the mars technology program
TRANSCRIPT

Proceeding of the 6th International Symposium on Artificial Intelligence and Robotics & Automation in Space: i-SAIRAS 2001, Canadian Space Agency, St-Hubert, Quebec, Canada, June 18-22, 2001.
The Mars Technology Program*
James A. Cutts, Samad A. Hayati, Donald Rapp and Chengchih ChuJet Propulsion Laboratory
California Institute of Technology, Pasadena, CA 91109and
Joeseph C. Parrish, David B. Lavery and Ramon P. DePaulaNational Aeronautics and Space Administration
Washington, DC [email protected]
Keywords:
Mars, technology, exploration, lander, rover, samplereturn, technology plan, technology infusion
Abstract
The Mars Technology Program (MTP) is a NASA-widetechnology development program managed by JPL. It isdivided into a Focused Program and a Base Program.The Focused Program is tightly tied to proposed MarsProgram mission milestones. It involves time-criticaldeliverables that must be developed in time for infusioninto the proposed Mars 2007 and Mars 2011 missions.This program bridges the gap between technology andprojects by vertically integrating the technology workwith pre-project development in a project-likeenvironment with critical dates for technology infusion.A Base Technology Program attacks higher risk/higherpayoff technologies not in the critical path of missions.
1. Introduction
The NASA Mars Exploration Program has plans toimplement a series of ambitious missions with launchesevery two years, culminating in a sample return missionwith a launch date in 2011. Launches will alternatebetween Orbiters and Landers at each Mars launchopportunity. Orbiters would be launched on 4-yearcenters in 2001, 2005, 2009, …, and will be used astelecommunication relay stations after they carry outtheir primary science missions. Landers would belaunched on 4-year centers in 2003, 2007, 2011,….
A series of Scout missions have been proposed forlaunch on 4-year centers starting in 2007. Thesemissions would be competed for by the sciencecommunity. It is possible that they might involveairborne vehicles, balloons or networks of small landers,but the strongest proposals will be funded regardless ofthe approach.
The 2003 Mars Exploration Rovers (MER) missionincludes two rovers that are far more capable than thePathfinder rover. The proposed 2007 Smart Landermission would introduce a number of significant
technological innovations.1 The most important of theseis the ability to make a safe landing at any locality onMars. These technology innovations would be carriedforward into the 2011 mission, which is planned to be asample return mission.
The enabling technologies for the proposed 2007 and2011 surface missions will be addressed in a FocusedTechnology Program that is tightly tied to proposedMars Program mission milestones. It involves time-critical deliverables that must be developed in time forinfusion into the proposed Mars 2007 and Mars 2011missions. This program bridges the gap betweentechnology and projects by vertically integrating thetechnology work with pre-project development in aproject-like environment. The technology work includesvalidation and risk reduction through simulation,laboratory and field tests and the use of flightexperiments when required.
In addition, a Base Technology Program will addressenhancing technologies for missions proposed for 2007and 2011, critical capabilities for Scout/competitive andOrbiter missions, and capabilities for all missionsbeyond 2011. The Base Program stresses breakthroughtechnology elements that are not in critical path ofmissions. It will address technology needs that are lessmature and higher risk (and higher payoff) than thoseconstituting the Focused Program. The Base Programincludes collaborative programs with the Outer PlanetsProgram, competitive elements, and leveragedtechnology programs with other funding sources.
The Focused Technology Program and the BaseTechnology constitute the elements of the MarsTechnology Program (MTP) that is managed by JPL,but which is carried out by the full NASA community.The relationship of the Focused Technology Programand Base Technology Program to the suite of plannedNASA Mars missions for the next decade is illustratedin Figure 1.

In order to develop capabilities for these missions andbeyond, the NASA Mars Technology Program is beingimplemented under JPL leadership. This Program’s goalis to develop and infuse key technologies needed toenable proposed future Mars missions. In this paper, asynopsis of the plan for implementing the MarsTechnology Program is provided.
2. Focused Technology Program
2.1 Mars 2007 Smart Lander
One of the main goals is to develop the capability toland safely near any chosen site (including higherelevations) in order to provide a global access to Mars.To achieve this ability to land safely at any locality onMars, the entire process of entry, descent and landingwas reviewed and innovations are planned to providethe needed capabilities.
The present state of the art for EDL on Mars utilizesradio-based approach navigation, no control of the liftvector during entry, a single stage parachute, and hazardtolerance only to the extent that either airbags or landingstruts are utilized. There is no hazarddetection/avoidance capability. Variants of thisapproach were used on Viking and Pathfinder and willbe used on the Mars 2003 mission. The errors inapproach navigation propagate through the trajectory,
resulting in a landing error ellipse ranging from 100 kmcross range to 300 km along the downrange vector. Thepayload mass that can be delivered using existing oranticipated launch vehicles with this system is limited to~ 70 kg.
Precision landing reduces the risk of encounteringhazardous areas such as large craters and steep canyonsat any given region of Mars where it is desired to land.
Our goal is to develop new technology to reduce thelanding error ellipse to smaller than 3 x 10 km. Inaddition the payload mass will be raised to ~ 300 kg. Toachieve this goal, each step of the EDL process isupgraded with new technology. Figure 2 illustrates thesteps involved in precision EDL. Each step is beingdeveloped with advanced technology, with systemsintegration used to assure that all the pieces fit together.
To achieve this goal, three complementary technologiesare being developed:
• Precision landing
• Hazard avoidance
• Robust landing
Focused Program• Enable MSL and MSR• Include risk reduction and validation• Run like a project
Base Program• Breakthrough technologies• Broad impact• Support Scouts• Includes collaboration with other sponsors
Mars Express
Figure 1. Contributions of the Focused and Base Programs to Mars missions.
Page 2

2.1.1 Precision Landing
A new optical navigation camera is being developed touse the Martian moons Phobos and Deimos as referencetargets for precise entry. A lifting entry vehicle is beingdeveloped with L/D ~ 0.25 that is capable of activelyguiding itself from entry to parachute deploymentdespite uncertainties in the entry conditions,atmospheric density profile, winds and aerodynamicperformance (Figure 3). A two-stage parachute systemwill be developed with the subsonic parachute havingthe potential for para-guidance. Improved descentpropulsion will be achieved by recapturing Vikingtechnology with new miniaturized components.
2.1.2 Hazard Avoidance
Hazard avoidance provides an “eyes wide open”capability at landing. The overall process is illustratedin Figure 2. This makes it possible to make last-minuteadjustments to landing location to avoid large craters,large rocks and steep local slopes. (Figure 4)
The MTP will develop an integrated terminal guidance,navigation and control system that predicts the descentflight path after the subsonic parachute is deployed,detects hazards such as rocks and slopes using activesensors, and after jettisoning the parachute, steers the
lander to a safe landing area. A RADAR sensing systemfor 0-7 km altitudes will be developed to generate initialterrain maps and create initial estimates of the landingarea at ~ 7 km altitude. When the capsule descends to ~1.5 km, LIDAR is used to augment the RADAR terrainmaps, and alternate landing sites are designated ifhazards are detected. Field tests will be conducted withrocket sled and helicopter test platforms to validatethese technologies.
Figure 3. Schematic of Controlled Entry
Deploy hypersonic chute @ 10-12 km
Jettison backshell & hyper chute (7-9 km)
Deploy subsonic chute; jettison heat shield (7-9 km)
Generate terrain map with RADAR; compute landing area (7-9 km)
Generate terrain map with LIDAR and RADAR; Designate safe landing area (1.5 km)
Jettison subsonic chute, ignite descent engines (.5-.7 km) 30- 45 sec to touchdown
Continue computing reachable landing site ellipse. Compute desired acceleration to achieve touchdown condition
Designate a new landing site, if available, to avoid hazards
Descend to 15 m above landing site
Descend at constant acceleration
Shut engine 1 m above surface
Figure 2. Schematic steps involved in precision descent and landing.
Page 3

2.1.3 Robust Landing
Once landing is committed to, this technology makes itpossible to tolerate the unexpected or provide resilienceto failures in either precision landing or hazardavoidance systems (Figures 5 and 6). Two approachesare under study, one involving airbags and the other apallet system. A down-select to choose the optimumapproach is expected by the end of FY2001.
2.1.4 Long Life Surface Power
There are two potential approaches for surface power onMars: radioisotope power and solar photovoltaic power.The Viking missions used small radioisotopethermoelectric generators (RTGs) as power sources. TheMars Pathfinder mission utilized solar photovoltaicpower. Each of these approaches has advantages anddisadvantages, with significant implications for missiondesign.
Solar power may be feasible for some surface missionson Mars. Surface missions powered by photovoltaicscarry out most operations during a ~ 7 hour periodcentered on solar noon, and use batteries to providesurvival levels of power overnight. The feasibleduration of Mars surface missions powered by solarenergy depends on:
• latitude and season• dust accumulation on photovoltaic arrays• battery life
Dust accumulation is expected to be the majorimpediment to long life solar powered missions. Anumber of potential methods for dust mitigation areunder consideration by the MTP including rollabletransparent covers, blowers, wipers, etc. Tests onseveral approaches will be conducted in simulated Marsenvironments. The MTP is also planning to developphotovoltaic cells optimized for the spectrum on theMars surface that is depleted at shorter wavelengths.
Battery technology is a critical technology for Marssurface missions to provide routine overnight survival,and survival during occasional dust storms. The MTPincludes technology to develop batteries that canproduce more cycles at lower temperatures.
Some future Mars missions will require radioisotopepower. Radioisotope power has a number of advantagesover solar power:
• Continuous power source - no overnight survivalmode - batteries for load balancing, not survival
• Impervious to dust accumulation, dust storms,shadows from canyon walls, etc.
• Virtually unlimited lifetime; independent of latitude
However, there are also disadvantages to radioisotopepower:
Figure 4. Schematic Hazard Avoidance
Figure 5. Schematic Pallet Lander
Figure 6. Schematic Air Bag Lander
Page 4

Need to reject excess heat from aeroshell during cruise,entry, descent and landing.
Radioisotope power is not easily scalable, whereasphotovoltaic power is easily scalable.
Radioisotope power is much heavier than photovoltaicpower when compared at peak power rates (4.5 We/kgvs. >50 We/kg).
Some radioisotope power systems are expensive, andavailability of radioisotopes is uncertain.
In order to greatly reduce the amount of heat that mustbe rejected during cruise, entry, descent and landing,and to greatly reduce the amount of radioisotopesneeded at any power level, the MTP is providing someof the funds needed for further long-term developmentof the highly efficient Stirling converter.
2.2 Mars 2011 Sample Return
Although, the ultimate architecture of the Mars 2011Sample Return mission is still not settled, the pivotalcapabilities that must be developed to enable any MarsSample Return mission are understood. Thesecapabilities include those developed for the Mars 2007Smart Lander, as well as technology specific to samplereturn. The Mars Technology Program will developneeded technology for the proposed Mars 2011 SampleReturn mission, and where aspects of the missionremain undecided, will provide technical data andanalysis to assist the Mars Program SystemsEngineering Team (MPSET) to make these decisions.Sample return technology is divided into the followingfive elements.
2.2.1 Forward Planetary Protection
Forward planetary protection will protect againsttransporting Earth-organisms to Mars that could (1)contaminate the planet, or (2) which could appear inreturned samples from Mars, or (3) which couldinterfere with in situ instruments attempting to detectlife on Mars. Technology will be developed to producea robust cleaning method. This will be accompanied bya rapid method for bio-burden validation. It is hoped touse a H2O2 plasma sterilization scheme to kill extrememicrobes on hardware surfaces. Cleaning andsterilization methods will be validated by tests onhardware subassemblies.
2.2.2 Mars Ascent Vehicle (MAV)
The Mars Ascent Vehicle must transfer clean samplesfrom the surface of Mars to an Earth Return Vehiclelocated either Mars orbit or on an Earth-boundtrajectory. The various alternatives for a MAV rocketapproach (solid, liquid, hybrid, cryo, etc.) are beingcompared by systems analysis. A down-select to asingle approach will be made during FY2001. This
system will be designed, built and tested with a sub-orbital flight. (Figure 7)
2.2.3 Rendezvous and Sample Capture
An autonomous sample rendezvous and capture systemmust be developed with the ability to autonomouslylocate, track and capture a small sample canister in Marsorbit or deep space for return to Earth. A LIDAR sensoris under development for utilization in the autonomoussample rendezvous and capture system.
2.2.4 Sample Containment & Earth Return
In order to carry out a sample return mission,technology must be developed to provide securecontainment of the sample, while preventing anypossible Mars organisms from being inadvertentlyreleased into the Earth’s environment. In order toaccomplish this, the chain of contact from Mars to Earthmust first be broken without breaking the seal on thecontainer. Two complementary techniques forsterilizing exposed sealing plane edges in the airlockbreak-the-chain concept are being evaluated. One usesfluorine gas to sterilize the exposed Martian surfaces.The other uses explosive welding to sterilize and sealthe exposed surfaces. Further work will bring thefluorine technology to NASA Technology readinessLevel (TRL) 6 by the end of 2003 and the pyro-weldtechnology to TRL 5 by the end of 2003.2 In addition tobreaking the chain of contact, other technologies such asmicrometeorite protection and containerization integrityare being developed.
Figure 7. Schematic Mars Ascent Vehicle
Page 5

2.2.5 Returned Sample Handling
After the samples are returned to Earth, they must besecured to prevent inadvertent release of possible Marsorganisms, and the samples must be protected fromcontamination by Earth organisms. Returned samplehandling technology includes cleaning and sterilizationprocesses, cold sample storage and processing, and life-detection technology.
2.3 Mission Infusion Schedule
The schedule for development of Mars focusedtechnology is primarily driven by the project schedulesfor the Mars 2007 Smart Lander and the Mars 2011Sample Return (MSR) missions as shown in Figure 8.The two key dates for technology infusion into theprojects are the Preliminary Mission Systems Review(PMSR) and the Preliminary Design Review (PDR).
The maturity of a technology is assessed using theNASA Technology Readiness Level (TRL) scale.Technologies at NASA TRL 5-6 at PMSR willinfluence the mission concept, and technologies at TRL≥6 at the time of PDR are candidates for infusion intothe baseline project design. In addition, an earlypreliminary MSR concept selection will be made at thetime when the Smart Lander has its PMSR, in order topromote commonality between the two missions.
Several key decisions on the MSR architecture willgreatly influence the technology that will be developedin FY’02 and later. These include a decision on theEarth Return mode where the options are Direct Return,Deep Space Rendezvous and Mars Orbit Rendezvous
and the Earth Entry mode where the options are DirectEntry and Earth Orbit Rendezvous. Key trades that willinfluence these decisions will be conducted as part ofthe Mars Program Systems Engineering Team (MPSET)activities planned in FY’01. The decisions will impactall elements of the MSR Focused Technology Programat some level. At the same time, the state of technologyadvances and projections of advances in thesetechnologies over the next several years, will influencethe decisions to be made by mission planners bydefining what appears to be feasible within appropriatetime spans. Thus there is an ongoing symbiotic relationbetween Mars Sample Return mission planning andadvances in sample return technology.
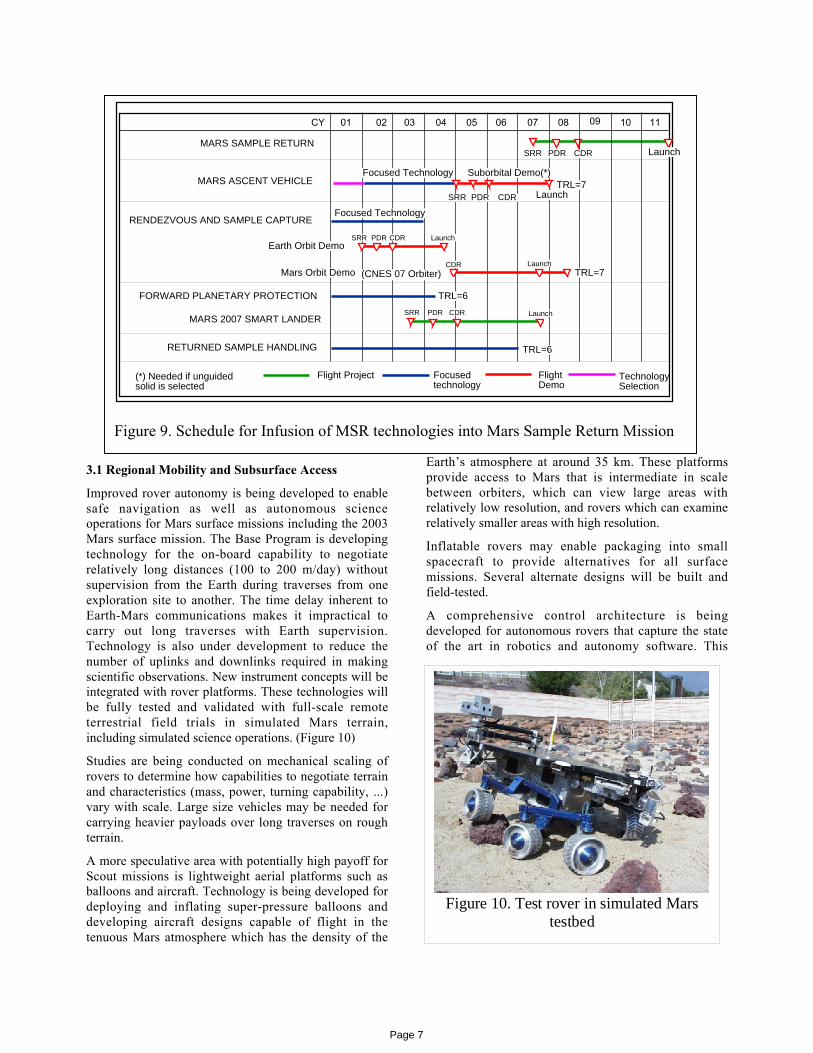
The schedules for validation and infusion of variousMSR technologies are shown in Figure 9.
3. Base Technology Program
The Base Technology Program will address enhancingtechnologies for missions in 2007 and 2011, criticalcapabilities for Scout/competitive and Orbiter missions,and capabilities for all missions beyond 2011. The BaseProgram stresses breakthrough technologies and is lesstightly coupled to mission milestones than the FocusedProgram. It will address technology needs that are lessmature and higher risk (and higher payoff) than thoseconstituting the Focused Program. The Base Programincludes collaborative programs with Deep SpaceSystems, competitive elements, and leveragedtechnology programs with other funding sources. TheBase Program includes enhancing technologies that arenot in critical path of missions.
Mars 2007Smart Lander
Mars 2011Sample Return
MSR Technology
CY 01 02 03 04 05 06 07 08 09 10 11
PMSR
PMSR PDR
PDR Launch
Launch
TRL 5-6 TRL >6
Mars System Studies
Lander Technology
TRL 4-5 TRL 6
MSR Concept Selection
Figure 8. Schedules for infusion of Mars focused technology into the Mars 2007 Smart Landerand the Mars 2011 Sample Return (MSR) missions
Page 6
3.1 Regional Mobility and Subsurface Access
Improved rover autonomy is being developed to enablesafe navigation as well as autonomous scienceoperations for Mars surface missions including the 2003Mars surface mission. The Base Program is developingtechnology for the on-board capability to negotiaterelatively long distances (100 to 200 m/day) withoutsupervision from the Earth during traverses from oneexploration site to another. The time delay inherent toEarth-Mars communications makes it impractical tocarry out long traverses with Earth supervision.Technology is also under development to reduce thenumber of uplinks and downlinks required in makingscientific observations. New instrument concepts will beintegrated with rover platforms. These technologies willbe fully tested and validated with full-scale remoteterrestrial field trials in simulated Mars terrain,including simulated science operations. (Figure 10)
Studies are being conducted on mechanical scaling ofrovers to determine how capabilities to negotiate terrainand characteristics (mass, power, turning capability, ...)vary with scale. Large size vehicles may be needed forcarrying heavier payloads over long traverses on roughterrain.
A more speculative area with potentially high payoff forScout missions is lightweight aerial platforms such asballoons and aircraft. Technology is being developed fordeploying and inflating super-pressure balloons anddeveloping aircraft designs capable of flight in thetenuous Mars atmosphere which has the density of the
Earth’s atmosphere at around 35 km. These platformsprovide access to Mars that is intermediate in scalebetween orbiters, which can view large areas withrelatively low resolution, and rovers which can examinerelatively smaller areas with high resolution.
Inflatable rovers may enable packaging into smallspacecraft to provide alternatives for all surfacemissions. Several alternate designs will be built andfield-tested.
A comprehensive control architecture is beingdeveloped for autonomous rovers that capture the stateof the art in robotics and autonomy software. This
CY 01 02 03 04 05 06 07 08 09 10 11
MARS SAMPLE RETURN
MARS ASCENT VEHICLE
RENDEZVOUS AND SAMPLE CAPTURE
FORWARD PLANETARY PROTECTION
SRR PDR CDR Launch
RETURNED SAMPLE HANDLING
SRR PDR CDR Launch
SRR PDR CDR Launch
LaunchCDR
Suborbital Demo(*)Focused Technology
Focused Technology
Earth Orbit Demo
Mars Orbit Demo (CNES 07 Orbiter) TRL=7
TRL=7
TRL=6
MARS 2007 SMART LANDERSRR PDR CDR Launch
TRL=6
(*) Needed if unguided solid is selected
Flight Project Focusedtechnology
FlightDemo
TechnologySelection
Figure 9. Schedule for Infusion of MSR technologies into Mars Sample Return Mission
Figure 10. Test rover in simulated Marstestbed
Page 7
system is distinguished by its layered structure usingobject-oriented hierarchies.
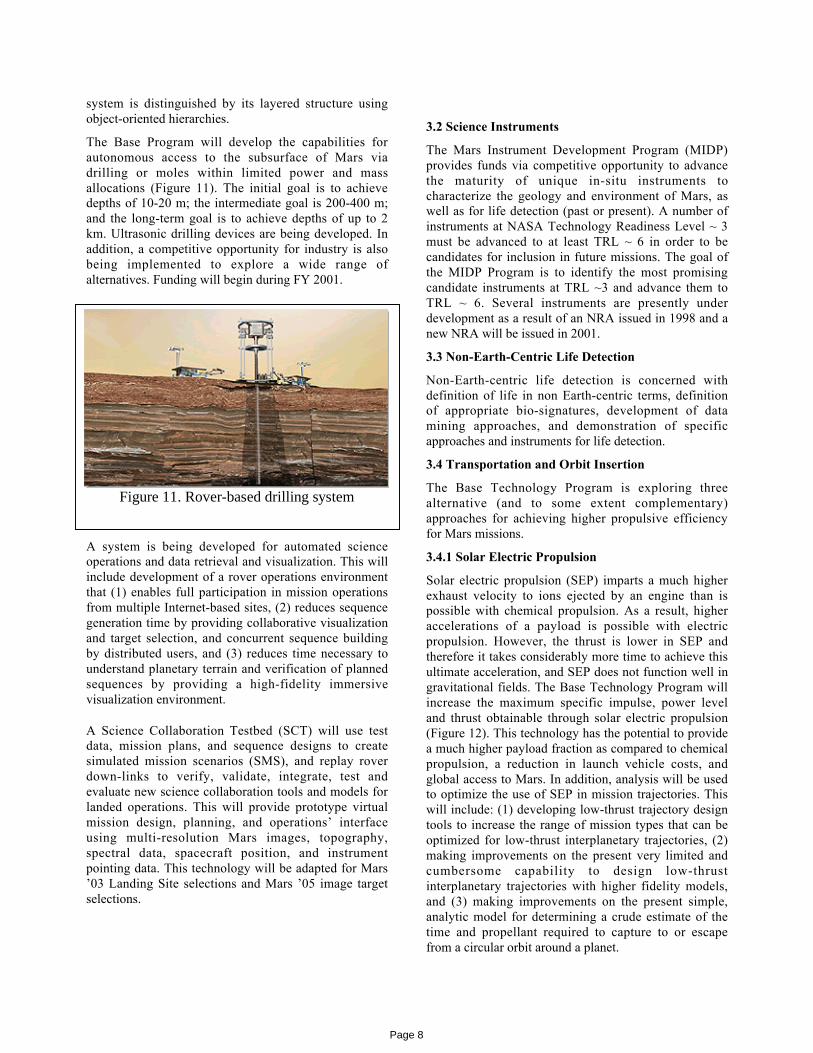
The Base Program will develop the capabilities forautonomous access to the subsurface of Mars viadrilling or moles within limited power and massallocations (Figure 11). The initial goal is to achievedepths of 10-20 m; the intermediate goal is 200-400 m;and the long-term goal is to achieve depths of up to 2km. Ultrasonic drilling devices are being developed. Inaddition, a competitive opportunity for industry is alsobeing implemented to explore a wide range ofalternatives. Funding will begin during FY 2001.
A system is being developed for automated scienceoperations and data retrieval and visualization. This willinclude development of a rover operations environmentthat (1) enables full participation in mission operationsfrom multiple Internet-based sites, (2) reduces sequencegeneration time by providing collaborative visualizationand target selection, and concurrent sequence buildingby distributed users, and (3) reduces time necessary tounderstand planetary terrain and verification of plannedsequences by providing a high-fidelity immersivevisualization environment.
A Science Collaboration Testbed (SCT) will use testdata, mission plans, and sequence designs to createsimulated mission scenarios (SMS), and replay roverdown-links to verify, validate, integrate, test andevaluate new science collaboration tools and models forlanded operations. This will provide prototype virtualmission design, planning, and operations’ interfaceusing multi-resolution Mars images, topography,spectral data, spacecraft position, and instrumentpointing data. This technology will be adapted for Mars’03 Landing Site selections and Mars ’05 image targetselections.
3.2 Science Instruments
The Mars Instrument Development Program (MIDP)provides funds via competitive opportunity to advancethe maturity of unique in-situ instruments tocharacterize the geology and environment of Mars, aswell as for life detection (past or present). A number ofinstruments at NASA Technology Readiness Level ~ 3must be advanced to at least TRL ~ 6 in order to becandidates for inclusion in future missions. The goal ofthe MIDP Program is to identify the most promisingcandidate instruments at TRL ~3 and advance them toTRL ~ 6. Several instruments are presently underdevelopment as a result of an NRA issued in 1998 and anew NRA will be issued in 2001.
3.3 Non-Earth-Centric Life Detection
Non-Earth-centric life detection is concerned withdefinition of life in non Earth-centric terms, definitionof appropriate bio-signatures, development of datamining approaches, and demonstration of specificapproaches and instruments for life detection.
3.4 Transportation and Orbit Insertion
The Base Technology Program is exploring threealternative (and to some extent complementary)approaches for achieving higher propulsive efficiencyfor Mars missions.
3.4.1 Solar Electric Propulsion
Solar electric propulsion (SEP) imparts a much higherexhaust velocity to ions ejected by an engine than ispossible with chemical propulsion. As a result, higheraccelerations of a payload is possible with electricpropulsion. However, the thrust is lower in SEP andtherefore it takes considerably more time to achieve thisultimate acceleration, and SEP does not function well ingravitational fields. The Base Technology Program willincrease the maximum specific impulse, power leveland thrust obtainable through solar electric propulsion(Figure 12). This technology has the potential to providea much higher payload fraction as compared to chemicalpropulsion, a reduction in launch vehicle costs, andglobal access to Mars. In addition, analysis will be usedto optimize the use of SEP in mission trajectories. Thiswill include: (1) developing low-thrust trajectory designtools to increase the range of mission types that can beoptimized for low-thrust interplanetary trajectories, (2)making improvements on the present very limited andcumbersome capability to design low-thrustinterplanetary trajectories with higher fidelity models,and (3) making improvements on the present simple,analytic model for determining a crude estimate of thetime and propellant required to capture to or escapefrom a circular orbit around a planet.
Figure 11. Rover-based drilling system
Page 8

3.4.2 Advanced Chemical Propulsion
Chemical propulsion systems will be developed withlower system mass and higher specific impulse. Someof the technology will be transferable to electricpropulsion feed systems. Several specific goals include:
• 50% mass reduction in titanium propellant tank.
• Hydrazine mN thruster - 70% mass reduction, 40-fold reduction in volume, factor of 100 reduction inthrust.
• 90% mass reduction in transducers.
• 5 lbf biprop thrusters with 15 sec Isp gain allowing60% mass reduction compared to the state of theart.
3.4.3 Aerocapture
Aerocapture has the potential to eliminate the need forlarge quantities of propellant to decelerate a spacecraftwhen entering a planetary orbit. The challenge is to findsuitable lightweight protective shells to protect thespacecraft from the intense heat generated during theaerocapture process. The Base Technology Programwill quantify the benefits and disadvantages ofaeroshells and ballutes in terms of mass, aero-thermodynamic loads, and trajectory robustness, andwill then advance the better approach (ballutes oraeroshells) to TRL = 6 as preparation for a flightexperiment/demonstration.
3.5 Telecommunication and Navigation
Telecommunications advances are needed forcommunication between Earth and Mars and amongorbital assests and landers, rovers, and aerial platformsat Mars.
3.5.1 Deep Space Communications
The goal is to increase the data return capability on the“trunk line” deep space link between Mars and Earth in
order to enable high-speed transmission of orbitalremote sensing data as well as data relayed from surfaceassets. The approach is to achieve significant increase inEquivalent Isotropic Radiated Power (EIRP) through:
• Higher-power transmitters
• Increased aperture (fixed and deployable)
• Near-term transition to Ka-band
• A flight demo in support of longer-term transitionto optical communication
3.5.2 Proximity Link Communications
Proximity link relay communications capabilities areunder development to enable increased data return andincreased connectivity with future Mars spacecraft,landers, rovers, gliders, etc. The approach involvescommunicating data from assets in the Marsenvironment at UHF (~800 MHz) to an orbiter equippedwith a powerful trunk line capability.
These systems will be radiation tolerant/hardened andreconfigurable.
3.6 Advanced Entry, Descent and Landing
Advanced entry, descent and landing (EDL) is thelogical extension of the EDL development in theFocused Technology Program, and it aims to develop anadvanced entry, descent and landing system thatprovides "pinpoint" delivery (10-100 m accuracy), muchmore capable hazard avoidance, and a higher payloaddelivery (>500 kg). (This technology also looks beyond2011 and may also support Scout activities). Activitiesinclude:
• Develop and verify an architecture for employingmultiple sensors for hazard avoidance in landing onMars.
• Develop the ability to deploy and inflate balloonand ballute designs through advanced modeling andanalysis of inflatable structures and dynamics.
• Develop a breadboard for a next-generation MarsLIDAR aimed at increasing the sensor range to theMars surface
• Use supercomputing based simulation to provideterrain generation, site modeling and visualizationsupport for Mars EDL activities.
• Determine the feasibility of orbiting beaconnavigation for precision landing and developguidance algorithms incorporating orbiting beaconnavigation data.
• Develop and test an advanced guidance concept forhypersonic entry and atmospheric flight to increaserobustness of precision landing schemes to errorsand unceratinties.
Figure 12. Electric propulsion thruster
Page 9

• Develop a fast, robust passive imaging-basedhazard detection/avoidance scheme for safe landingon Mars.
4. Conclusions
The Mars Technology Program is divided into aFocused Program and a Base Program. The FocusedProgram is tightly tied to Mars Program missionmilestones. It involves time-critical deliverables thatmust be developed in time for infusion into the Mars2007 and Mars 2011 missions. This program transcendsthe usual gulf between technology and projects byvertically integrating the technology work with pre-project development in a project-like environment withcritical dates for technology infusion. It will primarilyaddress developing technology to enable safe landinganywhere on Mars, long life surface power, andenabling sample return technologies.
In addition, a Mars Base Technology Program attackshigher risk/higher payoff technologies not in the criticalpath of missions. The Base Program will also supporttechnologies that may be enabling for Scout missions.
Further information can be found at the web site:
http://stargate.jpl.nasa.gov/devel/redplanet/technology/.
*Acknowledgement:
The research described in this paper was carried out bythe Jet Propulsion Laboratory, California Institute ofTechnology, under a contract with the NationalAeronautics and Space Administration. Referenceherein to any specific commercial products, process, orservice by trade name, trademark, manufacturer orotherwise, does not constitute or imply its endorsementby the United States Government or the Jet PropulsionLaboratory, California Institute of Technology.1 "Second Generation Landed Missions," J. Graf, et al.,IEEE Conference in Big Sky, Montana, , Paper No. 0-7803-6599-2/01, March 12, 2001.2 The NASA TRL scale is used as a measure of therelative maturity of a technology. A technology mustreach NASA TRL 6 by spacecraft preliminary designreview (PDR) in order to be adopted by a space project.
TRL Accomplishment
1-2 Concept and application are formulated. Basicphenomena are observed in a laboratoryenvironment.
3 Critical functions are tested in a laboratoryenvironment of breadboard configuration tovalidate proof-of-concept’s potentialperformance and lifetime.
4 A breadboard system (or at least the majorcomponents of the system) are tested in thelaboratory and verify that components willwork together effectively in a system. At thislevel, preliminary analytical andexperimentally efforts are made to calculatelifetime performance of critical components.
5 A realistic breadboard portion of the system isthoroughly tested in a relevant environmentthat demonstrates the flight system design.Lifetime performance predictions of criticalcomponents are validated with acceleratedtests.
6 System engineering model with approximate“form fit and function” of a flight systems orprototype demonstration tested in a relevantenvironment on ground or in space. Systemlifetime performance prediction validatedbased on accelerated life testing of componentsand subsystems.
Page 10