tematy projektu dyplomowego inżynierskiego 2016 projektów... · 3. s. orłowski, c#. tworzenie...
TRANSCRIPT

Tematy projektu dyplomowego inżynierskiego 2016
1.
Temat projektu/pracy
dyplomowej
inżynierskiej (jęz. pol.)
Eliminacja zakłóceń impulsowych z archiwalnych nagrań
fonicznych przy użyciu dwukierunkowego przetwarzania sygnału
Temat projektu/pracy
dyplomowej
inżynierskiej (jęz. ang.)
Elimination of impulsive disturbances from archive audio signals
using bidirectional processing
Opiekun pracy mgr inż. Marcin Ciołek
Konsultant pracy
Cel pracy Celem projektu jest implementacja algorytmu eliminacji zakłóceń
impulsowych z archiwalnych nagrań fonicznych.
Zadania do wykonania 1. Implementacja metody eliminacji zakłóceń impulsowych z
archiwalnych nagrań fonicznych w języku C++
2. Przeprowadzenie testów oceniających skuteczność działania
algorytmu.
3. Przygotowanie interfejsu graficznego.
4. Przygotowanie dokumentacji technicznej.
Źródła M. Niedźwiecki, M. Ciołek, Elimination of impulsive disturbances
from archive audio signals using bidirectional processing, IEEE
Trans. Audio, Speech, Language Process. 21 (5) (2013) 1046–1059.
Liczba wykonawców 1
Uwagi
2.
Temat projektu/pracy
dyplomowej
inżynierskiej (jęz. pol.)
Eliminacja zakłóceń impulsowych z archiwalnych nagrań
fonicznych przy użyciu wektorowego modelowania
autoregresyjnego i filtracji Kalmana o zmiennym rzędzie
Temat projektu/pracy
dyplomowej
inżynierskiej (jęz. ang.)
Elimination of impulsive disturbances from stereo audio
recordings using vector autoregressive modelling and variable-
order Kalman filtering
Opiekun pracy mgr inż. Marcin Ciołek
Konsultant pracy
Cel pracy Celem projektu jest implementacja metody eliminacji zakłóceń
impulsowych z archiwalnych nagrań fonicznych.
Zadania do wykonania 1. Implementacja metody eliminacji zakłóceń impulsowych z
archiwalnych nagrań fonicznych w języku C++
2. Przeprowadzenie testów oceniających skuteczność działania
algorytmu.
3. Przygotowanie interfejsu graficznego.
4. Przygotowanie dokumentacji technicznej.
Źródła M. Niedźwiecki, M. Ciołek, K. Cisowski, Elimination of impulsive
disturbances from stereo audio recordings using vector autoregressive
modeling and variable-order Kalman filtering, IEEE Trans. Audio,
Speech, Language Process. 23 (6) (2015) 970–981.
Liczba wykonawców 1
Uwagi
3.
Temat projektu/pracy
dyplomowej
inżynierskiej (jęz. pol.)
Eliminacja zakłóceń impulsowych z archiwalnych nagrań
fonicznych przy użyciu techniki filtracji dopasowywanej
Temat projektu/pracy
dyplomowej
inżynierskiej (jęz. ang.)
Elimination of impulsive disturbances from audio signals using
the
template matching technique
Opiekun pracy mgr inż. Marcin Ciołek
Konsultant pracy
Cel pracy Celem projektu jest implementacja metody eliminacji zakłóceń
impulsowych z archiwalnych nagrań fonicznych.
Zadania do wykonania 1. Implementacja metody eliminacji zakłóceń impulsowych z
archiwalnych nagrań fonicznych w języku C++
2. Przeprowadzenie testów oceniających skuteczność działania
algorytmu.
3. Przygotowanie interfejsu graficznego.
4. Przygotowanie dokumentacji technicznej.
Źródła M. Niedźwiecki, M. Ciołek, Localization of impulsive disturbances in
audio signals using template matching, Digital Signal Processing 46
(11) (2015) 253–265.
Liczba wykonawców 1
Uwagi
4.
Temat projektu/pracy
dyplomowej
inżynierskiej (jęz. pol.)
Analiza oddechu zarejestrowanego podczas snu u osób
cierpiących na bezdech senny
Temat projektu/pracy
dyplomowej
inżynierskiej (jęz. ang.)
The analysis of an airflow signal recorded during sleep in people
suffering from sleep apnea.
Opiekun pracy mgr inż. Marcin Ciołek
Konsultant pracy
Cel pracy Celem projektu jest przeprowadzenie pomiarów oddechu, a następnie
przeanalizowanie zarejestrowanego sygnału w sposób pozwalający na
wykrycie epizodów spłycenia oddechu i bezdechu sennego.
Zadania do wykonania 1. Zapoznanie się z problemem bezdechu sennego
2. Pomiar oddechu przy użyciu czujnika ciśnienia MS-5701
3. Opracowanie algorytmu przetwarzania sygnału przepływu
powietrza w sposób pozwalający na wykrycie epizodów
spłycenia oddechu i bezdechu sennego.
4. Przygotowanie aplikacji do wizualizacji zapisanych danych
5. Przygotowanie dokumentacji technicznej
Źródła Ciołek, M.; Niedźwiecki, M.; Sieklicki, S.; Drozdowski, J.; Siebert, J.
Automated Detection of Sleep Apnea and Hypopnea Events Based on
Robust Airflow Envelope Tracking in the Presence of Breathing
Artifacts
IEEE Journal of Biomedical and Health Informatics , vol. 19, no. 2,
2015, str. 418-429
Liczba wykonawców 1
Uwagi
5.
Temat projektu/pracy
dyplomowej
inżynierskiej (jęz. pol.)
Balansujący dwukołowy robot mobilny
Temat projektu/pracy
dyplomowej
inżynierskiej (jęz. ang.)
A self-balancing two-wheeled mobile robot
Opiekun pracy mgr inż. Marcin Ciołek
Konsultant pracy
Cel pracy Celem projektu jest wykonanie balansującego dwukołowego robota
mobilnego
Zadania do wykonania 1. Projekt robota mobilnego
2. Budowa robota mobilnego
3. Opracowanie algorytmu sterowania robotem
4. Przeprowadzenie testów sprawdzających działanie robota
5. Przygotowanie dokumentacji technicznej
Źródła
Liczba wykonawców 1
Uwagi
6.
Temat projektu/pracy
dyplomowej
inżynierskiej (jęz. pol.)
Model stanowiska laboratoryjnego do badania pasywnych metod
tłumienia drgań
Temat projektu/pracy
dyplomowej
inżynierskiej (jęz. ang.)
Model of laboratory system for testing of passive methods of
vibration damping
Opiekun pracy Dr inż. Krzysztof Cisowski
Konsultant pracy
Cel pracy Zaprojektowanie i budowa stanowiska laboratoryjnego służącego do
demonstracji własności tłumiących wybranych materiałów
izolacyjnych. System sterująco-pomiarowy powinien zostać oparty o
zestaw uruchomieniowy procesora sygnałowego Texas Instruments
serii TMS320C6XXX.
Zadania do wykonania 1. Opracowanie i realizacja części mechanicznej stanowiska
laboratoryjnego.
2. Opracowanie i implementacja na procesorze sygnałowym
algorytmów sterowania wzbudnikem stolika wibracyjnego.
3. Opracowanie i implementacja na procesorze sygnałowym
algorytmów części pomiarowej systemu.
4. Realizacja interfejsu użytkownika
Źródła 1. Dokumentacja zestawu uruchomieniowego Spectrum Digital dla
procesora sygnałowego Texas Instruments TMS320C6713.
2. Z. Osiński, Tłumienie drgań, Wydawnictwo Naukowe PWN 1997.
Liczba wykonawców 2
Uwagi Narzędzia programistyczne: MATLAB, TI Code Composer Studio 4.0, MS Visual Studio

7.
Temat projektu/pracy
dyplomowej
inżynierskiej (jęz. pol.)
Intranetowy studyjny video interkom
Temat projektu/pracy
dyplomowej
inżynierskiej (jęz. ang.)
Intranet studio video interkom
Opiekun pracy Dr inż. Krzysztof Cisowski
Konsultant pracy
Cel pracy Opracowanie koncepcji oraz realizacja cyfrowego systemu łączności
wizyjno-fonicznej w studiu nagrań poprzez lokalną sieć Intranetu.
Zadania do wykonania 1. Opracowanie koncepcji systemu
2. Implementacja na komputerach PC oprogramowania
komunikacyjnego użytkowników końcowych oraz centrali sterującej.
3. Realizacja interfejsów użytkownika.
Źródła 1. Materiały reklamowe firmy BEL AQUSTIC -
Interkom_przez_Ethernet_ta2000.pdf.
2. B. Sosiński, Sieci komputerowe. Biblia, Helion 2011/05
3. S. Orłowski, C#. Tworzenie aplikacji sieciowych. 101 gotowych
projektów, Helion 2006/12.
4. Marcin Radacz, projekt dyplomowy inżynierski, KSA WETiI,
„Video interkom studyjny z łącznością poprzez Intranet/Internet”
2014.
Liczba wykonawców 2
Uwagi Narzędzia programistyczne: MS Visual Studio, Java.

8.
Temat projektu/pracy
dyplomowej
inżynierskiej (jęz. pol.)
Zastosowanie mikromodułu MMnet1002 firmy Propox do
budowy uniwersalnego modułu diagnostyczno-pomiarowego
Temat projektu/pracy
dyplomowej
inżynierskiej (jęz. ang.)
Application of the Propox MMnet1002 module for designing
universal monitoring and measurement unit
Opiekun pracy Dr inż. Krzysztof Cisowski
Konsultant pracy
Cel pracy Celem pracy jest zaprojektowanie oraz zbudowanie prototypu
uniwersalnego modułu pomiarowego służącego do zbierania i
wstępnej analizy sygnałów cyfrowych pochodzących z wybranego
zbioru czujników pomiarowych (temperatury, ciśnienia, drgań,
położenia itp.). Zaprojektowany układ będzie wykorzystywał
mikromodułu MMnet1002 firmy Propox oparty na mikrokontrolerze
AT91SAM9260 (z 32 bitowym rdzeniem ARM926EJ).
Zadaniem modułu będzie oprócz akwizycji danych, ich wstępna
obróbka poprzez zastosowanie np. filtracji cyfrowej sygnału lub
segmentacji. Moduł będzie komunikował się z macierzystym
komputerem PC za pomocą wbudowanego łącza ethernetowego.
Zadaniem komputera będzie bardziej zaawansowane, w porównaniu z
modułem pomiarowym, przetwarzanie danych i wizualizacja
uzyskanych efektów obliczeń. Komputer pełniący rolę serwera będzie
miał możliwość komunikacji z wieloma modułami pomiarowymi.
Zadania do wykonania 1. Opracowanie i implementacja na mikromodule MMnet1002
oprogramowania sterującego pracą czujników i komunikacją z
komputerem PC oraz algorytmów wstępnego przetwarzania danych.
2. Realizacja na komputerze PC interfejsu użytkownika oraz
algorytmów przetwarzania i wizualizacji danych.
Źródła 1. ŻÓŁTOWSKI B., CEMPEL C. (red.): Inżynieria Diagnostyki
Maszyn, praca zbiorowa., PTDT ITE PIB Radom, Warszawa,
Bydgoszcz, Radom 2004.
2. Dokumentacja mikromodułu MMnet1002.
3. Piotr Kira, Krzysztof Pupowski, Praca dyplomowa magisterska
KSA WETiI, „Uniwersalny moduł kontrolno-pomiarowy”, 2012.
Liczba wykonawców 2
Uwagi Narzędzia programistyczne: MATLAB, MS Visual Studio, środowisko programistyczne mikromodułu Mmnet1002 dla systemu Linux Ubuntu.
9.
Temat projektu/pracy
dyplomowej
inżynierskiej (jęz. pol.)
Tłumienie zakłóceń szerokopasmowych w dukcie akustycznym z
wykorzystaniem algorytmu FxLMS zaimplementowanego na
stałoprzecinkowym procesorze sygnałowym TMS320C5515
Temat projektu/pracy
dyplomowej
inżynierskiej (jęz. ang.)
Attenuation of broadband noise in acoustic duct using FxLMS
algorithm implemented on fixed point DSP processor
TMS320C5515
Opiekun pracy Dr inż. Krzysztof Cisowski
Konsultant pracy
Cel pracy Celem pracy jest projekt oraz realizacja w oparciu o
DSK procesora sygnałowego Texas Instruments TMS320C5515
laboratoryjnego systemu służącego do tłumienia na wylocie duktu
akustycznego, szumu szerokopasmowego wytwarzanego przez
wentylator systemu klimatyzacyjnego. Proponowany algorytm
FxLMS wymaga oprócz pomiaru tzw. sygnału błędu (na końcu
duktu), pomiaru sygnału w bezpośrednim sąsiedztwie źródła
zakłóceń – sygnału referencyjnego. W proponowanym rozwiązaniu
pomiar ten odbywać się będzie za pomocą akcelerometru (zamiast
mikrofonu) co pozwoli zredukować efekt niekorzystnego sprzężenia
zwrotnego z wyjścia systemu do miejsca pomiaru sygnału
referencyjnego. W pracy zostanie wykorzystany istniejący w
Katedrze Systemów Automatyki model systemu wentylacyjnego.
Zadania do wykonania 1. Opracowanie i implementacja na DSK TMS320C5515
oprogramowania FxLMS.
2. Przeprowadzenie badań własności opracowanego systemu z
wykorzystaniem TI Code Composer Studio 4.0.
3. Realizacja na komputerze PC interfejsu użytkownika służącego do
sterowania parametrami algorytmu w czasie rzeczywistym oraz
wizualizacji danych i uzyskanych rezultatów.
Źródła 1. Design of active noise control systems with the TMS320 family,
Application Report, Texas Instruments SPRA042.
2. NIEDŹWIECKI MACIEJ, MELLER MICHAŁ: A new approach
to active noise and vibration control – Part I: the known frequency
case, IEEE Transaction on Signal Processing, Vol. 57, No. 9, str.
3373-3386.
3. Szymon Scharmach, Praca dyplomowa magisterska KSA WETiI,
„Systemy aktywnego tłumienia zakłóceń w dukcie akustycznym”,
2011.
4. Rafael Cierpka, Projekt dyplomowy inżynierski KSA WETiI,
„Active noise control in a standard HVAC duct”, 2012.
5. Dokumentacja zestawu DSK: TMS320C5515 eZdsp USB Stick
(TMDX5515EZDSP).
Liczba wykonawców 2
Uwagi Narzędzia programistyczne: TI Code Composer Studio 4.0, MATLAB, MS Visual Studio.

10.
Temat projektu/pracy
dyplomowej
inżynierskiej (jęz. pol.)
Miernik poziomu dźwięku oparty na procesorze sygnałowym
Temat projektu/pracy
dyplomowej
inżynierskiej (jęz. ang.)
DSP based sound level meter
Opiekun pracy Dr inż. Krzysztof Cisowski
Konsultant pracy
Cel pracy Celem pracy jest zaprojektowanie i realizacja w oparciu o
DSK stałoprzecinkowego procesora sygnałowego Texas Instruments
TMS320C5515 miernika poziomu dźwięku. Urządzenie to powinno
pozwalać między innymi na obliczanie chwilowej, minimalnej i
maksymalnej wartości skutecznej (RMS) z użyciem stałej czasowej
FAST (1 s.), SLOW (125 ms.) oraz IMPULSE (35 ms.); chwilowej,
minimalnej i maksymalnej wartości szczytowej (Peak); wartości
równoważnej poziomu dźwięku. Sygnały wejściowe powinny być
formowane za pomocą filtrów wagowych A, B, C, D lub
przetwarzane z pominięciem filtracji wstępnej. Układ powinien
również posiadać funkcję analizatora oktawowego oraz analizatora
1/3-oktawowego w zakresie 31,5 Hz do 16 kHz. Dla każdej z
częstotliwości powinien być możliwy pomiar chwilowej wartości
skutecznej z użyciem stałej czasowej FAST lub SLOW oraz wartości
równoważnej poziomu dźwięku. Urządzenie powinno wyświetlać
obliczone wartości poziomu sygnału na graficznym wyświetlaczu
LCD jak również umożliwiać prezentację zgromadzonych danych
pomiarowych na komputerze PC.
Zadania do wykonania 1. Opracowanie koncepcji miernika poziomu dźwięku.
2. Zaprojektowanie cyfrowych filtrów wagowych A, B, C, D, oraz
filtrów oktawowych i 1/3-oktawowych.
3. Opracowanie i realizacja oprogramowania dla DSK procesora
sygnałowego (TI Code Composer Studio 4.0) realizującego
wszystkie funkcje miernika poziomu dźwięku.
4. Opracowanie i realizacja interfejsu użytkownika służącego do
gromadzenia i wizualizacji danych pomiarowych (język Visual
C++, C# lub JAVA).
Źródła 1. Zbigniew Żyszkowski, „Miernictwo akustyczne”, WNT 1987.
2. Materiały szkoleniowe firmy Bruel&Kjaer, „Application of B&K
Equipment to Acoustic Noise Measurements”, ISBN 87 87355 00
0,
1973.
3. Dokumentacja zestawu DSK: TMS320C5515 eZdsp USB Stick
(TMDX5515EZDSP).
Liczba wykonawców 2
Uwagi Narzędzia programistyczne: TI Code Composer Studio 4.0, MATLAB, MS Visual Studio.

11.
Temat projektu/pracy
dyplomowej
inżynierskiej (jęz. pol.)
Wykonywanie rysunków wektorowych przy użyciu robota
przemysłowego.
Temat projektu/pracy
dyplomowej
inżynierskiej (jęz. ang.)
Making vector drawings using an industrial robot
Opiekun pracy dr inż. Piotr Fiertek
Konsultant pracy
Cel pracy Opracowanie programu na komputer PC oraz programu sterującego
robotem przemysłowym Kawasaki, realizującego odtworzenie przez
robota zadanego rysunku. Program na PC powinien umożliwiać
importowanie (z innego programu graficznego) i edycję rysunku
wektorowego, który następnie, w postaci ciągu instrukcji, przesyłany
jest do robota przemysłowego Kawasaki. Robot na podstawie
otrzymanych instrukcji powinien odtworzyć rysunek na kartce
papieru za pomocą zamontowanych na jego ramieniu pisaków.
Praca robota powinna zostać wstrzymana po wykryciu ruchu
człowieka w obszarze roboczym. Wykrywanie obiektów obcych w
polu roboczym robota realizowane jest poprzez odpowiednie
przetworzenie danych pochodzących z urządzenia Kinect.
Zadania do wykonania 1. Napisanie programu na PC (C++ lub C#) realizującego edycję
rysunku wektorowego oraz zamianę rysunku na ciąg instrukcji
przesyłanych do robota przemysłowego.
2. Implementacja komunikacji miedzy komputerem PC a robotem
przemysłowym.
3. Napisanie programu sterującego robotem.
4. Opracowanie systemu natychmiastowego zatrzymania robota po
wykryciu dowolnego obcego obiektu w polu roboczym robota.
Otoczenie robota monitorowane ma być za pomocą urządzenia
Kinect. Należy opracować algorytm przetwarzania otrzymanej z
urządzenia Kinect chmury punktów.
5. Kalibracja układu współrzędnych kartki oraz położenia pisaków
względem flanszy robota (odpowiednie procedury kalibracyjne
dla robota Kawasaki są dostępne z poziomu interfejsu robota).
Źródła 1. Bruce Eckel, Thinking In C++, Januar 2000
2. Dokumentacja do robotów Kawasaki
Liczba wykonawców 2
Uwagi Wymagana dobra znajomość programowania w C++ Temat zarezerwowany
12.
Temat projektu/pracy
dyplomowej
inżynierskiej (jęz. pol.)
Wirtualne laboratorium robotów przemysłowych
Temat projektu/pracy
dyplomowej
inżynierskiej (jęz. ang.)
Virtual Laboratory of Industrial Robots
Opiekun pracy dr inż. Piotr Fiertek
Konsultant pracy
Cel pracy Opracowanie wirtualnego laboratorium robotów przemysłowych,
zawierających trójwymiarowe modele robotów dostępnych w pracowni współpracy robotów przemysłowych.
Wirtualne laboratorium robotów powinno umożliwiać sterowanie
ruchem symulowanych robotów: sterowanie wirtualnym chwytakiem,
przemieszczanie elementów w wirtualnym środowisku (pobieranie klocków, puszczanie klocków).
Ważnym składnikiem wirtualnego laboratorium jest edytor programu
robota, w którym należy zdefiniować szereg podstawowych operacji
wykonywanych przez robota: definicja podstawowych zmiennych,
instrukcje FOR, IF, instrukcje ruchu, definicja układu współrzędnych,
definicja narzędzia robota, instrukcje zamknięcia i otwarcia chwytaka.
Zakłada się konieczność zdefiniowania własnego zestawu instrukcji,
pozwalających na realizację prostych zadań. Ze względu na
złożoność zagadnienia nie jest przewidziane odtworzenie działania
całego języka programowania robotów Kawasaki (język AS) lub
robotów Mitsubishi (język Melfa Basic). Podczas modelowania ruchu
manipulatora robota zakłada się odtworzenie jedynie kinematyki
ruchu. Kwestie związane z dynamiką ruchu manipulatora nie muszą być rozpatrywane.
Zadania do wykonania 1. Opracowanie wirtualnego środowiska robota (wraz z edytorem
umożliwiającym umieszczenie w otoczeniu robota
predefiniowanych elementów, którymi robot mógłby
manipulować)
2. Opracowanie edytora programu robota wraz z interpreterem
poleceń.
3. Opis trzech różnych ćwiczeń laboratoryjnych dla studentów
4. Opracowanie dokumentacji oraz instrukcji użytkownika.
Źródła 1. Thinking in C++, Bruce Eckel, January 13, 2000
Liczba wykonawców 2
Uwagi Wymagana jest dobra umiejętność programowania w C++
13.
Temat projektu/pracy
dyplomowej
inżynierskiej (jęz. pol.)
Projekt i realizacja transportowego robota kroczącego typu
hexapod
Temat projektu/pracy
dyplomowej
inżynierskiej (jęz. ang.)
Design and Implementation of a Hexapod Transporter Robot.
Opiekun pracy dr inż. Piotr Fiertek
Konsultant pracy
Cel pracy Celem pracy jest zbudowanie robota kroczącego typu hexapod,
którego zadaniem będzie eksploracja otoczenia w celu wykrycia
interesujących nas obiektów i przetransportowania ich do punktu
docelowego. Nie narzuca się rodzaju czujników w jakie ma być
wyposażony robot kroczący (pozostawia się swobodę decyzji
realizatorom projektu), tym niemniej proponowanym czujnikiem
służącym do rozpoznawania otoczenia robota jest system wizyjny.
Szukane obiekty mogą być np. piłkami określonego koloru i
rozmiaru, natomiast punkt docelowy (do którego należy
przetransportować znalezione obiekty) może być oznaczony za
pomocą kolorowego markera.
Nie narzuca się również sposobu pobierania obiektów z otoczenia.
Robot może być wyposażony w dodatkowy manipulator, którego
zadaniem jest pobieranie obiektów z podłogi i umieszczanie ich w
koszu umieszczonym na górnej powierzchni robota. W prostszym
układzie wystarczą proste chwytaki pobierające i przytrzymujące
znalezione obiekty, bez konieczności odkładania ich na grzbiet
robota.
Zadania do wykonania 1. Wykonanie projektu robota i wykonanie jego fizycznej budowy.
2. Zaprogramowanie chodu robota (ruch do przodu, do tyłu,
obracanie się).
3. Obsługa czujników zamontowanych na pokładzie robota (np.
czujnik wizyjny) służących do wykrywania transportowanych
obiektów.
4. Napisanie sekwencji sterujących robotem, realizujących
wykrywanie obiektów w otoczeniu robota, pobieranie obiektów i
przetransportowanie ich w docelowe miejsce.
Źródła 1. Thinking in C++, Bruce Eckel, January 13, 2000
2. Digital Image Processing, William K. Pratt, 2007
Liczba wykonawców 2
Uwagi Narzędzia programistyczne: Visual Studio, środowiska do programowania robotów przemysłowych Temat zarezerwowany
14.
Temat projektu/pracy
dyplomowej
inżynierskiej (jęz. pol.)
Platforma strzelecka z zamontowaną bronią ASG
Temat projektu/pracy
dyplomowej
inżynierskiej (jęz. ang.)
Shooting platform for ASG weapons
Opiekun pracy dr inż. Piotr Fiertek
Konsultant pracy
Cel pracy Celem pracy jest zbudowanie platformy strzeleckiej na której
umieszczona byłaby broń ASG. Platforma sterowana ma być za
pomocą serw modelarskich. Do namierzania obiektów
wykorzystywany ma być sensor Kinect. Do sterowania serwami
można wykorzystać mikrokontroler Atmega8 (komunikacja z
komputerem PC za pomocą interfejsu USB).
Zadania do wykonania 1. Zaprojektowanie i zbudowanie platformy strzeleckiej.
2. Opanowanie sterowania platformą z poziomu komputera PC
3. Opracowanie i implementacja algorytmów wykrywających
zestrzeliwane obiekty (przy wykorzystaniu funkcji z biblioteki
OpenCV). Wykrywanymi obiektami są proste obiekty (np. okrągłe
znaczniki danego koloru).
4. Wykorzystanie danych 3D z sensora Kinect.
5. Opracowanie algorytmów śledzenia ruchomych obiektów.
Źródła 1. Thinking in C++, Bruce Eckel, January 13, 2000
2. Learning OpenCV, praca zbiorowa, O'Reilly Media
Liczba wykonawców 2
Uwagi Wymagana jest dobra umiejętność programowania w C++ Temat zarezerwowany
15.
Temat projektu/pracy
dyplomowej
inżynierskiej (jęz. pol.)
Zdalnie sterowany robot zbudowany przy wykorzystaniu
Raspberry Pi 2
Temat projektu/pracy
dyplomowej
inżynierskiej (jęz. ang.)
Remote-controlled robot built using Raspberry Pi 2
Opiekun pracy dr inż. Piotr Fiertek
Konsultant pracy
Cel pracy Celem pracy jest budowa zdalnie sterowanego robota pozwalającego
na inspekcję trudno dostępnych miejsc. Powstały robot mobilny oraz
głowica poruszająca kamerą zamontowaną na korpusie robota
powinny być sterowane zdalnie z klawiatury. Włączanie i wyłączanie
oświetlenia zamontowanego na robocie również powinno być
realizowane zdalnie.
Zadania do wykonania
Źródła Robot powinien być wyposażony w czujniki odległości (np. czujniki
ultradźwiękowe) wykrywające przeszkody w jego otoczeniu.
Wykrycie przeszkód powinno uniemożliwiać robotowi najechanie na
przeszkody (pomimo manualnego trybu sterowania robotem). Stan
czujników powinien być wyświetlany na panelu sterującym robotem.
Liczba wykonawców 1
Uwagi Temat zarezerwowany
16.
Temat projektu/pracy
dyplomowej
inżynierskiej (jęz. pol.)
Projekt i budowa robota o konstrukcji równoległej (pięcioboku
przegubowego) do kreślenia zadanych trajektorii.
Temat projektu/pracy
dyplomowej
inżynierskiej (jęz. ang.)
Design and construction of a parallel robot (five-bar linkage) for
drawing specific trajectories
Opiekun pracy dr inż. Piotr Fiertek
Konsultant pracy
Cel pracy Celem pracy jest zbudowanie i zaprogramowanie robota w
konfiguracji pięcioboku przegubowego realizującego zadanie
kreślenia określonych trajektorii za pomocą przyrządu do pisania.
Podstawowym trybem pracy jest wypisywanie aktualnej godziny.
Rozszerzeniem funkcjonalności powstałego robota jest dołączenie
układu wizyjnego, umożliwiającego powielanie zapisów
narysowanych przez człowieka.
Zadania do wykonania 1. Opracowanie koncepcji konstrukcji robota oraz jego budowa
2. Wykonanie oprogramowania sterującego robotem
3. Przeprowadzenie testów działania układu.
4. Opracowanie algorytmów przetwarzania obrazu, mających na celu
zamianę rysunku odręcznego na trajektorię pisaka robota.
5. Zintegrowanie platformy z systemem wizyjnym
6. Sporządzenie dokumentacji technicznej.
Źródła 1. Thinking in C++, Bruce Eckel, January 13, 2000
2. Wprowadzenie do robotyki, Craig John, wyd. 2, przeł. J.
Knapczyk, Warszawa, WNT, 1993
3. Digital Image Processing, William K. Pratt, 2007
Liczba wykonawców 2
Uwagi Wymagana jest dobra znajomość matematyki, umiejętność projektowania oraz modelowania układów mechanicznych, i elektronicznych, znajomość podstaw przetwarzania obrazu, umiejętność programowania w C++ Temat zarezerwowany
17.
Temat projektu/pracy
dyplomowej
inżynierskiej (jęz. pol.)
Równoległe przetwarzanie obrazów – technologia CUDA
Temat projektu/pracy
dyplomowej
inżynierskiej (jęz. ang.)
Parallel image processing – CUDA technology
Opiekun pracy dr inż. Piotr Fiertek
Konsultant pracy
Cel pracy Celem proponowanego tematu jest zapoznanie się z możliwością
wykorzystania mocy obliczeniowych nowoczesnych kart graficznych
do przetwarzania obrazów oraz implementacja algorytmów
przetwarzania obrazów, wykorzystujących przetwarzanie równoległe
– wykorzystanie technologii CUDA opracowanej przez firmę
NVIDIA.
Zadania do wykonania 1. Opanowanie obsługi interfejsu CUDA.
2. Zaimplementowanie podstawowych algorytmów przetwarzania
obrazu: filtry konwolucyjne, filtr medianowy, lokalne progowanie
obrazu.
3. Implementacja bardziej złożonych algorytmów: segmentacja
obrazu, eliminacja dystorsji obrazu.
4. Zamknięcie powstałych algorytmów w zbiór funkcji dostępnych
w dowolnym programie w postaci biblioteki DLL.
5. Napisanie aplikacji demonstracyjnej, wykorzystującej
opracowane algorytmy przetwarzania obrazu.
Źródła 1. Thinking in C++, Bruce Eckel, January 13, 2000
2. Digital Image Processing, William K. Pratt, 2007
3. CUDA w przykładach. Wprowadzenie do ogólnego
programowania procesorów GPU, Janson Sanders, Edward
Kandrot, 2012
Liczba wykonawców 2
Uwagi znajomość podstaw przetwarzania obrazów, dobra znajomość programowania w C++, środowisko Visual Studio
18.
Temat projektu/pracy
dyplomowej
inżynierskiej (jęz. pol.)
Sterowanie systemem oświetlenia za pomocą komend głosowych
Temat projektu/pracy
dyplomowej
inżynierskiej (jęz. ang.)
Voice control of home lighting system
Opiekun pracy dr inż. Piotr Kaczmarek
Konsultant pracy
Cel pracy Opracowanie mikroprocesorowego systemu sterującego oświetleniem
budynku, sterowanego za pomocą komend głosowych
Zadania do wykonania 1. Opracowanie koncepcji systemu
2. Wykonanie badań wybranych algorytmów w środowisku Matlab
3. Wykonanie układu elektronicznego urządzenia (możliwość
wykorzystania gotowych modułów typu Arduino, Raspberry PI itp.)
4. Implementacja zaproponowanych algorytmów
5. Weryfikacja praktyczna możliwości rozpoznawania 4-5 komend
głosowych przez układ sterujący
Źródła 1. W. Sradomski MATLAB. Praktyczny podręcznik programowania,
Helion, 2015
2. T. Zieliński Cyfrowe przetwarzanie sygnałów. Od teorii do
zastosowań, WKŁ 2007
Liczba wykonawców 2
Uwagi Wymagana bardzo dobra znajomość metod cyfrowego przetwarzania sygnałów. Temat zarezerwowany
19.
Temat projektu/pracy
dyplomowej
inżynierskiej (jęz. pol.)
Moduł Arduino jako sterownik temperatury pomieszczenia
Temat projektu/pracy
dyplomowej
inżynierskiej (jęz. ang.)
Temperature control system based on Arduino module
Opiekun pracy dr inż. Piotr Kaczmarek
Konsultant pracy
Cel pracy Opracowanie sterownika temperatury w pomieszczeniu.
Urządzenie pozwoli na zbieranie informacji z czujników oraz
sterowanie podłączonymi urządzeniami wykonawczymi.
Urządzenie umożliwiać będzie komunikację poprzez magistralę USB
z komputerem klasy PC
Zadania do wykonania 1. Opracowanie i budowa sterownika
2. Opracowanie interfejsu użytkownika
3. Wykonanie aplikacji nadzorującej oraz sterującej na
komputer klasy PC
4. Identyfikacja modelu obiektu sterowania (makieta
pomieszczenia)
5. Wybór struktury oraz nastaw regulatora
6. Weryfikacja praktyczna wykonanego układu
7. Opracowanie dokumentacji
Źródła 1 Paweł Hadam. Projektowanie systemów mikroprocesorowych, BTC
2004
Liczba wykonawców 2
Uwagi Temat zarezerwowany
20.
Temat projektu/pracy
dyplomowej
inżynierskiej (jęz. pol.)
Wiatromierz oparty ma module Raspberry PI
Temat projektu/pracy
dyplomowej
inżynierskiej (jęz. ang.)
Anemometer based on Raspberry PI module
Opiekun pracy dr inż. Piotr Kaczmarek
Konsultant pracy
Cel pracy Opracowanie układu wiatromierza z dostępem do danych
pomiarowych za pośrednictwem strony WWW.
Zadania do wykonania 1. Opracowanie koncepcji systemu
2.Wykonanie elektronicznego układu pomiarowego
3 Wykonanie oprogramowania komunikacyjnego
4. Wykonanie strony www i implementacja bazy danych
5. Testy systemu
Źródła 1. http://www.raspberrypi.org/
Liczba wykonawców 1-2
Uwagi Temat zarezerwowany

21.
Temat projektu/pracy
dyplomowej
inżynierskiej (jęz. pol.)
Reklama LED na kole rowerowym
Temat projektu/pracy
dyplomowej
inżynierskiej (jęz. ang.)
LED advertisement on bicycle wheel
Opiekun pracy dr inż. Piotr Fiertek
Konsultant pracy
Cel pracy Opracowanie i wykonanie układu generującego obraz na kole
poruszającego się roweru za pomocą linijki diod LED
Zadania do wykonania 1. Opracowanie koncepcji układu
2. Wykonanie układu elektronicznego
3. Wykonanie oprogramowania
4. Testy układu
Źródła 1. T. Francuz, Język C dla mikrokontrolerów AVR. Od podstaw do
zaawansowanych aplikacji, Helion 2011
Liczba wykonawców 1-2
Uwagi temat zarezerwowany
22.
Temat projektu/pracy
dyplomowej
inżynierskiej (jęz. pol.)
Programowalny sterownik ogólnego przeznaczenia
Temat projektu/pracy
dyplomowej
inżynierskiej (jęz. ang.)
General-purpose programmable controller
Opiekun pracy dr inż. Piotr Kaczmarek
Konsultant pracy
Cel pracy Opracowanie i wykonanie układu sterownika ogólnego przeznaczenia
w oparciu o wybrany mikrokontroler
Zadania do wykonania 1. Zaprojektowanie sterownika uniwersalnego na bazie
wybranego procesora (możliwość wykorzystania gotowego
modułu np. Arduino, Raspberry PI itp.)
2. Przygotowanie dokumentacji technicznej sterownika
3. Przygotowanie prototypu sterownika uniwersalnego
4. Wybór obiektu sterowania
5. Testy urządzenia na modelu obiektu
6. Opracowanie podstawowego oprogramowania
Źródła 1. J. Augustyn, Projektowanie systemów wbudowanych na
przykładzie rodziny SAM7S z rdzeniem ARM7TDMI,
IGSMiE PAN, 2007
2. Sloss, D. Symes, C. Wright, ARM System Developer's
Guide: Designing and Optimizing System Software, Elsevier,
2004
3. Paweł Hadam. Projektowanie systemów
mikroprocesorowych, BTC 2004
Liczba wykonawców 2
Uwagi
23.
Temat projektu/pracy
dyplomowej
inżynierskiej (jęz. pol.)
Stacja pogodowa zbudowana w oparciu o układ Raspberry Pi
Temat projektu/pracy
dyplomowej
inżynierskiej (jęz. ang.)
Weather Stations based on Raspberry Pi module
Opiekun pracy dr inż. Piotr Kaczmarek
Konsultant pracy
Cel pracy Opracowanie i wykonanie stacji pogodowej, z której dane będą
dostępne za pośrednictwem strony WWW
Zadania do wykonania 1. Opracowanie i wykonanie zestawu czujników temperatury i
ciśnienia
2. Projekt bazy danych
3. Wykonanie oprogramowania serwera WWW
Źródła 1. http://www.raspberrypi.org/
Liczba wykonawców 2
Uwagi Temat zarezerwowany
24.
Temat projektu/pracy
dyplomowej
inżynierskiej (jęz. pol.)
Integracja wyników pomiarów czujnika ciśnienia oraz systemu
GPS do określenia wysokości
Temat projektu/pracy
dyplomowej
inżynierskiej (jęz. ang.)
Integration of pressure sensor measurements and GPS for
altitude control.
Opiekun pracy dr inż. Piotr Kaczmarek
Konsultant pracy
Cel pracy Opracowanie i wykonanie systemu lokalizacji biegacza bazującego
na danych z GPS oraz czujników MEMS
Zadania do wykonania 1. Wybór platformy sprzętowej zbierającej i analizującej dane
(telefon lub tablet z GPS)
2. Opracowanie i wykonanie zespołu czujników przesyłających dane
do jednostki centralnej
3. Wykonanie oprogramowania zbierającego dane
Źródła 1. Janusz Narkiewicz GPS i inne satelitarne systemy nawigacyjne
2. Charlie Collins, Michael Galpin, Matthias Kaeppler Android w
praktyce
Liczba wykonawców 2
Uwagi
25.
Temat projektu/pracy
dyplomowej
inżynierskiej (jęz. pol.)
Mikroprocesorowy układ do pomiaru sprawności wymienników
ciepła powietrze-powietrze.
Temat projektu/pracy
dyplomowej
inżynierskiej (jęz. ang.)
Microcontroller based system for measuring efficiency of air to
air heat exchangers.
Opiekun pracy dr inż. Piotr Kaczmarek
Konsultant pracy ---
Cel pracy Wykonanie urządzenia elektronicznego służącego do pomiarów
sprawności systemów odzysku ciepła w układach wentylacji
mechanicznej.
Zadania do wykonania 1. Określenie założeń projektowych
2. Wykonanie układu elektronicznego
3. Wykonanie oprogramowania mikrokontrolera
4. Wykonanie oprogramowania na komputer PC do archiwizacji i
zarządzania procesem pomiarowym.
5. Weryfikacja praktyczna działania układu z wykorzystaniem
wybranego wymiennika
Źródła 1. S. Wiśniewski, T. Wiśniewski Wymiana ciepła
2. K. Gutkowski, D. Butrymowicz Chłodnictwo i klimatyzacja
Liczba wykonawców 1-2
Uwagi Temat zarezerwowany
26.
Temat projektu/pracy
dyplomowej
inżynierskiej (jęz. pol.)
Zintegrowany system sterowania instalacjami w budynku
Temat projektu/pracy
dyplomowej
inżynierskiej (jęz. ang.)
Integrated building control system
Opiekun pracy dr inż. Piotr Kaczmarek
Konsultant pracy ---
Cel pracy Wykonanie projektu układu sterowania wybranymi instalacjami
budynku z możliwością zdalnego monitoringu.
Zadania do wykonania 1. Określenie wymagań projektowych
2. Wykonanie części sprzętowej sterownika w oparciu o wybrany
mikrokontroler lub układ PLC
3. Wykonanie oprogramowania sterującego
4. Wykonanie oprogramowania monitorującego pracę sterownika za
pomocą urządzenia mobilnego
Źródła 1. Dokumentacja techniczna wybranego oprogramowania SCADA.
2. Dokumentacja techniczna wybranego sterownika
PLC/mikrokontrolera.
Liczba wykonawców 1-2
Uwagi
27.
Temat projektu/pracy
dyplomowej
inżynierskiej (jęz. pol.)
Sterowanie wahadłem odwróconym
Temat projektu/pracy
dyplomowej
inżynierskiej (jęz. ang.)
Control of an inverted pendulum
Opiekun pracy dr inż. Michał Meller
Konsultant pracy
Cel pracy Opracowanie, uruchomienie i przetestowanie układu sterowania
wahadłem odwróconym.
Zadania do wykonania 1. Opracowanie modelu matematycznego obiektu
2. Opracowanie układu sterującego
3. Opracowanie praw sterowania
4. Weryfikacja praw sterowania w układzie rzeczywistym
Źródła 1. W. Brogan, „Modern Control Theory”
Liczba wykonawców 1
Uwagi Temat zarezerwowany

28.
Temat projektu/pracy
dyplomowej
inżynierskiej (jęz. pol.)
Stabilizacja kuli na walcu
Temat projektu/pracy
dyplomowej
inżynierskiej (jęz. ang.)
Control of a ball on a roller.
Opiekun pracy dr inż. Michał Meller
Konsultant pracy
Cel pracy Opracowanie, uruchomienie i przetestowanie układu stabilizacji kuli
na walcu.
Zadania do wykonania 1. Budowa obiektu sterowania
2. Opracowanie modelu matematycznego obiektu
3. Opracowanie układu sterującego
4. Opracowanie praw sterowania
5. Weryfikacja praw sterowania w układzie rzeczywistym
Źródła 1. W. Brogan, „Modern Control Theory”
Liczba wykonawców 2
Uwagi Temat zarezerwowany
29.
Temat projektu/pracy
dyplomowej
inżynierskiej (jęz. pol.)
Adaptacyjne usuwanie zakłóceń w szmerach oddechowych
Temat projektu/pracy
dyplomowej
inżynierskiej (jęz. ang.)
Adaptive noise cancellation in breathing signal
Opiekun pracy dr inż. Michał Meller
Konsultant pracy
Cel pracy Opracowanie dwukanałowego układu do rejestracji szmerów
oddechowych, wyposażonego w funkcję adaptacyjnej eliminacji
zakłóceń akustycznych pochodzących z otoczenia.
Zadania do wykonania 1. Opracowanie koncepcji układu pomiarowego
2. Opracowanie projektu i wykonanie układu pomiarowego
3. Opracowanie i implementacja algorytmów filtracji adaptacyjnej
4. Przetestowanie urządzenia w warunkach rzeczywistych
Źródła 1. S. Hykin, „Adaptive filter theory”
Liczba wykonawców 1
Uwagi
30.
Temat projektu/pracy
dyplomowej
inżynierskiej (jęz. pol.)
Stabilizacja kamery „w punkt”
Temat projektu/pracy
dyplomowej
inżynierskiej (jęz. ang.)
Camera stabilization system
Opiekun pracy dr inż. Michał Meller
Konsultant pracy
Cel pracy Celem projektu jest opracowanie systemu stabilizacji kamery „w
punkt”. System ma wykorzystywać układ pomiarowy w postaci
żyroskopu i akcelerometru, oraz zawierać prosty układ wykonawczy.
Zadaniem systemu jest stabilizacja kamery tak, aby środek obrazu był
skierowany w konkretny punkt przestrzeni.
Zadania do wykonania 1. Wykonanie układu pomiarowego i wykonawczego
2. Opracowanie algorytmu filtracji danych pomiarowych
3. Opracowanie algorytmu sterowania dla układu
wykonawczego.
4. Uruchomienie i przetestowanie systemu
Źródła
Liczba wykonawców 2
Uwagi
31.
Temat projektu/pracy
dyplomowej
inżynierskiej (jęz. pol.)
Śledzenie obiektów w przestrzeni powietrznej na podstawie
danych dostarczanych przez system ADS-B
Temat projektu/pracy
dyplomowej
inżynierskiej (jęz. ang.)
Tracking of airborne objects using ADS-B data
Opiekun pracy dr inż. Michał Meller
Konsultant pracy
Cel pracy Celem projektu jest opracowanie aplikacji do śledzenia obiektów
powietrznych na podstawie danych dostarczanych przez system ADS-
B.
Zadania do wykonania 1. Wybór, zakup i uruchomienie tunera ADS-B
2. Opracowanie algorytmu śledzenia wykorzystującego filtr
Kalmana
3. Opracowanie algorytmu inicjacji trasy
4. Implementacja algorytmów śledzenia
5. Testy działania aplikacji
Źródła
Liczba wykonawców 2
Uwagi

32.
Temat projektu/pracy
dyplomowej
inżynierskiej (jęz. pol.)
Interfejs programowy i sprzętowy umożliwiający sterowanie
zestawem laboratoryjnym MAB-94 przy użyciu minikomputera
Raspberry PI 2.
Temat projektu/pracy
dyplomowej
inżynierskiej (jęz. ang.)
Software and hardware interface aimed to control the lab set
MAB-94 using the RPI2 microcomputer.
Opiekun pracy mgr inż. Marcin Pazio
Konsultant pracy
Cel pracy Celem pracy jest budowa interfejsu umożliwiającego współpracę
zestawu MAB-94 z minikomputerem RPI2, oraz utworzenie
odpowiedniego oprogramowania testującego.
Zadania do wykonania - budowa sprzęgu sprzętowego między minikomputerem RPI2 a
zestawem MAB-94;
- oprogramowanie (sterowniki) umożliwiające dostęp do funkcji
MAB-94 z poziomu RPI2.
Źródła 1. Dokumentacja komputera RaspberryPi
2. Dokumentacja zestawu MAB-94.
Liczba wykonawców 2
Uwagi
33.
Temat projektu/pracy
dyplomowej
inżynierskiej (jęz. pol.)
Przestrzenna lokalizacja i śledzenie położenia obiektu za pomocą
komputerów Raspberry PI 2.
Temat projektu/pracy
dyplomowej
inżynierskiej (jęz. ang.)
Spatial object localization and tracking using the RPI2
minicomputer.
Opiekun pracy mgr inż. Marcin Pazio
Konsultant pracy
Cel pracy Celem pracy jest stworzenie systemu zbudowanego z
wykorzystaniem dwóch minikomputerów RPI2 wyposażonych w
kamery, umożliwiających przestrzenną lokalizację obiektu.
Zadania do wykonania - oprogramowanie umożliwiające śledzenie obiektu w przestrzeni.
Źródła 1. Dokumentacja komputera RaspberryPi
2. Dokumentacja OpenCV.
Liczba wykonawców 3
Uwagi
34.
Temat projektu/pracy
dyplomowej
inżynierskiej (jęz. pol.)
Sterownik logiczny na bazie minikomputera Raspberry PI 2.
Temat projektu/pracy
dyplomowej
inżynierskiej (jęz. ang.)
RPI2-based logic controller.
Opiekun pracy mgr inż. Marcin Pazio
Konsultant pracy
Cel pracy Celem pracy jest stworzenie oprogramowania oraz interfejsu
sprzętowego pozwalającego na wykorzystanie minikomputera RPI2
jako sterownika logicznego.
Zadania do wykonania Interfejs oraz oprogramowanie realizujące funkcje sterownika
logicznego z wykorzystaniem sterownika RPI2.
Źródła 1. Dokumentacja komputera RaspberryPi2.
Liczba wykonawców 2
Uwagi

35.
Temat projektu/pracy
dyplomowej
inżynierskiej (jęz. pol.)
Centrala alarmowa na bazie minikomputera Raspberry PI 2 z
funkcją monitorowania wideo.
Temat projektu/pracy
dyplomowej
inżynierskiej (jęz. ang.)
RPI-2 based alarm controller with video surveillance
functionality.
Opiekun pracy mgr inż. Marcin Pazio
Konsultant pracy
Cel pracy Celem pracy jest zbudowanie centrali alarmowej w oparciu o
minikomputer RPI2 umożliwiającej nadzór wideo. Centrala powinna
wykorzystywać możliwości zdalnej komunikacji, oraz modułowość
(współpracę kilku centralek).
Zadania do wykonania Oprogramowanie umożliwiające zastosowanie RPI2 jako centralki
alarmowej, wykorzystujące możliwości wideo minikomputera.
Źródła 1. Dokumentacja komputera RaspberryPi
2. Dokumentacja OpenCV.
Liczba wykonawców 3
Uwagi
36.
Temat projektu/pracy
dyplomowej
inżynierskiej (jęz. pol.)
Zestaw laboratoryjny do badania sterowanych prostowników
(triaków i tyrystorów).
Temat projektu/pracy
dyplomowej
inżynierskiej (jęz. ang.)
Set for testing controlled rectifiers.
Opiekun pracy mgr inż. Marcin Pazio
Konsultant pracy
Cel pracy Celem pracy jest stworzenie zestawu laboratoryjnego
umożliwiającego testowanie podstawowych charakterystyk
prostowników sterowanych (triaków i tyrystorów).
Zadania do wykonania Budowa zestawu do wizualizacji charakterystyk prądowo-
napięciowych prostowników sterowanych.
Źródła 1. Januszewski S., Świątek H.: Diody i tyrystory w pytaniach i
odpowiedziach,
2. dokumentacja elementów półprzewodnikowych.
Liczba wykonawców 2
Uwagi
37.
Temat projektu/pracy
dyplomowej
inżynierskiej (jęz. pol.)
Inteligentna kamera przemysłowa na bazie zestawu
minikomputera Raspberry Pi 2.
Temat projektu/pracy
dyplomowej
inżynierskiej (jęz. ang.)
Intelligent surveillance based on RPI2 minicomputer.
Opiekun pracy Marcin Pazio
Konsultant pracy
Cel pracy Celem pracy jest zbudowanie na bazie mC RPI2 kamery dozorującej.
Kamera ma mieć możliwość zmiany pola obserwacji poprzez zmianę
orientacji przestrzennej urządzenia. Kamera ma m.in. wykrywać
zmiany ułożenia przedmiotów w otoczeniu, wykrywać ruch i śledzić
poruszający się obiekt. Możliwe jest wykorzystanie czujników
pomocniczych. Wykrycie ruchu/zmian w obserwowanym
pomieszczeniu powinno wywoływać alarm. Kamera może
przeprowadzać ocenę zarejestrowanej sytuacji (intruz/istotna zmiana
sceny/drobne zmiany sceny) i uwzględniać różne strefy w
obserwowanej scenie.
Zadania do wykonania Budowa i utworzenie oprogramowania kamery spełniającej podane
założenia.
Źródła 1. Dokumentacja biblioteki OpenCV,
2. Dokumentacja systemu Raspbian,
3. C.R. Bishop „Pattern recognition and machine learning”,
4. R. C. Gonzalez, R. E.Woods „Digital image processing”.
Liczba wykonawców 2 (Jakub Zawalich, Sebastian Gorzelańczyk)
Uwagi
38.
Temat projektu/pracy
dyplomowej
inżynierskiej (jęz. pol.)
Komputer PC jak jednostka sterująca robota RRR.
Temat projektu/pracy
dyplomowej
inżynierskiej (jęz. ang.)
PC computer as a RRR robot controller.
Opiekun pracy dr inż. Paweł Raczyński
Konsultant pracy
Cel pracy Celem pracy jest opracowanie oprogramowania sterującego modelem
laboratoryjnym robota o konfiguracji RRR z poziomu komputera PC.
Robot posiada trzy stopnie swobody ramienia oraz kiść o dwóch
stopniach swobody. Z robotem skojarzony jest system transportowy
w postaci przenośnika taśmowego oraz brama pomiarowa
umożliwiającego pomiar średnicy przedmiotów na przenośniku.
Elementem zestawu jest sterownik robota połączony z komputerem
za pomocą łącza USB. Robot wyposażony jest w zestaw czujników
pomiarowych w postaci enkoderów i wyłączników krańcowych.
Zadania do wykonania 1. Analiza i uruchomienie sterownika.
2. Opracowania oprogramowania sterownika umożliwiająca odczyt
czujników i sterowanie napędami wykonawczymi (język C lub
podobny).
3. Opracowanie biblioteki realizującej podstawowymi ruchami
robota (język C lub podobny).
4. Opracowanie oprogramowania nadrzędnego robota
pozwalającego na programowanie sekwencji ruchów robota
techniką programowania i z wykorzystaniem techniki rejestracji
działań operatora korzystającego z pilota.
5. Opracowanie dokumentacji
Źródła 1. Dokumentacja techniczna robota.
2. Dokumentacja sterownika robota.
3. Podręczniki programowania i bibliotek programistycznych.
Liczba wykonawców 2
Uwagi
39.
Temat projektu/pracy
dyplomowej
inżynierskiej (jęz. Pol.)
Uniwersalny sprzęg obiektu sterowania z komputerem PC
Temat projektu/pracy
dyplomowej
inżynierskiej (jęz. Ang.)
Universal interface between controlled object an a PC computer
Opiekun pracy dr inż. Paweł Raczyński
Konsultant pracy
Cel pracy Opracowanie i wykonanie uniwersalnego interfejsu umożliwiającego
sterowanie obiektem za pośrednictwem komputera PC wyposażonego
w interfejs USB. Od strony obiektu mamy ustaloną liczbę wejść i
wyjść cyfrowych oraz wejść i wyjść analogowych. Oprogramowanie
interfejsu dokonuje konwersji szeregowo-równoległej oraz
równoległo-szeregowej i przekazuje dane do/z portów we/wy do
komputera PC poprzez interfejs USB.
Zadania do wykonania 1. Opracowanie koncepcji konwertera.
2. Realizacja konwertera z wykorzystaniem wybranego
mikrokontrolera.
3. Opracowanie oprogramowania mikrokontrolera.
4. Opracowanie biblioteki funkcji wspomagających (język C)
tworzenie aplikacji na komputerze PC transfer informacji
obiekt – komputer.
5. Opracowanie dokumentacji.
Źródła 1. Dokumentacja techniczna wybranego mikrokontrolera.
2. Dokumentacja techniczna interfejsu USB.
3. Dokumentacja narzędzi programistycznych.
Liczba wykonawców 1-2
Uwagi
40.
Temat projektu/pracy
dyplomowej
inżynierskiej (jęz. Pol.)
System znacznikowania wspomagający nawigację robota
inspekcji rurociągów.
Temat projektu/pracy
dyplomowej
inżynierskiej (jęz. Ang.)
Markering system as a support of the pipeline inspection robot
navigation.
Opiekun pracy dr inż. Paweł Raczyński
Konsultant pracy
Cel pracy Opracowanie oprogramowania detektora trawersu robota z
wykorzystaniem odbioru fali elektromagnetycznej ULF oraz geofonu
(sprzęt detektora dostępny). Opracowanie i implementacja
algorytmów obróbki sygnałów z czujników i ich rejestracji w pamięci
nieulotnej detektora. Opracowanie bezprzewodowej łączności
detektora z komputerem PC. Opracowanie oprogramowania analizy
zarejestrowanych sygnałów pomiarowych w celu precyzyjnego
określenia czasu trawersu robota.
Zadania do wykonania 1. Opracowanie oprogramowania systemu pomiaru sygnałów
niosących informację o obecności robota i ich archiwacji w
pamięci FLASH.
2. Opracowanie i programowa implementacja algorytmów
obróbki sygnałów pomiarowych (analiza amplitudowa i
częstotliwościowa).
3. Opracowanie protokółu komunikacyjnego detektora i
komputera PC oraz jego programowa implementacja.
4. Opracowanie interfejsu użytkownika.
5. Opracowanie oprogramowania analizy zarejestrowanych
danych w celu określenia czasu trawersu robota.
6. Opracowanie dokumentacji.
Źródła 1. Przykłady istniejących rozwiązań komercyjnych dostępne u
opiekuna pracy i w zasobach Internetu.
2. Dokumentacja sprzętu detektora.
3. Dokumentacja oprogramowania narzędziowego.
Liczba wykonawców 2
Uwagi

41.
Temat projektu/pracy
dyplomowej
inżynierskiej (jęz. Pol.)
Robot do inspekcji rurociągów.
Temat projektu/pracy
dyplomowej
inżynierskiej (jęz. Ang.)
Pipeline intelligent pig.
Opiekun pracy dr inż. Paweł Raczyński
Konsultant pracy
Cel pracy Opracowanie koncepcji i realizacja robota inspekcyjnego do badania
rurociągów bez wyłączania ich z eksploatacji. Zadaniem robota jest
pomiar minimalnej średnicy wewnętrznej badanego rurociągu i
rejestracja wyników w nieulotnej pamięci. Robot powinien być
autonomiczny w zakresie min 60 godzin i umożliwiać precyzyjną
korelację pomiarów średnicy z przebytą drogą. Część mechaniczna
robota jest dostępna.
Zadania do wykonania 1. Opracowanie koncepcji elektroniki pomiarowej, komputera
pokładowego i systemu nawigacji robota.
2. Realizacja części elektronicznej robota.
3. Opracowanie oprogramowania komputera pokładowego.
4. Opracowanie i implementacja interfejsu użytkownika
umożliwiającego test robota, przygotowanie do inspekcji oraz
import danych pomiarowych.
5. Opracowanie oprogramowania komputera nadrzędnego (PC)
umożliwiającego wizualizację danych inspekcyjnych.
6. Opracowanie dokumentacji.
Źródła 1. Informacje o obecnych na rynku rozwiązaniach komercyjnych
realizujących podobne zadania.
2. Dane katalogowe stosowanych komponentów elektronicznych.
3. Dokumentacja oprogramowania narzędziowego.
Liczba wykonawców 2
Uwagi
42.
Temat projektu/pracy
dyplomowej
inżynierskiej (jęz. Pol.)
Sterowanie ruchem windy przez Internet.
Temat projektu/pracy
dyplomowej
inżynierskiej (jęz. Ang.)
Controlling the movement of the elevator via Internet.
Opiekun pracy dr inż. Paweł Raczyński
Konsultant pracy
Cel pracy Opracowanie koncepcji i realizacja systemu sterowania modelem
windy przez Internet.
Zadania do wykonania 1. Opracowanie koncepcji systemu sterowania modelem windy przez
Internet.
2. Opracowanie i realizacja sterownika windy współpracującego z
komputerem PC.
3. Opracowanie oprogramowania umożliwiającego sterowanie
ruchem windy oraz monitorowanie stanu windy z poziomu
komputera PC.
4. Opracowanie oprogramowania umożliwiającego przejęcie kontroli
nad procesem sterowania windą przez użytkownika połączonego z
komputerem sterującym przez Internet.
5. Opracowanie dokumentacji
Źródła 1. Dokumentacja modelu windy.
2. Dane katalogowe stosowanych komponentów elektronicznych.
3. Dokumentacja oprogramowania narzędziowego.
Liczba wykonawców 2
Uwagi
43.
Temat projektu/pracy
dyplomowej
inżynierskiej (jęz. pol.)
Oprogramowanie wbudowane kwadrokoptera
Temat projektu/pracy
dyplomowej
inżynierskiej (jęz. ang.)
Embedded software for a quadrocopter
Opiekun pracy dr inż. Stanisław Raczyński
Konsultant pracy —
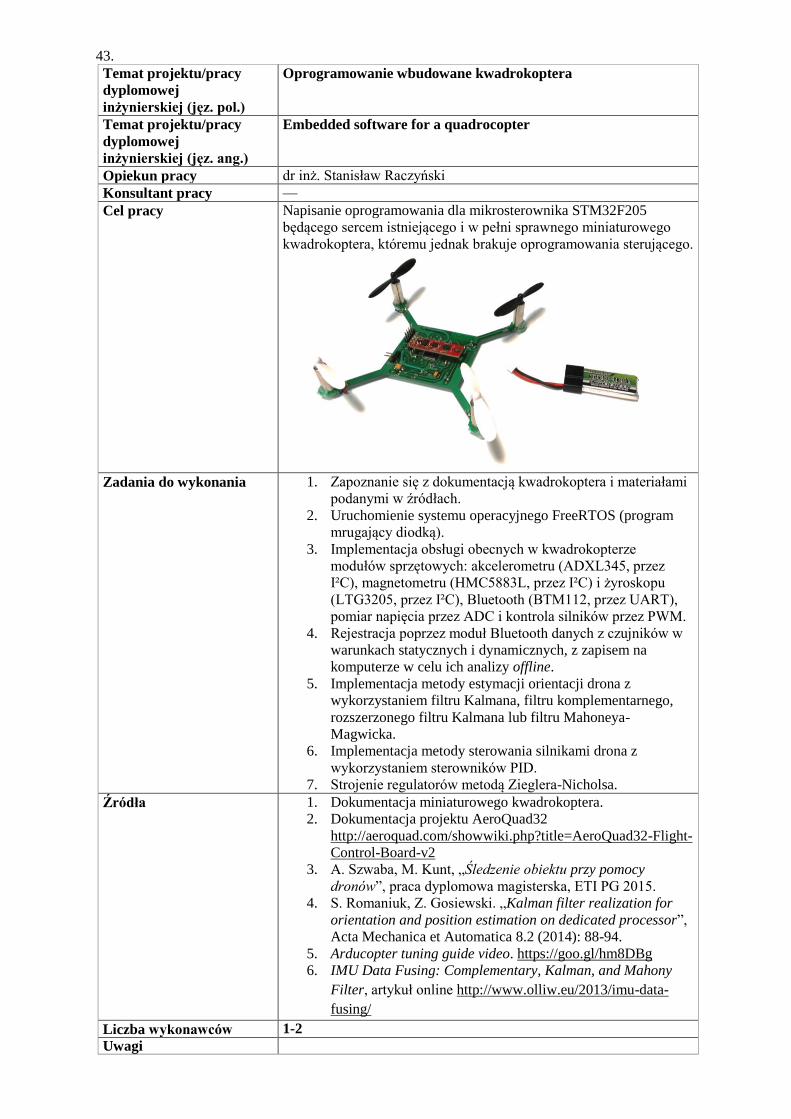
Cel pracy Napisanie oprogramowania dla mikrosterownika STM32F205
będącego sercem istniejącego i w pełni sprawnego miniaturowego
kwadrokoptera, któremu jednak brakuje oprogramowania sterującego.
Zadania do wykonania 1. Zapoznanie się z dokumentacją kwadrokoptera i materiałami
podanymi w źródłach.
2. Uruchomienie systemu operacyjnego FreeRTOS (program
mrugający diodką).
3. Implementacja obsługi obecnych w kwadrokopterze
modułów sprzętowych: akcelerometru (ADXL345, przez
I²C), magnetometru (HMC5883L, przez I²C) i żyroskopu
(LTG3205, przez I²C), Bluetooth (BTM112, przez UART),
pomiar napięcia przez ADC i kontrola silników przez PWM.
4. Rejestracja poprzez moduł Bluetooth danych z czujników w
warunkach statycznych i dynamicznych, z zapisem na
komputerze w celu ich analizy offline.
5. Implementacja metody estymacji orientacji drona z
wykorzystaniem filtru Kalmana, filtru komplementarnego,
rozszerzonego filtru Kalmana lub filtru Mahoneya-
Magwicka.
6. Implementacja metody sterowania silnikami drona z
wykorzystaniem sterowników PID.
7. Strojenie regulatorów metodą Zieglera-Nicholsa.
Źródła 1. Dokumentacja miniaturowego kwadrokoptera.
2. Dokumentacja projektu AeroQuad32
http://aeroquad.com/showwiki.php?title=AeroQuad32-Flight-
Control-Board-v2
3. A. Szwaba, M. Kunt, „Śledzenie obiektu przy pomocy
dronów”, praca dyplomowa magisterska, ETI PG 2015.
4. S. Romaniuk, Z. Gosiewski. „Kalman filter realization for
orientation and position estimation on dedicated processor”,
Acta Mechanica et Automatica 8.2 (2014): 88-94.
5. Arducopter tuning guide video. https://goo.gl/hm8DBg
6. IMU Data Fusing: Complementary, Kalman, and Mahony
Filter, artykuł online http://www.olliw.eu/2013/imu-data-
fusing/
Liczba wykonawców 1-2
Uwagi
44.
Temat projektu/pracy
dyplomowej
inżynierskiej (jęz. pol.)
Oprogramowanie służące do kontroli położenia i orientacji
elementu elektronicznego w maszynach typu pick and place
Temat projektu/pracy
dyplomowej
inżynierskiej (jęz. ang.)
Software for pick and place machines for position and orientation
control of electronic elements
Opiekun pracy dr inż. Stanisław Raczyński
Konsultant pracy —
Cel pracy Opracowanie oprogramowania służącego do rozpoznania
podstawowych i unikalnych kształtów elementów elektronicznych w
tym wykrycie rozstawu nóżek, pozycji i rotacji względem środka za
pomocą kamery przemysłowej i bibliotek OpenCV. Algorytm jest
wykorzystywany w maszynach przemysłowych typu pick and place
do precyzyjnego umieszczenia elementów na płytce. Zadanie
przewiduje również szereg testów z doborem intensywności i barwy
oświetlenia (pasek ledowy RGB) oraz parametrów progowania dla
uzyskania jak najlepszego obrazu.
Zadania do wykonania 1. Przegląd literatury.
2. Zapoznanie się z algorytmami dostępnymi w OpenCV.
3. Opracowanie algorytmu rozpoznające cechy szczególne
elementu w wybranym przez siebie środowisku (np. C++).
4. Dobranie parametrów oświetlenia oraz progowania w celu
uzyskania jak najlepszego obrazu wyjściowego.
5. Realizacja trybu uczenia dla nietypowych kształtów
elementów, posiadającego interfejs graficzny.
6. Bonus: testy na istniejącej maszynie pick and place.
Źródła 1. Dokumentacja biblioteki OpenCV.
Liczba wykonawców 1
Uwagi Temat zarezerwowany
45.
Temat projektu/pracy
dyplomowej
inżynierskiej (jęz. pol.)
Rozpoznawanie i wizyjna klasyfikacja roślin
Temat projektu/pracy
dyplomowej
inżynierskiej (jęz. ang.)
Detection and recognition of plants from images
Opiekun pracy dr inż. Stanisław Raczyński
Konsultant pracy —
Cel pracy Implementacja metody pozwalającej na wykrywanie i klasyfikację
roślin w obrazach zarejestrowanych przez kamerę. Wyniki projektu
będą mogły być wykorzystane w kategorii freestyle konkursu Field
Robot Event 2016, do którego zgłaszany jest robot rolniczy „Żuk”
konstruowany przez członków koła naukowego SKALP.
Zadania do wykonania 1. Zapoznanie się z wynikami konkursu PlantCLEF oraz
literaturą.
2. Pozyskanie materiałów zdjęciowych z konkursu PlantCLEF
2016.
3. Uruchomienie biblioteki OpenCV w docelowym środowisku
(komputer na pokładzie robota rolniczego).
4. Implementacja wykrywania roślin na danych z PlantCLEF z
wykorzystaniem OpenCV.
5. Implementacja klasyfikacji roślin na danych z PlantCLEF
(np. metoda PCANet, osiągająca bardzo dobre wyniki
klasyfikacji, będąc jednocześnie bardzo prostą w
implementacji).
6. Wykonanie zdjęć kamerą robota roliczego „Żuk” w
różnorodnych warunkach oświetleniowych.
7. Eksperymenty z danymi rzeczywistymi, poprawki
implementacji i opracowanie wyników.
Źródła 1. Materiały międzynarodowego konkursu dla algorytmów
rozpoznawania roślin PlantCLEF
http://www.imageclef.org/node/198
2. Dokumentacja konkursowa Field Robot Event 2016.
3. Opisy algorytmów zgłaszanych na PlantCLEF.
4. Chan, Tsung-Han, et al. “PCANet: A simple deep learning
baseline for image classification?”, arXiv preprint
arXiv:1404.3606 (2014).
5. Joly, Alexis, et al. “LifeCLEF 2015: multimedia life species
identification challenges.” Experimental IR Meets
Multilinguality, Multimodality, and Interaction. Springer
International Publishing, 2015. 462-483.
Liczba wykonawców 1
Uwagi Temat zarezerwowany
46.
Temat projektu/pracy
dyplomowej
inżynierskiej (jęz. pol.)
Podwozie do robota rolniczego
Temat projektu/pracy
dyplomowej
inżynierskiej (jęz. ang.)
Chassis for a field robot
Opiekun pracy dr inż. Stanisław Raczyński
Konsultant pracy —
Cel pracy Zaprojektowanie i wykonanie podwozia do robota rolniczego, które
ma zastąpić istniejące podwozie robota „Żuk” w konkursie Field
Robot Event 2016. Podwozie powinno zapewnić jak największą
stabilność platformy (minimalizacja zmienności kątów roll i pitch) w
wyboistym i potencjalnie błotnistym terenie rolniczym oraz
możliwość pokonywania przeszkód o wysokości do 25 mm.
Zadania do wykonania 1. Analiza istniejącego podwozia. Identyfikacja błędów
projektowych.
2. Projekt mechaniczny nowego podwozia w oprogramowaniu
CAD.
3. Symulacje i wyliczenia charakterystyk mechanicznych
podwozia.
4. Wykonanie podwozia w oparciu o istniejące elementy,
elementy nowo zakupione oraz elementy wykonane na
frezarce lub innych maszynach CNC.
Źródła 1. Dokumentacja konkursowa Field Robot Event 2016.
2. Dokumentacja robota rolniczego „Żuk”.
Liczba wykonawców 1–2
Uwagi Temat zarezerwowany
47.
Temat projektu/pracy
dyplomowej
inżynierskiej (jęz. pol.)
Planowanie ścieżki dla robota rolniczego
Temat projektu/pracy
dyplomowej
inżynierskiej (jęz. ang.)
Path planning for a field robot
Opiekun pracy dr inż. Stanisław Raczyński
Konsultant pracy —
Cel pracy Metoda dynamicznego planowania ścieżki dla robota rolniczego w
oparciu o predefiniowane punkty nawigacyjne, bieżące położenia
przeszkód wykrytych przez lidar oraz bieżące położenie robota
pochodzące z algorytmu SLAM. Trasa robota i parametry jego
otoczenia powinny być zgodne z wymaganiami konkursu Field Robot
Event 2016.
Zadania do wykonania 1. Zapoznanie się z literaturą.
2. Zebranie dwu zestawów danych z lidaru.
3. Uruchomienie gotowego rozwiązania realizującego SLAM w
oparciu o dane z lidaru w systemie ROS.
4. Opracowanie metody planowania ścieżki (np. metoda
sztucznego potencjału) z wykorzystaniem zebranych danych
testowych.
5. Integracja opracowanej metody z systemem ROS.
6. Eksperymenty w świecie rzeczywistym z istniejącą platformą
mobilną „Żuk” lub „LEM”.
Źródła 1. Dokumentacja konkursowa Field Robot Event 2016.
2. Dokumentacja oprogramowania ROS.
Liczba wykonawców 1
Uwagi Temat zarezerowany
48.
Temat projektu/pracy
dyplomowej
inżynierskiej (jęz. pol.)
Kamera akustyczna
Temat projektu/pracy
dyplomowej
inżynierskiej (jęz. ang.)
Acoustic camera
Opiekun pracy dr inż. Stanisław Raczyński
Konsultant pracy —
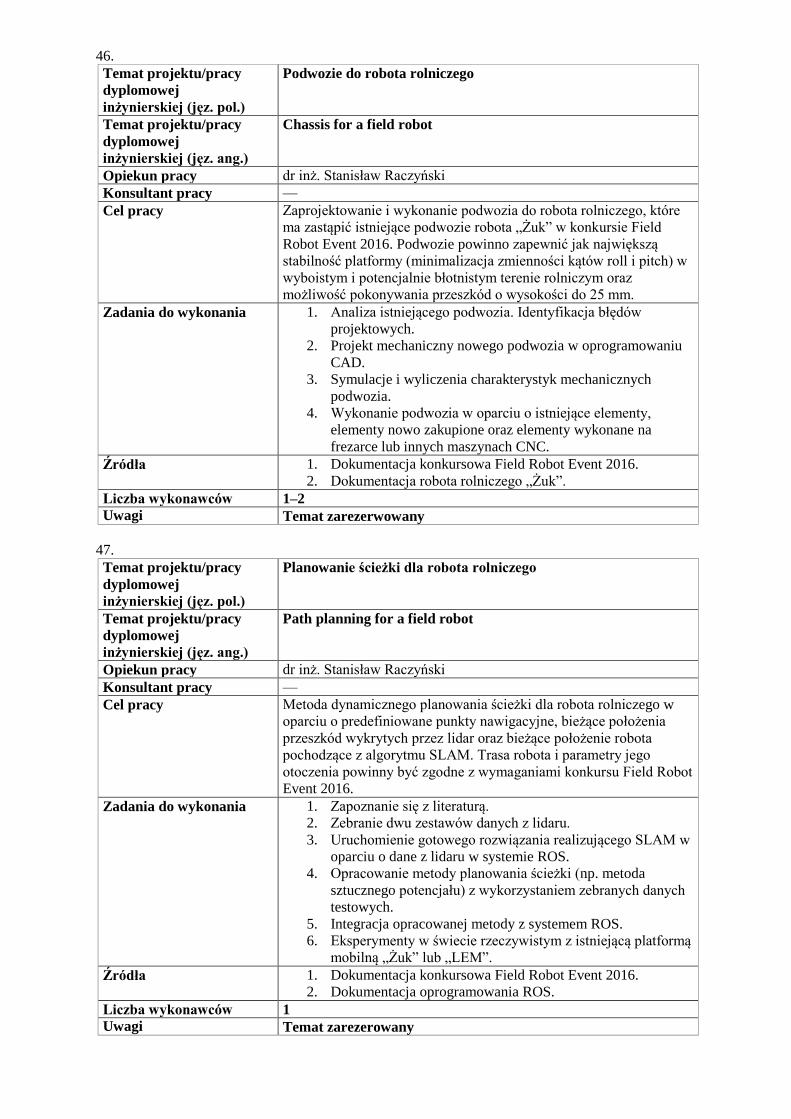
Cel pracy Implementacja kamery akustycznej w oparciu o macierz
mikrofonową o 8 lub 16 mikrofonach. Kamera akustyczna to
urządzenie wyliczające przestrzenny rozkład dźwięku.
Zadania do wykonania 1. Zapoznanie się z literaturą o metodzie SRP-PHAT.
2. Wykonanie ramy macierzy mikrofonowej z kamerą wizyjną
pośrodku, w oparciu o jeden lub dwa zestawy 8SoundsUSB.
3. Wykonanie synchronicznych nagrań wideo i
wielokanałowego audio w różnorodnych środowiskach (np.
pomieszczenie biurowe, ruch uliczny).
4. Analiza nagrań audio metodą mocy sterowanej odpowiedzi z
filtrem fazowym (SRP-PHAT) i wizualizacja wyników na
nagraniu wideo.
Źródła 1. S. Tervo, L. Tapio, "Interpolation methods for the SRP-
PHAT algorithm", Proc. of 11th IWAENC (2008).
Liczba wykonawców 1
Uwagi
49.
Temat projektu/pracy
dyplomowej
inżynierskiej (jęz. pol.)
System stereowizyny dla robota mobilnego
Temat projektu/pracy
dyplomowej
inżynierskiej (jęz. ang.)
Stereovision system for a mobile robot
Opiekun pracy dr inż. Stanisław Raczyński
Konsultant pracy —
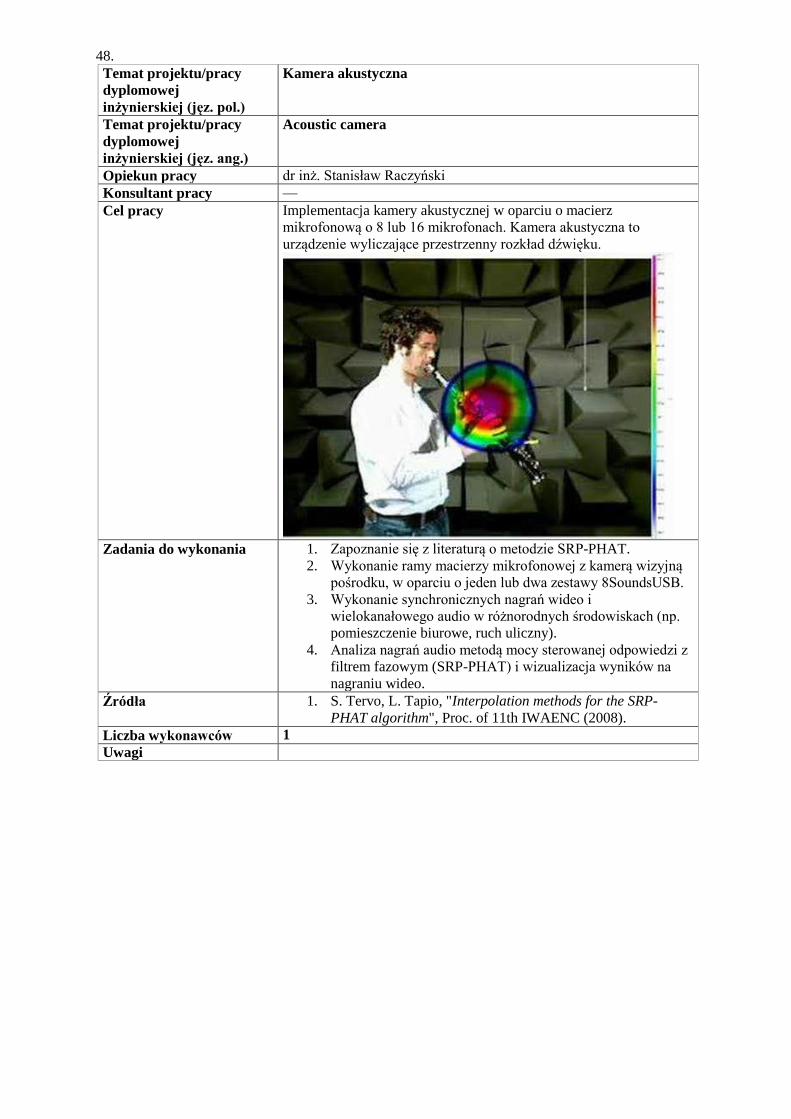
Cel pracy Instalacja systemu stereowizyjnego na istniejącej platformie mobilnej
(„Żuk” lub „LEM”) oraz wyznaczanie map głębi otoczenia robota w
celu umożliwienia mapowania otoczenia i nawigacji.
Zadania do wykonania 1. Wykonanie mocowania dwóch kamer na platformie mobilnej
z wykorzystaniem drukarki 3D.
2. Zarejestrowanie rozwojowego zestawu nagrań
stereowizyjnych.
3. Implementacja algorytmu tworzenia mapy głębi na podstawie
obrazów (rektyfikacja obrazów, wyliczanie przesunięć dla
par pikseli np. algorytmem block-matching, przeliczanie
przesunięć na odległość).
4. Opracowanie wyników zastosowania zaimplementowanego
algorytmu na zarejestrowanych nagraniach.
5. Bonus: integracja z systemem ROS w celu mapowania
otoczenia i nawigacji robota mobilnego.
Źródła 1. Dokumentacja platform mobilnych „LEM” i „Żuk”.
2. Brown, Myron Z., Darius Burschka, and Gregory D. Hager.
“Advances in computational stereo.” Pattern Analysis and
Machine Intelligence, IEEE Transactions on 25.8 (2003):
993-1008.
Liczba wykonawców 1
Uwagi

50.
Temat projektu/pracy
dyplomowej
inżynierskiej (jęz. pol.)
Robot mobilny śledzący źródło dźwięku
Temat projektu/pracy
dyplomowej
inżynierskiej (jęz. ang.)
Sound source following mobile robot
Opiekun pracy dr inż. Stanisław Raczyński
Konsultant pracy —
Cel pracy Wykorzystanie gotowego (ale nie zaprogramowanego) czujnika
kierunku dźwięku opartego o mikrosterownik Atmel SAM3X8E
Cortex-M3 oraz dwa układy ADMP441ACEZ.
Zadania do wykonania 1. Uruchomienie czujnika.
2. Komunikacja z układami ADMP441ACEZ przez I²S.
3. Implementacja pomiaru natężenia dźwięku w czasie
rzeczywistym.
4. Implementacja algorytmu GCC-PHAT w czasie
rzeczywistym.
5. Komunikacja z istniejącym robotem mobilnym (np. „Lem”
przez I²C) i montaż czujnika na tym robocie.
6. Oprogramowanie robota mobilnego realizujące podążanie za
źródłem dźwięku z uwzględnieniem dwuznaczności
dwumikrofonowego określania kierunku (taki układ nie
rozróżnia kierunku przód-tył, tylko lewo-prawo).
Źródła 1. Dokumentacja układu SAM3X8E Cortex-M3.
2. Dokumentacja układu ADMP441ACEZ.
3. M. Pazderska, D. Machala, „Robot mobilny podążający za
źródłem dźwięku”, praca dyplomowa magisterska, ETI PG
2015.
Liczba wykonawców 1
Uwagi
51.
Temat projektu/pracy
dyplomowej
inżynierskiej (jęz. pol.)
System wizyjny do rozpoznawania kart w grach karcianych
Temat projektu/pracy
dyplomowej
inżynierskiej (jęz. ang.)
Computer vision system for identifying cards in card games
Opiekun pracy dr inż. Stanisław Raczyński
Konsultant pracy
Cel pracy Celem pracy jest zaprojektowanie układu kamer łącznie z
oprogramowaniem, które będą służyć do rozpoznawania kart podczas
gier karcianych. Naszym podstawowym założeniem będzie
zastosowanie tego systemu do odmiany gry poker: Texas Hold’em.
Każdy gracz będzie siadał do stołu razem z telefonem
komórkowym typu Smartphone. Na tym telefonie będzie
zainstalowana aplikacja mobilna łącząca się z serwerem i
przekazująca nagranie wideo. Serwer będzie umieszczony na
wybranym przez nas komputerze.
Zgodnie z założeniami gry, na stole zawodnicy będą
przetrzymywali po 2 karty zakryte na specjalnie przygotowanych do
tego, przezroczystych prostokątach. Telefon umieszczony przez
każdego z graczy w wyznaczonym miejscu (pod stołem) będzie
obserwował jego karty.
Ponad stołem do gry zostanie zamontowany kolejny Smartphone,
który będzie rozpoznawał karty widoczne wszystkim graczom (do 5
kart). Chcemy, aby nasz system był jak najbardziej mobilny. W tym
celu planujemy zaprojektować oprogramowanie zorientowane
serwisowo. Umożliwi to ewentualne zastąpienie telefonów
komórkowych innymi urządzeniami bez dużych zmian w
infrastrukturze systemu
Zadania do wykonania 1. Opracowanie i budowa prototypu stołu do gry w pokera,
2. Przygotowanie aplikacji mobilnej służącej do przesyłania
obrazu wideo na serwer,
3. Stworzenie aplikacji serwera analizującej przychodzące
obrazy wideo,(Opracowanie metody wykrywania i
identyfikacji kart, np. z wykorzystaniem cech SIFT lub
SURF),
4. Stworzenie aplikacji wyliczającej różne statystyki na
podstawie rozpoznanych kart (np. prawdopodobieństwo
wygranej),
5. Rejestracja szeregu nagrań testowych.
Źródła 1. A. Nandi, „Automating Card Games Using OpenCV and
Python”, artykuł online.
http://arnab.org/blog/so-i-suck-24-automating-card-games-
using-opencv-and-python
2. B. Chen, J. Ankenman, „The Mathematics of Poker”
Liczba wykonawców 2
Uwagi Temat zarezerwowany
52.
Temat projektu/pracy
dyplomowej
inżynierskiej (jęz. pol.)
Zdalnie sterowany mobilny robot-kula
Temat projektu/pracy
dyplomowej
inżynierskiej (jęz. ang.)
Remotely controlled mobile spherical rolling robot
Opiekun pracy dr inż. Stanisław Raczyński
Konsultant pracy —
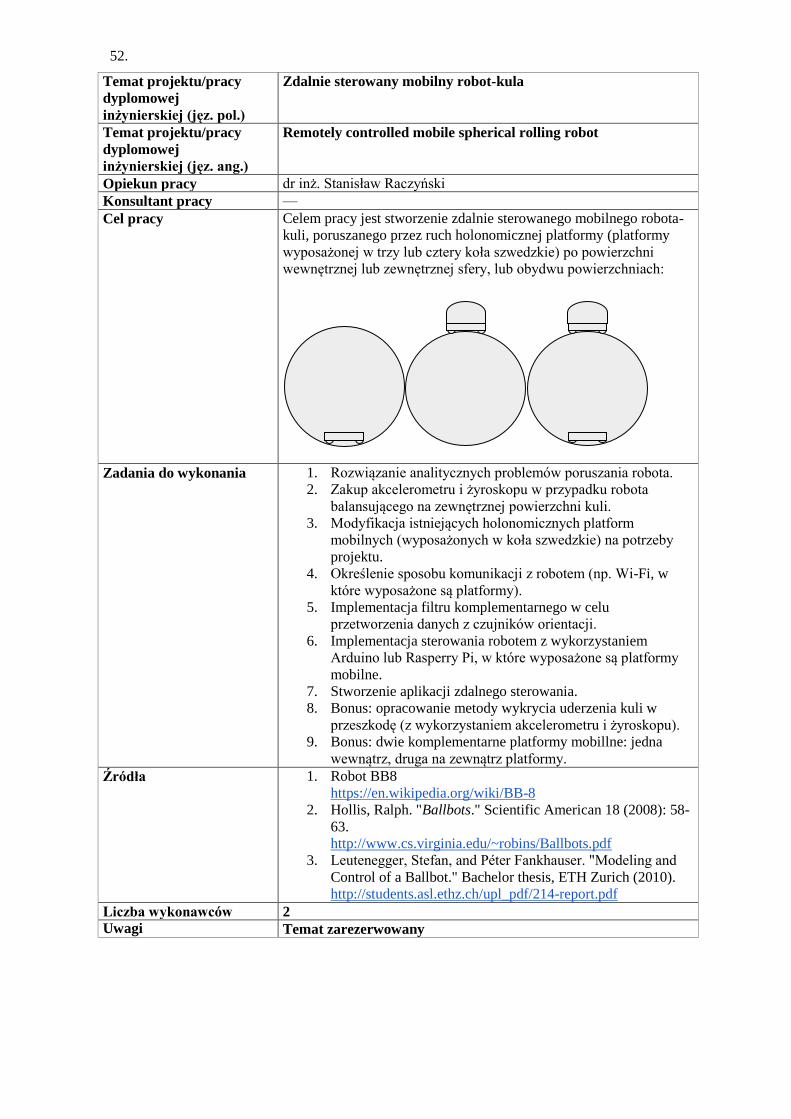
Cel pracy Celem pracy jest stworzenie zdalnie sterowanego mobilnego robota-
kuli, poruszanego przez ruch holonomicznej platformy (platformy
wyposażonej w trzy lub cztery koła szwedzkie) po powierzchni
wewnętrznej lub zewnętrznej sfery, lub obydwu powierzchniach:
Zadania do wykonania 1. Rozwiązanie analitycznych problemów poruszania robota.
2. Zakup akcelerometru i żyroskopu w przypadku robota
balansującego na zewnętrznej powierzchni kuli.
3. Modyfikacja istniejących holonomicznych platform
mobilnych (wyposażonych w koła szwedzkie) na potrzeby
projektu.
4. Określenie sposobu komunikacji z robotem (np. Wi-Fi, w
które wyposażone są platformy).
5. Implementacja filtru komplementarnego w celu
przetworzenia danych z czujników orientacji.
6. Implementacja sterowania robotem z wykorzystaniem
Arduino lub Rasperry Pi, w które wyposażone są platformy
mobilne.
7. Stworzenie aplikacji zdalnego sterowania.
8. Bonus: opracowanie metody wykrycia uderzenia kuli w
przeszkodę (z wykorzystaniem akcelerometru i żyroskopu).
9. Bonus: dwie komplementarne platformy mobillne: jedna
wewnątrz, druga na zewnątrz platformy.
Źródła 1. Robot BB8
https://en.wikipedia.org/wiki/BB-8
2. Hollis, Ralph. "Ballbots." Scientific American 18 (2008): 58-
63.
http://www.cs.virginia.edu/~robins/Ballbots.pdf
3. Leutenegger, Stefan, and Péter Fankhauser. "Modeling and
Control of a Ballbot." Bachelor thesis, ETH Zurich (2010).
http://students.asl.ethz.ch/upl_pdf/214-report.pdf
Liczba wykonawców 2
Uwagi Temat zarezerwowany
53.
Temat projektu/pracy
dyplomowej
inżynierskiej (jęz. pol.)
Manipulator równoległy typu platforma Stewarta
Temat projektu/pracy
dyplomowej
inżynierskiej (jęz. ang.)
Parallel robot: Stewart platform
Opiekun pracy dr inż. Stanisław Raczyński
Konsultant pracy —
Cel pracy Zbudowanie manipulatora równoległego o sześciu stopniach
swobody i implementacja algorytmów sterujących ruchem platformy.
Platforma powinna zostać przetestowana na jakimś prostym zadaniu,
np. balansowaniu piłeczką z wykorzystaniem dżojstika lub kamery.
Zadania do wykonania 1. Projekt mechanicznej konstrukcji platformy (w programie
CAD: Autodesk Inventor, Blender, FreeCAD, Google
SketchUp itd.).
2. Budowa manipulatora z wykorzystaniem serw modelarskich i
gotowych elementów mechanicznych, oraz technologii druku
3D i frezowania CNC.
3. Implementacja równań kinematyki prostej i odwrotnej.
4. Napisanie programu sterującego platformą.
5. Napisanie programu zdalnego poruszania platformą, z
wykorzystaniem np. dżojstika lub kamery zainstalowanej
ponad platformą.
Źródła —
Liczba wykonawców 2
Uwagi Temat zarezerwowany

54.
Temat projektu/pracy
dyplomowej
inżynierskiej (jęz. pol.)
Oprogramowanie wbudowane kwadrokoptera
Temat projektu/pracy
dyplomowej
inżynierskiej (jęz. ang.)
Embedded software for a quadrocopter
Opiekun pracy dr inż. Stanisław Raczyński
Konsultant pracy —
Cel pracy Napisanie oprogramowania dla istniejącego i w pełni sprawnego (za
wyjątkiem oprogramowania) kwadrokoptera. Na pokładzie
kwadrokoptera znajduje się Arduino Uno i Raspberry Pi 2 B.
Zadania do wykonania 1. Zapoznanie się z dokumentacją kwadrokoptera i materiałami
podanymi w źródłach.
2. Implementacja obsługi czujników 9-axis oraz modułu GPS.
3. Implementacja metody estymacji orientacji drona z
wykorzystaniem filtru Kalmana, filtru komplementarnego,
rozszerzonego filtru Kalmana lub filtru Mahoneya-
Magwicka.
4. Uruchomienie oprogramowania ArduPilot lub podobnego na
dostępnym sprzęcie, lub napisanie własnego
oprogramowania.
5. Strojenie regulatorów PID kontrolujących lot drona metodą
Zieglera-Nicholsa.
Źródła 1. Dokumentacja miniaturowego kwadrokoptera.
2. Dokumentacja projektu AeroQuad32
http://aeroquad.com/showwiki.php?title=AeroQuad32-Flight-
Control-Board-v2
3. A. Szwaba, M. Kunt, „Śledzenie obiektu przy pomocy
dronów”, praca dyplomowa magisterska, ETI PG 2015.
4. S. Romaniuk, Z. Gosiewski. „Kalman filter realization for
orientation and position estimation on dedicated processor”,
Acta Mechanica et Automatica 8.2 (2014): 88-94.
5. Arducopter tuning guide video. https://goo.gl/hm8DBg
6. IMU Data Fusing: Complementary, Kalman, and Mahony
Filter, artykuł online http://www.olliw.eu/2013/imu-data-
fusing/
Liczba wykonawców 1–2
Uwagi Temat zarezerwowany
55.
Temat projektu/pracy
dyplomowej
inżynierskiej (jęz. pol.)
System wizyjny do rozpoznawania kart w grach karcianych
Temat projektu/pracy
dyplomowej
inżynierskiej (jęz. ang.)
Computer vision system for identifying cards in card games
Opiekun pracy dr inż. Stanisław Raczyński
Konsultant pracy —
Cel pracy Celem pracy jest zaprojektowanie układu kamer łącznie z
oprogramowaniem, które będą służyć do rozpoznawania kart podczas
gier karcianych. Naszym podstawowym założeniem będzie
zastosowanie tego systemu do odmiany gry poker: texas hold’em.
Każdy gracz będzie siadał do stołu razem z telefonem komórkowym
typu smartfon, na którym będzie zainstalowana aplikacja mobilna
łącząca się z serwerem i przekazująca nagranie wideo. Zgodnie z
założeniami gry, na stole zawodnicy będą przetrzymywali po 2 karty
zakryte na specjalnie przygotowanych do tego, przezroczystych
prostokątach. Telefon umieszczony przez każdego z graczy w
wyznaczonym miejscu pod stołem będzie obserwował jego karty.
Ponad stołem do gry zostanie zamontowany kolejny smartfon, który
będzie rozpoznawał karty widoczne wszystkim graczom (do 5 kart).
System ma być jak najbardziej uniwersalny. W tym celu powstałe
oprogramowanie będzie zorientowane serwisowo, co umożliwi łatwą
zmianę liczby lub zastąpienie telefonów komórkowych innymi
urządzeniami bez dużych zmian w infrastrukturze systemu.
Zadania do wykonania 1. Opracowanie i budowa prototypu stołu do gry w pokera,
2. Przygotowanie aplikacji mobilnej służącej do przesyłania
obrazu wideo na serwer.
3. Rejestracja szeregu nagrań testowych.
4. Stworzenie aplikacji serwera analizującej przychodzące
obrazy wideo.
5. Opracowanie metody wykrywania i identyfikacji kart, np. z
wykorzystaniem cech SIFT lub SURF.
6. Stworzenie aplikacji wyliczającej różne statystyki na
podstawie rozpoznanych kart (np. prawdopodobieństwo
wygranej.
Źródła 1. A. Nandi, „Automating Card Games Using OpenCV and
Python”, artykuł online.
http://arnab.org/blog/so-i-suck-24-automating-card-games-
using-opencv-and-python
2. B. Chen, J. Ankenman, „The Mathematics of Poker”.
Liczba wykonawców 2
Uwagi Temat zarezerwowany
56.
Temat projektu/pracy
dyplomowej
inżynierskiej (jęz. pol.)
Układ do rejestracji i analizy zmian parametrów fizjologicznych
osób przebywających w komorze hiperbarycznej lub barycznej
Temat projektu/pracy
dyplomowej
inżynierskiej (jęz. ang.)
A system for registration and analysis of changes of physiological
parameters of persons staying in the hyperbaric or barometric
chamber.
Opiekun pracy dr inż. Stefan Sieklicki
Konsultant pracy prof. dr hab. med. Janusz Siebert
Cel pracy Opracowanie sposobu rejestracji i analizy zmian parametrów
fizjologicznych osób przebywających w komorze hiperbarycznej lub
barycznej
Zadania do wykonania Do zadań dyplomanta będzie należało:
1. Dokonanie rejestracji wybranych parametrów istniejącego stanu
fizjologicznego.
2. Opracowanie i uruchomienie systemu analizy pozwalającego na
uzyskanie danych o zmianach parametrów fizjologicznych osób
przebywających w komorze hiperbarycznej lub barycznej
Źródła hiperbaria.wroc.pl ,
www.automatyka.siemens.pl/solutionandproducts_ia/11105.htm
www.mpl.pl/, www.eduteka.pl/temat/Komora-baryczna
Liczba wykonawców 2
Uwagi W pracy należy opracować system rejestracji zmiany wybranych parametrów fizjologicznych w czasie użytkowania komór barycznych i uruchomić system analizy pozwalający na uzyskanie informacji o zmianach parametrów atmosfery w komorze. Działanie komory barycznej ma wpływ na poprawę parametrów fizjologicznych i warto przeprowadzić analizę zmian wskutek działania komory.
57.
Temat projektu/pracy
dyplomowej
inżynierskiej (jęz. pol.)
Układ do rejestracji i analizy kaszlu
Temat projektu/pracy
dyplomowej
inżynierskiej (jęz. ang.)
A system for registration and analysis of cough
Opiekun pracy dr inż. Stefan Sieklicki
Konsultant pracy dr inż. Stanisław Raczyński
Cel pracy Projekt i realizacja układu pomiaru i analizy sygnałów kaszlu
Zadania do wykonania Do zadań dyplomanta będzie należało:
1. Zaprojektowanie układu elektronicznego
2. Realizacja układu elektronicznego w oparciu o mikrokontroler
3. Opracowanie oprogramowania na mikrokontroler
4. Opracowanie oprogramowania pozwalającego na przenoszenie
danych za pomocą pamięci USB
Źródła Wibroakustyczny System Rejestracji Kaszlu MEPIM,M. Krajnik , M.
Grabowski
Liczba wykonawców 2
Uwagi Pomiar i analiza kaszlu daje możliwość identyfikacji zaburzeń
fizjologicznych u pacjenta na podstawie powtarzających się cyklicznie przebiegów zmian sygnałów kaszlu

58.
Temat projektu/pracy
dyplomowej
inżynierskiej (jęz. pol.)
Określenie położenia kończyny na podstawie analizy sygnałów
elektrycznej aktywności mięśniowej (EMG).
Temat projektu/pracy
dyplomowej
inżynierskiej (jęz. ang.)
Limb position determination based on electro-myography (EMG)
signal analysis
Opiekun pracy dr inż. Stefan Sieklicki
Konsultant pracy dr inż. Wiktor Sieklicki (Wydz. Mechaniczny)
Cel pracy Zaprojektowanie i zbudowanie wzmacniacza sygnałów EMG o 6
kanałach wejściowych, który będzie realizował rejestrację sygnałów
EMG a następnie będzie przekazywał dane do komputera PC celem
późniejszej analizy. Zadaniem systemu ma być ustalenie położenia
wybranej kończyny człowieka na podstawie zarejestrowanych
sygnałów.
Zadania do wykonania 1. Zaprojektowanie i zbudowanie wzmacniacza o 6 kanałach
wejściowych z możliwością rejestracji i eksportu przebiegów
sygnałów mierzonych do komputera PC w czasie rzeczywistym
lub ich późniejszego eksportu do komputera PC,
2. Napisanie programu interpretującego bieżący sygnał EMG na
podstawie zarejestrowanych przebiegów w wybranych kanałach
i na tej podstawie, określenia aktualnego położenia kończyny
człowieka.
Źródła www.analizaruchu.awf.wroc.pl/materialy/abcemg.pdf
Liczba wykonawców 2
Uwagi
59.
Temat projektu/pracy
dyplomowej
inżynierskiej (jęz. pol.)
Określenie położenia kończyny na podstawie analizy sygnałów
elektrycznych z akcelerometrów.
Temat projektu/pracy
dyplomowej
inżynierskiej (jęz. ang.)
Limb position determination based on an analysis of electrical
signals from accelerometers.
Opiekun pracy dr inż. Stefan Sieklicki
Konsultant pracy dr inż. Wiktor Sieklicki (Wydz. Mechaniczny)
Cel pracy Zaprojektowanie i zbudowanie systemu rejestracji sygnałów
celem wykorzystania tych sygnałów do ustalenia położenia kończyn.
Zadania do wykonania 1. Zaprojektowanie i zbudowanie układu pomiarowego na bazie
akcelerometrów i sterowanego układem mikroprocesorowym,
2. Zaprojektowanie i zbudowanie wzmacniacza o odpowiedniej
ilości kanałów wejściowych do tego aby można było na
podstawie mierzonych sygnałów identyfikować położenie
kończyn.
Źródła http://www.dbc.wroc.pl/Content/4083/Synergizm_miesniowww.anali
zaruchu.awf.wroc.pl/materialy/abcemg.pdf
www.analizaruchu.awf.wroc.pl/materialy/abcemg.pdf
Liczba wykonawców 2
Uwagi

60.
Temat projektu/pracy
dyplomowej
inżynierskiej (jęz. pol.)
Generator zmiennych napięć sterujących matą elektryczną
wytwarzającą pole elektromagnetyczne.
Temat projektu/pracy
dyplomowej
inżynierskiej (jęz. ang.)
System for controlling electric mat that generates electromagnetic
field
Opiekun pracy dr inż. Stefan Sieklicki
Konsultant pracy prof. dr hab. med. Janusz Siebert , dr inż. Wiktor Sieklicki (Wydz.
Mechaniczny), dr inż. Piotr Kaczmarek PG ETI KSA
Cel pracy Opracowanie układu programowalnego generatora zmiennych napięć
służących do generacji pola elektromagnetycznego
Zadania do wykonania Do zadań dyplomanta będzie należało:
1. Analiza parametrów istniejących urządzeń.
2. Opracować projektu i zbudowanie generatora zmiennych
napięć sterujących matą elektryczną
Źródła http://pliki.biomagnetica.pl/ADR%20Mat.pdf ,
http://sklep.astar.pl/aparaty-do-elektroterapii/341-hi-top-2-touch-
dwukanalowy-aparat-do-terapii-energotonowej.html
www.automatyka.siemens.pl/solutionandproducts_ia/11105.htm
www.mpl.pl/,
Liczba wykonawców 2
Uwagi W pracy należy opracować system programowalnego układu
generatora zmiennych napięć elektrycznych
61.
Temat projektu/pracy
dyplomowej
inżynierskiej (jęz. pol.)
Oprogramowanie konfigurowalnej skrzyni biegów.( skrzynia
biegów wyposażona w serwomechanizmy)
Temat projektu/pracy
dyplomowej
inżynierskiej (jęz. ang.)
Software for configurable gearbox.
Opiekun pracy dr inż. Stefan Sieklicki
Konsultant pracy dr. inż. Piotr Kaczmarek
Cel pracy Opracowanie i implementacja algorytmów sterowania
konfigurowalną skrzynią biegów.
Zadania do wykonania 1. Analiza istniejących skrzyń biegów.
2. Opracowanie koncepcji sterowania zmianą biegów.
3. Opracowanie sposobu ręcznej zmiany biegów.
4. Implementacja algorytmów.
5. Testy w środowisku rzeczywistym.
6. Omówienie wyników testów oraz propozycje zastosowań
rozwiązania.
Źródła 1. Lozia Z., Symulator jazdy samochodem. Wydawnictwo
Komunikacji i Łączności, Warszawa 2008.
2. Micknass W., Popiol R., Sprender A., Sprzęgła, skrzynki biegów,
wały i półosie napędowe. Wydawnictwo Komunikacji i Łączności,
Warszawa 2005.
Liczba wykonawców 2
Uwagi Temat zarezerwowany