surfaces - ocw.snu.ac.kr
TRANSCRIPT

Surfaces
Human Centered CAD Lab.
1 2009-05-28

Surfaces
Parametric eq.
Implicit eq
Explicit eq
0Rzyx 2222
222 yxRz
)2/2/ ,2(0 sincossincoscos),(
vuvRvuRvuRvu kjiP
2

Bezier surface
n
0i
m
0jmj,ni,ji, 101,u0(v)(u)BBv)(u, vPP
n
0ini,mm,mi,m1,i,1m0,i,0 (u)(v))BB(v)B(v)B( PPP
Bezier curve
3

Bezier surface – cont’ Surface obtained by blending (n+1) Bezier curves Or by blending (m+1) Bezier curves
Four corner points on control polyhedron lie on surface
4

Equation
Bezier surface – cont’
P P(0,0) B (0)B (0)i , j i , n j, m
j 0
m
i 0
n
n
0ini,
P
m
0jmj,ji, (0)B(0)B
i,0
P
P Pi,0 i,n 0,0i 0
n
B (0)
5

Bezier surface – cont’ Boundary curves are Bezier curves defined by
associated control points
Bezier curve defined by P0,0, P0,1, …, P0,m
m
0jmj,j0,
mj,
m
0j
P
n
0ini,ji,
n
0i
m
0j
mj,ni,ji,
(v)B
(v)BB
(v)(0)BBv)(0,
j0,
0u
P
P
PP
6
Bezier surface – cont’
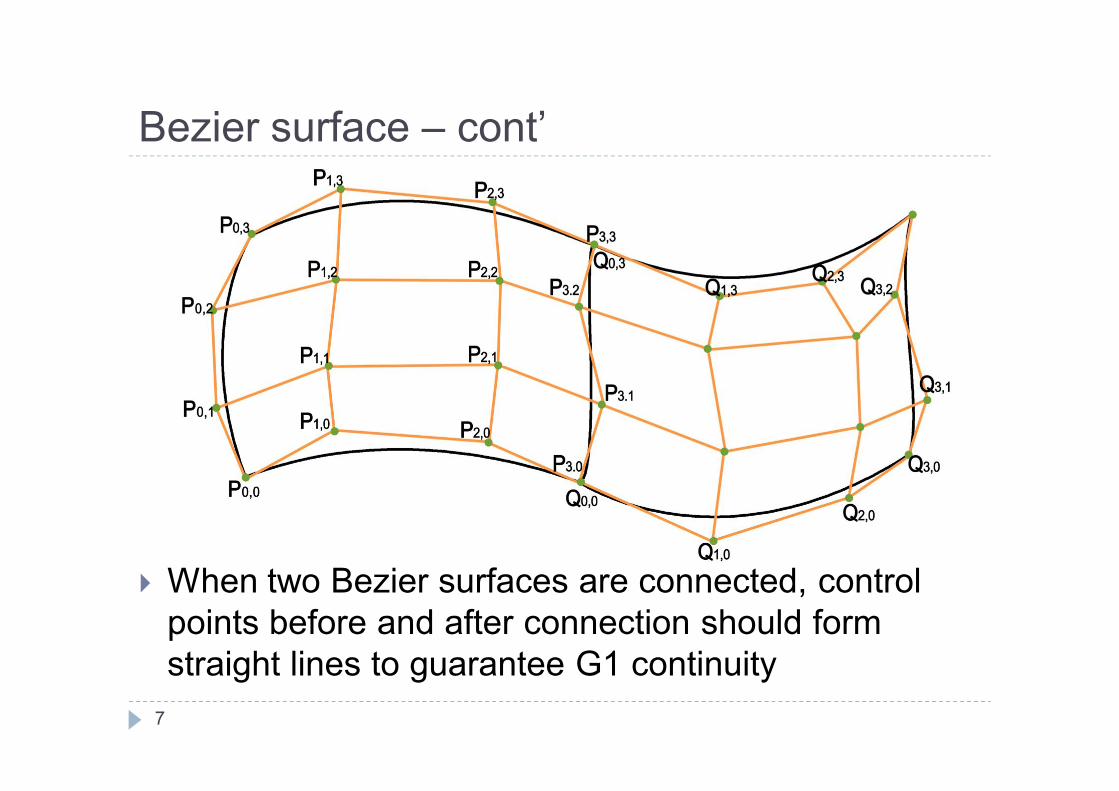
When two Bezier surfaces are connected, control points before and after connection should form straight lines to guarantee G1 continuity
7

B-spline surface
Ni,k(u) is defined by s0, s1, …,sn+k
Nj, (v) is defined by t0,t1,…,t +m
If k=(n+1), =m+1 and non-periodic knots are used, the resulting surface will become Bezier surface
n
0i
m
0j 1m1
1n1kj,ki,ji,
tvtsus
(v)(u)NNv)(u,l
lPP
8
ll l

B-spline surface – cont’ Bezier surface is a special case of B-spline surface. Boundary curves are B-spline curves defined by
associated control points. Four corner points of control polyhedron lie one the
surface (when non-periodic knots are used)
9

NURBS surface
If hi,j = 1, B-spline surface is obtained Represent quadric surface(cylindrical, conical,
spherical, paraboloidal, hyperboloidal) exactly
1m1
1n1k
0 0
0 0
tvtsus
(v)(u)
(v)(u)v)(u,
j,li,k
n
i
m
ji,j
n
i
m
jj,li,ki,ji,j
NNh
NNh PP
10

NURBS surface – cont’ Represent a surface obtained by sweeping a curve
11

NURBS surface – cont’ Assume that v-direction of surface is a given Pj v-direction knot & order is the same as the NURBS
Curve’s (order: l, knot: tp) u-direction order is 2 control point: 2 u direction knot: 0 0 1 1 P0,j = Pj P1,j = Pj + d a h0,j= h1,j = hj from the given curve
12

Ex) Translate half circle to make cylinder
13

Ex) Translate half circle to make cylinder P0=(1, 0, 0) h0=1 P1=(1, 1, 0) h1=1/√2 P2=(0, 1, 0) h2=1 P3=(-1, 1, 0) h3= 1/√2 P4=(-1, 0, 0) h4=1 P0,0 = P0, P1,0 = P0+Hk h0,0 = h1,0=1 P0,1 = P1, P1,1 = P1+Hk h0,1 = h1,1= 1/√2 P0,2 = P2, P1,2 = P2+Hk h0,2 = h1,2=1 P0,3 = P3, P1,3 = P3+Hk h0,3 = h1,3= 1/√2 P0,4 = P4, P1,4 = P4+Hk h0,4 = h1,4=1 Knots for v: 0 0 0 1 1 2 2 2 Knots for u: 0 0 1 1
14

Ex) Surface obtained by revolution Curve Order , knot tp (p=0,1,…,m+ ) Control points Pj, hj (j=0,1,…,m)
Original control points needs to be split into 9.
15

Ex) Surface obtained by revolution – cont’ P0,j = Pj h0,j = hj
P1,j = P0,j +xj j = Pj + xj j h1,j = hj·1/√2 P2,j = P1,j - xj i = Pj - xj (i-j) h2,j = hj
P3,j = P2,j - xj i = Pj - xj (2 i-j) h3,j = hj·1/√2 P4,j = P3,j - xj j = Pj - 2xj i h4,j = hj
P5,j = P4,j - xj j = Pj - xj (2 i+j) h5,j = hj·1/√2 P6,j = P5,j + xj i = Pj - xj (i+j) h6,j = hj
P7,j = P6,j + xj i = Pj - xj j h7,j = hj·1/√2 P8,j = P0,j = Pj h8,j = hj
u-direction order: 3 u-direction knot: 0 0 0 1 1 2 2 3 3 4 4 4
Synthesize four quarter circles
16

Interpolation surface Generate a surface from data points Essential in reverse engineering
Derive B-spline surface passing through data points Qp,q(p=0,…n, q=0,…m). Constraints: (n+1)×(m+1) B-spline’s control points:
minimum (n+1)×(m+1) control points are needed.
17

Interpolation surface – cont’
Pi,j should be obtained Let up, vq to be parameter value of Qp,q
up is obtained while interpolating Q0,q, Q1,q,…, Qn,q
vq is obtained while interpolating Qp,0, Qp,1,… , Qp,m
n
0i
m
0jj,ki,ji, (v)(u)NNv)(u, ٛlPP
n
0i
pki,
)(v
m
0j
qj,ji,
n
0i
m
0j
qj,pki,ji,qp,
)(uN)(vN
)(v)N(uN
qi
C
P
PQ
l
l
18

Interpolation surface – cont’
Ci(v0) (i=0,…,n) are control points of B-splineinterpolating Q0,0, Q1,0, …, Qn,0
Similarly Ci(v1) (i=0,…,n) are control points of B-splineinterpolating Q0,1, Q1,1, Q2,1, … , Qn,1
19
n
0ipki,mimp,
n
0ipki,1ip,1
n
0ipki,0ip,0
n
0ipki,qiqp,
)(u)N(v
)(u)N(v
)(u)N(v
)(0
)()(u)N(v
CQ
CQ
CQ
CQ
ainqformtosubstitute
a

Interpolation surface – cont’ Derive Pi,j from Ci(vq) (q=0,…,m)
Substitute 0 to m for q in (b)
m
0j
qqi (b))(v)(v ٛj,li,jNPC
20

Interpolation surface – cont’ Pi,jare control points of B-spline interpolating Ci(v0),
Ci(v1),…,Ci(vm) P0,j are from C0(v0), C0(v1), …, C0(vm) P1,j are from C1(v0), C1(v1), …, C1(vm) Pn,j are from Cn(v0), Cn(v1), …, Cn(vm)
21

22
Interpolation surface – cont’

23
Interpolation surface – cont’

Interpolation surface – cont’ Order k, are usually set to be 4. Knot values (m+1) set of knot values are obtained during
interpolation along u direction (m+1) set are averaged to result knot values in u
direction Knot values in v direction are derived in the same way
24

Intersection between surfaces Many points on the intersection curves are obtained
by numerical solution Intersection curve should be calculated in Boolean
operation, surface modeling, etc. P(u,v) – Q(s,t) = 0 Four unknowns u, v, s, t with three scalar eqs. Set one parameter value and determine remaining
parameter values, repeat with many values Dependent on Initial value. Cannot guarantee all intersection curves
25

Subdivision method Subdivide both surfaces until control polyhedron
approximates the surface Look for intersecting pairs of planar quadrilaterals
and calculate the intersection Initial values are obtained from the intersection of planar
quadrilaterals
26

Subdivision method – cont’ Start from one end of intersection and look for the
next pair to be considered and calculate intersection Until surface boundary is reached Traverse in the opposite direction starting from the other
end Start from different pair until all the intersection
curves are obtained
27

Tracing intersection segments
Searching for the next pair Tracing in reverse
28