the isolde robots upgrade jl grenard en-he isolde workshop and users meeting 15-12-2014
TRANSCRIPT

The ISOLDE robots upgradeJL GRENARD EN-HEISOLDE Workshop and Users meeting 15-12-2014
2
Content• Overwiew of the target area
• Motivations for the change
• The differents solutions evaluated
• The installation and commissionning
• Futur evolution of the system
3
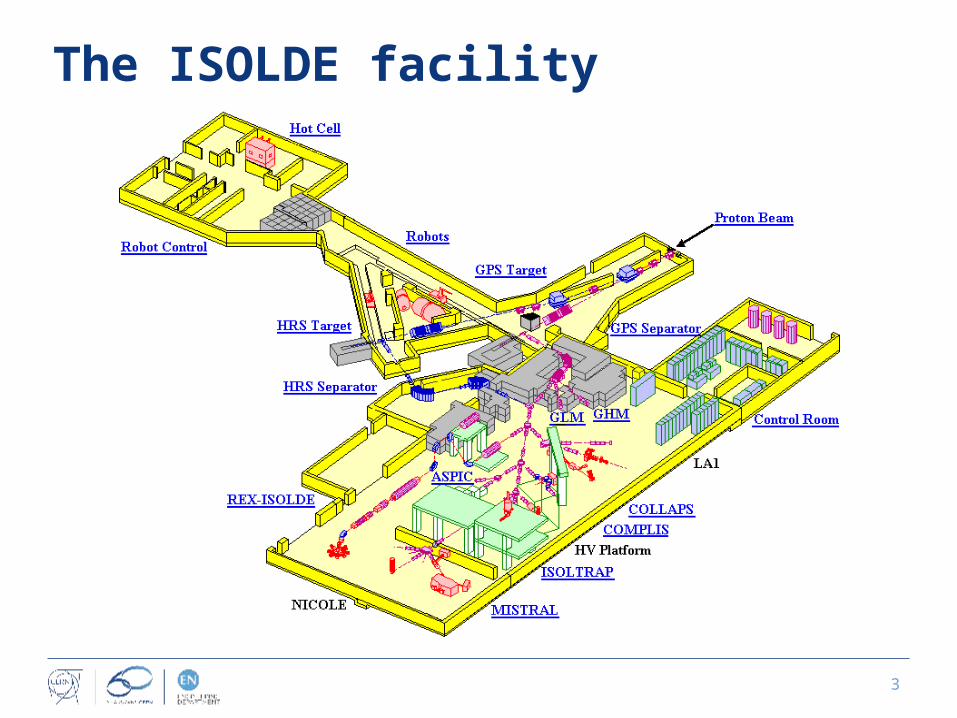
The ISOLDE facility
4
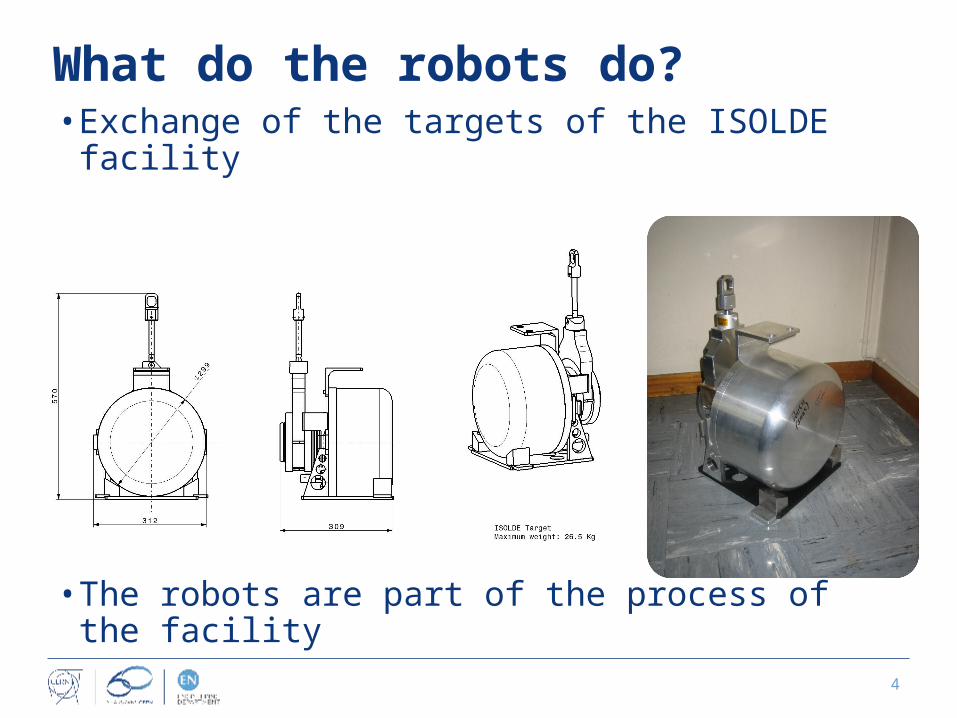
What do the robots do?• Exchange of the targets of the ISOLDE facility
• The robots are part of the process of the facility

5
Interfaces of the facility
Front End Storage shielded sleves

6
Motivation for change• Obsolete controls leading to unacceptable
failure rate• No remote recovery options
7
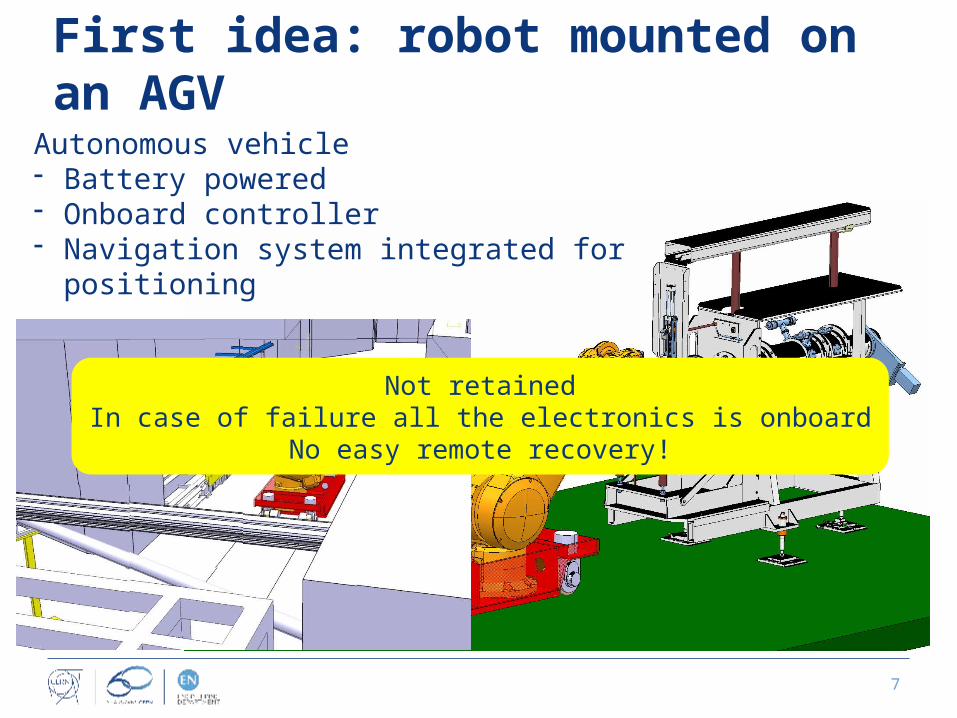
First idea: robot mounted on an AGV
Not retainedIn case of failure all the electronics is
onboardNo easy remote recovery!
Autonomous vehicle- Battery powered- Onboard controller- Navigation system integrated for positioning
8
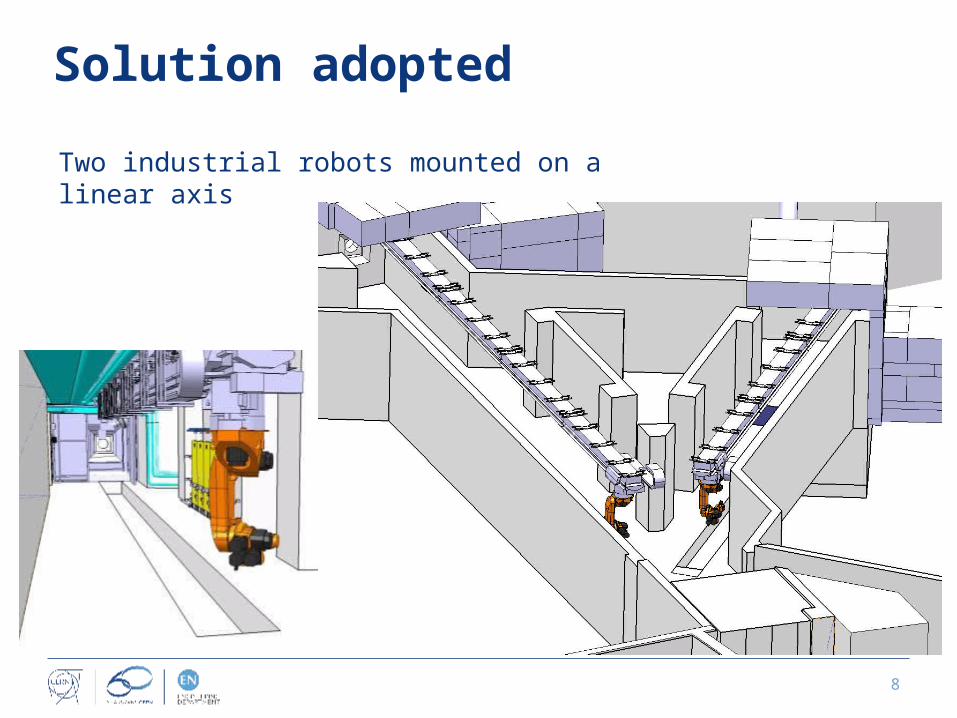
Solution adopted
Two industrial robots mounted on a linear axis

9
How to decide between those options

10
Some reasons for the selected solution
• Safe robot technology integrate safety volume -> no need to add extra sensors for protecting the infrastructure
• No electronics in the hazardous area
• Possible to customise
• Displacement of an electronic board outside of the radioactive area
• Replacement of all the cables with radiation tolerant ones
11
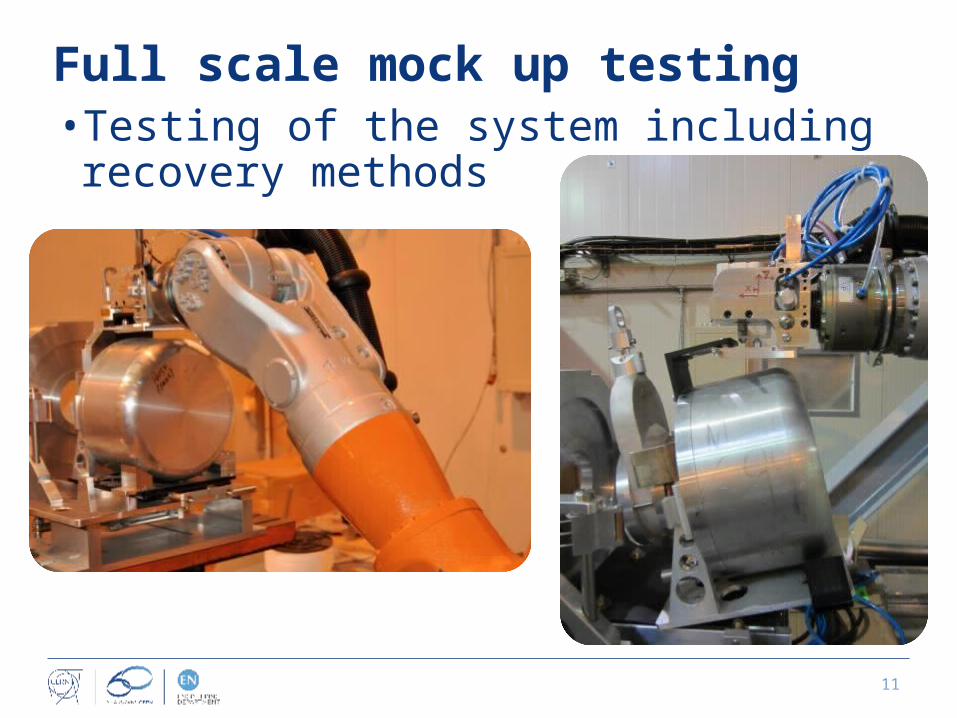
Full scale mock up testing• Testing of the system including recovery
methods
12
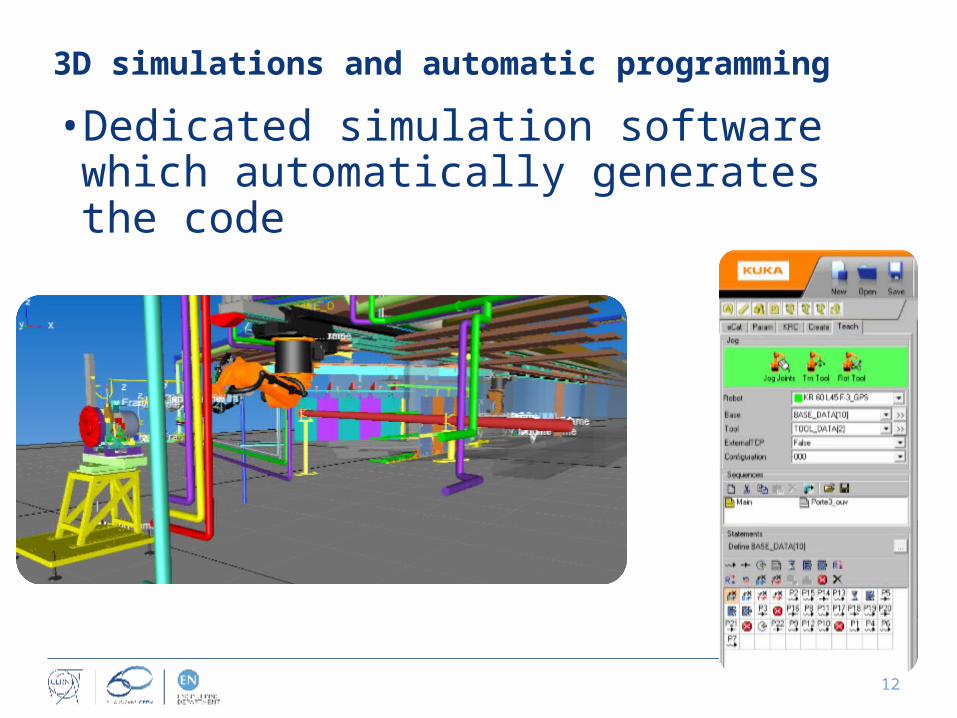
3D simulations and automatic programming
• Dedicated simulation software which automatically generates the code

13
Old robots dismantling

14
The installation• Needs of drilling around 200 holes in the concrete
• Around 10t of new equipement installed
• 1.2 km of cables installed
15
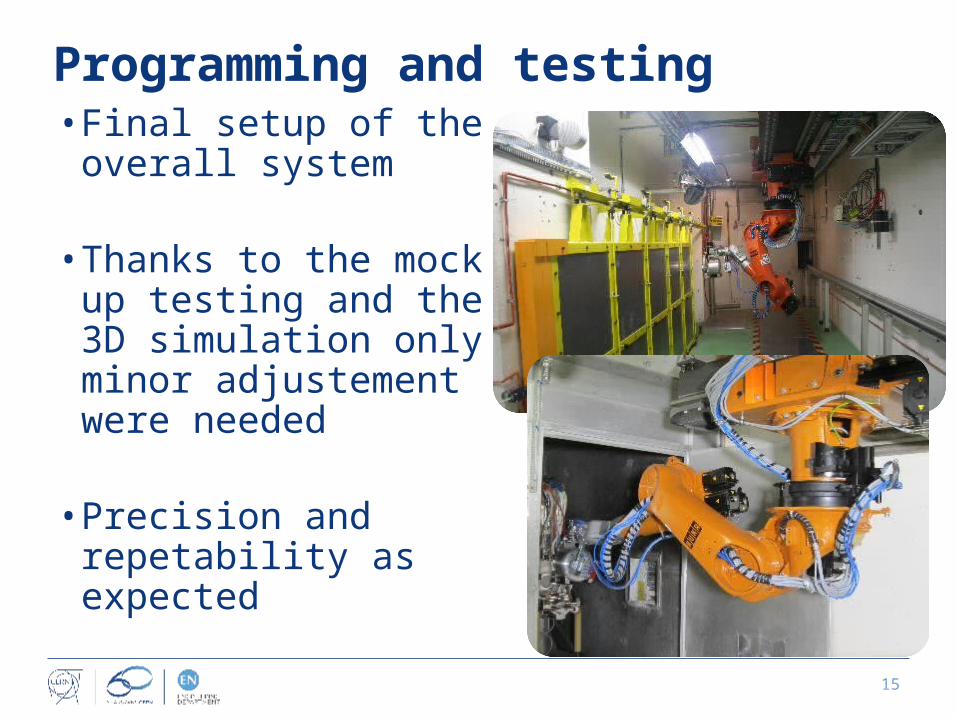
Programming and testing• Final setup of the
overall system
• Thanks to the mock up testing and the 3D simulation only minor adjustement were needed
• Precision and repetability as expected
16
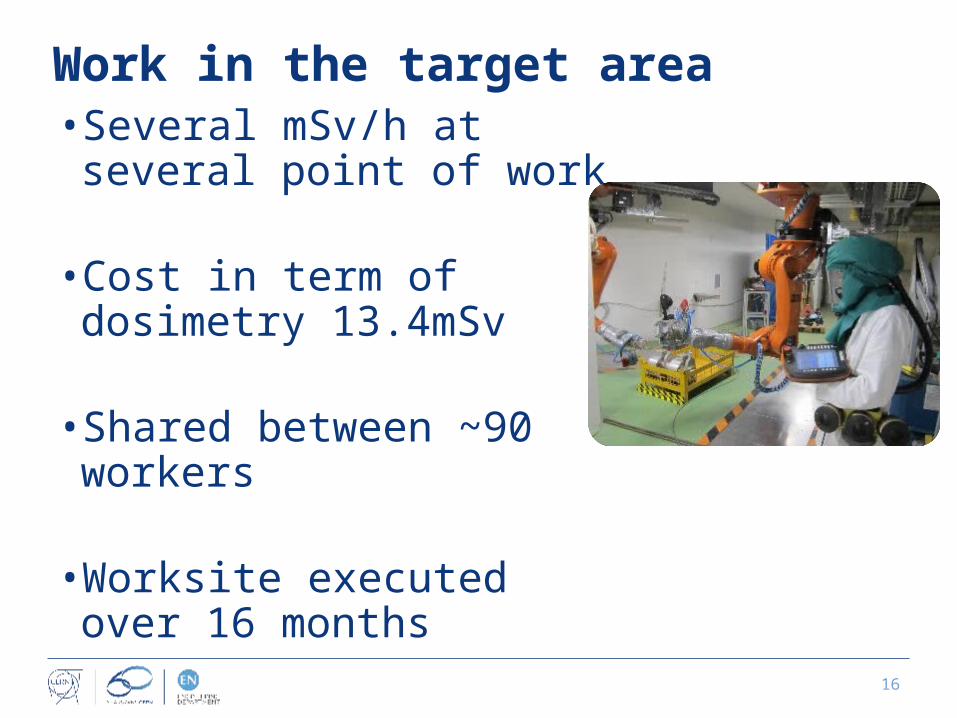
Work in the target area• Several mSv/h at several
point of work
• Cost in term of dosimetry 13.4mSv
• Shared between ~90 workers
• Worksite executed over 16 months

17
The new configuration
New robots characteristics- Lifting capacity : ~30kg at full speed
- Reach of the arm: 2.23m
- Precision: 0.5mm
- Max linear speed: ~2m/s used for the target exchange at only 10% of the speed capability
CERN system integration- mechanical, software, trajectories
- Interfaced with the access system, storage shelves, front end

18
Aditionnal refurbishment• Shielded storage
sleves
• Front End coupling tables

19
Evolution of the system• In 2015 installation of a 3rd robot for
MEDICIS

20
Final system in the coming years
3D animation

21
Thanks to all the teams involved in this work
• EN/HE: M. Czech,• DGS/RP: A. Dorsival, C. Saury, M. Deschamps, J. Vollaire• EN/STI: R. Catherall, T. Stora, AP. Bernardes,
S. Marzari, J. Lendaro, M. Di Castro, C. Mitifiot, M. Vagnoni, M. Owen, C. Lemesre, D. Phan, B. Crepieux
• EN/CV: A. Polato, M. Battistin, A. Sabri, N. Roget• EN/MME: S. Atieh, JP. Brachet, P. Mesenge, A. Porret• EN/EL: P. Lelong, R. Necca• EN/MEF: A. Pardon, M. Arnaud, M. Bonnet• BE/OP: P. Fernier• GS/ASE: E. Sanchez Coral, F. Valentini, D. Chapuis, B. Morand, L. Hammouti• ….
22
Questions ?
