t echnická fy zika pro s trojaře 1
DESCRIPTION
T echnická FY zika pro S trojaře 1. Šimon Kos, KFY Číslo dveří: UF218 Email: simonkos @ kfy.zcu.cz Telefon: 37763 2245 Informace na http://www.kfy.zcu.cz/Pro_studenty/Predmety/TFYS1KS.html Cvičení, praktika—nejsou Zápočet zároveň se zkouškou. Zkouška. - PowerPoint PPT PresentationTRANSCRIPT

Technická FYzika pro Strojaře 1
• Šimon Kos, KFY – Číslo dveří: UF218– Email: [email protected]– Telefon: 37763 2245
• Informace na – http://www.kfy.zcu.cz/Pro_studenty/Predmety/
TFYS1KS.html
• Cvičení, praktika—nejsou • Zápočet zároveň se zkouškou

Zkouška
● Písemná: 5 otázek, každá za max. 2 body
10-9b…1 8-7b…2 6-5b…3
● Možnost ústní zkoušky za max. 2 body
● Hodnocení:

Důležitá role matematiky ve fyzice zdůrazňována…
Galileo: Kniha přírody je napsána jazykem matematiky (1623)
Isaac Newton: Philosophiæ Naturalis Principia Mathematica (1687)
Eugene Wigner: The Unreasonable Effectiveness of Mathematics in the Natural Sciences (1960)
● Fyzikální veličiny mají číselnou hodnotu.
● Vztahy mezi fyzikálními veličinami jsou rovnice.
● Rovnice dávají do souvislosti veličiny a jejich změny v čase a prostoru.
● Změny jsou vyjádřeny derivacemi a rovnice jsou proto diferenciální rovnice(např. 2. Newtonův zákon za chvíli).
…v začátcích:
…i v době moderní fyziky:
Co to znamená:

Fyzikální veličiny
Veličina = číselná hodnota × jednotka; bez jednotky nemá číselná hodnota smysl!
Základní veličiny mechaniky:
Např. m = 5kg nebo 5[kg]
veličina jednotka
délka m
hmotnost kg
čas s
Ostatní veličiny mechaniky jsou z nich odvozené, jak uvidíme v dalším (např. rychlost, síla, moment setrvačnosti).
V dalších částech fyziky potkáme veličiny, které nejsou z těchto odvozené(např. elektrický proud, teplota, látkové množství).

Skaláry, vektory
Skaláry- jen velikost (hmotnost, čas, teplota,…)
Vektory- velikost + směr (poloha, rychlost, zrychlení, síla,…)
Označení: tučně; v psaném textu šipka nad písmenem a
Dělení podle množství informace v dané veličině:
Graficky: šipka
Složky v pravoúhlém souřadném systému
ayx
y
z
a
ax
az
a
Velikost vektoru: |a| nebo též prostě netučné a
a=(ax,ay,az)

Operace s vektory
● Sčítání, odečítání dvou vektorů, násobení vektoru skalárem
● Skalární součin dvou vektorů
● Vektorový součin dvou vektorů
Probereme postupně:

Sčítání, odečítání, násobení skalárem
a
b
a+b
b
ab+a=
Komutativní jako u čísel
a
b
a-b a
-b
a+(-b)=
Sčítání:
Odčítání:
Násobení skalárem:
3b-3b

Skalární součin
a
b
θ
|a| cos θ
Skalární součin definujeme jako a·b=|a||b| cos θ
Ve složkách: a·b=axbx + ayby + azbz
Z jednoho vektoru vezmeme pouze projekci na druhý:
Speciální případ: skalární součin vektoru sama se sebou
a·a= |a||a| cos 0°= |a|2
=ax2+ay
2+az2
Pythagorova věta
…symetrický výraz vůči a↔b…mohli jsme vzít projekci b na a

Vektorový součin
2 vektory v 3-rozměrném prostoru:
Velikost: |C| = |A| |B| sin θ

Podobnosti a rozdíly součinů
● výsledek úměrný velikosti každého z obou vektorů● platí pro ně pravidlo pro derivaci součinu dvou funkcí,
které uvidíme za chvíli
● skalár vs. vektor, ● cos vs. sin
(skalární součin největší pro ║, nulový pro ┴, vektorový naopak)● komutuje vs. antikomutuje,
Stejné:
Různé:

Derivace
0pro
d
d
hx
xf
h
xfhxf
x
xf
= poměr rychlostí změny veličiny f a veličiny x:
x x+h3 x+h2 x+h1
f(x)
f(x+h3)
f(x+h2)
f(x+h1)
xfxfxx
xf
xfxfxx
xf
2
2
2
2
d
d
d
d
d
d
d
dZnačení derivace:
symbolem Δ označujeme malou ale konečnou změnu veličiny
pro první derivaci
pro druhou derivaci atd.

Derivace elementárních funkcí
xxx
xxx
x
rxxx
xx
rr
sincosd
d
cossind
d
eed
d
d
d 1
● Mocnina: (spec. případ: derivace konstanty=0)
● Exponenciála:
● Trigonometrické funkce:

Pravidla pro derivování
xgxgfxgf
xfcxcf
xgxfxgxfxgxf
xgxfxgxf
● Součet:
● Součin: (i skalární nebo vektorový dvou vektorových funkcí)
● Speciálně násobení konstantou:
● Složená funkce:
xgcxfcxgcxfc 2121
● Součet a násobení konstantou dohromady dají linearitu:

Integrál
x
xFxf
d
d
xxfxxfxF dd
xxfb
a
d
Opak: známe rychlost f změny veličiny F…
Obě strany vynásobíme přírůstkem Δx čímž dostaneme přibližně přírůstek ΔF(x).
Toto přiblížení je tím lepší, čím je menší Δx. V limitě Δx→0 dostaneme integrál
Když zadáme meze, dostaneme určitý integrál:
xxfx
xFxxfx
xFd
d
d
dKdyž tyto přírůstky sečteme, dostaneme přibližně samotnou funkci F:
který je určen až na libovolně velkou integrační konstantu.
…a chceme dostat samotnou veličinu F

Geometricky
a b x
f(x)
xxfb
a
d
Při zmenšování intervalu Δx se součet blíží ploše pod křivkou.
Δx

Vlastnosti integrálu
xxfxxf
xxfxxfxxf
xxgcxxfcxxgcxfc
a
b
b
a
c
b
b
a
c
a
dd
ddd
ddd 2121
Slovy: -integrál je lineární (jako derivace)-určité integrály se sčítají při sjednocení intervalů-určitý integrál změní znaménko při výměně mezí

Mechanika…studuje pohyb těles.
Nejjednodušší: hmotný bod—když můžeme zanedbat rozměry tělesa, tj. když můžeme zanedbat otáčivý pohyb vůči posuvnému(na příští přednášce se budeme zabývat rotačním pohybem)
Kinematika: popis pohybu
Dynamika: příčiny
Toto rozdělení i v jiných částech fyziky

Kinematika hmotného bodu…
● okamžitá poloha
● trajektorie = všude, kudy bod při pohybu projde
● rychlost = derivace polohy podle času; tečná k trajektorii
● zrychlení = derivace rychlosti podle času; má
-tečnou složku kvůli změně velikosti rychlosti
-normálovou složku kvůli změně směru rychlosti
…zahrnuje následující pojmy:
Probereme je postupně:

Poloha, trajektorie
r(t)
x(t)
z(t)
y(t)
x
y
z
V časovém okamžiku t je hmotný bod v místě popsaném polohovým vektorem r(t)
se souřadnicemi x(t), y(t), z(t)
Trajektorie = všechna místa, jimiž bod projde (červená čára).

Rychlost
r(t)
x(t)
z(t)
y(t)
x
y
z
r(t+Δt)
tzt
tyt
txt
tvtvtvt
ttttt
ttt
zyx d
d,
d
d,
d
d,,
0prod
d
v
vrrr
● Složky vektoru rychlosti jsou derivace složek polohového vektoru.
● Vektor rychlosti je tečný ke trajektorii.
● Jednotka = m s-1

ZrychleníDerivujeme ještě jednou podle času:
tvt
tvt
tvt
tatatat
ttttt
ttt
zyxzyx d
d,
d
d,
d
d,,
0prod
d
a
avvv
Zrychlení může mít i složku tečnou k trajektorii i složku kolmou, tedy dostředivou neboli radiální.
Jednotka = m s-2

Radiální zrychlení…
0pror
tt
va
r
r
v
v
…je způsobené změnou směru rychlosti:
Podobnost trojúhelníků
0pro2
tr
v
t
r
r
v
t
vdá
kde r je poloměr křivosti,

Tečné zrychlení…
tt
a vd
dt
…je způsobené změnou velikosti rychlosti:
tr aaa
Dohromady
V autě nás točení volantem tlačí do strany, kdežto brzda a plyn nás tlačí dopředu a dozadu.

Hybnost, mezikrok k dynamice, je…
…„quantitas motus“ (množství pohybu)—Newton.Je tím větší, čím je větší hmotnost nebo rychlost objektu:
vp mVektor…má velikost i směr.
Takhle to vypadá, že hybnost je odvozená od rychlosti.Další vývoj fyziky ukázal, že hybnost je více fundamentální veličina než rychlost.
Jednotka = kg m s-1

Dynamika
Nature and nature's laws lay hid in night;God said "Let Newton be" and all was light.
Alexander Pope, 1730
It did not last: the Devil shouting "Ho.Let Einstein be," restored the status quo.
John Collings Squire, 1926
Tehdy básníky zajímala přírodověda (jako u nás Nerudu).

Newtonův základní zákon dynamiky:
● Slovy: působící síla je rovná změně hybnosti tělesa.
● Zákon platí v inerciální soustavě, tj. soustavě, která sama nezrychluje.
● Jednotka síly = N = kg m s-2
● Diferenciální rovnice (skrytě druhého řádu…viz 2. Newtonův zákon za chvíli)
Mutationem motus proportionalem esse vi motrici impressæ, et fieri secundum lineam rectam qua vis illa imprimitur.
pFtd
d

Důsledky…použitím matematiky
konstprod
d m
tkonstvkonstp0p0F
Slovy: když na těleso konstantní hmotnosti v inerciální soustavě nepůsobí síla, pak těleso setrvává v klidu nebo rovnoměrném přímočarém pohybu.
…1. Newtonův zákon
1.
2.
tt
mm
mt
mmtt
konstm
raF
avvp
2
2
d
d
d
d
d
d
d
d
Slovy: při konstantní hmotnosti je působící síla rovna součinu hmotnosti a zrychlení objektu.
…2. Newtonův zákon
Druhá derivace…diferenciální rovnice druhého řádu.

3. Když dva objekty působí jeden na druhý, ale bez působení vnější síly,např. kladivo a hřebík, pak
hnnailhammernh
nailhammervnejs
d
d
d
dd
d
d
d
FppF
pppF0
tt
tt
Slovy: síla, kterou působí objekt 1 na objekt 2 je stejné velikosti a opačnéhosměru k síle, kterou působí objekt 2 na objekt 1
…3. Newtonův zákon (zákon akce a reakce)
V případě kladiva a hřebíku síla Fnh zpomaluje kladivo a síla Fhn zrychluje hřebík.

Příklad: volný pádgF mg
gvvaF tt
tt
mtmd
d
d
dg
Gravitační (tíhová) síla:
kde g je tíhové zrychlení, které má i konstantní směr (dolů) i konstantní velikost (asi 10 m s-2)
Dosadíme do 2. Newtonova zákona:
Tedy objekt se pohybuje se zrychlením rovným tíhovému zrychlení.
Integrujeme obě strany poslední rovnosti: 0d1d vgggv tttt
Konstanta g jde před integrál kvůli linearitě.Integrační konstanta v0 má fyzikální význam počáteční rychlosti v čase t = 0.

Dráhu určíme z rychlosti druhým integrováním:
00
2
00
0
2
d1ddd
d
d
rvgr
vgvgvr
vgvr
tt
t
tttttttt
tttt
Integrační konstanta r0 má fyzikální význam počáteční polohy v čase t = 0.
gtvt
tvt
tvt
z
yx
d
d
0d
d
d
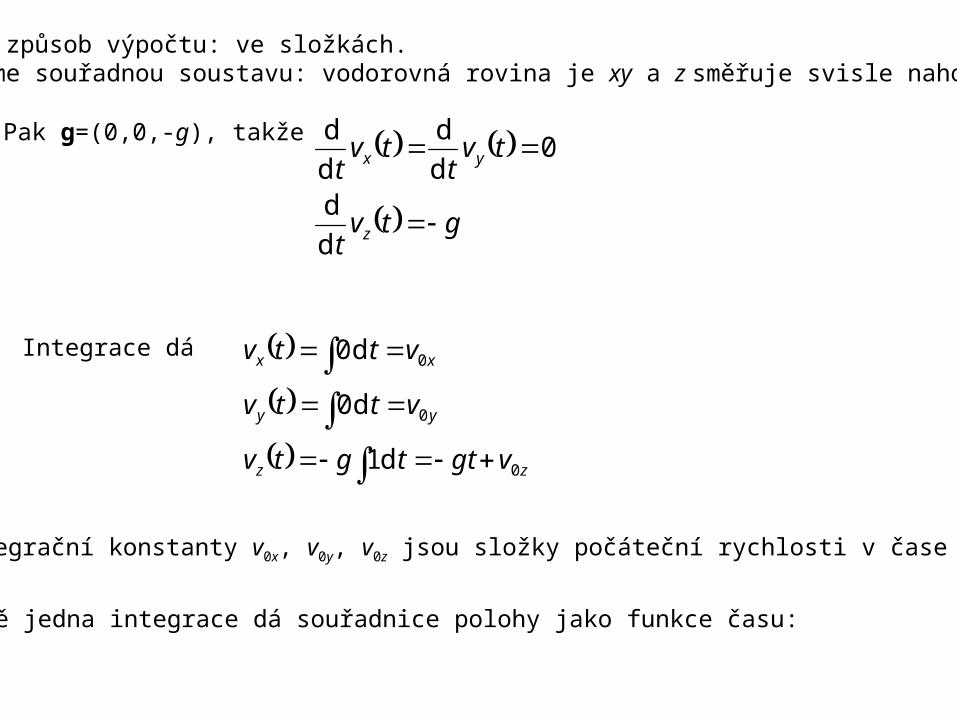
dPak g=(0,0,-g), takže
Integrace dá
zz
yy
xx
vgttgtv
vttv
vttv
0
0
0
d1
d0
d0
kde integrační konstanty v0x, v0y, v0z jsou složky počáteční rychlosti v čase t = 0.
Ještě jedna integrace dá souřadnice polohy jako funkce času:
Druhý způsob výpočtu: ve složkách. Zvolíme souřadnou soustavu: vodorovná rovina je xy a z směřuje svisle nahoru.

002
0
000
000
2
1dd
dd
dd
ztvgttvgtttvtz
ytvtvttvty
xtvtvttvtx
zzz
yyy
xxx
kde integrační konstanty x0, y0, z0 jsou souřadnice počáteční polohy v čase t = 0.Když ze souřadnic na obou stranách rovnice složíme vektory, dostaneme opět
Grafem jsou paraboly vzhůru nohama:
002
2
1rvgr ttt

Mechanická práce
Vztah W=F·d platí pro konstantní sílu a rovnou dráhu. V obecném případě:
Síla koná mechanickou práci, pokud se objekt, na který působí, pohybujev jejím směru a je úměrná i působící síle i posunutí
Když se objekt pohybuje v jiném směru, než je směr síly, vezmeme pouzesložku síly ve směru pohybu o velikosti F cos θ
Pak práce je rovna dF dFW cos …poznáváme skalární součin.
Tedy v tíhovém poli Země nekonáme práci, když závaží držíme na místě, nebos ním pohybujeme vodorovně.
Jednotka = J = N m = kg m2 s-2Vidíme (rychlost)2—viz dále

Libovolná síla a dráha
rFW
Dráhu přiblížíme lomenou čárou a aproximujeme
Toto přiblížení je tím lepší, čím jsou menší délky |Δr |
Tohle je stejný postup, jako když jsme zaváděli integrál,takže v limitě Δr→0 dostaneme
f
i
Wr
r
rF d
ri rf
F
Δr

f
i
f
i
f
i
f
i
f
i
dd
ddd
d
ddd
v
v
r
r
r
r
r
r
r
r
vvr
vrv
rarF mt
mt
mmW
2d2
1d2
1dd
2
1d v vvvvvvvv
Integrál spočteme použitím 2. Newtonova zákona:
Integrál přes r jsme díky 2.N.z. převedli na integrál přes v a příslušně změnili meze
Skalární součin komutuje a platí pro něj pravidlo pro součin derivací a Pythagorova věta:
2i
2f
2
2
1
2
1d
2
1d
2f
2i
f
i
mvmvvmmWv
v
v
v
vv
takže

Fyzikální interpretace
Veličina 1/2mv2 se nazývá kinetická energie
ikin,fkin,2i
2f 2
1
2
1EEmvmvW
Slovy: práce vykonaná vnější silou způsobí změnu kinetické energie
Toto odvození zákona přeměny mechanické práce na kinetickou energiiz 2. Newtonova zákona ilustruje vztah matematiky a fyziky.

Silové pole= síla v každém bodě (části) prostoru
Speciální ale velmi důležitý případ = Konzervativní silové pole: Pro jakoukoliv dráhu práce závisí jen na počátečním a koncovém bodě.
Příklad konzervativního pole: gravitační, elektrostatické
Nekonzervativní síla: elektromagnetická, tření--práce závisí na dráze
Důsledek: W=0 pro jakoukoliv uzavřenou dráhu (mohu zvolit dráhu nulové délky).

rrFrrFrrr
r
r
r
~d~~d~;0
0
0pot E
Slovy: potenciální energii -nahromadíme, když se pohybujeme proti síle pole z referenčního bodu-spotřebujeme, když se pohybujeme podél síly pole do referenčního bodu
0fpot0ipot ;;dddf
0
0
i
f
i
rrrrrrFrrFrrFr
r
r
r
r
r
EEW
Vlnka odlišuje integrační proměnnou od meze.Určitý integrál mění znaménko při výměně mezí.
Práci konzervativní síly můžeme vyjádřit pomocí potenciální energie:
Určité integrály se sčítají při sjednocení intervalů.Tento výsledek nezáleží na volbě referenčního bodu.
Dosadíme do zákona přeměny mechanické práce na kinetickou energii:
Protože práce konzervativního pole podél dráhy závisí jen na počátečním a Koncovém bodě, můžeme definovat potenciální energii vůči referenčnímu bodu r0:

První příklad ZZE; stále na něj věříme, ale s dalšími formami energie (elektromagnetická, tepelná,…)
ikin,fkin,0fpot0ipot ;; EEEE rrrr
0fpotfkin,0ipotikin, ;; rrrr EEEE
takže
Zákon zachování mechanické energie

xxFxxEx
x
~d~;0
0pot
Potenciální energii jsme spočetli ze síly.Můžeme ale naopak spočítat sílu z potenciální energie:
Pro jednoduchost uvažujeme pohyb v jednom rozměru podél osy x
0pot ;d
dxxE
xxF
Jelikož integrace je opačná operace k derivaci, platí:
Síla ve směru klesání potenciální energie.

Grafické znázornění
Epot(x;x0)
x0
x
FF
F
Stabilnírovnováha
Labilnírovnováha
Změna referenčního bodu posune křivku nahoru nebo dolu…nezmění síly.
-též pomůže určit rovnovážné polohy (místa, kde F = 0) a jejich druh:

Příklad: potenciální energie v tíhovém poli Země…
rrgrgrgrrFrrr
r
r
r
r
r
00pot
000
~d~d~d~; mmmE
…vůči referenčnímu bodu na povrchu Země
Skalární součin = mg krát projekce r0-r do směru svisle dolů
mghmE rrgrr 00pot ;
gr0-r
r
r0
výška h
povrch Země

Opět druhá možnost řešení ve složkách. Jako počátek zvolíme referenční bod a směr souřadných os zvolíme jako u volného pádu.
zmg
zyx
gm
~d~d~proto
~d,~d,~d~d
,0,0~
rrF
r
rF
mghzmgE
hyx
0,0,0
,,
0pot~d~d~;
0
rrFrrr
r
Dosazení dá:
mghE 0pot ;rr
Tedy oběma způsoby dostáváme známý vztah

V obou příkladech (volný pád a potenciální energie v tíhovém poli)jsme předpokládali, že g má i konstantní směr i konstantní velikost.
To je pravda jen dostatečně blízko povrchu Země, konkrétně pokudvýška je podstatně menší než poloměr Země.
Příště uvidíme, jak se chová gravitační síla i na velkých vzdálenostecha tím i co vedlo k vytvoření Newtonovy mechaniky.