tema 5 percepcin-hptica
TRANSCRIPT
Master en Informática Master en Informática Gráfica, Juegos y Realidad Gráfica, Juegos y Realidad VirtualVirtual
Tema Tema 5: 5: Percepción Percepción
José San Martín
Tema Tema 5: 5: Percepción Percepción hápticaháptica

IntroducciónIntroducción
La percepción háptica se basa en señales sensoriales que surgen de la interacción háptica con entornos reales o virtuales.
La interacción háptica incluye variables mecánicas, como fuerzas, momentos, dureza, etc y que proviene
Dispositivos Dispositivos HápticosHápticos para Tacto para Tacto VirtualVirtual 22
como fuerzas, momentos, dureza, etc y que proviene de las características físicas de aquello que se toca, pero también de la persona que toca, que percibe.

IntroducciónIntroducción
Los entornos reales proporcionan estas señales mecánicas mediante la interacción con los objetos que tocamos y sus características.
De los entornos virtuales obtenemos las señales sensoriales desde señales mecánicas generadas por
Dispositivos Dispositivos HápticosHápticos para Tacto para Tacto VirtualVirtual 33
sensoriales desde señales mecánicas generadas por computador a través de dispositivos hápticos.
Si bien los dispositivos hápticos pretender simular la realidad reproduciendo señales mecánicas que podemos encontrar en el mundo real, es mucho más interesante que puedan producir además señales que no podríamos encontrar en un entorno real.

IntroducciónIntroducción
De este modo nuestro entorno virtual puede contener una percepción sensorial totalmente nueva.
En este sentido, los dispositivos hápticos hacen por la percepción lo mismo que los gráficos por computador a la visión real.
Dispositivos Dispositivos HápticosHápticos para Tacto para Tacto VirtualVirtual 44
computador a la visión real.

IntroducciónIntroducción
Por ejemplo, cuando exploramos con la mano una superficie, debemos tener en cuenta las variables relacionadas con el cuerpo, como el movimiento de las manos del que percibe.
Por otro lado también influyen las fuerzas de
Dispositivos Dispositivos HápticosHápticos para Tacto para Tacto VirtualVirtual 55
Por otro lado también influyen las fuerzas de contacto con el objeto que tocamos, y finalmente las características del entorno, es decir, las características como suavidad o dureza del material que tocamos.

Interacción Interacción hápticaháptica y Percepción y Percepción hápticaháptica
La interacción que se produce entre las distancias variables mecánicas y el que percibe es esencial en la percepción háptico.
De esta manera se relaciona las acciones del que percibe con las reacciones del entorno. Esta relación
Dispositivos Dispositivos HápticosHápticos para Tacto para Tacto VirtualVirtual 66
percibe con las reacciones del entorno. Esta relación es bidireccional y las reacciones del entorno tienen efecto en las nuevas acciones del que percibe.
Así pues definimos como señal háptica a la información útil proporcionada por una variable mecánica.

Interacción Interacción hápticaháptica y Percepción y Percepción hápticaháptica
Un conjunto de señales háptica actuando en consonancia definen un estímulo háptico.
Finalmente varios estímulos hápticos van a conformar un entorno háptico, definiendo las características de todos los objetos que van a estar
Dispositivos Dispositivos HápticosHápticos para Tacto para Tacto VirtualVirtual 77
características de todos los objetos que van a estar contenidos en ese entorno.
Todo las definiciones anteriores son indenpendientes de si el entorno es virtual (creado artificialmente con base tecnológica) o real.
Percepción Percepción hápticaháptica
Como hemos dicho la percepción háptica se basa en aspectos físicos de la interacción háptica, pero evidentemente estas señales son percibidas según el sistema nervioso del que percibe.
Para poder estudiar correctamente la percepción háptica debemos controlar los estímulos que suceden con el entorno. Esto supone controlar sistemáticamente la variación de estos
Dispositivos Dispositivos HápticosHápticos para Tacto para Tacto VirtualVirtual 88
Esto supone controlar sistemáticamente la variación de estos estímulos hápticos.
Por ejemplo, si estudiamos la forma de un objeto, factores importantes como las fuerzas que se experimentan deberían ser controladas o modificadas, depende del efecto requerido.

Percepción Percepción hápticaháptica
Es una tarea difícil ya que normalmente es complicado realizar una medición exacta y un control de las señales mecánicas dentro de un experimento de percepción háptica.
No obstante, avances recientes en la tecnología de
Dispositivos Dispositivos HápticosHápticos para Tacto para Tacto VirtualVirtual 99
No obstante, avances recientes en la tecnología de los hápticos permiten un control mucho mayor de esas fuerzas obtenido en el dispositivo.

Percepción Percepción hápticaháptica
Los elementos dispositivos hápticos que están en contacto con el que percibe, desde el punto de vista de la percepción se denominan Manipulandums.
Por tanto elementos controlados por computador que son capaces de generar señales mecánicas hápticas.
Dispositivos Dispositivos HápticosHápticos para Tacto para Tacto VirtualVirtual 1010
son capaces de generar señales mecánicas hápticas. Así pues las definiciones de Espacio de trabajo son válidas desde el punto de vista de la percepción, siendo una característica intrínseca del dispositivo.

Percepción Percepción hápticaháptica
Pudiendo ser el dispositivo de tipo activo o pasivo, nos encontramos con las siguientes diferencias: los dispositivos pasivos van a ser aquellos en los que el usuario aplica energía al dispositivo, aplicando fuerzas por ejemplo, y el sistema produce una disipación de energía.
Dispositivos Dispositivos HápticosHápticos para Tacto para Tacto VirtualVirtual 1111
disipación de energía.
Por otro lado, los activos van a facilitar una energía al usuario, en forma de fuerzas creadas por actuadores.

Percepción Percepción hápticaháptica
Dispositivos Dispositivos HápticosHápticos para Tacto para Tacto VirtualVirtual 1212

Percepción Percepción hápticaháptica
En la definición del software de haptic rendering, se establece un modelo de contacto que permita computar las fuerzas necesarias en la interacción mecánica.
Estas fuerzas son percibidas por el usuario a través
Dispositivos Dispositivos HápticosHápticos para Tacto para Tacto VirtualVirtual 1313
Estas fuerzas son percibidas por el usuario a través del manipulandum. Una vez que no se encuentra en el entorno virtual, el usuario no siente fuerzas ya que el software de renderizado deja de crearlas.

HápticosHápticos en Percepciónen Percepción
Las razones de la importancia de los hápticos en percepción serían:
1) Permiten reproducir señales hápticas del mundo real. Por ejemplo versiones virtuales de elementos existentes.
Dispositivos Dispositivos HápticosHápticos para Tacto para Tacto VirtualVirtual 1414
existentes.
2) Permiten modificar dinámicamente las propiedades mecánicas de los objetos virtuales. Por ejemplo modificar el espesor de un objeto o su dureza.
HápticosHápticos en Percepciónen Percepción
3) Permite crear un objeto virtual que no existe en el mundo real. Por ejemplo crear escenarios virtuales en los que no rijan las leyes de la física tradicional.
4) Permite relacionar de manera cuantitativa las
Dispositivos Dispositivos HápticosHápticos para Tacto para Tacto VirtualVirtual 1515
4) Permite relacionar de manera cuantitativa las acciones del usurario que percibe con las señales hápticas. Por ejemplo las señales mecánicas que recibe un usuario pueden ser grabadas y almacenadas para su posterior análisis y estudio.
HápticosHápticos en Percepciónen Percepción
Dado que muchas actividades precisan del uso de herramientas, es posible que sean necesarias para interactuar con objetos virtuales.
No obstante tocar un objeto virtual con el dedo directamente permite tener una información mucho
Dispositivos Dispositivos HápticosHápticos para Tacto para Tacto VirtualVirtual 1616
directamente permite tener una información mucho más completa.
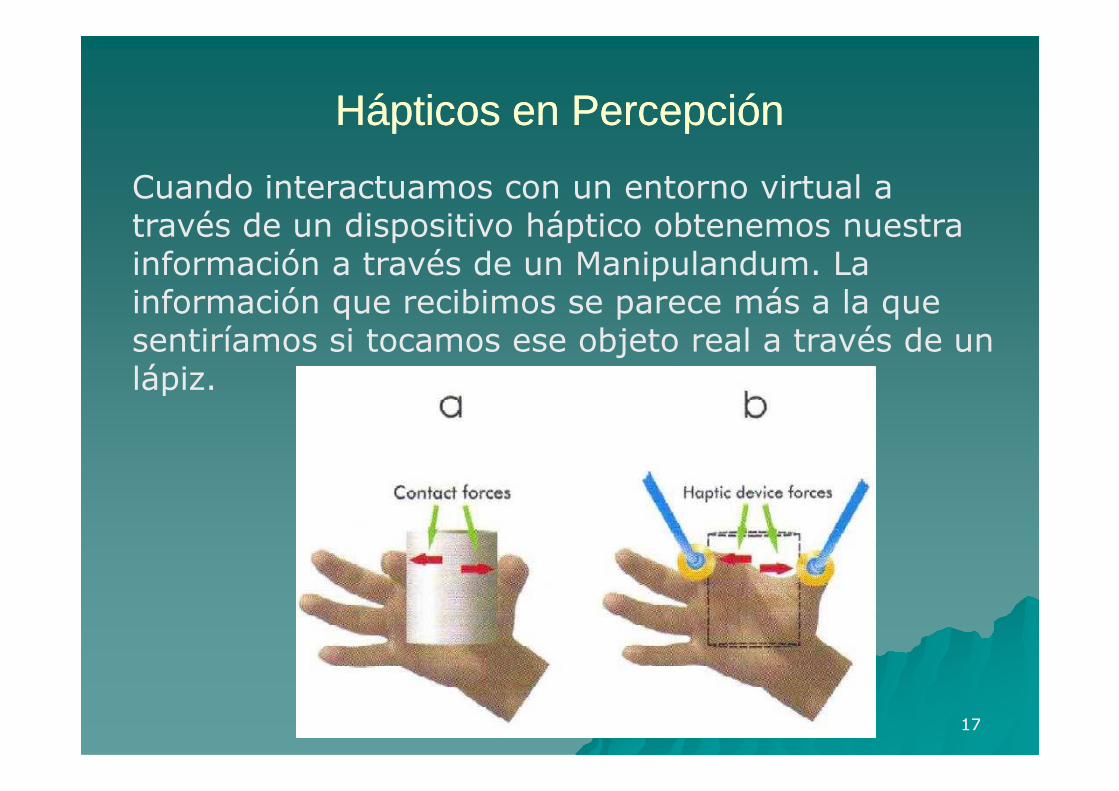
Existe una información cutánea, como por ejemplo la que proviene de la deformación de la piel en contacto con el objeto.
HápticosHápticos en Percepciónen Percepción
Cuando interactuamos con un entorno virtual a través de un dispositivo háptico obtenemos nuestra información a través de un Manipulandum. La información que recibimos se parece más a la que sentiríamos si tocamos ese objeto real a través de un lápiz.
Dispositivos Dispositivos HápticosHápticos para Tacto para Tacto VirtualVirtual 1717
lápiz.
HápticosHápticos en Percepciónen Percepción
Un háptico tiene un número limitado de sensores y actuadores.
Manejando un háptico, los sensores van a determinar una posición en el espacio tridimensional, aplicando fuerzas en esa posición.
Dispositivos Dispositivos HápticosHápticos para Tacto para Tacto VirtualVirtual 1818
fuerzas en esa posición.
La resolución de las fuerzas creadas es finita y dependerá de la resolución en bits con la que trabajamos.

Definición de eventosDefinición de eventos
Cuando interactuamos con un entorno virtual podemos encontrarnos con los diferentes eventos.
Para estudiar el caso simplificamos el entorno, de manera que consideramos que el objeto solo es tocado por un solo dedo y que éste es mucho menor
Dispositivos Dispositivos HápticosHápticos para Tacto para Tacto VirtualVirtual 1919
tocado por un solo dedo y que éste es mucho menor que el objeto.
También se considera que el objeto si bien puede ser deformable, no lo podemos mover.

Eventos interacción mundo realEventos interacción mundo real
• Antes del contacto con un objeto en el mundo real, el usuario no percibe nada, no existen fuerzas externas.
•Cuando el dedo del usuario roca un objeto, aplica fuerzas sobre el objeto. Por acción-reacción siente
Dispositivos Dispositivos HápticosHápticos para Tacto para Tacto VirtualVirtual 2020
fuerzas sobre el objeto. Por acción-reacción siente fuerzas de contacto desde el objeto.
•La aplicación/recepción de fuerzas se realiza a través de músculos del cuerpo y de las variación de la aceleración de su dedo.

Eventos interacción mundo virtualEventos interacción mundo virtual
• Antes de entrar en contacto con algún objeto del entorno virtual el usuario siente varias señales mecánicas, por ejemplo el peso y las características de rugosidad del Manipulandum.
•Durante la interacción con el objeto virtual, el
Dispositivos Dispositivos HápticosHápticos para Tacto para Tacto VirtualVirtual 2121
•Durante la interacción con el objeto virtual, el usuario sigue sintiendo las señales hápticas definidas anteriormente. Estas señales, que son en realidad del mundo real, se mezclan con las señales que produce el sistema al tocar el objeto virtual.

Diseño de experimentos de percepción Diseño de experimentos de percepción hápticaháptica
Un experimento de percepción háptica debe tener en cuenta que físicamente el usuario puede cansarse y debe contarse con esta variable y programarse descansos.
Es necesario un estudio de la seguridad del
Dispositivos Dispositivos HápticosHápticos para Tacto para Tacto VirtualVirtual 2222
Es necesario un estudio de la seguridad del experimento, de manera que si no están adecuadamente manejados, algunos sistemas puedes golpear y dañar al usuario.

Diseño de experimentos de percepción Diseño de experimentos de percepción hápticaháptica
Configuración del dispositivo al usuario. De acuerdo a la características del usuario, puede ser necesario un recalibrado del dispositivo para tener en cuenta esas variaciones.
Por último tener en cuenta que independientemente
Dispositivos Dispositivos HápticosHápticos para Tacto para Tacto VirtualVirtual 2323
Por último tener en cuenta que independientemente de las instrucciones dadas al usuario que participa en el experimento, no va a realizar en muchos casos las acciones exactamente como se desea.

BibliografíaBibliografía�� LedermanLederman, S. J., & , S. J., & KlatzkyKlatzky, R. L. (1990). Haptic , R. L. (1990). Haptic classificationclassification of of
commoncommon objectsobjects: : KnowledgeKnowledge--drivendriven explorationexploration. . CognitiveCognitivePsychologyPsychology, 22, 421, 22, 421--459.459.
�� GrunwaldGrunwald, M. (Ed.) 2008. , M. (Ed.) 2008. HumanHuman Haptic Haptic PerceptionPerception -- BasicsBasics and and ApplicationsApplications. . BaselBasel/Boston//Boston/BerlinBerlin: : BirkhaeuserBirkhaeuser VerlagVerlag. ISBN 978. ISBN 978--33--76437643--76117611--66
�� RoblesRobles--DeDe--LaLa--Torre G. Torre G. PrinciplesPrinciples of Haptic of Haptic PerceptionPerception in Virtual in Virtual
Dispositivos Dispositivos HápticosHápticos para Tacto para Tacto VirtualVirtual 2424
�� RoblesRobles--DeDe--LaLa--Torre G. Torre G. PrinciplesPrinciples of Haptic of Haptic PerceptionPerception in Virtual in Virtual EnvironmentsEnvironments. In . In GrunwaldGrunwald M (Ed.), M (Ed.), HumanHuman Haptic Haptic PerceptionPerception, , BirkhäuserBirkhäuser VerlagVerlag, 2008., 2008.
�� ForrestForrest, N., , N., BaillieBaillie, S. and Tan, H.Z. (2009) Haptic , S. and Tan, H.Z. (2009) Haptic stiffnessstiffnessidentificationidentification byby veterinariansveterinarians and and novicesnovices:: A A comparisoncomparison. . ProceedingsProceedings of of thethe 2009 2009 WorldWorld HapticsHaptics ConferenceConference (WHC09), Salt (WHC09), Salt Lake City, UT, USA pp. 646Lake City, UT, USA pp. 646––651.651.
�� Ming C. Ming C. LinLin and Miguel A. and Miguel A. OtaduyOtaduy ((editorseditors). Haptic ). Haptic RenderingRendering: : FoundationsFoundations, , AlgorithmsAlgorithms, and , and ApplicationsApplications. AK . AK PetersPeters. 2008. . 2008.