the trapped region - aei.mpg.delaan/talks/salamanca.pdf · the trapped region lars andersson albert...
TRANSCRIPT

The trapped region
Lars Andersson
Albert Einstein Instituteand
University of Miami
ERE, Sept. 18, 2008
(joint work with Marc Mars, Walter Simon, Jan Metzger)
Lars Andersson (AEI and UM) The trapped region ERE 1 / 41

Outline
1 Marginally outer trapped surfaces
2 Curvature bounds
3 Existence of MOTS
4 Area bound
5 The trapped region
Lars Andersson (AEI and UM) The trapped region ERE 2 / 41

Overview
I will discuss some recent results on marginally outer trappedsurfaces (MOTS), dynamical horizons and the trapped region.
MOTS are black hole boundaries in GRThey are analogues of minimal surfaces in Riemannian geometry
Curvature boundsBarriers give existence (Proof uses Jang’s equation)
Area bounds, “maximum principle” hold for outermost MOTSApplication: coalescence of black holes
The trapped region can be characterized
Exterior Cauchy problem
Lars Andersson (AEI and UM) The trapped region ERE 3 / 41

MOTS
Notation
(M, g, K ) ⊂ L Cauchy hypersurface in a 3+1 dimensional Lorentzspacetime. Σ spacelike surface in M.
`− `+n
ν
Σ
Declare `+ to be outer
A = 〈∇·ν, ·〉,
χ± = K Σ ± A,
K Σ = K |TΣ×TΣ,
H = ΣtrA, P = ΣtrK Σ = tr K − K (ν, ν), θ± = Σtrχ± = P ± H.
Definition
Σ is a marginally outer trapped surface (MOTS) if θ+ = 0
Lars Andersson (AEI and UM) The trapped region ERE 5 / 41

MOTS
MOTS and singularities
θ+ is the logarithmic variation of area: θ+ = δ`+µΣ/µΣ
Σ MOTS ↔ outgoing null rays marginally collapsing
We call Σ (weakly) outer trapped if (θ+ ≤ 0) θ+ < 0.
Recall NEC: G(v , v) ≥ 0 for any null vector v .
Theorem
Suppose NEC holds. If a marginally outer trapped surface Σ separatesand has noncompact exterior, then L is null geodesically complete.
⇒ MOTS can be viewed as black hole boundaries
The usual definition of trapped surface is θ+ < 0, θ− < 0.
Lars Andersson (AEI and UM) The trapped region ERE 6 / 41
MOTS
Ideas
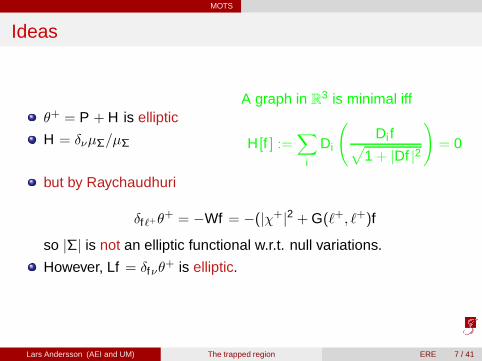
θ+ = P + H is elliptic
H = δνµΣ/µΣ
A graph in R3 is minimal iff
H[f ] :=∑
i
Di
(Di f√
1 + |Df |2
)= 0
but by Raychaudhuri
δf`+θ+ = −Wf = −(|χ+|2 + G(`+, `+)f
so |Σ| is not an elliptic functional w.r.t. null variations.
However, Lf = δfνθ+ is elliptic.
Lars Andersson (AEI and UM) The trapped region ERE 7 / 41

MOTS
Barriers
If there are barriers, there is a minimal (H=0) surface between
H > 0
H = 0
H < 0
Proof by minimization
Lars Andersson (AEI and UM) The trapped region ERE 8 / 41
MOTS
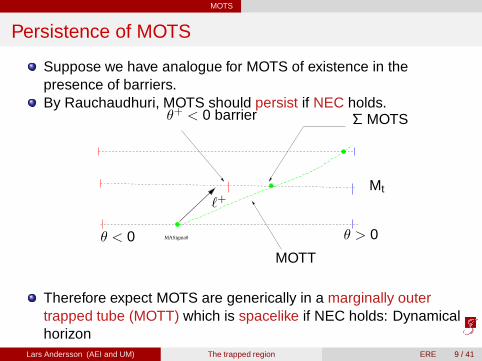
Persistence of MOTS
Suppose we have analogue for MOTS of existence in thepresence of barriers.By Rauchaudhuri, MOTS should persist if NEC holds.
MASigma0
`+
θ+ < 0 barrier
Mt
Σ MOTS
θ < 0 θ > 0
MOTT
Therefore expect MOTS are generically in a marginally outertrapped tube (MOTT) which is spacelike if NEC holds: Dynamicalhorizon
Lars Andersson (AEI and UM) The trapped region ERE 9 / 41

MOTS
Trapped region
The trapped region T is the union of all weakly outer trapped domains
T = ∪Ω ⊂ M : ∂Ω is weakly outer trapped
Theorem (Andersson & Metzger,2007)
∂T is a MOTS, the uniqueoutermost MOTS
∂T MOTS
θ+ ≤ 0
T
Ω
Theorem (Galloway, 2008)
Suppose NEC holds. Then the outermost MOTS is an S2
Lars Andersson (AEI and UM) The trapped region ERE 10 / 41

MOTS
Stability operator
Let Lf = δfνθ+. Then
Lf = −∆f + 2S(∇f ) + f [div S − |S|2 −12|χ+|2 +
12
Σ Sc +(µ − J(ν)]
where S(X ) = K (X , ν).L is the analogue of the minimal surface stability operator.Facts:
L is 2:nd order elliptic, non-self adjoint in general,∃! principal eigenvalue λ ∈ R, with positive eigenfunction φΣ locally outermost ⇒ λ ≥ 0λ ≥ 0 ⇔ ∃f ≥ 0 : Lf ≥ 0 ⇒ if λ ≥ 0 max. principle holds.
Definition
Σ is stable if λ ≥ 0
Σ locally outermost ⇒ Σ is stable.
Lars Andersson (AEI and UM) The trapped region ERE 11 / 41

MOTS
Local existence of horizons
Theorem (Andersson, Mars, & Simon, 2005)
Suppose Σ is strictly stable (λ > 0). Then ∃ MOTT H containing Σ. His weakly spacelike if NEC holds.
Proof is an application of the implicit function theorem.
θ+ ≤ 0 θ+ ≥ 0MOTT H outermost MOTS jumps
`+
Mt
This is a local result. The outermost MOTS can jump.Lars Andersson (AEI and UM) The trapped region ERE 12 / 41

MOTS
Bifurcation
As a MOTS is created, the MOTT bifurcates in general.
θ+ ≤ 0 θ+ ≥ 0
Mt
TheoremThe above picture holds assuming W 6= 0.
Lars Andersson (AEI and UM) The trapped region ERE 13 / 41

Curvature bounds
Curvature bounds
Theorem (Andersson & Metzger, 2005)
Let Σ be a stable MOTS. Then
|A| ≤ C(|Riem |C0 , |K |C1 , inj(M))
Proof ingredients:
Many ideas from (Schoen, Simon, & Yau, 1975).
symmetrized stability (Galloway & Schoen, 2006)
Simons identity
Kato inequality
Hoffmann-Spruck Sobolev inequality
Stampacchia iteration
local area bounds (Pogorelov)
Lars Andersson (AEI and UM) The trapped region ERE 15 / 41

Existence of MOTS
Jang’s equation
Consider R × M,with metric ds2 + g
Define K by pullbackLet M be the graph of f .
s M = s = f
ν
M
On M we have induced mean curvature H and P = trM K .
Jang’s equation is J [f ] := H−P = 0
Analogue of the equation θ+ = 0
Lars Andersson (AEI and UM) The trapped region ERE 17 / 41

Existence of MOTS
Jang’s equation
Translation invariance: J[f ] = J[f + t] ⇒ stability operator hasLφ = 0, with φ = 〈ν, e4〉
L is the analogue of the minimal surface stability operator for M(Schoen & Yau, 1981):
local curvature bounds (⇒ compactness)existence proof using capillarity deformation & Leray-SchauderH− σP = τ fσ,τ
deform σ from 0 to 1 → fτlet τ 0→ get converence of subsequence of fτ to solution f .
Lars Andersson (AEI and UM) The trapped region ERE 18 / 41

Existence of MOTS
Jang’s equation
Solution has blowups in general. Blowups project to MOTS.
νν
Mθ+ = 0
νν
Mθ− = 0
Therefore Jang’s equation can be used to prove existence of MOTS.(Andersson & Metzger, 2007): Blowup surfaces are stable MOTS
Lars Andersson (AEI and UM) The trapped region ERE 19 / 41

Existence of MOTS
Existence of MOTS
Theorem (Schoen, 2004; Andersson & Metzger, 2007)
Suppose M is compact with barrier boundaries ∂±M, such that
θ+[∂−M] < 0, θ+[∂+M] > 0
Then M contains a MOTS Σ
This is the analogue of the barrier argument for existence of minimalsurfaces.Proof makes use of a Dirichlet problem for Jang’s equation.(Eichmair, 2007) has studied the Plateau problem for MOTS usingPicard’s method.
Lars Andersson (AEI and UM) The trapped region ERE 20 / 41

Existence of MOTS
Existence of MOTS
∂+M
∂−M
θ+ > 0
θ+ < 0
θ+ = 0Σ
Lars Andersson (AEI and UM) The trapped region ERE 21 / 41

Existence of MOTS
Existence of MOTS
Proof is by solving a sequence of Dirichlet problems for Jangs equationwhich forces a blowup solution.
J [f ] = 0, f
∣∣∣∣∂±M
= ∓Z
Let Z → ∞
Converges tosolution with blowups
Z
−Z
∂−M ∂+M
J = 0
Lars Andersson (AEI and UM) The trapped region ERE 22 / 41

Existence of MOTS
Existence of MOTS
Proof uses bending to get H > 0 at ∂M (needed to have barriersfor gradient control at the boundary)
M
∂+Mθ+ > 0
(M, g, K )
H > 0
Solution must blow up somewhere ⇒ ∃ MOTS
We have foliation by barriers near ∂M
⇒ can show the MOTS constructed are in the undeformed regionof M
Can allow θ+[∂−M] ≤ 0: deform data inside ∂−M
Lars Andersson (AEI and UM) The trapped region ERE 23 / 41

Existence of MOTS
Application: Persistence of MOTS
MASigma0
`+
θ+ < 0 barrier
Mt
Σ MOTS
θ < 0 θ > 0MOTT
Theorem (Andersson, Mars, Metzger, & Simon, 2008)
Let L be a spacetime which satisfies NEC. Let Mt, be a Cauchyfoliation of L, and assume we have outer barriers.If M0 contains a MOTS, then each Mt , t ≥ 0 contains a MOTS.
It seems natural to view the collection of MOTS as the black holeboundary in L.Further regularity and continuation results for MOTT, cf. (Andersson etal., 2008).
Lars Andersson (AEI and UM) The trapped region ERE 24 / 41

Area bound
Area bound
Theorem (Andersson & Metzger, 2007)
Suppose M has outer barrier. There is a constantC = C(|Riem |C0 , |K |C1 , inj(M), Vol(M)) such that for a boundingMOTS Σ in M, either
|Σ| ≤ C
or there is a MOTS Σ′ outside Σ.
If |Σ| is very large, due to curvature bounds and the bounded Vol(M), itmust nearly meet itself from the outside ⇒ outer injectivity radius i+(Σ)must be small.
Lars Andersson (AEI and UM) The trapped region ERE 26 / 41

Area bound
Area bound
Surgery and heat flow:
Σ
ν
ν
θ+ < 0θ+ < 0
ν
ν
i+(Σ)
Glue in a neck with θ+ < 0. θ+ heat flow: x = −θ+ν gives Σs,s ≥ 0.
Maximum principle ⇒ Σs outside Σ, with θ+[Σs] < 0 for s > 0.
Lars Andersson (AEI and UM) The trapped region ERE 27 / 41

Area bound
Area bound
Σs is an inner barrier ⇒ apply existence result
⇒ ∃ MOTS Σnew outside Σ
Each step eats up at least δVol of the outside volume:Voloutside(Σnew) ≤ Voloutside(Σ) − δVol
⇒ only finitely many steps
⇒ eventually get Σ0 outside Σ with outer injectivity radiusi+(Σ0) > δ∗.
Σ0 has the claimed area bound. To estimate the area, use theestimates on curvature and i+ to estimate the volume of a tubearound Σ from below (divergence theorem) in terms of |Σ|.
This tube must have volume bounded by Vol(M).
Lars Andersson (AEI and UM) The trapped region ERE 28 / 41
Area bound
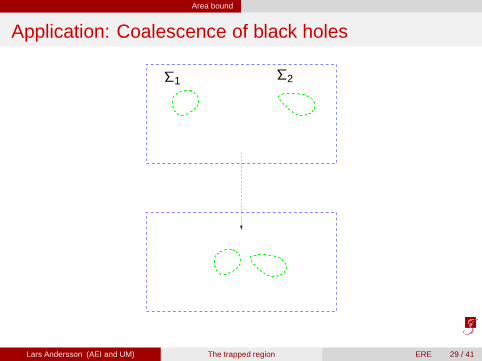
Application: Coalescence of black holes
Σ1 Σ2
Lars Andersson (AEI and UM) The trapped region ERE 29 / 41

Area bound
Application: Coalescence of black holes
By the gluing result: if Σ1,Σ2 are sufficiently close, there is a MOTS Σsurrounding them.
Σ
This gives a “maximum principle for MOTS”.The usual maximum principle does not apply for MOTS whichmeet on the outside.
Lars Andersson (AEI and UM) The trapped region ERE 30 / 41

The trapped region
The trapped region
Definition
Let (M, g, K ) be an AF data set. The trapped region is
T = ∪Ω⊂M∂Ω is weakly outer trapped
Theorem (Andersson & Metzger, 2007)
If ∃ Ω ⊂ M, with ∂Ω weakly outer trapped, then T has smoothboundary ∂T, with θ+[∂T] = 0. In particular, ∂T is the uniqueoutermost MOTS in M.
Lars Andersson (AEI and UM) The trapped region ERE 32 / 41

The trapped region
The trapped region
Replace T by
T = ∪Ωθ+[∂Ω] ≤ 0, and i+(∂Ω) ≥ δ∗
For the collection of subsets defining T we have compactness ⇒∂T = Σ is a MOTS.
LemmaT ⊂ T .
Lars Andersson (AEI and UM) The trapped region ERE 33 / 41

The trapped region
The trapped region
To see this, suppose ∃ WOT Ω * T . We can argue that this meansΩ ∩ T 6= 0.
θ+ < 0 by smooting
ΩT
Smoothing gives a barrier and hence there is a MOTS outside. Thiscan be taken to be in T . So T = T .
Lars Andersson (AEI and UM) The trapped region ERE 34 / 41
The trapped region
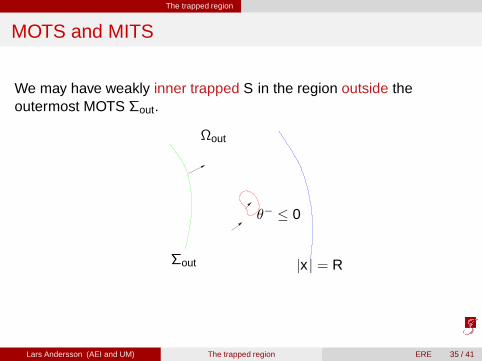
MOTS and MITS
We may have weakly inner trapped S in the region outside theoutermost MOTS Σout.
Ωout
Σout
θ− ≤ 0
|x | = R
Lars Andersson (AEI and UM) The trapped region ERE 35 / 41

The trapped region
MOTS and MITS
Then ∃! outermost MITS Sout in Ωout
By (Galloway, 2008),Σout, Sout ∼ S2.
Ωout
Sout
Σout
θ− ≤ 0
|x | = R
There is a solution to Jang’s equation which blows up precisely atΣout and Sout and → 0 at |x | = ∞.
This result can be used to complete the proof of the positive masstheorem (Schoen & Yau, 1981) without deforming the Cauchydata.
Lars Andersson (AEI and UM) The trapped region ERE 36 / 41

The trapped region
Exterior Cauchy problem
Suppose NEC holds + suitable matter equation.
Exterior region
Mt
Σ = ∂T
Expect: local well-posedness for the exterior IVP, due to curvaturebounds for ∂T
Potentially interesting for black hole evolutions and stability of Kerr.
Lars Andersson (AEI and UM) The trapped region ERE 37 / 41

The trapped region
Concluding remarks
Bray proposed Generalized Apparent Horizons: H = |P| and ageneralized Jang’s equation, as part of an approach to the generalPenrose Inequality. (Eichmair, 2008) proved existence ofoutermost GAH. These are outer minimizing. However, not clearhow they are related to black holes.Large families of GAH conditions can be treated using thetechniques discussed hereGlobal properties of MOTT may be relevant for understanding thestrong field Cauchy problem for the Einstein equations.The known conditions for existence of MOTS in a Cauchy data set(Schoen & Yau, 1983; Yau, 2001; Galloway & O’Murchadha, 2008)involve nonvacuum data.A better understanding of conditions for the existence of MOTS invacuum, due to concentration of curvature terms of, say, curvatureradii, conformal spectral gap, etc. is needed.
Lars Andersson (AEI and UM) The trapped region ERE 38 / 41

The trapped region
References I
Andersson, L., Mars, M., Metzger, J., & Simon, W. (2008). Timeevolution of marginally trapped surfaces.
Andersson, L., Mars, M., & Simon, W. (2005). Local existence ofdynamical and trapping horizons. Phys. Rev. Lett., 95, 111102.
Andersson, L., & Metzger, J. (2005). Curvature estimates for stablemarginally trapped surfaces.
Andersson, L., & Metzger, J. (2007). The area of horizons and thetrapped region.
Eichmair, M. (2007). The plateau problem for apparent horizons.(arXiv.org:0711.4139)
Eichmair, M. (2008). Existence, regularity, and properties ofgeneralized apparent horizons. (arXiv.org:0805.4454)
Galloway, G. J. (2008). Rigidity of marginally trapped surfaces and thetopology of black holes. Comm. Anal. Geom., 16(1), 217–229.
Lars Andersson (AEI and UM) The trapped region ERE 39 / 41

The trapped region
References II
Galloway, G. J., & O’Murchadha, N. (2008). Some remarks on the sizeof bodies and black holes. Class. Quant. Grav., 25, 105009.
Galloway, G. J., & Schoen, R. (2006). A generalization of Hawking’sblack hole topology theorem to higher dimensions. Comm. Math.Phys., 266(2), 571–576.
Schoen, R. (2004). talk given at the Miami Waves conference, Jan.2004.
Schoen, R., Simon, L., & Yau, S. T. (1975). Curvature estimates forminimal hypersurfaces. Acta Math., 134(3-4), 275–288.
Schoen, R., & Yau, S. T. (1981). Proof of the positive mass theorem. II.Comm. Math. Phys., 79(2), 231–260.
Schoen, R., & Yau, S. T. (1983). The existence of a black hole due tocondensation of matter. Comm. Math. Phys., 90(4), 575–579.
Lars Andersson (AEI and UM) The trapped region ERE 40 / 41

The trapped region
References III
Yau, S. T. (2001). Geometry of three manifolds and existence of blackhole due to boundary effect. Adv. Theor. Math. Phys., 5(4),755–767.
Lars Andersson (AEI and UM) The trapped region ERE 41 / 41