starmac the stanford testbed of autonomous rotorcraft for multi-agent control gabe hoffmann, haomiao...
Post on 21-Dec-2015
216 views
TRANSCRIPT

STARMACThe Stanford Testbed of Autonomous Rotorcraft forMulti-Agent Control
Gabe Hoffmann, Haomiao Huang, Vijay Pradeep, Steven WaslanderAeronautics and Astronautics, Stanford University
Claire TomlinAeronautics and Astronautics, Stanford UniversityElectrical Engineering and Computer Science, UC Berkeley
MURI Review Meeting
Frameworks and Tools for High-Confidence Design of Adaptive, Distributed Embedded Control Systems
Berkeley, CA
September 6, 2007
2
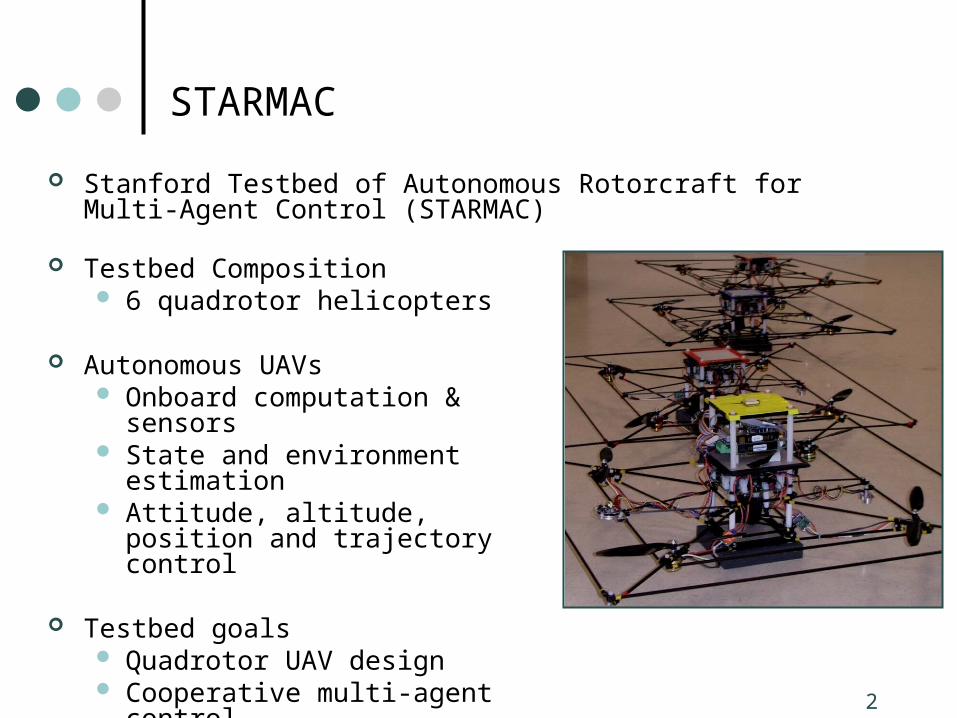
STARMAC
Testbed Composition 6 quadrotor helicopters
Autonomous UAVs Onboard computation & sensors State and environment estimation Attitude, altitude, position and
trajectory control
Testbed goals Quadrotor UAV design Cooperative multi-agent control Mobile sensor networks
Stanford Testbed of Autonomous Rotorcraft for Multi-Agent Control (STARMAC)
3
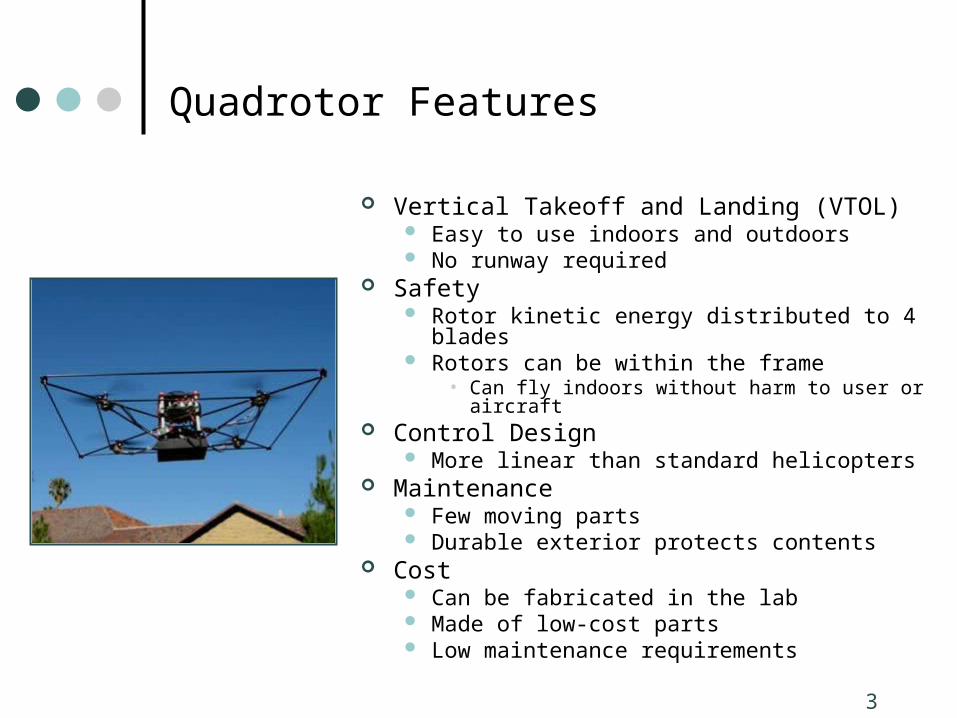
Quadrotor Features
Vertical Takeoff and Landing (VTOL) Easy to use indoors and outdoors No runway required
Safety Rotor kinetic energy distributed to 4 blades Rotors can be within the frame
• Can fly indoors without harm to user or aircraft Control Design
More linear than standard helicopters Maintenance
Few moving parts Durable exterior protects contents
Cost Can be fabricated in the lab Made of low-cost parts Low maintenance requirements
4
STARMAC Development

5
STARMAC Quadrotor Helicopter
BatteryLithium Polymer
BrushlessDC MotorsAxi 2208/26
Sonic RangerSRF08
Inertial MeasurementUnit (IMU)3DMG-X1
High LevelControl Processor
Stargate SBCor PC/104
Low Level Control Processor
Robostix
GPSSuperstar II
Electronic Speed
ControllerPhoenix 25
Plastic Tube Straps
Carbon Fiber Tubing
Fiberglass Honeycomb
LIDARHokuyo
URG-04LX
Stereo VisionVidere Systems
Small Vision System

6
Quadrotor Helicopter Actuation
Yaw Torque
Roll/Pitch Torque Total Thrust
Two pairs of counter rotating blades provide torque balance
Angular accelerations and vertical acceleration are controlled by varying the propeller speeds.
7
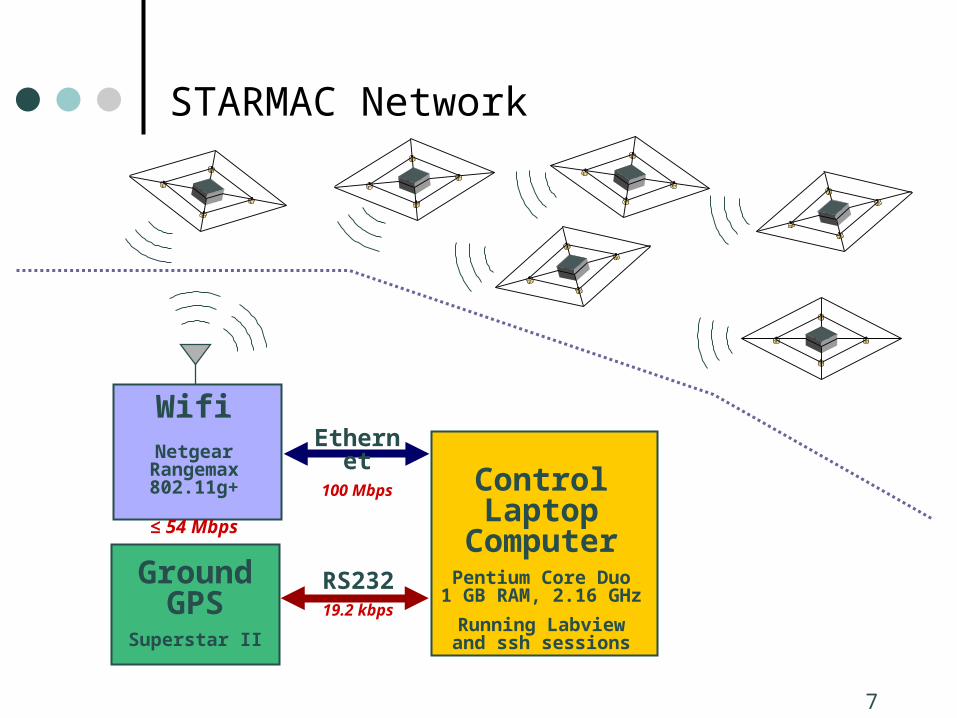
STARMAC Network
WifiNetgear
Rangemax 802.11g+
≤ 54 Mbps
GroundGPS
Superstar II
Control Laptop
ComputerPentium Core Duo
1 GB RAM, 2.16 GHz
Running Labview and ssh sessions
RS23219.2 kbps
Ethernet100 Mbps
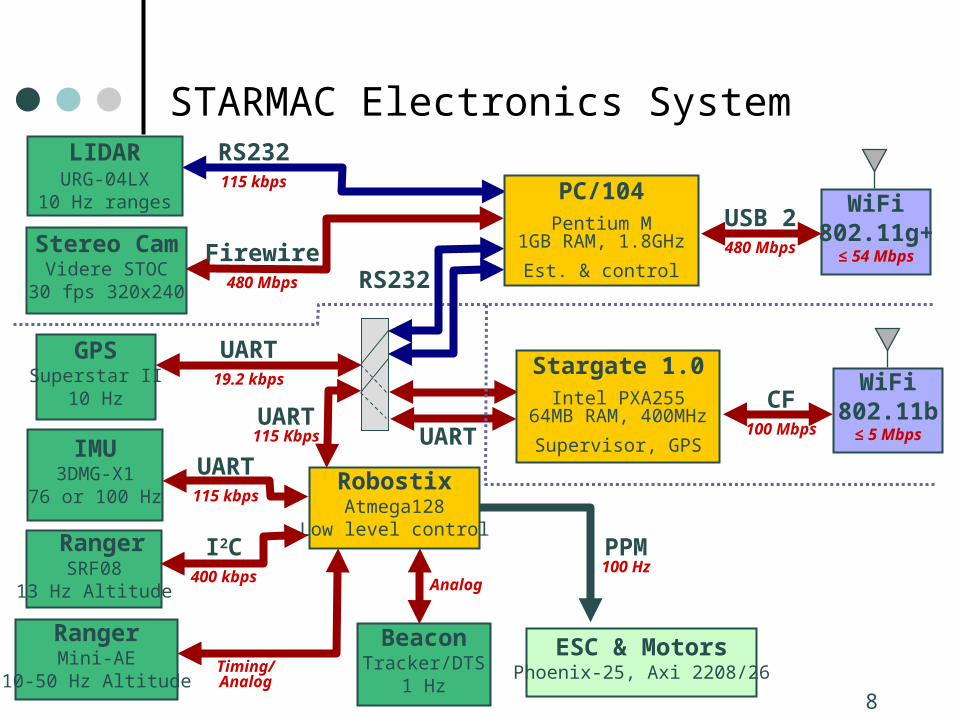
8
STARMAC Electronics System
WiFi802.11b
≤ 5 Mbps
ESC & MotorsPhoenix-25, Axi 2208/26
IMU3DMG-X1
76 or 100 Hz
RangerSRF08
13 Hz Altitude
GPSSuperstar II
10 Hz
I2C400 kbps
PPM100 Hz
UART19.2 kbps
RobostixAtmega128
Low level control
UART115 kbps
CF100 Mbps
Stereo CamVidere STOC
30 fps 320x240
Firewire480 Mbps
UART115 Kbps
LIDARURG-04LX
10 Hz ranges
RangerMini-AE
10-50 Hz Altitude
BeaconTracker/DTS
1 Hz
WiFi802.11g+
≤ 54 Mbps
USB 2480 Mbps
RS232115 kbps
Timing/Analog
Analog
RS232
UART
Stargate 1.0Intel PXA255
64MB RAM, 400MHz
Supervisor, GPS
PC/104Pentium M
1GB RAM, 1.8GHz
Est. & control

9
Low Level Control
Event Driven Real-time execution based on
Known transmission / receipt rates Measurement of code chunk execution times
Fault Tolerant Communication
IMU RX
SG RX
SG TX
IMU TX
Main
(this is an asynchronous event)

10
Information Seeking Target Localization
Applications
Decentralized Collision Avoidance

11
COMMCLASS
GUI & Storage
Sensor Processing
Controller
Planner
Real TimeController
GPS
LIDAR
ROBO
GND
Estimator
GPSCalc
StateEstimator
GPS comm
Lidar comm
GND comm
Flyers Flyer comm
GUI (10 Hz)
Logging
EnviroLIDAR
Robo comm
signalserialUDP
Interfaces
Fcn call
all
all
any
“Flyer Brain” Architecture

12
Questions?… and demo…