4 for
16QAM, and v=6 for 64QAM. In non-hierarchical mode, the single input stream is demultiplexed
into v sub-streams. In hierarchical mode the high priority stream is demultiplexed into two sub-
streams and the low priority stream is demultiplexed into v-2 sub-streams. This applies in both
uniform and non-uniform QAM modes.
Each sub-stream from the demultiplexer is processed by a separate bit interleaver. There are
therefore up to six interleavers depending on v, labelled I0 to I5. I0 and I1 are used for QPSK, I0 to
I3 for 16-QAM and I0 to I5 for 64-QAM.
Bit interleaving is performed only on the useful data. The block size is the same for each
interleaver, but the interleaving sequence is different in each case. The bit interleaving block size is
126 bits. The block interleaving process is therefore repeated exactly 12 times per OFDM symbol of
useful data in the 2K mode and 48 times per symbol in the 8K mode.
For each bit interleaver, the input bit vector is defined by:
,0 ,1 ,2 ,125( ) ( , , ,... )m m m mm b b b bB ,
where m ranges from 0 to v-1. The elements of the interleaved output vector
,0 ,1 ,2 ,125( ) ( , , ,... )m m m mm a a a aA
are defined by
, ,H ( ), 0,1,2,...,125mm n m na b n ,
where H ( )m n is a permutation function, which is different for each interleaver (see table 14.3).

194
Table 14.3 Permutation functions of bit-wise interleavers
Interleaver Permutation function
I0 0
H ( )n n
I1 1
H ( ) ( 63) mod 126n n
I2 2
H ( ) ( 105) mod 126n n
I3 3
H ( ) ( 42) mod 126n n
I4 4
H ( ) ( 21) mod 126n n
I5 5
H ( ) ( 84) mod 126n n
The outputs of the v bit interleavers are grouped to form the digital data symbols, such that each
symbol of v bits will consist of exactly one bit from each of the v interleavers. Hence, the output
from the bit-wise interleaver is a v bit word ( )nC that has the output of I0 as its most significant bit,
i.e.
0, 1, 2, 1,( ) ( , , ,..., )n n n v nn a a a a C .
14.1.8 Symbol interleaving
The purpose of the symbol interleaver is to map v bit words onto the 1512 (2K mode) or 6048
(8K mode) active carriers per OFDM symbol. The symbol interleaver acts on blocks of 1512 (2K
mode) or 6048 (8K mode) data symbols.
Thus in the 2K mode, 12 groups of 126 data words (12×126=1512 bits) from the bit interleaver
are read sequentially into an auxiliary vector 0 1 2 1511( , , ,..., )y y y y Y . Similarly in the 8K mode, a
vector 0 1 2 6047( , , ,..., )y y y y Y is assembled from 48 groups of 126 data words (48×126=6048 bits).
The elements of the interleaved vector at the symbol interleaver output
max0 1 2 1( , , ,..., )Ny y y y Y
are defined by:
H( )q qy y for even symbols for max0,1,..., 1q N ,
H( )q qy y for odd symbols for max0,1,..., 1q N ,
where max 1512N in the 2K mode and max 6048N in the 8K mode. H( )q is a permutation
function. Its rather complex definition can be found in [82].
The values of Y are used to map the data into the signal constellation, as described in the next
paragraph.
14.1.9 Signal constellations and mapping
The DVB-T system uses Orthogonal Frequency Division Multiplex (OFDM) transmission. All
data carriers in one OFDM frame are modulated using either QPSK, 16-QAM, 64-QAM, non-uniform
16-QAM or non-uniform 64-QAM constellations. The 16-QAM constellations, and the details of the
Gray mapping applied to them, are illustrated in Figure 14.12. Other used constellations can be found
in [82]. The exact proportions of the constellations depend on a parameter α, which can take the three
values 1, 2 or 4, thereby giving rise to the three diagrams in Figures 14.12, a to 14.12, c. The parameter
α is the minimum distance separating two constellation points carrying different HP-bit values
divided by the minimum distance separating any two constellation points. Non-hierarchical
transmission uses the same uniform constellation as the case with α=1 (see Figure 14.12, a).

195
0000
1110
0001
1101
0010
0011
1111 0111
1000
1001
1010
1011
1100 0110
0101
0100
1
1
-1
-1-3 3
3
-3
0, 1, 3, 4,, ,,
q q q qy y y yBit ordering
Q (Im{z}) convey
1, 3,,
q qy y
I (Re{z})
convey
0, 2,,
q qy y
a)
0000
1110
0001
1101
0010
0011
1111 0111
1000
10011010
1011
11000110
0101
0100
2
2
-2
-2-4 4
4
-4
0, 1, 3, 4,, ,,
q q q qy y y yBit ordering
1, 3,,
q qy y
Q (Im{z}) convey
0, 2,,
q qy y
I (Re{z})
convey
b)
0000
1110
0001
1101
0010
0011
1111 0111
1000
10011010
1011
11000110
0101
0100
4
4
-4
-4-6 6
6
-6
0, 1, 3, 4,, ,,
q q q qy y y yBit ordering
1, 3,,
q qy y
Q (Im{z}) convey
0, 2,,
q qy y
I (Re{z})
convey
c)
Fig. 14.12. 16-QAM constellations for DVB-T system; (a) – uniform with α=1 for hierarchical and non-hierarchical
transmission, (b) – non-uniform with α=2 for hierarchical transmission, (c) – non-uniform with α=4 for
hierarchical transmission
In the case of non-hierarchical transmission the data stream at the output of the inner interleaver
consists of v bit words. These are mapped onto a complex number z, according to Figure 14.12, a.
In the case of hierarchical transmission, the data streams are formatted as shown in
Figure 14.11, b, and then the mappings as shown in Figures 14.12, a, b or c are applied, as appropriate.
For hierarchical 16-QAM:
The high priority bits are the 0,qy and 1,qy bits of the inner interleaver output words. The low
priority bits are the 2,qy and 3,qy bits of the inner interleaver output words. The mappings of Figures
12, a, b or c are applied, as appropriate.
For example, the top left constellation point, corresponding to 1000 represents 0, 1qy ,
1, 2, 3, 0q q qy y y . If this constellation is decoded as if it were QPSK, the high priority bits, 0,qy ,
1,qy will be deduced. To decode the low priority bits, the full constellation shall be examined and the
appropriate bits 2,qy , 3,qy extracted from 0,qy , 1,qy , 2,qy , 3,qy .

196
14.1.10 OFDM frame structure
The transmitted signal is organized in frames. Each frame has a duration of FT , and consists of
68 OFDM symbols. Four frames constitute one super-frame. Each symbol is constituted by a set of
K=6817 carriers in the 8K mode and K=1705 carriers in the 2K mode and transmitted with a duration
ST . It is composed of two parts: a useful part with duration UT and a guard interval with a duration
. The guard interval consists in a cyclic continuation of the useful part UT , and is inserted before
it. Four values of guard intervals may be used according to table 14.4.
The symbols in an OFDM frame are numbered from 0 to 67. All symbols contain data and
reference information. Since the OFDM signal comprises many separately-modulated carriers, each
symbol can in turn be considered to be divided into cells, each corresponding to the modulation
carried on one carrier during one symbol. In addition to the transmitted data an OFDM frame contains
reference signals:
Scattered pilots;
Continual pilots;
Transmission Parameter Signaling (TPS) pilots.
An illustration of the DVB-T frame structure of 68 OFDM symbols per frame is given in Figure
14.13.
Time
(Symbol)
0s
1s
2s
3s
67s
66s
Frequency (Carrier)
2c1c0c 3c 4c 1704 or 6816c
Scattered pilot Continual pilot TPS pilot Data1704c if 2K
6816c if 8K
Fig. 14.13. Transmission frame for the DVB-T signal
The scattered and continual pilot cells within the OFDM frame are modulated with reference
information whose transmitted value is known to the receiver and can be used for frame
synchronization, frequency synchronization, time synchronization, channel estimation, transmission
mode identification and can also be used to follow the phase noise. These pilots are transmitted with
an amplitude which is 1/0,75 larger than the amplitude of the other carriers in order to be particularly
robust against transmission errors. TPS pilots inform the receiver about the actual operating
parameters. The TPS carries are modulated by means of a differential binary phase shift keying
(DBPSK). Thus, one bit per carrier can be transmitted. Consequently, one OFDM frame contains a
TPS block of 68 bits, namely, 1 initialization bit, 16 synchronization bits, 37 information bits, and 14
redundancy bits for error protection [82]. In order to make the TPS data more robust against
frequency-selective channel distortions it is transmitted totally redundantly on 17 carrier frequencies
for the 2K mode and on 68 carrier frequencies for the 8K mode.
Each continual pilot coincides with a scattered pilot every fourth symbol; the number of useful
data carriers is constant from symbol to symbol: 1512 useful carriers in 2K mode and 6048 useful
carriers in 8K mode. The value of the scattered or continual pilot information is derived from a Pseudo

197
Random Binary Sequence (PRBS) which is a series of values, one for each of the transmitted carriers.
Reference information, taken from the reference sequence, is transmitted in scattered pilot cells in
every symbol.
In addition to the scattered pilots, 177 continual pilots in the 8K mode and 45 in the 2K mode,
are inserted, where "continual" means that they occur on all symbols. All continual pilots are
modulated according to the reference sequence (PRBS).
The polynomial for the Pseudo Random Binary Sequence (PRBS) generator is 17 2 1X X .
The PRBS is initialized so that the first output bit from the PRBS coincides with the first active
carrier. A new value is generated by the PRBS on every used carrier (whether or not it is a pilot).
The TPS carriers are used for the purpose of signaling parameters related to the transmission
scheme, i.e. to channel coding and modulation. The TPS is transmitted in parallel on 17 TPS carriers
for the 2K mode and on 68 carriers for the 8K mode. Every TPS carrier in the same symbol conveys
the same differentially encoded information bit.
The TPS carriers convey information on:
Modulation including the parameter α value of the QAM constellation pattern;
Hierarchy information;
Guard interval;
Inner code rates;
Transmission mode (2K or 8K);
Frame number in a super-frame;
Cell identification.
The TPS is defined over 68 consecutive OFDM symbols, referred to as one OFDM frame. Four
consecutive frames correspond to one OFDM super-frame. The reference sequence corresponding to
the TPS carriers of the first symbol of each OFDM frame are used to initialize the TPS modulation
on each TPS carrier. Each OFDM symbol conveys one TPS bit. Each TPS block (corresponding to
one OFDM frame) contains 68 bits, defined as follows:
1 initialization bit;
16 synchronization bits;
37 information bits;
14 redundancy bits for TPS error protection.
Of the 37 information bits, 31 are used. The remaining 6 bits shall be set to zero.
More details about TPS transmission format can be found in [82].
14.1.11 Main parameters of DVB-T system
Finally we present table 14.4 summarizing the main parameters of DVB-T for European
channels of 7 and 8 MHz [76, 82].
Table 14.4 Main parameters of the DVB-T terrestrial system
Parameter 8K/8 MHz 8K/7 MHz 2K/8 MHz 2K/7 MHz
Total number of carriers 6817 1705
Useful carriers (data) 6048 1512
Scattered pilot carriers 524 131
Continual pilot carriers 177 45
Signaling carriers 68 17
Useful symbol duration (TU) 896 µs 1024 µs 224 µs 256 µs
Carrier spacing (1/TU) 1116,07 Hz 976,65 Hz 4464,28 Hz 3906,25 Hz
Distance between extreme carriers 7,61 MHz 6,66 MHz 7,61 MHz 6,66 MHz
Relative guard interval (Δ/TU) 1/4, 1/8, 1/16 or 1/32
Individual carrier modulation QPSK, 16-QAM, 64-QAM
Hierarchical modes α=1 or α=2 or α=4

198
14.2 DVB-C system
14.2.1 Functional block diagram of the system
The DVB-C (Cable) system (see Figure 14.14) is defined as the functional block of equipment
performing the adaptation of the baseband TV signals to the cable channel characteristics [88].
From RF
Cable
ChannelQAM
demodulator
I
Q
Matched
Filter &
Equalizer
Differential
Decoder
Symbol to
Byte
Mapper
Covol.
Deinterleaver
(I=12)
RS
Decoder
(204,188,8)
Baseband
Physical
Interface
Datam 8m 8 8 8
Clock
Carrier & Clock & Sync Recovery
Cable Integrated Receiver Decoder
Sinc1 Inverter
&
Derandomizer
Front-End
& ADC
RS Coder
(204,188,8)
Convol.
Interleaver
(I=12)
Byte to
m-tuple
Converter
Mapper &
Pulse
Shaping
I
Q
To RF
Cable
ChannelBaseband
Physical
Interface
Differential
Encoder
QAM
Modulator
8 8 8 m m8
Data
MPEG-2 TS
Clo
ck
Baseband Interface to:
MPEG-2 TS sources,
Contribution links,
Remultiplexers, etc.
Clock & Sync Generator
Cable Channel Adapter
Sinc1
Inverter &
Randomizer
DAC &
Front-End
Fig. 14.14. Conceptual block diagram of elements at the cable head-end and receiver
In the cable head-end, the following TV baseband signal sources can be considered:
Satellite signals;
Contribution links;
Local program sources.
The processes in the following text will be described in an order as shown in Figure 14.14.
14.2.2 System blocks and their functions
Baseband interfacing
This unit shall adapt the data structure to the format of the signal source. The framing structure
shall be in accordance with MPEG-2 transport stream including sync bytes.
Sync 1 inversion and scrambling (randomization)
This unit shall invert the Sync 1 byte according to the MPEG-2 framing structure, and
randomizes the data stream for spectrum shaping purposes. It is the same as in DVB-T system.
Reed-Solomon (RS) coder
This unit shall apply a shortened Reed-Solomon (RS) code to each randomized transport packet
to generate an error-protected packet. This code shall also be applied to the Sync byte itself. The unit
is identical to the outer coder used in DVB-T system.
Convolutional interleaver
This unit shall perform a depth l=12 convolutional interleaving of the error-protected packets.
The periodicity of the sync bytes shall remain unchanged. This block is the same as the outer
interleaver in DVB-T system.
Byte to m-tuple conversion
This unit must perform a conversion of the bytes generated by the interleaver into QAM
symbols. In each case, the MSB of symbol X shall be taken from the MSB of byte V.
Correspondingly, the next significant bit of the symbol shall be taken from the next significant bit of
the byte. For the case of 2B-QAM modulation, the process shall map k bytes into n symbols, such
that: 8k=n×B.

199
The process is illustrated for the case of 64-QAM (where B=6, k=3 and n=4) in Figure 14.15.
Bytes from
interleaver
output
b7 b6 b5 b4 b3 b2 b1 b0 b7 b6 b5 b4 b3 b2 b1 b0 b7 b6 b5 b4 b3 b2 b1 b0
6-bit symbols to
differential
encoder
b5 b4 b3 b2 b1 b0 b5 b4 b3 b2 b1 b0 b5 b4 b3 b2 b1 b0 b5 b4 b3 b2 b1 b0
Symbol X Symbol X+1 Symbol X+2 Symbol X+3
Byte V Byte V+1 Byte V+2
MSB LSB
Fig. 14.15. Byte to 6-bit symbol conversion for 64-QAM modulation
Differential encoding
In order to get a / 2 rotation-invariant QAM constellation, this unit shall apply a differential
encoding of the two Most Significant Bits (MSBs) of each symbol. The MSBs Ik and Qk of the
consecutive symbols A and B are differentially coded at the transmitter end to enable decoding
independently of the quadrant's absolute position. This is necessary because the phase information is
lost due to carrier suppression during modulation.
Figure 14.16 gives an example of implementation of byte to symbol conversion and the
differential encoding.
Bytes from
convolutional
interleaver
Bytes to
m-tuples
converterDifferential
encoder
MapperQk
Ik
q bits (bq-1...b0)
Bk=bq
Ak=MSB
I
Q
q=2 for 16-QAM q=3 for 32- QAM q=4 for 64- QAM
Fig. 14.16. Example implementation of the byte to m-tuple conversion and the differential encoding of the two MSBs
The differential encoding of the two MSBs shall be given by the following Boolean expressions:
1 1( ) ( ) ( ) ( )k k k k k k k k kI A B A I A B A Q ,
1 1( ) ( ) ( ) ( )k k k k k k k k kQ A B B Q A B B I ,
where the above Boolean expression "⊕ " denotes the XOR function, "+" denotes the logical OR
function, " " denotes the logical AND function and the overbar denotes inversion.
The MSBs Ik and Qk are buffered during one symbol clock after differential coding. The original
position of the quadrant is obtained from the comparison of Ik and Ik-1 and Qk and Qk-1. This is
illustrated in table 14.5.
Table 14.5 Truth table for differential coding
Inputs Outputs Rotation
Ak Bk Ik Qk
0 0 Ik-1 Qk-1 0
0 1 1k
Q
1k
I
90
1 0 Qk-1 1k
I
90
1 1 1k
I
1k
Q
180
Modulation
The modulation of the DVB-C system shall be Quadrature Amplitude Modulation (QAM) with
16, 32, 64, 128 or 256 points in the constellation diagram. The mapping is not identical with the

200
correspondent mapping of DVB-T. The constellation diagram for DVB-C 16-QAM modulation is
given in Figure 14.17.
0011
1110
0001
1101
0010
0000
1100 0100
1011
1010
1001
1000
1111 0101
0110
0111
1
1
-1
-1-3 3
3
-3
Q
I
00k kI Q
01k kI Q 11k kI Q
10k kI Q
Fig. 14.17. The DVB-C constellation diagram for 16-QAM
Other DVB-C constellation diagrams can be found in [88]. These constellation diagrams
represent the signal transmitted in the cable system. As shown in Figure 14.17, the constellation points
in quadrant 1 shall be converted to quadrants 2, 3 and 4 by changing the two MSB (i.e. Ik and Qk) and
by rotating the q LSBs according to the following rule given in Table 14.6.
Table 14.6 Conversion of constellation points of quadrant 1
to other quadrants of the constellation diagram
Quadrant MSBs LSBs rotation
1 00
2 10 +π/2
3 11 +π
4 01 +3π/2
Baseband pulse shaping
This unit performs mapping from differentially encoded m-tuples to I and Q signals and a
square-root raised cosine filtering of the I and Q signals prior to QAM modulation. The roll-off factor
is chosen to be equal to 0,15. The QAM signal is filtered with a square-root raised-cosine shaped
filter, in order to remove mutual signal interference at the receiving side.
DAC and front-end
The digital signal is transformed into an analog signal, with a digital-to-analog converter
(DAC), and then modulated to radio frequency by the RF front-end.
The receiving set-up box It adopts techniques which are dual to those ones used in the transmission:
Front-end and ADC: the analog RF signal is converted to baseband and transformed into a
digital signal, using an analog-to-digital converter (ADC);
QAM demodulation;
Matched filtering and equalization;
Differential decoding;
Symbol to byte mapping
Convolutional deinterleaving;
Reed-Solomon decoding;
Derandomization;
MPEG-2 demultiplexing and source decoding
Programmable Transport Stream
Cable bit rates
With a roll-off factor of 0,15, the theoretical maximum symbol rate in an 8 MHz channel is
about 6,96 MBaud.

201
Table 14.7 gives examples of the wide range of possible cable bit rates and occupied bandwidths
considering 16-QAM, 32-QAM, 64-QAM, 128-QAM and 256-QAM constellations.
Table 14.7 Available bit rates (Mbit/s) for DVB-C system [88]
Modulation Bandwidth, MHz
2 4 6 8 10
16-QAM 6,41 12,82 19,23 25,64 32,05
32-QAM 8,01 16,03 24,04 32,05 40,07
64-QAM 9,62 19,23 28,85 38,47 48,08
128-QAM 11,22 22,44 33,66 44,88 56,10
256-QAM 12,82 25,64 38,47 51,29 64,11
The commonly used values in cable networks are 64-QAM or 256-QAM constellations and
6 MHz or 8 MHz channel bandwidths.
14.3 DVB-S system
14.3.1 Functional block diagram of the system
Direct To Home (DTH) services via satellite are particularly affected by power limitations,
therefore, ruggedness of the system against noise and interference, shall be the main design
objective, rather than spectrum efficiency. To achieve a very high power efficiency without
excessively penalizing the spectrum efficiency, the system shall use QPSK modulation and the
concatenation of convolutional and RS codes. The convolutional code is able to be configured
flexibly, allowing the optimization of the system performance for a given satellite transponder
bandwidth.
The system is defined as the functional block of equipment performing the adaptation of the
baseband TV signals, from the output of the MPEG-2 transport multiplexer to the satellite channel
characteristics. The transmission part of the system (see Figure 14.18) consists of blocks
implementing the following functions [89]:
MPEG-2 transport stream adaptation and randomization for energy dispersal;
Reed-Solomon coding (outer coding);
Convolutional interleaving (outer interleaving);
Punctured convolutional coding (inner coding);
Baseband shaping for modulation;
Modulation.
The blocks of reception part (see Figure 14.18) implement inverse functions.

202
From RF
Satellite
Channel
1
2
n
QPSK
Modulator
MPEG encoders and
multiplexers
...
Bit stream
adaptation
Energy
dispersal
Outer coder
RS(204,
188, 8)
Outer
Interleaver
Baseband
shaping
Inner
Coder &
Mapper
Video
encoder
Audio
encoder
Data Ele
men
tary
str
eam
mu
ltip
lex
er
Tra
nsp
ort
str
eam
mu
ltip
lex
er
DAC &
Front-End
Clock & Sync Generator
18
8 b
yte
s
seg
men
ts
To the RF
Satellite
Channel
Satellite Channel Adapter
QPSK
demodulator
I
Q
Matched
Filter
Inner
DecoderSync
decoder
Covol.
Deinterleaver
(I=12)
RS
Decoder
(204,188,8)
Baseband
Physical
Interface
Datam 8m 8 8 8
Clock
Carrier & Clock & Sync Recovery
Satellite Receiver Decoder
Sinc1 Inverter
&
Derandomizer
Front-End
& ADC
Fig. 14.18. Functional block diagram of the DVB-S system
14.3.2 System blocks and their functions
The blocks performing bit stream adaptation and randomization for energy dispersal, outer
Reed-Solomon coding, outer convolutional interleaving and inner punctured convolutional
coding are identical to those used in DVB-T system.
Baseband shaping and modulation
The system employ conventional Gray-coded QPSK modulation with absolute mapping (no
differential coding). Bit mapping in the signal space as given on Figure 14.19 is used. Prior to
modulation, the I and Q signals are square-root raised cosine filtered. The roll-off factor α is equal to
0,35.
I=0
Q=0
Q
I
I=1
Q=0
I=1
Q=1I=0
Q=1
Fig. 14.19. QPSK constellation used in DVB-S system
Due to the similarity of the transmitter and receiver block diagrams (see Figure 14.18), only the
latter will be described below.
Front-End and ADC and QPSK demodulator: these units perform the conversion of the
analog RF signal to baseband and transformation into a digital signal, using an analog-to-digital
converter (ADC), also the quadrature coherent demodulation, providing I and Q information to the
inner decoder.
Matched filter: this unit performs the complementary pulse shaping filtering of square-root
raised cosine type according to the roll-off. The use of a Finite Impulse Response (FIR) digital filter
could provide equalization of the channel linear distortions in the receiver.
Carrier/clock recovery unit: this device recovers the demodulator synchronization.

203
Inner decoder: this unit performs first level error protection decoding. It operates at an input
BER in the order of between 10-1 and 10-2 (depending on the adopted code rate), and produces an
output BER of about 2×10-4 or lower. This output BER corresponds to quasi-error-free service after
outer code correction. This unit is in a position to try each of the code rates and puncturing
configurations until lock is acquired. Furthermore, it is in a position to resolve π/2 demodulation
phase ambiguity.
Sync byte decoder: by decoding the MPEG-2 sync bytes, this decoder provides
synchronization information for the de-interleaving. It is also in a position to recover π ambiguity of
QPSK demodulator (not detectable by the Viterbi decoder).
Convolutional de-interleaver: this device allows the error bursts at the output of the inner
decoder to be randomized on a byte basis in order to improve the burst error correction capability of
the outer decoder.
Outer decoder: this unit provides second level error protection. It is in a position to provide
quasi-error-free output (i.e. BER of about 10-10 to 10-11) in the presence of input error bursts at a BER
of about 7×10-4 or better with infinite byte interleaving. In the case of interleaving depth I=12,
BER=2×10-4 is assumed for quasi-error-free.
Energy dispersal removal: this unit recovers the user data by removing the randomizing
pattern used for energy dispersal purposes and changes the inverted sync byte to its normal MPEG-2
sync byte value.
Baseband physical interface: this unit adapts the data structure to the format and protocol
required by the external interface.

204
REFERENCES 1. Y. Wu, S. Hirakawa, U. H. Reimers, J. hitaker. “Overview of digital television
development worldwide”. Proceedings of the IEEE, Vol. 94, No. 1, January 2006.
2. Broadcasting pioneers: The many innovators behind television history. [Online]. Available:
http://inventors.about.com/library/in-ventors/bltelevision.htm.
3. Television history – The first 75 years. [Online]. Available: http://www.tvhistory.tv/.
4. A six-megacycle compatible high-definition color television system.. RCA Rev., Vol. 10,
pp. 504–522, Dec. 1949.
5. Report and order of Federal Communications Commission. Washington, DC, FCC Doc. 53-
1663, Dec. 17, 1953.
6. D. H. Pritchard and J. J. Gibson. Television transmission standards. In Standard Handbook
of Broadcast Engineering, J. C. Whitaker, Ed. New York: McGraw-Hill, pp. 3.9–3.33, 2005.
7. Y. Ninomiya. The Japanese scene. IEEE Spectrum, Vol. 32, No. 4, pp. 54–57, Apr. 1995.
8. B. Fox. The digital dawn in Europe [HDTV]. IEEE Spectrum, Vol. 32, No. 4, pp. 50–53,
Apr. 1995.
9. R. J. G. Ellis. The PALplus Story. Manchester, U.K.: Architects’ Publishing Partnership
Ltd., 1997.
10. M. A. Isnardi, T. Smith, B. J. Roeder. Decoding issues in the ACTV system. IEEE Trans.
Consum. Electron., Vol. 34, No. 1, pp. 111–120, Feb. 1988.
11. U. Reimers. DVB – The Family of International Standards for Digital Video Broadcasting.
Springer, Berlin, 2004.
12. M. D. Fairchild. Color Appearance Models. Sec. Ed. John Wiley & Sons Ltd, 2005.
13. D. Briggs. The dimensions of color. [Online]. Available:
http://www.huevaluechroma.com/index.php.
14. Color Models. [Online]. Available:
http://cs.brown.edu/courses/cs092/VA10/HTML/ColorModels.html.
15. CIE 1931 color space. [Online]. Available:
http://en.wikipedia.org/wiki/CIE_1931_color_space.
16. Color Models. [Online]. Available: http://www.sketchpad.net/basics4.htm.
17. Color Models. [Online]. Available:
https://software.intel.com/sites/products/documentation/hpc/ipp/ippi/ippi_ch6/ch6_color_
models.html.
18. ITU-R Recommendation BT.709: Basic Parameter Values for the HDTV Standard for the
Studio and International Programme Exchange [formerly CCIR Rec.709]. ITU, Geneva,
Switzerland, 2005.
19. K. Jack. Video Demystified: a Handbook for the Digital Engineer. LLH Technology
Publishing, 3rd Edition, 2001.
20. ITU-R Recommendation BT.601: Studio encoding parameters of digital television for
standard 4:3 and wide-screen 16:9 aspect ratios, [formerly CCIR Rec.601]. ITU, Geneva,
Switzerland, 2011.
21. H. S. Malvar, G. J. Sullivan. Transform, Scaling & Color Space Impact of Professional
Extensions, ISO/IEC JTC/SC29/WG11 and ITU-T SG16 Q6 Document JVT-H031, Geneva,
May 2003.
22. Color Theory. [Online]. Available: http://www.colormepretty.co/color-theory/.
23. James Clerk Maxwell (1831 - 1879). [Online]. Available:
http://faculty.wcas.northwestern.edu/~infocom/Ideas/maxwell.html.
24. D. Zawischa. Introduction to color science. [Online]. Available: https://www.itp.uni-
hannover.de/~zawischa/ITP/introcol.html.
25. Human Perception of Sound. [Online]. Available: http://zone.ni.com/reference/en-
XX/help/372416B-01/svtconcepts/human_perception_sound/.

205
26. Hearing and Perception. [Online]. Available:
http://artsites.ucsc.edu/ems/music/tech_background/te-03/teces_03.html.
27. Engineering Acoustics/The Human Ear and Sound Perception. [Online]. Available:
http://en.wikibooks.org/wiki/Engineering_Acoustics/The_Human_Ear_and_Sound_Percep
tion.
28. E. Zwicker. Psychoakustik. Springer, Berlin, 1982, ISBN 3-540-11401-7.
29. Steven W. Smith. The Scientist and Engineer's Guide to Digital Signal Processing.
California Technical Publishing, 1997.
30. The mel frequency scale and coefficients. [Online]. Available:
http://kom.aau.dk/group/04gr742/pdf/MFCC_worksheet.pdf.
31. L R. Rabiner, R W. Schafer. Digital Processing of Speech Signals. Prentice Hall, London,
1978.
32. K. Fellbaum, J. Richter. Human Speech Production Using Interactive Modules and the
Internet - a Tutorial for the Virtual University. [Online]. Available:
https://www2.spsc.tugraz.at/add_material/courses/scl/vocoder/.
33. P. Vary, U. Heute, W. Hess. Digitale Sprachsignalverarbeitung. Teubner, Stuttgart, 1998.
34. A. E. Rosenberg. Effect of Glottal Pulse Shape on the Quality of Natural Vowels.
J. Acoust. Soc. Am., Vol. 49, No. 2, pp. 583-590, Feb. 1971.
35. L. W. Couch, II. Digital and Analog Communication Systems. Pearson Education, London,
2007.
36. I. A. Glover, P. M. Grant. Digital Communications. Prentice Hall, London, 1998.
37. H. Taub, D. L. Schilling. Principles of Communication Systems. McGraw-Hill, London,
1986.
38. A. B. Carlson. Communication Systems. McGraw-Hill, London, 1987.
39. Natural Binary Codes and Gray Codes. [Online]. Available:
http://www.gaussianwaves.com/2012/10/natural-binary-codes-and-gray-codes/.
40. ITU-R Recommendation BT.656: Interfaces for digital component video signals in 525-line
and 625-line television systems operating at the 4:2:2 level of Recommendation ITU-R
BT.601 (Part A) [formerly CCIR Rec.656]. ITU, Geneva, Switzerland, 2007.
41. J. Arnold, M. Frater, M. Pickering. Digital television: Technology and Standards.
John Wiley&Sons, New Jersey, 2007.
42. T. Wiegand, X. Zhang, and B. Girod. Long-Term Motion-Compensated Prediction. IEEE
Trans. on Circuits and Systems for Video Technology, Feb. 1999.
43. T. Wiegand, N. Färber, K. Stuhlmüller, and B. Girod. Error-Resilient Video Transmission
using Long-Term Memory Motion-compensated Prediction. IEEE Journal on Selected Areas
in Communications, June 2000.
44. K. Rao, P. Yip. Discrete Cosine Transform: Algorithms, Advantages, Applications. Boston,
Academic Press, 1990.
45. J. D. Markel, A. H. Gray. Linear Prediction of Speech. Springer Verlag, Berlin, 1976.
46. B. Goldand, N. Morgan. Speech and Audio Signal Processing: Processing and Perception of
Speech and Music. Wiley&Sons, Chichester, 2000.
47. M. D. Paez, T. H. Glisson. Minimum Mean Squared Error Quantization in Speech. IEEE
Trans. Comm., Vol. Com-20, pp.225-230, April, 1972.
48. Adaptive Quantization. [Online]. Available:
http://www.ece.ucsb.edu/Faculty/Rabiner/ece259/digital%20speech%20processing%20cou
rse/lectures_new/Lecture%2016_winter_2012_6tp.pdf.
49. P. Noll. Adaptive Quantizing in Speech Coding Systems. Proc. 1974 Zurich Seminar on
Digital Communications. Zurich, March, 1974.
50. N. S. Jayant. Adaptive Quantization with a One Word Memory. Bell System Tech. J., pp.
1119-1144, September, 1973.

206
51. R. A. McDonald. Signal to Noise and Idle Channel Performance of DPCM System –
Particular Applications to Voice Signals. Bell System Tech. J., Vol. 45, No. 7, pp. 1123-
1151, September, 1996.
52. R. M. Gray. A classical tutorial on vector quantization Vector quantization. IEEE ASSP
Mag., Vol.1, pp. 4-29, April, 2004.
53. H. B. Kekre, V. Kulkarni. Performance Comparison of Automatic Speaker Recognition
using Vector Quantization by LBG KFCG and KMCG. International Journal of Computer
Science and Security, Vol 4: Issue 6,pp. 571-579.
54. Y. Linde, A. Buzo and R. M. Gray. An algorithm for vector quantizer design. IEEE Trans.
Commun., Vol.28, pp.84-95, Jan. 2003.
55. A. Gersho, R. M. Gray. Vector quantization and data compression. Kluneer, Boston, 1992.
56. C. Q. Chen, S. N. Koh, I. Y. Soon. Fast codebook search algorithm for unconstrained vector
quantization. IEE Proc. Vis. Image Signal Process, Vol. 145, No. 2, April 1998.
57. K. Brandenburg, G. Stoll. ISO-MPEG-1 Audio: a generic standard for coding of high-quality
digital audio. Journal of the Audio Engineering Society, Vol. 42(10), pp.780-792, October
1994.
58. ISO/IEC JTC1/SC29/WG11. Information technology - Coding of moving pictures and
associated audio for digital storage media up to about 1,5 Mb/s. IS 11172 (Part3, Audio),
1992.
59. ISO/IEC JTC1/SC29/WG11. Information technology - Generic coding of moving pictures
and associated audio information. IS 13818 (Part 3, Audio), 1994.
60. ISO/IEC JTC1/SC29/WG11. Information Technology - Generic coding of moving pictures
and associated audio information. IS 13818 (Part 7, Advanced audio coding), 1997.
61. ISO/IEC JTC1/SC29/WG11. Information Technology - Coding of audiovisual objects.
ISO/IEC.D 4496 (Part 3, Audio), 1999.
62. K. Brandenburg, M. Bosi. Overview of MPEG audio: Current and future standards for low-
bit-rate audio coding. J. Audio Eng. Soc., Vol. 45(1/2), pp. 4-19, 1997.
63. C. M. Liu, W. W. Chang. Handbook of Multimedia Communication. Academic Press, New York,
2000. 64. D. Pan. A tutorial on MPEG/Audio compression. IEEE Multimedia Magazine, Vol. 2(2), pp.
60-74, 1995.
65. T. Görne. Tontechnik. Fachbuchverlag, Leipzig, München, 2006.
66. The story of MP3. Fraunhofer Institute for Integrated Circuits IIS. [Online]. Available:
http://www.mp3-history.com/en/the_story_of_mp3.html.
67. M. Bosi, K. Brandenburg, Sch. Quackenbush and others. ISO/IEC MPEG-2 Advanced
Audio Coding. Proc. of the 101st AES-Convention, 1996.
68. T. Saramaki. A generalized class of cosine-modulated filter banks. Proceedings of First
International Workshop on Transforms and Filter Banks, Tampere, Finland, pp. 336-365,
1998.
69. ITU-R Recommendation G.722: 7 kHz audio-coding within 64 kbit/s. ITU, Geneva,
Switzerland, 2012.
70. K. Brandenburg. MP3 and AAC explained. Proceedings of the AES 17th International
Conference on High Quality Audio Coding, 1999.
71. ISO/IEC 13818-1. Information technology - Generic coding of moving pictures and
associated audio information: Systems. 2007.
72. ISO/IEC 13818-2. Information technology - Generic Coding of Moving Pictures and
Associated Audio Information: Video. 2007.
73. Handbook of Image and Video Processing. Edited by A. Bovik. Elsevier Inc., 2005.
74. The Telecommunications Handbook. Edited by K. Terplan, P. A. Morreale. CRC Press,
2000.

207
75. Multimedia Communication Networks. Chapter 7. MPEG-2 System layer. [Online].
Available: https://www.uic.edu/classes/ece/ece434/chapter_file/chapter7.htm.
76. H. Benoit. Digital Television. Satellite, Cable, Terestrial, IPTV, Mobile TV inthe DVB
Framework. Elsvier Inc., 2008.
77. T. Ho. Digital Video Broadcasting Conditional Access Architecture. A Report Prepared for
CS265-Section 2 [Online]. Available:
http://www.cs.sjsu.edu/~stamp/CS265/projects/papers/dvbca.pdf.
78. M. Carter. Pay TV Piracy: Lessons Learned. Digital Rights Management Workshop, 2000.
[Online]. Available: http://www.eurubits.de/drm/drm_2000/slides/carter.pdf.
79. ETSI. Digital Video Broadcasting (DVB); Support for Use of Scrambling and Conditional
Access (CA) within Digital Broadcasting Systems. ETR 289, 1996.
80. M. G. Kuhn. The New European Digital Video Broadcast (DVB) Standard. [Online].
Available: http://www.cl.cam.ac.uk/~mgk25/dvb.txt.
81. EN 301 192. Specifications for Data Broadcasting. European Telecommunications
Standards Institute (ETSI), 2004.
82. ETSI EN 300 744. V1.5.1. Digital Video Broadcasting (DVB); Framing structure, channel
coding and modulation for digital terrestrial television. European Telecommunications
Standards Institute (ETSI), 2004.
83. S. Gravano. Introduction to Error Control Codes. Oxford University Press, New York, 2001.
84. W. W. Peterson, E. J. Weldon. Error Correcting Codes. Cambridge, MA, The MIT Press,
1972.
85. Coding and decoding with Convolutional Codes. Ch. Langton, Editor. [Online]. Available:
www.complextoreal.com.
86. R. W. Hamming. Error Detecting and Error Correcting Codes. Bell System Techn. J., Vol.
29, pp. 147-160, April 1950.
87. V. K. Bhargava. Forward Error Corection Schemes for Digital Communications. IEEE
Communications Magazine, Vol. 21, pp. 11-19, January 1983.
88. ETSI EN 300 429 V1.2.1. Digital Video Broadcasting (DVB); Framing structure, channel
coding and modulation for cable systems. European Telecommunications Standards Institute
(ETSI), 1998.
89. ETSI EN 302 307, V1.2.1. Digital Video Broadcasting (DVB); Framing structure, channel
coding and modulation for 11/12 GHz satellite services. European Telecommunications
Standards Institute (ETSI), 1997.
90. ETSI EN 300 421 V1.1.2. Digital Video Broadcasting (DVB); Second generation framing
structure, channel coding and modulation systems for Broadcasting, Interactive Services,
News Gathering and other broadband satellite applications (DVB-S2). European
Telecommunications Standards Institute (ETSI), 2009.
91. P. Shelswell. The COFDM modulation system: the heart of digital audio broadcasting.
Electronics & Communication Engineering Journal, pp. 127-136, June 1995.
92. J. H. Stott. The how and why of COFDM. EBU Technical Review, pp. 1-14, Winter 1998.
93. S. L. Linfoot, R. S. Sherratt. A Study of COFDM in a Terrestrial Multipath Environment.
Eurocomm 2000. Information Systems for Enhanced Public Safety and Security.
IEEE/AFCEA, pp. 388-391, 2000.