surface soil moisture estimation from the synergistic use...
TRANSCRIPT

www.elsevier.com/locate/rse
Remote Sensing of Environment 86 (2003) 30–41
Surface soil moisture estimation from the synergistic use of the
(multi-incidence and multi-resolution) active microwave
ERS Wind Scatterometer and SAR data
M. Zribi*, S. Le Hegarat-Mascle, C. Ottle, B. Kammoun, C. Guerin
CETP/IPSL, 10/12, Avenue de l’Europe, 78140, Velizy, France
Received 27 September 2002; received in revised form 14 February 2003; accepted 17 February 2003
Abstract
This paper presents an original methodology to retrieve surface ( < 5 cm) soil moisture over low vegetated regions using the two active
microwave instruments of ERS satellites. The developed algorithm takes advantage of the multi-angular configuration and high temporal
resolution of theWind Scatterometer (WSC) combined with the SAR high spatial resolution. As a result, a mixed target model is proposed. The
WSC backscattered signal may be represented as a combination of the vegetation and bare soil contributions weighted by their respective
fractional covers. Over our temperate regions and time periods of interest, the vegetation signal is assumed to be principally due to forests
backscattered signal. Then, thanks to the high spatial resolution of the SAR instrument, the forest contribution may be quantified from the
analysis of the SAR image, and then removed from the total WSC signal in order to estimate the soil contribution. Finally, the Integral Equation
Model (IEM, [IEEE Transactions on Geoscience and Remote Sensing, 30 (2), (1992) 356]) is used to estimate the effect of surface roughness
and to retrieve surface soil moisture from the WSC multi-angular measurements. This methodology has been developed and applied on ERS
data acquired over three different Seine river watersheds in France, and for a 3-year time period. The soil moisture estimations are compared
with in situ ground measurements. High correlations (R2 greater than 0.8) are observed for the three study watersheds with a root mean square
(rms) error smaller than 4%.
D 2003 Elsevier Science Inc. All rights reserved.
Keywords: Soil moisture; ERS wind scatterometer; ERS/SAR; Forest; Bare soil; IEM
1. Introduction attractive challenge. Actually, during the last 3 decades,
Surface soil moisture plays a crucial role on the con-
tinental water cycle, more specifically on the partition of
precipitation between surface runoff and infiltration (Beven
& Fisher, 1996; De Roo, Offermans, & Cremers, 1996) and
in partitioning the incoming radiation between latent and
sensible heat fluxes. As a consequence, soil moisture influ-
ences the atmospheric water vapor fluxes and consequently
the precipitation. Different numerical weather forecasting
models have demonstrated the high sensitivity of the pre-
dicted estimation of rainfall to soil moisture conditions
(Betts, Ball, Beljaars, Miller, & Viterbo, 1996). Therefore,
the ability of measuring soil surface characteristics on a large
scale from space with a sufficient repetitiveness is an
0034-4257/03/$ - see front matter D 2003 Elsevier Science Inc. All rights reserv
doi:10.1016/S0034-4257(03)00065-8
* Corresponding author. Tel.: +33-1-39-25-48-23; fax: +33-1-39-25-
47-78.
E-mail address: [email protected] (M. Zribi).
considerable efforts have been devoted to develop remote
sensing techniques for characterising the spatial and tempo-
ral variability of soil moisture over large regions (Ulaby,
Moore, & Fung, 1986) especially active and passive micro-
wave techniques as well as interpretation tools (Jackson,
Schmugge, & Engman, 1996).
Passive sensors measure the natural thermal emission of
the land surface at microwave wavelengths using very
sensitive radiometers. The remote-sensed signal depends
on the soil dielectric properties and therefore on its water
content. The poor spatial resolution of the existing instru-
ments (of the order of hundred kilometers for the SSMI/
platform, Paloscia, Macelloni, Santi, & Koike, 2001; Prigent,
Rossow, Matthews, & Marticorena, 1999) prevent land
applications but the future sensor SMOS (Soil Moisture
and Ocean Salinity, Kerr et al., 2001), an L-band interfero-
metric radiometer is a very promising tool for this purpose
with a spatial resolution around 30 km.
ed.

M. Zribi et al. / Remote Sensing of Environment 86 (2003) 30–41 31
Active sensors, particularly the Synthetic Aperture Radar
(SAR) onboard the European Remote Sensing satellite
(ERS), with a spatial resolution better than 50 m has been
largely used in the last past years. The backscattered radar
signal depends strongly on soil moisture and roughness for a
bare soil (Ulaby et al., 1986). For sparse vegetation, the
measured signal depends on the vegetation characteristics
and on the soil backscattering signal attenuated by the
vegetation layer (Prevot et al., 1993; Ulaby, Aslam, &
Dobson, 1982). In the case of dense vegetation like forests,
the soil contribution is generally very weak, particularly at
high incidence angles (Fung, 1994; Ulaby et al., 1986).
Many models have been developed to understand the physics
of the interaction between the radar signal and the surface or
the vegetation parameters (Fung, 1994; Ogilvy, 1991). For
bare soils, the small perturbation model (SPM) for example,
which is valid for smooth soil surfaces, and the Kirchoff
approximation, valid for rough surfaces have been widely
used. A further example is the IEM (Integral Equation
Model) developed by Fung et al. (1992) which has been
validated by different experimental studies (Rakotoarivony,
Taconet, Vidal-Madjar, & Benallegue, 1996; Wu, Chen, Shi,
& Fung, 2001). In parallel to these theoretical models, some
empirical approaches have been developed (Dubois, Van
Zyl, & Engman, 1995; Oh, Sarabandi, & Ulaby, 1992; Shi,
Wang, Hsu, O’Neill, & Engmann, 1997; Zribi & Dechambre,
2002). Among them, the linear approach, linking soil surface
moisture to radar signal, calibrated and validated with SAR
(ERS, SIRC, RADARSAT,. . .) measurements is widely used
(Cognard et al., 1995; Quesney et al., 2000).
Recently, some new studies (Frison & Mougin, 1996;
Jarlan, Mougin, Frison, Mazzega, & Hiernaux, 2002; Mag-
agi & Kerr, 1997; Wagner, Lemoine, Borgeaud, & Rott,
1999; Woodhouse & Hoekman, 2000) focus on another
microwave captor, the ERS wind scatterometer, which was
first designed to measure wind speed and direction over the
sea surface. The instrument (Fig. 1) consists of three anten-
nae producing three beams looking 45j forward, 45j side-
ways, and 45j backward with respect to the satellite’s orbit
Fig. 1. ERS wind scatterometer geometry.
direction. The incidence angle u varies over the instrument
swath from 18j to 47j for the midbeam antenna and from
25j to 59j for the forebeam and aftbeam antennae, giving
thus three measurements for each resolution cell. The sensor
operates at 5.3 GHz and VV polarisation like the SAR
instrument. Its spatial resolution is around 50 km, and
measurements are available every 3–4 days. Because of its
poor spatial resolution, this signal is difficult to interpret over
land. Nevertheless, some methodologies have been proposed
for estimating either the soil water content or the vegetation
amount from WSC data analysis taking advantage of the
multi-incidence capabilities and the high temporal resolu-
tion. In the different studies (e.g. Woodhouse & Hoekman,
2000), the estimation of soil moisture is based on a simple
model with an incoherent combination of vegetation and
bare soil contributions, weighted by their respective percent-
age within the scatterometer cell. The vegetation contribu-
tion is calculated using physical or empirical models
(Magagi & Kerr, 2001). Our approach in this paper is similar,
except that WSC signal inversion is done using additional
SAR information. The SAR data are used to estimate the
vegetation contribution in the WSC signal. In our regions of
interest (agricultural areas integrating patches of forests and
during winter months), the vegetation contribution comes
down to the forested areas backscattered signal. This con-
tribution may then be estimated from the keen analysis of the
SAR high spatial resolution images and removed from the
WSC signal in order to obtain the equivalent ‘‘non-forested
areas’’ signal. In the case of agricultural lands, where the
non-forested areas are mainly crop fields, this ‘‘non-forested
areas’’ signal is related to soil features (soil roughness and
moisture) during a large time period. To separate these two
effects, we propose first to estimate surface roughness using
two incidence angle WSC measurements. Therefore, the
inversion can be performed on the only remaining unknown
parameter, the soil moisture.
The paper is organised as follows. In Section 2, the
proposed methodology to retrieve soil moisture is described.
Section 3 presents the application over three agricultural
watersheds: the watersheds under study and the database
including satellite and ground truth measurements are first
presented. Then, the results both in terms of forest signal
modelling and soil moisture retrieval are shown. Finally,
Section 4 gathers our conclusions.
2. Methodology
Under the assumption that the WSC backscattering signal
is the result of the different target contributions included in
the resolution cell, it can be decomposed in the sum of the
forested areas contribution and the other areas input. Forested
areas (as some other types of vegetation) induce a component
of volume scattering while the different types of bare soils
induce a component of surface scattering. Using the three
antennas of WSC, only small azimuthal effects are observed

Fig. 2. IEM simulations of the backscattering coefficient difference Dr(between 30j and 20j) behaviour versus soil moisture and roughness
parameters for a bare soil surface.
M. Zribi et al. / Remote Sensing of Environment 86 (2003) 30–4132
over the tested sites in this paper (less than 0.5 dB). Therefore,
as for other studies over continental surfaces (Frison &
Mougin, 1996, Magagi & Kerr, 1997, Woodhouse & Hoek-
man, 2000,. . .), we do not consider the azimuthal angle as a
main parameter in our approach. For different surfaces, the
measured radar signal depends then on polarisation and
incidence angle. In particular, soil contribution is more
important at low incidence angles (which makes high inci-
dence angles better designed for vegetation characterisation).
In this paper, we propose a simplified backscatter model
adapted to the analysis of the WSC instrument measure-
ment. Each cell is described as the mixture of the two land
cover types:
– ‘‘Forest’’;
– ‘‘Others’’ than forest, such as agricultural fields or bare
soils.
These two contributions weighted by their respective
cover fractions sum up incoherently to give the measured
signal r0(h):
r0ðhÞ ¼ Cr0forest þ ð1� CÞr0
others ð1Þ
where rforest0 is the backscattering coefficient for forested
areas, C the equivalent fractional forest cover, and rothers0 the
backscattering coefficient of the non-forested areas. It will
be shown in the following how the ‘‘forest’’ signal may be
quantified from the SAR image interpretation and intro-
duced in Eq. (1) to estimate the backscattered signal by the
other surfaces.
2.1. Forest contribution modelling and removing
The backscattered signal over vegetation depends both
on the viewing geometry and on the vegetation character-
istics (total biomass,. . .). Then, over temperate forests
mostly composed of deciduous trees, one can expect that
the radar signal presents a seasonal variation and an inci-
dence dependence. Therefore, a parameterisation of the
forest signal has been searched based on the previous
SAR data analysis. It has been assumed that the forest
signal depends on two variables: time and incidence angle.
The yearly cycle of the forested areas can be modelled by a
circular function (sinus or cosinus) with a 12-month period,
a mean value hrforest0 i, an offset B and an amplitude A,
which have to be determined empirically:
r0forestðtÞ ¼ r0
forest
� �þ Asin
2p12
t þ B
� �ð2Þ
with t being the considered month.
Concerning the incidence angle dependency, many stud-
ies (e.g. Frison & Mougin, 1996; Kennett & Li, 1989) have
shown an approximately linear relationship between the
forest signal and the incidence angle. Following this mod-
elling (validated further by the data analysis in Section
3.2.1), we write:
hr0forestiðhÞ ¼ Dh þ E ð3Þ
where D and E are coefficients which have to be empirically
determined.
Combining Eqs. (2) and (3), rforest0 writes:
r0forestðh; tÞ ¼ Dh þ E þ Asin
2p12
t þ B
� �ð4Þ
Now, from Eq. (1), we have:
r0othersðhÞ ¼
ðr0 � Cr0forestðh; tÞÞ
1� Cð5Þ
Thus, if C (the cover fraction of forests) is known, the ‘‘non-
forested areas’’ contribution rother in the measured signal
could be computed.
2.2. Soil roughness estimation
Different analytical and empirical models have been
developed to understand the backscattering behaviour of
soil surfaces. Bare soil backscattering signal depends on the
two parameters: soil roughness and dielectric constant, this
latter being linked to soil moisture. Now, different studies
(Boisvert et al., 1997; Wegmuller, Matzler, & Schanda,
1989; Zribi & Dechambre, 2002) have shown that the
difference Dr between signal measurements (in dB) taken
at two different incidence angles is essentially linked to soil
roughness and depends only weakly on soil moisture. Fig. 2
shows simulations of Dr (with incidence angles, respec-
tively, equal to 20j and to 30j) for three different values ofsoil moisture: 10%, 20% and 30%, and three different cases
of soil roughness. These simulations have been obtained
from the IEM (Integral Equation Model, Fung et al., 1992,
Appendix A). From Fig. 2, soil moisture effect appears

Fig. 3. IEM simulations of backscattering coefficient versus incidence
angle, for rms height ranging from 0.3 to 1 cm, and Mv = 10%.
Fig. 4. IEM simulations of backscattering coefficient versus surface soil
moisture for different rms heights (VV polarisation, 23j).
M. Zribi et al. / Remote Sensing of Environment 86 (2003) 30–41 33
negligible in comparison with roughness effect on Dr.Therefore, we can write:
r0ðh1Þ � r0ðh2Þcf ðroughnessÞ ð6Þ
For WSC data analysis, it means that the simultaneous
measurements performed with two different incidence
angles present a difference only dependent on soil rough-
ness. In our case, the two different incidence angles corre-
spond to the midbeam and forebeam antennae since the
aftbeam acquisitions are often missing).
Then, IEM simulations of the backscattering coefficient
have been performed for different kinds of surfaces present-
ing different root mean square (rms) heights (which is the
key parameter for characterising soil roughness in IEM, cf.
Appendix A), ranging from 0.3 to 1 cm for a constant water
content. The results plotted in Fig. 3 clearly show that the
different curves are very close for incidence angles around
15j. In comparison to what happens at high incidence
angles, the slopes of the curves corresponding to different
roughness show a large dynamic at low incidences. From
these results, we use the slope of the curves at low incidence
angles, as the differentiating parameter for roughness esti-
mation: the higher the soil rms height, the lower the slope.
Consequently, the different incidence angle WSC measure-
ments may be used to estimate this slope parameter and to
deduce the soil roughness class. Since, two incidence meas-
urements are acquired simultaneously on the same grid point,
the soil roughness can be estimated by fitting the r0 angular
differences to the IEM predictions. In order to obtain a better
accuracy, the minimisation is performed on a large number of
couples of data acquired over a time period during which it
can be assumed that the surface roughness at this scale is
constant. If n is this number of couples of data, the cost
function to be minimised is the following:
F ¼Xni¼1
½ðri1ðh
i1Þ � ri
2ðhi2ÞÞ � ðri
IEMðhi1Þ � ri
IEMðhi2ÞÞ
2
ð7Þ
where the superscript i denotes the ith measurement, r1i (h1
i)
and r2i (u2
i) are the WSC backscattering coefficients at
incidence angles h1i and h2
i , and rIEMi (h1
i) and rIEMi (h2
i ) cor-
respond to the IEM simulations at the same incidence angles.
2.3. Soil moisture estimation
Different experimental studies performed with the SAR/
ERS instruments (Cognard et al., 1995; Quesney et al.,
2000; Wang et al., 1997) have shown that for a given soil
roughness, the soil moisture effect on the radar signal
acquired over bare soil surfaces is approximately linear up
to volumetric soil moisture values around 35–40%, and
therefore can be written:
r0dB ¼ a:Mv þ b ð8Þ
where rdB0 is the radar cross-section in dB, Mv is the volum-
etric surface soil moisture, a and b are empirical constants.
IEM simulations have been performed to analyse the
links between soil moisture and rdB0 and to evaluate the
chances to inverse the surface soil water content. Fig. 4
shows IEM simulations of the backscattering coefficient
versus the surface soil moisture for different rms heights and
in the configuration of the SAR instrument (VV polar-
isation, incidence angle of 23j). The results clearly state
that the radar signal saturates quickly with Mv for values
greater than 25%. For Mv values ranging from 5% to 20%,
IEM simulations could be approximated linearly and the
fitted slope is independent of the surface roughness. The
slope value obtained (0.28) shows a very good agreement
with (Quesney et al., 2000) the empirical results. The IEM
ability to model radar sensitivity to surface soil moisture
was checked for VV polarisation, and an incidence angle of
23j (ERS2/SAR features). The IEM model simulations
were used to generalize this result and then to estimate the
(hdB0 ,Mv) slope (i.e., the a parameter in Eq. (8)) for different
incidence angles. Then, we have:
r0dBðhÞ ¼ aðhÞMv þ r0
IEM;Mv0þ b ð9Þ
where rdB0 (h) is the backscattering value for a dielectric
surface, Mv the soil moisture, a(h) is deduced from the IEM

Fig. 5. Summary of the soil moisture inversion algorithm.
Fig. 6. Location of the studied watersheds: Grand Morin, Petit Morin, and
Serein.
Table 1
Main features of studied watersheds: Grand Morin, Serein, and Petit Morin:
soil texture class: (rough: clay < 18% and sand>65%, medium: 18%<
clay < 35% and sand>15%, or clay < 18% and 15%< sand < 65%, medium-
fine: clay < 35% and sand < 15%, fine: 35%< clay < 60%), main parental
material (1) alluvial or glacial depositing, (2) carbonate rocks and dolomite,
(3) sandy rocks and detrital formations, (4) silty rocks, (5) crystalline and
magmatic or volcanic rocks, 6: marl and clayey rocks
Watershed Grand Morin Serein Petit Morin
Size (km2) 1190 1120 605
M. Zribi et al. / Remote Sensing of Environment 86 (2003) 30–4134
simulations, rIEM,Mv0
0 is the IEM backscattering simulation
value for a given soil moisture Mv0 and the considered
roughness parameter (estimated as explained in Section
2.2), and b is a constant used to fit IEM model with real
measurements. In our study, based on empirical studies made
on our experimental sites (Quesney et al., 2000, Le Hegarat
et al., 2002), we take Mv0 = 10% and b =� 9.6 dB.
In summary, having estimated soil roughness from n
couples of measurements, we can get rIEM,Mv0
0 from the
IEM model. Then, inverting Eq. (9), we can retrieve the
Mv values corresponding to each couple of measurements
performed at the different incidence angles. The method-
ology is summed up in Fig. 5.
Soil texture (%) rough: 1 rough: 18 rough: 1medium: 36 medium: 9 medium: 43
medium-fine: 59 medium-fine: 53 medium-fine: 41
fine: 4 fine: 20 fine: 11
Main parental depositing: 12 depositing: 3 depositing: 19
material (%) carbonate and
dolomite: 26
carbonate and
dolomite: 41
carbonate and
dolomite: 45
sandy rocks
and detrital: 1
sandy rocks
and detrital: 0
sandy rocks
and detrital: 1
silty rocks: 57 silty rocks: 0 silty rocks: 31
crystalline and
volcanic: 0
crystalline and
volcanic: 27
crystalline and
volcanic: 4
marl and clayey
rocks: 4
marl and clayey
rocks: 29
marl and clayey
rocks: 0
Main kinds of forest: 27 forest: 26 forest: 28
vegetation (%) wheat: c 35 grassland: c 28 wheat: c 25
peas: 9F 2 wheat: 11F 2 peas: 9F 2
colza: 5F 2 colza: 11F 2 colza: 9F 2
corn: 7F 2 barley: 6F 2 corn: 4F 2
barley: 5F 2 barley: 5F 2
3. Application and results
3.1. Studied areas and database
3.1.1. Studied areas
The methodology was applied over three different French
watersheds for which ERS/SAR, WSC, and ground-truth
data were available: the Grand Morin, the Serein, and the
Petit Morin. They are all sub-basins of the Seine river’s
catchment (cf. Fig. 6). The Petit Morin basin borders the
Grand Morin. The Serein watershed is located southern.
These three basins are agricultural areas including forests
and grassland areas (mainly pasture lands). Table 1 (Le
Hegarat-Mascle, Zribi, Alem, Weisse, & Loumagne, 2002)
gives the main features of these three watersheds: size, soil
type, and land cover percentages. The crop percentages may
slightly vary from one year to the next because of the crop
rotation cycles practised in these agricultural regions. We
note that, in the case of these three watersheds, the forested
areas amount to nearly 30% of the whole area. Soil compo-
sition is about the same for the Grand Morin and the Petit

Fig. 7. SAR image compositions of the three studied watersheds: (a) Grand Morin, (b) Petit Morin, and (c) Serein.
M. Zribi et al. / Remote Sensing of Environment 86 (2003) 30–41 35

Fig. 8. Forest backscattering signal evolution versus time, cases of the
Grand Morin and Petit Morin watersheds.
M. Zribi et al. / Remote Sensing of E36
Morin, but it is different in the case of the Serein watershed.
It may also be noted that these watersheds are rather flat
areas: over the Grand Morin, 96% of the watershed has a
zero to small slope ( < 8%); over the Serein, 69% of the
watershed has a zero to small slope, 14% a small slope
( < 15%) and 17% a rather large slope ( < 25%); and for the
Petit Morin, 100% of the watershed has a zero to small slope.
In the case of the Serein, the area where the slope is greater
than 8% is covered by forests.
3.1.2. Database
The data used in this study have been acquired during
three vegetation cycles (from 1999 to 2001). We remind that
in the case of North European agricultural sites, the agricul-
tural year lasts from November (beginning of soil works in
particular for winter crops) to October of the following year
(end of harvest).
On the one hand, ERS/WSC data from ERS2 mission
from January 1996 to 2001 were analysed. The ERS/WSC
main features have already been recalled in Section 1. On
the other hand, ERS2/SAR images were used to estimate the
forest backscattering signal. The ERS/SAR main features
are: wavelength kc 5.6 cm (C band: frequency fc 5.3
GHz), VV polarisation system, incidence anglec 23 j in
the middle of the swath, spatial resolution: 25 25 m2, pixel
size 12.5 12.5 m2. For the 3 studied years, the total
number of ERS/SAR images acquired per watershed is
equal to 20. Fig. 7 shows examples of colour compositions
of ERS images, respectively acquired over the Grand Morin,
the Petit Morin, and the Serein watersheds.
At the same dates as SAR data acquisitions, ground truth
campaigns were carried out. These measurements include
soil moisture gravimetric measurements. They were per-
formed over about 10 test fields within the watershed.
Moreover, for the Petit Morin and the Grand Morin, water-
sheds, daily measurements from TDR (Time Domain
Reflectivity) probes were also acquired.
In order to estimate the forest fractional cover (parameter
C in Eq. (1)) and to quantify the forest SAR signal,
classifications of the ERS/SAR series were performed. The
classification method, which is applied to a multi-date
feature vector, is unsupervised: class feature estimation is
done using the fuzzy c-means algorithm (Bezdek, Ehrlich, &
Full, 1984), followed by a classical Bayesian classification
(Le Hegarat-Mascle et al., 2000). According to Le Hegarat-
Mascle et al. (2002), the consideration of 7 to 11 acquisition
dates (depending on the studied watershed) led to very good
classification results in terms of discrimination of the main
land cover types, i.e. forest, grass land areas, agricultural
fields at bare soil state or with vegetation cover. Classifica-
tion results are interpreted and validated using both ground
truth measurements (for each watershed, the land use was
plotted on a map corresponding to a subpart of the water-
shed) and CORINNE land cover database (Giordano et al.,
1990) in which the classes ‘‘broad-leaved forests’’, ‘‘conif-
erous forest’’, and mixed forest’’ have been gathered.
3.2. Results
3.2.1. Signal over forested areas
From SAR series classification, the temporal evolution of
the radar signal for each class was retrieved, and particularly
for the forest one. This latter class is the most stable along the
year: it presents only weak amplitude fluctuation around a
mid value. Fig. 8 illustrates the temporal variation of the
forest class from 01/1999 to 01/2001, for the Grand Morin
and Petit Morin watersheds. The cyclic evolution of the SAR
signal is clearly shown and confirmed the assumptions made
in Section 2. The maximum value is observed in winter
(December or January) and the lowest value is reached
around July. Indeed, during winter, the soil component in
the backscattered signal (due to leaves, needles, branches,
trunks and soil) is significant, and the backscattering signal
increases with soil moisture. On the opposite, during the
vegetative period (particularly in summer), the influence of
the soil surface is negligible and the volume scattering is the
dominant mechanism contributing to the backscattering
coefficient. From these results, it is possible to fit the annual
variations of the backscattering coefficient over forested
areas by a sinusoidal function as proposed in Section 2.1.
Fig. 8 illustrates the comparison between the observed
SAR and the fitted model given by Eq. (10). For the three
studied watersheds, the mean forest signal hrforest0 i has
approximately the same level: around � 6.75 dB. Since
the maximum is reached in December, the time offset Eq.
(2) may be set to p/2. Finally, from the results presented in
Fig. 8, the amplitude is taken equal to 1 dB. Therefore, in
our case Eq. (2) writes:
r0forestðtÞ ¼ �6:75þ sin½2p=12ðt þ 3Þ ð10Þ
This model is valid at the SAR incidence, i.e. around 23j.To generalize this model at other incidences, the coefficients
D and E of Eq. (3) have to be determined. For this purpose,
only the WSC cells which have a percentage of forest larger
than 65%, calculated from CORINE land cover database are
considered. In Fig. 9, the WSC/ERS radar signal measure-
nvironment 86 (2003) 30–41

Fig. 9. Forest backscattering signal versus incidence angle.
M. Zribi et al. / Remote Sensing of Environment 86 (2003) 30–41 37
ments are plotted against the incidence angle, for the 3 years
of data. The area considered for these measurements is the
Eastern part of France (about 8j in latitude and 6j in
longitude). The linear approximation of this data set is:
r0forestðhÞ ¼ �0:1069 h � 5:0178 ð11Þ
giving a correlation coefficient R2 equal to 0.81 and a rms
value equal to 0.55. We also note the rather small signal
dynamics at fixed incidence angle: about 2 dB. Combining
Fig. 10. ‘‘Non-forest’’ WSC signal versus incidence angle for two periods:
(a) December–January and (b) May–June.
Eqs. (10) and (11), we obtain the empirical coefficients A, B,
D, and E of Eq. (4):
r0forestðh; tÞ ¼ �0:1069h � 4:3þ sin½2p=12ðt þ 3Þ ð12Þ
Using Eqs. (5) and (12), the forest contribution in the
measured WSC signal can be removed. Remaining contri-
bution corresponds to all other land uses and particularly
bare soils. Fig. 10a and b show the ‘‘non-forested areas’’
WSC signal for two periods: (a) December–January and (b)
May–June. In the case of the summer period, we clearly
observe the very weak value of the slope, due to the fact that
scattering is mainly vegetation (dense at this period) volume
scattering. In the case of the winter period, the effect of the
soil surface is more significant as we have successfully
remove the forest contribution. It seems to be the case since
the signal dynamic at a given incidence angle has increased
(now equal to 6 dB instead of the previous 2 dB of Fig. 9), as
well as the slope for small incidence angles, due to the high
decrease of the coherent part in rough surface backscattering.
3.2.2. Soil moisture retrieval
For the considered sites, like for most of Northern
Europe watersheds, from August to February, most of the
Fig. 11. Comparison of retrieved and ground measurements of surface soil
moisture: (a) Grand Morin watershed and (b) Petit Morin watershed.
M. Zribi et al. / Remote Sensing of Environment 86 (2003) 30–4138
non-forested areas are agricultural fields either at bare soil
state or with very sparse vegetation. During March–April
months, sparse vegetation appears and May–July months
correspond to the dense vegetation period. During this last
period, it is not possible to retrieve soil moisture. Here, the
retrieval of surface soil moisture was only performed during
the August–February period.
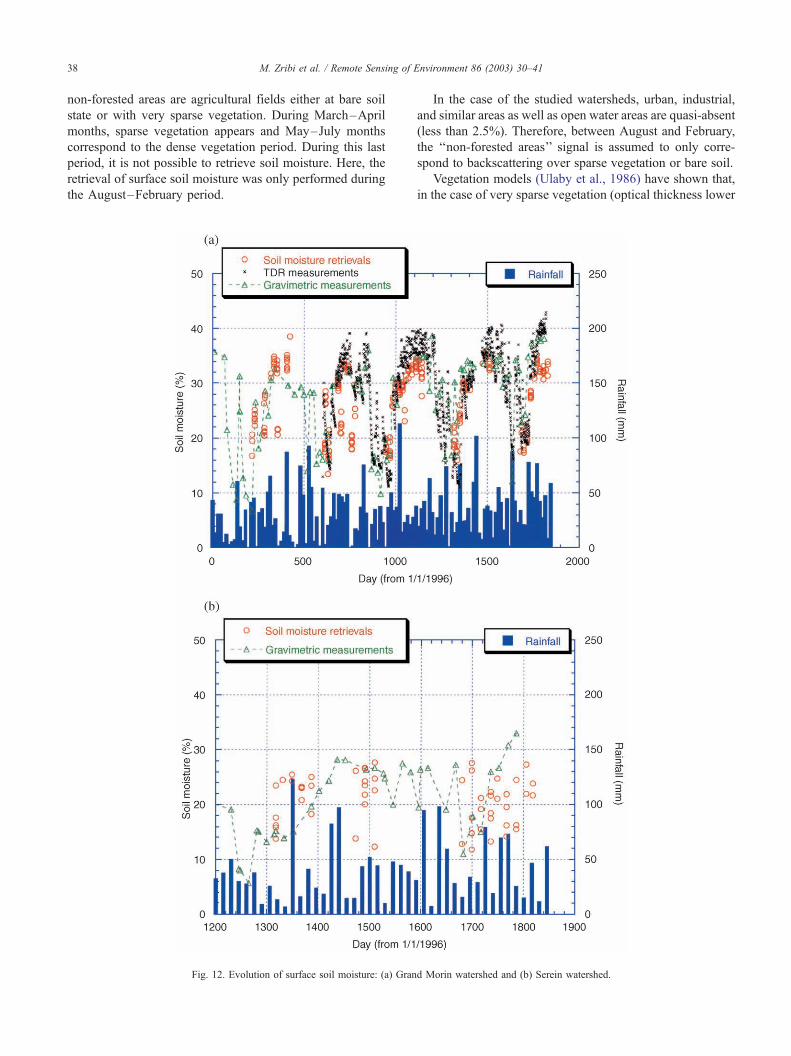
Fig. 12. Evolution of surface soil moisture: (a) Gran
In the case of the studied watersheds, urban, industrial,
and similar areas as well as open water areas are quasi-absent
(less than 2.5%). Therefore, between August and February,
the ‘‘non-forested areas’’ signal is assumed to only corre-
spond to backscattering over sparse vegetation or bare soil.
Vegetation models (Ulaby et al., 1986) have shown that,
in the case of very sparse vegetation (optical thickness lower
d Morin watershed and (b) Serein watershed.

M. Zribi et al. / Remote Sensing of Environment 86 (2003) 30–41 39
than 0.1) and in a first approximation, the backscattering
signal at low incidence angles only depends on bare soil
features. Inversely to the contribution from vegetation,
which is fairly stable with the incidence angle, the bare soil
backscattering coefficient decreases rapidly with the inci-
dence angle. To ensure both that the considered signal is
principally dependent on soil moisture and not on vegetation
features, and a high dependence of the backscattering slope
function with the incidence angle, only the low incidence
angles are kept in the soil moisture inversion process. Then,
the WSC measurements at incidence angles lower than 30jwere kept and the methodology described in Section 3.2.2
was applied.
Fig. 11 shows the soil moisture retrievals in the cases of
the Grand Morin and the Petit Morin watersheds during
August–February periods and the 3 years studied (1996–
1998). Soil moisture estimations are compared with ground
truth data acquired by TDR measurements. Each watershed
is covered by different WSC cells (eight in the case of the
Grand Morin and four in the case of the Petit Morin). At a
given date, the plotted soil moisture estimations correspond
to the different estimations obtained on each of these cells.
The ground-truth TDR data are also represented on the
graph. Fig. 11 clearly shows the good performance of the
proposed method on the retrieval of soil moisture during
winter months. The correlation coefficients R2 are greater
than 0.8 and rms errors are lower than 3.5% for the two
watersheds. We also observe a bi-modal structure of our
database: high (>30%) and low soil moistures (around
20%). Since it could increase the computed correlation
coefficient (but does not affect the rms error), it may be
interesting to valid our approach also on some data sets
showing more uniformly distributed soil moistures.
Finally, Fig. 12 shows, for the 3-year time period and the
Grand-Morin and Serein watersheds, the time variation of
the soil moisture retrievals compared to ground truth meas-
urements. A small discrepancy (generally lower than 5%)
may be observed between volumetric soil moisture measure-
ments performed with TDR probes and gravimetric ones. It
is probably mainly due to the fact that TDR are very local
measurements whereas gravimetric ones are averaged over
the watershed, and/or to a small error in the estimation of the
bulk soil density. Fig. 12 shows that the annual cycle of soil
moisture is quite well retrieved by ERS data: high moisture
level for winter rainy period (November–February) and a
lower level for dry period (end of Summer). However, for
some dates (day 699 for example), a large difference
between measurements and estimations (about 10%) is
observed. This is probably due to WSC/ERS calibration,
since it is observed for all the tested cells. The data are also
compared to rainfall observations: high soil moistures are
associated to rainfall events, and the dry periods correspond
to a decrease in soil moisture. Unfortunately, the selection of
incidence angles lower than 30j limits the number of
measurements (approximately two measurements per month
remain).
For the Serein watershed, since no daily TDR measure-
ments are available, the comparison is done with the
gravimetric measurements for some dates. Consequently,
the conclusions for this site are only qualitative.
4. Conclusion
This paper presents a methodology to monitor soil
moisture at large scale over sparse vegetation or bare soils
areas, based on the synergistic use of the two active micro-
wave instruments of the ERS satellites (the wind scatter-
ometer and the SAR). The WSC signal is represented as the
incoherent sum of backscattered signals by different patches
of land uses. Over agricultural areas, the two main land uses,
which can be distinguished, are forests and agricultural
lands. The two contributions may be weighted by their
respective fractional cover. More specifically, for the period
of August–February, agricultural lands are mostly com-
posed of bare soils or sparse vegetation covers such as
wheat fields before raising, but not permanent grassland
areas which are generally too dense. Therefore, we consider
that the radar WSC signal is an incoherent sum of forest and
bare soil effects. Thanks to the high resolution SAR
imagery, the forest signal evolution can be retrieved for 2
years over the studied region. A cyclic behaviour is
observed, and the forest signal is modelled as a function
of time and incidence angle. The fraction of forest within
each WSC cell has been known from classification imagery
interpretation and the backscattered signal over bare soils
can be retrieved. IEM model is used to model the behaviour
of backscattering over bare soil. It is shown that the differ-
ence between radar simulations acquired simultaneously
with two different incidence angles are quasi-independent
of soil moisture. Therefore, we propose to use measure-
ments acquired with midbeam and forebeam antennae to
estimate roughness parameters. Then, soil moisture is
retrieved using a semi-empirical backscattering relationship
(linear approximation based on the IEM). Retrieved soil
moistures for different cell measurements over the studied
watersheds are compared with experimental data. They
show a good agreement with correlation coefficients R2
greater than 0.8 and root mean square errors lower than
3.5%. Among the restrictions, we must note that the method
described here is specifically developed for agricultural
regions principally composed of forests and cultivated areas.
Future studies are carried out to generalize this approach for
other regions concerned by other types of forests or a higher
percentage of grassland areas.
Acknowledgements
The authors would like to thank P.L. Frison for his help
concerning the processing of the WSC data. We also thank
CERSAT for providing us with the ERS scatterometer data.

M. Zribi et al. / Remote Sensing of Environment 86 (2003) 30–4140
Thanks to the European AIMWATER program, where the
SAR data as well as the soil moisture in situ measurements
have been acquired (no. ENV4-CT98-0740).
Appendix A
IEM (Fung et al., 1992) is based on analytical solutions
of the integral equations for tangential surface fields on a
dielectric interface. The model can be applied for different
types of soil surfaces. In IEM, the soil roughness is
characterised by two parameters: the root mean square
(rms) height, and the correlation length.
For the wave numbers, surface rms heights and surface
correlation lengths within the domain validity of the model
(small and moderate roughness surfaces), the backscattering
coefficient r0 can be written:
r0pp ¼
k2
2exp½�2k2z s
2Xln¼1
s2nAInppA2 W
ðnÞð�2kx; 0Þn!
; p ¼ h; v
ð16Þ
Where kz = k cos hi, kx = k sin hi, hi is the incident angle, k
the wave number, and s the rms height of surface. Ippn is a
function of the incidence angle, soil dielectric constant, s,
and the Fresnel reflection coefficient. W (n) (� 2kx,0) is the
Fourier transform of the nth power of the surface correlation
function.
This IEM version (Wu et al., 2001) introduces the transi-
tional function in which the Fresnel reflection coefficient
Rp(T) is not evaluated for an incidence angle hi, but for anangle ranging from hi to the normal incidence. It writes:
RpðTÞ ¼ RpðhiÞ þ tRpðhspÞ � RpðhiÞbcp; p ¼ h; v ð17Þ
where Rp (hi) is the Fresnel reflection coefficient calculated
at the incidence angle, Rp (hsp) is the Fresnel reflection
coefficient calculated at the specular angle and cp is a
transition function dependent on polarisation, incidence
angle, and surface parameters.
The IEM input parameters are the dielectric constant
derived from the surface volumetric moisture content and
the soil texture (Hallikanen, Ulaby, Dobson, El-Rayes, &
Wu, 1985), and the correlation function of surface heights,
or its corresponding spectrum. In the case of agricultural soil
studies, an exponential correlation function generally gives
a good fit with the majority of experimental surfaces.
References
Betts, A. K., Ball, J. H., Beljaars, A. C. M., Miller, M. J., & Viterbo, P. A.
(1996). The land surface-atmosphere interaction: a review based on
observational and global modeling perspectives. Journal of Geophysi-
cal Research, 101(D3), 7209–7225.
Beven, K. J., & Fisher, J. (1996). In J. B. Stewart, E. T. Engman, R. A.
Feddes, & Y. Kerr (Eds.), Remote sensing and scaling in hydrology,
scaling in hydrology using remote sensing. Chichester, England: John
Wiley & Sons.
Bezdek, J. C., Ehrlich, R., & Full, W. (1984). FCM: the fuzzy c-means
algorithm. Computer and Geoscience, 10(2–3), 191–203.
Boisvert, J. -B., Gwyn, Q. H. J., Chanzy, A., Major, D. -J., Brisco, B., &
Brown, R. -J. (1997). Effect of surface soil moisture gradients on mod-
eling radar backscattering from bare fields. International Journal of
Remote Sensing, 18(1), 153–170.
Cognard, A. -L., Loumagne, C., Normand, M., Olivier, P., Ottle, C., Vidal-
Madjar, D., Louahala, S., & Vidal, A. (1995). Evaluation of the ERS1/
Synthetic Aperture Radar capacity to estimate surface soil moisture: two
year results over the Naizin watershed. Water Resources Research, 31,
975–982.
De Roo, P. J., Offermans, R. J. E., & Cremers, N. H. (1996). LISEM: a
single-event, physically based hydrological and soil erosion model for
drainage basins. II: sensitivity analysis, validation and application. Hy-
drological Processes, 10, 1119–1126.
Dubois, P. C., Van Zyl, J., & Engman, T. (1995). Measuring soil moisture
with imaging radars. IEEE Transactions on Geoscience and Remote
Sensing, 33(4), 915–926.
Frison, P. L., & Mougin, E. (1996). Use of ERS-1 wind scatterometer data
over land surfaces. IEEE Transactions on Geoscience and Remote Sens-
ing, 34, 1–11.
Fung, A. K. (1994). Microwave scattering and emission models and their
applications. Norwood, MA: Artech House.
Fung, A. K., Li, Z., & Chen, K. S. (1992). Backscattering from a randomly
rough dielectric surface. IEEE Transactions on Geoscience and Remote
Sensing, 30(2), 356–369.
Giordano, A., et al. (1990). CORINE soil erosion risk and important land
resources. Publication of the European Communities, 13233, EN.
Hallikanen, M. T., Ulaby, F. T., Dobson, M. C., El-Rayes, M., & Wu, L.
(1985). Microwave dielectric behavior of wet soil—Part I: empirical
models and experimental observations. IEEE Transactions on Geosci-
ence and Remote Sensing, 23(1), 25–34.
Jackson, T. -J., Schmugge, J., & Engman, E. -T. (1996). Remote sensing
applications to hydrology: soil moisture. Hydrological Sciences, 41(4),
517–530.
Jarlan, L., Mougin, E., Frison, P. L., Mazzega, P., & Hiernaux, P. (2002).
Analysis of ERS wind scatterometer time series over Sahel (Mali).
Remote Sensing of Environment, 81, 404–415.
Kennett, O. G., & Li, F. K. (1989). Seasat over land scatterometer data. Part
I: global overview of the Ku-band backscatter coefficient. IEEE Trans-
actions on Geoscience and Remote Sensing, 27, 592–605.
Kerr, Y. H., Waldteufel, P., Wigneron, J. -P., Martinuzzi, J. M., Font, J., &
Berger, M. (2001). Soil moisture retrieval from space: the soil moisture
and ocean salinity (SMOS) mission. IEEE Transactions on Geoscience
and Remote Sensing, 39(8), 1729–1735.
Le Hegarat-Mascle, S., Quesney, A., Vidal-Madjar, D., Taconet, O., Nor-
mand, M., & Loumagne, C. (2000). Land cover discrimination from
multitemporal ERS images and multispectral LANDSAT images: a
study case in an agricultural area in France. International Journal of
Remote Sensing, 21, 435–456.
Le Hegarat-Mascle, S., Zribi, M., Alem, F., Weisse, A., & Loumagne, C.
(2002). Soil moisture estimation from ERS/SAR data: toward an opera-
tional methodology. IEEE Transactions on Geoscience and Remote
Sensing, 40(12), 1–12.
Magagi, R. D., & Kerr, Y. H. (1997). Retrieval of soil moisture and veg-
etation characteristics by use of ERS-1 wind scatterometer over arid and
semi-arid areas. Journal of Hydrology, 188–189, 361–384.
Magagi, R. D., & Kerr, Y. H. (2001). Estimating surface soil moisture and
soil roughness over semiarid areas from the use of the copolarization
ratio. Remote Sensing of Environment, 75(3), 432–445.
Ogilvy, O. (1991). Theory of wave scattering from random rough surfaces.
Bristol: Adam Hilger.
Oh, Y., Sarabandi, K., & Ulaby, F. T. (1992). An empirical model
and an inversion technique for radar scattering from bare soil

M. Zribi et al. / Remote Sensing of Environment 86 (2003) 30–41 41
surfaces. IEEE Transactions on Geoscience and Remote Sensing, 30(2),
370–381.
Paloscia, S., Macelloni, G., Santi, E., & Koike, T. (2001). A multifrequency
algorithm for the retrieval of soil moisture on a large scale using micro-
wave data from SMMR and SMM/I satellite. IEEE Transactions on
Geoscience and Remote Sensing, 39(8), 1655–1666.
Prevot, L., Dechambre, M., Taconet, O., Vidal-Madjar, D., Normand, M.,
& Galle, S. (1993). Estimating the characteristics of vegetation canopies
with airborne radar measurements. International Journal of Remote
Sensing, 14(15), 2803–2818.
Prigent, C., Rossow, W. B., Matthews, E., Marticorena, B., 1999. Micro-
wave radiometric signatures of different surface types in deserts. Jour-
nal of Geophysical Research, 104(D10), 147–12, 158–12.
Quesney, A., Le Hegarat-Mascle, S., Taconet, O., Vidal-Madjar, D.,
Wigneron, J. P., Loumagne, C., & Normand, M. (2000). Estimation
of watershed soil moisture index from ERS/SAR data. Remote Sensing
of Environment, 72, 290–303.
Rakotoarivony, L., Taconet, O., Vidal-Madjar, D., & Benallegue, M.
(1996). Radar backscattering over agricultural bare soils. Journal of
Electromagnetic Waves and Applications, 10(2), 187–209.
Shi, J., Wang, J., Hsu, A. Y., O’Neill, P. E., & Engmann, T. (1997).
Estimation of bare surface soil moisture and surface roughness param-
eter using L-band SAR image data. IEEE Transactions on Geoscience
and Remote Sensing, 35(5), 1254–1265.
Ulaby, F. T., Aslam, A., & Dobson, M. C. (1982). Effects of vegetation
cover on the radar sensitivity to soil moisture. IEEE Transactions on
Geoscience and Remote Sensing, 20(4), 476–481.
Ulaby, F. T., Moore, R. K., & Fung, A. K. (1986). Microwave remote
sensing active and passive. Norwood, MA: Artech House.
Wagner, W., Lemoine, G., Borgeaud, M., & Rott, H. (1999). A study of
vegetation cover effects on ERS Scatterometer data. IEEE Transactions
on Geoscience and Remote Sensing, 37(2), 938–948.
Wang, J., Hsu, A., Shi, J. C., O’Neil, P., & Engman, T. (1997). Estimating
surface soil moisture from SIR-C measurements over the Little Washita
River watershed. Remote Sensing of Environment, 59, 308–320.
Wegmuller, U., Matzler, C., & Schanda, E. (1989). Microwave signature of
bare soil. Advances in Space Research, 9(1), 307–316.
Woodhouse, I. H., & Hoekman, D. H. (2000). Determining land surface
parameters from the ERS-1 wind-scatterometer. IEEE Transactions on
Geoscience and Remote Sensing, 38(1), 126–140.
Wu, T. D., Chen, K. S., Shi, J., & Fung, A. K. (2001). A transition model
for the reflection coefficient in surface scattering. IEEE Transactions on
Geoscience and Remote Sensing, 39(9), 2040–2050.
Zribi, M., & Dechambre, M. (2002). A new empirical model to retrieve soil
moisture and roughness from C-band radar data. Remote Sensing of
Environment, 84, 42–52.