smart kart steering project proposal - uah - engineeringhitedw/ee410/class 2/proposal presentation...
TRANSCRIPT

Smart Kart SteeringProject Proposal
EE 494 - 01 Senior DesignTson Chan, Andrew Hull, Brad Izbell,
Jordan Osier, Jacob Wegrzyn
September 13, 2013
Proposal Overview
Team introductions
Background Information
Design Problem
Objectives
Strategies
Plan of Action
Question & Answer Session

Meet the Team

Background
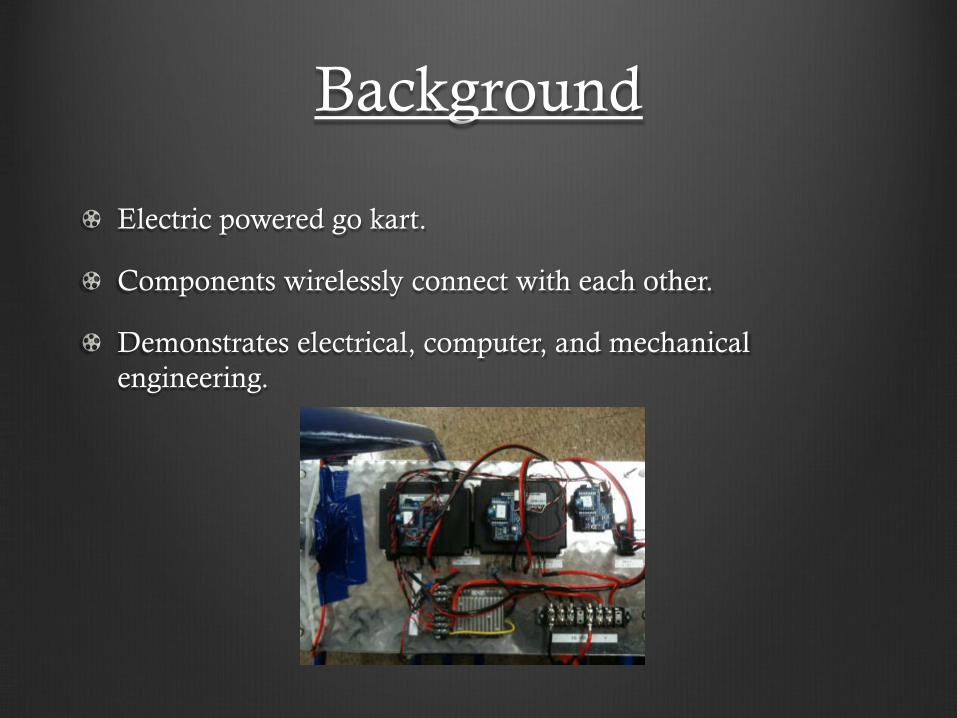
Background
Electric powered go kart.
Components wirelessly connect with each other.
Demonstrates electrical, computer, and mechanical engineering.

Background
The steering system is unreliable
The current steering mount was poorly attached to the frame
The Client expects the kart to have a reliable steering system while keeping the components of the system communicating wirelessly.
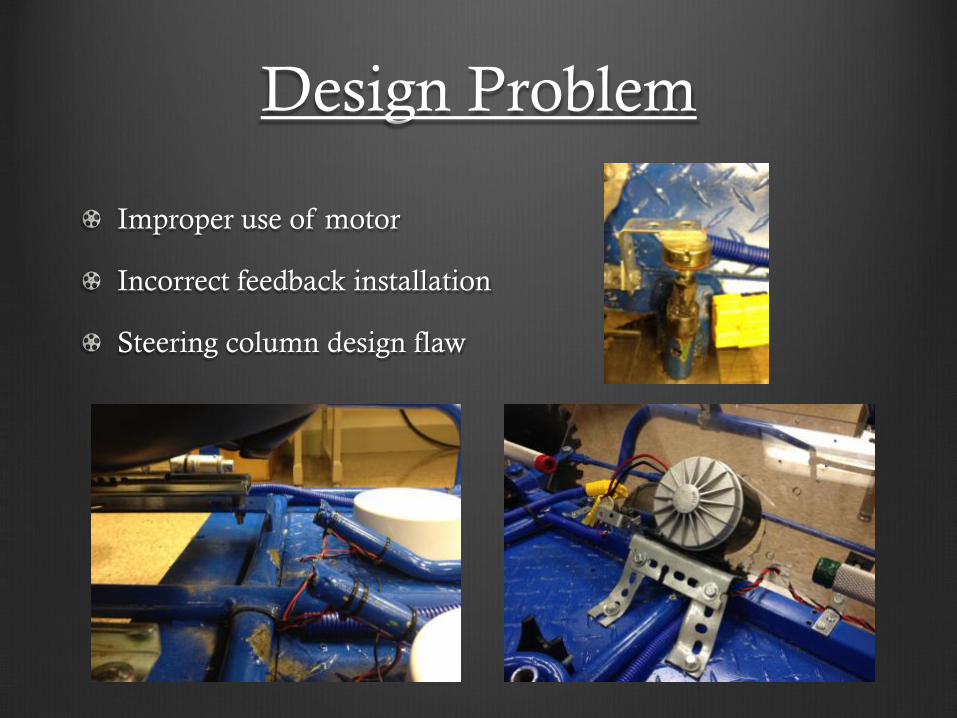
Design Problem
Improper use of motor
Incorrect feedback installation
Steering column design flaw
Objectives
Ensure a safe and operable steering system.
Reconstruct the steering column
Embrace the Synapse Wireless communication system.
Specifications
A rebuilt and adjustable steering column.
Steering wheel return to center.
Accurate steering
Wireless communication using Synapse Network Application Protocol.
Custom Python scripts used to command SNAP modules.
Single servomotor actuates the steering system.

Constraints
Budget
Safety
Power
Hardware/Software

Strategy I: Redesign the Steering System
Signal Converter and
Feedback Module
ServoMotor
Feedback
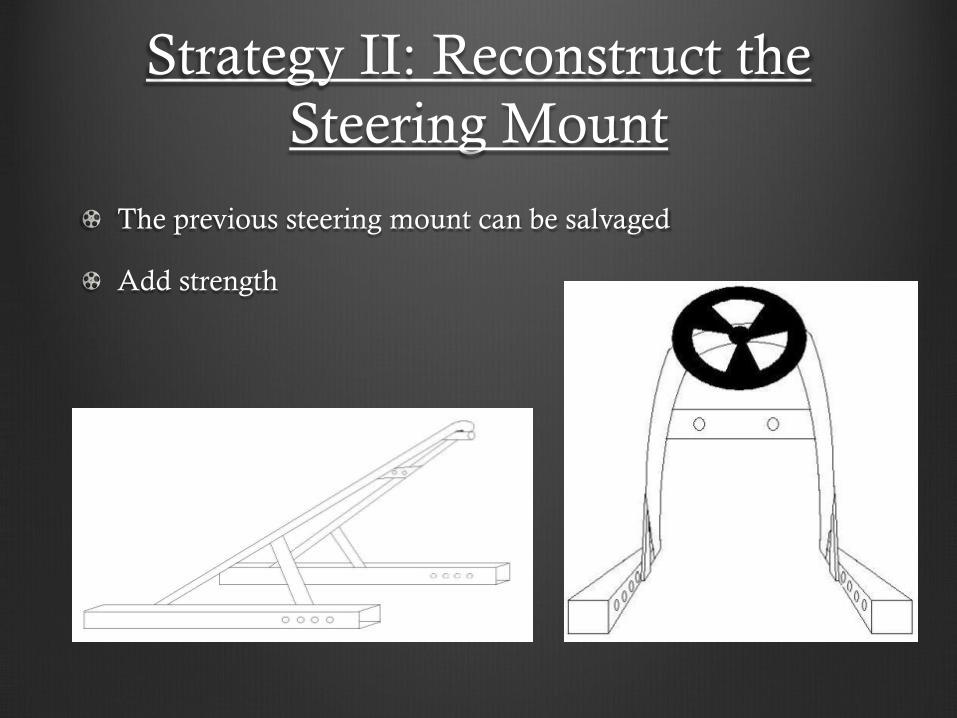
Strategy II: Reconstruct the Steering Mount
The previous steering mount can be salvaged
Add strength
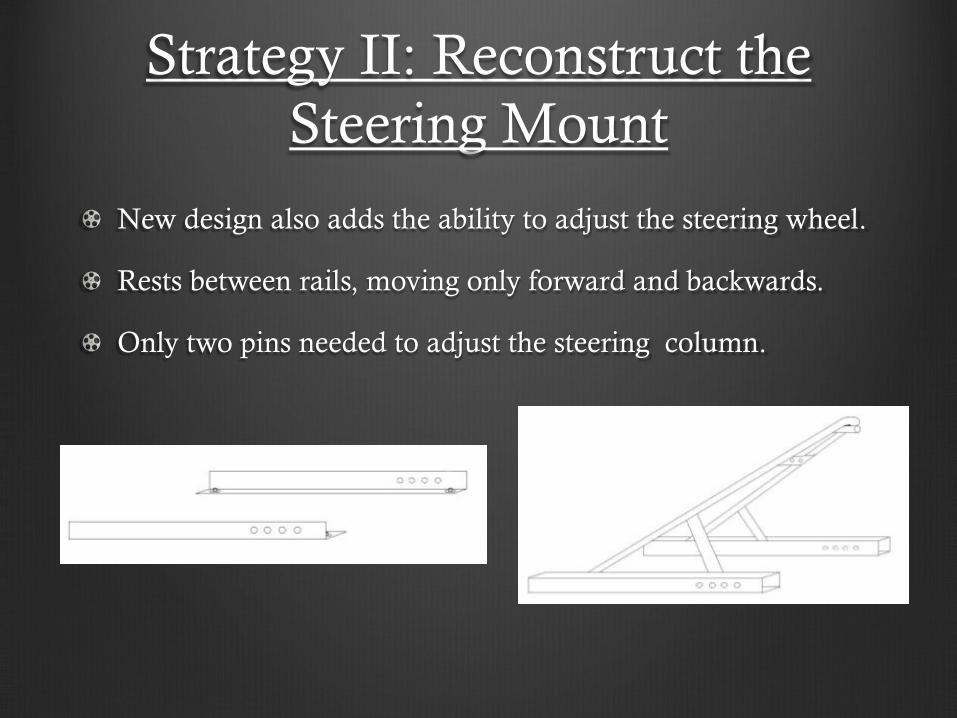
Strategy II: Reconstruct the Steering Mount
New design also adds the ability to adjust the steering wheel.
Rests between rails, moving only forward and backwards.
Only two pins needed to adjust the steering column.
Strategy III: Incorporating SNAP technology
Replace Arduino boards with SNAP wireless modules.
Make connections to input/output of modules.
Write custom Python scripts
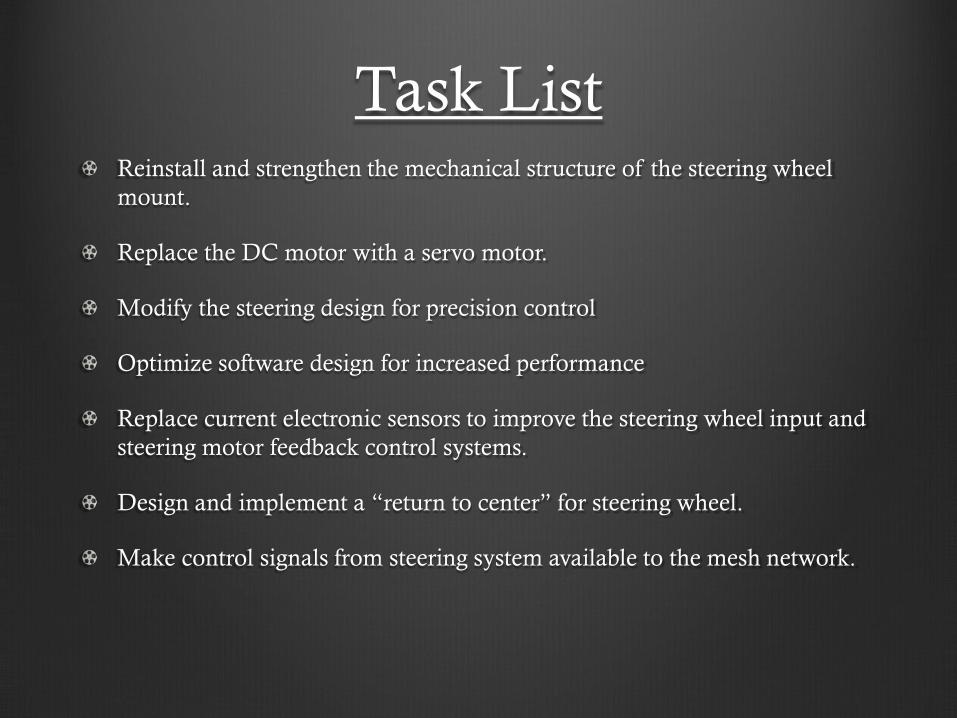
Task ListReinstall and strengthen the mechanical structure of the steering wheel mount.
Replace the DC motor with a servo motor.
Modify the steering design for precision control
Optimize software design for increased performance
Replace current electronic sensors to improve the steering wheel input and steering motor feedback control systems.
Design and implement a “return to center” for steering wheel.
Make control signals from steering system available to the mesh network.
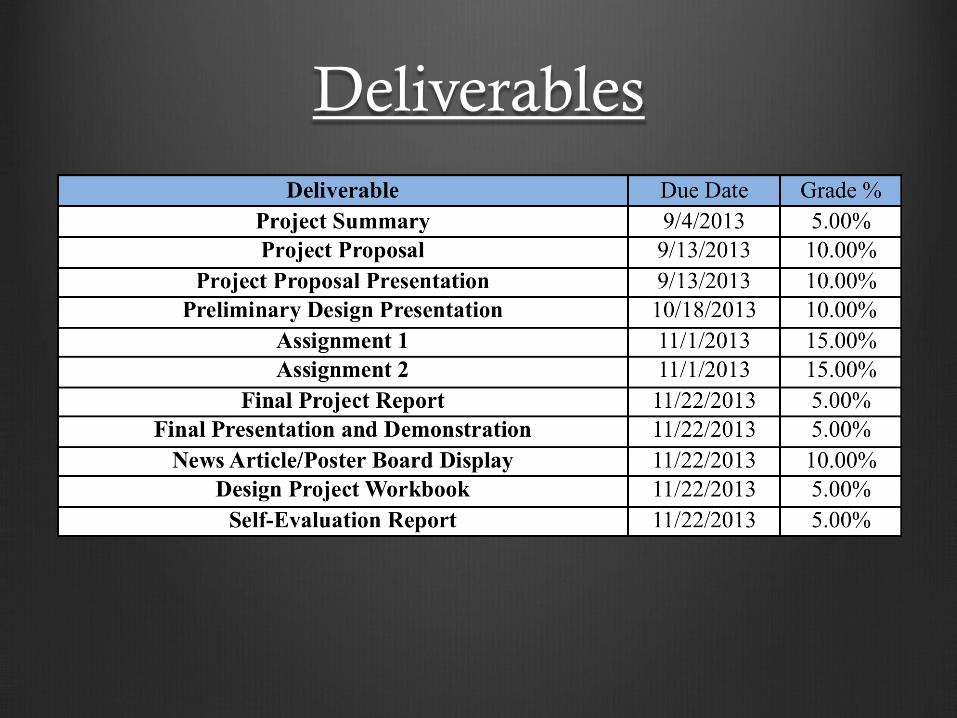
Deliverables

Project Schedule
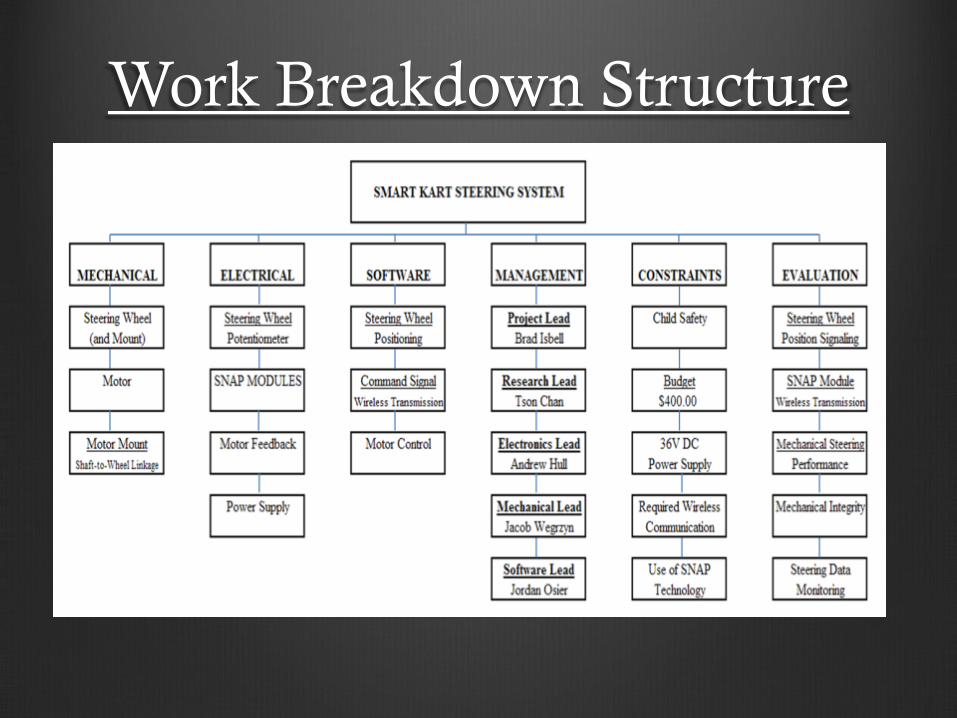
Work Breakdown Structure

Budget

Results
WEEKLY REPORTS
DOCUMENTATION
DELIVERABLES
TESTING AND DEMONSTRATION

Questions