team a7: the robotiers jeff ivey: journalism, writing aaron maharry: programming, mechanical design,...
TRANSCRIPT
Team A7: The Robotiers
Jeff Ivey: Journalism, Writing
Aaron Maharry: Programming, Mechanical Design, Construction
Dan Sobchuk: Construction, Testing
Luke Stegman: Programming, Testing
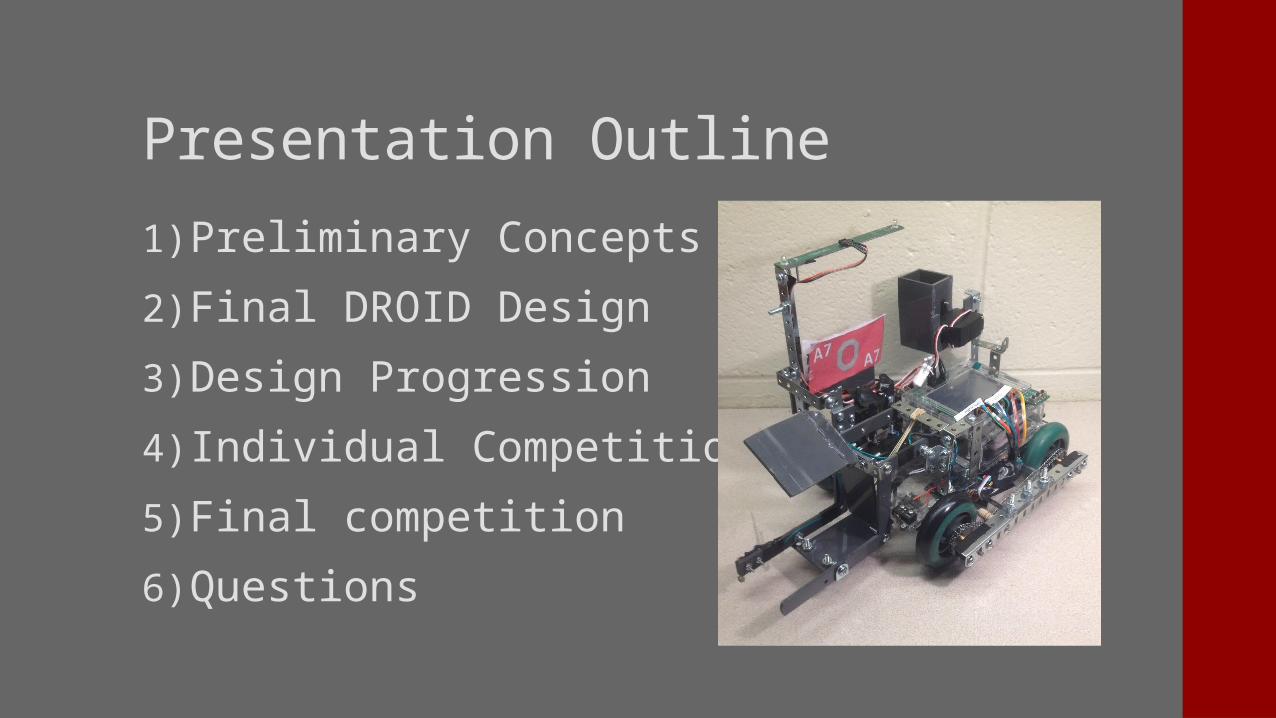
Presentation Outline
1) Preliminary Concepts
2) Final DROID Design
3) Design Progression
4) Individual Competition
5) Final competition
6) Questions
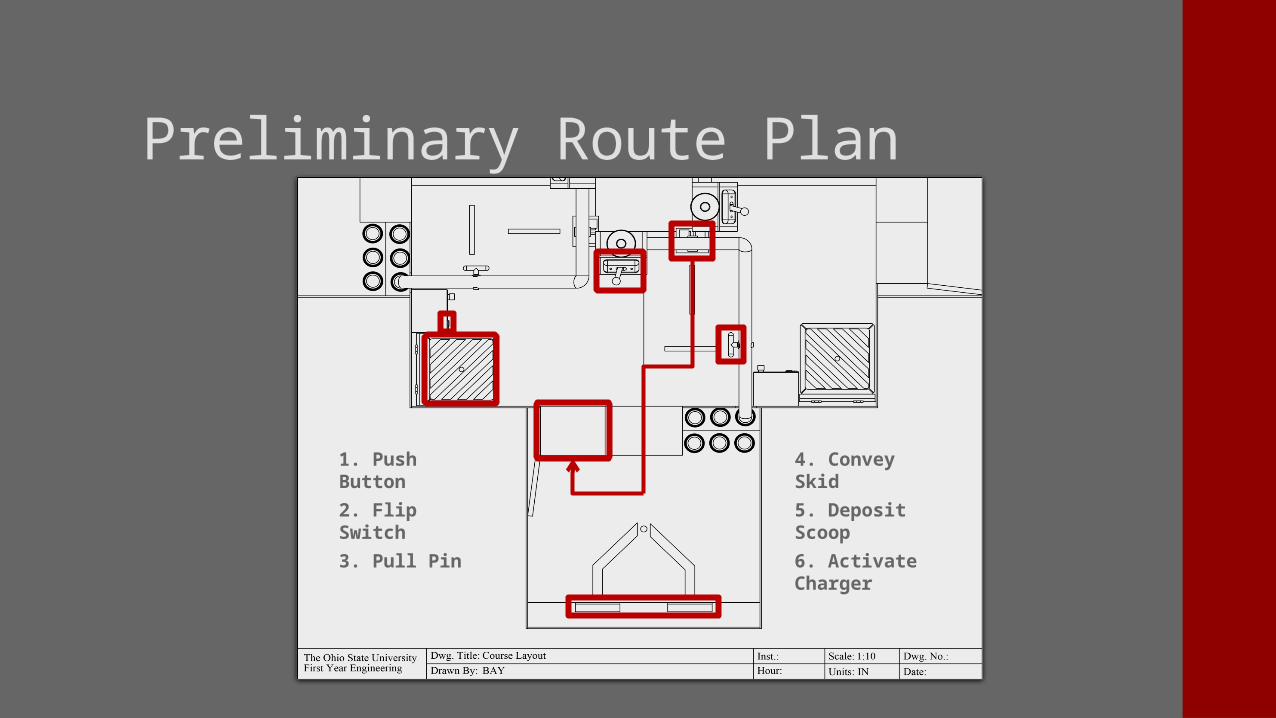
Preliminary Route Plan
1. Push Button
2. Flip Switch
3. Pull Pin 6. Activate Charger
5. Deposit Scoop
4. Convey Skid
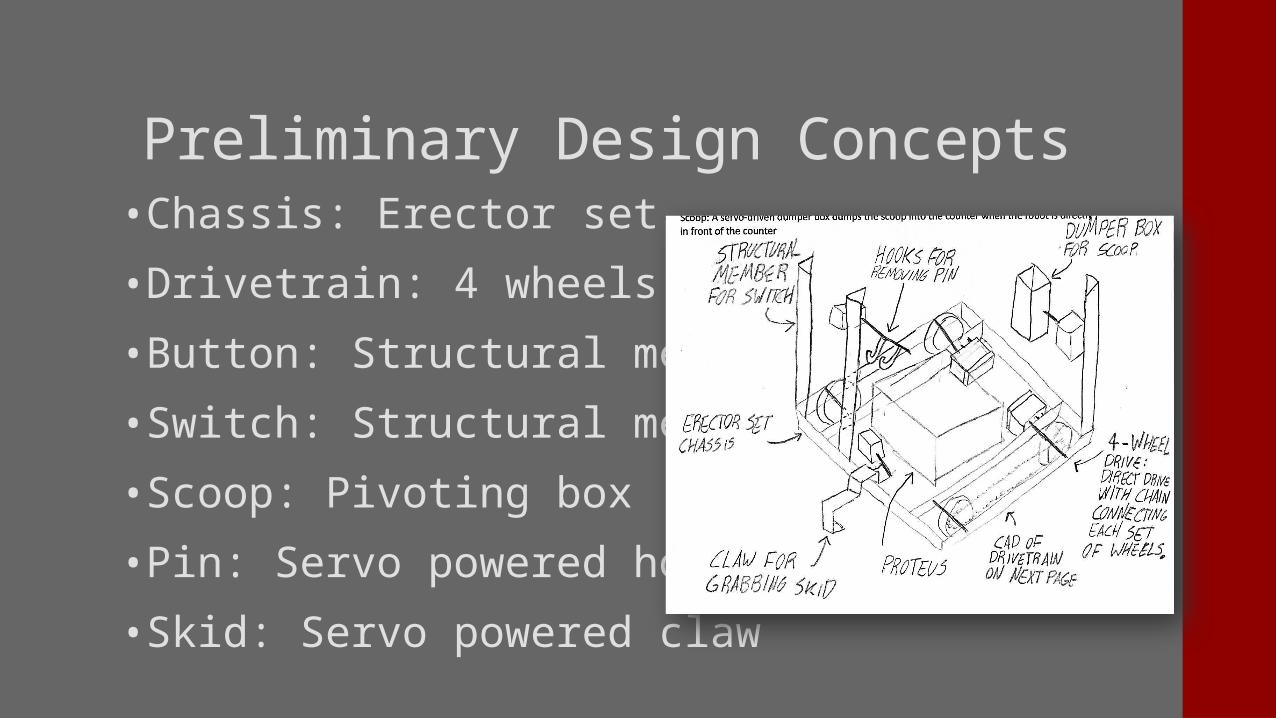
Preliminary Design Concepts•Chassis: Erector set
•Drivetrain: 4 wheels
•Button: Structural member
•Switch: Structural member
•Scoop: Pivoting box
•Pin: Servo powered hooks
•Skid: Servo powered claw
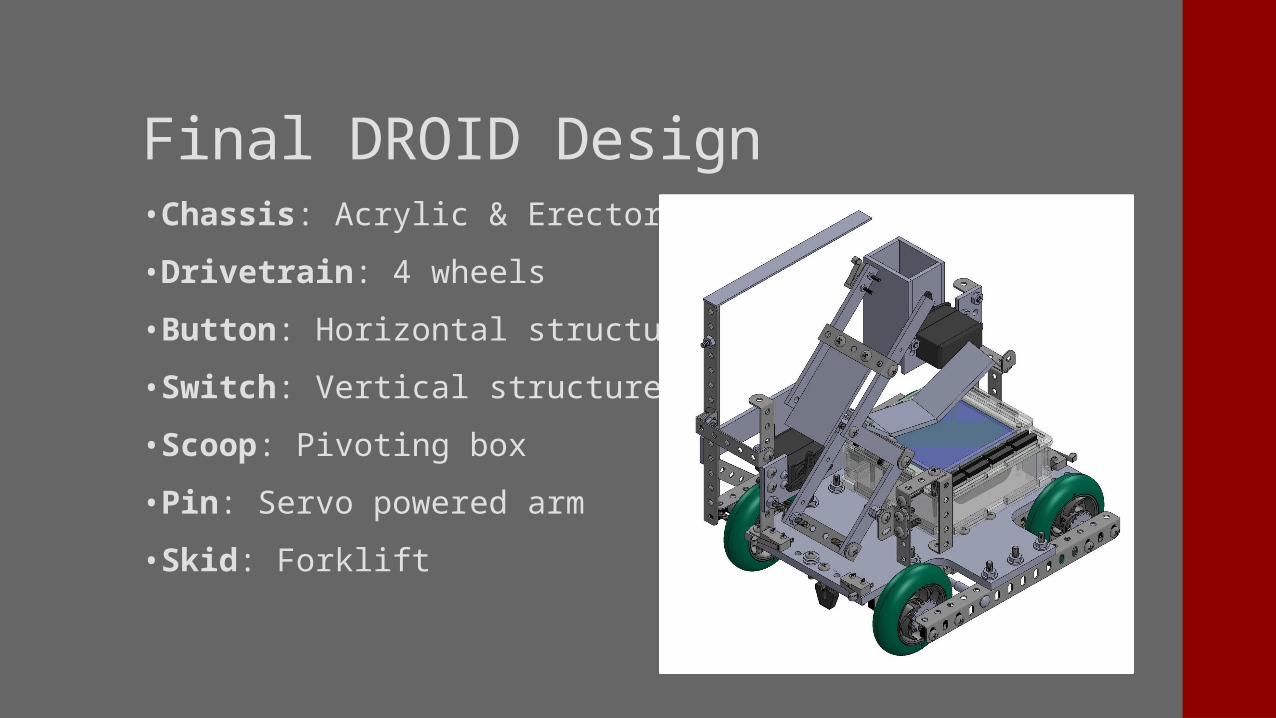
Final DROID Design• Chassis: Acrylic & Erector set
• Drivetrain: 4 wheels
• Button: Horizontal structure
• Switch: Vertical structure
• Scoop: Pivoting box
• Pin: Servo powered arm
• Skid: Forklift
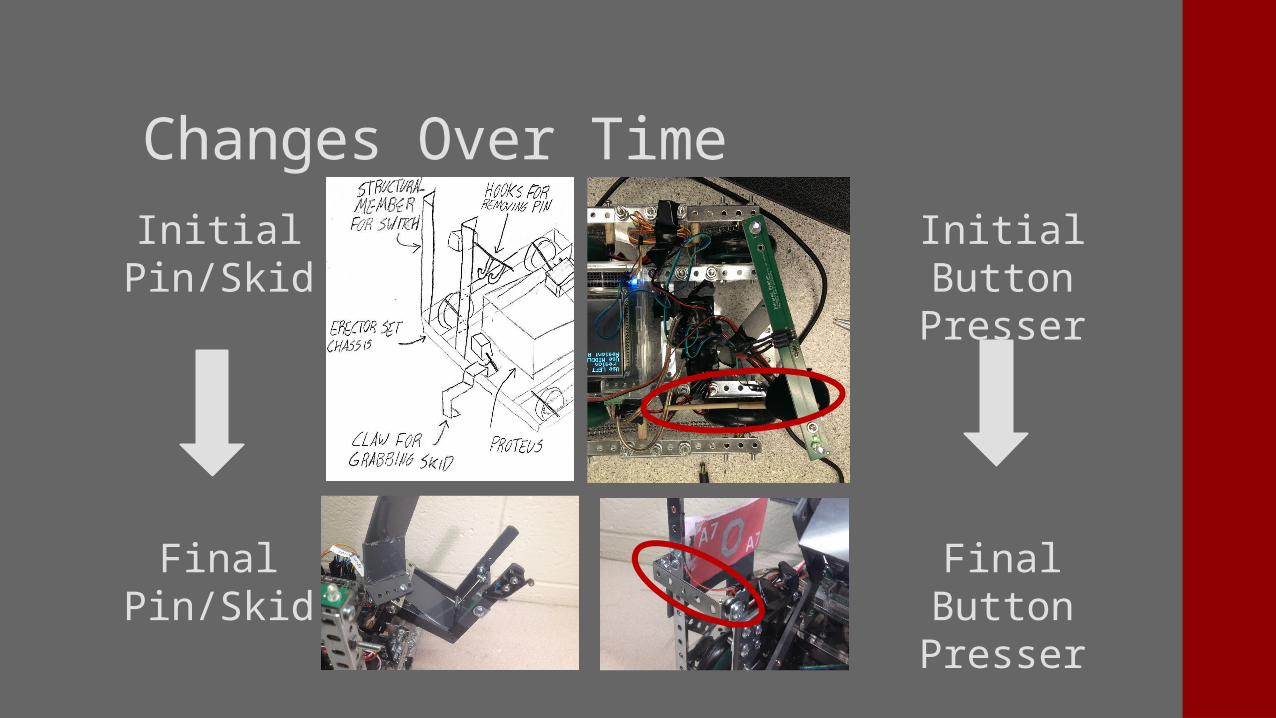
Changes Over Time Initial
Pin/Skid
Final Pin/Skid
Initial Button Presser
Final Button Presser
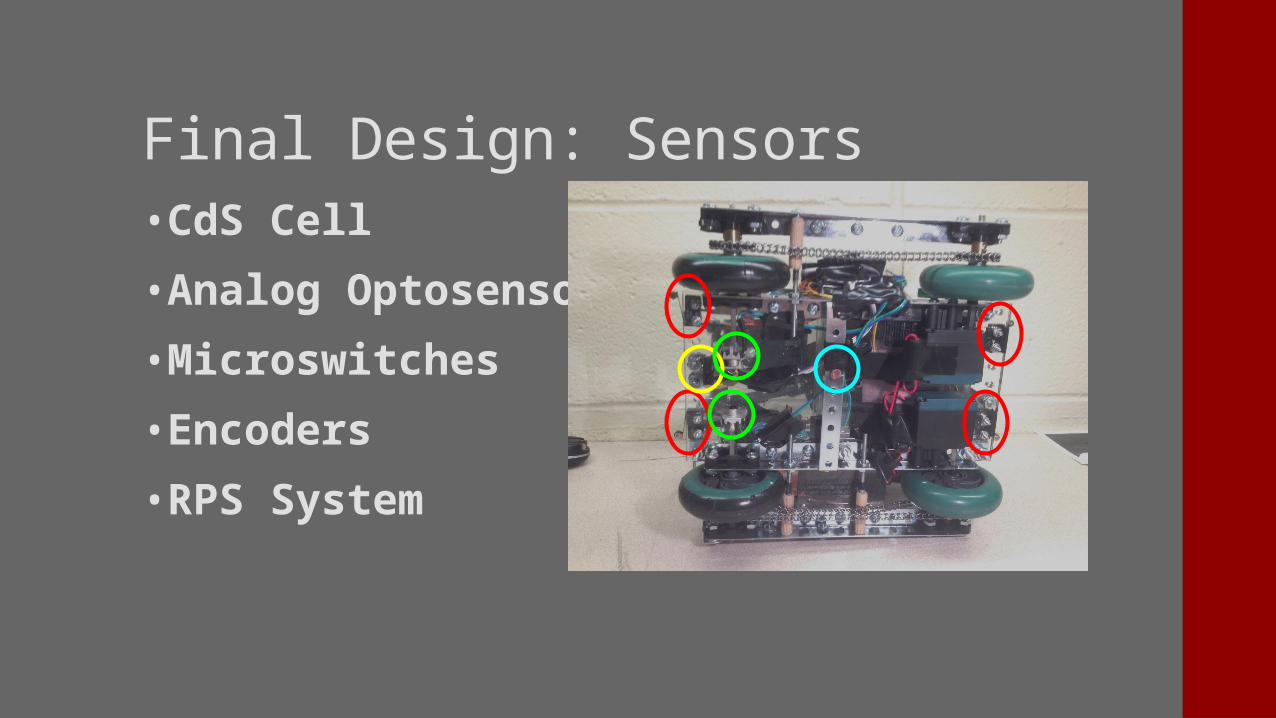
Final Design: Sensors •CdS Cell
•Analog Optosensor
•Microswitches
•Encoders
•RPS System
Insert Picture
Final Code• Classes for Drive and IO, and Timer
• Scripting and final script components
• Driving:Encoder distance drivingEncoder and RPS turnsProportional control when driving to switch
Final Budget•Total Spent: $147.93
•Amount Remaining: $12.07
•Amount Spent on Motors: $44.00
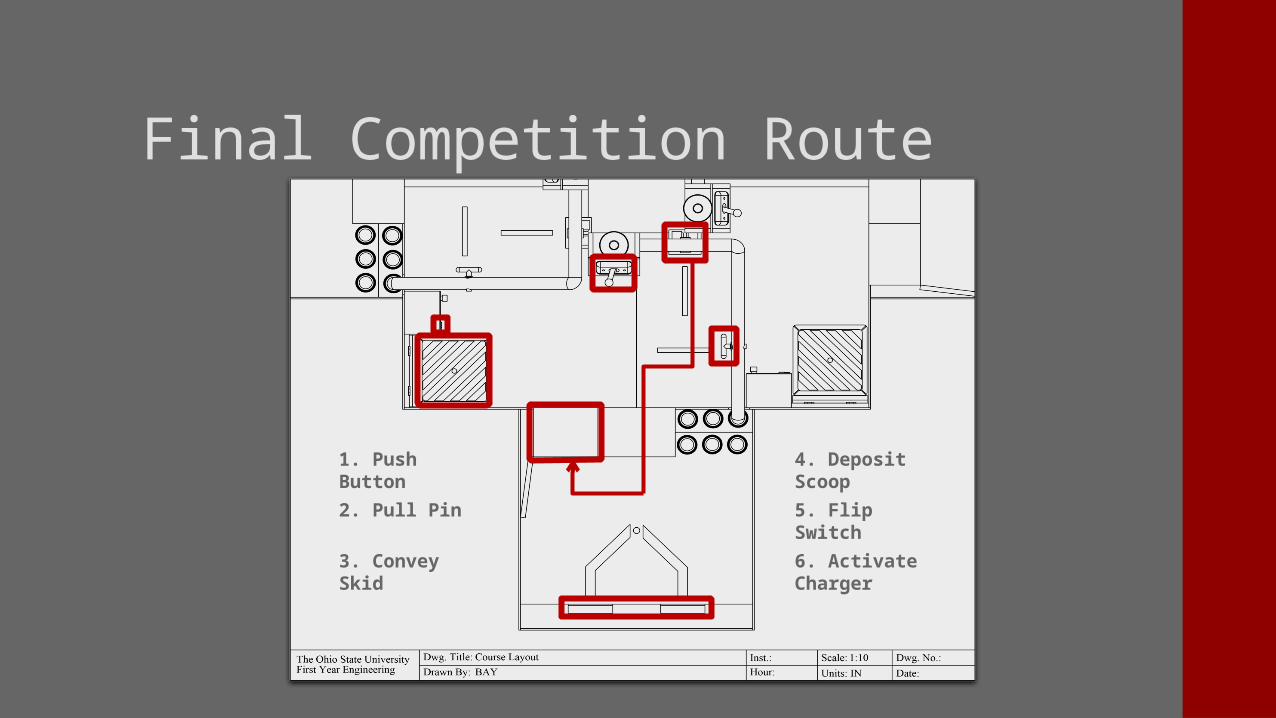
Final Competition Route
1. Push Button
2. Pull Pin
3. Convey Skid 6. Activate Charger
5. Flip Switch
4. Deposit Scoop
Individual Competition Results• First Round:
Failed early Scored 25
• Second Round: Failed early Scored 5
• Third Round: Did not press button, activate charger Scored 46
Changes For Final Competition• Switched to encoder turns
Still retained two RPS turns
• Modified the driving script for:Driving down the RAMPDriving to the line by the PIN
• Adjusted light thresholds for new lighting
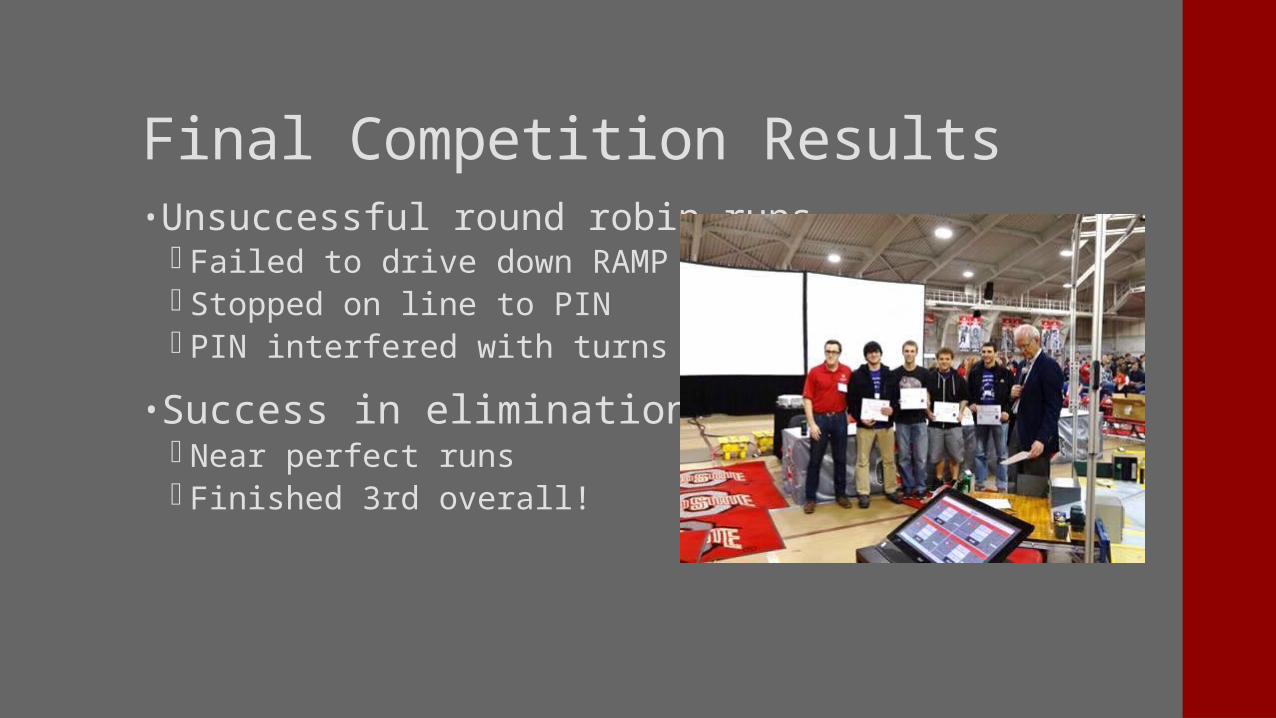
Final Competition Results• Unsuccessful round robin runs
Failed to drive down RAMP Stopped on line to PIN PIN interfered with turns
• Success in elimination round Near perfect runs Finished 3rd overall!
Analysis of Competition• Light detection problems
• Success depended on RPS
• PIN security problems
• Overall success
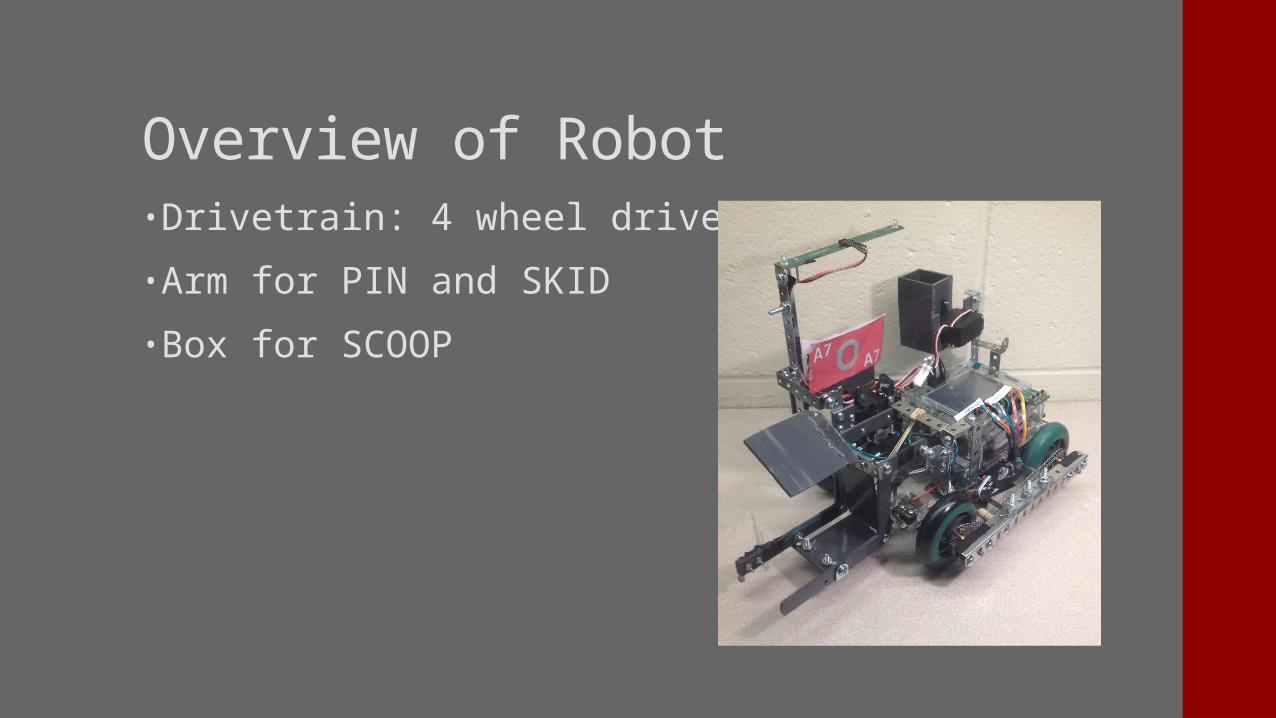
Overview of Robot • Drivetrain: 4 wheel drive
• Arm for PIN and SKID
• Box for SCOOP
Summary of Performance• No electrical or system issues
• Performed well on Performance Tests
• Inconsistent in Individual Competition Ranked 10th
• 3rd Place in Final Completion
Questions?