sistem kontrol motor dc menggunakan logika fuzzy
TRANSCRIPT

PENELITIAN MANDIRI
RANCANG BANGUN SISTEM KENDALI MOTOR DC MENGGUNAKAN FUZZY LOGIC BERBASIS MIKROKONTROLER
Hendra KusdarwantoJurusan Fisika Unibraw – Universitas Brawijaya Malang
ABSTRAK
Aplikasi fuzzy logic hampir tak terbatas, misalnya kontrol proses, proses produksi, robotika, manajemen skala besar, teknik sipil, kimia ,transportasi, kedokteran, maupun ekonomi. Fuzzy logic controller adalah alternatif sistem kendali yang mudah karena tidak perlu dicari model matematisnya namun mempunyai kestabilan yang baik. Motor DC yang dipakai dihubungkan dengan sebuah rotary encoder yang telah dilengkapi dengan sebuah optocoupler untuk menghitung kecepatan putar. Fuzzy logic yang dirancang mempunyai 2 masukan (Error,∆Error) dan 1 keluaran (output). Membership function masukan mempunyai 5 label linguistik dengan 25 if-then rule. Signal penggerak motor memanfaatkan fitur PWM yang terdapat pada mikrokontroler ATMEGA 8535 sedangkan pulsa optocoupler pada encoder dihitung dengan memanfaatkan counter mikrokontroler ATMEGA 8535. Penghitungan kecepatan dilakukan dengan menghitung jumlah clock counter tiap 100 ms. Prosedur fuzzy logic yang digunakan meliputi proses fuzzyfikasi, evaluasi rule dan proses defuzzyfikasi dengan metode COA (Center Of Area). Sebagai user interfacenya digunakan komputer yang terhubung dengan mikrokntroler melalui port serial. Pengaturan set point, pemantauan respon sistem serta kestabilan dapat dilakukan dan dimonitoring lewat komputer dengan menggunakan software Delphi. Data diambil berdasarkan perubahan dari variasi set point. Respon sistem akan semakin cepat seiring berkurangnya kecepatan motor karena hubungan kecepatan dan nilai PWM tidak linier.
1. PENDAHULUAN
Semakin banyaknya kebutuhan sistem kontrol pada sistem elektronik seperti pada mesin cuci, AC, robot dll maka perlu dibuat suatu sistem kendali yang dapat diimplementasikan pada sebuah device yang kecil seperti mikrokontroler. Fuzzy logic adalah alternatif yang paling mungkin untuk di implementasikan pada mikrokontroler karena kesederhanaan algoritmanya mengingat memori mokrokontroler yang terbatas. Untuk contoh aplikasinya mencoba menerapkan fuzzy logic controller untuk pengendalian motor DC.
2. PERANCANGAN DAN PEMBUATAN ALAT 2.1 METODOLOGI
1. Studi literatur2. Perancangan dan Pembuatan hardware3. Pengujian PWM untuk mengetahui hubungan besar PWM dengan kecepatan
motor
1

4. Perancangan Fuzzyfikasi5. Perancangan Rule6. Pengujian akhir7. Analisa
2.2 PERANCANGAN DAN PEMBUATAN HARDWARE
2.3 PENGUJIAN PWM
051015202530354045
0 100 200 300
SINYAL PWM
CL
OC
K/1
00
ms
MOTOR DC
ENCODER
ATMEGA8535
PD7/OC2
PB1/T1
KOMPUTER
PD0/RXD
PD1/TXD
2

2.4 PERANCANGAN FUZZYFIKASI
Fungsi segitiga:
u = 0 untuk x<A
u = untuk A≤ x ≤ B
u = untuk B≤ x ≤ C
u = 0 untuk x > C
Fuzzyfikasi error dan delta_error adalah sebagai berikut :
A B C
1
3
-20 -10 -5 0 10 5 20
Z
PS
PB
NS
NB

2.5 PERANCANGAN RULE
Karakteristik kontrol:
Masukan fuzzy control yang dirancang adalah error dan ∆error, dengan definisi sebagai
berikut:
Error(t) = SP-PV(t)
SP = Set Point (Nilai yang diinginkan)
PV(t) = Present Value pada waktu=t (Nilai aktual)
∆Error(t) = Error(t)-Error(t-1)
Error(t) = Error pada waktu=t
Error(t-1) = Error pada waktu =t-1
Referensi error:
a = PB (Positive Big)
b,d,f,h = Z (Zero)
c = NB (Negative Big)
e = PS (Positive Small)
g = NS (Negative Small)
∆Error adalah besar perubahan error atau kecepatan sistem berubah, mempunyai nilai
negatif jika PV bergerak dari a menuju c dan akan mempunyai nilai positif jika bergerak
dari c menuju e sedangkan besarnya tergantung dari kemiringan fungsi PV seperti
gambar berikut:
4

Dari karakteristik kontrol diatas maka dapat dibuat rule sebagai berikut:
NB NS AZ PS PB
NB NB NB NB NS Z
NS NB NB NS Z PS
Z NS NS Z PS PS
PS NS Z PS PB PB
PB Z PS PB PB PB
2.6 PERANCANGAN DEFUZZYFIKASI
Defuzzyfikasi yang dipakai menggunakan metode COA (Center Of Area) dengan
fungsi singleton sebagai berikut:
NB NS PB PS
5
ERROR
DELTA
ERROR

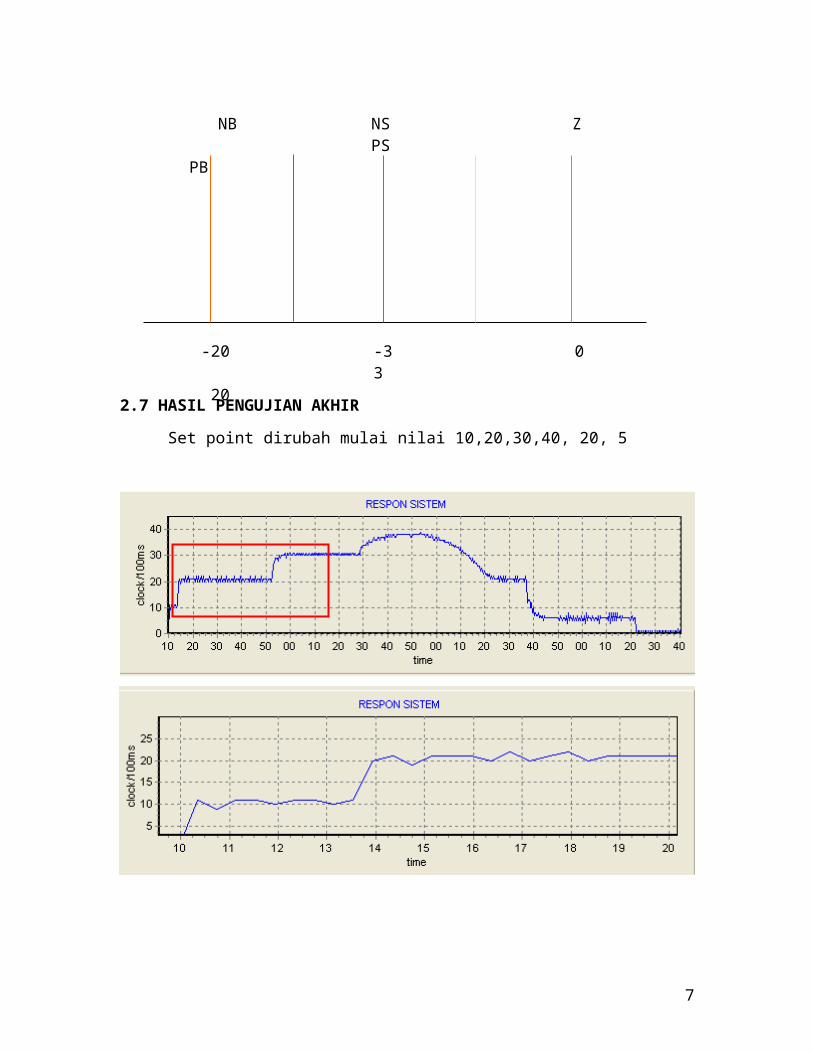
2.7 HASIL PENGUJIAN AKHIR
Set point dirubah mulai nilai 10,20,30,40, 20, 5
-20 -3 0 3 20
NB NS Z PS PB
6
ANALISA
Sistem mempunyai respon yang sangat cepat sekitar 0.5 detik ketika set point dirubah,
namun respon melambat seiring bertambahnya kecepatan, hal ini karena semakin tinggi
kecepatan, ketelitian PWM semakin berkurang maksudnya perubahan PWM yang besar
hanya akan mengakibatkan perubahan kecepatan yang kecil saja seperti yang ditunjukkan
pada grafik pengujian PWM dimana grafik akan semakin landai seiring bertambahnya
kecepatan, hal ini juga menyebabkan banyak terjadi overshoot pada kecepatan rendah
karena ketelitian PWM semakin besar seiring berkurangnya kecepatan motor. Percobaan
ini dilakukan tanpa memberi beban pada motor.
LAMPIRAN
GAMBAR ALAT
7

TAMPILAN USER INTERFACE
8