snap-through and bifurcation of nano-arches on elastic foundation by the strain gradient and...
TRANSCRIPT

SNAP-THROUGH AND BIFURCATION OF NANO-ARCHES
ON ELASTIC FOUNDATION BY THE STRAIN GRADIENT
AND NONLOCAL THEORIES
FAREED KAVIANI* and HAMID REZA MIRDAMADI†
Department of Mechanical Engineering
Isfahan University of Technology, Isfahan 8415683111, Iran*[email protected]†[email protected]
Received 26 June 2012
Accepted 3 October 2012
Published 10 April 2013
This paper presents the snap-through and bifurcation elastic stability analysis of nano-arch type
structures with the Winkler foundation under transverse loadings by the strain gradient and
stress gradient (nonlocal) theories. The equations of equilibrium are derived by using thevariational method and virtual displacement theorem of minimum total potential energy. In
the elastic stability analysis, von Karman's nonlinear strain component is included, with the
deformation represented by a series solution. It is concluded that in general, the strain gradient
theory pushes the system away from instability as compared to the classical theory. However,the nonlocal theory does the reverse and causes the system to experience instability earlier than
that of the classical theory. Moreover, theories with di®erent small-size considerations change
the mechanism of instability in di®erent ways. For example, in similar conditions, the straingradient theory causes the system to reach a snap-through point, while the nonlocal theory
causes the system to stop at a bifurcation critical point.
Keywords: Snap-through; bifurcation; stability analysis; nano-arch type structure; strain
gradient; nonlocal.
1. Introduction
Carbon nano-tubes are among the most important nano-materials that have been
developed by nanotechnologists. They are ¯nding a wide range of applications. The
superior properties of these materials, such as mechanical, thermal, and electronic
properties used in nano-electronics, nano-devices, and nano-composites are among
the major reasons for their wide applications in various industries.1,2 Investigation
and analysis of nano-tube stability are among the engineering analyses of most
interest in the nano-community.3 There are di®erent structural models in use for the
†Corresponding author.
International Journal of Structural Stability and DynamicsVol. 13, No. 5 (2013) 1350022 (21 pages)
#.c World Scienti¯c Publishing Company
DOI: 10.1142/S0219455413500223
1350022-1
Int.
J. S
tr. S
tab.
Dyn
. Dow
nloa
ded
from
ww
w.w
orld
scie
ntif
ic.c
omby
UN
IVE
RSI
TY
OF
HO
NG
KO
NG
LIB
RA
RIE
S -
AC
QU
ISIT
ION
S SE
RV
ICE
S D
EPA
RT
ME
NT
on
05/1
1/13
. For
per
sona
l use
onl
y.

investigation of stability of nano-size structures.4�6 The models that are frequently
used for investigating the nano-size structural problems include the strain gradient7
and Eringen's nonlocal theory of elasticity.8 In the literature, researchers have pre-
sented diverse results on the problem of stability of nano-tubes by the nonlocal
theory of elasticity. Aydogdu9 used a generalized nonlocal beam theory to study the
buckling of nano-beams. He showed that by increasing the nonlocal parameter the
critical buckling load will decrease. Murmu and Pradhan10 investigated the buckling
of single-walled carbon nano-tube embedded in an elastic medium based on the
nonlocal elasticity with Timoshenko beam. They showed that the nonlocal par-
ameter can reduce the buckling load and stability of the beam. Beskou et al.11
analyzed the bending and stability of an Euler�Bernoulli beam based on a simple
linear theory of gradient elasticity with the surface energy taken into account. They
showed that this theory can increase the stability of elastic beams.
As a higher-order continuum theory, the classical coupled stress elasticity theory
originated by Mindlin, Toupin and Koiter contains four material constants for iso-
tropic materials.12,13 Fleck and Hutchinson14 reformulated and extended the classical
coupled stress theory, and renamed it as the strain gradient theory. Recently, a
modi¯ed coupled stress theory has been proposed by Yang et al.15 In this theory,
only one additional internal material parameter related to length scale is involved in
the constitutive equation, apart from those with two material constants as previously
de¯ned. Lam et al.7 proposed a modi¯ed strain gradient elasticity theory in which a
new additional equilibrium equation governs the behavior of higher-order stresses
and momentum, aside from the classical equilibrium equation. Curved beams have
found interesting applications in areas such as switches and actuators.16 Accordingly,
many researchers have studied the behavior of these structures.17 As for arch beams,
snap-through instability is a phenomenon deserving special attention, which has
been studied by numerous researchers in the ¯eld of MEMS.18 In macro size tech-
nology, this subject has been frequently studied in the static and/or dynamic
environments.19�21
The following areas are the potential areas for application of curved and snap-
through (bi-stable) micro/nano-structure devices: small-scale micro/nano- bi-stable
transformers and transducers, bi-stable actuators and sensors, micro/nano- bi-stable
switches, bi-stable relays, bi-stable multi-vibrators, bi-stable latches, etc. This is also
true for initially-curved arches and shell structures. Due to the existence of a snap-
through (bi-stable) equilibrium, they may be used as a tool for achieving pull-in
current. Other applications of this type of micro/nano-structures may be found in
Refs. 22�24.
In this research, we use two nonclassical theories, i.e. strain gradient and nonlocal
theories, to investigate the static nonlinear snap-through and bifurcation behavior of
nano shallow arches. We use a new strain gradient theory proposed by Lam et al.7 In
the nonlinear formulation, von Karman's terms of nonlinear strain are adopted for
modeling moderate rotations. A series solution procedure is proposed for solving the
F. Kaviani & H. R. Mirdamadi
1350022-2
Int.
J. S
tr. S
tab.
Dyn
. Dow
nloa
ded
from
ww
w.w
orld
scie
ntif
ic.c
omby
UN
IVE
RSI
TY
OF
HO
NG
KO
NG
LIB
RA
RIE
S -
AC
QU
ISIT
ION
S SE
RV
ICE
S D
EPA
RT
ME
NT
on
05/1
1/13
. For
per
sona
l use
onl
y.

nonlinear equilibrium equation. The results showed that small size e®ect for di®erent
theories can have di®erent directions of sti®ness change. Including the strain gra-
dient theory in the continuum formulation can improve the stability of arch beams;
however, the same is not true for the nonlocal theory. Furthermore, in some cases,
these nonclassical theories can have di®erent mechanisms of instability, as compared
with the classical theory. Thus, \small size" has an important e®ect on the analysis of
nano-arch-type structures. In other words, nonclassical analysis of these structures is
mandatory.
The following sections of the paper are arranged as follows: In Sec. 2, the non-
classical theories are formulated, the equation of motion and related boundary
conditions for both theories are derived, and the analytical solutions for equations of
motion are presented. In Sec. 3, numerical results are presented, and ¯nally in Sec. 4,
some conclusions are drawn.
2. Nonclassical Theories
2.1. Strain gradient theory
2.1.1. Basic relations
According to the strain gradient theory proposed by Lam et al.,7 the strain energy
density is a function of the symmetric strain tensor, dilatation gradient vector,
deviatoric stretch gradient tensor, and symmetric rotation gradient tensor. The
strain energy density function (Us) for linear, isotropic, gradient-dependent elastic
material occupying region S may be written as25
Us ¼1
2
ZS
ð�ij"ij þ pi�j þ �1ijk�
1ijk þmij�ijÞdv: ð1Þ
In this relation "ij, �i, �1ijk, and �ij denote respectively the strain tensor, dilatation
gradient vector, deviatoric stretch, and symmetric rotation gradient tensor, which
are de¯ned as follows:
"ij ¼ 1
2ðui;j þ uj;iÞ;
�j ¼ "kk;i;
�1ijk ¼ 1
3ð"jk;i þ "ki;j þ "ij;kÞ �
1
15ð�ijð"ll;k þ 2"lk;lÞ
þ �jkð"ll;i þ 2"li;lÞ þ �kið"ll;j þ 2"lj;lÞÞ;�ij ¼ 1
2ðeipq"qj;p þ ejpq"qi;pÞ;
ð2Þ
where ui is the displacement vector, �ij, and eipq are, respectively, the Kronecker
delta and alternating tensor. The classical stress (�ijÞ and higher-order stresses
Snap-through and Bifurcation of Nano-Arches on Elastic Foundation
1350022-3
Int.
J. S
tr. S
tab.
Dyn
. Dow
nloa
ded
from
ww
w.w
orld
scie
ntif
ic.c
omby
UN
IVE
RSI
TY
OF
HO
NG
KO
NG
LIB
RA
RIE
S -
AC
QU
ISIT
ION
S SE
RV
ICE
S D
EPA
RT
ME
NT
on
05/1
1/13
. For
per
sona
l use
onl
y.

(pi, �1ijk, and mijÞ are de¯ned as
�ij ¼ �"ij�ij þ 2G~"ij;
pi ¼ 2l20G�i;
� 1ijk ¼ 2l21G�1ijk;
mij ¼ 2l22G�ij:
ð3Þ
In the above equation, � and G are the bulk and shear moduli, respectively, l0, l1,
and l2 are the material length scale parameters related to dilatation, deviatoric
stretch, and rotation gradients, respectively. The deviatoric strain (~"ij) is given by
~"ij ¼ "ij �1
3"pp�ij: ð4Þ
Consider a slender arch of small initial curvature in Fig. 1. The assumption
of a slender beam is satis¯ed except that it has an initial shape with the un-
deformed mid-line characterized by w0ðxÞ. Using uðxÞ and wðxÞ to denote the
displacements in longitudinal and transversal directions, the only strain component
is de¯ned as
"11 ¼@u
@xþ 1
2
@w
@x
� �2
� 1
2
@w0
@x
� �2
� z@ 2w
@x2� @ 2w0
@x2
� �: ð5Þ
Fig. 1. (Color online) Nano-arch shallow beam resting on an elastic foundation under transverse loadings.
F. Kaviani & H. R. Mirdamadi
1350022-4
Int.
J. S
tr. S
tab.
Dyn
. Dow
nloa
ded
from
ww
w.w
orld
scie
ntif
ic.c
omby
UN
IVE
RSI
TY
OF
HO
NG
KO
NG
LIB
RA
RIE
S -
AC
QU
ISIT
ION
S SE
RV
ICE
S D
EPA
RT
ME
NT
on
05/1
1/13
. For
per
sona
l use
onl
y.

By substituting Eq. (5) into Eqs. (2)�(4), one obtains the nonzero components of
Eq. (2) as
�1 ¼@ 2u
@x2þ @w
@x
@ 2w
@x2� @w0
@x
@ 2w0
@x2� z
@ 3w
@x3� @ 3w0
@x3
� �;
�3 ¼ � @ 2w
@x2� @ 2w0
@x2
� �;
�12 ¼ �21 ¼ � 1
2
@ 2w
@x2� @ 2w0
@x2
� �;
�1111 ¼2
5
@ 2u
@x2þ @w
@x
@ 2w
@x2� @w0
@x
@ 2w0
@x2� z
@ 3w
@x3� @ 3w0
@x3
� �� �;
�1113 ¼ �1311 ¼ �1131 ¼ � 4
15
@ 2w
@x2� @ 2w0
@x2
� �;
�1122 ¼ �1133 ¼ �1212 ¼ �1221 ¼ �1313 ¼ �1331
¼ � 1
5
@ 2u
@x2þ @w
@x
@ 2w
@x2
�� @w0
@x
@ 2w0
@x2� z
@ 3w
@x3� @ 3w0
@x3
� ��;
�1223 ¼ �1232 ¼ �1322 ¼1
15
@ 2w
@x2� @ 2w0
@x2
� �;
�1333 ¼1
5
@ 2w
@x2� @ 2w0
@x2
� �:
ð6Þ
Consequently, by substituting Eq. (6) into Eq. (3), one obtains the nonzero com-
ponents of classical and higher-order stresses as
�11 ¼ E"11 ¼ E@u
@xþ 1
2
@w
@x
� �2
� 1
2
@w0
@x
� �2
� z@ 2w
@x2� @ 2w0
@x2
� �� �;
p1 ¼ 2l20G@ 2u
@x2þ @w
@x
@ 2w
@x2� @w0
@x
@ 2w0
@x2� z
@ 3w
@x3� @ 3w0
@x3
� �� �;
p3 ¼ �2l20G@ 2w
@x2� @ 2w0
@x2
� �;
m12 ¼ m21 ¼ �l22G@ 2w
@x2� @ 2w0
@x2
� �;
� 1111 ¼
4
5l21G
@ 2u
@x2þ @w
@x
@ 2w
@x2� @w0
@x
@ 2w0
@x2� z
@ 3w
@x3� @ 3w0
@x3
� �� �;
� 1113 ¼ � 1
131 ¼ � 1311 ¼ � 8
15l21G
@ 2w
@x2� @ 2w0
@x2
� �;
Snap-through and Bifurcation of Nano-Arches on Elastic Foundation
1350022-5
Int.
J. S
tr. S
tab.
Dyn
. Dow
nloa
ded
from
ww
w.w
orld
scie
ntif
ic.c
omby
UN
IVE
RSI
TY
OF
HO
NG
KO
NG
LIB
RA
RIE
S -
AC
QU
ISIT
ION
S SE
RV
ICE
S D
EPA
RT
ME
NT
on
05/1
1/13
. For
per
sona
l use
onl
y.

� 1122 ¼ � 1
133 ¼ � 1212 ¼ � 1
221 ¼ � 1313 ¼ � 1
331
¼ � 2
5l21G
@ 2u
@x2
�� @w
@x
@ 2w
@x2� @w0
@x
@ 2w0
@x2� z
@ 3w
@x3� @ 3w0
@x3
� ��;
� 1223 ¼ � 1
232 ¼ � 1322 ¼
2
15l21G
@ 2w
@x2� @ 2w0
@x2
� �;
� 1333 ¼
2
5l21G
@ 2w
@x2� @ 2w0
@x2
� �:
ð7ÞBy substituting the stresses and strains into Eq. (1), the strain energy density
function is calculated as
Us ¼1
2
ZS
�ij"ij þ pi�j þ �1ijk�
1ijk þmij�ij
� �dv
¼ 1
2
Z L
0
ZA
Ez2 þG 2l20 þ
120
225l21 þ l22
� �" #@ 2w
@x2� @ 2w0
@x2
!2
(
þ z2G 2l20 þ4
5l21
� �@ 3w
@x3 � @ 3w0
@x3
!2
þ E@u
@xþ 1
2
@w
@x
� �2
� 1
2
@w0
@x
� �2" #
2
þG 2l20 þ4
5l21
� �@u
@xþ 1
2
@w
@x
� �2
"
� 1
2
@w0
@x
� �2
� z@ 2w
@x2� @ 2w0
@x2
!#2)dAdx: ð8Þ
By neglecting the initial curvature w0 of the beam, Eq. (8) would reduce to the strain
energy density function derived by Kahrobaiyan et al.26
2.1.2. Equilibrium equations for strain gradient
Here, the governing equations are derived using the principle of virtual displacements
as given below:
�UT ¼ �Us þ �Up ¼ 0; ð9Þ
where UT , Us, and Up are the total potential energy density function, strain energy
density function, and the work done by the conservative external loads acting on the
structure, respectively. The work done by the external loads acting on the nano-arch
beam resting on a Winkler elastic foundation and the transverse load P ðxÞ acting on
F. Kaviani & H. R. Mirdamadi
1350022-6
Int.
J. S
tr. S
tab.
Dyn
. Dow
nloa
ded
from
ww
w.w
orld
scie
ntif
ic.c
omby
UN
IVE
RSI
TY
OF
HO
NG
KO
NG
LIB
RA
RIE
S -
AC
QU
ISIT
ION
S SE
RV
ICE
S D
EPA
RT
ME
NT
on
05/1
1/13
. For
per
sona
l use
onl
y.

the beam is de¯ned as
Up ¼Z L
0
P ðxÞw� 1
2Kwðw� w0Þ2
� �dx; ð10Þ
where P ðxÞ is the transversal distributed force per unit length, andKw is the Winkler
foundation modulus. By substituting Eqs. (10) and (8) into Eq. (9) and separating
the resulting equation with respect to the virtual displacements �u and �w, the
equilibrium equations for the strain gradient theory can be obtained as follows:
(a) Equilibrium in the u direction:
@
@xEA
@u
@xþ 1
2
@w
@x
� �2
� 1
2
@w0
@x
� �2
� ��
� GA 2l20 þ4
5l21
� �@ 2
@x2
@u
@xþ 1
2
@w
@x
� �2
� 1
2
@w0
@x
� �2
� ��¼ 0; ð11aÞ
(b) Equilibrium in the w direction:
� @
@xEA
@u
@xþ 1
2
@w
@x
� �2
� 1
2
@w0
@x
� �2
� ���
� GA 2l20 þ4
5l21
� �@ 2
@x2
@u
@xþ 1
2
@w
@x
� �2
� 1
2
@w0
@x
� �2
� ��@w
@x
�
þ ðEI þ �Þ @ 4w
@x4� @ 4w0
@x4
� ��
@ 6w
@x6� @ 6w0
@x6
� �
� P ðxÞ þKwðw� w0Þ ¼ 0; ð11bÞwhere A is the arch cross-sectional area and I the area moment of inertia of the nano-
arch cross-section, and the parameters � and are de¯ned as
� ¼ GA 2l20 þ8
15l21 þ l22
� �;
¼ GI 2l20 þ4
5l21
� �:
ð12Þ
Let us denote N as
N ¼EA@u
@xþ 1
2
@w
@x
� �2
� 1
2
@w0
@x
� �2
� �
�GA 2l20 þ4
5l21
� �@ 2
@x2
@u
@xþ 1
2
@w
@x
� �2
� 1
2
@w0
@x
� �2
� �: ð13Þ
From Eq. (11a) and Eq. (13), one has
@N
@x¼ 0: ð14Þ
Snap-through and Bifurcation of Nano-Arches on Elastic Foundation
1350022-7
Int.
J. S
tr. S
tab.
Dyn
. Dow
nloa
ded
from
ww
w.w
orld
scie
ntif
ic.c
omby
UN
IVE
RSI
TY
OF
HO
NG
KO
NG
LIB
RA
RIE
S -
AC
QU
ISIT
ION
S SE
RV
ICE
S D
EPA
RT
ME
NT
on
05/1
1/13
. For
per
sona
l use
onl
y.

Accordingly, N should be constant and can be obtained from Eq. (15) as
N ¼ 1
L
Z L
0
EA@u
@xþ 1
2
@w
@x
� �2
� 1
2
@w0
@x
� �2
� ��
�GA 2l20 þ4
5l21
� �@ 2
@x2
@u
@xþ 1
2
@w
@x
� �2
� 1
2
@w0
@x
� �2
� ��dx: ð15Þ
It is noted that, if the supports are immovable, then uð0Þ ¼ uðLÞ ¼ 0. Thus, the
expression for N; after averaging by integration over the length, becomes
N ¼ 1
2L
Z L
0
EA@w
@x
� �2
� @w0
@x
� �2
� ��
�GA 2l20 þ4
5l21
� �@ 2
@x2
@w
@x
� �2
� @w0
@x
� �2
� ��dx ð16Þ
By substituting Eq. (16) into Eq. (11b), the equation of equilibrium can be ob-
tained as
� @
@x
@w
@x
1
2L
Z L
0
EA@w
@x
� �2
� @w0
@x
� �2
� ���
� GA 2l20 þ4
5l21
� �@ 2
@x2
@w
@x
� �2
� @w0
@x
� �2
� ��dx
�þ ðEI þ �Þ
� @ 4w
@x4� @ 4w0
@x4
� ��
@ 6w
@x6� @ 6w0
@x6
� �� P ðxÞ þKwðw� w0Þ ¼ 0: ð17Þ
We note that Eq. (17) is a sixth-order di®erential equation of a shallow nano-arch
based on strain gradient theory, as opposed to the fourth-order di®erential equation
of a shallow macro-arch developed based on classical continuum theory. In Eq. (17),
by neglecting the material length scale parameters, one has � ¼ 0 and ¼ 0, which is
the case for the classical form of the equilibrium equation of the macro-arch beam
under transverse loads, as was presented in Ref. 27. In this study, only simply-
supported nano-arch beams are considered. For a simply-supported nano-arch beam,
one has the following geometrical boundary conditions:
wð0Þ � w0ð0Þ ¼ wðLÞ � w0ðLÞ ¼ 0: ð18Þ
The partial nonclassical natural boundary conditions for a partial strain gradient
theory and for a simply-supported nano-arch are based on zero bending moments at
the two ends, i.e. Mx¼0;L ¼ 0. The bending moment is a superposition of two e®ects:
a classical but higher-order bending moment, M1 ¼RAðz�1 þ p3 þ �1113 þm12ÞdA;
and a nonclassical bending moment, M2 ¼RAzðp1 þ �1111ÞdA. The corresponding
terms of bending moment in the strain energy density function are UM ¼ � 12
RA
½M1@ 2w@x2 þM2
@ 3w@x 3 �dx. After integration by parts, the ¯nal result for the classical but
F. Kaviani & H. R. Mirdamadi
1350022-8
Int.
J. S
tr. S
tab.
Dyn
. Dow
nloa
ded
from
ww
w.w
orld
scie
ntif
ic.c
omby
UN
IVE
RSI
TY
OF
HO
NG
KO
NG
LIB
RA
RIE
S -
AC
QU
ISIT
ION
S SE
RV
ICE
S D
EPA
RT
ME
NT
on
05/1
1/13
. For
per
sona
l use
onl
y.

higher-order part of bending moment is as follows:
EI þGA 2l20 þ8
15l21 þ l22
� �� �@ 2w
@x2� @ 2w0
@x2
� ��
�GI 2l20 þ4
5l21
� �@ 4w
@x4� @ 4w0
@x4
� ��x¼0;L
¼ 0: ð19aÞ
By using the de¯nitions in Eq. (12), one has
ðEI þ �Þ @ 2w
@x2� @ 2w0
@x2
� ��
@ 4w
@x4� @ 4w0
@x4
� �� �x¼0;L
¼ 0: ð19bÞ
Before one proceeds with the analytical solution, it is convenient to express all of the
parameters in a nondimensional form. The nondimensional parameters are de¯ned as
�x ¼ x
L; Wð�xÞ ¼ wðxÞ
�; �Kw ¼ KwL4
4EI; �Pð�xÞ ¼ P ðxÞL4
�4EI;
� ¼ �
EI; � ¼ 2
L2EI; � ¼ �2
L2; �N ¼ NL2
2EI; � ¼
ffiffiffiffiffiI
A
r;
ð20Þ
where � is the radius of gyration for the nano-arch area beam.The nondimensional
strain gradient equilibrium equation is obtained by substituting the nondimensional
parameters in Eq. (20) into Eq. (17), namely,
��@ 6W
@�x 6� @ 6W0
@�x 6
� �þ ð1þ �Þ @ 4W
@�x 4� @ 4W0
@�x 4
� �
� �N@ 2W
@�x 2þ �Kw W �W0ð Þ � �PðxÞ ¼ 0: ð21Þ
Therefore, the expression for �N becomes
�N ¼ 1
2
Z
0
@W
@�x
� �2
� @W0
@�x
� �2
� �� �
@ 2
@�x 2
@W
@�x
� �2
� @W0
@�x
� �2
� �� �d�x: ð22Þ
The boundary conditions are as follows:
Wð0Þ �W0ð0Þ ¼ WðLÞ �W0ðLÞ ¼ 0
ð1þ �Þ @ 2W
@�x 2� @ 2W0
@�x 2
� �� �
@ 4W
@�x 4� @ 4W0
@�x 4
� �� �x¼0;L
¼ 0:ð23Þ
2.1.3. Analytical solution for strain gradient
An initial curvature of half-sine is assumed for a shallow nano-arch that is simply-
supported and loaded by a half-sine spatially-distributed force, i.e.
W0 ¼ c0 sinð�xÞ; ð24Þ
Snap-through and Bifurcation of Nano-Arches on Elastic Foundation
1350022-9
Int.
J. S
tr. S
tab.
Dyn
. Dow
nloa
ded
from
ww
w.w
orld
scie
ntif
ic.c
omby
UN
IVE
RSI
TY
OF
HO
NG
KO
NG
LIB
RA
RIE
S -
AC
QU
ISIT
ION
S SE
RV
ICE
S D
EPA
RT
ME
NT
on
05/1
1/13
. For
per
sona
l use
onl
y.

where c0 is the initial rise parameter. The expression for the loading is
P ð�xÞ ¼ P0 sinð�xÞ: ð25ÞThe de°ection may be obtained by an in¯nite sine series expansion for a simply-
supported nano-arch beam, namely,
W ¼ c0 sinð�xÞ þX1n¼1
cn sinðn�xÞ: ð26Þ
Consequently, �N can be obtained as follows
�N ¼ 1
4
X1n
ðn2c2nÞ þ �n4c2n �þ 2c0c1
( ): ð27Þ
Substituting Eqs. (26) and (27) into Eq. (21) yields the following equation of
equilibrium:
�X1n
n6cn sinðn�xÞ �þ ð1þ �Þ
X1n
n4cn sinðn�xÞ �þ �Kw
X1n
cn sinðn�xÞ½ �
� P0 sinð�xÞ þ1
4
X1m
ðm2c2mÞ þ �m4c2m �þ 2c0c1
( ) !
� c0 sinð�xÞ þX1n
n2cn sinðn�xÞ � !
¼ 0: ð28Þ
By separating the sine coe±cients, the above equation breaks into two coupled
equations as in Eq. (29). In the ¯rst equation, the integer n takes the value one and in
the second equation, n takes values higher than one, that is, we could have two
distinguished modes for system deformations, as follows:
(1) Equilibrium for the ¯rst mode of nano-arch deformations,
ð1þ �þ � þ �KwÞc1 � P0
þ 1
4
X1m
ðm2c2mÞ þ �m4c2m �þ 2c0c1
( )c0 þ c1ð Þ ¼ 0; n ¼ 1: ð29aÞ
(2) Equilibrium for the higher modes of nano-arch deformations,
�n6 þ ð1þ �Þn4 þ �Kw þ 1
4
X1m
ðm2c2mÞ þ �m4c2m �þ 2c0c1
( )n2
( )cn ¼ 0;
n ¼ 2; 3; . . . :
ð29bÞEquations (29a) and (29b) could represent the basic formulation of the nano-
system including strain gradient theory for a discussion on system stability, shortly.
F. Kaviani & H. R. Mirdamadi
1350022-10
Int.
J. S
tr. S
tab.
Dyn
. Dow
nloa
ded
from
ww
w.w
orld
scie
ntif
ic.c
omby
UN
IVE
RSI
TY
OF
HO
NG
KO
NG
LIB
RA
RIE
S -
AC
QU
ISIT
ION
S SE
RV
ICE
S D
EPA
RT
ME
NT
on
05/1
1/13
. For
per
sona
l use
onl
y.

2.1.4. Stability analysis for strain gradient
As far as the stability of the nano-arch beam is concerned, the equilibrium equations
derived in Eqs. (29a) and (29b) represent the exact equilibrium equations developed
based on the strain gradient theory. Equation (29) shows the coupled behavior of the
¯rst mode with the higher modes of deformation of the nano-arch beam. Accordingly,
one can analyze Eqs. (29a) and (29b) for two possible modes of equilibrium. In the
¯rst mode of equilibrium, only the ¯rst term of the transverse displacement (c1Þ isallowed to exist, while the higher terms (cn;n ¼ 2; 3; . . .) are set to zero. In the other
mode of equilibrium, in addition to the ¯rst term of transverse displacement, there
could exist one higher term cnðn1Þ that should not be set to zero.
In the sequel, for the ¯rst mode of equilibrium, ðn ¼ 1Þ, Eq. (29b) is satis¯ed
automatically. By using Eq. (29a), the load�displacement relation can be derived as
1þ �þ � þ �Kw þ 1
2c20
� �c1 þ
3
4þ �
� �c0c
21 þ
1
4þ �
� �c31 ¼ P0: ð30Þ
For a stability analysis, the snap-through would occur at the point where sti®ness of
the nano-arch beam would be diminished to zero, or would be at the minimal point of
the load�displacement curve.
For the second mode of equilibrium, to satisfy Eq. (29b), for n ¼ j > 1, one has
�j6 þ ð1þ �Þj4 þ �Kw þ 1
4ðj2c2jÞ þ �j4c2j �þ 2c0c1�
j2 ¼ 0 j > 1: ð31Þ
By using Eq. (31), one can obtain from Eq. (29a) the following result:
ð1þ �þ � þ �KwÞc1 � P0 ��j6 þ ð1þ �Þj4 þ �Kw
j2
� �c0 þ c1ð Þ ¼ 0 j > 1: ð32Þ
Equation (32) would be established when the higher terms of displacements would
not be set to zero, which could express the behavior of the nano-arch beam based on
the strain gradient theory, together with Eq. (30). In summary, Eqs. (30) and (32)
would govern the equilibrium and stability behavior of a nano-arch resting on a
Winkler foundation and subjected to transverse loading, accounting for strain
gradient theory. Equations. (30) and (32) could represent the stability behavior
of the system for the ¯rst- and higher-order modes of the system deformations,
respectively.
2.2. Eringen's nonlocal theory
2.2.1. Basic relations
According to Eringen,8 the stress ¯eld at a point x in an elastic continuum is
dependent not only on the strain ¯eld at the point under consideration, but also on
the strains at all other points of the body. The most general form of constitutive
equation for the nonlocal elasticity involves a convolution integral over the entire
region of interest. This integral contains a kernel function that describes the relative
Snap-through and Bifurcation of Nano-Arches on Elastic Foundation
1350022-11
Int.
J. S
tr. S
tab.
Dyn
. Dow
nloa
ded
from
ww
w.w
orld
scie
ntif
ic.c
omby
UN
IVE
RSI
TY
OF
HO
NG
KO
NG
LIB
RA
RIE
S -
AC
QU
ISIT
ION
S SE
RV
ICE
S D
EPA
RT
ME
NT
on
05/1
1/13
. For
per
sona
l use
onl
y.

in°uences of strains at various locations on the stress for a given location. Thus, the
nonlocal stress tensor � at a point x is expressed as
� ¼ZV
K x 0 � xj j; �ð Þtðx 0Þdðx 0Þ; ð33Þ
where tðxÞ is the classical stress tensor at point x and the kernel function
(Kðjx 0 � xj; �ÞÞ represents a nonlocal modulus. jx 0 � xj is the distance in Euclidean
norm and � is a material constant that depends on the internal and external
characteristic lengths of the structure. According to the Hookean solid modeling, the
nonlocal constitutive equation can be represented as follows:
ð1� � 2l2r2Þ� ¼ C : "; � ¼ e0a
l2; ð34Þ
where C is the elasticity tensor and e0, l, and a are the material constant, external
characteristic length, and internal characteristic length, respectively. For the nano-
arch beam based on the Euler�Bernoulli beam theory, the only nonzero nonlocal
stress is de¯ned as
�xx � �@ 2�xx
@x2¼ E"xx; � ¼ ðe0aÞ2; ð35Þ
where � is the nonlocal parameter. When the nonlocal parameter is zero, one obtains
the constitutive relations of the local theory, as they should be.
2.2.2. Equilibrium equations for Eringen's nonlocal theory
According to the nonlocal constitutive relation, the force resultant of axial stress is
de¯ned as
N � �@ 2N
@x2¼ EA
@u
@xþ 1
2
@w
@x
� �2
� @w0
@x
� �2
� �: ð36Þ
The bending moment M, resulting from the nonlocal stress is given by
M � �@ 2M
@x2¼ �EI
@w
@x
� �2
� @w0
@x
� �2
� �: ð37Þ
By substituting Eqs. (36) and (37) into the equilibrium equation, one obtains
� 1� �@ 2
@x2
� �@
@x
1
2L
Z L
0
EA@w
@x
� �2
� @w0
@x
� �2
� �� �dx
@w
@x
� �
þ EI@ 4w
@x4� @ 4w0
@x4
� �� 1� �
@ 2
@x2
� �P ðxÞ þ 1� �
@ 2
@x2
� �Kwðw� w0Þ ¼ 0:
ð38Þ
F. Kaviani & H. R. Mirdamadi
1350022-12
Int.
J. S
tr. S
tab.
Dyn
. Dow
nloa
ded
from
ww
w.w
orld
scie
ntif
ic.c
omby
UN
IVE
RSI
TY
OF
HO
NG
KO
NG
LIB
RA
RIE
S -
AC
QU
ISIT
ION
S SE
RV
ICE
S D
EPA
RT
ME
NT
on
05/1
1/13
. For
per
sona
l use
onl
y.

Similar to the strain gradient theory, there are two geometrical boundary conditions
and two natural boundary conditions for the partial nonlocal theory, as given below:
wð0Þ � w0ð0Þ ¼ wðLÞ � w0ðLÞ ¼ 0;
@ 2w
@x2� @ 2w0
@x2
� �x¼0;L
¼ 0:ð39Þ
By substituting the nondimensional parameters in Eq. (20) into Eq. (38), the non-
dimensional nonlocal equilibrium equation is expressed as follows:
@ 4W
@�x 4� @ 4W0
@�x 4
� �� ð1� �
@ 2
@�x 2Þ �N @ 2W
@�x 2
þ 1� �@ 2
@�x 2
� ��Kw W �W0ð Þ � 1� �
@ 2
@�x 2
� ��PðxÞ ¼ 0: ð40Þ
Therefore, the expression for �N becomes
�N ¼ 1
2
Z
0
@W
@�x
� �2
� @W0
@�x
� �2
� �� �d�x: ð41Þ
The boundary conditions are converted to
W ð0Þ �W0ð0Þ ¼ W ðLÞ �W0ðLÞ ¼ 0;
@ 2W
@�x 2� @ 2W0
@�x 2
� �x¼0;L
¼ 0:ð42Þ
2.2.3. Analytical solution for Eringen's nonlocal theory
The axial force �N can be obtained as follows:
�N ¼ 1
4
X1n
ðn2c2nÞ �þ 2c0c1
( ): ð43Þ
By substituting Eqs. (26) and (43) into Eq. (40), one obtains the equilibrium
equation as
X1n
½n4cn sinðn�xÞ� þ �Kw
X1n
½ð1þ �n2Þcn sinðn�xÞ� � ð1þ �ÞP0 sinð�xÞ
þ 1
4
X1m
½ðm2c2mÞ� þ 2c0c1
( ) !ð1þ �Þc0 sinð�xÞð
þX1n
ð1þ �n2Þn2cn sinðn�xÞ �! ¼ 0: ð44Þ
By separating the sine coe±cients, Eq. (44) breaks into two coupled equations as
given by Eqs. (45a) and (45b). In Eq. (45a), the integer n is allowed to take the value
one while in Eq. (45b) the integer n can take values other than one; namely, we could
Snap-through and Bifurcation of Nano-Arches on Elastic Foundation
1350022-13
Int.
J. S
tr. S
tab.
Dyn
. Dow
nloa
ded
from
ww
w.w
orld
scie
ntif
ic.c
omby
UN
IVE
RSI
TY
OF
HO
NG
KO
NG
LIB
RA
RIE
S -
AC
QU
ISIT
ION
S SE
RV
ICE
S D
EPA
RT
ME
NT
on
05/1
1/13
. For
per
sona
l use
onl
y.

have two distinguished modes for system deformations, as follows:
(1) Equilibrium for the ¯rst mode of nano-arch deformations,
ð1þ ð1þ �Þ �KwÞc1 � ð1þ �ÞP0
þ ð1þ �Þ4
X1m
ðm2c2mÞ �þ 2c0c1
( )c0 þ c1ð Þ ¼ 0; n ¼ 1: ð45aÞ
(2) Equilibrium for the higher modes of nano-arch deformations,
ðn4 þ ð1þ �n2Þ �Kw þ ð1þ �n2Þ4
X1m
ðm2c2mÞ �þ 2c0c1
( )n2
( )cn ¼ 0;
n ¼ 2; 3; . . . : ð45bÞ
Equations (45a) and (45b) would establish the basic formulation of the nano-system
including Eringen's nonlocal theory for the coming discussion of system stability.
2.2.4. Stability analysis for Eringen's nonlocal theory
The equilibrium equations derived in Eqs. (45a) and (45b) represent the exact
equilibrium equations developed based on the Eringen's nonlocal theory. Equations
(45a) and (45b) would depict the coupled behavior of the ¯rst mode with the higher
modes of deformations of the nano-system. Therefore, one could analyze Eqs. (45a)
and (45b) for two possible equilibrium modes. In the ¯rst mode of equilibrium, only
the ¯rst term of the transverse displacement (c1) is allowed to exist, while the higher-
order terms (cn;n ¼ 2; 3; . . .) are set to be zero. In the other mode of equilibrium, in
addition to the ¯rst term of transverse displacement, there exists one higher-order
term cnðn > 1Þ that should not be set to zero for observing more mechanisms of
stable and unstable equilibria.
Next, for the ¯rst mode of equilibrium, ðn ¼ 1Þ, Eq. (45b) is satis¯ed automati-
cally. By using Eq. (45a), the load�displacement relation can be obtained as
1
1þ �þ �Kw þ 1
2c20
� �c1 þ
3
4c0c
21 þ
1
4c31 ¼ P0: ð46Þ
For the second mode of equilibrium, to satisfy Eq. (45b), for n ¼ j, one has
j4 þ ð1þ �j2Þ �Kw þ ð1þ �j2Þ4
j2c2j þ 2c0c1�
j2 ¼ 0 j > 1: ð47Þ
By using preceding equation, one obtains from Eq. (45a) the following relation:
ð1þ ð1þ �Þ �KwÞc1 � ð1þ �ÞP0 �ð1þ �Þð1þ �j2Þ j4 þ ð1þ �j2Þ �Kw
� c0 þ c1ð Þ ¼ 0 j > 1:
ð48Þ
F. Kaviani & H. R. Mirdamadi
1350022-14
Int.
J. S
tr. S
tab.
Dyn
. Dow
nloa
ded
from
ww
w.w
orld
scie
ntif
ic.c
omby
UN
IVE
RSI
TY
OF
HO
NG
KO
NG
LIB
RA
RIE
S -
AC
QU
ISIT
ION
S SE
RV
ICE
S D
EPA
RT
ME
NT
on
05/1
1/13
. For
per
sona
l use
onl
y.

Equation (48) would be established when the higher-order terms of displacements
would not set to zero. This equation expresses the behavior of the nano-arch beam
based on Eringen's nonlocal theory, besides Eq. (46). In summary, Eqs. (46) and (48)
would govern the stability behavior of a nano-arch resting on a Winkler foundation
and subjected to transverse loading, including Eringen's nonlocal theory.
3. Numerical Results
3.1. Validation
To validate the analytical solutions derived based on strain gradient and Eringen's
nonlocal theories, the e®ect of the nonclassical theories are discarded herein, and the
resulting equation is compared with that of Ref. 27. The derived formulations for the
strain gradient theory, i.e.Eqs. (30) and (32), andEringen's nonlocal theory, i.e. Eqs. (46)
and (48), without the e®ects of small-size could reduce to the equation appearing in the
Ref. 27, developed for the classical (local) structural systems, as follows:
j2c2j þ c0 þ c1ð Þ2� ¼ c0ð Þ2 � 4n4 þ �Kw
n2: ð49Þ
In this study, the equilibrium equations were derived for both the strain gradient and
Eringen's nonlocal theories, which could be used to investigate the existence of higher-
order deformationmodes. In what follows, we use the equilibrium equations (29b) for the
strain gradient theory and (45b) for Eringen's nonlocal theory.
3.2. Strain gradient theory
For the strain gradient theory, one has
j2 þ �j4½ �1þ �
c2j þc0
1þ �þ c1
� �2
� �¼ c0
1þ �
� �2
� 4�n6 þ ð1þ �Þn4 þ �Kw
ð1þ �Þn2: ð50Þ
Equation (50) represents an elliptical shape of the equilibrium equation in c1 � cjspace, which limits the existence of cj mode. According to this equation, the existence
of cj mode is possible only when the right side of the equation is positive, namely,
c01þ �
� �2
> 4�n6 þ ð1þ �Þn4 þ �Kw
ð1þ �Þn2: ð51Þ
In one special case, all of the characteristic lengths, l0, l1, and l2, could be selected the
same. Accordingly, the nondimensional small size parameters in the strain gradient
theory (� and �) are related to each other by �=� ¼ 149=126.
3.3. Eringen's nonlocal theory
For the nonlocal theory, Eq. (51) can be expressed as follows:
ðc0Þ2 > 4n2
ð1þ �n2Þ þ�Kw
n2
� �: ð52Þ
Snap-through and Bifurcation of Nano-Arches on Elastic Foundation
1350022-15
Int.
J. S
tr. S
tab.
Dyn
. Dow
nloa
ded
from
ww
w.w
orld
scie
ntif
ic.c
omby
UN
IVE
RSI
TY
OF
HO
NG
KO
NG
LIB
RA
RIE
S -
AC
QU
ISIT
ION
S SE
RV
ICE
S D
EPA
RT
ME
NT
on
05/1
1/13
. For
per
sona
l use
onl
y.

3.4. Classical (local) theory
For the classical analysis, Eq. (50) can be shown as follows:
ðc0Þ2 > 4 n2 þ�Kw
n2
� �: ð53Þ
3.5. Comparison of di®erent theories
The possible positions of displacements, for both Eringen's nonlocal and strain
gradient theories, are shown in Fig. 2. For this example, n ¼ 2, �Kw ¼1, c0 ¼ 5.5,
� ¼ 0:05, and � ¼ 0:05 are considered. It is observed that under the external loading,
the absolute value of a1 will increase. When both of Eqs. (52) and (53) are satis¯ed,
after c1 reaches a critical value, cn-modes will appear. This point is a bifurcation
point where the nano-arch will be unstable after this point. It is observed that for the
strain gradient theory, the stability of nano-arch beam will last longer than that of
the classical theory, and the critical load corresponding to the bifurcation will occur
after passing the value corresponding to the classical theory. However, for the clas-
sical theory, the nano-arch beam will last longer, as a stable system, compared with
the nonlocal theory. The results shown in Fig. 2 indicate a complete agreement of the
present theories with those of Ref. 27 for the case that the small-size e®ect was not
considered.
Let us consider ¯rst the case where higher modes of deformation do not exist in
the behavior of the nano-arch beam. According to the classical theory, there are two
variants for this case, one for c0 � 2ffiffiffiffiffiffiffiffiffiffiffiffiffiffikw þ 1
pand the other for c0 > 2
ffiffiffiffiffiffiffiffiffiffiffiffiffiffikw þ 1
p. For
the ¯rst condition with c0 � 2ffiffiffiffiffiffiffiffiffiffiffiffiffiffikw þ 1
p, there is a one-to-one correspondence between
the loading and the deformation. Accordingly, neither snap-through nor bifurcation
Fig. 2. (Color online) Higher-order term (n ¼ 2) of the deformation sine series versus the ¯rst-order term
(n ¼ 1) of the deformation sine series for the classical, strain gradient, and Eringen's nonlocal theories.
F. Kaviani & H. R. Mirdamadi
1350022-16
Int.
J. S
tr. S
tab.
Dyn
. Dow
nloa
ded
from
ww
w.w
orld
scie
ntif
ic.c
omby
UN
IVE
RSI
TY
OF
HO
NG
KO
NG
LIB
RA
RIE
S -
AC
QU
ISIT
ION
S SE
RV
ICE
S D
EPA
RT
ME
NT
on
05/1
1/13
. For
per
sona
l use
onl
y.

will occur. For the second condition with c0 > 2ffiffiffiffiffiffiffiffiffiffiffiffiffiffikw þ 1
p, there is no such one-to-one
correspondence and the nano-arch beam will encounter instability for that special
loading. Figure 3 shows the condition with c0 � 2ffiffiffiffiffiffiffiffiffiffiffiffiffiffikw þ 1
p, for which the e®ects of
the nonclassical theories are investigated. It can be observed that for the nonlocal
analysis, the nano-arch beam can become unstable and the snap-through can occur,
while the local analysis shows that the nano-arch is stable.
Figure 4 shows the second condition with c0 > 2ffiffiffiffiffiffiffiffiffiffiffiffiffiffikw þ 1
p, for which the e®ect of
non-classical theories is investigated. It can be observed that for the strain gradient
Fig. 3. (Color online) Nondimensional load versus the ¯rst-order term (n ¼ 1) of the deformation sine
series for the classical and nonclassical theories, for c0 ¼ 3:4, �Kw ¼ 2:0, � ¼ 0:5, and � ¼ 0:5.
Fig. 4. (Color online) Nondimensional load versus the ¯rst-order term (n ¼ 1) of the deformation sine
series for the classical and nonclassical theories, for c0 ¼ 4:0, �Kw ¼ 2:0, � ¼ 0:5, and � ¼ 0:5.
Snap-through and Bifurcation of Nano-Arches on Elastic Foundation
1350022-17
Int.
J. S
tr. S
tab.
Dyn
. Dow
nloa
ded
from
ww
w.w
orld
scie
ntif
ic.c
omby
UN
IVE
RSI
TY
OF
HO
NG
KO
NG
LIB
RA
RIE
S -
AC
QU
ISIT
ION
S SE
RV
ICE
S D
EPA
RT
ME
NT
on
05/1
1/13
. For
per
sona
l use
onl
y.

analysis the nano-arch beam is stable, while for the classical analysis, it can become
unstable.
One of the most important cases in instability analysis of the nano-arch beams is
related to the condition where the higher-order terms do exist. This case will occur in
the classical analysis for the condition of ðc0Þ2 > 4ðn2 þ �Kw
n2 Þ. To investigate this case,one can have recourse to Eqs. (48) and (46). In Fig. 5, this case is investigated for the
classical and nonclassical theories. For each theory, there are two curves, one related
Fig. 5. (Color online) Nondimensional load versus the ¯rst-order term (n ¼ 1) of the deformation sine
series for the classical and nonclassical theories, for c0 ¼ 5:0, �Kw ¼ 1:0, � ¼ 0:01, and � ¼ 0:01:
Fig. 6. (Color online) Nondimensional load versus the ¯rst-order term (n ¼ 1) of the deformation sine
series for the classical and nonclassical theories, for c0 ¼ 5:0, �Kw ¼ 1:0, � ¼ 0:03, and � ¼ 0:03.
F. Kaviani & H. R. Mirdamadi
1350022-18
Int.
J. S
tr. S
tab.
Dyn
. Dow
nloa
ded
from
ww
w.w
orld
scie
ntif
ic.c
omby
UN
IVE
RSI
TY
OF
HO
NG
KO
NG
LIB
RA
RIE
S -
AC
QU
ISIT
ION
S SE
RV
ICE
S D
EPA
RT
ME
NT
on
05/1
1/13
. For
per
sona
l use
onl
y.
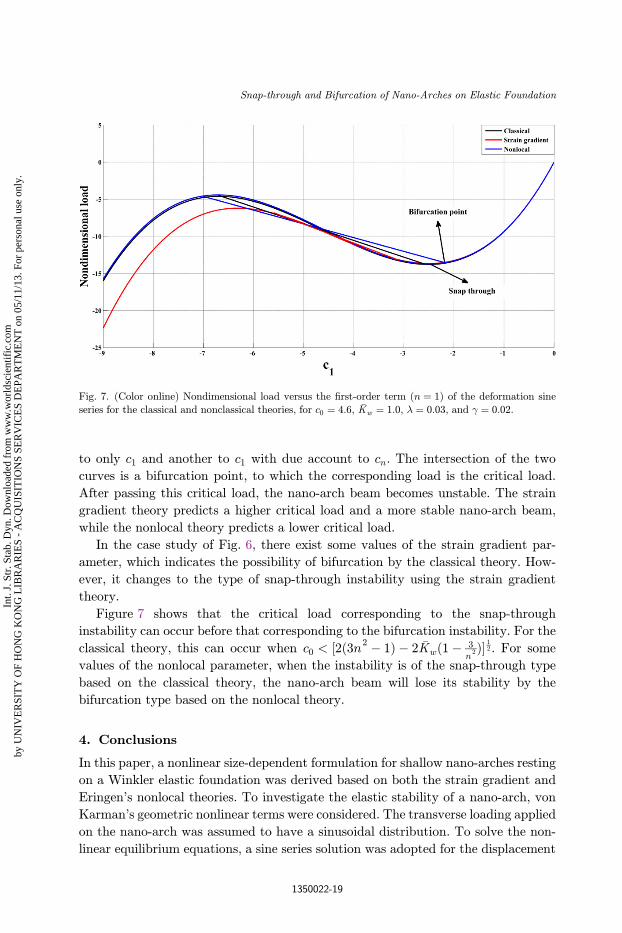
to only c1 and another to c1 with due account to cn. The intersection of the two
curves is a bifurcation point, to which the corresponding load is the critical load.
After passing this critical load, the nano-arch beam becomes unstable. The strain
gradient theory predicts a higher critical load and a more stable nano-arch beam,
while the nonlocal theory predicts a lower critical load.
In the case study of Fig. 6, there exist some values of the strain gradient par-
ameter, which indicates the possibility of bifurcation by the classical theory. How-
ever, it changes to the type of snap-through instability using the strain gradient
theory.
Figure 7 shows that the critical load corresponding to the snap-through
instability can occur before that corresponding to the bifurcation instability. For the
classical theory, this can occur when c0 < ½2ð3n2 � 1Þ � 2 �Kwð1� 3n2Þ� 12 . For some
values of the nonlocal parameter, when the instability is of the snap-through type
based on the classical theory, the nano-arch beam will lose its stability by the
bifurcation type based on the nonlocal theory.
4. Conclusions
In this paper, a nonlinear size-dependent formulation for shallow nano-arches resting
on a Winkler elastic foundation was derived based on both the strain gradient and
Eringen's nonlocal theories. To investigate the elastic stability of a nano-arch, von
Karman's geometric nonlinear terms were considered. The transverse loading applied
on the nano-arch was assumed to have a sinusoidal distribution. To solve the non-
linear equilibrium equations, a sine series solution was adopted for the displacement
Fig. 7. (Color online) Nondimensional load versus the ¯rst-order term (n ¼ 1) of the deformation sineseries for the classical and nonclassical theories, for c0 ¼ 4:6, �Kw ¼ 1:0, � ¼ 0:03, and � ¼ 0:02.
Snap-through and Bifurcation of Nano-Arches on Elastic Foundation
1350022-19
Int.
J. S
tr. S
tab.
Dyn
. Dow
nloa
ded
from
ww
w.w
orld
scie
ntif
ic.c
omby
UN
IVE
RSI
TY
OF
HO
NG
KO
NG
LIB
RA
RIE
S -
AC
QU
ISIT
ION
S SE
RV
ICE
S D
EPA
RT
ME
NT
on
05/1
1/13
. For
per
sona
l use
onl
y.

of the simply-supported boundary arch. To investigate di®erent small-size e®ects,
both the stress gradient theory (Eringen's nonlocal) and the strain gradient theories
were adopted. The results showed that the instability in the nano-arch can occur in
two di®erent modes either by snap-through or by bifurcation instabilities. The modes
of deformation of the nano-arch are related to the system parameters, such as the
initial curvature of the nano-arch, the foundation modulus, and the small-size par-
ameters used in the nonclassical strain gradient and Eringen's nonlocal theories.
Therefore, for di®erent system parameters, the system showed di®erent modes of
deformation. Overall, two cases are possible for the deformation of the nano-arch. In
the ¯rst case, the nano-arch is deformed by the ¯rst-order term of the sine series
solution, and in the second case, only, one higher-order term together with the ¯rst-
order term of the deformation can exist. The system parameters can prescribe the
deformation of the problem considered. For the ¯rst case, the only possible type of
instability is snap-through, but for the second case, the instability mechanism can be
either snap-through or bifurcation. The system parameter might specify the mech-
anism of instability in both cases. The small-size parameter in the strain gradient
theory can make the systemmore stable. By increasing the strain gradient parameter,
the critical load will increase. However, Eringen's nonlocal theory can reduce the
stability of the nano-arch. By increasing the nonlocal parameter inmost occasions, the
critical load will decrease. The foundation modulus can increase the stability of
the system and in some cases can change the type of mechanism for instability.
References
1. K. T. Lau and H. Hui, The revolutionary creation of new advanced materials — carbonnanotubes, Compos. B 33(4) (2001) 263.
2. P. M. Ajayan and Z. O. Zhou, Application of carbon nanotubes, Top. Appl. Phys. 80(2001) 391�425.
3. Y. P. Liu and J. N. Reddy, A nonlocal curved beam model based on a modi¯ed couplestress theory, Int. J. Struct. Stab. Dyn. 11(3) (2011) 495�512.
4. J. N. Reddy, Nonlocal theories for bending, buckling and vibration of beams, Int. J. Eng.Sci. 45 (2007) 288�307.
5. Q. Wang, F. Xu and G. Y. Zhou, Continuum model for stability analysis of carbonnanotubes under initial bend, Int. J. Struct. Stab. Dyn. 5(4) (2005) 579�595.
6. C. M. Wang, Z. Y. Tay, A. N. R. Chowdhuary, W. H. Duan, Y. Y. Zhang and N.Silvestre, Examination of cylinrical shell theories for buckling of carbon nanotubes, Int. J.Struct. Stab. Dyn. 11(6) (2011) 1035�1058.
7. D. C. C. Lam, F. Yang, A. C. M. Chong, J. Wang and P. Tong, Experiments and theoryin strain gradient elasticity, J. Mech. Phys. Solids. 51(8) (2003) 1477�1508.
8. A. C. Eringen, On di®erential equations of nonlocal elasticity and solutions of screwdislocation and surface waves, J. Appl. Phys. 54(9) (1993) 4703�4710.
9. M. Aydogdu, A general nonlocal beam theory: Its application to nanobeam bending,buckling and vibration, Physica E 41(9) (2009) 1651�1655.
10. T. Murmu and S. C. Pradhan, Buckling analysis of a single-walled carbon nanotubeembedded in an elastic medium based on nonlocal elasticity and Timoshenko beam theoryand using DQM, Physica E 41(7) (2009) 1232�1239.
F. Kaviani & H. R. Mirdamadi
1350022-20
Int.
J. S
tr. S
tab.
Dyn
. Dow
nloa
ded
from
ww
w.w
orld
scie
ntif
ic.c
omby
UN
IVE
RSI
TY
OF
HO
NG
KO
NG
LIB
RA
RIE
S -
AC
QU
ISIT
ION
S SE
RV
ICE
S D
EPA
RT
ME
NT
on
05/1
1/13
. For
per
sona
l use
onl
y.

11. S. P. Beskou, K. G. Tsepoura, D. Polyzos and D. E. Beskos, Bending and stability ofgradient elastic beams, Int. J. Solids. Struct. 40(2) (2003) 385�400.
12. R. D. Mindlin, Second gradient of strain and surface-tension in linear elasticity, Int. J.Solids. Struct. 1(4) (1965) 417�438.
13. R. A. Toupin, Elastic materials with couple-stresses, Arch. Ration. Mech. An. 11(1)(1962) 385�414.
14. N. A. Fleck and J. W. Hutchinson, A reformulation of strain gradient plasticity, J. Mech.Phys. Solids. 49(10) (2001) 2245�2271.
15. F. Yang, A. C. M. Chong, D. C. C. Lam and P. Tong, Couple stress based strain gradienttheory for elasticity, Int. J. Solids. Struct. 39(10) (2002) 2731�2743.
16. M. I. Younis, H. M. Ouakad and F. M. Alsaleem, Pre-shaped buckled-beam actuators:Theory and experiments, Sensors Actuat. A-Phys. 148(1) (2008) 186�192.
17. G. J. Simitses, Snapping of low pinned arches on an elastic foundation, J. Appl. Mech. 40(3) (1973) 741�744.
18. K. Das and R. C. Batra, Symmetry breaking, snap-through and pull-in instabilities underdynamic loading of microelectromechanical shallow arches, Smart Mater. Struct. 18(11)(2009) 15.
19. I. Raftoyiannis and G. T. Michaltsos, Curved-in-plane cable-stayed bridges: A math-ematical model, Int. J. Struct. Stab. Dyn. 12(3) (2012) 1250011.
20. J. Cai and J. Feng, E®ect of support sti®ness on stability of shallow arches, Int. J. Struct.Stab. Dyn. 10(5) (2010) 1099�1110.
21. M. A. Bradford, In-plane nonlinear behavior of circular pinned arches with elasticrestraints under thermal loading, Int. J. Struct. Stab. Dyn. 6(2) (2006) 163�177.
22. J. S. Lo, M. L. Lee, D. Lee, C. A. Choi and Y. T. Kim, Development and application of alaterally driven electromagnetic microactuator, Appl. Phys. Lett. 81(3) (2002) 547�549.
23. J. Qui, J. H. Lang and A. H. Slocum, A curved-beam bistable mechanism, J. Micro-electromech. Syst. 13(2) (2004) 137�146.
24. Y. Zhang, Y. Wang, Z. Li, Y. Huang and D. Li, Snap-through and pull-in instabilities ofan arch-shaped beam under electrostatic loading, J. Microelectromech. Syst. 16(3) (2007)684�693.
25. J. Zhao, S. Zhou, B. Wang and X. Wang, Nonlinear microbeam model based on straingradient theory, Appl. Math. Model. 36(6) (2012) 2674�2686.
26. M. H. Kahrobaiyan, M. Asghari, M. Rahaeifard and M. T. Ahmadian, A nonlinear straingradient beam formulation, Int. J. Eng. Sci. 49(11) (2011) 1256�1267.
27. G. J. Simitses and D. H. Hodges, Fundamentals of Structural Stability (Elsevier, 2006).
Snap-through and Bifurcation of Nano-Arches on Elastic Foundation
1350022-21
Int.
J. S
tr. S
tab.
Dyn
. Dow
nloa
ded
from
ww
w.w
orld
scie
ntif
ic.c
omby
UN
IVE
RSI
TY
OF
HO
NG
KO
NG
LIB
RA
RIE
S -
AC
QU
ISIT
ION
S SE
RV
ICE
S D
EPA
RT
ME
NT
on
05/1
1/13
. For
per
sona
l use
onl
y.