transductores y ultrasonidos
TRANSCRIPT

TRANSDUCTORES
DE
ULTRASONIDOS
Jose Mº Lorente Gassó
Transductores de Ultrasonidos
2
1.PRINCIPIOS BÁSICOS DE LOS ULTRASONIDOS .........................................................3
a.¿Qué son los Ultrasonidos?...................................3
b. Frecuencia, Periodo y Longitud de Onda..........3
c. Velocidad de Ultrasónidos y Longitud de Onda........................................................................................3
d. Propagación de ondas y movimiento de
partículas......................................................................3
e. Aplicando Ultrasonidos........................................4
f. Sensibilidad y Resolución.....................................4
2. DEFINICIONES AVAN- ZADAS.........................5
a. Forma de onda y espectro del transductor.........5
b. Impedancia acústica, reflectividad y
atenuación....................................................................5
c. Campo de sonido....................................................6
d. Otros parámetros de la emisión de sonido.........6
Diámetro del la emisión .......................................6
Zona de enfoque....................................................7
Dispersión de la emisión y semi-ángulo ............7
2. CARACTERÍSTICAS DE LOS TRANSDUCTORES .....................................................7
a. ¿Qué es un transductor ultrasónico?...................7
b. El elemento activo .................................................8
c. El apoyo...................................................................8
d. Placa protectora......................................................8
4. PRINCIPIOS DE LOS TRANSDUCTORES ESPECÍFICOS ................................................................8
a. Transductores de elemento dual ..........................8
b. Transductores de emisión angular ......................9
c. Transductores con línea de demora...................10
d. Transductores de inmersión ...............................10
Configuraciones de Enfoque .............................10
Variaciones de la Longitud de Enfoque debidas
a la Velocidad Acústica y a la Geometría de la Parte en Prueba ....................................................11
Ganancia de Enfoque..........................................11
Transductores de Onda Transversal de Incidencia Normal...............................................12
5. EXCITACIÓN DE TRANSDUCTORES ............12
6. APLICACIONES Y EJEMPLOS .........................13
a. Medidores de Nivel y Detección de Objetos...13
b. SONAR.................................................................13
c. Soldadura ...............................................................14
d. Limpieza ................................................................14
e. Ensayos No-Destructivos (NDT) ......................14
f. Uso Médico ...........................................................14
7. BIBLIOGRAFÍA / ENLACES ..............................14
Transductores de Ultrasonidos
3
1. PRINCIPIOS BÁSICOS DE LOS ULTRASONIDOS
a.¿Qué son los Ultrasonidos?.
Los sonidos generados por encima del rango percep-tible por el oído humano (típicamente 20 KHz) son
llamados Ultrasonidos. Sin embargo, el rango de frecuencias normalmente empleado en ensayos no
destructivos y en medidas de espesor es de 100 KHz a 500 MHz. Aunque los Ultrasonidos se comportan de manera similar al sonido audible, tienen una
longitud de onda muchísimo menor. Esto significa que puede ser reflejada por superficies extremada-
mente pequeñas como defectos en el interior de diversos materiales, lo que los hace muy apropiados para ensayos no destructivos sobre tales materiales.
El Espectro Acústico (fig 1) divide el sonido en 3
rangos de frecuencias. Los Ultrasonidos, a su vez, son divididos en 3 subconjuntos.
b. Frecuencia, Periodo y Longitud de
Onda.
Las vibraciones viajan en forma de onda, similar a la manera en que lo hace la luz. Sin embargo, al con-trario que las ondas de luz, que pueden viajar en el
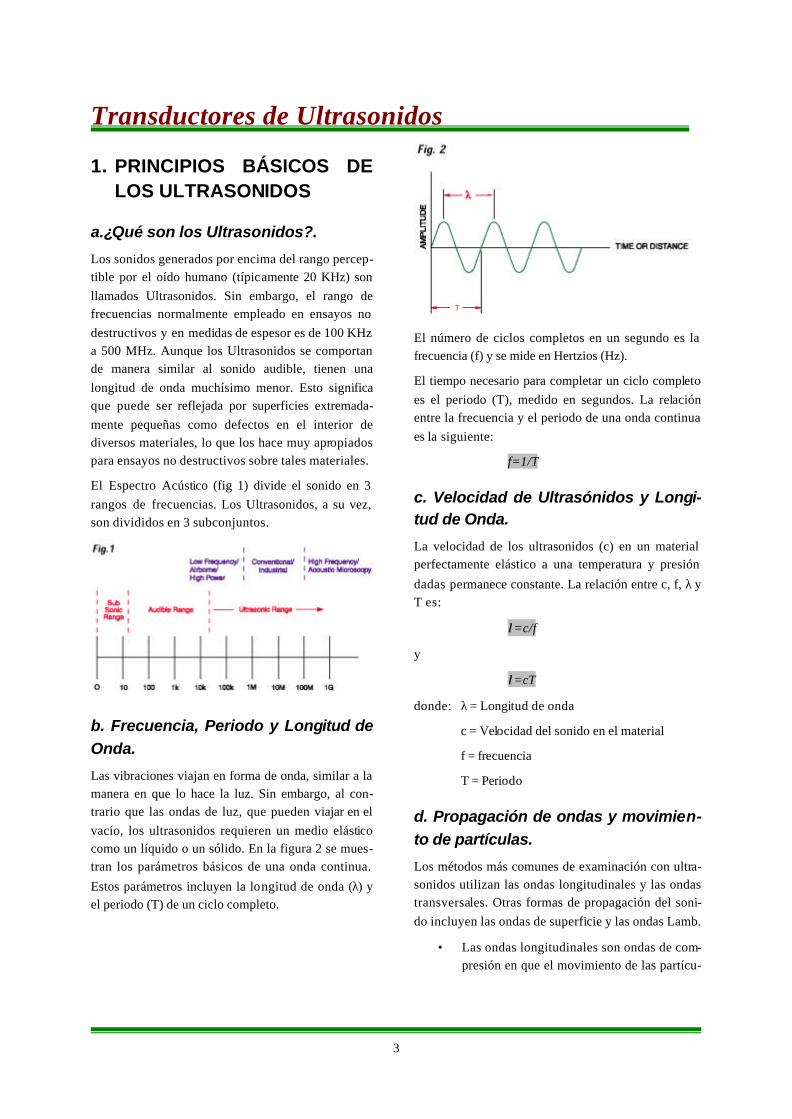
vacío, los ultrasonidos requieren un medio elástico como un líquido o un sólido. En la figura 2 se mues-tran los parámetros básicos de una onda continua.
Estos parámetros incluyen la longitud de onda (λ) y el periodo (T) de un ciclo completo.
El número de ciclos completos en un segundo es la frecuencia (f) y se mide en Hertzios (Hz).
El tiempo necesario para completar un ciclo completo
es el periodo (T), medido en segundos. La relación entre la frecuencia y el periodo de una onda continua
es la siguiente:
f=1/T
c. Velocidad de Ultrasónidos y Longi-tud de Onda.
La velocidad de los ultrasonidos (c) en un material perfectamente elástico a una temperatura y presión
dadas permanece constante. La relación entre c, f, λ y T es:
λ=c/f
y
λ=cT
donde: λ = Longitud de onda
c = Velocidad del sonido en el material
f = frecuencia
T = Periodo
d. Propagación de ondas y movimien-
to de partículas.
Los métodos más comunes de examinación con ultra-sonidos utilizan las ondas longitudinales y las ondas transversales. Otras formas de propagación del soni-
do incluyen las ondas de superficie y las ondas Lamb.
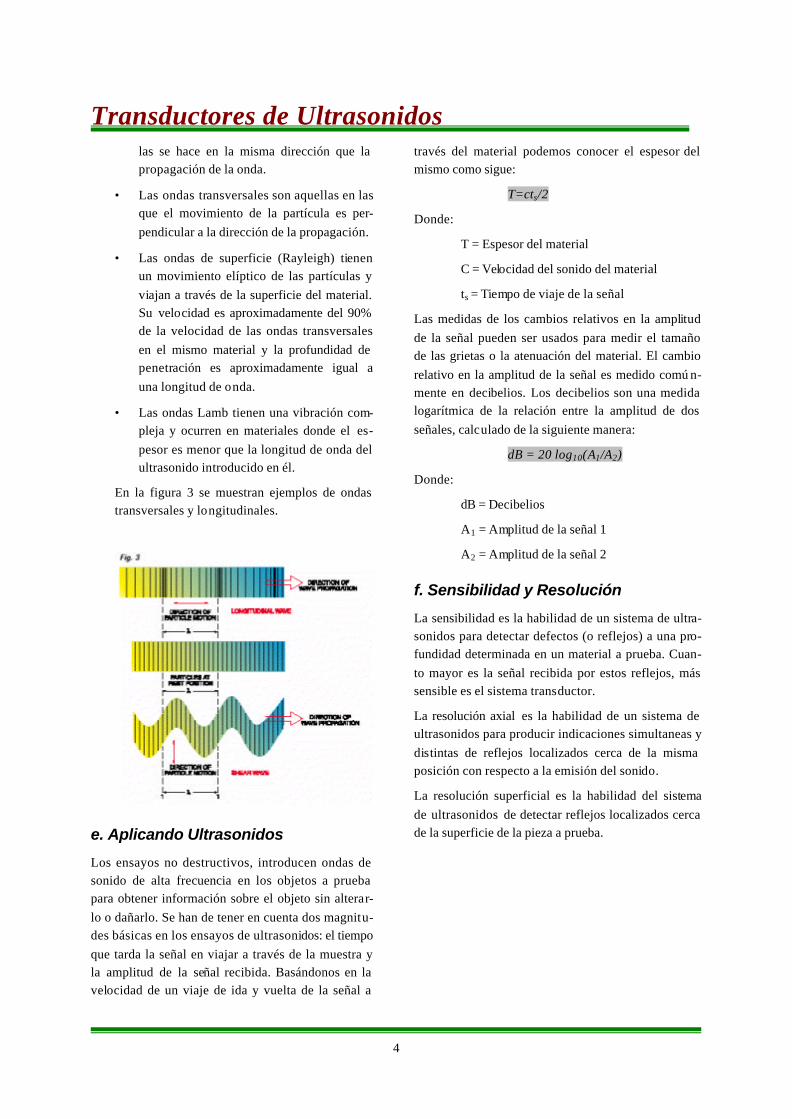
• Las ondas longitudinales son ondas de com-presión en que el movimiento de las partícu-
Transductores de Ultrasonidos
4
las se hace en la misma dirección que la propagación de la onda.
• Las ondas transversales son aquellas en las que el movimiento de la partícula es per-
pendicular a la dirección de la propagación.
• Las ondas de superficie (Rayleigh) tienen un movimiento elíptico de las partículas y
viajan a través de la superficie del material. Su velocidad es aproximadamente del 90% de la velocidad de las ondas transversales
en el mismo material y la profundidad de penetración es aproximadamente igual a
una longitud de onda.
• Las ondas Lamb tienen una vibración com-pleja y ocurren en materiales donde el es-
pesor es menor que la longitud de onda del ultrasonido introducido en él.
En la figura 3 se muestran ejemplos de ondas transversales y longitudinales.
e. Aplicando Ultrasonidos
Los ensayos no destructivos, introducen ondas de sonido de alta frecuencia en los objetos a prueba para obtener información sobre el objeto sin alterar-
lo o dañarlo. Se han de tener en cuenta dos magnitu-des básicas en los ensayos de ultrasonidos: el tiempo
que tarda la señal en viajar a través de la muestra y la amplitud de la señal recibida. Basándonos en la velocidad de un viaje de ida y vuelta de la señal a
través del material podemos conocer el espesor del mismo como sigue:
T=cts/2
Donde:
T = Espesor del material
C = Velocidad del sonido del material
ts = Tiempo de viaje de la señal
Las medidas de los cambios relativos en la amplitud
de la señal pueden ser usados para medir el tamaño de las grietas o la atenuación del material. El cambio
relativo en la amplitud de la señal es medido comú n-mente en decibelios. Los decibelios son una medida logarítmica de la relación entre la amplitud de dos
señales, calculado de la siguiente manera:
dB = 20 log10(A1/A2)
Donde:
dB = Decibelios
A1 = Amplitud de la señal 1
A2 = Amplitud de la señal 2
f. Sensibilidad y Resolución
La sensibilidad es la habilidad de un sistema de ultra-sonidos para detectar defectos (o reflejos) a una pro-fundidad determinada en un material a prueba. Cuan-
to mayor es la señal recibida por estos reflejos, más sensible es el sistema transductor.
La resolución axial es la habilidad de un sistema de ultrasonidos para producir indicaciones simultaneas y
distintas de reflejos localizados cerca de la misma posición con respecto a la emisión del sonido.
La resolución superficial es la habilidad del sistema
de ultrasonidos de detectar reflejos localizados cerca de la superficie de la pieza a prueba.
Transductores de Ultrasonidos
5
2. DEFINICIONES AVAN- ZA-DAS.
a. Forma de onda y espectro del transductor
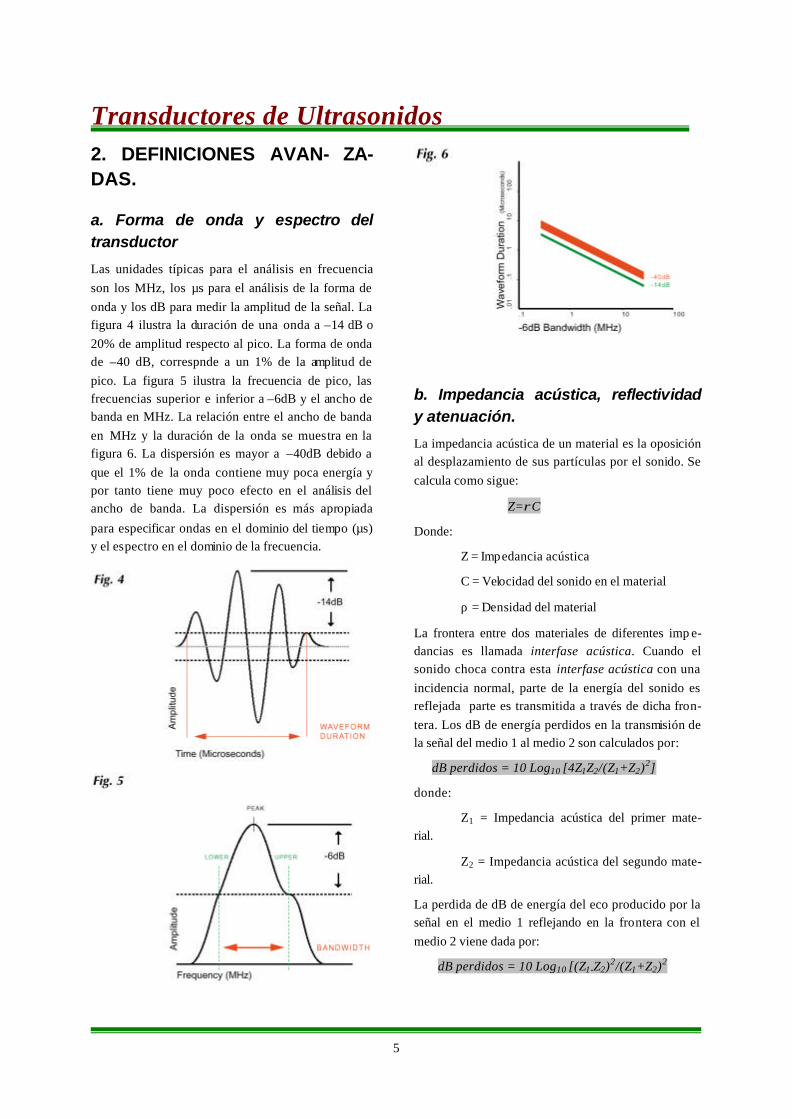
Las unidades típicas para el análisis en frecuencia
son los MHz, los µs para el análisis de la forma de
onda y los dB para medir la amplitud de la señal. La figura 4 ilustra la duración de una onda a –14 dB o
20% de amplitud respecto al pico. La forma de onda de –40 dB, correspnde a un 1% de la amplitud de
pico. La figura 5 ilustra la frecuencia de pico, las frecuencias superior e inferior a –6dB y el ancho de banda en MHz. La relación entre el ancho de banda
en MHz y la duración de la onda se muestra en la figura 6. La dispersión es mayor a –40dB debido a
que el 1% de la onda contiene muy poca energía y por tanto tiene muy poco efecto en el análisis del ancho de banda. La dispersión es más apropiada
para especificar ondas en el dominio del tiempo (µs) y el espectro en el dominio de la frecuencia.
b. Impedancia acústica, reflectividad y atenuación.
La impedancia acústica de un material es la oposición al desplazamiento de sus partículas por el sonido. Se
calcula como sigue:
Z=ρC
Donde:
Z = Impedancia acústica
C = Velocidad del sonido en el material
ρ = Densidad del material
La frontera entre dos materiales de diferentes imp e-dancias es llamada interfase acústica. Cuando el sonido choca contra esta interfase acústica con una
incidencia normal, parte de la energía del sonido es reflejada parte es transmitida a través de dicha fron-
tera. Los dB de energía perdidos en la transmisión de la señal del medio 1 al medio 2 son calculados por:
dB perdidos = 10 Log10 [4Z1Z2/(Z1+Z2)2]
donde:
Z1 = Impedancia acústica del primer mate-rial.
Z2 = Impedancia acústica del segundo mate-rial.
La perdida de dB de energía del eco producido por la señal en el medio 1 reflejando en la frontera con el
medio 2 viene dada por:
dB perdidos = 10 Log10 [(Z1-Z2)2/(Z1+Z2)2
Transductores de Ultrasonidos
6
Por ejemplo: Los dB perdidos en la transmisión del agua (Z = 1,48) al acero (Z=45,41) es de –9,13dB; esta perdida es la misma que transmitiendo desde el
acero al agua. Los dB perdidos por el eco del acero en el agua son –0,57dB, lo mismo que si se transmi-
tiera del acero al agua. La onda del eco es invertida cuando Z2<Z1.
Por último, los ultrasonidos se atenúan progresiva-
mente a través del medio de transmisión. Asumien-do que no hay reflexiones importantes, existen 3 causas de atenuación diferentes: difracción, disper-
sión y absorción. El total de atenuación a través de un material puede jugar un importante papel en la
selección de un transductor determinado para una aplicación.
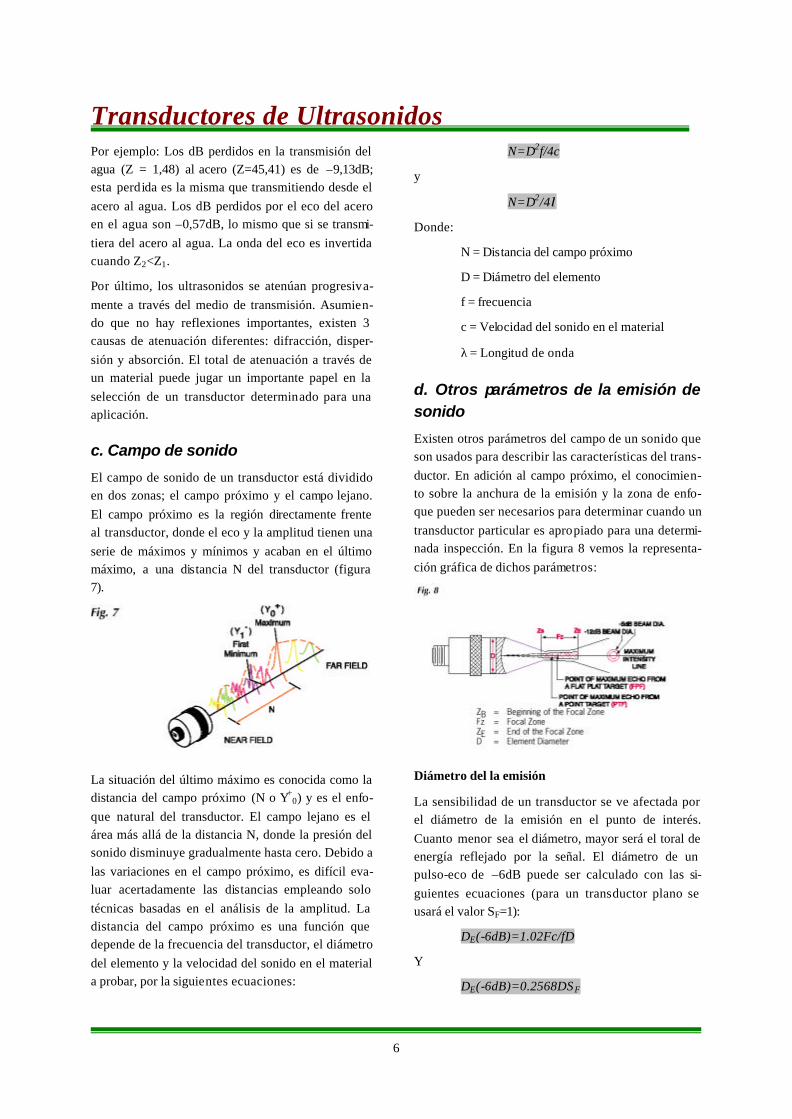
c. Campo de sonido
El campo de sonido de un transductor está dividido en dos zonas; el campo próximo y el campo lejano.
El campo próximo es la región directamente frente al transductor, donde el eco y la amplitud tienen una
serie de máximos y mínimos y acaban en el último máximo, a una distancia N del transductor (figura 7).
La situación del último máximo es conocida como la distancia del campo próximo (N o Y+
0) y es el enfo-
que natural del transductor. El campo lejano es el área más allá de la distancia N, donde la presión del sonido disminuye gradualmente hasta cero. Debido a
las variaciones en el campo próximo, es difícil eva-luar acertadamente las distancias empleando solo
técnicas basadas en el análisis de la amplitud. La distancia del campo próximo es una función que depende de la frecuencia del transductor, el diámetro
del elemento y la velocidad del sonido en el material a probar, por la siguientes ecuaciones:
N=D2f/4c
y
N=D2/4λ
Donde:
N = Distancia del campo próximo
D = Diámetro del elemento
f = frecuencia
c = Velocidad del sonido en el material
λ = Longitud de onda
d. Otros parámetros de la emisión de sonido
Existen otros parámetros del campo de un sonido que son usados para describir las características del trans-
ductor. En adición al campo próximo, el conocimien-to sobre la anchura de la emisión y la zona de enfo-que pueden ser necesarios para determinar cuando un
transductor particular es apropiado para una determi-nada inspección. En la figura 8 vemos la representa-
ción gráfica de dichos parámetros:
Diámetro del la emisión
La sensibilidad de un transductor se ve afectada por el diámetro de la emisión en el punto de interés.
Cuanto menor sea el diámetro, mayor será el toral de energía reflejado por la señal. El diámetro de un pulso-eco de –6dB puede ser calculado con las si-
guientes ecuaciones (para un transductor plano se usará el valor SF=1):
DE(-6dB)=1.02Fc/fD
Y
DE(-6dB)=0.2568DSF
Transductores de Ultrasonidos
7
Donde:
DE = Diámetro de la emisión
F = Longitud del foco
c = Velocidad del sonido en el material
D = Diámetro del elemento
SF = Longitud del foco normalizada
Zona de enfoque
Los puntos de comienzo y fin de la zona focal están localizados donde la amplitud de la señal pulso-eco axial cae a –6dB de la amplitud en el punto de enfo-
que. La longitud de la zona de enfoque está dada por la siguiente ecuación:
Fz=N*SF2[2/1+0,5SF)]
Donde:
Fz = Zona focal
N = Campo próximo
SF = Longitud del foco normalizada
La figura 9 muestra el punto de comienzo (SB) y
final (SE) de la zona focal de –6dB respecto el factor de enfoque.
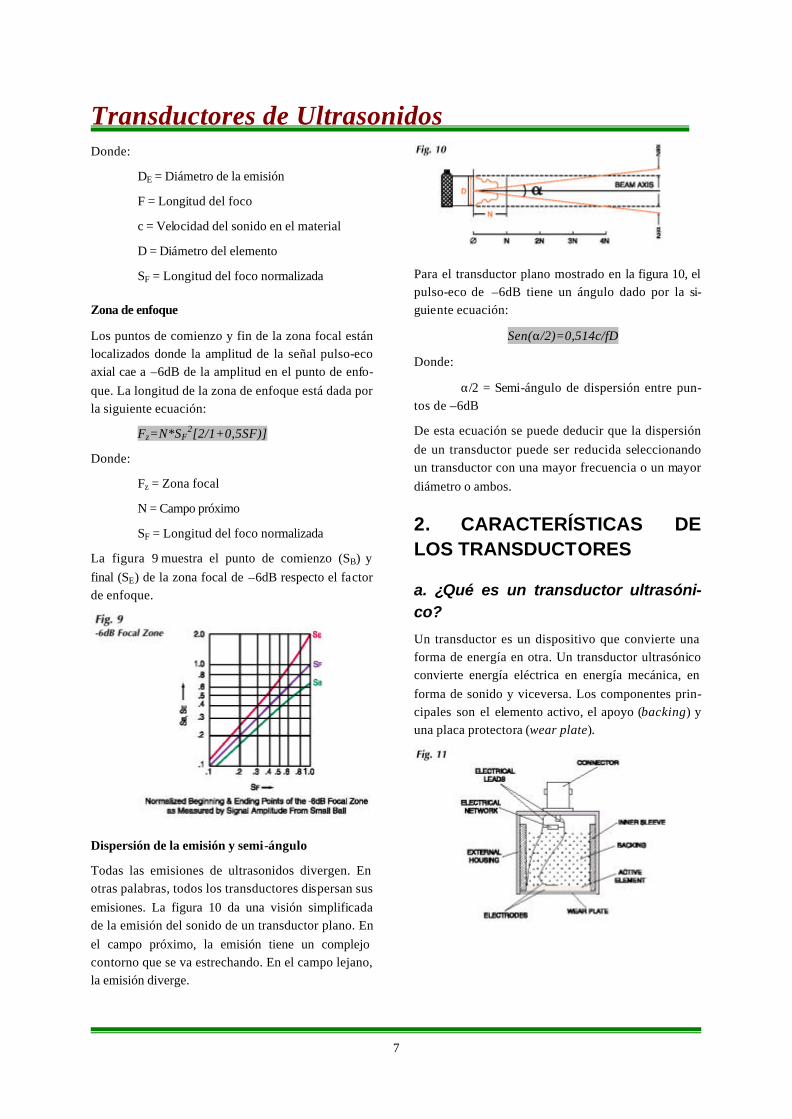
Dispersión de la emisión y semi-ángulo
Todas las emisiones de ultrasonidos divergen. En otras palabras, todos los transductores dispersan sus
emisiones. La figura 10 da una visión simplificada de la emisión del sonido de un transductor plano. En
el campo próximo, la emisión tiene un complejo contorno que se va estrechando. En el campo lejano, la emisión diverge.
Para el transductor plano mostrado en la figura 10, el pulso-eco de –6dB tiene un ángulo dado por la si-guiente ecuación:
Sen(α/2)=0,514c/fD
Donde:
α/2 = Semi-ángulo de dispersión entre pun-tos de –6dB
De esta ecuación se puede deducir que la dispersión
de un transductor puede ser reducida seleccionando un transductor con una mayor frecuencia o un mayor
diámetro o ambos.
2. CARACTERÍSTICAS DE LOS TRANSDUCTORES
a. ¿Qué es un transductor ultrasóni-co?
Un transductor es un dispositivo que convierte una forma de energía en otra. Un transductor ultrasónico convierte energía eléctrica en energía mecánica, en
forma de sonido y viceversa. Los componentes prin-cipales son el elemento activo, el apoyo (backing) y una placa protectora (wear plate).
Transductores de Ultrasonidos
8
b. El elemento activo
El elemento activo, es un material piezo o ferroeléc-trico, que convierte la energía eléctrica de un pulso de excitación en energía ultrasónica.
Los materiales usados comúnmente son cerámicas
polarizadas que son cortadas en numerosas maneras para producir diferentes formas de onda. Actualmen-te se están utilizando nuevos materiales como piezo-
polímeros y compuestos.
Hojas de datos de materiales piezoeléctricos: Des-cripción de diversos materiales piezoeléctricos del
catálogo de PHILIPS ®, donde podemos ver las características mecánicas, las tensiones de trabajo y
el rango de temperaturas.
Hojas de datos de elementos: Descripción de diver-sos elementos activos, del catálogo de PHILIPS ®,donde se describen las geometrías, capacitancias,
etc
Descripción del funcionamiento de los materiales piezoeléctricos: Teoría de los mismos descrita desde
el nivel molecular de los cristales cerámicos y como se genera la vibración mecánica que genera los pul-sos ultrasónicos.
c. El apoyo
El apoyo es usualmente un fuerte atenuador, un material de alta densidad usado para controlar las vibraciones del transductor absorbiendo la energía
radiada por la cara trasera del elemento activo. Cuando la impedancia acústica del apoyo se iguala
con la impedancia acústica del elemento activo, el resultado será un transductor fuertemente amorti-guado, con un buen rango de resolución pero con
una baja amplitud de señal. Si existe diferencia entre la impedancia acústica del elemento activo y el
apoyo, mayor energía de sonido será emitida hacia el material en prueba. Este último resultado será un transductor con menor resolución debido a la mayor
duración de la onda, pero con una mayor amplitud de señal o sensibilidad.
d. Placa protectora
El propósito básico de la placa protectora es prote-ger el elemento transductor del entorno. En el caso
de transductores de contacto, la placa protectora debe ser duradera y resistente a la corrosión.
Para algunos transductores, como los de inmersión,
los de emisión angular (angle beam) y los de línea de demora (delay line), la placa protectora tiene el pro-pósito adicional de servir de transformador acústico
entre la alta imp edancia acústica del elemento activo y el agua, la cuña (wedge) o la línea de demora (delay
line). Esto se consigue seleccionando una capa de un
espesor de ¼ de la longitud de onda emitida (λ/4) y
de la deseada impedancia acústica (el elemento activo es nominalmente de ½ de longitud de onda). La elec-ción de la superficie de la placa estará basada en la
idea de la superposición, que permite que las ondas generadas por el elemento activo estén en fase con la
onda reverberando en la capa de unión.
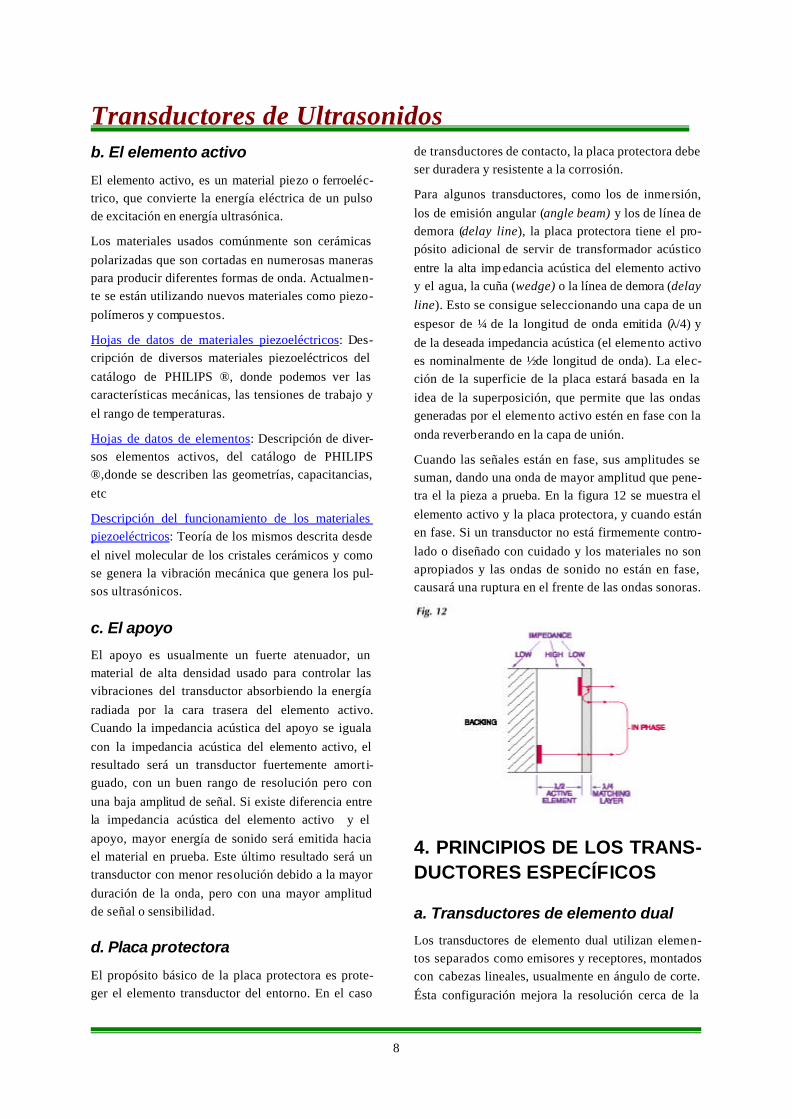
Cuando las señales están en fase, sus amplitudes se suman, dando una onda de mayor amplitud que pene-tra el la pieza a prueba. En la figura 12 se muestra el
elemento activo y la placa protectora, y cuando están en fase. Si un transductor no está firmemente contro-
lado o diseñado con cuidado y los materiales no son apropiados y las ondas de sonido no están en fase, causará una ruptura en el frente de las ondas sonoras.
4. PRINCIPIOS DE LOS TRANS-DUCTORES ESPECÍFICOS
a. Transductores de elemento dual
Los transductores de elemento dual utilizan elemen-tos separados como emisores y receptores, montados con cabezas lineales, usualmente en ángulo de corte.
Ésta configuración mejora la resolución cerca de la
Transductores de Ultrasonidos
9
superficie eliminado los problemas de recuperación del golpe sonoro principal. Adicionalmente, el dis e-ño de emisores cruzados, provee de un seudo-foco
que hace a los elementos duales más sensibles a los ecos de reflectantes irregulares como la corrosión o
superficies rugosas.
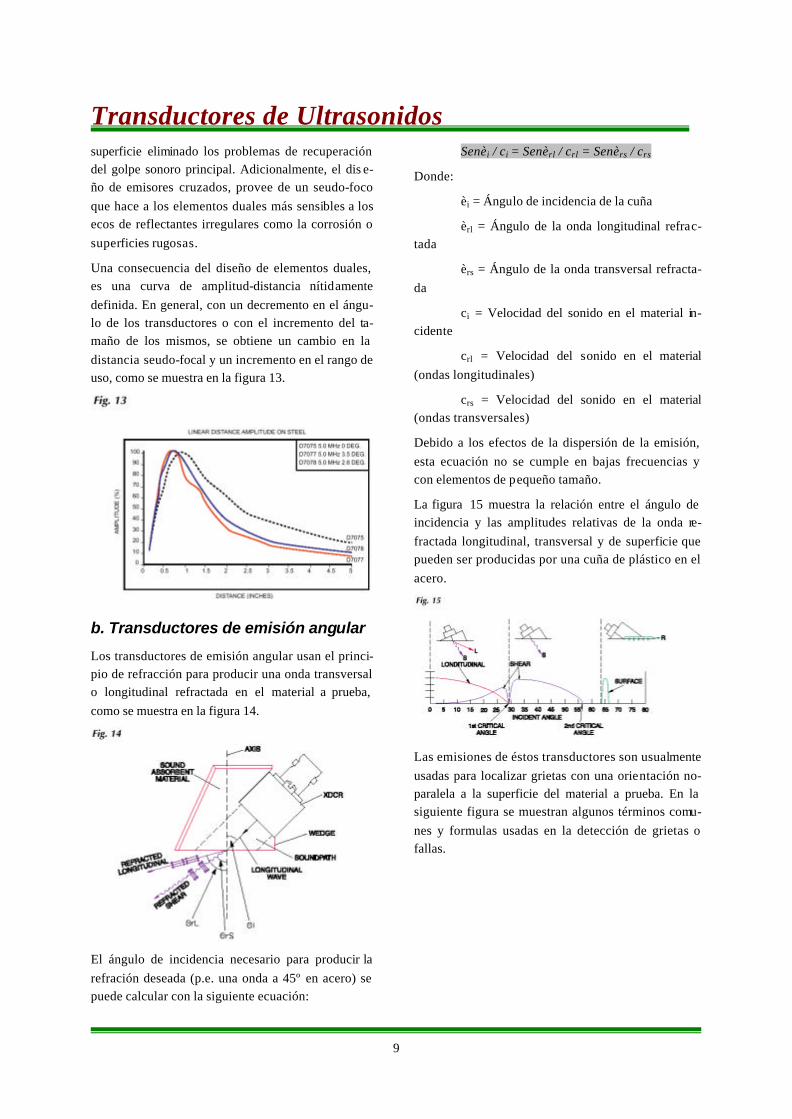
Una consecuencia del diseño de elementos duales, es una curva de amplitud-distancia nítidamente
definida. En general, con un decremento en el ángu-lo de los transductores o con el incremento del ta-maño de los mismos, se obtiene un cambio en la
distancia seudo-focal y un incremento en el rango de uso, como se muestra en la figura 13.
b. Transductores de emisión angular
Los transductores de emisión angular usan el princi-pio de refracción para producir una onda transversal o longitudinal refractada en el material a prueba,
como se muestra en la figura 14.
El ángulo de incidencia necesario para producir la
refración deseada (p.e. una onda a 45º en acero) se puede calcular con la siguiente ecuación:
Senèi / ci = Senèrl / crl = Senèrs / crs
Donde:
èi = Ángulo de incidencia de la cuña
èrl = Ángulo de la onda longitudinal refrac-tada
èrs = Ángulo de la onda transversal refracta-
da
ci = Velocidad del sonido en el material in-cidente
crl = Velocidad del sonido en el material
(ondas longitudinales)
crs = Velocidad del sonido en el material (ondas transversales)
Debido a los efectos de la dispersión de la emisión,
esta ecuación no se cumple en bajas frecuencias y con elementos de pequeño tamaño.
La figura 15 muestra la relación entre el ángulo de incidencia y las amplitudes relativas de la onda re-
fractada longitudinal, transversal y de superficie que pueden ser producidas por una cuña de plástico en el
acero.
Las emisiones de éstos transductores son usualmente
usadas para localizar grietas con una orientación no-paralela a la superficie del material a prueba. En la siguiente figura se muestran algunos términos comu-
nes y formulas usadas en la detección de grietas o fallas.

Transductores de Ultrasonidos
10
c. Transductores con línea de demo-
ra
Los transductores con línea de demora tienen un único elemento de onda longitudinal en conjunto con una línea de demora reemplazable (placa pro-
tectora).
Una de las razones para elegir estos transductores, es que cerca de la superficie, la resolución puede ser
mejorada. La línea de demora permite que el ele-mento deje de vibrar antes de que la señal de vuelta reflejada sea recibida. Cuando se usa un transductor
con línea de demora, se reciben múltiples ecos desde el extremo de la línea y es importante tener esto en
cuenta.
Otro uso de los transductores de demora son las aplicaciones en las que el material a prueba está a una temperatura elevada.
d. Transductores de inmersión
Los transductores de inmersión ofrecen principal-mente tres ventajas sobre los transductores de con-tacto:
• El acoplamiento uniforme reduce las varia-
ciones de sensibilidad.
• La reducción del tiempo de escaneo.
• El enfoque de los transductores de inmersión incrementa la sensibilidad de los pequeños reflectantes.
Configuraciones de Enfoque
Los transductores de inmersión están disponibles en tres configuraciones diferentes: sin enfoque (“pla-
nos”), de enfoque esférico (“punto”) y de enfoque cilíndrico (“línea”). El enfoque es consigue mediante lentes o curvando el propio elemento. La adición de
lentes es la manera más común de realizar el enfoque de un transductor.
Un transductor no enfocado puede ser usado en apli-
caciones generales o para penetrar en materiales delgados. Los transductores de enfoque esférico son
comúnmente usados para mejorar la sensibilidad de pequeñas grietas y los de enfoque cilíndrico son usa-dos típicamente para la inspección de tuberías. En la
figura 17 se muestran ejemplos de enfoques esférico y cilíndrico.
Por definición, la longitud de enfoque de un transduc-tor es la distancia hasta el punto donde está localizada
la máxima amplitud de la señal ultrasónica. En un transductor sin enfoque esta distancia es aproxima-damente equivalente al campo de enfoque cercano.
Debido a que el último máximo de la señal ocurre a una distancia equivalente al campo de enfoque cerca-
no, un transductor, por definición no puede ser acús-ticamente enfocado a una distancia mayor que su campo cercano.
Cuando se enfoca un transductor, el tipo de enfoque
(esférico o cilíndrico), la longitud de enfoque, y el tipo de objetivo (un punto o una superficie plana),
Transductores de Ultrasonidos
11
necesitan ser especificados. Basándose en esta in-formación, puede calcularse la curvatura de la lente necesaria. En pruebas, la medida de la longitud de
enfoque debe estar fuera del objetivo a medir.
Hay limitaciones respecto a las longitudes de enfo-que para transductores de determinadas frecuencias
y diámetros del elemento combinados con diferentes tipos de objetivos. La máxima longitud de enfoque
para un objetivo determinado es 0,8 * Y+0 (Longitud
del Campo Cercano). Los transductores con longi-tudes de enfoque por encima de estos máximos, pero
por debajo de la longitud del campo cercano, son llamados unidades de enfoque débil. Adicionalmen-
te a las limitaciones a la máxima longitud de enfo-que, existen limitaciones a la mínima distancia de enfoque. Éstas limitaciones son típicamente debidas
a limitaciones mecánicas del propio transductor.
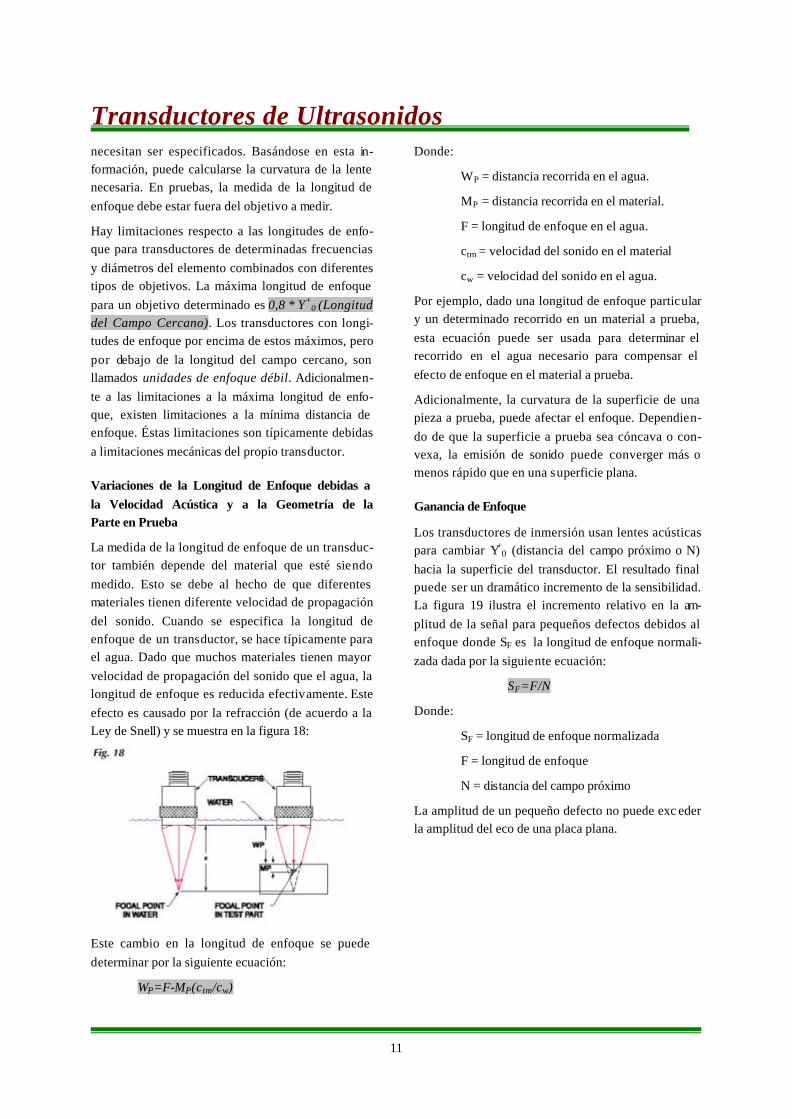
Variaciones de la Longitud de Enfoque debidas a
la Velocidad Acústica y a la Geometría de la Parte en Prueba
La medida de la longitud de enfoque de un transduc-tor también depende del material que esté siendo
medido. Esto se debe al hecho de que diferentes materiales tienen diferente velocidad de propagación
del sonido. Cuando se especifica la longitud de enfoque de un transductor, se hace típicamente para el agua. Dado que muchos materiales tienen mayor
velocidad de propagación del sonido que el agua, la longitud de enfoque es reducida efectivamente. Este
efecto es causado por la refracción (de acuerdo a la Ley de Snell) y se muestra en la figura 18:
Este cambio en la longitud de enfoque se puede
determinar por la siguiente ecuación:
WP=F-MP(ctm/cw)
Donde:
WP = distancia recorrida en el agua.
MP = distancia recorrida en el material.
F = longitud de enfoque en el agua.
ctm = velocidad del sonido en el material
cw = velocidad del sonido en el agua.
Por ejemplo, dado una longitud de enfoque particular y un determinado recorrido en un material a prueba,
esta ecuación puede ser usada para determinar el recorrido en el agua necesario para compensar el
efecto de enfoque en el material a prueba.
Adicionalmente, la curvatura de la superficie de una pieza a prueba, puede afectar el enfoque. Dependien-
do de que la superficie a prueba sea cóncava o con-vexa, la emisión de sonido puede converger más o menos rápido que en una superficie plana.
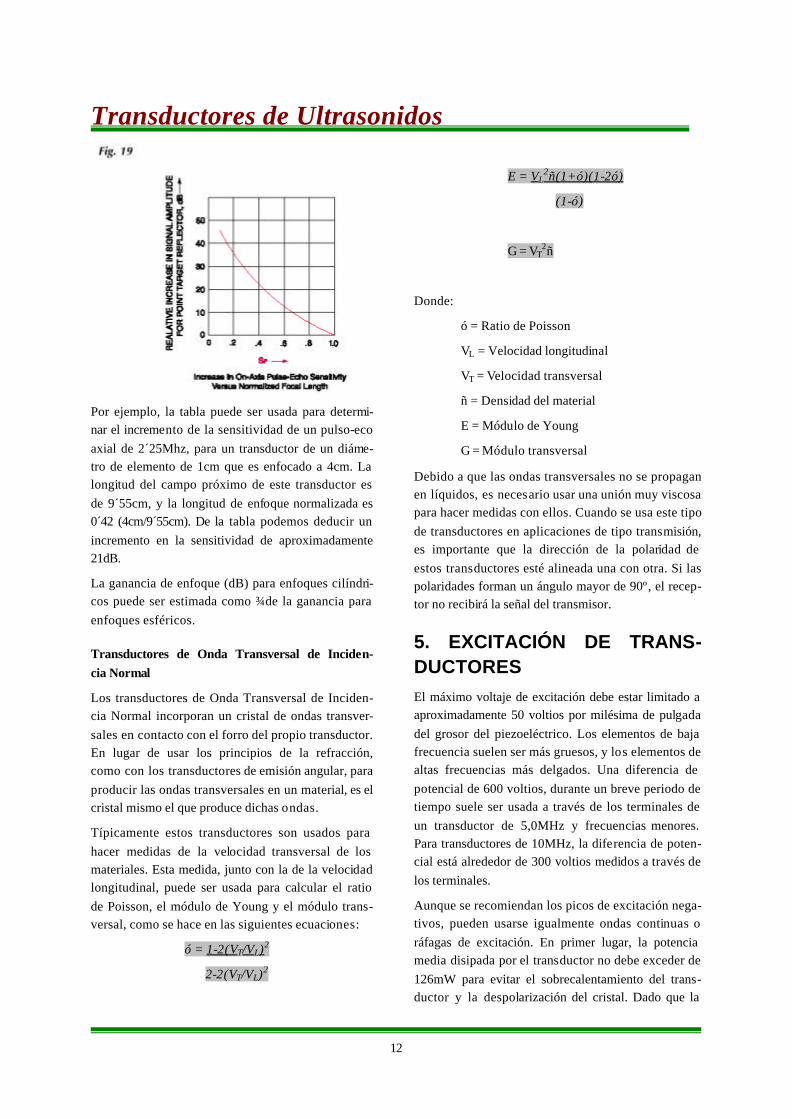
Ganancia de Enfoque
Los transductores de inmersión usan lentes acústicas para cambiar Y+
0 (distancia del campo próximo o N)
hacia la superficie del transductor. El resultado final puede ser un dramático incremento de la sensibilidad. La figura 19 ilustra el incremento relativo en la am-
plitud de la señal para pequeños defectos debidos al enfoque donde SF es la longitud de enfoque normali-
zada dada por la siguiente ecuación:
SF=F/N
Donde:
SF = longitud de enfoque normalizada
F = longitud de enfoque
N = distancia del campo próximo
La amplitud de un pequeño defecto no puede exc eder la amplitud del eco de una placa plana.
Transductores de Ultrasonidos
12
Por ejemplo, la tabla puede ser usada para determi-nar el incremento de la sensitividad de un pulso-eco
axial de 2´25Mhz, para un transductor de un diáme-tro de elemento de 1cm que es enfocado a 4cm. La longitud del campo próximo de este transductor es
de 9´55cm, y la longitud de enfoque normalizada es 0´42 (4cm/9´55cm). De la tabla podemos deducir un
incremento en la sensitividad de aproximadamente 21dB.
La ganancia de enfoque (dB) para enfoques cilíndri-cos puede ser estimada como ¾ de la ganancia para
enfoques esféricos.
Transductores de Onda Transversal de Inciden-
cia Normal
Los transductores de Onda Transversal de Inciden-cia Normal incorporan un cristal de ondas transver-
sales en contacto con el forro del propio transductor. En lugar de usar los principios de la refracción, como con los transductores de emisión angular, para
producir las ondas transversales en un material, es el cristal mismo el que produce dichas ondas.
Típicamente estos transductores son usados para
hacer medidas de la velocidad transversal de los materiales. Esta medida, junto con la de la velocidad longitudinal, puede ser usada para calcular el ratio
de Poisson, el módulo de Young y el módulo trans-versal, como se hace en las siguientes ecuaciones:
ó = 1-2(V T/V L)2
2-2(VT/VL)2
E = V L2ñ(1+ó)(1-2ó)
(1-ó)
G = VT2ñ
Donde:
ó = Ratio de Poisson
VL = Velocidad longitudinal
VT = Velocidad transversal
ñ = Densidad del material
E = Módulo de Young
G = Módulo transversal
Debido a que las ondas transversales no se propagan en líquidos, es necesario usar una unión muy viscosa para hacer medidas con ellos. Cuando se usa este tipo
de transductores en aplicaciones de tipo transmisión, es importante que la dirección de la polaridad de
estos transductores esté alineada una con otra. Si las polaridades forman un ángulo mayor de 90º, el recep-tor no recibirá la señal del transmisor.
5. EXCITACIÓN DE TRANS-DUCTORES
El máximo voltaje de excitación debe estar limitado a aproximadamente 50 voltios por milésima de pulgada
del grosor del piezoeléctrico. Los elementos de baja frecuencia suelen ser más gruesos, y los elementos de altas frecuencias más delgados. Una diferencia de
potencial de 600 voltios, durante un breve periodo de tiempo suele ser usada a través de los terminales de
un transductor de 5,0MHz y frecuencias menores. Para transductores de 10MHz, la diferencia de poten-cial está alrededor de 300 voltios medidos a través de
los terminales.
Aunque se recomiendan los picos de excitación nega-tivos, pueden usarse igualmente ondas continuas o
ráfagas de excitación. En primer lugar, la potencia media disipada por el transductor no debe exceder de
126mW para evitar el sobrecalentamiento del trans-ductor y la despolarización del cristal. Dado que la
Transductores de Ultrasonidos
13
potencia media depende de cierto número de facto-res como el voltaje, el ciclo útil de funcionamiento y la impedancia eléctrica del elemento, se pueden usar
las siguientes ecuaciones para estimar la duración de la excitación máxima, así como el número de ciclos
de una ráfaga para mantenerse dentro de las limita-ciones máximas de potencia:
Vrms = ½(0,707)Vp-p
Ptot = (CUF)(Vrms)2cos(ö)/ Z
Craf = fCUF/Trep
Donde:
Vp-p = Voltaje de pico a pico
Ptot = Potencia total
Craf =Ciclos de ráfaga
CUF = Ciclos de funcionamiento útil
Trep =Tasa de repetición
ö = Fase del ángulo
El siguiente ejemplo muestra el uso de las ecuacio-nes anteriores, para el transductor V310-SU de Pa-
nametrics, Inc ®:
V310-SU: 5.0MHz, 0.635 cm de diámetro del ele-mento, no enfocado.
Asumiendo: 100V de pico a pico 50Ù de impedancia nominal de entrada
(Nota: este valor puede variar de trans-ductor a transductor y debe ser medida),
ö = -45º y 5KHz de Trep.
Paso 1: Calculo de Vrms
Vrms = ½(0.707)Vp-p
Vrms = ½ (0.707)(100) = 35.35V
Paso 2: Reordenamos la 2ª ecuación para resolver los Ciclos de funcionamiento útil. Usa-remos 0.125mW como Ptot, que es la po-
tencia máxima recomendada para cual-quier transductor.
CUF = Z*Ptot/(Vrms2)cos(ö) =
(50)(0.125)/(35.35)2(cos 45º) = 0.007s/s Esto significa 7 milisegundos de excita-
ción cada 1000ms.
Paso 3: El nº de ciclos en la ráfaga puede ser ahora calculada por la última ecuación:
Craf = (F)(CUF)/Trep = (5*106)*(0.007)/5*103 Craf = 7
6. APLICACIONES Y EJEMPLOS
a. Medidores de Nivel y Detección de Objetos
Los ultrasonidos son muy prácticos para medir nive-les de materiales donde otros sensores no pueden actuar, como en ambientes con polvo o vapores, o
incluso objetos transparentes, donde los sensores fotoeléctricos no pueden actuar. Así se pueden em-plear para medir silos de grano o arena, para determi-
nar la altura de líquido en depósitos o calcular la altura de diversos objetos.
Ejemplos:
Detector de nivel hasta 3m (KAB Instruments)
Medidores de nivel (KAB Instruments)
Hoja de características del "sm602": Transductor de
SUPERPROX ® de 500KHz, para medición de nive-les y detección de objetos.
Hoja de características del "sm906": Transductor de
SUPERPROX ®.
Datos del G-170710: Transductor de FESTO DI-DACTIC ®, de 40KHz de frecuencia de trabajo.
Especificaciones del Q45UR: Transductor de BAN-
NER ®, para detección de proximidad (de 50-250mm).
Ultrasound Research Center: Transductores que ope-
ran en la gama de 4-7MHz.
b. SONAR
SONAR es el acrónimo inglés de SOund NAvigation and Ranging, y con ella se hace referencia al método
y al equipo necesario para determinar por medio del
sonido la presencia, localización o naturaleza de objetos en el mar.
Tanto en el aire como en el vacío se utiliza la radia-
ción electromagnética, pero este tipo de radiación no es eficaz en el agua porque el medio acuático es un
excelente conductor eléctrico, por lo cual se produce
Transductores de Ultrasonidos
14
una rápida transformación de la energía del campo eléctrico provocando una atenuación mucho mayor que la radiación acústica de naturaleza mecánica.
Para una frecuencia de 1 Khz. la pérdida es de 1428 dB/Km., mientras que la atenuación de la energía
acústica es de 0,06 dB/Km. para la misma frecuen-cia. Cabría la posibilidad de usar radiación electro-magnética de frecuencia muy baja para conseguir
una menor atenuación, pero presenta inconvenientes importantes debido a la gran cantidad de potencia
que se debe suministrar al transmisor, a la necesidad de antenas de cientos de Kms. de longitud y a la pobre resolución.
El término SONAR no solo designa aquellos senso-res que usan el agua como medio de transmisión, sino que éste puede ser también un medio aéreo.
Wirz Electronics Polaroid Sonar Kit: SONAR de
medición de distancias y detección de objetos, para su uso en robótica.
Hoja de características del modelo 6500 de Polaroid,
rango de frecuencias 20-100KHz.
Construcción de un SONAR de detección de distan-cias: Esquemas para construir un SONAR con un par de transductores y un PIC, así como unos cuan-
tos componentes simples. Se incluye código ensam-blador para el PIC.
c. Soldadura
Otro de los usos de los ultrasonidos, es la soldadura de materiales plásticos.
Transductores ultrasónicos para soldadura: Datos de ILSAN SUNTEK ®, con frecuencias de trabajo de
15-40KHz.
d. Limpieza
Los ultrasonidos se suelen usar también en la elimi-nación de polvo y grasa de objetos como piezas
mecánicas, joyería, etc evitando productos dañinos como sosa o ácidos.
Tanques de limpieza: Ejemplo de un tanque de lim-pieza de L&R con ultrasonidos, aunque con poca
información técnica.
e. Ensayos No-Destructivos (NDT)
Los NDT (Non Destructive Test) o Ensayos No-Destructivos, son otra de las principales aplicaciones de los ultrasonidos. Gracias a la capacidad de las
ondas sonoras de propagarse a través de medios elás-ticos, son especialmente apropiadas para el examen de cuerpos sólidos para la detección de defectos de
fabricación, grietas o fisuras, daños en los cimientos y estructura de los edificios, etc.
Catálogo de PANAMETRICS: Amplísimo catálogo,
con multitud de ejemplos de transductores para NDT. Así como tablas de velocidad del sonido en diversos materiales.
Corrosión y ultrasonidos: Aplicación de los ultraso-nidos para determinar la corrosión superficial en los metales.
f. Uso Médico
En este apartado se incluye el uso de los ultrasonidos en aplicaciones médicas, que permite el examen del interior del cuerpo humano para detectar tumores o
fracturas, sin tener que emplear radiaciones electro-magnéticas, perjudiciales para los tejidos de los seres vivos.
Y no solo son usados como medio de exploración, sino incluso como herramienta terapéutica para cier-tas enfermedades.
Ultrasonidos terapéuticos: Ejemplo de ultrasonidos
de la gama de 1-3MHz, para uso terapéutico, princi-palmente aplicado a musculos, tendones y articula-
ciones.
7. BIBLIOGRAFÍA / ENLACES CSIC - Acústica: Hoja con diversas monografías y publicaciones del CSIC.
www.panametrics.com: Página web de uno de los principales fabricantes.
www.massa.com: Web de otro importante fabricante
de SONAR tanto aéreo como marítimo.
www.interphase-tech.com/ : web de otro fabricante especializado en SONAR.
Transductores de Ultrasonidos
15
www.siemens.es: Página de SIEMENS, contiene bastante información sobre los ultrasonidos para uso médico.
www.lrultrasonics.com/ : Ultrasonidos usados para limpieza.
www.ia.csic.es/Ultrasonidos/ultrasonidos.htm: Pá-gina del CSIC dedicada a los ultrasonidos.
http://www.national.com/catalog/: Web de National
Semiconductors. Descripciones de todo tipo de sensores.