syllabus - atria | e-learning · field and wave electromagnetics , david k cheng , ... 2nd edition,...
TRANSCRIPT

Field Theory 10ES36
Dept of E&C, SJBIT 1
SYLLABUS
PART- A
UNIT – 1: ELECTROSTATICS
Experimental law of coulomb, Electric field intensity, Field due to continuous
volume charge distribution, Field of a line charge, Electric flux density, Electric flux
density, Gauss law, Divergence, Vector Operator, Divergence theorem
6 Hours
UNIT – 2: ENERGY & POTENTIAL, CONDUCTORS, DIELECTRICS &
CAPACITANCE
(a).Energy expended in moving a point charge in an electric field, Line integral,
Definition of potential difference and potential, Potential field of a point charge &
system of charges, Potential gradient, Energy density in an electrostatic field.
(b).Current and current density, Continuity of current, metallic conductors,
Conductor properties and boundary conditions for dielectrics, Conductor properties
and boundary conditions for perfect dielectrics, capacitance and examples
8 Hours
UNIT – 3: POISSONS AND LAPLACES EQUATIONS
Derivation of Poisson’s equation and Laplace’s equation, Uniqueness theorem,
Examples of the solutions Laplace Equations and Poisson’s Equations
6 Hours
UNIT – 4: THE STEADY MAGNETIC FIELDS
Biot- savart law, Amphere’s circuitary law, curl, Stoke’s theorem, Magnetic flux
and flux density, Scalar and Vector magnetic potentials.
6 Hours
PART – B
UNIT – 5 : MAGNETIC FORCES, MATERIALS AND INDUCTANCE
(a).Force on a moving charge and differential current element, Force between
differential current elements, Force and Torque on a closed circuit,
(b).Magnetic materials and inductance, Magnetization and permeability, Magnetic
boundary conditions, Magnetic circuits, Potential energy and forces on magnetic
materials, Inductance and mutual inductance
8 Hours

Field Theory 10ES36
Dept of E&C, SJBIT 2
UNIT - 6: TIME VARYING MAGENTIC FIELDS AND MAXWELLS
EQUATION
Faraday’s law, Displacement current, Maxwell’s equation in point and integral
form, Retarded potentials.
6 Hours
UNIT - 7: UNIFORM PLANE WAVES
Wave propagation in free space and dielectrics, Poynting’s theorem and wave
power, Propagation in good conductors – (skin effect)
6 Hours
UNIT - 8: PLANE WAVES AT BOUNDARIES AND DISPERSIVE MEDIA
Reflection of uniform plane waves at normal incidence, SWR, Plane wave
propagation in general directions
6 Hours
TEXT BOOK:
1. Energy Electromagnetics, William H Hayt Jr . and John A Buck, Tata
McGraw-Hill, 7th
edition,2006.
REFERENCE BOOKS:
2. Electromagnetics with Applications, John Krauss and Daniel A Fleisch
McGraw-Hill, 5th edition, 1999
3. Electromagnetic Waves And Radiating Systems, Edward C. Jordan and
Keith G Balmain, Prentice – Hall of India / Pearson Education, 2nd
edition,
1968.Reprint 2002
4. Field and Wave Electromagnetics, David K Cheng, Pearson Education Asia,
2nd edition, - 1989, Indian Reprint – 2001.

Field Theory 10ES36
Dept of E&C, SJBIT 3
INDEX SHEET
SL.NO TOPIC PAGE NO.
PART – A
UNIT – 1: ELECTROSTATICS 5-16
1 Experimental Law of Coulomb 5
2 Force on a point charge 6
3 Force due to several charges 6
4 Electric field intensity 7
5 Electric Field intensity due to several charges 7
6 Electric Field intensity at a point due to infinite sheet of charge 7
7 Electric Field at a point on the axis at a charges circular ring 9
8 Electric Flux 10
9 Electric Flux Density 11
10 Gauss’s Law 12
11 Application of Gauss Law 14
12 Divergence and Maxwellls First Equation 16
UNIT – 2 : ENERGY AND POTENTIAL, CONDUCTORS,
DIELECTRICS AND CAPACITANCE
20-31
13 Energy expended in moving a point charge in an electric field 20
14 Definition of Potential and Potential difference 21
15 Equipotential surface, Potential field of a point charge 22
16 Potential field of system of charges 23
17 Potential gradient 24
18 Energy density in an electrostatic field 27
19 Potential energy in a continuous charge distribution 28
20 Boundary condition for conductor free space interface 28
21 Boundary condition for perfect dielectric 31
UNIT – 3: POISSON’S AND LAPLACES EQUATIONS 34-36
22 Laplace’s and Poisson’s Equation 34
23 Uniqueness Theorem 35
24 Examples of solution of Laplace’s equation 36
UNIT – 4 :THE STEADY MAGNETIC FIELD 40-50
25 Introduction 40
26 Biot- Savart’s Law 41
27 Amperes Circuital Law 47
28 Application of Amperes law 48
29 Magnetic Flux Density 49
30 Magnetic scalar & vector potentials 50

Field Theory 10ES36
Dept of E&C, SJBIT 4
PART – B
UNIT – 5 : MAGNETIC FORCES, MATERIALS AND
INDUCTANCE
54-73
31 Force on a charged particle 54
32 Force between two current elements 56
33 Magnetic Torque and Moment 57
34 Stokes Theorem 59
35 Force on a moving charge due to electric and magnetic fields 59
36 Force on a current element in a magnetic field 60
37 Boundary conditions on H and B 62
38 Scalar magnetic potential 65
39 Vector Magnetic potential 66
40 Force and Torque on a loop or coil 68
41 Materials in magnetic fields 70
42 Inductance 73
UNIT - 6 :TIME VARYING FIELDS AND MAXWELLS
EQUATION 77-86
43 Introduction 77
44 Transformer and motional emf 78
45 Displacement Current 81
46 Equation of continuity for time varying fields 83
47 Maxwells equations for time varying fields 84
48 Maxwells equations for static fields 86
UNIT – 7 :UNIFORM PLANE WAVE
92-113
49 Sinusoidal Time variation 92
50 Wave propagation in a conducting medium 97
51 Wave propagation in a lossless medium 106
52 Wave propagation in Dielectrics 111
53 Polarization 113
UNIT – 8 :PLANE WAVES AT BOUNDARIES AND IN
DISPERSIVE MEDIA
117-121
54 Reflection of uniform plane waves at normal incidence 117
55 Reflection coefficient and transmission coefficient in case of normal
incidence 119
56 Standing Wave Ratio 121

Field Theory 10ES36
Dept of E&C, SJBIT 5
UNIT – 1
ELECTROSTATICS
Syllabus:
Experimental law of coulomb, Electric field intensity, Field due to continuous volume
charge distribution, Field of a line charge, Electric flux density, Electric flux density,
Gauss law, Divergence, Vector Operator, Divergence theorem
REFERENCE BOOKS:
1. Energy Electromagnetics, William H Hayt Jr . and John A Buck, Tata
McGraw-Hill, 7th
edition,2006.
2. Electromagnetics with Applications, John Krauss and Daniel A Fleisch
McGraw-Hill, 5th edition, 1999
3. Electromagnetic Waves And Radiating Systems, Edward C. Jordan and Keith
G Balmain, Prentice – Hall of India / Pearson Education, 2nd
edition,
1968.Reprint 2002
4. Field and Wave Electromagnetics, David K Cheng, Pearson Education Asia,
2nd edition, - 1989, Indian Reprint – 2001.
Coulomb’s Law
Coulomb’s law states that the electrostatic force F between two point charges q1 and
q2 is directly proportional to the product of the magnitude of the charges, and
inversely proportional to the square of the distance between them., and it acts along
the line joining the two charges.
Then, as per the Coulomb’s Law,
F kq1q2
Or F = (kq1q2)/(r²) N
Where k is the constant of proportionality whose value varies with the system of units.
R^ is the unit vector along the line joining the two charges.
In SI unit, k= .
Where is called the permittivity of the free space.
It has an assigned value given as =8.834 F/m.

Field Theory 10ES36
Dept of E&C, SJBIT 6
Force on a point charge:
The forces of attraction/repulsion between two point charges and (charges
whose size is much smaller than the distance between them) are given by Coulomb’s
law:
where m/F in SI units, and R is the distance between the two charges.
Here, is the force exerted on , and is the force acting on . The unit vector
points from charge 2 toward charge 1. Accordingly, .
Force on Q1 is given by
F1 = Newtons
Force due to several charges
Let there be many point charges q1,q2,q3.........qn at distances r1,r2,r3.....rn from
charge q. The force F1, F2, F3..........Fn at the charges q1,q2,q3...........qn respectively
are:
q{ r + }
F=Fq1+Fq2+Fq3...............
Hence, F= q{ } N
q1
q2
F2
q1
q2
F
1

Field Theory 10ES36
Dept of ECE, SJBIT 7
Electric field intensity
Electric field intensity at any point in an electric field is the force experienced by positive unit
charge placed at that point.
Consider a charge Q located at a point A. At the point B in the electric fields set up by Q, it is
required
To find the electric field intensity E.
Let the charge at B be and let the charge Q be fixed at A. Let r be the distance between A and
B. As per the Coulomb’s Law, the force between Q and q is given by:
F= r N
If it is a unit positive charge, then by definition, F in the above equation gives the magnitude of
the electric field intensity E.
i.e. E=F when
Therefore, the magnitude of the electric field strength is:
E=Q/(4r
Let r be the unit vector along the line joining A and B. Thus, the vector relation between E is
written as:
E=Q/(4 or²) V/m
Electric Field intensity due to several charges
Let there be many point charges q1,q2,q3.........qn at distances r1,r2,r3.....rn be the corresponding
unit vectors. The field E1, E2, E3..........En at the charges q1,q2,q3...........qn respectively are:
r +
E=Eq1+Eq2+Eq3...............
Hence, E=
Electric field intensity at a point due to a infinite sheet of charge
Let us assume a straight line charge extending along Z axis in a cylindrical coordinate
system from -∞ to +∞ as shown in the figure 1.1. Consider an incremental length dl at a point on
the conductor. The incremental length has an incremental charge of dQ= ρl dl= ρldz’ Coulombs.
Considering the charge dQ, the incremental field intensity at point p is given by,

Field Theory 10ES36
Dept of ECE, SJBIT 8
Where
,
and
Therefore,
Integrating the above and substituting z’=ρ cot θ, we get
and

Field Theory 10ES36
Dept of ECE, SJBIT 9
Electric field intensity at a point due to a infinite sheet of charge:
Let us assume a infinite sheet of charge with surface charge density ρs as shown in the
figure 1.2. Divide the sheet of charge into differential width strips. number of str Consider an
incremental length dl at a point on the conductor. The line charge density ρl= ρs dy’.
The differential Electric field intensity at point P,
adding the effects of all the strips,
Therefore,
Electric field at a point on the axis of charged circular ring:
Let ρ be the charge density of the ring.
So, ρ=dq/dl
dq=ρdl
Electric field due to an infinitely small element = dE = dq/4πεo r² r

Field Theory 10ES36
Dept of ECE, SJBIT 10
where r is the unit vector along AP.
dE can resolved into two rectangular components, dEx and dEy. Now, dEx=dEcosθ.
Taking the magnitude of dE from above, the equation becomes,
dEx=
cosθ=
substituting for dq from above, we have;
dEx=
The component dEy is directed downwards. If we consider an element of the ring at a point
diametrically opposite to A, then its dEy component points upwards and hence, cancels with
that due to element A. The dEx components add up.
∫dEy=0.
The total field at P is the sum of the fields due to all the elements of the ring.
Therefore, E=∫dE=∫dEx+∫dEy=∫dEx
E=∫dEx=
=
But, r=(R²+x²)½
Therefore, E= ax
Where, ax is the unit vector along the x axis.
Electric flux:
The concept of electric flux is useful in association with Gauss' law. The electric flux through a
planar area is defined as the electric field times the component of the area perpendicular to the
field. If the area is not planar, then the evaluation of the flux generally requires an area integral
since the angle will be continually changing.
When the area A is used in a vector operation like this, it is understood that the magnitude of the
vector is equal to the area and the direction of the vector is perpendicular to the area.

Field Theory 10ES36
Dept of ECE, SJBIT 11
Consider a concentric sphere having radius of ‘a’m charged up to +Q C. This sphere is
then placed in another sphere having a radius of ’b’ m as shown in the figure 1.4.
There is no electrical connection between them. The outer sphere is momentarily
charged, then it found that the charge on the outer sphere is equal to the charge on the inner
sphere. This is depicted by the radial lines. This is referred as displacement flux. Therefore,
Ψ = Q.
Electric flux density:
If +Q C of charge on the inner sphere produces the electric flux of ψ, tthen electric flux ψ
uniformly distributed over the surface area 4Πa2 m
2 , where
a is the radius of the inner sphere.
The electric flux density si given by
Similarly for the outer sphere,
If the inner sphere becomes smaller and smaller retaining a charge of Q C, it becomes a point
charge. The flux density at appoint ‘r’ from the point charge is given by,

Field Theory 10ES36
Dept of ECE, SJBIT 12
The electric field intensity due to point charge in free space is given by,
Therefore in free space,
Gauss law:
The Gauss's law states that. "The electric flux passing through any closed surface is equal to the
total charge enclosed by the surface"
For the Gaussian-surface shown in the following figure, the Gauss' law can be expressed
mathematically, .
Where
Ψ = flux passing through the closed surface
§s =1 surface integral
Ds =, flux density (vector quantity) normal to the surface
Q = Total charge enclosed in the surface
Gauss law for charge Q enclosed in a closed surface:
Let Q be the point charge placed at the origin of imaginary sphere in spherical co-ordinate
system with a radius of "a" as illustrated in the figure

Field Theory 10ES36
Dept of ECE, SJBIT 13
The electrical field intensity cf the point charge is found to be equal to
Where r = Cl
and we also know that the relation between E and D as,
Therefore from (1) and (2) we get.
at the surface of the sphere,
The differential element of area on a spherical surface is, in spherical coordinate form is given
by,
Then the required integrand

Field Theory 10ES36
Dept of ECE, SJBIT 14
Then the integration over the surface as required for Gauss' law.
The limits placed for integral indicate that the integration over the entire sphere in spherical co-
ordinate system on integration we get
Thus we get, comparing LHS of Gauss' law as
,
This indicates that, Q coulombs of electric flux are crossing the surface as the enclosed charge is
Q coulombs.
Application of Gauss law:
In case of asymmetry, we need to choose a very closed surface such that D is almost constant
over the surface. Consider any point P shown in the figure 1.6 located in the rectangular co-
ordinate system.

Field Theory 10ES36
Dept of ECE, SJBIT 15
The value of D at point P, may be expressed in rectangular components as,
D=Dx0ax+Dy0ay+Dz0az. . From Gauss law, we have
In order to evaluate the integral over the closed surface, the integral must be broken into six
integrals, one over each surface,
= + .
The surface element is very small & hence D is essentially constant ,
,
Similarly,
and,
.
Therefore collectively,

Field Theory 10ES36
Dept of ECE, SJBIT 16
Charge enclosed in volume ∆v,
Divergence:
From Gauss law, we know that,
And applying limits,
The last term in the equation is the volume charge density, ρv.
We shall write it as two separate equations,
And
.
Divergence is defined as,
.
Statement: The flux crossing the closed surface is equal to the integral of the divergence of the
flux density throughout the enclosed volume, as the volume shrinks to zero.

Field Theory 10ES36
Dept of ECE, SJBIT 17
Divergence in Cartesian system,
Divergence in Cylindrical system,
Divergence in Spherical system,
Maxwell’s First equation:
From divergence theorem, we have
From Gauss law,
Per unit volume,
As the volume shrinks to zero,
Therefore, div D = ρv.

Field Theory 10ES36
Dept of ECE, SJBIT 18
Divergence theorem:
The del operator is defined as a vector operator.
.
In Cartesian coordinate system,
Which is equal to,
.
Therefore,
.
From Gauss law, we have
And by letting,
& .
Hence we have,

Field Theory 10ES36
Dept of ECE, SJBIT 19
RECOMMENDED QUESTIONS
1. State Coulomb’s law of force between any 2 point charges & indicate the units of the
quantities involved.
2. Derive the general expression for electric field vector due to infinite line charge using
Gauss law.
3. State and prove Gauss law.
4. Derive the general expression for E at a height h(h<a) , along the axis of the ring charge
& normal to its plane.
5. From gauss law show that ∆.D=σv
6. State and prove divergence theorem for symmetric condition.
7. State and prove divergence theorem for asymmetric condition.

Field Theory 10ES36
Dept of ECE, SJBIT 20
UNIT – 2
ENERGY & POTENTIAL, CONDUCTORS, DIELECTRICS AND
CAPACITANCE
Syllabus:
(a).Energy expended in moving a point charge in an electric field, Line integral, Definition of
potential difference and potential, Potential field of a point charge & system of charges, Potential
gradient, Energy density in an electrostatic field.
(b).Current and current density, Continuity of current, metallic conductors, Conductor properties
and boundary conditions for dielectrics, Conductor properties and boundary conditions for
perfect dielectrics, capacitance and examples
REFERENCE BOOKS:
1. Energy Electromagnetics, William H Hayt Jr . and John A Buck, Tata McGraw-Hill, 7th
edition,2006.
2. Electromagnetics with Applications, John Krauss and Daniel A Fleisch McGraw-Hill, 5th
edition, 1999
3. Electromagnetic Waves And Radiating Systems, Edward C. Jordan and Keith
G Balmain, Prentice – Hall of India / Pearson Education, 2nd
edition, 1968.Reprint
2002
4. Field and Wave Electromagnetics, David K Cheng, Pearson Education Asia, 2nd edition,
- 1989, Indian Reprint – 2001.
Energy expended in moving a point charge in an electric field
Electric field intensity is defined as the force experienced by unit test charge at a point p. If the
test charge is moved against the electric field, then we have to exert a force equal and opposite to
that exerted by the field and this requires work to be done.
Suppose we need to move a charge fo Q C a distance dl in an electric field E. The force
on Q arising from the electric field is,
The differential amount of work done in moving charge Q over a distance dl is given by,
, as F =QE

Field Theory 10ES36
Dept of ECE, SJBIT 21
Thus the work done to move the charge for the finite distance is given by,
Definition of Potential &Potential difference :
Potential difference(V) is defined as the work done in moving unit positive charge from one
point to another point in an electric field.
We know that,
,
Therefore V=W/Q=
VAB signifies potential difference between points A & B and the work done in moving the unit
charge from B to A. Thus B is the initial point & A is the final point.
.
From the previous example, the work done in moving charge Q from ρ= b to ρ= a was,
.
Thus the potential difference between the points a & b is given by,
Absolute electric potential is defined as the work done in moving a unit positive charge from
infinity to that point against the field.
Electric field is defined as force on unit charge.
E= F/Q.
By moving the charge Q aganist an electric field between the two points a & b work is done.
Thus ,
Edl= Fxdl/Q =work/ charge.
This work done per charge is the electric potential difference. Potential difference between points
a and b at a radial distance of ra and rb from a point charge Q is given by,

Field Theory 10ES36
Dept of ECE, SJBIT 22
If the potential at point a is VA and at point B is VB, then
.
Equipotential Surface
It is defined as "It is a surface composed of all- points having the same value of potential" on
such surfaces no work is involved in moving a unit charge, hence no potential difference
between any two points on this surface.
Potential field of a point charge
Consider a point charge Q to be placed in the origin of a spherical coordinate system. Consider 2
points A & B as shown in the figure.
Electric Potential difference between A & B, VAB is given by,
dl in spherical co ordinate system is given the figure above and E=Q/ 4Π€r
2.
Therefore,
And

Field Theory 10ES36
Dept of ECE, SJBIT 23
Potential field of system of charges: Conservative property
Potential at a point has been defined as the work done in moving unit positive charge from zero
reference to the point. Potential is independent of the path taken from one point to the other.
Potential due to a single charge is given by
V(r)= Q1/ 4Π€R. If Q1 is at r1 & point p at r, then
Potential arising from 2 charges, Q1 at r1 and Q2 at r2, is given by
Potential due to n number of charges, is given by
Or
If point charge is a small element in the continuous volume charge distribution then,
As number of point charges in the volume charge distribution tends to infinity,
Similarly if the point charges takes the form of a straight line then,
Similarly if the point charges takes the form of a surface charge then,
Potential is a function of inverse distance. Hence we can conclude that for a zero reference at
infinity, then:
I Potential due to a single point charge is the work done in moving unit positive charge
from zero reference to the point. Potential is independent of the path taken from one point to the
other
II Potential field due to number of charges is the sum of the individual potential fields
arising from each charge.

Field Theory 10ES36
Dept of ECE, SJBIT 24
III. Potential due to continuous charge distribution is found by carrying a unit charge from
infinity to the point under consideration.
is independent on the path chosen for the line integral,
regardless of the source of the E field.
Hence we can conclude that no work is done in carrying a unit positive charge around any closed
path, or
Any field that satisfies an equation of the form above is said to be conservative field
Potential gradient
Potential at any point is given by
Potential difference between 2 points separated by a very short length ∆L along which E
is essentially constant, is given by
In rectangular co ordinate system,
,
As V is a unique function of x,y,z. Then,
.
Since both the expressions are true with respect dx,dy & dz, we can write
Therefore,

Field Theory 10ES36
Dept of ECE, SJBIT 25
In rectangular co ordinate system,
Combining all the above equations allows us to use a compact expression that relates E &
V,
Gradient in other coordinate system is as given below,

Field Theory 10ES36
Dept of ECE, SJBIT 26
Dipole
Dipole is the name given to 2 point charges of equal magnitude but opposite in sign, separated by
a small distance which is small compared to the distance to point P at which we need to find
electric and potential fields. Dipole is as shown in the figure below,
Let the distance from Q & -Q to P be R1 & R2 respectively, and the distance between the two
charges be‘d’. Total Potential at point P due to Q1 & Q2 is given by,
Since mid-way between the 2 point charges are located at Z=0, R1= R2 & therefore the potential
is zero.
For distant point, R1R2=r2 and R1 & R2 are the approximately parallel as shown in the figure
below
From the figure, R2-R1 =d cos θ;
Therefore,

Field Theory 10ES36
Dept of ECE, SJBIT 27
The plane Z=0 is at zero potential. Using gradient relationship in spherical co ordinates,
From the above we obtain,
Or
Energy density in an electrostatic field:
Consider a surface without charge. Bringing a charge Q1 from infinity to any point on the
surface requires no work as there is no field present. The positioning of Q2 at appoint in the field
of Q1 requires an amount of work to be done which is given by
.
Similarly work required to position each additional charge in the field is given by,
Total positioning work = Potential energy of the field
Bringing the charges in the reverse order, the work done is given by,
Adding the 2 energy expressions, we get
For n number of charges,

Field Theory 10ES36
Dept of ECE, SJBIT 28
Potential energy in a continuous charge distribution:
For the region with continuous charge distribution, the equation for WE=
By vector identity which is true for any scalar function V & vector D,
,
Then,
.
From Guass law, We can write
and from gradient
Boundary condition for conductor free space interface:
Consider a closed path at the boundary between conductor and a dielectric, such that
∆h→0.
We know that work done in moving a charge over a closed path is zero i.e.,
.
Therefore the integral can be broken up as,

Field Theory 10ES36
Dept of ECE, SJBIT 29
.
Let the length from a to b or c to d be ∆W and from a to d or b to c be ∆h , hence we obtain,
.
Hence we obtain E∆W=0 & therefore Et=0
Hence at the conductor dielectric interface tangential component of the electric field intensity is
zero.
Consider a gaussian cylinder of radius ρ and height ∆h at the boundary, Applying Gauss
law,
& then integrating over the distinct surfaces we get
.
Flux experienced by the lateral surface is zero & Flux experienced by the bottom surface is zero
as charge inside the conductor is zero. Therefore
or .
At the conductor dielectric interface normal component of the electric flux density is equal to the
surface charge density.
Field Theory 10ES36
Dept of ECE, SJBIT 30
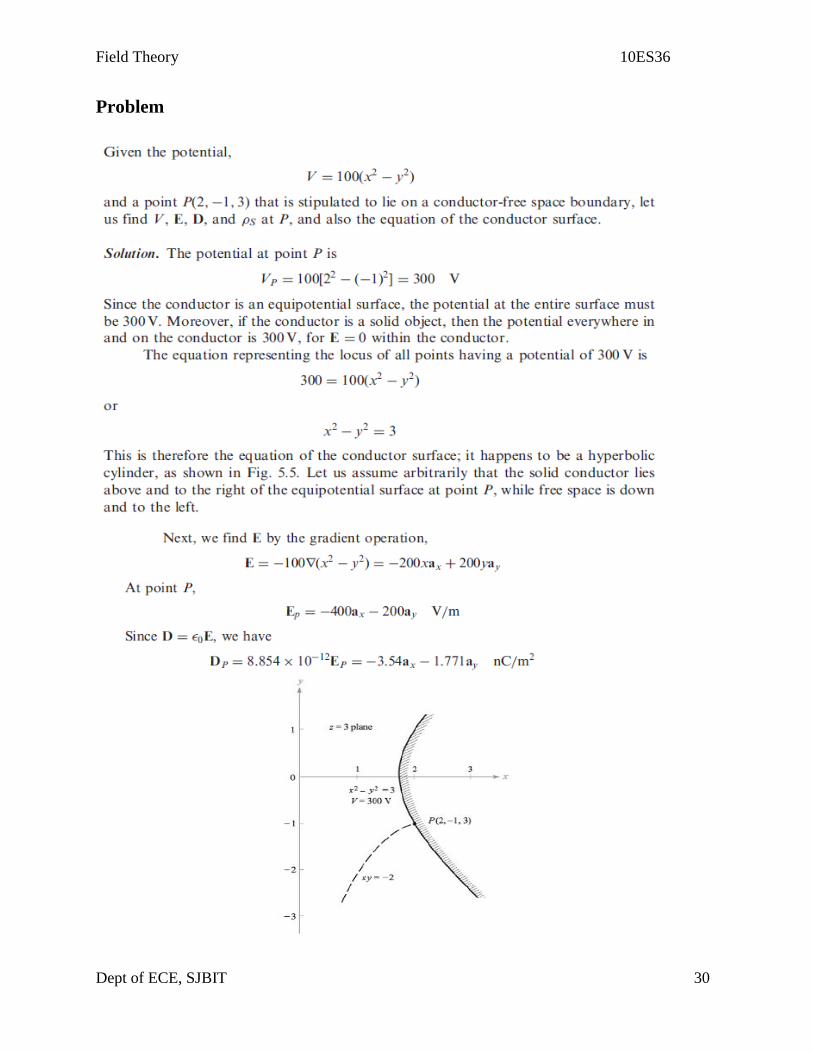
Problem

Field Theory 10ES36
Dept of ECE, SJBIT 31
Boundary condition for perfect dielectric:
Consider a closed path abcda at the dielectric dielectric interface & ∆h→0. The work done in
moving a unit charge over a closed path is zero. Therefore,
We know that the work done in moving a unit charge over a closed path is zero. Therefore,
, and hence
.
The small contribution of the normal component of E due to ∆h becomes negligible. Therefore,
. & as D = € E we get,
or .
At the dielectric – dielectric boundary tangential component of the E is continuous where as
tangential component of electric flux density is discontinuous.
Consider a gaussian cylinder of radius ρ and height ∆h at the boundary, Applying Gauss
law,

Field Theory 10ES36
Dept of ECE, SJBIT 32
& then integrating over the distinct surfaces we get
.
Flux experienced by the lateral surface is zero. Therefore
.
From which,
.
For perfect dielectric, DN1= DN2, then €2E2 = €1E1.
At the dielectric dielectric boundary normal component of the flux density is continuous. Normal
components of D are continuous,
.
The ratio of the tangential components,
Or .
And
.
The magnitude of D is given by,
.

Field Theory 10ES36
Dept of ECE, SJBIT 33
RECOMMENDED QUESTIONS
1. Define electric scalar potential. Establish the relationship between intensity and
potential.
2. Discuss the boundary conditions between 2 perfect dielectrics.
3. State & explain the principle of charge conservation.
4. Derive for energy stored in an electrostatic field.
5. Derive for energy expended in moving a point charge in an electric field.
6. Define Potential & potential difference.
7. Prove that E is Grad of V
8. Write a short note on dipole
9. Three point charges, 0.4 μC each, are located at (0,0,-1), (0,0,0) and (0,0,1) in free
space. (a). Find an expression for the absolute potential as a function of Z along the
lne x=0, y=1. (b) Sketch V(Z).

Field Theory 10ES36
Dept of ECE, SJBIT 34
UNIT – 3
POISSONS AND LAPLACES EQUATION
Syllabus:
Derivation of Poisson’s equation and Laplace’s equation, Uniqueness theorem, Examples of the
solutions Laplace Equations and Poisson’s Equations
REFERENCE BOOKS:
1. Energy Electromagnetics, William H Hayt Jr . and John A Buck, Tata McGraw-Hill, 7th
edition,2006.
2. Electromagnetics with Applications, John Krauss and Daniel A Fleisch McGraw-Hill, 5th
edition, 1999
3. Electromagnetic Waves And Radiating Systems, Edward C. Jordan and Keith
G Balmain, Prentice – Hall of India / Pearson Education, 2nd
edition, 1968.Reprint
2002
4. Field and Wave Electromagnetics, David K Cheng, Pearson Education Asia, 2nd edition,
- 1989, Indian Reprint – 2001.
Laplace’s & Poisson’s equation:
Laplace’s & Poisson’s equation enable us to find potential fields within regions bounded by
known potentials or charge densities.
Derivation of Laplace’s & Poisson’s equation:
From Gauss law in point form, we have
-------------------------------(1).
By definition, D = €E. & from gradient relationship,
.
By substituting the above in equation 1, we get
Or
-------------------------(2).
For a homogeneous region in which € is constant. Equation 2 is poisson’s equation.

Field Theory 10ES36
Dept of ECE, SJBIT 35
In rectangular co-ordinates,
.
Therefore,
.
If ρv = 0, indicating zero volume charge density, but allowing point charges, line charges &
surface charge density to exist at singular locations as sources of the field, then
which is Laplace’s equation. The operorator is called the Laplacian of V.
In rectangular coordinates Laplace equation is,
,
In cylindrical coordinates,
& in spherical coordinates,
Every conductor produces a field for which V=0. In examples if it satisfies the boundary
conditions and Laplace equation, then it is the only possible answer.
Uniqueness theorem:
Let us assume we have two solutions of Laplace equation, V1 and V2 , both general functions of
the coordinates used. Therefore
V1 = 0 and V2 = 0. From which .
On the boundary, Vb1=Vb2. Let the difference between V1 & V2 be Vd. Therefore Vd= V1-V2.
From Laplace equation,
Vd= V2- V1. On the boundary Vd=0.

Field Theory 10ES36
Dept of ECE, SJBIT 36
From Divergence theorem,
.
Using vector identity,
.
We get,
.
As V1= V2,
.
Surface consists of boundaries and hence
.
Therefore
.
And
.
As
We obtain,
.
Example of solution of Laplace’s equation:
Example 1: For a Parallel plate capacitor:
Let us assume V is a function of x. Laplace’s equation reduces to,
. Since V is not a function of y & z.
Integrating the above equation twice we obtain,
.
Where A & B are integration constants.
If V=0 at x=0 and V= V0 at x = d, then,
A= V0/d and B = 0.

Field Theory 10ES36
Dept of ECE, SJBIT 37
Therefore,
.
Hence we have,
And the capacitance is
.
Example 2: Capacitance of a co-axial cylindrical conductor:
Assuming variation with respect to ρ Laplace equation becomes,
.
Integrating twice on both sides we obtain,
,
.
Assuming V = V0 at ρ = A and V= 0 at ρ = B, We get
.
Field Theory 10ES36
Dept of ECE, SJBIT 38
.
Example 3: Spherical capacitor:
Assuming variation with respect to r Laplace equation becomes,
.
Integrating twice on both sides we obtain,
,
.
Assuming V = V0 at θ = Π/2 and V= 0 at θ = α, We get
.
,
,
,

Field Theory 10ES36
Dept of ECE, SJBIT 39
and
.
RECOMMENDED QUESTIONS
1. Derive Poisson’s & Laplace’s equation.
2. Using Laplace’s equation , Prove that the potential distribution at any point in the
region between two concentric cylinders of radii A & B as
V=Voln ῤ/B /ln A/B
3. State and prove uniqueness theorem
4. Derive for Capacitance of Parallel plate capacitor
5. Derive for Capacitance of Concentric spherical capacitor.
6. Let V = 2xy2z
3 and ε = ε0. Given point P(1,2,-1), Find (a) V at P; (b) E at P; (c) ρv at
P; (d) the equation of the equipotential surface passing through P; (e) the equation of
the streamline passing through P; (f) Does V satisfy the Laplaces Equation

Field Theory 10ES36
Dept of ECE, SJBIT 40
UNIT – 4
MAGNETOSTATIC FIELDS
Syllabus:
Biot- savart law, Amphere’s circuitary law, curl, Stoke’s theorem, Magnetic flux and flux
density, Scalar and Vector magnetic potentials.
REFERENCE BOOKS:
1. Energy Electromagnetics, William H Hayt Jr . and John A Buck, Tata McGraw-Hill, 7th
edition,2006.
2. Electromagnetics with Applications, John Krauss and Daniel A Fleisch McGraw-Hill, 5th
edition, 1999
3. Electromagnetic Waves And Radiating Systems, Edward C. Jordan and Keith
G Balmain, Prentice – Hall of India / Pearson Education, 2nd
edition, 1968.Reprint
2002
4. Field and Wave Electromagnetics, David K Cheng, Pearson Education Asia, 2nd edition,
- 1989, Indian Reprint – 2001.
Introduction:
Static electric fields are characterized by E or D. Static magnetic fields, are characterized by H
or B. There are similarities and dissimilarities between electric and magnetic fields. As E and D
are related according to D = E for linear material space, H and B are related according to B
= H.
A definite link between electric and magnetic fields was established by Oersted in 1820. An
electrostatic field is produced by static or stationary charges. If the charges are moving with
constant velocity, a static magnetic (or magnetostatic) field is produced. A magnetostatic field is
produced by a constant current flow (or direct current). This current flow may be due to
magnetization currents as in permanent magnets, electron-beam currents as in vacuum tubes, or
conduction currents as in current-carrying wires.
The development of the motors, transformers, microphones, compasses, telephone bell ringers,
television focusing controls, advertising displays, magnetically levitated high speed vehicles,

Field Theory 10ES36
Dept of ECE, SJBIT 41
memory stores, magnetic separators, and so on, involve magnetic phenomena and play an
important role in our everyday life.
There are two major laws governing magnetostatic fields:
(1) Biot-Savart's law, and
(2) Ampere's circuit law.
Like Coulomb's law, Biot-Savart's law is the general law of magnetostatics. Just as Gauss's law
is a special case of Coulomb's law, Ampere's law is a special case of Biot-Savart's law and is
easily applied in problems involving symmetrical current distribution.
BIOT SAVART's LAW:
Biot-Savart's law states that the magnetic field intensity dH produced at a point P, as shown in
Figure 1.1, by the differential current element I dl is proportional to the product I dl and the sine
of the angle between the element and the line joining P to the element and is inversely
proportional to the square of the distance R between P and the element.
That is,
2
sin
R
dlIdH
(1.1)
or
2
sin
R
dlKIdH
(1.2)
where, k is the constant of proportionality. In SI units, k = 1/4. So, eq. (1.2) becomes
24
sin
R
dlIdH
(1.3)
From the definition of cross product equation A x B = AB Sin AB an, it is easy to notice that eq.
(1.3) is better put in vector form as
32 44 R
RIdl
R
aIdldH R
(1.4)

Field Theory 10ES36
Dept of ECE, SJBIT 42
where R in the denominator is |R| and aR = (vector R/|R|}. Thus, the direction of dH can be
determined by the right-hand rule with the right-hand thumb pointing in the direction of the
current, the right-hand fingers encircling the wire in the direction of dH as shown in
Figure 1.2(a). Alternatively, one can use the right-handed screw rule to determine the direction
of dH: with the screw placed along the wire and pointed in the direction of current flow, the
direction of advance of the screw is the direction of dH as in Figure 1.2(b).
Figure 1.1: Magnetic field dH at P due to current element I dl.
Figure 1.2: Determining the direction of dH using (a) the right-hand rule, or (b) the right-handed
screw rule.
It is customary to represent the direction of the magnetic field intensity H (or current I) by a
small circle with a dot or cross sign depending on whether H (or I) is out of, or into, the page as
illustrated in Figure 1.3.

Field Theory 10ES36
Dept of ECE, SJBIT 43
As like different charge configurations, one can have different current distributions: line current,
surface current and volume current as shown in Figure 1.4. If we define K as the surface current
density (in amperes/meter) and J as the volume current density (in amperes/meter square), the
source elements are related as
I dl K dS J dv (1.5)
Thus, in terms of the distributed current sources, Biot-Savart law as in eq. (1.4) becomes
L
R
R
aIdlH
24 (Line current) (1.6)
S
R
R
aKdSH
24 (Surface current) (1.7)
V
R
R
aJdvH
24 (Volume current) (1.8)
As an example, let us apply eq. (1.6) to determine the field due to a straight current carrying
filamentary conductor of finite length AB as in Figure 1.5. We assume that the conductor is
along the z-axis with its upper and lower ends respectively subtending angles
Figure 1.3: Conventional representation of H (or I) (a) out of the page and (b) into the page.

Field Theory 10ES36
Dept of ECE, SJBIT 44
Figure 1.4: Current distributions: (a) line current (b) surface current (c) volume current.
2 and 1 at P, the point at which H is to be determined. Particular note should be taken of this
assumption, as the formula to be derived will have to be applied accordingly. If we consider the
contribution dH at P due to an element dl at (0, 0, z),
34 R
RIdldH
(1.9)
But dl = dz az and R = a - zaz , so
dl x R = dz a (1.10)
Hence,
a
z
dzIH
2
3224
(1.11)
Figure 1.5: Field at point P due to a straight filamentary conductor.

Field Theory 10ES36
Dept of ECE, SJBIT 45
Letting z = cot , dz = - cosec2 d, equation (1.11) becomes
2
133
22
cos
cos
4
a
ec
decIH
da
I
2
1
sin4
Or
aI
H 12 coscos4
(1.12)
The equation (1.12) is generally applicable for any straight filamentary conductor of finite
length. Note from eq. (1.12) that H is always along the unit vector a (i.e., along concentric
circular paths) irrespective of the length of the wire or the point of interest P. As a special case,
when the conductor is semi-infinite (with respect to P), so that point A is now at O(0, 0, 0) while
B is at (0, 0, ); 1 = 90, 2 = 0, and eq. (1.12) becomes
aI
H4
(1.13)
Another special case is when the conductor is infinite in length. For this case, point A is at (0, 0,
- ) while B is at (0, 0, ); 1 = 180, 2 = 0. So, eq. (1.12) reduces to
aI
H2
(1.14)
To find unit vector a in equations (1.12) to (1.14) is not always easy. A simple approach is to
determine a from
aaa (1.15)

Field Theory 10ES36
Dept of ECE, SJBIT 46
where al is a unit vector along the line current and a is a unit vector along the perpendicular line
from the line current to the field point.
Illustration: The conducting triangular loop in Figure 1.6(a) carries a current of 10 A. Find H at
(0, 0, 5) due to side 1 of the loop.
Solution:
This example illustrates how eq. (1.12) is applied to any straight, thin, current-carrying
conductor. The key point to be kept in mind in applying eq. (1.12) is figuring out 1, 2, and
a. To find H at (0, 0, 5) due to side 1 of the loop in Figure 1.6(a), consider Figure
Figure 1.6: (a) conducting triangular loop (b) side 1 of the loop.
1.6(b), where side 1 is treated as a straight conductor. Notice that we join the Point of interest (0,
0, 5) to the beginning and end of the line current. Observe that 1, 2 and are assigned in the
same manner as in Figure 1.5 on which eq. (1.12) is based.

Field Theory 10ES36
Dept of ECE, SJBIT 47
cos 1 = cos 90 = 0,
29
2cos 2 , = 5
To determine a is often the hardest part of applying eq. (1.12). According to eq. (1.15), al = ax
and a = az, so
a = ax x az = -ay
Hence,
)(029
2
)5(4
10coscos
4
1121 yaaH
= -59.1 ay mA/m
Ampere's circuit law
Ampere's circuit law states that the line integral of the tangential components of H around a
closed path is the same as the net current Ienc enclosed by the path
In other words, the circulation of H equals Ienc ; that is,
encIdlH (1.16)
Ampere's law is similar to Gauss's law and it is easily applied to determine H when the current
distribution is symmetrical. It should be noted that eq. (1.16) always holds whether the current
distribution is symmetrical or not but we can only use the equation to determine H when
symmetrical current distribution exists. Ampere's law is a special case of Biot-Savart's law; the
former may be derived from the latter.
By applying Stoke's theorem to the left-hand side of eq. (1.16), we obtain
SL
enc dSHdlHI )( (1.17)
But
S
enc dSJI (1.18)
Field Theory 10ES36
Dept of ECE, SJBIT 48
Comparing the surface integrals in eqs. (1.17) and (1.18) clearly reveals that
x H = J (1.19)
This is the third Maxwell's equation to be derived; it is essentially Ampere's law in differential
(or point) form whereas eq. (1.16) is the integral form. From eq. (1.19), we should observe that
X H = J 0; that is, magneto-static field is not conservative.
APPLICATIONS OF AMPERE'S LAW
Infinite Line Current
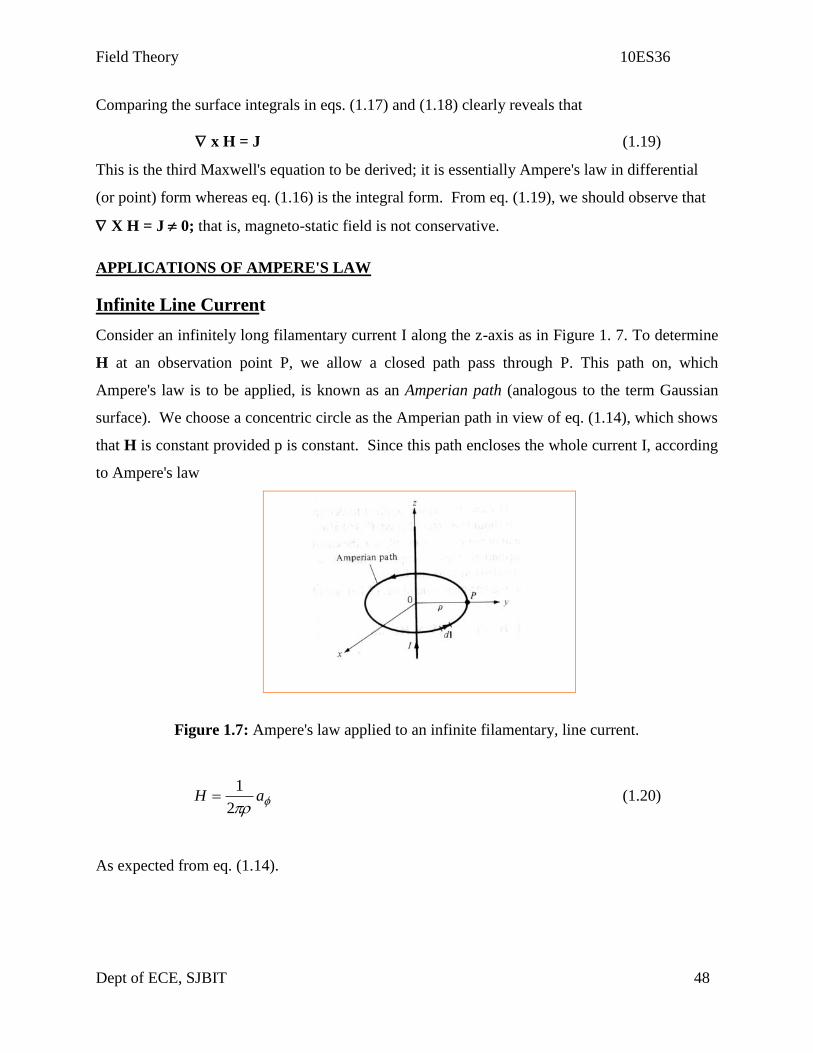
Consider an infinitely long filamentary current I along the z-axis as in Figure 1. 7. To determine
H at an observation point P, we allow a closed path pass through P. This path on, which
Ampere's law is to be applied, is known as an Amperian path (analogous to the term Gaussian
surface). We choose a concentric circle as the Amperian path in view of eq. (1.14), which shows
that H is constant provided p is constant. Since this path encloses the whole current I, according
to Ampere's law
Figure 1.7: Ampere's law applied to an infinite filamentary, line current.
aH2
1 (1.20)
As expected from eq. (1.14).

Field Theory 10ES36
Dept of ECE, SJBIT 49
MAGNETIC FLUX DENSITY
The magnetic flux density B is similar to the electric flux density D. As D = 0E in free space,
the magnetic flux density B is related to the magnetic field intensity H according to
B = 0 H (1.21)
where, 0 is a constant known as the permeability of free space. The constant is in henrys/meter
(H/m) and has the value of
0 = 4 x 10-7
H/m (1.22)
The precise definition of the magnetic field B, in terms of the magnetic force, can be discussed
later.
Figure 1.8: Magnetic flux lines due to a straight wire with current coming out of the page
The magnetic flux through a surface S is given by
S
dSB (1.23)
Where the magnetic flux is in webers (Wb) and the magnetic flux density is a webers/square
meter (Wb/m2) or teslas.
An isolated magnetic charge does not exit. Total flux through a closed surface in a magnetic
field must be zero;
that is,
0 dSB (1.24)

Field Theory 10ES36
Dept of ECE, SJBIT 50
This equation is referred to as the law of conservation of magnetic flux or Gauss'’s law for
magnetostatic fields just as D. dS = Q is Gauss's law for electrostatic fields. Although the
magnetostatic field is not conservative, magnetic flux is conserved.
By applying the divergence theorem to eq. (1.24), we obtain
0 Sv
dvBdSB
Or
. B = 0 (1.25)
This equation is the fourth Maxwell's equation to be derived. Equation (1.24) or (1.25) shows
that magnetostatic fields have no sources or sinks. Equation (1.25) suggests that magnetic field
lines are always continuous.
TABLE 1.2: Maxwell's Equations for Static EM Fields
Differential (or
Point) Form
Integral Form Remarks
. D = v S
v
vdvdSD Gauss's law
. B = 0 S
dSB 0 Nonexistence of magnetic monopole
x E = 0 L
dlE 0 Conservativeness of electrostatic field
x H = J L
s
dSJdlH Ampere's law
The Table 1.2 gives the information related to Maxwell's Equations for Static Electromagnetic
Fields.
MAGNETIC SCALAR AND VECTOR POTENTIALS
We recall that some electrostatic field problems were simplified by relating the electric Potential
V to the electric field intensity E (E = -V). Similarly, we can define a potential

Field Theory 10ES36
Dept of ECE, SJBIT 51
associated with magnetostatic field B. In fact, the magnetic potential could be scalar Vm vector
A. To define Vm and A involves two important identities:
x (V) = 0 (1.26)
. ( x A) = 0 (1.27)
which must always hold for any scalar field V and vector field A.
Just as E = -V, we define the magnetic scalar potential Vm (in amperes) as related to H
according to
H = - Vm if J = 0 (1.28)
The condition attached to this equation is important and will be explained. Combining eq. (1.28)
and eq. (1.19) gives
J = x H = - x (- Vm) = 0 (1.29)
since Vm, must satisfy the condition in eq. (1.26). Thus the magnetic scalar potential Vm is only
defined in a region where J = 0 as in eq. (1.28). We should also note that Vm satisfies Laplace's
equation just as V does for electrostatic fields; hence,
2 Vm = 0, (J = 0) (1.30)
We know that for a magnetostatic field, x B = 0 as stated in eq. (1.25). In order to satisfy eqs.
(1.25) and (1.27) simultaneously, we can define the vector magnetic potential A (in Wb/m) such
that
B = x A (1.31)
Just as we defined
r
dQV
04 (1.32)
We can define
L R
dlIA
4
0 for line current (1.33)

Field Theory 10ES36
Dept of ECE, SJBIT 52
S R
dSKA
4
0 for surface current (1.34)
v R
dvJA
4
0 for volume current (1.35)
Illustration 1: Given the magnetic vector potential A = -2/4 az Wb/m, calculate the total
magnetic flux crossing the surface = /2, 1 2m, 0 z 5m.
Solution:
adzddSaa
AAB z
,
2
4
15)5(
4
1
2
1 22
1
5
0
dzddSBz
= 3.75 Wb
Illustration 2:
Identify the configuration in figure 1.9 that is not a correct representation of I and H.
Figure 1.9: Different I and H representations (related to Illustration 2)
Solution:
Field Theory 10ES36
Dept of ECE, SJBIT 53
Figure 1.9 (c) is not a correct representation. The direction of H field should have been outwards
for the given I direction.
RECOMMENDED QUESTIONS
1. State and prove Biot Savart’s law.
2. Derive for H at a point due to an infinite long conductor.
3. Derive for H at a point due to finite straight conductor.
4. Derive for H on the axis of a circular loop.
5. State and prove Ampere’s circuit law.
6. Mention the applications of Ampere’s circuit law and derive any one of them in brief.
7. Define curl and discuss the significance of curl.
8. Derive for Ampere’s law in point form.
9. Define magnetic flux & flux density.
10. Write a short note on magnetic scalar and vector potential.

Field Theory 10ES36
Dept of ECE, SJBIT 54
UNIT – 5
MAGNETIC FORCES, MATERIALS AND INDUCTANCE
Syllabus:
(a).Force on a moving charge and differential current element, Force between differential current
elements, Force and Torque on a closed circuit,
(b).Magnetic materials and inductance, Magnetization and permeability, Magnetic boundary
conditions, Magnetic circuits, Potential energy and forces on magnetic materials, Inductance and
mutual inductance
REFERENCE BOOKS:
1. Energy Electromagnetics, William H Hayt Jr . and John A Buck, Tata McGraw-Hill, 7th
edition,2006.
2. Electromagnetics with Applications, John Krauss and Daniel A Fleisch McGraw-Hill, 5th
edition, 1999
3. Electromagnetic Waves And Radiating Systems, Edward C. Jordan and Keith
G Balmain, Prentice – Hall of India / Pearson Education, 2nd
edition, 1968.Reprint
2002
4. Field and Wave Electromagnetics, David K Cheng, Pearson Education Asia, 2nd edition,
- 1989, Indian Reprint – 2001.
Force on a Charged Particle
According to earlier information, the electric force Fe, on a stationary or moving electric charge
Q in an electric field is given by Coulornb's experimental law and is related to the electric field
intensity E as
Fe = QE (2.1)
This shows that if Q is Positive, Fe and E have the same direction.
A magnetic field can exert force only on a moving charge. From experiments, it is found that the
magnetic force Fm experienced by a charge Q moving with a velocity u in a magnetic field B is
Fm = Qu x B (2.2)
This clearly shows that Fm is perpendicular to both u and B.

Field Theory 10ES36
Dept of ECE, SJBIT 55
From eqs. (2.1) and (2.2), a comparison between the electric force Fe and the magnetic force Fm
can be made. Fe is independent of the velocity of the charge and can perform work on the charge
and change its kinetic energy. Unlike Fe, Fm depends on the charge velocity and is normal to
it. Fm cannot perform work because it is at right angles to the direction of motion, of the charge
(Fm.dl = 0); it does not cause an increase in kinetic energy of the charge. The magnitude of Fm is
generally small compared to Fe except at high velocities.
For a moving charge Q in the Presence of both electric and magnetic fields, the total force on the
charge is given by
F = Fe + Fm
or
F = Q (E + u x B) (2.3)
This is known as the Lorentz force equation. It relates mechanical force to electrical force. If the
mass of the charged Particle moving in E and B fields is m, by Newton's second law of motion.
BuEQdt
dumF (2.4)
The solution to this equation is important in determining the motion of charged particles in E and
B fields. We should bear in mind that in such fields, energy transfer can be only by means of the
electric field. A summary on the force exerted on a charged particle is given in table 2.1.
TABLE 2.1: Force on a Charged Particle
State of Particle E Field B Field Combined E and B
Fields
Stationary QE - QE
Moving QE Qu x B Q(E + u x B)
The magnetic field B is defined as the force per unit current element
Alternatively, B may be defined from eq. (2.2) as the vector which satisfies Fm / q = u x B just as
we defined electric field E as the force per unit charge, Fe / q.

Field Theory 10ES36
Dept of ECE, SJBIT 56
Force between Two Current Elements
Let us now consider the force between two elements I1 dl1 and I2 dl2. According to Biot-Savart's
law, both current elements produce magnetic fields. So we may find the force d(dF1) on element
I1 dl1 due to the field dB2 produced by element I2 dl2 as shown in Figure 2.1.
As per equation
dF = I dl x B2
d(dF1) = I1 dl1 x dB2 (2.5)
But from Biot-Savart's law,
2
21
220
24
21
R
adlIdB
R
(2.6)
Hence,
2
21
22110
14
)( 21
R
adlIdlIdFd
R
(2.7)
Figure 2.1: Force between two current loops.
This equation is essentially the law of force between two current elements and is analogous to
Coulomb's law, which expresses the force between two stationary charges. From eq. (2.7), we
obtain the total force F1 on current loop 1 due to current loop 2 shown Figure 2.1 as
2 2
21
21210
121
14 L
R
L R
adldlIIF
(2.8)

Field Theory 10ES36
Dept of ECE, SJBIT 57
Although this equation appears complicated, we should remember that it is based on eq. (2.5). It
is eq. (8. 10) that is of fundamental importance.
The force F2 on loop 2 due to the magnetic field B1 from loop 1 is obtained from eq. (2.8) by
interchanging subscripts 1 and 2. It can be shown that F2 = - F1; thus F1 and F2 obey Newton's
third law that action and reaction are equal and opposite. It is worthwhile to mention that eq.
(2.8) was experimentally established by Qersted and Ampete; Biot and Savart (Ampere's
colleagues) actually based their law on it.
MAGNETIC TORQUE AND MOMENT
Now that we have considered the force on a current loop in a magnetic field, we can determine
the torque on it. The concept of a current loop experiencing a torque in a magnetic field is of
paramount importance in understanding the behavior of orbiting charged particles, d.c. motors,
and generators. If the loop is placed parallel to a magnetic field, it experiences a force that tends
to rotate it.
The torque T (or mechanical moment of force) on the loop is the, vector product of the force F
and the moment arm r.
That is,
T = r x F (2.9)
and its units are Newton-meters.
Let us apply this to a rectangular loop of length l and width w placed in a uniform magnetic field
B as shown in Figure 8.5(a). From this figure, we notice that dl is parallel to B along sides 12
and 34 of the loop and no force is exerted on those sides. Thus
3
2
1
4BdlIBdlIF
l
lzz BadzIBadzI
2
0

Field Theory 10ES36
Dept of ECE, SJBIT 58
Figure 2.2: Rectangular planar loop in a uniform magnetic field.
or
F= F0 – F0 = 0 (2.10)
Where, |F0| = I Bl because B is uniform. Thus, no force is exerted on the loop as a whole.
However, F0 and –F0 act at different points on the loop, thereby creating a couple. If the normal
to the plane of the loop makes an angle with B, as shown in the cross-sectional view of Figure
2.2(b), the torque on the loop is
|T| = |F0| w sin
or
T = B I l w sin (2.11)
But lw = S, the area of the loop. Hence,
T = BIS sin (2.12)
We define the quantity
m = I S an (2.13)
as the magnetic dipole moment (in A/M2) of the loop. In eq. (2.13), an is a unit normal vector to
the plane of the loop and its direction is determined by the right-hand rule: fingers in the
direction of current Hand thumb along an.
The magnetic dipole moment is the product of current and area of the loop; its reaction is normal
to the loop.
Introducing eq. (2.13) in eq. (2.12), we obtain

Field Theory 10ES36
Dept of ECE, SJBIT 59
T = m x B (2.14)
Stoke's theorem
Stoke's Theorem relates a line integral to the surface integral and vice-versa, that is
C
S
dSHdLH )( (3.1)
Force on a moving charge due to electric and magnetic fields
If there is a charge or a moving charge, Q in an electric field, E, there exists a force on the
charge. This force is given by
FE = QE (3.2)
If a charge, Q moving with a velocity, V is placed in a magnetic field, B (=H), then there exists
a force on the charge (Fig. 3.1). This force is given by
FH = Q(V x B) (3.3)
B = magnetic flux density, (wb/m2)
V = velocity of the charge, m/s
Fig. 3.1: Direction of field, velocity and force
If the charge, Q is placed in both electric and magnetic fields, then the force on the charge is
F =Q (E + V x B) (3.4)
This equation is known as Lorentz force equation.

Field Theory 10ES36
Dept of ECE, SJBIT 60
Problem 1: A charge of 12 C has velocity of 5ax + 2ay - 3az m/s. Determine F on the charge in
the field of (a) E=18ax,+5ay +10az V/m
(b) B = 4ax + 4ay + 3az wb/m2.
Solution:
(a) The force, F on the charge, Q due to E is
F = QE = 12 (18ax + 5ay + 10az)
= 216ax + 60ay + 120az
or, F=Q |E|=222 1051812
F = 254.27 N
(b) The force F on the charge due to B is
F = Q[V x B)
Here V = 5ax + 2ay - 3az m/s
B = 4 ax + 4 ay + 3 az wb / m2
F = 12 [18ax - 27ay + 12az]
or, F= )144729324(12
F = 415.17 N
Force on a current element in a magnetic field
The force on a current element when placed in a magnetic field, B is
F = IL x B (3.5)
or,
F = I L B Sin Newton (3.6)
where is the angle between the direction of the current element and the direction of magnetic
flux density
B = magnetic flux density, wb/m2
IL = current element, Amp-m
Proof: Consider a differential charge, dQ to be moving with a velocity, V in a magnetic field, H
= (B/). Then the differential force on the charge is given by

Field Theory 10ES36
Dept of ECE, SJBIT 61
dF = dQ (V x B) (3.7)
But
dQ = d
dF = d (V x B)
= ( V x B) d
But V = J
dF = J d x B
Jd is nothing but IdL,
dF =IdL x B
or, F = IL x B, Newton (3.8)
Problem 2: A current element 4 cm long is along y-axis with a current of 10 mA flowing in y-
direction. Determine the force on the current element due to the magnetic field if the magnetic
field H = (5ax/) A/m.
Solution:
The force on a current element under the influence of magnetic field is
F = IL x B
Here, IL = 10 x 10-3
x 0.04ay
= 4 x l0-4
ay
H = (5ax/) A/m
B = 5ax wb/m2
F = 4 x l0-4
ay x 5ax
or F = (0.4ay x 5ax) x 10-3
F = -2.0az mN

Field Theory 10ES36
Dept of ECE, SJBIT 62
BOUNDARY CONDITIONS ON H AND B
1. The tangential component of magnetic field, H is continuous across any boundary except
at the surface of a perfect conductor, that is,
Htanl - Htan2 = Js (3.9)
At non-conducting boundaries, Js = 0.
2. The normal component of magnetic flux density, B is continuous across any
discontinuity, that is,
Bnl = Bn2 (3.10)
Proof: Consider Fig. 3.2 in which a differential rectangular loop across a boundary separating
medium 1 and medium 2 are shown.
Fig. 3.2: A rectangular loop across a boundary
From Ampere's circuit law, we have
453423120150
dLH
113422
yxyy HxHy
Hy
H
IxHy
Hy
xy
2222

Field Theory 10ES36
Dept of ECE, SJBIT 63
As y 0, we get
IxHxHdLH xx 21
or,
sxx Jx
IHH
21
(3.11)
Here, Hxl and Hx2 are tangential components in medium 1 and 2, respectively.
So, Htan1 – Htan2 = Js (3.12)
Now consider a cylinder shown in Fig. 3.3.
Fig. 3.3: A differential cylinder across the boundary
Gauss's law for magnetic fields is
s
dSB 0 (3.13)
In this case, for y 0
s
yy
s
nyy
s
n adSaBadSaBdSB )(21 (3.14)
that is, Bn1 S - Bn2 S = 0
Therefore, Bnl = Bn2 (3.15)

Field Theory 10ES36
Dept of ECE, SJBIT 64
Problem 3:
Two homogeneous, linear and isotropic media have an interface at x = 0. x < 0 describes
medium 1 and x > 0 describes medium 2. r1 = 2 and r2 = 5. The magnetic field in medium 1
is 150ax - 400ay + 250az A/m.
Determine:
(a) Magnetic field in medium 2
(b) Magnetic flux density in medium 1
(c) Magnetic flux density in medium 2.
Solution:
The magnetic field in medium 1 is
H1 = 150ax - 400ay +250az A/m
Consider Fig. 3.4.
Fig. 3.4: Illustrative figure
(a) H1 = Htan1 + Hn1
Htanl = -400ay + 250az A/m
Hn1 = 150ax
The boundary condition is
Htanl = Htan2
Htan2 = - 400ay + 50az A/m
The boundary condition on B is Bn1 = Bn2
that is, 1 Hn1 = 1 Hn2
1
2
12 nn HH
xa150
5
2 = 60ax
H2 = Htan2 + Hn2

Field Theory 10ES36
Dept of ECE, SJBIT 65
(b) B1= 1 H1
= 0 r H1
=4 x 10-7
x 2(150ax - 400ay + 250az)
= (376.5ax - 1004ay + 627.5az) wb/m2
(c) B2 = 2 H2
= 4 x 10-7
x 5 (60ax - 400ay + 250az)
= (376.98ax - 2513.2ay +1570.75az)wb/m2
SCALAR MAGNETIC POTENTIAL
Like scalar electrostatic potential, it is possible to have scalar magnetic potential. It is defined in
such a way that its negative gradient gives the magnetic field, that is,
H = Vm (3.16)
Vm = scalar magnetic potential (Amp)
Taking curl on both sides, we get
x H = - x Vm (3.17)
But curl of the gradient of any scalar is always zero.
So, x H =0 (3.18)
But, by Ampere's circuit law X H = J
or, J = 0
In other words, scalar magnetic potential exists in a region where J = 0.
H = -Vm (J=0) (3.19)
The scalar potential satisfies Laplace's equation, that is, we have
.B = 0 .H = 0 = m (-Vm) = 0
or,
2 Vm = 0 (J = 0) (3.20)

Field Theory 10ES36
Dept of ECE, SJBIT 66
Characteristics of Scalar Magnetic Potential (Vm)
1. The negative gradient of Vm gives H, or H = -Vm
2. It exists where J = 0
3. It satisfies Laplac’s equation.
4. It is directly defined as
B
A
m dLHV
5. It has the unit of Ampere.
VECTOR MAGNETIC POTENTIAL
Vector magnetic potential exists in regions where J is present. It is defined in such a way that
its curl gives the magnetic flux density, that is,
B x A (3.21)
where A = vector magnetic potential (wb/m).
It is also defined as
m
AmpHenry
R
IdLA
4
0 (3.22)
or, ,4
0
s
R
KdsA
(K = current sheet) (3.23)
or, ,4
0
v
R
JdvA
(3.24)

Field Theory 10ES36
Dept of ECE, SJBIT 67
Characteristics of Vector Magnetic Potential
1. It exists even when J is present.
2. It is defined in two ways
B x A and
v
R
Jd
4
0
3. 2A = 0 j
4. 2A = 0 if J = 0
5. Vector magnetic potential, A has applications to obtain radiation characteristics of
antennas, apertures and also to obtain radiation leakage from transmission lines,
waveguides and microwave ovens.
6. A is used to find near and far-fields of antennas.
Problem 4:
The vector magnetic potential, A due to a direct current in a conductor in free space is given by
A = (X2 + Y
2) az wb /m
2. Determine the magnetic field produced by the current element at (1,
2, 3).
Solution:
A = (x2 +y
2) az wb/m
2
We have B = x A
22
6
00
10
yx
zyx
aaa zyx
62222 10
yx ayx
xayx
x
Field Theory 10ES36
Dept of ECE, SJBIT 68
622 1022 yx ayxayx
6104241)3,2,1(/ yx aaatB
61065 yx aa
6
0
10651 yx aaH
6
71065
104
1
yx aa
H = (3.978ax – 4.774ay), A/m
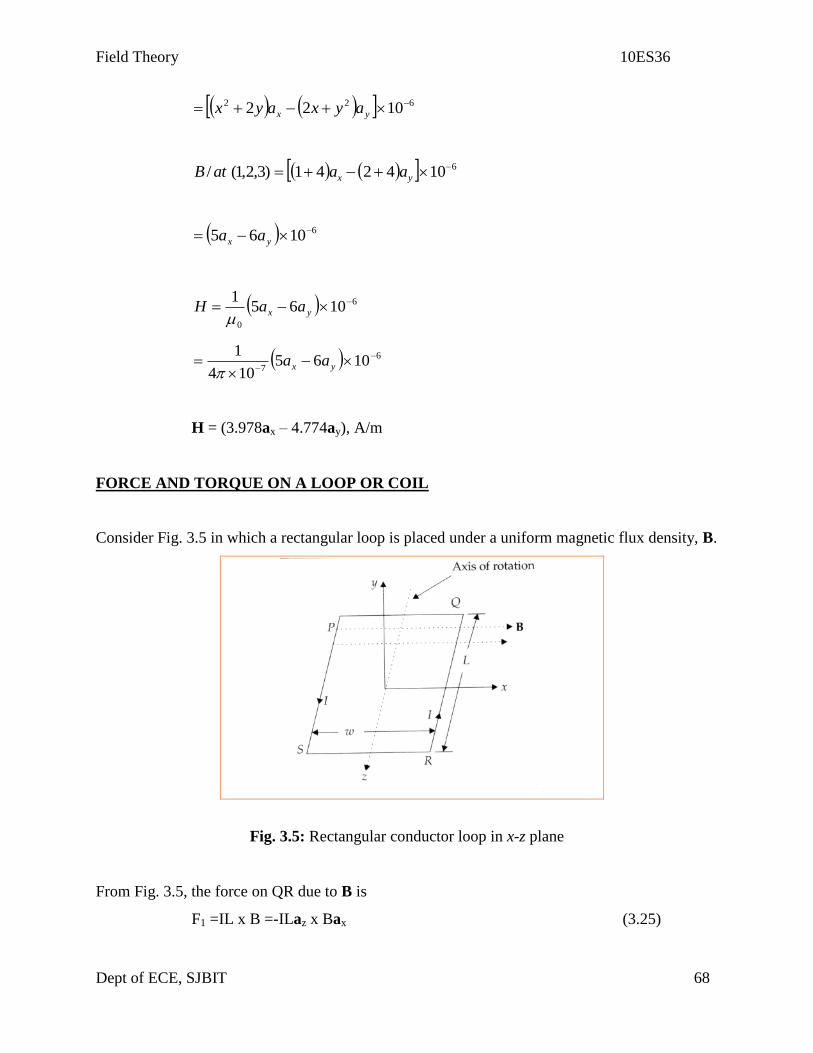
FORCE AND TORQUE ON A LOOP OR COIL
Consider Fig. 3.5 in which a rectangular loop is placed under a uniform magnetic flux density, B.
Fig. 3.5: Rectangular conductor loop in x-z plane
From Fig. 3.5, the force on QR due to B is
F1 =IL x B =-ILaz x Bax (3.25)

Field Theory 10ES36
Dept of ECE, SJBIT 69
F1 = -ILBay (3.26)
that is, the force, F1 on QR moves it downwards. Now the force on PS is
F2 = IL x B = -ILaz x Bax (3.27)
F2 = - ILBay (3.28)
Force, F2 on PS moves it upwards. It may be noted that the sides PQ and
SR will not experience force as they are parallel to the field, B.
The forces on QR and PS exert a torque. This torque tends to rotate the coil about its axis.
The torque, T is nothing but a mechanical moment of force. The torque on the loop is defined as
the vector product of moment arm and force,
that is,
T r x F, N-m (3.29)
where r = moment arm
F = force
Applying this definition to the loop considered above, the expression for
torque is given by
T = r1 x F1 + r2 x F2 (3.30)
)(2
)(2
yxyx ILBaaw
ILBaaw
(3.31)
= -BILwaz
or, T = -BISaz (3.32)
where S = wL = area of the loop

Field Theory 10ES36
Dept of ECE, SJBIT 70
The torque in terms of magnetic dipole moment, m is
T = m x B, N-m (3.34)
where m = I l w ay
= I S ay
Problem 5:
A rectangular coil is placed in a field of B = (2ax + ay) wb/m2. The coil is in y-z plane and has
dimensions of 2 m x 2 m. It carries a current of 1 A. Find the torque about the z-axis.
Solution:
m=IS an = 1 x 4ax
T = m x B = 4ax x (2ax + ay)
T = 4az, N-m
MATERIALS IN MAGNETIC FIELDS
A material, is said to be magnetic if m 0, r = 1
A material is said to be non-magnetic if m = 0, r = 1.
The term 'Magnetism' is commonly discussed in terms of magnets with basic examples like north
pole, compass needle, horse shoe magnets and so on.
Magnetic properties are described in terms of magnetic susceptibility and relative permeability of
the materials.

Field Theory 10ES36
Dept of ECE, SJBIT 71
Magnetic materials are classified into
1. Diamagnetic materials
2. Paramagnetic materials
3. Ferromagnetic materials
Diamagnetic Materials
A material is said to diamagnetic if its susceptibility, m < 0 and r 1.0.
Examples are copper, lead, silicon, diamond and bismuth.
Characteristics of diamagnetic materials
Magnetic fields due to the motion of orbiting electrons and spinning electrons cancel
each other.
Permanent magnetic moment of each atom is zero.
These materials are widely affected by magnetic field.
Magnetic susceptibility m is (-)ve.
r = 1
B = 0
Most of the materials exhibit diamagnetism.
They are linear magnetic materials.
Diamagnetism is not temperature dependent.
These materials acquire magnetisation opposite to H and hence they are called
diamagnetic materials.
Paramagnetic Materials
A material for which m > 0 and r 1 is said to be paramagnetic.
Examples are air, tungsten, potassium and platinum.
Field Theory 10ES36
Dept of ECE, SJBIT 72
Characteristics of paramagnetic materials
They have non-zero permanent magnetic moment.
Magnetic fields due to orbiting and spinning electrons do not cancel each other.
Paramagnetism is temperature dependent.
m lies between 10-5
and 10-3
.
These are used in MASERS.
m > 0
r 1
They are linear magnetic materials.
These materials acquire magnetisation parallel to H and hence they are called paramagnetic
materials.
Ferromagnetic Materials
A material for which m >> 0, r >> 1 is said to be ferromagnetic.
Examples are iron, nickel, cobalt and their alloys.
Characteristics of ferromagnetic materials
They exhibit large permanent dipole moment.
m >> 0
r >> l
They are strongly magnetised by magnetic field.
They retain magnetism even if the magnetic field is removed.
They lose their ferromagnetic properties when the temperature is raised.
If a permanent magnet made of iron is heated above its curie temperature, 770C, it loses
its magnetisation completely.
They are non-linear magnetic materials.
B = H does not hold good as depends on B.

Field Theory 10ES36
Dept of ECE, SJBIT 73
In these materials, magnetisation is not determined by the field present. It depends on the
magnetic history of the object.
INDUCTANCE
Inductor is a coil of wire wound according to various designs with or without a core of magnetic
material to concentrate the magnetic field.
Inductance, L In a conductor, device or circuit, an inductance is the inertial property caused by
an induced reverse voltage that opposes the flow of current when a voltage is applied. It also
opposes a sudden change in current that has been established.
Definition of Inductance, L (Henry):
The inductance, L of a conductor system is defined as the ratio of magnetic flux linkage to the
current producing the flux, that is,
)(HenryI
NL
(3.35)
Here N = number of turns
= flux produced
I = current in the coil
1 Henry l wb/Amp
L is also defined as (2WH/I2), or
2
2
I
WL H (3.36)
where, WH = energy in H produced by I.
In fact, a straight conductor carrying current has the property of inductance. Aircore coils are
wound to provide a few pico henries to a few micro henries. These are used at IF and RF
frequencies in tuning coils, interstage coupling coils and so on.

Field Theory 10ES36
Dept of ECE, SJBIT 74
The requirements of such coils are:
Stability of inductance under all operating conditions
High ratio inductive reactance to effective loss resistance at the operating freq
Low self capacitance
Small size and low cost
Low temperature coefficient
STANDARD INDUCTANCE CONFIGURATIONS
Toroid
It consists of a coil wound on annular core. One side of each turn of the coil is threaded through
the ring to form a Toroid (Fig. 3.6).
Fig. 3.6: Toroid
Inductance of Toroid, r
SNL
2
2
0 (3.37)
Here N = number of turns
r = average radius
S = cross-sectional area
Magnetic field in a Toroid, r
NIH
2 (3.38)
I is the current in the coil.

Field Theory 10ES36
Dept of ECE, SJBIT 75
Solenoid
It is a coil of wire which has a long axial length relative to its diameter. The coil is tubular in
form. It is used to produce a known magnetic flux density along its axis.
A solenoid is also used to demonstrate electromagnetic induction. A bar of iron, which is free to
move along the axis of the coil, is usually provided for this purpose. A typical solenoid is shown
in Fig. 3.7.
Fig. 3.7: Solenoid
The inductance, L of a solenoid is
l
SNL
2
0 (3.39)
l = length of solenoid
S = cross-sectional area
N = Number of turns
The magnetic field in a solenoid is
l
NIH (3.40)
I is the current

Field Theory 10ES36
Dept of ECE, SJBIT 76
RECOMMENDED QUESTIONS
1. Derive for force on a moving charge.
2. Derive for Lorentz force equation.
3. Derive for force between differential current elements.
4. Derive for force & torque on a closed circuit.
5. Discuss briefly about magnetic materials.
6. Discuss briefly about magnetic boundary conditions.

Field Theory 10ES36
Dept of ECE, SJBIT 77
UNIT – 6
TIME VARYING MAGNETIC FIELDS AND MAXWELLS EQUATIONS
Syllabus:
Faraday’s law, Displacement current, Maxwell’s equation in point and integral form, Retarded
potentials.
REFERENCE BOOKS:
1. Energy Electromagnetics, William H Hayt Jr . and John A Buck, Tata McGraw-Hill, 7th
edition,2006.
2. Electromagnetics with Applications, John Krauss and Daniel A Fleisch McGraw-Hill, 5th
edition, 1999
3. Electromagnetic Waves And Radiating Systems, Edward C. Jordan and Keith
G Balmain, Prentice – Hall of India / Pearson Education, 2nd
edition, 1968.Reprint
2002
4. Field and Wave Electromagnetics, David K Cheng, Pearson Education Asia, 2nd edition,
- 1989, Indian Reprint – 2001.
Introduction
Electrostatic fields are usually produced by static electric charges whereas magnetostatic fields
are due to motion of electric charges with uniform velocity (direct current) or static magnetic
charges (magnetic poles); time-varying fields or waves are usually due to accelerated charges or
time-varying current.
Stationary charges Electrostatic fields
Steady current Magnetostatic fields
Time-varying current Electromagnetic fields (or waves)
Faraday discovered that the induced emf, Vemf (in volts), in any closed circuit is equal to the time
rate of change of the magnetic flux linkage by the circuit

Field Theory 10ES36
Dept of ECE, SJBIT 78
This is called Faraday’s Law, and it can be expressed as
dt
dN
dt
dVemf
1.1
where N is the number of turns in the circuit and is the flux through each turn. The negative
sign shows that the induced voltage acts in such a way as to oppose the flux producing it. This is
known as Lenz’s Law, and it emphasizes the fact that the direction of current flow in the circuit
is such that the induced magnetic filed produced by the induced current will oppose the original
magnetic field.
Fig. 1 A circuit showing emf-producing field Ef and electrostatic field Ee
TRANSFORMER AND MOTIONAL EMFS
Having considered the connection between emf and electric field, we may examine how
Faraday's law links electric and magnetic fields. For a circuit with a single (N = 1), eq. (1.1)
becomes
dt
dNVemf
1.2
In terms of E and B, eq. (1.2) can be written as
SL
emf dSBdt
ddlEV 1.3
where, has been replaced by S
dSB and S is the surface area of the circuit bounded by the
closed path L. It is clear from eq. (1.3) that in a time-varying situation, both electric and
magnetic fields are present and are interrelated. Note that dl and dS in eq. (1.3) are in accordance
with the right-hand rule as well as Stokes's theorem. This should be observed in

Field Theory 10ES36
Dept of ECE, SJBIT 79
Figure 2. The variation of flux with time as in eq. (1.1) or eq. (1.3) may be caused in three ways:
1. By having a stationary loop in a time-varying B field
2. By having a time-varying loop area in a static B field
3. By having a time-varying loop area in a time-varying B field.
A. STATIONARY LOOP IN TIME-VARYING B FIELD (TRANSFORMER EMF)
This is the case portrayed in Figure 2 where a stationary conducting loop is in a time varying
magnetic B field. Equation (1.3) becomes
SL
emf dSt
BdlEV 1.4
Fig. 2: Induced emf due to a stationary loop in a time varying B field.
This emf induced by the time-varying current (producing the time-varying B field) in a stationary
loop is often referred to as transformer emf in power analysis since it is due to transformer
action. By applying Stokes's theorem to the middle term in eq. (1.4), we obtain
SS
dSt
BdSE 1.5
For the two integrals to be equal, their integrands must be equal; that is,
t
BE
1.6

Field Theory 10ES36
Dept of ECE, SJBIT 80
This is one of the Maxwell's equations for time-varying fields. It shows that the time varying E
field is not conservative ( x E 0). This does not imply that the principles of energy
conservation are violated. The work done in taking a charge about a closed path in a time-
varying electric field, for example, is due to the energy from the time-varying magnetic field.
B. MOVING LOOP IN STATIC B FIELD (MOTIONAL EMF)
When a conducting loop is moving in a static B field, an emf is induced in the loop. We recall
from eq. (1.7) that the force on a charge moving with uniform velocity u in a magnetic field B is
Fm = Qu x B 1.7
We define the motional electric field Em as
BuQ
FE m
m 1.8
If we consider a conducting loop, moving with uniform velocity u as consisting of a large
number of free electrons, the emf induced in the loop is
LL
memf dlBudlEV 1.9
This type of emf is called motional emf or flux-cutting emf because it is due to motional action.
It is the kind of emf found in electrical machines such as motors, generators, and alternators.
C. MOVING LOOP IN TIME-VARYING FIELD
This is the general case in which a moving conducting loop is in a time-varying magnetic field.
Both transformer emf and motional emf are present. Combining equation 1.4 and 1.9 gives the
total emf as
LL S
emf dlBudSt
BdlEV 1.10
BuEm 1.11
or from equations 1.6 and 1.11.
But
BE
1.12

Field Theory 10ES36
Dept of ECE, SJBIT 81
DISPLACEMENT CURRENT
For static EM fields, we recall that
x H = J 1.13
But the divergence of the curl of any vector field is identically zero.
Hence,
. ( x H) = 0 = . J 1.14
The continuity of current requires that
0
tJ v 1.15
Thus eqs. 1.14 and 1.15 are obviously incompatible for time-varying conditions. We must
modify eq. 1.13 to agree with eq. 1.15. To do this, we add a term to eq. 1.13, so that it becomes
x H = J + Jd 1.16
where Jd is to be determined and defined. Again, the divergence of the curl of any vector is zero.
Hence:
. ( x H) = 0 = . J + . Jd 1.17
In order for eq. 1.17 to agree with eq. 1.15,
t
DD
ttJJ v
d
1.18
or
t
DJ d
1.19
Substituting eq. 1.19 into eq. 1.15 results in
t
DJH
1.20
This is Maxwell's equation (based on Ampere's circuit law) for a time-varying field. The term Jd
= D/t is known as displacement current density and J is the conduction current density (J =
E)3.

Field Theory 10ES36
Dept of ECE, SJBIT 82
Fig. 3 Two surfaces of integration showing the need for Jd in Ampere’s circuit law
The insertion of Jd into eq. 1.13 was one of the major contribution of Maxwell. Without the term
Jd, electromagnetic wave propagation (radio or TV waves, for example) would be impossible. At
low frequencies, Jd is usually neglected compared with J. however, at radio frequencies, the two
terms are comparable. At the time of Maxwell, high-frequency sources were not available and
eq. 1.20 could not be verified experimentally.
Based on displacement current density, we define the displacement current as
dS
t
DdSJI dd 1.21
We must bear in mind that displacement current is a result of time-varying electric field. A
typical example of such current is that through a capacitor when an alternating voltage source is
applied to its plates.
PROBLEM: A parallel-plate capacitor with plate area of 5 cm2 and plate separation of 3 mm
has a voltage 50 sin 103 t V applied to its plates. Calculate the displacement current assuming =
2 0.
Solution:
d
VED
dt
dV
dt
DJ d
Hence,

Field Theory 10ES36
Dept of ECE, SJBIT 83
dt
dVC
dt
dV
d
SSJI dd
which is the same as the conduction current, given by
dt
dVC
dt
dV
d
S
dt
dES
dt
dDS
dt
dS
dt
dQI s
c
tI d
33
3
49
10cos5010103
105
36
102
= 147.4 cos 103 t nA
EQUATION OF CONTINUITY FOR TIME VARYING FIELDS
Equation of continuity in point form is
. J = -v
where,
J = conduction current density (A/M2)
P = volume charge density (C/M3),
t
v
v
= vector differential operator (1/m)
z
ay
ax
a zyx
Proof: Consider a closed surface enclosing a charge Q. There exists an outward flow of current
given by
S
dSJI
This is equation of continuity in integral form.
From the principle of conservation of charge, we have
dt
dQdSJI
S
From the divergence theorem, we have
vS
dJdSJI

Field Theory 10ES36
Dept of ECE, SJBIT 84
Thus, dt
dQdJ
By definition,
dQ
where , = volume charge density (C/m3)
So,
ddt
dJ.
where t
.
The volume integrals are equal only if their integrands are equal.
Thus, . J = - .
MAXWELL'S EQUATIONS FOR STATIC EM FIELDS
Differential (or
Point) Form Integral Form Remarks
. D = v S
v
vdvdSD Gauss's law
. B = 0 S
dSB 0 Nonexistence of magnetic
monopole
x E =-t
B
Ls
dSBt
dlE Faraday’s Law
x H = J + t
D
Ls
dSJdlH Ampere's circuit law
MAXWELL’S EQUATIONS FOR TIME VARYING FIELDS
These are basically four in number.
Maxwell's equations in differential form are given by
x H = t
D
+ J

Field Theory 10ES36
Dept of ECE, SJBIT 85
x E = -t
B
.D =
.B = 0
Here,
H = magnetic field strength (A/m)
D = electric flux density, (C/m2)
(D/t) = displacement electric current density (A/m2)
J = conduction current density (A/m 2
)
E = electric field (V/m)
B = magnetic flux density wb/m2 or Tesla
(B/t) = time-derivative of magnetic flux density (wb/m2 -sec)
B is called magnetic current density (V/m2) or Tesla/sec
P = volume charge density (C/m3)
Maxwell's equations for time varying fields in integral form are given by
L S
dSJDdLH.
L S
dSBdLE
S
ddSD
S
dSB 0
DEFINITIONS OF MAXWELL'S EQUATIONS
1. The first Maxwell's equation states that the magnetomotive force around a closed path is
equal to the sum of electric displacement and, conduction currents through any surface
bounded by the path.
2. The second law states that the electromotive force around a closed path is equal to the
inflow of magnetic current through any surface bounded by the path.
3. The third law states that the total electric displacement flux passing through a closed
surface (Gaussian surface) is equal to the total charge inside the surface.

Field Theory 10ES36
Dept of ECE, SJBIT 86
4. The fourth law states that the total magnetic flux passing through any closed surface is
zero.
MAXWELL’S EQUATIONS FOR STATIC FIELDS
Maxwell’s Equations for static fields are:
SL
dSJdLHJH
00 L
dLEE
ddSDDS
00 S
dSBB
As the fields are static, all the field terms which have time derivatives are zero, that is, t
D
= 0,
t
B
= 0.
PROOF OF MAXWELLS EQUATIONS
1. From Ampere's circuital law, we have
x H = J
Take dot product on both sides
. x H = . J
As the divergence of curl of a vector is zero,
RHS = . J = 0
But the equation of continuity in point form is
tJ
This means that if x H = J is true, it is resulting in . J = 0.
As the equation of continuity is more fundamental, Ampere's circuital law
should be modified. Hence we can write

Field Theory 10ES36
Dept of ECE, SJBIT 87
x H = J + F
Take dot product on both sides
. x H = . J + . F
that is, . x H = 0 = . J + . F
Substituting the value of .J from the equation of continuity in the above
expression, we get
. F + (-) = 0
or, . F = -
The point form of Gauss's law is
. D =
or, . D =
From the above expressions, we get
. F = . D
The divergence of two vectors are equal only if the vectors are identical,
that is, F = D
So, x H = D + J
Hence proved.
2. According to Faraday's law,
dt
demf
= magnetic flux, (wb)
and by definition,
L
dLEemf
dt
ddLE
L
But S
dSB
SL
dSt
BdLE

Field Theory 10ES36
Dept of ECE, SJBIT 88
St
BBdSB ,
Applying Stoke's theorem to LHS, we get
SL
dSEdLE
S S
dSBdSE
Two surface integrals are equal only if their integrands are equal,
that is, x E = - B
Hence proved.
3. From Gauss's law in electric field, we have
dQdSDS
Applying divergence theorem to LHS, we get
ddDdSDS
Two volume integrals are equal if their integrands are equal,
that is, . D =
Hence proved.
4. We have Gauss's law for magnetic fields as
S
dSB 0
RHS is zero as there are no isolated magnetic charges and the magnetic flux lines are closed
loops.
Applying divergence theorem to LHS, we get
0dB
or,
. B = 0 Hence proved.
PROBLEM 1:
Given E = 10 sin (t - y) ay V/m, in free space, determine D, B and H.

Field Theory 10ES36
Dept of ECE, SJBIT 89
Solution:
E = 10 sin (t - y) ay, V/m
D = 0 E, 0 = 8.854 x 10-12
F/m
D = 100 sin (t - y) ay, C/m2
Second Maxwell’s equation is
x E = -B
That is,
00 y
zyx
E
zyx
aaa
E
or,
yzyx E
xaE
zaE 0
As Ey = 10 sin (t - z) V/m
0
x
E y
Now, x E becomes
x
ya
z
EE
= 10 cos (t - z) ax
t
B
xadtztB cos10
or 2/,sin10
mwbaztB z
and mAaztB
H z /,sin10
00

Field Theory 10ES36
Dept of ECE, SJBIT 90
PROBLEM 2: If the electric field strength, E of an electromagnetic wave in free space is given
by E = 2 cos ya
zt
0 V/m, find the magnetic field, H.
Solution: We have
B/t = - x E
00 y
zyx
E
zyx
aaa
yzyyx E
xaaE
za )0(
x
ya
z
E
xaz
t
00
sin2
xadt
ztB
00
sin2
or, xaz
tB
00
cos2
or, xaz
tB
H
0000
cos2
120
0
00
Thus, xaz
tH
00
cos2
00
0
1
mAaz
tH x /cos60
1
0
PROBLEM 3: If the electric field strength of a radio broadcast signal at a TV receiver is given
by
E = 5.0 cos (t - y) az, V/m,

Field Theory 10ES36
Dept of ECE, SJBIT 91
determine the displacement current density. If the same field exists in a medium whose
conductivity is given by 2.0 x 103 (mho)/cm, find the conduction current density.
Solution:
E at a TV receiver in free space
= 5.0 cos (t - y) az, V/m
Electric flux density
D = 0 E = 5 0 cos (t - y) az, V/m
The displacement current density
t
DDJ d
zaytt
cos5 0
Jd = -50 sin (t - y) az, V/m2
The conduction current density,
Jc = E
= 2.0 x 103 (mho) /cm
= 2 x 105 mho /m
Jc = 2 x 105 x 5 cos (t - y) az
Jc = 106 cos (t - y) az V/m
2
RECOMMENDED QUESTIONS
1. From faraday’s law, show that EMF= -N dΦ/dt
2. Derive for displacement current.
3. Prove that displacement current is equal to conduction current.
4. Write Maxwell’s equation in point form.
5. Write Maxwell’s equation in integral form.
Field Theory 10ES36
Dept of ECE, SJBIT 92
UNIT – 7
UNIFORM PLANE WAVES
Syllabus:
Wave propagation in free space and dielectrics, Poynting’s theorem and wave power,
Propagation in good conductors – (skin effect)
REFERENCE BOOKS:
1. Energy Electromagnetics, William H Hayt Jr . and John A Buck, Tata McGraw-Hill, 7th
edition,2006.
2. Electromagnetics with Applications, John Krauss and Daniel A Fleisch McGraw-Hill, 5th
edition, 1999
3. Electromagnetic Waves And Radiating Systems, Edward C. Jordan and Keith
G Balmain, Prentice – Hall of India / Pearson Education, 2nd
edition, 1968.Reprint
2002
4. Field and Wave Electromagnetics, David K Cheng, Pearson Education Asia, 2nd edition,
- 1989, Indian Reprint – 2001.
Sinusoidal Time Variations:
In practice, most generators produce voltage and currents and hence electric and magnetic
fields which vary sinusoidally with time. Further, any periodic variation can be represented
as a weight sum of fundamental and harmonic frequencies.
Therefore we consider fields having sinusoidal time variations, for example,
E = Em cos t
E = Em sin t
Here, w = 2f, f = frequency of the variation.
Therefore every field or field component varies sinusoidally, mathematically by an additional
term. Representing sinusoidal variation. For example, the electric field Er
can be represented
as
, , ,
., , ; , ,
E x y z t as
ie E r t r x y z
r
r r r%

Field Theory 10ES36
Dept of ECE, SJBIT 93
Where Er%
is the time varying field.
The time varying electric field can be equivalently represented, in terms of corresponding
phasor quantity Er%
(r) as
, ________ (11)j t
eE r t R E r e
r rr%
The symbol ‘tilda’ placed above the E vector represents that Er
is time – varying quantity.
The phasor notation:
We consider only one component at a time, say Ex.
The phasor Ex is defined by
, ________ (12)j t
x e xE r t R E r e r%
xE rr
denotes Ex as a function of space (x,y,z). In general xE rr
is complex and hence can be
represented as a point in a complex and hence can be represented as a point in a complex plane.
(see fig) Multiplication by jwte results in a rotation through an angle wt measured from the angle
. At t increases, the point Ex jwte traces out a circle with center at the origin. Its projection on
the real axis varies sinusoidally with time & we get the time-harmonically varying electric field
Ex% (varying sinusoidally with time). We note that the phase of the sinusoid is determined by ,
the argument of the complex number Ex.
Therefore the time varying quantity may be expressed as
________ (13)
cos( ) ________ (14)
j j t
x e x
x
E R E e e
E t
%

Field Theory 10ES36
Dept of ECE, SJBIT 94
Maxwell’s eqn. in phasor notation:
In time – harmonic form, the Maxwell’s first curl eqn. is:
_______ (15)D
H Jt
r%r r% %
using phasor notation, this eqn. becomes,
________ (16)j t j t j t
e e eR He R De R Jet
r r r
The diff. Operator & Re part operator may be interchanged to get,
0
j t j t j t
e e e
j t j t
e e
j t
e
R He R De R Jet
R j D e R Je
R H j D J e
r r r
r r
r r r
This relation is valid for all t. Thus we get
________ (17)H J j D r r r
This phasor form can be obtained from time-varying form by replacing each time derivative by
.,jw ie is to be replaced byt
For the sinusoidal time variations, the Maxwell’s equation may be expressed in phasor form as:
(17)
(18)
(19)
(20) 0 0
LS
LS
V VS
V
S
H J j D H dL J j D ds
E j B E dl j B ds
D D ds d
B B ds
r r r r r r rg g
rr r r r rg g
r r rg g
r r rg g
Ñ
Ñ
Ñ
Ñ
The continuity eqn., contained within these is,
_______ (21)S
vol
J j J ds j dv r r r
g gÑ

Field Theory 10ES36
Dept of ECE, SJBIT 95
The constitutive eqn. retain their forms:
D E
B H
J E
r r
r r
r r____ (22)
For sinusoidal time variations, the wave equations become
2 2
2 2
( )
( )
E E for electric field
H H for electric field
r r
r r _________ (23)
Vector Helmholtz eqn.
In a conducting medium, these become
2 2
2 2
0
0
E j E
H j H
r r
r r ________ (24)
Wave propagation in a loss less medium:
In phasor form, the wave eqn. for VPW is
222
22
2
2
1 2
; _______ (25)
_______ (26)
y
y
j x j x
y
EEE
Exx
E
E C e C e
rr
r
C1 & C2 are arbitrary constants.
The corresponding time varying field is
1 2
1 2
,
______ (27)
cos cos ______ (28)
j t
y e y
t z t zj j
e
E x t R E x e
R C e C e
C t z C t z
%
When C1 and C2 are real.
Therefore we note that, in a homogeneous, lossless medium, the assumption of sinusoidal time
variations results in a space variation which is also sinusoidal.
Eqn. (27) and (28) represent sum of two waves traveling in opposite directions.

Field Theory 10ES36
Dept of ECE, SJBIT 96
If C1 = C2 , the two traveling waves combine to form a simple standing wave which does not
progress.
If we rewrite eqn. (28) with Ey as a fn of (x-t),
we get =
Let us identify some point in the waveform and observe its velocity; this point is
t x a constant
Then
' 'a t
dx x
dt t
Q
This velocity is called phase velocity, the velocity of a phase point in the wave.
is called the phase shift constant of the wave.

Field Theory 10ES36
Dept of ECE, SJBIT 97
Wavelength: These distance over which the sinusoidal waveform passes through a full cycle of
2 radians
ie.,
0
2
2 2
2
;
1:
Z
or
But
f
or
f f in H
Wave propagation in a conducting medium
We have,
Where
2 2
2 2
0E E
j
j j
r r
is called the propagation constant is, in general, complex.
Therefore, = + j
= Attenuation constant
= phase shift constant.
The eqn. for UPW of electric field strength is
2
2
2
EE
x
rr
One possible solution is
0
xE x E e r
Therefore in time varying form, we get

Field Theory 10ES36
Dept of ECE, SJBIT 98
0
, x j t
e
x jwt
e
E x t R E e e
e R E e
r%
This eqn. shown that a up wave traveling in the +x direction and attenuated by a factor xe .
The phase shift factor
2
and velocity f
= Real part of = RP j j t
=
2
2 2
2
2 2
1 12
1 12
Conductors and dielectrics:
We have the phasor form of the 1st Maxwell’s curl eqn.
c dispH E j E J J r r r
where cJ E r
conduction current density ( A/m2 )
dispJ j E r
displacement current density ( A/m2 )
cond
disp
J
J
We can choose a demarcation between dielectrics and conductors;
1
* 1
is conductor. Cu: 3.5*10
8 @ 30 GHz
* 1
is dielectric. Mica: 0.0002 @ audio and RF
* For good conductors, & are independent of freq.

Field Theory 10ES36
Dept of ECE, SJBIT 99
* For most dialectics, & are function of freq.
*
is relatively constant over frequency range of interest
Therefore dielectric “ constant “
*
dissipation factor D
if D is small, dissipation factor is practically as the power factor of the dielectric.
PF = sin
= tan-1
D
PF & D difference by <1% when their values are less than 0.15.
Example
a) Express
6 0
8 0
2 10 0.5 30
100 cos 2 10 0.5 30 /
100
y
j t z
y e
E t z v m as a phasor
E R e
Drop Re and suppress ejwt
term to get phasor
Therefore phasor form of Eys = 00.5 30100 ze
Whereas Ey is real, Eys is in general complex.
Note: 0.5z is in radians; 030 in degrees.
Example 11.2
Given
0 0 0ˆ ˆ ˆ100 30 20 50 40 210 , /sE ax ay az V m r
find its time varying form representation
Let us rewrite sEr
as

Field Theory 10ES36
Dept of ECE, SJBIT 100
0 0 0
0 0 0
30 50 210
30 50 210
0 0 0
ˆ ˆ ˆ100 20 40 . /
100 20 40 /
100 cos 30 20 cos 50 40 cos 210 /
j j j
s
j t
e s
j t j t j t
e
E e ax e ay e az V m
E R E e
R e e e V m
E t t t V m
r
r%
r%
None of the amplitudes or phase angles in this are expressed as a function of x,y or z.
Even if so, the procedure is still effective.
b) Consider
0.1 20
0.1 20
0.1
ˆ20 /
ˆ20
ˆ20 cos 20 /
, ,
: , ,
j z
j z
s
j t
e
z
x x
j txe x
j t
e x
H e ax A m
H t R e ax e
e t z ax A m
E E x y z
ENote consider R E x y z e
t t
R j E e
r%
Therefore taking the partial derivative of any field quantity wrt time is equivalent to multiplying
the corresponding phasor by j .
Example
Given
0 0.4
0ˆ ˆ500 40 200 600 /
2,3,1 0
2,3,1 10 .
3,4,2 20 .
j x
sE ay j az e V m
Find a
b E at at t
c E at at t ns
d E at at t ns
r
r
r
r

Field Theory 10ES36
Dept of ECE, SJBIT 101
a) From given data,
0 0
86
97
9
6
0.4
0.4 3 10120 10
104 10
36
19.1 10f Hz
b) Given,
0
0 0
0 0
0 0.4
40 0.4 71.565 0.4
0.4 40 0.4 71.565
0.4 40 0.4 71.565
ˆ ˆ500 40 200 600
ˆ ˆ500 632.456
ˆ ˆ500 632.456
ˆ ˆ500 632.456
500 cos 0
j x
s
j j x j j x
j x j x
j x j xj t j t
e
E ay j az e
e e ay e e az
e ay e az
E t R e e ay e e az
t
r
r
0
0
ˆ ˆ.4 40 632.456 cos 0.4 71.565
ˆ ˆ2,3,1 0 500 cos 0.4 40 632.456 0.4 71.565
ˆ ˆ36.297 291.076 /
x ay t x az
E at t x ay x az
ay az V m
r
c)
6 9 0
6 9 0
10 2,3,1
ˆ500 cos 120 10 10 10 0.4 2 40
ˆ632.456 cos 120 10 10 10 0.4 2 71.565
ˆ ˆ477.823 417.473 /
E at t ns at
ay
az
ay az V m
r
d)
at t = 20 ns,
2,3,1
ˆ ˆ438.736 631.644 /
E at
ay az V m
r

Field Theory 10ES36
Dept of ECE, SJBIT 102
Example:
Given 0 0.07ˆ ˆ2 40 3 20 /j z
sH ax ay e A m r
for a UPW traveling in free space. Find
(a) (b) Hx at p(1,2,3) at t = 31 ns. (c) Hr
at t=0 at the origin.
(a) we have p = 0.07 ( )j ze term
8 6
6
0.07
0.070.07 3 10 21.0 10 / sec
21.0 10 / sec
rad
rad
(b)
0 040 0.07 20 0.07
0 0
0
6 0
6 9 0
3
ˆ ˆ2 3
ˆ ˆ2 cos 0.07 40 3 cos 0.07 20
( ) 2cos 0.07 40
( ) 1,2,3
2cos 2.1 10 0.21 40
31 sec; 2cos 2.1 10 31 10 0.21 40
2cos 651 10
j j z j j z j t
e
x
x
H t R e e ax e e ay e
t z ax t z ay
H t t z
H t at p
t
At t n
r
00.21 40
1.9333 /A m
(c)
ˆ ˆ0 2cos 0.07 0.7 3cos 0.7 0.35
ˆ ˆ2cos 0.7 3cos 0.3
ˆ ˆ1.53 2.82
3.20666 /
H t at t z ax z ay
H t ax ay
ax ay
A m
r
r
In free space,

Field Theory 10ES36
Dept of ECE, SJBIT 103
ˆ, 120sin /
,
120
120ˆsin
120 120
1sin
1ˆ, sin
y
x
y
x
E z t t z ay V m
find H z t
Ewe have
H
EH t z ay
t z
H z t t z ax
r
Problem 3:
Non uniform plans waves also can exist under special conditions. Show that the function
sinzF e x t
satisfies the wave equation 2
2
2 2
1 FF
c t
provided the wave velocity is given by
2 2
21
ce
Ans:
From the given eqn. for F, we note that F is a function of x and z,
2 22
2 2
2 2
2 2
22 2
2
cos
sin
sin
sin
z
zz
z
z
F FF
x y
Fe x t
x
F ee x t F
x
Fe x t
z
Fe x t F
z

Field Theory 10ES36
Dept of ECE, SJBIT 104
22 2
2
2
2
2
cos
sin
z
z
F F
dFe x t
dt
d Fe x t
dt
F
The given wave equation is
22
2 2
22 2
2 2
2 22
2 2
2 22
2 2
22
22
2
2 2 22
2 22 2 2
2
2 2
2
1
1
1
1
FF
c t
F Fc
c
c
c
c c
cc
cor
c
Example
The electric field intensity of a uniform plane wave in air has a magnitude of 754 V/m and is
in the z direction. If the wave has a wave length = 2m and propagating in the y direction.
Find
(i) Frequency and when the field has the form cosA t z .
(ii) Find an expression for Hr
.

Field Theory 10ES36
Dept of ECE, SJBIT 105
In air or free space,
83 10 / secc m
(i)
88
6
3 10/ sec 1.5 10 150
2
2 23.14 /
2
754cos 2 150 10z
ef m Hz MHz
m
rad mm
E t y
(iii) For a wave propagating in the +y direction,
xz
z z
EE
H H
For the given wave,
6
754 / ; 0
754 754754 /
120 377
ˆ2cos 2 150 10 /
z x
x
E V m E
H A m
H t y ax A m
r
Example
find for copper having = 5.8*107 (/m) at 50Hz, 3MHz, 30GHz.
7 7
3
2 2
33
35
6
37
6
2 1
1 1 1 1
4 10 5.8 10
1 1 1 66 10
4 5.8 23.2
66 10( ) 9.3459 10
50
66 10( ) 3.8105 10
3 10
66 10( ) 3.8105 10
3 10
f
f
f f f
i m
ii m
iii m

Field Theory 10ES36
Dept of ECE, SJBIT 106
Wave Propagation in a loss less medium:
Definition of uniform plane wave in Phasor form:
In phasor form, the uniform plane wave is defined as one for which the equiphase surface is
also an equiamplitude surface, it is a uniform plane wave.
For a uniform plane wave having no variations in x and y directions, the wave equation in
phasor form may be expressed as
2 22 2
2 20 ________ ( )
E EE r E i
Z Z
r rr r
where . Let us consider eqn.(i) for, the Ey component, we get
2
2
2
y
y
EE
Z
yE has a solution of the form,
1 2 ________ (2)j z j z
yE C e C e
Where C1 and C2 are arbitrary complex constants. The corresponding time varying form of
yE is
1 2
,
_______ (3)
j t
y e y
j z j z j t
e
E z t R E z e
R C e C e e
%
If C1 and C2 are real, the result of real part extraction operation is,
1 2, cos cos _______ (4)yE z t C t z C t z
From (3) we note that, in a homogeneous lossless medium, sinusoidal time variation results
in space variations which is also sinusoidal.
Equations (3) and (4) represent sum of two waves traveling in opposite directions.
If C1 = C2, the two wave combine to form a standing wave which does not progress.
Phase velocity and wavelength:
The wave velocity can easily obtained when we rewrite Ey as a function and z t , as in
eqn. (4). This shows that

Field Theory 10ES36
Dept of ECE, SJBIT 107
________(5)
In phasor form, identifying a some reference point on the waveform and observing its
velocity may obtain the same result. For a wave traveling in the +Z direction, this point is
given by t z a constant.
dz
dt
, as in eqn. (5)
This velocity of some point on the sinusoidal waveform is called the phase velocity. is
called the phase-shift constant and is a measure of phase shift in radians per unit length.
Wavelength: Wavelength is defined as that distance over which the sinusoidal waveform
passes through a full cycle of 2 radius.
ie.,
2
2 2 2 1; ________(7)
2
, ________(8)
ff
f f in Hz
For the value of given in eqn. (1), the phase velocity is,
0
8
0
1_______(9)
; 3 10 / secC C m
Wave propagation in conducting medium:
The wave eqn. written in the form of Helmholtz eqn. is
2 2
2 2
0 _______(10)
_______(11)
E E
where j j j
r r
.
, the propagation constant is complex = + j _________(12)
We have, for the uniform plane wave traveling in the z direction, the electric field Er
must
satisfy

Field Theory 10ES36
Dept of ECE, SJBIT 108
22
2_______(13)
EE
Z
rr
This equation has a possible solution
0 _______(14)ZE Z E e r
In time varying form this is becomes
0, _______(15)Z j t
eE z t R E e e r%
= 0 ________(16)
j t zz
ee R E e
This is the equation of a wave traveling in the +Z direction and attenuated by a factor Ze .
The phase shift factor and the wavelength phase, velocity, as in the lossless case, are given
by
2f
The propagation constant
We have, ________(11)j j
22 2 2 22 ________(17)j j j
2 2 2 2 2 2; ________(18)
________(19)2
Therefore (19) in (18) gives:

Field Theory 10ES36
Dept of ECE, SJBIT 109
2
2 2
4 2 2 2 2 2
2 2 24 2 2
2 4 2 2 2 2 2
2
2 22 2
2
2 2 2
2 2
2
2 2
2
2 2
4
4 4 0
04
2
1
2
1 12
1 1 _________(20)2
1 1 _______2
and
____(21)
We choose some reference point on the wave, the cosine function,(say a rest). The value of
the wave ie., the cosine is an integer multiple of 2 at erest.
0 2k z m at mth
erest.
Now let us fix our position on the wave as this mth
erest and observe time variation at this
position, nothing that the entire cosine argument is the same multiple of 2 for all time in
order to keep track of the point.
ie., 0 0 2 /t k z m t z c
Thus at t increases, position z must also increase to satisfy eqn. ( ). Thus the wave erest (and
the entire wave moves in a +ve direction) with a speed given by the above eqn.

Field Theory 10ES36
Dept of ECE, SJBIT 110
Similarly, eqn. ( ) having a cosine argument 0t z describes a wave that moves in the
negative direction (as + increases z must decrease to keep the argument constant). These two
waves are called the traveling waves.
Let us further consider only +ve z traveling wave:
We have
ˆˆ ˆ
0 0
0x y
i j k
x y z
E E
0 0
0 0
0
00 0
0
00 0
0
0
ˆ
1
, cos
; 377 120
s s
y xy
xsy
jk z j z
oy z x
y x
x
y
E j H
E Ei j k j iH x j b
z z
Ej H
z
H E e E ej
H z t E t z
E
H
r r
Ey and Hx are in phase in time and space. The UPW is called so because is uniform thought
any plane Z = constant.
Energy flow is in +Z direction.
E and H are perpendicular to the direction of propagation; both lie in a plane that is
transverse to the direction of propagation. Therefore also called a TEM wave.
Example: The electric field amplitude of a UPW in the az direction is 250 V/m. If Er
=
ˆxE ax and = 1m rad/sec, find (i) f (ii) (iii) period (iv) amplitude of H
r.

Field Theory 10ES36
Dept of ECE, SJBIT 111
62 10159.155
2 2 2
1.88495
16.283
120
2500.6631 /
120 120
xy
y
xy
ff KHz
Ckm
f
period sf
Eamplitude of H
H
EH A m
11.2. Given 0 0 0.07ˆ ˆ2 40 3 20 /j z
sH ax ay e A m r
for a certain UPW traveling in free
space.
Find (i), (ii)Hx at p(1,2,3) at t = 31ns and (iii) Hr
at t = 0 at the orign.
Wave propagation in dielectrics:
For an isotopic and homogeneous medium, the wave equation becomes
2 2
0 0
s s
r r r r
E k
k k
r
For Ex component
We have
22
2
xsxs
d Ek E
dz for Ex comp. Of electric field wave traveling in Z – direction.
k can be complex one of the solutions of this eqn. is,
0
z j z
xs x
jk j
E E e e
Therefore its time varying part becomes,
Field Theory 10ES36
Dept of ECE, SJBIT 112
0 cosz
xs xE E e t z
This is UPW that propagates in the +Z direction with phase constant but losing its amplitude
with increasing zZ e . Thus the general effect of a complex valued k is to yield a traveling
wave that changes its amplitude with distance.
If is +ve = attenuation coefficient if is +ve wave decays
If is -ve = gain coefficient wave grows
In passive media, is +ve is measured in repers per meter
In amplifiers (lasers) is –ve.
Wave propagation in a conducting medium for medium for time-harmonic
fields: (Fields with sinusoidal time variations)
For sinusoidal time variations, the electric field for lossless medium ( = 0) becomes
2 2E E r r
In a conducting medium, the wave eqn. becomes for sinusoidal time variations:
2 2 0E j E r r
Problem:
Using Maxwell’s eqn. (1) show that
. 0D r
in a conductor
if ohm’s law and sinusoidal time variations are assumed. When ohm’s law and sinusoidal time
variations are assumed, the first Maxwell’s curl equation is
H E j E r r r
Taking divergence on both sides, we get,
0
0
0
, &
H E j E
E j
or D j
are
r r rg g
rg
rg
constants and of finite values and 0

Field Theory 10ES36
Dept of ECE, SJBIT 113
0D r
g
POLARISATION:
It shows the time varying behavior of the electric field strength vector at some point in space.
Consider of a UPW traveling along Z direction with Er%
and Hr%
vectors lying in the x-y plane.
If 0Ey % and only Ex% is present, the wave is said to be polarized in the x-direction.
If Ex% = 0 and only Ey% is present, the wave is said to be polarized in the y-direction.
Therefore the direction of Er
is the direction of polarization
If both Ex% and Ey% are present and are in phase, then the resultant electric field Er
has a
direction that depends on the relative magnitudes of Ex% and Ey% .
The angle which this resultant direction makes with the x axis is tan-1
Ey
Ex
%
%; and this angle will be
constant with time.
(a) Linear polarization:
In all the above three cases, the direction of the resultant vector is constant with time and the
wave is said to be linearly polarized.
If Ex% and Ey% are not in phase ie., they reach their maxima at different instances of time, then
the direction of the resultant electric vector will vary with time. In this case it can be shown that
the locus of the end point of the resultant Er%
will be an ellipse and the wave is said to be
elliptically polarized.
In the particular case where Ex% and Ey% have equal magnitudes and a 900 phase difference, the
locus of the resultant Er%
is a circle and the wave is circularly polarized.
Linear Polarisation:
Consider the phasor form of the electric field of a UPW traveling in the Z-direction:
0
j zE Z E e r
Its time varying or instanious time form is
0, j z j t
eE Z t R E e e r%

Field Theory 10ES36
Dept of ECE, SJBIT 114
The wave is traveling in Z-direction.
Therefore zE
r lies in the x-y plane. In general,
0Er
is a complex vector ie., a vector whose
components are complex numbers.
Therefore we can write 0Er
as,
0 0r iE E jE r r r
Where 0Er
and 0iE
r are real vectors having, in general, different directions.
At some point in space, (say z = 0) the resultant time varying electric field is
0 0
0 0
0,
cos sin
j t
e r i
r i
E t R E j E e
E t E t
r r r%
r r
Therefore Er
not only changes its magnitude but also changes its direction as time varies.
Circular Polarisation:
Here the x and y components of the electric field vector are equal in magnitude.
If Ey leads Ex by 900 and Ex and Ey have the same amplitudes,
Ie., x yE E , we have, 0ˆ ˆE ax j ay E
r%
The corresponding time varying version is,
0
0
0
2 2 2
0
ˆ ˆ0, cos sin
cos
sin
x
y
x y
E t ax t ay t E
E E t
and E E t
E E E
r r%
Which shows that the end point of 0 0,E tr%
traces a circle of radius 0E as time progresses.
Therefore the wave is said to the circularly polarized. Further we see that the sense or direction
of rotation is that of a left handed screw advancing in the Z-direction ( ie., in the direction of
propagation). Then this wave is said to be left circularly polarized.
Similar remarks hold for a right-circularly polarized wave represented by the complex vector,
0ˆ ˆE ax j ay E
r%

Field Theory 10ES36
Dept of ECE, SJBIT 115
It is apparent that a reversal of the sense of rotation may be obtained by a 1800 phase shift
applied either to the x component of the electric field.
Elliptical Polarisation:
Here x and y components of the electric field differ in amplitudes x yE E% % .
Assume that Ey leads Ex by 900.
Then,
0ˆ ˆE ax A j ay B
Where A and B are +ve real constants.
Its time varying form is
22
2 2
ˆ ˆ0, cos sin
cos
sin
1
x
y
yx
E t axA t ayB t
E A t
E B t
EE
A B
r%
%
%
%%
Thus the end point of the 0,E tr%
vector traces out an ellipse and the wave is elliptically
polarized; the sense of polarization is left-handed.
Elliptical polarization is a more general form of polarization. The polarization is completely
specified by the orientation and axial ratio of the polarization ellipse and by the sense in which
the end point of the electric field moves around the ellipse.

Field Theory 10ES36
Dept of ECE, SJBIT 116
RECOMMENDED QUESTIONS
1. Give the general equation of electromagnetic wave.
2. Derive for Characteristic impedance.
3. Derive equation of uniform Plane wave propagating in free space.
4. Derive equation of uniform Plane wave propagating in perfect dielectric.
5. Derive equation of uniform Plane wave propagating in general medium.
6. Define skin effect.
7. Define skin depth & bring out the relationship between skin depth & frequency.
8. State and prove Poynting theorem.
9. Define Poynting vector.
10. Derive for intrinsic impedance in case of general medium.

Field Theory 10ES36
Dept of ECE, SJBIT 117
UNIT – 8
PLANE WAVES AT BOUNDARIES AND IN DISPERSIVE MEDIA
Syllabus:
Reflection of uniform plane waves at normal incidence, SWR, Plane wave propagation in
general directions
REFERENCE BOOKS:
1. Energy Electromagnetics, William H Hayt Jr . and John A Buck, Tata McGraw-Hill, 7th
edition,2006.
2. Electromagnetics with Applications, John Krauss and Daniel A Fleisch McGraw-Hill, 5th
edition, 1999
3. Electromagnetic Waves And Radiating Systems, Edward C. Jordan and Keith
G Balmain, Prentice – Hall of India / Pearson Education, 2nd
edition, 1968.Reprint
2002
4. Field and Wave Electromagnetics, David K Cheng, Pearson Education Asia, 2nd edition,
- 1989, Indian Reprint – 2001.
.
Reflection of uniform plane waves at normal incidence:
Reflection of uniform plane waves occurs due to mismatch between the characteristic parameters
of the 2 medium.
When a uniform plane plane wave is incident on the boundary between regions composed of 2
different materials, it is partially reflected & partially transmitted. Consider an interface between
region1 and region 2 as shown in the fig 8.1.
We assume that, we have only a single vector component of electric field intensity As shown in
figure, we define region 1, as the half space for which z<0 and region 2 is the other half-space
for which z>0.
Initially, we assume that, wave in a region 1 is travelling in +z direction and linearly polarized
along x. Then the time varying electric field in the x-direction is given by,
in phasor form,

Field Theory 10ES36
Dept of ECE, SJBIT 118
In the equation (1) and (2) subscript 1 identifies the terms are related to region 1 and superscript
+ indicates a positively travelling wave.
Then magnetic field associated E+ (z)is given by,
This uniform plane wave in region 1 that is travelling toward the boundary surface at z=0 is
called the incident wave. Since the direction of propagation of the incident wave is perpendicular
to the boundary plane, therefore it is called as normal incidence.
Next we visualize that the energy may be transmitted across the boundary surface at z=0 into
region 2 or it may be reflected back to the region 1 itself. We let the case of transmitted energy
by letting the wave moving in +ve z-direction and the case of reflected energy is due to the wave
moving in –ve z-direction.
For the transmitted energy, the phasor electric and magnetic fields are given as,
This wave which moves away from the boundary surface into region 2 is called the transmitted
wave.

Field Theory 10ES36
Dept of ECE, SJBIT 119
Then, a wave travelling away from the boundary in region 1 as shown in figure, in the -ve z-
direction is called as reflected wave as it is directed back to region 1.
Therefore electric & magnetic field quantities of this reflected wave are given as,
Then these quantities to be true, these must satisfy boundary conditions at z=0. In the process,
the tangential electric fields in the region 1 and region 2 must become equal and also H is being
y-directed is also a tangential must be continuous across the boundary. These can be verified
easily by letting z=0 in the above field components.
The total electric field intensity in region 1 and in the region 2 , therefore we have,
Therefore,
For H field , we have
Reflection co-efficient and transmission co-efficient in case of normal incidences:
In this case part of the energy is transmitted and part of the energy is reflected.
Perfect dielectric: = 0. no absorption or loss of power in propagation through the dielectric.
Boundary is parallel to the x = 0 plane.
Plane wave traveling in +x direction is incident on it.

Field Theory 10ES36
Dept of ECE, SJBIT 120
We have,
1
1
2
i r
r r
t t
E H
E H
E H
BC: Tang comp. Of E or Hr r
is continuous across the boundary.
ie.,
1 2
2 1
2 1 2 1
2 1
2 1
1
1 2
1 2
1 2
1 1
2 1 2
1 1
2, 1
,
2
i r z
i r t
i r i r z i r
i r i r
i r
r
i
t i r r
i i
r r
t
t t
i i
H H H
E E E
H H E E H E E
E E E E
E E
E
E
E E E EAlso
c E E
H EFurther
H E
H E
H E
The permeabilities of all known insulators do not differ appreciably from that of free space,
so that,
1 2
0 2 0 1 1 2
0 2 0 1 1 2
1
1 2
2 1
2 1
2
1 2
/ /
/ /
2
2
r
i
t
i
r
i
t
i
E
E
E
E
H
H
H
H

Field Theory 10ES36
Dept of ECE, SJBIT 121
Standing wave ratio :
It is defined as the ratio of the maximum to minimum amplitudes of electric field components
where standing wave exists. It is denoted by,S. 1f Ex max is the maximum amplitude of electric
field and I Ex, min is the minimum amplitude of electric field then standing wave ratio is given
as,
If y is reflection coefficient, the 'S' is given in terms of y as,
The maximum occurs when each term in the parenthesis in (4) has the same phase angle. So, for
Ex positive and real the maximum is,
The minima occur where the phase angles of the two terms in the parenthesis in (4) differ by
180°, thus the minimum is,
Then by definition of standing wave ratio, it is given as,
Such case of plane wave propagation is one in which incident waves on boundaries are not
normal (or perpendicular) to the propagation direction but propagate in any direction.
Let us consider boundary positioned in the x, y plane and assume that the incident wave will
propagate in a direction that could involve all three co-ordinate axis. With this assumption, let us
consider that the propagating medium is loss-less and propagation phase constant is given by

Field Theory 10ES36
Dept of ECE, SJBIT 122
For the simplicity, we consider a two-dimensional case, where the wave travels in a direction
between x and z axes.
Let us consider propagation constant as a vector as K indicated in the figure.
The direction of K is the propagation direction. The magnitude of K is the phase shift per unit
distance along that direction.
In general, the wave propagating in z-direction specified in its phasor form is associated with the
factor
To specify the phase in two-dimensional system, we use vector nature of K. Let us consider the
phase at a general location (x, z) described through a position vector r as shown.in the figure.
Then the phase at location, referenced to the origin is given by the projection of K along r times
the magnitude of r or just k - r. If the electric field is of magnitude Eo, therefore the phasor form
of the wave can be written as,
In two-dimensional case of above figure, k and) can be expressed as,
Therefore,
Therefore equation 1 becomes,

Field Theory 10ES36
Dept of ECE, SJBIT 123
The equation (2) is the general form of wave equation specific to the situation, the angle of
propagation from the x-axis is given by,
The figure shows such series of wave fronts with different phase shifts.
RECOMMENDED QUESTIONS
1. 1. Derive for reflection co-efficient & transmission co-efficient.
2. Derive for reflection co-efficient & transmission co-efficient for normal incidence at a
plane conducting boundary.
3. Define standing wave ratio.
4. Derive for plane wave propagating in general directions