software components developmentrobotics.unibg.it/teaching/srt/pdf/16_distributedcomponents.pdfa...
TRANSCRIPT

Embedded Real Time SystemsProf. Davide Brugali
Università degli Studi di Bergamo
Software Components Development
Slides from the course of Real Time Systems by Giusepe Lipari, SSSA

Development time
Development time

Sofware design
We need to see the system at 3 different levels of abstractions:
User level (requests and services)
Functional level (modules and functionality)
Tasks level (concurrent tasks and resources)

Sofware design : user level

Sofware design : functional level

Module specifications

Sofware design : task level

A software component is an independent, executable entity that packages data, functionalities, and tasks in a reusable and composable module.
Software components design
Szyperski:A software component is a unit of composition with contractually specified interfaces and explicit context dependencies only. A software component can be deployed independently and is subject to composition by third-parties.

Software components
Thread
State
Procedure
Messages
Thread
State
Procedure
Thread
State
Procedure
Messages

A simple control system
10

Mapping control functionality to components
11
Odometry
Trajectory
(x, v)
Twist
Vsx, Vdx
Esx, Edx
ThreadState
Procedure
ThreadState
Procedure
ThreadState
Procedure

Mapping control functionality to components
12
Navigator
Odometry
Trajectory
(x, v)
T1 (1 ms)T2 (20 ms)Twist
TrajectoryPlanning
Vsx, Vdx
Esx, Edx
Rover Driver

Component interfaces
Provides interfaceRequires interface
ComponentDefines the servicesfrom the component’senvironment that ituses
Defines the servicesthat are providedby the componentto other components
Provides interfaceRequires interface
Data collector
addSensorremoveSensorstartSensor
stopSensor
testSensor
listAllreport
initialise
sensorManagement
sensorData
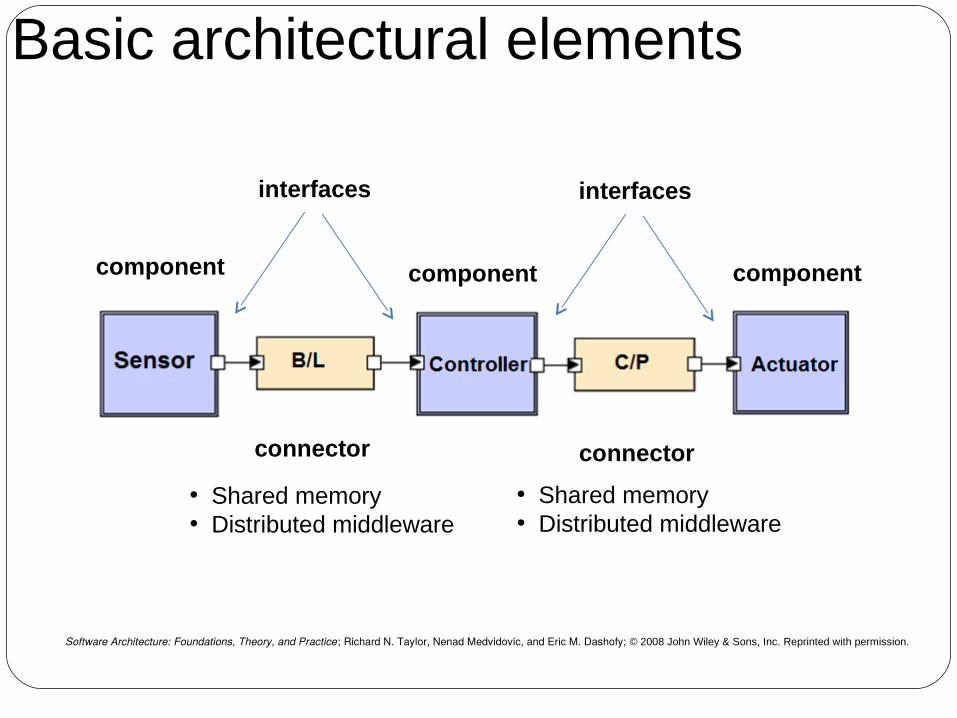
Basic architectural elements
Software Architecture: Foundations, Theory, and Practice; Richard N. Taylor, Nenad Medvidovic, and Eric M. Dashofy; © 2008 John Wiley & Sons, Inc. Reprinted with permission.
component component component
connector connector
interfaces interfaces
• Shared memory• Distributed middleware
• Shared memory• Distributed middleware

Arduino Robot

Robot BART
SONARsensors
Line color sensorRadio module
Motors with
Encoders

Robot BART

Motor shield MD25
MOTOR 1E1
MOTOR 2E2

Speed control
x
y
y
x
OdometryY
OdometryX
Twist
WLWR
V
{V

Software components
RoverDriver
Twist Odometry
Navigator
USB left_encoderright_encoder
left_speedright_speed
Target
Periodic activity T= 100 ms
Periodic activity T= 1000 ms
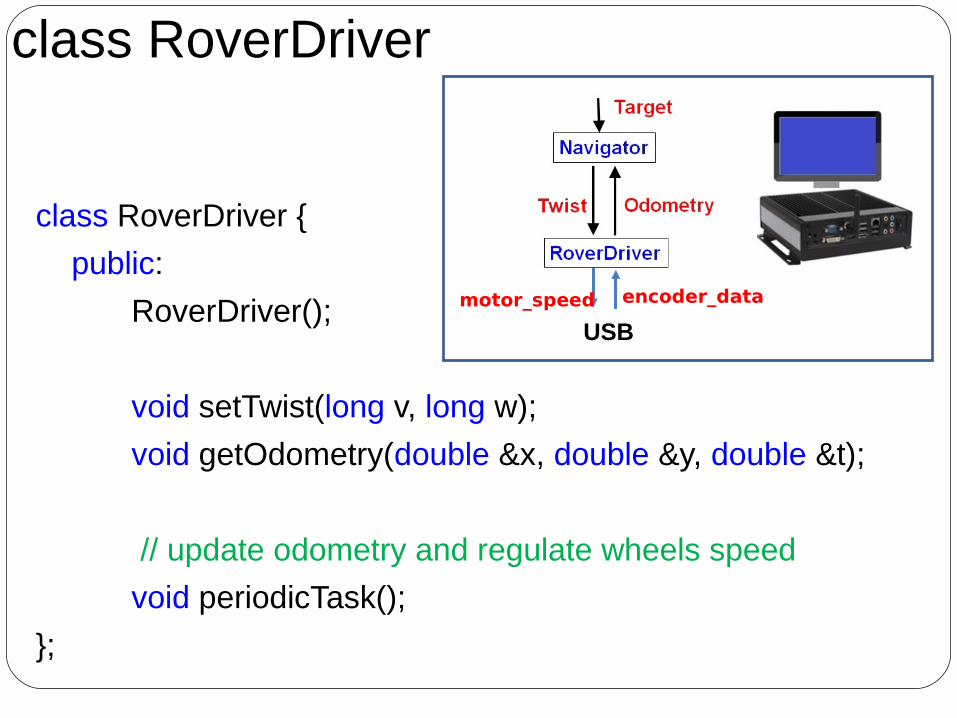
class RoverDriver
class RoverDriver {
public:
RoverDriver();
void setTwist(long v, long w);
void getOdometry(double &x, double &y, double &t);
// update odometry and regulate wheels speed
void periodicTask();
};
encoder_datamotor_speed
USB

class Navigator
class Navigator {
public:
RoverDriver();
void setTarget(double x, double y, double t);
// get odometry and generate twist to regulate robot position
void periodicTask();
private:
void getTwist(long &v, long &w);
void setOdometry(double x, double y, double t);
};
encoder_datamotor_speed
USB

Basic architectural elements
Software Architecture: Foundations, Theory, and Practice; Richard N. Taylor, Nenad Medvidovic, and Eric M. Dashofy; © 2008 John Wiley & Sons, Inc. Reprinted with permission.
component component component
connector connector
interfaces interfaces
• Shared memory• Distributed middleware
• Shared memory• Distributed middleware

Component-based system
<<component>>Navigator
motor command
<<component>>Rover Driver
Twist
Odometry
Trajectory
encoder data
shared memory
shared memory

Component-based system
RoverDriver
Component
Navigator
Component
TwistOdometry
Shared Memoryread
readwrite
write
Main Process
Thread Thread

Main processpthread_mutex_t mutexOnSharedResource; //Mutex declarationRoverDriver rover;Navigator navigator;Twist shared_twist; Shared variables to be protected Odometry shared_odometry;
int main (int argc, char *argv[]){ // Set the Target and init the shared variables navigator.setTarget(100, 230, 180); //[cm] [cm] [gradi] shared_twist.linear = 0; shared_twist.angular = 0;
// Init mutex ...
// Thread variables pthread_t driver_thread; pthread_t navigator_thread;
// Create and start the threads pthread_create(driver_thread, driverTask, NULL); pthread_create(navigator_thread, navigatorTask, NULL)}

Rover Driver Taskvoid *driverTask(void *null) { double v, w; double ox, oy, ot;
while(alive){ rover.getOdometry(ox, oy, ot) // read USB
pthread_mutex_lock (&mutexOnSharedResource);shared_odometry.x = ox; // write shared memoryshared_odometry.y = oy;shared_odometry.t = ot;
v = shared_twist.linear; // read shared memoryw = shared_twist.angular; pthread_mutex_unlock (&mutexOnSharedResource);
rover.setTwist(v, w); // write USBsleep(100);
}
pthread_exit((void *) 0);}
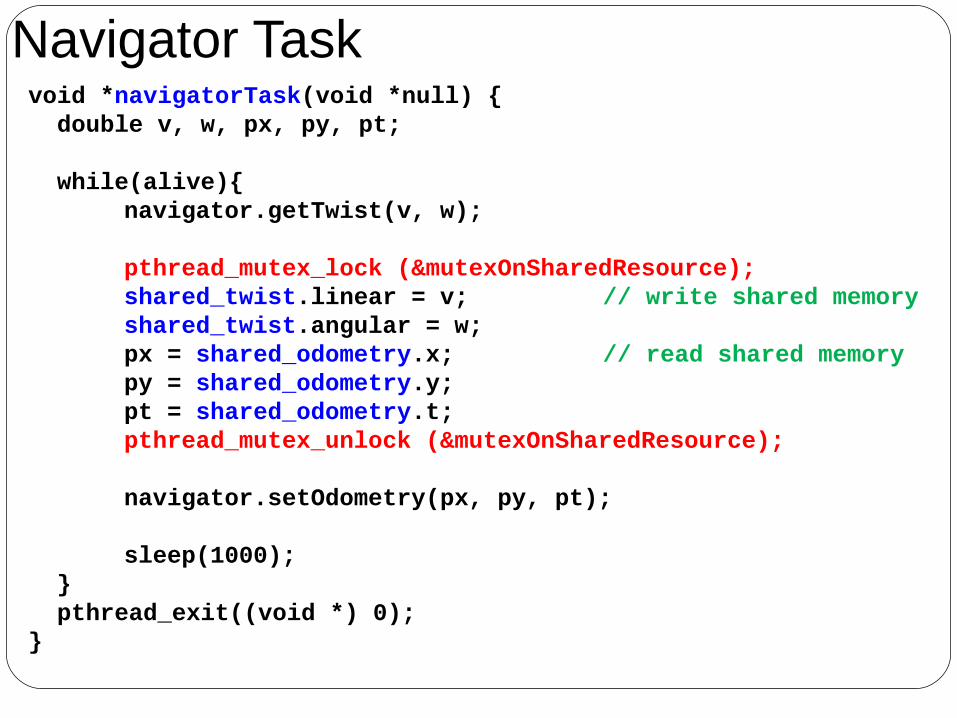
Navigator Taskvoid *navigatorTask(void *null) { double v, w, px, py, pt;
while(alive){ navigator.getTwist(v, w);
pthread_mutex_lock (&mutexOnSharedResource); shared_twist.linear = v; // write shared memory
shared_twist.angular = w;px = shared_odometry.x; // read shared memorypy = shared_odometry.y;pt = shared_odometry.t;pthread_mutex_unlock (&mutexOnSharedResource);
navigator.setOdometry(px, py, pt);
sleep(1000); } pthread_exit((void *) 0);}

Distributed Component-based System
RoverDriver
Task
TwistOdometry
Network
Main Process Main Process
Middleware
Middleware
Navigator
Task
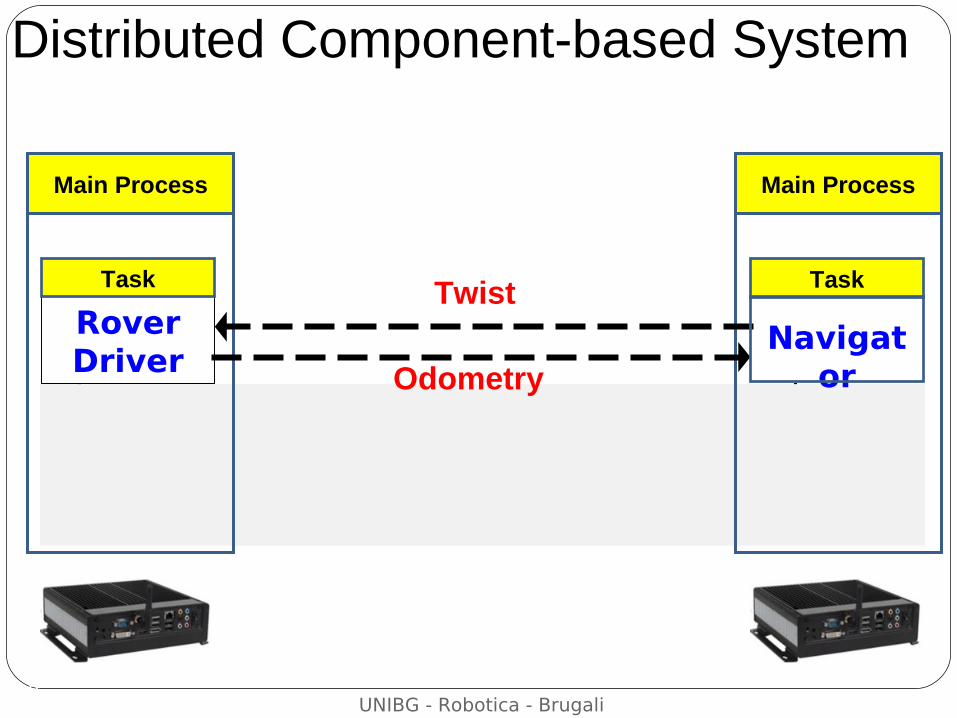
Distributed Component-based System
UNIBG - Robotica - Brugali30
RoverDriver
TwistOdometry
Network
Main Process Main Process
Middleware
Middleware
Twist
OdometryNavigat
or
TaskTask

Basic architectural elements
Software Architecture: Foundations, Theory, and Practice; Richard N. Taylor, Nenad Medvidovic, and Eric M. Dashofy; © 2008 John Wiley & Sons, Inc. Reprinted with permission.
component component component
connector connector
interfaces interfaces
• Shared memory• Distributed middleware
• Shared memory• Distributed middleware

Distributed middlewares

33
Distributed ApplicationsDistributed Applications
Operating System CommsOperating System Comms
NetworkNetwork
Distributed Middlewares• What is Middleware?
• Layer between OS and distributed applications• Hides complexity and heterogeneity of distributed system • Bridges gap between low-level OS communications and
programming language abstractions• Provides common programming abstraction and
infrastructure for distributed applications
Distributed Applications
Middleware
Operating System Comms
(packets, bits…)
(remote calls, object invocation, messages, …)
(sockets, IP, TCP, UDP, …)
Network
Types of middlewares
• Remote Procedure Call (RPC)• Historic interest
• Object-Oriented Middleware (OOM)• Java RMI• CORBA• Reflective Middleware
• Message-Oriented Middleware (MOM)• Java Message Service• IBM MQSeries• Web Services
• Event-Based Middleware• Cambridge Event Architecture• Hermes
research
research

Remote Procedure Call (RPC)• Masks remote function calls as being local
• Client/server model
• Request/reply paradigm• Marshalling of function parameters and return value
Caller RPC Service RPC Service RemoteFunction
call(…)
1) Marshal args2) Generate ID3) Start timer 4) Unmarshal
5) Record ID
6) Marshal7) Set timer
8) Unmarshal9) Acknowledge
fun(…)
message

Properties of RPC
Language-level pattern of function call• easy to understand for programmer
Synchronous request/reply interaction• natural from a programming language point-of-
view• matches replies to requests• built in synchronisation of requests and replies
Distribution transparency (in the no-failure case)
• hides the complexity of a distributed system

Disadvantages of RPC Synchronous request/reply interaction
• tight coupling between client and server• client may block for a long time if server loaded leads to multi-threaded programming at client• slow/failed clients may delay servers when
replying • multi-threading essential at servers
Distribution Transparency• Not possible to mask all problems
RPC paradigm is not object-oriented• invoke functions on servers as opposed to methods on objects
fork(…)
join(…)
remote call

Message passing paradigm• Another approach is to exchange data through a
message passing paradigm:• Every task operates on a private memory space;• Data are exchanged by messages through a channel.

Distributed Component-based Systems
Client Server
PublisherSubscriber
SS
SS
Global Data Space
Request
Reply
Invoke Service or FunctionCORBA
DDS
Subscriber
S sample

Span of Middleware Technologies for DRE Systems
Soft Real-time (Display and
decision support)
Non-real-time (Business Systems)
Hard Real-time (sensor and
actuator control)
Extreme Real-time (signal processing)
MicroSoft .NET
Java / RMI
CORBA (GPP)
Message Passing Interface (MPI )
Market Share
OMG Data Distribution Service (DDS)
Source: OACE Tech. & Stds. Sept. 2003
RT CORBA (DSP) RT CORBA (FPGA)

Data Distribution Service (DDS)

Platform Independent

DomainParticipantPublisher
DataWriter
Subscriber
DataReader
DDS-DCPS Entities
• DomainParticipant ~ Represents participation of the application in the communication collective
• DataWriter ~ Accessor to write typed data on a particular Topic
• Publisher ~ Aggregation of DataWriter objects. Responsible for disseminating information.
• DataReader ~ Accessor to read typed data regarding a specific Topic
• Subscriber ~ Aggregation of DataReader objects. Responsible for receiving information
Topic

Topic
• Topics can be defined as Singleton or can have multiple Instances• Topic Instances are identified by means of the topic key • A Topic Key is identified by a tuple of attributes -- like in databases• Remarks:
• A Singleton topic has a single domain-wide instance• A “regular” Topic can have as many instances as the number of different key values, e.g., if
the key is an 8-bit character then the topic can have 256 different instances

QoS: Durability
Topic
Publisher
Domain Participant
DataWriter
# saved in Transient affected by QoS: History and QoS: Resource_Limits
Publisher
Domain Participant
DataWriter
LocalMemory
Durability = Transient
Durability = Volatile
Durability Kind:VOLATILE – No Instance History SavedTRANSIENT – History Saved in Local MemoryPERSISTENT – History Saved in Permanent storage
Perm.Storage
Durability = Persistent
Durability determines if/how instances of a topic are saved.
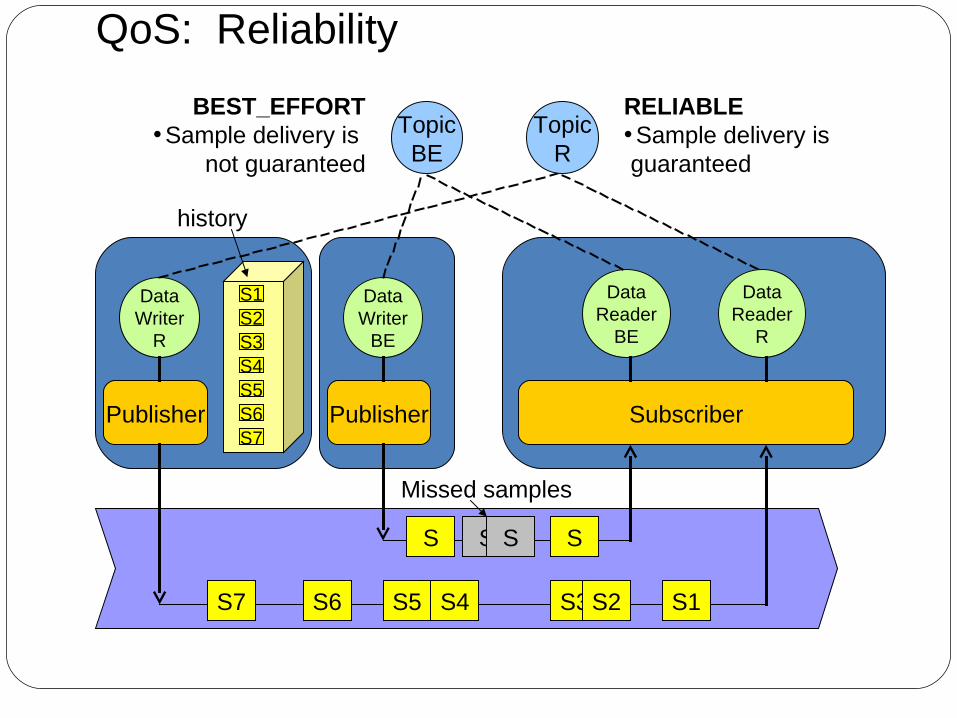
QoS: Reliability
DataWriter
R
BEST_EFFORT• Sample delivery is
not guaranteed
TopicBE
DataReader
BE
SubscriberPublisher
DataWriter
BE
Publisher
TopicR
DataReader
R
SS S S
Missed samples
S7 S5S6 S4 S3S2 S1
RELIABLE• Sample delivery is guaranteed
S7
S5S6
S4S3S2S1
history

QoS Contract “Request / Offered”
QoS Request / Offered: Ensure that the compatible QoS parameters are set.
Topic
DataWriter
Publisher
QoS:DurabilityQoS:PresentationQoS:DeadlineQoS:Latency_BudgetQoS:OwnershipQoS:LivelinessQoS:Reliability
OfferedQoS
Topic
DataReader
Subscriber
RequestedQoS
X
QoS not compatible
Communication not established

DDS example

Simple control system based on DDS
subscriberpublisher
Data Distribution Service
Operating System
odometry

Publisher Componentint main (int argc, char* argv[]) {
dds::domain::DomainParticipant dp =
dds::domain::DomainParticipant(org::opensplice::domain::default_id());
dds::topic::qos::TopicQos topicQos = dp.default_topic_qos()
<< dds::core::policy::Durability::Transient() << dds::core::policy::Reliability::Reliable();
dds::topic::Topic<star::nav_msgs::Odometry> topic(dp, "RoverOdometry", topicQos);
dds::pub::qos::PublisherQos pubQos = dp.default_publisher_qos()
<< dds::core::policy::Partition("Tutorial");
dds::pub::Publisher pub(dp, pubQos);
dds::pub::qos::DataWriterQos dwqos = topic.qos()
<< dds::core::policy::WriterDataLifecycle::ManuallyDisposeUnregisteredInstances();
dds::pub::DataWriter<star::nav_msgs::Odometry> dw(pub, topic, dwqos);
while(1) {
star::nav_msgs::Odometry odometry; odometry = ….
dw << odometry;
sleep(1000);
}
}
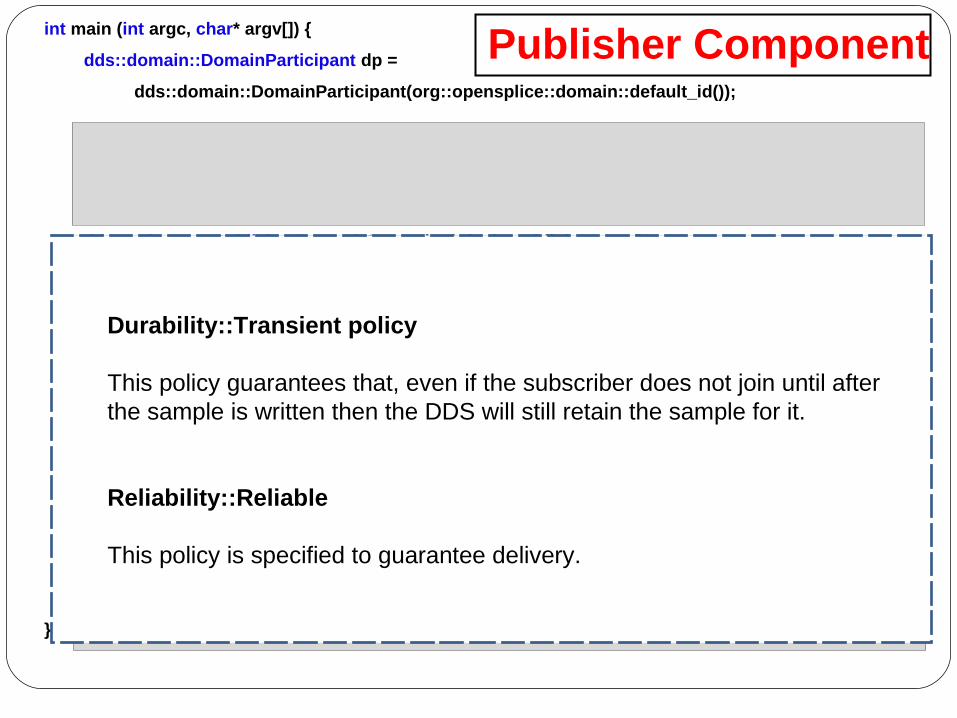
Publisher Componentint main (int argc, char* argv[]) {
dds::domain::DomainParticipant dp =
dds::domain::DomainParticipant(org::opensplice::domain::default_id());
dds::topic::qos::TopicQos topicQos = dp.default_topic_qos()
<< dds::core::policy::Durability::Transient() << dds::core::policy::Reliability::Reliable();
dds::topic::Topic<star::nav_msgs::Odometry> topic(dp, "RoverOdometry", topicQos);
dds::pub::qos::PublisherQos pubQos = dp.default_publisher_qos()
<< dds::core::policy::Partition("Tutorial");
dds::pub::Publisher pub(dp, pubQos);
dds::pub::qos::DataWriterQos dwqos = topic.qos()
<< dds::core::policy::WriterDataLifecycle::ManuallyDisposeUnregisteredInstances();
dds::pub::DataWriter<star::nav_msgs::Odometry> dw(pub, topic, dwqos);
while(1) {
star::nav_msgs::Odometry odometry; odometry = ….
dw << odometry;
sleep(1000);
}
}
Durability::Transient policy
This policy guarantees that, even if the subscriber does not join until after the sample is written then the DDS will still retain the sample for it.
Reliability::Reliable
This policy is specified to guarantee delivery.

Publisher Componentint main (int argc, char* argv[]) {
dds::domain::DomainParticipant dp =
dds::domain::DomainParticipant(org::opensplice::domain::default_id());
dds::topic::qos::TopicQos topicQos = dp.default_topic_qos()
<< dds::core::policy::Durability::Transient() << dds::core::policy::Reliability::Reliable();
dds::topic::Topic<star::nav_msgs::Odometry> topic(dp, "RoverOdometry", topicQos);
dds::pub::qos::PublisherQos pubQos = dp.default_publisher_qos()
<< dds::core::policy::Partition("Tutorial");
dds::pub::Publisher pub(dp, pubQos);
dds::pub::qos::DataWriterQos dwqos = topic.qos()
<< dds::core::policy::WriterDataLifecycle::ManuallyDisposeUnregisteredInstances();
dds::pub::DataWriter<star::nav_msgs::Odometry> dw(pub, topic, dwqos);
while(1) {
star::nav_msgs::Odometry odometry; odometry = ….
dw << odometry;
sleep(1000);
}
}
WriterDataLifecycle::ManuallyDisposeUnregisteredInstances
This policy guarantees that the publisher can optionally be run (andexit) before the subscriber. It prevents the middleware default 'clean up' ofthe topic instance after the writer deletion. This deletion implicitly performsDataWriter::unregister_instance

Subscriber Componentint main (int argc, char* argv[]) {
dds::domain::DomainParticipant dp =
dds::domain::DomainParticipant(org::opensplice::domain::default_id());
dds::topic::qos::TopicQos topicQos = dp.default_topic_qos()
<< dds::core::policy::Durability::Transient() <<dds::core::policy::Reliability::Reliable();
dds::topic::Topic<star::nav_msgs::Odometry> topic(dp, "RoverOdometry", topicQos);
dds::sub::qos::SubscriberQos subQos = dp.default_subscriber_qos()
<< dds::core::policy::Partition("Tutorial");
dds::sub::Subscriber sub(dp, subQos);
dds::sub::qos::DataReaderQos drqos = topic.qos();
dds::sub::DataReader<star::nav_msgs::Odometry> dr(pub, topic, drqos);
star::nav_msgs::Odometry odometry;
while(1) {
dds::sub::LoanedSamples<star::nav_msgs::Odometry> samples = dr.take()
for (dds::sub::LoanedSamples<star::nav_msgs::Odometry>::const_iterator
odometry = samples.begin(); odometry < samples.end(); ++odometry)
}
}

More QoS parameters
54

DCPS Subscription Objects (MultiTopic)
DataReader
Domain Participant
Topic Topic Topic Topic
Subscriber
Domain Participant
SubscriberSubscriber
DataReader
DataReader Data
ReaderListener
(optional)
MultiTopics can combine, filter and rearrange data from multiple topics
** Listeners Wait-Set or conditions available
MultiTopic
Optional

QoS: History: Last x or All
DataWriter
Keep All
KEEP_LAST: “depth” integer for the number of samples to keep at any one time
DataReaderKeep all
Publisher Subscriber
Topic
S5S7 S2S4 S1
KEEP_ALL:Publisher: keep all until deliveredSubscriber: keep each sample until the application processes that instance
S7
S5S6
S4S3S2S1
S7
S5S6
S4S3 Data
ReaderKeepLast4
Subscriber
S7
S5S6
S4
S3S6
DataWriter
KeepLast 2
Publisher
S7S6
Topic
S7 S6 S5 S4 S3

QoS: Deadline
Topic
Publisher
DataWriter
Subscriber
DataReader
DEADLINE “deadline period”
deadline
Commits to provide data each deadline period. Expects data every
deadline period.
S X S S S S S
Listener
Failed to get data

QoS: Liveliness – Type, Duration
Domain Participant
DataWriter
Topic
Publisher
LP S LP LP
lease_duration
X
DataReader
Subscriber
Listener
Liveliness Message
Domain Participant
Type:AUTOMATIC = Infrastructure ManagedMANUAL = Application Managed
Failed to
renew lease

QoS: Time_Based_Filter
Domain Participant
DataWriter
Topic
Publisher
SS S S S
minimum separation
DataReader
Subscriber
Data Samples
“minimum_separation”: Data Reader does not want to receive data faster than the min_separation time
SS
Discardedsamples

QoS: Ownership
DataWriter
Ownership = EXCLUSIVE• Only highest-strength data writer can update data-instance
DataWriter
DataWriter
Ownership = SHARED• All data-writers can update data-instance
Ownership: Specifies whether more than one Data Writer can update the same instance of a data-object
Data-Instance
DataWriter
DataWriter
DataWriter
Data-Instance

QoS: Ownership_Strength
DataWriter
OWNERSHIP_STRENGTH• Integer to specify the strength of an instance
Topic
DataReader
Subscriber
Domain Participant
Publisher
DataWriter
Publisher
S=1 S=4 S=4
Note: Only applies to Topics with Ownership=Exclusive
Ownership Strength: Specifies which writer is allowed to update the values of data-objects

QoS: Destination_Order
DataWriter
BY_RECEPTION_TIMESTAMP• Order is determined by the DR timestamp
DataReader
PublisherSubscriberSource TS
Topic
T2S4 S2S3 S1
BY_SOURCE_TIMESTAMP• Consistent order for delivery is guaranteed
S7
S5S6
S4S3S2S1
history
S4
S3T3
T2S2T1S1 Data
Reader
SubscriberRec TS S4
T2T3
S3T1S2S1
T1T3
Order of updates as received by subscribers
DataWriter
PublisherT7
T5T6
T4T3T2T1
history
S3S4 T1T2 S1S2T3Absolute order of writes

QoS: Latency_Budget
Physical I/F
Transport
DDS
Application
Publication
t1
t2
Physical I/F
Transport
DDS
Application
Subscription
t3
Latency = t1 + t2 + t3
• Intended to provide time-critical information to the publisher for framework tuning where possible.
• Will not prevent data transmission and receipt.

QoS: Resource_Limits• Specifies the resources that the Service can consume to
meet requested QoS
Domain Participant
Topic
123
12
4
123
DataReader
Subscriber
max_samples: max # data samples for a single DW or DR, across all instances
max_instances: max # instances for a single DW or DR
max_samples_per_instance: max # data samples per instance
……

QoS: USER_DATA
Entity:
Domain Participant (user_data)DataReader (user_data)DataWriter (user_data)
DDS Node
ignore_participant()ignore_publication()ignore_subscription()ignore_topic()
User data can be used to authenticate an origination entity.
Remote Application
Authenticate Origin
DDS Node
Accept Entities
yes
no
Note: USER_DATA is contained within the DDS metadata.
Definition: User-defined portion of Topic metadata
Example: Security Authentication

Domains and Partitions
DDS Domain

QoS: Partition
Domain Participant
TopicA
TopicB
SubscriberPublisher
DataWriter
DataWriter
DataReader
DataReader
TopicC
DataWriter
DataReader
PartitionU,W Partition
U,Z
DataReader
Partition: Logical “namespace” for topics
** Partition string namesmust match between publisher and subscriber
Subscriber
PartitionX,Y

QoS: Quality of Service
QoS Policy Concerns Changeable
USER_DATA DP,DR,DW NO
DURABILITY T,DR,DW NO
PRESENTATION P,S NO
DEADLINE T,DR,DW YES
LATENCY_BUDGET T,DR,DW YES
OWNERSHIP T NO
OWNERSHIP_STRENGTH DW YES
LIVELINESS T,DR,DW NO
TIME_BASED_FILTER DR YES
PARTITION P,S YES
RELIABILITY T,DR,DW NO
TRANSPORT_PRIORITY T,DW YES
DESTINATION_ORDER T,DR NO
HISTORY T,DR,DW NO
RESOURCE_LIMITS T,DR,DW NO