thesis overview sean forsberg. what is lair? “…research at the lair is focused on multi-robot...
Post on 19-Dec-2015
214 views
TRANSCRIPT
LAIR Communicationwith Test Case and Simulator
Thesis overview Sean Forsberg

LAIR BackgroundWhat is LAIR?

“…research at the LAIR is focused on multi-robot systems and its applications in their field. Within these domains, topics of interest include motion planning, localization, mapping, integration of social systems, and control.” [LAIR Website]
What is LAIR?

OceanServer IVER2
Current Features◦ Dual CPU◦ GPS/Compass◦ Altimeter & Depth Sensor◦ WiFi & Acoustic Modem
Near Future Additions◦ Dual-Hydrophone Beacon Detector◦ Side-Scanning Sensor (for Localization)
LAIR Research Platform
Source: LAIR Website
Source: Sean Forsberg

Provide a stable, verbose platform for research◦ Add (and test the capabilities ) new sensors & tech
Dual-Hydrophone Beacon Locator Acoustic Modem
◦ Integrate a second IVER2 into missions◦ Develop an API for User CPU Apps◦ Ensure safe functionality/recoverability of IVER2
Utilize/Test the IVER2 platform◦ Various Masters Level research projects◦ Spark interest of incoming Freshman (CPE123)
LAIR Development Goals
Shark Tracking◦ Track (chase) a beacon-tagged shark
Phased, Load-Balanced Tasking◦ Used for optimized search, mapping, and data acq.
Communication◦ Using Wi-Fi, Underwater Modems (and possibly more)
roboSim◦ Development environment for research and testing
Current LAIR Projects

IVER2 CommunicationCurrent State and Goals
Cooperative Robots must be able to talk Dynamic environments
◦ Special protocols must be considered in order to successfully transmit from robot A to robot B Delay tolerant Multi-path, redundant ad-hoc routing
Underwater Robots◦ Water absorbs EM therefore acoustic modems
used when submerged (or communicated with other submerged items.)
◦ Acoustic systems still have limited range
Communication Requirements

WiFi (802.11G) Modem◦ Antenna is integrated into tail mast◦ Modem is integrated into Main CPU
Must Remote Desktop to Main CPU to access IVER2 Then Remote Desktop to User CPU to access app
Remote Transmitter for power controller◦ Hard reset and power supply shutoff only
Has caused Windows to corrupt more than once WHOI Acoustic Modem
◦ IVER2’s come modem built in but hasn’t be used◦ Ground/Surface station modem just received
Current IVER2 Communication

Underwater Communication
Source: WHOI Website

Communication Protocols must include◦ Mix of Wi-Fi and Acoustic Modems
◦ Routing of data/packets must be dynamic
◦ Should assume non-continuous connection with base station (therefore ad-hoc system required)
◦ Due to dual systems within the IVER2, extra routing is required
Wi-Fi is on main processor
Acoustic modem is on secondary
IVER2 Comm. Thoughts

Project Driven Development
Push Concept with Task

User a project requiring communication to…◦ Define specifications◦ Encourage development◦ Discover limitations of protocols◦ Find bugs
Research the benefit of strategic communication on Multi-Robot Systems◦ What benefits are achieved
Just data logging? Quicker performance More complete functionality
Project Driven Development
Phased, load-balanced cooperative MRS (Multi-Robot Systems) can achieve tasks…
◦ Quicker More people doing the work (without large overlaps)
◦ More accurately Composited sensor readings (can) reduce error Overlapping work & communication can help in localization
◦ More complete results Can detect changes quicker in a dynamic environment
Quicker detection means less is missed in a highly dynamic world
Phased & Load-Balanced Data Acquisition

Gather Oxygen/Bio data in a body of water◦ Robots will take readings over a 3D region by
oscillating around dimension.
Phased & Load-Balanced Data Acq. (Cont.)
Top View
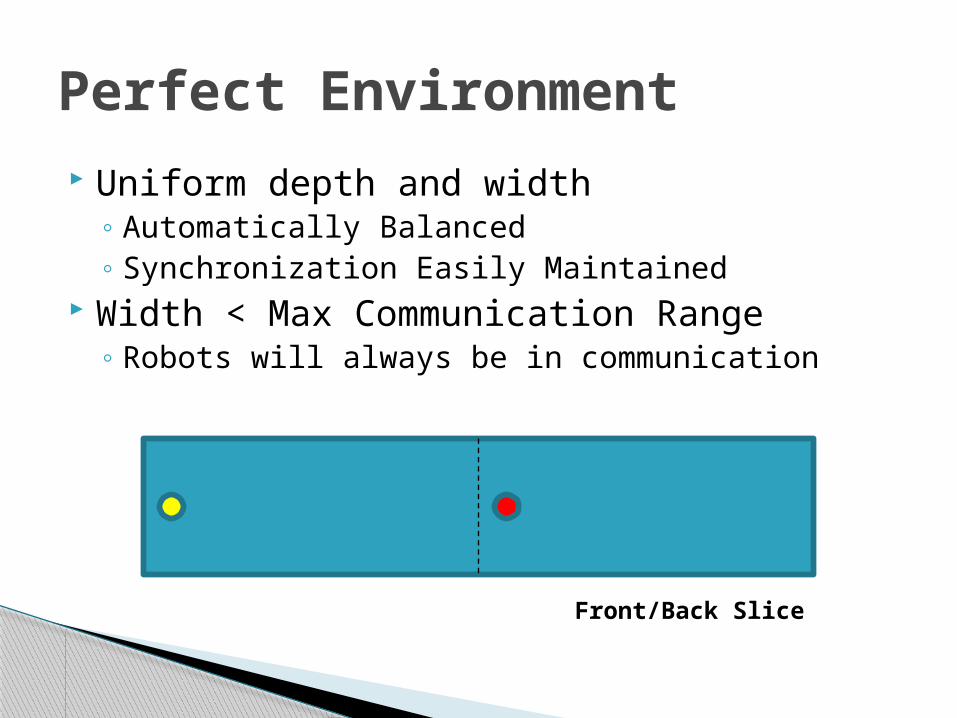
Uniform depth and width◦ Automatically Balanced◦ Synchronization Easily Maintained
Width < Max Communication Range◦ Robots will always be in communication
Perfect Environment
Front/Back Slice

Curved, Uneven Ground and Bay Shape◦ Must Dynamically Balance◦ Synchronization Quickly Lost
Width is Dynamic◦ Robots will not always be in communication
Actual Environment
Top View
Communicate with other robots in order to maximize productivity and minimize delay between data points.
Tolerate communication losses due to submersion, range, or a combination of the two.
Operate in an unknown environment
◦ Mapping on the fly
◦ Absolute Positioning Trust Between Robots
Other Desires
◦ Allow the addition (and removal) of robots on the fly.
◦ Synchronized movements
Project Comm. Demands & Goals

Environment Simulation
Not Just Convenient, Required!

Robots are expensive!◦ Being able to simulate large scale activities
without a large budget allows new projects to be prototyped
Humans make mistakes◦ Bad code in an underwater, flying, or even ground
robots can result in a lost robot ($$)
Researchers can test algorithms/concepts◦ Although only simulated data is being shared with
the robot, we can make it complete enough to test concepts without having to be in the field
◦ Tests are reproducible!
Why Simulate?

A virtual environment that simulates the real world for code development and research.
◦ Real & Virtual Agents can interact/communicate
◦ An agent is composed of modules (C++ classes) New agents can be added New sensors created
“Error” can be added
◦ Agent code is independentof the environment
The roboSim Environment
Source: Sean Forsberg

RoboSim Design OverviewRoboSim
World AgentsDevices
Sensors
Locomotion
Comm.
Physical
Simulated
Beacons
Radios
GIS Terrain Input
Local Area Lat/Long
Each device and agent constructed as a module building on previous to allow
quick creation/modification.
Devices: Feedback based on world & agent instructionsAgents: Objects that interact with the world and are a collection of devices

Object-Oriented Design
modAgent
modDevice
UnderwaterAgent
SurfaceAgent
TorpedoAgent
DiffDriveAgent
IVER2Agent
X80Agent
CommAgent RadialCommAgent WiFiAccessPoint
LocationDevice GPSDevice
LocomotionDevice
EnvSensorDevice
FinDevice
PropellerDevice
DistanceSensor
CommDevice
SonarSensor
WiFiModem
TriBeaconDevice

IVER2 has a dual, independent CPU design with COM based interface
Both CPUs are currently running Windows XP
User CPU reqs.and recvs datausing telnet tothe main
IVER2 System Design
Source: OceanServer Manual
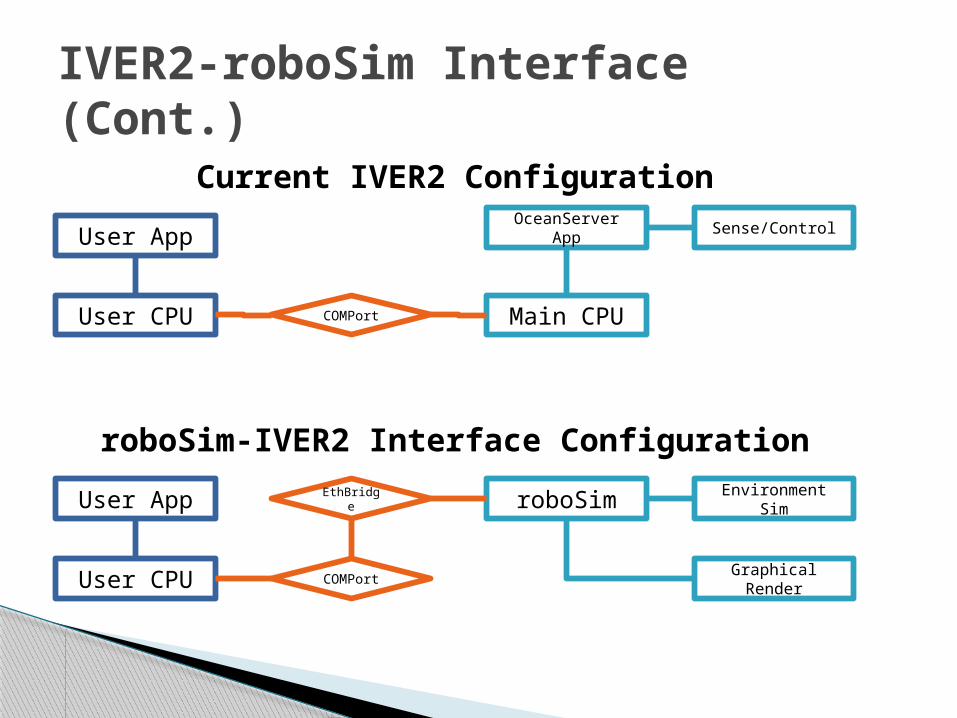
IVER2-roboSim Interface (Cont.)
User App
User CPU COMPort Main CPU
OceanServer App Sense/Control
User App
User CPU COMPort
roboSim Environment SimEthBridge
Graphical Render
Current IVER2 Configuration
roboSim-IVER2 Interface Configuration

Real Terrain Modeling◦ Import GIS (and other data source) topographic
maps (various resolution) Real-time Graphics
◦ Requirement to minimize the polygon/vertex count (aka low-res terrain)
Distance Sensors◦ Require high resolution detail in order to
accurately simulate the environment (aka high-res terrain)
roboSim Challenges

Presentation ReviewWhat Just Happened?!

LAIR = multi-robot development Underwater systems = comm. challenges
◦ Lack of RF based transmission◦ Bandwidth limitations of Acoustic modems◦ Dynamic environments
Multi-robot systems require communications◦ Effective comm. can result in quicker (and more
effective) systems Experiments on expensive platforms are
risky & expensive◦ The IVER2 provides an excellent interface for
simulation.
Overview

Questions!Harassment is Encouraged