solist: structure multi-couche pair-à-pair à faible ... · campus universitaire ... ceux-ci...
TRANSCRIPT
HAL Id: inria-00338130https://hal.inria.fr/inria-00338130
Submitted on 11 Nov 2008
HAL is a multi-disciplinary open accessarchive for the deposit and dissemination of sci-entific research documents, whether they are pub-lished or not. The documents may come fromteaching and research institutions in France orabroad, or from public or private research centers.
L’archive ouverte pluridisciplinaire HAL, estdestinée au dépôt et à la diffusion de documentsscientifiques de niveau recherche, publiés ou non,émanant des établissements d’enseignement et derecherche français ou étrangers, des laboratoirespublics ou privés.
SOLIST : Structure multi-couche pair-à-pair à faibleconsommation pour les réseaux de capteurs sans-fil
Yann Busnel
To cite this version:Yann Busnel. SOLIST : Structure multi-couche pair-à-pair à faible consommation pour les réseaux decapteurs sans-fil. Conférence Francophone sur les Systèmes d’Exploitation - 6ème édition, Feb 2008,Fribourg, Suisse. 2008. <inria-00338130>

RenPar’18 / SympA’2008 / CFSE’6Fribourg, Suisse, du 11 au 13 février 2008
SOLIST : Structure multi-couche pair-à-pair à faible consommation
pour les réseaux de capteurs sans-fil.
Yann Busnel∗ (IRISA / Université de Rennes 1)
Institut de Recherche en Informatique et Systèmes Aléatoires,Campus Universitaire de Beaulieu,35042 Rennes Cedex - France – [email protected]
Résumé
Les réseaux de capteurs sans-fil (RCsF) connaissent depuis quelques années un intérêt croissant, tant dans la re-cherche qu dans l’industrie. Ceux-ci ouvrent une nouvelle voie aux applications réparties dans des milieux jus-qu’alors impraticables, les capteurs s’auto-organisant eux-même afin de fournir des fonctionnalités telles que lacollecte ou la dissémination d’information sur et dans le réseau, le routage de messages à des capteurs spécifiques,etc. En raison de leur petite taille, les ressources disponibles sur un capteur sont très limitées, et la gestion d’énergiedevient donc une préoccupation de premier ordre.Le cœur des systèmes de gestion de données dans les systèmes répartis repose sur certaines fonctionnalités de basestelles que la diffusion ou la recherche de capteurs particuliers. Dans cet article, nous proposons la mise en œuvredécentralisée d’une collection de primitive appelées *-cast (anycast, k-cast et broadcast). Pour cela, nous présentonset évaluons SOLIST, une structure multi-couche, largement inspirée des réseaux pair-à-pair structurés, limitant laconsommation d’énergie dans le cadre des RCsF. Un type est associé à chaque capteur, et les primitives de *-castsont mises en œuvre à la granularité des types, sans pour autant nécessiter une connaissance de ces types à priori,ni de leur répartition dans le réseau. Nous avons évalué SOLISTpar simulation et montré que cette structure fournitles primitives de *-cast en atteignant un bon compromis entre performance et consommation d’énergie.
Mots-clés : Réseaux de capteurs, réseaux structurés, primitive de diffusion, économie d’énergie
1. Introduction
Rechercher une information précise dans un réseau large-échelle non-structuré revient à chercher uneaiguille dans une botte de foin sans détecteur de métaux ! La recherche de fichiers rares dans les systèmesde partage de fichier pair-à-pair (PàP) illustre parfaitement cette propriété. Alors que l’inondation estdéconseillé dans les réseaux filaires, elle se révèle inexploitable dans les réseaux de capteurs sans-fil(RCsF), pour lesquels l’économie d’énergie est prédominante. En effet, les RCsF sont composés d’ungrand nombre de petites entités ne possédant pas les mêmes ressources qu’un micro-ordinateur usuel.En raison de leur petite taille, ces objets, équipés d’un module de communication sans-fil et appeléscapteurs par la suite, ne disposent que de faibles ressources (en terme de mémoire, processeur, batterie,etc.). La consommation d’énergie est donc une préoccupation de premier ordre dans la conception deces réseaux.Contrairement aux systèmes répartis classiques, les RCsF sont déployés et configurés en général pourles besoins d’une application spécifique, telle que la surveillance, l’inventaire, l’agrégation de données,etc. Cependant, certaines fonctionnalités de base sont communes à la plupart de ces applications. Nousavons identifié un ensemble de primitives de communication, celles-ci correspondant en quelques sortesaux briques de base de celles-ci. Nous appellerons *-cast cet ensemble, composé des primitives de broad-cast, anycast et k-cast. La primitive d’anycast consiste à trouver un nœud quelconque dans un sous-ensemble spécifique du réseau. La primitive de k-cast consiste a joindre, sans distinction, k nœuds d’unsous-ensemble du réseau. Enfin, la primitive de broadcast nécessite de contacter tous les nœuds de ce
∗
Travaux réalisés en collaboration avec Marin Bertier (IRISA / INSA Rennes) et Anne-Marie Kermarrec (INRIA Rennes – BretagneAtlantique)
sous-sensemble. Par exemple, considérons une application d’inventaire, où chaque capteur représenteun objet physique d’un type donné. Envoyer un message à tous les capteurs d’un tel type ou interrogerle système sur la présence d’un objet d’un type spécifique sont des taches usuelles, issues de l’utilisationde la collection *-cast.Nous considérons ici un système dans lequel chaque capteur possède un type associé. Dans cet article,nous proposons SOLIST (Self-Organized Large-scale and lightweight Information-based Sensor Technology),un réseau structuré multi-couches à faible consommation d’energie pour les RCsF incluant une implé-mentation efficace de la collection *-cast en terme d’économie d’énergie et de fiabilité2. SOLIST proposedonc une interface générique pour les applications dans le contexte des RCsF (groupement par type etcollection *-cast).Afin de mettre en oeuvre les primitives de la collection *-cast, SOLIST se fonde sur une structure multi-couches légère. Les capteurs sont groupés ensemble, par type, au sein de sur-couches spécifiques. Lesprimitives de broadcast et k-cast sont mises en œuvre au niveau de ces sur-couches. SOLIST proposeégalement une primitive efficace d’anycast, laquelle peut être utilisée seule pour les besoins de l’appli-cation, ou pour déterminer un point d’entrée dans une sur-couche particulière.Cet article est organisé comme suit : Les sections 2 et 3 introduisent respectivement le modèle du sys-tème et l’interface générique. La structure de SOLIST est introduite dans la section 4. Étant donnée lacontrainte d’espace de cet article, nous ne pouvons développer les détails de mise en œuvre de la col-lection *-cast dans SOLIST, mais celle-ci sera abordée succinctement en fin de section (paragraphe 4.4).Différents scénarios ont été simulés et comparés avec des mécanismes traditionnels (marche aléatoire etinondation). Nous présentons un sous-ensemble des résultats d’évaluation dans la section 5 avant deconclure en section 6. Une description plus précise des mises en œuvres, des évaluations et de l’état del’art est disponible dans [2].
2. Pré-requis du système
Nous considérons un réseau composé de n capteurs sans-fil, répartis dans un espace géographique don-née. Bien qu’aucune hypothèse ne soit imposée sur la répartition des nœuds, la topologie doit assurerla connectivité du réseau. Nous ne considérons que des capteurs non-mobiles, mais ceux-ci peuventdevenir indisponible, en raison d’une défaillance ou de la consommation complète de leur batterie. Demême, dans ce cas, l’hypothèse de connectivité doit rester valide, le système ne supportant pas le par-titionnement du réseau. Chaque capteur ne peut communiquer qu’en émission à 1 saut avec les nœudssitués dans son rayon de transmission, via un canal de communication idéal (i.e. sans collision, ni pertede message). De plus, le temps de propagation d’un message entre deux nœuds du réseau doit êtreborné, cette borne étant connue.Chaque nœud connaît sa position géographique relative dans un système de cordonnées virtuelles, ainsique la taille de ce système. Nous ne proposons pas dans ces travaux une méthode de construction de cesystème de coordonnées, mais, étant donnée un RCsF statique, les coordonnées relatives peuvent êtrecalculées localement lorsque qu’un nœud rejoint le réseau, comme proposé dans [6, 9]. Aucun ensemblede type pré-défini n’est requis.Afin de découvrir son voisinage, tout nœud diffuse localement et périodiquement un message d’exis-tence. Dans la nécessité d’obtenir une communication multi-saut, tout protocole de routage géogra-phique peut être utilisé sur le réseau, s’il vérifie qu’un nœud peut envoyer des messages à un autrenœud, ne connaissant que sa position dans le système de coordonnées virtuelles. Dans le cadre de nosexpérimentations, le protocole GPSR [5] a été utilisé, permettant notamment de trouver efficacement lenœud le plus proche de coordonnées virtuelles données.
3. La collection *-cast
Une grande majorité des applications réparties reposent sur les mêmes fonctionnalités. Plus spécifi-quement, dans les RCsF, il est souvent nécessaire de contacter des nœuds en fonction de leur catégorie.SOLIST fourni un ensemble de fonctionnalités de base, appelés collection *-cast et reposant sur une struc-ture de groupe. A un temps donnée, chaque nœud possède un type représentant son état. Celui-ci peut
2Notre définition de la fiabilité correspond à la résolution actualisée d’une requête de la collection *-cast.
2

être soit statique (si le réseaux est composé de capteurs hétérogènes, par exemple, chaque forme de cap-teur sera lié à un identifiant particulier pour toute la durée de l’application), soit dynamique (représentantle niveau d’énergie restante, ou des valeurs de données captés). Dans le premier cas, la valeur du typeest fixée de façon pérenne pour toute la durée de l’application, contrairement au second, dans lequelcette valeur peut changer éventuellement au cours de l’exécution. De plus, un nœud peut ne pas avoirde type (temporairement ou non) et ne participera alors qu’à la connectivité globale et au routage sur leréseaux. SOLIST assure que tous les nœuds de même type sont regroupé ensemble dynamiquement.Nous avons identifié les trois briques de base suivante :
Primitive d’anycast ANYCAST(type) ;Cette primitive permet d’obtenir le contact d’un nœud parmi tous les nœuds d’un type donné.Par exemple, cette fonctionalité peut être utilisée afin de vérifier si au moins une instance d’untype donné existe dans le système, et dans l’affirmative, de localiser une de celles-ci.
Primitive de k-cast KCAST(type, k) ;Cette primitive permet de contacter k nœud d’un type donné, s’il en existe suffisamment dans le réseau.Si le groupe contient plus de k nœuds, la primitive renverra VRAI, ainsi que des informations optionnellesdépendantes de l’application, et FAUX sinon.Par exemple, un gestionnaire de stock a communément besoin de savoir si une marchandise estdisponible en quantité suffisante. La primitive k-cast devient alors essentielle dans une applicationd’inventaire. Une autre application classique des RCsF est la surveillance de feus de forêt. Il peutêtre utile de connaître si le réseau contient au moins 10 capteurs ayant mesuré une températuresupérieure à 40 degrés Celsius ou une hygrométrie supérieure à 2 %vol. Dans ce cas, une valeurmoyenne sur un échantillon de nœuds d’un type donné pourrait être requise. La primitive k-castrépond idéalement à ce type de demande.
Primitive de broadcast BROADCAST(type) ;Cette primitive permet de contacter tous les nœuds d’un type donné. Des informations optionnelles sur lesnoeuds de cet ensemble peuvent être attaché au message réponse, telles que le nombre de nœuds de ce type,la moyenne de leur valeur mesurée, etc.Dans SOLIST, la primitive de broadcast diffuse un message uniquement aux nœuds du même type.Ce service peut donc être vu comme du multicast. Ce type de fonctionnalité peut être utilisé pourdisséminer de l’information à un ensemble de nœuds de type donné comme dans une applica-tion de publication/abonnement par exemple. Il peut également être utilisé pour comptabiliser lenombre d’entités d’un même type disponibles dans un stock.
Chaque nœud possède deux primitives supplémentaires :
Rejoindre le système JOIN(type) ;Lors de l’arrivée d’un nœud dans un RCsF existant, celui-ci peut contacter un nœud appartenantdéjà au réseau, et exécuter des tâches classiques d’initialisation, d’anonce de sa présence à sonvoisinage direct, de connexion à d’éventuelles structure, etc. Plus de détails sur cette primitivesont disponibles ci-après.
Quitter le système LEAVE(type) ;Lors du départ déterminé d’un nœud, celui-ci doit effectuer une procédure de départ afin d’éviterles incohérences potentielles des structures, mettre à jour l’information sur ses voisins, etc. Si unnœud quitte le réseau sans exécuter cette procédure, il sera considéré comme défaillant.
Dans le cas de types dynamiques, à chaque changement de type d’un nœud, ce dernier commencera parquitter le réseau afin de quitter son groupe actuel, puis de revenir avec un type mis à jour et rejoindreun groupe différent, si besoin est.SOLIST peut etre utilisé dans le contexte de nombreuses applications, comme mentionné ci-avant. Parexemple, nous pouvons citer les applications classiques suivantes :
Surveillance Dans ces applications, les utilisateurs ont besoin de connaître combien de capteurs sontdans un état donné, à un temps donné. Par l’utilisation du groupement dynamique (des capteursdans le même état) et de la collection *-cast dans ces groupes, nous pouvons obtenir la plupart desinformations sans recourir à l’utilisation d’un langage de requête particulier comme dans [7] ;
3
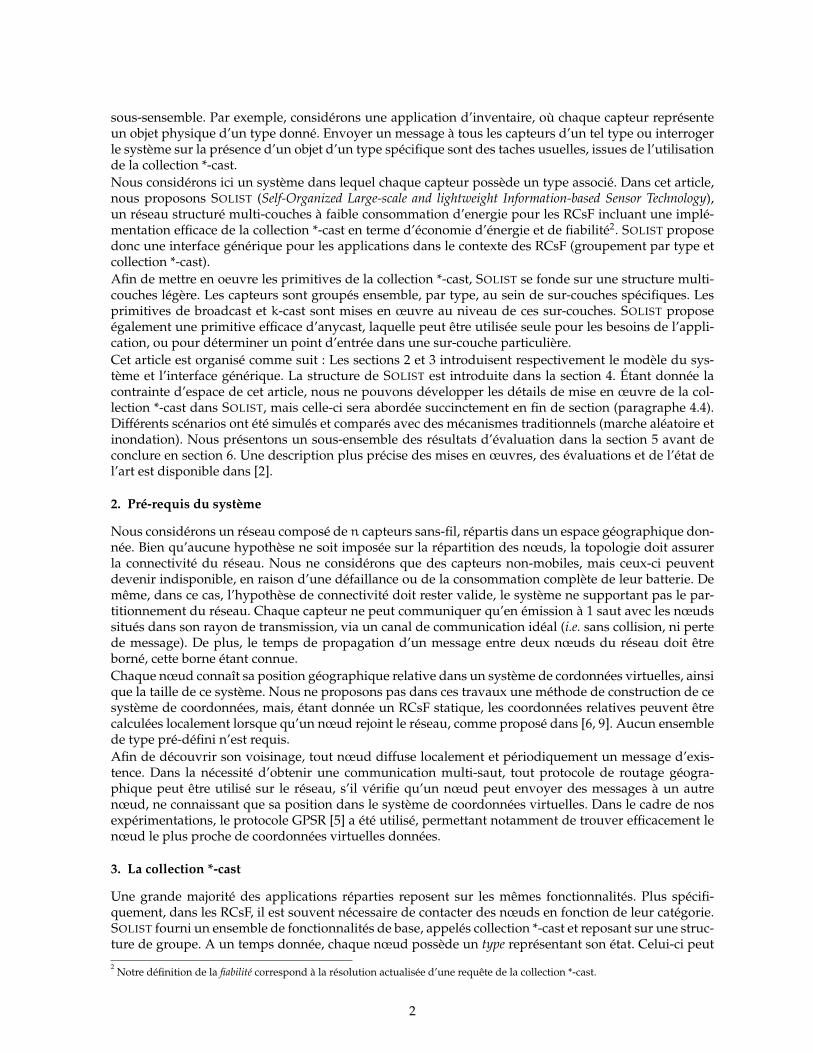
FIG. 1 – Projection des groupes en sur-couche
ep3(1)
ep1(1)
ep2(1)
ep4(1)
ep5(1)
ep3(5)
ep1(5)
ep2(5)
ep4(5)
ep5(5)
ep3(3)
ep1(3)
ep2(3)
ep4(3)
ep5(3)
ep3(4)
ep1(4)
ep2(4)
ep4(4)
ep5(4)
ep3(2)
ep1(2)
ep2(2)
ep4(2)
ep5(2)
ep3(6)
ep1(6)
ep2(6)
ep4(6)
ep5(6)
i
FIG. 2 – Exemple d’une division de l’espace en 3×2
cellules.Le nœud i envoi sa requête de recherche de LIGH-1-LAYER au point d’entrée le plus proche : ep1(2)
Gestion de stock Les applications de ce type doivent permettre au gestionnaire d’obtenir dynamique-ment la réponse à trois questions fondamentales : y-a-t-il un élément d’un type donné dans lestock ? Y-en a-t-il en quantité suffisante ? Combien d’éléments exactement y-a-t-il ? La collection*-cast répond directement à ces questions (respectivement les primitives d’anycast, de k-cast et debroadcast) ;
Nous pouvons également citer quelques utilisations génériques de SOLIST :
Diffusion Cette application est inhérente à la collection *-cast. Les primitives de k-cast et de broadcastfournissent respectivement les fonctionnalités de multicast bornée ou non. Pour contacter différentsgroupes de nœuds dans le réseau, il suffit d’émettre une requête de broadcast pour chacun de cesgroupes.
Agrégation En utilisant la primitive de broadcast avec réponse présentée ci-dessus, les informationsdisponibles sur tout un groupe peuvent être collectées et agrégées simplement vers l’émetteur dela requête.
4. Fonctionnement de SOLIST
Dans cette partie, nous présentons l’architecture de SOLIST.
4.1. Une structure multi-couche
Dans l’optique de fournir efficacement la collection *-cast, SOLIST se fonde sur une structure multi-couches.Premièrement, tous les nœuds font partie d’une couche de base, utilisée pour assurer la connectivitéglobale du réseau et le routage géographique3. Cette couche sera appelée couche de routage par la suite.Elle permet de contacter une destination quelconque en utilisant uniquement ses coordonnées virtuelles,présentées dans la partie 2.De plus, au-dessus de cette couche de routage, SOLIST met en œuvre différentes sur-couches logiqueslégères (une par groupe existant dans le réseau). La structure de ces sur-couches est présentée ci-après,en section 4.2. Cette structure multi-couche fourni un groupement logique des noeuds du réseau. Parexemple, dans la figure 1, n nœuds de trois types différents sont disposés dans un RCsF. À chacun destypes données correspond une sur-couche spécifique (i.e. celle des triangles, des ronds et des carrés), au-dessus de la couche de routage. Cette dernière est utilisée pour les communications entre deux nœudsd’une même sur-couche, situés hors de portée directe.
3Le protocole de routage utilisé dans notre implémentation est une version allégée de GPSR [5]
4
4.2. Structure d’une sur-couche : LIGH-t-LAYER
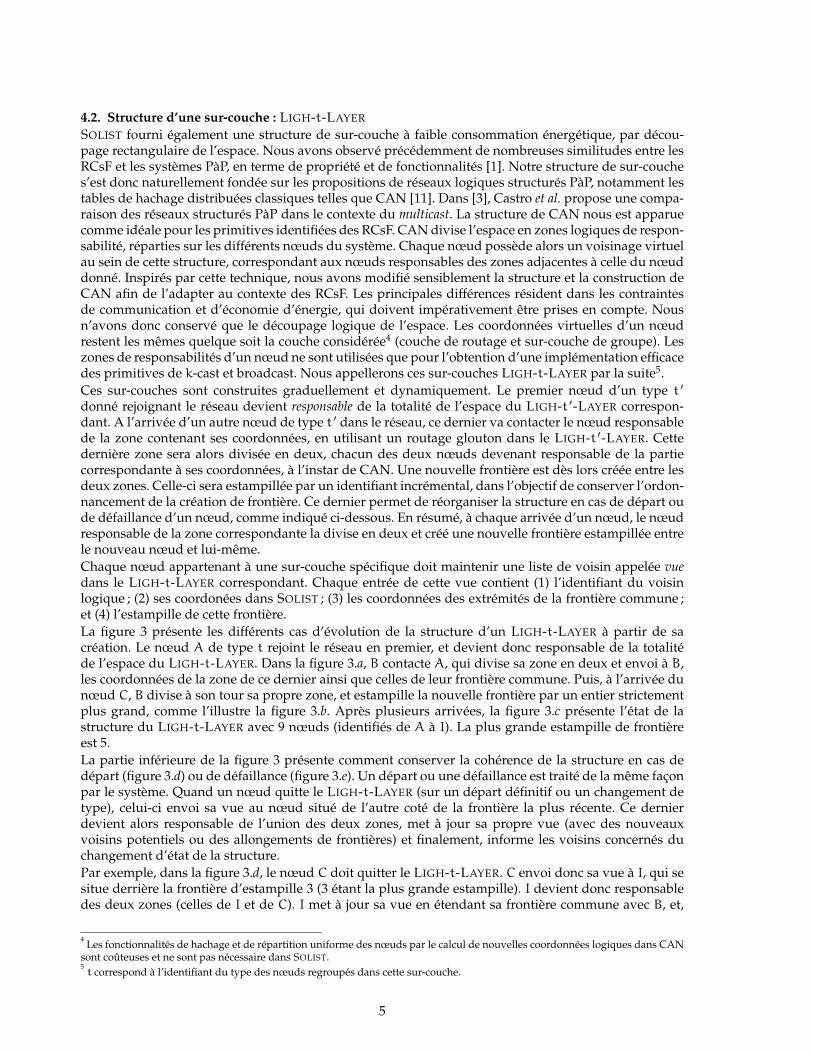
SOLIST fourni également une structure de sur-couche à faible consommation énergétique, par décou-page rectangulaire de l’espace. Nous avons observé précédemment de nombreuses similitudes entre lesRCsF et les systèmes PàP, en terme de propriété et de fonctionnalités [1]. Notre structure de sur-couches’est donc naturellement fondée sur les propositions de réseaux logiques structurés PàP, notamment lestables de hachage distribuées classiques telles que CAN [11]. Dans [3], Castro et al. propose une compa-raison des réseaux structurés PàP dans le contexte du multicast. La structure de CAN nous est apparuecomme idéale pour les primitives identifiées des RCsF. CAN divise l’espace en zones logiques de respon-sabilité, réparties sur les différents nœuds du système. Chaque nœud possède alors un voisinage virtuelau sein de cette structure, correspondant aux nœuds responsables des zones adjacentes à celle du nœuddonné. Inspirés par cette technique, nous avons modifié sensiblement la structure et la construction deCAN afin de l’adapter au contexte des RCsF. Les principales différences résident dans les contraintesde communication et d’économie d’énergie, qui doivent impérativement être prises en compte. Nousn’avons donc conservé que le découpage logique de l’espace. Les coordonnées virtuelles d’un nœudrestent les mêmes quelque soit la couche considérée4 (couche de routage et sur-couche de groupe). Leszones de responsabilités d’un nœud ne sont utilisées que pour l’obtention d’une implémentation efficacedes primitives de k-cast et broadcast. Nous appellerons ces sur-couches LIGH-t-LAYER par la suite5.Ces sur-couches sont construites graduellement et dynamiquement. Le premier nœud d’un type t ′
donné rejoignant le réseau devient responsable de la totalité de l’espace du LIGH-t ′-LAYER correspon-dant. A l’arrivée d’un autre nœud de type t ′ dans le réseau, ce dernier va contacter le nœud responsablede la zone contenant ses coordonnées, en utilisant un routage glouton dans le LIGH-t ′-LAYER. Cettedernière zone sera alors divisée en deux, chacun des deux nœuds devenant responsable de la partiecorrespondante à ses coordonnées, à l’instar de CAN. Une nouvelle frontière est dès lors créée entre lesdeux zones. Celle-ci sera estampillée par un identifiant incrémental, dans l’objectif de conserver l’ordon-nancement de la création de frontière. Ce dernier permet de réorganiser la structure en cas de départ oude défaillance d’un nœud, comme indiqué ci-dessous. En résumé, à chaque arrivée d’un nœud, le nœudresponsable de la zone correspondante la divise en deux et créé une nouvelle frontière estampillée entrele nouveau nœud et lui-même.Chaque nœud appartenant à une sur-couche spécifique doit maintenir une liste de voisin appelée vuedans le LIGH-t-LAYER correspondant. Chaque entrée de cette vue contient (1) l’identifiant du voisinlogique ; (2) ses coordonées dans SOLIST ; (3) les coordonnées des extrémités de la frontière commune ;et (4) l’estampille de cette frontière.La figure 3 présente les différents cas d’évolution de la structure d’un LIGH-t-LAYER à partir de sacréation. Le nœud A de type t rejoint le réseau en premier, et devient donc responsable de la totalitéde l’espace du LIGH-t-LAYER. Dans la figure 3.a, B contacte A, qui divise sa zone en deux et envoi à B,les coordonnées de la zone de ce dernier ainsi que celles de leur frontière commune. Puis, à l’arrivée dunœud C, B divise à son tour sa propre zone, et estampille la nouvelle frontière par un entier strictementplus grand, comme l’illustre la figure 3.b. Après plusieurs arrivées, la figure 3.c présente l’état de lastructure du LIGH-t-LAYER avec 9 nœuds (identifiés de A à I). La plus grande estampille de frontièreest 5.La partie inférieure de la figure 3 présente comment conserver la cohérence de la structure en cas dedépart (figure 3.d) ou de défaillance (figure 3.e). Un départ ou une défaillance est traité de la même façonpar le système. Quand un nœud quitte le LIGH-t-LAYER (sur un départ définitif ou un changement detype), celui-ci envoi sa vue au nœud situé de l’autre coté de la frontière la plus récente. Ce dernierdevient alors responsable de l’union des deux zones, met à jour sa propre vue (avec des nouveauxvoisins potentiels ou des allongements de frontières) et finalement, informe les voisins concernés duchangement d’état de la structure.Par exemple, dans la figure 3.d, le nœud C doit quitter le LIGH-t-LAYER. C envoi donc sa vue à I, qui sesitue derrière la frontière d’estampille 3 (3 étant la plus grande estampille). I devient donc responsabledes deux zones (celles de I et de C). I met à jour sa vue en étendant sa frontière commune avec B, et,
4Les fonctionnalités de hachage et de répartition uniforme des nœuds par le calcul de nouvelles coordonnées logiques dans CAN
sont coûteuses et ne sont pas nécessaire dans SOLIST.5t correspond à l’identifiant du type des nœuds regroupés dans cette sur-couche.
5

(a) Première division à l'arrivée de B (b) Deuxième division à l'arrivée de C(c) Structure après l'arrivée
de 6 nouveaux noeuds
(d) Départ du noeud C (e) Défaillance du noeud F (f) Structure finale
2
A Noeud A
Frontière estampillée par 2
Voisin classique
Voisin surveillant
A
B
A
B
C
A
E I
G
F
HDB
C
A
E I
G
F
HD
B
C
A
E
I
G
F
HD
B
A
E
I
G
HD
B
1
2
1
2
1
2
3 3
5
4
2
31
2
3 3
5
4
2
1
2
3 3
5
2
1
2
3 3
5
FIG. 3 – Evolution de la structure du LIGH-t-LAYER suivant différents évenements.
enfin, prévient ce dernier de cette modification.La détection de défaillance est effectuée par un mécanisme de surveillance commune, selon les hy-pothèses du modèle, décrites dans la partie 2. Le temps maximal de propagation d’un message étantconnu, il ne peut pas y avoir de fausse suspicion. A chaque étape d’arrivée dans le LIGH-t-LAYER, lesdeux nœuds impliqués dans la division d’une zone initient une surveillance symétrique. Périodique-ment, chaque nœud du LIGH-t-LAYER envoi un message jeSuisVivant! à son (ou ses) surveillant(s). Sicelui-ci n’en recoit pas pendant un laps de temps déterminé, il vérifie l’état de son voisin par un messagetoujoursEnVie?. S’il n’obtient toujours aucune réponse, le surveillant considère le nœud comme fautifet le supprime du LIGH-t-LAYER.En cas de défaillance du nœud F comme dans la figure 3.e par exemple, celui-ci doit être retiré deSOLIST. F ne peut évidemment pas envoyer sa vue à un de ses voisins, comme le nécessite la procé-dure de départ volontaire. Dans ce cas, D, qui est un des nœuds surveillants de F, envoie un messagereconstitutionDeVue qui va tourner autour de la zone de F, afin de reconstruire la vue de ce dernierà partir des informations disponibles sur chacun de ses voisins. Avec cette vue ainsi reconstituée, D
exécute la procédure standard de départ, contactant chaque nœud au-delà de la frontière la plus récente(dans ce cas, H et lui-même), et ceux-ci allongent leur zone avec la partie correspondante de l’anciennezone de F. La figure 3.f présente l’état de la structure du LIGH-t-LAYER après l’exécution de ces départs.
4.3. Relier les deux mondes : Les points d’entrée
Chaque LIGH-t-LAYER étant autonome et indépendant en terme de fonctionnement de chacun desautres LIGH-t-LAYER ainsi que de la couche de routage, il reste le problème de lier toutes ces couchesles unes aux autres. Comment atteindre, à partir de n’importe quel nœud du RCsF, un LIGH-t-LAYER
spécifique sans autre information que l’identifiant t du type voulu ?Nous avons calqué l’espace de coordonnée virtuelle sur la couche de routage (cf. partie 2), et utilisonscelui-ci comme proposé dans des travaux récent [10]. Nous utilisons deux fonctions de hachage com-munes à tous les nœuds du système. Le but de ces fonctions est de répartir des points d’entrées virtuelsdans l’espace de coordonnées, uniformément en fonction du nombre de type existant. Soit t un identi-fiant de type donné, pour lequel un nœud recherche le LIGH-t-LAYER correspondant ; fx : N 7→ [0; 1[ et
6

fy : N 7→ [0; 1[ les deux fonctions de hachage ; et wsX, wsY la taille respectivement horizontale et ver-ticale de l’espace de coordonnées. Les coordonnées du point d’entrée correspondant au LIGH-t-LAYER
(nommés ept) sont calculés de la manière suivante :
ept = (x, y) TQ
{x = fx(t) × wsX
y = fy(t) × wsY(1)
Comme fx et fy sont communes à tous les nœuds du réseaux, les coordonnées des points d’entréessont uniques pour tout type. Un point d’entrée est donc représenté par ses coordonnées, identique pourtous les nœuds. Malheureusement, il est probable qu’aucun nœud physique ne se trouve exactementau point correspondant à ces coordonnées. Le protocole de routage géographique permettant de dé-terminer le nœud physique le plus proche d’un point donné dans l’espace virtuel (cf. partie 2), nousappellerons dès lors indistinctement point d’entrée le point de coordonnées ept obtenues par l’équation 1et le nœud le plus proche de celui-ci. Ce dernier doit connaître au moins un nœud de type t (et donc,connaître l’existence du LIGH-t-LAYER). Si ce LIGH-t-LAYER existe, ce nœud doit être en mesure de don-ner l’identifiant et les coordonnées d’un nœud de ce LIGH-t-LAYER. Par la suite, les nœuds référencéssur les points d’entrée seront appelés nœud de contact.La disposition de ces points d’entrées dans l’espace peut amener un nœud excentré à envoyer une re-quête vers un point d’entrée situé à l’exacte opposée du réseau. Afin d’éviter qu’un message n’ait à tra-verser entièrement le réseau et de diminuer la charge des nœuds les plus proches d’un point d’entrée,l’espace des coordonnées est divisé selon une grille : m divisions horizontales (par rapport à la coor-donnée x) et n divisions verticales (par rapport à la coordonnée y). L’espace des coordonnées est alorscalqué sur chacune de ces sous-divisions, appelés cellules par la suite, mais uniquement dans le cadre ducalcul des coordonnées des points d’entrées. Lorsqu’un nœud doit atteindre un LIGH-t-LAYER, il envoisa requete au point d’entrée le plus proche de lui, lequel lui renverra les informations d’un nœud decontact dans le LIGH-t-LAYER.La figure 2 présente une topologie m × n = 3 × 2 contenant 5 types déclarés. Pour chaque cellule, les5 points d’entrées (et1, . . . , et5) sont répliqués à la même position relative. Dans ce cas, le nœud i émetune requête afin d’accéder au LIGH-1-LAYER (sur-couche du groupe de type 1). i connaît, grâce auxfonctions de hachages communes, les coordonnées des 6 points d’entrées (flèches pleine et pointillées),mais ne transmet sa requête qu’au plus proche d’entre eux (ici, ep1(2) représenté par une flèche pleine).Plus formellement, soit d(·, ·) : (R × R)2
7→ R la distance entre deux points de l’espace de coordon-nées sur la couche de routage, et csX, csY la taille des cellules respectivement horizontales et verticales.L’équation 2 présente le calcul pour trouver le point d’entrée de type t le plus proche. Soit les deuxensembles suivants :
{Γx,t = {(kx + fx(t)) × csX|kx ∈ [0..m − 1]}
Γy,t = {(ky + fy(t)) × csY|ky ∈ [0..n − 1]}
Les coordonnées du point d’entrée le plus proche sont les suivantes :
ept = (x, y) (2)
TQ d(i, (x, y)) = minx ′
∈ Γx,t
y ′∈ Γy,t
d(i, (x ′, y ′))
Afin de mettre à jour dynamiquement les informations disponibles sur les points d’entrées, à chaquearrivée d’un nœud dans un LIGH-t-LAYER, celui-ci en informe le point d’entrée de type t le plus prochede sa position. Ainsi, ce point d’entrée connaît le nœud de contact le plus proche de lui, sans avoir ainterroger le LIGH-t-LAYER. Cela permet à l’initiateur d’une requête d’obtenir un nœud de contact quine soit pas trop éloigné. De même, en cas de départ ou de défaillance, les points d’entrées sont informésde ce départ afin de mettre à jour leurs informations sur les nœuds de contact. Néanmoins, comme lechoix du nœuds de contact se fait localement sur chaque point d’entrée, un nœud n’est pas informé s’il aété choisi comme nœud de contact. Tout départ d’un type t donné doit donc être notifié à tous les pointsd’entrée de ce type.
7
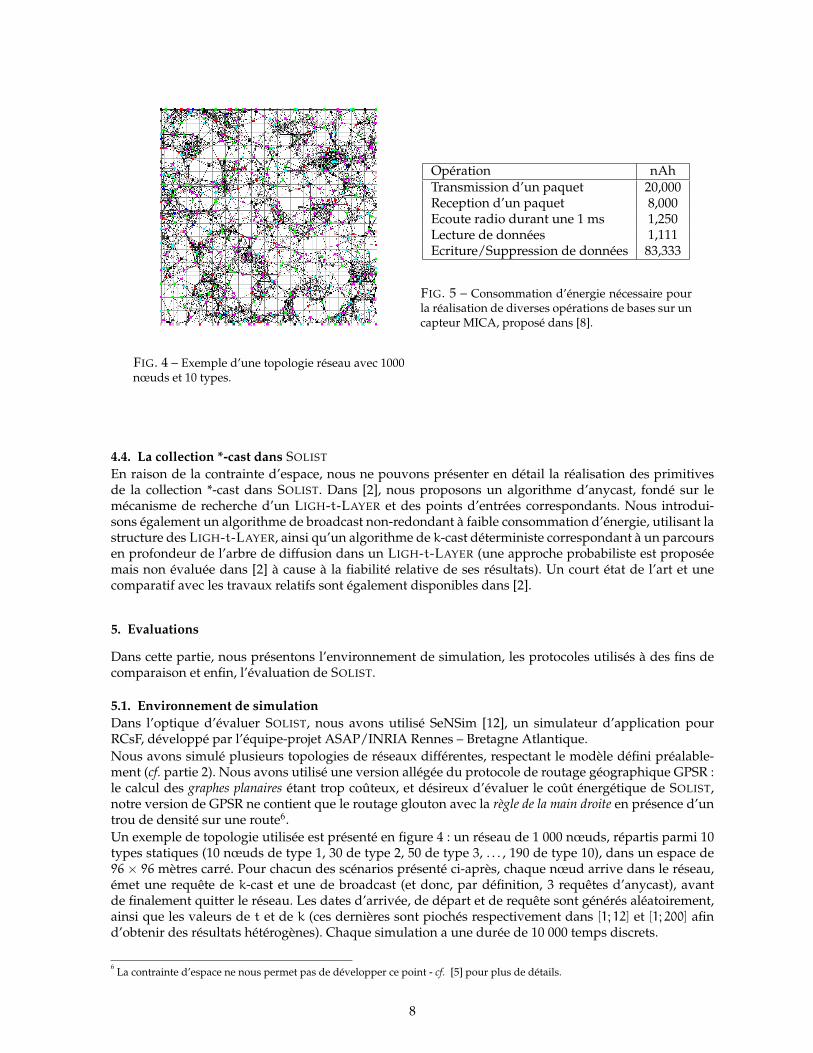
FIG. 4 – Exemple d’une topologie réseau avec 1000nœuds et 10 types.
Opération nAhTransmission d’un paquet 20,000Reception d’un paquet 8,000Ecoute radio durant une 1 ms 1,250Lecture de données 1,111Ecriture/Suppression de données 83,333
FIG. 5 – Consommation d’énergie nécessaire pourla réalisation de diverses opérations de bases sur uncapteur MICA, proposé dans [8].
4.4. La collection *-cast dans SOLIST
En raison de la contrainte d’espace, nous ne pouvons présenter en détail la réalisation des primitivesde la collection *-cast dans SOLIST. Dans [2], nous proposons un algorithme d’anycast, fondé sur lemécanisme de recherche d’un LIGH-t-LAYER et des points d’entrées correspondants. Nous introdui-sons également un algorithme de broadcast non-redondant à faible consommation d’énergie, utilisant lastructure des LIGH-t-LAYER, ainsi qu’un algorithme de k-cast déterministe correspondant à un parcoursen profondeur de l’arbre de diffusion dans un LIGH-t-LAYER (une approche probabiliste est proposéemais non évaluée dans [2] à cause à la fiabilité relative de ses résultats). Un court état de l’art et unecomparatif avec les travaux relatifs sont également disponibles dans [2].
5. Evaluations
Dans cette partie, nous présentons l’environnement de simulation, les protocoles utilisés à des fins decomparaison et enfin, l’évaluation de SOLIST.
5.1. Environnement de simulation
Dans l’optique d’évaluer SOLIST, nous avons utilisé SeNSim [12], un simulateur d’application pourRCsF, développé par l’équipe-projet ASAP/INRIA Rennes – Bretagne Atlantique.Nous avons simulé plusieurs topologies de réseaux différentes, respectant le modèle défini préalable-ment (cf. partie 2). Nous avons utilisé une version allégée du protocole de routage géographique GPSR :le calcul des graphes planaires étant trop coûteux, et désireux d’évaluer le coût énergétique de SOLIST,notre version de GPSR ne contient que le routage glouton avec la règle de la main droite en présence d’untrou de densité sur une route6.Un exemple de topologie utilisée est présenté en figure 4 : un réseau de 1 000 nœuds, répartis parmi 10types statiques (10 nœuds de type 1, 30 de type 2, 50 de type 3, . . . , 190 de type 10), dans un espace de96 × 96 mètres carré. Pour chacun des scénarios présenté ci-après, chaque nœud arrive dans le réseau,émet une requête de k-cast et une de broadcast (et donc, par définition, 3 requêtes d’anycast), avantde finalement quitter le réseau. Les dates d’arrivée, de départ et de requête sont générés aléatoirement,ainsi que les valeurs de t et de k (ces dernières sont piochés respectivement dans [1; 12] et [1; 200] afind’obtenir des résultats hétérogènes). Chaque simulation a une durée de 10 000 temps discrets.
6La contrainte d’espace ne nous permet pas de développer ce point - cf. [5] pour plus de détails.
8

-10
0
10
20
30
40
50
60
70
80
90
100
0 20 40 60 80 100
Dis
tanc
e (m
etre
s)
Nombre de cellules
Distance avec une requete d’anycast sous SolistDistance avec une requete d’anycast en marches aleatoires
Distance du point le plus proche
FIG. 6 – Distance moyenne entre l’émetteur d’un anycastet le nœud de contact correspondant.
0
10
20
30
40
50
60
70
80
90
100
0 10 20 30 40 50 60 70 80 90 100
Dis
tanc
e (m
etre
s ou
sau
ts)
Nombre of cellules
Distance euclidienneDistance en nombre de sauts
FIG. 7 – Distance moyenne entre l’émetteur d’une re-quête d’anycast et le point d’entrée le plus proche.
5.2. Présentation des algorithmes de comparaison
Afin d’évaluer objectivement SOLIST, il est nécessaire de comparer ses résultats avec l’existant. Étantdonnée que l’interfacage générique et la structuration de RCsF n’ont pas été proposé de cette facon(cf. [2]), nous avons utilisés deux protocoles classiques afin de comparer deux des trois membres de lacollection *-cast : la marche aléatoire pour la primitive anycast, et l’inondation pour celle de broadcast.Divers autres algorithmes de broadcast ont été proposés tels que LPBcast [4] mais ceux-ci sont probabi-listes, contrairement à celui proposé dans cet article.Nous avons évalué SOLIST selon deux grands axes présentés dans les paragraphes suivants : la fiabilitédes primitives de la collection *-cast et la consommation d’énergie.
5.3. Fiabilité des primitives
Nous avons évalué la primitive d’anycast selon deux métriques. Tout d’abord, la figure 6 présente ladistance moyenne et l’écart type de celle-ci entre l’émetteur de la requête et le nœud de contact cor-respondant, en fonction du nombre de cellules dans SOLIST. La borne inférieure (Distance du point leplus proche) correspond à la distance moyenne entre l’émetteur de la requête et le nœud le plus prochedu type requis. La distance moyenne par l’utilisation de marches aléatoires est également présentée ici.Pour de grande cellules dans SOLIST, correspondant à un nombre restreint de cellules, les nœuds decontact sont situés assez loin de l’émetteur, ceux-ci étant les plus proches des points d’entrée et non del’émetteur. Mais, plus la taille des cellules diminuent, plus les nœuds de contact sont proches. Un effetde bord peut être observé pour un très grand nombre de cellule, la courbe d’anycast dans SOLIST remon-tant légèrement. En effet, lorsqu’un nœud rejoint un LIGH-t-LAYER, celui-ci informe le point d’entrée leplus proche de son arrivée. À partir d’une forte diminution de la taille des cellules, d’autres points d’en-trée peuvent être plus proche de ce nouveau nœud que de tous les autres de ce LIGH-t-LAYER, mais ilsne seront pas informés de cette arrivée. Nous avons préféré ne pas inonder les points d’entrée à chaquearrivée afin de limiter la consommation d’énergie globale du système.D’autre part, la figure 7 présente la distance moyenne et l’écart type de celle-ci entre tout nœud dusystème et le point d’entrée le plus proche, en fonction du nombre de cellules dans SOLIST. La distanceeuclidienne n’est pas seulement représentée comme en figure 6, mais accompagnée du nombre de sautnécessaire pour contacter un point d’entrée. Cette figure montre que pour les topologies données, àpartir de 6 cellules dans SOLIST, le nombre moyen de sauts est inférieur à 3 sauts, illustrant la basseconsommation d’énergie nécessaire à l’obtention d’un nœud de contact.Concernant les primitives de broadcast et k-cast, la fiabilité des résultat est simple à analyser, corres-pondant à un comportement binaire : Si une requête entraîne l’obtention d’une réponse, alors respec-tivement tous ou k nœuds ont été contactés. Sinon, aucune réponse ne sera renvoyé. Ce dernier casn’apparaît que rarement et uniquement si le LIGH-t-LAYER est en cours de maintenance (départ ou dé-faillance d’un nœud). Considérant le système en régime stable, le taux de succès d’une requête de k-cast
9
20 %
40 %
60 %
80 %
100 %
0 20 40 60 80 100
Ene
rgie
(%
)
Nombre de cellules
SolistMarches Aleatoires et Inondation
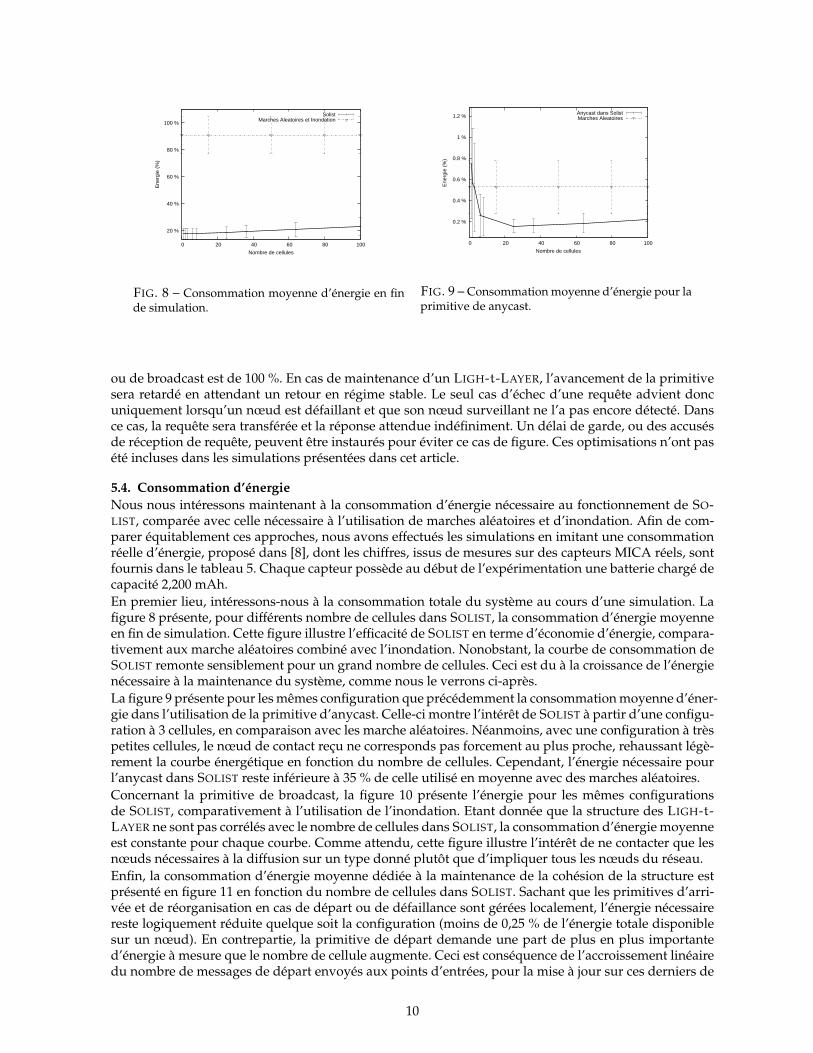
FIG. 8 – Consommation moyenne d’énergie en finde simulation.
0.2 %
0.4 %
0.6 %
0.8 %
1 %
1.2 %
0 20 40 60 80 100
Ene
rgie
(%
)
Nombre de cellules
Anycast dans SolistMarches Aleatoires
FIG. 9 – Consommation moyenne d’énergie pour laprimitive de anycast.
ou de broadcast est de 100 %. En cas de maintenance d’un LIGH-t-LAYER, l’avancement de la primitivesera retardé en attendant un retour en régime stable. Le seul cas d’échec d’une requête advient doncuniquement lorsqu’un nœud est défaillant et que son nœud surveillant ne l’a pas encore détecté. Dansce cas, la requête sera transférée et la réponse attendue indéfiniment. Un délai de garde, ou des accusésde réception de requête, peuvent être instaurés pour éviter ce cas de figure. Ces optimisations n’ont pasété incluses dans les simulations présentées dans cet article.
5.4. Consommation d’énergie
Nous nous intéressons maintenant à la consommation d’énergie nécessaire au fonctionnement de SO-LIST, comparée avec celle nécessaire à l’utilisation de marches aléatoires et d’inondation. Afin de com-parer équitablement ces approches, nous avons effectués les simulations en imitant une consommationréelle d’énergie, proposé dans [8], dont les chiffres, issus de mesures sur des capteurs MICA réels, sontfournis dans le tableau 5. Chaque capteur possède au début de l’expérimentation une batterie chargé decapacité 2,200 mAh.En premier lieu, intéressons-nous à la consommation totale du système au cours d’une simulation. Lafigure 8 présente, pour différents nombre de cellules dans SOLIST, la consommation d’énergie moyenneen fin de simulation. Cette figure illustre l’efficacité de SOLIST en terme d’économie d’énergie, compara-tivement aux marche aléatoires combiné avec l’inondation. Nonobstant, la courbe de consommation deSOLIST remonte sensiblement pour un grand nombre de cellules. Ceci est du à la croissance de l’énergienécessaire à la maintenance du système, comme nous le verrons ci-après.La figure 9 présente pour les mêmes configuration que précédemment la consommation moyenne d’éner-gie dans l’utilisation de la primitive d’anycast. Celle-ci montre l’intérêt de SOLIST à partir d’une configu-ration à 3 cellules, en comparaison avec les marche aléatoires. Néanmoins, avec une configuration à trèspetites cellules, le nœud de contact reçu ne corresponds pas forcement au plus proche, rehaussant légè-rement la courbe énergétique en fonction du nombre de cellules. Cependant, l’énergie nécessaire pourl’anycast dans SOLIST reste inférieure à 35 % de celle utilisé en moyenne avec des marches aléatoires.Concernant la primitive de broadcast, la figure 10 présente l’énergie pour les mêmes configurationsde SOLIST, comparativement à l’utilisation de l’inondation. Etant donnée que la structure des LIGH-t-LAYER ne sont pas corrélés avec le nombre de cellules dans SOLIST, la consommation d’énergie moyenneest constante pour chaque courbe. Comme attendu, cette figure illustre l’intérêt de ne contacter que lesnœuds nécessaires à la diffusion sur un type donné plutôt que d’impliquer tous les nœuds du réseau.Enfin, la consommation d’énergie moyenne dédiée à la maintenance de la cohésion de la structure estprésenté en figure 11 en fonction du nombre de cellules dans SOLIST. Sachant que les primitives d’arri-vée et de réorganisation en cas de départ ou de défaillance sont gérées localement, l’énergie nécessairereste logiquement réduite quelque soit la configuration (moins de 0,25 % de l’énergie totale disponiblesur un nœud). En contrepartie, la primitive de départ demande une part de plus en plus importanted’énergie à mesure que le nombre de cellule augmente. Ceci est conséquence de l’accroissement linéairedu nombre de messages de départ envoyés aux points d’entrées, pour la mise à jour sur ces derniers de
10
10 %
20 %
30 %
40 %
50 %
0 20 40 60 80 100
Ene
rgie
(%
)
Nombre de cellules
Broadcast dans SolistInondation
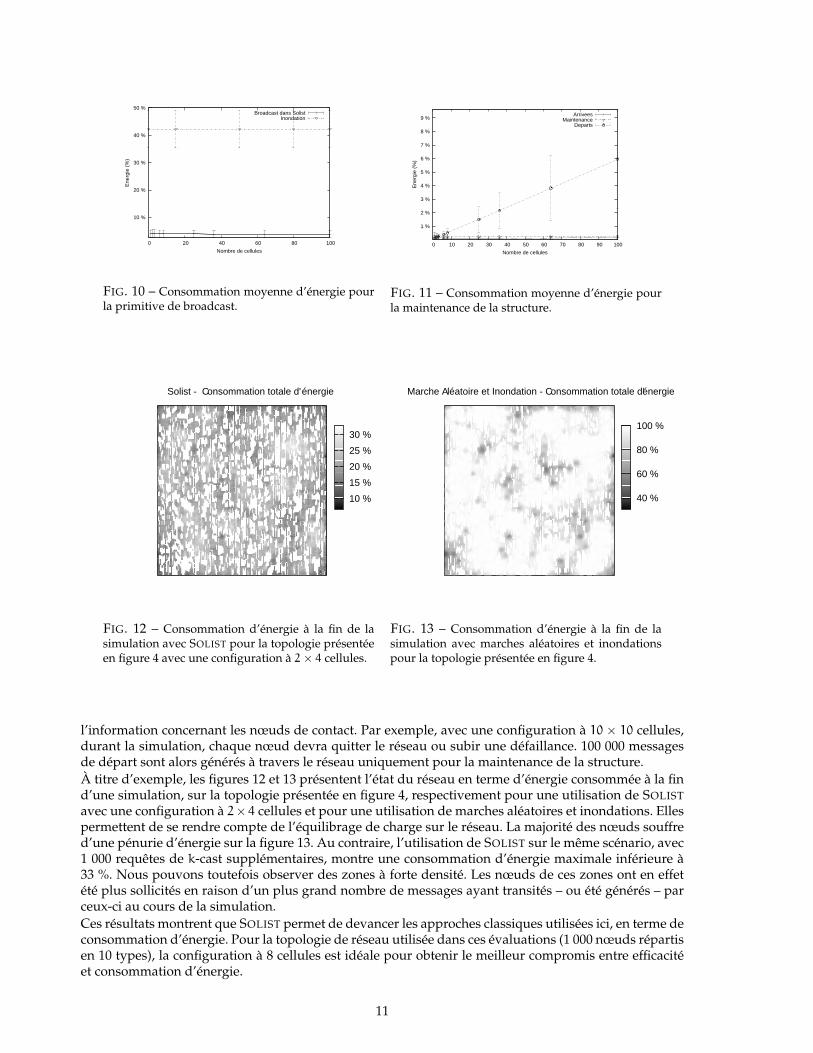
FIG. 10 – Consommation moyenne d’énergie pourla primitive de broadcast.
1 %
2 %
3 %
4 %
5 %
6 %
7 %
8 %
9 %
0 10 20 30 40 50 60 70 80 90 100
Ene
rgie
(%
)
Nombre de cellules
ArriveesMaintenance
Departs
FIG. 11 – Consommation moyenne d’énergie pourla maintenance de la structure.
10 %
15 %
20 %
25 %
30 %
Solist - C onsommation totale d ' é nergie
FIG. 12 – Consommation d’énergie à la fin de lasimulation avec SOLIST pour la topologie présentéeen figure 4 avec une configuration à 2 × 4 cellules.
40 %
60 %
80 %
100 %
M arch e A lé atoire et I nondation - C onsommation totale d'� é nergie
FIG. 13 – Consommation d’énergie à la fin de lasimulation avec marches aléatoires et inondationspour la topologie présentée en figure 4.
l’information concernant les nœuds de contact. Par exemple, avec une configuration à 10 × 10 cellules,durant la simulation, chaque nœud devra quitter le réseau ou subir une défaillance. 100 000 messagesde départ sont alors générés à travers le réseau uniquement pour la maintenance de la structure.À titre d’exemple, les figures 12 et 13 présentent l’état du réseau en terme d’énergie consommée à la find’une simulation, sur la topologie présentée en figure 4, respectivement pour une utilisation de SOLIST
avec une configuration à 2× 4 cellules et pour une utilisation de marches aléatoires et inondations. Ellespermettent de se rendre compte de l’équilibrage de charge sur le réseau. La majorité des nœuds souffred’une pénurie d’énergie sur la figure 13. Au contraire, l’utilisation de SOLIST sur le même scénario, avec1 000 requêtes de k-cast supplémentaires, montre une consommation d’énergie maximale inférieure à33 %. Nous pouvons toutefois observer des zones à forte densité. Les nœuds de ces zones ont en effetété plus sollicités en raison d’un plus grand nombre de messages ayant transités – ou été générés – parceux-ci au cours de la simulation.Ces résultats montrent que SOLIST permet de devancer les approches classiques utilisées ici, en terme deconsommation d’énergie. Pour la topologie de réseau utilisée dans ces évaluations (1 000 nœuds répartisen 10 types), la configuration à 8 cellules est idéale pour obtenir le meilleur compromis entre efficacitéet consommation d’énergie.
11

6. Conclusion
Dans cet article, nous avons proposé SOLIST, une solution générique tout-en-un pour fournir l’implé-mentation de la collection *-cast (i.e. anycast, k-cast et broadcast) dans les RCsF statiques. Celle-ci estune architecture de système, faible consommation, pour les RCsF large-échelle. SOLIST est composéd’un ensemble fini de sur-couches (les LIGH-t-LAYER) permettant de mettre en œuvre cette interfacecommune, fondé sur le groupement de nœud de même type. Une mise en œure efficace de la collection*-cast en terme de fiabilité des résultats et de consommation d’énergie est fournie.SOLIST a été évalué par simulation pour chacune des fonctionnalités fournies. Nous avons comparéSOLIST avec d’autres algorithmes classiques : les marches aléatoire pour l’anycast et l’inondation pararbre de diffusion pour le broadcast. Les résultats de cette étude illustrent la forte économie d’énergiedue à l’utilisation de SOLIST par rapport à des algorithmes standards.
Bibliographie
1. Yann Busnel, Marin Bertier, Eric Fleury, et Anne-Marie Kermarrec. GCP : Gossip-based Code Propagation forlarge-scale mobile wireless sensor networks. In The First ACM International Conference on Autonomic Computingand Communication Systems (Autonomics’07), Roma, Italy, Oct. 2007.
2. Yann Busnel, Marin Bertier, et Anne-Marie Kermarrec. SOLIST : A lightweight multi-overlay structure for wire-less sensor networks. Rapport de recherche, INRIA, Rennes, France, Oct. 2007.
3. Miguel Castro, Michael B. Jones, Anne-Marie Kermarrec, Antony Rowstron, Marvin Theimer, Helen Wang, etAlec Wolman. An evaluation of scalable application-level multicast built using peer-to-peer overlays. In The22nd Annual Joint Conference of the IEEE Computer and Communications Societies (Infocom’03), San Francisco, CA,USA, Fév. 2003.
4. Patrick Eugster, Sidath Handurukande, Rachid Guerraoui, Anne-Marie Kermarrec, et Petr Kouznetsov. Light-weight probabilistic broadcast. ACM Transactions on Computer Systems, 21(4) :341–374, 2003.
5. Brad Karp et H. T. Kung. GPSR : Greedy Perimeter Stateless Routing for Wireless Networks. In ACM/IEEEInternational Confrence on Mobile Computing and Networking (MobiCom 2000), Boston, MA, USA, Août 2000.
6. YoungMin Kwon, Kirill Mechitov, Sameer Sundresh, Wooyoung Kim, et Gul Agha. Resilient localization forsensor networks in outdoor environments. In Proceedings of the 25th IEEE International Conference on DistributedComputing Systems (ICDCS’05), pages 643–652, Colombus, OH, USA, Juin 2005.
7. Samuel R. Madden, Michael J. Franklin, Joseph M. Hellerstein, et Wei Hong. TinyDB : an acquisitional queryprocessing system for sensor networks. ACM Transactions on Database System, 30(1) :122–173, 2005.
8. A. Mainwaring, J. Polastre, R. Szewczyk, D. Culler, et J. Anderson. Wireless Sensor Networks for Habitat Moni-toring. In The First ACM International Workshop on Wireless Sensor Networks and Applications (WSNA 2002), pages88–97, Atlanta, GE, USA, Sep. 2002.
9. R. O’Dell et Roger Wattenhofer. Theoretical aspects of connectivity-based multi-hop positioning. TheoreticalComputer Science, 344 :47–68, Juin 2005.
10. Sylvia Ratnasamy, Deborah Estrin, Ramesh Govindan, Brad Karp, Scott Shenker, Li Yin, et Fang Yu. Data-Centric Storage in Sensornets. In Proceedings of the 2002 ACM Conference on Applications, Technologies, Architec-tures, and Protocols for Computer Communications (SIGCOMM’02), New York, NY, USA, 2002.
11. Sylvia Ratnasamy, Paul Francis, Mark Handley, Richard Karp, et Scott Schenker. A scalable content-addressablenetwork. In Proceedings of the 2001 ACM Conference on Applications, Technologies, Architectures, and Protocols forComputer Communications (SIGCOMM’01), pages 161–172, Août 2001.
12. Simulateur SeNSim. http ://sensim.gforge.inria.fr/, ASAP Research Project, INRIA Rennes, FR,2005-2007.
12