transportation research part b - purdue university
TRANSCRIPT

Transportation Research Part B 102 (2017) 124–141
Contents lists available at ScienceDirect
Transportation Research Part B
journal homepage: www.elsevier.com/locate/trb
Air traffic flow management under uncertainty using
chance-constrained optimization
J. Chen
a , ∗, L. Chen
b , D. Sun
a
a School of Aeronautics and Astronautics, Purdue University, West Lafayette, Indiana 47907, USA b Department of MIS, Operations Management and Decision Sciences, University of Dayton, Dayton, Ohio 45469, USA
a r t i c l e i n f o
Article history:
Received 8 September 2016
Revised 27 March 2017
Accepted 26 May 2017
Available online 30 May 2017
Keywords:
Air traffic flow management
Chance-constrained optimization
Bernstein polynomial
a b s t r a c t
In order to efficiently balance traffic demand and capacity, optimization of Air Traffic
Flow Management (ATFM) relies on accurate predictions of future capacity states. How-
ever, these predictions are inherently uncertain due to factors, such as weather. This pa-
per presents a novel computationally efficient algorithm to address uncertainty in ATFM
by using a chance-constrained optimization method. First, a chance-constrained model is
developed based on a previous deterministic Integer Programming optimization model of
ATFM to include probabilistic sector capacity constraints. Then, to efficiently solve such
a large-scale chance-constrained optimization problem, a polynomial approximation-based
approach is applied. The approximation is based on the numerical properties of the Bern-
stein polynomial, which is capable of effectively controlling the approximation error for
both the function value and gradient. Thus, a first-order algorithm is adopted to obtain a
satisfactory solution, which is expected to be optimal. Numerical results are reported in
order to evaluate the polynomial approximation-based approach by comparing it with the
brute-force method. Moreover, since there are massive independent approximation pro-
cesses in the polynomial approximation-based approach, a distributed computing frame-
work is designed to carry out the computation for this method. This chance-constrained
optimization method and its computation platform are potentially helpful in their applica-
tion to several other domains in air transportation, such as airport surface operations and
airline management under uncertainties.
© 2017 Elsevier Ltd. All rights reserved.
1. Introduction
The goal of Air Traffic Flow Management (ATFM) is to allocate airspace resources such that the balance between capacity
and demand is maintained, subject to both en-route and airport capacity constraints. Airport and airspace sector capacities
are greatly influenced by weather conditions such as fog, snow, wind and reduced visibility. These severe weather conditions
may reduce both airspace and airport capacity such that the demand and supply situation of ATFM is made worse. According
to Sridhar et al. (2008) , severe weather has been identified as the most important causal factor for traffic delays in the
United States. Moreover, the weather forecast brings uncertainty into capacities, which also poses a significant challenge to
ATFM. Strategic traffic flow management decisions made under uncertainty can cause nationwide severe congestion in the
∗ Corresponding author.
E-mail addresses: [email protected] (J. Chen), [email protected] (L. Chen), [email protected] (D. Sun).
http://dx.doi.org/10.1016/j.trb.2017.05.014
0191-2615/© 2017 Elsevier Ltd. All rights reserved.

J. Chen et al. / Transportation Research Part B 102 (2017) 124–141 125
National Airspace System (NAS). This fact motivates the need for stochastic optimization algorithms for ATFM that account
for capacity uncertainty.
In the past three decades, the flow management problem in air transportation has been studied by many researchers in
order to address air traffic congestion. The first effort dates back to 1987, when Odoni was among the first to propose the
mathematical formulation of ATFM ( Odoni, 1987 ). Later, Bertsimas and Stock Patterson proposed a binary integer program-
ming formulation that considered both airspace and airport capacities, known as the BSP model ( Bertsimas and Patterson,
1998 ). The description of the state of aircraft is based on the trajectory of individual aircraft; therefore, BSP is a Lagrangian
model. A limitation of Lagrangian models is that the dimension of the model is related to the number of aircraft involved
in the planning time horizon. The BSP model is proved to be non-deterministic polynomial-time (NP) hard by deriving the
equivalent job-shop scheduling problem ( Bertsimas and Patterson, 1998 ). Subsequently, Bertsimas presented several exten-
sions of the BSP model to account for other features, such as rerouting ( Bertsimas et al., 2008, 2011; Bertsimas and Patterson,
20 0 0 ).
To overcome the computational limitation of the Lagrangian models, the Eulerian model of ATFM was proposed ( Menon
et al., 2004 ), which is inspired by the Daganzo Cell Transmission Model ( Daganzo, 1994, 1995 ). Since the Eulerian approach
spatially aggregates the air traffic, its computational complexity does not depend on the number of aircraft, but only on the
size of the network problem. Afterwards, an aggregate Eulerian-Lagrangian model was proposed to eliminate the splitting
and diffusion problems of some Eulerian models by taking into account the origin-destination information of flights ( Sun and
Bayen, 2008; Cao and Sun, 2011 ). Moreover, the distributed algorithms for these aggregate models have also been proposed
using the dual decomposition method ( Sun et al., 2011; Wei et al., 2013 ).
Since weather conditions are difficult to predict and have a significant impact on capacities, considerable effort s have
been made to address the capacity uncertainty. Due to the computational complexity of solving large-scale ATFM problems,
most of the stochastic ATFM models are limited to optimizing flows into a single airport, which is known as the Single
Airport Ground Holding Problem (SAGHP). As one of the first attempts, Richetta and Odoni formulated a stochastic integer
programming model for the SAGHP ( Richetta and Odoni, 1994 ). Subsequently, Ball et al. proposed a modified version for the
same problem, which solves for an optimal number of planned arrivals of aircraft during different time intervals ( Ball et al.,
2003 ). Recently, Mukherjee and Hansen proposed a model that incorporated dynamic rerouting into SAGHP ( Mukherjee
and Hansen, 20 07, 20 09 ). In all of the aforementioned models, the uncertainty in capacities was represented through a
finite number of scenarios arranged in a probabilistic decision tree. As time progressed, the branches of the tree were
realized, resulting in better information about future capacities ( Liu et al., 2008 ). Moreover, the techniques are developed to
determine probabilistic capacity profiles and scenario tree forecasts from historical data ( Liu et al., 2008 ). Unfortunately, the
probabilistic scenario-tree approach suffers significantly from the practical difficulty of not knowing the exact distribution
of the data to generate relevant scenarios. Furthermore, it generally becomes intractable quickly as the number of scenarios
increases, thereby posing substantial computational challenges.
Besides the scenario tree method, robust optimization can also address decision-making under uncertainty. The robust
optimization formulations of the ATFM problem was studied in Gupta and Bertsimas (2011) to address capacity uncer-
tainties. However, the robust optimization may suffer from highly conservative solutions, since it is a consequence of the
optimization over the worst-case realization of the uncertainty parameters. Consequently, there is an alternative method
to incorporate probabilistic information called Chance Constraints . The idea is to constrain the chance of a constraint viola-
tion, given probabilistic information about future state disturbances. This is less conservative than the robust approach of
constraining against the constraint violation for all possible disturbances. Currently, only one article has discussed the ATFM
problem with Chance constraints ( Clare and Richards, 2012 ), which is formed as a Mixed-Integer Linear Programming (MILP)
model based on the BSP model. However, this MILP model uses the brute-force method to enumerate all possible capacity
combinations. Thus the exponentially increased computational complexity prevents it from being applicable to large-scale
problems in reality.
This paper presents a novel polynomial approximation-based chance-constrained optimization method to address un-
certainty in ATFM, which could provide a computationally efficient algorithm. First, a chance-constrained model is devel-
oped based on a previous deterministic Integer Programming optimization model of ATFM to include probabilistic sector
capacity constraints. Then, to efficiently solve such a large-scale chance-constrained optimization problem, a polynomial
approximation-based approach is applied. The approximation is based on the numerical properties of the Bernstein polyno-
mial, which is capable of effectively controlling the approximation error for both the function value and the gradient. Thus,
a first-order algorithm is adopted to obtain a satisfactory solution, which is expected to be optimal. Numerical results are
reported in order to evaluate the polynomial approximation-based approach by comparing it with the brute-force method.
Moreover, since there are massive independent approximation processes in the polynomial approximation-based approach,
a distributed computing framework is designed to carry out the computation for this method. This chance-constrained op-
timization method and its computation platform are potentially helpful in their application to several other domains in air
transportation, such as airport surface operations and airline management under uncertainties.
The rest of this paper is organized as follows. Section 2 introduces the chance-constrained ATFM problem. Section 3 in-
troduces a polynomial approximation-based approach to overcome the limitation of the brute-force method. The main al-
gorithm based on the polynomial approximation-based approach is presented with computational complexity in Section 4 .
Section 5 demonstrates the parallel computing framework for the approximation-based approach. Section 6 evaluates the

126 J. Chen et al. / Transportation Research Part B 102 (2017) 124–141
Fig. 1. Link transmission model.
performance of the approximation-based approach by comparing the results with the brute-force method. Section 7 con-
cludes this paper.
2. Development of the chance-constrained model
2.1. Deterministic aggregate traffic flow management modeling
The proposed stochastic Traffic Flow Management (TFM) model is derived based on a previous deterministic Link Trans-
mission Model (LTM) for ATFM ( Cao and Sun, 2011 ). The LTM is a data-driven model. It establishes a route network based on
radar tracks extracted from Aircraft Situation Distributed to Industry (ASDI) data compiled by the Enhanced Traffic Manage-
ment System (ETMS) ( Division, 20 0 0; Volpe, 20 0 0 ). As shown in Fig. 1 , a sector is a basic airspace session that is monitored
by one or more air traffic controllers. Each flight path is a sequence of links that connects a departure airport and an arrival
airport, with each link being an abstraction of a passage through a sector. The travel time of a link is extracted from his-
torical flight data. There are thousands of aircraft traveling on their paths throughout the day, forming a multi-commodity
network across the NAS ( Sun and Bayen, 2008 ).
The LTM is modeled as a discrete-time linear system, where the state variable x k i (t) is defined as the aircraft count in
link i on route k at time t , and q k i (t) is the outflow of this link. The dynamics of the traffic flow are governed by the flow
conservation (for the first link, its upstream outflow is departure f k ( t ).):
x k i (t + 1) = x k i (t) − q k i (t) + q k i −1 (t) , ∀ i ∈ { 0 , · · · , n
k } , k ∈ K , t ∈ T
A typical deterministic TFM problem is formulated as an Integer Programming problem. By controlling the flow rate
q k i (t) , delays are minimized, while sector counts are kept below the sector capacity C s ( t ).
min d =
∑
t∈ T
∑
k ∈ K
∑
1 ≤i ≤n k
c k i x k i (t) (1)
s.t.
x k i (t + 1) = x k i (t) − q k i (t) + q k i −1 (t) (2)
∑
(i,k ) ∈ Q s i
x k i (t) ≤ C s (t) , ∑
(0 ,k ) ∈ A arr
q k 0 (t) ≤ C arr (t) , ∑
(n k ,k ) ∈ A dep
q k n k
(t) ≤ C dep (t) (3)

J. Chen et al. / Transportation Research Part B 102 (2017) 124–141 127
∑
t∈ T q k 0 (t) =
∑
t∈ T q k
n k (t) =
∑
t∈ T f k (t) (4)
T k ∗∑
t= T k 0 + T k
1 ···+ T k
i
q k i (t) ≤T k ∗ −T k
i ∑
t= T k 0 + T k
1 ···+ T k
i −1
q k i −1 (t) (5)
T k 0 + T k 1 ···+ T k i −1 ∑
t=0
q k i (t) = 0 , x k i (0) = 0 (6)
x k i (t) ∈ Z + , q k i (t) ∈ Z + (7)
∀ T k ∗ ≥ T k 0 + T k 1 · · · + T k i , i ∈ { 0 , · · · , n
k } , k ∈ K , t ∈ T , s ∈ S
The objective d is to minimize the weighted total flight time of all flights in the planning time horizon, which reflects
the realistic goal to minimize delays. Constraints (2) –(7) regulate traffic flow behaviors. Constraints (3) enforce en route
and airport capacity constraints. Constraints (4) ensure that the accumulated departures equal to the accumulated arrivals.
Constraints (5) show that every flight must dwell in a link for at least T k i
minutes. Constraints (6) and (7) represent the
initial states and integer constraints, respectively. We refer readers to Reference Cao and Sun (2011) for detailed discussions
about these constraints.
The solution to the above TFM problem is the optimal traffic flow, as well as the flow control for each route. Specifically,
vector [ x k 1 (t) , x k
2 (t ) , · · · , x k
n k (t )] represents the state of route k at time t . As t evolves, the states of the vector represent the
movement of the traffic flow. Given that traffic control is generally applied to individual aircraft rather than a flow, the flow
control obtained from this model seems impracticable. However, a disaggregation process can convert the flow control into
flight-specific actions. The idea is that these optimal states, i.e., vector [ x k 1 (t) , x k
2 (t ) , · · · , x k
n k (t )] , can be used as constraints
for scheduling the flights on route k , where variables are defined as ground delays and airborne delays associated with
individual flights. The disaggregation process is discussed in detail in Reference Sun et al. (2010) . After the disaggregation
process, the flow controls are translated into delays imposed on individual flights in each sector.
2.2. Chance constraints
The probabilistic TFM model aims to incorporate the constantly changing airspace capacities, which are caused by adverse
weather conditions, into the TFM optimization. The current TFM model is rather deterministic, i.e., considering the stochastic
airspace capacities C s ( t ), C arr ( t ) and C dep ( t ) as deterministic values. This paper proposes to impose a probabilistic constraint
on traffic flow capacities, as follows:
P
⎛
⎝
∑
(i,k ) ∈ Q s i x k i (t) ≤ C s (t) , ∀ i, t ∈ T ∑
(0 ,k ) ∈ A arr q k 0 (t) ≤ C arr (t) , ∀ i, t ∈ T ∑
(n k ,k ) ∈ A dep q k
n k (t) ≤ C dep (t) , ∀ i, t ∈ T
⎞
⎠ ≥ α (8)
where P (·) is the probability measure for the stochastic airspace capacities, meaning that the sector capacity will only raise
a feasibility issue with the probability of α ∈ (0, 1). All random components C s ( t ), C arr ( t ) and C dep ( t ) are random vectors that
represent the correlated, stochastic airspace capacities, and only correlated random capacities are meaningful for the TFM
optimization because adverse weather conditions will usually affect multiple sectors. Since the constraints (3) are all linear,
the probabilistic constraint (8) can be simply written as:
P (T (t) x (t) ≤ ξ (t)) ≥ α (9)
where x ( t ) denotes the vector of the decision variables with the associated coefficient matrix T ( t ) at time t , and ξ ( t ) is
defined as representing the random vectors at time t . Thus, the TFM optimization under the stochastic airspace capacities
can be written as:
min d =
∑
t∈ T
∑
k ∈ K
∑
1 ≤i ≤n k
c k i x k i (t) (10)
s.t.
x k i (t + 1) = x k i (t) − q k i (t) + q k i −1 (t) (11)
P (T (t) x (t) ≤ ξ (t)) ≥ α (12)

128 J. Chen et al. / Transportation Research Part B 102 (2017) 124–141
∑
t∈ T q k 0 (t) =
∑
t∈ T q k
n k (t) =
∑
t∈ T f k (t) (13)
T k ∗∑
t= T k 0 + T k
1 ···+ T k
i
q k i (t) ≤T k ∗ −T k
i ∑
t= T k 0 + T k
1 ···+ T k
i −1
q k i −1 (t) (14)
T k 0 + T k 1 ···+ T k i −1 ∑
t=0
q k i (t) = 0 , x k i (0) = 0 (15)
x k i (t) ∈ Z + , q k i (t) ∈ Z + (16)
∀ T k ∗ ≥ T k 0 + T k 1 · · · + T k i , i ∈ { 0 , · · · , n
k } , k ∈ K , t ∈ T , s ∈ S
The only difference from the deterministic model is that the capacity constraints (3) are replaced with the probabilistic
capacity constraint (12) . This problem is referred to chance-constrained TFM optimization .
Moreover, notice that the above TFM model is a linear model, except for the probabilistic constraint (12) . Thus, the
stochastic TFM problem can be written in the following concise form:
min d =
∑
t∈ T c ′ x (t)
s.t.
P (T (t) x (t) ≤ ξ (t)) ≥ α (17)
Ax ≤ b
x (t) ∈ Z + , t ∈ T
where c represents the vector of the weight coefficients; A and b are the coefficients corresponding to the original linear
constraints.
3. Solving methods for chance-constrained TFM problem
The probabilistic programming indicates that some of the constraints may be violated at a well-controlled, very low
chance. Not surprisingly, the probabilistic programming problem is difficult to solve for multiple reasons. First, it becomes
too costly to evaluate the joint distribution function as the optimization solver moves toward the optimal solution. Second,
the convexity of both the constraints and the feasible set needs to be preserved throughout the optimization. The convex-
ity guarantees the global optimal solution, and only convex-preserved transformations are allowed. Third, the problem is
computationally demanding. Thus, our novel method is one of the better solutions available for large-scale problems.
In this section, the brute-force method is introduced based on a previous chance-constrained model ( Clare and Richards,
2012 ), which is formed as a MILP optimization model. Although the MILP model can provide accurate solutions to the
chance-constrained model, the disadvantage with the exponentially increased computational demands prevents the MILP
model from being applied to real operations with large-scale problems. Therefore, this paper introduces a polynomial-based
approximation method to efficiently solve the chance-constrained model, which could overcome the computational limita-
tion of the MILP model when solving large-scale problems.
3.1. The brute-force method
In order to solve the chance-constrained ATFM problem, the brute-force MILP optimization model is proposed in Clare
and Richards (2012) , which is developed based on the Bertsimas-Stock Patterson model ( Bertsimas and Patterson, 1998 ).
The MILP model enumerates all admissible sector capacity combinations, whose joint probability values satisfy the chance
constraints, to form a feasible set for sector capacity combinations. A simple example is illustrated as following: considering
just two sectors, ξ 1 , ξ 2 are defined to represent the sector capacity as random variables, and the joint probability is shown
as Table 1 . The number of aircraft assigned to each sector is denoted as sn 1 and sn 2 , respectively. The goal is to satisfy
the chance constraint P ( ξ 1 ≥ sn 1 , ξ 2 ≥ sn 2 ) ≥ α. Table 2 shows the P ( ξ 1 ≥ sn 1 , ξ 2 ≥ sn 2 ) for all combinations of sn 1 and
sn 2 , based on Table 1 . If α is defined as being 0.8, only ( sn 1 = 1 , sn 2 = 1 ) and ( sn 1 = 2 , sn 2 = 1 ) can be chosen to form a
feasible set. Therefore, the MILP model defines a set of safe capacity limits for the two sectors, which allow them to fulfill
the chance constraint.
Based on the same idea of the feasible capacity set, the probabilistic constraint (8) in Section 2.2 can be replaced by
several linear constraints. Suppose that there are m sectors(treating an airport as a sector) in total, the cumulative joint
probability matrix for all combinations that can be built, which is an m-dimensional matrix. This m-dimensional matrix

J. Chen et al. / Transportation Research Part B 102 (2017) 124–141 129
Table 1
Example joint probability.
ξ 1 , ξ 2 1 2
1 0.06 0.14
2 0.24 0.56
Table 2
Cumulative example joint
probability.
sn 1 , sn 2 1 2
1 1 0.7
2 0.8 0.56
is translated into a vector P ( p i , t ), in which each element represents the probability for a combination in the set of all
admissible sector capacity combinations (denoted as M ), for every time step t . A matrix I ( p i , j ) is defined to link the elements
of P ( p i , t ) to their corresponding capacity limits ( sn j ) in each dimension of the m-dimension matrix. Moreover, a binary
variable δ( p i , t ) is defined as an indicator for which element in P ( p i , t ) is activated. The probabilistic constraint (8) can be
replaced by the following linear constraints: ∑
(i,k ) ∈ Q s i
x k i (t) ≤∑
p i ∈ M
δ(p i , t) I(p i , j) (18)
∑
p i ∈ M
P (p i , t) δ(p i , t) ≥ α (19)
∑
p i ∈ M
δ(p i , t) = 1 δ(p i , t) ∈ { 0 , 1 } (20)
Constraint (18) enforces the number of aircraft assigned to each sector to be under the safe limits. Constraint (19) ensures
that the chance constraint will be satisfied. Constraint (20) indicates that only one feasible combination can be activated for
each time step.
Therefore, the chance-constrained problem can be transformed into a MILP problem. However, it is important to note
that the MILP formulation requires the introduction of an additional binary variable for every possible combination of sector
capacities, for every time step. For example, considering a one-hour problem with 10 sectors, each sector has 10 possible
capacity values. Then 60 × 10 10 new binary variables will be introduced. Therefore, the computational complexity of the
original problem is increased exponentially, which prevents the MILP formulation from being applicable to the large-scale
problem in the real TFM operation.
3.2. Polynomial approximation
3.2.1. Problem definition
The chance constraint would greatly complicate the computational perspective of the problem because of the loss of con-
vexity, in both its feasible set and the constraint itself. Even though it is extremely difficult to solve a chance-constrained
optimization for a global optimal solution, there are exceptions. In Prékopa (1988) , the author showed that under less re-
strictive assumptions, the chance-constrained model in Section 2.2 would have a convex feasible set. The constraint would
be equivalently transformed into a convex program, which would be efficiently solved, as long as the function and its gra-
dient (or subgradient) are available.
The required assumptions are imposed, based on the log-concavity of the distribution presented in Saumard and Wellner
(2014) .
Definition 1. A function f ( z ) ≥ 0, z ∈ R
m is said to be logarithmically concave (in short form, logconcave), if for any z 1 , z 2and 0 < λ < 1, we have the inequality
f (λz 1 + (1 − λ) z 2 ) ≥ [ f (z 1 )] λ[ f (z 2 )] (1 −λ)
If f ( z ) ≥ 0 for z ∈ R
m , then this means that logf ( z ) is a concave function in R
m .
Definition 2. A probability measure defined on the Borel sets of R
m is said to be logarithically concave (logconcave) if for
any convex subsets of R
m : X, Y and 0 < λ < 1 we have the inequality
P (λX + (1 − λ) Y ) ≥ [ P (X )] λ[ P (Y )] (1 −λ)
where λX + (1 − λ) Y = { z = λx + (1 − λ) y | x ∈ X, y ∈ Y } .

130 J. Chen et al. / Transportation Research Part B 102 (2017) 124–141
Based on these two definitions, we have
Theorem 1. If ξ ∈ R
m is a random variable, the probability distribution of which is logconcave, then the probability distribution
function F (x ) = P (ξ ≤ x ) is a logconcave function in R
m .
The proof of Theorem 1 and the rationale of Definitions 1 and 2 are presented in Shapiro et al. (2014) , and this paper
omits them. Theorem 1 is applied to the probabilistic constraint of model (17) , and if the distribution of ξ is logconcave, we
have
P (T (t) x (t) ≤ ξ (t)) ≥ α ⇐⇒ 1 − F (T (t) x (t)) ≥ α ⇐⇒
log(1 − α) ≥ log (F (T (t ) x (t ))) ⇐⇒ log (F (T (t ) x (t ))) − log(1 − α) ≤ 0 (21)
Thus, the new model can be written as
min d =
∑
t∈ T c ′ x (t)
s.t.
g t (x ) = log(F (T (t ) x (t ))) − log(1 − α) ≤ 0 (22)
Ax ≤ b
x (t) ∈ Z + , t ∈ T
With the exception of one constraint, g t (x ) : log (F (T (t ) x (t ))) − log(1 − α) ≤ 0 , model (22) is a linear programming. Al-
though Constraint (21) is nonlinear, it is convex, which makes model (22) a convex program with respect to x . For any
feasible point x 0 of model (22) , as long as we have the function value at x 0 , i.e., g t ( x 0 ) and its gradient g t ( x 0 ) (subgradi-
ent if g t ( x ) is nondifferentiable) at x 0 , then a first-order gradient algorithm can be adopted to obtain the optimal solution
( Nesterov, 2013 ).
The assumption that ξ follows a logconcave distribution, but lacks closed form distributional information, would be jus-
tified with two phases. First, in air traffic management, the historical data of ξ from the underlying distribution are mostly
in the form of empirical distributions. When handled properly, the empirical distribution will be presented as a continu-
ous distribution without the distributional information. By the Glivenko–Cantelli Theorem (see Van der Vaart (20 0 0) ), the
empirical distribution function estimates the cumulative distribution function and converges with a probability of 1. That is,
the empirical distribution can be presented as an underlying continuous distribution. Second, once the empirical distribu-
tion is in the format of a continuous distribution (but still lacks distribution information), this paper would further assume
logconcavity because so many commonly used distributions are, indeed, logconcave. For example, the normal distribution,
uniform distribution, gamma distribution (with a shape parameter greater than 1), beta distribution (with all parameters
greater than 1), Weibull distribution, Laplace distribution, logistic distribution, exponential distribution and extreme value
distribution are logconcave. There are only a few commonly used distributions that are not logconcave, such as the lognor-
mal distribution, t-distribution, and Chi-square distribution, which are often used to describe the distributions of various
statics rather than random variables raised from real problems.
In fact, most of the previous work on airspace capacity prediction has focused on the Airport Acceptance Rate (AAR),
the number of arrivals an airport is capable of accepting each hour. As mentioned in the introduction, most studies focus
on generating scenario tree of AAR forecasts from historical data( Liu et al., 2008; Buxi and Hansen, 2011 ). For generat-
ing AAR distributions, the most common approach is the Weather Translation Model for Ground Delay Program Planning
( Cunningham et al., 2012; Provan et al., 2011 ). Recently, a AAR Distribution Prediction Model is proposed based on the
Bayesian network model, which could predict the distribution based on the weather forecasts( Cox and Kochenderfer, 2016 ).
There is few literature on en route sector capacity distribution analysis, which is still an open area for future study.
With the logconcave distribution assumption, the formulation (22) is relaxed into a continuous problem. Moreover, if we
define g t (x ) = log(F (T (t ) x (t ))) − log(1 − α) ≤ 0 , then the formulation becomes a standard constrained optimization problem
as follows:
min f 0 (x ) = c ′ x s.t.
g t (x ) ≤ 0 , t ∈ T (23)
Ax ≤ b
x ≥ 0
where x, A and b represent the vectors, in which t is included as one dimension.
We want to emphasize that all of the approximation method described in the rest of this section will be based on this
standard model (23) , and to be concise, all of the indices in this subsection are independent of the former ones in Section 2 .
3.2.2. Details of the approximation
The key to solving model (23) is to effectively evaluate the gradient (or subgradient) of g t ( x ). This subsection will build
a polynomial-based approximation of g ( x ) and use the gradient of the polynomial to approximate its original. Such an ap-
proximation has two advantages: first, thanks to the shape-preserving property of the Bernstein polynomial, we would

J. Chen et al. / Transportation Research Part B 102 (2017) 124–141 131
effectively control the approximation errors for both the function values and their gradient at the same time. Second, we
show that, under a large enough sample size, the obtained optimal solution will converge to the true optimal solution with
a probability of 1.
Suppose a feasible x ∈ R such that Ax ≤ b, x ≥ 0, x = [ x 1 ; . . . ; x n ] where x 1 , . . . , x n ∈ R
1 . We would impose an upper bound
and a lower bound on each component of x , as follows:
� i ≤ x i ≤ u
i , i = 1 , . . . , n. (24)
We are interested in
∇g t (x ) :=
[ ∂g t (x )
∂x 1 ; . . . ; ∂g t (x )
∂x n
] (25)
and each component ∂g t (x )
∂x i : R → R is a univariate function with respect to x i ∈ [ � i , u i ].
Let’s define the i th marginal function of g t ( x ) as g i t (x i ) , which is the unvariate function with respect to x i ∈ [ � i , u i ]. g i t (x i )
is essentially the function g t ( x ) with x 1 , . . . .x i −1 , x i +1 , . . . .., x n as a constant value. In other words, the univariate function
g i t (x i ) is the orthogonal projection of g t ( x ) onto x i . Since g t ( x ) is convex, all of its marginal functions g i t (x i ) , i = 1 , . . . n are
convex with respect to x i .
Our approach is to approximate all of the marginal functions of g i t (x i ) with a convex, differentiable polynomial of degree
k, p k ( x i ) at a fixed x. Then, we estimate
∂g t (x )
∂x i by p ′
k (x i ) , such that the problem of approximating g t ( x ) is decomposed into
n independent univariate approximation problems.
In this paper, the Bernstein polynomial is adopted to construct the approximation p k ( x i ). For the sake of simplifying the
notation, we use φ( y ) to represent one univariate function g i t (x i ) . Without a loss of generality, we assume y ∈ [0, 1] because
we can make a linear change of variable, if necessary, to transform any finite interval [ � i , u i ] onto [0, 1].
Definition 3. The Bernstein polynomial of a function φ( y ), y ∈ [0, 1] is
B k (φ; y ) :=
k ∑
j=0
(k
j
)y j (1 − y ) k − j φ( j/k ) (26)
and
B k (φ; 0) = φ(0) , B k (φ; 1) = φ(1) . (27)
Theorem 2 (Bernstein Theorem) . Let φ( y ) be continuous on [0, 1] . Then
lim
k →∞
B k (φ; y ) = φ(y ) (28)
any point y ∈ [0, 1] and the limit (28) hold uniformly in [0, 1] . That is, given an ε > 0, for all large enough k, we have
| φ(y ) − B k (φ; y ) | ≤ ε, y ∈ [0 , 1] . (29)
The proof is in Davis (1975) , and we omit it. This theorem shows that the Bernstein polynomial can approximate any
continuous univariate function on a closed interval. However, for a convex function φ( y ), its Bernstein polynomial approxi-
mation may not be convex. Thus, we discard the idea of directly approximating g i t (x i ) by the Bernstein polynomial. Instead,
we find the following important result.
Theorem 3. There exists a sequence of component functions:
ψ 0 (y ) , ψ 1 (y ) , ψ 2 (y ) , . . . , (30)
each is convex on [0, 1], such that any function φ( y ) that is convex on [0, 1] may be approximated with arbitary accuracy on [0,
1] by a sum of non-negative multiples of the component functions.
The proof is in Phillips and Taylor (1970) . Since this result plays the central role of this paper, we will present the proof
as a courtesy. We adopt our notations (not the original) as being consistent with our problem.
Proof. First, we assume that φ( y ) is twice differentiable on [0, 1] because if otherwise, we can apply Theorem 2 to construct
a Bernstein polynomial, which approximates φ( y ) to within
ε
2 on [0, 1] using a degree of k > 2. We then use the obtained
Bernstein polynomial to replace φ( y ). We use φ′ ( y ) and φ′ ′ ( y ) to denote the first- and second-order derivatives of φ( y ),
respectively. Let
B k (φ′′ ; y ) =
k ∑
j=0
(k
j
)y j (1 − y ) k − j φ′′ ( j/k ) (31)
represent the Bernstein polynomial of degree k for φ′ ′ ( y ). Let us observe that y j (1 − y ) k − j ≥ 0 on [0, 1] and that in (31) are
being approximated by the sum of non-negative multiples of the polynomials y j (1 − y ) k − j . For k ≥ 2, define p k ( y ) by
p ′′ (y ) = B k −2 (φ′′ ; y ) , p ′ (0) = φ′ (0) , p k (0) = φ(0) . (32)
k k
132 J. Chen et al. / Transportation Research Part B 102 (2017) 124–141
We see that p k ( y ) is a polynomial of degree at most k . We also define β j, k ( y ) for 2 ≤ j ≤ k , by
β ′′ j,k (y ) = y j−2 (1 − y ) k − j , β ′
j,k (0) = β j,k (0) = 0 . (33)
To complete the definition of polynomials β j, k ( y ), we define
β0 ,k (y ) = sign [ φ(0)] , β1 ,k (y ) = x sign [ φ′ (0)] . (34)
The relevance of the choice of functions (34) will be seen later. We then have
p k (y ) =
k ∑
j=0
c ∗j β j,k (y ) , (35)
where c ∗j ≥ 0 and β ′′
j,k (y ) ≥ 0 on [0, 1]. Now, given any ε > 0, applying Theorem 2 , we have
| B k −2 (φ′′ ; y ) − φ′′ (y ) | ≤ ε (36)
on [0, 1]. That is
| p ′′ k (y ) − φ′′ (y ) | ≤ ε (37)
on [0, 1] and therefore, for y ∈ [0, 1], ∣∣∣∫ y
0
(p ′′ k (t) − φ′′ (t)) dt
∣∣∣ ≤∫ y
0
| p ′′ k (t) − φ′′ (t) | dt ≤ εy ≤ ε. (38)
Using (32) , the inequality (38) gives
| p ′ k (y ) − φ′ (y ) | ≤ ε (39)
for y ∈ [0, 1]. Similarly, another integration shows that
| p k (y ) − φ(y ) | ≤ ε (40)
for y ∈ [0, 1]. Note that the polynomial β j, k ( y ) may be ψ 0 (y ) , ψ 1 (y ) , ψ 2 (y ) , . . . . We set
ψ j (y ) = β j,k (y ) , 2 ≤ j ≤ k, ψ 0 (y ) = sign [ φ(0)] , ψ 1 (y ) = x sign [ φ′ (0)] (41)
where for j ≥ 2,
β ′′ j,k (y ) = y j−2 (1 − y ) k − j = x j−2
k − j ∑
i =1
(−1) i (
k − j
i
)y i (42)
and we have
β j,k (y ) = y j k − j ∑
i =0
(−1) i
(k − j
i
)y i
[(i + j)(i + j − 1)] . (43)
�
This theorem shows that for any convex function φ( y ), y ∈ [0, 1], we can always approximate both φ( y ) and its derivative
φ′ ( y ) within ε uniformly with the polynomial
p k (y ) =
k ∑
j=0
c ∗j ψ j (y ) (44)
of degree k , regardless of the differentiability of φ( y ). As long as all of the coefficients in (44) are non-negative, c ∗j ≥ 0 , j =
0 , 1 , . . . , k, p k ( y ) will be convex. We also need k + 1 non-negative coefficients c ∗0 , . . . , c ∗
k to construct p k ( y ). To obtain these
coefficients, we need a set of points with coordinates (y i , φ(y i )) , i = 1 , 2 , . . . , k + 1 . We solve the following problem
min
{
max i =1 , ... ,k +1
{ φ(y i ) −k ∑
j=0
c ∗j ψ j (y i ) } , c ∗j ≥ 0
}
(45)
Definition 4. The p k ( y ) with coefficients c ∗0 , . . . , c ∗
k is called the best approximation of degree k .
We now need to determine the proper choice of the degree k . The following theorem addresses this issue.
Theorem 4 (Jackson’s Theorem V) . If φ( y ) is r-differentiable on y ∈ [0, 1], and φ( y ) is approximated by p k ( y ), then the approx-
imation error of φ( y ) on [0, 1] satisfies:
max y ∈ [0 , 1]
| φ(y ) − p k (y ) | ≤(π
2
)r | φ(r) (ω) | [(k − r + 2) . . . k (k + 1)]
, k ≥ r (46)

J. Chen et al. / Transportation Research Part B 102 (2017) 124–141 133
Table 3
Error bounds as the degree k of p k ( y ) increases.
k 4 5 6 7 8 9 10 11 12 20 40 50
Error bounds 1 0.67 0.48 0.36 0.28 0.22 0.18 0.15 0.13 0.048 0.012 0.008
Step
Step
Step
Step
Step
where φ( r ) ( ω) represents the r-order derivative of φ( y ) at some ω ∈ [0, 1] .
The proof of this theorem is in Cheney (1966) . This theorem shows that if we approximate an r−differentiable function by
p k ( y ), the error will be quickly reduced by increasing the order of the polynomial. For example, when the degree increases
from k to k + 1 , the rate of the error-bound reduction will be (π
2
)r | φ(r) (ω) | [(k − r + 3) . . . (k + 1)(k + 2)] (
π
2
)r | φ(r) (ω) | [(k − r + 2) . . . k (k + 1)]
=
k − r + 2
k + 2
< 1 . (47)
In the previous discussion, we assume that φ( y ) is twice-differentiable, i.e., r = 2 . If we evaluate the error bound when
k = 4 , and
π2
2
| φ(2) (ω) | 4 × 5
is the scale of the error base valued at 1, we present the results in the following Table 3 .
From Table 3 , increasing k from 4 to 5 will reduce the error bound to 0.67 of its original value, while increasing k
from 4 to 20 will reduce the error bound to 0.048 of its original value. When we increase k from 4 to 50, the new error
bound will be reduced to 0.008 of its original value. Given the result of Theorem 3 and the good performance of the “best
approximation,” i.e., p k ( y ), the error bound when k = 4 would already be a well-bounded value. Thus, when we use k = 50 ,
the new error bound will be reduced to a fraction of 0.008, which should serve us adequately well.
Now we determine the k + 1 coordinates, i.e., (y i , φ(y i )) , i = 1 , . . . , k + 1 to construct p k ( y ).
Proposition 1. Let p k ( y ) be the polynomial constructed from k + 1 coordinates (y i , φ(y i )) , i = 1 , . . . , k + 1 , Then, ∣∣∣φ(y ) − p k (y )
∣∣∣ =
φ(k +1) (ω)
(k + 1)! �k +1
i =1 (y − y i ) (48)
where ω lies in the smallest interval containing y 1 , . . . , y k +1 and y.
This proposition is in Stewart (1993 , Lecture 20). Since we can apply Theorem 2 to approximate any continuous function
by a Bernstein polynomial, which is differentiable, we can assume that the ( k + 1 )-order derivative φ(k +1) (y ) exists, and it
is a bounded value for y ∈ [0, 1]. Thus, in order to reduce the error of approximation, we need to minimize �(k +1) i =1
(y − y i )
by choosing the Chebyshev nodes on [0, 1], as follows:
y i :=
1
2
− 1
2
cos
(2 i − 1
2 k + 2
π), i = 1 , . . . , k + 1 . (49)
The technical detail regarding the minimization of the approximation error by adopting Chebyshev nodes is in ( Stewart,
1993 ).
The procedure to estimate φ′ ( y ) by a polynomial p k ( y ) is summarized in the following steps:
1. Determine the overall error bound ε > 0.
2. Choose the degree k .
3. Calculate k +1 Chebyshev nodes y i and coordinates ( y i , φ( y i )), i = 1,... .. k +1.
4. Solve the model (44) for the coefficients c ∗0 , ... , c ∗
k and construct p k ( y ).
5. Use p ′ k (y ) as an approximation of φ′ ( y ).
4. Algorithms and computational complexity
4.1. Algorithms
Based on the approximation approach in Section 3.2 , the function values and gradients for the chance constraint g t ( x )
can be estimated for any given point x̄ . Therefore a first-order algorithm can be adopted to solve the whole problem. In
this paper, the gradient mapping method in Nesterov (2013) is adopted as the primary algorithm for two reasons: first, this
method terminates within a polynomial number of iterations; second, only the first-order information (i.e., function value
and gradient) is required.
To perform the gradient mapping method, the formulation (23) can be transformed into the parametric max-type func-
tion:
f (d; x ) = max { f 0 (x ) − d; g t (x ) , t ∈ T } , d ∈ R
1 , x ∈ Q . (50)

134 J. Chen et al. / Transportation Research Part B 102 (2017) 124–141
where the functions g t are convex and smooth, and Q is a closed convex set defined by Ax ≤ b and x ≥ 0. Moreover, a
linearization of a parametric max-type function f(d;x) is shown as:
f (d; x̄ ; x ) = max t∈ T
{ f 0 ( ̄x ) + 〈 f ′ 0 ( ̄x ) , x − x̄ 〉 − d; g t ( ̄x ) + 〈 g ′ t ( ̄x ) , x − x̄ 〉} . (51)
To introduce a gradient mapping in a standard way, let us fix some γ > 0, denoted by:
f γ (d; x̄ ; x ) = f (d; x̄ ; x ) +
γ
2
‖ x − x̄ ‖
2 (52)
f ∗(d; x̄ ;γ ) = min
x ∈ Q f γ (d; x̄ ; x ) (53)
x f (d; x̄ ;γ ) = arg min
x ∈ Q f γ (d; x̄ ; x ) (54)
g f (d; x̄ ;γ ) = γ ( ̄x − x f (d; x̄ ;γ )) . (55)
where g f (d; x̄ ;γ ) is the constrained gradient mapping of the problem (23) .
The main algorithm for the chance-constrained problem is shown in Algorithm 1 .
Algorithm 1 Chance-constrained TFM optimization based on polynomial approximation.
1: Initialization: Choose x 0 ∈ Q , κ = 0 . 25 , L = 10 , d 0 = 1 and accuracy ε > 0 .
2: rth iteration ( r ≥ 0 ).
a) Set x r, 0 = x r , y r, 0 = x r and α∗0
= 0 . 5
for the jth internal iteration:
Approximate g t (y r, j ) and ∇g t (y r, j ) by the method in Section 3.2
Compute f (d r ; y r, j ) and f ′ (d r ; y r, j ) .
Set x r, j+1 = x f (d r ; y r, j ; L )
Solve α∗j+1
∈ (0 , 1) from equation: α∗j+1
2 = (1 − α∗j+1
) α∗j
2
Set β∗j
=
α∗j (1 −α∗
j )
α∗j
2 + α∗j+1
and y r, j+1 = x r, j + β∗j (x r, j+1 )
If f ∗(d r ; x r, j ; 0) ≥ (1 − κ) f ∗(d r ; x r, j ; L )
then stop the internal process and set j(r)=j.
Set j ∗(r) = arg min
0 ≤ j ≥ j (r) ( f ∗(d r ; x r, j ; L )) and x r+1 = x f (d r ; y r, j ∗(r) ; L ) .
Global stop: If at some iteration of the internal scheme we have f ∗(d r ; x r, j ; L ) ≤ εb) update d r : d r+1 = d ∗(x r, j(r) , d r ) ,
where d ∗( ̄x , d) is the root in d of function f ∗(d; x̄ ; 0)
r=r+1
4.2. Computational complexity
The computational complexity of the polynomial approximation approach for the chance-constrained problem is analyzed
as follows. First, the computational complexity of evaluating g t ( x ) and g t ( x ) at a given x̄ is demonstrated. Second, we
show the overall complexity with the gradient mapping as the main algorithm. Note that the arithmetic operations count
is a measure of the computational complexity, which ignores the fact that adding or multiplying large integers or a high-
precision floating point number is more demanding than adding or multiplying single-digit integers. In other words, this
paper charges the uniform cost for each computational operation.
First of all, we need to calculate the Chebyshev nodes and evaluate the φ( y i ). The cost of calculating each coordinate
( y i , φ( y i )) is a constant value, denoted as P. To construct each g i t (x i ) , we need k+1 coordinates, which takes (k + 1) P . The
construction of model (45) needs to calculate ψ 0 (x i ) , . . . , ψ k (x i ) . Since these terms are simple polynomials and each one of
their calculations only takes up to O ( k ) arithmetic operations, the total cost of calculating ψ 0 (x i ) , . . . , ψ k (x i ) will take k + 1
times of O ( k ) for each item (there are k+1 items for a simple polynomial of degree k). Thus, it takes up to (k + 1) 2 O (k ) +(k + 1) P to construct model (45) .
Model (45) is a convex optimization problem with k+1 variables, and its computational complexity is O ((k + 1) 3 ) in the
worst-case scenario, according to Boyd and Vandenberghe (2004) . With the obtained c 0 , . . . , c k , it will take O ( k ) to calculate
the value of g t ( x ) and ∇g t ( x ). Therefore, it takes
n { O ((k + 1) 3 ) + O (k ) + (k + 1) 2 O (k ) + (k + 1) P } arithmetic operations to obtain the approximate values of g t ( x ) and ∇g t ( x ).
By adopting the gradient mapping method in Nesterov (2013) , we can get the following result:
J. Chen et al. / Transportation Research Part B 102 (2017) 124–141 135
Fig. 2. Parallel framework.
Proposition 2. The gradient mapping method takes at most
1
ln (2(1 − κ)) ln
d 0 − d∗(1 − κ) ε
(56)
iterations to obtain an ε-optimal solution, where κ is a constant (e.g., κ = 0 . 25 ) and d 0 , d ∗ are the progressively updated penalty
coefficients.
The proof is in Nesterov (2013) . In the proof, both κ and d 0 − d ∗ are well-bounded values. Therefore, the iteration value
of (56) will be bounded, as well.
Therefore, the overall number of arithmetic operations toward an ε-optimal solution will be
n { O ((k + 1) 3 ) + O (k ) + (k + 1) 2 O (k ) + (k + 1) P } 1
ln (2(1 − κ)) ln
d 0 − d∗(1 − κ) ε
when the gradient mapping algorithm is used.
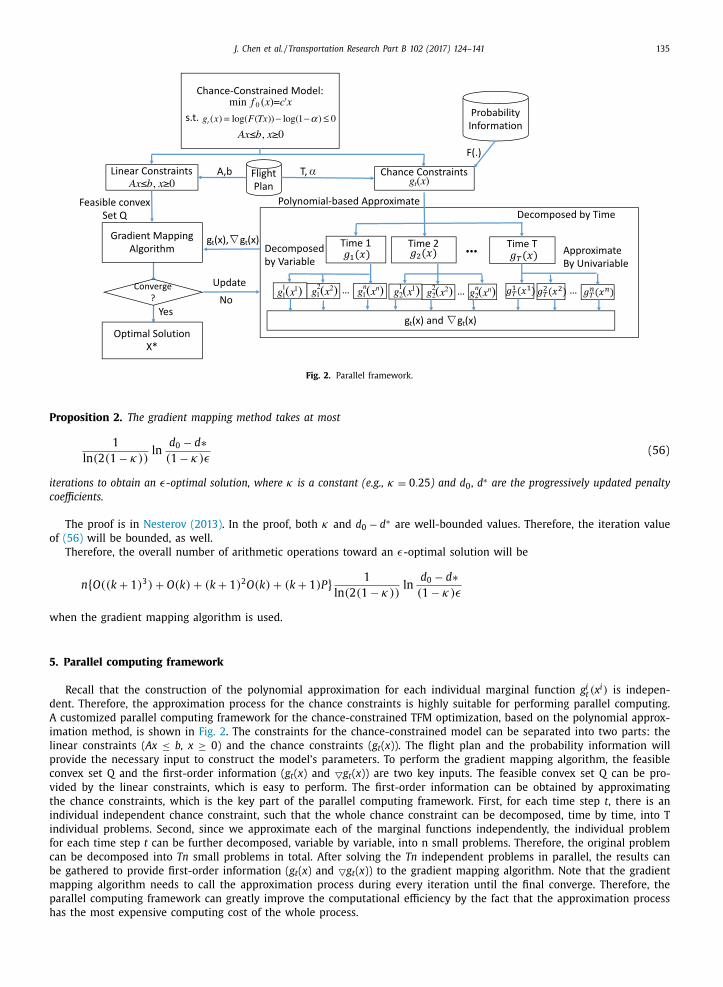
5. Parallel computing framework
Recall that the construction of the polynomial approximation for each individual marginal function g i t (x i ) is indepen-
dent. Therefore, the approximation process for the chance constraints is highly suitable for performing parallel computing.
A customized parallel computing framework for the chance-constrained TFM optimization, based on the polynomial approx-
imation method, is shown in Fig. 2 . The constraints for the chance-constrained model can be separated into two parts: the
linear constraints ( Ax ≤ b, x ≥ 0) and the chance constraints ( g t ( x )). The flight plan and the probability information will
provide the necessary input to construct the model’s parameters. To perform the gradient mapping algorithm, the feasible
convex set Q and the first-order information ( g t ( x ) and g t ( x )) are two key inputs. The feasible convex set Q can be pro-
vided by the linear constraints, which is easy to perform. The first-order information can be obtained by approximating
the chance constraints, which is the key part of the parallel computing framework. First, for each time step t , there is an
individual independent chance constraint, such that the whole chance constraint can be decomposed, time by time, into T
individual problems. Second, since we approximate each of the marginal functions independently, the individual problem
for each time step t can be further decomposed, variable by variable, into n small problems. Therefore, the original problem
can be decomposed into Tn small problems in total. After solving the Tn independent problems in parallel, the results can
be gathered to provide first-order information ( g t ( x ) and g t ( x )) to the gradient mapping algorithm. Note that the gradient
mapping algorithm needs to call the approximation process during every iteration until the final converge. Therefore, the
parallel computing framework can greatly improve the computational efficiency by the fact that the approximation process
has the most expensive computing cost of the whole process.

136 J. Chen et al. / Transportation Research Part B 102 (2017) 124–141
Fig. 3. Small-sized example.
Table 4
Flight schedule.
Flights f k ( t ) Origin Destination Route
f 1 [2,1,1,0,0,0,0,0,0,0,0] DTW CLE KDT W − ZOB 29 − ZOB 47 − ZOB 49 − KCLE
f 2 [2,1,1,0,0,0,0,0,0,0,0] CLE TOL K CLE − Z OB 49 − Z OB 47 − KT OL
f 3 [2,1,1,0,0,0,0,0,0,0,0] TOL ERI KT OL − ZOB 47 − ZOB 26 − ZOB 79 − KERI
f 4 [2,1,1,0,0,0,0,0,0,0,0] ERI DTW KERI − ZOB 79 − ZOB 26 − ZOB 29 − KDT W
f 5 [2,1,1,0,0,0,0,0,0,0,0] DTW TOL KDT W − ZOB 29 − ZOB 47 − KT OL
f 6 [2,1,1,0,0,0,0,0,0,0,0] CLE ERI K CLE − Z OB 49 − Z OB 79 − KERI
Table 5
Sector capacity distribution.
Capacity(C) 1 2 3 4
P ( C ) 0.0321 0.0871 0.2369 0.6439
6. Simulation results
6.1. Model validation with a small-sized example
6.1.1. Example setup
As stated in Section 3.1 , the brute-force MILP method has a limitation in handling large-scale real problems, but it
could provide accurate results for small-sized problems. Therefore, the MILP method could be an ideal contrast to the
approximation-based method if a small-sized TFM problem could be provided. In order to evaluate the accuracy of the novel
approximation-based method, a small-sized TFM problem is developed to perform the comparison. As shown in Fig. 3 , the
designed small TFM problem consists of five sectors (ZOB29, ZOB47, ZOB49, ZOB79, ZOB26 at the Cleveland Air Route Traffic
Control Center) and four airports (denoted as k 1 : DTW, k 2 : TOL, k 3 : CLE, k 4 : ERI ). The flight plan is shown in Table 4 , which
contains six flight routes with the corresponding departure schedule for each time step ( f k ( t )). Each flight is assumed to be
able to traverse each sector in one time period, and there are 11 planning time periods in total (note that these are abstract
periods and could be defined by real time periods, such as 15 min, in a full-scale problem). For simplification, the capacity
of each sector is assumed to be the same and set at a maximum of 4. All sectors are assumed to be independent and sub-
ject to the same probability distribution, given in Table 5 . The corresponding cumulative probability ( P ( C ≥ sn j )) is shown

J. Chen et al. / Transportation Research Part B 102 (2017) 124–141 137
Table 6
Cumulative probability : P ( C ≥ sn j ).
Number of flights( sn j ) 0 1 2 3 4 ≥ 5
P ( C ≥ sn j ) 1.0 1.0 0.9679 0.8808 0.6439 0
Table 7
Optimal flight flow based on MILP.
Time sn 1 sn 2 sn 3 sn 4 sn 5 P ≥ 0.8
0 0 0 0 0 0 1
1 0 0 0 0 0 1
2 3 2 2 0 0 0.825
3 1 3 1 2 2 0.825
4 2 2 1 0 3 0.825
5 1 3 2 1 2 0.825
6 2 2 2 2 2 0.849
7 1 3 2 1 2 0.825
8 1 1 1 2 0 0.9679
9 1 0 1 0 1 1
10 0 0 0 0 0 1
obj = 118
1 0 1 2 3 4 5 60
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Pro
bab
ility
P(C
>=sn
j)
Number of flights assigned to the sector
Fig. 4. Cumulative probability.
in Table 6 , which represents the probability of satisfying the sector’s capacity limit when assigning sn j flights to that sector.
Note that if the sectors are not independent, then only the calculations of the joint probability distribution change, and the
method to form the feasible combination set of the MILP model is the same.
6.1.2. Result of MILP
The result of MILP is solved with the chance constraints’ significance level of 0.8 ( α = 0 . 8 ). The result is then collected
to check the feasibility of the chance constraint, which is shown in Table 7 . It is clear to see that the chance constraints
are all satisfied at each time step t . The original objective is 118, based on the MILP method, which is the accurate optimal
solution. Later, we will use this accurate optimal solution to evaluate the approximation-based method.
6.1.3. Result of approximation-based approach
To perform the approximation-based approach, a log-concave continuous probability distribution is provided, as shown
in Fig. 4 , which has the exact cumulative probability ( P ( C ≥ sn j )) with the discrete one in Table 5 . Therefore, the comparison
is meaningful with the same probability information. With the same significance level of 0.8 ( α = 0 . 8 ), the result, based on

138 J. Chen et al. / Transportation Research Part B 102 (2017) 124–141
Table 8
Optimal flight flow based on the approximation method in real value.
Time sn 1 sn 2 sn 3 sn 4 sn 5 P ≥ 0.8
0 0 0 0 0 0 1
1 0 0 0 0 0 1
2 2.156 1.165 2.229 1.648 1.166 0.894
3 2.283 2.562 1.0 0 0 2.331 2.194 0.803
4 2.061 2.574 1.551 1.370 2.236 0.836
5 1.874 2.228 2.226 0.966 2.015 0.859
6 1.667 2.033 1.799 0.851 1.836 0.905
7 1.959 1.773 1.781 0.833 1.719 0.910
8 0.0 0 0 2.108 1.552 0.0 0 0 0.883 0.949
9 0.0 0 0 1.552 0.0 0 0 0.0 0 0 0.0 0 0 0.986
10 0.0 0 0 0.0 0 0 0.0 0 0 0.0 0 0 0.0 0 0 1
obj = 115.8
Table 9
Optimal flight flow based on the approximation method in
integer value.
Time sn 1 sn 2 sn 3 sn 4 sn 5 P ≥ 0.8
0 0 0 0 0 0 1
1 0 0 0 0 0 1
2 2 1 3 0 1 0.853
3 2 3 0 2 2 0.800
4 3 2 2 0 2 0.800
5 2 3 2 1 2 0.800
6 0 2 2 2 2 0.878
7 2 2 2 0 0 0.907
8 0 2 1 1 0 0.968
9 0 1 0 2 1 0.968
10 1 0 0 0 2 0.968
obj = 121
the approximation-based method, is shown in Table 8 , which are real numbers before the rounding process. It is clear that
the approximation-based method could provide feasible optimal solutions, which also satisfy all of the chance constraints
for each time step t. The original objective is reduced to 115.8 because the feasible set of the integer problem is only a
subset of the real-valued problem. Thus, this smaller optimal objective is reasonable and could be evidence to demonstrate
that the approximation-based approach could achieve a valid real-valued optimal solution.
To achieve the integer-valued solution for the original problem, the Branch-and-Bound (B&B) algorithm is performed with
the Integer Programming solver Gurobi 6.02 ( Gurobi, 2014 ), where the real-valued optimal solution is provided as an initial
point. As shown in Table 9 , the rounding process provides a feasible integer-valued solution, which is sub-optimal, but very
close to the accurate optimal integer solution. There are two reasons for the sub-optimal solution: first, there are errors
in the approximation process, since we only choose the polynomial with a finite degree to approximate the original chance
constraints; second, only a simple B&B cutting process is performed to achieve the integer result. Although it is sub-optimal,
the error between the two objectives is only 3%. Thus, it is reasonable to believe that the approximation-based approach
could provide a reliable integer solution to the chance-constrained TFM problem, which is also confirmed by large-scale
problem simulations in Section 6.2 .
6.2. Large-scale ATFM simulation
This subsection presents a large-scale ATFM optimization, employing the proposed parallel computing framework. The
traffic data are extracted from the ASDI, which provides historical traffic data, as well as flight plans. A 2-h NAS-wide in-
stance is used, which represents the high-traffic period of a day, with 2326 paths and 3054 flights involved. The same
log-concave probability distribution in Section 6.1 is adopted and adjusted, according to the real-sector capacity (usually
10 to 15). The optimization is performed on a small Spark cluster with six nodes, where Spark is a distributed computing
platform ( Karau et al., 2015 ). Each node of the Spark cluster is a DELL workstation configured with an 8-processor CPU. All
workstations run UBUNTU 14.04 with Spark 1.3.1. The optimization subproblems were solved by calling Gurobi 6.0.2.
To further demonstrate that the approximation-based approach could provide a reliable solution, several large-scale ATFM
cases with different problem sizes are tested. Since the size of the ATFM problem is highly related to the number of sectors,
the simulation plans with various number of sectors are extracted from the 2-h NAS-wide instance above. Fig. 5 shows the
relative objective error between the approximation-based approach and the accurate optimal solution. The error gap is kept
below 5% with various number of sectors from 5 to 20, which confirmed that the quality of approximation-based solution is
also reliable for large-scale ATFM problems. Due to the exponentially growing complexity of the MILP method, we only test

J. Chen et al. / Transportation Research Part B 102 (2017) 124–141 139
5 10 15 200
0.5
1
1.5
2
2.5
3
3.5
4
4.5
5
rela
tive
err
or
%
number of sectors
Fig. 5. Relative error with different ATFM problem sizes.
up to 20 sectors. Actually, the approximation-based approach can handle large-scale problem with more than 20 sectors,
but it is difficult to get the accurate optimal solution for comparison.
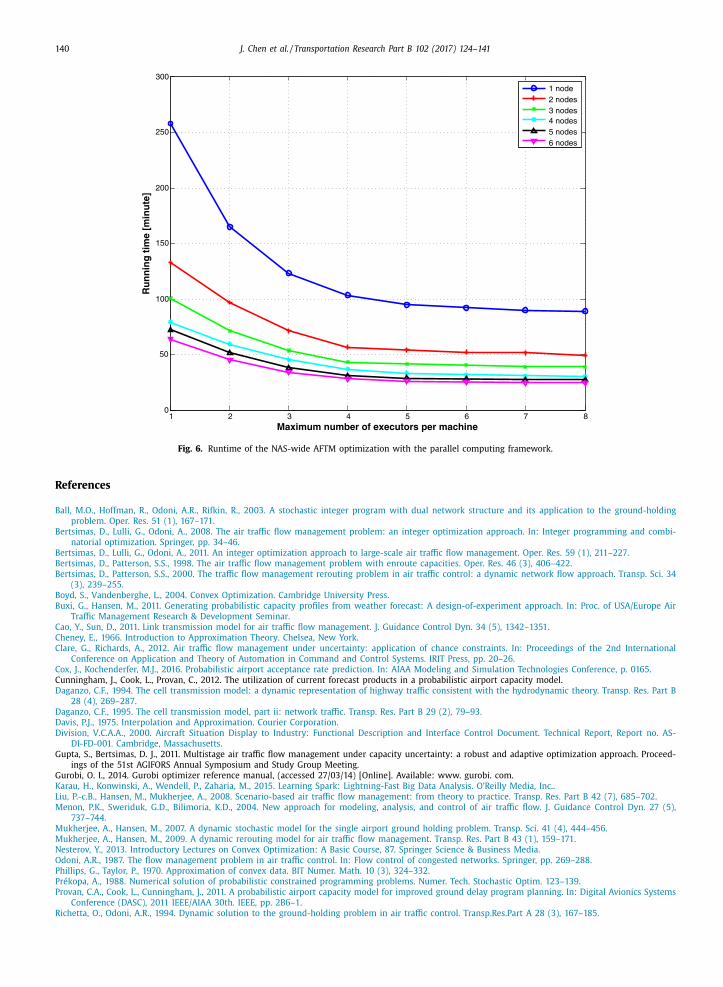
The running time of the optimization with different paralleling configurations is demonstrated in Fig. 6 . As a tuning
parameter to control the concurrency level, the maximum number of executors allowed on a node can be adjusted. Since the
8-processor CPU can handle 8 threads simultaneously, the maximum number of executors per machine can be up to eight.
The running time decreases when more executors are used for a fixed number of nodes. However, the speedup is not linear
and becomes less noticeable as the number of executors approaches 8. The reason is the increasing overhead for allocating
CPU time to the processors. Another speedup pattern can be observed as more nodes are launched. The speedup is also not
linear by the fact that it is more and more difficult to achieve further speedup as more nodes are deployed. The runtime is
reduced from 241 min with 1 nodes and 1 executor to 25 min with 6 nodes and 8 executors. The speedup increases about
tenfold, which is less than the theoretical 6 × 8 = 48 times. This is due to the increasing overhead for the synchronization
and communication between nodes, which is a common issue in parallel computing programming. Overall, it is clear that
the parallel computing framework, indeed, improves the computational efficiency of the polynomial approximation-based
approach.
7. Conclusions
This paper introduces a novel polynomial approximation-based chance-constrained optimization method to address un-
certainty in ATFM, which could provide a computationally efficient algorithm. Based on a previous deterministic Integer
Programming optimization model of ATFM, a chance-constrained model is developed to include probabilistic sector capac-
ity constraints. Then, a polynomial approximation-based approach is applied to efficiently solve such a large-scale chance-
constrained optimization problem. The approximation is based on the numerical properties of the Bernstein polynomial,
which is capable of effectively controlling the approximation error for both the function value and gradient. Thus, the
gradient mapping (a first-order algorithm) is adopted to obtain a satisfactory solution which is expected to be optimal.
Numerical results are reported to evaluate the polynomial approximation-based approach by comparing it with the brute-
force method, which demonstrates that the approximation-based approach could provide reliable solutions. Moreover, a dis-
tributed computing framework is designed based on the massive independent approximation processes in the polynomial
approximation-based approach, which is demonstrated with the ability to improve computational efficiency. This chance-
constrained optimization method and its computation platform are potentially helpful in their application to many domains
in air transportation. This method and platform are not only limited to ATFM, but can also be extended to airport surface
operations and airline management under uncertainties.
140 J. Chen et al. / Transportation Research Part B 102 (2017) 124–141
1 2 3 4 5 6 7 80
50
100
150
200
250
300
Ru
nn
ing
tim
e [m
inu
te]
Maximum number of executors per machine
1 node2 nodes3 nodes4 nodes5 nodes6 nodes
Fig. 6. Runtime of the NAS-wide AFTM optimization with the parallel computing framework.
References
Ball, M.O. , Hoffman, R. , Odoni, A.R. , Rifkin, R. , 2003. A stochastic integer program with dual network structure and its application to the ground-holdingproblem. Oper. Res. 51 (1), 167–171 .
Bertsimas, D. , Lulli, G. , Odoni, A. , 2008. The air traffic flow management problem: an integer optimization approach. In: Integer programming and combi-natorial optimization. Springer, pp. 34–46 .
Bertsimas, D. , Lulli, G. , Odoni, A. , 2011. An integer optimization approach to large-scale air traffic flow management. Oper. Res. 59 (1), 211–227 .
Bertsimas, D. , Patterson, S.S. , 1998. The air traffic flow management problem with enroute capacities. Oper. Res. 46 (3), 406–422 . Bertsimas, D. , Patterson, S.S. , 20 0 0. The traffic flow management rerouting problem in air traffic control: a dynamic network flow approach. Transp. Sci. 34
(3), 239–255 . Boyd, S. , Vandenberghe, L. , 2004. Convex Optimization. Cambridge University Press .
Buxi, G. , Hansen, M. , 2011. Generating probabilistic capacity profiles from weather forecast: A design-of-experiment approach. In: Proc. of USA/Europe AirTraffic Management Research & Development Seminar .
Cao, Y. , Sun, D. , 2011. Link transmission model for air traffic flow management. J. Guidance Control Dyn. 34 (5), 1342–1351 .
Cheney, E. , 1966. Introduction to Approximation Theory . Chelsea, New York. Clare, G. , Richards, A. , 2012. Air traffic flow management under uncertainty: application of chance constraints. In: Proceedings of the 2nd International
Conference on Application and Theory of Automation in Command and Control Systems. IRIT Press, pp. 20–26 . Cox, J. , Kochenderfer, M.J. , 2016. Probabilistic airport acceptance rate prediction. In: AIAA Modeling and Simulation Technologies Conference, p. 0165 .
Cunningham, J., Cook, L., Provan, C., 2012. The utilization of current forecast products in a probabilistic airport capacity model. Daganzo, C.F. , 1994. The cell transmission model: a dynamic representation of highway traffic consistent with the hydrodynamic theory. Transp. Res. Part B
28 (4), 269–287 .
Daganzo, C.F. , 1995. The cell transmission model, part ii: network traffic. Transp. Res. Part B 29 (2), 79–93 . Davis, P.J. , 1975. Interpolation and Approximation. Courier Corporation .
Division, V.C.A .A . , 20 0 0. Aircraft Situation Display to Industry: Functional Description and Interface Control Document. Technical Report, Report no. AS-DI-FD-001. Cambridge, Massachusetts .
Gupta, S., Bertsimas, D. J., 2011. Multistage air traffic flow management under capacity uncertainty: a robust and adaptive optimization approach. Proceed-ings of the 51st AGIFORS Annual Symposium and Study Group Meeting.
Gurobi, O. I., 2014. Gurobi optimizer reference manual, (accessed 27/03/14) [Online]. Available: www. gurobi. com.
Karau, H. , Konwinski, A. , Wendell, P. , Zaharia, M. , 2015. Learning Spark: Lightning-Fast Big Data Analysis. O’Reilly Media, Inc. . Liu, P.-c.B. , Hansen, M. , Mukherjee, A. , 2008. Scenario-based air traffic flow management: from theory to practice. Transp. Res. Part B 42 (7), 685–702 .
Menon, P.K. , Sweriduk, G.D. , Bilimoria, K.D. , 2004. New approach for modeling, analysis, and control of air traffic flow. J. Guidance Control Dyn. 27 (5),737–744 .
Mukherjee, A. , Hansen, M. , 2007. A dynamic stochastic model for the single airport ground holding problem. Transp. Sci. 41 (4), 4 4 4–456 . Mukherjee, A. , Hansen, M. , 2009. A dynamic rerouting model for air traffic flow management. Transp. Res. Part B 43 (1), 159–171 .
Nesterov, Y. , 2013. Introductory Lectures on Convex Optimization: A Basic Course, 87. Springer Science & Business Media .
Odoni, A.R. , 1987. The flow management problem in air traffic control. In: Flow control of congested networks. Springer, pp. 269–288 . Phillips, G. , Taylor, P. , 1970. Approximation of convex data. BIT Numer. Math. 10 (3), 324–332 .
Prékopa, A. , 1988. Numerical solution of probabilistic constrained programming problems. Numer. Tech. Stochastic Optim. 123–139 . Provan, C.A. , Cook, L. , Cunningham, J. , 2011. A probabilistic airport capacity model for improved ground delay program planning. In: Digital Avionics Systems
Conference (DASC), 2011 IEEE/AIAA 30th. IEEE, pp. 2B6–1 . Richetta, O. , Odoni, A.R. , 1994. Dynamic solution to the ground-holding problem in air traffic control. Transp.Res.Part A 28 (3), 167–185 .

J. Chen et al. / Transportation Research Part B 102 (2017) 124–141 141
Saumard, A. , Wellner, J.A. , 2014. Log-concavity and strong log-concavity: a review. Stat. Surv. 8, 45 . Shapiro, A. , Dentcheva, D. , et al. , 2014. Lectures on Stochastic Programming: Modeling and Theory, 16. SIAM .
Sridhar, B. , Grabbe, S.R. , Mukherjee, A. , 2008. Modeling and optimization in traffic flow management. Proc. IEEE 96 (12), 2060–2080 . Stewart, G. , 1993. Afternotes on Numerical Analysis. University of Maryland at College Park .
Sun, D. , Bayen, A.M. , 2008. Multicommodity eulerian-lagrangian large-capacity cell transmission model for en route traffic. J. Guidance Control Dyn. 31 (3),616–628 .
Sun, D. , Clinet, A. , Bayen, A.M. , 2011. A dual decomposition method for sector capacity constrained traffic flow optimization. Transp. Res. Part B 45 (6),
880–902 . Sun, D. , Sridhar, B. , Grabbe, S.R. , 2010. Disaggregation method for an aggregate traffic flow management model. J. Guidance Control Dyn. 33 (3), 666–676 .
Van der Vaart, A.W. , 20 0 0. Asymptotic Statistics, 3. Cambridge University Press . Volpe, N.T.C. , 20 0 0. Enhanced Traffic Management System (ETMS). Technical Report, Rep. VNTSC-DTS56-TMS-002. United States Department of Transporta-
tion, Cambridge, Massachusetts . Wei, P. , Cao, Y. , Sun, D. , 2013. Total unimodularity and decomposition method for large-scale air traffic cell transmission model. Transp. Res. Part B 53, 1–16 .