teoria di mori - fulviodisciullo.files.wordpress.com · universita degli` studi di torino facolta...
TRANSCRIPT
UNIVERSITA DEGLI STUDI DI TORINO
FACOLTA DI SCIENZE M.F.N.
CORSO DI STUDI IN MATEMATICA
ANNO ACCADEMICO 2007/2008
Teoria di Morie Mimimal Model Program:
strategie, idee e strumenti
Tesi di Laurea Specialistica24 Luglio 2008
Candidato RelatoreFULVIO DI SCIULLO PROF. ALBERTO COLLINO


La conoscenza alla qualeaspira la Geometria
e la conoscenza dell’Eterno.
PlatoneRepubblica, VII, 52

a Peter Pan e ai pensieri felici

Una varieta algebricae l’insieme degli zeri
di una famiglia di polinomi.
La Geometria Algebricae la branca della Matematica
che si occupa dello studiodelle varieta algebriche.

Introduzione
Ogni materia rigorosa, in un modo o nell’altro, aspira a classificare gli oggettidel suo studio. La Matematica, piu di ogni altra disciplina, ha la possibilita diaspirare ad una classificazione limpida degli oggetti che studia; in Matematica,contrariamente a quanto succede altrove, c’e una grande liberta decisionale allabase del processo di classificazione: la liberta di definire una volta per tutte esenza possibilita di cattiva interpretazione gli oggetti e le relazioni che possonointercorrere tra di loro.
Problema. Classificare le varieta algebriche proiettive.
L’obiettivo di questo lavoro di Tesi e descrivere il tentativo di un proces-so di classificazione. I nostri oggetti saranno le varieta algebriche, soluzioni dizeri di polinomi, e l’idea di fondo sara cercare di individuare un rappresentanteparticolare in ogni classe determinata da una certa relazione di equivalenza.
La prima idea e suddividere il problema in base alla dimensione delle varie-ta; per le varieta di dimensione 1, le curve, la questione e stata completamenterisolta da Riemann nella seconda meta del 1800. La Scuola Italiana di GeometriaAlgebrica i cui primi passi furono compiuti da matematici come Castelnuovo edEnriques riuscı poi a dare risposte complete per il caso delle superficie; questeidee vennero poi perfezionate ed estese da Kodaira e da altri negli anni ’60 ehanno portato a quella che va sotto il nome di classificazione delle superficie diEnriques-Kodaira. Il passaggio successivo era ovviamente cercare di capire lastruttura delle threefold (varieta di dimensione 3), ma fino all’apparizione deiprimi lavori di Shigefumi Mori la situazione era in una fase di stallo.
Per descrivere lo stato dell’arte agli inizi degli anni ’80, riportiamo le parolecon cui Janos Kollar conclude il suo articolo sulle threefolds del 1987.

Introduzione vii
Before the appearance of the works of Mori, it was generally assumed thatalgebraic threefolds are in a state of considerable disorder and there is nohope of developing a theory analogous to that of algebraic surfaces.Max Noether said once that algebraic curves were created by God, algebraicsurfaces by the Devil.This left little room for algebraic threefolds. I hope that I have succeededin convincing the reader that there is a very deep and meaningful theory ofalgebraic threefolds which parallels the theory of algebraic surfaces. It is thehope of everyone working in this field that the results proved so far are onlythe beginning of a detailed structure theory.
Le idee e i risultati di Mori comparsi negli articoli [Mor82] e [Mor88] hannoportato nuova linfa e hanno dato nuovi stimoli per affrontare il problema dellaclassificazione; ai lavori di Mori, negli anni, si sono aggiunti molti altri risultatiche hanno iniziato quella che oggi va sotto il nome di Teoria (o Programma) diMori e ha permesso al suo fondatore di conquisare la Medaglia Fields nel 1990.
L’idea di base e molto semplice: presa in considerazione una varieta X, cer-chiamo di individuare una successione di operazioni geometricamente significa-tive da effettuare su X affinche, se possibile, ad X sia associata una certa varietaXmin birazionale ad X e che sia, in un qualche senso, minimale. L’insieme diqueste operazioni andra sotto il nome di Minimal Model Program.
Molto e stato fatto, nuovi risultati continuano a comparire, ma la Teoria diMori offre al momento numerosi spunti di ricerca.
In questo lavoro di Tesi cerchiamo di mettere in evidenza non solo i risultatiraggiunti dalla Teoria, ma anche il procedimento e le tappe intermedie che hannoportato alla situazione presente.
Nel Capitolo 1 introduciamo i concetti di base riguardanti mappe e morfismiche permettono di mettere in relazione varieta algebriche e arriviamo ad intro-durre uno dei protagonisti di tutta quanta la Teoria: il cono delle curve effettiveNE(X).
Nel Capitolo 2 sviluppiamo il linguaggio e la teoria di cui avremo bisogno perarrivare a presentare i risultati piu moderni. In particolar modo ci occupiamodi definire fibrati e divisori e di investigare le relazioni presenti tra questi duetipologie di oggetti. Introduciamo inoltre le definizioni basilari di intersezione(prodotto) tra curva e divisore, di divisore ampio, divisore nef e presentiamouno degli attori principali del Programma di Mori: il divisore canonico. Presen-tiamo inoltre un’utile strumento come la Formula di aggiunzione e alcune sueapplicazioni al calcolo di divisori canonici.
Nel Capitolo 3 ci occupiamo di fare il punto della situazione su quella chesara la nostra strategia per il tentativo di risoluzione del problema di classifi-

Introduzione viii
cazione delle varieta algebriche. Dopo aver presentato i fondamentali risultati diHironaka (Eliminazione delle indeterminazioni e risoluzione delle singolarita),riportiamo i risultati noti per il caso delle curve e delle superficie; in particolaresottolineiamo l’importanza delle curve negative (in un senso che verra chiarito)e del Teorema di Castelnuovo che permettono di dare la definizione di superfi-cie classicamente minimale e di tracciare una strategia di classificazione per lesuperficie che chiameremo Classical Minimal Model Program.
Nel Capitolo 4 presentiamo il corpo centrale dei risultati ottenuti da Mori eda altri nel corso degli anni ’80 che hanno permesso di affrontare il problemaper le varieta di dimensione 3. L’impostrazione seguita e essenzialmente quelladi [Kol87]. Ci occupiamo quindi dei lemmi di Bend & Break e di come questetecniche e i metodi di caratteristica positiva sono stati utilizzati per dimostrareuna prima versione del Teorema del Cono. Nel tentativo di tracciare una pro-cedura effettiva si avra a che fare con contrazioni di raggi estremali e vedremocome alcune tipologie di contrazioni porteranno alla necessita di introdurre epermettere certe singolarita (canoniche e terminali). A questo punto avremo tut-ti gli strumenti per dare la definizione di varieta minimale e specificare le dif-ferenti tipologie di contrazione che si possono presentare (contrazione di Mori,contrazione divisoriale e contrazione piccola). Concluderemo il capitolo con lapresentazione dell’algoritmo del Minimal Model Program.
Nel Capitolo 5 ci dedichiamo ad investigare i problemi che nascono dalla pre-senza delle contrazioni piccole introducendo la costruzione del flip e del flop diuna varieta. Particolare spazio sara dato alla costruzione esplicita di un esempiodi flip, noto in letteratura come il Flip di Francia.
Nel Capitolo 6 ritorniamo a sviluppare il nostro linguaggio introducendo al-cuni concetti base di quel che viene usualmente chiamato log-framework. Non siconsiderano piu solamente varieta, ma si ha a che fare con coppie da una varietae un suo divisore. Dopo aver ridefinito in questo nuovo ambiente le singolaritae dopo una breve parentesi sui Modelli Canonici, ci occuperemo di tradurre nellog-framework i risultati del Capitolo 4 andando a generalizzare l’algoritmo delMinimal Model Program alle coppie. La parte restante del Capitolo e dedicataalla presentazione di alcuni Teoremi che costituiscono la base teorica dell’algo-ritmo; in particolare daremo la dimostrazione del Teorema del Cono e delle Con-trazioni (Teorema 6.7.3) utilizzando metodi di tipo coomologico seguendo l’im-postazione di Debarre ([Deb01]). La strategia di dimostrazione e riportata nellaSezione 6.5. Oltre che del Teorema del Cono e delle Contrazioni presenteremoanche una dimostrazione del Teorema Base Point Free (Teorema 6.6.11).

Introduzione ix
Nel Capitolo 7 diamo una rapida lista di alcuni recenti e importanti risul-tati riguardanti la finita generazione dell’anello canonico (per una completa trat-tazione di queste quesioni rimandiamo all’Articolo [BCHM06]) e presentiamoalcune modifiche che si possono fare all’algoritmo del Minimal Model Program(MMP with scaling) che permettono di dimostrare la terminazione di una certasequenza di flip. Questi risultati, pubblicati principalmente nel 2006, mostranoquanto la Teoria di Mori sia viva, in costante evoluzione e possa essere fonte dinuovi e stimolanti spunti di ricerca.
Indice
Introduzione vi
Elenco delle figure xii
1 Un primo sguardo 11.1 Mappe e varieta algebriche . . . . . . . . . . . . . . . . . . . . . . . 11.2 Topologia e varieta algebriche . . . . . . . . . . . . . . . . . . . . . . 5
2 Fibrati, fasci e divisori 102.1 Fibrati vettoriali: definizioni e operazioni . . . . . . . . . . . . . . . 102.2 Sezioni di un fibrato vettoriale ed esempi . . . . . . . . . . . . . . . 122.3 Divisori: un primo approccio . . . . . . . . . . . . . . . . . . . . . . 182.4 Fibrati lineari . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 192.5 Divisori e fibrati lineari . . . . . . . . . . . . . . . . . . . . . . . . . . 202.6 Divisori: scendiamo in profondita . . . . . . . . . . . . . . . . . . . 212.7 Cartier contro Weil . . . . . . . . . . . . . . . . . . . . . . . . . . . . 252.8 Divisori particolari . . . . . . . . . . . . . . . . . . . . . . . . . . . . 272.9 Formule di Aggiunzione . . . . . . . . . . . . . . . . . . . . . . . . . 32
3 Lo studio delle varieta 353.1 Strategia e strumenti . . . . . . . . . . . . . . . . . . . . . . . . . . . 353.2 Le curve e le superficie . . . . . . . . . . . . . . . . . . . . . . . . . . 40
4 Teoremi Fondamentali 474.1 Sulla rappresentazione grafica dei divisori . . . . . . . . . . . . . . . 474.2 Bend & Break . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 494.3 Primo Teorema Fondamentale . . . . . . . . . . . . . . . . . . . . . . 524.4 Secondo Teorema Fondamentale . . . . . . . . . . . . . . . . . . . . 554.5 Un mondo singolare . . . . . . . . . . . . . . . . . . . . . . . . . . . 584.6 L’algoritmo del Minimal Model Program . . . . . . . . . . . . . . . 60

Indice xi
5 Flip e Flop 635.1 Un’utile costruzione . . . . . . . . . . . . . . . . . . . . . . . . . . . 635.2 Definizione e problema di esistenza . . . . . . . . . . . . . . . . . . 665.3 Esempio: il Flip di Francia . . . . . . . . . . . . . . . . . . . . . . . . 68
6 Log-framework e Metodi Coomologici 736.1 Le coppie . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 736.2 Singolarita . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 766.3 Modelli Canonici . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 846.4 Minimal Model Program . . . . . . . . . . . . . . . . . . . . . . . . . 856.5 Strategia . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 886.6 Il Teorema Base Point Free . . . . . . . . . . . . . . . . . . . . . . . . 886.7 Il Teorema del Cono e delle Contrazioni . . . . . . . . . . . . . . . . 99
7 Ultime notizie 1067.1 Riduzione del problema . . . . . . . . . . . . . . . . . . . . . . . . . 1077.2 MMP with scaling . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 108
A Il Teorema di Riemann-Roch per le superficie 112A.1 Il pairing di intersezione . . . . . . . . . . . . . . . . . . . . . . . . . 113A.2 Serre e Riemann-Roch . . . . . . . . . . . . . . . . . . . . . . . . . . 116
B MMP e la classificazione delle superficie 118B.1 KX non e nef . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 118B.2 KX e nef . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 119
Bibliografia 123

Elenco delle figure
2.1 Il fibrato O(−1) come varieta . . . . . . . . . . . . . . . . . . . . . . 14
3.1 CP2 meno un punto e il fibrato O(1) . . . . . . . . . . . . . . . . . . 41
4.1 Il cono NE(X) e un divisore qualsiasi . . . . . . . . . . . . . . . . . 484.2 Il cono NE(X) e un divisore ampio . . . . . . . . . . . . . . . . . . . 484.3 Il cono NE(X) e un divisore nef . . . . . . . . . . . . . . . . . . . . . 494.4 Il Teorema del Cono . . . . . . . . . . . . . . . . . . . . . . . . . . . . 524.5 L’algoritmo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62
5.1 La risoluzione di (xy− uv = 0) . . . . . . . . . . . . . . . . . . . . . 655.2 C1 e come un libro... . . . . . . . . . . . . . . . . . . . . . . . . . . . . 70
6.1 Risoluzione di 3 rette incidenti in un punto . . . . . . . . . . . . . . 756.2 Risoluzione della Cuspide y2 = x3 . . . . . . . . . . . . . . . . . . . 756.3 Le soluzioni di mx + ny = N . . . . . . . . . . . . . . . . . . . . . . 956.4 Il Cono delle Curve NE(X) rispetto a KX + B . . . . . . . . . . . . . 1006.5 Il Cono delle Curve NE(X) e il il cono C . . . . . . . . . . . . . . . . 1016.6 Il Cono NE(X) con G− γ(KX + B) = 0 . . . . . . . . . . . . . . . . 102
7.1 Il cono NE(X) e un raggio estremale negativo R . . . . . . . . . . . 1097.2 Il cono NefD(X) e il cono NefD(X+) . . . . . . . . . . . . . . . . . . 1107.3 MMP vs MMP with scaling . . . . . . . . . . . . . . . . . . . . . . . . 110
Capitolo 1
Un primo sguardo
In questo primo capitolo diamo alcuni concetti iniziali e fissiamo le notazioniche manterremo durante tutto il lavoro. Supponiamo il lettore abbia basi diGeometria Algebrica al livello di [Rei88].
Senza definire nuovamente gli oggetti base con cui lavoreremo, dove nondiversamente specificato, consideriamo come campo base l’insieme dei numericomplessi C.
1.1 Mappe e varieta algebriche
Come spesso accade in Matematica, la cosa piu difficile e scegliere la domandaalla quale cercare una risposta. Il nostro problema iniziale e quello di descriverequali sono le buone mappe tra varieta algebriche. Una delle particolarita di quelche accade in Geometria Algebrica e che saranno lecite e interessanti mappe chenon sono delle vere e proprie funzioni in quanto potranno non essere definite sututto il dominio.
Iniziamo con una breve panoramica sulle prime funzioni che viene naturaleconisderare lavorando con oggetti definiti mediante polinomi.
Funzioni regolari Data una varieta V ⊂ Cn, le funzioni regolari non sono altroche funzioni polinomiali date da polinomi in n variabili.
f : V ⊂ Cn → C.
Funzioni razionali. Data una varieta V ⊂ Cn, consideriamo quozienti di poli-nomi. Richiediamo inoltre che le funzioni considerate siano genericamente de-

1.1 Mappe e varieta algebriche 2
finite, cioe chiediamo che i fattori del denominatore, qualsiasi cosa voglia dire,non producano componenti della varieta V.
Definizione 1.1.1. Diciamo che f e regolare in v ∈ V se esistono g, h polinomi tali che
f =gh
con h(v) 6= 0.
Varieta normali Come e naturale che sia, ci sono alcune varieta algebriche chehanno proprieta migliori di altre; le varieta normali formano una classe di varietache si comporta particolarmente bene.
Definizione 1.1.2. Sia V ⊂ Cn una varieta e sia v ∈ V un suo punto. Si dice che Ve normale in v se ogni funzione razionale limitata in un intorno di v e regolare in v. Vsi dice normale se e normale in ogni punto v. Equivalentemente si ha che una varietaalgebrica si dice normale se il suo anello locale e integralmente chiuso nel suo campodelle frazioni.
Vediamo alcune piccole interessanti proprieta.
Fatto 1.1.3. Se V e una varieta normale allora accade che:
- una funzione razionale e regolare in v se e solo se e continua in v;
- se v e un punto liscio allora V e normale in v;
- una curva e normale se e solo se e liscia.
Le varieta normali in generali non sono varieta liscie, tuttavia le loro singo-larita hanno, in un certo senso, dimensione controllata. Si ha infatti il seguenterisultato.
Fatto 1.1.4. Sia V una varieta normale, allora
dim Sing(V) 6 dim V − 2.
Fatto 1.1.5. Sia F e un’ipersuperficie di Cn, allora F e normale se e solo se
dim Sing(V) ≤ dim V − 2.
Le varieta normali presentano un ottimo comportamento riguardo funzionidefinite su sottoinsiemi della varieta stessa, come descritto dal seguente impor-tante Teorema.
Teorema 1.1.6 (Teorema di Hartogs). Sia V una varieta normale e sia W ⊂ V unasottovarieta tale per cui dim W 6 dim V − 2 e sia f una funzione regolare su V −W.La funzione f si estende ad una funzione regolare su V.

1.1 Mappe e varieta algebriche 3
Abbiamo quindi che la normalita permette di estendere in modo univoco fun-zioni definite su aperti sufficientemente grandi della varieta. Pensiamo al caso diuna superficie e di una funzione f definita ovunque tranne che su certi punti (lavarieta W di dimensione minore o uguale a dim V − 2 = 2− 2 = 0): c’e un solomodo per estendere f su W.
Osserviamo che tutte le definizioni date fin’ora possono essere estese al casoproiettivo lavorando su opportuni aperti affini. Nel caso proiettivo si ha, comemostrato dal seguente risultato, che le funzioni regolari sono particolarmenterigide.
Fatto 1.1.7. Sia V una varieta irriducibile proiettiva e f una funzione regolare su V.Allora f e costante.
Vogliamo ora definire mappe tra varieta algebriche proiettive. Daremo ladefinizione in vari modi equivalenti e sfutteremo questa flessibilita per poterciadattare alle differenti situazioni.
Mappe tra varieta proiettive I Accade che una mappa F da V in un certo CPn edata da funzioni razionali f1, . . . , fn su V.
F : V → CPn
v 7→ ( f1(v), . . . , fn(v), 1).
La F sara definita dove sono definite tutte le fi, ma potrebbero esserci anche altripunti in cui e definita; si ha infatti che F e definita in v ∈ V se e solo se esiste gfunzione regolare in v tale che fig e regolare in v e
( f1(v)g, . . . , fn(v)g, g) 6= 0.
Se F e definita in v diremo che F e regolare in v.
Teorema 1.1.8 (Formula della dimensione). Sia f : V → W una mappa regolaredominante, per ogni w ∈ W si ha che f−1(w) = ∅ oppure e veificata la seguenterelazione:
dim V 6 dim W + dim f−1(w)
Si ha inoltre che per un generico punto w la relazione precedente vale con segno diuguaglianza.
Mappe tra varieta proiettive II Possiamo arrivare ad una definizione di mappepartendo dalla semplice osservazione che ad ogni punto p ∈ CPn corrisponde

1.1 Mappe e varieta algebriche 4
una retta per l’origine di Cn+1. Si ha pertanto che una mappa f : V → CPn puoessere pensata come
F : V → rette per l’origine di Cn+1v 7→ Lv.
La mappa F determina ed e determinata quindi da un sottoinsieme L ⊂ V×Cn+1
fatto in modo che per ogni v ∈ V
L ∩(v ×Cn+1
)= Lv.
Una mappa viene vista come una famiglia di rette di Cn+1 che varia, qualsi-asi cosa voglia dire, algebricamente. L’idea e quindi questa: dare una mappaf : V → CPn equivale, utilizzado un oggette che verra definito nel capitolosuccessivo, a dare un fibrato lineare L ⊂ Cn+1 ×V.
Mappe tra varieta proiettive III Data una F : V → W, per dire che cos’e unamappa, cerchiamo di utilizzare il grafico Γ(F). Se F e ovunque definita in V alloraΓ(F) e un chiuso, tuttavia in generale non lo e. Consideriamo Γ ⊂ V ×W unasottovarieta chiusa; come riconosciamo se Γ e effettivamente il grafico di unamappa? Innanzitutto dovremmo avere che la proiezione di un punto di Γ sulprimo fattore e costituita da un solo punto.
La situazione e descritta dal naturale diagramma
Γ
p
q // W
V
>>~~~~~~~~
Se Γ e il grafico di una mappa F e v ∈ V allora
F(v) = q(p−1(v))
ovunque F e definita, cioe p−1(v) deve essere un solo punto per, qualsiasi cosavoglia dire, la maggior parte dei v ∈ V. Diciamo quindi che Γ e il grafico di unamappa razionale tra varieta algebriche se Γ e tale per cui p : Γ → V e biunivocaper la maggior parte dei punti.
Diamo ora alcuni interessanti risultati in caratteristica 0 che ci saranno utili infuturo.
Teorema 1.1.9 (Teorema di Connessione di Zariski). Sia p : W → V una mapparegolare propria tra varieta irriducibili; sia p−1 : V → W e una mappa razionale e Vuna varieta normale. Allora p−1(v) e connessa per ogni v ∈ V.

1.2 Topologia e varieta algebriche 5
Corollario 1.1.10. Accade che p−1 e regolare in v se e solo se p−1(v) e un singolo punto.
Corollario 1.1.11. Siano V e W due varieta proiettive, sia V normale. Sia f : V 99K Wuna mappa. Allora esiste Z ⊂ V tale che
dim Z 6 dim V − 2
per cui f e regolare su V − Z.
Teorema 1.1.12 (Teorema di Rigidita). Siano U, V, W varieta algebriche; sia V proi-ettiva, U connessa ed f una mappa regolare
f : U ×V → W.
Se f (u0 × V) = punto per qualche u0 ∈ U allora f (u × V) = punto per ogniu ∈ U.
Dimostrazione. Sia Z ⊂ U l’insieme dei punti u ∈ U per cui f (u×V) = punto.Pare evidente che Z sia un chiuso; se mostriamo che e anche un aperto abbiamo,poiche U e un chiuso, che Z = U. Facciamo vedere che Z e intorno di ogni suopunto; a tal fine consideriamo u ∈ Z e u′ vicino ad u; Dal momento che V eproiettiva, V e anche compatta e pertanto f (u′ × V) e vicino a f (u × V) =punto ed e quindi contenuto in un intorno piccolo di quel punto. Le coordinatelocali di questo intorno danno quindi funzioni regolari su u′ × V che, per ilFatto 1.1.7, sono costanti e abbiamo quindi f (u′ ×V) = punto.
1.2 Topologia e varieta algebriche
Introduciamo in questa sezione i primi potenti strumenti di topologia che uti-lizzeremo d’ora in avanti.
Una varieta algebrica risulta avere una naturale struttura di spazio topologi-co ed e noto che puo essere triangolato mediante, ad esempio, una suddivisionesimpliciale fatta con simplessi di dimensione opportuna. Se X ⊂ Y e una sot-tovarieta complessa chiusa abbiamo che esiste una triangolazione di Y tale percui X e l’unione di certi simplessi. Se 2k e la dimensione dei simplessi, si puoquindi considerare X2k e associare alla sottovarieta la classe di omologia [X] inH2k(Y, Z). Abbiamo pertanto una maniera naturale di associare a sottovarietaalgebriche elementi di opportuni gruppi di omologia.
Un piccolo appunto prima di continuare. Con il procedere del lavoro saremosempre piu spesso tentati, con abuso di linguaggio, di scrivere X in luogo di [X];cadremo spesso in questa tentazione.
A titolo di esempio, consideriamo f una funzione razionale (o addiritturameromorfa) su Y e denotiamo con Z il luogo degli zeri e con P il luogo dei poli.

1.2 Topologia e varieta algebriche 6
Sia, dentro CP1 un cammino tra 0 = [0 : 1] e ∞ = [1 : 0]; avendo risolto leeventuali indeterminazioni (vedremo che si puo fare) costruendo f : Y → CP1,la controimmagine mediante f sara una catena che avra bordo uguale a Z − P.Lavorando in Y e poi utilizzando la mappa di proiezione π : Y → Y, abbiamoche in omologia [Z]− [P] = 0 e cioe che per una funzione razionale su Y
[Zeri] = [Poli].
Un’immediata conseguenza di questa consideazione e questo semplice quantoutile fatto.
Fatto 1.2.1. Siano Y = CPn e g un polinomio omogeneo di grado k; considerato
f =gxk
0
abbiamo immediatamente che[G] = k[H],
dove G e il luogo degli zeri di g e H un iperpiano.
Stiamo quindi dicendo che in omologia un’ipersuperficie di CPn di grado k euguale a k volte l’iperpiano.
Occupiamoci un momento, senza entrare nei dettagli, di orientamento dellevarieta. La seguente affermazione e cosa nota.
Fatto 1.2.2. Una varieta complessa ammette un orientamento.
Da questo noto risultato, discendono alcune interessanti proprieta.
Corollario 1.2.3 (Positivita di intersezione). Sia Y una varieta complessa e siano Ue V due sottovarieta con intersezione trasversa. Denoniamo con Ai le componenti diU ∩ V. E cosa nota che deve risultare [U] ∩ [V] = ∑ εi[Ai] dove εi = ±1 in baseall’orietamento di U, di V e di Y su Ai. Dal momento che le varieta complesse sonocanonicamente orientate, gli orientamenti sono compatibili e si ha che
[U] ∩ [V] = ∑[Ai].
Corollario 1.2.4. Sia Y una varieta proiettiva e sia X ⊂ una sua sottovarieta chiusa didimensione k. Si ha che [X] ∈ H2k(Y, Q) non e mai zero.
Dimostrazione. Consideriamo la varieta proiettiva Y ⊂ CPn e consideriamo unpunto x ∈ X. Sia L uno spazio lineare di dimensione (n − k) passante per x.Per ragioni legate alla dimensione abbiamo che X ∩ L e formato da un insiemediscreto e finito di punti; si ha pertanto che
[X] ∩ [L] = [x1] + [x2] + · · ·+ [xm] = m[punto] ∈ H0(CPn, Q) ' Q. (1.1)

1.2 Topologia e varieta algebriche 7
Dalla (1.1) otteniamo quindi che in CPn risulta [X]∩ [L] 6= 0; ma siccome [L] 6= 0risulta [X] 6= 0 ed essendo non nullo in CPn deve essere non nullo anche inY.
Osserviamo che se Xi ⊂ Y sono certe sottovarieta tutte di dimensione k, conun ragionamento analogo a quello usato nella dimostrazione del Corollario 1.2.4,abbiamo che se ai > 0
∑ ai[Xi] 6= 0.
L’interesse di combinazioni lineari come queste andra via via crescendo e costi-tuira l’idea di partenza per la costruzione del gruppo dei k-cicli che vedremo neicapitoli successivi.
E interessante sottolineare come l’ipotesi del Corollario 1.2.4 di lavorare convarieta proiettive e cruciale: esistono controesempi per varieta complete, ma nonproiettive (vedi [Kol87]ai punti [12.11] e [12.11]).
A conclusione di questa piccola parte dedicata alla topologia algebrica sullevarieta, facciamo intervenire uno dei protagonisti del Programma di Mori: ilcono delle curve. Abbiamo visto come sia naturale investigare il comportamentodi varieta di dimensione k dentro l’R-spazio vettoriale H2k(X, R) a quindi inparticolare si ha che una curva C su una certa varieta X definisce naturalmenteun elemento [C] ∈ H2(X, R).
Definizione 1.2.5 (Cono delle Curve). Il sottoinsieme di H2(X, R) dato dalle combi-nazioni lineari positive di classi di omologia di curve su X e detto Cono delle Curve diX e la sua chiusura NE(X) e detta Cono chiuso delle Curve di X.
Accade che NE(X) e un cono dello spazio vettoriale reale H2(X, R) e graziea quanto osservato dopo il corollario 1.2.4 si ha che 0 /∈ NE(X) e che il conodelle curve non puo contenere un’intera retta. Uno degli oggetto piu interssantiper la Teoria di Mori risultera essere proprio la chiusura del cono NE(X) e iltentativo di descrizione di questo cono portera all’importante Teorema del Conoche vedremo negli ultimi Capitoli.
Ancora qualche utile richiamo riguardo ai coni convessi.
Definizione 1.2.6. Dato un cono convesso V e un suo sottocono W diciamo che W eestremale se presi due punti u, v ∈ V per cui si ha che u + v ∈ W allora risulta cheu, v ∈ W.
Un sottocono di dimensione 1 viene detto raggio.
Anticipiamo fin da ora che i raggi estremali rivestiranno un ruolo particolar-mente significativo. Intituivamente un sottocono estremale di un cono poliedralenon e altro che una faccia del cono. E interessante osservare che nel caso in cui

1.2 Topologia e varieta algebriche 8
il cono non contiene una retta (come nel caso di NE(X)), il cono risulta esserel’inviluppo convesso dei suoi raggi estremali.
Definizione 1.2.7. Un cono V e detto localmente finitamente generato in v ∈ V se,dato un intorno di v, solo un numero finito di raggi estremali intersecano il dato intorno.
Come verra spiegato meglio nei capitoli successivi sara cruciale considerarele intersezioni dei divisori con gli elementi del Cono delle Curve e in partico-lare contare il numero di punti di queste intersezioni. Queste informazioni nu-meriche ci permetteranno di otterremo facilmente proprieta geometriche e in-sieme alle relazioni di equivalenza numerica che introdurremo, costituisconoquella che potremmo chiamare la Geometria Numerica (da non confondere dallaGeometria Enumerativa e dalla Geomtria Aritmetica) delle varieta.
Il Cono Nucleo NE( f ) Una mappa tra varieta puo essere data utilizzando unparticolare sottocono di NE(X). Consideriamo questa situazione. Se f : X → Ye una mappa tra varieta proiettive e C una curva su X. Dal momento che ladimensione non puo crescere, si ha che f (C) o e una curva o e un punto. Il ConoNucleo NE( f ) e il sottocono di NE(X) generato dalle curve C ⊂ X per cui f (C) eun punto.
Proposizione 1.2.8. Nella situazione descritta si ha che se C e una curva
f (C) = punto ⇐⇒ [C] ∈ NE( f ). (1.2)
ed inoltre NE( f ) e estremale.
Dimostrazione. Proviamo innanzitutto la 1.2. La (⇒) vale per definizione diNE( f ). Consideriamo ora [C] ∈ NE( f ); possiamo scivere [C] = ∑ ai[Ci] dovef (Ci) = punto e quindi in H2(Y, R) si ha ceh [ f (C)] = ∑ ai[ f (Ci)] = 0; grazie alCorollario 1.2.4 f (C) non puo essere una curva e quindi e un punto. Per provareche NE( f ) e estremale, considero u = ∑ ai[Ci], v = ∑ bj[Dj] con u + v ∈ NE( f ).Otteniamo che ∑ ai[ f (Ci)] + ∑ bj[ f (Dj)] = 0 con ai > 0, bi > 0 e quindi, comesopra, che f (Ci) e f (Dj) sono dei punti. La Definizione 1.2.6 e soddisfatta e ilcono NE( f ) risulta estremale.
La Proposizione precedente ci assicura quindi che le curve che, in un sensoche verra meglio specificato tra poco, sono contratte in un punto stanno tuttequante su un sottocono estremale. Un risultato importante del Programma diMori sara garantire la possibilita di contrarre raggi estremali per ottenere un conocon una, qualsiasi cosa voglia dire, forma migliore.

1.2 Topologia e varieta algebriche 9
Mappe tra varieta proiettive IV Supponiamo di avere una mappa tra varietaproiettive f : X → Y a fibre connesse, accade che f e univocamente determinatadal cono nucleo NE( f ). Un altro modo in cui puo essere data una mappa X → Yconsiste nel dare il cono nucleo NE( f ).
Proposizione 1.2.9. Nella situazione precedente, due punti x e y hanno la stessa im-magine mediante f se e solo se possono essere uniti da una catena di curve Ci ∈ NE( f ).
Dimostrazione. Infatti se f (x) = f (y) abbiamo che f−1( f (x)) e connessa, ma sia xsia y stanno in f−1( f (x)) e quindi abbiamo una catena che unisce i due punti. Seinvece supponiamo di avere una catena di curve Ci in NE( f ), si ha f (∪Ci) =∪ f (Ci) che e un’unione di punti. Ma ∪Ci e connesso, l’immagine di un connessoe un connesso e quindi f (∪Ci) = punto. Abbiamo quindi che NE( f ) determina,in qualche senso, gli insiemi di livello di f e, grazie alla proiettivita, determinaunivocamente la mappa f .
L’idea che permette di definire mappe utilizzando il cono nucleo e essenzial-mente questa. Innanzitutto indichiamo con N(X) l’insieme delle combinazionilineari a coefficienti razionali di curve. Una mappa suriettiva f : X → Y induceuna mappa suriettiva N(X) → N(Y) e accade che
N(Y) ' N(X)NE( f )
.
D’altra parte assegnando il Cono nucleo abbiamo la mappa tra N(X) e N(Y).A conclusione di questa sezione diamo un’ultima definizione.
Definizione 1.2.10 (Contrazione di un sottocono). Sia V ⊂ NE(X) un sottoconochiuso, diciamo che V puo essere contratto se esiste una varieta normale Y e una mappasuriettiva f : X → Y per cui f ha fibre connesse e V = NE( f ). In tale situazione, lamappa f e detta contrazione
Uno degli obiettivi del Programma di Mori e investigare e classificare le pos-sibili tipologie di contrazioni.

Capitolo 2
Fibrati, fasci e divisori
In questo capitolo ci occupiamo di introdurre gli strumenti essenziali che uti-lizzeremo per intraprendere lo studio delle varieta algebriche. Ci occuperemoinfatti di investigare le relazioni tra fibrati, fasci e divisori.
Ad un oggetto geometrico come una varieta e possibile associare oggetti al-gebrici che permettono di tradurre in un altro linguaggio alcune proprieta geo-metriche della varieta. Una prima applicazione di questo principio e data dallanota affermazione per cui due varieta sono, qualsiasi cosa voglia dire, birazional-mente equivalenti se e solo se i campi delle funzioni corrispondenti sono isomor-fi. In questo capitolo cerchiamo di estendere la lista degli oggetti che possonoessere associati ad una varieta utilizzabili per descriverne le proprieta.
2.1 Fibrati vettoriali: definizioni e operazioni
Per visualizzare un oggetto come un fibrato vettoriale su una varieta algebrica,possiamo pensare intuitivamente ad una famiglia di spazi vettoriali che variapunto per punto in modo algebrico.
Definizione 2.1.1 (Prima Definizione di Fibrato Vettoriale). Un fibrato vettorialesu una varieta algebrica X e una varieta algebrica V considerata congiuntamente ad unamappa regolare p : V → X tale per cui:
(a) per ogni x ∈ X esiste un aperto U contenente x e un isomorfismo di varietaalgebriche
g : U ×Cn → p−1(U)
per cui per ogni u ∈ U, e,∈ Cn accade che (p g)(u, e) = u;

2.1 Fibrati vettoriali: definizioni e operazioni 11
(b) se gi : Ui ×Cn → p−1(Ui) sono due isomorfismi come al punto (a) con i = 1, 2per cui x ∈ U1 ∩U2 allora le strutture di spazio vettoriale indotta da
gi : x ×Cn → p−1(x)
sono le stesse.
L’intero n e detto rango del fibrato vettoriale.
In un fibrato vettoriale V si ha quindi una mappa che associa ad ogni punto xsulla varieta X la fibra data da un certo spazio vettoriale; le fibre variano in modoalgebrico e V puo, in qualche senso, essere pensato come l’unione di tutte questefibre. La seguente definizione, equivalente alla prima, mette maggiormente inevidenza la struttura di V.
Definizione 2.1.2 (Seconda Definizione di Fibrato Vettoriale). Nella situazione de-scritta dalla (a) della definizione 2.1.1, la condizione (b) e equivalente ad affermare che ilfibrato vettoriale V e dato dall’unione di pezzi Ui ×Cn incollati insieme da funzioni ditransizione
gij = gi g−1j : (Ui ∩Uj)×Cn → (Ui ∩Uj)×Cn
in modo che gi g−1j sia invertibile e lineare sulle fibre.
Stiamo cioe chiedendo che le gij non siano altro che isomorismi di certi spazivettoriali; le funzioni di transizione permettono qundi di incollare tutti quanti ipezzi in modo da assicurare la compatibilita delle strutture algebriche date dalfibrato.
E di particolare interesse osservare che un fibrato vettoriale risulta determi-nato una volta assegnate le sue funzioni di transizione gij.
Supponiamo ora di avere V e W fibrati vettoriali su una stessa varieta alge-brica X; definendo le operazioni sulle fibre possiamo naturalmente costruire ifibrati vettoriali su X
• duale: V−1 o V∗;
• somma diretta: V ⊕W;
• prodotto tensoriale: V ⊗W;
• determinante: det V =∧n V, con n il rango di V.
Notazione additiva In Geometria Algebrica, per motivi che saranno chiari-ti piu tardi con l’introduzione del concetto di divisore, i fibrati lineari hannoun ruolo particolare e per le operazioni tra questi fibrati si adotta sovente la

2.2 Sezioni di un fibrato vettoriale ed esempi 12
notazione additiva. In questo formalismo il prodotto tensoriale V ⊗ W si in-dica con V + W, la potenza tensoriale V⊗m con mV e il duale V−1 con −V.Passeremo progressivamente dalla notazione moltiplicativa a quella additiva ene investigheremo le motivazioni formali.
Definizione 2.1.3 (Omomorfismi di fibrati vettoriali). Dati pi : Vi → X, i = 1, 2fibrati vettoriali su X, un omomorfismo di fibrati vettoriali e una mappa regolaref : V1 → V2 tale per cui per ogni v1 ∈ V1 risulta p1(v1) = p2( f (v1)) e ognif : p−1
1 (x) → p−12 (x) sia lineare. Chiediamo cioe che il diagramma
V1
p17
7777
77f // V2
p2
X.
sia commutativo e che la restrizione della f alle fibre sia lineare.
Una sequenza di omomorfismi di fibrati vettoriali si dice esatta se e esatta suogni fibra. Considerati V1, V2 e V3, dalla successione esatta
0 → V1 → V2 → V3 → 0
prendendo i determinanti, abbiamo che det V2 ∼= det V1 ⊗ det V3.Negli sviluppi successivi sara fondamentale tirare indietro fibrati vettoriali:
ecco quello che vogliamo fare.
Definizione 2.1.4 (Pullback di un fibrato). Sia p : V → X un fibrato vettoriale esia f : Y → X mappa regolare tra varieta algebriche. Dal momento che dare un fibratoequivale ad assegnare certi aperti e certe funzioni di transizione, il pullback di V e unfibrato vettoriale f ∗V → Y cosı definito: se V e dato da aperti Ui × Cn, Ui ⊂ X efunzioni di transizione gij, f ∗V e dato assegnando come aperti f−1(Ui) × Cn e comefunzioni di transizione f−1 gij f .
2.2 Sezioni di un fibrato vettoriale ed esempi
Definizione 2.2.1. Dato un fibrato p : V → X una sezione globale di V e una mapparegolare s : X → V tale per cui p s = identita. L’insieme delle sezioni globali di Vsu X risulta essere uno spazio vettoriale (per le naturali operazioni definite punto perpunto) e viene indicato con Γ(X, V). Se la mappa s risulta definita su un aperto U ⊂ Xallora s e detta sezione locale. Una mappa razionale t : X 99K V per cui p t = id edetta sezione razionale.

2.2 Sezioni di un fibrato vettoriale ed esempi 13
Accade che un fibrato vettoriale algebrico ha sempre sezioni razionali; ab-biamo inoltre l’utile corollario, conseguenza del teorema di Hartogs che fornisceun’ulteriore ragione per preferire varieta normali.
Corollario 2.2.2. Sia X una varieta normale, Y una sua sottovarieta tale per cuidim Y 6 dim X − 2 e V un fibrato vettoriale su X. Ogni sezione s di V|(X − Y)si estende in modo unico ad una sezione s di V.
Dimostrazione. La sezione locale s soddisfa le ipotesi del Teorema di Hartogs(1.1.6) ed ammetter pertanto un’unica estensione.
Supponendo di conoscere le basi della Teoria dei Fasci, diamo ora alcuniesempi notevoli di fibrati vettoriali.
Esempio 2.2.3. Data una varieta X, per ogni intero positivo n si ha che
p : X ×Cn → X
e il fibrato che a ciascun x ∈ X associa la fibra x ×Cn.
Esempio 2.2.4. Con le notazioni come nell’esempio precedente, diciamo in par-ticolare che, posto n = 1, X ×C e il fibrato triviale e indichiamo con OX il fasciodelle sezioni associate al fibrato triviale. Piu in generale abbiamo che ad un fibra-to e possibile associare il fascio delle sezioni del fibrato. Per motivi che sarannochiari tra poco, confonderemo spesso i fibrati con il fascio ad esso associato.
Esempio 2.2.5. In CPn abbiamo che ad ogni punto v resta associata una rettaLv di Cn+1. Questa corrispondenza definisce quindi il fibrato di rango 1 B ⊂CPn × Cn+1 dato da B = (v, Lv), v ∈ CPn; il fascio ad esso associato vienechiamato O(−1).
Osserviamo innanzitutto che O(−1), come varieta algebrica B, non e altroche il blow-up di Cn+1 nell’origine.
Fatto 2.2.6. O(−1) non ha sezioni globali non nulle.
Dimostrazione. Dall’osservazione appena fatta sulla struttura come varieta diO(−1) e immediato considerare la situazione
E // B //
CPn ×Cn+1
CPn
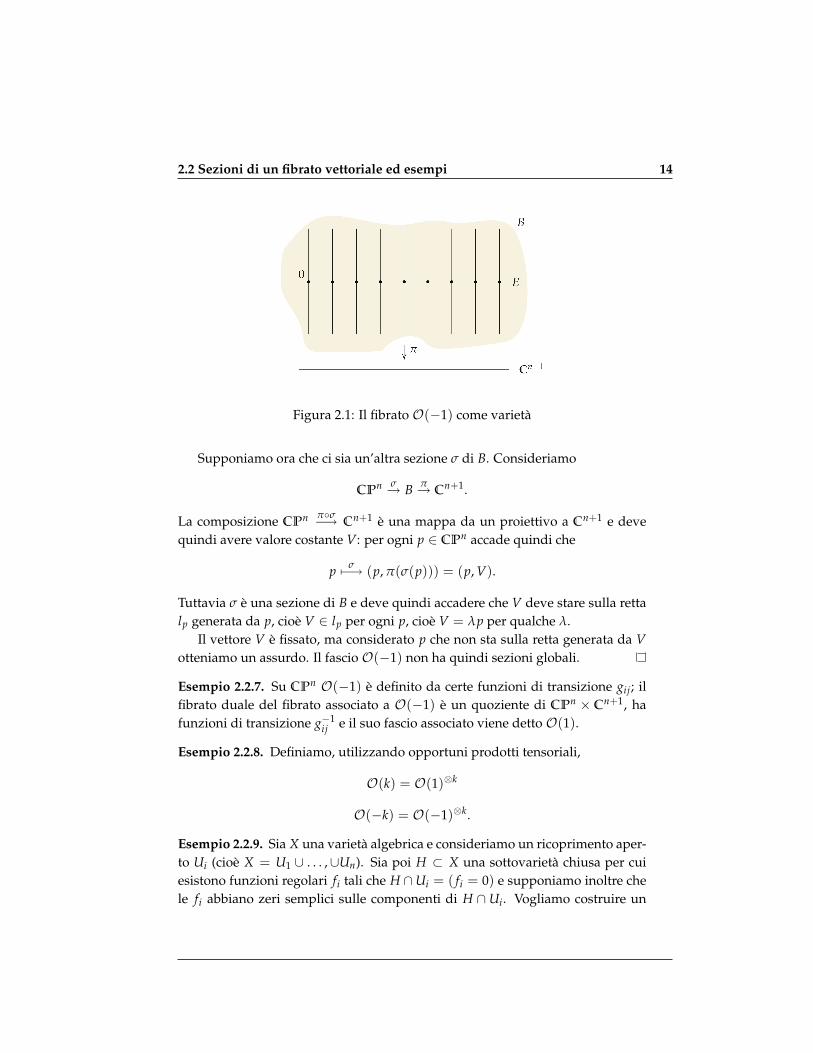
dove B e il blow-up ed E e il suo luogo eccezionale. Affermiamo che E e lasezione nulla del fibrato; il divisore eccezionale passa infatti per l’origine di tuttele rette vettoriali associate ad ogni punto di Cn+1 (vedi Figura 2.1).
2.2 Sezioni di un fibrato vettoriale ed esempi 14
Figura 2.1: Il fibrato O(−1) come varieta
Supponiamo ora che ci sia un’altra sezione σ di B. Consideriamo
CPn σ→ B π→ Cn+1.
La composizione CPn πσ−→ Cn+1 e una mappa da un proiettivo a Cn+1 e devequindi avere valore costante V: per ogni p ∈ CPn accade quindi che
p σ7−→ (p, π(σ(p))) = (p, V).
Tuttavia σ e una sezione di B e deve quindi accadere che V deve stare sulla rettalp generata da p, cioe V ∈ lp per ogni p, cioe V = λp per qualche λ.
Il vettore V e fissato, ma considerato p che non sta sulla retta generata da Votteniamo un assurdo. Il fascio O(−1) non ha quindi sezioni globali.
Esempio 2.2.7. Su CPn O(−1) e definito da certe funzioni di transizione gij; ilfibrato duale del fibrato associato a O(−1) e un quoziente di CPn × Cn+1, hafunzioni di transizione g−1
ij e il suo fascio associato viene detto O(1).
Esempio 2.2.8. Definiamo, utilizzando opportuni prodotti tensoriali,
O(k) = O(1)⊗k
O(−k) = O(−1)⊗k.
Esempio 2.2.9. Sia X una varieta algebrica e consideriamo un ricoprimento aper-to Ui (cioe X = U1 ∪ . . . ,∪Un). Sia poi H ⊂ X una sottovarieta chiusa per cuiesistono funzioni regolari fi tali che H ∩Ui = ( fi = 0) e supponiamo inoltre chele fi abbiano zeri semplici sulle componenti di H ∩ Ui. Vogliamo costruire un

2.2 Sezioni di un fibrato vettoriale ed esempi 15
fibrato O(H) su X e una sezione s per cui H = (s = 0). Se consideriamo la cartaaggiuntiva U0 = X − H e la mappa f0 = 1, il fibrato O(H) e definito dalle
gij : (Ui ∩Uj)×C → (Ui ∩Uj)×C (x, z) 7→(
x,f j(x)fi(x)
z)
.
Osserviamo, considerando che il motivo di questa osservazione sara piu chiaroquando parleremo di divisori, che nel caso in cui X e liscia e H ha codimensione1 le condizioni per definire O(H) risultano automaticamente soddisfatte. Nelcaso particolare in cui X = CPn e H e un iperpiano, si ha che O(H) ' O(1).
Esempio 2.2.10. Se X e una varieta algebrica, il fibrato strutturale di X si indicacon OX ed e dato dalla funzioni regolari su aperti U di X.
Esempio 2.2.11 (Fibrato tangente). Se V ⊂ Cn e una sottovarieta affine liscia didimensione k e x ∈ V, lo spazio tangente a V in x e un k-spazio vettoriale. Alvariare di x otteniamo quindi il fibrato vettoriale TV di rango k = dim V dettofibrato tangente. Nel caso proiettivo, W ⊂ CPn, il fibrato tangente TW e costruitoutilizzando opportune carte affini; se zi e un sistema di coordinate analitichelocali, le sezioni locali di TW sono nella forma
z 7→ ∑ fi(z)∂
∂zi.
Esempio 2.2.12 (Fibrato cotangente e fibrato canonico). Nelle notazioni dell’e-sempio precedente, il duale di TW e detto fibrato cotangente e si indica Ω1
W . Lesezioni sono date dalle 1-forme su W e sono nella forma
z 7→ ∑ fi(z)dzi.
Particolare interesse ha il fibrato ΩkW definito come det Ω1
W ; se k e la dimen-sione di W, Ωk
W e il fibrato lineare delle k forme su W le cui sezioni sono deltipo f (z) dz1 ∧ . . . ∧ dzk. Spesso viene denotato KW e prende il nome di fibratocanonico.
Esempio 2.2.13 (Fibrato Normale). Siano V ⊂ W varieta lisce e consideriamo lasuccessione
0 → TV → TW |V → ? → 0.
Definiamo fibrato normale la parte mancante affinche la successione sia esatta;risulta pertanto che
NV|W =TW |V
TV.
Analiticament risulta che NV|W ⊕ TV = TW |V; considerando i duali e poi i de-terminanti, in qualche senso, si ottiene una compatibilita globale che permette diotterere che
KV = KW |V ⊗ det NV|W .

2.2 Sezioni di un fibrato vettoriale ed esempi 16
Uno delle questioni piu interessanti riguardanti i fibrati vettoriali riguarda ladescrizione dello spazio delle sezioni globali. Il seguente teorema fornisce unaprima grande informazione.
Teorema 2.2.14. Se p : V → X un fibrato vettoriale su una varieta proiettiva X allorala dimensione di Γ(X, V) e finita.
Le sezioni del fibrato triviale X × C su una varieta proiettiva connessa cor-rispondono alle mappe regolari X → C, ma, dal momento che X e proiettiva, lemappe regolari X → C sono solamente le mappe costanti. Risulta pertanto che
Γ(X,OX) = C.
Sia ora L un fibrato lineare (cioe di rango 1) su X e s una sezione mai nullas : X → L. La mappa data da
f : X ×C → L; (x, z) 7→ zs(x)
permette di affrmare che L e isomorfo al fibrato triviale OX . Abbiamo quindi chese L ha una sezione mai nulla allora e il fibrato triviale.
Dati due fibrati vettoriali V1 e V2 su X la mappa
Γ(X, V1)⊗ Γ(X, V2) → Γ(X, V1 ⊗V2); (s1 ⊗ s2)(x) 7→ s1(x)⊗ s2(x)
e ovviamente bilineare.Una facile applicazione di quanto appena visto porta al seguente risultato
Fatto 2.2.15. Sia X una varieta proiettiva, L un fibrato lineare su X ed L−1 il suo duale;se L e L−1 hanno sezioni non banali allora L ∼= OX
Consideriamo ora un fibrato lineare L e sia s una sua sezione non banale; cisi puo domandare come si possa fare a costruire, a partire da s, altre sezioni delfibrato.
Fatto 2.2.16. Nella situazione sopra descritta, le sezioni di L sono date da t = f · s dovef e una funzione razionale i cui poli vengono cancellati dagli zeri di s.
Dimostrazione. Se t e un’altra sezione di L allora f = t/s e una funzione razionalesu X e, moltipicando punto a punto f · s definisce, con la condizione sui poli esugli zeri della 2.2.16, una nuova sezione t.
Esempio 2.2.17 (Sezioni di Γ(CPn,O(k))). Accade che il fibrato O(1) puo essereinterpretato come quoziente di CPn × Cn+1 modulo il sottofibrato determinato

2.2 Sezioni di un fibrato vettoriale ed esempi 17
dalle equazioni ∑ xizi. Consideriamo infatti il seguente diagramma
CPn ×Cn+1 σ //
##HHH
HHHH
HHO(1)
CPn.
Fissato un punto x = [x0 : . . . : xn] ∈ CPn il nucleo della mappa ristretta sullafibra di x
σ : Cn+1 → O(1)
e dato dagli elementi (z0, . . . , zn) tali per cui
∑ xizi = 0.
Risulta pertanto
O(1) ' CPn ×Cn+1
ker σ.
Accade che l’elemento [1 : 0 : . . . : 0] produce una sezione s che si annulla sul-l’iperpiano all’infinito x0 = 0; se f e una funzione regolare sull’aperto coordinatoU0 ∼= Cn le altre sezioni sono t = f · s dove f deve avere al piu un polo semplicesull’iperpiano all’infinito in modo da cancellare gli zeri di s. Risulta quindi che
f = ∑ aixix0
.
Le sezioni di O(1) si possono identificare quindi con polinomi lineari omogenei∑ aixi e di conseguenza dim Γ(CPn,O(1)) = n + 1. Dal momento che un poli-nomio lineare omogeneo definisce un iperpiano H in CPn, il fibrato O(1) risultain qualche senso determinato dall’iperpiano H e quindi abbiamo l’isomorfismoO(1) ' O(H).
Fissata la sezione s di O(1) come sopra, una sezione di O(k), k > 0 e da-ta da s ⊗ · · · ⊗ s; le altre sezioni si producono moltiplicando s per una fun-zione f avente almeno k poli ad infinito. Le sezioni di O(k) si possono pertantoidentificare con polinomi omogenei di grado k in x0, . . . , xn e quindi
dim Γ(CPn,O(k)) =(
n + kn
).
Se k < 0 accade cheO(k) non ha sezioni globali. Se infatti le avesse avremmo cheO(k) ⊗O(−k) = O e quindi, per il fatto 2.2.15, dovremmo avere O(−k) ∼= Oche e assurdo.
Lo studio dei fibrati lineari su una varieta proiettiva e estremamente utileperche permette di ottenere molte informazioni sulle proprieta geometriche della

2.3 Divisori: un primo approccio 18
varieta stesssa. Il mezzo attraverso il quale otterremo queste informazione e lacostruzione di opportune mappe. Ad un fibrato L su una varieta X e infattiassociata una mappa razionale naturale X 99K CPn per qualche n. Accade infattiche Γ(X, L) e uno spazio vettoriale con una certa base s0, . . . , sn. Possiamo quindidefinire
X → CPn; x 7→ [s0(x) : . . . : sn(x)].
Esempio 2.2.18 (Prodotto di Varieta). Siano X e Y varieta proiettive lisce e sianop : X × Y → X e q : X × Y → Y le proiezioni sui diversi fattori. Dal momentoche TX×Y = p∗TX ⊗ q∗TY, considerando i determinanti si ottiene che
KX×Y = p∗KX ⊗ q∗KY.
2.3 Divisori: un primo approccio
In questa sezione introduciamo il concetto di divisore che sara fondamentale peril linguaggio che svilupperemo in seguito. Cercheremo nello specifico di formareun’intuizione del concetto senza scendere in profondita nei dettagli; il tutto verrapoi precisato nelle sezioni successive.
Fondamentali per gli sviluppi futuri saranno le osservazioni a proposito dellerelazioni tra divisori e fibrati lineari.
Consideriamo una varieta X di dimensione n e sia V ⊂ X una varieta dicodimensione 1; e ragionevole pensare che il piu delle volte capita che, presop ∈ V, sia possibile trovare una funzione che definisce V in un intorno di p inmodo che V sia data localmente come un’ipersuperficie.
Definizione 2.3.1. Un divisore D di X e una somma formale finita di ipersuperficieirriducibili di X:
D = ∑ aiVi. (2.1)
Diciamo che D e effettivo se ai > 0 per ogni i; se D e un divisore effettivo scriviamoD > 0. L’insieme dei divisori di X risulta essere naturalmente un gruppo abeliano.
Consideriamo ora il dato locale di una funzione razionale f in modo che lo-calmente si possa scrivere f = g/h dove g e h sono delle funzioni regolari. Nelcaso in cui la varieta X non sia normale possiamo considerare la sua normaliz-zazione X e lavorare poi con mappe indotte; abbiamo quindi un modo naturaledi associare un divisore alla funzione f ponendo
div( f ) = Zeri(g)− Zeri(h) = Zeri( f )− Poli( f ). (2.2)
Come precedentemente annunciato, e possibile mettere in relazione il con-cetto di divisore con quello di fascio; mettiamo ora in luce questi collegamenti

2.4 Fibrati lineari 19
facendo particolare riferimento a quanto riportato in [GH94]. A tal fine sia M∗ ilfascio delle funzioni razionali e O∗ il fascio delle funzioni regolari invertibili suuna certa varieta X.
Fatto 2.3.2. Un divisore (di Cartier) D su X e una sezione globale del fascio quozienteM∗/O∗.
Il Fatto precedente ci permette quindi, grazie all’identificazione
H0(X,M∗/O∗) = Divisori su X, (2.3)
di stabilire una forte parentela tra i divisori e la Teoria dei Fasci.Consideriamo ora una mappa tra due varieta π : X → Y, e possibile costruire
una mappaπ∗ : Div(Y) → Div(X) (2.4)
tirando indietro i divisori. Preso infatti un divisore D su Y abbiamo una naturaleidentificazione
D ! (Ua, fa), (2.5)
dove Ua e un ricoprimento e fa sono le funzioni che localmente definisconoD. Definiamo quindi il pullback π∗D come il divisore su X
π∗D ! (π−1(Ua), π∗ fa). (2.6)
2.4 Fibrati lineari
Nelle sezioni precedenti ci siamo occupati in generale di fibrati vettoriali; in ques-ta sezione ci dedichiamo nello specifico di fibrati vettoriali di rango 1 che ven-gono detti anche fibrati in rette o, con la notazione che useremo piu di frequente,fibrati lineari. Riprendendo quanto gia visto in generale, abbiamo che dare unfibrato lineare L su una varieta X equivale a dare una mappa π : L → X e, fis-sato un certo ricoprimento Ua, delle mappe ϕa : LUa → Ua × C dove LUa =π∗−1(Ua) e delle funzioni di transizione gab : Ua ∩Ub → C∗ che soddisfano lecondizioni di compatibilita
gab · gba = 1gab · gbc · gca = 1
(2.7)
Un fibrato, in particolare un fibrato lineare, essendo dato essenzialmente dallesue funzioni di transizione, puo essere naturalmente interpretato nell’ambitodella Teoria dei Fasci. Se infatti un fibrato L e dato da funzioni di transizionegab ∈ O∗(Ua ∩Ub), l’insieme gab rappresenta naturalmente una 1-cocatena di

2.5 Divisori e fibrati lineari 20
Cech su X a coefficienti in O∗ e le condizioni di compatibilita garantiscono chegab sia un cociclo.
L’insieme delle classi di isomorfismo di fibrati lineari su X non e altro chel’insieme H1(X,O∗). Su questo insieme e possibile dare, a meno di isomorfismo,una naturale struttura di gruppo. Se infatti L ed L′ sono due fibrati dati da fun-zioni di transizione rispettivamente gab e g′ab, il fibrato prodotto tenrorialeL ⊗ L′ sara dato da gab · g′ab e il fibrato duale L∗ avra funzioni di transizioneg−1
ab .
Definizione 2.4.1. Con le operazioni di prodotto tensoriale tra fibrati e duale di unfibrato, l’insieme H1(X,O∗) e un gruppo e viene detto Gruppo di Picard della varietaX:
Pic(X) = fibrati lineari su X.
2.5 Divisori e fibrati lineari
Abbiamo osservato che sia i divisori sia i fibrati lineari possono essere, in qualchesenso, interpretati nell’ambito della Teoria dei Fasci; che relazione c’e tra Div(X)e Pic(X)? L’obiettivo di questa sezione e dare risposta a questa domanda.
Consideriamo un divisore D su una varieta X dato da ( fa, Ua) dove fa ∈M∗(Ua). Le funzioni
gab =fa
fb,
lette come funzioni di transizione, permettono di definire il fibrato lineare asso-ciato a D che indichiamo, con un certo abuso di linguaggio, con O(D); ques-ta corrispondenza risulta ben definita e possiamo ricavarne alcune immediateproprieta.
Presi due divisori D e D′ dati ripettivamente da fa e f ′a si ha che ildivisore D + D′ e dato da fa · f ′a.
Fatto 2.5.1. Per quanto osservato risulta che
O(D + D′) = O(D)⊗O(D′)
e quindi che la mappaO : Div(X) → Pic(X) (2.8)
e un omomorfismo di gruppi.
Tentiamo di trovarne il nucleo in modo da poter applicare il Teorema Fonda-mentale di Isomofismo

2.6 Divisori: scendiamo in profondita 21
Consideriamo ora il divisore D = div( f ) per qualche f . Il dato locale chedefinisce D non e altro che fa = f |Ua ; per definizione il fibrato associato O(D) edato da funzioni di transizione
fa
fb= 1,
e quindi O(D) e isomorfo al fibrato banale. D’altro lato, se D e dato da fa e ilsuo fibrato associato e banale, a meno di raffinare ulteriormente il ricoprimento,si ha che esistono funzioni ha ∈ O∗(Ua) per cui
fa
fb= gab =
ha
hb.
La funzione f = fa · h−1a = fb · h−1
b e quindi una sezione globale del fibrato erisulta D = div( f ).
Fatto 2.5.2. Dato un divisore D, il suo fibrato lineare associato O(D) e banale se e solose D = div( f ) per qualche f .
Grazie a quanto visto, abbiamo un modo naturale per rendere la mappa (2.8)un isomorfismo.
Definizione 2.5.3. Diciamo che due divisori D e D′ sono linearmente equivalenti escriviamo D ∼ D′ se per qualche f ∈ M∗(X)
D = D′ + div( f ) o, equivalentemente, O(D) = O(D′). (2.9)
E immediato osservare il seguente risultato.
Teorema 2.5.4. Nella situazione precedentemente descritta
Pic(X) ' Div(X)∼ .
Questa identificazione ci sara molto utile per confondere il linguaggio deidivisori con quello dei fibrati e fornisce una giustificazione teorica per l’utiliz-zo della notazione additiva in luogo della notazione moltiplicativa nel trattarefibrati lineari.
2.6 Divisori: scendiamo in profondita
In questa sezione ci occupiamo di aggiornare, espandere e perfezionare il nostrobagaglio culturale riguardante i divisori al quale abbiamo accennate nelle sezioniprecedenti. Avendo gia costruito un’idea intuitiva di quanto deve accadere,ripartiamo dalle definizioni di base.

2.6 Divisori: scendiamo in profondita 22
Definizione 2.6.1. Data una varieta X, diciamo divisore primo una sottovarieta ir-riducibile di X di codimensione 1. Un divisore di Weil e una combinazione formalefinita
D = ∑ diDi
dove di ∈ Z nulli tranne in un numero finito di casi e Di e un divisore primo.L’insieme dei divisori di Weil forma un gruppo, denotato WDiv(X), con la naturale
operazione di somma componente a componente:
∑ diDi + ∑ eiDi = ∑(di + ei)Di
dove la somma e estesa a tutti i divisori primi.Un divisore di Weil D = ∑ diDi e detto effettivo se per ogni i, di > 0; in tal caso
scriviamo D > 0.
Una piccola nota prima di continuare con le definizioni; nel caso in cui la va-rieta considerata sia normale non abbiamo difficolta nel trattare funzioni razion-ali f , d’altra parte in caso contrario consideriamo la normalizzazione X di X elavoriamo con le funzioni razionali indotte; supponiamo pertanto di lavorarenell’ipotesi di normalita.
Definizione 2.6.2. Data una funzione razionale non nulla f il divisore principaleassociato ad f e il divisore dato dagli zeri meno i poli di f :
div( f ) = zeri( f )− poli( f ).
Fatto 2.6.3. Nel caso in cui D sia un divisore su una varieta normale X e U = X−Xsing
il suo luogo non singolare, dal momento che dim XSing 6 dim X − 2, si ha che ognidivisore e univocamente determinato dalla sua restrizione su U.
Definizione 2.6.4. Diciamo che due divisori D e D′ sono linearmente equivalenti,D ∼ D′, se differiscono di un divisore principale:
D− D′ = div( f ) per qualche f .
Definizione 2.6.5. Diciamo sistema lineare corrispondente al divisore D l’insieme
|D| = D′ > 0 tali che D ∼ D′.
Il sistema lineare associato ad un divisore D risulta essere uno spazio proiet-tivo; |D| e infatti isomorfo al proiettivizzato delle sezioni del fascio O(D) cano-nicamente associato al divisore D. La corrispondenza tra divisori e fasci ci per-mette di passare con facilita dal linguaggio dei divisori al linguaggio dei fasci;cosı facendo avremo modo di godere ogni volta dei vantaggi delle due teorie.

2.6 Divisori: scendiamo in profondita 23
Definizione 2.6.6. Dato un divisore di Weil D ∈ WDiv(X), il fascio ad esso associatoe il fascio OX(D) le cui sezioni sono
Γ(U,OX(D)) = f ∈ k(X)|div( f ) + D|U ≥ 0.
Osserviamo che le sezioni globali di OX(D) non sono altro le funzioni razio-nali aventi poli al piu su D.
Abbiamo quindi che |D| ∼= PH0(OX(D)) e per un noto Teorema sara un certoPk di dimensione finita; l’intero k viene detto dimensione del sistema lineare |D|.
Definizione 2.6.7. Dato un divisore D, il luogo base di D e dato da
Bs(D) =⋂
D′∈|D|Supp(D),
dove Supp(D) e il supporto di D cioe il sottoinsieme di X dato dai punti di D.
Se |D| 6= ∅ allora, come abbiamo gia osservato, si ha che |D| ∼= Pk. In questasituazione, al divisore D si puo associare una mappa razionale da X al duale diuno spazio proiettivo
ϕ|D| : X 99K (Pk)∗.
Posto U = X − Bs(D), la mappa ristretta a U risulta essere un morfismo; ses0, . . . , sk e una base di H0(X,OX(D)), la mappa ϕ|D| e data da
ϕ|D||U(x) = [s0(x) : . . . : sk(x)].
Definizione 2.6.8. Dato un divisore D, se Bs(D) = ∅, si dice che D e privo dipunti base (base point free). Questo risulta essere equivalente al fatto che, qualsiasicosa voglia dire, il fascio OX(D) e generato da sezioni globali, cioe che OX(D) e unOX-modulo ed esiste una successione esatta
⊕OX → OX(D) → 0.
E cosa buona osservare che la mappa ϕD non e sempre un morfismo ovunquedefinito; tuttavia nel caso particolare in cui D non ha punti base ϕD definisce unmorfismo.
Definizione 2.6.9. Un k-ciclo e una combinazioni lineare formale a coefficienti in Z
di sottovarieta irriducibili di dimensione k. L’insieme dei k-cicli di una varieta X si de-nota Zk(X) e risulta essere un gruppo abeliano rispetto all’operazione di somma definitacomponente a componente. In particolare Zn−1(X) = WDiv(X).
Cerchiamo ora di costruire un oggetto fondametale per gli sviluppi succes-sivi: i divisori di Cartier. A tal fine sia M∗ il fascio delle funzioni razionali suuna varieta X e sia O∗
X il fascio delle funzioni regolari invertibili. Posto
Q =M∗
O∗X
,

2.6 Divisori: scendiamo in profondita 24
abbiamo la successione esatta corta
1 → O∗X →M∗ → Q → 1. (2.10)
La (2.10) induce la successione esatta lunga in coomologia di Cech
1 → H0(O∗X) → H0(M∗) → H0(Q) → H1(O∗
X) → H1(M∗)
cioe
1 → H0(O∗X) →M∗ → H0
(M∗
O∗X
)→ Pic(X) → 1.
Definizione 2.6.10. Un divisore di Cartier su X e una sezione globale di M∗/O∗X ;
i divisori di Cartier formano un gruppo denotato Div(X) e si ha l’identificazione
Div(X) ' Γ(X,M∗/O∗).
Per i divisori di Cartier la relazione di equivalenza lineare puo essere lettaanche sulle funzioni che definiscono i divisori coinvolti.
Definizione 2.6.11. Diciamo che due divisori di Cartier individuati rispettivamente daldato di due sezioni ϕi e ψi sono linearmente equivalenti se
ϕi · ψi = f ∈ O∗X ,
cioe e una sezione nulla nel quoziente M∗/O∗X .
Osserviamo che i divisori definiti nella sezione 2.3 sono proprio i divisori diCartier che abbiamo appena definito.
Fatto 2.6.12. Dato divisore di Cartier D su X si ha quindi che e possible costruire unavarieta di codimensione 1 V e un ricoprimento aperto Ui della varieta X in modo cheesistano gi ∈ k(X)∗ tali che
V ∩Ui = div(gi) ∩Ui.
Puo essere utile avere a disposizione gualche grado di liberta in piu nella ma-nipolazione algebrica; a tal fine, se A e un anello, diciamo che D e un A-divisorese e una combinazione lineare a coefficienti in A; tipicamente puo succedere diavere a che fare con A = Q o R.
Definizione 2.6.13. Un Q-divisore D e detto divisore Q-Cartier se esiste un numeronaturale tale che mD e di Cartier. La varieta X si dice Q-fattoriale se ogni Q-divisore eQ-Cartier.

2.7 Cartier contro Weil 25
Osserviamo che un divisore D e di Cartier se e solo se il fascio ad esso as-sociato OX(D) e invertibile o, equivalentemente, ad esso e associato un fibratolineare.
L’importanza dei divisori di Cartier risiede nella possibilita, in presenza dimappe tra varieta, di tirare indietro i divisori da una varieta ad un’altra comespiegato dalla seguente definizione.
Definizione 2.6.14. Se D e un divisore di Cartier su Y e
π : X → Y
una mappa, nella situazione precedentemente descritta, il pullback di D e il divisoreπ∗D su X definito da gi f sull’aperto f−1(Ui).
Un’altra definizione per espandere il nostro linguaggio.
Definizione 2.6.15. Se K e un certo Z-modulo, poniamo WDivK(X) = WDiv(X)⊗Z
K e, equivalentemente, DivK(X) = Div(X)⊗Z K.Diremo che due divisori D e D′ si dicono linearmente equivalenti su K, e si scrive
D ∼K D′, seD− D′ = ∑ didiv( fi) per fi ∈ k(X) e di ∈ K.
2.7 Cartier contro Weil
Nella sezione precedente abbiamo introdotto due differenti nozioni di divisori:di divisori di Weil e i divisori di Cartier. Per come sono stati costruiti, i divisoridi Weil hanno il vantaggio di essere geometricamente piu significativi e intuiti-vamente piu visualizzabili rispetto ai divisori di Cartier; d’altra parte gli elemen-ti di Div(X), descritti in modo piu algebrico, hanno l’enorme e fondamentalevantaggio di poter essere facilmente tirati indietro.
In questa sezione ci occupiamo di investigare le relazioni tra WDiv(X) eDiv(X).
Nel caso liscio tutto e molto semplice.
Fatto 2.7.1. Se X e una varieta liscia allora WDiv(X) = Div(X).
Per gli sviluppi successivi sara tuttavia necessario non limitarsi a considerarevarieta liscie, ma avremo sempre a che fare con varieta normali. Risulta quindiimportante la seguente osservazione.
Fatto 2.7.2. Se X e una varieta normale abbiamo un’iniezione Div(X) → WDiv(X)e quindi anche i divisori di Cartier possono essere trattati come combinazioni lineariformali di sottovarieta di codimensione 1.

2.7 Cartier contro Weil 26
E interessante notare che nel caso di varieta non normali questa inclusione efalsa: possiamo avere divisori di Cartier che non sono di Weil. Consideriamo adesempio la retta proiettiva CP1 e la cuspide K di equazione y2 = x3 e la mappadi proiezione
CP1 π−→ Kk 7−→ (t2, t3).
La successione1 → O∗
K → π∗O∗CP → C → 0 (2.11)
e esatta in quanto il quoziente π∗O∗CP/O∗
K puo essere identificato con i polinominella forma 1 + ct al variare di c ∈ C. La (2.11) induce la successione esatta lunga
H0(O∗K) → H0(π∗O∗
CP) → H0(C) → H1(O∗K) → H1(π∗O∗
CP) → 0. (2.12)
Dal momento che H0(O∗K) = C∗ e H0(π∗O∗
CP) = H0(OCP) = C∗ abbiamoessenzialmente che la successione esatta
0 → C → Pic(K) → Pic(CP1) → 0 (2.13)
ci assicura che
Pic(CP1) =Pic(K)
C.
Accade che la mappa Div(K) → Div(CP1) ha nucleo C e abbiamo quindi adisposizione il segmento esatto
0 → C → Div(K) → Div(CP1) → 0.
La situazione e quindi descritta dal seguente diagramma di successioni esatte
0
0
C
C
0 // H0(O∗
K) // H0(K,M∗) // Div(K) //
Pic(K) //
0
0 // H0(O∗CP) // H0(CP,M∗) // Div(CP) //
Pic(CP) //
0
0 0
(2.14)
Investighiamo ora la relazione tra Pic(K) e WDiv(K). Innanzitutto osserviamoche c’e un isomorfismo tra WDiv(CP) e WDiv(K) in quanto abbiamo una cor-rispondenza biunivoca tra i punti di CP e i punti di K. Abbiamo poi che, siccomeCP e liscio, WDiv(CP) ' Div(CP).

2.8 Divisori particolari 27
Riassumendo si ha Div(CP) ' WDiv(CP) ' WDiv(K) e quindi ancheDiv(CP) ' WDiv(K).
Fatto 2.7.3. Non puo esistere un’immersione Div(K) → Div(CP) ' WDiv(K) equindi non sempre i divsori di Cartier sono un sottogruppo dei divisori di Weil.
Dimostrazione. Per assurdo. Se esistesse una iniezione i : Div(K) → Div(CP)avremmo che i dovrebbe avere nucleo nullo, in contraddizione con il diagramma(2.14).
In generale, se X e una varieta, la situazione e descritta dal diagramma
Div(X) //
WDiv(X)
Div(X − Xsing) // WDiv(X − Xsing)
Accade che la mappa in basso risulta essere un isomorfimo poiche si ha a che farecon varieta liscie e inoltre accade che anche la mappa a destra e un isomorfismo;si ha quindi che la mappa in alto e iniettiva se e solo se lo e quella di sinistra.Osserviamo che nel caso in cui X sia una varieta normale, in virtu del Teoremadi Hartogs, la mappa di sinistra e iniettiva e si ha pertanto che i divisori di Cartiersono anche divisori di Weil.
2.8 Divisori particolari
Una delle idee vincenti che ci accompagneranno d’ora in avanti sara l’attenzioneparticolare a due tipologie di sottovarieta: divisori e curve (1-cicli). Per ragioni didimensione, l’intersezione tra una sottovarieta di dimensione n− 1 e una curva(dimensione 1), sara qualcosa di dimensione 0. In qualche senso avremo a chefare con somme di punti e numeri.
In virtu delle definizioni date, un divisore su una curva non e altro che unacombinazione lineare di punti ∑ diPi.
Definizione 2.8.1. Se C e una curva proiettiva e D = ∑ diPi un divisore su C,definiamo grado di D su C il numero
deg(D) = ∑ di.
Definizione 2.8.2. Se D e un divisore di Cartier su una varieta proiettiva X e C e unacurva contenuta in X, l’intersezione di D e C e data da
D · C = deg(i∗D),

2.8 Divisori particolari 28
dove i : C′ → X e la mappa indotta dalla normalizzazione di C a X.
C′i
@@@
@@@@
n
C // X
Introduciamo ora una nuova relazione di equivalenza.
Definizione 2.8.3. Due divisori di Cartier D e D′ si dicono numericamenteequivalenti, D ≡ D′, se per ogni curva C ⊂ X risulta
(D− D′) · C = 0.
L’equivalenza numerica induce relazioni di equivalenza sia sulle curve (cioe in Z1(X)),sia sui divisori (cioe in Div(X)). Definiamo quindi
N1(X) = DivR(X)/ ≡ e N1(X) = (Z1(X)⊗Z R)/ ≡ .
Osserviamo che N1(X) e N1(X) sono spazi vettoriali duali su R e la loro dimensioneviene detta numero di Picard di X e si indica ρ(X).
Definizione 2.8.4 (Cono delle curve effettive). Con il nuovo linguaggio introdot-to abbiamo che il cono delle curve effettive (o cono di Mori) di una varieta X e lachiusura NE(X) di
NE(X) =∑ aiCi con ai ∈ R e Ci curva
⊂ N1(X).
Diamo ora un risultato tanto ragionevole quanto utile per le applicazioni.
Teorema 2.8.5 (Formula di proiezione). Se f : X → Y e un morfismo tra varietaproiettive, data una curva irriducibile C ⊂ X, poniamo f∗(C) = d f (C) dove d =deg(C → f (C)) e f∗(C) = 0 se f (C) e un punto. Per qualsiasi divisore di Cartier Ddi Y si ha che
f ∗D · C = D · f∗C.
Osservazione 2.8.6. L’importanza della formula di proiezione risiede nel fattoche permette di costruire morfisimi ben definiti
N1(Y) → N1(X) e N1(X) → N1(Y).
Dopo questa lunga serie di definizioni generali, andiamo ora a caratterizzareparticolari tipi di divisori.
Definizione 2.8.7. Un divisore di Cartier D e detto molto ampio se e privo di puntibase e la mappa ϕD indotta e un embedding di X su P?. Un divisore D Q-Cartier e dettoampio se mD e molto ampio per qualche m > 0.

2.8 Divisori particolari 29
Il seguente teorema caratterizza i divisori ampi.
Teorema 2.8.8 (Criterio di Kleiman). Sia X una varieta proiettiva, D divisore Q-Cartier. Le seguenti affermazioni sono equivalenti.
1. D e ampio;
2. per ogni C ∈ NE(X)− 0 si ha che D · C > 0.
Definizione 2.8.9. Un divisore D su una varieta X e detto nef (numerically eventu-ally free) se per un qualsiasi 1-ciclo C effettivo
D · C > 0.
Fatto 2.8.10. Se X e una varieta proiettiva e H e un divisore ampio, un divisore D su Xe nef se e solo se D + εH e ampio per ogni ε > 0 razionale.
Dimostrazione. L’idea e che, in un qualche senso, H > 0 mentre D > 0; la sommasara quindi strettamente positiva.
Se D e nef abbiamo infatti che
(D + εH) · C = D · C︸ ︷︷ ︸>0
+ εH · C︸ ︷︷ ︸>0
> 0,
cioe D + εH ampio.Viceversa se D + εH e ampio abbiamo che
limε→0
(D + εH) · C = D · C,
ma essendo (D + εH) · C > 0 il limite sara D · C > 0, cioe D e nef.
Definizione 2.8.11. Un divisore D si dice semiampio se |mD| e privo di punti baseper qualche m > 0.
Definizione 2.8.12. Dato un divisore D (o, equivalentemente, un fibrato lineare L), ladimensione di Kodaira e
κ(D) = maxm>0
dim ϕmD(X).
Se h0(OX(mD)) = 0, poniamo κ(D) = −∞.
Definizione 2.8.13. Un divisore D e big se κ(D) = dim(X).
Fatto 2.8.14. Risulta che un divisore big si puo scrivere come somma di un divisoreampio e un divisore effettivo.

2.8 Divisori particolari 30
Definizione 2.8.15. Data una varieta X, la dimensione di Kodaira di X e
κ(X) = κ(KX).
Una varieta si dice di tipo generale se la sua dimensione coincide con la dimensione diKodaira.
Abbiamo gia parlato di fibrato canonico, vediamo che ad esso risulta associa-to un opportuno divisore che sara una vera e propria stella nel Programma diMori
Definizione 2.8.16. Consideriamo una varieta normale X e sia i : U → X l’inclusionedel luogo non singolare in X. U risulta essere una aperto di codimensione > 2; possiamoquindi considerare il fascio invertibile ωU delle forme di ordine massimo su U. Le sezionidi ωU sono localmente date da
f · dz1 ∧ · · · ∧ dzn,
dove z1, . . . , zn sono coordinate locali e f e una funzione regolare. Definiamo fasciocanonico il fascio
ωX = i∗ωU
dove i∗ e data dalla restrizione e le cui sezioni su un aperto A sono date da
ωX(A) = ωU(X ∩ A).
Il divisore canonico di X e un divisore di Weil KX tale che
OX(KX) = ωX .
Fatto 2.8.17. Il divisore canonico e definito a meno di equivalenza lineare.
Dimostrazione. Se σ e una n-forma razionale accade che
KX = Zeri(σ)− Poli(σ).
Se ora η e un’altra forma per cui Zeri(σ)− Poli(σ) = K′X abbiamo che
σ =fg· dz1 ∧ · · · ∧ dzn e η =
hk· dz1 ∧ · · · ∧ dzn,
ma alloraσ
η=
fg· k
he una funzione razionale e si ha, esplicitando le definizione dei vari addendi, che
KX = K′X + div(
f kgh
).

2.8 Divisori particolari 31
Come precedentemente annunciato, il divisore canonico associato al fibratodelle forme di ordine massimo rivestira un ruolo fondamentale. Calcoliamo ilcanonico dello spazio proiettivo.
Esempio 2.8.18 (KCPn ). Accade che
KCPn ' O(−(n + 1)) ' −(n + 1)H
dove H e un iperpiano di CPn. Consideriamo z0 : . . . : zn coordinate di CPn econcentriamoci su un aperto affine di coordinate wi = zi
z0. Consideriamo la forma
ω =dw1
w1∧ . . . ∧ dwn
wn.
Osserviamo che ω non ha zeri e ha poli sugli iperpiani (wi = 0), i = 1, . . . , ne cioe su (zi = 0), i = 1, . . . , n. Cosa accade sull’iperpiano (z0 = 0)? Con unopportuno cambio di coordinate, poniamo
ti =zizj
, i = 0, 1, . . . ,j , . . . , n.
Otteniamo quindi wi = zi
z0= zi
z0· zj
zj= ti
t0i 6= j
wj = 1t0
e quindidwiwi
=t0
t1
(1t0
dti − ti1t20
dt0
).
Riassumendo dwiwi
= dtiwi− dt0
t0i 6= j
dwjwj
= −dt0t0
Nel caso n = 2 e j = 2 otteniamo, ad esempio che
dw1
w1∧ dw2
w2=(
dt1
t1− dt0
t0
)∧(−dt0
t0
)=
dt0
t0∧ dt1
t1.
Si ha quindi che abbiamo un polo di molteplicita 1 anche sull’iperpiano (t0 = 0)e quindi la sezione ω ha poli su n + 1 iperpiani e quindi
KCPn = −(n + 1)H.

2.9 Formule di Aggiunzione 32
2.9 Formule di Aggiunzione
In questa sezione presentiamo uno degli strumenti piu potenti che abbiamo adisposizione per il calcolo esplicito del divisore canonico: la Formula di Ag-giunzione. Questa formula permette di scrivere una relazione tra il divisorecanonico di una varieta e una sua varieta di codimensione 1 permettendoci cosıdi conoscere divisori canonici di varieta di dimensione alta a partire da infor-mazioni su varieta di dimensione inferiore.
Consideriamo una varieta liscia X e V un’ipersuperficie liscia. Sappiamo cheil fibrato normale NV|X e dato dal quoziente di TX |V con TV .
Cerchiamo di descrivere la relazione tra il fibrato conormale−NV|X e il fibratolineare associato all’ipersuperficie liscia V (e piu in generale ad un divisore diCartier).
Se l’ipersuperficie V e definita localmente da certe funzioni fa su un apertoUa, allora a V e associato un fibrato, che con abuso di linguaggio indicheremoancora con V, definito dalle funzioni di transizione
gab =fa
fb.
Mostriamo che −V e −NV|X hanno le stesse funzioni di transizione.Una sezione di −NV|X e data da d fa e, dal momento che V e liscia, avremo
che d fa non e ovunque nulla e inoltre abbiamo che fa = 0 su V ∩Ua.Su Ua ∩Ub ∩V abbiamo che
d fa = d(gab · fb) = fb · dgab + gab · d fb = gab · d fb.
Si ha pertanto che per il fibrato conormale le funzione di transizione per passareda Ub ad Ua sono le gab. Riassumendo, per un opportuno raffinamento del rico-primento aperto possiamo dire che il fibrato V ha funzioni di transizione da Ua aUb date da gab mentre per il fibrato conormale per passare da una sezione localesu Ua ed una su Ub e necessario moltiplicare per 1
gab.
Nella situazione precedentemente descritta,
−NV|X = −V|V.
Il risultato veramente importante e una uguaglianza che porta il nome di for-mula di aggiunzione e permette di descrivere il fibrato canonico di una ipersu-perficie V ⊂ X a partire dal canonico di X.
Teorema 2.9.1 (Formula di Aggiunzione). Data un’ipersuperficie V ⊂ X di unavarieta algebrica
KV = (KX + V)|V. (2.15)

2.9 Formule di Aggiunzione 33
Dimostrazione. Dala sequenza esatta
0 → TV → TX |V → NV|X → 0
otteniamo che TX |V = NV|X ⊗ TV ; considerando i duali e i determinanti abbiamoche KX |V = N−1
V|X ⊗ KV e quindi
KV = KX |V ⊗ NV|X = KX |V ⊗V|V.
Passando in notazione additiva otteniamo immediatamente che
KV = (KX + V)|V.
Grazie alla formula di aggiunzione possiamo immediatamente calcolare ilcanonico di un’ipersuperficie di CPn.
Esempio 2.9.2. Sia Y ⊂ CPn un’ipersuperficie di grado k, allora
HY = O(k− n− 1)|H.
Si ha infatti che Y e definita da un polinomio f di grado k e pertanto Y risulta, inqualche senso, equivalente a kH dove H e l’iperpiano (o meglio, la sua classe) diCPn. Abbiamo pertanto
KY = (KCPn + Y)|Y = (−(n + 1)H + kH)|Y = (k− n− 1)H|Y
da qui segue che HY = O(k− n− 1)|H.
Diamo ora un’altra applicazione della formula di aggiunzione: la formula delgenere.
Definizione 2.9.3. Sia C una curva proiettiva liscia diciamo genere di C l’intero nonnegativo g tale per cui
deg KC = 2g− 2.
Teorema 2.9.4 (Formula del Genere). Sia X = CP2 e C una curva algebrica liscia digrado d e genere g. Allora
g =(d− 1)(d− 2)
2.
Dimostrazione. Dal momento che KCPn = −3H e C = dH, indicata con P la classedi un punto, la formula di aggiunzione assicura che
KC = (−3H + dH)|dH = (d− 3)dP.

2.9 Formule di Aggiunzione 34
deve quindi risultare che
2g− 2 = (d− 3)d = d2 − 3d
da cui
g =d2 − 3d + 2
2=
(d− 1)(d− 2)2
.
Un ultimo esempio per chiudere questo capitolo e terminare gli strumenti dibase che ci permetteranno di iniziare a navigare in modo relativamente sicuronel mare delle varieta algebriche.
Esempio 2.9.5 (Fibrati su curve). Consideriamo ora una curva C di genere g; siaL un fibrato su C e s una sua sezione. Come gia visto, le altre sezioni di L sonodate da f · s dove f e razionale e Zeri(s) ⊂ Poli( f ). Allora grazie ad un notoTeorema di Riemann possiamo affermare che
dim Γ(C, L) > (numero zeri di s) + 1− g.

Capitolo 3
Lo studio delle varieta
Iniziare a studiare le varieta algebriche nella loro globalita e come iniziare ascalare una grande montagna; come ogni scalatore sa, per giungere alla vettae necessario essere ben equipaggiati e avere una strategia da seguire. Cerchiamoanche noi di lanciarci in un questa avventura con l’obiettivo di arrivare il piu inalto possibile. Considerato l’insieme delle varieta algebriche, abbiamo essenzial-mente due possibilita: da una parte possiamo chiederci quali sono le relazionitra diversi elementi, o meglio, in quale modo possiamo suddividere l’insieme inclassi di varieta aventi caratteristiche simili, dall’altra possiamo cercare di stu-diare piu in profondita particolari varieta. Davanti a questo bivio, scegliamo laprima strada.
Avendo deciso di tentare lo studio delle varieta nella loro globalita, il primoostacolo da affrontare sara quello di individuare una giusta relazione di equiv-alenza che ci permetta di suddividere l’insieme in tante classi. Quanto appenadetto e lo scopo della Classificazione Birazionale; la nostra relazione sara infatti,come meglio specificheremo, l’equivalenza birazionale e suddivideremo le va-rieta in classi di equivalenza birazionale. Lo scopo della Geometria Birazionale einvece lo studio delle relazioni che intercorrono tra le varieta di una stessa classedi equivalenza.
3.1 Strategia e strumenti
Nell’individuazione della strategia da seguire ci faremo guidare dai maestri del-la Scuola Italiana di Geometria Algebrica della prima meta del secolo scorso.Questo programma, che riprende pienamente le idee di Castelnuovo, Enriques eSeveri puo essere schematizzato in tre differenti passi.

3.1 Strategia e strumenti 36
1. definizione di una relazione di equivalenza;
2. trovare, in ciascuna classe, una singola varieta univocamente determinata;
3. utilizzare le proprieta della singola varieta individuata per studiare propri-eta comuni a tutte le varieta della classe.
Il Programma di Mori e, in un certo senso, una estensione di questi tre punti,un possibile programma di viaggio per cercare di arrivare alla vetta: definiremouna relazione di equivalenza e cercheremo di costruire un’algoritmo, il MinimalModel Program, che produce il modello minimale che sara, in un senso che megliospecificheremo, la varieta piu semplice all’interno della sua classe di equivalenza.
Definizione 3.1.1. Due varieta X e Y sono isomorfe se esistono funzioni regolari f :X → Y e g : Y → X tali che f g = id e g f = id.
Definizione 3.1.2. Una mappa f : X → Y e detta birazionale se esistono sottoinsiemipropri chiusi U ⊂ X e V ⊂ Y tali per cui
f : X −U → Y −V
e un isomorfismo.
La relazione di equivalenza naturale e quindi data dalla seguente definizione.
Definizione 3.1.3. Due varieta X e Y si dicono birazionalmente equivalenti se esisteuna mappa birazionale tra X e Y.
Una caratterizzazione interessante del concetto di equivalenza birazionale esicuramente data da questo celebre risultato.
Fatto 3.1.4. Due varieta sono birazionalmente equivalenti se e solo se i campi dellefunzioni razionali ad esse assiciati sono isomorfi.
Un primo problema e dato da questa domanda: e possibile individuare uninsieme di mappe birazionali elementari che permettono di produrre ogni al-tra mappa birazionale? Una classe di mappe naturalmente candidata a risol-vere questa domanda e l’insieme dei blow-up (scoppiamenti). A tal fine pareopportuno richiamare i fondamentali teoremi di Hironaka sulla eliminazionedelle indeterminazioni e risoluzione delle singolarita che gli hanno permesso diconquistare la Medaglia Fields nel 1970.
Teorema 3.1.5 (Eliminazione delle indeterminazioni). Sia X varieta proiettivaliscia e f : X 99K Y una mappa razionale, allora esiste una sequenza di blow-up lungosottovarieta liscie
gn : Xn → Xn−1 → · · · → X1 → X0 = X
per cui la composizione f gn e regolare.

3.1 Strategia e strumenti 37
L’idea e quindi che le mappe elementari potrebbero proprio essere blow-up (scoppiamenti) e blow-down (implosioni). Ai fini della classificazione bi-razionale l’altro grande risultato di Hironaka e il seguente Teorema.
Teorema 3.1.6 (Risoluzione delle Singolarita). Sia X una varieta proiettiva, alloraesiste una mappa birazionale f : X 99K Y dove Y e varieta proiettiva liscia.
Stiamo pertanto dicendo che e sempre possibile trovare in ciascuna classe diequivalenza birazionale una varieta liscia e quindi questa osservazione ci autor-izza a lavorare praticamente sempre con varieta liscie.
Vedremo che il Programma di Mori si discostera un poco da questo principiopermettendo alle varieta in gioco di avere particolari singolarita.
Accade che mappe birazionali tra varieta si comportano bene se messe inrelazione a sezioni di multipli del divisore canonico; e quindi possibile definireun importante invariante birazionale: il plurigenere.
Definizione 3.1.7. Il plurigenere m-esimo di X e
Pm(X) = dim Γ(X, mKX).
Abbiamo il seguente teorema.
Teorema 3.1.8. Sia f : X 99K Y mappa razionale tra varieta proiettive liscie di dimen-sione n; se f (X) non e contenuto in un chiuso proprio di Y risulta indotta l’iniezione
f ∗ : Γ(Y, mKY) → Γ(X, mKX)
e quindi se f e birazionale allora la f ∗ e un isomorfismo; in particolare Pm(X) = Pm(Y)per ogni m > 1: il plurigenere e quindi un invariante birazionale.
Abbiamo gia visto come ad un divisore e possibile associare una mappa ϕ :X 99K CP?; le mappe associate ai multipli del divisore canonico vengono dettemappe pluricanoniche; in particolare la mappa ϕm associata ad mKX e detta m-canonica.
La chiusura di ϕm(X) in CP? e detta immagine m-canonica e viene indicata conX[m]. Accade che se X e X′ sono varieta proiettive liscie birazionalmente equiv-alenti, allora X[m] e X′[m] sono isomorfe. Data una varieta X possiamo quindicostruire una successione di varieta X[1], X[2], . . . dipendente solo dalla classe diequivalenza birazionale di X. Ha senso chiedersi se, qualsiasi cosa voglia dire,questa successione ha limite.
Definizione 3.1.9. Se n ed m sono abbastanza grandi e sufficientemente divisibili, ac-cade che X[m] e X[n] sono birazionali; questa classe di equivalenza, con abuso di linguag-gio, viene detta varieta di Itaka e si indica con I(X); la mappa ϕ : X 99K I(X) e dettamappa canonica stabile.

3.1 Strategia e strumenti 38
Alla luce di quanto diremo negli ultimi capitoli sui risultati a proposito dellafinta generazione dell’anello canonico, anticiapiamo gia da ora che la varieta diItaka, definita come classe di equivalenza, non e altro che il modello canonicodella varieta X dato da Xcan = Proj X.
Esempio 3.1.10. Abbiamo calcolato che KCPn = O(−n − 1); avremo pertantoche mKCPn = O(−mn − m). Si ha quindi che mKCPn e sempre negativo e nonha sezioni globali; non abbiamo quindi la possibilita di costruire la mappa m-canonica e dunque per ogni m > 1 risulta Pm(CPn) = 0:
I(CPn) = ∅.
Esempio 3.1.11. Consideriamo ora una varieta prodotto X × Y; sappiamo che ildivisore canonico del prodotto e la somma dei pullback dei divisori canonici deifattori lungo le mappe di proiezione: KX×Y = p∗KX + q∗KY. Grazie a questofatto si puo dimostrare che Pm(X ×Y) = Pm(X) · Pm(Y) e pertanto
I(X ×Y) = I(X)× I(Y).
Esempio 3.1.12. Sia H una ipersuperficie liscia di CPn di grado d; abbiamocalcolato che KH = O(d− n− 1). Troviamo vari casi.
• d < n + 1; Pm(H) = 0 per ogni m;
• d = n + 1; KH = O e Pm(H) = 1;
• d > n + 1; O(m(d− n− 1)) ha sezioni ed esiste una formula per calcolarePm(H);
Esempio 3.1.13. Sia X varieta proiettia liscia con fibrato canonico ampio;abbiamo che un multiplo di KX definisce un embedding e quindi per m abbas-tanza grande si ha che X ∼= X[m]. In tal caso
X = I(X)
e abbiamo un modo unico di associare ad X una varieta. Si intravede l’importan-za di modelli con canonico ampio.
Uno strumento importante per lo studio delle varieta che abbiamo gia in-trodotto nei capitoli precedenti e la dimensione di Kodaira; la definizione datanel capitolo sui divisori e equivalente alla seguente.
Definizione 3.1.14. La dimensione di Kodaira κ(X) di una varieta X e la dimensionedella varieta di Itaka ad essa associata. Se inoltre I(X) = ∅ diciamo che κ(X) = −∞.
3.1 Strategia e strumenti 39
Osserviamo che la dimensione di Kodaira puo essere al piu uguale alla di-mensione di X e che permette di suddividere le varieta in base al valore diκ(X).
Il caso in cui κ(X) = −∞ e particolarmente interessante. Osserviamo innanz-itutto che dall’esempio 3.1.10 otteniamo che κ(CPn) = −∞. Accade inoltre checonsiderata una ipersuperficie H ⊂ CPn di grado k si possono presentare duecasi:
• se k < n + 1 per ogni punto di H c’e una curva razionale su H passante peril punto;
• se k > n + 1 per un punto generico non ci sono curve razionali.
Confrontando questo risultato con l’esempio 3.1.12 otteniamo che per una iper-superficie liscia H
κ(H) = −∞ se e solo se e coperta da curve razionali.
Fatto 3.1.15. Se X e coperta da curve razionali allora κ(X) = −∞.
Dimostrazione. L’ipotesi garantisce l’esistenza di una mappa razionale suriettivaY ×CP1 99K X. Calcolando il plurigenere otteniamo
Pm(X) 6 Pm(Y ×CP1) = Pm(Y) · 0 = 0.
Ci si puo chiedere se vale anche il viceversa: accade che se κ(X) = −∞ al-lora X e coperta da curve razionali? La risposta non e nota e sussiste ancora laseguente congettura.
Congettura 3.1.16. Una varieta algebrica con dimensione di Kodaira negativa e copertada curve razionali (unirigata).
Il tema delle curve razionali ci accompagnera lungo tutta la prima parte delProgramma di Mori che svilupperemo. L’idea che si puo intuire da quanto appe-na visto e che la presenza di curve razionali sulle varieta causa dei problemi: piucurve razionali ci sono e piu complicata sara la geometria birazionale della vari-eta. Il Programma di Mori ci fornira degli strumenti per individuare ed eliminarecerte curve razionali.
Il problema della classificazione birazionale e stato efficacemente risolto nelpassato per le curve e per le superficie, i lavori di Mori (ad esempio [Mor82]e [Mor88]) hanno fornito ai geometri algebrici nuovi strumenti per affrontare ilproblema della classificazione anche in dimensione alta. Nella prossima sezioneriassumiamo brevemente lo stato dell’arte per curve e superficie prima del 1982.

3.2 Le curve e le superficie 40
3.2 Le curve e le superficie
Il caso delle curve risulta essere particolarmente semplice; fin dal passato e notoche presa una curva e possibile costruirne la normalizzazione in modo da ot-terere una curva liscia univocamente associata alla curva di partenza; si ha quin-di che e in ogni classe di equivalenza birazionale c’e un’unica curva proiettiva li-scia e il modello minimale e proprio quell’unica curva liscia presente nella classebirazionale. La classificazione e fatta utilizzando essenzialmente il genere che,come noto, risulta essere un invariante birazionale. Si ha infatti che
g(X) =
0 se X ' P1
1 se X e una curva ellittica> 2 se X e di tipo generale
Possiamo quindi dire che un eventuale Minimal Model Program non ha alcuninteresse nel caso delle curve in quanto tutte le domande hanno gia trovatorisposta.
Qualcosa di piu interessante si puo dire a riguardo delle superficie.Nei capitoli precedenti abbiamo avuto modo di introdurre un certo concetto
di intersezione. L’idea di intersecare curve con divisori e stata una delle novitaconcettuali che ha permesso lo sviluppo del programma di Mori. Nel caso dellesuperficie questa intersezione era gia stata considerata, ma in dimensione 2 curve(o meglio, 1-cicli) e divisori ((n− 1)-cicli) hanno entrambi dimensione 1; per lun-go tempo ci si e occupati di intersecare curve con curve senza pensare che questaprocedura poteva essere interpretata come intersezione curve-divisori.
Supponiamo quindi di avere a disposizione un prodotto di intersezione tracurve; questa costruzione puo ovviamente essere recuperata dalla costruzionepiu generale proposta nel capitolo sui divisori, ma puo anche essere fatta diret-tamente come riportato nell’appendice sul Teorema di Riemann-Roch.
Rivolgiamo ora l’attenzione alla costruzione del blow-up. Ricordiamo cheuna curva (o un divisore) viene detta eccezionale rispetto ad una certa mappaf se viene contratta ad un punto dalla mappa f . Lo scoppiamento di un puntodel piano CP2 puo essere visto, in un certo senso, come la somma di due pezzi;ripetiamo la costruzione sottolineando le operazioni geometricamente significa-tive. Proiettivizzare C2 equivale a considerare CP2 = C ∪ L dove L e, la rettaall’infinito; sia ora
U+ = L ∪ (x, y) ∈ C2 tali che xx + yy > 1 ⊂ CPn,
l’unione della retta all’infinito e l’esterno della sfera di raggio 1, abbiamo che U+
e tutto CP2 tranne un disco complesso; il blow-up e dato da due copie di U+
attaccate lungo la sfera di raggio 1. Per far combaciare l’orientamento dobbiamo

3.2 Le curve e le superficie 41
pero imporre che la seconda copia di U+ abbia orientamento inverso rispetto allaprima. Indicato con CP2 il piano proiettivo complesso con orientamento inversosi ha che
BpC = CP2 # CP2
dove # e l’operazione topologica di somma connessa effettuata tagliando undisco e incollando i due addendi connessi lungo il bordo del disco tagliato.
Se con L indichiamo la classe della retta all’infinito di CP2 e con L l’analogain CP2 abbiamo che
L · L = 1L · L = −1.
Ecco un’altra utile immagine per intuire la forma dello scoppiamento. Con-sideriamo CP2; rimuovendone un punto P non otteniamo altro che un fibrato inrette sulla retta all’infinito L; ciascuna retta del fibrato e una retta affine in quan-to ottenuta da una retta proiettiva alla quale e stato tolto il punto P (vedi Figura3.1).
Figura 3.1: CP2 meno un punto e il fibrato O(1)
Dal momento che la retta all’infinito definisce una sezione globale abbiamoche CP2 meno un punto non e altro che O(1) e che considerando un’altra rettaL′ non passante per P si ha che L · L′ = 1.
D’altra parte lo scoppiamento del piano affine in un punto puo non e altroche un fibrato in rette affini sul divisore eccezionale E. Questo fibrato non hasezioni globali e risulta essere proprio OCP1(−1) costruito nell’Esempio 2.2.5.
Lo scoppiamento di CP2 in un punto e quindi l’incollamento di OCP1(1) eOCP1(−1) fatto in modo che sopra al punto P ci sia il divisore eccezionale Edentro OCP1(−1).
Dal punto di vista topologia accade che se S e una superficie algebrica lisciae x ∈ S, il blow-up BxS e dato dalla somma connessa di S e di CP2: ad S viene

3.2 Le curve e le superficie 42
tolto un intorno sferico di x e lo si sostituisce con una copia rovesciata di CP2
meno un disco in modo che sopra il punto x rimanga una copia di CP1 cioe ildivisore eccezionale E. Posto pertanto p : BxS → S il blow-up e E = p−1(x) si hache
E · E = −1.
Un particolare ruolo e rivestito nella teoria classica delle superficie dalle curvead autointersezione negativa.
Definizione 3.2.1. Una curva razionale liscia C su una superficie S e detta −1-curvase C · C = −1.
Il fenomeno delle curve ad autointersezione negativa e spiegato totalmentedal blow-up; fondamentale a tal fine e il seguente teorema
Teorema 3.2.2 (Teorema di Castelnuovo). Se C e una −1-curva su una superficieliscia S′, allora esiste un morfismo f : S′ → S dove S e una superficie liscia per cui S′ eil blow-up di S in un punto e il divisore eccezionale dello scoppiamento e dato da C.
Questo teorema ci assicura che tutte le −1-curve provengono da blow-up eche possono essere contratte ad un punto. Eseguire degli scoppiamenti ha quindil’effetto di aggiungere −1-curve alla varieta e, in qualche senso, di renderla piucomplicata. Nel passo 2 della nostra strategia abbiamo dichiarato l’intenzionedi individuare, in ciascuna classe di equivalenza birazionale, la varieta piu sem-plice; se scoppiare complica la varieta, per avvicinarci alla varieta piu semplicenon ci resta che andare nella direzione inversa.
Definizione 3.2.3 (Superficie Minimale). Una superficie liscia S e detta minimale(in senso classico) o classicamente minimale se e priva di −1curve.
Questa definizione ci permette immediatamente di completare il passo 2 dellastrategia.
Teorema 3.2.4 (Classical Minimal Model Program). Ogni superficie liscia S e bi-razionalmente equivalente ad una superficie classicamente minimale.
Dimostrazione. La dimostrazione e essenzialmente un vero e proprio algoritmo.Se infatti S non contiene −1-curve allora e minimale e abbiamo finito. Se invececontiene una−1-curva E, il Teorema di Castelnuovo ci assicura l’esistenza di unamappa f : S → T che contrae E. A questo punto possiamo sostiturire S con Te riapplicare il procedimento. La domanda che si deve porre e: quest’algoritmotermina? La risposta affermativa discende dal fatto che, indicato con ρ il numerodi Picard, si ha che ρ(T) = ρ(S)− 1; essendo ρ dimensione di uno spazio vettori-ale risulta essere un intero positivo; abbiamo quindi un indice numerico positivoche ad ogni passo decresce di una unita.

3.2 Le curve e le superficie 43
Alla luce di quanto visto, il teorema sull’eliminazione delle singolarita ci per-mette di caratterizzare ulteriormente le superficie minimali. Riportiamo ora al-cuni piccoli risultati parziali (per la dimostrazione vedi [Kol87]) che ci permet-teranno di dimostrare il teorema sulle indeterminazioni nel caso delle superficie;
Fatto 3.2.5. Se f : X → Y e una mappa razionale tra due superficie e C e una curva (di-visore) su Y definita come zeri di una funzione g, possiamo definire una curva (divisore)f ∗(C) su X
f ∗(C) = C′ + ∑ mjEj,
dove C′ e la trasformata propria di C, Ej sono curve eccezionali e gli mj sono dati dallamolteplicita di g f lungo Ej.
Fatto 3.2.6. Con le notazioni precedenti, se E e una curva eccezionale, allora
E · f ∗(C) = 0.
Corollario 3.2.7. Sia p : ByY → Y il blow-up di y ∈ Y e sia E il divisore eccezionale;risulta
1. KByY = p∗(KY) + E;
2. E · KByY = −1.
Idea di dimostrazione. Dimostriamo la (2) supponendo nota la (1). Calcoliamol’intersezione
E · KByY = E · (p∗(KY) + E) = E · p∗(KY) + E · E,
ma il primo addendo e nullo per il Fatto 3.2.6 e E · E = −1.
Teorema 3.2.8 (Eliminazione delle indeterminazioni). Sia X superficie proiettivaliscia, Z varieta proiettiva e sia f : X 99K Z una mappa razionale. Allora esiste unasequenza finita di blow-up
gn : Xn → Xn−1 → · · · → X0 = X
per cui f gn e regolare.
Dimostrazione. Consideriamo Z ⊂ CPn per un qualche n e sia Ht una famigliadi iperpiani di CPn; indichiamo con Γ il grafico di f dentro X × Z e con p e q leproiezioni di Γ, rispettivamente, su X e su Z. La f non sara definita su un insiemexi per i quali si ha che p−1(xi) e una curva e che anche q(p−1(xi)) e una curvain Z.

3.2 Le curve e le superficie 44
Poniamo Ct = p(Γ ∩ q−1(Ht), cioe Ct e la chiusura di f−1(Z ∩ Ht); d’altraparte sappiamo che un iperpiano Ht interseca le curve e quindi
Ht ∩ q(p−1(xi)) 6= ∅. (3.1)
Accade che xi ∈ Ct per ogni i, infatti xi ∈ p(Γ ∩ q−1(Ht) equivale a dire chep−1(xi) ∈ Γ e p−1(xi) ∈ q−1(Ht) e cioe f (xi) ∈ Ht; la (3.1) assicura Ct passa pertutti i xi. Se t e s sono sufficientemente generali abbiamo quindi che Ct ∩ Cs edata da un numero discreto di punti e
Ct · Ct = Ct · Cs > 0. (3.2)
Consideriamo ora p1 : X1 → X0 = X il blow-up di x1 e sia E il divisoreeccezionale. Se C1
t e la trasformata propria di Ct indotta dalla mappa f p :X1 → Z, abbiamo che
p∗(Ct) = C1t + mE e C1
t = p∗(Ct)−mE.
Indichiamo con m e la molteplicita del divisore eccezionale E e abbiamo m > 0poiche xi ∈ Ct.
Calcoliamo.
C1t · C1
t = (p∗(Ct)−mE) · (p∗(Ct)−mE)
= p∗Ct · p∗Ct − 2mp∗Ct · E + m2E · E
= Ct · Ct −m2.
Abbiamo pertanto che C1t · C1
t < Ct · Ct; ogni scoppiamento fa sı che il valore,che e positivo in virtu della (3.2), di Ci
t · Cit decresca ad ogni passo. Il processo
termina eliminando tutte le indeterminazioni.
Corollario 3.2.9. Se f : X 99K Z non e regolare allora Z contiene una curva razionale.
Dimostrazione. Utilizzando il teorema precedente, sia pn : Xn → Xn−1 l’ulti-mo scoppiamento necessario e sia E il suo divisore eccezionale. Osserviamo che( f pn)(E) non puo essere un punto poiche in tal caso avremmo che f pn−1
sarebbe gia regolare; si ha pertanto che ( f pn)(E) e una curva contenuta in Z ede razionale (birazionale a CP1) in quanto curva eccezionale di un blow-up.
Corollario 3.2.10. Sia f : X 99K Z una mappa birazionale tra superficie proiettiveliscie e sia KZ nef (cioe C · KZ > 0 per ogni C), allora f e regolare.
Dimostrazione. Supponiamo che f non sia regolare; il Teorema ci permette di ri-solvere le indeterminazioni. Consideriamo come nella dimostrazione del corol-lario precedente l’ultimo blow-up pn : Xn → Xn−1. L’immagine di E non puoessere un punto, ma dev’essere una curva e inoltre possiamo affermare che
E · KXn > f pn(E) · KZ. (3.3)

3.2 Le curve e le superficie 45
Infatti si ha che se ϕ : Xn → Z e la mappa in questione esiste un divisore effettivoM non contenuto in E per cui
ϕ∗KZ + M = KXn
da cui si verifica facilmente la (3.3).Inoltre il valore della (3.3) non e negativo in virtu dell’ipotesi di nefness di KZ;
abbiamo quindi un assurdo poiche E e curva eccezionale e E ·KXn = −1 < 0.
Quest’ultimo corollario ci permette di fare un’osservazione particolarmenteinteressante. Ogni classe di equivalenza birazionale di superficie puo contenereal piu un elemento con divisore canonico nef. L’idea e che muovendosi all’in-terno di una classe di equivalenza con mappe birazionali, si puo (o meglio, sivorra) arrivare ad una varieta tale per cui tutte le mappe birazionali che partonoda questa varieta sono in realta degli isomorfismi; la varieta cosı ottenuta vienead essere, in un certo senso, la varieta piu semplice, piu piccola della classe. Ilpasso cruciale fatto da Mori che ha dato inizio al suo Programma e stato quellodi cambiare il concetto di modello minimale.
Definizione 3.2.11 (Superficie Minimale: Aggiornamento). Diciamo che una su-perficie liscia S e minimale se il suo divisore canonico KS e nef.
Vediamo ora la relazione tra le due definizioni di superficie minimale cheabbiamo dato fin’ora.
Il Teorema di Castelnuovo assicura che le −1-curve provengono essenzial-mente da scoppiamenti e abbiamo visto che se E e il divisore eccezionale di uncerto scoppiamento risulta E ·KS = −1. Abbiamo quindi che se S e minimale sec-ondo questa nuova definizione allora lo e anche secondo quella classica. D’altraparte abbiamo il seguente risultato
Fatto 3.2.12. Se S e una superficie proiettiva liscia non rigata classicamente minimale(priva di −1-curve) allora KS e nef.
Dimostrazione. Supponiamo per assurdo che KS non sia nef; si ha allora che esisteuna curva B ⊂ S per cui B · KS < 0. Come vedremo successivamente (Bend& Break), in questa situazione e possibile dire che esiste una curva razionale Cper cui C · KS < 0. Dal momento che S non ha −1-curve possiamo dire cheC ·KS < −1. Se P e la classe di un punto (iperpiano in dimensione 1), utilizzandola formula di aggiunzione scriviamo che
KC = (KS + C) · C−2P = KS · C + C · CC · C = −2− KS · C

3.2 Le curve e le superficie 46
e siccome C ·KS < −1 dovremmo avere C ·C > 0 che e assurdo poiche da questaaffermazione si potrebbe provare, con opportune argomentazioni, la rigatezza diC.
Abbiamo quindi che, quantomeno per le superficie non rigate, le definizionidi classicamente minimale e minimale coincidono. Possiamo riassumere tutte leosservazioni fin’ora fatte con il seguente Teorema.
Teorema 3.2.13. Sia S una superficie proiettiva liscia. Esiste allora un morfismo
f : S → S′
dato come composizione di blow-down di−1-curve e una mappa di contrazione g : S′ →Z
S
f
S′ g// Z
tale che vale una delle seguenti.
1. dim Z = 2; g e birazionale e Z risulta essere una superficie liscia con KZ nef;
2. dim Z = 1; Z e una curva liscia e S′ e rigata su Z;
3. dim Z = 0; Z e un punto e S′ e isomorfa a CP2.
I casi elencati nel Teorema precedente rivestono particolare interesse se messiin relazione con la dimensione di Kodaira. Si ha infatti che il caso 1. corrispondeal caso in cui κ(X) > 0, mentre gli altri due si ottengono quando κ(X) e negativa.

Capitolo 4
Teoremi Fondamentali
Grazie al linguaggio, alle idee e alla teoria sviluppata e richiamata nei capitoliprecedenti siamo pronti per addentrarci nel Programma di Mori.
Ipotesi di lavoro. Dove non diversamente specificato lavoreremod’ora in poi con varieta normali.
Il Minimal Model Program non e altro che un tentativo di individuare una va-rieta minimale birazionalmente equivalente ad una varieta di partenza. Se ilMMP e una caccia, ecco la nostra preda:
Definizione. Una varieta X e detta minimale se il suo divisore canoni-co KX e minimale tra tutte le varieta birazionalmente equivalenti ad X; inparticolare questo accade se KX e nef.
L’idea di fondo del MMP e quella di individuare le curve KX-negative e di far-le scomparire dalla varieta (cioe contrarle) mediante mappe birazionali in mododa ottenere, se possibile, una varieta con divisore canonico nef.
4.1 Sulla rappresentazione grafica dei divisori
Prima di dedicarci allo studio dei teoremi utili per spiegare il funzionamento delMMP, spendiamo alcune parole su come e possibile rappresentare graficamentei divisori. Dove non diversamente specificato il nostro ambiente di lavoro sarala varieta X. Il prodotto di intersezione curve-divisori definito nei capitoli prece-denti ci permette di osservare che un divisore D determina un iperpiano nellospazio vettoriale reale N1(X)
C ∈ N1(X) tali che D · C = 0

4.1 Sulla rappresentazione grafica dei divisori 48
che divide lo spazio in una parte positiva e una parte negativa. Il criterio diKleiman e la definizione di divisore nef permettono di individuare tre casi inte-ressanti.
• Divisore qualsiasi. Il cono NE(X) sta sia nella parte positiva sia in quellanegativa (Figura 4.1).
• Divisore ampio. Il cono NE(X) sta tutto nella parte strettamente positivadeterminata dall’iperpiano associato al divisore D (Figura 4.2).
• Divisore nef. Il cono NE(X) sta nella parte positiva e tocca in qualchepunto l’iperpiano associato al divisore D (Figura 4.3).
Ecco come appare la situazione mostrando uno spazio N1(X) di dimensione3 attraverso una sezione con un piano non passante per l’origine.
Figura 4.1: Il cono NE(X) e un divisore qualsiasi
Figura 4.2: Il cono NE(X) e un divisore ampio

4.2 Bend & Break 49
Figura 4.3: Il cono NE(X) e un divisore nef
Se D e un divisore indichiamo con D < 0, D = 0 e D > 0 rispettivamente laparte negativa, nulla e positiva di N1 individuata da D; in particolare se D e nefallora D < 0 e l’insieme vuoto. Con le notazioni D > 0 o D 6 0 si intendono leovvie estensioni di quanto appena indicato. Le eventuali ambiguita di notazionecon i divisori effettivi risulteranno spesso chiare dal contesto.
4.2 Bend & Break
Nell’aricolo di Mori del 1982 ([Mor82]) viene dimostrato una prima versione diquello che verra poi chiamato il Teorema del Cono che dimostreremo, in formaun po’ piu generale, in uno dei capitoli successivi. Il divisore canonico sara unasorta di metro per misurare la positivita e la negativita delle curve; in quest’ot-tica, il Teorema del Cono si preoccupa essenzialmente di fornire una descrizionegeometrica della parte negativa rispetto al divisore KX del cono delle curve. Perdimostrare il suo Teorema del Cono nel caso delle varieta liscie, Mori mise a pun-to la tecnica del Bend & Break; l’idea di fondo e di investigare quando e possibiledeformare una curva (bend) fino a spaccarla in una somma di curve (break). An-ticipiamo fin da ora che uno degli aspetti interessanti e che per dimostrare affer-mazioni riguardanti campi in caratteristica 0 (tipicamente C) vengono utilizzatimetodi di caratteristica p. Il Teorema del Cono e delle contrazioni generale chedimostreremo piu tardi utilizzera delle tecniche completamente differenti, ma glistrumenti introdotti per risolvere il problema nel caso particolare delle varietaliscie permettono di avere un’utile intuizione geometrica.
Come gia osservato nel capitolo precedente, particolare interesse ha la pre-senza o meno di curve razionali sulla varieta data X. In particolare sappiamoche dato un morfismo birazionale f : Y → X le fibre dei punti su cui f non e iso-morfismo sono coperte da curve razionali e che se la mappa razionale g : Z 99K Xnon e regolare allora X contiene una curva razionale.

4.2 Bend & Break 50
Lemma 4.2.1 (Bend & Break I). Sia X una varieta propria, C una curva proiettiva lisciae p un punto della curva C. Sia g0 : C → X un morfismo non costante (cioe g0(C) e unacurva); se esiste una curva liscia connessa D con un punto fissato 0 ∈ D e un morfismo
G : C× D → X
tale che
1. G|C×0 = g0;
2. G(p × D) = g0(p);
3. G|C×t 6= g0 per un generico t ∈ D.
Allora esiste un morfismo g1 : C → X e una combinazione di curve razionali Zi ⊂ X
Z = ∑ aiZi con ai > 0
tali per cui
1. (g0)∗C e numericamente equivalente a (g1)∗C + Z;
2. g0(p) ∈ ⋃i Zi, cioe X contiene una curva razionale passante per g0(p).
L’idea e quindi di costruire una famiglia G di morfismi gt parametrizzata dauna curva D in modo che la mappa di partenza g0 venga deformata e l’immaginedi g1 si spezzi in curve di cui almeno una sia razionale. La idea di utilizzaremetodi di caratteristica positiva, come vedremo tra poco, nasce dalla necessita diavere mappe di grado alto.
Dimostrazione. Consideriamo la compattificazione D della curva D e la mapparazionale indotta G.
C× DG
""EE
EE
E
C× D
OO
G // X
Affermiamo che G non e definita in qualche punto di p × D. Se infatti per as-surdo fosse definita per qualsiasi p, considerato un intorno U di p, per la mappadi proiezione f : U × D → U avremmo che f−1(p) = punto, ma allora in virtudel Teorema di Rigidita (1.1.12) dovremmo avere f−1(q) = punto per ogni q ∈ Cil che e assurdo con la terza ipotesi.

4.2 Bend & Break 51
Se S e la normalizzazione del grafico di G, la situazione e descritta dal dia-gramma
Sπ
""EEE
EEEE
EE GS
h
##
C× DG//___
X
D
.
Dal momento che G non e ovunque definita in p × D esistono (p, d) ∈ C × Dper cui la proiezione π non e un isomorfismo e abbiamo pertanto che
h−1(d) = C′ + E
dove C′ e la trasformata birazionale di C × d ⊂ S ed E 6= 0 e un divisoreeccezionale per la mappa π. Chiamiamo ora g1 : C → X la mappa data dag1 = GS|C′ e sia Z = GS(E). Accade che g0 puo essere identificata con GS|h−1(0)e quindi (g0)∗(C) e numericamente equvalente a (g1)∗(C) + Z ed essendo E ec-cezionale anche Z e coperto da curve razionali. Abbiamo pertanto che esiste unacurva razionale passante per g0(p).
Lemma 4.2.2 (Bend & Break II). Sia X una varieta proiettiva e g0 : CP1 → X unmorfismo non costante. Se esiste una curva D con un punto 0D ∈ D tale che D sia lisciae connessa ed esiste un morfismo G : CP1 × D → X tale che
1. G|CP1×0D = g0;
2. G(0 × D) = g0(0) e G(∞ × D) = g0(∞);
3. G(CP1 × D) e una superficie.
Allora (g0)∗(CP1) e numericamente equivalente in X o ad una curva riducibile o ad unmultiplo di qualche curva.
Dimostrazione. Vedi [KM98]. L’idea di fondo e considerare una famiglia di curve(razionali) avente due punti fissati (g0(0) e g0(∞)) e deformare una curva dellafamiglia fino a romperla, da cui il suggestivo termine Bend & Break.

4.3 Primo Teorema Fondamentale 52
4.3 Primo Teorema Fondamentale
Il problema a questo punto e investigare l’esistenza o meno dei morfismi Gche possono essere interpretati come deformazioni delle curve all’interno dellavarieta X.
Enunciamo ora il primo teorema fondamentale per la teoria di Mori che cipermettera la descrizione del cono NE(X).
Teorema 4.3.1 (Teorema del Cono). X varieta proiettiva. Esiste una quantita numer-abile (eventualmente nulla) di curve razionali Γi ⊂ X tali che
−dim X − 1 < KX · Γi < 0
ed inoltreNE(X) = NE(X)KX>0 + ∑ Ri
dove Ri = R+Γi e un raggio estremale negativo e gli Ri sono localmente discreti nelsemispazio negativo KX < 0.
Il cono delle curve viene quindi ad avere una forma molto particolare: nullasappiamo della parte positiva rispetto a KX , ma la parte negativa risulta esserelocalmente poligonale e i raggi estremali si possono accumulare solamente sul-l’iperpiano KX = 0. Particolarmente utile e la rappresentazione grafica in Figura4.4.
Figura 4.4: Il Teorema del Cono
Come applicazione dei lemmi di Bend & Break, diamo una prima versione delTeorema del Cono dimostrandone solo una parte; la dimostrazione che presen-tiamo mette in particolare evidenza gli aspetti geometrici ed e utile per formareun’intuizione al problema generale. Per la dimostrazione completa (e piu gen-erale) del Teorema del Cono sara necessario sviluppare delle nuove tecniche cheverranno presentate nei capitoli successivi.

4.3 Primo Teorema Fondamentale 53
Teorema 4.3.2. Data una varieta proiettiva liscia X si ha che ogni raggio estremalenegativo e spazzato da una curva razionale D ⊂ X tale per cui
−dim X − 1 6 D · KX < 0.
Dimostrazione. Se NE(X)KX<0 e vuoto non abbiamo nulla da provare; nel caso incui ci sia una curva C e un morfismo f : C → X per cui f∗(C) · KX < 0, l’ideadi base consiste nel cercare di applicare i lemmi di Bend & Break e deformare ilmorfismo f : C → X fino a spezzare l’immagine in una catena di curve. Inparticolare siamo interessati a trovare una curva razionale passante per un datopunto x ∈ X, cioe a fissare un punto 0 ∈ C tale per cui f (0) = x ∈ X.
Eccoci di fronte al primo problema: data la mappa f : C → X, e semprepossibile deformarla? Se sı, con quanti gradi di liberta?
Grazie ad una forma del Teorema di Riemann-Roch, si ha che che lo spazio dideformazione di f ha dimensione maggiore o uguale a
− ( f∗(C) · KX) + (1− g(C)) dim X
dove con g(C) indichiamo il genere della curva C. Per quanto osservato, vogliamopero che la nostra curva passi per un certo punto fissato; fissare un punto si tra-duce nel dover aggiungere dim X condizioni al nostro spazio di deformazioneche verra ad avere dimensione maggiore o uguale a
−( f∗(C) · KX)− g(C) dim X. (4.1)
Ora accade che se il valore di (4.1) e positivo esiste una famiglia ad un parametrodi mappe di deformazione della f : C → X che lascia 0 fissato.
Secondo problema: e possibile fare in modo che −( f∗(C) · KX) + g(C) dim Xsia positivo?
A tal fine cerchiamo di mantenere fisso il valore di g(C) dim X e di far crescerequello di −( f∗(C) · KX). Consideriamo vari casi.
1. Caso g(C) = 0. In tal caso abbiamo che f∗C · KX < 0 per ipotesi e quindi la(4.1) e positiva e c’e una curva razionale passante per x.
2. Caso g(C) = 1. In questo caso C e una curva ellittica e possiamo quindiconsiderare la mappa data dalla moltiplicazione n : C → C che induce unricoprimento a n2 fogli; l’immagine di n e ancora C (e quindi in particolareil genere viene preservato), ma, in qualche senso, deve essere contata n2
volte. Considerando la composizione f n al posto della f si ottiene quindi
−(( f n)∗)(C) · KX)− 1 dim X = −n2( f∗(C) · KX)− dim X
che, per valori sufficientemente grandi di n risulta positivo.

4.3 Primo Teorema Fondamentale 54
3. Caso g(C) > 1. Siamo interessati ad eseguire un’operazione simile al pas-so precedente, tuttavia e cosa nota che una curva di genere g > 1 non haendomorfismi di grado > 1 e se cerchiamo ricoprimenti p : E → C accadeche studiando f p il genere della curva cambia e non abbiamo piu con-trollo sul segno della (4.1). Avremmo quindi bisogn di endomorfismi di Cdi grado alto, ma siamo davanti ad un muro. Che fare?
Per risolvere il problema prodotto dal caso g(C) > 1 non ci resta che scaval-care il muro davanti al quale siamo finiti e cambiare momentaneamente ambientedi lavoro. Se e vero che C non ha endomorfismi di grado alto quando si lavorasu C e altrettanto vero che la situazione e radicalmente diversa quando si lavorain caratteristica p.
Considerato l’insieme Fp degli interi modulo p primo, possiamo ripetere levarie costruzioni ed introdurre lo spazio affine Fn
p, il proiettivo FpPn e le sot-tovarieta algebriche. Per ovviare alla mancanza di soluzioni delle equazionipolinomiali e bene considerare la chiusura algebrica Fp e lo spazio FpPn. Ledefinizioni di base sono le stesse, ma si manifestano alcuni fenomeni differenticome ad esempio il fatto che in Fp si ha (x + y)p = xp + yp.
La mappa di Fp Frobenius
Fp : (x0 : . . . : xn) 7→ (xp0 : . . . : xp
n)
sara l’endomorfismo di grado alto di cui abbiamo bisogno.Consideriamo una curva C di equazioni ci(y0 : . . . ym) su una varieta liscia X
di equazioni hj(x0 : . . . xn) e supponiamo che sia le ci sia le hj abbiano coefficientiinteri, riducendo modulo p tutti i coefficienti produciamo le varieta Xp di FpPn eCp di FpPm. Ora accade che queste varieta sono anch’esse lisce e dim Cp = 1 perquasi ogni primo p. La mappa di Frobenius Fm
p : Cp → Cp e un endomorfismo digrado p e la composizione
CpFm
p→ Cpfp→ Xp,
ha uno spazio di deformazione associato di dimensione maggiore o uguale a
−pm(( fp)∗(Cp) · KXp)− g(Cp) dim Xp. (4.2)
Dal momento che (( fp)∗(Cp) · KXp) e negativo ed indipendente da p si ha che ilvalore di (4.2) e positivo per m sufficientemente grande.
Grazie a questa costruzione riusciamo a produrre una curva razionale Ap suXp per quasi tutti i primi p.
Occupiamoci ora di dimostrare la disuguaglianza dell’enunciato del teorema.Se la curva Ap trovata e tale che KXp · Ap < −dim Xp − 1 allora osserviamo cheil morfismo Ap → Xp puo essere deformato mantenendo due punti fissati con

4.4 Secondo Teorema Fondamentale 55
una famiglia a due parametri. Ma siccome in P1 le famiglie di automorfismi chefissano due punti hanno dimensione 1, l’immagine di Ap non puo essere fissata.In breve, si ha che le ipotesi del secondo Lemma di Bend & Break sono soddisfattee risciamo a spezzare la curva Ap in curve di grado inferiore fino ad ottenere unaBp per cui Bp · KXp > −dim Xp − 1.
La conclusione della dimostrazione si ottiene dal fatto che abbiamo provatol’esistenza di curve razionali di intersezione limitata in caratteristica p per quasiogni p. Vale infatti il seguente Fatto.
Fatto 4.3.3. Se un sistema di equazioni omogenee a coefficienti interi ha soluzioni nonbanali in Fp per una quantita infinita di primi p allora il sistema ha soluzioni non banalianche in ogni altro campo algebricamente chiuso e quindi, in particolare, su C.
Dimostrazione del Fatto. Dalla teoria dell’eliminazione, utilizzando i risultanti, siha che l’esistenza di soluzioni di sistemi di equazioni omogenee e data dall’an-nullarsi di certi determinanti costruiti utilizzando i coefficienti dei polinomi inquestione. E noto che se un determinante si annulla modulo p per infiniti pallora si annulla anche in caratteristica 0.
A partire dalla curva razionale Bp data da certe equazioni omogenee in Fp
si trovano certe equazioni in su C che permettono di individuare un’opportunacurva razionale.
Riassumendo, si ha che data una curva KX-negativa, troviamo una curvarazionale negativa passante per un certo punto prefissato x ∈ X.
Abbiamo immediatamente il seguente Corollario.
Corollario 4.3.4. Se X e una varieta proiettiva liscia con fibrato anticanonico ampio(varieta di Fano) allora e coperta da curve razionali.
Dimostrazione. Fissato un punto d ∈ X scegliamo una curva D passante per d.Dal momento che −KX e ampio D e KX-negativa e quindi il teorema precedentepermette di produrre una curva razionale passante per d.
4.4 Secondo Teorema Fondamentale
Nella sezione precedente siamo riusciti a dare una descrizione dei raggi estremalie il Teorema del Cono ci da informazioni sulla posizione di quelli negativi. Perprocedere nel Minimal Model Program cerchiamo di contrarre questi raggi es-tremali.
Ricordiamo innanzitutto la seguente definizione.

4.4 Secondo Teorema Fondamentale 56
Definizione 4.4.1 (Contrazione di un raggio estremale). Sia R un raggio estremaledi NE(X) per una varieta proiettiva X. Una contrazione f : X → Z e una contrazionedi R se, data una curva C,
f (C) = punto ⇐⇒ [C] ∈ R.
La classificazione delle tipologie di contrazioni per varieta di dimensione mi-nore o uguale a 3 e un’altro risultato fondamentale ottenuto da Mori. Per quantoriguarda il caso di dim = 2 Mori non dimostro nulla di originale, ma i metodiutilizzati permettono di avere un approccio simile anche in dimensione alta.
Vediamo quindi come i risultati di Mori si realizzano nel caso delle superficie.
Teorema 4.4.2 (Classificazione delle contrazioni in dim X = 2). Sia X una su-perficie proiettiva liscia e C una curva razionale su X che genera un raggio estremalenegativo. Questo raggio puo essere contratto e si presenta uno dei seguenti casi
1. C · KX = −3. La mappa di contrazione e f : X → P dove P e un punto; C ⊂ X euna retta e X = CP2.
2. C ·KX = −2. La mappa di contrazione e f : X → E dove E e una curva proiettivaliscia, le fibre di f sono isomorfe a CP1 e C e una di queste fibre.
3. C · KX = −1. La mappa di contrazione e f : X → Y dove Y e una qualchesuperficie liscia, X = ByY per qualche y ∈ Y e C e il divisore eccezionale delloscoppiamento f .
L’applicazione della procedura suggerita dal Teorema (contrarre raggi es-tremali) produce immediatamente il seguente risultato.
Corollario 4.4.3. Se X e una superficie proiettiva liscia allora esiste una superficie Yottenuta da X mediante una sequenza di blow-up di punti tale per cui vale una delleseguenti.
1. Y e birazionale a CP2.
2. C’e una mappa suriettiva da Y su una curva E con fibre birazionali a CP1.
3. KY e nef.
Dimostrazione. Se KX e nef poniamo Y := X e siamo nel caso 3..Se KX non e nef troviamo una curva C KX-negativa che genera un raggio es-
tremale negativo; contraiamo il raggio e ci troviamo in uno dei casi descritti nelTeorema 4.4.2. Nel caso 1. del Teorema poniamo Y := X, siamo nel caso 1. delCorollario e abbiamo concluso. Nel caso 2. del Teorema poniamo Y := X, siamonel caso 2. del Corollario e abbiamo concluso. Nel caso 3. del Teorema abbiamo

4.4 Secondo Teorema Fondamentale 57
X = BX1 dove X1 e una superfice e possiamo quindi ripetere la proceura appli-cata a X1. Ogni volta che contraiamo una curva il numero di Picard scende diuna unita e quindi la procedura termina al piu dopo dim H2(X, R) passi.
Corollario 4.4.4. Se X e una superficie liscia allora abbiamo due casi:
1. X e birazionale a E×CP1 in modo unico dove E e una curva e quindi X e copertada curve razionali e vale Pm(X) = 0 per ogni m > 1;
2. La classe di equivalenza birazionale di X contiene un’unica varieta Xmin tale percui KXmin e nef.
Il risultato originale i Mori rigarda la classificazione delle contrazioni nel casodelle threefolds e sara utile per introdurre il tema delle singolarita.
Teorema 4.4.5 (Classificazione delle contrazioni in dim X = 3). Sia X una varietaproiettiva liscia di dimensione 3; C ⊂ X una curva razionale che genera un raggio es-tremale negativo. Allora C puo essere contratta e, indicata con f : X → Z la contrazione,si ha uno dei seguenti casi.
1. Z e un punto e X e coperta da curve razionali.
2. Z e una curva liscia e anche in questo caso X e coperta da curve razionali.
3. Z e una superficie liscia e le fibre sono coniche in CP2.
4. La mappa f e l’inversa di un blow-up di Z di uno di questi tipi
A. Z e liscia, E e una curva liscia su Z e X = BEZ;
B. Z e liscia, z e un punto su Z e X = BzZ;
C. Z ha un punto singolare z nella forma analitica di
(x2 + y2 + z2 + u2 = 0) ⊂ C4
e X = BzZ;
D. Z ha un punto singolare z nella forma analitica di
(x2 + y2 + z2 + u3 = 0) ⊂ C4
e X = BzZ;
E. Z ha un punto singolare z del tipo
C3/(x, y, z) ∼ (−x,−y,−z)
e X = BzZ;

4.5 Un mondo singolare 58
Osserviamo quindi che ci sono chiare ragioni geometriche che impedisconoad una varieta X di avere KX nef. Essenzialmente problemi vengono prodottidalla presenza su X di curve razionali: o le curve razionali che generano raggiestremali coprono tutta quanta la varieta o le curve razionali coprono sottovarietaproprie che non possono essere contratte.
Il caso delle threefold porta a scontrarsi contro una difficolta: nel Teorema4.4.5 pur partendo da varieta liscie e possibile produrre varieta Z che presen-tano delle singolarita. La soluzione sara quindi chiudere un occhio e permet-tere che certe singolarita compaiano. Capire quali singolarita accettare e investi-gare le novita presenti un questo mondo singolare saro l’obiettivo della prossimasezione.
4.5 Un mondo singolare
Come appena osservato, dobbiamo arrenderci ad abbandonare il mondo liscioche Hironaka ci aveva concesso e addentrarci in un mondo in cui le singolaritasvolgono un ruolo fondamentale. Il problema ora e individuare una classe disingolarita che permetta i fenomeni descritti nel punto 4. del Teorema 4.4.5.
Una prima necessita che abbiamo e data dal poter definire un prodotto di in-tersezione curva-divisore canonico. Sappiamo che nel caso di varieta normali KX
puo essere definito in modo univoco anche se la varieta X ha dei punti singo-lari (se dim Sing(X) 6 dim X − 2); questa osservazione permette di risolvere ilproblema della singolarita dei casi 4.C. e 4.D. del Teorema 4.4.5, ma non risolvela singolaita del caso 4.E.
Nel caso 4.E. abbiamo a che fare con singolarita generate da certi quozienti; ilseguente risultato sara utile per capire cosa accade in questi casi.
Lemma 4.5.1. Sia U una varieta algebrica per cui KU esiste e sia G un gruppo di ordineg che agisce sulla varieta U. Indichiamo con V il quoziente U/G e sia S′ il luogo deipunti di U fissati da almeno un elemento di G. Se
dim S′ 6 dim U − 2
allora esiste un fibrato lineare L su V tale per cui
L|V − SingV ' gKV−SingV ,
cioe non e detto che esista KV , ma sicuramente esiste gKV .
Dimostrazione. Sia la mappa quoziente p : U → V = U/G e sia S = p(S′);considerata la restrizione p : U − S′ → V − S abbiamo che p e localmente un

4.5 Un mondo singolare 59
isomorfismo analitico e un elemento v ∈ V − S ha esattamente g controimmag-ini u1, . . . , ug. Si ha inoltre che KV−S esiste, ma qual’e la relazione tra KU el’eventuale KV?
Consideriamo v = p(u) e siano Ku e Kv le spighe rispettivamente di KU soprau e KV sopra v. La situazione e descritta dal seguente diagramma
Ku
⊂ KU
KV
⊃ Kv
p∗
u ∈ Up // V 3 v
e la mappa p∗ risulta essere un isomorfismo. Se il fibrato L esiste allora devequindi essere unico. Proviamo l’esistenza locale.
Supponiamo che KU abbia una sezione non nulla f : U → KU ; se v ∈ V − S ep−1(v) = u1, . . . , ug allora f (ui) ∈ Kui e puo essere, grazie a quanto osservatosulla p∗, identificato con un elemento di Kv. Si ha pertanto che la f produceuna funzione a g valori che e una sezione mai nulla di KV−S che puo essere lettacome sezione di gKV−S. Per ragioni legate alla normalita delle varieta le sezionidi gKV−S si estendono a sezioni di gKV .
Il lemma precedente garantisce che se X e una varieta normale e S e il suoluogo singolare allora se K e il divisore canonico su X − S, C una curva ed L unfibrato lineare per cui L|X−S ' mK, allora definiamo l’intersezione
C · K =1m
C · L.
Grazie a quanto appena detto risolviamo il problema di definire l’intersezioneanche nel caso 4.E. del Teorema 4.4.5.
Un secondo aspetto che vorremmo preservare nel passaggio dal mondo liscioal mondo singolare e il fatto che plurigenere e mappe canoniche sono oggettibirazionalmente invarianti. A tal fine aggiorniamo innanzitutto la definizione diplurigenere.
Definizione 4.5.2. Sia L fibrato lineare su una varieta X avente luogo singolare S. SeX e normale sappiamo che
Γ(X, L) ' Γ(X − S, L|X−S).
Definiamo quindi l’m-esimo plurigenere della varieta X
Pm(X) = dim Γ(X − S, mKX−S).

4.6 L’algoritmo del Minimal Model Program 60
Ancora una definizione.
Definizione 4.5.3. Sia X varieta proiettiva e x ∈ X. Diciamo che x non influisce ilplurigenere se per ogni mappa birazionale regolare f : Y → X con Y liscia e per ogniintorno U di x la mappa
Γ( f−1(U), mK f−1(U)) → Γ( f−1(U ∩ B), mK f−1(U∩B)) ' Γ(U − B, mKU−B)
e un isomorfismo per ogni m > 1, dove B e l’insieme in cui f−1 non e definita.
La mappa considerata non e altro che la naturale restrizione delle sezioni diun certo fibrato; la definizione chiede quindi che ci sia un solo modo per tornareindietro ed estendere una sezione.
Accade infatti che fuori da B si ha U − B ' f−1(U − B); se quindi considerouna sezione s di mKU−B riesco a produrre una sezione s di mK f−1(U−B). Questasezione s si estende ad una sezione razionale f ∗s di mK f−1(U) e la definizionechiede che questa sezione sia regolare.
La seguente definizione, dovuta a Miles Reid ci avvicina al nostro obiettivo.
Definizione (Singolarita Canoniche). Una singolarita x e detta canon-ica se mKX esiste per qualche m e x non influisce il plurigenere.
Accade tuttavia che la classe delle singolarita canoniche e troppo grande perfar funzionare il Minimal Model Program; la classe cercata sara la classe dellesingolarita terminali.
Definizione (Singolarita Terminali). Nella situazione precedentementedescritta, diciamo che x ∈ X e una singolarita terminale se mKX esisteper qualche m e se per ogni sezione s di Γ(U − B, mKU−B) si ha che f ∗se una sezione regolare di mK f−1(U) e si annulla su tutte le componenti didimensione (dim X − 1) di f−1(B).
Fatto 4.5.4. Come vedremo nei capitoli successivi, accade che un punto liscio e unasingolarita terminale.
Fatto 4.5.5. Non tutte le singolarita canoniche sono terminali: la classe delle singolaritaterminali e piu ristretta di quella delle singolarita canoniche.
4.6 L’algoritmo del Minimal Model Program
Siamo quindi pronti a completare l’elenco delle definizioni, a dare un aggiorna-mento della definizione di modello minimale e a rienunciare i teoremi fonda-mentali in questo contesto un po’ piu generale.

4.6 L’algoritmo del Minimal Model Program 61
Definizione 4.6.1. Una varieta X e detta varieta di Fano se ha fibrato anticanonicoampio. Equivalentemente se KX · C < 0 per ogni 0 6= C ∈ NE(X).
Definizione (Varieta minimale). Una varieta X e detta minimale se eQ-fattoriale, ha singolarita terminali e divisore canonico nef.
Teorema 4.6.2 (Primo Teorema Fondamentale). Sia X una varieta proiettiva consingolarita canoniche, allora la parte negativa del cono NE(X) e localmente finitamentegenerata e ogni sottocono estremale negativo puo essere contratto.
Teorema 4.6.3 (Secondo Teorema Fondamentale). Sia X una varieta Q-fattorialecon singolarita terminali e sia f : X → Y una contrazione di un raggio estremale. Cisono tre casi possibili.
1. Contrazione di Mori. Si ha che dim Y < dim X, X e coperto da curve razionalie X e anche detta fibrazione di Fano in quanto le fibre sono varieta di Fano.
2. Contrazione divisoriale. Si ha che dim Y = dim X, la f e una mappa bi-razionale e c’e una sottovarieta E di X tale per cui dim E = dim X − 1 (E e undivisore) che viene contratta, cioe per cui dim f (E) < dim E. La varieta Y eancora Q-fattoriale con singolarita terminali.
3. Contrazione piccola. Si ha che dim Y = dim X, la f e una mappa birazionale ec’e una sottovarieta E ⊂ X con dim E 6 dim X − 2 e f : X − E → Y − f (E) eun isomorfismo. In questo caso accade che mKY non esiste come divisore di Cartier.
Grazie a questi risultati siamo pronti a costruire una vera e propria procedura.Ecco l’idea. Se la varieta X e nef, allora abbiamo terminato e abbiamo trovato unmodello minimale; in caso contrario il Primo Teorema Fondamentale ci assicuradell’esistenza di un raggio estremale negativo contraibile.
Se si presenta il Caso 1. del Teorema 4.6.3 allora il MMP non ci dice piu nulla,accade che X non ha modello minimale, ma il problema e spostato a studiarevarieta di dimensione inferiore e quindi, se pensiamo di lavorare induttivamentesulla dimensione, e una situazione soddisfacente.
Nel Caso 2. accade che la nuova varieta contratta Y soddisfa tutte le ipote-si che permettono di applicare i Teoremi Fondamentali e quindi il processo puoessere interamente riapplicato a Y. Ogni contrazione divisoriale ha l’effetto didiminuire il numero di Picard e quindi si ha che non puo presentarsi una se-quenza infinita di contrazioni divisoriali.
Il Caso 3. presenta invece problemi maggiori come ad esempio il fatto cheKY non e un divisore Q-Cartier (cioe nessun suo multiplo e di Cartier) il cheimpedisce la partenza della nostra procedura. Che fare quindi nel caso dellecontrazioni piccole? La risposta a questa domanda sara l’introduzione di una
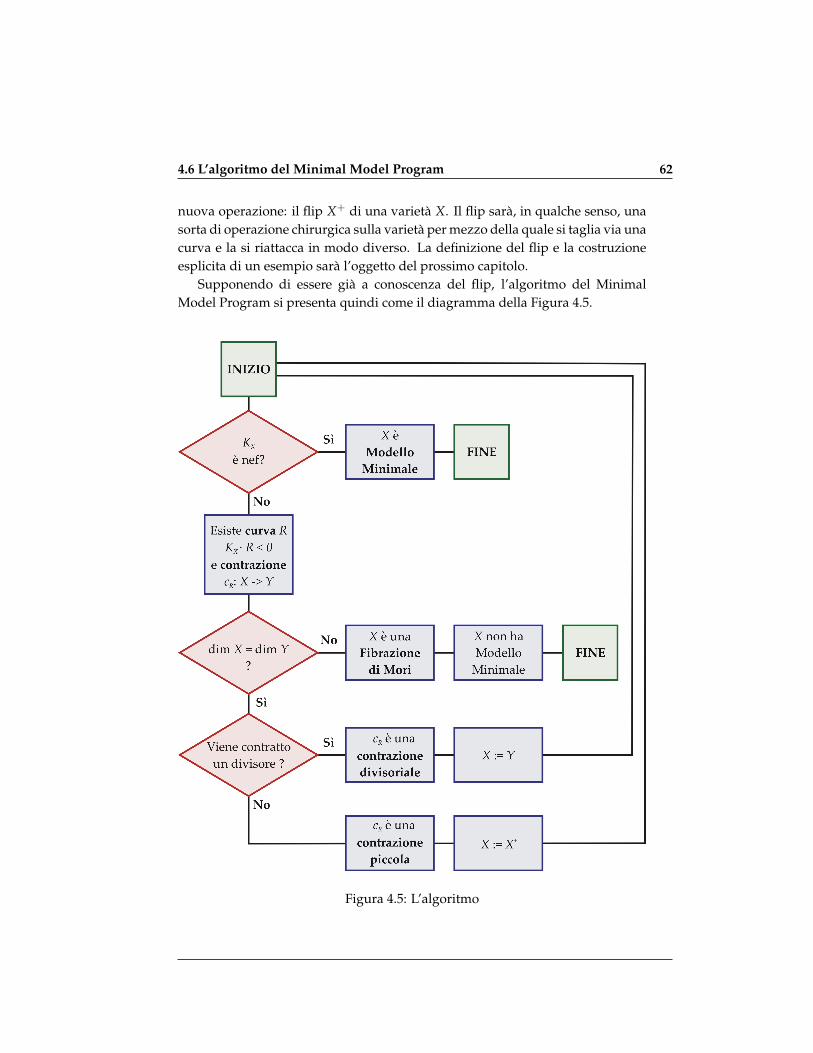
4.6 L’algoritmo del Minimal Model Program 62
nuova operazione: il flip X+ di una varieta X. Il flip sara, in qualche senso, unasorta di operazione chirurgica sulla varieta per mezzo della quale si taglia via unacurva e la si riattacca in modo diverso. La definizione del flip e la costruzioneesplicita di un esempio sara l’oggetto del prossimo capitolo.
Supponendo di essere gia a conoscenza del flip, l’algoritmo del MinimalModel Program si presenta quindi come il diagramma della Figura 4.5.
Figura 4.5: L’algoritmo

Capitolo 5
Flip e Flop
Come abbiamo avuto modo di vedere, il Programma di Mori costruisce delle con-trazioni che possono essere di tre tipologie: contrazioni di Fano, contrazioni di-visoriali e contrazioni piccole. Nei primi due casi sappiamo come andare avanti,ma per il caso delle contrazioni piccole abbiamo bisogno di costruire qualcosa dinuovo. In questo Capitolo ci occupiamo di definire il concetto di flip, di individ-uare le principali problematiche con le quali si ha a che fare in questa situazionee di costruire esplicitamente un esempio di flip.
Prima di arrivare alla definizione di flip, facciamo del lavoro preliminare.
5.1 Un’utile costruzione
Sia Q la superficie quadrica di equazioni
xy− uv = 0 (5.1)
in CP3 che sappiamo essere isomorfa a CP1 ×CP1; le due famiglie di rette sonodate da
(a)
x = λuv = λy
e (b)
x = λvu = λy
(5.2)
Sia ora C0 il cono sopra Q in C4 dato dall’equazione (5.1) e sia C la chiusuradi C0 in CP4. La quadrica Q dalla quale siamo partiti puo essere vista comel’intersezione di C con l’iperpiano all’infinito H di CP4. Accade che il verticedel cono, che coincide con l’origine di CP4, e un punto singolare che puo essererisolto in differenti modi; possiamo infatti scoppiare l’origine del cono oppurescoppiare un piano associato ad una retta della famiglia (a) oppure scoppiare unpiano associato alla famiglia (b).

5.1 Un’utile costruzione 64
Consideriamo il blow-up B0CP4 di CP4 nell’origine e sia C12 la chiusura diC − 0 dentro B0CP4. Nel blow-up di CP4 abbiamo sostituito l’origine con unacopia F di CP3; sappiamo tuttavia che C e l’unione delle rette che collegano l’o-rigine 0 a Q ⊂ H, pertanto il luogo eccezionale di B0C e dato da E = F ∩ C12.Accade che ad ogni punto di Q e univocamente associata una retta del cono Ce a questa, nello scoppiamento, un punto nel luogo eccezionale E; si ha quindiche E ∼= Q. La singolarita viene quindi risolta e C12 e, come si puo verificaremediante equazioni locali, una varieta liscia.
Concentriamoci ora sulle due famiglie di rette su Q; a ciascuna retta cor-risponde il piano dentro C individuato dalla retta e dal vertice del cono. Sianoquindi due famiglie di piani:
P1λ :
x = λuv = λy
e P2λ :
x = λvu = λy
(5.3)
Consideriamo Piλ − 0 e sia Pi
λ la sua chiusura in C12 data dal blow-up di un puntodel piano
Piλ = B0Pi
λ.
Ciascuno dei Piλ avra la sua curva eccezionale che, per costruzione, dovra stare
dentro E. Tuttavia sappiamo che E ' Q ' CP1 ×CP1 e quindi i Piλ producono,
al variare di i = 1, 2, due famiglie di rette in E. Osserviamo che se fissiamo ie facciamo variare λ, dal momento che C e coperto da Pi
λ, C12 risulta coperto
dalla famiglia di piani disgiunti Piλ. Dal momento che E ∩ Pi
λ e una curvaeccezionale, puo essere contratta e mappata in Pi
λ; iterando questa costruzioneper tutti gli elementi della famiglia costruiamo la mappa
qi : C12 → Ci =⊔
Piλ, i = 1, 2. (5.4)
Dove con il simbolo⊔
indichiamo l’unione disgiunta. La varieta Ci cosı costruitanon e altro che la varieta ottenuta da C scoppiando uno dei piani Pi
λ.La situazione e descritta dalla Figura 5.1Osserviamo che il divisore eccezionale E ⊂ C12 viene contratto dalle qi in una
retta, qi(E) = Ei; inoltre Piλ ∩ E viene mandato in un punto. Abbiamo pertanto
che Piλ ⊂ Ci e tale per cui Ei · Pi
λ = 1. Consideriamo l’altro indice e cerchiamo
di calcolare Ei ∪ qi(Pjλ). Sappiamo che Pi
λ ∪ E e una retta che viene mandata su
Ei dalla qi; abbiamo quindi Ei ⊂ qi(Pjλ). Osserviamo che Pj
λ e disgiunto da Pjµ
per λ 6= µ ed inoltre qi(Pjλ) ∩ Pj
µ ⊂ Ei; le eventuali intersezioni staranno quindi
in Ei. Muoviamo, qualsiasi cosa voglia dire, un poco Ei all’interno di qi(Pjµ) e
intersechiamo con qi(Pjλ). Le intersezioni sanno in qi(Pi
λ) ∩ qi(Pjµ), ma anche in

5.1 Un’utile costruzione 65
Figura 5.1: La risoluzione di (xy− uv = 0)
Ei, quindi calcolare Ei · qi(Pjλ) equivale ad autointersecare Ei dentro qi(Pj
µ), ma
Pjµ e il blow-up nell’origine di Pj
µ e quindi
Ei · qi(Pjλ) = Ei · Ei = −1.
Riassumendo abbiamo quindi che
Ei · Piλ = 1 e Ei · qi(Pj
λ) = −1. (5.5)
Diamo una descrizione della varieta C12. C12 e stata costruita a partire dalcono sulla quadrica Q sostituendo l’origine con una copia E di Q ' P1 × P1;abbiamo pertanto che C12 sara qualcosa di molto simile a P1 × P1 × P1 e cheH4(C12, R) abbia tre generatori, due provenienti in qualche modo dalla base Q

5.2 Definizione e problema di esistenza 66
e uno dalla fibra data dallo scoppiamento. Accade infatti che H4(C12, R) e gen-erato dalla classe di E, dalla classe di P1
λ e da quella di P2λ. Dal momento che
E viene contratta dalle mappe C12 → Ci, la classe di E viene mandata a ze-ro e risulta che H4(Ci, R) e generato dalla classe di Pi e da quella di Pj
λ. Ab-biamo inoltre che p−1
2 p1 da un isomorfismo tra C1 − E1 e C2 − E2 e quindiH4(C1 − E1, R) ' H4(C2 − E2, R), ma dal momento che la dimensione reale diEi e due, grazie ai noti teoremi di topologia algebrica, abbiamo l’isomofismo
t : H4(C1, R) '−→ H4(C2, R)
che manda la classe di P1λ in quella di q2P1
λ e la classe di q1P2λ in quella di P2
λ. Gra-zie alle relazioni (5.5) sui generatori trovate, abbiamo che per ogni A ∈ H4(C1, R)risulta
E1 · A = −E2 · t(A). (5.6)
Abbiamo quindi che C2 puo essere ottenuta da C1 con un’operazione chirurgica:si elimina da C1 la curva E1 ' CP1 e la si rimpiazza con la curva E2 ' CP1
attaccata in modo che valga la (5.6).
5.2 Definizione e problema di esistenza
Consideriamo ora due varieta X e X′ che possiamo momentaneamente supporreliscie ma che, per poter essere utilizzate dal Programma di Mori potranno avereal piu singolarita terminali. Applicando un procedimento simile alla costruzioneappena effettuata, accade che e possibile trovare delle mappe f : X → Z eF′ : X′ → Z e sottovarieta E ⊂ X e E′ ⊂ X′ isomorfe a CP1 tali che f ed f ′
contraggono rispettivamente E ed E′ ad un punto per cui
E · KX = µE′ · KX′ , per qualche µ > 0. (5.7)
In qualche senso, nel passaggio da X ad Y, la valutazione delle curve fatta medi-ante l’intersezione con il canonico cambia di segno.
Consideriamo l’operazione che produce (X′, E′) da (X, E). Distinguiamo trecasi:
1. se E · KX = 0 allora anche E′ · KX′ = 0 e l’operazione e detta flop di E ⊂ X;
2. se E · KX < 0 allora E′ · KX′ > e l’operazione e detta flip di (X, E);
3. se E · KX > 0 allora E′ · KX′ < 0 e l’operazione e detta antiflip di (X, E).
Fatto 5.2.1. Data una coppia (X, E), il flip e l’antiflip, se esistono, sono unici, se inoltreX e Q-fattoriale, anche il flop e unico.

5.2 Definizione e problema di esistenza 67
E interessante chiedersi come si comportano queste operazioni sulle singola-rita delle varieta che intervengono. Il flip, in qualche senso, migliora le singolar-ita; si ha infatti che se E e una curva negativa il flip la rende positiva e quindi fain modo, qualsiasi cosa voglia dire, che il canonico KX′ si avvicini ad essere nef.L’antiflip, per quanto appena detto, produce singolarita piu complicate. Il flopessenzialmente non modifica la singolarita.
Abbiamo un importate risultato di Reid che permette di concludere per l’e-sistenza di un flop.
Teorema 5.2.2 (Esistenza del flop). Sia X una varieta di dimensione 3 con singolaritaterminali; sia E ' CP1 una curva su X. Se E · KX = 0 ed E puo essere contratta dauna mappa h : X → Z allora esiste un flop (X′, E′).
Un problema che sicuramente deve essere considerato e che ha solo recente-mente trovato soluzione riguarda l’esistenza o meno del flip in dimensione arbi-traria. Innanzitutto specifichiamo meglio il l’argomento di cui stiamo parlando.
Definizione 5.2.3 (Flip di una contrazione piccola). Sia f : X → Y una contrazionepiccola per cui KX e un divisore Q-Cartier e tale per cui tutte le curve contratte da fhanno intersezione negativa con KX (cioe−KX e f -ampio). Una varieta X+, consideratacongiuntamente ad un mofrismo birazionale proprio f + : X+ → Y e detta flip di f seKX+ e un divisore Q-Cartier f +-ampio e la mappa f + e ancora una contrazione piccola.La situazione e descritta dal diagramma
X //____
f5
5555
5 X+
f +
Y
(5.8)
e la mappa razionale f + f−1 : X 99K X+ viene detta, con abuso di linguaggio, flip diX.
Fatto 5.2.4. La varieta X+ e birazionale alla varieta X e, se il flip esiste, si ha allora che
X+ ' Proj⊕n>0
f∗OX(nm0KX),
dove m0 e un intero positivo per cui m0KX e un divisore di Cartier.
Il flip di una contrazione piccola cosı come e stato appena definito va quindiad eliminare tutte le curve KX-negative contratte dalla contrazione presenti sullavarieta. Con uno sguardo all’algoritmo del MMP possiamo quindi dire che ar-rivati al caso delle contrazioni piccole, invece di scendere un gradino e utilizzare

5.3 Esempio: il Flip di Francia 68
la varieta Y (come si fa nel caso della contrazione divisoriale), ci spostiamo late-ralmente di un passo con il flip e riprendiamo il procedimento (vedi diagramma(5.8)).
Molti dei problemi con cui abbiamo a che fare cercando di eseguire l’algorit-mo riguardano essenzialmente i flip. Da una parte bisogna assicurarsi che il flipesista e dall’altra e necessario dimostrare che non possiamo avere una sequenzainfinita di flip. Entrambi questi problemi sono stati risolti negli anni ’80 da Morie da altri, ma per la dimostrazione nel caso generale si e dovuto attendere, comevedremo nei prossimi capitoli, fino al 2006.
Come gia anticipato, oltre al flip, abbiamo un altra interessante operazione ditipo cut & paste sulle curve: il flop.
Definizione 5.2.5 (Flop di una contrazione piccola). Sia f : X → Y una contrazionepiccola per cui KX e un divisore Q-Cartier ad intersezione nulla su tutte le curve con-tratte da f (cioe KX e numericamente f -triviale) e D un divisore Q-Cartier su X tale percui −D sia f -ampio. Una varieta X considerata insieme ad un morfismo birazionaleproprio f : X → Y e detta flop di f se KX e Q-Cartier e numericamente f -triviale,D e f -ampio e f e una contrazione piccola. La mappa f f−1 : X 99K X vieneanche detta flop di X e il diagramma indotto e
X //____
f5
5555
5 X
f
Y
E cosa nota che i modelli minimali non sono necessariamente unici, ma unimportante risultato di Kawamata (vedi [Kaw]) descrive la relazione tra dueeventuali modelli.
Teorema 5.2.6. Se f : X1 99K X2 e una mappa birazionale tra due diversi modelliminimali allora f e una sequenza di flop.
5.3 Esempio: il Flip di Francia
Vogliamo ora costruire un esempio di flip a partire dalla costruzione dellaSezione 5.1. Il flip che costruiremo viene detto Flip di Francia in onore di PaoloFrancia che lo scoprı.
In riferimento alla sezione 5.1, consideriamo il cono
C0 = (xy− uv = 0) ⊂ C4.
e su C0 l’azione di Z2 f : C0 → C0 data da
(x, y, u, v) 7→ (x,−y, u,−v).

5.3 Esempio: il Flip di Francia 69
Restano naturalmente indotte le mappe definite da f su C12, C1 e C2. Consideratala famiglia di piani P2
λ ⊂ C0, abbiamo che gli elementi della famiglia invariantiper l’azione f sono P2
∞ = (v = y = 0), che viene fissato punto a punto, e P20 =
(x = u = 0), che viene fissato come luogo e la restrizione di f a P20 e l’opposto
dell’identita. Sulla varieta C1 i punti fissi sono quindi i punti di q1P2∞, mentre su
C2 i punti fissi sono dati da E2 ∩ P20 e dai punti di P2
∞.
Fatto 5.3.1. Accade che se M e una varieta liscia tridimensionale e g una azione di Z2
su M, le uniche singolarita di M/Z2 possono provenire solamente dai punti fissi di g.In un punto fisso l’azione g e come C3/(azione lineare). Si possono presentare alcunicasi non banali:
1. (x, y, z) 7→ (x, y,−z), il luogo fissato ha dimensione 2 e risulta
C3/Z2 ' C3 (x, y, z) 7→ (x, y, z2);
2. (x, y, z) 7→ (x,−y,−z), il luogo fissato e dato da una retta e
C3/Z2 ' (u2u3 − u34) ⊂ C4 (x, y, z) 7→ (x, y2, z2, yz);
3. (x, y, z) 7→ (−x,−y,−z), il luogo fissato si riduce ad un punto isolato e ilquoziente ha una singolarita isolata.
Tornando a noi, investighiamo il comportamento dell’azione indotta da f suC1 e C2. A tal fine, analizziamo la struttura, ad esempio, di C1. Abbiamo cheE viene contratto in E1 dalla mappa q1 e, in riferimento alla risoluzione di C,abbiamo che E1 e una retta sopra l’origine del cono C. In C1 abbiamo quindi laretta E1 e una famiglia di piani trasversali ad E1 dati dai P1
λ = q1P1λ; indichiamo
con F la classe di uno di questi piani. Abbiamo poi un’altra famiglia data daipiani scoppiati q1P2
λ passanti tutti per la retta E1; indichiamo con L la classe diuno di questi piani. La varieta C1 e quindi una sorta di libro i cui fogli sonodati dai piani di classe L, il cui frontespizio e dato da E1 che parametrizza unafamiglia di piani trasversali dati dalla classe F (Figura 5.2).
Da quanto appena visto e dalle (5.5) abbiamo il seguente fatto.
Fatto 5.3.2. Nella situazione precedente, il gruppo di Picard di C1 e generato da L e daF e si ha che E1 · L = −1 e E1 · F = 1 dove F e la classe di un piano e L e la classe di unpiano scoppiato nell’origine. Si ha inoltre che F · F = 0.
Dal momento che su C1 i punti fissi dell’azione f sono i punti del pianoq1P2
∞ la dimensione del luogo fisso e 2 e siamo quindi nel caso 1 del fatto 5.3.1;possiamo affermare quindi che il quoziente C1/Z2 e liscio.

5.3 Esempio: il Flip di Francia 70
Figura 5.2: C1 e come un libro...
Fatto 5.3.3. Data la mappa quoziente π : C1 → C1/Z2, accade che
π∗(E1) · KC1/Z2 = 1. (5.9)
Dimostrazione. Calcoliamo KC1 ; dal momento che KC1 e generato da L e da Fabbiamo
KC1 = aF + bL.
F e la classe di un piano e quindi KF = −3Λ dove Λ e la classe di una retta delpiano; ma usando la formula di aggiunzione possiamo scrivere
KF = (KC1 + F) · F
= (aF + bL + F) · F = aF · F + bF · L + F · F,
ma F · F = 0 e F · L = (retta); si ha quindi
KF = bF · L = bΛ
Dalle due scritture di KF otteniamo che
−3Λ = bΛ e quindi che b = −3. (5.10)
Dal momento che la classe di L e data da un piano scoppiato abbiamo che se E1
e la classe della retta eccezionale,
KL = KP2 + E1;
indicato con Σ la classe della trasformata propria in L di una retta del piano,otteniamo che KP2 = −3(Σ + E1) e quindi che
KL = −3(Σ + E1) + E1 = −3Σ− 2E1.

5.3 Esempio: il Flip di Francia 71
Grazie alla formula di aggiunzione e alla (5.10) abbiamo
KL = (KC1 + L) · L
= (aF− 3L + L) · L = aF · L− 2L · L = aΣ− 2E1.
Dalle due espressioni di KL otteniamo
−3Σ− 2E1 = aΣ− 2E1 e quindi che a = −3 (5.11)
Mettendo insieme la (5.10) e la (5.11) otteniamo
KC1 = −3F− 3L. (5.12)
Osserviamo che, in generale, data una mappa π : X → Y si ha che π∗(KY) =KX − (Ram), dove (Ram) e un divisore prodotto dalle eventuali ramificazioni.Tornando al nostro problema, abbiamo E1 ⊂ C1, la mappa π : C1 → C1/Z2 e laparte di ramificazione e data da L. Abbiamo quindi che
π∗KC1/Z2 = KC1 − L (5.13)
e vogliamo calcolare π(E1) · KC1/Z2 . Grazie alla formula di proiezione e alla(5.13) si ha che
π∗(E1) · KC1/Z2 = E1 · π∗(KC1/Z2) = (KC1 − L) · E1
= KC1 · E1 − L · E1 = KC1 · E1 − (−1) = (−3F− 3L) · E1 + 1
= −3F · E1 − 3L · E1 + 1 = +3− 3 + 1 = 1
e quindi π∗(E1) · KC1/Z2 = +1.
Fatto 5.3.4. Data la mappa quoziente π : C2 → C2/Z2, accade che
π∗(E2) · KC2/Z2 = −12
. (5.14)
Dimostrazione. Sappiamo che C2 e l’unione disgiunta dei P2λ e si ha che Pic(C2) e
generato dalle classi di P2λ e q2P1
λ. Indichiamo con D la classe di P2λ e con G quella
di q2P1λ, per quanto gia visto
E2 · D = 1 e E2 · G = −1. (5.15)
Su C2 i punti fissi di π sono E2 ∩ P20 e i punti di P2
∞ e quindi C2/Z2 ha unasingolarita isolata nel punto π(T) = π(E2 ∩ P2
0 ); La varieta C2/Z2 non e liscia inπ(T) e quindi ci sono delle difficolta nel definire KC2/Z2 . Per riuscire a calcolare

5.3 Esempio: il Flip di Francia 72
π∗(E2) · KC2/Z2 facciamo appello al Lemma 4.5.1 che, dal momento che l’ordinedi Z2 e 2, ci assicura l’esistenza di 2KC2/Z2 . Si ha quindi che
π∗E2 · KC2/Z2 =12
π∗E2 ·(2KC2/Z2
). (5.16)
Cerchiamo di calcolare KC2 . Indichiamo con D la classe di P2λ e con G quella
di q2P1λ; in qualche senso, D e un piano e G e un piano scoppiato. Inoltre, per
quanto gia visto, abbiamo
E2 · D = 1 e E2 · G = −1D · D = 0 e G · D = Λ
Con notazioni simili al Fatto 5.3.3 abbiamo che
KC2 = aD + bG e KD = −3Λ.
Ma anche
KD = (KC2 + D) · D = (aD + bG + D) · D = (a + 1)D + bG · D = bΛ
e quindi b = −3. Procedendo analogamente al conto fatto nel Fatto 5.3.3 siottiene
KC2 = −3D− 3G. (5.17)
Data la π : C2 → C2/Z2 si ha che π∗(2KC2/Z2
)= KC2 − D poiche la parte di
ramificazione e data da D e da un punto. Calcoliamo.
π∗E2 ·(2KC2/Z2
)= (KC1 − D) · E2 = (−3D− 3G− D) · E2 = (−4D− 3G) · E2
−4D · E2 − 3G · E2 = −4 + 3 = −1.
Si ha quindi che
π∗(E2) · KC2/Z2 =12
π∗(E1) · 2KC2/Z2 = −12
.
Osservando quanto ottenuto nel Fatto 5.3.3 e nel Fatto 5.3.4 abbiamo chela proiezione di E2 su C2/Z2 genera un raggio estremale negativo, mentre laproiezione di E1 genenera un raggio estremale positivo in C1/Z2. L’operazioneche ci permette di passare da C2/Z2 a C1/Z2 e il flip. La situazione puo esseredescritta con il diagramma
C2/Z2 //____
===
====
C1/Z2
C
Osserviamo inoltre che mentre la C2/Z2 ha una singolarita, la C1/Z2 e liscia: ilflip migliora le singolarita della varieta.
Capitolo 6
Log-framework e MetodiCoomologici
L’approccio di Mori ha prodotto molti e importanti risultati e ha, in un certosenso, permesso libera navigazione verso mari mai esplorati prima e ha raggiun-to praticamente tutti gli obiettivi nel caso delle varieta liscie di dimensione 3;tuttavia nel tentativo di estendere i risultati a dimensione maggiore o nel casosingolare ci si e trovati davanti a non poche difficolta.
Per proseguire nello studio delle varieta a dimensione piu alta sono stati per-tanto introdotti altri metodi che hanno permesso di aggirare gli ostacoli pur nonperdendo nessuno dei risultati precedenti.
Il nostro obiettivo sara dimostrare il Teorema del Cono e delle Contrazioni,ma per far questo dovremo abbandonare i metodi basati essenzialmente su curverazionali e Bend & Break. Il nuovo ambiente in cui enunceremo e dimostreremoil Teorema viene tipicamente indicato come log-framework o geometria logaritmica;l’idea di fondo e considerare non solo varieta, ma coppie composte da una va-rieta e da un suo divisore. Questo approccio permettera da una parte di averepiu flessibilita e dall’altra potra utilizzare un’ampia gamma di teoremi di tipocoomologico.
6.1 Le coppie
Fin da piccoli siamo stati abituati a considerare semplicemente varieta; in questasezione avremo a che fare con varieta considerate congiuntamente a loro divi-sori. Data una varieta X e un divisore B e naturale considerare la coppia (X, B).Perche abbandonare la semplicita delle varieta per dedicarci allo studio delle

6.1 Le coppie 74
coppie? Uno dei motivi vantaggiosi che ci spingono su questa nuova strada edato dalle relazioni di aggiunzione che spesso mettono in relazione le varieta at-traverso il comportamento dei loro divisori canonici. Pensiamo alla nota formuladi aggiunzione:
(KX + S)|S = KS,
dove X e una varieta ed S e un suo divisore. Pare quindi naturale considerare(X, S) e sperare di ottenere nuovi risultati su X tentando un approccio di tipoinduttivo al problema utilizzando il divisore S che, come noto ha dimensionen− 1 dove n = dim X.
Prima di arrivare a qualcosa di veramente interessante, continuiamo con unpo’ di definizioni necessarie per apprendere il nuovo linguaggio che vorremoutilizzare.
Definizione 6.1.1. Dato un morfismo birazionale f : X → Y tra varieta, il luogoeccezionale, exc( f ), e l’insieme degli x ∈ X per cui f−1 non e regolare in f (x).
Definizione 6.1.2. Se X e una varieta e D un divisore su X. (X, D) e log liscia se Xe liscia e le componenti di D hanno intersezione trasversa. Diciamo che (X, D) e unacoppia se X e una varieta normale e B un Q-divisore con coefficienti in [0, 1] tale cheKX + B e Q-Cartier.
Data una certa varieta o una coppia, risulta importante sapere se ad essa epossibile associare una varieta liscia in qualche modo collegata all’oggetto dato.
Definizione 6.1.3. Sia X varieta, D un Q-divisore su X, il morfismo proiettivo bi-razionale f : Y → X e detto log risoluzione di (X, D) se Y e una varieta liscia, exc( f )e un divisore e
exc( f ) ∩ f−1(Supp(D))
ha intersezione trasversa.
I risultati di Hironaka si estendono anche in questo contesto e abbiamo ilseguente teorema.
Teorema 6.1.4. Sia D un Q-divisore su una varieta X, allora esiste una log risoluzionedi X.
Consideriamo ora alcuni semplici esempi di log risoluzione nel caso dellesuperfici.
Esempio 6.1.5. Consideriamo in P2 tre rette distinte che si incontrano in unpunto P. Scoppiando la varieta nel punto P si ottiene immediatamente una logrisoluzione. Si avra infatti che al posto di P ci sara il divisore eccezionale E e letre rette che si incontravano in P incontreranno E in tre punti distinti. La figura6.1 e particolarmente istruttiva.

6.1 Le coppie 75
Figura 6.1: Risoluzione di 3 rette incidenti in un punto
Esempio 6.1.6. Consideriamo nel piano proiettivo la cuspide di equazione y2 =x3. Dal momento che il blow-up separa le direzioni delle rette tangenti, scop-piando l’origine una prima volta otteniamo una “parabola” e la retta eccezionaletangente alla parabola. Scoppiando ancora una volta la parabola viene sostitui-ta da due rette e otteniamo cosı tre rette passanti per un punto. Scoppiando unaterza volta otteniamo una situazione analoga all’esempio precedente (Figura 6.2).
Figura 6.2: Risoluzione della Cuspide y2 = x3

6.2 Singolarita 76
Tornando alle coppie, osserviamo che se f : Y → X e una log risoluzione diuna coppia (X, B), possiamo, per qualche divisore A, scrivere:
KY = f ∗(KX + B) + A.
Definizione 6.1.7. Nella situazione appena descritta, se E e un divisore primo su Y,diciamo che la discrepanza di E rispetto a (X, B), indicata d(E, X, B), e il coefficientedi E in A. Si ha inoltre che la discrepanza di E e indipendente dalla risoluzione scelta.
Osservazione 6.1.8. Se X e D, come al solito, sono una varieta e un Q-divisore.Sia V e una sottovarieta liscia di codimensione > 2 e f : Y → X il blow-up di Xin V ed E il divisore eccezionale. Nel caso in cui
KY = f ∗(KX + D) + A,
il coefficiente di E in A risulta essere codV − 1− µV D dove µ e la molteplicita diD lungo V.
6.2 Singolarita
Come abbiamo avuto modo di osservare, nel tentativo di esecuzione del MinimalModel Program, e necessario arrendersi e abbandonare le varieta liscie permet-tendo la presenza di certe singolarita. Nella Sezione 4.5 del Capitolo 4 abbiamointrodotto le singolarita canoniche e quelle terminali; in questo nuovo ambientee possibile riintrodurre queste e altre tipologie di singolarita. Con il formalismodelle coppie che abbiamo sviluppato le definizione saranno sicuramente piu agilidi quelle date precedentemente.
Ecco quindi una lista delle singolarita con cui avremo a che fare.
Definizione 6.2.1. Sia (X, B) una coppia.
• Diciamo che (X, B) e terminale se:
- B=0;
- esiste una log risoluzione f : Y → X tale che d(E, X, B) > 0 per ognidivisore eccezionale primo E di f .
• Diciamo che (X, B) e canonica se:
- B=0;
- esiste una log risoluzione f : Y → X tale che d(E, X, B) > 0 per ognidivisore eccezionale primo E di f .

6.2 Singolarita 77
• Diciamo che (X, B) e Kawamata log terminale (klt) se:
- esiste una log risoluzione f : Y → X tale che d(E, X, B) > −1 per ognidivisore primo E di Y che e eccezionale per f o e la trasformata birazionale diuna componente di B.
• Diciamo che (X, B) e log canonica (lc) se:
- esiste una log risoluzione f : Y → X tale che d(E, X, B) > −1 per ognidivisore primo E di Y che e eccezionale per f o e la trasformata birazionale diuna componente di B.
• Diciamo che (X, B) e divisorialmente log terminale (dlt) se:
- esiste una log risoluzione f : Y → X tale che d(E, X, B) > −1 per ognidivisore eccezionale primo E di f .
Fatto 6.2.2. Le definizioni di singolarita terminali, canoniche, klt, lc sono indipendentidalla scelta della log risoluzione.
Fatto 6.2.3. Data una coppia (X, B) non lc con dim X > 1, si ha che per ogni intero lesiste un divisore E per cui
d(E, X, B) < l.
Dimostrazione. Consideriamo una risoluzione f e la solita scrittura
KY = f ∗(KX + D) + A.
Dal momento che la coppia non e lc, possiamo dire che in A = ∑ aiEi ci sara uncoefficiente aj < −1. Il divisore corrispondente Ej potra essere o eccezionale perf o la trasformata di una componente di B. Fissiamo un intero l. Nel caso incui l > −1 possiamo trovare Ej come sopra e otteniamo il risultato. Per il casol < −1, consideriamo una particolare situazione cercando di applicare l’osser-vazione 6.1.8. Il tutto e indipendente dalla risoluzione e quindi possiamo costru-ire una situazione specifica. Se la dim X > 1 possiamo considerare una varietaV di codimensione > 2; sia Y = BV X e sia E il divisore eccezionale. Il nostroobiettivo e trovare un divisore con discrepanza < l; in virtu dell’osservazione6.1.8 accade che affinche valga
d(E, X, B) = codV − 1− µV B < l
basta considerareµV B > codV − 1− l.
Prendendo quindi V con molteplicita in B sufficientemente grande, otteniamo ilrisultato.

6.2 Singolarita 78
Alcune informazioni utili.
Fatto 6.2.4. Terminale ⇒ Canonica ⇒ klt ⇒ dlt ⇒ lc.
Fatto 6.2.5. Sia (X, B) una coppia e f : Y → X una log risoluzione. Sia BY un divisoresu Y tale per cui
KY + BY = f ∗(KX + B).
La coppia (X, B) e
• terminale ⇐⇒ BY 6 0 e SuppBY =exc( f );
• canonica ⇐⇒ BY 6 0;
• klt ⇐⇒ ogni coefficiente di BY e < 1;
• lc ⇐⇒ ogni coefficiente di BY e 6 1.
Fatto 6.2.6. Se X una varieta liscia allora e terminale.
Dimostrazione. Supponiamo di avere X liscia e di considerare la coppia (X, 0).Il fatto di essere terminale risulta, per quanto gia osservato, indipendente dallarisoluzione scelta. La mappa identica
X id→ X
e ovviamente una risoluzione e vale KX = id∗(KX). X e quindi terminale.
Esempio 6.2.7.
Esploriamo le singolarita terminali nel caso delle superfici. Supponiamo diavere una superficie liscia X con una curva E ⊂ X con E = P1 tale per cui
E2 = −a, a > 0.
Grazie al teorema di Castelnuovo e a certi risultati di Michael Artin, sappiamoche e possibile contrarre E in una superficie singolare Y con una mappa f : X →Y. Qualche esempio
• Se a = 1 si ha che Y e liscia;
• Se a = 2 si ha che Y e il nodo in A3 di equazioni x2 + y2 − z2 = 0, unasingolarita canonica.
Dal momento che E = P1, KE ha grado −2 su E e, per aggiunzione, sappiamoche KE = (KX + E) · E, pertanto
KX · E = KE − E · E = −2 + a.

6.2 Singolarita 79
Cerchiamo ora di calcolare la discrepanza c in KX = f ∗(KY) + cE. Sappiamo cheE viene contratta e quindi
f ∗(KY) · E = KY · f∗(E) = 0.
PertantoKX · E = f ∗(KY) · E + cE · E
−2 + a = −ac
da cuic =
2− ac
.
• Se a = 1 allora c = 1; risulta che KX = f ∗(KY) + E e Y e terminale.
• Se a = 2 allora c = 0; risulta che KX = f ∗(KY) e Y e canonica.
• Se a > 3 allora −1 < c < 0; risulta che Y e kawamata log terminal.
Definizione 6.2.8. Data un morfismo proiettivo di varieta
f : X → Z,
D un divisore Q-Cartier su X; diciamo che D e nef su Z (o anche f -nef) se D · C > 0per ogni curva C ⊂ X contratta da f . D e detto numericamente zero su Z se D ·C = 0per ogni curva C ⊂ X contratta da f .
Diamo ora il primo importante risultato di questa sezione.
Lemma 6.2.9 (Lemma di Negativita). Siano X e Y varieta proiettive complesse nor-mali e sia π : X → Y un morfismo birazionale; sia −D un Q-divisore Q-Cartier su Xtale che per ogni curva C contratta da π si abbia C · (−D) > 0 (cioe−D divisore π-nef).Si ha allora che
D e effettivo ⇐⇒ π∗D e effettivo.
Dimostrazione. Osserviamo innanzitutto che si puo dimostrare che le curve effet-tive in Y provengono da oggetti effettivi su X; e quindi sempre vero che se D eeffettivo allora π∗D e ancora effettivo.
Osservazione 6.2.10. Se scriviamo il divisore D come somma D = ∑k Dk doveDk e la parte di D per cui π(Dk) ha codimensione k in Y, chiedere che π∗D siaeffettivo si traduce nel richiedere che D1 sia effettivo. D1 rappresenta infatti laparte che ha codimensione 1 e cioe l’unica parte che rimane un divisore e nonviene contratta da π.

6.2 Singolarita 80
Per dimostrare l’implicazione inversa consideriamo il divisore di Cartier D;sappiamo che D e effettivo se e solo se il suo pullback lo e, pertanto, grazie allarisoluzioni delle singolarita di Hironaka, possiamo limitarci a considerare il casoin cui X e varieta liscia.
Consideriamo pertanto D = ∑k Dk e supponiamo D1 effettivo. Cerchiamo dicostruire un’induzione sulla dimensione della varieta X.
Caso Base Consideriamo la superficie liscia X e sia D = D1 + D2. Sappiamoche D1 e effettivo e scriviamo D2 = D′
2 − D′′2 dove D′
2 e D′′2 sono effettivi, senza
componenti comuni sono contratti da π (hanno dimensione 2− 2 = 0).Sia ora C una curva irriducibile contratta da π; dal momento che D e π-
antinef abbiamo che D · C 6 0, cioe (D1 + D2) · C 6 0 e pertanto, siccome D1
e effettivo e C una curva contratta che non puo stare dentro D1 che non vienecontratto (e quindiD1 · C > 0),
D2 · C 6 D1 · C + D2 · C 6 0. (6.1)
Dal momento che sulle superficie le curve sono anche divisori ha senso consid-erare
D′′2 · D′′
2 = D′′2 · (D′
2 − D2) = D′′2 · D′
2 − D′′2 · D2.
Grazie alla (6.1) siamo sicuri che D′′2 · D2 6 0, ma e anche vero che D′′
2 · D′2 > 0
poiche non hanno componenti comuni sono effettivi e diversi. Abbiamo pertantoche
D′′2 · D′′
2 > 0. (6.2)
D’altra parte se consideriamo un divisore H ampio su Y si ha che siccome D′′2
e contratto ad un punto abbiamo che π∗D′′2 · H = 0 e quindi, grazie alla Formula
di Proiezione,D′′
2 · π∗H = 0. (6.3)
Richiamiamo ora un importante risultato di Hodge utile per la dimostrazione.
Teorema 6.2.11 (Teorema dell’indice di Hodge). Dato un divisore H ampio su unasuperficie X e un divisore D non numericamente triviale, se D ·H = 0, allora D ·D < 0.
Osservazione 6.2.12 (Vedi [Har77], V rem 1.9.1). Dal Teorema precedente si pos-sono trarre immediate conclusioni che forniscono una motivazione del nome cheesso porta. Considerato infatti il pairing di intersezione che si ha su N1 (divisorimodulo equivalenza numerica), si ottiene una forma bilineare che, grazie ad unTeorema di Sylvester puo essere diagonalizzata mettendo ±1 sulla diagonale. Il

6.2 Singolarita 81
Teorema dell’indice di Hodge dice quindi che la forma di intersezione ha indice(o segnatura) 1− σ, cioe si puo mettere nella forma
1 0 · · · 00 −1 · · · 0...
.... . .
...0 0 · · · −1
.
La (6.3) afferma che, in un certo senso, D′′2 e π∗H sono ortogonali; grazie
all’ampiezza di H accade che (π∗H)2 > 0 e quindi, in virtu dell’osservazione6.2.12 dovremmo avere che (D′′
2 )2 < 0. Quanto provato nella (6.2) assicura quin-di che D′′
2 deve essere numericamente triviale. Essendo effettivo per costruzione,necessariamente si ha D′′
2 = 0. Pertanto
D = D1 + D2 = D1 + (D′2 − D′′
2 ) = D1 + D′2
e quindi D e effettivo.
Passo Induttivo Consideriamo ora dim X = n > 2. Sia Y′ l’intersezione di n−2 sezioni iperpiane generiche in Y; per ragioni legate alla dimensione abbiamoche Y′ e una superficie. Muovendo un poco le sezioni possiamo fare in modoche X′ = π−1(Y′) sia ancora una superficie. Accade inoltre che Y′ ha al piusingolarita isolate e che, grazie al Teorema di Bertini, X′ e liscia.
Consideriamo la restrizione di D a X′. Sappiamo che (D)|X′ = (D1)|X′ +(D2)|X′ e che (D)|X′ e π|X′ -antinef. Grazie al Caso Base sappiamo che (D)|X′ eeffettivo. Siccome X′ incontra ogni componente di D2 possiamo affermare cheD2 e effettivo.
Sia ora H una sezione generale liscia iperpiana di X (dim H = n − 1 < n).Cerchiamo di utilizzare l’ipostesi induttiva per la mappa πH : H → N dove N ela normalizzazione di π(H). La situazione e descritta dal diagramma
D ⊂ X
π
⊃ H
π|H
πH
##FFFFFFFFF
Y ⊃ π(H) Nνoo
Il morfismo π|H si fattorizza attraverso la normalizzazione come ν πH ; sappia-mo che ν e un morfismo finito per cui sapendo che D|H e π|H-antinef, ma peripotesi abbiamo che (π|H)∗D|H e effettivo e quindi siccome ν e finito si ha che(πH)∗D|H e effettivo e per ipotesi induttiva otteniamo che D|H e effettivo.
Possiamo pertanto affermare che D deve essere effettivo in quanto se per as-surdo avesse qualche parte negativa, dovremmo avere parti negative anche inD|H il che e in contraddizione con quanto provato.

6.2 Singolarita 82
Ancora una definizione.
Definizione 6.2.13. Data una superficie normale X e una risoluzione f : Y → X,f (o Y) e detta risoluzione minimale di X se ogni altra risoluzione f ′ : Y′ → X sifattorizza attraverso f :
Y
f
Y′f ′//
??~~~~~~~X
.
Diamo ora senza dimostrazione un prezioso ed interessante risultato lascia-toci in eredita dal giovane Mumford.
Teorema 6.2.14. Considerata una risoluzione di singolarita per una superificie normalesi avranno certi divisori primi eccezionali Ei. La matrice
[Ei · Ej]i,j
risulta essere definita negativa. In particolare e possibile calcolare le discrepanze interse-cando ogni curva eccezionale con il divisore KY + BY = f ∗KX .
Lemma 6.2.15. Data una risoluzione minimale f : Y → X di una superficie normaleX, ci ha che
KY + BY = f ∗KX con BY effettivo.
Dimostrazione. Mostriamo inizialmente che KY e nef su X. Sappiamo che (KY +C) · C = 2pa(C)− 2, dove pa(C) e il genere aritmetico che, come noto, e sempre> 0. Grazie all’osservazione di Mumford sulla matrice del luogo eccezionale, seC e una curva contratta, risulta C2 < 0. Abbiamo quindi:
2pa(C)− 2 = KY · C + C · C.
Analizziamo i differenti casi.
• Se C · C = −1 abbiamo che
KY · C = 2pa(C)− 1.
Ma se fosse KY · C < 0 avremmo che 2pa(C)− 1 < 0, cioe 0 6 2pa(C) < 1e quindi pa(C) = 0 cioe C curva razionale liscia. Pertanto ottenuamo una(−1)-curva nel senso di Castelnuovo e il teorema di Castelnuovo ci perme-tte di affermare che potremmo contrarre ancora una volta. La risoluzione fnon sarebbe quindi minimale.

6.2 Singolarita 83
• Se C · C 6 −2 con semplici conti otteniamo che
KY · C > 2pa(C) > 0.
La nostra affermazione sulla nefness di KY e quindi provata.
Consideriamo ora
f ∗KX · C = f∗ f ∗KX · f (C) = KX · f (C) = 0,
poiche C viene contratta e f (C) e un punto. Ma e anche vero che f ∗KX = KY +BY, per cui
0 = f ∗KX · C = (KY + BY) · C = KY · C + BY · C.
Dal momento che KC · C > 0, si ha che BY e antinef. Tuttavia sappiamo che ingenerale vale f∗(KY + BY) = KX , ma per normalita risulta che f∗(KY) = KX .Deve quindi valere f∗(BY) = 0; in particolare f∗KX e effettivo, le ipotesi dellemma di negativita sono soddisfatte e quindi BY e effettivo.
Teorema 6.2.16. Una superficie X e liscia se e solo se e terminale.
Dimostrazione. (⇒) Vale in generale (vedi Fatto 6.2.6).
(⇐) Sia X varieta terminale. Considero una risoluzione minimale f : Y →X. Grazie al lemma precedente possiamo affermare che f ∗KX = KY + BY
con BY effettivo. Dal momento che la varieta e terminale, dobbiamo ancheavere che
KY = f ∗(KX) + ∆
dove ∆ e un opportuno divisore che contiene i divisori eccezionali ed e taleche
∆ = ∑ eiEi con ei > 0.
Ma alloraf ∗KX = KY + BY
f ∗KX = KY − ∆.
Per cui dovrebbe essere BY = −∆, ma essendo entrambi effettivi abbiamoun assurdo.
Riassumendo abbiamo quindi che se nella risoluzione abbiamo Y 6= X pos-siamo costruire un divisore BY che produce un assurdo. Deve quindi essereY = X; Y e liscia per definizione e quindi anche X lo e.

6.3 Modelli Canonici 84
6.3 Modelli Canonici
Prima di dedicarci a specificare le modifiche da fare al MMP nel caso logaritmico,presentiamo un altro approccio allo studio delle varieta intimamente collegatocon la teoria dei modelli minimali.
Definizione 6.3.1 (Anello Canonico). Alla varieta X e associato in modo del tuttonaturale l’anello canonico
R(X, KX) =⊕m>0
H0(X, mKX).
Fatto 6.3.2. L’anello canonico e un invariante birazionale.
Dimostrazione. Per quanto visto nel Teorema 3.1.8, se f : X 99K X′ e una mappabirazionale allora abbiamo un isomorfismo su tutte le componenti graduate del-l’anello canonico e pertanto R(X, KX) risulta essere invariante birazionale.
La domanda fondamentale che riguarda l’anello canonico che ci si pone ese R(X, KX) sia o meno finitamente genrato. La risposta affermativa in dimen-sione arbitraria (in dimensione bassa era gia nota) a questa domanda e arrivatasolamente nel 2006 da Birkar, Cascini, Hacon McKernan.
Definizione 6.3.3 (Modello Canonico). Se R(X, Y) e finitamente generato chiamiamomodello canonico la varieta
Xcan = Proj(R(X, KX)).
Osserviamo che il Modello Canonico Xcan non e necessariamente birazionalealla varieta X e non deve neanche avere la stessa dimensione. Quel che accade eche la dimensione di Xcan e pari alla dimensione di Kodaira della varieta.
Il Modello Canonico e in stretta relazione con il Modello Minimale. Supponi-amo infatti che data una varieta X abbia modello minimale Xmin; si ha che KXmin
e nef, ma ci saranno eventualmente certi raggi estremali ad intersezione zero conil canonico. Il modello Xcan e ottenuto da Xmin contraendo tutte le curve sullequali il divisore canonico KXmin ha grado 0.
In particolare si ha che KXmin e nef, mentre KXcan e ampio.Rimandiamo al capitolo successivo per altre considerazioni circa i modelli
canonici, ma prima citiamo un importante risultato di Zariski.
Teorema 6.3.4. Sia X una varieta proiettiva normale e sia D un divisore di Cartier suX con |D| privo di punti base. Si ha allora che
• l’anello R(X, D) =⊕
m>0 H0(X, mD) e finitamente generato;

6.4 Minimal Model Program 85
• per ogni r sufficientemente grande il morfismo ϕrD ha fibre connesse e la suaimmagine e normale.
Dimostrazione. Vedi [Deb01].
6.4 Minimal Model Program
Avendo sviluppato il formalismo delle coppie e avendo tradotto nel formalis-mo del log-framework le singolarita interessanti, possiamo ora vedere come si tra-ducono i concetti di modello minimale e di contrazione per arrivare alle modi-fiche necessarie da apportare al Minimal Model Program.
Definizione 6.4.1. Una coppia proiettiva log-canonica (Y, BY) e detta minimale se ildivisore KY + BY e nef.
Una contrazione g : Y → Z di un raggio estremale (KY + BY)-negativo e dettafibrazione di Mori se dim Y > dim Z.
Definizione 6.4.2 (Modello Minimale, Fibrazione di Mori). Siano (X, B) e (Y, BY)due coppie log-canoniche e sia f : X 99K Y una mappa birazionale tale per cui BY = f∗B(cioe l’inversa di f non contrae nessun divisore). In questa situazione (Y, BY) e dettomodello minimale di (X, B) se KY + BY e nef e se
d(E, X, B) > d(E, Y, BY)
per ogni divisore primo E su X contratto da f .Una mappa g : Y → Z e una fibrazione di Mori per (X, B) se la g e una contrazione
(KY + BY)-negativa per cui
d(E, X, B) > d(E, Y, BY)
per ogni divisore primo E su X contratto da f .
Osserviamo quindi che la minimalita della varieta viene rispecchiata dal-la minimalita della discrepanza dei divisori contratti all’interno della classe diequivalenza birazionale alla quale appartiene la varieta di partenza.
Ricordiamo innanzitutto che nel caso di una coppia (X, B) la dimensione diKodaira e definita ponendo
κ(X, B) = κ(KX + B).
Nell’affrontare il problema di classificazione delle varieta agebriche, o megliodelle coppie, la speranza che abbiamo e quella di arrivare a provare un risultatocome quello evidenziato dalla sequente congettura.

6.4 Minimal Model Program 86
Congettura 6.4.3. Se (X, B) una coppia proiettiva log-canonica allora accade che:
• se κ(X, B) < 0 allora (X, B) ha una Fibrazione di Mori;
• se κ(X, B) > 0 allora (X, B) ha un Modello Minimale.
Nel caso in cui non ci sia il Modello Minimale, si ha che il problema e ri-dotto allo studio di oggetti di dimensione inferiore; suppondendo di lavorarecon un approccio induttivo sulla dimensione anche questa e una conclusionesoddisfacente.
Per tentare di arrivare alla risposta l’idea e quella di eseguire un MMP cheavra passi molto simili a quelli delineato nell’algoritmo del Capitolo 4.
Presentiamo ora un’altra congettura degna di nota.
Congettura 6.4.4 (Congettura dell’abbondanza). Sia (Y, B) una coppia minimalelog-canonica; si ha allora che m(KY + B) e privo di punti base per qualche m sufficiente-mente grande. In particolare si ha che esiste una contrazione h : Y → S detta Fibrazionedi Itaka e un Q-divisore ampio H su S tale per cui
KY + B = h∗H.
Alla luce della finita generazione dell’anello canonico di cui parleremo piutardi, possiamo dire che la varieta S nella congettura precedente non e altro cheil modello canonico.
Ricordiamo e precisiamo alcune affermazioni.
Definizione 6.4.5 (Contrazione di un raggio estremale). Sia R un raggio estremaleper una varieta proiettiva normale X Una contrazione f : X → Z e una contrazione diR se
f (C) = punto ⇐⇒ [C] ∈ R.
Fatto 6.4.6 (Classificazione delle contrazioni). Consideriamo una contrazione f diun raggio estremale R; si possono presentare i seguenti casi:
• Fibrazione. f non e birazionale;
• Contrazione divisoriale. f e birazionale e contrae dei divisori;
• Contrazione piccola. f e birazionale e non contrae divisori.
Nel caso della Contrazione piccola sara necessario effettuare l’operazione diflip.

6.4 Minimal Model Program 87
Definizione 6.4.7 (Flip). Sia (X, B) una coppia con X proiettiva. Si ha un flip diKX + B se abbiamo che il diagramma
X //____
f5
5555
5 X+
f +
Y
e tale per cui
• X+ e Z sono varieta normali;
• f e contrazione di un raggio estremale R e f ed f + sono contrazioni piccole;
• −(KX + B) e ampio su Z e (KX+ + B+) e ampio su Z dove indichiamo con B+ latrasformata propria di B.
Fatto 6.4.8. Se X e varieta proiettiva allora contrazioni divisoriali e flip preservano laQ-fattorialita di X.
Definizione 6.4.9 (Minimal Model Program). Diamo quindi una descrizione dellaprocedura del MMP per le coppie KLT.
1. (X,B) coppia KLT con X Q-fattoriale e proiettiva.
2. Se KX + B e nef abbiamo trovato un modello minimale.
3. Se KX + B non e nef c’e un raggio R estremale (KX + B)-negativo e la contrazioneassociata f : X → Y.
- Se dim X > dim Y abbiamo una Fibrazione di Mori e ci fermiamo.
- Se f e una contrazione divisoriale sostituiamo (X, B) con (Y, f∗B) e ripeti-amo la procedura.
- Se f e una contrazione piccola sostituiamo (X, B) con il flip (X+, B+) eripetiamo la procedura.
E cosa nota che non e possibile avere sequenze infinite di contrazioni divisori-ali, tuttavia affinche tutto funzioni, dobbiamo ancora trovare risposta affermativaalle seguenti congetture.
Congettura 6.4.10. Se KX + B non e nef esiste un raggio estremale (KX + B)-negativoed una contrazione associata.
Congettura 6.4.11. Esistono i flip.
Congettura 6.4.12. Ogni sequenza di flip termina.

6.5 Strategia 88
La Congettura 6.4.11 e stata recentemente risolta mentre per la Congettura6.4.12 si hanno dei risultati che assicurano la terminazione di una certa sequenzadi flip; nel prossimo capitolo faremo alcuni accenni ai fatti noti riguardanti questecongetture. La Congettura 6.4.10 invece non e altro che l’ormai atteso Teoremadel Cono e delle Contrazioni. Il resto di questo Capitolo sara consacrato alladimostrazione di questo teorema.
6.5 Strategia
La strategia per arrivare al Teorema del Cono utilizzera consistentemente il log-framework sviluppato in questo capitolo e una serie di teoremi basati su metodicoomologici. Ci pare utile delineare quelli che saranno i passi fondamentali perarrivare alla nostra meta.
1. Teorema di non svanimento di Shokurov (6.6.9). Da delle condizioni peril non svanimento di H0(X, mD + A) dove D e divisore nef e A effettivoche soddisfa certe ipotesi. Di questo Teorema daremo solo una traccia didimostrazione.
2. Teorema Base Point Free (6.6.11). Da condizioni affinche il sistema |mD|associato ad un certo divisore nef D sia privo di punti base. Ne daremocompleta dimostrazione nella Sezione 6.6.
3. Teorema di Razionalita (6.7.2). Garantisce la razionalita del valore di uncerto parametro. Per la dimostrazione rimandiamo ad esempio a [Deb01].
4. Teorema del Cono e delle Contrazioni (6.7.3). Descrive la forma dellaparte negativa del Cono delle curve e garantisce l’esistenza di contrazioniper i raggi estemali negativi. Ne daremo completa dimostrazione nellaSezione 6.7.
Non resta altro da fare che intraprendere la strada delineata.
6.6 Il Teorema Base Point Free
Per dimostrare il teorema BPF faremo un uso spietato di risultati legati allo svani-mento o meno di certi gruppi di coomologia. Facciamo quindi il punto dellasituazione elencando gli strumenti che utilizzeremo per sconfiggere BPF.
Teorema 6.6.1. Siano X e Y varieta, X normale; sia poi π : Y → X un morfismoproprio birazionale. Sia D un divisore di Cartier su X e sia F un divisore effettivo di

6.6 Il Teorema Base Point Free 89
Cartier su Y tale per cui Supp(F) ⊂ Exc(π). Si ha che
H0(X, D) ' H0(Y, π∗D + F).
Il risultato fondamentale, capostipite e modello di una vera e propria famigliadi teoremi di (non) svanimento, e il seguente teorema.
Teorema 6.6.2 (Teorema di svanimento di Kodaira). Sia X una varieta proiettivacomplessa liscia e sia D un divisore ampio su X. Allora
Hi(X, KX + D) = 0 per ogni i > 0.
Definizione 6.6.3. Se D = ∑ aiDi e un R-divisore, l’arrotondamento per eccesso(round-up) di D e dato da
dDe = ∑daieDi,
dove daie e il piu piccolo intero maggiore o uguale a ai.La parte frazionaria di D e data dall’R-divisore effettivo
〈D〉 = dDe − D.
Definizione 6.6.4. Si dice che un divisore effettivo D ha simple normal crossing(SNC) se le componenti del divisore ridotto Dred sono lisce e hanno intersezione trasver-sa. Un Q-divisore effettivo ha SNC se un suo multiplo a coefficienti interi ha SNC.
E cosa nota che se un divisore D su X ha SNC e π : Y → X e un morfis-mo proiettivo birazionale il cui luogo eccezionale ha SNC, allora π∗D ha ancoraSNC.
Teorema 6.6.5 (Teorema di svanimento di Kawamata-Viehweg). Sia X una varietaproiettiva complessa liscia e sui D un Q-divisore nef e big la cui parte frazionaria haSNC. Allora si ha che
Hi(X, KX + dDe) = 0 per ogni i > 0.
Una conseguenza del teorema di Hironaka sulla risoluzione delle singolaritae questa utile osservazione.
Fatto 6.6.6. Sia D un divisore di Cartier effettivo su una varieta X; esiste una desingo-larizzazione π : Y → X tale per cui il luogo base del sistema lineare |π∗D| e un divisorecon simple normal crossing.
Il Teorema di svanimento di K-V ha un’utile generalizzazione al caso logarit-mico.

6.6 Il Teorema Base Point Free 90
Teorema 6.6.7 (Teorema di log-svanimento di K-V). Sia (X, ∆) una coppia log ter-minal proiettiva e sia D un Q-divisore Q-Cartier big e nef su X tale per cui KX + ∆ + Dsia un divisore di Cartier. Si ha allora
Hi(X, KX + ∆ + D) = 0 per ogni i > 0.
Prima di arrivare al teorema Base Point Free, dobbiamo affrontare ancora ilteorema di non svanimento di Shokurov che sara l’arma finale con cui sconfig-gere BPF. La dimostrazione di questi due teoremi presenta certe somiglianze;come lavoro propedeutico, presentiamo quindi alcune considerazioni riguardoalla strategia di dimostrazione usata sia nel teorema di Shokurov sia in quella diBPF.
Consideriamo, per semplicita, il caso in cui X sia varieta proiettiva liscia e siaD un divisore nef su X. Vogliamo produrre elementi di |mD|, per m sufficiente-mente grande, sapendo, ad esempio, che aD− KX e ampio per qualche a > 0. Atal fine supponiamo, per un certo m 0, di poter scrivere
mD = KX + H + F (6.4)
dove H e ampio e F e un’ipersuperficie liscia. Grazie al teorema di Kodairaabbiamo che H1(X, KX + D) = 0; considerata pertanto la successione esatta
0 → OX(KX + H) → OX(KX + H + F) → OF(KK + H) → 0,
la successione esatta lunga in coomologia ci permette di ottenere il segmento
H0(X, KX + H + F) → H0(F, KF + H) → H1(X, KX + H) = 0
e quindi che la mappa
H0(X, KX + H + F) → H0(F, KF + H) (6.5)
e suriettiva. Una prima idea potrebbe essere sperare di trovare sezioni di mD =KX + H + F facendo induzione sulla dimensione. Infatti grazie alla suriettivitaappena provata della mappa in (6.16), le sezioni sull’ipersuperficie potrebberoessere tirate indietro ottenendo cosı sezioni globali su X di mD. Potremmo, conun opportuno ragionamento, riuscire a dimostrare che |mD| non ha punti base.
La decomposizione mD = KX + H + F risulta tuttavia un’ipotesi troppoforte. Cerchiamo un’altra strada; intendiamo sfruttare in maniera essenziale lageometria di X e, per far questo, utilizziamo un certo blow-up
π : Y → X.
Grazie al teorema 6.6.1 sappiamo che per ogni E divisore effettivo eccezionaleper π risulta
H0(X, mD) ' H0(Y, mπ∗D + E).

6.6 Il Teorema Base Point Free 91
Se riuscissimo a fare in modo che
H1(Y, mπ∗D + E− F) = 0 (6.6)
per qualche F, potremmo utilizzare la successione esatta lunga come abbiamofatto precedentemente nel caso della decomposizione mD = KX + H + F. Gra-zie alla successione esatta lunga otterremmo infatti un segmento esatto e l’an-nullarsi di 6.6 permetterebbe di costruire una mappa suriettiva grazie alla qualepotremmo mostrare che |mD| non e vuoto.
Per ottenere la (6.6) dobbiamo riuscire a scrivere
mπ∗D ∼ KY + ∆Y + (nef e big)− (eccezionale effettivo) + F. (6.7)
In tal caso infatti, abbiamo che
mπ∗D + E− F ∼ KY + ∆Y + (nef e big)− (eccezionale effettivo) + F + E− F.
Dal momento che E e eccezionale effettivo possiamo cancellare E con la parteeccezionale effettiva e ottenere che
H1(Y, mπ∗D + E− F) = H1(Y, KY + ∆Y + (nef e big)) = 0
grazie al Teorema di log-svanimento di K-V.Al fine di riuscire ad ottenere la (6.7), scriviamo
KY + ∆Y ∼ π∗KX + ∑ aiFi. (6.8)
Costruiamo, piu o meno esplicitamente, il blow-up che ci interessa. A tal finesupponiamo cheOX(bD) abbia sezioni per qualche b; in tal caso si ha cheOX(bD)definisce un morfismo razionale che puo essere risolto mediante lo scoppiamen-to π del luogo base di |bD|. La situazione e descritta dal seguente diagramma
Y
π
ϕ
!!BBB
BBBB
B
X|bD|//___ PN .
(6.9)
Tirando indietro bD si ottiene una parte mobile data da ϕ∗(H) dove H e l’iperpi-ano in PN e da una parte fissa:
bπ∗D ≡ M + ∑ riFi, (6.10)
dove |M| e privo di punti base e π(Fi) sta nel luogo base. Abbiamo quindi chemπ∗D e linearmente equivalente a
mπ∗D + KY − π∗KX −∑ aiFi︸ ︷︷ ︸∼0 per la (6.8)
+ cM + c ∑ riFi − cbπ∗D︸ ︷︷ ︸∼0 per la (6.10)
+ aπ∗D− aπ∗D︸ ︷︷ ︸=0
.

6.6 Il Teorema Base Point Free 92
Si ottiene quindi che
mπ∗D ∼ KY + (m− cb− a)π∗D + cM + π∗(aD− KX)−∑(ai − cri)Fi. (6.11)
Sappiamo che M e big in quanto risoluzione dell’indeterminazione; osserviamopertanto che nel caso in cui m > cb + a e c > 0, il divisore
(m− cb− a)π∗D + cM + π∗(aD− KX)
risulta essere nef e big in quanto somma di una parte nef e una parte big; comevedremo successivamente nel dettaglio di Base Point Free, accade che e possibilescegliere c > 0 e uno degli Fi che indicheremo con F in modo che
∑(ai − cri)Fi = (effettivo eccezionale)− F− ∆Y.
Abbiamo quindi che
mπ∗D ∼ KY + ∆Y + (nef e big)− (effettivo eccezionale) + F.
Tutto questo si puo fare facendo in modo che mini(ai − cri) = −1 e che inoltre ilminimo sia realizzato per un solo indice i corrispondente ad F; in questa fase lacondizione ai > −1 data dall’avere singolarita terminali gioca il suo ruolo. Nelladimostrazione del teorema Base Point Free vedremo i dettagli di questo tipo diragionamento e rischiareremo alcuni passaggi volutamente nebluosi di questaprima fase.
Un punto cruciale della dimostrazione di Base Point Free sara l’utilizzo delteorema di non svanimento di Shokurov. Per la dimostrazione rimandiamo illettore al libro di Debarre. Prima di enunciare il teorema di Shokurov, ecco unutile risultato.
Fatto 6.6.8. Sia X una varieta proiettiva complessa e M un Q-divisore su X nef e big.Esiste una desingolarizzazione π : Y → X e un divisore ridotto ∑ Fi su Y che ha SNCe che contiene il divisore eccezionale di π per cui risulta che per ogni ε > 0 esisitononumeri razionali pi ∈ (0, ε) per cui
π∗M−∑ piFi e ampio.
Traccia di Dimostrazione. Sappiamo che la controimmagine di un divisore nef ebig mediante una mappa genericamente finita e ancora nef e big. Grazie ad unaforma del teorema di Hironaka abbiamo che e possibile supporre che la varieta Xsia liscia. Sappiamo che in questa situazione esiste un Q-divisore effettivo L su Xper cui M− tL e ampio per tutti i razionali t ∈ (0, 1). Hironaka garantisce anchel’esistenza di una desingolarizzazione π : Y → X tale per cui Supp(π∗dLe) ∩exc(π) e un divisore con SNC.

6.6 Il Teorema Base Point Free 93
In questa situazione, posto D = π∗M abbiamo che D e ancora big e nef eche e sempre possibile scrivere D = H + E dove H e ampio ed E e un divisoreeffettivo contratto dalla π che risolve l’indeterminazione (come nella (6.9)). Si haquindi che
mD = mD− D + H + E
da cuiD =
1m((m− 1)D + H
)+
1m
E = H′ +1m
E,
con H′ ampio poiche somma di una parte nef e una ampia. Possiamo quindiscrivere l’ugliaglianza di divisori su Y
(big e nef) = (ampio) + (effettivo a coefficienti piccoli a piacere).
Per una dimostrazione piu dettagliata rimandiamo il lettore al Lemma 7.29 di[Deb01].
Teorema 6.6.9 (Teorema di non svanimento di Shokurov). Sia (X, ∆) una coppiacomplessa proiettiva log-terminale, sia D un divisore nef di Cartier su X e sia A undivisore effettivo di Cartier su X tale per cui aD + A− (KX + ∆) e nef e big per qualchea > 0 razionale. Si ha allora che per ogni m abbastanza grande
H0(X, mD + A) 6= 0.
Questo teorema viene spesso utilizzato con A = 0; la presenza di A aggiungetuttavia al teorema una flessibilita utile sia nel corso della dimostrazione sia perampliare il campo di applicazione del teorema stesso. Abbiamo anche una sortadi stima per il piu piccolo intero che verifica il teorema.
Fatto 6.6.10. Nella situazione del teorema precedente, abbiamo che esiste un intero mtale che
m 6 dae+ dim(X)
e che soddisfa il teorema.
La dimostrazione del non svanimento di Shokurov usa sfrutta in manieracruciale la geometria della varieta X grazie ad un opportuno scoppiamento. Perla dimostrazione completa rimandiamo a [Deb01], ma riportiamo una tracciaschematica per dare al lettore un’idea del percorso seguito.
Traccia di Dimostrazione del Teorema. 6.6.9
I Riduzione al caso in cui D non e numericamente triviale.
II Riduzione al caso in cui X e liscia e aD + A− (KX + ∆) e ampio.

6.6 Il Teorema Base Point Free 94
III Esistono interi positivi b e t e un divisore M ∼ t(bD + A− (KX + ∆)) conmolteplicita maggiore di 2t · dim(C) in x0 ∈ X − Supp(A + ∆).
IV Costruzione di un blow-up π : Y → X tale che π∗(mD + A) e numerica-mente equivalente a
KY + ∆Y + (ampio) + (effettivo)− (eff. eccez.) + (liscio).
V Applicazione del Teorema di svanimento di Kawamata-Viehweg (6.6.5).
Eccoci pronti al risultato principale di questa sezione.
Teorema 6.6.11 (Teorema Base Point Free). Sia (X, ∆) una coppia complessa proiet-tiva log-terminale e sia D un divisore nef di Cartier su X tale per cui aD − (KX + ∆)e nef e big per qualche a > 0 razionale. Allora il sistema lineare |mD| e privo di puntibase per ogni intero m abbastanza grande, cioe D e semiampio.
Nel caso in cui X sia varieta proiettiva con singolarita canoniche e KX sia bige nef e jXKX sia un divisore di Cartier, il teorema ci assicura quindi che |mjXKX | eprivo di punti base per ogni m 0. Abbiamo pertanto che la congettura dell’ab-bondanza (vedi 6.4.4) e dimostrata per varieta di tipo generale. Inoltre, grazie alTeorema 6.3.4, abbiamo immediatamente il seguente interessante risultato.
Corollario 6.6.12. Sia X una varieta complessa con singolarita canoniche e indice jX .Se KX e nef e big allora l’anello canonico
R(X, KX) =⊕m>0
H0(X, mjXKX)
e finitamente generato.
Dimostrazione del Teorema 6.6.11. Applicando il teorema di Shokurov con A = 0possiamo dire che, per un opportuno m 0, H0(X, mD) 6= 0. Avremo pertantosezioni di mD e possiamo supporre che ci sia una parte effettiva: il sistema lineare|mD| non e vuoto. Consideriamo ora un intero b > 2 e definiamo
B(b) = Bs|bD| =⋂
C∈|bD|Supp(C).
Dal momento che X e una varieta proiettiva, sappiamo che e noetheriana. Cer-chiamo di costruire una catena discendente di chiusi. I B(b) sono ovviamentedei chiusi ed e facile osservare che B(br+1) ⊆ B(br). Abbiamo pertanto che lasuccessione
B(br)r>0

6.6 Il Teorema Base Point Free 95
e tale per cui la catena di inclusioni
B(b) ⊇ B(b2) ⊇ B(b3) ⊇ · · ·
si stabilizza ad un certo elemento B∞(b). Si possono presentare due casi.
Caso I. B∞(b) = ∅ per ogni b.Se r e un intero sufficientemente grande, risulta in particolare che
B(2r) = B(3r) = ∅.
Lemma 6.6.13. Ogni intero positivo N sufficientemente grande puo scriversi comecombinazione lineare a coefficienti non negativi di m e n interi positivi primi tra loro.
Dimostrazione. Le soluzioni reali (x, y) dell’equazione
mx + ny = N (6.12)
sono date, al variare di N da una retta come in figura 6.3.
Figura 6.3: Le soluzioni di mx + ny = N
Al crescere di N la lunghezza del segmento di retta dato dall’intersezione conil primo quadrante (entrambe le coordinate positive) tende ad inifinito. Ora sap-piamo che una soluzione intera (A, B) della (6.12) e data dall’identita di Bezout.Se (A, B) sta nel primo quadrante abbiamo risolto il problema, altrimenti si hache le altre soluzioni intere della retta si trovano tutte ad una distanza d l’unadall’altra e d non dipende da N ma solo da m e da n. Se N e sufficientementegrande, il segmento di retta nel primo quadrante sara piu lungo di d e avremoquindi che almeno una soluzione intera giace nel primo quadrante. Troviamocosı A′ > 0 e B′ > 0 per cui N = A′m + B′n.

6.6 Il Teorema Base Point Free 96
Applicando questo piccolo lemma aritmetico nel caso N = m con 2r e 3r
(evidentemente coprimi), abbiamo che m = u2r + v3r e quindi che
B(m) = B(λ · 2r + µ · 3r) ⊆ B(2r) ∪ B(3r) = ∅.
Pertanto Bs|mD| = ∅ e il teorema e dimostrato.
Caso II. B∞(b) 6= ∅ per qualche b.Cerchiamo di arrivare ad un assurdo. Come facile conseguenza del Fatto
6.6.6, possiamo affermare che esiste una desingolarizzazione τ : Y → X di X taleper cui
brτ∗D ∼ M + E (6.13)
dove E e un divisore effettivo con simple normal crossing ed e esattamente illuogo base di |brτ∗D|, mentre |M| e privo di punti base. Sappiamo per ipotesiche aD− (KX + ∆) nef e big e quindi anche τ∗(aD− (KX + ∆)) lo e. Applicandopertanto il Fatto 6.6.8 possiamo supporre di avere una desingolarizzazione π :Y → X e certi divisori Fi in Y tali che:
(a) dati ri > 0 e⋃
ri>0 π(Fi) = B∞(b), il sistema lineare |brπ∗D−∑ riFi| e basepoint free (essenzialmente una conseguenza della (6.13));
(b) il divisore π∗(aD − (KX − ∆)) − ∑ piFi e ampio dove i pi ∈ (0, 1) sonoarbitrariamente piccoli (grazie al Fatto 6.6.8);
(c) KY ∼ π∗(KX + ∆) + ∑ aiFi con ai > −1 per tutti gli i (la coppia (X, ∆) elog-terminale).
Osserviamo che la (c) dell’enenco precedente mette bene in evidenza l’im-portanza di avere una coppia log-terminale. Sia ora m un intero positivo e sia cun razionale positivo. Definiamo il divisore
Nm,c = mπ∗D− KY + ∑(−cri + ai − pi)Fi.
Accade che
Nm,c = mπ∗D− KY − c ∑ riFi + ∑ aiFi −∑ piFi
∼ mπ∗D− π∗(KX + ∆)−∑ aiFi − c ∑ riFi + ∑ aiFi −∑ piFi
= mπ∗D− π∗(KX + ∆)− c ∑ riFi −∑ piFi,
dove il segno di equivalenza lineare e immediata conseguenza della (c). Contin-uando la catena, aggiungendo e togliendo cbrπ∗D e aπ∗D, possiamo provare cheNm,c e linearmente equivalente a
mπ∗D− cbrπ∗D + cbrπ∗D− aπ∗D + aπ∗D− π∗(KX + ∆)− c ∑ riFi −∑ piFi,

6.6 Il Teorema Base Point Free 97
il che equivale a
(m− cbr − a)mπ∗D + c(brπ∗D−∑ riFi
)+[π∗(aD− (KX + ∆)−∑ piFi)
].
Nel caso in cui m > cbr + a abbiamo:
(d) dal momento che D e nef, π∗D e nef e quindi anche (m− cbr − a)mπ∗D enef;
(e) grazie al punto (a) di sopra, c (brπ∗D−∑ riFi) e privo di punti base equindi e nef;
(f) grazie al punto (b) di sopra, [π∗(aD− (KX + ∆)−∑ piFi)] risulta essereampio.
Riassumendo, dal momento che Nm,c e equivalente alla somma di una parte nefed una ampia, abbiamo che se m > cbr + a allora Nm,c e ampio.
Siccome siamo nel caso in cui B∞ 6= 0 abbiamo che i coefficienti ri delle Fi in-trodotti nella (a) non possono essere tutti zero. Sappiamo inoltre, grazie all’ipote-si log-terminale, che ai > −1 e che i pi sono arbitrariamente piccoli. Pertantoai − pi > −1 per ogni i. Abbiamo quindi che
c = mini
1 + ai − Piri
risulta essere un razionale positivo ed inoltre
mini
(−cri + ai − pi) = mini
(−1− ai + pi + ai − pi) = −1.
Grazie ancora al Fatto 6.6.8, pur preservando l’ampiezza, modificando di poco ipi possiamo fare in modo che il minimo si realizzi esattamente per un solo indicei = i0. Fissiamo quindi la nostra attenzione su ri0 e sia F = Fi0 il corrispondentedivisore liscio.
Dalla definizione di Nm,c scriviamo
KY + Nm,c = KY + mπ∗D− KY + ∑(−cri + ai − pi)Fi
= mπ∗D + (−cri0 + ai0 − pi0)Fi0 + ∑k 6=0
(−crik + aik − pik )Fik .
Risulta quindiKY + Nm,c = mπ∗D− F + B, (6.14)
avendo posto B = ∑k 6=0(−crik + aik − pik )Fik . Grazie al fatto che per k 6= 0 siha −crik + aik − pik > −1 possiamo osservare che dBe e effettivo e inoltre B noncontiene F.

6.6 Il Teorema Base Point Free 98
Vogliamo ora applicare il teorema di svanimento di Kawamata-Viehweg allavarieta Y e al divisore Nm,c; dal momento che Nm,c e ampio allora e anche big enef e non e difficile convincersi che la parte razionale di Nm,c ha simple normalcrossing. Le ipotesi del teorema sono verificate e quindi possiamo affermare che
H1(Y, KY + dNm,ce) = 0. (6.15)
Usando la (6.14) possiamo scrivere la successione esatta
0 → OY(KY + dNm,ce) → OY(dmπ∗D + Be) → OF(mπ∗D + dBe) → 0,
e, grazie alla successione esatta lunga, possiamo scrivere il segmento
H0(Y, mπ∗D + dBe) → H0(F, mπ∗D + dBe) → H1(Y, KY + dNm,ce) = 0
da cui si deduce che la mappa
H0(Y, mπ∗D + dBe) → H0(F, mπ∗D + dBe) (6.16)
e suriettiva.Consideriamo ora un certo m = bs in modo che sia piu grande di cbr + a. In
virtu del Teorema 6.6.1, siccome dBe e un divisore effettivo supportato sul luogoeccezionale, possiamo affermare che
H0(Y, mπ∗D + dBe) ' H0(X, mD), (6.17)
e quindi, grazie alla (6.16) e alla (6.17), e possibile costruire una mappa
H0(X, mD) → H0(F, mπ∗D + dBe) (6.18)
che risulta essere ancora suriettiva.Dal momento che π(F) ⊂ B(m) = B∞(b), si ha che F e contenuto nel pullback
mediante π del luogo base di mD e pertanto tutti gli elementi di H0(X, mD)si annullano su F. L’immagine della mappa (6.18) si annulla e quindi, per lasuriettivita, abbiamo che
H0(F, mπ∗D + dBe) = 0. (6.19)
Sia ora dcbr + ae > cbr + a; la restrizione ad F di Ndcbr+ae,c, essendo la restrizionedi un divisore ampio, sara ancora ampio ed inoltre abbiamo
(Ndcbr+ae,c)|F = (dcbr + aeπ∗D− KY + ∑(−cri + ai − pi)Fi)|F= (dcbr + aeπ∗D− KY + B− F)|F= (dcbr + aeπ∗D + B)|F − (KY + F)|F= (dcbr + aeπ∗D + B)|F − KF,

6.7 Il Teorema del Cono e delle Contrazioni 99
dove l’ultima uguaglianza e dovuta alla formula di aggiunzione.Siamo pronti a trovare una contraddizione con il teorema di non svanimento
di Shokurov. Abbiamo infatti che dBe e effettivo ed ha simple normal crossing;π∗D e nef e quindi anche suoi multipli positivo lo sono; essendo (Ndcbr+ae,c)|Fampio e anche big e nef. Applicando il teorema di Shkurov con ∆ = 0 dovremmoavere
H0(F, mπ∗D + dBe) 6= 0 (6.20)
in contraddizione con la (6.19). Il Caso II non puo quindi presentarsi e il teoremae dimostrato.
6.7 Il Teorema del Cono e delle Contrazioni
In questa sezione completiamo l’avvicinamento al Teorema del Cono e ne diamola dimostrazione.
Osservazione 6.7.1. Ricordiamo che un divisore D su una varieta normale X sidice libero se il suo luogo base e vuoto. In tal caso la mappa razionale ϕD : X →P? associata a D risulta essere un morfismo e la fattorizzazione di Stein dellamappa ϕD ci da una contrazione ψD : X → Y tale per cui
D ∼ ψ∗D H,
per qualche divisore ampio H su Y
Oltre al Teormea Base Point Free appena dimostrato, per aver ragione delnostro Teorema, abbiamo bisogno di un altro risultato
Teorema 6.7.2 (Razionalita). Sia (X, B) una coppia kawamata log terminal in cui X eproiettiva. Sia H un divisore ampio di Cartier su X. Se KX + B non e nef, si ha che
λ = max t > 0 | t(KX + B) + H e nef
e un numero razionale; inoltre si puo scrivere con frazione avente denominatore limitatonon dipendente da H, ma esclusivamente dai dati iniziali (X, B).
Eccoci pronti per scoprire e descrivere la forma del cono delle curve effettive.
Teorema 6.7.3 (Cono e Contrazioni). Sia (X, B) una coppia kawamata log terminalin cui X e proiettiva. Allora l’insieme dei raggi estremali Ri negativi su KX + B e taleche:
• NE(X) = NE(X)KX+B>0 + ∑ Ri.
• Ogni Ri contiene la classe di una curva Ci: [Ci] ∈ Ri.

6.7 Il Teorema del Cono e delle Contrazioni 100
• Ogni Ri puo essere contratto.
• L’insieme degli Ri e discreto in NE(X)KX+B<0.
Come conseguenza di un Teorema di Kawamata per cui rimandiamo il lettorea [Deb01], si ha che i raggi estremali Ri del Teorema vegono generate da curverazionali, in accordo con quanto detto a proposito dei lemmi di bend & break.
Dimostrazione. Nel caso in cui KX + B e nef non abbiamo nulla da provare; pos-siamo quindi supporre che KX + B non sia nef. La situazione e graficamenterappresentata dalla figura 6.4.
Figura 6.4: Il Cono delle Curve NE(X) rispetto a KX + B
Ad un divisore nef Q-Cartier D e possibile associare lo spazio delle curveortogonali a D:
FD = c ∈ N1(X) | c · D = 0 .
Definiamo oraC = NE(X)KX+B>0 + ∑ FD,
dove D e un divisore nef e Q-Cartier tale che dim FD = 1. Puntiamo a dimostrareche NE(X) = C.
Supponiamo quindi per assurdo che NE(X) 6= C; si vede facilmente che C ⊂NE(X), supponiamo quindi che esista
c ∈ NE(X)− C.
Scegliamo ora un funzionale lineare α : N1 → R in modo che sia positivosu C − 0 e negativo in c; sia G il divisore associato ad α. In sintesi scegliamoG in modo che G = 0 lasci C dalla parte positiva e c dall’altra. La figura 6.5risulta decisamente utile per seguire il ragionamento; infatti mostra la struttura

6.7 Il Teorema del Cono e delle Contrazioni 101
Figura 6.5: Il Cono delle Curve NE(X) e il il cono C
di N1(X) e permette di visualizzare la posizione dei coni rispetto ai luoghi cheannullano certi divisori.
Osserviamo che su c sia KX + B sia C devono essere negativi: graficamenteparlando, stiamo dicendo che c deve stare nel terzo quadrante.
Consideriamo ora G− t(KX + B).Osserviamo che il luogo in cui G − t(KX + B) = 0 puo essere rappresentato
simbolicamete come una retta di equazione y = tx nel piano le cui coordinate(x, y) sono rispettivamente KX + B e G.
Consideriamo NE(X)KX+B=0.Per t > 0 si ha che G− t(KX + B) e positivo su NE(X)KX+B=0. La figura 6.5 ci
da una buona intuizione di questo fatto, ma d’altra parte se condideriamo d chesi annulla su KX + B, abbiamo che
[G− t(KX + B)] · d = G · d− t(KX + B) · d = G · d,
ma sappiamo che G e positivo su NE(X)KX+B=0 poiche, per costruzione, lo e sututto NE(X)KX+B>0.
Consideriamo NE(X)KX+B<0.Ci chiediamo se ci sia un certo t per cui G − t(KX + B) lascia tutto il cono
NE(X) dalla parte positiva. Accade, ed e di nuovo graficamente evidente dallafigura, che se t e abbastanza grande riusciamo ad otterere la situazione sperata.Quanto dev’essere grande t? Se f ∈ (KX + B) · g 6 0, affinche risulti [G −t(KX + B)] · f > 0 basta fare in modo che KX + B prevalga su tutto; ponendo
t >G · f
(KX + B) · f

6.7 Il Teorema del Cono e delle Contrazioni 102
otteniamo quanto desiderato.Osserviamo ora che c’e un t minimo per cui su NE(X)KX+B60 si ha che G −
t(KX + B) e nef. Sia
γ = min
t > 0 | G− t(KX + B) e nef su NE(X)KX+B60
.
Figura 6.6: Il Cono NE(X) con G− γ(KX + B) = 0
Accade che, su NE(X), G− γ(KX + B) e quasi sempre positivo tranne su unbordo del cono sul quale si annulla; in particolare e positivo su NE(X)KX+B>0.Dal momento che stiamo lavorando con coni chiusi, possiamo considerare uncerto t che scegliamo razionale in modo che
H = G− t(KX + B)
sia ampio (cioe lascia NE(X) tutto dalla parte positiva).Applicando il teorema di razionalita per il divisore ampio H cosı ottenuto
possiamo affermare che
λ = max u > 0 | u(KX + B) + H e nef
e un numero razionale. Osserviamo che, per come e definito H, il luogo u(KX +B) + H = 0 puo ancora essere rappresentato come una retta per l’origine. Dopoaver trovato λ, poniamo
D = H + λ(KX + B).
Facciamo il punto della situazione. Al divisore D possiamo naturalmente asso-ciare lo spazio FD. Non puo accadere che dim FD = 1, poiche altrimenti sarem-mo gia nel nostro cono C. Mostriamo che nel caso in cui dim FD > 1 e possi-bile scomporre FD in sottospazi di dimensione strettamente inferiore e quindi,

6.7 Il Teorema del Cono e delle Contrazioni 103
induttivamente, di dimensione 1. Tutto cio ci portera immediatamente ad unacontraddizione.
Supponiamo dunque di avere dim FD > 1. Lo spazio FD dovra essere gen-erato da almeno due elementi linearmente indipendenti; come primo genera-tore prendiamo KX + B, come secondo consideriamo un certo H1 linearmente in-dipendente da KX + B e supponiamo di poterlo scegliere ampio. Siamo costrettia scegliere il nuovo divisore H1 perche dalla nostra costruzione risulta evidenteche H non risulta essere linearmente indipendente da KX + B su FD.
Sia ε1 > 0 sufficientemente piccolo; preso s > 0 possiamo considerare
λ(s, ε1H1) = max t > 0 | sD + ε1H1 + t(KX + B) e nef .
Sappiano che sD e nef, ε1H1 e ampio, ma (KX + B) e negativo su alcune curve; alcrescere di t si ha quindi che il contributo di (KX + B) aumenta fino a far caderela nefness della combinazione lineare considerata.
Osserviamo cheλ(s, ε1H1) < λ(0, ε1H1)
e abbiamo un bound che non dipende da s; infatti se consideriamo oggetti in FD
abbiamo che D risulta nullo e λ non dipende da s.Accade che se s e sufficientemente grande
FsD+ε1 H1+λ(s,ε1 H1)(KX+B) ⊂ FD
e l’inclusione risulta propria. Se infatti consideriamo g tale per cui(sD + ε1H1 + λ(KX + B)
)· g = 0,
otteniamo chesD · g + ε1H1 · g + λ(KX + B) · g = 0.
Al crescere di s il primo addendo cresce mentre il resto resta fissato; l’unico modoperche questo possa accadere e che D · g = 0 e quindi g ∈ FD. L’inclusione strettaproviene dall’indipendenza lineare che abbiamo supposto.
Abbiamo quindi trovato dentro FD un sottospazio di dimensione inferiore e cipossiamo quindi ricondurre a considerare solamente sottospazi di dimensione 1.Tirando le fila del discorso otteniamo una contraddizione che ci permette quindidi concludere che
NE(X) = NE(X)KX+B>0 + ∑ FD.
Il risultato finora trovato puo essere migliorato fino ad arrivare alla tesi elim-inando la chiusura da ∑ FD. A tal fine consideriamo N1(X) e supponiamo dipoter costruire una base formata da
KX + B, H1, . . . , Hn, con gli Hi ampi.

6.7 Il Teorema del Cono e delle Contrazioni 104
Consideriamo l’insieme
T = c ∈ N1(X) tali che (KX + B) · c = −1 ;
sia R un raggio estremale e D un divisore Q-Cartier e nef per cui R = FD. Presoc ∈ T ∩ R, ci proponiamo di calcolare λ(s, εjHj). Dal momento che c ∈ FD
abbiamo in particolare che
0 =(
D + εj Hj + λ(D, εj Hj)(KX + B))· c =
= D · c + εj Hj · c + λ(D, εjHj)(KX + B) · c,
ma D · c = 0, (KX + B) · c = −1 e quindi
λ(D, εj Hj) = εjHj · c.
Ma sappiamo che λ e un razionale con denominatore limtato e non e quindipossibile avere troppi raggi estremali. La parte negativa di NE(X) e discreta e siha quindi
NE(X) = NE(X)KX+B>0 + ∑ Ri.
Occupiamoci ora della parte del teorema riguardante le contrazioni. Fissiamoun raggio estremale R negativo su KX + B e mostriamo che puo essere contratto.Sappiamo che, dato R, esiste un D nef e Q-Cartier tale che R = FD. Consideriamoa > 0 e chiediamoci se
L = aD− (KX + B)
e positivo. Scelto a sufficientemente grande in L prevale il comportamento diD (che e nef) e quindi L risultera ovunque positivo tranne al piu su FD dove,ovviamente, si annulla. Considerato tuttavia c ∈ FD abbiamo che L · c diventa−(KX + B) · c; per costruzione abbiamo che
(KX + B) · c < 0
e pertanto aD− (KX + B) risulta ampio per a abbastanza grande.Il Teorema Base Point Free ci assicura ora che esiste m ∈ N per cui mD e
libero. Abbiamo quindi una mappa ψD : X → Y ⊂ P? che e un morfismo.Affermiamo che ψD contrae tutte e sole le curve le cui classi stanno in R.
La situazione infatti e questa:
Xf //
ψD
P?
Y
>>~~~~~~~~
6.7 Il Teorema del Cono e delle Contrazioni 105
Inoltre sappiamo che per un divisore ampio H, f ∗(H) = mD. Consideriamo unacurva C in FD; se f (C) fosse una curva allora dovrebbe intersecare l’iperpiano Hdi P?, ma abbiamo che
0 = mD · C = f ∗(H) · C = f∗( f ∗(H)) · f (C) = H · f (C).
Si ha dunque che f (C) non puo essere una curva e deve quindi essere contrattaad un punto.

Capitolo 7
Ultime notizie
Come abbiamo avuto modo di sottolineare nei capitoli precedenti alcuni puntid’ombra sono stati tralasciati, ma in questo capitolo, alla luce dei recenti risultatisulla finita generazione dell’anello canonico di Birkar, Cascini, Hacon e McKer-nan (vedi [BCHM06]), cercheremo di schiarire alcune di queste questioni.
Il risultato principale che vogliamo discutere e contenuto in [BCHM06] ede stato parallelamente raggiunto con una dimostrazione che utilizza le idee delMMP dagli autori di [BCHM06] nel 2006 e, attraverso un’altra dimostrazione piuanalitica, da Siu.
Teorema (Finita generazione dell’anello canonico). Sia X una varietaproiettiva liscia, allora l’anello canonico
R(X) = R(X, KX) =⊕m>0
H0(X, mKX).
e finitamente generato.
Nell’articolo sopra citato gli autori riescono inoltre a dare risposta affermati-va alla Congettura 6.4.11 (esistenza dei flip) e ad apportare delle modifiche al-l’algoritmo del Minimal Model Program in modo da garantire la terminazione diuna sequenza di flip costruita in un certo modo; non e ancora la soluzione dellacongetura 6.4.12 (terminazione di ogni sequenza di flip), ma e sicuramente unrisultato interessante.

7.1 Riduzione del problema 107
7.1 Riduzione del problema
L’ambiente di lavoro che stiamo considerando e il log-framework precedentementesviluppato e una delle idee centrali che si utilizzano per raggiungere nuovi risul-tati e il tentativo di utilizzare l’induzione; in particolare risulta fondamentale,come gia sottolineato, il ruolo della formula di aggiunzione.
Dal momento che consideriamo coppie Kawamata log-terminali (X, ∆), ricor-diamo che in questa situazione l’anello canonico e dato da
R(KX + ∆) = R(X, KX + ∆) =⊕m>0
H0(X, m(KX + ∆)).
Un primo passo per avvicinarsi al Teorema e costituito dal seguente risultatodi Fujino e di Mori che mette in relazione la parte di un certo grado m dell’anellocaonico associato a (X, ∆) con quello associato ad un’altra coppia.
Teorema 7.1.1. Sia (X, ∆) una coppia KLT e sia ∆ un Q-divisore. Allora esiste unacoppia KLT Q-fattoriale (Y, Γ) di tipo generale per cui
R(KX + ∆)(m) ' R(KY + Γ)(m)
per qualche m > 0 sufficientemente divisibile.
Abbiamo quindi che per arrivare al Teorema generale basta dimostrare lafinita generazione dell’anello canonico per una coppia KLT di tipo generale.
Ora e cosa nota che se KX + ∆ e nef e di tipo generale allora grazie al TeoremaBase Point Free si ha che KX + ∆ e privo di punti base e pertanto (vedi Corollario6.6.12) si ha che R(KX + ∆) e finitamente generato.
Riassumendo, la situazione e descritta dalla seguente affermazione.
Fatto 7.1.2. Per mostrare che R(X) e finitamente generato per una qualsiasi varietaliscia proiettiva complessa, e sufficiente mostrare che esiste un Modello Minimale peruna coppia Kawamata log-terminale di tipo generale.
La via per dimostrare la finita generazione dell’anello canonico passa quindiinesorabilmente attraverso il Minimal Model Program e attraverso la risoluzionedi problemi come l’esistenza e la terminazione dei flip.
Teorema 7.1.3 (Birkar, Cascini, Hacon e McKernan). Se (X, ∆) una coppia KLT ditipo generale allora esiste un modello minimale Xmin, cioe esiste una mappa
f : X 99K Xmin
per cui KXmin + f∗∆ e semiampio.
7.2 MMP with scaling 108
Idea di Dimostrazione. Cerchiamo di fare induzione sulla dimensione della vari-eta procedendo a spirale.
• Hacon e McKernan nel 2005 hanno provato che se un modello minimaleper coppie KLT esiste in dimensione n allora esistono flip in dimensionen + 1.
• Se esistono i flip in dimensione n + 1 e i modelli minimali in dimensione nallora esistono modelli minimali in dimensione n + 1.
Per quanto riguarda l’esistenza dei flip rimandiamo ad un’attenta lettura di[BCHM06], mentre nella prossima sezione ci occuperemo di introdurre alcuneidee utilizzate per dimostrare la terminazione di una certa sequenza di flip.
7.2 MMP with scaling
L’idea che sta alla base delle modifiche al consueto MMP proviene dall’osser-vazione che nell’algoritmo e presente un certo grado di liberta. Il Teorema delCono e delle Contrazioni garantisce infatti la presenza di raggi estremali (e rela-tive contrazioni), ma non risolve il seguente problema.
Problema. Il Teorema del Cono e delle Contrazioni non indica alcunaprocedura sul modo di scegliere i raggi da contrarre.
Si ha pertanto una liberta fin eccessiva nella scelta del raggio da contrarre equesta indeterminazione diminuisce in un certo senso il grado di controllo cheabbiamo sull’esecuzione dell’algoritmo.
Si puo quindi cercare di eliminare questa liberta individuando un criterio piurigido per selezionare la contrazione e dimostrare la terminazione della sequen-za di operazioni cosı ottenuta. Il criterio individuato dagli autori di [BCHM06]utilizza un divisore ampio con un coefficiente decrescente (scalato) e l’algoritmomodificato che ne risulta prende il nome di Minimal Model Program with scaling.
Consideriamo una coppia KLT (X, ∆) tale per cui KX + ∆ non sia nef e pren-diamo un divisore ampio A per cui KX + ∆ + A e ampio. L’idea e di scalare Autilizzando tA fino al punto in cui il divisore KX + ∆ + tA non diventi nef; nelmomento in cui il divisore non e piu ampio accade che l’iperpiano individuatoda KX + ∆ + tA tocca il cono delle curve NE(X) in un raggio estremale. Ponendoquindi
t0 = inft > 0 tali che KX + ∆ + tA e nef,

7.2 MMP with scaling 109
abbiamo che KX + ∆ + t0 A tocca NE(X) in un raggio estremale R. Contraiamo ilraggio estemale negativo R = R+C dove C e una curva per cui
(KX + ∆ + t0 A) · C = 0.
Questo criterio permette di individuare in modo meno libero la sequenza dicontrazioni da utilizzare nel MMP e Birkar, Cascini, Hacon e McKernan hannodimostrato la terminazione proprio della sequenza cosı ottenuta.
A conclusione del capitolo vogliamo cercare di avere un’intuizione visiva deicambiamenti prodotti dal passaggio al MMP with scaling.
A tal fine, ricordiamo che un divisore D su una varieta X determina un iperpi-ano in N1(X) e divide l’intero spazio in una parte positiva (l’insieme delle curveC per cui C ·D > 0) e una parte negativa (C ·D < 0); in ques’ottica, se visualizzi-amo la situazione attraverso un grafico a due dimensioni, abbiamo che un raggioestremale R viene visualizzato come un punto e stara da una parte o dall’altrarispetto all’iperpiano in base al segno del suo prodotto con il divisore.
Analogamente, passando al duale, abbiamo che all’interno dello spazio deidivisori N1(X) un raggio estremale R spazzato da una curva C individua l’iper-piano dei divisori D tali per cui D · C = 0 e divide tutto N1(X) in una partepositiva e in una negativa.
Consideriamo ora la varieta X e il suo divisore canonico KX (che supponiamonon nef) e fissiamo un raggio estremale negativo R; la situazione e rappresentatadalla Figura 7.1.
Figura 7.1: Il cono NE(X) e un raggio estremale negativo R
Indicato con NefD(X) il cono dei divisori nef di X, abbiamo che nel graficoduale NefD(X) e, in un certo senso, appoggiato all’iperpiano individuato dalraggio R come in Figura 7.2 e il divisore canonico KX sara rappresentato da unpunto situato nella parte negativa dello spazio individuata da R.
Cerchiamo ora di capire quale potrebbe essere l’effetto di un flip sui graficiche abbiamo disegnato. Come abbiamo avuto modo di osservare piu volte, il flipX+ elimina le curve negative e le fa diventare positive. Accade pertanto che il

7.2 MMP with scaling 110
Figura 7.2: Il cono NefD(X) e il cono NefD(X+)
cono NefD(X+) dei divisori nef del flip sara completamente dall’altra parte diR = 0 rispetto al cono NefD(X); i due coni vengono quindi rappresentati comedue stanze aventi in comune la parete su R = 0. L’effetto grafico del flip, benevidenziato nella Figura 7.2, e quindi quello di avvicinare il cono nef al divisorecanonico KX .
L’esecuzione di un Minimal Model Program puo essere quindi interpretatagraficamente dentro N1 come un tentativo di raggiungere il punto KX attraver-sando progressivamente certe stanze.
Nel caso in cui l’esecuzione e un algoritmo di tipo MMP preveda esclusi-vamente operazioni di tipo flip, la differenza grafica tra il MMP e il MMP withscaling e ben evidenziata dalla Figura 7.3. Nel caso in cui si abbia a che fare anchecon contrazioni divisoriali lo spazio N1 non rimarrebbe invariato.
Figura 7.3: MMP vs MMP with scaling

7.2 MMP with scaling 111
Il MMP ha la liberta di scavalcare ogni muro tra le diverse stanze, mentre ilMMP with scaling e vincolato far muovere il divisore KX + ∆ + A dritto versol’obiettivo.
Denotiamo con EffD(X) il cono pseudoeffettivo, cioe la chiusura del cono deidivisori effettivi sulla varieta X; il risultato finale dell’esecuzione di un MMPdipende dalla posizione di KX rispetto a EffD(X).
Nell’articolo [BCHM06] gli autori sono riusciti infatti a dimostrare i seguentiTeoremi che sono una risposta quasi completa alla Congettura secondo cui unavarieta ammette Modello Minimale o risulta essere una Fibrazione di Mori.
Teorema 7.2.1. Se X una varieta proiettiva liscia con KX big, allora il Minimal ModelProgram with scaling termina e, in particolare, X ammette un Modello Minimale.
Teorema 7.2.2. Se X e una varieta proiettiva liscia con KX · C < 0 per qualche rico-primento dato da una famiglia di curve, allora X e birazionalmente equivalente ad unaFibrazione di Mori π : Y → Z.
In riferimento alla figura 7.3, il Teorema 7.2.1 afferma che se KX sta dentro ilcono pseudoeffettivo allora MMP with scaling raggiunge l’obiettivo e si trova unModello Minimale, mentre se KX sta fuori allora siamo nel caso della Fibrazionedi Mori. Nel caso in cui KX sia sul bordo del cono pseudoeffettivo nulla si puoancora dire, ma, come gia e stato detto, questa non e che un’ulteriore confermadi quanto viva e ricca di spunti possa essere la Teoria di Mori.

Appendice A
Il Teorema di Riemann-Rochper le superficie
In questa appendice presentiamo esplicitamente alcune costruzioni nel caso par-ticolare delle superficie; arriveremo inoltre a dimostrare una forma del Teoremadi Riemann-Roch. Per ulteriori dettagli riguardanti le superficie rimandiamo illettore a [Bea96].
Se non diversamente specificato, consideriamo una varieta liscia S. Avendoa che fare cun varieta di dimensione n = 2 abbiamo che 1-cicli e (n − 1)-ciclicoincidono.
Ricordiamo che il Gruppo di Picard Pic(S) e dato dalle classi di isomorfismo difasci invertibili o, equivalentemente, fibrati lineari. Ad ogni divisore D effettivoe possibile associare il fibrato lineare OS(D) e una sezione s ∈ H0(OS(D)), s 6= 0unica a meno di moltiplicazione tale che div(s) = D; Questa definizione puoessere ovviamente estesa per linearita a tutti i divisori. La mappa che a ciascundivisore D 7→ OS(D) permette di identificare Pic(S) con l’insieme dei divisori suS modulo equivalenza lineare.
Alla mappa tra varieta lisce
f : S → X,
e possibile associare l’omomorfismo
f ∗ : Pic(X) → Pic(S).
Se f e suriettiva allora possiamo definire la controimmagine di un divisore inmodo che
f ∗OX(D) = OS( f ∗(D));

A.1 Il pairing di intersezione 113
osserviamo che la controimmagine di una sezione non nulla di OX(D) e ancoranon nulla.
Se f e un morfismo genericamente finito tra superfici di grado d, accade chepossiamo definire f∗ di una curva irriducibile C in modo che:
f∗(C) =
0 se f (C) e un puntorΓ se f (C) e una curva Γ e il morfismo
C → Γ indotto da f e finito di grado r
Questa definizione si estende ovviamente per linearita a tutti i divisori.Accade che per due divisori linearmente equivalenti D ∼ D′ risulta f∗D ∼
f ∗D′ e che per un qualsiasi divisore su S, risulta f∗ f ∗D = dD.
A.1 Il pairing di intersezione
Nel caso delle superfici Pic(S) e particolarmente importante perche ha un pairingdi intersezione: a due divisori D e D′ si puo associare un numero di intersezione.Prima di andare a specificare la natura del pairing di intersezione, diamo alcuneutili definizioni.
Definizione A.1.1. Siano C e C′ due curve irriducibili distinte su una superficie S.Considerato x ∈ C ∩ C′, sia Ox l’anello locale di S in x. Supponiamo che localmente Ce C′ siano definite rispettivamente da equazioni f e g in Ox, definiamo molteplicita diintersezione di C e C′ in x
mx(C ∩ C′) = dimC
Ox
( f , g).
Questa nozione corrisponde all’idea intuitiva di intersezione tra due curve.Ad esempio si ha che mx(C ∩ C′) = 1 se e solo se ( f , g) generano un idealemassimale, cioe formano un sistema di coordinate locali in un intorno di x; inquesto caso si dice che C e C′ hanno intersezione trasversa.
Definizione A.1.2. Siano C e C′ due curve irriducibili distinte su una superficie S, ilnumero di intersezione C · C′ e definito da:
C · C′ = ∑x∈C∩C′
mx(C ∩ C′).
Ricordando che C e C′ sono rispettivamente definite da OS(−C) e OS(−C′),definiamo
OC∩C′ =OS
OS(−C) +OS(−C′).

A.1 Il pairing di intersezione 114
Osserviamo cheOC∩C′ e un fascio grattacielo su C∩C′, cioe si ha che in ogni puntox ∈ C ∩ C′ risulta
(OC∩C′)x =Ox
( f , g).
Si ha quindi che
C · C′ = dim H0(S,OC∩C′) = h0(S,OC∩C′).
Tutte le definizioni date sulle curve possono essere facilmente estese per linearitaai divisori.
Definizione A.1.3. Sia L un fascio su S, la caratteristica di Eulero-Poincare di L edata da
χ(L) = ∑i(−1)ihi(S, L).
Cerchiamo ora di estendere la nozione di intersezione anche ai fibrati lin-eari. Il seguente teorema ci da una definizione di intersezione tra fibrati che e inqualche senso coerente con la definizione di intersezione tra divisori che abbiamoappena dato.
Teorema A.1.4. Dati L ed L′ elementi di Pic(S), definiamo
L · L′ = χ(OS)− χ(L−1)− χ(L′−1) + χ(L−1 ⊗ L′−1).
Allora il pairing dato da · risulta essere una forma bilineare simmetrica su Pic(S) taleper cui, se C e C′ sono due curve irriducibili distinte allora
OS(C) · OS(C′) = C · C′.
Non diamo la dimostrazione di questo teorema, ma ricordiamo alcuni risul-tati utili per la sua dimostrazione.
Lemma A.1.5. Data una curva non singolare irriducibile C su S, per ogni L ∈ Pic(S),accade che
OS(C) · L = deg(L|C).
Teorema A.1.6. Sia D un divisore su S e sia H una sezione iperpiana di S per un certoembedding. Allora esiste n > 0 tale che D + nH e una sezione iperpiana per un altroembedding. In particolare, possiamo scrivere
D ∼ A− B
dove A e B sono curve liscie su S con A ∼ D + nH e B ∼ nH.

A.1 Il pairing di intersezione 115
Lemma A.1.7. Dati L e L′ fibrati lineari, possiamo scrivere L′ = OS(A− B) con A eB curve liscie su S e risulta
L · L′ = L · OS(A)− L · OS(B).
Dal momento che se D ∼ E risulta O(D) = O(E), il teorema A.1.4 ci per-mette affermare che per calcolare D · D′ e possibile considerare fattori linear-mente equivalenti. Questa semplice osservazione risulta particolarmente utilenel calcolo delle autointersezioni; vediamone qualche esempio.
Esempio A.1.8.
Sia C una curva liscia, f : S → C un morfismo suriettivo, F una fibra di f ,allora
F2 = F · F = 0
Si ha infatti che F = f ∗x per qualche punto x ∈ C; fissiamo un divisore A su Clinearmente equivalente a x per cui x /∈ A e F ∼ f ∗A. Dal momento che f ∗A ecombinazione lineare di fibre i f distinte da F, otteniamo che
F · F = F · f ∗A = 0.
Esempio A.1.9.
Sia S′ una superficie, g : S → S′ un morfismo genericamente finito di gradod, D e D′ divisori di S, Allora
g∗D · g∗D′ = dD · D′.
L’idea e che ”muovendo” D e D′ con l’equivalenza lineare, possiamo fare in mo-do che si intersechino in modo trasversale; anche i rispettivi pullback avrannointersezione trasversa e quindi risultera g∗D ∩ g∗D′ = g−1(D ∩ D′), da cui siottine facilmente il risultato.
Esempio A.1.10.
S = P2.Accade che Pic(S) = Z. Si ha infatti che ogni curva di grado d e linearmente
equivalente a d volte una retta. Un semplice calcolo ci produce il teorema diBezout. Sappiamo infatti che prese due curve C e C′, risulta C ∼ dL e C′ ∼ d′L′,per cui
C · C′ = dL · d′L′ = dd′(L · L′) = dd′.

A.2 Serre e Riemann-Roch 116
Esempio A.1.11.
S = P1 ×P1, cioe un superficie quadrica in P3.Ricordiamo l’immersione di Segre
P1 ×P1 → P3
(x, t), (x′, t′) 7→ (xx′ : xt′ : x′t : x′t′).
Consideriamoh1 = 0 ×P1
h1 = P1 × 0U = (P1 ×P1) \ (h1 ∪ h2) ∼= A2.
Ogni divisore su U e il divisore di una funzione razionale; se D divisore alloraesiste ϕ tale che D = div(ϕ). Consideriamo quindi un divisore D su S. Risultache D|U = divϕ per qualche ϕ ed esistono m ed n tali che
D = divϕ + mh1 + nh2 e D ∼ mh1 + nh2.
Abbiamo dunque che Pic(P1 × P1) = 〈h1, h2〉. Cerchiamo ora le relazioni tra igeneratori del gruppo. Posto h1 = 0 ×P1 e k1 = ∞ ×P1, risulta h1 ∼ k1 equindi h1 · h1 = h1 · k1 = 0. Si puo facilmente dedurre che
h1 · h1 = 0; h1 · h2 = 1; h2 · h2 = 0.
Se Γ e una curva su P1 × P1 definita da un polinomio omogeneo di bigrado(m, n), si ha che Γ ∼ mh1 + nh2; considerata un’altra curva Γ′ ∼ m′h1 + n′h2, siha quindi che
Γ · Γ′ = (mh1 + nh2) · (m′h1 + n′h2) =
= mm′(h1 · h1) + (mn′ + m′n)(h1 · h2) + nn′(h2 · h2) = mn′ + m′n.
A.2 Serre e Riemann-Roch
Possiamo ora puntare dritti al teorema di Riemann-Roch, obiettivo di questasezione. Ricordiamo innanzitutto l’enunciato della dualita di Serre per le su-perfici.
Teorema A.2.1. Sia S una superficie e L un fibrato lineare su S; sia ωS il fibrato line-are delle 2−forme differenziali su S. H2(S, ωS) risulta essere uno spazio vettoriale didimensione 1.
Allora per i = 0, 1, 2, il pairing indotto dal cup-product
Hi(S, L)⊗ H2−i(S, ωS ⊗ L−1) → H2(S, ωS) ∼= C

A.2 Serre e Riemann-Roch 117
definisce una dualita, cioe
Hi(S, L) ∼= H2−i(S, ωS ⊗ L−1).
In particolareχ(L) = χ(ωS ⊗ L−1).
Eccoci pronti per il teorema di Riemann-Roch per le superficie.
Teorema A.2.2 (Teorema di Riemann-Roch). Nella situazione precedentemente de-scritta, per ogni L ∈ Pic(S)
χ(L) = χ(OS) +12(L · L− L ·ωS).
Dimostrazione. Calcoliamo. Dalla definizione di intersezione, abbiamo che
(L−1 · L⊗ω−1S ) = χ(OS)− χ(L)− χ(ωS ⊗ L−1) + χ(ωS).
Ma grazie all’ultima osservazione del teorema precedente, sappiamo che χ(ωS) =χ(OS) e che χ(ωS ⊗ L−1) = χ(L). Infatti posto ad esempio L = OS otteniamoche
χ(OS) = χ(ωS ⊗O−1S ) = χ(ωS ⊗OS) = χ(ωS).
Continuando il conto sull’intersezione otteniamo quindi che
(L−1 · L⊗ω−1S ) = 2(χ(OS)− χ(L))
Passando in notazione additiva, abbiamo
−L · (L−ωS) = 2χ(OS)− 2χ(L)12 (−L2 + L ·ωS) = χ(OS)− χ(L)
da cui segue
χ(L) = χ(OS) +12(L · L− L ·ωS).
Alcune osservazioni prima di concludere. Considerato K il divisore canonico,cioe un divisore tale che K = OS(ωS), la dualita di Serre afferma che hi(D) =h2−i(K − D). Dal momento che χ(L) = h0(L) − h1(L) + h2(L), il teorema diRiemann-Roch afferma che
h0(D)− h1(D) + h2(D) = χ(OS) + 12 (D2 − D · K)
h0(D)− h1(D) + h0(K− D) = χ(OS) + 12 (D2 − D · K)
da cui otteniamo l’utile disuguaglianza
h0(D) + h0(K− D) > χ(OS) +12(D2 − D · K).

Appendice B
MMP e la classificazione dellesuperficie
Vediamo, in questo breve riassunto, come il MMP puo essere d’aiuto per af-frontare il problema della classificazione delle superficie. Gli strumenti che uti-lizzeremo sono principalmente la dimensione di Kodaira e, vero protagonista, ildivisore canonico.
Il nostro scopo e quindi recuperare una classificazione birazionale delle su-perficie ponendosi nel caso in cui il campo scelto come ambiente di lavoro siaC; senza porre l’accento sui dettagli, cerchiamo di capire il modo in cui MMPfunziona e si adatta al caso bidimensionale.
Consideriamo una superficie X; in virtu dei teoremi di risoluzione di singo-larita, possiamo supporre che X sia liscia.
Procedeno a considerare e valutare la nostra stella KX , abbiamo due possi-bilita: KX e nef o KX non e nef.
B.1 KX non e nef
In questa situazione, in virtu del Teorema del Cono, accade che in NE(X) cisono raggi estremali negativi che possono essere contratti: cerchiamo dunque dicontrarre un raggio alla volta.
Fissato un raggio estremale, avremo che questo sara generato da una curvarazionale C ⊂ X. Possiamo quindi costruire una contrazione
ϕ : X → X′
per la quale abbiamo varie possiilita:

B.2 KX e nef 119
1. dimX′ = 2. La ϕ e birazionale e accade che ϕ e un blow-down di X checontrae la curva C. Si ha quindi che X = BxX′ per qualche x ∈ X′ e C e lacurva eccezionale del blow-up.
2. dimX′ = 1. Le fibre della mappa ϕ hanno dimensione 1; si ha dunque chela varieta X′ risulta essere una curva proiettiva liscia e le fibre della mappasono copie di CP1. La varieta di partenza puo essere quindi pensata comefibrato proiettivo su X′ e X come superficie rigata.
3. dimX′ = 0. La mappa ϕ e la mappa costante su un punto e dal momentoche ogni curva su X risulta essere contratta, il Numero di Picard e 1 e X euna Varieta di Fano (Fibrato anticanonico Ampio): X ∼= CP2.
Riassumendo, ecco quindi quello che succede.
Fatto B.1.1. Presa una varieta liscia tale che KX non e nef, con una sequeza di blow-uplungo curve eccezionali, si produce una mappa
ϕ : X → X
e si possono presentare questi casi.
(a) KX e nef.
(b) X → B birazionale con B superficie rigata.
(c) X ∼= CP2.
Dopo che il MMP ha fatto il suo lavoro, ci siamo quindi ricondotti all’altrocaso. Problema: cosa accade quando KX e nef?
B.2 KX e nef
Ricordiamo che data una varieta X e possibile costruire una successione di in-varianti birazionali: l’n-esimo plurigenere
Pn(X) = h0(V, Kn) = dim H0(X, nKX).
Il divisore pluricanonico nKX permette inoltre di definire una mappa su PPn(X)−1
detta n-esima mappa canonica.Tornando alla classificazione, si puo suddividere lo studio in vari casi utiliz-
zando la dimensione di Kodaira κ(X) della varieta in questione.La dimensione di Kodaira κ(X) puo essere definita in vari modi equivalenti:
• la dimensione di Proj(R) dove R e l’anello canonico associato alla varieta;

B.2 KX e nef 120
• la dimensione dell’immagine della n-esima mappa canonica per n suffi-cientemente grande, cioe la dimensione della varieta di Itaka I(X);
• ll grado di trascendenza di R diminuito di 1;
• il tasso di crescita del plurigenere, cioe il piu piccolo intero κ per cuiPn(X)/nκ e limitato.
Nel caso delle superficie le possibilta sono: κ = −∞, 0, 1, 2.
Fatto B.2.1. Nei casi (b) e (c) del Fatto B.1.1 si ha che κ(X) = −1.
Dimostrazione. Si ha infatti che nel caso (b) X e birazionalmente equivalente aP1 ×C e siccome Pm(CPn) = 0 per tutti gli m e vale Pm(X×Y) = Pm(X) · Pm(Y),si ha che I(X) e vuota e κ(X) = −1.
Nel caso (c) si ha direttamente che X birazionale a CP2 e quindi, come noto,tutti i plurigeneri si annullano.
Teorema B.2.2. Per una superficie proiettiva liscia X, T.F.A.E.:
1. X e coperta da curve razionali;
2. X e birazionalmente rigata (X ∼= E×P1 per qualche curva E);
3. Pm(X) = 0 per ogni m,
4. P12 = 0.
In virtu di questo teorema e del Fatto precedente si ha quindi che siccome lesuperficie birazionalmente rigate hanno dimensione di Kodaira negativa, il casoκ = −∞ e completamente descritto dai casi (b) e (c) del Fatto B.1.1.
Teorema B.2.3. Se KX e nef, allora X non e birazionalmente rigata.
Siamo dunque nella situazione di KX nef e di I(X) definita a meno di isomor-fismo. In base ai valori non negativi di κ(X) abbiamo vari casi:
0 In questo caso I(X) = punto e si ha che κ = 0 se e solo se KX ∼ 0.C’e una lista di queste varieta: superficie Abeliane, superficie K3, superfi-cie di Enriques, certi Z2−quozienti, superficie iperellittiche, . . . Per ulterioridettagli rimandiamo a [Bea96].
1 Questo e il caso in cui I(X) e una curva, la mappa X → I(X) risulta averequasi tutte le fibre composte da curve ellittiche: X e una superficie ellittica.Siamo nella situazione in cui 2KX = 0 ma KX non e sempre nullo.

B.2 KX e nef 121
2 Si ha che I(X) ha dimensione 2 e ha singolarita canoniche: la mappa X →I(X) e birazionale. Siamo nel caso in cui 2KX > 0. Abbiamo una formulache permette di calcolare il plurigenere:
Pm(X) =(
m(m− 1)2
+112
)KX · KX +
112
χ(X),
per m > 2 e dove χ(X) e la caratteristica di Eulero.
Bibliografia
[BCHM06] Caucher Birkar, Paolo Cascini, Christopher Hacon, and James McK-ernan, Existence of minimal models for varieties of log general type,2006.
[Bea96] Arnaud Beauville, Complex algebraic surfaces, second ed., LondonMathematical Society Student Texts, vol. 34, Cambridge UniversityPress, Cambridge, 1996, Translated from the 1978 French original byR. Barlow, with assistance from N. I. Shepherd-Barron and M. Reid.
[CCJ+05] Charles Cadman, Izzet Coskun, Kelly Jabbusch, Michael Joyce,Sandor J. Kovacs, Max Lieblich, Fumitoshi Sato, Matt Szczesny, andJing Zhang, A first glimpse at the minimal model program, Snowbird lec-tures in algebraic geometry, Contemp. Math., vol. 388, Amer. Math.Soc., Providence, RI, 2005, pp. 17–42.
[Deb01] Olivier Debarre, Higher-dimensional algebraic geometry, Universitext,Springer-Verlag, New York, 2001.
[GH94] Phillip Griffiths and Joseph Harris, Principles of algebraic geometry, Wi-ley Classics Library, John Wiley & Sons Inc., New York, 1994, Reprintof the 1978 original.
[Gra08] Antonella Grassi, Birational geometry. old and new, 2008.
[Hac08] Christopher Hacon, Finite generation of canonical rings iii, 2008.
[Har77] Robin Hartshorne, Algebraic geometry, Springer-Verlag, New York,1977, Graduate Texts in Mathematics, No. 52.
[Kaw] Yujiro Kawamata, Flops connect minimal models, arXiv:alg-geom/07041013.

Bibliografia 123
[KM98] Janos Kollar and Shigefumi Mori, Birational geometry of algebraic vari-eties, Cambridge Tracts in Mathematics, vol. 134, Cambridge Univer-sity Press, Cambridge, 1998, With the collaboration of C. H. Clemensand A. Corti, Translated from the 1998 Japanese original.
[Kol87] Janos Kollar, The structure of algebraic threefolds: an introduction toMori’s program, Bull. Amer. Math. Soc. (N.S.) 17 (1987), no. 2, 211–273.
[Kol07] , What is . . . a minimal model?, Notices Amer. Math. Soc. 54(2007), no. 3, 370–371.
[Mor82] Shigefumi Mori, Threefolds whose canonical bundles are not numericallyeffective, Ann. of Math. (2) 116 (1982), no. 1, 133–176. MR MR662120(84e:14032)
[Mor88] , Flip theorem and the existence of minimal models for 3-folds, J.Amer. Math. Soc. 1 (1988), no. 1, 117–253. MR MR924704 (89a:14048)
[Mor07] , Recent progress in higher dimentional algebraic geometry 1, ClayResearch Conference, 2007.
[Oss] Brian Osserman, A brief sketch of the minimal model program.
[Rei88] Miles Reid, Undergraduate algebraic geometry, London Mathemat-ical Society Student Texts, vol. 12, Cambridge University Press,Cambridge, 1988.
[Rei97] , Chapters on algebraic surfaces, Complex algebraic geometry(Park City, UT, 1993), IAS/Park City Math. Ser., vol. 3, Amer. Math.Soc., Providence, RI, 1997, pp. 3–159.
[Rei00] , Twenty-five years of 3-folds—an old person’s view, Explicit bira-tional geometry of 3-folds, London Math. Soc. Lecture Note Ser., vol.281, Cambridge Univ. Press, Cambridge, 2000, pp. 313–343.
[Rei02] , Update on 3-folds, Proceedings of the International Congressof Mathematicians, Vol. II (Beijing, 2002) (Beijing), Higher Ed. Press,2002, pp. 513–524.
[Sha74] Igor R. Shafarevich, Basic algebraic geometry, Springer-Verlag, NewYork, 1974, Translated from the Russian by K. A. Hirsch, DieGrundlehren der mathematischen Wissenschaften, Band 213.
[Tot07] Burt Totaro, Euler and algebraic geometry, Bull. Amer. Math. Soc. (N.S.)44 (2007), no. 4, 541–559 (electronic).

. . . e come si esplicita il passaggiodalle varieta algebriche ai coni associati?
Io non cerco di esplicitare il processo intermedio.D’altronde, Picasso non spiegava perche disegnasse
una persona con una testa piramidale o un naso a cono:questi sono fatti dell’artista,
e non devono interessare chi guarda il quadro.
(Shigefumi Mori)