the puma 260 and project 1medesign.seas.upenn.edu/uploads/courses/robotics09puma.pdfmeam 520 the...
TRANSCRIPT

MEAM 520The Puma 260 and Project 1
Katherine J. Kuchenbecker, Ph.D.General Robotics, Automation, Sensing, and Perception Lab (GRASP)
MEAM Department, SEAS, University of Pennsylvania
Lecture 9: October 4, 2012


A few good questions about DH parameters...


The Denavit-Hartenberg ConventionPage 78 in SHV
(DH1) The axis xi is perpendicular to the axis zi-1
(DH2) The axis xi intersects the axis zi-1
The Denavit-Hartenberg ConventionPage 78 in SHV
(DH1) The axis xi is perpendicular to the axis zi-1
(DH2) The axis xi intersects the axis zi-1


The Denavit-Hartenberg ConventionPage 78 in SHV
(DH1) The axis xi is perpendicular to the axis zi-1
(DH2) The axis xi intersects the axis zi-1



Questions ?

Inverse Orientation Kinematics

!5
e
cb
d
a
f
z0
x0
a = 13.0 inb = 3.5 inc = 8.0 ind = 3.0 ine = 8.0 inf = 2.5 in
all joints are shown at 0°except joint 5, which is
shown at !5 = -90°
!4
!6
!3
!2
!1
z6
x6
!5
e
cb
d
az0
x0
a = 13.0 in.b = 3.5 in.c = 8.0 in.d = 3.0 in.e = 8.0 in.f = 2.5 in.
!4
!3
!2
!1
f
!6
z6
x6

Given rotation matrix R, find thejoint angles that put the end-effector
in the desired orientation.

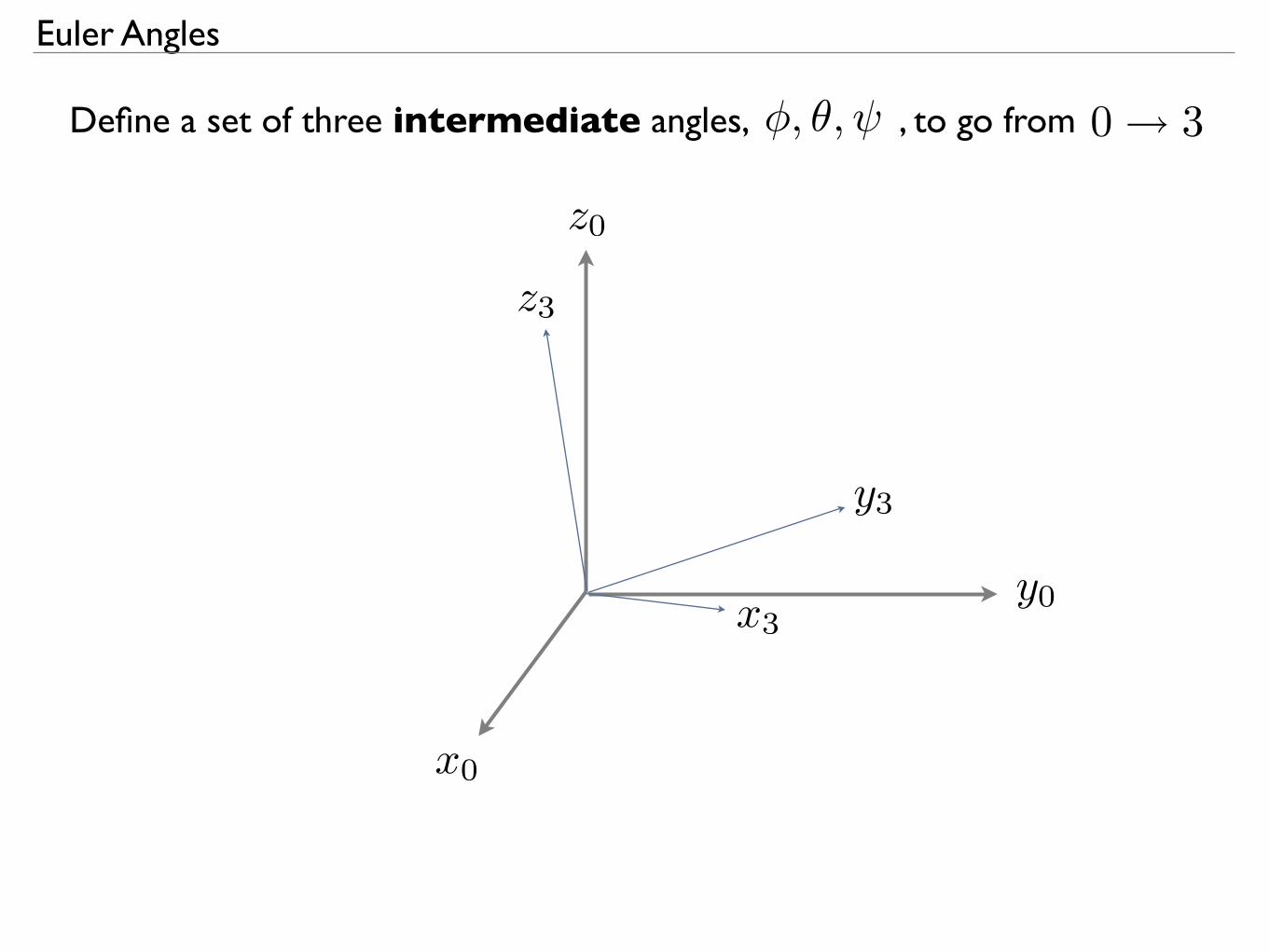
Euler Angles
x0
y0
z0
z3
y3
x3
Define a set of three intermediate angles, !, ", # , to go from 0 ! 3

Euler Angles
x0
y0
z0
y1
x1
z1
about! z0step 1: rotate by
!

!
Euler Angles
y1
x1
z1
aboutstep 2: rotate by ! y1
x2
y2
z2
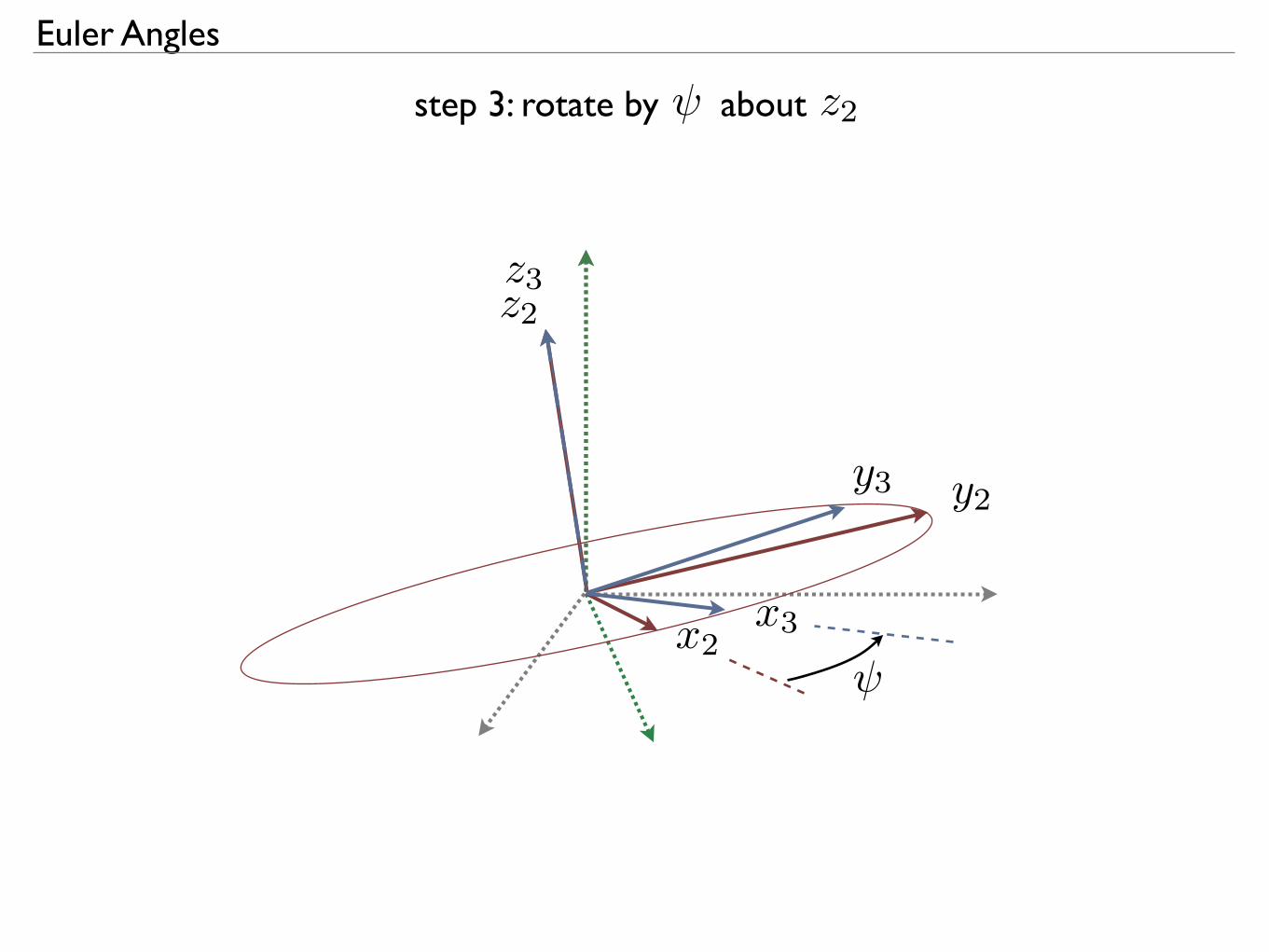
Euler Angles
x2
y2
z2
aboutstep 3: rotate by z2!
!
x3
z3
y3

Euler Angles to Rotation Matrices
R = Rz,! Ry," Rz,#
=
!
"
c!c"c# ! s!s# !c!c"s# ! s!c# c!s"
s!c"c# + c!s# !s!c"s# + c!c# s!s"
!s"c# s"s# c"
#
$
(post-multiply using the basic rotation matrices)
=
!
"
c! !s! 0
s! c! 0
0 0 1
#
$
!
"
c" 0 s"
0 1 0
!s" 0 c"
#
$
!
"
c# !s# 0
s# c# 0
0 0 1
#
$

=
!
"
c!c"c# ! s!s# !c!c"s# ! s!c# c!s"
s!c"c# + c!s# !s!c"s# + c!c# s!s"
!s"c# s"s# c"
#
$
The book explains how to calculate the three angles given R: see SHV pages 55-56


Questions ?

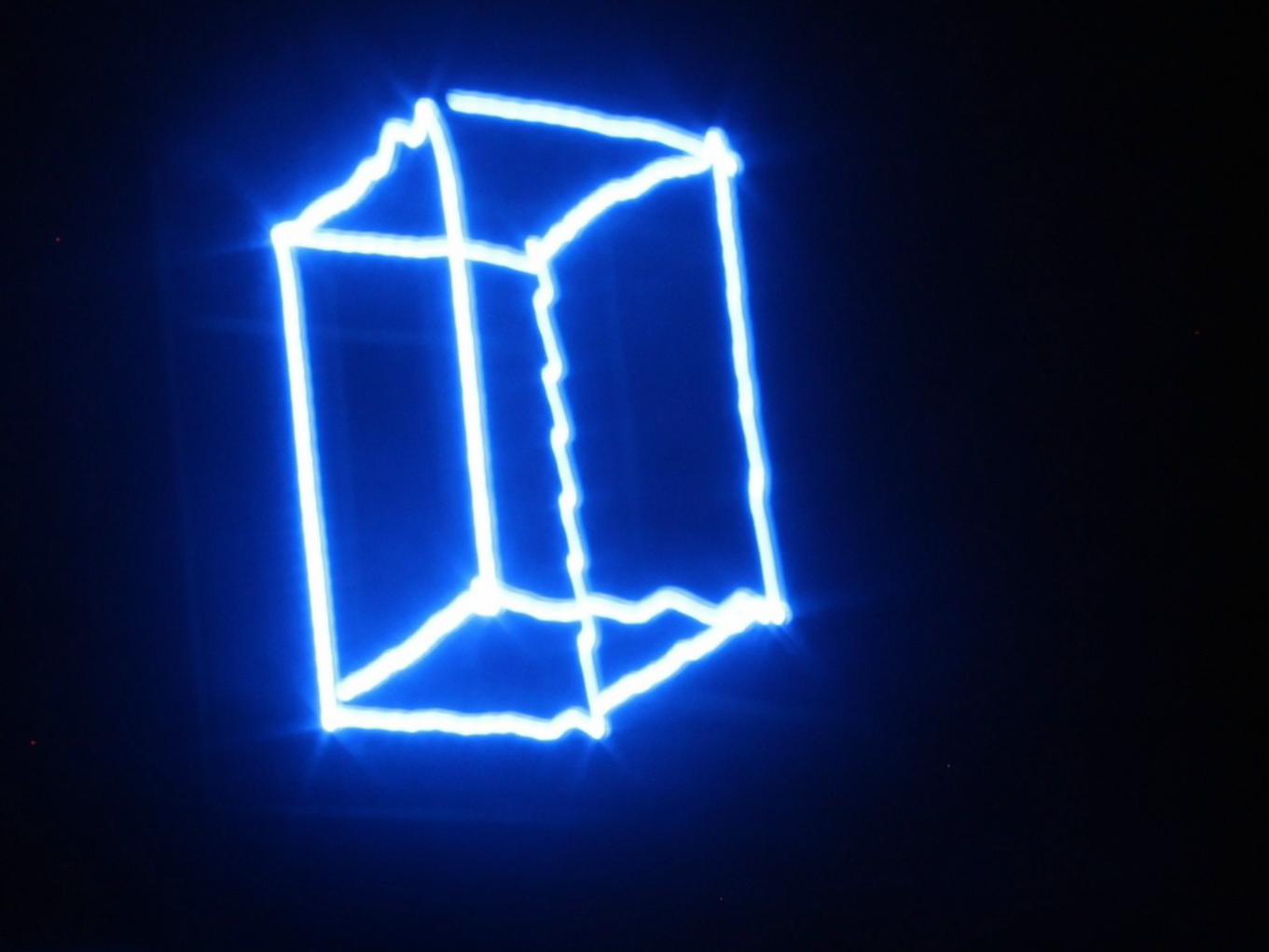
Project 1Light Painting with the Puma 260

• The Puma 260 has been equipped with a tri-color LED end-effector.
• Taking long-exposure photos of the Puma moving in a darkened room produces works of art known as “light paintings.”
• Your job is to work in a team of three to create a beautiful Puma light painting.



What knowledge do you need to do this project?

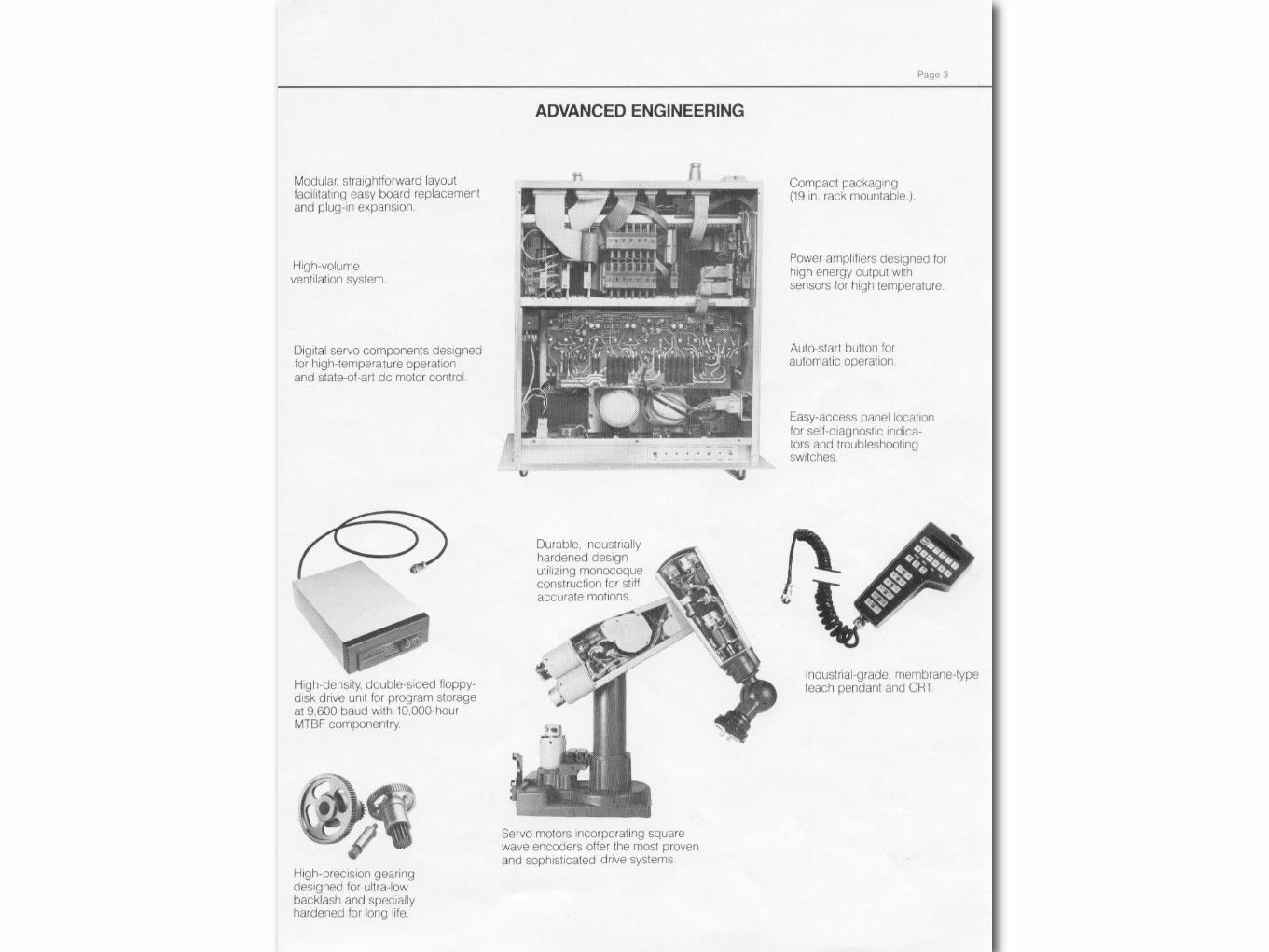
PUMA260Unimation
Slides created by Jonathan Fiene






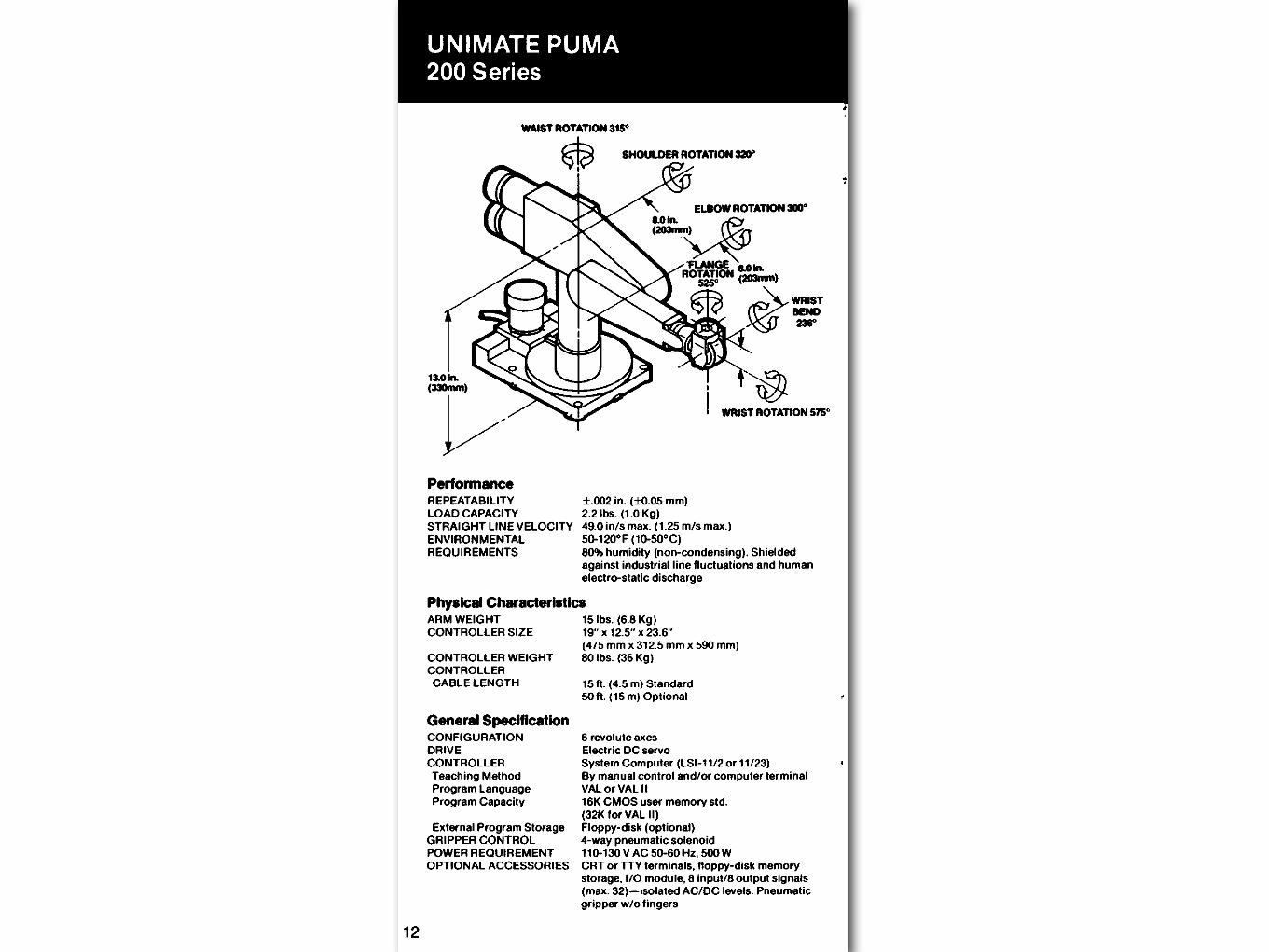

What does the Puma’s workspace look like?


How does the Puma work?





First Step in Project 1
Derive full inverse kinematics for the Puma 260
Given desired x, y, z position of LED and Euler angles for the end-effector, plus the current joint angles of the robot, calculate all the joint angles needed to reach the
new desired configuration
Full assignment and MATLAB starter code will be distributed around Tuesday of next week
You will do this in teams of three

Team FormationYou will work in a team of 3
(33 teams of 3, only one team of 4)
Each team must have at least one undergraduate and at least one graduate student.
Submatriculants count as undergraduates.(52 undergrads, 51 grads)
Try to have two MEAM students and one non-MEAM student on each team
(71 MEAM, 33 non-MEAM)
Pick your team by 5pm on Thursday, October 11(one week from today)
Speed Meeting Activity
Stand up, and leave your stuff where it is.
All undergraduates stand around the edges of the room.
Grad students - go stand in front of an undergraduate.
Introduce yourselves: name, major, favorite robot.
Rotate! Rotate! Rotate! Rotate!