toward practical knowledge- based tools for battle planning and scheduling alexander kott larry...
TRANSCRIPT
Toward Practical Knowledge-Based Tools for Battle Planning and Scheduling
Alexander Kott
Larry Ground
Ray Budd
BBN Technologies
Lakshmi Rebbapragada
Army CECOM
John Langston
Austin Information Systems
Views expressed in this paper are those of the authors and do not necessarily reflect those of the U. S. Army or any agency of the U.S. government.

Outline
Problem The CADET System Key Engineering Decisions Challenges Ahead Other Domains

Problem• Building an operation (e.g., battle) plan for a large, complex, military force, e.g., US Army Brigade or Division
• Performed by a planning cell
• Trucks, tents, maps, acetate sheets
• Begins w/ Cmdr sketch and statement
• Follows Military Decision Making Process (MDMP)
• Most time-consuming steps: COA development, analysis
• Challenge: tasking, allocation, synchronization
• Challenge: estimations of time-space, resources, consumption, attrition

Example of a Battle Plan-Schedule – Synch. Matrix
Timeline (H-hours)
Classes of tasks
Tasks w/ time, place, resources

Example of an Order
Tasks w/ time, place, resources
Resources (units)
Terrain features, units, reference
lines
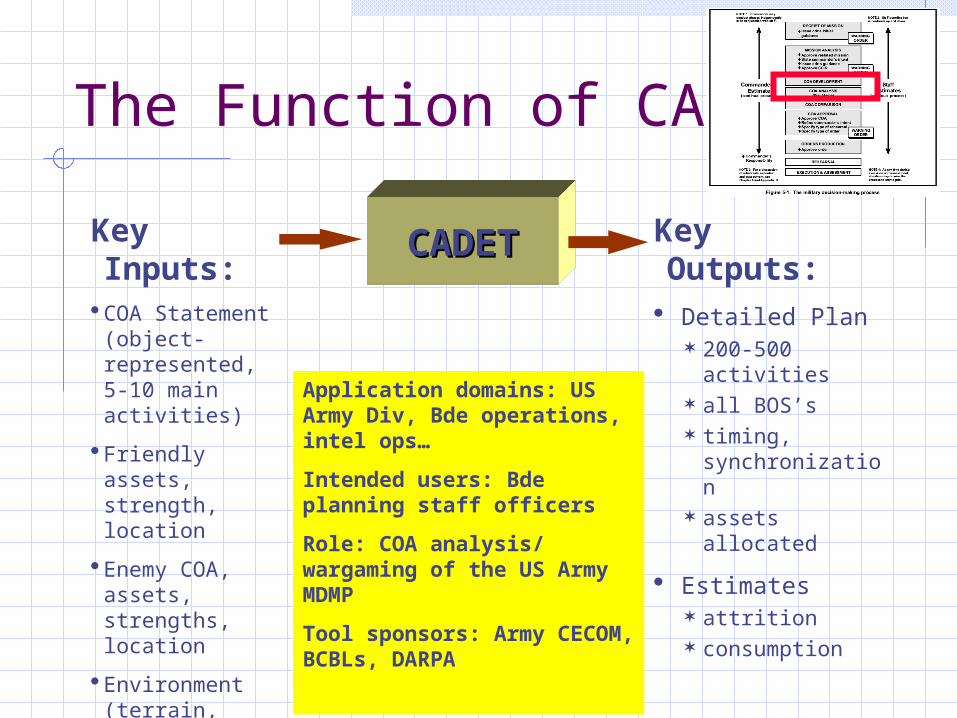
Key Inputs: COA Statement
(object-represented, 5-10 main activities)
Friendly assets, strength, location
Enemy COA, assets, strengths, location
Environment (terrain, etc.)
Key Outputs: Detailed Plan
200-500 activities all BOS’s timing,
synchronization assets allocated
Estimates attrition consumption
CADETCADET
The Function of CADET
Application domains: US Army Div, Bde operations, intel ops…
Intended users: Bde planning staff officers
Role: COA analysis/ wargaming of the US Army MDMP
Tool sponsors: Army CECOM, BCBLs, DARPA

How CADET is Used
CADET
COA Entry
Using COA Entry tool, officer enters
digitized operational concept: sketch and
statement
COA Entry sends digitizedCOA sketch and statement
to CADETCADET generates detailed,
synchronized plan and estimates
The staff reviews and modifies
CADET’s products
OPORD, OPLAN, FRAGOs are generated and
issued

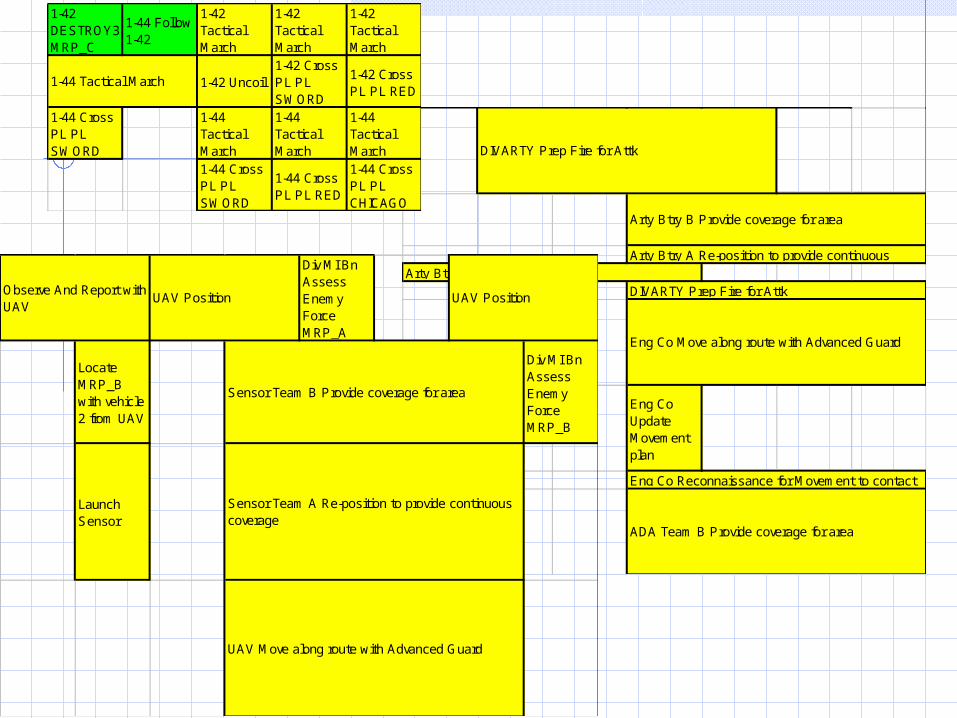
Eng Co Update Movement plan
ADA Team B Provide coverage for area
Eng Co Reconnaissance for Movement to contact
Eng Co Move along route with Advanced Guard
Arty Btry A Re-position to provide continuous
DIVARTY Prep Fire for Attk
Arty Btry B Prep Fire for AttkDIVARTY Prep Fire for Attk
Arty Btry B Provide coverage for area
1-42 DESTROY3 MRP_C
1-44 Follow 1-42
1-42 Tactical March
1-42 Tactical March
1-42 Tactical March
1-42 Uncoil1-42 Cross PL PL SWORD
1-42 Cross PL PL RED
1-44 Cross PL PL SWORD
1-44 Tactical March
1-44 Tactical March
1-44 Tactical March
1-44 Cross PL PL SWORD
1-44 Cross PL PL RED
1-44 Cross PL PL CHICAGO
1-44 Tactical March
Div MI Bn Assess Enemy Force MRP_A
Locate MRP_B with vehicle 2 from UAV
Div MI Bn Assess Enemy Force MRP_B
Launch Sensor
UAV Move along route with Advanced Guard
Sensor Team A Re-position to provide continuous coverage
Sensor Team B Provide coverage for area
UAV PositionObserve And Report with UAV
UAV Position

POL
TOW BGM-71F120MM Mortar25MM shell
1-42 Consumption/Attrition CalculationsWeapons System
Personnel
POL
120MM HEAT-MP-T M830SABOT: 120MM APFSDS-T M829A1120MM Mortar
1-43 Consumption/Attrition CalculationsWeapons System
Personnel
POL
120MM HEAT-MP-T M830SABOT: 120MM APFSDS-T M829A1120MM Mortar
RES Consumption/Attrition CalculationsWeapons System
Personnel
POL
87% 86% 86% 85% 82% 79% 76% 73%
96% 96% 96% 96% 92% 87% 83% 79%96% 96% 96% 96% 92% 87% 83% 79%96% 96% 96% 96% 92% 87% 83% 79%
92% 92% 92% 92% 92% 88% 83% 78%
94% 94% 94% 94% 94% 90% 87% 83%
99% 98% 98% 98% 97% 94% 91% 88%
100% 100% 100% 100% 100% 96% 92% 87%
100% 100% 100% 100% 100% 96% 92% 87%
100% 100% 100% 100% 100% 96% 92% 87%
87% 85% 84% 83% 81% 80% 79% 77%
90% 89% 88% 87% 86% 85% 84% 83%
64% 61% 58% 55% 52% 49% 46% 42%
59% 55% 51% 47% 43% 39% 35% 31%
59% 55% 51% 47% 43% 39% 35% 31%
59% 55% 51% 47% 43% 39% 35% 31%
100% 100% 100% 100% 100% 100% 100% 100%
100% 100% 100% 100% 100% 100% 100% 100%
80% 78% 77% 76% 75% 73% 72% 71%
A Key Engineering Decision: Interleaving
Challenge: strong coupling of multiple problem aspectsplanning affects schedulingscheduling impacts suitability of activitiesboth impact routingrouting impacts the required activitiesattrition and consumption impact activities, timing
Significant: enemy acts as the key factor in this strong coupling

Interleaving: “plan a little, schedule a little…”
interleaved increments of planning, routing, time estimating, scheduling, estimates of attrition / consumption small increments rely on assumptions based on prior decisions size of an increment: larger is less informed, smaller – less optimal experimental compromise: 10-20 activities, also convenient for user’s review
attrition
logistics
movements
planning
scheduling
A Key Engineering Decision: Action-Reaction-Counteraction
Challenge: enemy has a critical vote in every decision; movements and action of enemy units impact all aspects of the problem
Our approach:Decided against game-theoretic approachesAdopted a known manual heuristic: A-R-CFor each Action (Friendly), estimate the likely Reaction (Enemy), then produce Counteraction (Friendly)Each Reaction or Counteraction may be complexNot the same as a 2-ply game!Further “plies” not valuableCADET extends A-R-C by parallel planning for both friendly and enemy forces

A Key Engineering Decision: UI Independence
On one hand: A decision-support system is 80% about UI You need UI for a good demo and to get $$
On the other hand: Too many people building similar-looking UIs Good UI leaves no money for good AI A deployment environment would have its own
UI Can conventional UI concepts apply to this
problem (time, stress, representation)? Need new concepts
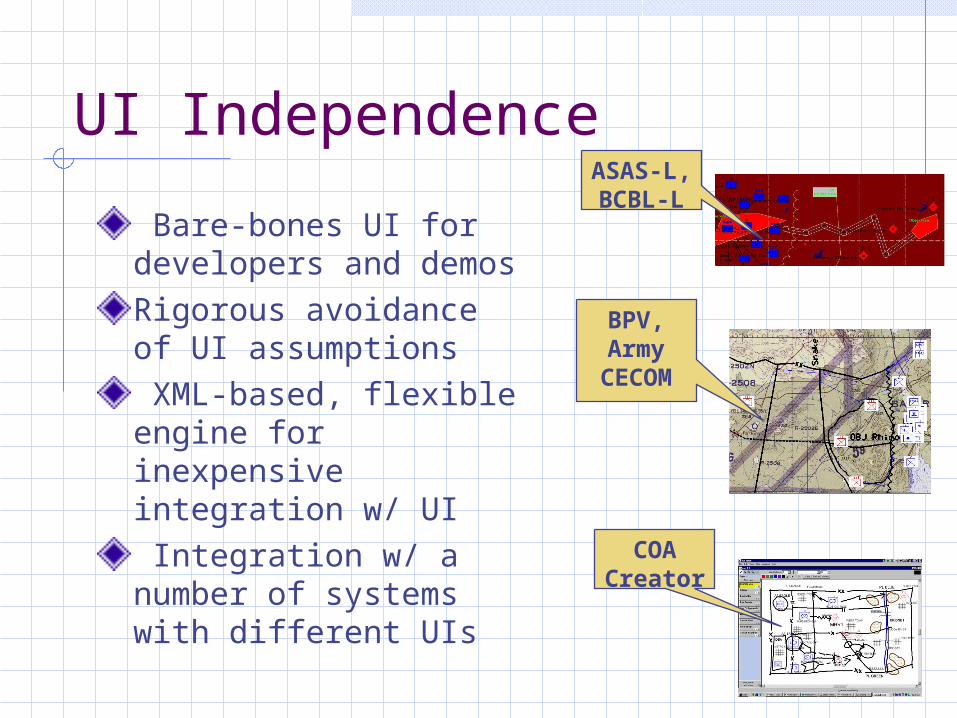
UI Independence
Bare-bones UI for developers and demos Rigorous avoidance of UI assumptions XML-based, flexible engine for inexpensive integration w/ UI Integration w/ a number of systems with different UIs
ASAS-L,
BCBL-L
BPV,Army
CECOM
COACreato
r

Challenges Ahead: Field Maintenance of Knowledge
Extreme demands on KB maintenance: In the field By non-
programmers
A partial answer: Simple templates No provisions for
programming A 70% solution?
A route should be selected so that the unit moves through the destination area
An objective area is required
Maneuver unit advance logic should be used to model the unit movement
The unit candidate criteria, and BOS are specified
Given that the seize is supported, the domain expert assesses that the unit performing this task will receive only 90% of the attrition of a normal engagement

Challenges Ahead: Distributed Collaboration
Must provide for: Multiple users – integrated plans Partial plans by coalition members Capture, resolve inconsistencies Asynchronous Geographically dispersed No, it’s not about a better electronic
white board
Challenges Ahead: Dynamic Continuous Replanning
Once execution starts, the battle plan immediately deviates from reality Ideally, commanders and staff would like to perform rapid replanning within execution Performance of algorithms is not critical Manual input of commander intent, concept is critical Understanding of execution stability is critical

Other Domains: Robot-Human Teams in Special Ops
16 units/teams•Robots•TacAir•Helos•Ground elements•Indirect fire sets
TF Falcon
TF Hawk
ISB
drop Team 1
drop Team 2 & 6
drop Team 3 & 4
drop Team 5
AA Whiskey
AA Sierra
TF Falcon
TF Hawk
ISB
AA Whiskey
AA Sierra
TF Snake
SF
RP 7
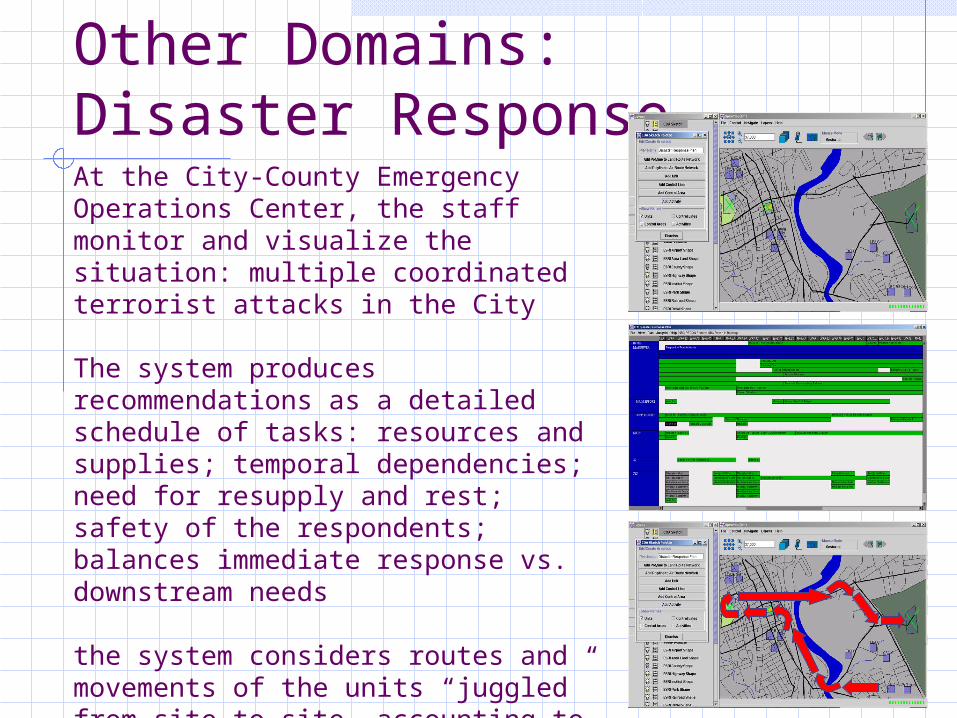
Other Domains: Disaster ResponseAt the City-County Emergency Operations Center, the staff monitor and visualize the situation: multiple coordinated terrorist attacks in the City
The system produces recommendations as a detailed schedule of tasks: resources and supplies; temporal dependencies; need for resupply and rest; safety of the respondents; balances immediate response vs. downstream needs
the system considers routes and movements of the units “juggled” from site to site, accounting to availability of roads and bridges, flows of refugees, etc.

Conclusions
An instructive example of a (common) real-world, non-decomposable problem Interleaving can be an effective practical approach to such problems A-R-C heuristic is useful for adversarial problems and may have strong theoretical justification UI is not always a good investment Key remaining challenges: distributed collaboration and dynamic, stable replanning Intriguing possibilities in other problem domains
BACKUP SLIDES

Interleaving and Backtracking
Minimal or no backtracking: Infeasibilities are best resolved by the user, and only after he sees “the whole” Often accepted and even expected Clean resolution often calls for change in sketch-and-statement
Look-ahead and non-sequential expansion:Unlike simulation or wargamingHeuristics for focusing on most critical activities firstNot necessarily sequential to those already planning

End-User TaskModeling Tool
Synch MatrixInterface
Collab. Analyzer,Merger
In-ExecutionReplan Analyzer
Temporal Constraint Mgr
Route Calculator-fast -multi-var optimiz.
Expander/Scheduler-interleaved process
Attrition Calculator-Fast-Calibrated-Incl. Timing…
Task Models-expansion methods- timing, resources
XML Engine-translates in/out-Xerces, Xalan
existsTo be
Architecture for Interleaving