talk at kuz xiii
DESCRIPTION
Research Presentation at conference "Kognicia & Umely zivot XIII" (in Slovak) http://cogsci.fmph.uniba.sk/kuz2013/TRANSCRIPT

Motivácia a náš model MNSAlgoritmus BAL
Experimenty a výsledky
Robotický model systému zrkadliacich neurónovKognícia a umelý život XIII
Kristína Rebrová a Igor Farkaš[email protected]
Centrum pre kognitívnu vedu FMFI UKCognition and Neural Computation Group
http://cogsci.fmph.uniba.sk/cnc
Kristína Rebrová a Igor Farkaš Robotický model systému zrkadliacich neurónov

Motivácia a náš model MNSAlgoritmus BAL
Experimenty a výsledky
Prehľad
1 Motivácia a náš model MNS
2 Algoritmus BAL
3 Experimenty a výsledky
Kristína Rebrová a Igor Farkaš Robotický model systému zrkadliacich neurónov

Motivácia a náš model MNSAlgoritmus BAL
Experimenty a výsledky
Senzomotorická kognícia
Porozumenie na základe prepojenia akcie a percepcie -párovanie pozorovanej akcie a vlastného motorickéhorepertoáraSystém zrkadliacich neurónov (mirror neuron system, MNS)(Pellegrino a kol., 1992; Rizzolatti a kol. 2001; Rizzolatti a Sinigaglia, 2010)
Obojsmerný tok informácie medzi vizuálnymi a motorickýmioblasťami (Tessitore a kol,2010)
Kristína Rebrová a Igor Farkaš Robotický model systému zrkadliacich neurónov

Motivácia a náš model MNSAlgoritmus BAL
Experimenty a výsledky
Variantné a invariantné neuróny
Horná spánková brázda (superior temporal sulcus, STS)STS poskytuje vstupy pre zrkadliace neurónyRôzne typy neurónov, variantné a invariantné neuróny (Perret a
kol, 1991)
Invariantné n. anatomicky najbližšie k frontálnej časti kôry –najvyššia úroveň reprezentácie (Jellema a Perret, 2006)
Variantné a invariantné vlastnosti objavené aj u zrkadliacichneurónov v F5 (Caggiano a kol, 2009)
Kristína Rebrová a Igor Farkaš Robotický model systému zrkadliacich neurónov
Motivácia a náš model MNSAlgoritmus BAL
Experimenty a výsledky
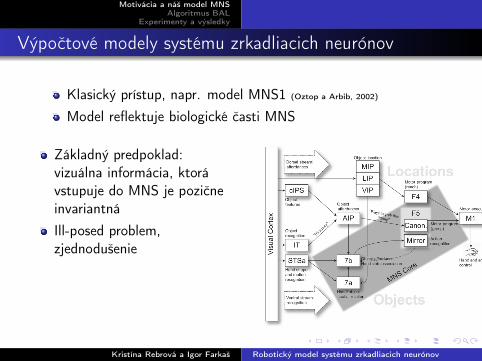
Výpočtové modely systému zrkadliacich neurónov
Klasický prístup, napr. model MNS1 (Oztop a Arbib, 2002)
Model reflektuje biologické časti MNS
Základný predpoklad:vizuálna informácia, ktorávstupuje do MNS je pozičneinvariantnáIll-posed problem,zjednodušenie
Kristína Rebrová a Igor Farkaš Robotický model systému zrkadliacich neurónov

Motivácia a náš model MNSAlgoritmus BAL
Experimenty a výsledky
Robotický model systému zrkadliacich neurónov
Interakcia medzi MN a STS (Tessitore a kol., 2012)
Modulárna architektúra, na najvyššej úrovni dochádza krozpoznaniu a porozumeniu akciiRobot iCub sa učí uchopovať predmety 3 spôsobmi
1 Základná senzomotorika: spojité učenieposilňovaním (CACLA, van Hasselt, 2007)
2 Vyššie oblasti F5 a STS: samoorg.mapa MSOM (Strickert a Hamker, 2005)
3 Prepojenie F5 a STS: binarizáciapomocou k-WTA a náš model BAL
STSvizuálna
reprezentáciaPF
F5zkradliaceneuróny
motorický modulpredspracovanie
vizuálnej informácie
Kristína Rebrová a Igor Farkaš Robotický model systému zrkadliacich neurónov
Motivácia a náš model MNSAlgoritmus BAL
Experimenty a výsledky
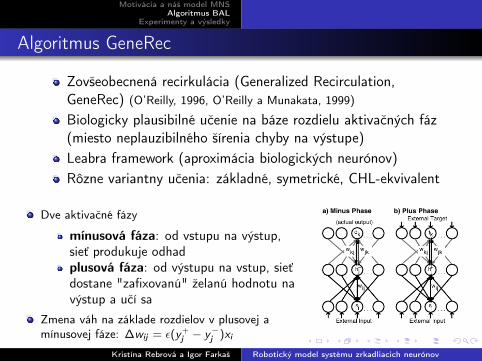
Algoritmus GeneRec
Zovšeobecnená recirkulácia (Generalized Recirculation,GeneRec) (O’Reilly, 1996, O’Reilly a Munakata, 1999)
Biologicky plausibilné učenie na báze rozdielu aktivačných fáz(miesto neplauzibilného šírenia chyby na výstupe)Leabra framework (aproximácia biologických neurónov)Rôzne variantny učenia: základné, symetrické, CHL-ekvivalent
Dve aktivačné fázy
mínusová fáza: od vstupu na výstup,sieť produkuje odhadplusová fáza: od výstupu na vstup, sieťdostane "zafixovanú" želanú hodnotu navýstup a učí sa
Zmena váh na základe rozdielov v plusovej amínusovej fáze: ∆wij = ε(y+
j − y−j )xi
Kristína Rebrová a Igor Farkaš Robotický model systému zrkadliacich neurónov
Motivácia a náš model MNSAlgoritmus BAL
Experimenty a výsledky
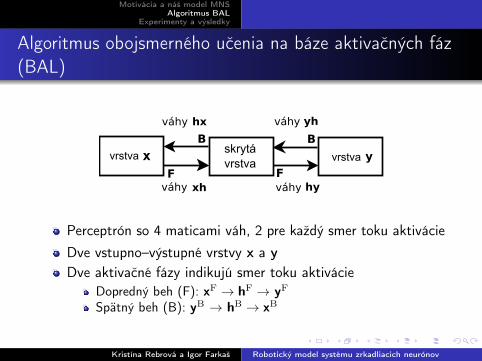
Algoritmus obojsmerného učenia na báze aktivačných fáz(BAL)
F F
B B
vrstva x yskrytávrstva
xh hy
váhy hx yhváhy
váhy váhy
vrstva
Perceptrón so 4 maticami váh, 2 pre každý smer toku aktivácieDve vstupno–výstupné vrstvy x a yDve aktivačné fázy indikujú smer toku aktivácie
Dopredný beh (F): xF → hF → yF
Spätný beh (B): yB → hB → xB
Kristína Rebrová a Igor Farkaš Robotický model systému zrkadliacich neurónov
Motivácia a náš model MNSAlgoritmus BAL
Experimenty a výsledky
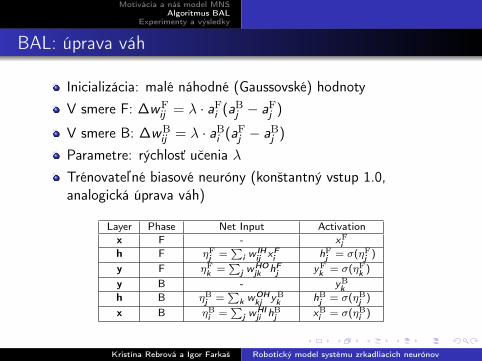
BAL: úprava váh
Inicializácia: malé náhodné (Gaussovské) hodnotyV smere F: ∆wF
ij = λ · aFi (aB
j − aFj )
V smere B: ∆wBij = λ · aB
i (aFj − aB
j )
Parametre: rýchlosť učenia λTrénovateľné biasové neuróny (konštantný vstup 1.0,analogická úprava váh)
Layer Phase Net Input Activationx F - xF
ih F ηF
j =∑
i w IHij xF
i hFj = σ(ηF
j )
y F ηFk =
∑j wHO
jk hFj yF
k = σ(ηFk )
y B - yBk
h B ηBj =
∑k wOH
kj yBk hB
j = σ(ηBj )
x B ηBi =
∑j wHI
ji hBj xB
i = σ(ηBi )
Kristína Rebrová a Igor Farkaš Robotický model systému zrkadliacich neurónov

Motivácia a náš model MNSAlgoritmus BAL
Experimenty a výsledky
GeneRec verzus BAL
Jednosmerné mapovanieDynamické neurónyČiastočné obojsmerné šírenieaktivácie
Obojsmerná asociáciaŠtandardné neurónyKompletne obojsmernéšírenie aktivácie
Kristína Rebrová a Igor Farkaš Robotický model systému zrkadliacich neurónov

Motivácia a náš model MNSAlgoritmus BAL
Experimenty a výsledky
Kódovač 4-2-4 – parametre
nie vždy skonverguje k 100% úspešnosti (úspešnosť podľarýchlosti učenia)porovnanie s pôvodným GeneRec modelom:
konvergencia: BAL 65% vs. GeneRec 90% (základný), 56%symetrická a CHL verziapočet epoch: 100 až tisíce (GeneRec konverguje rýchlejšie)
0 1 2 3
0
20
40
60
rýchlosť učenia
úspe
šné
siet
e
2 2.1 2.20
20
40
0 1 2 3
0
1,000
2,000
3,000
rýchlosť učenia
epoc
hy
2 2.1 2.20
500
1,000
1,500
0 1,000 2,000 3,000 4,000 5,000
0
0.5
1
epocha
úspe
šnos
ťsi
ete
vzoryF
vzoryB
bityF
bityB
mseF
mseB
Kristína Rebrová a Igor Farkaš Robotický model systému zrkadliacich neurónov

Motivácia a náš model MNSAlgoritmus BAL
Experimenty a výsledky
Párovanie riedkych binárnych vzorov
Motivácia pre typ dát: riedke reprezentácie v mozgu100 párov vzorov, 144 bitov, k = 12 pozitívnychOptimálna λ = 0.2, optimálna nH = 120 (vplýva viacmenej lenna dĺžku trénovania)Aktivácie na skrytej vrstve: blížia sa k sebe a nebinarizujú sa(hodnoty okolo 0.5)
0.1 0.2 0.3 0.4 0.5
0
0.5
1
rýchlosť učenia
úspeš
nosť
siet
e
bityF bityB
vzoryF vzoryB
0.3 0.32 0.34
0
0.5
1
80 100 120 140 160 1800.94
0.96
0.98
1
hidden layer size
úspeš
nosť
siet
e
bityF bityB
vzoryF vzoryB
100 150
1,000
2,000
3,000
epochy
0 500 1,000 1,500 2,000 2,500
0
0.5
1
epocha
úspe
šnos
ťsi
ete
vzoryF
vzoryB
bityF
bityB
mseF
mseB
Kristína Rebrová a Igor Farkaš Robotický model systému zrkadliacich neurónov

Motivácia a náš model MNSAlgoritmus BAL
Experimenty a výsledky
Komplexné asociácie
Motivácia pre typ dát: asociácia 4 perspektív na 1 pohyb16 párov vzorov, 16 bitov, k = 3 pozitívnychOptimálna λ = 1.0, optimálna nH = 14
0 0.5 1 1.2
0
0.5
1
rýchlosť učenia
úspeš
nosť
siet
e
bityF bityB
vzoryF vzoryB
10 15 20 25
0
0.5
1
veľkosť skrytej vrstvy
úspeš
nosť
siet
e
vzoryF vzoryB
bityF bityB
0 200 400 600 800 1,000
0
0.5
1
epocha
úspe
šnos
ťsi
ete
bityF
bityB
vzoryF
vzoryB
mseF
mseB
Kristína Rebrová a Igor Farkaš Robotický model systému zrkadliacich neurónov
Motivácia a náš model MNSAlgoritmus BAL
Experimenty a výsledky
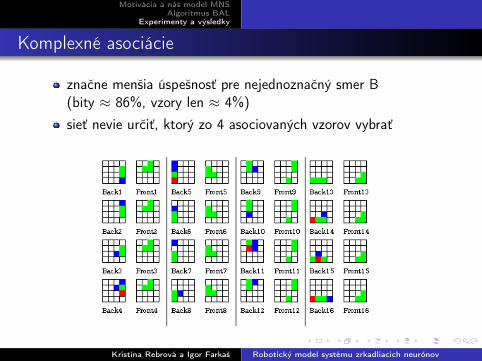
Komplexné asociácie
značne menšia úspešnosť pre nejednoznačný smer B(bity ≈ 86%, vzory len ≈ 4%)sieť nevie určiť, ktorý zo 4 asociovaných vzorov vybrať
Kristína Rebrová a Igor Farkaš Robotický model systému zrkadliacich neurónov

Motivácia a náš model MNSAlgoritmus BAL
Experimenty a výsledky
Robotický MNS model
Najvyššia úroveň: mapovaniereprezentácií na STS a F5Výstupy z MSOM sú zbinarizovanépomocou k-WTAVizuálne dáta: 14×14 s kv = 16Motorické dáta: 12×12 s km = 8Experimenty s prvou perspektívou,52 párov vzorov
STSvizuálna
reprezentáciaPF
F5zkradliaceneuróny
motorický modulpredspracovanie
vizuálnej informácie
Kristína Rebrová a Igor Farkaš Robotický model systému zrkadliacich neurónov

Motivácia a náš model MNSAlgoritmus BAL
Experimenty a výsledky
Robotický MNS model
Optimálna λ = 0.2, optimálna nH = 170Malá úspešnosť – nejednoznačné asociácie asociácie m:nChyby v rámci jednej kategórie pohybu, nie medzikategóriami
0 500 1,000 1,500
0
0.5
1
epocha
úspe
šnos
ť
bitSuccF bitSuccB
vzoryF vzoryB
0 500 1,000 1,500
0
5 · 10−2
0.1
epocha
mse
/vzd
iale
nosť
mseF mseB
pattDistF pattDistB
Kristína Rebrová a Igor Farkaš Robotický model systému zrkadliacich neurónov

Motivácia a náš model MNSAlgoritmus BAL
Experimenty a výsledky
Robotický MNS model – príklad reprodukcie vzorov
Kristína Rebrová a Igor Farkaš Robotický model systému zrkadliacich neurónov

Motivácia a náš model MNSAlgoritmus BAL
Experimenty a výsledky
Zhrnutie
obojsmerné učenie vplýva na konvergenciu BALemergujúce reprezentácie na skrytej vrstve nemajú tendenciubinarizovať sa (nevznikajú interné reprezentácie)úspešnosť na robotických dátach v našom MNS modeli jenízka (nejednoznačné asociácie m-n)chyby na robotických dátach sa vyskyujú v rámci kategórie niemedzi kategóriami
Kristína Rebrová a Igor Farkaš Robotický model systému zrkadliacich neurónov
Motivácia a náš model MNSAlgoritmus BAL
Experimenty a výsledky
Ďalší postup pri skúmaní BAL a modelovaní MNS
Algoritmus BALskúmať konvergenciu algoritmu, jeho citlivosť na rýchlosťučenia a charakter obojsmerého prepojeniaskúmať reprezentácie na skrytej vrstve a tiež možnosti akoovplyvniť vznik reprezentácií aj na tejto vrstve (v kontextesystému zrkadliacich neurónov)
Robotický model MNSzaviezť do modelu ďalšie vizuálne perspektívyvytvoriť priestor/mechanizmus pre vznik variantných ainvariantných reprezentácií v STS a F5
Kristína Rebrová a Igor Farkaš Robotický model systému zrkadliacich neurónov

Motivácia a náš model MNSAlgoritmus BAL
Experimenty a výsledky
Koniec
Ďakujem za pozornosť
Kristína Rebrová[email protected]
Kristína Rebrová a Igor Farkaš Robotický model systému zrkadliacich neurónov