status of the fiber optic control system integration ... · status of the fiber optic control...
TRANSCRIPT

NASA Technical Memorandum 106151
Status of the Fiber Optic Control SystemIntegration (FOCSI) Program
Robert J. BaumbickLewis Research CenterCleveland, Ohio
May 1993
NASA
https://ntrs.nasa.gov/search.jsp?R=19930018864 2018-07-09T17:27:16+00:00Z

STATUS OF THE FIBER OPTIC CONTROL SYSTEM INTEGRATION
(FOCSI) PROGRAM
Robert J. BaumbickNational Aeronautics and Space Administration
Lewis Research CenterCleveland, Ohio 44135
ABSTRACT
This report presents a discussion of the progress made in the NASA/NAVY Fiber Optic Control System Integration (FOCSI) program. Thisprogram will culminate in open-loop flight tests of passive opticalsensors and associated electro-optics on an F-18 aircraft. Cur-rently, the program is in the final stages of hardware fabricationand environmental testing of the passive optical sensors andelectro-optics.
This program is a foundation for future Fly-by-Light (FBL) pro-grams. The term Fly-by-Light is used to describe the utilization ofpassive optical sensors and fiber optic data links for monitoringand control of aircraft in which sensor and actuation signals aretransmitted optically. The benefits of this technology for advancedaircraft include: improved reliability and reduced certificationcost due to greater immunity to EME (electromagnetic effects),reduced harness volume and weight, elimination of short circuitsand sparking in wiring due to insulation deterioration, lower main-tenance costs (fewer components), greater flexibility in databusprotocol and architecture, absence of ground loops and higheroperating temperatures for electrically passive optical sensors.
INTRODUCTION
Fly-by-Light is used to describe the utilization of passive opticalsensors and fiber optic data links for monitoring and control ofaircraft in which sensor and actuation signals are transmittedoptically. The benefits of this technology for advanced aircraftinclude: improved reliability and reduced certification cost due togreater immunity to EME (electromagnetic effects), reduced harnessvolume and weight, elimination of short circuits and sparking inwiring due to insulation deterioration, lower maintenance costs(fewer components), greater flexibility in databus protocol andarchitecture, absence of ground loops and higher operatingtemperatures for electrically passive optical sensors. Table Iidentifies the benefits of optical technology for aircraft.
1
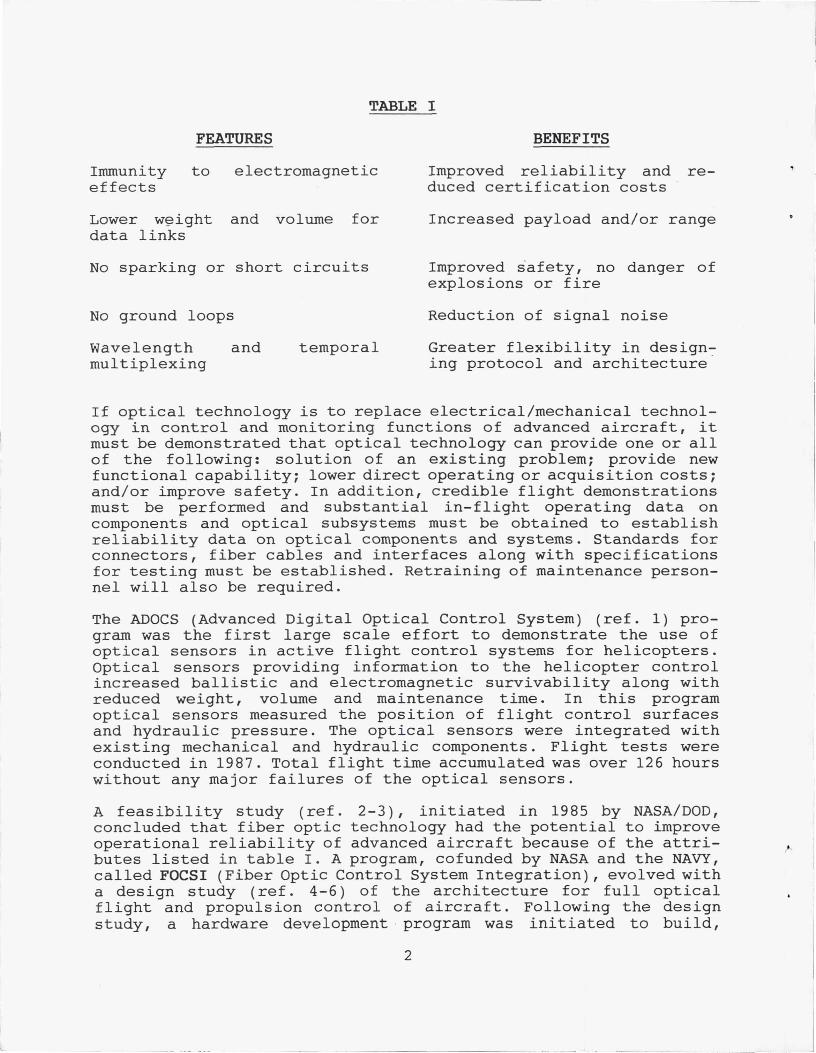
TABLE I
FEATURES BENEFITS
Immunity to electromagnetic Improved reliability and re-effects duced certification costs
Lower weight and volume for Increased payload and/or rangedata links
No sparking or short circuits
No ground loops
Wavelength and temporalmultiplexing
Improved safety, no danger ofexplosions or fire
Reduction of signal noise
Greater flexibility in design-ing protocol and architecture
If optical technology is to replace electrical/mechanical technol-ogy in control and monitoring functions of advanced aircraft, itmust be demonstrated that optical technology can provide one or allof the following: solution of an existing problem; provide newfunctional capability; lower direct operating or acquisition costs;and/or improve safety. In addition, credible flight demonstrationsmust be performed and substantial in-flight operating data oncomponents and optical subsystems must be obtained to establishreliability data on optical components and systems. Standards forconnectors, fiber cables and interfaces along with specificationsfor testing must be established. Retraining of maintenance person-nel will also be required.
The ADOCS (Advanced Digital Optical Control System) (ref. 1) pro-gram was the first large scale effort to demonstrate the use ofoptical sensors in active flight control systems for helicopters.Optical sensors providing information to the helicopter controlincreased ballistic and electromagnetic survivability along withreduced weight, volume and maintenance time. In this programoptical sensors measured the position of flight control surfacesand hydraulic pressure. The optical sensors were integrated withexisting mechanical and hydraulic components. Flight tests wereconducted in 1987. Total flight time accumulated was over 126 hourswithout any major failures of the optical sensors.
A feasibility study (ref. 2-3), initiated in 1985 by NASA/DOD,concluded that fiber optic technology had the potential to improveoperational reliability of advanced aircraft because of the attri- A,butes listed in table I. A program, cofunded by NASA and the NAVY,called FOCSI (Fiber Optic Control System Integration), evolved witha design study (ref. 4-6) of the architecture for full opticalflight and propulsion control of aircraft. Following the designstudy, a hardware development program was initiated to build,

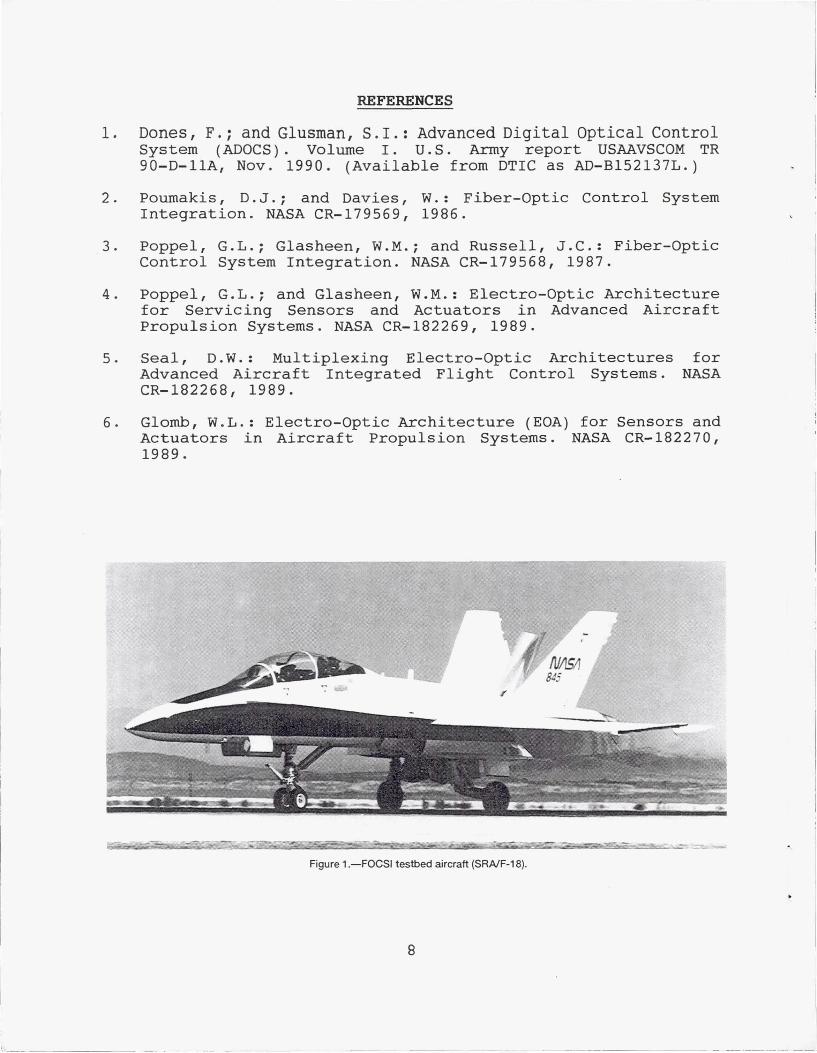
environmentally test and fly (in piggyback fashion) a represen-tative set of passive optical sensors for the flight and propulsionsystem of an advanced F-18 aircraft (fig. 1). In addition to pro-viding credible flight demonstrations of optical sensors andoptical components in an advanced aircraft environment, the FOCSIprogram also involved a significant number of sensor vendors withexperience in this technology area. As a result of the flight teststhe program will provide information on the installation, mainten-ance and operational problems in advanced aircraft. The remainingpart of this report will deal with the FOCSI hardware developmentprogram.
FOCSI HARDWARE DEVELOPMENT
Prior to the flight tests with the full set of FOCSI hardware, somepreliminary flight tests were conducted with four passive, opticalsensors installed and flown on another research aircraft (F15 HIDECtestbed) at NASA Dryden. This program was valuable to the vendorswho participated, enabling them to evaluate sensor performancethrough comparison with the production sensors. The optical sensorsflown included: a compressor inlet temperature sensor, (which usesfluorescent decay); PTO (power takeoff shaft) speed (which usesFaraday magneto-optic effect); turbine discharge gas temperature(which uses the blackbody radiation principle); and, PLA (powerlever angle, which uses a wavelength division multiplexed (WDM)code plate to measure position). Preliminary flight test data forthese sensors are shown in figure 2. Generally the sensors per-formed well and compared favorably with the production sensors.These sensors have flown for a minimum of 6 hours with some of thesensors collecting up to 12 hours of flight time. Valuable informa-tion on installation problems and handling problems was obtainedfrom these preliminary tests.
OPTICAL HARDWARE FOR PROPULSION CONTROL
The FOCSI propulsion sensors are shown in figure 3. The type ofmeasurement along with the optical modulation technique and thevendor supplying the sensor are also shown in this figure. Typicalsensors delivered for the flight tests are shown in figure 4. Thesensors were all environmentally tested to the MILSPEC requirementsfor engine mounted hardware. Sensor range specifications are shownin table II.
A wide variety of physical phenomena are employed in these sensorsfor converting the measurand into an optical effect that can bemeasured in an aircraft environment. Engine air inlet temperatureis measured by taking advantage of the temperature dependence ofthe fluorescence decay rate of certain crystals. The compressorinlet temperature sensor uses the Fabry Perot principle whichfilters or attenuates (through destructive interference) particular
3

wavelengths, depending on the optical path length of the FabryPerot cavity. The optical path length changes with temperaturethrough both a change in cavity spacing and index of refraction ofthe material in the cavity. Fan speed is measured by using thePockels effect. The Pockels effect is the change in index of 'refraction of certain birefringent crystals when subjected to anelectric field. The electric field variation is caused by couplinginto the- eddy current sensor used to measure fan speed. Compressorspeed is measured by using the Faraday effect. The Faraday effectcauses rotation of the polarization of incoming light when thelight passes through certain isotropic materials which have strongmagneto-optic characteristics. The optical speed sensor is locatedin the alternator. The magnetic field variation results from therotor of the alternator. Turbine discharge gas temperature ismeasured by detecting and measuring the amount of blackbody radia-tion, predictable from Planck's law, from a material heated by thehot gas. Actuator positions are measured by using WDM code plate orWDM (2 lambda) analog ratio. These WDM sensors operate on part orall of the spectrum of broad band light. The broad band light isdispersed unto the modulating medium (i.e., code plate or variabletransmissive medium.
The sensors will be integrated with a centralized electro-opticsmodule. The electro-optic architecture (EOA) is discussed furtherin the report.
OPTICAL HARDWARE FOR FLIGHT CONTROL
The FOCSI flight control sensors are shown in figure 5. Similarinformation, as provided for the propulsion sensors on the vendors,modulation techniques and parameters measured is provided in thisfigure. These sensors were also environmentally tested to MILSPECrequirements. Table II provides specifications for the sensorranges.
Most of the sensors in the flight control measure position. Theposition sensors cover a number of different optical modulationtechniques (WDM digital, analog, etc.). Other flight controlsensors measure pressure using an analog modulation techniquecalled microbending and an air data temperature sensor which usesthe same fluorescence decay optical modulation technique as is usedfor measuring engine inlet temperature.
Figure 6 is a drawing of the optical fiber runs in the aircraftalong with the number of connectors in each optical circuit.
Flight tests of the optical hardware will be performed on the F-18System Research Aircraft (SRA) at NASA Dryden. These tests will bepiggyback tests of the optical hardware with the data from theoptical sensors compared to comparable production sensors.
4

TABLE II
MEASUREMENT
Inlet temperatureCompressor inlet temperatureCompressor speedFan speedCompressor variable geometryFan variable geometryTurbine exhaust gas temperatureExhaust nozzle positionStabilizer positionRudder positionTrailing edge flap (TEF)Leading edge flap (LEF)Throttle lever angle (TLA)Nose wheel steering (NWS)Total pressure (air data)Air data temperaturePitch stick positionRudder pedal position
SPECIFICATIONS FOR RANGES
-65 to 300 degrees F-65 to 540 degrees F817 to 18553 rpm +/- .1% FS3981 to 15267 rpm +/- .1% FS-3.5 to 52.5 degrees0 to 2.7 inches700 to 2500 degrees F0 to 6.923 inches+/- 3.56 inches+/- .665 inches+/- 4.05 inches+/- 67.5 degrees+/- 65 degrees+/- 75 degrees1.25 to 80 inches Hg-100 to 450 degrees F+2.02 to -1.01 inches+/- .75 inches
ELECTRO-OPTIC ARCHITECTURE FOR PROPULSION AND FLIGHT SENSORS
One objective of this program is to develop a standard interfacefor the optical system. The sensor and electro-optics designers arerequired to meet the interface specifications for wavelength,optical power and data rates. The standard interface allows theelectro-optics to handle any type of optical sensor, attached toany connector port, requiring only a change in the software toaccommodate the sensors. Table III identifies the cards and cardfunctions for the electro-optics module.
TABLE III
Decode CPU
CARD FUNCTION
Supplies broadband light(750nm-950nm) to the sensors.Uses two LED's
Charge-coupled device (CCD)optical to electrical converter
Accepts electrical signals fromoptical receiver card and con-ditions data for CPU
Processes the data and convertsto engineering units
ELECTRO-OPTICS CARD
A/D optical source card
A/D optical receiver
Data acquisition card (DAC)
5

Time rate of decay (TRD) Custom card for fluorescencesensor
EOA CPU Conditions and formats data for1553 bus
Converts the electrical 1553 to1553/1773 converter optical 1773 data format
Power supply Supplies power to all modules
The flight control electro-optics module and cards installed in themodule are shown in figure 7 (a). A diagram of the electro-opticsis shown in figure 7 (b). The optical source card contains 10 LEDpairs (each pair has a 150 nm bandwidth). The LED's feed a 10 x 10port passive coupler connected to optical fibers, which are in turnconnected to the sensors. The large optical bandwidth is requiredby the digital code plate sensors. A smaller bandwidth source couldaccommodate the other sensors. The optical sources operate continu-ously 9 millisec (ms) on and 1 ms off. The 1 ms off period isrequired to clock out the data from the CCD array. The opticalreceiver consists of a 2-dimensional charge-coupled device (CCD)which is self-scanning. The optical signal from each sensor isfocused on a specific location of the 2-dimensional array. Sensor1 occupies row 1 followed by 3 blank rows, followed by sensor #2with 3 blank rows, etc. The sensor signals enter the opticalreceiver and are focused unto the CCD array. Prior to focussing,each optical signal passes through a dispersing element that sepa-rates the 150 nm modulated signal into as many as fifteen 10 nmstripes. The CCD array output is processed and formatted by the CPUand passed to the 1553/1773 processor card which sends the signalsto the data collection system onboard the aircraft. The fluores-cence sensor requires a separate sensor /electro-optics card toprovide a different specific wavelength range and to process theresulting optical signal. In the propulsion EOA, separate cards forthe fluorescence, blackbody and speed sensors are required.
The propulsion EOA has separate electro-optics cards for the speedsensors, exhaust gas temperature sensor and inlet temperaturesensor. The remaining sensors interface with the same EOA as usedin the flight control.
The configuration for collection of the data on the FOCSI aircraftis shown in figure 8. Each EOA provides a 1553 output data formatwhich is converted to the optically equivalent 1773 format and isthen transmitted to the aircraft data collection system where it isconverted back to the 1553 format for recording. The electro-opticsused for the conversion between 1553/1773 and 1773/1553 formats isbeing provided to the FOCSI program by the Navy. The hardware is aproduct of the Navy SHARP program (Standard Hardware for AvionicsResearch Program). The optical signals can then be compared to the
6

production electrical sensors which are located, in most casesadjacent to the optical sensors.
CONCLUDING REMARKS
Successful transition of Fly-by-Light technology to productionaircraft will depend on flight demonstrations similar to those inthe FOCSI program. Significant in-service time is required toestablish a reasonable history for the technology. The true bene-fits of this technology and it's impact on safety and aircraftcosts have yet to be evaluated. However, continued testing andcontinuous improvement in components must continue or this technol-ogy may never achieve it's full potential. The experience obtainedfrom this program is valuable in promoting optical technologytransfer to production aircraft, both military and commercial. Thisprogram will yield valuable information on the installation, main-tenance, troubleshooting and installed testing which will betransferred to the aircraft industry. This program also involves alarge number of vendors who have gained valuable experience inpackaging their particular product for an aircraft environment.
Problems of standardization of optical components as well asproduction challenges associated with integrating optical systemsinto aircraft need to be addressed. To complete this phase of theFly-by-Light program, a closed-loop flight demonstration of all-optical closed-loop operation of one or more control surfaces andthe propulsion system needs to be performed. A demonstration ofactive control will establish the true credibility of thistechnology.
7
REFERENCES
1. Dones, F.; and Glusman, S.I.: Advanced Digital Optical ControlSystem (ADOCS). Volume I. U.S. Army report USAAVSCOM TR90-D-11A, Nov. 1990. (Available from DTIC as AD-B152137L.)
2. Poumakis, D.J.; and Davies, W.: Fiber-Optic Control SystemIntegration. NASA CR-179569, 1986.
3. Poppel, G.L.; Glasheen, W.M.; and Russell, J.C.: Fiber-OpticControl System Integration. NASA CR-179568, 1987.
4. Poppel, G.L.; and Glasheen, W.M.: Electro-Optic Architecturefor Servicing Sensors and Actuators in Advanced AircraftPropulsion Systems. NASA CR-182269, 1989.
5. Seal, D.W.: Multiplexing Electro-Optic Architectures forAdvanced Aircraft Integrated Flight Control Systems. NASACR-182268, 1989.
6. Glomb, W.L.: Electro-Optic Architecture (EOA) for Sensors andActuators in Aircraft Propulsion Systems. NASA CR-182270,1989.
/M51are

400
Airspeed 200I
02600
Altitude 2400
2200
16000Optical sensor
— — — Production sensorCore — —
speed, 14000(RPM)
12000 I I I
0 10 20 30 40 50
Time of flight (sec)
(a) Core speed sensor; Faraday effect (Bendix Corp.).
400
Airspeed 200
020000
Altitude 10000
0
Optical sensor
Turbine 2000 — — — Production sensordischarge
gas 1000temperature
F) 0 20 40 60 60 100 120Time of flight (sec)
(b) Turbine discharge gas temperature; blackbody radiation (Conax Buffalo).
Figure 2—Flight test data of FOCSI sensors from F15 flights.
9

140
120
100Power 80leverangle, 60(deg)
40
20
015:41:45 15:42:15 15:42:45 15:43:15 15:43:45
Time
600
1 Airspeed 400
20080000
Altitude 40000
0
Compressor 400 Optical sensor
inlet – – – Production sensortemperature 0
-4000 200 400 600 800 1000 1200 1400 1600
Time of flight (sec)(c) Temperature sensor, time rate decay (Rosemount Corp.)
Optical sensor– _ – – Production sensor
(d) NASA Lewis PLA sensor, WDM digital.Figure 2.—Concluded.
10

Engine sensor, variable exhaustnozzle (BEJ)
Fan variable geometry 7 Compressor inletlinear position sensor; I temperature sensor; /—Turbine exhaust gasLitton/WDM digital code —7 1 Puget Sound/Fabry Perot / temperature sensor;
Inlet temperature sensor 1i Compressor variable geometry// Conax/BlackbodyRose mount/flourescent rotaposition sensor;decay RFIM/phA —1— +ice AB flame detector;
Core speed sensor; LBendix/Faraday effect -J Fan speed sensor;
Banks/Pockets effect`— Vaiable exhaust nozzle
linear position sensor;BEVWDM analog ratio
Figure 3.— FOCSI propulsion sensors.
Engine sensor Engine sensorCore speed sensor Turbine discharge temperature
Faraday effect Blackbody radiation(Bendix Corp.) (Conax Buffalo)
Engine sensor, Light-off detector (AMETEK)
Engine sensor, compressor variablegeometry (BEI)
Aircraft sensor Nose wheel steeringWDM (Allied Signal Bendix)
Figure 4.—FOCSI flight qualified optical sensors.
11

Rudder(Litton Poly-Scientific)
WDM LinearStabilizer
(Litton Poly-Scientific)WDM Linear—
T-- Trailing Edge Flap(BEI Motion Systems)
i Analog Gradient Filter Linear
- Pitch Stick(BEI Motion Systems)Analog Gradient Filter Linear
Power Lever Control(Litton Poly-Scientific)
WDM Rotary— - j
Air Data Temperature(Rosemount, Inc.)Fluorescent Time Rate of Delay
- Rudder Pedal(Litton Poly-Scientific)
\ WDM Lineari
Leading Edge Flap(Allied Signal - Bendix) r
WDM Rotary
iTotal Pressure
(Babcock & Wilcox)Analog Microbend
Figure S.— FOCSI flight control sensors.
i vi
Electro-Optic Architecture(Litton Poly-Scientific)
12

J
Rudder Power Lever Control
(Litton Poly-Scientific) (Litton Poly-Scientific)
Stabilizer Air Data Temperature(Litton Poly-Scientific) (Rosemount, Inc.)
Aileron Pitch Stick(BEI Motion Systemsf-- (BE/ Motion Systems)
Leading Edge Flap Rudder Pedal
(Allied Signal-Bendix) (Litton Poly-Scientific)
Electro-Optic Architecture Total Pressure(Litton Poly- Scientific) (Babcock & Wilcox)EOA Nose Wheel Steering
(130 Motion Systems)250 Inches
RNose Wheel Steering Sensor
650 Inches
Leading Edge Flap Sensor
7001nches
Power Lever Control Sensor
550 InchesRudder Sensor
575 Inches Stabilizer Sensor
300 InchesRudder Pedal Position Sensor
300 Inches Air Data Temperature Probe
Fiber Length 200 Inches Pitch Stick Position SensorNo Bulkhead Connectors
550 Inches
Aileron Sensorr--r Air DataFiber Optic Total Computer
Pressure Sensor New Existing Pneumatic LinePneumatic o0o
Line
48 Inches Pitot Tube
= Bulkhead Connectors Pneumatic Tee Section
Figure 6.—Aircraft optical fiber runs and connectors for FOCSI.
13

sEws ,module ^ 1553 board'
^
/
^'
gig
^ ^^ ~^, 1773 board*
^~ -Supplied uy Naval x"ivn:csCenter
(a) poos/eoA built »y LITTON, Aircraft sVAaemsmodule.
----- ---------
o tical fit ,,: , Parallel11 ZAD
100/140 micronoptical fiber Source card I
Drive Data acquisition card
Outgoing spectrum ParallelCL 110Drive
CL Cz
750 950
DriveControlstate machine
Address
C
-\7 decode
WDIVI SRAM
AnalogReceiver card
WDM(3 modules)
Analog 0
processing100/140 micron Fiber
optical fiber array
bulkhead I GRIN lens : (View from
CCD
;;;OGor at, ^n 2—9 array
(b)vvoIVIsoA functional block oiagmm.
Figure 7 EI ectro- optics unit for flight control.
Processorcard
2
^
14

Airfame EOA (MCAIR)Flight control Optical
Electrical data . 1-TRD• 1-WDM source
data • 1-WDM receiver0 0 • 1-CPU /1 553 RT0 • 1-1553 controller
• 2-1773 converters
9data
• 1 -Power supplyAirborne data
acquisition --- interface --- Fiber optic data bus (NASA) Electrical data bus
O O I data OpticalL----
Engine EOA (General Electric)• 1-WDM position
0 0 0 • 1-WDM speedMission
computerMaintenancesignal data
Electrical data • 1-T1 tempO O • 1-T5 temp
• 1-LOD EOA(Bus converter • 1-1573 bus interface
controller) • 1-Power supply
Figure 8.—FOCSI architecture for on board flight test data collection
15
Form ApprovedREPORT DOCUMENTATION PAGE OMB No. 0704-0188
Public reporting burden for this collection of information is estimated to average 1 hour per response, including the time for reviewing instructions, searching existing data sources,gathering and maintaining the data needed, and completing and reviewing the collection of information. Send comments regarding this burden estimate or any other aspect of thiscollection of information, including suggestions for reducing this burden, to Washington Headquarters Services. Directorate for Information Operations and Reports, 1215 JeffersonDavis Highway, Suite 1204, Arlington, VA 222024302, and to the Office of Management and Budget, Paperwork Reduction Project (0704-0188), Washington, DC 20503.
1. AGENCY USE ONLY (Leave blank) 2. REPORT DATE 3. REPORT TYPE AND DATES COVERED
May 1993 Technical Memorandum4. TITLE AND SUBTITLE 5- FUNDING NUMBERS
Status of the Fiber Optic Control System Integration (FOCSI) Program
WU-505-62-506. AUTHOR(S) -
Robert J. Baumbick
7- PERFORMING ORGANIZATION NAMES) AND ADDRESS(ES) 8. PERFORMING ORGANIZATIONREPORT NUMBER
National Aeronautics and Space AdministrationLewis Research Center E-7832Cleveland, Ohio 44135-3191
9- SPONSORING/MONITORING AGENCY NAME(S) AND ADDRESS(ES) 10. SPONSORING/MONITORINGAGENCY REPORT NUMBER
National Aeronautics and Space AdministrationWashington, D.C. 20546-0001 NASA TM-106151
11. SUPPLEMENTARY NOTES
Responsible person, Robert J. Baumbick, (216) 433-3735.
12a. DISTRIBUTION/AVAILABILITY STATEMENT 12b. DISTRIBUTION CODE
Unclassified - UnlimitedSubject Category 35
13. ABSTRACT (Maximum 200 words)
This report presents a discussion of the progress made in the NASA/NAVY Fiber Optic Control System Integration(FOCSI) program. This program will culminate in open-loop flight tests of passive optical sensors and associatedelectro-optics on an F-18 aircraft. Currently, the program is in the final stages of hardware fabrication and environ-mental testing of the passive optical sensors and electro-optics. This program is a foundation for future Fly-by-Light(FBL) programs. The term Fly-by-Light is used to describe the utilization of passive optical sensors and fiber opticdata links for monitoring and control of aircraft in which sensor and actuation signals are transmitted optically. Thebenefits of this technology for advanced aircraft include: improved reliability and reduced certification cost due togreater immunity to EME (electromagnetic effects), reduced harness volume and weight, elimination of shortcircuits and sparking in wiring due to insulation deterioration, lower maintenance costs (fewer components), greaterflexibility in databus protocol and architecture, absence of ground loops and higher operating temperatures forelectrically passive optical sensors.
14. SUBJECT TERMS 15. NUMBER OF PAGES17
Fiber optics; Optical sensors; Fiber optic based controls; Fly-by-light 16. PRICE CODEA02
17. SECURITY CLASSIFICATION 18. SECURITY CLASSIFICATION 19. SECURITY CLASSIFICATION 20. LIMITATION OF ABSTRACTOF REPORT OF THIS PAGE OF ABSTRACT
Unclassified Unclassified Unclassified
NSN 7540-01-280-5500 Standard Form 298 (Rev. 2-89)Prescribed by ANSI Std. Z39-18298-102