strategies for the implementation of interconnection network simulators …hj/journals/58.pdf ·...
TRANSCRIPT

International Journal of Computer Systems Science & Engineering, v. 13, no. 1, January 1998, pp. 5-16
1
Strategies for the Implementation of Interconnection Network Simulators on Parallel Computers*
Michael Jurczyk Thomas Schwederski
Department of Computer Science Institute for Microelectronics Stuttgart and Computer Engineering Allmandring 30a,University of Missouri at Columbia D-70569 Stuttgart, Germany121 Engineering Building WestColumbia, Missouri 65211, USATel.: (+1) 573-884-8869 Tel.: (+49) 711-685-5924Fax: (+1) 573-882-8318 Fax: (+49) [email protected] [email protected]
Howard Jay Siegel Seth Abraham
Parallel Processing Laboratory Intel CorporationSchool of Electrical and CH11-102 Computer Engineering, 6505 W Chandler BlvdPurdue University Chandler, AZ 85226-3699, USAWest Lafayette, IN 47907-1285, USATel.: (+1) 765-494-3444 Tel.: (+1) 602-552-3027Fax: (+1) 765-494-2706 Fax: (+1) [email protected] [email protected]
Richard Martin Born
Symbios Logic, Inc.2001 Danfield CourtFort Collins, CO 80525-2998, USATel.: (+1) 970-223-5100x9701Fax: (+1) [email protected]
2
AbstractMethods for simulating multistage interconnection networks using massively parallel
SIMD computers are presented. Aspects of parallel simulation of interconnection
networks are discussed and different strategies of mapping the architecture of the network
to be simulated onto the parallel machine are studied and compared. To apply these
methods to a wide variety of network topologies, the discussions are based on general
interconnection network and switch box models. As case studies, two strategies for
mapping synchronous multistage cube networks on the MasPar MP-1 SIMD machine are
explored and their implementations are compared. The methods result in a simulator
implementation with which 109 data packets can be simulated in 40 minutes on the MasPar
system.
Keywords: mapping strategies, multistage interconnection networks, parallel
simulation, parallel processing, SIMD machine, time-driven simulation
*This research was supported in part by the German Science Foundation DFG scholarship
program GK-PVS, and by NRaD under contract number N68786-91-D-1799. Some of
the equipment used was provided by NSF under grant CDA-9015696.
Acknowledgments: A preliminary version of portions of this material was presented at the
1994 International Conference on Parallel Processing. The authors thank Janet M. Siegel
for her comments.

3
1. Introduction
In many parallel processing systems, multistage interconnection networks are used to
interconnect the processors, or to connect the processors with memory modules, e.g.,
ASPRO, BBN Butterfly, Cedar, NEC Cenju-3, IBM RP3, IBM SP-2, PASM, STARAN,
Ultracomputer [2, 15, 21, 22, 23, 24, 25, 26]. Many implementation parameters, such as
switch box size and buffer organization, have a major influence on network performance
[17]. These parameters must be evaluated by simulation and/or analysis prior to network
implementation to achieve an effective system.
To reduce the very long execution times of network simulations, the use of a massively
parallel system is studied here. Various parallel network simulators based on the discrete
event simulation technique have been implemented on MIMD and SIMD machines, e.g.,
[1, 7]. For certain network classes, e.g., synchronous networks, the time-driven simulation
technique is often superior to the event-driven simulation method. Thus, in this paper,
mapping strategies for time-driven simulators on SIMD computers are discussed and
compared to obtain an efficient simulator. To make those methods applicable to a wide
variety of network topologies, the study is based on a general interconnection network
model.
In the next section, network and switch box models are presented. These models are
used in Section 3 to discuss aspects of parallel simulation and to study and compare
different mapping strategies. A simulator implemented on the MasPar MP-1 and its
performance are overviewed in Section 4.
2. General Network and Switch Box Models
To make the discussions on simulator optimization applicable to a wide variety of
network topologies, the optimization strategies presented here are based on a general
network model. This model of unidirectional multistage interconnection networks is
depicted in Figure 1. A network connecting N sources with N destinations consists of s
stages (s ≥ 1). Each stage i consists of b switch box entities that communicate with the
successor stage via a stage interconnection unit. This unit represents static

4
interconnection patterns between two adjacent stages. The boxes in a stage may be
controlled by a stage control unit, and/or by boxes of adjacent stages (for inter-stage data
flow control). The boxes in the first and the last stage may additionally be controlled by
the sources and destinations, respectively. The stage control entity, which is controlled by
a network control entity, models the stage settings as required in permutation networks,
for example. In self-routing networks, the stage and the network control units can be
omitted.
A general switch box model is depicted in Figure 2. A box provides pi input ports and
po output ports. These ports can forward data and control signals. Data at the input ports
are buffered in qi input queues, which have a queue length of li each. The data is then
transferred to qo output queues with queue length lo each via a switch routing unit. The
data leaves the box at the output ports. The queue model also determines which data type
is to be transferred through the network, e.g., data bytes or data packets. Each queue
array is controlled by a queue control unit. This control unit determines the queueing
policy, e.g., a FIFO queue policy. The queue control unit may be controlled by a box
control unit. This box control unit may also interact with other switch boxes via the input
and output ports to model, for example, flow control strategies within a network.
This general box model can be used to model a broad variety of switch boxes. For
example, an output buffered switch box with input latches as shown in Figure 3(a) [5, 14]
can be modeled by choosing the input queue length qi to be one and specifying a crossbar
switch for the switch routing unit. If the output queues are discarded from the model in
Figure 2, an input buffered switch box (Figure 3b) [8, 18] can be modeled.
Now consider a central memory buffering switch as shown in Figure 3(c) [20]. Without
a buffer allocation constraint, incoming packets are stored in the central memory as long
as the memory with size M is not full. With buffer allocation limitation, incoming
packets are stored in the central memory as long as either the memory is not full, or the
number of packets stored in the memory that are destined to a particular output port does
not exceed a limit LI. This mechanism ensures that during asymmetrical data traffic, data
destined to a particular output port cannot occupy all buffers in the central memory. One
way to represent this switch using the structure in Figure 2 is to omit the input queues and

5
set the length of each output queue to LI. Then the box control unit of a central memory
switch refuses to accept incoming packets if the occupied memory exceeds the size M or if
the length of the output queue to which a packet is destined exceeds the limit LI.
The above discussion demonstrates that the network and the box models can be used to
represent a broad variety of interconnection networks. These models are therefore used in
the following discussion on parallel simulation of interconnection networks.
3. Parallel Simulation Aspects of Interconnection Networks
3.1 Time- Versus Event-Driven Simulation Strategies
The two major simulation methods are event-driven and time-driven [30]. The choice
of style has a major influence on simulator performance and depends on the events to be
simulated. If the density of event occurrence is low, the event-driven simulation should be
used. If a high probability of simultaneous events is expected, the choice of the simulation
style is dependent upon the event characteristics. Synchronous events can be simulated
efficiently with the time-driven style, while the event-driven style should be used with
asynchronous events. The simulation style also affects the best choice of the parallel
computer architecture to be used. MIMD machines with their asynchronous processors
are well suited to support the event-driven simulation style. Because in SIMD machines all
processors operate synchronously, a time-driven simulation can exploit the machine power
efficiently by using this implicit synchronization. Ayani and Berkman, on the other hand,
have shown that although the processors operate synchronously, it is still possible to
implement an event-driven simulator on a SIMD machine [1].
When simulating interconnection networks, the characteristic of the data traffic must be
considered to obtain an efficient simulator. In most cases, the traffic patterns of interest
are either uniform traffic or, more often, a superposition of various traffic types, such as
burst/silence traffic with uniform background traffic, or hot-spot traffic with uniform
background traffic, e.g., [29]. Thus, traffic patterns with lower densities of event
occurrence are frequently mixed with traffic that exhibits high event densities. This results
in continuous network activities that can be simulated efficiently using the time-driven

6
simulation style, assuming synchronous events. In the following discussion, the
effectiveness of the time-driven simulation approach implemented on a SIMD machine will
be demonstrated.
3.2 Mapping Strategies
Mapping strategies of synchronous networks on SIMD machines that use the
time-driven simulation style are considered in this section. A distributed memory SIMD
machine architecture with NS PEs (processing elements that are processor/memory pairs),
as depicted in Figure 4, is assumed. The PEs communicate via an interconnection network
and receive instructions from a common control unit.
Depending on the model used, a consequence of communication in a SIMD machine is
the loss of data if two or more PEs try to send data simultaneously to one variable in a
particular PE [12]. In this case, memory locations are overwritten during the data transfer,
and the destination PE only receives the last data item that was sent. This data loss can be
avoided by either serializing the data transfers, or by appropriate program sequencing. The
transfer serialization method will be shown in the link mapping strategy in Section 3.3.3,
while program sequencing and serialization is used in the box mapping as discussed in
Section 3.3.4.
The implementation of a network simulator on a large-scale SIMD machine gives the
programmer multiple choices for how to map the network structure onto the machine. An
efficient mapping and, accordingly, improved program performance, depend on the SIMD
machine architecture. To study the impact of the architecture on the efficiency of different
mapping strategies, the following measures are considered:
• number of PEs, i.e., NS,
• PE speed and complexity,
• amount of memory per PE,
• inter-PE communication topology and speed.
The number of PEs and the available memory space per PE differ significantly between
machines (e.g., 64K PEs with 8Kbyte RAM each for one configuration of the CM-2 [28],

7
16K PEs with 16Kbyte RAM each for one configuration of the MasPar MP-1 [3]). Also,
the topology and speed of the network connecting the PEs differ. Some machines, like the
MPP [2], only provide a mesh network for communication, while other machines, like the
MasPar MP-1 [3], provide a fast mesh network and a slower multistage router network
for global communication.
A major distinction between the various mapping strategies is the mapping
granularity, which is defined here as the degree of parallelism inherent in the mapping.
Consider the case of mapping multistage interconnection networks on a parallel computer.
Then, fine-granularity mapping is the mapping of an individual network link with the
related input and output buffers onto one PE (link mapping, as shown in Figure 5a).
Medium granularity is the mapping of a single switch box onto one PE (box mapping,
Figure 5b), while the mapping of multiple boxes onto one PE is of coarse granularity
(multibox mapping, Figure 5c). The trade-offs among these mapping strategies will now
be discussed.
It is assumed that in many cases the simulator performance is improved by executing
multiple simulations of the same network in parallel and averaging the results, thereby
exploiting the available machine power. To prevent conflicts among these sub-simulations,
each sub-simulation uses different PEs. Therefore, if the mapping of one network onto a
target machine needs P PEs, while the target machine provides NS PEs, it is assumed that
NS/P network sub-simulators are mapped onto the target machine and are executed in
parallel.
Mapping granularity. The finer the mapping granularity, the greater the number of PEs
that are used per network sub-simulator. This causes a relatively low number of parallel
sub-simulators in the link mapping. With coarser mappings, fewer PEs are used per
sub-simulator, and thus more execution time is needed for a simulation run. However,
more concurrent sub-simulators can be executed than with a finer mapping. Therefore,
with a fine granularity mapping, few but fast parallel sub-simulators can be implemented,
while with medium and coarse granularity, more but slower sub-simulators are obtained.
Because the actual performance of the different mappings is implementation-dependent,
actual execution times must be measured to determine the best mapping. This will be

8
discussed in Section 3.3.5.
Communication overhead. The inter-PE communication network(s) of the target
machine may influence the choice of the mapping strategy to be used if the transfer times
of the available inter-PE communication network(s) are distance and traffic dependent. If a
local network (e.g., a mesh) is used, the transfer time is dependent on the communication
distance. The more PEs used for one sub-simulator, the longer the average communication
distance between these PEs. In this case, a coarse granularity mapping that uses few PEs
with a low communication distance is preferable from the overhead of communication
point of view. If a multistage global network is available, the communication distance is
the same for all source/destination pairs of PEs. Thus, it does not effect the mapping
choice.
Memory requirements. Because in box and multibox mappings, all buffer queues of one
or multiple switch boxes reside in each PE, compared to only two queues in link mapping,
box and multibox mappings require more memory per PE than link mapping. This can be a
major drawback of the box and multibox mappings, especially in SIMD machines,
because the memory space per PE is typically limited. Consider, for example, the data type
to be transferred through the simulated network, which influences the queue model of the
switch box depicted in Figure 2. If data types are modeled on the byte-level and longer
data packets are to be simulated (e.g., Asynchronous Transfer Mode switching (ATM) [9]
with 53 byte packets), the required memory might exceed the available memory per PE
with box and multibox mapping, depending on the switch box size and the buffer length.
Switch box functions. If network functions that operate on a switch box rather than on
single links and/or buffers (e.g., memory length calculation with central memory buffering)
must be mapped, a medium to coarse granularity will give better performance. In these
mappings, information and data of complete switch boxes reside in a single PE, so that
box operations can be performed efficiently. In link mapping, however, information about
the switch box status resides in multiple PEs, so that inter-PE communication is necessary
to perform a switch box operation. This issue will be further discussed in Section 3.3.5,
where the effect of central memory buffering on the performance of link and box mapping
implementations is examined.

9
The trade-offs discussed above are summarized in Figure 6. Two mappings (link and
box mapping) of a multistage cube network onto the PEs of the MasPar MP-1 target
machine are examined and compared in case studies in the next sections.
3.3 Case Studies: Two Strategies for Mapping Synchronous Multistage Cube Networks on the MasPar MP-1 SIMD Machine
3.3.1 Overview of Multistage Cube Networks
The networks considered in the following are synchronous, store-and-forward packet
switching multistage cube networks [21, 22, 23], connecting N = 2n inputs with N outputs.
Multistage cube networks are representatives of a family of topologies that includes the
omega [16], indirect binary n-cube [19], delta [6], baseline [31], butterfly [4], and
multistage shuffle-exchange networks [27]. They can be constructed by using BxB
crossbars so that the network has s = logB N stages of N/B switch boxes each. It is
assumed that N is a multiple of B. A multistage cube network with N = 16 and B = 4 is
shown in Figure 7. Considering the general network model discussed in Section 2, the
multistage cube network model consists of s stages with N/B switch boxes per stage.
Because a self-routing network is assumed, the stage control and the network control
units in the network model are omitted. This model is used in the following sections to
discuss different simulation strategies.
3.3.2 Overview of the MasPar MP-1 Machine Architecture
The MasPar MP-1 parallel computer [3] is a SIMD machine with up to 16K PEs. Each
PE is a 4-bit load/store arithmetic processor with dedicated register space and 16 Kbytes
of RAM in the configuration under consideration. The PEs are arranged in a
two-dimensional matrix in which each non-overlapping square matrix of 16 PEs forms a
cluster. The MP-1 has two different interconnection networks for inter-PE
communication, which are shown in Figure 8 [3]. The eight-nearest-neighbor X-Net
provides fast communication between adjacent PEs, while a slower three-stage global

10
router provides communication between arbitrary PEs.
3.3.3 Link-Mapping Strategy
In link mapping, a BxB switch box is mapped onto 2*B PEs, as shown in Figure 9.
Each PE controls one output buffer of stagei and the corresponding input buffer of
stagei+1. Thus, inter-stage and intra-stage transfers (which consist of data movements
within and between PEs, respectively), queue handling, and statistical operations are
required.
Due to the mapping, an inter-stage transfer can be performed in a single step, in all PEs
simultaneously. To transfer a packet through a switch box (i.e., from input queue to
output queue), inter-PE communication must be used. To avoid the loss of data as a
consequence of the SIMD inter-PE communication, as discussed in Section 3.2, the
intra-stage data transfers must be serialized, which will now be discussed.
Consider, for example, a 2x2 switch box of stagej in a multistage cube network as
depicted in Figure 10. First, assume that the head packet of the upper input queue qui0 is
destined to the upper switch box output queue quo0, while the head packet of the lower
input queue qui1 is destined to the lower switch box output queue quo1. Thus, at this
intra-stage transfer simulation cycle, data must be transferred from PEi to PEk, and from
PEj to PEm. Because only one data item is destined to each destination PE, these data
transfers can be executed in parallel in a single step.
Now assume that the head packets of both input queues (qui0 and qui1) are destined to
the upper switch box output queue quo0, as depicted in Figure 10. For this intra-stage
transfer, two data items, originating from PEi and PEj, must be sent to PEk. If these
transfers were executed in parallel in a single step, PEk would receive one data item only,
while the other one would be lost due to the SIMD inter-PE communication, as discussed
in Section 3.2. Thus, this data transfer must be serialized into two steps to ensure correct
data transmission.
In general, because the packet destination addresses are dependent on simulation
parameters that may be generated at execution time and are not known a priori, each

11
intra-stage data transfer must be serialized to prevent data loss. During each intra-stage
data transfer, up to B packets at the heads of the switch box input queues can be destined
to the same particular output queue, and thus must be routed to the output queue in one
particular PE. To avoid data loss, these B transfers therefore must be performed serially in
B steps.
Assume the structure of a multistage cube network as shown in Figure 11. This
serialization can be done using the global router as follows, given each PE knows the
relative box number, from 0 to (N/B)-1, of the input queue it is simulating within a
network stage. First, all PEs whose relative box number is (0 mod B) transmit data and the
receiving PEs store the data appropriately. Then, all PEs whose relative box number is (1
mod B) transmit data, etc. This serializes the B steps correctly.
Each PE must know the number of the PE simulating the output queue to which its
input queue data is destined. This assignment of PEs to queues can be done in different
ways (an example for central memory buffering is given below) and the potential
destination PE addresses (for output queues) are stored in each PE (simulating the
corresponding input queues).
During a simulation cycle, data packets must be generated at the network inputs in
accordance with the selected traffic model and load. Then, a data transfer between the
network stages must be performed. This operation includes the actual transfer and the
statistics calculation. Finally, a data transfer through the switch boxes must be performed,
which also includes the actual transfer and statistics calculation. Assume that TPGEN is the
execution time needed to generate data packets during one simulation cycle, and that
TSTAGE is the time needed to execute all operations associated with an inter-stage data
transfer. Furthermore, TBOX is assumed to be the time required to execute all operations
associated with a transfer through a switch box during a simulation cycle. Because of the
necessary communication serialization, one simulation cycle requires the execution time:
TCYC,link = 1 * TPGEN + 1 * TSTAGE + B * TBOX . (1)
With central memory buffering, a single buffer queue is associated with all of the B
output links of a switch box. Link mapping can still be utilized by keeping individual
queues in each of the B PEs and by using inter-PE communications to perform the central
12
memory management. To reduce the execution time needed for central memory
management with link mapping, the mapping can be implemented in a way that the fast
nearest-neighbor X-Net of the MasPar MP-1 machine can be used to calculate the central
memory length. To use the X-Net efficiently, the B PEs in which the output buffers of a
particular switch box reside must be adjacent. This must be guaranteed for all switch
boxes. In the following, it will be discussed how this mapping scheme can be implemented.
A multistage cube network is assumed that has the same interconnection patterns between
each stage as depicted in Figure 11.
It is assumed that the input queues of a switch box are numbered from 0 to B-1, where
queue 0 represents the uppermost queue of the box. This numbering is also assumed for
the B switch box output buffers. Furthermore, the switch boxes in stagei are numbered
from 0 to N/B-1 and are indexed by Ei (0 ≤ Ei < N/B), where Ei = 0 represents the
uppermost switch box in stagei. Now assume a mapping, in which the N PEs forming the
output side of stagei are adjacent so that they can be numbered from 0 to N-1 with index
Pi (0 ≤ Pi < N) . Furthermore, assume that the PEs in which the output buffers of a
particular switch box reside are adjacent as well. Thus, the output buffers of the B PEs
with 0 ≤ Pi < B form the output ports of switch box Ei = 0, the output buffers of the B
PEs with B ≤ Pi < 2*B form the output ports of switch box Ei = 1, and so on. Now recall
that a PE Pi contains an output buffer of stagei and an input buffer of stagei+1. During a
data transfer through a box of stagei+1, a PE Pi simulating an input queue of stagei+1 can
calculate to which output port q (0 ≤ q < B) of the switch a packet from its input queue
must be routed. To obtain the address of that destination PE, it has to know to which box
Ei+1 of stagei+1 its input queue belongs. Because the PEs that simulate the output queues of
a switch box are adjacent, the destination PE number Pi+1 relative to stagei+1 can then be
calculated as:
Pi+1 = q + Ei+1 * B, 0 ≤ q < B, 0 ≤ Ei+1 < N/B (2)
To obtain the number Ei+1 of the switch box in stagei+1 to which the input queue of PE
Pi belongs, the inter-stage connection patterns of the network must be considered. In the
network topology considered here (see Figure 11), the output buffers 0 of the first B

13
switches (0 ≤ Ei < B) of stagei are connected to switch 0 of stagei+1, while the output
buffers 0 of the next B switches (B ≤ Ei < 2*B) are connected to switch 1 of stagei+1, and
so on. Because there exist N/B output buffers 0 in stagei, these buffers are connected to
the first N/B2 (0 ≤ Ei+1 < N/B2) switch boxes in stagei+1. The interconnection patterns for
the remaining output ports are similar, so that all output ports 1 of stagei are connected to
the next N/B2 (N/B2 ≤ Ei+1 < 2*N/B2 ) switch boxes in stagei+1, while all output ports B-1
of stagei are connected to the last N/B2 ((B-1)*N/B2 ≤ Ei+1 < N/B ) switch boxes in stagei+1.
Thus, a stagei+1 can be divided into B switch box groups indexed by gri+1 (0 ≤ gri+1 < B),
each consisting of N/B2 switches. All output ports 0 of stagei are connected to switches
belonging to gri+1 = 0, all output ports 1 of stagei are connected to switches belonging to
gri+1 = 1, and so on. Because all PEs Pi forming the output side of stagei are adjacent, the
number of the switch group in stagei+1 to which they are connected can be calculated to be
gri+1 = Pi mod B. Furthermore, the relative position of the box Ei+1 in its group gri+1 (to
which Pi is connected) can be calculated as Pi / B2 . Thus, the number Ei+1 of the switch
box in stagei+1 to which the input queue of PE Pi belongs can be calculated as (recall that a
group gri+1 consists of N/B2 switch boxes) :
Ei+1 = (Pi mod B) * N/B2 + Pi / B2 , 0 ≤ Pi < N. (3)
Using Equations (2) and (3), the destination PE number Pi+1 relative to stagei+1 can be
calculated as:
Pi+1 = q + ((Pi mod B)*N/B2 + Pi / B2 ) * B, 0 ≤ q < B, 0 ≤ Pi < N. (4)
Because the interconnection patterns between each stage of the multistage cube network
under consideration are the same, Equation (4) is valid for all network stages. To obtain
the absolute destination PE address, an address offset, which is dependent on the absolute
address of Pi, must be added to the relative address of Pi+1 in Equation (4). This absolute
destination PE address is equal to (Pi+1) + N*(i+1). Thus, using Equation (4), it is possible
to map a multistage cube network onto the PEs of an SIMD machine in such a way that
the output buffers of a switch box reside in adjacent PEs, so that central memory buffering
can be efficiently implemented. Furthermore, Equation (4) is used to calculate the B

14
destination PEs to which a PE Pi may need to send data in the B transfer steps discussed
above.
3.3.4 Box-Mapping Strategy
In box mapping, each switch box is mapped onto one PE, as shown in Figure 12. The
data transfers within a switch box must be serialized; because at most one data item per
input queue is transferred in each cycle, B steps are necessary. With central memory
buffering, the B output buffer queues associated with the central memory of a switch box
reside in a single PE, so the memory management can be done inside each PE without
time-costly inter-PE communication.
Now consider the inter-stage data transfer. Because each PE must transfer up to B data
packets to the next stage, B inter-stage transfers are required per cycle. By dividing the
transfer into B subcycles, a sequencing is produced where the destination PE receives data
from at most one source PE per subcycle. This sequencing method will be illustrated by a
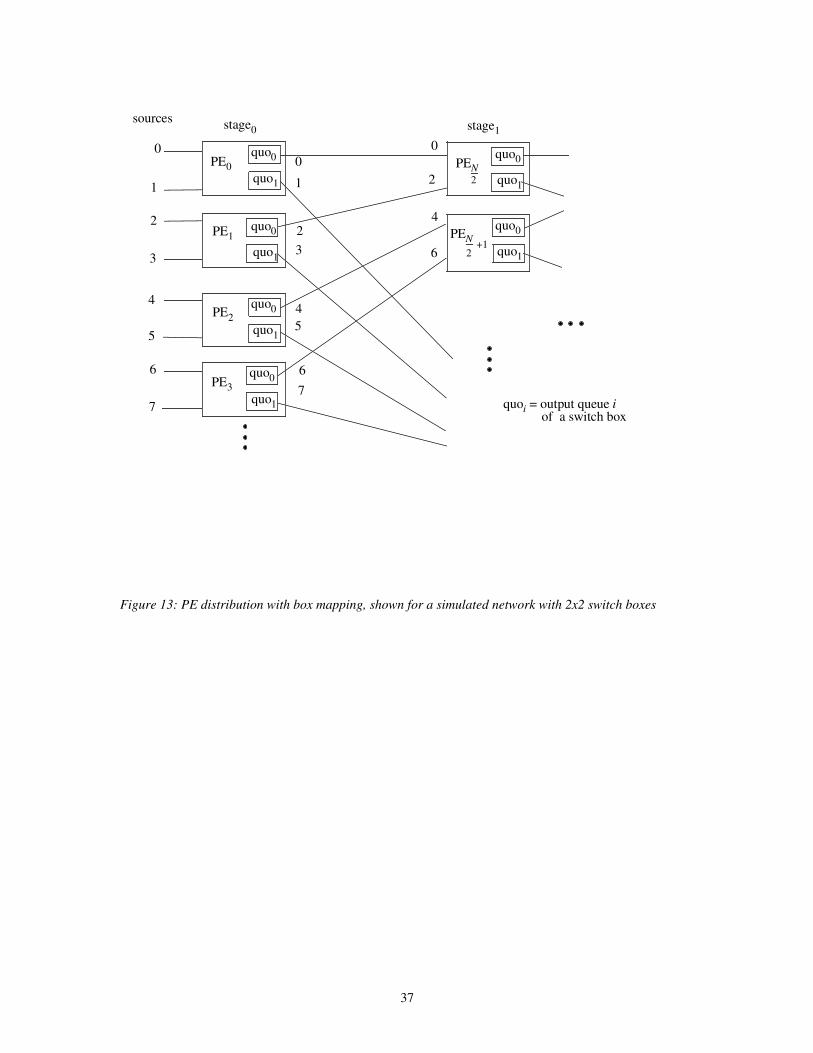
box-mapped multistage cube network consisting of 2x2 output buffered switch boxes.
Parts of stages one and two of this network are depicted in Figure 13. Assume the MP-1
global router is used. If PE0 operates on its queue quo0 while PE1 operates on its queue
quo1 and vice versa, PEN/2 receives data from only one PE per subcycle.
In general, for a box mapped network with BxB switches, consider a particular switch
box in stagei+1. Let the B PEs simulating the boxes in stagei that may send data to this
stagei+1 box be denoted P(k), where 0 ≤ k < B. Then, during subcycle j (0 ≤ j < B), PE
P(k) sends data from its output queue quok+j(mod B). If, for example, the m-th box counted
from the top of stagei is assigned to PE Pi = ( i * N/B ) + m, each PE can readily calculate
its P(k) number with k = ( Pi mod B ), and can use it to select the appropriate output
queue to send data from for each subcycle. Thus, no more than one data packet is routed
to a particular PE per subcycle. With this sequencing method and TPGEN, TSTAGE, and TBOX
defined as in Section 3.3.3, one simulation cycle requires the execution time
TCYC,box = B * TPGEN + B * TSTAGE + B * TBOX (5)

15
which is proportional to B.
3.3.5 Mapping Comparison
Consider the degree of parallelism that can be achieved with box and link mappings. In
link mapping, the inter-stage links including the network inputs and outputs are mapped
onto the PEs so that N*(s+1) PEs are needed for a sub-simulator. In box mapping, each
switch box is mapped onto a single PE, so that s*N/B PEs are needed. Thus, the number
of PEs used by a link map sub-simulator is B*(1+1/s) times the number used by a box map
sub-simulator. Considering the higher degree of parallelism and the number of inter-PE
transfers used, link mapping needs less execution time as compared to box mapping per
sub-simulator.
As mentioned above, the trade-off between the number of networks being simulated in
parallel and the speed of a network simulation is dependent upon the mapping
implementation, and must be examined by execution time measurements, as follows. The
trade-off will be illustrated by a five-stage 1024x1024 multistage cube network consisting
of 256 4x4 switch boxes per stage that is to be mapped onto a MasPar MP-1 machine with
16K PEs. Measurements show that a link-mapped sub-simulator needs 12 msec for central
memory buffering and 9.5 msec for input and output buffering per simulation cycle, while
a box-mapped sub-simulator needs 31 msec per simulation cycle for all buffering
strategies. As discussed above, a link-mapped sub-simulator requires N*(s+1) = 6144 PEs,
while s*(N/B) = 1280 PEs are needed for a box-mapped sub-simulator.
On an MP-1 with 16K PEs, either two link-mapped or 12 box-mapped sub-simulators
can run in parallel. Consider the performance of each approach with its sub-simulators
executing concurrently. Per simulation cycle, a link-mapped simulation averages 6 msec
for central memory buffering and 4.75 msec for input and output buffering, while a
box-mapped simulator averages 2.58 msec for all buffering strategies. Thus, box mapping
needs considerably less execution time per simulation cycle than link mapping, especially
during central memory buffering. Therefore, the only advantage of link mapping,

16
compared to the box mapping strategy, is the low memory requirement per PE. This
advantage is target machine and network type dependent. On the MP-1, for example, the
available memory per PE is sufficient for most practical box sizes and queue lengths (e.g.,
B = 32, li = 0, lo = 64) if short data packets are to be simulated, so that both link and box
mappings can be implemented. Because of the higher performance of box mapping, this
strategy is preferable.
Now consider the PE utilization of the two mapping strategies. For this comparison, it
is assumed that S PEs are used to implement a particular network stage (S = N for link
mapping, and S = N/B for box mapping), and that each network stage operates on uniform
traffic with load λ. The PE-utilization UPE is defined as the busy time of a PE during one
simulation cycle divided by the overall time needed for that simulation cycle (0 ≤ UPE ≤ 1).
Recall that a simulation cycle consists of the traffic pattern generation, one complete
inter-stage data transfer, and one complete intra-stage data transfer. During the data traffic
generation, only the PEs that implement the first network stage are busy, while all other
PEs involved in the network simulation are idle. Because the utilization of each PE not
involved in the pattern generation must be calculated to obtain a worst-case PE utilization
of the mappings, PEs simulating stagei with i > 0 are considered in the following.
Recall that with link mapping the intra-stage box transfers must be serialized into B
subcycles. With this mapping, λ*S PEs perform an inter-stage transfer when simulating
stagei, while λ*S/B PEs perform a switch box transfer during one intra-stage transfer
subcycle. By considering Equation (1) the utilization UPE,link over one simulation cycle of a
single PE not involved in the pattern generation can be calculated as:
.***
***
, λ
λλ
BOXSTAGEPGEN
BOXSTAGE
BOXSTAGEPGEN
BOXSTAGE
linkPE TBTTTT
TBTT
TBB
TU
+++=
++
+= (6)
Measurements with B = 4 show that with link mapping, TBOX ≈ 2.5*TSTAGE ≈ 1.5*TPGEN so
that UPE,link ≈ 0.27*λ.

17
With box mapping, λ*S PEs always perform an inter-stage transfer and a switch box
transfer in stagei. Both operations are serialized in B subcycles. By employing Equation
(5), the utilization UPE,box over one simulation cycle of a single PE not involved in the
pattern generation, with box mapping, can be therefore calculated.
.****
****
, λλλBOXSTAGEPGEN
BOXSTAGE
BOXSTAGEPGEN
BOXSTAGEboxPE TTT
TTTBTBTB
TBTBU
+++=
+++= (7)
Measurements with B = 4 show that with box mapping TBOX ≈ 0.6*TSTAGE ≈ 0.7*TPGEN so
that UPE,box ≈ 0.7*λ. These results show that, under uniform traffic, box mapping has a 2.6
times higher worst-case PE utilization than link mapping. At 80% uniform input load, for
example, box mapping utilization is 56%, while link mapping utilizes the PEs to 21%
only.
All results were derived for store-and-forward packet-switching multistage cube
network simulators. Because the mappings presented depend on the network topology
rather than on network flow control schemes, the simulators can easily be adapted to
schemes like circuit-switching, wormhole routing, or virtual channels (as already
implemented in upgraded simulator versions [11, 13]). If other network topologies, like
meshes or hypercubes, are to be simulated, mapping strategies that reflect the specific
characteristics of those topologies must be found, which is part of future work.
4. Simulator Description and Performance
The link-mapped and box-mapped simulators described in Section 3 were implemented
on the MasPar MP-1 by using the MasPar programming language MPL [3]. MPL is based
on ANSI C, with additional instructions to support data parallel programming. Each
simulation program can be divided into three main parts: (1) simulation parameter input
and network initialization, (2) a simulation itself, and (3) result collection and output.
During a simulation cycle, data packets are generated at the network inputs in accordance

18
with the selected traffic model and load. Then, a data transfer between the different stages
and the data transfer through the switch boxes is performed. During these transfers,
statistics are computed, which comprise stagewise and global average and maximum
packet delays, FIFO buffer queue utilization, and packet throughput. Separate statistics
are collected for uniform, nonuniform, and combined traffic, if a mixed traffic model is
selected. To obtain realistic simulation results, the network must be in a steady-state
condition before statistics can be gathered. Thus, warmup cycles at the beginning of a
simulation are introduced, during which no statistics are gathered. Several simulations can
be performed successively, each separated by warmup cycles, to guarantee the
independence of the trials. The results of the individual trials can be averaged and the
variance of the various results can be evaluated.
The program execution time can be calculated as:
Tsim = Tinit + ( trials ) * (warmup + cycles per trail) * Tloop + trials * Ttrialstat. (8)
Tinit accounts for the time to initialize the simulator and the random pattern generator,
Tloop represents the time needed for the execution of one simulation cycle, and Ttrialstat
accounts for the time needed to calculate the statistics after each trial. Actual
measurements of the box mapping with 12 parallel sub-simulators showed that Tinit ≅ 6
sec, Tloop ≅ 0.0026 sec, and Ttrialstat ≅ 0.056 sec.
As an example of a simulator result, the complementary distribution function of the
buffer utilization (DBU) of a five-stage 1024x1024 network with 4x4 output buffered
switches, under uniform traffic with λ = 0.7, is depicted in Figure 14. This DBU is defined
as the probability P{λo} that an output buffer with length lo will overflow at a given traffic
load. Also, the 95% confidence interval [10] of the DBU is depicted in Figure 14, so
that the actual values lie within this bound with 95% probability. The transmission of 109
packets were simulated in approximately 40 minutes. With the simulator, various network
types under static and temporary non-uniform traffic patterns were examined and classified
[11, 13].
5. Summary

19
Methods for simulating multistage interconnection networks on massively parallel
computers have been presented. Aspects of parallel simulation of networks and the impact
of the target parallel machine on the simulator implementation and performance have been
discussed. To be broadly applicable, general network and switch box models were
introduced. Different mapping strategies were studied and compared. It was shown how
the mapping granularity affects the communication overhead and the memory
requirements of the target parallel machine.
As case studies, two strategies (link and box mapping) of mapping synchronous
multistage cube networks on the MasPar MP-1 SIMD machine were compared. It was
shown how serialization and sequencing of data transfers can be used to obtain an efficient
time-driven simulator, implemented on a SIMD machine. The methods result in a
simulator implementation with which 109 data packets can be simulated in 40 minutes on
the MasPar system.

20
References
[1] R. Ayani and B. Berkman, “Parallel discrete event simulation on SIMD computers,”
Journal of Parallel and Distributed Computing, Vol. 18, No. 4, August 1993, pp.
501-508.
[2] K. E. Batcher, “Bit serial parallel processing systems,” IEEE Transactions on
Computers, Vol. C-31, No. 5, May 1982, pp. 377-384.
[3] T. Blank, “The MasPar MP-1 architecture,” IEEE Compcon, February 1990, pp.
20-24.
[4] W. Crowther, J. Goodhue, R. Thomas, W. Milliken, and T. Blackadar,
“Performance measurements on a 128-node butterfly parallel processor,” 1985
International Conference on Parallel Processing, August 1985, pp. 531-540.
[5] J. Ding and L. N. Bhuyan, “Performance evaluation of multistage interconnection
networks with finite buffers,” 1991 International Conference on Parallel
Processing, Vol. I, August 1991, pp. 592-599.
[6] D. M. Dias and J. R. Jump, “Analysis and simulation of buffered delta networks,”
IEEE Transactions on Computers, Vol. C-30, April 1981, pp. 273-282.
[7] B. Gaujal, A. G. Greenberg, and D. M. Nicol, “A sweep algorithm for massively
parallel simulation of circuit-switched networks,” Journal of Parallel and
Distributed Computing, Vol. 18, No. 4, August 1993, pp. 484-500.
[8] M. G. Hluchyj and M. J. Karol, “Queueing in high-performance packet switching,”
IEEE Journal on Selected Areas in Communications, Vol. 6, No. 9, December
1988, pp. 1587-1597.
[9] R. Hofmann and R. Mueller, “A multifunctional high speed switching element for
ATM applications,” 17th European Solid-State Conference, September 1991, pp.
237-240.
[10] E. C. Jordan, Reference Data for Engineers: Radio, Electronics, Computer, and
Communications, Howard W. Sams & Co. Inc., Indianapolis, 1985.

21
[11] M. Jurczyk and T. Schwederski, “On partially dilated multistage interconnection
networks with uniform traffic and nonuniform traffic spots,” 5th IEEE Symposium
on Parallel and Distributed Processing, December 1993, pp. 788-795.
[12] M. Jurczyk and T. Schwederski, “SIMD processing: Concepts and systems” in
Handbook of Parallel and Distributed Computing, A. Y. Zomaya, ed., McGraw-
Hill, New York, NY, 1995.
[13] M. Jurczyk and T. Schwederski, “Phenomenon of higher order head-of-line blocking
in multistage interconnection networks under nonuniform traffic patterns,” IEICE
Transactions on Information and Systems, Vol. E79-D, No. 8, August 1996, pp.
1124-1129.
[14] M. J. Karol, M. G. Hluchyj, and S. P. Morgan, “Input versus output queueing on a
space-division packet switch,” IEEE Transactions on Communications, Vol. COM-
35, No. 12, December 1987, pp. 1347-1356.
[15] N. Koike, “NEC Cenju-3: A microprocessor-based parallel computer multistage
network,” 8th International Parallel Processing Symposium, April 1994, pp. 393-
401.
[16] D. H. Lawrie, “Access and alignment of data in an array processor,” IEEE
Transactions on Computers, Vol. C-24, No. 12, December 1975, pp. 1145-1155.
[17] K. J. Liszka, J. K. Antonio, and H. J. Siegel, “Problems with comparing
interconnection networks: Is an alligator better than an armadillo?," IEEE
Concurrency, Vol. 5, No. 4, Oct.-Dec. 1997, pp. 18-28.
[18] Y.-S. Liu and S. Dickey, “Simulation and analysis of different switch architectures
for interconnection networks in MIMD shared memory machines,” Ultracomputer
Note 141, NYU, June 1988, pp. 1-26.
[19] M. C. Pease III, “The indirect binary n-cube microprocessor array,” IEEE
Transactions on Computers, Vol. C-26, No. 5, May 1977, pp. 458-473.
[20] D. A. Reed and R. M. Fujimoto, Multicomputer Networks: Message-based Parallel
Processing, MIT Press, Cambridge, MA, 1987.

22
[21] T. Schwederski and M. Jurczyk, Interconnection Networks: Structures and
Properties (in German), Teubner Verlag, Stuttgart, Germany, 1996.
[22] H. J. Siegel, Interconnection Networks for Large-Scale Parallel Processing: Theory
and Case Studies, Second Edition, McGraw-Hill, New York, NY, 1990.
[23] H. J. Siegel, W. G. Nation, C. P. Kruskal, and L. M. Napolitano, “Using the
multistage cube network topology in parallel supercomputers,” Proceedings of the
IEEE, Vol. 77, No. 12, December 1989, pp. 1932-1953.
[24] H. J. Siegel, T. Schwederski, W. G. Nation, J. B. Armstrong, L. Wang, J. T. Kuehn,
M. D. Gupta, M. D. Allemang, D. G. Meyer, and D. W. Watson, “The design and
prototyping of the PASM reconfigurable parallel processing system” in Parallel
Computing: Paradigms and Applications, A. Y. Zomaya, ed., International
Thomson Computer Press, London, 1995, pp. 78-114.
[25] H. J. Siegel and C. B. Stunkel, “Inside parallel computers: Trends in interconnection
networks,” IEEE Computational Science and Engineering, Vol. 3, No. 3, Fall
1996, pp. 69-71.
[26] C. B. Stunkel, D. G. Shea, B. Abali, M. G. Atkins, C. A. Bender, D. G. Grice, P.
Hochschild, D. J. Joseph, B. J. Nathanson, R. A. Swetz, R. F. Stucke, M. Tsao, and
P. R. Varker, “The SP2 high-performance switch,” IBM Systems Journal, Vol. 34,
No. 2, 1995, pp. 185-202.
[27] S. Thanawastien and V. P. Nelson, “Interference analysis of shuffle/exchange
networks,” IEEE Transaction on Computers, Vol. C-30, No. 8, August 1981, pp.
545-556.
[28] L. W. Tucker and G. G. Robertson, “Architecture and applications of the
Connection Machine,” Computer, Vol. 21, No. 8, August 1988, pp. 26-38.
[29] M.-C. Wang, H. J. Siegel, M. A. Nichols, and S. Abraham, “Using a multipath
network for reducing the effect of hot spots,” IEEE Transactions on Parallel and
Distributed Systems, Vol. 6, No. 3, March 1995, pp. 252-268.
[30] F. Wieland and D. Jefferson, “Case studies in serial and parallel simulation,” 1989

23
International Conference on Parallel Processing, Vol. III, August 1989, pp. 255-
258.
[31] C.-L. Wu and T. Y. Feng, “On a class of multistage interconnection networks,”
IEEE Transactions on Computers, Vol. C-29, No. 8, August 1980, pp. 694-702.

24
Figure Captions:
Figure 1: General unidirectional multistage interconnection network model
Figure 2: Switch box model
Figure 3: (a) output buffered switch with input latches, (b) input buffered switch, and (c)
central memory switch
Figure 4: SIMD machine model
Figure 5: Mappings with different granularity: (a) fine, (b) medium, and (c) coarse
granularity mapping
Figure 6: Trade-offs of mappings with different granularity
Figure 7: A 16x16 multistage cube network with 4x4 switch boxes
Figure 8: PE-interconnection structure of the MasPar MP-1 machine [3]
Figure 9: Mapping of PEs on a BxB switch box with link mapping, shown for B=4
Figure 10: Routing conflict in a 2x2 switch box
Figure 11: Part of the inter-stage connection pattern pf a multistage cube network
Figure 12: Mapping of PEs on a BxB switch box with box mapping, shown for B=4
Figure 13: PE distribution with box mapping, shown for a simulated network with 2x2
switch boxes
Figure 14: Complementary queue length distribution function DBU of a 1024x1024
network with 4x4 output buffered switch boxes, under uniform traffic with λ=0.7

25
Figure 1: General unidirectional multistage interconnection network model
network
= data path
= control path
stage cntrl
Si = source i Di = destination i
network control
S0
S1
SN-1
stage0
stag
e in
terc
onne
ctio
nbox0
switch
box1
switch
boxb-1
switch
stag
e in
terc
onne
ctio
n
box0
switch
box1
switch
boxb-1
switch
stage1
stage cntrl
stag
e in
terc
onne
ctio
n
box0 switch
box1 switch
boxb-1
switch
stages-1
stage cntrl
D0
D1
DN-1

26
Figure 2: Switch box model
outputqueueqo-1
queue control
outputqueue1
queue control
outputqueue0
queue control
switch box
port0
port1
portpi-1inputqueueqi-1
queue control
inputqueue1
queue control
inputqueue0
queue control
box control
inpu
t por
ts
switc
h ro
utin
g un
it
outp
ut p
orts
port0
port1
portpo-1
= data path= control path

27
Figure 3: (a) output buffered switch with input latches, (b) input buffered switch, and (c) central memory
switch
(a)
= buffer queue= crossbar switch= latch
(b) (c)
MUX=multiplexor
DMUX=demultiplexor
MU
X
DM
UX
RAM

28
Figure 4: SIMD machine model
control unit
proc1
mem1
PE0
proc = processor
mem = memory
interconnection network
PE1S
PEN -1
proc0
mem0
SprocN -1
SmemN -1

29
Figure 5: Mappings with different granularity: (a) fine, (b) medium, and (c) coarse granularity mapping
= link= switch box= PE
fine granularity medium granularity coarse granularityPE per link PE per box PE per T boxes
PE PEPE
(a) (b) (c)
PEPE
PE
PEPE
PE
PE
PE
PE PE

30
Figure 6: Trade-offs of mappings with different granularity
fine granularity medium granularity coarse granularity
PE per link PE per box PE per T boxes
Ad./Dis.
Ad./Dis.
Ad./Dis.
Ad./Dis.= advantage/disadvantage‡ The network input and output links must be mapped as well → s+1.
number of PEs used persub-simulator
execution time per simulation
inter-PE communication requirement
memory requirement per PE
overhead of box operations (e.g., for central memory buffering)
number of network sub-simulators
running inparallel
+
-
high
N*(s+1)
N*(s+1)
‡
low
low
low
high
high
+
-
-
NS
medium
medium
medium
medium
low
N*sB
medium
+
N*s
NS*B
-
±
±
±
+
-
+
+
-
low
low
high
high
high
low
N*s
NS*B*T
T*B
N*s
NxN network with BxB boxes consisting of s stages mapped onto a SIMD machine with NS processors
(N is a multiple of B)

31
Figure 7: A 16x16 multistage cube network with 4x4 switch boxes
sources destinations
stage 0 1
0
15
0
15

32
Figure 8: PE-interconnection structure of the MasPar MP-1 machine [3]
S1
S2
S3
three-stageglobal router
PEcluster
X-Net

33
Figure 9: Mapping of PEs on a BxB switch box with link mapping, shown for B=4
IB
OB
OB
IB
PEiPEn
PEp
PEr
OB
IBOB
IB
OB IB
OB IB
OB
IB
switch box
OB
IB
PEj
PEk
PEm
PEq
OB = output buffer IB = input buffer = PE

34
Figure 10: Routing conflict in a 2x2 switch box
switch boxi
= output buffer = input buffer = PEquiiquoi
PEi PEk
PEmPEj
stagej
quo0
quo1
qui0
qui1

35
Figure 11: Part of the inter-stage connection pattern pf a multistage cube network
stagei
B box0
boxB-1
boxB
boxN/B-1
box1
box0
box1B
B
B
B
B
B
B
B
B
B
B
B
B
B
B
B
B
B
B
B
B
boxN/B-1
stagei+1
boxN/B -12
boxN/B 2
box2N/B -12
gri+1= 0
gri+1= 1

36
Figure 12: Mapping of PEs on a BxB switch box with box mapping, shown for B=4
OB
OB
OB
OB
IB
IB
IB
IB
switch box
OB = output buffer IB = input buffer = PE
PE
37
Figure 13: PE distribution with box mapping, shown for a simulated network with 2x2 switch boxes
stage0
PE0quo0
quoi = output queue i of a switch box
sources
0
1
2
3
4
5
6
7
2+1
0
1
23
45
67
0
2
4
6
quo1
quo0
quo1
quo0
quo1
quo0
quo1
quo0
quo1
quo0
quo1
stage1
PE1
PE2
PE3
PEN
PEN
2

38
Figure 14: Complementary queue length distribution function DBU of a 1024x1024 network with 4x4
output buffered switch boxes, under uniform traffic with λ=0.7
1.00E-08
1.00E-07
1.00E-06
1.00E-05
1.00E-04
1.00E-03
1.00E-02
1.00E-01
1.00E+000 4 8 12 16 20 24
output buffer length l 0DBU (log scale)
+ = stage1
= stage5