thiẾt bỊ ĐiỀu khiỂn vÀ mÁy ĐiỆn - mientayvn.com...
TRANSCRIPT

THIẾT BỊ ĐIỀU
KHIỂN VÀ MÁY ĐIỆN
Chương 1: Những nguyên tắc cơ
bản khi xây dựng hệ điều chỉnh
tự động truyền động điện.

Trao đổi trực tuyến tại:
http://www.mientayvn.com/chat_box_li.html
Nội dung chính:
1. Những vấn đề chung khi thiết kế hệ điều
chỉnh tự động(HĐCTĐ).
2. Độ chính xác của hệ điều chỉnh tự động
truyền động điện.
3. Phương pháp hàm chuẩn modul tối ưu dùng
tổng hợp các mạch vòng điều chỉnh nối cấp
4. Tổng hợp các mạch vòng điều chỉnh số.
5. Hệ thống truyền động điều chỉnh phi tuyến.

1.1 Khái niệm và phân loại
Khái niêm:
Nguyên tắc cơ bản khi xây dựng hệ điều chỉnh tự
động truyền động điện là phải đảm bảo giá trị yêu
cầu của các đại lượng điều chỉnh mà không phụ
thuộc vào các nhiễu loạn tác động lên hệ.
R BĐ
ĐL
M MX
THĐ
NL

Khái niệm và phân loại tiếp… Phân loại:
1. Hệ điều chỉnh tự động truyền động điện điều chỉnh duy trì theo lượng đặt trước không đổi như tốc độ không đổi, công suất không đổi, vận tốc không đổi…
2. Hệ điều chỉnh tùy động(Hệ bám): là hệ điều chỉnh vị trí trong đó cần điều khiển truyền động theo lượng đặt trước biến thiên tùy ý. Ví dụ như hệ cắt gọt kim loại, rada…
3. Hệ điều khiển chương trình: Là hệ điều khiển vị trí nhưng đại lượng điều khiển tuân theo chương trình đặt trước trong bộ nhớ, thường dùng để điều chỉnh các đại lượng điều khiển có quỹ đạo chuyển động phức tạp. Hay gặp trong các dây truyền sản xuất có robot.

1.2 Những vấn đề chung khi thiết kế hệ
điều chỉnh tự động truyền động điện Khi thiết kế hệ điều chỉnh tự động truyền động điện cần
phải đảm bảo hệ thực hiện được tất cả các yêu cầu đặt
ra, đó là các yêu cầu về công nghệ, các chỉ tiêu chất
lượng và các yêu cầu kinh tế.
Trong các hệ điều chỉnh tự động truyền động điện, cấu
trúc mạch điều khiển, luật điều khiển và tham số của
các bộ điều khiển có ảnh hưởng rất lớn đến chất lượng
của hệ. Vì vậy khi thiết kế hệ ta phải thực hiện các
thuật toán về phân tích và tổng hợp hệ để tìm ra lời giải
thích hợp lý, sao cho đáp ứng được yêu cầu kinh tế và
kỹ thuật đề ra.

1.2 Tiếp...Bài toán tổng hợp hệ.1. Bài toán tổng hợp chức năng thực hiện trong trường hợp đã
biết cấu trúc và tham số của mạch điều khiển ta phải xác định luật điều khiển đầu vào sao cho hệ đảm bảo chất lượng.
2. Bài toán tổng hợp tham số thực hiện khi đã biết cấu trúc hệ và lượng tác động đầu vào của hệ ta cần xác định tham số các hệ điều khiển.
3. Bài toán tổng hợp cấu trúc – tham số thực hiện khi đã biết quy luật biến thiên của lượng đẩu vào và ra của từng phần tử trong hệ thống, ta cần xác định cấu trúc của hệ và đặc tính thma số của biộ điều chỉnh.
ta sẽ nghiên cứu các phương pháp tổng hợp hệ thường dùng là phương pháp hàm chuẩn môdul tối ưu, phương pháp không gian trạng thái cũng như nghiên cứu các hệ truyền động điều khiển số và hệ truyền động có phần tử phi tuyến.

1.3 Độ chính xác của hệ thống truyền động điện
tự động trong chế độ xác lập và tựa xác lập
F0(p) – hàm truyền mạch hở;
TM – thiết bị công nghệ;
R, r(t) – tín hiệu điều khiển;
C,c(t) – tín hiệu ra;
E = R-C – sai lệch điều chỉnh ;
Ni – các nhiễu loạn.
)(1
)()(
0
0
pF
pFpF
F0(p) TME
-
R
N1 …….. Nn
C

1.3.1 Các hệ số sai lệch
Khai triển Mc.Laurin hàm e(t) ta có :
C0 – Hệ số sai lệch vị trí
C1 – Hệ số sai lệch tốc độ
C2 – Hệ số sai lệch gia tốc.
i
i
idt
tRdC
dt
tRdC
dt
tdRCtRCte
)(...
)()()()(
2
2
210
....)(
...)(
)( 11
111110
i
i
iNNNdt
tNdC
dt
tdNCtNC
)()(
...)(
)( 10 tRdt
tNdC
dt
tdNCtNC
i
n
i
iNnn
NnnNn

1.3.2 Các tiêu chuẩn sai lệch Tiêu chuẩn tích phân bình phương sai lệch(ISE) Theo đó chất
lượng của hệ thống được đành giá bởi tích phân :
Một hệ thống được thiết kế theo tiêu chuẩn ISE làm cho các sai
lệch lớn ban đầu giảm rất nhanh, do đó có tốc độ đáp ứng phải
rất nhanh và kết quả là kém ổn định. Thường áp dụng để thiết kế
các hệ thống có yêu cầu cực tiểu hóa tiêu thụ năng lượng.
Tiêu chuẩn tích phân của tích số giữa thời gian và giá trị tuyệt
đối của sai lệch (ITAE): hệ thống tự điều chỉnh là tối ưu nếu nó
làm cực tiểu tích phân sau đây:
Hệ thống được thiết kế theo tiêu chuẩn này sẽ cho đáp ứng có
quá độ điều chỉnh nhỏ và có khả năng làm suy giảm nhanh các
dao động trong quá trình điều chỉnh. Việc tính toán thiết kế còn
hay dùng tiêu chuẩn tích phân của tích số giữa thời gian với bình
phương hàm sai lệch ITSE:
0
2 )( dtte
0
)( dttet
0
2 )( dttte

1.4 Tổng hợp các mạch vòng điều khiển kiểu nối cấp
dùng phương pháp hàm chuẩn môdul tối ưu.
Trong sơ đồ có n thông số X,n bộ điều chỉnh R(p) của n đối tượng
(hệ thống) S(p), trên đó tác động n nhiễu loạn chính p1, …,pn. Từ
sơ đồ thấy rằng tín hiệu ra của bộ điều chỉnh Ri chính là tín hiều
điều khiển của mạch vòng điều chỉnh cấp i-1. Các đại lượng(thông
số) điều chỉnh x1,…xn tương ứng với giá trị đặt x1d,…xnd. Số
lượng điều chỉnh đúng bằng số các đại lượng điều chỉnh.
Rn(p) R2(p) R1(p) S01(p) S0n(p)S02(p)…. ….
P1P2 Pn
Xnđ X2đX1đ
- - -
F01
F1
F02
F2
X1 Xn

1.4 TiếpTrong trường hợp chung hàm truyền của hệ thống có dạng:
Td: Hằng số tg của khâu trễ.
Tk: Khâu có hằng số tg lớn.
Tk: Khâu có hằng số tg nhỏ.
Thường dùng phương pháp hàm chuẩn tối ưu để tổng hợp thông số
bộ điều khiển. Quá trình được thực hiện từ mạch vòng thứ 1 – n.
Việc tổng hợp sẽ được thực hiện sao cho bù được các khâu có hằng
số thời gian tương đối lớn. Các khâu có hằng số thời gian tương đối
nhỏ sẽ không được bù.
v
k
u
s
sk
j
m
j
pT
j
pTpTp
epTK
pS
d
1 1
'
1
0
)1()1(
)1(
)(
1.4.1 Áp dụng tiêu chuẩn modul tối ưu.Đối với một hệ thống kín, khi tần số tiến đến vô hạn thì môdul của
đặc tính tần số - biên độ phải tiến đến không. Vì thế đối với dải
tần thấp nhất hàm truyền phải đạt được điều kiện: F(jw)~1
Hàm chuẩn theo tiêu chuẩn môdul tối ưu là hàm có dạng :
(*)
Sau khi ứng dụng tiêu chuẩn môdul cần phải kiểm tra sự ổn định
của hệ.
a. Trường hợp hệ hữu sai có hàm truyền:
Trong đó T2 >T 1
Nếu chọn bộ điều chỉnh kiểu PI:
b. Trường hợp hệ có hàm truyền:
22221
1)(
pppFMC
)1)(1()(
21
0pTpT
KpS t
pTK
pTpR
t 1
2
2
1)(
u
s
s pT
KpS
1
'0
)1(
)(
1.4.1 Tiếp…Ts’ là các hằng số thời gian nhỏ. Theo tiêu chuẩn ta tìm được bộ
điều chỉnh có cấu trúc tích phân:
trong đó Ts =
c)Nếu hàm truyền của hệ thống dạng:
Tức là hàm truyền có dạng là tích của hàm truyền của hai trường
hợp trên thì ta có thể điều chỉnh PID:
d) Nếu
Thì có bộ điều chỉnh kiểu tỉ lệ:
pKTpR
s2
1)(
u
s
sT1
'
2
1 1
'0
)1()1(
)(
k
u
s
sk pTpT
KpS
pTK
pT
pRs
k
k
2
1)1(
)(
2
10
0
1
'0
)1(
)(
s
s pTp
KpS
sKTpR
2
1)(

1.4.1 Tiếp…Nếu hàm truyền:
thì có bộ điều chỉnh PD:
Như vậy là tùy vào hàm S0(p) của hệ hở (đối tượng) mà bằng
các bộ điều chỉnh R(p) ta được hệ có hàm truyền dạng(*).
Trong các trường hợp trên, giá trị hằng số Tσ là nhỏ, nên gần
đúng có thể coi hệ kết quả có hàm truyền dạng quán tính :
u
s
s pTTpp
KpS
1
'0
)1()1(
)(
sKT
TppR
2
1)(

1.4.2 Áp dụng tiêu chuẩn tối ưu đối xứng Tiêu chuẩn tối ưu đối xứng thường áp dụng để tổng hợp các bộ
điều chỉnh trong mạch có yêu cầu cấp vô sai cấp cao, nó cũng
được áp dụng có hiệu quả để tổng hợp các bộ điều chỉnh theo
quan điểm nhiễu loạn.
Hàm chuẩn tối ưu đối xứng có dạng :
Để dẫn ra ý nghĩa của tiêu chuẩn, xét thí dụ hệ thống S0(p) có
dạng vô sai cấp 1 nhưng lại dùng bộ điều chỉnh kiểu PI
trong đó Ts có thể là tổng của các hằng thời gian nhỏ
3322 8841
41)(
pTpTpT
ppFDX
)1(
1)()()(
1
00
s
t
pTpT
K
pKT
pTpSpRpF

1.4.2
Áp dụng điều kiện của tiêu chuẩn tối ưu môdul ta tìm được các
phương trình đặc tính :
a12 – 2a0a2 = 0
a22 – 2a1a3 = 0, suy ra
(K1T0)2 – 2K1KT0Ts = 0
(KT0T1)2 – 2K1T02KT1Ts = 0
Giải hệ phương trình trên ta tìm được
; T0 = 4Ts
Hàm truyền của hệ sẽ là :
1
)1()(
01
2
10
3
10
00
pTKpTKTpTTKT
pTKpF
s
1
12
T
TKK s
3322 8841
41)(
pTpTpT
TpF
sss
sDX
1.4.2 Trong trường hợp hàm truyền của đối tượng có chứa khâu quán
tính thứ hai với hằng số thời gian lớn Hàm truyền dạng tối ưu
đối xứng với τσ = Ts:
Trong trường hợp đối tượng là hệ hữu có khâu quán tính lớn T1
>>Ts chỉ có thể làm gần đúng để đưa về dạng
Xấp xỉ:
Thì ta có hàm truyền của mạch điều chỉnh sẽ là:
)1)(1()(
21
0pTpTpT
KpS
s
)1()1)(1()(
1
1
1
1
pTpT
K
pTpT
KpS
ss
pTpT 11
1
1
1
3322 8841
1
)(
)()(
pTpTpTpX
pXpF
sssd

1.4.3 Tổng hợp các bộ điều chỉnh theo nhiễu loạn
trong đó P(p) là nhiễu loạn.
khi T1>>Ts có thể coi hệ thống hở S0(p) gần đúng như là hệ vô
sai cấp 1 và bộ điều chỉnh sẽ là PI và theo tiêu chuẩn tối ưu đối
xứng có:
Hàm truyền của hệ theo nhiễu lọan là
- XXd
S0(p)
R(p)
P
pKT
pT
0
01
)1)(1( 1
1
pTT
K
s
pTK
pTTpR
s
s
2
1
1
8
)41()(
3322
11
2
1
1
0
0
0
0
88)1()8
1(41
8
)()(
1
)()(1)(
)()(
)()(1
)(
)(
)(
pTpTT
Tp
T
TT
pT
T
K
pFpRpSpRpR
pSpR
pSpR
pS
pP
pX
ssss
s
s
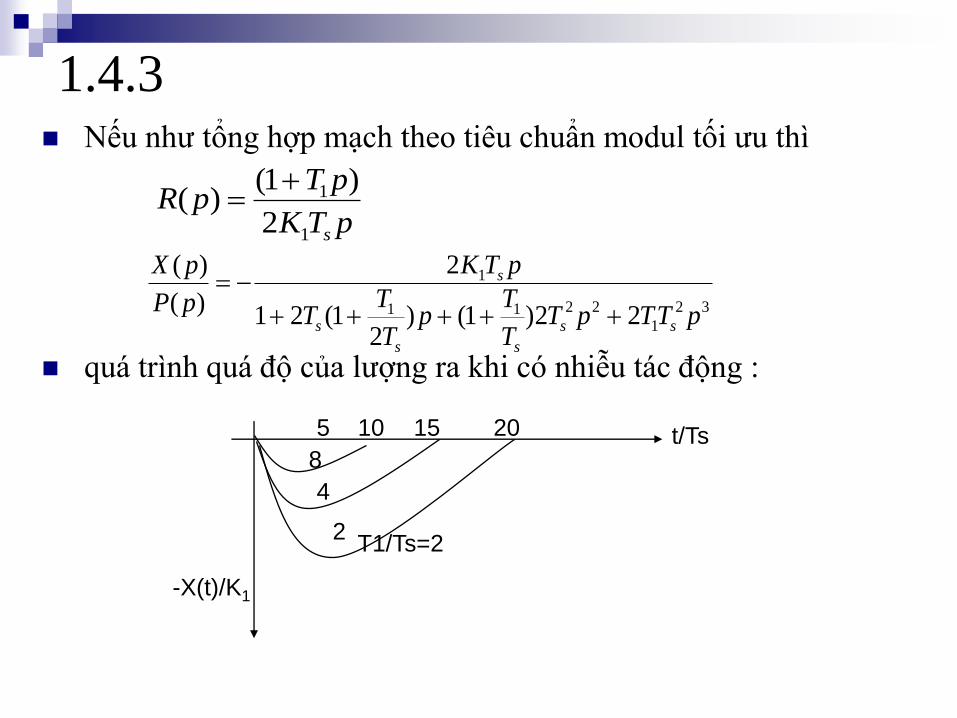
1.4.3 Nếu như tổng hợp mạch theo tiêu chuẩn modul tối ưu thì
quá trình quá độ của lượng ra khi có nhiễu tác động :
pTK
pTpR
s1
1
2
)1()(
32
1
2211
1
22)1()2
1(21
2
)(
)(
pTTpTT
Tp
T
TT
pTK
pP
pX
ss
ss
s
s
5 10 15 20
T1/Ts=2 2
4
8t/Ts
-X(t)/K1

1.5 Tổng hợp các mạch vòng điều chỉnh số của truyền
động điện
Các máy tính số, cũng như của hệ thống vi sử lý không
chỉ được ứng dụng trong việc điều khiển logic truyền
động điện mà còn được dùng để xây dựng các bộ điều
khiển số có một số ưu việt so với các mạch điện tử
tương tự về tính mềm dẻo khi cần thay đổi cấu trúc và
tham số của hệ thống tự động, có độ chính xác cao của
quá trình điều chỉnh và có tính chống nhiễu cao
1.5.1 Số hóa các tín hiệu
Việc số hóa các tín hiệu được thực hiện trước hết bởi động tác lấy mẫu, sau đó tín hiệu lấy mẫu này được mã hóa thành dữ liệu dạng số nhờ các chuyển đôit A/D. Tín hiệu được lấy mẫu theo chu kỳ có độ dài T bằng cách chuyển mạch các vị trí đo (xem hình. Trong sơ đồ này S(p) là phần liên tục của hệ thống và HD là phần tử lưu giữ tín hiệu. Quá trình được mô tả cụ thể bởi một chu trình lấy mẫu và lưu giữ, tạo tín hiệu bởi đồ thị trên hình vẽ.
a) Lượng tử hóa các tín hiệu
Việc lượng tử hóa các tín hiệu xảy ra khi nhập dữ liệu vào máy tính, khi xử lý các dữ liệu trong máy và khi đưa các dữ liệu từ máy ra. Lượng tử hóa dữ liệu đưa vào máy tính được thực hiện bởi chuyển đổi A/D. Dung lượng số Nym biểu diễn đại lượng liên tục y(t) được cho bởi độ dài từ n, tức là tổng số các bít của chuyển đổi A/D trừ bít đánh dấu.
Nym = 2n – 1 (1-19)

1.5.1 Trong đó Ym là giá trị của đại lượng liên tục y(t). Đơn vị của việ
số hóa đại lượng y(t) sẽ là :
Giá trị bằng số của tín hiệu Ny ở đau ra chuyển đổi A/D được xác
định từ biểu thức :y = Ny∆y + σy hoặc y = y0 + δy với y0=Ny∆y
là sai số của phép chuyển đổi.
Tránh phép nhân hoặc thay bằng phép cộng, dịch bít.
Các ảnh hưởng của phép số hóa tới hệ thống trong chế độ xác lập:
Ảnh hưởng tới sai lệch điều chỉnh kéo dài.
Tới sai lệch điều chỉnh biến đổi ngẫu nhiên.
Tới các dao động có tần số thấp có chu kỳ dao động = 1 số
chu kỳ lấy mẫu
ym
m
N
Yy
yy
1.5.1..1.5.2b) Phạm vi biểu diễn và hạn chế lượng ra
Hệ điều chỉnh số chậm hơn so với hệ điều chỉnh liên tục tương đương.
Tần số lấy mẫu phải được chọn thỏa mãn định lý lấy mẫu Shanon:
Với K >=2
Tr:hằng số tg thay thế của mạch vòng kín.
1.5.2 Biến đổi Z
a)Lấy mẫu và lưu giữ tín hiệu:
Bộ lấy mẫu biến tín hiệu liên tục thành chuỗi các xung tại các
thời điểm lấy mẫu 0,T, 2T
Phần tử lưu giữ sẽ chuyển đổi tín hiệu đã được lấy mẫu thành
tín hiệu gần liên tục có dạng bậc thang, 0 đổi giữa 2 chu kỳ lấy mẫu
gọi là phần tử lưu giữ bậc 0 có hàm truyền là:
K
TT r
p
eG
PTz
p
1

1.5.2 Biến đổi Z
b) Phép biến đổi Z
Ta có X*(p)=L{x*(z)} =
Nếu ta định nghĩa toán tử z sao cho z = ept thì ta có thể viết X*(p)
như là
X(z) = X*(p) = X*( LnZ) =
Khi đó hàm X(z) được gọi là biến đổi Z của hàm x(t) ký hiệu:
X(z) = Z{x*(t)}
c) Tính ổn định trong mặt phẳng z
Khi chuyển sang mặt phẳng Z nửa trái mặt phẳng P được vẽ lại vào
bên trong của nửa vòng tròn đơn vị có tâm là gốc tọa độ.
0
).(k
kTpZkx
T
1
0
).(k
kZkTx

1.5.3 Luật điều chỉnh của các mạch vòng điều chỉnh
kiểu gián đoạn1. Gián đoạn hóa các luật điều chỉnh liên tục
2. Xây dựng luật điều chỉnh bằng phương pháp đặc tính tần biến
vị.
3. Tính toán luật điều chỉnh bằng phương pháp modul tối ưu của
hàm truyền biến vị.

1.6 Phương pháp không gian trạng thái
1. Không gian trạng thái của hệ tự động điều chỉnh
Phương pháp tần số hiệu quả trong việc phân tích tổng hợp hệ
SISO nhưng không áp dụng được trong hệ MIMO.
Xét hệ có n biến trạng thái:
Với
Khi đó nghiện của phương trình là y = cx với c = [1 0 0 … 0]
uBxAx
nx
x
x
x
.
.
2
1
121
1....000
....
0....100
0....010
aaaa
A
nnn

1.6 Phương pháp không gian trạng thái
.2. Một số khái niệm và tính chất cơ bản
1. Tính không duy nhất của một tập biến trạng thái
2. Các giá trị riêng của ma trận n x n là nghiệm của phương trình
đặc tính:
3. Sự bất biến của giá trị riêng:
4. Đưa ma trận n x n về ma trâng đường chéo
5. Biểu diễn không gian trạng thái của hệ nhiều chiều
0 AI
APPIAI 1
uBxAx
uDxCy
1.6 Phương pháp không gian trạng thái
.3. Giải phương trình trạng thái tuyến tính dừng.
Xét phương trình x’=Ax trong đó x là vecto n chiều A(n x n) giả sử
nghiệm là chuỗi lũy thừa x(t) = b0 + b1t + b2t2 + ….+ bkt
k
Lấy đạo hàm rồi thay vào phương trình x’ = Ax được:
b1+ 2 b2t + …+…+ k bktk-1 + …=A(b0 + b1t + b2t
2 + ….+ bktk)
Đồng nhất các hệ số 2 vế ta được:
b1= Ab0
b2= 1/2 A2b0
……..
bk= 1/k!Akb0
b0 = x(0)
=> )0(e ...)x(0) t!
A ... t
!2
A At (I x(t) k
k2
2
xk
At
1.6.3 tiếp… Trong pt trên eAt được gọi là hàm mũ ma trận. Nó có một số
tính chất:1. .
2. eA(t+s) = eAteAs
3. eAt.e-At = I
4. e(A+B)t = eAteBt nếu A.B = B.A
5. e(A+B)t ≠ eAteBt nếu A.B ≠ B.A
AeAeedt
d AtAtAt

1.6.3… Ma trận chuyển trạng thái( (t) )
Từ phương trình x’=Ax chuyển điều kiện đầu ta có x(t)= (t)x(0)
(t) chứa mọi thông tin về nghiệm tự do của pt x’=Ax. Nó có các tính chất sau:
1. (0) = eA0 = I
2. (t) = eAt = [e-At]-1 = [(-t)]-1 hoặc -1(t) = (-t)
3. (t1 +t2) = eA(t1+t2) = eAt1 e
At2 = (t1) (t2) = (t2) (t1)
4. [(t)]n = (nt)
5. (t2 – t1) (t1 – t0) = (t2 – t0) = (t1 – t0) (t2 – t1)
Các bước tìm ma trận chuyển trạng thái
Cho x’=Ax trong đó x là vecto n chiều A(n x n)
B1: tìm [pI – A]-1
B2: tính (t) = L-1{[pI - A]-1 }

1.6.3…Nghiệm của phương trình trạng thái có kích thích.
Xét phương trình x’= Ax + Bu(t)
Trong đó x là vecto trạng thái n chiều, U là vecto kich thích r chiều
A là ma trận (n x n) B là ma trận (n x r) còn u là vecto kích thích.
Tương tự như pt thuần nhất nghiệm của pt trên có 2 thành phần
Thành phần chứa phép chuyển trạng thái của điều kiện đầu và thành
phần tăng thêm do có yếu tố tác động từ véc tơ kích thích.
t
tA dBuex0
)(At )(.)0(e x(t)

1.6.3…
Tìm ma trận chuyển trạng thái của hệ thống sau:
Tính pI-A, det(pI-A), [pI-A]-1; L-1;-1(t)
2
1
.
2
.
1
32
10
x
x
x
x

1.6.4 Ma trận truyền
Với hệ thống SISO tuyến tính:
Thì hàm truyền G(p)=Y(p)/U(p) = C(PI – A)-1.B +D (*)
Với hệ MIMO: ví dụ có r đầu vào và m đầu ra thì.
Phần tử Gijp) là quan hệ giữa đầu ra thứ i với đầu ra thứ j và được
tính tương tự như (*)
)(
...
)(
)(
.
)(...)()(
............
)(...)()(
)(...)()(
)(
.
.
)(
)(
2
1
21
22221
11211
2
1
pU
pU
pU
pGpGpG
pGpGpG
pGpGpG
pY
pY
pY
rmrmm
r
r
m
uBxAx
uDxCy

1.6.4… Với hệ vòng kín có cấu trúc như sau:
Vì hệ là tuyến tính: Y(p) = G0(p)[U(p) – B(p)]
= G0(p)[U(p) – Y(p).H(p)]
G(p) = [I + G0(p)H(p)]-1. G0P
G0(p)
H(p)
U(p) E(p)
-
Y(p)
B(p)

1.6.4…Phân ly trong hệ điều khiển nhiều chiều.
Nhằm phục vụ cho nhu cầu biến đổi cấu trúc và tham số sao cho một đầu ra của một của hệ chỉ chịu ảnh hưởng của 1 đầu vào.
Giả sử đối tượng có ma trận truyền Gp(p) n x x, cần thiết kế bộ điều chỉnh có ma trận truyền là n x n Gr(p) sao cho n đầu vào và đầu ra là phân ly, nghĩa là ma trận hàm truyền của hệ phải là ma trận chéo.
Bài toán phân ly là bài toán tìm ma trận hàm truyền Gr(p) mà trong trường hợp ma trận phản hồi H(p) là đồng nhất thì
G(p) = [I + G0(p)]-1 G0(p) trong đó G0(p) = Gp(p) Gr(p)
= G(p)[I - G(p)]-1
G0(p)[I – G(p)] = G(p)
)(...00
............
0...)(0
0...0)(
)(21
11
pG
pG
pG
pG
nn

1.6.4 phân ly…nhân 2 vế với ma trận nghịch đảo của ma trận trong ngoặc vuông ta
được:
G0(p) = G(p)[I – G(p)]-1

1.6.5 hệ thống tuyến tính không dừngMa trận chuyển trạng thái.
Xét phương trình ma trận vecto dạng x’= A(t).x là phương trình
thuần nhất không dừng. Nghiệm của pt là phép chuyển trạng thái
của điều kiện đầu bởi ma trận chuyển trạng thái.
Tính ma trận chuyển trạng thái bằng cách dùng khai triển chuỗi:
Trong trường hợp khi A(t) là ma trận chéo thì:
Ví dụ: Cho hệ thống 0 dừng có mô tả như sau:
Tính ma trận chuyển trạng thái (t,0)
Lần lượt tính các tích phân:
1
0 00
...})(){()(),( 12210
t
t
t
t
t
t
ddAAdAItt
t
t
dAtt
0
})(exp{),( 0
xt
x
0
10'

1.6.5 hệ thống…
t t
tt
tdA
0
2
0 20
0
0
10)(
80
60
20
0
0
104
3
12
1
1
0 1t
t
d
t
....82
10
....6
1)0,(
42
3
tt
tt
t
1.6.5 hệ thống tuyến tính không dừngPhương trình trạng thái tuyến tính không dừng có dạng:
Trong đó: x - vecto trạng thái n chiều.
u – vecto kích thích r chiều.
A(t) ma trận n x n; B(t) là ma trận n x r.
Các phần tử A(t) và B(t) được coi là hàm liên tục từng đoạn trong
khoảng (t0 t1).
Dạng nghiệm của pt trong đó (t0 t1) là ma
trận chuyển trạng thái.
Nghiệm của pt là:
utBxtAx )()(
)().,()( 0 ttttx
dUBttxtttx
t
t
0
)().().,()().,()( 00

1.6.6 Biểu diễn không gian trạng thái của hệ thống gián
đoạn Ta có sơ đồ khối của hệ thống gián đoạn
Trong đó x(k): vecto trạng thái
U(k) vecto kích thích y(k) vecto đầu ra.
Biểu diễn không gian trạng thái của hệ gián đoạn thường có dạng
x(k+1) = G(k).x(k) + H(k).U(k)
y(k) = C(k).x(k) + D(k).U(k)
Trường hợp hệ gián đoạn tuyến tính dừng thì phương trình đơn giản
hơn: x(k+1) = G.x(k) + H.U(k)
y(k) = C.x(k) + D.U(k)
D(k)
H(k) C(k)
G(k)
Trễu(k)
x(k+1)x(k)
y(k)

1.7 Hệ thống tự động điều chỉnh phi tuyến
1.7.1 Biểu diễn các quan hệ phi tuyến: các phần tử và ht phi tuyến
có thể chia là 2 lớp: tính chất phi tuyến nội tại và ngoại lai
Mô tả toán học của các phần tử phi tuyến
1
N: hàm biểu diễn quan hệ phi tuyến.
X: biên độ tín hiệu vào hình sin
Y1: biên độ sóng cơ bản của tín hiệu ra
1: dịch pha của sóng cơ bản của tín hiệu ra so với tín hiệu vào.
1.7.2 Phân tích các hàm biểu diễn phi tuyến
Một hệ thống tự động điều chỉnh phi
tuyến thường có 2 thành phần là phi tuyến và tuyến tính
NX Y
X
YN 1
Ne
-
n(e) G(p) c

1.7.2…Tính ổn định
Phương trình đặc tính của hệ: 1+N.G(jw)=0 => G(jw)= -1/N (1)
Nếu 1 được thỏa mãn thì trạng thái này quỹ đạo của G(jw) đi qua
điểm tới hạn (-1+ j0).
Trong phâ tích các hàm phi tuyến thì đặc tính tần được biểu diễn
sao cho toàn bộ quỹ đạo đường -1/N trở thành quỹ đạo các điểm
tới hạn. Vì vậy từ việc phân tích vị trí tương đối giữa quỹ đạo -1/N
và G(jw) có thể kết luận về tính ổn định của hệ thống:
- Nếu quỹ đạo -1/N không bị bao bởi quỹ đạo G(jw) thì hệ thống ổn
định và ngược lạiG(jw) Im
Re0
-1/N

1.7.3 Phân tích hệ thống phi tuyến bằng phương pháp
mặt phẳng phaA.Phương pháp mặt phẳng pha: Xét hệ thống cấp 2 mô tả bởi
phương trình vi phân x’’ + f(x,x’) = 0 trong đó f(x,x’) là hàm tuyến
tính hoặc phi tuyến của x,x’
Phương pháp do Poincare áp dụng đầu tiên là để tìm nghiệm của 2
ptrình vi phân bậc 1 đồng thời (1)
(2)
Từ định lý về tính duy nhất nghiệm của
hệ ptrình vi phân thì hệ 1,2 có nghiệm duy nhất khi f1 và f2 là giải
tích được(có khai triển taylor quanh 1 điểm)
Loại bỏ biến t ở 1,2 ta có (3) Phương trình
này cho biết độ nghiêng của tiếp tuyến của quỹ đạo mặt phẳng pha đi
qua điểm x1, x2 Nghiệm của (3) có thể viết dưới dạng x2=(x1) đây
là ptrình của 1 đường cong trong m phẳng pha nó chỉ ra chuyển
động của các điểm trạng thái của hệ thống
),( 2111 xxf
dt
dx
),( 2122 xxf
dt
dx
),(
),(
211
212
1
2
xxf
xxf
dx
dx
1.7.3 Phân tích hệ thống phi tuyến bằng phương pháp
mặt phẳng phaB. Dựng quỹ đạo mặt phẳng pha
- Nếu f(x,x’) là hàm chẵn(f(x,x’) = f(x,-x)) thì mặt phẳng pha đối xứng
qua trục x. Nếu là lẻ( f(x,x’) = -f(-x,x’)) thì đối xứng qua trục x’ còn
nếu f(-x,x’) = -f(-x,x’) thì đối xứng qua cả 2 trục x và x’.
1. Bằng giải tích Nếu (3) là giải tích ta chỉ cần lấy tích phân nó là có
được phương trình của quỹ đạo pha.
2. Phương pháp đồ thị: trong (3) coi x1 là biến độc lập còn x2 là biến
phụ thuộc. Như vậy từ (3) ta có
f1 = .f2
Quỹ tích của các điểm mà tại đó các quỹ đạo pha có cùng độ nghiêng
đã cho được gọi là các đường đẳng nghiêng. Từ các đường đẳng
nghiêng này ta dựng được quỹ đạo mặt phẳng pha
vd87
constdx
dx
1
2
1.7.3 Phân tích hệ thống phi tuyến bằng phương pháp
C. Tính nghiệm thời gian của hệ thống từ đồ thị mặt phẳng pha
1. Phương pháp sai phân: khi cần biết rõ đặc tính của hệ thống ở dạng
hàm của thời gian x(t) ta có thể tính gần đúng 1 số đại lương như tốc
độ biến thiên trung bình của hàm x(t) là =>gia số thời
gian tương ứng:
2. Phương pháp tích phân
dựa trên phương trình tích phân
Ta tính được khoảng thời gian từ t1 đến t2 là:
3. Phương pháp tiệm cận bằng các cung tròn
t
xx tb
'
tbx
xt
'
dxx
t1
2
1
1x
x
dxx
t
1.7.3 Phân tích hệ thống phi tuyến bằng phương pháp
D. Phân tích hệ phi tuyến bằng mặt phẳng pha
Trong các hệ thống cấp 2 có đặc tính phi tuyến phụ thuộc tín hiệu thì
có thể lấy tiệm cận hệ thống bằng các hệ tuyến tính từng đoạn. Mặt
phẳng pha được chia thành nhiều vùng, mỗi vùng ứng với 1 hệ tuyến
tính và có 1 điểm kỳ dị riêng.