t.c. - teknikbelgeler.com · kontrol hesabı ... Şekil ì kapalı devre hidrolik sistemin...
TRANSCRIPT

T.C.
GAZİ ÜNİVERSİTESİ
MÜHENDİSLİK FAKÜLTESİ
MAKİNE MÜHENDİSLİĞİ BÖLÜMÜ
MM 403 MEKANİK SİSTEM TASARIMI
DÖNEM İÇİ PROJESİ
091155081 Ahmet Yağız TUNCEL
2014

2
İçindekiler İçindekiler ........................................................................................................................................... 2
Şekiller ................................................................................................................................................ 4
Tablolar............................................................................................................................................... 5
Figure .................................................................................................................................................. 5
1.TORK NEDİR ..................................................................................................................................... 6
1.1 Tork Konvertör Nedir ............................................................................................................... 8
1.2 Kavrama Nedir ve Nasıl Çalışır .................................................................................................. 9
2. AKTARMA KARAKTERİSTİKLERİ ..................................................................................................... 11
2.1 ELLE KUMANDALI DİŞLİ AKTARMA SİSTEMLERİ (MANUEL).................................................... 11
2.1.1 Vites Oranlarının Seçilme Yöntemleri ............................................................................. 12
2.1.2 Taşıt Performans Eğrileri ve Çeki Çeki Çabası.................................................................. 14
2.1.3 İçten Yanmalı Motorların Karakteristik Eğrilerinin Analitik Temsili ................................ 15
2.1.4 Taşıt Güç İhtiyacı ve Çeki Kuvvetinin Hesaplanması........................................................ 17
2.2 OTOMATİK ŞANZIMAN ........................................................................................................... 18
2.2.1 Klasik Otomatik (Konvansiyonel) Şanzıman .................................................................... 19
2.2.2 Tiptronic (sıralı) Şanzımanlar ........................................................................................... 20
2.2.3 Otomatikleştirilmiş Manuel Şanzımanlar ........................................................................ 21
2.2.4 Çift Kavramalı Şanzımanlar .............................................................................................. 21
2.3.1 Sürekli Değişken Transmisyon(CVT) ................................................................................ 22
2.3. HİDROSTATİK TRANSMİSYON ................................................................................................ 28
3. TORK ARTITICI ŞANZIMAN TASARIMI ........................................................................................... 35
3.1 SİSTEM GEREKSİNİMLERİ ........................................................................................................ 35
3.1.1 Dişli Çarklar ...................................................................................................................... 35
3.1.2 Paralel Miller ( Alın dişli çarklar ) ..................................................................................... 36
3.1.3 Kesişen Miller ( Konik Dişli Çarklar ) ................................................................................ 38
3.1.4 Aykırı Miller ..................................................................................................................... 38
3.1.2 Ana Boyutlar .................................................................................................................... 40
3.1.3 Kavrama Olayı.................................................................................................................. 42
3.1.4 Genel Dişli Kanunu .......................................................................................................... 45
3.1.5 Diş Kuvveti ....................................................................................................................... 47
3.1.6 Kontrol Hesabı ................................................................................................................. 51
3.1.7 Boyutlandırma Hesabı ..................................................................................................... 51
3.1.8 Silindirik Helisel Dişli Çarklar ........................................................................................... 69

3
4 HESAPLAMALAR ............................................................................................................................ 78
4.1 VİTES ORANLARININ BELİRLENMESİ ....................................................................................... 78
4.1.1 Efektif Tork Yarıçapının Hesaplanması ............................................................................ 78
4.1.2 Vites Oranlarının Belirlenmesi ......................................................................................... 79
4.1.3 Her Kademede Elde Edilen Çeki Kuvveti Değerleri .......................................................... 79
4.2 DİŞLİ HESABI ........................................................................................................................... 80
4.2.1 Boyutlandırma Hesabı ..................................................................................................... 80
4.2.2 Mukavemet Hesapları ..................................................................................................... 84
4.3 DİŞLİ ÖLÇÜLERİ ....................................................................................................................... 85
5. KAYNAKÇA .................................................................................................................................... 86
6. TEKNİK RESİMLER VE EKLER ......................................................................................................... 87

4
Şekiller Şekil 1 Tork ......................................................................................................................................... 6
Şekil 2 Tork Eğrisi ................................................................................................................................ 7
Şekil 3 Tork Konvertör ........................................................................................................................ 9
Şekil 4 Çeki Çabası-Hız Karakteristik Eğrileri .................................................................................... 12
Şekil 5 Geometrik İlerleme Kuralına Göre Vites Oranlarının Seçimi ................................................ 13
Şekil 6 Benzinli Motorun Performans Karakteristik Eğrileri ............................................................. 14
Şekil 7 Dizel Motorunun Performans Karakteristik Eğrileri .............................................................. 14
Şekil 8 Çeki Çabası-Hız Karakteristik Eğrileri .................................................................................... 17
Şekil 9 Otomatik Şanzıman ............................................................................................................... 18
Şekil 10 Klasik Otomatik (Konvansiyonel) Şanzıman ........................................................................ 19
Şekil 11 Tork Konverter .................................................................................................................... 20
Şekil 12 Tork Konverterin Yeri .......................................................................................................... 20
Şekil 13 Çift Kavramalı Şanzıman...................................................................................................... 21
Şekil 14 Çift Kavramalı Şanzımanın İçi .............................................................................................. 22
Şekil 15 CVT Şanzıman ...................................................................................................................... 23
Şekil 16 CVT Yakıt Tüketimleri .......................................................................................................... 27
Şekil 17 CVT İvmelenme ................................................................................................................... 27
Şekil 18 CVT Elektronik Kontrol Şeması ............................................................................................ 28
Şekil 19 Hidrostatik Transmisyon ..................................................................................................... 29
Şekil 20 Kapalı Devre Hidrolik Sistemin Tesisatının Gösterimi ......................................................... 30
Şekil 21 İki Çeker Sürüş Devresi ........................................................................................................ 30
Şekil 22 Dört Çeker Sürüş Devresi .................................................................................................... 31
Şekil 23 İki Yollu Sürüş Devresi ......................................................................................................... 31
Şekil 25 Kuvvetlerin Gösterimi ......................................................................................................... 31
Şekil 26 Çarklar ................................................................................................................................. 36
Şekil 27 Helisel Dişli Çarklar .............................................................................................................. 37
Şekil 28 Ok Dişli ................................................................................................................................ 37
Şekil 29 Kramiyer Dişli ...................................................................................................................... 38
Şekil 30 Konik Dişliler ....................................................................................................................... 38
Şekil 31 Spiral Dişli ............................................................................................................................ 39
Şekil 32 Sonsuz Vida Mekanizmaları ................................................................................................ 40
Şekil 33 Diş ve Dişli Boyutları ............................................................................................................ 41
Şekil 34 Kavrama Eğrileri .................................................................................................................. 43
Şekil 35 Kavrama Doğrusu ................................................................................................................ 43
Şekil 36 Dişli Kanununun Bulunuşuna Ait Yardımcı Resim ............................................................... 45
Şekil 37 Dişlerde Aşınmanın Durumu ............................................................................................... 47
Şekil 38 Dişlere Etkiyen Kuvvetler .................................................................................................... 48
Şekil 39 Levis Yöntemi ...................................................................................................................... 50
Şekil 40 DIN Standartlarına Göre...................................................................................................... 50
Şekil 41 Düz Dişli Mekanizmalara Göre Helisel Dişli Mekanizmaların Özellikleri ............................. 70
Şekil 42 Helisel Dişlinin Bir Eşdeğer Düz Dişli Çarkı .......................................................................... 71
Şekil 43 Helisel Dişli Yüzey Ölçüleri .................................................................................................. 73
Şekil 44 Helisel Dişliye Uygulanan Kuvvetler .................................................................................... 74
Şekil 45 Helisel Dişlilerde Eksenel Kuvvetler .................................................................................... 76

5
Tablolar Tablo 1 Dişli Ölçüleri ......................................................................................................................... 42
Tablo 2 Yataklama Durumuna Göre Genişlik Çap Oranları .............................................................. 53
Tablo 3 Genişlik Faktörü ................................................................................................................... 53
Tablo 4 Dinamik veya Hız Faktörü (KV ) ............................................................................................ 54
Tablo 5 Yük Dağılım Faktörü (Km ) ................................................................................................... 55
Tablo 6 Güç Kaynağı Ve İş Makinesine Bağlı Olarak Çalışma Faktörü .............................................. 56
Tablo 7 Elektrik Motoru İle Tahrik Edilen İş Makineleri İçin Çalışma Faktörü (K0 ) .......................... 56
Tablo 8 Dişli Çark Malzemesinin Sürekli Mukavemet Sınırı ............................................................. 59
Tablo 9 Büyüklük Faktörü (Kb ) ......................................................................................................... 59
Tablo 10 Ömür Faktörü (KL ) ............................................................................................................. 63
Tablo 11 Güvenirlik Faktörü (KR) ...................................................................................................... 63
Tablo 12 Zorlanma Faktörü (KZ ) ....................................................................................................... 64
Tablo 13 Tablo 13 Dişli Çark Malzemelerinin Mekanik Özellikleri ................................................... 64
Tablo 14 Dişli Çark Malzemelerinin Yüzey Basınç Özellikleri ........................................................... 66
Tablo 15 Alt Kesilme İçin Minimum Diş Sayısı .................................................................................. 72
Tablo 16 Hesaplanan Dişli Ölçüleri ................................................................................................... 85
Figure Figure 1 Form Faktörü(KF) ................................................................................................................ 58
Figure 2 Dişlerin Yorulma Diyagramı ................................................................................................ 59
Figure 3 Yüzey Düzgünlüğü Faktörü (Ky) .......................................................................................... 60
Figure 4 Çentik Faktörü (Kç) .............................................................................................................. 61
Figure 5 Profil Kaydırma Faktörü ...................................................................................................... 61
Figure 6 Dişlerin Çentik Faktörü (Kt) ................................................................................................. 62
Figure 7 Yuvarlanma Noktası Faktörü .............................................................................................. 68

6
1.TORK NEDİR
Tork, motordan tekerleğe iletilen itme(dönme momenti) kuvvetidir. Birimi
Newtonmetre(NM) dir. Halk ağzıyla otomobilin çekişi olarak da tarif edebileceğimiz tork,
kamyon, otobüs, traktör gibi araçlarda çok yüksek değerler almaktadır. Bunun nedeni yük
taşıyan araçlarda hız yapmaktan çok çekişe ihtiyaç duyulmasıdır. Biz de projemizde içten
yanmalı motora sahip bir aracın 2 kademede torkunu arttırabilecek bir şanzıman tasarımı
yapacağız.
Aslında bu kavram fizikte dönme momenti
olarak bilinen kuvvet x kuvvet kolu
formülünden başka bir şey değildir.
Yandaki resimde anahtarla somunun
sıkılması gösterilmekte. Burada elle
uygulanan kuvvet vida ile somun arasında
vidaya paralel yönde bir gerilim ve dairesel
yönde moment oluşturmakta. İşte bu
momente tork denir. Anahtarın sapı ne
kadar uzun olur ve ne kadar geriden
tutulabilirse, somun o kadar kolay
dönecektir. Otomobilin tekerleklerinde olan
da bunu aynısıdır. Tekerleğin çapı
küçültülürse tork yükselir ve daha ani
tepki veren daha esnek bir sürüş karakteristiğine sahip olunabilir. Tabi bu durumda
maksimum sürat düşecektir. Bir yerden kazanılırken bir yerden fire vermek gerekir, bu işin
doğasında olan birşeydir.
Torku ifade eden bir diğer oto terimi de esnekliktir. Aynı devir bandında torku yüksek olan
otomobiller ara hızlanmalarda yani sollamalarda örneğin 60km/h hızdan 120km/h hıza
ulaşmada daha başarılıdır. Bu da otomobilin esnekliği olarak tanımlanır. Torku yüksek
olan bir otomobil özellikle rampa çıkarken fazla devir çevirmeye ihtiyaç duymadan hızını
koruyabilir fakat torku az olan otomobil ivmesini koruyabilmek için vites düşürerek hızını
artırmak zorundadır.
Torkun yüksek olması için temel olarak motorun yanma odasında normalden daha kuvvetli
bir yanma gerçekleşmesi gerekir. Aynı beygir gücüne sahip bir benzinli motor ile bir dizel
motor arasında iki kat tork farkı oluşabilir. Dizel motorlarda yanma odasındaki sıkıştırılan
yüksek basınçlı havanın içerisine yine yüksek basınçlı enjektörlerden yakıt püskürtülerek
kuvvetli bir yanma elde edilir. Bunun yanında pistonun kurs içerisindeki hareket
mesafesinin artması ve buna bağlı olarak piston kolunun uzaması gibi etmenlerden ötürü
dizel motorların torkları yüksektir. Fakat dizel motorlar benzinlilere göre fazla devir
yapamadıklarından hızlanma değerlerinde pek iç açıcı değerler elde edemezler yani sahip
oldukları tork avantajlarını devir düşüklükleri nedeniyle kısmen kaybederler. Bu devir
düşüklüğünün nedeni ise, yanma odasına püskürtülen mazotun odacığın belirli bir
noktasından başlayarak yayılarak patlamayı oluşturmasıdır. Bu noktada patlamayı
kuvvetlendirmek için enjektör basıncını artırarak yakıtı yanma odasına daha hızlı
göndermekten başka yapacak fazla bir şey yoktur. Benzinli motorlarda ise, birden fazla
buji ile farklı noktalarda ateşleme sağlanabilmesinin yanında moleküller arası yanmayı
hızlandırıcı partiküllerin yakıta eklenmesiyle yanma verimini artırmak mümkün
olmaktadır.
Şekil 1 Tork

7
Yüksek devirli benzin motorları her halükarda en gelişmiş turbo dizel bir motordan dahi
ivmelenme anlamında üstündürler. Fakat alt devirlerdeki ani hızlanma yetenekleri
sayesinde günlük şehir içi kullanımda dizel motorlar çok keyifli sürüş dinamikleri sunarlar.
Bunun nedeni elbette yüksek tork değerleridir. Torku yüksek olan bir aracın gaz pedalına
basıldığında insanın sırtını koltuğa yapıştıracak bir hızlanma duygusu yaşatır ve bu da
sürüşteki en önemli keyif faktörlerinden birisidir. Fakat hareketin devamında devirler
arttıkça bu hissiyatı yaşamak pek mümkün değildir. Benzinli otomobiller ise daha doygun
hızlanırlar. Bu nedenledir ki, drag yarışlarında dizel otomobiller genellikle tercih
edilmemektedir.
Bir otomobilin vites kutusunda, daha fazla tork üretmesi veya daha fazla hız yapması
arasında tercih yapılabilir. Bu konuda güç ve tork değerleri binek otomobillerde birbirine
yakın değerlerde tutulurken örneğin bir jipte tork yönüne kaydırılmıştır. Misal bir binek
otomobil 130 HP güç, 160 Nm tork değerine sahipken aynı motorun kullanıldığı bir jip 100
HP güç, 280 Nm tork değerine sahip olabilir. Burada beygir gücü değişmezken kullanılan
şanzıman oranlarına bağlı olarak torkta farklılık görülmektedir. Benzer şekilde tekerlek
çapı büyük olan traktör gibi araçlarda torkun yüksek olması gerekir çünkü tekerlek çapı
büyüdükçe motorun çekişi düşer. İlave olarak motor tipi de tork açısından önemlidir. Sıra
tipli motorlar güç üretmeye odaklı olarak üretilirken V tipli motorlar çekişin fazla ve
sürekli olması istenen yerlerde yaygın olarak kullanılır.
Tork Eğrisi
Otomobilden anlayanların baktığı en önemli ve en iyi yorumlanması gereken teknik veri tork
eğrisidir. Aşağıda Volkswagen markasına ait 1.4 TSI ve 1.6 FSI motorlarının tork eğrileri
karşılaştırılmalı olarak verilmiştir.
Şekil 2 Tork Eğrisi

8
Grafiği yorumlarken ilk başta şu temel bilgiyi bilmek gerekir: “Bir motorun tork eğrisi ne
kadar düz bir çizgi şeklinde ilerliyorsa, motor o kadar verimlidir.” Motorun verimli olması
kullanılan yakıttan minimum ısıl kayıpla optimum kazanç elde edilebildiği anlamına gelir
ki, bu bir motor için en belirleyici kalite faktörlerinin başında gelir.
Grafikteki her iki motor da benzinlidir. 1.4 litrelik TSI motor 1500 devir seviyelerinden
başlayarak 3500 devre kadar aynı tork değerini koruyabilmiştir. Bu demektir ki otomobil
bu devir bandında kendinden beklenebilecek en atak(esnek) sürüşü mümkün kılıyor. 1.6
litrelik FSI motor ise, maksimum torkunu 4000 devirde üretmiş ve bu devirden sonra 6300
devirlere kadar fazla bir şey kaybetmeden çekişini korumuş. Atmosferik bir motor için
güzel bir değer fakat 4000 devire kadar otomobilin uyuşuk bir tavır sergilemesi hem şehir
içi yakıt ekonomisi hem de sürüş keyfi açısından kötü bir durum. Bu motordan performans
alınabilmesi için yüksek devirde kullanmak şart, bu da çok yüksek ısıl kayıplarla beraber
verimsizliği ve yüksek yakıt tüketimini beraberinde getirir. Peki, bu durumda 1.4 TSI
motor harika mı? Tabiki değil; onun da 3500 devirden sonra aniden nefesi kesilmeye
başlıyor ve FSI motor kadar yüksek devirle motoru çeviremiyor. Sonuç olarak rampada
TSI motor FSI’ya rahatlıkla toz yutturacak ve kıyas götürmez şekilde performansını
gösterecektir. Düz yolda ise FSI motor, TSI’yı hem hızlanma değeri olarak hem de
maksimum sürat anlamında ya geride bırakacaktır. Ama yakıt ekonomisi ve sürüş keyfi
açısından TSI motorun tercih edilebilirliği daha fazla. FSI motorun eğrisi grafiğin hiçbir
yerinde düz bir çizgi olarak ilerlemediğinden zaten ilk bakışta çok başarılı olmadığı
anlaşılıyor. Bu grafikte kırmızı çizgiyle gösterilen TSI motor tork anlamında da güçlü
zaten ama bazı grafiklerde tam tersi olur ve eğri tepe gibi olan mavi grafik kırmızının
üzerine çıkar. İşte o durumda da düz ilerleyen grafiğe sahip aracı tercih etmek daha
mantıklı olacaktır. Maksimum torku az olsa da o torku değişken devir aralığında sürekli
üretebilen motor daha başarılıdır.
1.1 Tork Konvertör Nedir Manuel yani düz vites kullanan otomobillerde vites değiştirirken debriyaj kavraması ile
motorun boşa alınması gerekir. Otomatik vitesli araçlarda ise, motor ile bağlantıyı kesecek
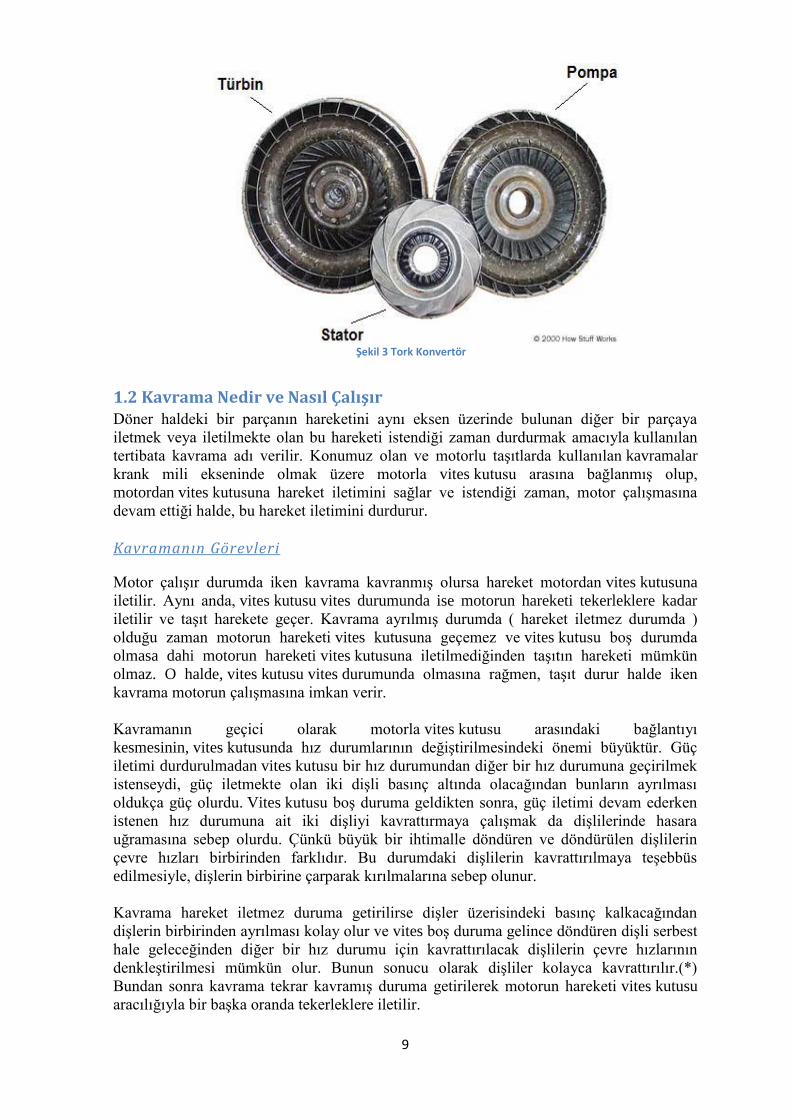
bir debriyaj kavraması bulunmadığından tork konverteri kullanılır. Türbin, stator, pompa
ve şanzıman sıvısı(transmission fluid) kısımlarından oluşan tork konverteri, iki vantilatör
pervanesine benzer dairesel kapaklar ve onların ortasında stator denilen küçük bir pervane
ile konumlandırılmıştır. Dairesel kapaklar içerisine doldurulmuş şanzıman sıvısı hareket
halinde iken şanzıman dişlilerine bağlı olan türbine çarpar. Bu sayede güç şanzıman
dişlilerine tork olarak iletilmiş olur. Araç kırmızı ışıkta durduğunda tork konverteri torkun
bir miktarını şanzımana iletir ve frene dokunmadan tam olarak duramazsınız.
Bu aracın stop etmemesi içi zorunludur. Bu nedenle “D” yani viteste olan araç, duruyorken
gazdan ayak çekildiğinde yavaşça ilerlemeye başlar. Bunu sağlayan tork konverterinin
gücün bir kısmını iletiyor olmasıdır. Eğer vites “N” konumuna yani boşa alınırsa, pompa
ve türbin tamamen boşta döner ve şanzımana hiç güç iletilmez. Motor çalıştığı sürece tork
konverteri dönme hareketini her durumda sürdürür. Otomatik vitesli araçların sıklıkla dur-
kalk yapılan kullanımlarda daha fazla yakıt harcamasının nedeni budur.
Tork Konverterinin Kısımları:
Türbin
Pompa
Stator
Şanzıman Sıvısı
9
1.2 Kavrama Nedir ve Nasıl Çalışır Döner haldeki bir parçanın hareketini aynı eksen üzerinde bulunan diğer bir parçaya
iletmek veya iletilmekte olan bu hareketi istendiği zaman durdurmak amacıyla kullanılan
tertibata kavrama adı verilir. Konumuz olan ve motorlu taşıtlarda kullanılan kavramalar
krank mili ekseninde olmak üzere motorla vites kutusu arasına bağlanmış olup,
motordan vites kutusuna hareket iletimini sağlar ve istendiği zaman, motor çalışmasına
devam ettiği halde, bu hareket iletimini durdurur.
Kavramanın Görevleri
Motor çalışır durumda iken kavrama kavranmış olursa hareket motordan vites kutusuna
iletilir. Aynı anda, vites kutusu vites durumunda ise motorun hareketi tekerleklere kadar
iletilir ve taşıt harekete geçer. Kavrama ayrılmış durumda ( hareket iletmez durumda )
olduğu zaman motorun hareketi vites kutusuna geçemez ve vites kutusu boş durumda
olmasa dahi motorun hareketi vites kutusuna iletilmediğinden taşıtın hareketi mümkün
olmaz. O halde, vites kutusu vites durumunda olmasına rağmen, taşıt durur halde iken
kavrama motorun çalışmasına imkan verir.
Kavramanın geçici olarak motorla vites kutusu arasındaki bağlantıyı
kesmesinin, vites kutusunda hız durumlarının değiştirilmesindeki önemi büyüktür. Güç
iletimi durdurulmadan vites kutusu bir hız durumundan diğer bir hız durumuna geçirilmek
istenseydi, güç iletmekte olan iki dişli basınç altında olacağından bunların ayrılması
oldukça güç olurdu. Vites kutusu boş duruma geldikten sonra, güç iletimi devam ederken
istenen hız durumuna ait iki dişliyi kavrattırmaya çalışmak da dişlilerinde hasara
uğramasına sebep olurdu. Çünkü büyük bir ihtimalle döndüren ve döndürülen dişlilerin
çevre hızları birbirinden farklıdır. Bu durumdaki dişlilerin kavrattırılmaya teşebbüs
edilmesiyle, dişlerin birbirine çarparak kırılmalarına sebep olunur.
Kavrama hareket iletmez duruma getirilirse dişler üzerisindeki basınç kalkacağından
dişlerin birbirinden ayrılması kolay olur ve vites boş duruma gelince döndüren dişli serbest
hale geleceğinden diğer bir hız durumu için kavrattırılacak dişlilerin çevre hızlarının
denkleştirilmesi mümkün olur. Bunun sonucu olarak dişliler kolayca kavrattırılır.(*)
Bundan sonra kavrama tekrar kavramış duruma getirilerek motorun hareketi vites kutusu
aracılığıyla bir başka oranda tekerleklere iletilir.
Şekil 3 Tork Konvertör

10
Diğer taraftan bir taşıtın durur halden belirli bir hızdaki hareket haline hemen geçişi
imkansızdır veya büyük bir sarsıntıya sebep olunur. Bunun gibi düşük bir hızdan daha
yüksek bir hıza veya yüksek bir hızdan daha düşük bir hıza aniden geçişte de büyük bir
sarsıntı meydana gelir ve hareketi ileten parçalar aşırı derecede zorlanarak hasara uğrarlar.
Kavrama ilk hareket esnasında motorun hareketini vites kutusuna, dolayısıyla tekerleklere,
tedrici olarak iletir ve taşıtın harekete geçişi sarsıntısız olur. Aynı şekilde vites durumunun
her değiştirilmesinden sonra motorla vites kutusunu tedricen bağlanmasını sağlayarak,
taşıtın ani hızlanmasını veya ani yavaşlamasını, dolayısıyla sarsıntıları önleyerek hareket
ileten parçaları hasara uğratmaktan korumuş olur ve taşıtta bulunanları oldukça rahatsız
edici bir durum ortadan kaldırılır. Bunlardan başka herhangi bir sebeple de olsa
motorla vites kutusu arasındaki bağlantının kesilmesi gerekebilir. Örneğin; bir arıza
nedeniyle vites kutusu boş duruma getirilemeyebilir. Bu durumda taşıtın tamir yerine kadar
çekilmesi sırasında tekerleklerin hareketinin motora iletilmemesi kavramanın ayırmasıyla
mümkün olur.
Bu açıklamalardan sonra kavramanın görevi şu şekilde özetlenebilir:
İlk hareket sırasında motorun hareketini tekerleklere tedricen ileterek taşıtın
sarsıntısız olarak harekete geçişini sağlamak.
Taşıt hareket halinde iken vites durumlarını değiştirmek için
motordan vites kutusuna hareket iletimini geçici olarak kesmek.
Gerekli hallerde motorla güç aktarma organlarının bağlantısını kesmek.
Kavramada Aranan Özellikler
Yukarda açıklandığı gibi, kavramanın esas görevi motorun
hareketini vites kutusuna tedrici olarak iletmektir. Fakat modern bir kavramada bu
görevin yanında aşağıdaki özelliklerin bulunması istenir.
Vites durumlarının kolay ve sessiz olarak değiştirilebilmesi için kavrama diskinin
atalet momenti küçük olmalıdır. Bunun içinde diskin hafif olması gerekir. Çok
büyük disklerde kavrama pedalına basılınca disk de özel şekilde
frenlenerek vitese geçme işlemi sessiz hale getirilir.
Krank milindeki burulma titreşimlerini vites kutusuna iletmemelidir.
Serbest duruma geçmesi için kavrama pedalına tatbik edilmesi gereken kuvvet az
olmalıdır.
Bakımı kolay olmalıdır.
Ucuza mal olmalıdır.

11
2. AKTARMA KARAKTERİSTİKLERİ İçten yanmalı motorların Güç-Tork-Hız karakteristikleri taşıtların doğrudan tahrikine
uygun değildir. Bu yüzden, farklı yükleme şartlarında tatminkar bir çeki çabası sağlamak
için aracın bir aktarma sistemine sahip olması gerekmektedir. Aktarma sisteminin
gerekliliği Şekil 4 deki çeki çabasının hız ile değişimi grafiği incelendiğinde
anlaşılabilmektedir.
“Aktarma” terimi motorun ürettiği gücü tekerlere iletmede kullanılan bütün alt ve üst
sistemleri kapsamaktadır ve yol taşıtları için başlıca üç tip mevcuttur.
1. Elle kumandalı dişli aktarma sistemleri (dişli kutuları)
2. Hidrodinamik transmisyonlar (tork konverter+otomatik şanzuman)
3. Hidrostatik transmisyonlar (hidrolik pompa+hidrolik motor)
Bunlara ek olarak son zamanlarda “Sürekli Değişken Aktarma” adı verilen ve CVT olarak
bilinen aktarma sistemleri de kullanılmaktadırlar.
2.1 ELLE KUMANDALI DİŞLİ AKTARMA SİSTEMLERİ (MANUEL) Aktarma sistemleri için temel şartlar şunlardır:
1. Topyekün “dişlilendirme” ile vmaksimum, eldeki mevcut güçten üretilebilmelidir.
2. Taşıt yüklü haldeyken, tipik olarak %33 gibi bir eğimde kalkış yapabilmelidir.
Elle kumandalı (manuel) aktarma sistemleri genellikle;
Debriyaj (kavrama)
Vites kutusu (şanzıman)
Şaft
Tahrik dingili (dingil + defransiyel + son dişli) gibi parçalardan oluşmaktadır.
Bunlara ek olarak vites kutusu ve defransiyel parçaları genellikle “son dişli” (maruti) adı
verilen bir birime entegre edilmektedir. Genel kural olarak son dişli adı verilen birimin
kendine has sabit bir vites oranı bulunmaktadır.

12
Şekil 4 Çeki Çabası-Hız Karakteristik Eğrileri
2.1.1 Vites Oranlarının Seçilme Yöntemleri
En düşük vites oranı, genellikle yolcu taşıtları için, ilk harekete geçiş sağlanırken aracın
%33’lük bir eğimi tırmanabilmesini sağlayacak şekilde seçilmelidir. Buna ek olarak en
düşük vitesin oranının seçiminde dikkat edilmesi gereken bir diğer husus da aracın tipik bir
yol yüzeyinde maksimum eğimi tekerleklerde kaymaya neden olmayacak bir ilk vites
oranının seçilmesidir. Böylece, en düşük vitesin oranın aşağıdaki yönteme göre
hesaplanmalıdır.
Burada Memax maksimum motor torku, W taşıt ağırlığı, fr yuvarlanma direnç katsayısı, ξax
son dişli oranı, r tork altındaki tekerin efektif yarıçapı olup, t ise aktarma verimidir.

13
Ara vites oranları, it2, it3 gibi, taşıtın düzgün ivmelendirilmesi için gereklidir. Herhangi
ardışık iki vites için basamak oranı yüksek ise,
Vites büyütüldüğünde ne fazlaca azalır.
Vites küçültültüğünde ne fazlaca artar.
En yüksek ve en düşük vites oranlarının ve ardışık viteslerin oranlarının (basamak oranı)
belirlenmesi diğer bir yandan aracın tipine de bağlıdır. Örneğin, iş makinası olarak ya da
yük taşımak için kullanılmakta olan ağır vasıtaların vites oranları genellikle “geometrik
ilerleme” yöntemi yardımıyla seçilmektedir. Bu yöntemin temel özelliği motorun çalışma
hızının her viteste aynı hız menzilinde tutmaya çalışmasıdır. Yani vites değişimlerinde
motor devrinin fazlaca artmasını veya azalmasını da engellemek ve ayrıca dişlilerin
çalışma esnasında, aynı diş takımlarının birbirleriyle temas ederek aşınmasını önlemek
“geometrik ilerleme” metoduyla tayin edilmiş vites oranları ile mümkün olabilmektedir.
Basamak oranı genellikle yaklaşık 1,8 gibi tipik bir değere sahip olmalıdır ki yukarıda
sıralanmış şartlar sağlanabilsin.
Örneğin dört –hızlı bir vites kutusunun basamak oranı (geometrik ilerleme yöntemine
göre) şu şekilde olmaktadır.
Şekil 5 Geometrik İlerleme Kuralına Göre Vites Oranlarının Seçimi

14
2.1.2 Taşıt Performans Eğrileri ve Çeki Çeki Çabası
Şekil 6 Benzinli Motorun Performans Karakteristik Eğrileri
Şekil 7 Dizel Motorunun Performans Karakteristik Eğrileri

15
2.1.3 İçten Yanmalı Motorların Karakteristik Eğrilerinin Analitik Temsili
Kısa spesifikasyonlar:
(n1, Pe1) = (n1, Pemax)
(n2, Te2) = (n2, Temax)
Güç veya tork eğrisi tablo ya da grafik olarak biliniyorsa, bu verilere göre eğri
(polinom) uydurulabilir.
Sadece kısa spesifikasyonlar biliniyorsa, 3.dereceden bir yaklaşık eğri
uydurulabilir. (curve fitting)
Pe: Herhangi bir motor devrindeki motor gücü
Bu fonksiyonu, katsayıları ile birlikte yazmak gerekirse:
2 3
e e e ep p p
1 1 1 1
P n n n= A +B +C
P n n n
A, B ve C katsayılarının belirlenmesi için üç şart gereklidir. Bunlar:
i) n1, P1
ii) n2, T2
iii) Tork zirvesinin doğruluğu (Doğru tork zirvesi)
a-Doğru Tork Zirvesi Formülasyonu
Tork zirvesinin doğruluğu, yaklaşık tork eğrisinde maksimum tork değerinin ne=n2’de
olması durumuna karşılıktır.
P = T. T = P / Te =
2
e e e1e T T p
e 1 1 1
KP n nKPT = = A +B +C
n n n n
Yaklaşık tork eğrisinin maksimum değerinin n2’de olması için:
n =ne 2
e
e
dT=0
dn olmalıdır.
ee 1
1
P=fonk.(n /n )
P

16
e 2
e e1
2
e 1 1 1 n =n
dT 2CnK.P B= +
dn n n n
=1 2
2
1 1
K.P2 0
n
nB C
n
2 0B C
Bu denklemler beraber çözülürse:
2 2
1
2
12
(1 )T
P
PA
,
1
11
2
TT
AB
TT
BC =-
2Ω
Olarak hesaplanır.
b-Doğru Tork Zirvesi Formülü
Herhangi bir motor devrindeki güç ve tork değerleri, katsayıları yukarıda hesaplanan,
aşağıdaki formülasyona göre hesaplanabilir
2 3
e e e eT T T
1 1 1 1
P n n n= A +B +C
P n n n
2
e e e1e T T T
e 1 1 1
KP n nKPT = = A +B +C
n n n n

17
2.1.4 Taşıt Güç İhtiyacı ve Çeki Kuvvetinin Hesaplanması
Şekil 8 Çeki Çabası-Hız Karakteristik Eğrileri
Taşıt eğim tırmanırken ya da harekete geçme anında gerekli olabilecek, maksimum çeki
kuvveti, maksimum torkun elde edildiği motor devrinin karşılığı olan motor gücünde
üretilebilir. Her viteste elde edilebilen çeki kuvveti aşağıdaki formülasyon ile
hesaplanabilir.
2
e-max t trw-max dT T@nmax w w
(T .i .i ).ηTF =F = =
r r
Burada, wr torka maruz kalan tekerin efektif yarıçapı, it vites oranı, trη aktarma verimi olup
id ise son dişli oranını temsil etmektedir.
Çeki Çabası-Hız Karakteristik Eğrileri (Şekil 8) incelendiğinde, içten yanmalı
motorların, doğrudan tahrik tekerlerine bağlanamayacağının neden mümkün
olamadığı açıkça görülebilmektedir. Şanzıman kullanımı olmadan üretilen çeki
kuvveti, taşıtın ilk hareketine yeterli olamamakta; motor ve tekerlekler arasında
bir “tork yükseltici”ye ihtiyaç duyulmaktadır.

18
2.2 OTOMATİK ŞANZIMAN Gaz pedalına basma hızına bağlı olarak yağ basıncı ile vites değiştirilmesini sağlayan
transmisyon sistemleridir. Günümüzde her tür araçlara uygulanabilir. Otomatik
transmisyonlu araçlarda vites durumu sınırsızdır. Önden çekişli araçlarda kullanılan
otomatik transmisyonlara transaks da denilmektedir. Transakslar, arkadan itişli araçlarda
kullanılan otomatik transmisyonlara göre daha da küçük yapıdadırlar.
Otomatik transmisyonlar içerisinde basıncı sağlayan yağ olarak ATF yağı kullanılır Üç
kısımdan meydana gelir:
1. Tork konvertörü
2. Vites dişlileri
3. Hidrolik kumanda
Otomatik şanzımanın üstünlüklerini şu şekilde sıralayabiliriz;
Motor ile güç aktarma organları arasındaki bağlantı hidroliktir. Bu nedenle
motordan transmisyona hareket iletiminde titreşim olmaz. Bu durum transmisyonun
ömrünü uzatır.
Otomatik transmisyonlu araçların, kavrama tertibatının hidrolik olması nedeniyle
debriyaj pedalı yoktur. Hidrolik kavrama, aracın ilk harekete geçişinin sarsıntısız
olmasını sağlar.
Otomatik transmisyonlu araçlarda vites değiştirme işlemlerini sürücü
gerçekleştirmez. Böylece dikkati sadece yola verir.
Otomatik transmisyonlu araçları, ehliyet alabilecek durumda olan özürlü kişiler,
araç üzerinde herhangi bir sistem değişikliğine gerek kalmadan rahatlıkla
kullanabilirler.
Otomatik transmisyonlu araçların motorları, araç viteste iken frene basılması
durumunda da çalışmaya devam eder.
Otomatik transmisyonlu araçlar, uzun yol şartlarında standart vites kutulu araçlara
göre daha az yakıt yakarlar.
Otomatik transmisyonlu araçlar rampada kalkış esnasında geriye kaymaz.
Otomatik şanzımanın dezavantajlarını şu şekilde sıralayabiliriz;
Otomatik transmisyonlu araçlar standart vites kutulu araçlara göre daha pahalıdır.
Otomatik transmisyonlu araçların onarımı ve yedek parçaları pahalıdır.
Şekil 9 Otomatik Şanzıman

19
Otomatik transmisyonun çalışması ile ilgili arızaların kaynağı motor kontrol sistemi veya
otomatik transmisyonun kendisi de olabilir. Arıza arama çok basit işlemler ile başlar. İlk
olarak arızanın nereden kaynaklandığı belirlenir. Elektrik sistemi ile ilgili arızalar
elektronik kontrol ünitesi tarafından kendi kendini test fonksiyonu ile tespit edilir ve
gösterge panelindeki kırmızı uyarı lambasının yanıp sönmesiyle öğrenilebilir. Otomatik
transmisyonun mekanik problemi durumunda yapılması gereken iki test vardır.
Bayılma testi: Bu test motor ve transmisyonun genel (planet dişli grubunun fren ve
kavramaların) performansını kontrol etmek için yapılır. Bunu yaparken araç hareket
edemez durumda iken transmisyon “D” ve “R” konumuna alınıp gaza tam basılarak motor
devri ölçülür. Bu sonuç, arıza kartında incelenerek gereği yapılır.
Gecikme zaman testi: Bu test vites kolu N den, D veya R konumuna alındığında şok
hissedilinceye kadar geçen zamanı ölçer. Bu ölçüm kavrama veya fren malzemesinin
aşıntısını hidrolik devrenin çalışmasını kontrol içindir.
2.2.1 Klasik Otomatik (Konvansiyonel) Şanzıman
Şekil 10 Klasik Otomatik (Konvansiyonel) Şanzıman
Bu şanzımanlar, tarihten bu yana pek değişmemiştir. En çok kullanılan sistemdir.
Kavrama ve güç aktarma görevini Tork konvertörü üstlenir. Motordan gelen tork
güç konvertörüne, oradan da şanzımana iletilir.
20
Şekil 11 Tork Konverter
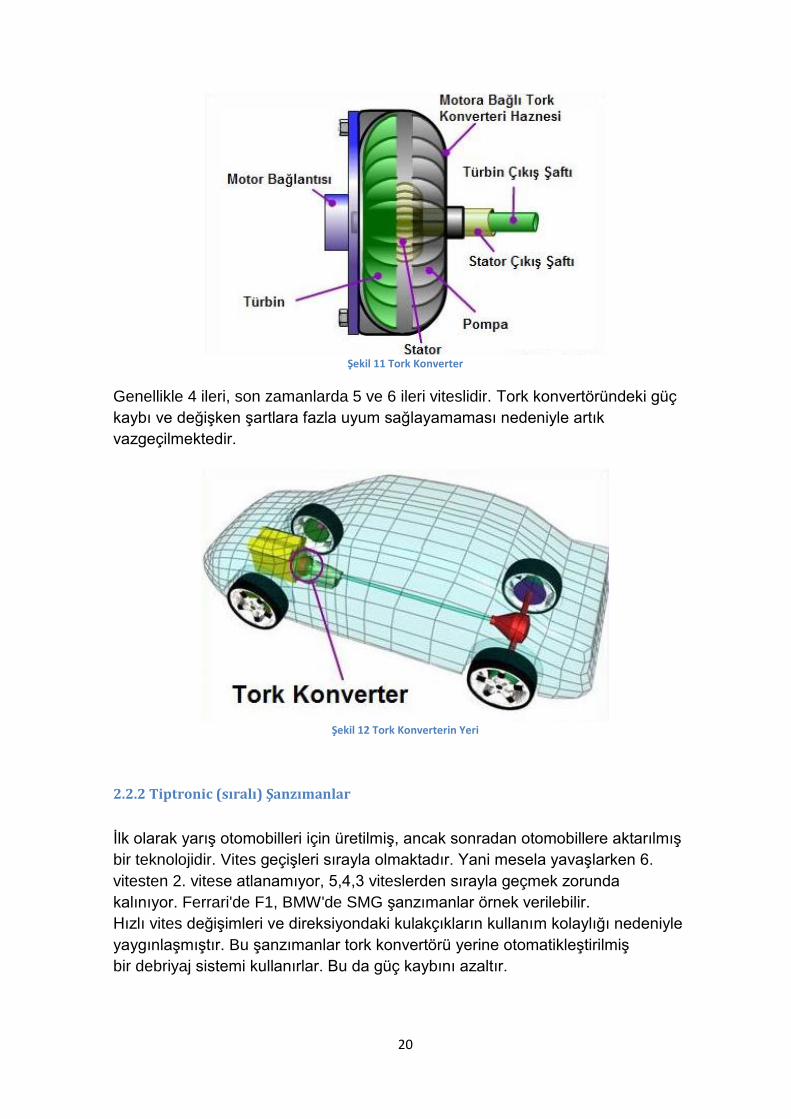
Genellikle 4 ileri, son zamanlarda 5 ve 6 ileri viteslidir. Tork konvertöründeki güç
kaybı ve değişken şartlara fazla uyum sağlayamaması nedeniyle artık
vazgeçilmektedir.
Şekil 12 Tork Konverterin Yeri
2.2.2 Tiptronic (sıralı) Şanzımanlar
İlk olarak yarış otomobilleri için üretilmiş, ancak sonradan otomobillere aktarılmış
bir teknolojidir. Vites geçişleri sırayla olmaktadır. Yani mesela yavaşlarken 6.
vitesten 2. vitese atlanamıyor, 5,4,3 viteslerden sırayla geçmek zorunda
kalınıyor. Ferrari'de F1, BMW'de SMG şanzımanlar örnek verilebilir.
Hızlı vites değişimleri ve direksiyondaki kulakçıkların kullanım kolaylığı nedeniyle
yaygınlaşmıştır. Bu şanzımanlar tork konvertörü yerine otomatikleştirilmiş
bir debriyaj sistemi kullanırlar. Bu da güç kaybını azaltır.

21
2.2.3 Otomatikleştirilmiş Manuel Şanzımanlar
AMT, Easytronic, Dualogic, MCP, I-Shift gibi şanzımanlardır. Bu tip şanzımanların
manuel şanzımanlarla farkı, 3 adet elektrik motoru içermesidir. Bu motorlardan
birincisi debriyajı, ikincisi vites seçimini, üçüncüsü vitesin geçmesini sağlar. Ancak
bu şanzımanlar vitesdeğişimi sırasında doğru vitesi hızlıca seçemedikleri için ağır
ve sarsıntılı çalışırlar. Son yıllarda optimize edilse de Opel, Astra modelinde
bu şanzımanlardan vazgeçmiştir. Bu şanzımanın olumlu özelliği
ise, debriyajı doğru kullandığından ve gereksiz kullanmadığından yakıt tüketimini
düşürmesi ve debriyajın ömrünü uzatmasıdır.
2.2.4 Çift Kavramalı Şanzımanlar
Audi S-Tronic, VW DSG, Volvo Powershift şanzımanlar örnek verilebilir. Esasen
otomatikleştirilmiş manuel olan bu tip şanzımanlarda iki adet debriyaj sistemi
bulunur. Birincidebriyaj 1,3,5 ve 7. vitesleri iletirken,
ikinci debriyaj 2,4,6. vitesleri iletir. Böylece bir sonrakivites değişmek için hazır
durumdadır.
Şekil 13 Çift Kavramalı Şanzıman
Kısa sürede ve sarsıntısız gerçekleşen vites değişimleri, güç kaybı yaşatmaması
ve en doğru vitesleri seçmesi ile en başarılı sistemdir. VW'nin binek modellerindeki
şanzımanın geliştirilmiş versiyonunun Bugatti Veyron'da kullanılması bu sistemin
seviyesinin göstergesidir. Ancak sistemin maliyeti oldukça yüksektir.

22
Şekil 14 Çift Kavramalı Şanzımanın İçi
2.3.1 Sürekli Değişken Transmisyon(CVT)
CVT (Constantly Variable Transmission), Türkçe’ye “sürekli değişken iletim” yada sürekli
değişken hareket iletimi” olarak çevrilmektedir. Bazı yabancı kaynaklarda bu şanzıman
sistemine “Twist and Go” (Çevir ve Git) denilmektedir. Elektronik olanı ise ECVT
şeklinde kısaltılmıştır.
Bildiğimiz gibi scooterlar kısaca CVT denilen şanzıman sistemine sahiptir. Maksi
scooterlar diğer motosikletlere göre ebatları daha büyük olmasına ve birçok avantaja sahip
olmalarına rağmen bazı motosiklet kullanıcıları tarafından sırf CVT şanzımana sahip
oldukları için küçümsenirler. Biz Motosiklet kullanıcıları olarak CVT şanzımana burun
bükerken otomobil üreticileri çoktan CVT şanzımanın avantajlarının farkına vardı ve yeni
modellerini CVT şanzımanlı olarak üretmeye başladı bile. Çünkü CVT şanzımanın hem 5
ileri düz vitesli hem de 4 ileri otomatik vitesli şanzıman sistemlerine göre birçok avantajı
bulunmaktadır. Gürültüsüz olması, az yakıt sarfiyatı ve sarsıntısız vites değişimi bunlardan
bazılarıdır. . CVT teknolojisinin sunduğu avantajlar tanındıkça VDT, Ford, Nissan, Volvo,
Honda, Subaru, Fiat, Fuji Heavy Ind. Ltd., Audi, BMW gibi firmaların bu konuyla ilgili
yatırımları da artmıştır.
Audi A6, Nissan Murano SUV, Nissan Micra, Honda Civic, Honda City, Toyota Prius,
Fiat Albea, Subaru G3X, Subaru HM-01, Avrupa Ford Fiesta 1.3 lt. ve Ford Escort 1.6 lt.
gibi araçlar CVT şanzımanlı otomobillere örnek olarak gösterilebilir.
CVT’ nin eksiksiz bir başarısı, küçük bir otomobil olan Nissan Micra’ dır. Dünya
genelinde, Micra’ ların yaklaşık % 30’ u CVT ile sipariş edilmektedir. Ayrıca Micra’ da
sağlanan başarıdan sonra Nissan hem büyük hem de küçük otomobiller için CVT’ yi
geliştirmektedir.

23
Muhtemelen bu kademesiz transmisyonların yeni yeni uygulanmasına ait en etkileyici
örnek, Renault V10 motoru ile 800 HP gücündeki CVT tahrikli Canon-Williams Formula 1
yarış arabasıdır. Williams’ ın teknik müdürü Patrick Head’ in söylediğine göre “ eğer
Formula 1 yarışlarında CVT, çekiş gücü kontrolü, Aktif süspansiyon vb. gibi sürücüye
yardımcı elemanlar 1993 yılının ortalarındaki kural değişiklikleri olmayıp
yasaklanmasaydı, bu otomobil bugün gireceği bütün yarışları büyük bir ihtimalle
kazanabilirdi.”
Porsche yarış bölümü müdürü olan Max Welty, “CVT’ nin birbirinden farklı bir çok durum
altında optimal kontrole izin verdiğini, bunun spor arabalar için özellikle önemli olduğunu,
konfor ve sportifliğin ideal kombinasyonu için Porsche’ nin CVT tip kontrol stratejisini
geliştirdiğini” söylüyor.
Otomobil devleri, hem benzinli hem de elektrikli motora sahip olan hybrid
(melez) modeller üretmek için kıyasıya bir yarışa başladı. Japonya'dan sonra ABD ve AB
ülkelerinde hybrid otomobillere talep 5 yılda 15 kat arttı. Pazarın 200 milyar doları bulması
bekleniyor. Üstelik hybrid otomobillerde CVT veya ECVT şanzımana sahiptir.
Peki, CVT Nedir?
Motorlu bir taşıtta, taşıtın motorundan tahrik aksına kadar gücü nakleden aktarma
organları; hız dönüştürücü (kavrama-debriyaj), moment dönüştürücü (vites kutusu) ve
moment dağıtıcıdan (diferansiyel) meydana gelir.
Şekil 15 CVT Şanzıman

24
CVT şanzımanda ise klasik vites kutusu ve debriyaj bulunmaz.
Sürekli değişken hareket iletimi yani CVT (Continuously Variable Transmission) fikrinin
ortaya atılması hemen hemen ilk otomobilin icadı ile başlar. 1886’da Alman otomotiv
öncülerinden Daimler ve Benz ilk benzin yakıtlı otomobillerinde V-kayışlı CVT
kullanmışlardır. Bunun için, otomatik vites değiştirme üniteleri ile özellikle hareketli
makara sistemi kullanılarak otomobillere takılması konusunda birçok girişimlerde
bulunulmuştur.
Değişken Oranlı Şanzıman - 1950'li yıllarda Hollandalı Van Doorne tarafından geliştirilen
sistem, metal bir kayışın, iç yüzeyleri konik bir çift kasnak arasında çalışma prensibine
dayanıyor. Aslında scooterlardaki aktarma sistemiyle aynı prensibe sahip CVT'de herhangi
bir dişli olmadığı için sürekli değişken oranlı şanzıman olarak adlandırılıyor. CVT
şanzımanlarda sadece bir başlangıç ve bitiş oranı bulunuyor. Motor devri ve hıza bağlı
olarak aktarma oranı, bu iki oran arasında sürekli değişiyor.(Şekil 2)
Bir makine Mühendisi ise CVT şanzıman hakkında şunları söylemektedir:“Bu şanzıman
bize sonsuz vites sayısını teorik olarak vermektedir. Çünkü 1950 yıllarda denenen
traktörlerinde sistem gibi büyükçe koni tarzı bir parça düşünün bunun üzerinde gezen bir
kayış her noktasında farklı bir çap değerine sahip olacaktır. Koninin kesitini alırsanız ve
koni üzerinde ilerleseniz durum anlaşılacaktır. 2 mm sonra koninin bu noktadaki açı
azalacak ve böylece devam edecektir. Bu şu demektir: Elimizde sonsuz çapta dişli
bulunmaktadır ve istenilen noktaya giderek bu çap değeri yakalanabilir. O zaman da
istenilen tork değeri belli noktada yakalanabilir, elektronik de devreye girince bu noktanın
neresi olduğu saptanmakta ve araç devamlı değişen bir vitesli araç gibi hareket etmektedir.
Minimum benzin sarfiyatını elde etmek için çok iyi bir yoldur.
Tabiî ki ortada dişli olmayınca vites geçişlerindeki sarsıntı yaşanmayacak ve aynen
elektrikli motor gibi devir artınca hızın artması gibi devamlı ve sabit tork yakalanacaktır.
Bu konuda hibrit motor teknolojili araçları incelemenizi şiddetle öneririm, gelecekte bütün
yeni nesil araçlar bu şekilde motorlar ile donatılacaktır. Buna Türkiye’de Avrupa Birliği
meselesinden dolayı uymak zorundadır. Çünkü istenen emisyon değerleri artık klasik
araçlarımızla yakalayamayacağımız kadar düşük olacaktır.”
Attık CVT’ nin zamanının geldiği anlaşılmaktadır. Bunun iki sebebi vardır: Birincisi; en
son teknoloji CVT’ lerin otomobillere uygulanmasıyla sağlanan yakıt ekonomisi ve sürüş
performansı açısından bugünün karmaşık ve pahalı vites kutularını karşılaması, bunların
pratik ve ekonomik olma sınırlarına yaklaşmış olmalarıdır. İkincisi ise yakıt tüketimine
(Amerika’da CAFE şartları) ve egzoz emisyonuna dair giderek daralan sınır değerlere
sahip yönetmelikler otomotiv mühendisleri üzerinde bir baskı oluşturmuş ve yüksek
verimli, kararlı durumda çalışan motorların sınırlı devir sayısı kuşağı içerisinde
çalıştırılması ve kullanılması durumunu düşünmelerine neden olmuştur.
Taşıt hızına bakılmaksızın motor hızının kontrol edilebilmesi CVT’ lerin mükemmel
olarak üstesinden gelebildiği bir durumdur. Bu da CVT ‘ yi oldukça çekici hale
getirmektedir. Daha da ileri gidilirse, bu çevreyle ilgili yeni yönetmeliklerin değişik
tiplerdeki güç kaynaklarını kullanan hybrid taşıtların geliştirilmeleri konusunda bir baskı
oluşturacağı düşünülmektedir.

25
CVT Konstrüksiyonu
Modern bir CVT sistemi; temas yüzeyleri fazla derin olmayan koni şeklinde ve
genişlikleri değişken bir çift kasnak arasında çalışan, çok sayıda plakadan oluşmuş çelik
bir kayıştan meydana gelir. İtmeli blok V-kayışı, V-şeklindeki plakalara bağlantılı olan
çelikten yapılmış, ince, düz gerilim bantlarından oluşmuştur. Yaklaşık olarak 300 adet
plaka vardır ve herbiri 2 mm kalınlığa, 25 mm genişliğe ve 12 mm derinliğe sahiptir.
CVT basit olarak genişliği değişken, V-şekilli ve arasında kompozit çelik kayışın
bulunduğu bir çift kasnaktan oluşur. Her kasnak iki adet ve herbiri kısa, yarı konik
yüzeyden meydana gelir. Kasnaklar mil üzerinde bulunur ve kasnakların bir yarısı mile
katı bir şekilde monte edilirken diğer yarısı doğrusal bilyeli yuvalar üzerinde eksenel
yönde kayma serbestliği olacak şekilde monte edilir. Değişken hız oranları birinci giriş
kasnağı yardımıyla sıkı temas halinde bulunan kayışın efektif çapının arttırılması veya
azaltılması sonucunda ve buna cevap olarak ikinci çıkış kasnağının çalışma çapında azalma
veya genişleme yaratılarak elde edilir.
Birinci giriş yarı kasnaklar eksenel yönde birbirlerine yaklaştıkları zaman, aralarında
dönen V-şekilli kayış sıkıştırılır ve daha geniş çapta dönecek şekilde konik duvarlar
üzerinde tırmanmaya zorlanır. Tam aksine kayış uçsuz ve genişlemeyen bir kayış olduğu
için, ikinci çıkış kasnak yarıları birbirlerinden ayrılamaya zorlanır, bu hareket de kayışın
içeriye, daha küçük çapa doğru harekete zorlar (nçıkış>ngiriş).Bunun tersi olarak ikinci
çıkış yarı kasnakların birbirlerine doğru yaklaşacak şekilde çekilmesi sonuçta dönen
kayışın çapının genişlemesine neden olur. Bu nedenle karşı tarafta kayışın sardığı birinci
giriş kasnağının çapı düşürülür (ngiriş>nçıkış).
1:1 hız çevrim oranı her iki birincil ve ikinci kasnakların aynı kayış çapında çalışması ile
sağlanır (ngiriş=nçıkış) . Ford Fiesta örneğinde kasnaklar alt 2.6:1 ve üst 0.445:1 arasında
daimi değişken bir çevrim oranı sağlar. Ayrıca kayış çıkış kasnağı mili ve son ayna dişli
arasındaki 1.4:1 civarında çevrim oranına sahip bir ara dişli düzeni kullanılır.
CVT, tahrik momentini motordan alıp tahrik miline iletme görevini çok sık kullanılan
manuel ve otomatik transmisyonların aksine hidrodinamik prensipleri kullanan
mekanizmaları ve kasnak çaplarının değişmesi prensibini kullanmaktadır.
CVT Tipleri
Esas olarak 5 ana kategoriye ayrılan çok sayıda CVT çeşidi bulunmaktadır. Bunlar;
sürtünmeli, çekmeli, hidrostatik, hidrokinetik ve elektrikli tipleridir. Otomotiv sektöründe
çekme güçlü ve hidrokinetik CVT’ ler en çok kullanılanlarıdır. Üretimi yapılan en belirgin
tipleri ise PIV zincir tahrikli, Kumm düz kauçuk kayışlı, çekme tahrikli, hidrostatik ve
hidrodinamik (moment dönüştürücülü) CVT’ dir.
1.PIV Zincir Tahrikli CVT: PIV zincir tahrik sistemi iki farklı yarıçaptaki makaraları
birleştiren metalik bir zincir kayıştan meydana gelir. Döndüren ve döndürülen
makaralardan herbiri bir sabit döner oluklu ve bir kayar döner oluklu kasnaklardan
meydana gelir. Bu tip kuruluş tarzı dönme eksenlerinin sabit kalmasına izin verir ve zincir
kayış içerisinde oluşacak boşlukların önüne geçer.
2.Kumm Düz Kauçuk Kayışlı CVT: Konstrüksiyon ve çalışma prensibi bakımından PIV
zincir tahrikli CVT’ ye çok benzer. Bununla birlikte göze çarpan farklı özelliği metal zincir
kayışla karşılaştırıldığında kauçuk kayışın daha yüksek olan sürtünme katsayısıdır.

26
3.Çekme Güç Tahrikli CVT: Çekme tahriği sürtünmeli tahrikten prensip olarak tamamen
farklı çalışır. Bu sistem ortam olarak elasto-hidrodinamik akışkan filmi kullanır ve böylece
döner makaradan diğerine gücü iletir.
4. Hidrostatik CVT: Hidrostatik CVT sistemi, değişken stroklu hidrostatik bir pompa ve
değişken stroklu hidrostatik bir motordan meydan gelir. Motor şaftı çıkış olarak alınırken
pompa şaftı giriş olarak alınır. Pompa stroğunu, motor stroğunu ve sistem basıncını
değiştirerek hız oranı ve çıkış momenti kontrol edilebilir.
5. Hidrodinamik CVT: Moment dönüştürücüler geçmişte hidrodinamik transmisyon olarak
kullanılmışlardır. Halbuki günümüzde hız yerine çıkış momentini arttırmak için otomatik
transmisyonlarda kullanılır. Sistem temel olarak bit türbin, stator, yöneltici pervane ve
gücü ileten akışkandan oluşur.
Düşük motor momentlerinde hidrostatik CVT en büyük, PIV zincir CVT ise en düşük
verime sahiptir. Kumm’s düz kauçuk kayış CVT tipleri arasında en verimli olanıdır.
CVT’ nin Düz ve Otomatik Transmisyonlarla Karşılaştırılması manuel, otomatik ve CVT
(Continuously Variable Transmission) olmak üzere başlıca üç tip aktarma organı vardır.5
kademeli manuel vites kutusu küçük hacimlidir ve birkaç hareketli parçası vardır. Neticede
yüksek güvenilirlik ve düşük servis ihtiyacı elde edilir.
CVT tüm motor hızlarında yüksek performans sağlar. Aynı zamanda yakıt tüketimi
minimumda tutulur. Gaz pedalı konumundan, motor hızından ve momentinden gelen
bilgiler mevcut seyir şartlarına göre CVT sistemini devamlı şekilde ayarlayan hidrolik
kontrol sistemine gönderilir. Vites çevrim oranı motor yüküne ve aracın hızına bağlı olarak
devamlı değiştirilir.
CVT’ nin tabiatında mevcut olan verim, düz ve otomatik transmisyonların her ikisinin
sahip olduğu verimden biraz daha daha azdır (düz %85, otomatik %82, CVT %80
civarlarında). Bununla beraber CVT tarafından hız oranı sürekli olarak değiştirildiğinden
motorun en uygun devir sayısı aralığında çalışmasına müsaade edilir ve böylece bir uçtan
diğer uca olan aktarma organlarının verimi yükseltilir. Bu sürekli olarak vites değişimi
uygulanan şehir içi ve otoban trafiğindeki seyir şartlarında yakıt tüketiminin azaltılmasında
önemli bir rol oynar. İlave olarak CVT’ nin çevrim oranı aralığı daha geniş olduğundan
daha düşük hızlarda çalıştırılan motorda daha az gürültü meydana gelir.

27
Şekil 16 CVT Yakıt Tüketimleri
Aynı çalışmada 4 kademeli vites kutusu ile CFT 20 E nin ivmelenme performansına etkisi
karşılaştırıldığında CVT sisteminin daha iyi sonuç verdiği görülür (CFT 20 E: ZF firması
tarafından üretilen CVT şanzımandır).
Şekil 17 CVT İvmelenme
BMW firması tarafından arkadan çekişli bir taşıtta 4 kademeli otomatik vites ve CVT
uygulamasının karşılaştırılması sonucunda benzer şekilde CVT ile yakıt tüketiminde % 10
a varan azalmalar ve ivmelenmede %12 ye varan iyileşmeler sağlanmıştır.
CVT’ nin Düz ve Otomatik Transmisyonlarla Karşılaştırılması
Manuel, otomatik ve CVT (Continuously Variable Transmission) olmak üzere başlıca üç
tip aktarma organı vardır.5 kademeli manuel vites kutusu küçük hacimlidir ve birkaç
hareketli parçası vardır. Neticede yüksek güvenilirlik ve düşük servis ihtiyacı elde edilir.
28
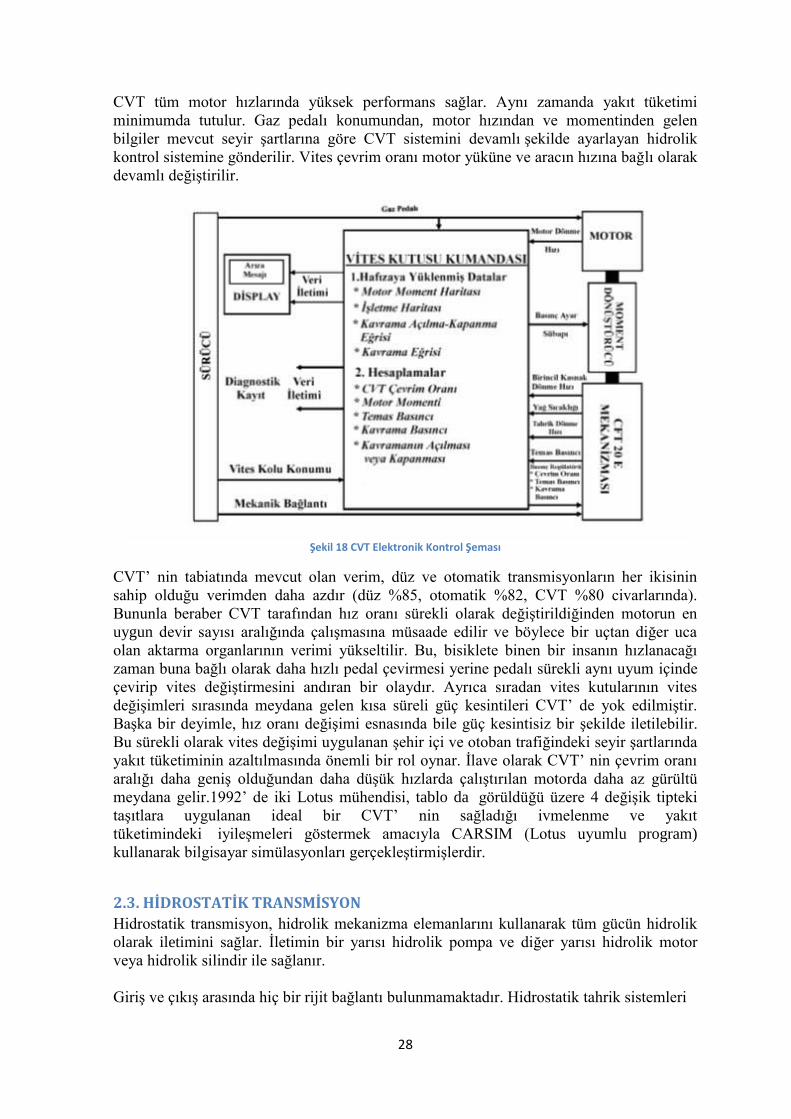
CVT tüm motor hızlarında yüksek performans sağlar. Aynı zamanda yakıt tüketimi
minimumda tutulur. Gaz pedalı konumundan, motor hızından ve momentinden gelen
bilgiler mevcut seyir şartlarına göre CVT sistemini devamlı şekilde ayarlayan hidrolik
kontrol sistemine gönderilir. Vites çevrim oranı motor yüküne ve aracın hızına bağlı olarak
devamlı değiştirilir.
Şekil 18 CVT Elektronik Kontrol Şeması
CVT’ nin tabiatında mevcut olan verim, düz ve otomatik transmisyonların her ikisinin
sahip olduğu verimden daha azdır (düz %85, otomatik %82, CVT %80 civarlarında).
Bununla beraber CVT tarafından hız oranı sürekli olarak değiştirildiğinden motorun en
uygun devir sayısı aralığında çalışmasına müsaade edilir ve böylece bir uçtan diğer uca
olan aktarma organlarının verimi yükseltilir. Bu, bisiklete binen bir insanın hızlanacağı
zaman buna bağlı olarak daha hızlı pedal çevirmesi yerine pedalı sürekli aynı uyum içinde
çevirip vites değiştirmesini andıran bir olaydır. Ayrıca sıradan vites kutularının vites
değişimleri sırasında meydana gelen kısa süreli güç kesintileri CVT’ de yok edilmiştir.
Başka bir deyimle, hız oranı değişimi esnasında bile güç kesintisiz bir şekilde iletilebilir.
Bu sürekli olarak vites değişimi uygulanan şehir içi ve otoban trafiğindeki seyir şartlarında
yakıt tüketiminin azaltılmasında önemli bir rol oynar. İlave olarak CVT’ nin çevrim oranı
aralığı daha geniş olduğundan daha düşük hızlarda çalıştırılan motorda daha az gürültü
meydana gelir.1992’ de iki Lotus mühendisi, tablo da görüldüğü üzere 4 değişik tipteki
taşıtlara uygulanan ideal bir CVT’ nin sağladığı ivmelenme ve yakıt
tüketimindeki iyileşmeleri göstermek amacıyla CARSIM (Lotus uyumlu program)
kullanarak bilgisayar simülasyonları gerçekleştirmişlerdir.
2.3. HİDROSTATİK TRANSMİSYON
Hidrostatik transmisyon, hidrolik mekanizma elemanlarını kullanarak tüm gücün hidrolik
olarak iletimini sağlar. İletimin bir yarısı hidrolik pompa ve diğer yarısı hidrolik motor
veya hidrolik silindir ile sağlanır.
Giriş ve çıkış arasında hiç bir rijit bağlantı bulunmamaktadır. Hidrostatik tahrik sistemleri

29
ekskavatörlerde, traktörlerde, forkliftlerde, vinç yürütme sistemlerinde, yük kaldırma
ekipmanlarında, tarım makinalarında, vs. kullanılmaktadır. Motor gücünü, aracın
tekerleklerine iletmek için birçok metot kullanılır. Bu metotlar, standart manuel
şanzımandan, daha karmaşık otomatik transmisyonlara kadar ve günümüzde araçların
tahrik edilmesinde en son yöntem olan hidrostatik tahrik sistemlerine kadar çeşitli şekilde
sınıflanmaktadır. Hidrostatik tahrik sistemlerinin en büyük avantajı, pistonlu pompanın
kam plakası açısının nötr pozisyonundan tam ileri veya tam geri pozisyonuna getirilerek
kontrol edilebilmesi ile sağlanan sınırsız hız oranlarıdır. Aracın yönü ve hızı pompanın
dönüş yönü değişmeden değiştirilebilmektedir.
Hidrostatik Sisteme Genel Bakış
Şekil 19 Hidrostatik Transmisyon
1 Değişken Deplasmanlı Pompa 7 Pompa ve Motor Gövde Sızıntı Hattı
2 Sabit veya Değişken Deplasmanlı Motor 8 Yüksek Basınç Hattı
3 Depo 9 Isı Eşanjörü
4 Veya valfi (Opsiyonel) 10 Isı Eşanjörü By-Pass Valfi
5 Filtre 11 Depo Dönüş Hattı
6 Şarj Pompası Giriş Hattı 12 Depo Doldurma

30
Şekil 20 Kapalı Devre Hidrolik Sistemin Tesisatının Gösterimi
Şarj Pompası Görevleri
• İç kaçaklardan dolayı hidrostatik transmisyon devresindeki kaybolan akışkanı yeniden
doldurur
• Piston deliklerini doldurur ve kirlenmeyi önler.
• Servo kontrollü pompa/motorlar için kontrol basıncını sağlar.
• Kontroller için akışkan sağlar.
• Ek fonksiyonlar için pilot sinyal basıncını sağlar.
• Akışkanın sıkıştırabilirliği & hortum genleşmesine karşı dengeleme yapar.
• Akışkanın soğumasını sağlar.
Araç Tahrik Şekilleri
• İki çeker
• Dört çeker
• İki yollu
• Patinaj kontrollü
Şekil 21 İki Çeker Sürüş Devresi

31
Şekil 22 Dört Çeker Sürüş Devresi
Şekil 23 İki Yollu Sürüş Devresi
Dört Çeker Sürüş Devresi
Selenoid akışın bölünme ve birleşmesini sağlar.
Çekici Güç Tanımı
TEmevcut > TEistenilen
TEistenilen = tırmanma yeteneği + yuvarlanma direnci + hızlanma kuvveti + Çekiş gücü
Şekil 24 Kuvvetlerin Gösterimi
Hidrostatik boyutlandırmada hızlandırma için kuvvet çoğu zaman göz önünde
bulundurulmaz.

32
TANIMLAR
Tırmanma yeteneği (G)
Taşıtın tırmanabileceği eğimin dikliğine göre belirlenir.
Çekici güç (TE)
Tahrik sistemi tarafından üretilen itici veya çekici kuvvetin miktarıdır.
Yuvarlanma Direnci (RR)
Çeşitli yüzeyler üzerinde tekerleklerin veya paletlerin yuvarlanmasına karşı direncin
miktarıdır.
Yuvarlanma Direnci Katsayısı (r)
Deneysel verilere bağlı olarak yüzey ve tekerlek tipine göre değişir.
Patinaj için Çekici güç
Kayma meydana gelmeden önce zemine iletilen kuvvetin maksimum miktarıdır.
Sürtünme kuvveti katsayısı (μ)
Deneysel verilere bağlı olarak yüzey ve tekerlek tipine göre değişir.
Çekiş gücü (DBP)
İtici ve çekici kuvvutleri oluşturmak için düz yüzeyde elde edilebilir artan çekici gücün
miktarıdır.
Tekerlek Dönme Yarıçapı (r)
Tam yüklü koşullardaki tekerleğin etkin yarıçapıdır.
Son Tahrik Oranı (FDR)
Hidrolik motor ve tekerlek veya palet arasındaki toplam azalmadır.
Tekerlek Tahrik Torku
Herbir tahrik tekerleğindeki elde edilebilir torktur.
Hacimsel Verim (Veff)
Basınç ile azalır / Akış ile artar.
Tork Verimi (Teff)
Basınç ile artar / Akış ile azalır.
Toplam Verim (OAeff)
Yüksek seviyelerde güç iletilirken sistemin boyutlandırılmasında önemli bir etkendir.
Köşe Gücü
Maksimum hız ve maksimum torkta aracın ileri gitmesi için ihtiyaç duyulan beygir
gücüdür. Eğri, güç kaynağının sınırlarını ifade etmek için gösterilir.
Motor Yüksek Rolanti
Yüksüz durumda iken motorun çalıştığı en yüksek devir.
Motor Devir Hızı (d/dnominal)
Nominal beygir gücünde motor hızı.
Motor Alçak Rolanti
Yüksüz durumda iken motorun çalıştığı rolanti hızı.
Motor Nominal Beygir Gücü (BG)
Nominal devirde motorun çıkış gücüdür.
Hesaplama Ve Boyutlandırma Metotları
Ürün seçimi birbirinden farklı parametreler tarafından belirlenir.
• Tork ve Güç İhtiyacı
• Deplasman (Akış miktarı)
• Basınç
• Sistem Dizayn Ömrü

33
• B10 yataklama veya L10 sistem ömrü açısından hesaplanır.
• Uygulamada çalışma zamanı
• > 5000 saat Ağır iş
• < 5000 saat Orta iş veya ağır iş
• < 500 saat Hafif iş
• Standart maliyet
Not: Ağır iş ürünlerinde B10 ömür oranı, bağlantı flanşlarında ve kapakda bulunan
yataklara göre belirlenir. Basınç, hız, baskı yükü, yan yük gibi bir takım koşulların
verilmesiyle, B10 yataklama ömrü tahmin edilebilir. Bu tahmini ömür saatlerle
belirlenirken yataklamanın %90’ı hala kullanılmaya hazırdır.
Sürüş Uygulamaları İçin Temel Prensipler
• Fonksiyonel araç performans parametrelerinin tanımlanması
• Yer hızı
• Çekici güç veya tırmanma yeteneği
• Araç ağırlığı ve ağırlık dağılımı
• Patinaj
• Genel sürüş düzenlemesi
• Motor Beygir gücü, Tork ve Motor devri
• Aerodinamik sürükleme genellikle ihmal edilir.
• Motor başlangıç tork verimi
• Yataklarda ve diğer mekanik parçalarda sürtünmeden kaynaklanan başlangıç direncinin
hesaba katılması için toplamın üzerine %10 eklenir.
• Aktarma organları verimliliği
• Dinamik frenleme
• Motor aşırı hızlanması
• Pompa veya motor aşırı hızlanması
• Değişken deplasmanlı motorlar
• Araç hızlanması / yavaşlaması
• İstenilen oran
• Kontrol tipi ve orifis boyutlandırılması
• Valf plakası tipi
Motor Çıkış Torku Formulleri
• Motor Deplasmanı ve delta basıncı Torku belirler.
(Tırmanma yeteneği, Çekiş gücü, Çekici Güç)
Motor Torku (Nm) = Motor Deplas. (cc/rev) x (Δ bar) / ((2π)(10))
Motor Troku (in-lbs) = Motor Deplas. (in3/rev) x (Δ PSI) / 2π
• Pompa devri, pompa & motor deplasmanı, giriş tahrik oranı ve son tahrik oranı hızı
belirler.
(Araç mil/saat, tekerlek devri (d/d), vb.. )
Motor hızı (d/d) = Pompa Hızı (d/d) x Pompa deplasmanı / Motor deplasmanı
Hidrostatik Transmisyon Boyutlandirilmasi Için Ana Esaslar
• Çalışma basıncı, zamanın yüzde 2 sinden daha fazlası için maksimum nominal basıncı
aşmamalıdır.
• Normal çalışma durumu süresinde pompa ve motor hızları ve basınçları, uygulanabilir
yerlerde optimal aralık değerleri içinde düzenlenir.

34
• Normal çalışma durumunda veya makina performansının kötü olarak alıgılanma
durumunda patinaj genel olarak yapılabilir durumda olmalıdır.
• Dinamik frenleme, hidrostatik tahrik arızalanma olayında kaybedilebilir. Bu yüzden,
ikinci bir frenleme sistemi sağlanmalıdır. Bu ikinci frenleme arıza meydana gelme
durumunda sistemi durdurabilme veya/ve bekleme yaptırabilmelidir.
Hidrostatik Sistemin Boyutlandırılmasındaki Adımlar
• Güç aralığı hesaplanması
• Motor seçimi
• Son tahrik oranı seçimi
• Pompa seçimi
• Aşırı hız hesaplanması
• Güç sınırlama basıncı & aşırı basınca çıkma
• Şarj pompası boyutlandırılması
Uygulama Bilgisi
Müşteri tarafından belirtilmesi gereken bilgiler
• Bir veya daha fazla çalışma vites aralıklarındaki araç çekici gücü ve hızı
• Bir veya daha fazla çalışma vites aralıklarındaki çekiş gücü ve hızı
• Bir veya daha fazla çalışma vites aralıklarındaki tırmanma yeteneği ve hızı
• Dişli kutusu çıkış torku ve hızı Motor seçimi
• Güç Aralık metodu
Aracın hesaplanan GA ‘sına eşit veya daha büyük GA ‘ya sahip bir motor seçilir.
• Direk Metod
Aracın hesaplanan tork değerine eşit veya daha büyük tork oranına sahip bir motor seçilir.
35
3. TORK ARTITICI ŞANZIMAN TASARIMI
3.1 SİSTEM GEREKSİNİMLERİ
3.1.1 Dişli Çarklar
Dişli çarklar dönme hareketini bir milden diğer mile, üzerindeki dişlerin birbirini
kavrayarak dönmesi ile iletir.
Avantajları
Dişli çarklar gerek paralel ve gerekse kesişen millerde çeşitli güç ve devir
sayılarında değişik çevrim oranlarında kullanılabilir.
Kayma söz konusu değildir.
İşletme emniyeti ve ömürleri yüksektir.
Fazla yüklenebilirler ve bakımları kolaydır.
Aynı güçte diğer makinelere oranla daha az yer işgal ederler ve verimleri yüksektir.
Dezavantajları
Pahalıdırlar
Gürültülü çalışırlar
Güç iletiminde elastikiyetleri yoktur.
Dişli çarklar; mil eksenleri arasındaki uzaklığın küçük olması, mil hızlarının kayış-kasnak
sistemiyle iletilmeyecek derecede düşük olması, miller arasında sabit bir hız oranının
istenmesi ve iletilecek gücün büyük olması halinde kullanılmalıdır.
Dişli Çark Çeşitleri
Paralel Miller (Alın dişli çarklar )
o Düz dişli çark
o Helisel dişli çark
o Ok dişli çark ( şevlon )
o Dairesel dişli çark
o Kremayer
Kesişen miller ( Konik dişli çarklar )
o Düz dişli
o Helisel dişli
o Daire yayı
Aykırı miller

36
o Spiral dişli
Sonsuz vida mekanizması
3.1.2 Paralel Miller ( Alın dişli çarklar )
3.1.2.1 Düz Dişli
Eksenleri birbirine paralel iki mil arasında hareket aktarmanın bir yolu dişli kullanmaktır.
Şekil 25 Çarklar
Düz dişliler imalatlarının kolay ve ucuz oluşu sebebiyle basit uygulamalar için genellikle
tercih edilirler. Fakat özellikle dişlerin bir anda kavramaya geçip bırakıyor olması
sebebiyle yüksek hızlarda ve büyük yüklerde tercih edilmezler.
Tasarımları ve üretilmeleri son derece kolaydır. Genellikle dişlilerden biri minimum diş
sayısında yapılmaya çalışılır. Böylece boyutlar minimumda tutulabilir. Fakat diş dibi
kesilmesi sebebiyle her modül ve çevrim oranı için inilebilecek bir alt sınır vardır.
3.1.2.2 Helisel Dişli
Düz dişlilerde dişlinin yükü aniden kavrayıp bırakmasının yarattığı sakıncayı ortadan
kaldırmak için dişlere helis açısı verilmiştir. Helis açısı sayesinde dişler yükü bir uçtan
başlayarak tedrici olarak kavrar ya da bırakırlar. Eş eksenli millere takılan dişlilerin helis
açıları birinde sağ, diğerinde sol olur.

37
Şekil 26 Helisel Dişli Çarklar
3.1.2.3 Ok Dişli
Helis dişlerde, açıdan dolayı mil yataklarına eksenel kuvvetler de gelir. Küçük helis açıları
ya da küçük yüklerde bunun karşılanması pek sorun yaratmaz. Fakat büyük yüklerde bu
sorundan kurtulmak için dişliler çift açılı yapılır ya da iki ters açılı diş kullanılır. Böylece
eksenel yük oluşmaz. Bu tür dişlilere ok dişli (çavuş dişli) adı verilir.
Şekil 27 Ok Dişli
3.1.2.4 Kremayer Dişli
Eğer düz dişlilerden biri sonsuz büyük çapta düşünülürse dişlinin şekli bir doğru halini alır.
Böyle bir dişli doğrusal hareketler elde edilmesinde kullanılabilir. Ayrıca kremayerin diş
profili tam bir trapez olduğundan imalatı da çok daha kolaydır. Kremayer dişlilerin trapez

38
açısı kavrama açısına eşittir. Kremayerler robotik uygulamalarda dairesel hareketi doğrusal
harekete çevirmek için kullanılan birkaç önemli mekanizmadan biridir.
Şekil 28 Kramiyer Dişli
3.1.3 Kesişen Miller ( Konik Dişli Çarklar )
Şekil 29 Konik Dişliler
Değişik açılarda, çoğunlukla 90 derecede, iki eksen arasında hareket iletmek için
kullanılırlar.
3.1.4 Aykırı Miller
3.1.4.1 Spiral Dişli
Helis açılı düz dişlilerle ilgili önemli bir husus, eş çalışan dişlerden birinin sağ diğerinin
sol yapılmasıdır. Böylelikle mil eksenlerinin paralelliği korunmuş olur. Fakat farklı eksen
açılarını tutturmak için değişik açılarda helisel düz dişliler de kullanılabilir. Bu dişlilere
spiral dişli de denir. (Sonsuz vida bu fikrin bir parça değiştirilmiş biçimidir). 45 derecelik
aynı helis açısına sahip iki dişli eşleştirildiğinde birbirine dik iki eksen oluşur. Ancak
helisel düz dişli bu şekilde çalıştırıldığında temas bir çizgi boyunca değil bir nokta
kadardır. Ayrıca sadece yuvarlanma değil sürtünme de meydana gelir. Bu sebeple sadece

39
güç gerektirmeyen yerlerde kullanılabilirler. (Örneğin rulolu konveyörler bu yöntemle
tahrik edilebilir.)
Şekil 30 Spiral Dişli
Aynı yönlü helis açılı iki dişli kullanılarak birbirlerine paralel olmayan iki mil arasında
hareket aktarılabilir. Bu tür dişlilere spiral dişli de denir. Böyle bir çözümün dezavantajları
noktasal ve sürtünmeli temastır. Bu nedenle büyük yükler için kullanılmazlar. Bir diğer
önemli nokta; sonsuz vida mekanizmasının temelde aynı yönlü iki helisel dişli olduğudur.
Fakat yük taşıma kabiliyetini artırmak için dişlilerin görünümü önemli ölçüde
değiştirilmiştir.
3.1.4.2 Sonsuz Vida Mekanizması
Eğer helisel düz dişli çiftinin açılarının yönlerini aynı yapıp, dişlilerden birisinin helis
açısını küçük seçip, diş sayısını sadece birkaç dişe indirirseniz, bir vida görünümünü
alacaktır. Ortaya çıkan dişli grubuna sonsuz vida denir. Noktasal temas ve yüzeyler
arasında sürtünme olduğundan birçok uygulama için avantajlı olmayacaktır. Fakat bu
temel yapıyı değiştirerek çarkın vidayı daha iyi sarması sağlanarak yük taşıma kabiliyeti
kolaylıkla artırılabilir. Bu iş için vida, çark yada her ikisi birbirlerini daha iyi kavrayacak
biçimde şekillendirilebilirler. Sonsuz Vida Mekanizmalarının en büyük avantajı küçük
hacimlerde büyük çevrim oranları sağlayabilmeleridir. En büyük kusurları ise sürtünmeden
dolayı kolay aşınmaları ve düşük verimleridir. Vidalar genellikle sertleştirilmiş çelikten
yapılırlar. Çarklar ise dişleri daha az çalıştığı için yumuşak bir malzemeden, çoğunlukla
bronzdan yapılırlar.

40
Şekil 31 Sonsuz Vida Mekanizmaları
3.1.2 Ana Boyutlar
3.1.2.1 Taksimat Dairesi
Üzerinde dişlerin taksimatı yapılan ve esas dişli çark büyüklüğünü belirleyen dairedir. Bu
daire üzerinde ölçülen ve bir diş kalınlığı ile bir diş arası boşluğu kapsayan uzunluğa diş
adımı (t) veya hatve denir. Dişli çarkın diş sayısı z ile gösterilirse, taksimat dairesinin
çemberi;
t zd 0
şeklinde yazılır. Buradan taksimat dairesi çapı;
zt
d0

41
veya modül
t
m dikkate alınırsa;
mzd0
olarak bulunur. Bu ifadedeki modül standart olup DIN 780’de verilmiştir.
İnch (parmak ) sistemi geçerli olan ülkelerde modül yerine diametral pitch (DP) ve
taksimat yerine circular pitch (CP) deyimleri kullanılır. İki sistem arasında
DP
4.25m ve CP085.8CP
4.25m
bağıntıları vardır.
3.1.2.2 Diş ve Dişli Boyutları
Şekil 32 Diş ve Dişli Boyutları
42
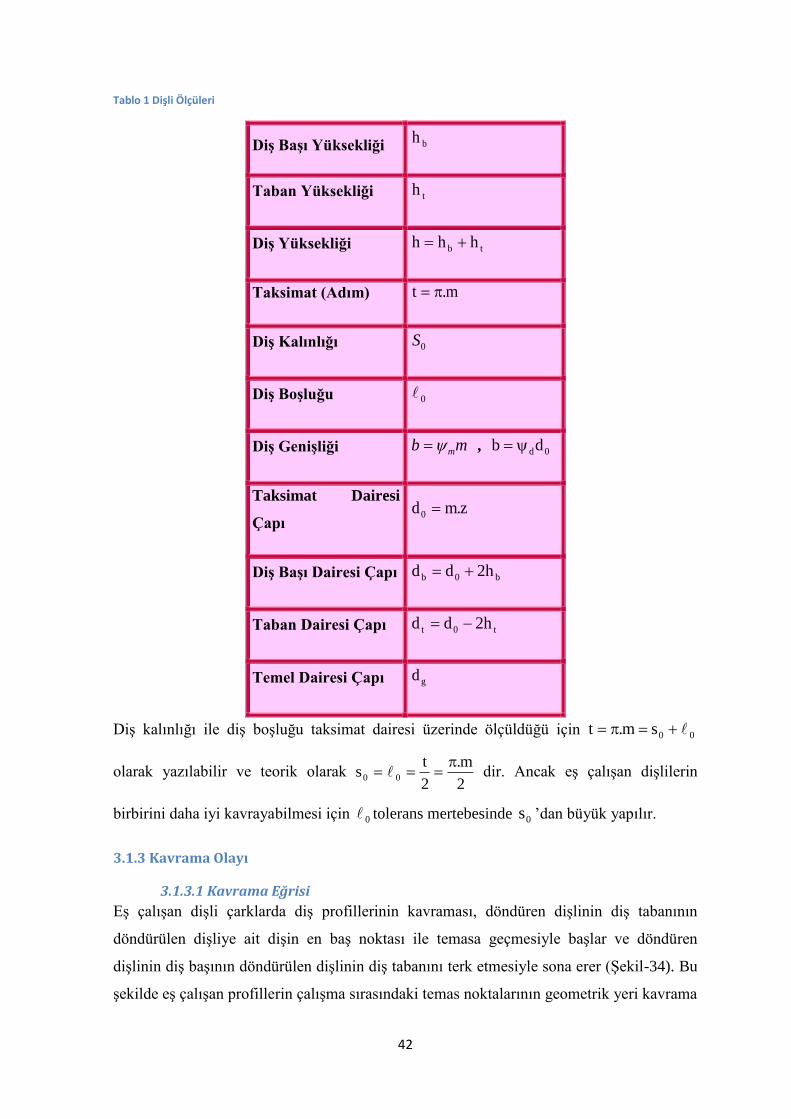
Tablo 1 Dişli Ölçüleri
Diş Başı Yüksekliği bh
Taban Yüksekliği th
Diş Yüksekliği tb hhh
Taksimat (Adım) m.t
Diş Kalınlığı 0S
Diş Boşluğu 0
Diş Genişliği mb m , 0ddb
Taksimat Dairesi
Çapı z.md0
Diş Başı Dairesi Çapı b0b h2dd
Taban Dairesi Çapı t0t h2dd
Temel Dairesi Çapı gd
Diş kalınlığı ile diş boşluğu taksimat dairesi üzerinde ölçüldüğü için 00sm.t
olarak yazılabilir ve teorik olarak 2
m.
2
ts 00
dir. Ancak eş çalışan dişlilerin
birbirini daha iyi kavrayabilmesi için 0 tolerans mertebesinde 0s ’dan büyük yapılır.
3.1.3 Kavrama Olayı
3.1.3.1 Kavrama Eğrisi
Eş çalışan dişli çarklarda diş profillerinin kavraması, döndüren dişlinin diş tabanının
döndürülen dişliye ait dişin en baş noktası ile temasa geçmesiyle başlar ve döndüren
dişlinin diş başının döndürülen dişlinin diş tabanını terk etmesiyle sona erer (Şekil-34). Bu
şekilde eş çalışan profillerin çalışma sırasındaki temas noktalarının geometrik yeri kavrama

43
eğrisini verir. Evolvent dişli çarklarda kavrama eğrisi bir doğru olur ve kavrama doğrusu
adını alır. Bu doğru dişlerin temas noktasında diş profillerine dik ve her iki dişlinin temel
dairelerine teğettir yani evolventi meydana getiren ana doğrunun kendisidir.
Şekil 33 Kavrama Eğrileri
Profillerin temas noktalarından biride C noktası olduğuna göre kavrama doğrusu C’den
geçmek zorundadır. C noktası dişli çarkların merkezlerini birleştiren 21OO doğrusu ile
yuvarlanma dairelerinin ortak teğetinin kesiştiği noktadır ve yuvarlanma noktası adını alır.
Kavrama doğrusunun her iki baş dairesi arasında kalan ve asıl kullanılan AE uzunluğuna
kavrama doğrusunun çalışma boyu denir. Kavrama boyunun AC kısmına giriş, CE kısmına
çıkış kısmı ve bunlara karşılık gelen açılara da giriş ve çıkış açıları denir.
Şekil 34 Kavrama Doğrusu

44
3.1.3.2 Kavrama Açısı
Kavrama doğrusu ile yuvarlanma dairelerinin C’den geçen ortak teğeti arasındaki açıdır.
Yuvarlanma daireleri dişli çarkların taksimat daireleri ile aynı ise kavrama açısı 0 alınır.
Dişli çarkın, kremayer veya kremayer şeklinde temsil edilen referans profili ile kavrama
halinde bulunduğu düşünülürse, kavrama açısı ile referans profilin yan yüzlerinin eğim
açısı arasında bir bağıntı kurulabilir. Referans profilin orta doğrusu dişli çarkın taksimat
dairesine teğet olduğu durumda, kavrama açısı referans profilinin yan yüzlerinin 0 açısı
ile eşittir. Bu durum sıfır veya standart yani mh b ve m.25.1h t değerlerine sahip olan
bir dişli için geçerlidir.
3.1.3.3 Basınç Açısı
Eş çalışan dişli çarklarda temasta olan diş yüzeylerinin her yüzey noktası için o noktadan
temel daireye çizilen teğet ile aynı noktayı dişli çark merkezine birleştiren doğru arasındaki
dar açıdır. Yuvarlanma dairesi üzerindeki yüzey noktası için basınç açısı kavrama açısının
aynıdır.
3.1.3.4 Kavrama Oranı
Eş çalışan dişli çark çiftlerinde hareketin devamlılığı için kavrama durumundaki bir diş
çifti ayrılmadan önce ikinci bir diş çiftinin birbirini kavraması gerekir. Başka bir deyimle,
bir diş çiftinin hareket süresi kavrama doğrusu üzerinde AE noktaları arasında devam
ederken, ikinci bir diş çiftinin taksimat dairelerinin yuvarlanma hareketine göre bir adım
boyu sonra kavrama doğrusu üzerinde temasa geçmeleri gerekir.
Kavrama oranı; kavrama doğrusunun faydalı uzunluğunun (çalışma boyunun) taksimat
dairesi üzerindeki izdüşümünün, dişli adımının kavrama doğrusu üzerindeki izdüşümüne (
et kavrama adımına ) bölünmesi ile elde edilir ve ile gösterilir. Kavrama oranı standart
dişliler için
0
00
2
2g
2
2b
2
1g
2
1b
cos.m..2
sin.a.2dddd
ifadesinden hesaplanır. Burada;
2b1b d ve d Baş dairesi çapları
2g1g d ve d Temel dairesi çapları

45
0a Dişli eksenleri arasındaki mesafe
m Modül
0 Kavrama açısıdır.
Kavrama oranı 1 olmalıdır. Aksi takdirde dişli çarklar sürekli çalışmazlar, darbe olur.
Yüksek devirde çalışan dişli çiftlerinde 4.1 kadar olmalıdır.
3.1.4 Genel Dişli Kanunu
Eş çalışan dişli çarklara ait bir çift dişin kavrama doğrusu üzerinde A gibi herhangi bir
noktada temas halinde olduğu düşünülsün (Şekil-3.11). Kavrama doğrusunun dişlilere ait
temel dairelerine teğet olduğu noktalar şekilde gösterildiği gibi 21TT ’dir.
Döndüren dişlinin açısal hızı 1 ve döndürülen dişlinin açısal hızı
2 olduğu takdirde, 1
dişlisine ait profilin temas noktasındaki çevre hızı;
111 .r
ve 2 dişlisine ait profilin temas noktasındaki çevre hızı
222 .r
olur. Her iki hızın doğrultuları, temas noktası A’yı dişli çarkların 21OO merkezlerine
birleştiren 1r ve
2r yarıçaplarına diktir.
Şekil 35 Dişli Kanununun Bulunuşuna Ait Yardımcı Resim

46
Profillere ait çevre hızları, 21TT kavrama doğrusu ile buna dik olan profillerin ortak teğeti
yönünde olmak üzere bileşenlere ayrılırsa 1 için
1u ve 1c ,
2 için 2u ve
2c bileşenleri
elde edilir. 1 dişlisi döndüren eleman olduğundan 21 cc olamaz. Diğer taraftan her iki
profil temas halinde bulunduğundan 21 cc de olamaz. O halde profillerin kavrama
doğrusu yönündeki hız bileşenleri 21 cc olması gerekir.
Dişli çark malzemelerinden 21TT kavrama doğrusuna birer dik indirir ( 1gr ve 2gr ),
kavrama doğrusunun 21OO doğrusunu kestiği noktaya C ve bu noktanın dişli çark
merkezlerine uzaklıklarına 1Or , 2Or denirse 21 cc şartından
coscos 21
yazılabilir. Burada;
111 .r , 1
1g
r
rcos
222 .r , 2
2g
r
rcos
olduğuna göre 2
2g
22
1
1g
11r
rr.
r
rr. ifadesinden
2g21g1 r.r. veya 12
1g
2g
2
1 ir
r
elde edilir. Burada 2
1
2
112
n
ni
çevrim oranıdır. Diğer taraftan CTO 11 ve CTO 22
üçgenlerinin benzerliğinden 1O
2O
1g
2g
r
r
r
r olduğundan
1O
2O
1g
2g
2
112
r
r
r
ri
şeklinde yazılır. 2
z.mr 1
1O ve 2
z.mr 2
2O değerleri ile çevrim oranı

47
1
2
1O
2O
1g
2g
2
112
z
z
r
r
r
ri
şeklinde elde edilir. Bu denkleme göre; bir dişli çark mekanizmasının sabit oranda bir hız
iletebilmesi ( sabiti12 olması için ) eş çalışan profillerin herhangi bir temas noktasındaki
ortak normali, daima her iki yuvarlanma dairesinin temas noktası olan C yuvarlanma
noktasından geçmelidir. Bu ifade genel dişli kanunu olarak bilinir.
Şekilde görüldüğü gibi A noktasındaki çevre hızlarının ortak teğet üzerindeki bileşenleri
1u ve 2u hızları birbirine eşit değildir. Bundan dolayı her bir dişli çarka ait dişlerin
profilleri teğet doğrultuda birbiri üzerinde kayar. Ancak C yuvarlanma noktasında kayma
yoktur.
Diş profillerinin birbiri üzerinde kayması sonucu dişlerde adhezyon aşınması meydana
gelir. Ancak diş profilleri C yuvarlanma noktasında temasta olduğu zaman kayma yoktur.
Kayma hızları kavramanın başlangıcındaki ve sonundaki noktalarda en büyük değerleri
alır. Dişlerin adhezyon aşınması da benzer şekilde olur.
Şekil 36 Dişlerde Aşınmanın Durumu
3.1.5 Diş Kuvveti
Döndüren dişliden döndürülen dişliye moment iletilirken birbiriyle kavrama durumundaki
dişlere gelen kuvvet kavrama doğrusu boyunca etkir ve bu kuvvete diş kuvveti veya
normal kuvvet adı verilir.
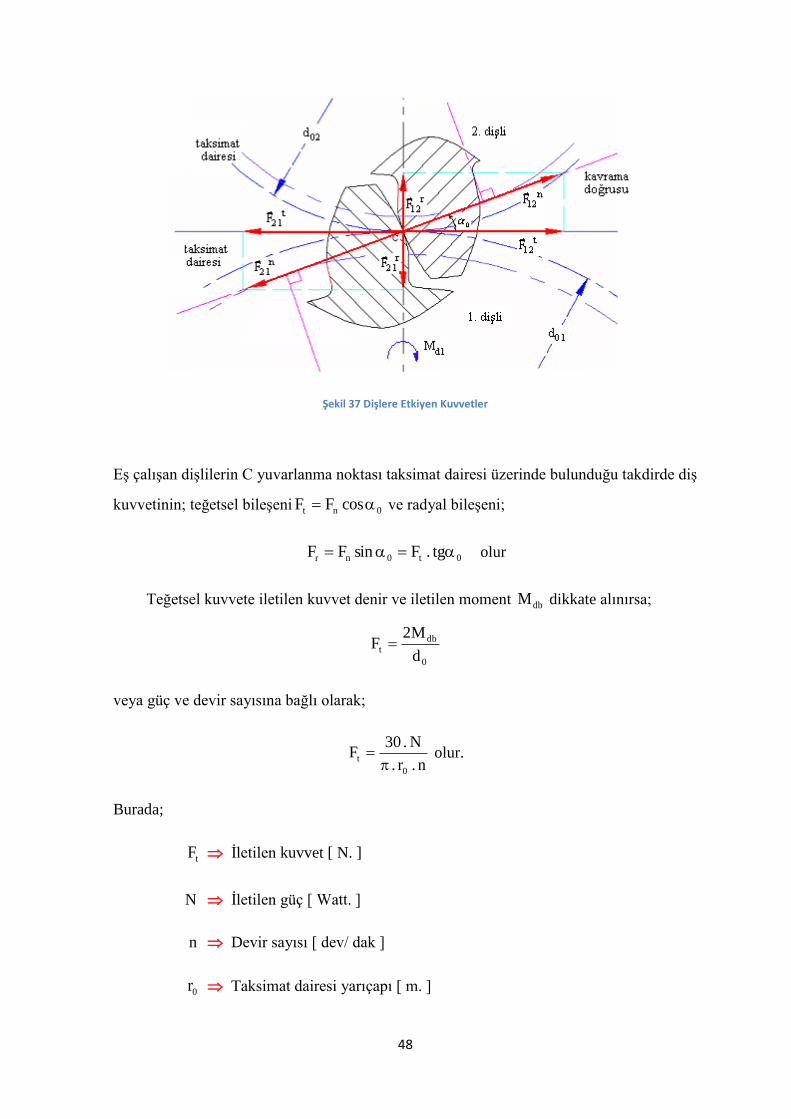
48
Şekil 37 Dişlere Etkiyen Kuvvetler
Eş çalışan dişlilerin C yuvarlanma noktası taksimat dairesi üzerinde bulunduğu takdirde diş
kuvvetinin; teğetsel bileşeni 0nt cosFF ve radyal bileşeni;
0t0nr tg . FsinFF olur
Teğetsel kuvvete iletilen kuvvet denir ve iletilen moment dbM dikkate alınırsa;
0
db
td
M2F
veya güç ve devir sayısına bağlı olarak;
n . r .
N . 30F
0
t
olur.
Burada;
tF İletilen kuvvet [ N. ]
N İletilen güç [ Watt. ]
n Devir sayısı [ dev/ dak ]
0r Taksimat dairesi yarıçapı [ m. ]

49
Eş çalışan dişlilerin C yuvarlanma noktası taksimat dairesinin dışında bir daire, örneğin
yuvarlanma dairesi üzerinde olduğu takdirde diş kuvveti nF aynı kalır. Fakat kavrama açısı
değiştiği için teğetsel ve radyal bileşenlerin değerleri değişir.
Dişli çarkların mukavemet hesaplarında esas olan diş kuvveti ncF ; işletme şartları, iç ve dış
dinamik kuvvetler ve imalat ve montaj hatalarından doğan diş genişliği boyunca diş
kuvvetinin farklı şekilde dağılması gibi hususlarda göz önüne alınarak nmv0nc FKKKF
ifadesinden hesaplanır. Burada;
0K Çalışma faktörü
vK Dinamik veya hız faktörü
mK Kuvvet dağılışı faktörüdür.
Bunlara ek olarak hesaplarda kavrama oranı faktörü K de kullanılabilir. Fakat bu faktörü
tam olarak tayin etmek oldukça zordur. DIN standartlarında verilen karışık yönteme göre
hesaplandığı takdirde değeri ortalama olarak 0,9 ile 1 arasında değişmektedir. Emniyet
faktörü de dikkate alındığı takdirde kavrama oranı faktörünün değeri 1 alınabilir.
3.1.5.1 Diş Dibi Gerilmeleri
Deneylerden elde edilen sonuçlara göre eş çalışan dişlilerde en büyük gerilmeler diş
tabanında meydana gelir ve kırılmalar bu bölgede olur. Yorulma özelliği taşıyan bu
kırılmalar, çekme gerilmelerinin bulunduğu bölgede bir çatlak ile başlar. Zamanla bu
çatlak yavaş yavaş ilerler ve alan dişe gelen yükü karşılayamayacak hale geldiği anda
biden bire kopma meydana gelir.
Diş tabanında meydana gelen gerilmelerin hesabı için diş tabanındaki kırılma kesitine
kadar olan eğilme kolu uzunluğunun qh ve kırılma kesiti kalınlığının qs tespit edilmesi
gerekir. Bu hususta dişin yükleme durumuna göre iki yöntem vardır.
Levis Yöntemi;
Bu yönteme göre diş kuvvetinin etkime noktası, kavrama sırasında eş diş çiftinin
kavramada yalnız kaldığı üst tekil yükleme noktası olarak kabul edilir. Kuvvetin etki
doğrultusunun, yani kavrama doğrusunun diş simetri eksenini kestiği noktadan eşit eğilme
momentli bir cisim çizilirse bir parabol elde edilir. Bu parabolün diş yan yüzeylerine teğet

50
noktaları qs kırılma kesiti kalınlığını belirler. Eğilme kolu uzunluğu ise şekilde
gösterildiği gibi alınır.
Şekil 38 Levis Yöntemi
DIN standardına göre;
Bu standart tarafından kabul edilen yöntemde, diş kuvvetinin etki noktası kavramanın
başlangıcını belirten A noktasıdır. Bu yönteme göre diş tabanındaki her iki kavisten diş
simetri ekseni ile 30 ’lik açı yapan bir doğru çizilirse qs kırılma kesiti kalınlığı
belirlenmiş olur. Eğilme kolu qh ise kavrama doğrusunun diş simetri eksenini kestiği
nokta ile kırılma kesiti arasındaki uzaklıktır.
Şekil 39 DIN Standartlarına Göre

51
3.1.6 Kontrol Hesabı
Dişlerin mukavemeti göz önüne alınırsa, dişlerin kırılmaması için
SKKKK
m.b
F*
D
mv01f
t
1
SKKKK
m.b
F*
D
mv02f
t
2
şartları ayrı ayrı sağlanmalıdır. Burada *
D dişin mukavemet sınırını göstermekte olup
DzLR
ç
by*
D KKKK
KK
S Emniyet katsayısı
yK Yüzey düzgünlüğü faktörü
bK Büyüklük faktörü
çK Çentik faktörü
RK Güvenirlik faktörü
LK Ömür faktörü
zK Zorlanma faktörü
D Standart deney çubuğunun sürekli mukavemet sınırıdır.
3.1.7 Boyutlandırma Hesabı
Boyutlandırma için, yukarıda verilen gerilme ifadelerinden küçük dişliye ait 1 ifadesinde
mb m , 101 z.md , 01
1dt
d
M2F ,
S
*
Dem
değerleri kullanılarak ifade m modülüne göre düzenlenirse;
3mv01f
emm1
1d KK.K.Kz
M2m
52
veya 01d d.b değeri kullanılırsa; 3 mv01f
emd
2
1
1d KK.K.Kz
M2m
bağıntısı elde edilir.
3.1.7.1 Pratik Hesap Yöntemi İçin Veriler
Diş Sayısı;
Dişli çark mekanizmasının boyutları alt kesilme, kavrama oranı ve verim gibi hususlara
bağlı olarak belirlenir. Genellikle bu hususları bağdaştıran en uygun çözüm yolu küçük
dişlinin diş sayısını 20........161 z olarak seçmektir. Verim ve düzgün çalışmanın önemli
olduğu genel maksatlar için kullanılan dişlilerde 26........201 z seçilebilir. Vites
kutularında olduğu gibi tüm boyutun önemli olması halinde ise 16........111 z olarak
alınabilir.
Küçük dişlinin 1z diş sayısı seçildikten sonra büyük dişli çarkın diş sayısı
1122 ziz
bağıntısı ile hesaplanır.
Genişlik Faktörü;
m genişlik – modül veya d genişlik – çap oranları dişli çarkın yük taşıma kabiliyetini,
yükün diş genişliğince dağılımını ve işleme kabiliyetini etkiler. Teorik olarak m veya
d ve buna bağlı olan dişlinin b genişliği arttıkça dişli çarkın yük taşıma kabiliyeti artar.
Ancak b diş genişliği büyük olduğu takdirde, gerek millerin deformasyonları ve gerekse
işleme hatalarından dolayı yükün bir tarafa yığılmasına ve buna bağlı olarak köşe
kırılmalarına yol açar.
Bu faktörler göz önüne alınarak yataklama durumlarına göre 01
dd
b değerleri tabloda
ve dişlilerin kullanım alanlarına göre genişlik faktörü değerleri tabloda verilmiştir.

53
Tablo 2 Yataklama Durumuna Göre Genişlik Çap Oranları
Yataklama durumu 01
dd
b
Her iki taraftan yataklanmış normal dişli çark
Rijit ve doğru olarak yataklanmış, iyi işlenmiş dişli çark 0.1
Türbin mekanizmalarında kullanılan kalitesi yüksek olan dişli çark 2
İyi yataklanmış veya kalitesi düşük olan dişli çark 4.0
Tablo 3 Genişlik Faktörü
Dişli çarkın kullanım alanı Genişlik –modül oranı Genişlik çap oranı
Genel maksatlar için 18....14m
bm 2.1....8.0
d
b
01
d
Hacmin sınırlı olduğu sistemlerde
(vites kutularında)
12....6m
bm 8.0....25.0
d
b
01
d
Dinamik veya Hız Faktörü;
vK genellikle taksimat ve profil hatalarına, çevre hızına, dönen sistemlerin rijitliğine,
birim diş genişliğine gelen kuvvet b
Ft ’ye ve dişlerin rijitliğine bağlıdır. Dinamik faktörün
bütün bu etkenlere bağlı olarak verilmesi mümkün olmamakla beraber, pratikte dişli çarkın
kalitesine ve çevre hızına göre verilmektedir. Dinamik faktörün değerleri tabloda
verilmiştir.
5.0

54
Tablo 4 Dinamik veya Hız Faktörü (KV )
Yük Dağılım Faktörü;
mK değerleri millerin rijitliğine ve dişlerin işlenme doğruluğuna bağlı olarak
2mm
daN350HB olan malzemeler ve 8. kalitedeki dişliler için tabloda verilmiştir. Daha
kaliteli ( 7. ve bunun altındaki kaliteler ) veya kaba ( 9. kalite ) dişliler için tablo değerleri
%5 ile 10 arasında azaltılabilir veya artırılabilir. 2mm
daN350HB olan dişli çarklar için
)1K.(5.0K mTablom olarak alınabilir. Plastik malzemeden yapılan dişliler için 1Km
alınabilir.
Kalite
Yüzey
sertliği
HB
Çevre hızı V [m/sn.]
<3 3…8 8…12 12…18 18…25
6
350
>350
-
1
1
1.1
1
1.2
1.1
1.4
1.2
7
350
>350
1
1
1
1
1.2
1.1
1.3
1.2
1.5
1.3
8
350
>350
1.1
1.1
1.3
1.2
1.4
1.3
- -
9
350
>350
1.2
1.2
1.4
1.3
- - -

55
Tablo 5 Yük Dağılım Faktörü (Km )
01
dd
b
Her iki taraftan
simetrik olarak
yataklanmış
dişli
Asimetrik olarak yerleştirilmiş
dişli
Karışık
şekilde
yerleştirilmiş
dişli Çok rijit mil
Rijitliği daha
az olan mil
0.2 1 1 1.05 1.15
0.4 1 1.04 1.10 1.22
0.6 1.03 1.08 1.16 1.32
0.8 1.06 1.13 1.22 1.45
1.0 1.10 1.18 1.29 -
1.2 1.14 1.23 1.36 -
1.4 1.19 1.29 1.45 -
1.6 1.25 1.35 1.55 -
Çalışma Faktörü;
0K ’ın değerleri, güç kaynağı ve iş makinesine bağlı olarak tabloda ve elektrik motoru ile
tahrik edilen iş makineleri için tabloda verilmiştir.

56
Tablo 6 Güç Kaynağı Ve İş Makinesine Bağlı Olarak Çalışma Faktörü
İş makinesi
Tahrik motoru
Tek silindirli
pistonlu
motor
Elektrik
motoru
Türbin/çok
silindirli pistonlu
motor
Jeneratör, bantlı konveyör, hafif
asansörler, karıştırıcılar, turbo
kompresörler
1 1.25 1.5
Takım tezgahı, büyük asansör,
kren, çok silindirli pistonlu pompalar,
maden ocağı havalandırıcıları
1.25 1.5 1.75
Zımba, haddehane makineleri,
kepçeler, ağır makineler
1.75 2 2.25
Tablo 7 Elektrik Motoru İle Tahrik Edilen İş Makineleri İçin Çalışma Faktörü (K0 )
Kullanım alanı
Devamlı çalışma süresi
10 saat 24 saat
Karıştırıcılar;
Sıvı
Sıvı ve katı
Çeşitli yoğunluktaki sıvılar
1.00
1.25
1.25
1.25
1.50
1.50
Körükler; 1.00 1.25

57
Santrifüj
Kanatlı
1.00 1.25
Kompresörler;
Santrifüj
Tek silindirli
Çok silindirli
1.00
1.75
1.25
1.25
1.75
1.50
Konveyörler;
Yükleme tarzı düzgün
Yükleme tarzı ağır ve düzgün olmayan
Yükleme tarzı çok ağır
1.00
1.25
1.75
1.25
1.50
1.75
Kırıcılar;
Taş
Şeker
1.75
1.75
1.50
Elevatörler;
Yükleme tarzı düzgün
Yükleme tarzı ağır
1.00
1.25
1.25
1.50
Fanlar;
Santrifüj
1.00 1.25
Takım tezgahları;
Yardımcı mekanizmalar
1.00
1.25
1.25
1.50

58
Ana mekanizmalar
Pompalar;
Santrifüj
Tek etkili, üç veya daha çok silindirli
Çift etkili, üç veya daha çok silindirli
1.00
1.25
1.25
1.25
1.50
1.50
Form Faktörü;
fK değerleri diş sayılarına bağlı olarak değişik profil kaydırma değerleri için şekilde
verilmiştir.
Figure 1 Form Faktörü(KF)
Dişli Çarkın Emniyet Gerilmesi
em dişli çark malzemesinin DZLR
ç
by*
D KKKK
KK ifadesinden hesaplanan
mukavemet sınırı değerinin S emniyet katsayısına bölünmesi ile elde edilir. Dişli çark
mukavemet sınırını ifade eden faktörler iyi tahmin edilirse S=2 alınması tavsiye edilir.

59
Tablo 8 Dişli Çark Malzemesinin Sürekli Mukavemet Sınırı
Kopma mukavemeti 2K
mm
daN140 olan çelikler için KD 5.0
Kopma mukavemeti 2K
mm
daN140 olan çelikler için
2Dmm
daN70
Malzemenin Sürekli Mukavemet Sınırı
D Winter ve Rettig’in yaptıkları deneylere göre dişlerin yorulma diyagramları Wöhler
tipinde olup şekilde verilmiştir.
Figure 2 Dişlerin Yorulma Diyagramı
Büyüklük Faktörü
bK ’nin değeri modüle bağlı olarak
Tablo 9 Büyüklük Faktörü (Kb )
.mm5m için 1Kb
.mm5m için 85.0K b

60
Yüzey Düzgünlüğü Faktörü
yK için değerler malzemenin kopma mukavemetine bağlı olarak şekilde verilmiştir.
Figure 3 Yüzey Düzgünlüğü Faktörü (Ky)
Çentik Faktörü
çK diş tabanının dişli gövdesine birleştiği geçiş yerinde meydana gelen gerilme
yığılmalarını göz önüne alan bir faktördür ve 1K.q1K tç denkleminden bulunur.
Burada q- çentik hassasiyet faktörü ve tK - teorik çentik faktörüdür. tK ’nin değerleri
çentik olayını etkileyen t
t
2
S
oranına yani diş tabanının tS kalınlığına ve geçiş yerindeki
kavisin t yarıçapına bağlı olarak verilmiştir. Diş tabanının kalınlığı yaklaşık olarak
m..5.02
tSt bağıntısı ile hesaplanır. t yarıçapının minimum değeri ise tr değerine
bağlı olarak;
TB
0
2
TBT.mint
rxmsm2
d
rxmsmr
bağıntısından hesaplanır.

61
Figure 4 Çentik Faktörü (Kç)
Kolaylık sağlamak amacıyla 200 , .mm1m , diş taban yüksekliği .350.2 mmht ,
.mm350.0rT için mint değerleri profil kaydırma faktörü x’e ve diş sayısı z’ye bağlı
olarak aşağıda verilmiştir.
Figure 5 Profil Kaydırma Faktörü
Bu şekilde t
t
2
S
oranı hesaplanır. Buna göre şekilden tK ’nin değeri tayin edilir. Dişin
mukavemet hesabında kuvvetin etki noktası diş başı (A noktası) alındığından şekildeki
eğrilerden 0 eğrisi kullanılacaktır.

62
Figure 6 Dişlerin Çentik Faktörü (Kt)
Dişlerin çentik faktörü tK ’nin tayininde şekilde verilen diyagramda kullanılabilir. Bu
diyagram dikkate alınırsa tS ve t değerleri diyagramda verilen b ve r boyutları ile eşdeğer
anlam taşır. Ayrıca B boyutu bir dişe karşılık gelen gövde kalınlığı olarak kabul edilebilir.
Genellikle dişli çarklarda 3b
B
S
B
t
olarak alınabilir.
Örneğin 20z ve 0x için şekilden m.44.0mint olarak bulunur. Buna göre;
28.0m.5.0
m.44.0
Sb
r
t
mint
olarak hesaplanır. Eğer 3b
B olarak kabul edilirse şekilden 4.1K t olarak tayin edilir.
şekilden 95.0 alınırsa;
38.114.195.011K.q1K tç
olarak hesaplanır.
Ömür Faktörü (LK )
KD 5.0 bağıntısı ile ifade edilen D sürekli mukavemet sınırı
7
0 10NN yük
tekrarı sayısı yani sonsuz ömür için geçerlidir. Daha küçük ( 0NN ) yük tekrarı sayısı
yani sonlu ömür için elemanın ZDN mukavemet sınırı D
ZDN
LK
ömür faktörü ile göz
önüne alınır. Bu faktörün değerleri tabloda verilmiştir.

63
Tablo 10 Ömür Faktörü (KL )
Ömür
N
Yüzey basıncı hesabına
bağlı olan ömür faktörü
( 0LK )
( silindirik ve konik dişliler
için)
Mukavemet hesabına bağlı olan ömür faktörü (
LK )
Silindirik dişliler Konik
dişliler
160
HB
250
HB
450
HB
Sementasyo
n*
Sementasyo
n*
103 ….. 1.6 2.4 3.4 2.7 4.6
104 1.5 1.4 1.9 2.4 2.0 3.1
105 1.3 1.2 1.4 1.7 1.5 2.1
106 1.1 1.1 1.1 1.2 1.1 1.4
107 1.0 1.0 1.0 1.0 1.0 1.0
* Sementasyon halinde yüzey sertliği minimum 55 HRC olmalı
Güvenirlik Faktörü (RK )
Malzemenin sürekli mukavemet sınırları geniş bir dağılım gösterir, Şöyle ki KD 5.0
bağıntısı ortalama yani %50 güvenirlik için geçerlidir. %50 güvenirliği esas alarak daha
yüksek güvenirlik tabloda verilen güvenirlik faktörü ile göz önüne alınır.
Tablo 11 Güvenirlik Faktörü (KR)
R Rz RK
50 0 1.000
90 1.288 0.897
95 1.645 0.868
99 2.300 0.814
99.9 3.095 0.752
99.99 3.700 0.704

64
Tablo 12 Zorlanma Faktörü (KZ )
Sık sık yön değiştiren dişlilerde 1K Z
Tek yönlü çalışan dişlilerde 4.1K Z
Tablo 13 Tablo 13 Dişli Çark Malzemelerinin Mekanik Özellikleri
Malzeme Malzeme
sembolü Isıl İşlem
Kopma
Mukavemeti
K
[daN/mm2]
Akma Sınırı
AK
[daN/mm2]
Brinel
Sertliği
HB
[daN/mm2]
Düşünceler
Çelik
(TGL 14315)
GS-50.1
GS-60.1
tavlanmış
50
60
26
32
150
175
Makine Çeliği
(TGL 7960)
St 42
St 50
St 60
St70
tavlanmış
42….52
50….62
60….72
70….85
24
28
32
35
125
150
180
208
Islah Çelikleri
(TGL 6547)
C 45
C 60
37 MnSi
5
37 MnSi
5
Islah edilmiş
60….72
70….85
70….85
80….95
80….95
36
44
45
55
55
185
210
220
260
260
Hafif
nitrasyon
yoluyla yan
yüzeylerin
mukavemeti
arttırılmış

65
34 Cr 4
42 CrMo
4
90….105 70 340
Sementasyon
çeliği
(TGL 6546)
C 10
C 15
16 MnCr
5
15 CrNi 6
20 MnCr
5
20 MoCr
5
18 CrNi 8
Sertleştirilmiş
42….55
50….65
80….110
90….120
100….130
110….120
120….145
25
30
60
65
70
-
80
390
637
650
650
650
650
650
K ,AK için
verilen
değerler
çekirdek için
geçerlidir
Alev veya
indüksiyonla
sertleştirilmiş
çelik
(TGL 6773)
C 45
37 MnSi
5
40 Cr 4
Sertleştirilmiş
65….80
90….105
90….105
40
65
65
595
560
587
Gaz ile
karbürlenmiş
Siyanür
banyosunda
sertleştirilmiş
çelik
40 Cr 4
37 MnSi
5
Sertleştirilmiş
140….180
150….190
-
100….125
595
550
Lamelli graf.
dökme demir
GGL-20
GGL-25
-
20
25
-
-
170
210

66
(TGL 14400)
Küresel graf.
dökme demir
(TGL 8189)
GGG-45
GGG-50
GGG-60
-
45
50
60
35
35
42
170
200
230
Tablo 14 Dişli Çark Malzemelerinin Yüzey Basınç Özellikleri
Malzeme Çiftleri
Malzeme
Faktörü
2mm/daNEK
Pinyon Çark
Malzeme Semb
ol
Elastiklik
modülü
]2
mm/daN[1
E
Malzeme Sembol
Elastiklik
modülü
]2
mm/daN[2
E
Çelik St 21000
Çelik St 21000 85.7
Çelik döküm
GS-60 20500 85.2
GS-52 20500 85.2
Küresel grafitli
dökme demir
GGG-50 17600 81.9
GGG-42 17500 81.7
Dökme kalay
bronzu
G-SnBr
14 10500 70.0
Dövme kalay SnBr-8 11500 72.1

67
bronzu
Lamelli grafitli
dökme demir (gri
döküm)
GGL-25 12800 74.6
GGL-20 12000 73.1
Çelik
döküm GS-60 20500
Çelik döküm GS-52 20500 84.7
Küresel grafitli
dökme demir GGG-50 17600 81.4
Lamelli grafitli
dökme demir (gri
döküm)
GGL-20 12000 72.8
Küresel
grafitli
dökme
demir
GGG-
50 17600
Küresel grafitli
dökme demir GGG-42 17500 78.4
Lamelli grafitli
dökme demir (gri
döküm)
GGL-20 12000 70.7
Lamelli
grafitli
demir
GGL-
25 12800
Lamelli grafitli
dökme demir (gri
döküm)
GGL-20 12000
65.8
GGL-
20 12000 64.8

68
Figure 7 Yuvarlanma Noktası Faktörü
Diş profillerinde çalışma sonucu yorulma aşınmasının meydana gelmemesi için emmax PP
şartının sağlanması gerekir. Yüzey basıncı ifadesinde
01
1d
101
td
M2
n.r.
N30F
yazılırsa
emmv02
01
1d
1Emax PK.K.Kd.b
M2K.K.KP
olur ve bu denklem kontrol hesabında kullanılır.
Boyutlandırma için 01d d.b ve 101 z.md değerleri ile
32
i
22
Emv02
emd
1d
1
K.K.K.K.K.KP.
M2
z
1m
bağıntısı bulunur.

69
Diğer taraftan 01d d.b ve 1i
a.2d
12
0
01
değerleri dikkate alınırsa
3 2
i
22
Emv02
emd
1d
120 K.K.K.K.K.KP..4
M1ia
ifadesi elde edilir. Bu ifade profil kaydırmalı dişliler içinde geçerlidir.
Denklemi basitleştirmek amacıyla iE1 K.K.KK ve mv02 K.K.KK ifadeleri
kullanılırsa, yukarıdaki bağıntılar;
em2
01
1d
1max PKd.b
M2KP
3 2
2
12
emd
3
1
1d K.KP..z
M2m
2
2
12
emd
1d
12 K.KP..4
M1ia
şeklinde yazılabilir.
3.1.8 Silindirik Helisel Dişli Çarklar
Helisel dişliler düz dişlilere oranla daha sessiz çalışırlar ve daha büyük güçlerin
iletilmesinde kullanılırlar. Diş profilleri dişli çark dönme eksenine paralel olmayıp helis
açısı denilen 0 açısı kadar eğiktir.
Avantajları
Helisel dişli çarklar daha sessiz çalışırlar, bunun nedeni dişlerin birbirlerini
kavramaları ve ayrılmamalarının ani olmaması ve aynı anda birden fazla dişin
kavrama durumunda bulunmasıdır.
Aynı ölçülerdeki düz dişlilere oranla daha fazla yük taşırlar ve diş şekil hatalarına
karşı daha az hassastırlar.
Dezavantajları
Dişler eğik olduğundan eksenel kuvvetler meydana gelir. Bu ise yataklarda daha
fazla güç kaybı demektir.

70
Helis açısı 0 ’ın değerinin artması halinde aynı diş sayısı ve modül için dişli çapı
ve iki dişli arasındaki eksen mesafesi düz dişli çarklara göre artar.
3.1.8.1 Düz Dişli Mekanizmalara Göre Helisel Dişli Mekanizmaların Özellikleri
Helisel dişli çarkların taksimatı ve buna bağlı olan modülü alın veya normal kesitte ifade
edilebilir. Alın kesitteki taksimat 0at ve normal kesitteki taksimat 0nt ile ifade edilirse
a0a m.t ve n0n m.t
olur. Bu bağıntılara göre, alın modülü am ile normal modülü nm arasında
a
n
a
n
0a
0n
0m
m
m.
m.
t
tcos
bağıntısı vardır. Normal referans profili standart olup hesaplarda kullanılan standart modül
nm normal modülüdür.
Şekil 40 Düz Dişli Mekanizmalara Göre Helisel Dişli Mekanizmaların Özellikleri
Helisel dişli çarkların taksimat dairesinin çapı; zcos
mz.md
0
na0

71
Her iki kesitte kavrama açıları farklı olup alın kavrama açısı 0a ile normal kavrama açısı
0n arasında 0
0n
0acos
tgtg
bağıntısı vardır. Burada standart kavrama açısı olarak normal
kavrama açısı 200n alınır.
Helisel dişli çarkların temel dairesinin çapı; 0aa0a0g cos.m.zcos.dd şeklinde ifade
edilir.
Diş başı dairesi çapı n0b m2dd
Taban dairesi çapı n0t m5.2dd
Taban dairesi üzerindeki diş kalınlığı 2
m.
2
tSS n0n
02n01n
Eksenler arası mesafe )zz(cos2
m
2
dda 21
0
n0201
0
Diş genişliği nm m.b dir.
Helisel dişlinin bir eşdeğer düz dişli çarkı tarif edilebilir. Helisel dişli, diş doğrultusuna dik
bir düzlemle kesilirse eksenleri 00 cos
2
dan ve
2
db 0
n olan bir elips bulunur.
Şekil 41 Helisel Dişlinin Bir Eşdeğer Düz Dişli Çarkı

72
Bu elipsin C noktasındaki eğrilik yarıçapı 0nr ile bir daire çizilirse ve bunun üstüne helisel
dişlinin 0nt taksimatı ile dişler dizilirse, bir düz dişli çark elde edilir. Tamamen teorik olan
bu düz dişli çarka, helisel dişlinin eşdeğer düz dişli çarkı denir. Eşdeğer düz dişli çarkın
taksimat dairesinin yarıçapı 0
2
0
n
2
n0n
cos.2
d
b
ar
olarak tarif edilirse
2
mzr n
e0n ve
0
n0
cos
mzd
değerleri ile eşdeğer dişli çarkın diş sayısı
0
3ecos
zz
olarak bulunur.
Teorik olarak helisel dişli yerine eşdeğer düz dişli alınır ve 0 yerine 0n , m yerine nm ,
1z ve 2z yerine 1ez ve 2ez yazılırsa düz dişli çarklar için elde edilen bağıntılar helisel
dişliler içinde geçerli olur.
Helisel dişlilerde alt kesilmeyi sınırlayan diş sayısı 0
3
minminh cos.zz veya pratik min.
diş sayısı 0
3min
/minh
/ cos.zz olarak elde edilir. Burada minz ve min
/z düz dişlilere ait
minimum diş sayısıdır.
Daha önce verilen ifadelerden 200n için
Tablo 15 Alt Kesilme İçin Minimum Diş Sayısı
0 0 13 20 23 30 32 35 40 45 47
minhz 14 13 12 11 10 9 8 7 6 5
değerleri bulunur.
Helisel dişlilerde dişlilerin eğimlerinden dolayı birbirine teması şekilde gösterildiği gibi,
alın düzleminde atlama denilen 0at tg.bS değeri kadar büyür. Bu nedenle helisel
dişlilerde kavrama oranı, düz dişlilere göre
n
0
0n
0
0a
0
atm.
sin.b
t
sin.b
t
tg.b
değerindeki atlama oranı kadar daha büyüktür.

73
Böylece helisel dişli çarklarda toplam kavrama oranı
attop
şeklinde ifade edilir. Burada düz dişliler için geçerli olan kavrama oranı ifadesinde 0
yerine 0a değeri kullanılarak hesaplanan kavrama oranıdır.
Şekil 42 Helisel Dişli Yüzey Ölçüleri
Kavrama oranının daha büyük olması, helisel dişli mekanizmaların düz dişli
mekanizmalarına göre aynı şartlar altında daha sessiz çalışmasını ve aynı malzeme ve
boyutlar için yük taşıma kabiliyetinin artmasını sağlar.
3.1.8.2 Helisel Dişlilerin Yük Taşıma Kabiliyeti
3.1.8.2.1 Diş Kuvveti
Düz dişlilerde diş kuvveti olarak tarif edilen nF kuvveti, helisel dişlilerde normal kesit
içinde olup, kavrama doğrusu üzerindedir. Bu kesitteki nF kuvvetinin, teğetsel
/
tF ve
radyal rF bileşenleri
0
/cos. nnt FF
0n
/
t0nnr tg.Fsin.FF
şeklinde ifade edilir. Teğet düzlemdeki /
tF kuvveti
00nn0
/
tt cos.cos.Fcos.FF

74
00nn0
/
ta sin.cos.Fsin.FF
değerlerinde teğetsel ve eksenel bileşenlere ayrılırsa; nF kuvvetinin teğetsel ( tF ), radyal (
rF ) ve eksenel ( aF ) olmak üzere üç bileşeni vardır.
Teğetsel kuvvetin n.d.
N60
d
M2F
00
dt
ifadesinden hesaplandığı düşünülürse, bu kuvvete
bağlı olarak radyal kuvvet 0
0ntr
cos
tgFF
ve eksenel kuvvet 0ta tg.FF olarak bulunur.
Burada N [ Watt ], 0d [ m.] ve n
dak
dev şeklindedir.
Diş kuvveti ise 00n
t
ncos.cos
FF
’dır.
Şekil 43 Helisel Dişliye Uygulanan Kuvvetler

75
Buna göre helisel dişli mekanizmalarda düz dişlilerden farklı olarak bir eksenel kuvvet
meydana gelmektedir ve bu kuvvet 0 açısı ile orantılıdır. Helisel dişlilerde de düz
dişlilerde olduğu gibi dişlilerin mukavemet ve yüzey basıncı hesabında
nm0nc F.K.K.KF ve tm0tc F.K.K.KF
değerleri kullanılır.
3.1.8.2.2 Mukavemet Hesabı
Normal kesit esas alınırsa helisel dişli çarkların mukavemet denklemleri kontrol hesabı için
SK.K.K.K
m.b
F*
Dm01f
n
t
1
SK.K.K.K
m.b
F*
Dm02f
n
t
2
şeklinde yazılır. Bu ifadelerden 1 ’de;
nm mb . , 0
1n01
cos
z.md
,
01
1dt
d
M2F ve
S
*
Dem
değerleri yazılırsa, boyutlandırma için
3m01f0
em1m
1d
n K.K.K.K.cos.z.
M2m
veya 01d d.b değeri ile
3 m01f0
2
em
2
1m
1d
n K.K.K.K.cos.z.
M2m
ifadeleri elde edilir. Bu denklemlerdeki faktörler düz dişli çarklarda olduğu şekilde
bulunur.

76
3.1.8.3 Helisel Dişlilerde Eksenel Kuvvetler
Şekil 44 Helisel Dişlilerde Eksenel Kuvvetler
Yataklara gelen eksenel kuvvet tek bir yatak tarafından alınır. Aynı mil üzerinde iki helisel
dişli çark bulunduğu zaman, bu dişlilerin diş yönleri o şekilde olmalıdır ki eksenel
kuvvetler aksi yönde tesir etsin. Bunun için her iki dişlinin diş yönleri aynı alınmalıdır.
Büyük momentlerin iletilmesinde eksenel kuvvetlerin etkisini yok etmek için ok veya çift
helisli dişli çarklar kullanılır. Bu dişliler, biri sağ ve diğeri sol olmak üzere aynı eğimde iki
helisel çarktan meydana geldiğinden eksenel kuvvetler birbirini dengeler. Bu nedenle eğim
açısı oldukça büyük, örneğin 450 ’ye kadar alınabilir. Bu dişli çarkların hesabı, her iki
dişliye 2
Ft kuvvetinin geldiği kabul edilerek basit helisel dişlilerdeki gibi yapılır.
Diş sayılarının minh/zz olduğu dişlilerde alttan kesilmeyi önlemek için burada da profil
kaydırma yöntemi uygulanır. Profil kaydırma faktörü
min
eminh/
z
zzx
ifadesi ile verilir.
200n için bu bağıntı

77
17
cos
z14
17
z14x
0
3
e
şeklini alır. Tarif edilen bu profil kaydırma faktörü normal kesite karşılık gelir ve profil
kaydırma miktarı nm.x olur. Alın kesitindeki profil kaydırma faktörü ax ile ifade
edilirse alın kesitine karşılık gelen profil kaydırma miktarı aa m.x olur. Her iki profil
kaydırma miktarının birbirine eşit olması gerektiğinden;
0
0
n
n
a
na
aan
cos.x
cos
m
mx
m
mxx
m.xm.x

78
4 HESAPLAMALAR
4.1 VİTES ORANLARININ BELİRLENMESİ En düşük vites oranı, genellikle yolcu taşıtları için, ilk harekete geçiş sağlanırken aracın
%33’lük bir eğimi tırmanabilmesini sağlayacak şekilde seçilmelidir. Buna ek olarak en
düşük vitesin oranının seçiminde dikkat edilmesi gereken bir diğer husus da aracın tipik bir
yol yüzeyinde maksimum eğimi tekerleklerde kaymaya neden olmayacak bir ilk vites
oranının seçilmesidir. Böylece, en düşük vitesin oranın aşağıdaki yönteme göre
hesaplanmalıdır.
Burada Memax maksimum motor torku, W taşıt ağırlığı, fr yuvarlanma direnç katsayısı, ξax
son dişli oranı, r tork altındaki tekerin efektif yarıçapı olup, 𝜂t ise aktarma verimidir.
4.1.1 Efektif Tork Yarıçapının Hesaplanması
Efektif tork yarıçapı,
2w
NRDr K NSW
Burada NRD, nominal jant çapı, NSW teker genişliği olup, ise çehre oranıdır.
145/70 R13 ölçülerine sahip bir lastiğin efektif tork yarıçapı rw=0,256m olarak hesaplanır.
Yuvarlanma direnç katsayısı fr=0.015
Aktarma verimi trη =0.88
Taşıt Ağırlığı W=850kg (yüklü)
Θmax=18.3 derece (%33’lük eğim)
axξ =3.73 (son dişli oranı)
Me=72 N.m (Maksimum motor torku)
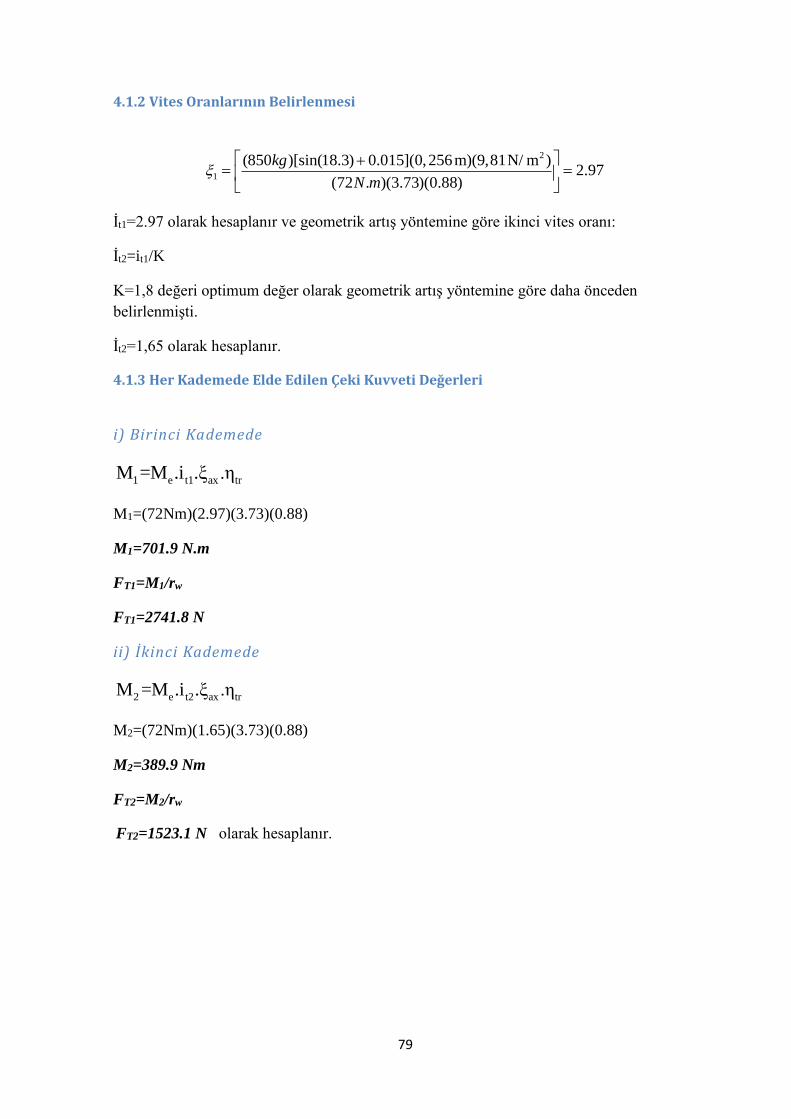
79
4.1.2 Vites Oranlarının Belirlenmesi
2
1
(850 )[sin(18.3) 0.015](0,256m)(9,81N/ m )2.97
(72 . )(3.73)(0.88)
kg
N m
İt1=2.97 olarak hesaplanır ve geometrik artış yöntemine göre ikinci vites oranı:
İt2=it1/K
K=1,8 değeri optimum değer olarak geometrik artış yöntemine göre daha önceden
belirlenmişti.
İt2=1,65 olarak hesaplanır.
4.1.3 Her Kademede Elde Edilen Çeki Kuvveti Değerleri
i) Birinci Kademede
1 e t1 ax trM =M .i .ξ .η
M1=(72Nm)(2.97)(3.73)(0.88)
M1=701.9 N.m
FT1=M1/rw
FT1=2741.8 N
ii) İkinci Kademede
2 e t2 ax trM =M .i .ξ .η
M2=(72Nm)(1.65)(3.73)(0.88)
M2=389.9 Nm
FT2=M2/rw
FT2=1523.1 N olarak hesaplanır.

80
4.2 DİŞLİ HESABI
4.2.1 Boyutlandırma Hesabı
1 Dişli Hesaplamaları
𝑧𝑚𝑖𝑛 =2
𝑠𝑖𝑛2𝛼𝑛0 , 𝛼𝑛0 = 20
𝑧𝑚𝑖𝑛 =2
𝑠𝑖𝑛220= 17 𝑒𝑛 𝑎𝑧 𝑔𝑒𝑟𝑒𝑘𝑒𝑛 𝑑𝑖ş𝑙𝑖 𝑠𝑎𝑦𝚤𝑠𝚤
𝑧1 = 30 𝑠𝑒ç𝑖𝑙𝑖𝑟
𝛽0 = 30𝑜 𝑠𝑒ç𝑖𝑙𝑖𝑟
Tablo 3 den
𝜓𝑑 =𝑏
𝑑𝑜1= 0.25 … 0.8
𝜓𝑑 = 0.6 𝑠𝑒ç𝑖𝑙𝑖𝑟.
Tablo 4 den
𝐾𝑣 = 1.2 𝑠𝑒ç𝑖𝑙𝑖𝑟.
Tablo 5 den
𝐾𝑚 = 1.32
Tablo 6 dan
𝐾𝑜 = 1.25 𝑠𝑒ç𝑖𝑙𝑖𝑟.
Figure 1 den
𝑘𝑓1 = 2.6 𝑠𝑒ç𝑖𝑙𝑖𝑟.
𝑀𝑛 ≥ √2. 𝑀𝑑𝑜1
𝜓𝑑. 𝑧12. 𝜎𝑒𝑚
. 𝑐𝑜𝑠𝛽0. 𝑘𝑓1. 𝐾𝑜 . 𝐾𝑣. 𝐾𝑚
3
𝑀𝑛 𝑏𝑢𝑙𝑢𝑛𝑎𝑏𝑖𝑙𝑚𝑒𝑠𝑖 𝑖ç𝑖𝑛 𝜏𝑒𝑚 𝑏𝑢𝑙𝑢𝑛𝑚𝑎𝑙𝚤𝑑𝚤𝑟.
𝜎𝑒𝑚 =𝜏𝐷
∗
𝑠

81
𝜎𝐷∗ =
𝐾𝑦. 𝐾𝑏
𝐾ç. 𝐾𝑅 . 𝐾𝐿 . 𝐾𝑍. 𝜏𝐷
St 70 seçilir.
𝜎𝑘 = 70𝑥10 = 700𝑁/𝑚𝑚2
𝜎𝐷 = 700𝑥0.5 = 350 𝑁/𝑚𝑚2
𝑘𝑏 = 1 (𝑇𝑎𝑏𝑙𝑜 9 𝑑𝑎𝑛)
𝑘𝑦 =0.6 (Figure 3 den) 𝜏𝑘 𝑦𝑎 𝑔ö𝑟𝑒 𝑠𝑒ç𝑖𝑙𝑖𝑟.
𝑘ç = 1 + 𝑞(𝑘𝑡 − 1)
𝑞 = 0.8 ( ç𝑒𝑛𝑡𝑖𝑘 𝑦𝑎𝑟𝚤ç𝑎𝑝𝚤 2𝑚𝑚 𝑣𝑒 𝜏𝑘 𝑑𝑒ğ𝑒𝑟𝑖 𝑖ç𝑖𝑛)
𝑧 = 30 𝑣𝑒 𝑥 = 0 𝑖ç𝑖𝑛 (𝐹𝑖𝑔𝑢𝑟𝑒 5 𝑑𝑒𝑛)
𝑟
𝑏=
𝑃𝑡𝑚𝑖𝑛
𝑗. 𝑡=
0.413𝑥𝑚
0.5𝑥П𝑥𝑚=
0.415
0.5𝑥П= 0.26
𝑘𝑡 = 1.4 𝑜𝑙𝑎𝑟𝑎𝑘 𝑡𝑎𝑦𝑖𝑛 𝑒𝑑𝑖𝑙𝑖𝑟.
𝑘ç = 1 + 0.8 (1.4 − 1)
𝑘ç = 1.32
𝑘𝐿 = 1 (𝑇𝑎𝑏𝑙𝑜 10 𝑑𝑎𝑛)
𝑘𝑅 = 0.868 ( 𝑇𝑎𝑏𝑙𝑜 11 𝑑𝑒𝑛 )(𝑅 = 95 𝑖ç𝑖𝑛)
𝑘𝑧 = 1.4 𝑠𝑒ç𝑖𝑙𝑖𝑟. ( 𝑇𝑎𝑏𝑙𝑜 12 𝑑𝑒𝑛 )
𝜎𝐷∗ =
0.6 𝑥 1
1.32𝑥 0.868 𝑥 1 𝑥 1.4 𝑥 350
𝜎𝐷∗ = 193.3 𝑁/𝑚𝑚2
𝜎𝑒𝑚 =𝜏𝐷
∗
𝑠 𝑠 = 2 𝑖ç𝑖𝑛
𝜎𝑒𝑚 =193.3
2= 96.65 𝑁/𝑚𝑚2
𝑀𝑛 = √2 𝑥 72 𝑥 103 𝑥 𝑐𝑜𝑠20 𝑥 2.6 𝑥 1.25 𝑥 1.2 𝑥 1.32
0.6 𝑥 302 𝑥 96.65
3
𝑀𝑛 = 2.36 𝑚𝑚 ≅ 2.5𝑚𝑚(𝑜𝑙𝑎𝑟𝑎𝑘 𝑠𝑒ç𝑖𝑙𝑖𝑟)

82
𝑑𝑜1 𝑡𝑎𝑘𝑠𝑖𝑚𝑎𝑡 𝑑𝑎𝑖𝑟𝑒𝑠𝑖 ç𝑎𝑝𝚤
𝑑𝑜1 =𝑀𝑛 𝑥 𝑧1
𝑐𝑜𝑠𝛽0
𝑑𝑜1 =2.5 𝑥 30
𝑐𝑜𝑠30= 86.6 𝑚𝑚
𝐹𝑡 𝑡𝑒ğ𝑒𝑡𝑠𝑒𝑙 𝑘𝑢𝑣𝑣𝑒𝑡
𝐹𝑡1 = 2 𝑥 𝑀𝑑1
𝑑𝑜1
𝐹𝑡1 = 2 𝑥 72
86.6 𝑥 10−3= 1.66 𝑘𝑁
𝐹𝑟 𝑅𝑎𝑑𝑦𝑎𝑙 𝐾𝑢𝑣𝑣𝑒𝑡
𝐹𝑟 = 𝐹𝑡 .𝑡𝑎𝑛𝛼𝑛𝑜
𝑐𝑜𝑠𝛽𝑜
𝐹𝑟 = 1.66 𝑥 𝑡𝑎𝑛20
𝑐𝑜𝑠30= 0.70 𝑘𝑁
𝐹𝑎 = 𝐹𝑡. 𝑡𝑎𝑛𝛽0
𝐹𝑎 = 1.66 𝑥 𝑡𝑎𝑛30
𝐹𝑎 = 0.95 𝑘𝑁
2. Dişli Hesaplamaları
𝑀𝑛1 = 𝑀𝑛2
𝑧2
𝑧1= 𝑖𝑡1
𝑧2
30= 2.97
𝑧2 = 89
𝑑𝑜2 = 86.6 𝑥 2.97 = 257.2𝑚𝑚
𝐹𝑡2 =2 𝑥 104
257.2 𝑥 10−3= 1.46 𝑘𝑁 ( 𝑉𝑒𝑟𝑖𝑚𝑑𝑒𝑛 𝑑𝑜𝑙𝑎𝑦𝚤 𝑏𝑖𝑟 𝑘𝑎𝑦𝚤𝑝 𝑜𝑙𝑢ş𝑢𝑟) 𝜂𝑡 = 0.88
𝐹𝑟2 = 1.46 𝑥 𝑡𝑎𝑛20
𝑐𝑜𝑠30= 0.79 𝑘𝑁
𝐹𝑎2 = 1.46 𝑥 𝑡𝑎𝑛30 = 0.84 𝑘𝑁

83
3. Dişli Hesaplamaları
𝑟3 + 𝑟𝑎 = 165𝑚𝑚 𝑒𝑘𝑠𝑒𝑛𝑙𝑒𝑟 𝑎𝑟𝑎𝑠𝚤 𝑚𝑒𝑠𝑎𝑓𝑒
𝐸𝑘𝑠𝑒𝑛𝑙𝑒𝑟 𝑎𝑟𝑎𝑠𝚤 𝑚𝑒𝑠𝑎𝑓𝑒 𝑎𝑦𝑛𝚤 𝑜𝑙𝑚𝑎𝑠𝚤 𝑖ç𝑖𝑛;
𝑟4
𝑟3= 1.65 𝑟3 = 62.3 𝑚𝑚 𝑟4 = 102.7 𝑚𝑚
𝐹𝑡3 =2 𝑥 72
62.3 𝑥 2= 1.16 𝑘𝑁
𝐹𝑟3 =𝑡𝑎𝑛20
𝑐𝑜𝑠30 𝑥 1.16 = 0.49𝑘𝑁
𝐹𝑎3 = 1.16 𝑥 𝑡𝑎𝑛30 = 0.67 𝑘𝑁
𝑏3 = 𝜓𝑑 . 𝑑𝑜3
𝑏3 = 0.6 𝑥 124.6
𝑏3 = 74.8 𝑚𝑚
4. Dişli Hesaplamaları
𝐹𝑡4 = 𝐹𝑡3. 𝜂 = 1.16 𝑥 0.88 = 1 𝑘𝑁
𝐹𝑟4 = 𝐹𝑟3. 𝜂 = 0.49 𝑥 0.88 = 0.43 𝑘𝑁
𝐹𝑎4 = 𝐹𝑎3. 𝜂 = 0.67 𝑥 0.88 = 0.59 𝑘𝑁
𝑏4 = 𝜓𝑑 . 𝑑𝑜4
𝑏4 = 0.6 𝑥 205.4
𝑏4 = 123.2 𝑚𝑚
𝑏4 > 𝑏3 𝑜𝑙𝑑𝑢ğ𝑢𝑛𝑑𝑎𝑛 𝑏3 𝑑𝑒ğ𝑒𝑟𝑖 𝑏4 𝑜𝑙𝑎𝑟𝑎𝑘 𝑎𝑙𝚤𝑛𝚤𝑟. İ𝑙𝑘 𝑠𝑒ç𝑖𝑙𝑒𝑛 𝑏3 𝑑𝑒ğ𝑒𝑟𝑖 𝑖ç𝑖𝑛 𝑒𝑚𝑛𝑖𝑦𝑒𝑡𝑙𝑖
𝑜𝑙𝑑𝑢ğ𝑢𝑛𝑑𝑎𝑛 2. 𝑑𝑒ğ𝑒𝑟 𝑖ç𝑖𝑛𝑑𝑒 𝑒𝑚𝑛𝑖𝑦𝑒𝑡𝑙𝑖𝑑𝑖𝑟.

84
4.2.2 Mukavemet Hesapları
1. Dişli Hesapları
𝜏1 =𝐹𝑡
𝑏 𝑥 𝑀𝑛. 𝑘𝑓1. 𝑘𝑜 . 𝑘𝑣. 𝑘𝑚 ≤
𝜎𝐷∗
𝑠
𝑏1 = 𝜓𝑑 . 𝑑𝑜1
𝑏1 = 0.6 𝑥 83.1 = 50 𝑚𝑚
𝜎1 =1.66 𝑥 103
50 𝑥 2.4 𝑥 2.6 𝑥 1.25 𝑥 1.2 𝑥 1.32
𝜎1 = 71.2 ≤ 96.65 𝑒𝑚𝑛𝑖𝑦𝑒𝑡𝑙𝑖𝑑𝑖𝑟.
2.Dişli Hesapları
𝑏2 = 𝜓𝑑 . 𝑑𝑜2
𝑏2 = 0.6 𝑥 257.2 = 155 𝑚𝑚
𝜎2 =1.46 𝑥 103
155 𝑥 2.4𝑥 2.6 𝑥 1.25 𝑥 1.2 𝑥 1.32 ≤
𝜎𝐷∗
𝑠
𝜎2 = 20 ≤ 96.65 𝐸𝑚𝑛𝑖𝑦𝑒𝑡𝑙𝑖.
𝑏2 > 𝑏1 𝑜𝑙𝑑𝑢ğ𝑢𝑛𝑑𝑎𝑛 𝑏1 𝑑𝑒ğ𝑒𝑟𝑖 𝑏2 𝑜𝑙𝑎𝑟𝑎𝑘 𝑎𝑙𝚤𝑛𝚤𝑟. İ𝑙𝑘 𝑠𝑒ç𝑖𝑙𝑒𝑛 𝑏1 𝑑𝑒ğ𝑒𝑟𝑖 𝑖ç𝑖𝑛 𝑒𝑚𝑛𝑖𝑦𝑒𝑡𝑙𝑖
𝑜𝑙𝑑𝑢ğ𝑢𝑛𝑑𝑎𝑛 2. 𝑑𝑒ğ𝑒𝑟 𝑖ç𝑖𝑛𝑑𝑒 𝑒𝑚𝑛𝑖𝑦𝑒𝑡𝑙𝑖𝑑𝑖𝑟.
3. 𝑑𝑖ş𝑙𝑖 𝑣𝑒 4. 𝑑𝑖ş𝑙𝑖 𝑖ç𝑖𝑛 𝑒𝑘𝑠𝑒𝑛𝑙𝑒𝑟 𝑎𝑟𝑎𝑠𝚤 𝑚𝑒𝑠𝑎𝑓𝑒 𝑎𝑦𝑛𝚤 𝑜𝑙𝑚𝑎𝑠𝚤 𝑔𝑒𝑟𝑒𝑘𝑡𝑖ğ𝑖𝑛𝑑𝑒𝑛 𝑑𝑜𝑙𝑎𝑦𝚤
𝑏𝑜𝑦𝑢𝑡𝑙𝑎𝑛𝑑𝚤𝑟𝚤𝑙𝑚𝚤ş𝑡𝚤𝑟. 𝐵𝑢 𝑘𝚤𝑠𝚤𝑚𝑑𝑎 ′𝑏 𝑣𝑒 𝑀𝑛′𝑑𝑒ğ𝑒𝑟𝑙𝑒𝑟𝑖 𝑏𝑜𝑦𝑢𝑡𝑙𝑎𝑛𝑑𝚤𝑟𝚤𝑙𝑎𝑐𝑎𝑘𝑡𝚤𝑟.
𝜎4 =𝐹𝑡4
𝑏 𝑥 𝑀𝑛 𝑥 𝑘𝑓1 𝑥 𝑘𝑜 𝑥 𝑘𝑣 𝑥 𝑘𝑚 ≤
𝜎𝐷∗
𝑠

85
1 𝑥 103
74.8 𝑥 𝑀𝑛3 𝑥 2.6 𝑥 1.25 𝑥 1.2 𝑥 1.32 ≤ 96.65
𝑀𝑛4 = 0.72 𝑚𝑚
𝑀𝑛 = 0.72 𝑑𝑒ğ𝑒𝑟𝑖𝑛𝑑𝑒𝑛 𝑏ü𝑦ü𝑘 𝑠𝑒ç𝑖𝑙𝑒𝑛 ℎ𝑒𝑟 𝑑𝑒ğ𝑒𝑟 𝑖ç𝑖𝑛 𝑒𝑚𝑛𝑖𝑦𝑒𝑡𝑙𝑖𝑑𝑖𝑟. 𝑀𝑛3 = 𝑀4
𝑀𝑛3 = 1 𝑚𝑚 𝑜𝑙𝑎𝑟𝑎𝑘 𝑎𝑙𝚤𝑛𝚤𝑟.
4.3 DİŞLİ ÖLÇÜLERİ
Tablo 16 Hesaplanan Dişli Ölçüleri
Semboller 1 2 3 4
Diş Başı Yüksekliği bh [mm] 2,50 2,50 1,00 1,00
Taban Yüksekliği th [mm] 3,13 3,13 1,25 1,25
Diş Yüksekliği h[mm] 5,63 5,63 2,25 2,25
Taksimat (Adım) t 7,85 7,85 3,14 3,14
Diş Kalınlığı 0S [mm] 3,93 3,93 1,57 1,57
Diş Boşluğu 0 [mm] 3,93 3,93 1,57 1,57
Diş Genişliği b[mm] 155,00 155,00 74,80 123,20
Taksimat Dairesi Çapı d0[mm] 86,60 257,20 124,60 205,40
Diş Başı Dairesi Çapı db[mm] 91,60 262,20 126,60 207,40
Taban Dairesi Çapı dt[mm] 92,85 263,45 127,10 207,90
Temel Dairesi Çapı dg 81,38 222,90 117,09 193,01

86
5. KAYNAKÇA

87
6. TEKNİK RESİMLER VE EKLER







