simulering och modellering av en resonansomvandlare till...
TRANSCRIPT

Simulering och modellering av en resonansomvandlare
till en induktionsvärmare
J I M M Y H O G B R I N K
Master's Degree ProjectStockholm, Sweden 2004
IR-RT-EX-0404
i
Abstract
This Master’s Thesis is an investigation of the possibilities to run an induction heaterwith a resonant converter. The deficiencies of the induction heater of today aredifficulties with EMC (Electro Magnetic Compatibility) and heavy power losses, whichmust be cooled down by a water cooling system. A resonant converter might be asolution of these problems and could thereby increase the efficiency.
The project started with a study of different resonant converter topologies in order tofind out a suitable converter. The choice ended up with a topology which is speciallydesigned to be used to induction heaters. A simulation model and a linearizedstate-space model was created, which are useful tools for designing and analysis of the resonant converter. The handle on the induction heater, where the magnetic fieldgenerates, was examined with a test system that was developed for the aim. Thisexamination led to a simplified model of the load. The test system was also used as atool in order to see if the resonant converter could work with and run the handle.
The result shows that the induction heater is very difficult to run with the chosenresonant converter. The cause of the problem is that the handle changes itscharacteristic, depending on the choice of the metal which is to be heated and theamount of the current which flows through the induction coil. Since the resonant circuit includes the handle the whole system is affected and this leads to a varying resonancefrequency. When iron was heated the damping factor increased so much that theresonance was affected and led to a very low efficiency.
Sammanfattning
I detta examensarbete undersöks möjligheterna att driva en befintlig induktionsvärmaremed en resonansomvandlare. De brister som produkten har idag är problem medEMC (Elektromagnetisk kompatibilitet) och stora förlusteffekter som måste kylas bort.En resonansomvandlare skulle kunna minska dessa problem och höja verkningsgraden.
Arbetet inleddes med en studie där olika typer av resonansomvandlare undersöktes.Denna undersökning ledde fram till en topologi som är utformad för att fungera bra vid drivning av induktionsvärmare. En simuleringsmodell och en linjäriseradtillståndsmodell av resonansomvandlaren togs fram för att kunna användas vid designoch analys av omvandlaren. En förenklad modell av handtaget på induktionsvärmaren,där magnetfältet genereras, togs fram med hjälp av ett testsystem som utvecklades.Testsystemet användes också för att provköra resonansomvandlaren tillsammans medhandtaget.
Resultatet visar på stora problem att driva induktionsvärmaren med den topologi avresonansomvandlare som analyserats. Orsaken är att handtaget ändrar sin karaktäristikberoende på vilken metall som ska värmas och strömmen genom induktionsspolen.Eftersom handtaget ingår i resonanskretsen påverkas därmed hela systemet och medfören varierande resonansfrekvens. Vid uppvärmning av järn blir också dämpningen ihandtaget så stor att resonansen påverkas och verkningsgraden blir väldigt låg.

ii

iii
Innehållsförteckning
1. INLEDNING............................................................................................................................................1
1.1 BAKGRUND ........................................................................................................................................11.2 PROBLEMBESKRIVNING .....................................................................................................................11.3 METOD...............................................................................................................................................21.4 AVGRÄNSNINGAR ..............................................................................................................................21.5 RAPPORTENS STRUKTUR ..................................................................................................................21.6 ESKILSTUNA ELEKTRONIKPARTNER AB............................................................................................2
2. INDUKTIONSVÄRMARE.....................................................................................................................3
2.1 ALLMÄNT............................................................................................................................................32.2 UPPBYGGNADEN HOS CH33.............................................................................................................4
3. RESONANSOMVANDLARE...............................................................................................................7
3.1 GRUNDPRINCIPEN .............................................................................................................................73.2 SWITCHKOMPONENTER...................................................................................................................11
3.2.1 BJT .........................................................................................................................................113.2.2 MOSFET ................................................................................................................................113.2.3 IGBT .......................................................................................................................................12
3.3 HEL- ELLER HALVBRYGGA ...............................................................................................................133.4 OLIKA TOPOLOGIER PÅ RESONANSKRETSEN ..................................................................................14
3.4.1 SRC (Series Resonant Converter) ....................................................................................143.4.2 PRC (Parallel Resonant Converter) ..................................................................................163.4.3 LLC .........................................................................................................................................17
3.5 VAL AV RESONANSOMVANDLARE ....................................................................................................20
4. MODELLERING AV HANDTAGET..................................................................................................21
4.1 IDENTIFIERING AV R OCH L .............................................................................................................224.2 BERÄKNING AV STRÖMMEN .............................................................................................................25
5. SIMULERING OCH MODELLERING AV LLC...............................................................................27
5.1 BESKRIVANDE FUNKTION.................................................................................................................275.2 ANVÄNDNING AV BESKRIVANDE FUNKTION .....................................................................................285.3 SIMULERING MED PSPICE .............................................................................................................295.4 TILLSTÅNDSMODELL ........................................................................................................................335.5 SAMMANFATTNING ..........................................................................................................................37
6. UTVECKLING AV TESTSYSTEM....................................................................................................39
6.1 STYRNING AV TESTSYSTEMET.........................................................................................................396.2 UTVECKLINGSKORT .........................................................................................................................406.3 BESKRIVNING AV KRETSEN..............................................................................................................41
6.3.1 Mikrokontrollern ....................................................................................................................416.3.2 Uppbyggnad av logiken .......................................................................................................42
6.4 BESKRIVNING AV PROTOTYPKORTET ..............................................................................................456.4.1 Optokopplare.........................................................................................................................456.4.2 Drivkrets .................................................................................................................................456.4.3 Halvbrygga ............................................................................................................................46

iv
7. RESULTAT AV EXPERIMENT OCH SIMULERINGAR ...............................................................47
7.1 MÄTNING PÅ HANDTAGET................................................................................................................477.2 DIMENSIONERING AV LLC ...............................................................................................................497.3 TESTKÖRNING .................................................................................................................................517.4 RESULTAT FRÅN SIMULERING I PSPICE ........................................................................................527.5 RESULTAT FRÅN SIMULERING I MATLAB .........................................................................................547.6 SAMMANFATTNING ..........................................................................................................................56
8. SLUTSATSER .....................................................................................................................................57
9. REFERENSER ....................................................................................................................................59
10. BILAGOR ...........................................................................................................................................61
10.1 DESIGN AV LLC.............................................................................................................................6110.2 IDENTIFIERING AV R OCH L ...........................................................................................................6210.3 BERÄKNING AV IRMS .....................................................................................................................6310.4 SIMULERING I PSPICE .................................................................................................................6410.5 BERÄKNING AV TILLSTÅNDSMODELL .............................................................................................6710.6 SCHEMA PÅ PROTOTYPKORTET ....................................................................................................68

- 1 -
1. Inledning
1.1 BakgrundDet här examensarbetet har utförts hos Eskilstuna Elektronikpartner AB. Där tillverkasen induktionsvärmare som kallas för CH33 och som företaget varit med och utvecklat åtCar-O-Liner AB i Kungsör. Induktionsvärmarens användningsområde är framför alltvid reparationer av fordon, där den bl.a. kan användas för att värma upp metalldelar på deformerade karosser innan de ska riktas upp. Ett annat användningsområde ärfastrostade bultar, som går att få loss genom uppvärmning. Fördelen med att använda en induktionsvärmare istället för en gassvets är många, exempelvis:
• Ingen öppen låga behövs.• Inga närliggande värmekänsliga detaljer skadas.• Produkten kan värma genom gummi och plast.
Bristerna med dagens konstruktion är att den har låg verkningsgrad och genererarmycket störningar vilket leder till problem vid godkännande av EMC (Elektromagnetiskkompatibilitet). Anledningen till dessa problem ligger delvis i den metod som användsför att omvandla nätspänningen till den högfrekventa växelspänning som driverinduktionstransformatorn i handtaget. Växelspänningen framställs genom att switcha en likspänning med önskad frekvens och skapar därmed en fyrkantsvåg. Om till- ochfrånslag sker oberoende av strömmen och spänningen vid switchen, kan detta leda tillmycket stora switchförluster. Metoden kallas för ”hård switchning” och fungerar bra vidlåga effekter, men om mycket energi skall överföras vid en relativt hög frekvens blirförlusterna mer framträdande.
Verkningsgraden hos CH33 ligger på maximalt 50%, där de stora värmeförlusternamåste transporteras bort med hjälp av effektiv vattenkylning. Om induktionsvärmarenanvänds i varmare länder måste dessutom kylsystemet byggas ut med en extra kylaremed fläkt för att få bort förlusteffekterna.
Ett sätt att förbättra konstruktionen skulle kunna vara att omvandla likspänningen tillväxelspänning (DC/AC-omvandlare) via en resonansomvandlare. Fördelen är då attswitchningen sker när strömmen eller spänningen är noll, vilket minskarswitchförlusterna. Dessutom fungerar resonanskretsen som ett bandpassfilter, där allaövertoner i den switchade fyrkantsvågen dämpas effektivt och kvar blir grundtonen som är sinusformig. Alltså skulle en resonansomvandlare kunna minska mycket av deproblem som produkten lider av idag.
1.2 ProblembeskrivningMålet med det här examensarbetet är att undersöka om det går att drivainduktionsvärmaren med en resonansomvandlare. Det ska göras genom att förstundersöka vilka olika typer av resonansomvandlare som finns och utifrån dessa kommafram till en som kan passa för ändamålet. Omvandlaren ska modelleras och simulerasför att fastställa vilken typ av reglering som krävs för att få en stabil drift.
Resonansomvandlarens last är induktionstransformatorn som sitter i handtaget påinduktionsvärmaren. För att få med handtaget i simuleringarna måste en förenkladmodell av den tas fram. Eftersom produkten användas både för uppvärmning av järn och aluminium samt att handtaget kan vara i luft, måste tre olika modeller tas fram.Energiöverföringen till metallen är beroende av strömmen som alstrar magnetfältet,därför måste modellen även innefatta strömberoendet.
Ett litet testsystem ska utformas för att kunna utföra praktiska tester som visar omresonansomvandlaren kan driva handtaget. Fungerar detta bra kan mätdata jämförasmed resultaten från simuleringarna.

- 2 -
1.3 MetodStudien av olika typer av resonansomvandlare ledde fram till en topologi som kallas för LLC [7] och är speciellt utformad för att driva induktionsvärmare på ett effektivt sätt.En speciell designalgoritm måste följas för att få fram rätt komponentvärden ochdärmed få en bra verkningsgrad.
En förenklad modell av induktionstransformatorn i handtaget består av en induktansmed en serieresistans. För att identifiera värdet på dessa två utförs stegsvar där olikaströmmar testas genom att ändra storleken på stegspänningen. Eftersominduktionsvärmaren används för uppvärmning av både järn och aluminium undersökshandtaget mot dessa metaller och därtill även i luft.
För att modellera och simulera resonansomvandlaren används två olikasimuleringsprogram, ett kretssimuleringsprogram och ett datorprogram där systemetbeskrivs matematisk. Eftersom resonansomvandlaren har en switchad likspänning sominsignal är systemet olinjärt. För att lättare kunna beskriva olinjära signaler används ettmatematiskt verktyg som kallas för beskrivande funktion.
Ett litet testsystem utvecklades för att kunna utföra olika stegsvar på handtaget och även för att testköra resonansomvandlaren.
1.4 AvgränsningarExamensarbetet har avgränsats till att utgå från det befintliga handtag sominduktionsvärmaren har idag och utifrån det undersöka om en resonansomvandlare kanförbättra verkningsgraden.
Testsystemet har endast till syfte att utföra lite enklare tester och behöver inte innefattade val av komponenter som skulle krävas för att klara den verkliga effekten.
1.5 Rapportens strukturRapporten inleds i kapitel två med grundläggande teori om induktionsvärmare. I kapitel tre presenteras de vanligaste förekommande resonansomvandlarna och hur dessafungerar. I kapitel fyra görs en matematisk beskrivning av identifieringen av ett stegsvar från en resonanskrets. En simuleringsmodell och en linjäriserad tillståndsmodell avresonansomvandlaren tas fram i kapitel fem. I kapitel sex beskrivs testsystemet somanvänds vid undersökningen av handtaget och vid provkörningen av omvandlaren. Allaresultat från de undersökningar och analyser som genomförts tas upp i kapitel sju ochrapporten avslutas med slutsatser och förslag till vidare arbete i kapitel åtta.
1.6 Eskilstuna Elektronikpartner ABEskilstuna Elektronikproduktion AB bildades under privatregi år 1991. Nio år senareförnyades företagets profilering och ändrade i samband med detta namnet till Eskilstuna Elektronikpartner AB. Affärsidén är produktutveckling och/eller produktion avelektronikprodukter. Största delen av kunderna finns inom områden somfordonselektronik, säkerhetselektronik och industrielektronik. Idag har företaget drygt20 anställda, varav sex personer arbetar med utveckling och produktionsanpassning. För att klara hela processen från idé till färdig produkt krävs kunskaper inom analog ochdigital hårdvarukonstruktion, mönsterkortslayout och mjukvara. För att kunna verifieragällande EMC-krav på produkterna har företaget tillgång till ett EMC-labb. Exempel på egna produkter som tagits fram är linjeförstärkare för Echelon nät och beröringsfriersättare för kvicksilverbrytare.

- 3 -
2. Induktionsvärmare
Redan år 1820 upptäcktes att en elektrisk ström kan skapa ett magnetfält och 1831visade Michael Faraday det omvända, nämligen att det även går att skapa en elektriskström med hjälp av ett magnetfält. Uppfinningar som har utvecklats tack vare dennaupptäckt är många t.ex. generatorn, transformatorn och även möjligheten attkommunicera trådlöst. Men ett problem som åstadkom huvudbry vid den tiden, var attinduktionen alstrade stora värmeförluster i metallerna. Man upptäckte då att när ettmagnetfält passerar genom metall uppstår strömmar i metallen som strävar efter attskapa ett motverkande magnetfält. Dessa strömmar fick namnet Eddy-strömmar ochorsakar värmeförluster i metallen p.g.a. resistiviteten. Denna upptäckt ledde till idén attkunna utnyttja värmeförlusterna till nyttig värme och induktionsvärmaren var född.
2.1 AllmäntEn induktionsvärmare är i grunden en ganska enkel konstruktion, det enda som krävs är en växelspänningskälla (VAC), en induktionsspole och en arbetsbit av ledande metallsom ska värmas upp. Spänningskällan driver en växelström genom induktionsspolensom alstrar ett växlande magnetfält. När arbetsbiten placeras nära magnetfältet uppstårdet strömmar i metallen som leder till uppvärmning. Frekvensen på magnetfältet är enviktig faktor som avgör vart i metallen som värmen uppstår. Vid frekvenser på5-30 kHz uppstår Eddy-strömmarna ganska långt in i metallen. Höjs frekvensen till100-400 kHz är det mest ytan som värms upp och detta kan t.ex. utnyttjas vidythärdning av vissa metallkonstruktioner. Strömdensiteten är alltså störst på ytan avmetallen och avtar sedan exponentiellt med avståndet enligt [1]:
/0
xxi i e δ−= (2.1)
där i0 är strömdensiteten vid ytan och ix är strömdensiteten vid avståndet x från ytan.δ är en konstant som bestäms av:
f
ρδ
πµ= (2.2)
där ρ och µ är resistiviteten respektive permeabiliteten i materialet och f är frekvensenpå magnetfältet.
Fenomenet att induktionsströmmarna kryper allt närmare ytan på metallen vid allt högre frekvenser, kallas för skineffekt och δ är beteckningen för skindjupet där största delenav värmen alstras. Den relativa förändring av skindjupet som uppstår vid en ändring avfrekvensen f0 till f1, kan beskrivas som:
1
0
1f
fδ∆ = − (2.3)
Arbetsfrekvensen hos CH33 ligger runt 25 kHz och är således till för uppvärmning avtjockare material. Vid en sänkning av frekvensen till 15 kHz skulle det innebära attvärmen alstrades 30% djupare in i metallen. Om frekvensen istället höjdes till 35 kHz,skulle det innebära en minskning av djupet med 15%.

- 4 -
En annan viktig faktor som är avgörande för hur effektivt en metall kan värmas uppgenom induktion är metallens resistivitet. Vanligt järn har relativt hög elektriskresistivitet. Där bromsas de inducerade strömmarna upp effektivare än i t.ex.aluminium, som har mycket lägre resistivitet. Resultatet blir att det är lättare att värmaupp järn än aluminium med en induktionsvärmare. I ekvation 2.2 kan man se attskindjupet ökar då resistiviteten ökar.
Metaller som är magnetiska värms upp effektivare än icke-magnetiska metaller ochanledningen är hysteresförlusten som leder till värme. Den uppkommer p.g.a. att detfinns en viss tröghet i att byta riktning på magnetiseringen i metallen. Denna tröghet kan liknas vid friktionskraften i mekaniska system som ger upphov till friktionsförluster.Den magnetiska permeabiliteten är ett mått på hur magnetiskt en metall är och i mjuktjärn kan denna variera mellan 250-700 [2]. Om man höjer temperaturen leder detta tillatt permeabiliteten minskar för att vid den s.k. curietemperaturen få värdet 1, vilketinnebär helt omagnetiskt. För mjukt järn ligger den temperaturen på 770°C [3]. Iekvation 2.2 kan man se att skindjupet minskar då permeabiliteten ökar.
2.2 Uppbyggnaden hos CH33Induktionsvärmaren är uppbyggd med en kraftdel som sitter monterad på en rullvagn för att lätt kunna förflyttas. Från vagnen går det en tre meter lång slang till handtaget sominnehåller en transformator där sekundärsidan alstrar magnetfältet. På vagnen finnsockså en vattentank för kylning av både kraftdelen och handtaget. Hela enheten drivs avnätspänning (enfas 208-240V, 50-60Hz) och förbrukar som mest 16A.
Kraftdelens funktion är att omvandla nätspänningen från en frekvens på 50-60Hz, till en växelspänning med en frekvens på omkring 25 kHz. Detta sker först genom attnätspänningen omvandlas till 375V likspänning och switchas sedan med rätt frekvens ut till primärlindningen i handtaget. För att förhindra att transformatorn blir mättad avlikspänningen används en seriekondensator C, se figur 2.1. Transformatornssekundärsida sitter i spetsen på handtaget, se figur 2.2, och består av en kortslutning för att skapa en så hög ström som möjligt. Runt denna höga kortslutningsström skapas ettkraftigt magnetfält som kan inducera strömmar i metaller som placeras framför spetsen.
C
Handtaget
VAC
i2
i1
Kraftdelen
N2=1
N1=20
L
B
Figur 2.1 Schema på handtaget och anslutningen till kraftdelen.
Figur 2.2 Spetsen på handtaget som består av en kortsluten sekundärsida på en transformator.

- 5 -
För att få ett tillräckligt kraftigt magnetfält vid kortslutningen på sekundärsidan krävs enström på ca 800A. Omsättningen i transformatorn är 20:1, vilket medför att det behövsen ström på 40A på primärsidan som ska switchas från likspänningen på 375V.
Teorin bakom induktionsspolen ligger helt utanför detta arbete, men för att kunnaanalysera andra drivsteg krävs ändå någon enkel modell av lasten. Den enklastemodellen av handtaget är en spole L med en serieresistans R. Värdet på dessa måsteidentifieras och här uppstår ett problem. För att få med växelverkan mellan metallen imagnetfältet och handtag måste mätningen göras när det går mycket ström genom densenare. Detta löses enklast genom att använda stegsvarsanalys där stora strömmar kanerhållas genom att öka stegspänningen. Detta beskrivs i kapitel 4. Modellering avhandtaget.
Det enklaste sättet att konstruera en DC/AC-omvandlare är att switcha en likspänningtill en fyrkantsvåg med önskad frekvens. Fördelen med den här metoden är att den ärenkel att konstruera, nackdelen är att utsignalen innehåller mycket övertoner ochverkningsgraden blir snabbt försämrad om frekvensen höjs. Kraftdelen på CH33 ärkonstruerad enligt den här principen och med strömmar på upp till 40A och spänningarpå 375V produceras stora effektförluster. Det skapas också mycket övertoner somgenererar elektromagnetisk strålning som ligger över de EMC-normer som måsteuppfyllas. Den här metoden kallas för ”hård switchning” och innebär att till- ochfrånslag sker helt oberoende av de strömmar och spänningar som finns. För att kunnabestämma ett approximativt värde på effektförlusten över switchen, kan följandesamband användas [1]:
( )1
2sw sw sw s on offP V I f t t= + (2.4)
där Vsw och Isw är spänningen respektive strömmen som switchas. Switchfrekvensen gesav fs och ton och toff är till- respektive frånslagstider hos switchen.
I ekvation 2.4 ser man att förlusteffekten är proportionell mot frekvensen, vilketresulterar i att det inte går att höja frekvensen utan att verkningsgraden blir sämre. Om både spänning och ström är stora vid till- och frånslag kan effektförlusterna bli väldigtstora och detta är en av CH33:s brister. Enda sättet att kunna förbättra verkningsgradenoch samtidigt kunna använda höga spänningar och strömmar är att utnyttja enresonansomvandlare. Där sker till- och frånslag av switchen då strömmen ellerspänningen är noll, vilket kallas för ”mjuk switchning”. Ekvation 2.4 visar att om tonoch toff är lika stora och tillslag sker då Vsw = 0 skulle detta resultera i en halvering avförlusteffekten Psw. Detta visar hur en resonansomvandlare kan öka verkningsgradenhos en DC/AC-omvandlare.

- 6 -

- 7 -
3. Resonansomvandlare
3.1 GrundprincipenEn resonansomvandlare minskar switchförlusterna genom att utnyttja de svängningarsom uppstår i en resonanskrets. Switcharna öppnas och stängs när spänningen ellerströmmen är väldigt nära noll. Detta kan liknas vid att knuffa på en gunga, omtidpunkten för energitillförsel är då gungan byter riktning överförs energin väldigt mjukt och enkelt.
De grundkomponenter som krävs för att bygga upp en resonansomvandlare är enlikspänningskälla, två eller fyra switchar med antiparallella dioder och en resonanskrets där också lasten ingår. Dessa komponenter kan konfigureras på många olika sätt medbåde för- och nackdelar, men alla fungerar på liknande sätt.
I figur 3.1 visas en resonansomvandlare med fyra switchar (H-brygga) och med enkondensator och en induktans i mitten. Lasten RL ligger i serie med L och C ochkopplingen kallas därför för SRC (Series Resonant Converter).
S1 D1
S2 D2 S4 D4
S3 D3
R LCLVdc
vc
iL
GND
Figur 3.1 Förenklat schema på en resonansomvandlare av typen SRC (Series-Resonant Converter).

- 8 -
En resonansomvandlare har tre olika arbetsområden där switchfrekvensen fs kan ligga
1. fs < f0 / 2 (Under halva resonansfrekvensen)2. f0 / 2 < fs < f0 (Mellan halva och upp till resonansfrekvensen)3. fs > f0 (Över resonansfrekvensen)
Vid område 1 och 2 ligger frekvensen under resonansfrekvensen och där används enprincip som kallas för ZCS (Zero Current Switch), som utnyttjar att strömmen är nollvid frånslag av switcharna. I område 3 ligger frekvensen över resonansfrekvensen ochdär används en annan princip som kallas för ZVS (Zero Voltage Switch), som utnyttjaratt spänningen är noll vid tillslag av switcharna. Tabellerna 3.1 - 3.3 visarfunktionsprincipen för resonansomvandlaren i figur 3.1 vid de tre olika arbetsområdena. Detta beskrivs med hjälp av hur strömmen iL varierar i kretsen under enswitchningsperiod. Om strömmen exempelvis går genom switcharna S1 & S4 i positivriktning genom lasten RCL, beskrivs det genom ”iL: Vdc S1 RCL S4 GND”.Switcharna S1-S4 arbetar alltid parvis med antingen S1&S4 eller S2&S3 tillslagnasamtidigt.
Tabell 3.1 beskriver funktionsprincipen då frekvensen ligger under halvaresonansfrekvensen, där ZCS används. Här hinner strömmen iL byta riktning för attslutligen upphöra helt under första halvan av en switchningsperiod. Under andra halvan upprepas förloppet men med negativa värden på strömmarna och spänningarna.
Tabell 3.1 Funktionsprincip hos SRC vid arbetsområde 1.
Funktionsprincip då fs < f0 / 2 S1 S2 S3 S4
1.
iL: Vdc S1 RCL S4 GNDS1 & S4 slås till och den positiva strömmen börjar att ladda upp kondensatorn till en spänning som till slut blir större än Vdc. Detta medför att strömmen iL börjar att avtaför att slutligen byta riktning och bli negativ.
TILL FRÅN FRÅN TILL
2.
iL: GND D4 RCL D1 VdcDå strömmen blir negativ måste den gå via de antiparallella dioderna D1 & D4. Då kan S1 & S4 slås ”FRÅN” enligtprincipen för ZCS.
FRÅN FRÅN FRÅN FRÅN
3.iL: INGEN STRÖMEftersom S1 & S4 nu är ”FRÅN” kan inte strömmen bytariktning igen och bli positiv, utan den upphör.
FRÅN FRÅN FRÅN FRÅN
4.
iL: Vdc S3 RCL S2 GNDS2 & S3 slås till och den negativa strömmen börjar att ladda upp kondensatorn till en negativ spänning som tillslut blir lägre än -Vdc. Detta medför att strömmen iL börjar att avta för att slutligen byta riktning och bli positiv.
FRÅN TILL TILL FRÅN
5.
iL: GND D2 RCL D3 VdcDå strömmen blir positiv måste den gå via de antiparallella dioderna D2 & D3. Då kan S2 & S3 slås ”FRÅN” enligtprincipen för ZCS.
FRÅN FRÅN FRÅN FRÅN
6.
iL: INGEN STRÖMEftersom S2 & S3 nu är ”FRÅN” kan inte strömmen vändariktning igen och bli negativ, utan den avtar och stannar på noll.
FRÅN FRÅN FRÅN FRÅN

- 9 -
Tabell 3.2 beskriver funktionsprincipen då frekvensen ligger mellan halva och upp tillresonansfrekvensen, där ZCS används. Även här hinner strömmen iL byta riktning, men switchningen byter polaritet då strömmen fortfarande ökar i den motsatta riktningen.Det här ger en mer kontinuerlig strömkurva än den som uppstår när switchfrekvensenligger under halva resonansfrekvensen.
Tabell 3.2 Funktionsprincip hos SRC vid arbetsområde 2.
Funktionsprincip då f0 / 2 < fs < f0 S1 S2 S3 S4
1.
iL: Vdc S1 RCL S4 GNDS1 & S4 slås till och den positiva strömmen börjar att ladda upp kondensatorn till en spänning som till slut blir större än Vdc. Detta medför att strömmen iL börjar att avtaför att slutligen byta riktning och bli negativ.
TILL FRÅN FRÅN TILL
2.
iL: GND D4 RCL D1 VdcDå strömmen blir negativ måste den gå via de antiparallella dioderna D1 & D4. Nu kan S1 & S4 slås ”FRÅN” enligtprincipen för ZCS.
FRÅN FRÅN FRÅN FRÅN
3.
iL: Vdc S3 RCL S2 GNDDirekt efter att S1 & S4 är ”FRÅN” slås S2 & S3 ”TILL” och den negativa strömmen ökar och börjar att ladda upp kondensatorn till en negativ spänning som till slut blir lägreän -Vdc. Detta medför att strömmen iL börjar att avtaför att slutligen byta riktning och bli positiv.
FRÅN TILL TILL FRÅN
4.
iL: GND D2 RCL D3 VdcDå strömmen blir positiv måste den gå via de antiparallella dioderna D2 & D3. Nu kan S2 & S3 slås ”FRÅN” enligtprincipen för ZCS.
FRÅN FRÅN FRÅN FRÅN
- 10 -
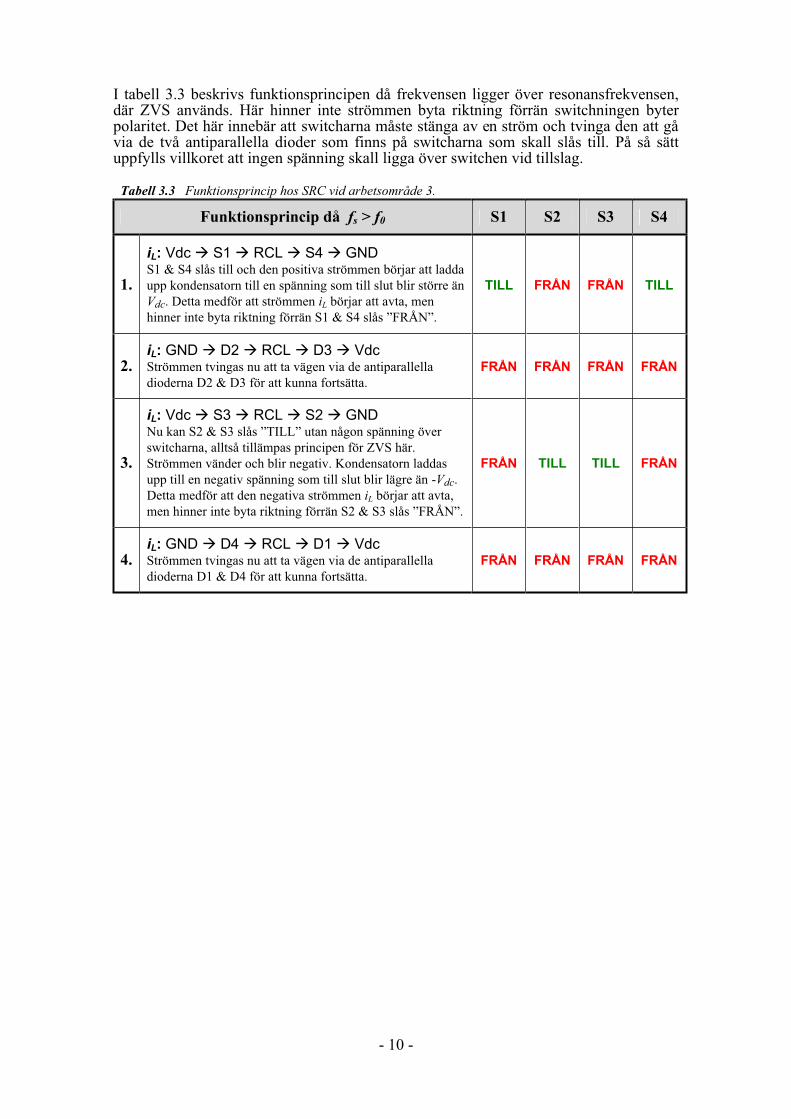
I tabell 3.3 beskrivs funktionsprincipen då frekvensen ligger över resonansfrekvensen,där ZVS används. Här hinner inte strömmen byta riktning förrän switchningen byterpolaritet. Det här innebär att switcharna måste stänga av en ström och tvinga den att gå via de två antiparallella dioder som finns på switcharna som skall slås till. På så sättuppfylls villkoret att ingen spänning skall ligga över switchen vid tillslag.
Tabell 3.3 Funktionsprincip hos SRC vid arbetsområde 3.
Funktionsprincip då fs > f0 S1 S2 S3 S4
1.
iL: Vdc S1 RCL S4 GNDS1 & S4 slås till och den positiva strömmen börjar att ladda upp kondensatorn till en spänning som till slut blir större än Vdc. Detta medför att strömmen iL börjar att avta, menhinner inte byta riktning förrän S1 & S4 slås ”FRÅN”.
TILL FRÅN FRÅN TILL
2.iL: GND D2 RCL D3 VdcStrömmen tvingas nu att ta vägen via de antiparallella dioderna D2 & D3 för att kunna fortsätta.
FRÅN FRÅN FRÅN FRÅN
3.
iL: Vdc S3 RCL S2 GNDNu kan S2 & S3 slås ”TILL” utan någon spänning över switcharna, alltså tillämpas principen för ZVS här. Strömmen vänder och blir negativ. Kondensatorn laddasupp till en negativ spänning som till slut blir lägre än -Vdc.Detta medför att den negativa strömmen iL börjar att avta, men hinner inte byta riktning förrän S2 & S3 slås ”FRÅN”.
FRÅN TILL TILL FRÅN
4.iL: GND D4 RCL D1 VdcStrömmen tvingas nu att ta vägen via de antiparallella dioderna D1 & D4 för att kunna fortsätta.
FRÅN FRÅN FRÅN FRÅN

- 11 -
3.2 SwitchkomponenterI praktiken måste switcharna S1-S4 i figur 3.1 ersättas av någon typ av transistor. Detfinns tre vanliga typer av switchtransistorer som brukar användas; BJT, MOSFET ochIGBT, se figur 3.2. Då man talar om transistorer används ofta uttrycket ”öppentransistor”, vilket innebär att den leder ström och kan liknas med att en switch är TILL. På samma sätt kan en ”stängd transistor” liknas med en switch som är FRÅN.Informationen om switchkomponenterna kommer från [4] och [5].
C
B
EEmitter
Collector
Base
D
G
SSource
Drain
Gate
C
EEmitter
Collector
BJT MOSFET IGBT
GGate
Figur 3.2 De tre vanligaste switchtransistorerna.
3.2.1 BJTBeteckningen står för ”Bipolar Junction Transistor” och är en strömstyrd transistor somhar strömförstärkningen hFE. Det innebär att om strömmen I ska switchas krävsdrivströmmen I/hFE för att spänningsfallet över switchen ska bli tillräckligt litet. Omförstärkningsfaktorn är väldigt stor är detta inte något problem. Men vid tillverkning av BJT:er som ska tåla höga effekter blir strömförstärkningen ofta väldigt låg. Detresulterar i att det krävs höga drivströmmar som i sin tur leder till att transistorn tar lång tid att stänga av. Detta fenomen kallas för ”strömsvans” och under den tiden ökar ocksåspänningsfallet över transistorn, vilket leder till ökad effektförlust. För att göratransistorn snabbare vid avstängning kan en negativ ström användas som ”suger” ut deladdningar som håller transistorn öppen. Vid frekvenser över 10 kHz och vid storaeffekter är BJT ett dåligt val av switchtransistor.
3.2.2 MOSFETBeteckningen står för ”Metal Oxide Semiconductor Field Effect Transistor” och är enspänningsstyrd transistor. Den här typen av transistor är snabbare än BJT och lättare att driva, eftersom det är en spänning och inte en ström som styr transistorn. På ingångenfinns dock en kapacitans som måste laddas upp då transistorn ska öppna och laddas urnär den ska stängas av. Det här leder till att det krävs relativt stora, men kortvariga,strömmar för att få en MOSFET att bli snabb och därmed minimera switchförlusterna.
Då transistorn är öppen, kan den liknas vid en liten resistans RDS(ON) med en kondensator Cout parallellt över sig. Ett kvalitetsmått på en MOSFET är hur liten resistansen kangöras, eftersom det är detta värde som avgör hur stora effektförlusterna blir.Kapacitansen Cout har alltid samma spänning som den som ligger över transistorn, vilket leder till extra effektförluster om tillslag sker vid höga spänningar. Det som händer äratt kondensatorn kortsluts vid varje tillslag och laddningen förbrukas i RDS(ON). Därför är det en fördel att använda en MOSFET när tillslaget sker vid en så liten spänning sommöjligt, alltså vid ZVS.

- 12 -
3.2.3 IGBTBeteckningen står för ”Insulated-Gate Bipolar junction Transistor” och transistorn är en hybrid av BJT och MOSFET. Till största delen är den byggd som en BJT, eftersom detär lättare att använda den tekniken för att bygga effekttåliga transistorer. Men för att få transistorn spänningsstyrd används samma teknik som för MOSFET i drivsteget. Ettproblem som uppstår med hybriden är att det inte går att förhindra ”strömsvansen”eftersom det inte går att direkt kan komma åt drivströmmen. Därför är det en fördel attanvända en IGBT när frånslag sker vid en så liten ström som möjligt, alltså vid ZCS.
Induktionsvärmaren CH33 använder en IGBT-modul som innehåller både den övre och den undre transistorn i en halvbrygga. Modulen är framtagen av Mitsubishi och heterPM75DSA120. Den är godkänd för en ström på 75A och en spänning på 1200V.Fördelen med att använda en modul är att den innehåller mycket skyddskomponentersom annars måste vara externa komponenter. Bilderna i figur 3.3 är tagna fråndatabladet [6] och visar hur modulen är uppbyggd internt och hur den ser ut iverkligheten.
(a) (b)
Figur 3.3 (a) Intern uppbyggnad av IGBT-modulen PM75DSA120 som används i CH33.(b) Modulens verkliga storlek är 11 x 4,5 cm.

- 13 -
3.3 Hel- eller halvbryggaDet finns två olika bryggkopplingar som är vanligt förekommande vid drivning avresonansomvandlare. Den ena varianten innehåller endast två transistorer och kallas förhalvbrygga. Den andra innehåller fyra transistorer och kallas för helbrygga ellerH-brygga.
Halvbryggan fungerar så att den övre transistorn öppnar och lägger ut spänningen Vdctill resonanskretsen som är kopplad till jord i andra änden, se figur 3.4a. När polariteten ska bytas stänger den övre transistorn och den undre öppnar och drar ner spänningen till-Vdc. Normalt sett har man inte tillgång till både en positiv och en negativ spänning.Därför är det vanligt att man lägger andra sidan på resonanskretsen till halvalikspänningen istället för till jord, se figur 3.4b. För att detta ska fungera krävs enuppbalansering av halva likspänningen med hjälp av två kondensatorer. Värdet på dessa ska vara mycket större än den kapacitans som redan finns i resonanskretsen så att interesonansfrekvensen förändras. Nackdelen med konstruktionen är att endast halvalikspänningen används vid switchning.
H-Bryggan kräver fyra transistorer och använder hela likspänningen vid switchning, sefigur 3.4c. Transistorerna arbetar parvis, vilket innebär att när T1 & T4 är öppna liggeren positiv spänning över resonanskretsen. På samma sätt skapas en negativ spänning då T2 & T3 är öppna.
En viktig detalj på hur dessa bryggor ska styras, är att det alltid måste finnas en vissfördröjning mellan den övre och den undre transistorn när de ska växla tillstånd.Anledningen, som tidigare nämnts i kapitel 3.2 Switchkomponenter, är att transistorerna tar längre tid att stänga än att öppna. Utan en fördröjning får man en liten tid då bådatransistorerna är öppna, vilket betyder en ren kortslutning. Den här fördröjningen kallas på engelska för ”Dead Time” och måste p.g.a. ”strömsvansen” vara större vidanvändning av IGBT jämfört med för MOSFET.
I databladet [6] för den IGBT-modul, som används i CH33, ser man att den kräver en”Dead Time” på minst 3,5µs. Vilket kan jämföras med en MOSFET, som inte behöver mer än 0.5µs om den drivs på rätt sätt.
T1
T2
+Vdc
Resonanskrets
-Vdc
2
+Vdc
RC
RC
T1
T2
+Vdc
Resonanskrets Vdc
+Vdc
Resonanskrets
T1
T2
+Vdc
T3
T4
(a) (b) (c)
Figur 3.4 (a) En halvbrygga med både positiv och negativ likspänning. (b) En halvbrygga som använder halva likspänningen. (c) En H-brygga som utnyttjar hela likspänningen.

- 14 -
3.4 Olika topologier på resonanskretsenEtt synsätt på hur en resonansomvandlare fungerar, är den som beskrivits i kapitel 3.1Grundprincipen med hur strömmen går i kretsen och hur switcharna byter polaritet. För att förenkla beräkningarna vid analys av omvandlaren kan man använda sig av en annanmetod som går ut på att se utsignalen från H-bryggan som en fyrkantsvåg medamplituden ±Vdc. Då går det att använda sig av teorin som säger att en fyrkantsvåg äruppbyggd med ett oändligt antal sinussignaler enligt:
4 sin(3 ) sin(5 ) sin(7 )( ) sin( ) ...
3 5 7dcV t t t
u t tω ω ωω
π⎛ ⎞= ⋅ + + + +⎜ ⎟⎝ ⎠
(3.1)
Om fyrkantsvågen har en frekvens som ligger nära resonansfrekvensen fungerarresonanskretsen som ett bandpassfilter där alla övertoner dämpas och kvar blirgrundtonen med en amplitud som ges av:
1
4 dcVV
π= (3.2)
För att den här approximationen ska fungera bra krävs att godhetstalet Q hosresonanskretsen är tillräckligt högt så att övertonerna dämpas på ett effektivt sätt. Menäven om Q är tillräckligt högt kan approximationen bli missvisande då ZCS används där switchfrekvensen måste ligga under resonansfrekvensen. Då arbetsfrekvensen minskaskommer den tredje övertonen att närma sig resonansfrekvensen och därmed förstärkasmer. För att kunna använda approximationen vid analys av ZCS måste man följaktligen se till att ligga nära resonansfrekvensen.
Resonanskretsen kan byggas upp på många olika sätt där antalet L och C kan varierasoch lasten R kan placeras på olika ställen för att uppnå olika resultat. Den enklastekombinationen är den som visas i figur 3.1, där en induktans och en kapacitans används.Ett alternativ till den är att lasten placeras parallellt över kapacitansen och då kallas den för PRC (Parallel Resonant Converter). Ökar man antalet induktiva eller kapacitivakomponenter blir antalet kombinationer väldigt många. En kombination som enligt [7]är effektiv att använda till induktionsvärmare är LLC som innehåller två induktanseroch en kapacitans.
3.4.1 SRC (Series Resonant Converter)I figur 3.5a visas en SRC där insignalen till systemet är amplituden på grundtonen ifyrkantsvågen enligt den tidigare introducerade approximationsmetoden. Eftersominsignalen nu är sinusformig kan vanlig kretsanalys med jω-metoden användas. Ettuttryck för den normaliserade spänningen över lasten blir då:
2 21 2
1
1 11
RV R
V LR L
C R RC
ωωω ω
= =⎛ ⎞ ⎛ ⎞+ − + −⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠
(3.3)

- 15 -
Godhetstalet för en SRC ges av:
LCQ
R= (3.4)
Här ser man att induktansen bör vara större än kapacitansen för att kunna erhålla ettstort Q-värde. Om lasten R ökar sitt värde försämras också Q-värdet, alltså ska denhållas så liten som möjligt. Resonansfrekvensen ges av:
0
1
LCω = (3.5)
Ekvation 3.5 kan användas för att eliminera C respektive L i uttrycket för Q i ekvation3.4, vilket leder till följande uttryck:
0
0
1LQ
R RC
ωω
= = (3.6)
Nu kan ekvation 3.6 användas för att eliminera R, L och C i ekvation 3.3, vilket ger:
21
2 0
0
1
1
RV
VQ
ωωω ω
=⎛ ⎞
+ −⎜ ⎟⎝ ⎠
(3.7)
Resultatet blir ett uttryck som visar sambandet mellan den normaliserade frekvensen,avvikelsen från resonansfrekvensen, och hur spänningen över lasten blir relativtinsignalens storlek. I figur 3.5b visas en graf över sambandet vid fyra olika Q-värden.Här framgår det tydligt hur en resonansomvandlare kan styras med hjälp av att ändrafrekvensen relativt resonansfrekvensen. Om man t.ex. har valt att ligga underresonansfrekvensen (ZCS) innebär en höjning av frekvensen att utsignalen blir större.Väljer man istället att ligga över resonansfrekvensen (ZVS) innebär en höjning avfrekvensen att utsignalen blir lägre. Det här betyder att vid reglering av enresonansomvandlare är det väldigt viktigt att försäkra sig att man ligger kvar inom rättområde, annars kan regleringen bli instabil.

- 16 -
I figur 3.5b ser man också att en SRC kan behandlas som en frekvensberoendespänningsdelare mellan lasten R och impedanserna hos L och C, eftersom utsignalenaldrig kan bli större än vad insignalen är.
1
jωC1
jωL
RV RV
0.4 0.8 1.2 1.6 20
0.2
0.4
0.6
0.8
1
ω / ω0 = f / f
0
VR
/ V
1
← Q = 1
← Q = 2
← Q = 3
← Q = 10
Serie Resonant Converter (SRC)
(a) (b)
Figur 3.5 (a) SRC med en insignal som approximeras av amplituden på grundtonen i fyrkantsvågen,som är systemets verkliga insignal. (b) Normaliserat frekvenssvar från en SRC vid fyra olika Q-värden..
3.4.2 PRC (Parallel Resonant Converter)Om lasten R istället placeras parallellt över kondensatorn kallas konfigurationen förPRC och ett förenklat schema över den kan ses i figur 3.6a. Här blir uttrycket för dennormaliserade spänningen över lasten:
( )2
21 2
1
1
RV
V LLC
R
ωω
=⎛ ⎞− + ⎜ ⎟⎝ ⎠
(3.8)
Godhetstalet för en PRC ges av:
0
RQ
Lω= (3.9)
Här ser man det omvända jämfört med SRC, minskad induktans och högre resistansmedför större Q. Vilket gör att PRC är att föredra i tillämpningar när lasten R är relativ stor. Resonansfrekvensen ges även här av ekvation 3.5, som tillsammans med ekvation3.8 och ekvation 3.9; vilket ger följande uttryck:
22 21
20 0
1
11
RV
V
Q
ω ωω ω
=⎛ ⎞⎛ ⎞ ⎛ ⎞⎜ ⎟− +⎜ ⎟ ⎜ ⎟⎜ ⎟⎝ ⎠ ⎝ ⎠⎝ ⎠
(3.10)

- 17 -
I figur 3.6b visas en graf över förhållandet i ekvation 3.10 med Q = 1,2,3,4. Den största skillnaden mellan en SRC och PRC framgår tydligt; utspänningen kan bli större äninspänningen. Det här leder till att spänningen över kondensatorn kan bli väldigt stor,vilket måste finnas i åtanke vid val av komponenter.
1 jωC1
jωL
RV RV
0.4 0.6 0.8 1 1.2 1.4 1.60
1
2
3
4
Parallel Resonant Converter (PRC)
ω / ω0 = f / f0
VR
/ V
1
← Q = 1
← Q = 2
← Q = 3
← Q = 4
(a) (b)
Figur 3.6 (a) PRC med en insignal som approximeras av amplituden på grundtonen i fyrkantsvågen,som är systemets verkliga insignal. (b) Normaliserat frekvenssvar från en PRC vid fyra olika Q-värden.
3.4.3 LLCI en artikel [7] presenteras en konfiguration kallad LLC som består av två induktanseroch en kapacitans, därav namnet. Den är utformad för att passa till induktionsvärmare.Här följer en kort sammanfattning över vad författarna till artikeln kommit fram till.
Schemat för LLC visas i figur 3.7, där Lp och R utgör induktionsspolen. I artikelnanalyseras ett maximeringsproblem där förhållandet ip / is ska maximeras. Eftersom is är den ström som går genom transistorerna vid switchning ska den hållas så liten sommöjligt. Detta för att minska stressen på komponenterna och minimera förlusteffekterna.Strömmen ip är den som producerar effekten i R och den vill man få så stor som möjligt för att maximera uteffekten. Resultatet blir att med rätt val av värde på C, Ls respektiveLp, kan förhållandet ip / is bli större än ett, vilket innebär att strömmen genom lasten kanvara större än den som måste switchas.
1 C
L
R
V
s
Lp
is ip
ic
Figur 3.7 Ett schema på LLC där Lp och R utgör induktionsspolen.

- 18 -
För att kunna bestämma resonansfrekvensen och Q-värdet för en LLC, måste denparallella induktansen för Ls och Lp beräknas enligt följande formel:
s p
s p
L LL
L L
⋅=
+(3.11)
Nu kan resonansfrekvensen beräknas enligt:
0
1
2f
LCπ= (3.12)
Något som kan vara intressant att undersöka hos en LLC är Q-värdet som ges av:
1 LQ
R C= (3.13)
För att på bästa sätt kunna utnyttja en LLC och uppfylla det maximeringsvillkor somförfattarna till artikeln kommit fram till har de också utformat en algoritm som skaföljas vid beräkning av de komponentvärden som C, Lp och Ls ska ha. Först måste enkravspecifikation fyllas i, se tabell 3.4, och sedan beräknas steg 1-6.
Tabell 3.4 Kravspecifikation som används vid design av en LLC
1. Spänningen ±Vdc som är insignal till omvandlaren Vdc = [V]
2. Frekvensen där maxeffekt ska erhållas f0 = [Hz]
3. Önskad maxeffekt Pmax = [W]
4. Uppskattad resistans på induktionsspolen R = [Ohm]
5. Maxström som får switchas ismax = [A]
6. Maxspänning som får ligga över kondensatorn C vcmax = [V]
Steg1: Beräkna amplituden på grundtonen som är insignal till systemet:
1
4 VdcV
π⋅= (A-1)
Steg2: Testa om följande villkor är uppfyllt:
maxmax
1
2s
Pi
V
⋅> (A-2)
Om inte villkoret A-2 är uppfyllt går inte kravspecifikationen på ismax att uppfylla.Högra ledet i olikheten är den minsta möjliga ström som går att få med önskad uteffektoch den uppnås endast då Q = ∞.

- 19 -
Steg3: Beräkna förhållandet α mellan den parallella och seriella induktansen:
max
1
2p
s
L P R
L Vα
⋅ ⋅= = (A-3)
Steg4: Beräkna inom vilket område som Q måste hålla sig inom:
min 2
max 1
max
1
12
s
Qi V
Pα
=⎛ ⎞⋅ −⎜ ⎟⎝ ⎠
(A-4)
Om villkoret i A-2 är uppfyllt har A-4 alltid en reell lösning:
( )max
max
1 1cV
QV α α
=⋅ ⋅ + (A-5)
Om olikheten Qmax > Qmin inte är uppfylld är kravet på spänningen över kondensatornför stort och högre spänning måste tillåtas för att designen ska lyckas.
Steg5: Val av Q-värde.
• Ska väljas nära Qmax om syftet är att minska stressen på switchkomponenterna.• Ska väljas nära Qmin om syftet är att minska spänningen över kondensatorn.
Steg6: Beräkning av C, Lp och Ls:
0
1
2C
Q R fπ=
⋅ ⋅ ⋅ (A-6)
( )0
1
2p
Q RL
f
απ
⋅ + ⋅=
⋅(A-7)
p
s
LL
α= (A-8)
I bilaga 10.1 Design av LLC finns matlabkod som utför alla stegen i algoritmen.

- 20 -
3.5 Val av resonansomvandlareSyftet med att ersätta det befintliga drivsteget hos CH33 med en resonansomvandlare, är i första hand för att minska effektförlusterna och för att förbättra EMC-egenskaperna.Med detta som utgångspunkt ska en lämplig typ av resonansomvandlare väljas.
För att lyckas erhålla bättre EMC-egenskaper krävs att övertonerna dämpas på etteffektivt sätt, vilket leder till att ZVS är att föredra framför ZCS. Detta medför i sin turatt MOSFET:ar ska användas som switchtransistorer, eftersom dessa fungerar bäst vidZVS där tillslag sker vid väldigt liten spänning över transistorn.
Val av hel- eller halvbrygga har oftast med hur mycket effekt man vill få ut frånomvandlaren. Vid H-brygga blir spänningen dubbelt så stor än vid halvbrygga, vilketleder till att effektuttaget kan fyrdubblas vid konstant last. På prototypkortet väljs halv-brygga dels för att det inte finns några krav på att kunna leverera mycket effekt och delsför att göra konstruktionen lite enklare.
Den topologi som verkar passa bäst till CH33 är LLC. Under rätt förhållanden kan denleverera mer ström till handtaget än den som måste switchas. Vilket leder till en klarförbättring på verkningsgraden.
Sammanfattningsvis ser resonansomvandlaren ut så här:
• ZVS där arbetsfrekvensen ligger över resonansfrekvensen bättre EMC.• MOSFET som switchkomponent, p.g.a. ZVS.• Halvbrygga, p.g.a. litet effektuttag och förenklat prototypkort.• LLC-topologin för att kunna minska switchströmmen med bibehållen uteffekt.

- 21 -
4. Modellering av handtaget
En resonansomvandlare är väldigt beroende av vilken last den ska driva och därförmåste en enkel modell av handtaget på CH33 tas fram. Induktionsspolens enklastemodell består av en induktans L med en serieresistans R, enligt figur 4.1. Värdet pådessa är starkt beroende av den ström som går igenom handtaget och vad som finnsframför magnetfältet, t.ex. luft eller någon metall. Därför måste värdet på dessaidentifieras vid olika strömmar och med både luft och metall framför spolen. Den bästametoden för en sådan identifiering vore att använda en signalgenerator och mäta uppfrekvenssvaret. Dessvärre måste mätningen ske med en ström som ska kunna varierasmellan 0 och 40A och eftersom det inte fanns tillgång till en så kraftig signalgenerator,gick inte den metoden att använda.
Handtaget
L R
Modell
Figur 4.1 En enkel modell av induktionsspolen i handtaget.
En annan metod är att analysera det transienta beteendet hos handtaget, som med enextra seriekondensator bildar ett andra ordningens system, se figur 4.2. Genom attanalysera stegsvaret vid olika spänningar på insignalen kan handtaget testas vid olikatransienta strömmar. Om man använder spänningen över kondensatorn som utsignalfrån systemet kan strömmen i kretsen beräknas genom att derivera spänningen ochmultiplicera med kapacitansen. Systemet är underdämpat med komplexa rötter, vilketleder till att stegsvaret svänger in sig mot ett slutvärde. Dessa svängningar kan utnyttjas för att identifiera R och L i handtaget. I figur 4.3 visas ett typiskt stegsvar från ettunderdämpat system med de parametrar som används för att identifiera systemet.
step
C
R
V
L
i
v
(t)
(t)
Handtaget
ymax
y∞
P
y1
t0 t1
M1=y∞y
Definition av överslängarna
-y∞
M2=y∞y
1-y∞
max
Figur 4.2 Inkoppling av handtaget för
uppmätning av stegsvar v(t) vid olika Vstep.Figur 4.3 Stegsvar från ett andra ordningenssystem som är underdämpat.

- 22 -
4.1 Identifiering av R och LKretsen i figur 4.2 kan ses som en spänningsdelare av inspänningen Vstep, därspänningen över kondensatorn kan skrivas som:
( )2
1 1
1 1t step stepsC LCv V V
RR sL s s
sC L LC
= =+ + + +
(4.1)
Ett vanligt skrivsätt [8] för ett andra ordningens system är:
20
2 20 0
( )2
G ss s
ωζω ω
=+ +
(4.2)
där parametern ζ kallas för relativ dämpning och ω0 är systemets odämpadeegenfrekvens.
Identifiering av ekvation 4.2 mot ekvation 4.1 ger följande uttryck för ζ och ω0 :
CR
Lζ = (4.3)
0
1
LCω = (4.4)
Dessa parametrar kan identifieras från ett stegsvar med hjälp av att mäta upp denrelativa överslängen M1 och den dämpade periodtiden P hos stegsvaret, se figur 4.3.Enligt [8] kan stegsvaret för G(s) i ekvation 4.2 skrivas som:
( ) ( )0
2( ) 1 sin då 1
1
t
d
ey t t
ζω
ω ζζ
−
= − +Φ <−
(4.5)
där Φ uppfyller cos Φ = ζ och den dämpade egenfrekvensen ges av:
20 1dω ω ζ= − (4.6)

- 23 -
Första överslängen inträffar efter ungefär en halv period och då är ω0t ≈ π, vilket ledertill följande uttryck:
21max1
y yM e
y
πζ
ζ
−
−∞
∞
−= ≈ (4.7)
Andra överslängen inträffar en period senare då ω0t ≈ π + 2π vilket ger:
2
3
112
y yM e
y
πζ
ζ
−
−∞
∞
−= ≈ (4.8)
Vanligtvis är dämpfaktorn konstant under hela stegsvaret och då räcker det att analysera den första överslängen. Men i handtaget är dämpfaktorn strömberoende och ändras närströmmen avtar i stegsvaret, uppskattningen måste därför ske för en viss ström. Enlämplig ström att referera till skulle kunna vara den som cirkulerat i kretsen mellanförsta överslängen fram till den andra. Då har man exakt en period av strömmen somkan användas för att beräkna effektivvärdet, RMS (Root Mean Square). Det som återstårär sedan att uppskatta ett värde på dämpfaktorn som funnits mellan de tvåöverslängarna.
Ett alternativ är att ta förhållandet mellan M2 och M1 i ekvation 4.7 och 4.8, vilketskulle leda till följande uttryck:
2
2
12
1
MM e
M
πζ
ζ
−
−= = (4.9)
Löser man ut dämpfaktorn från ekvation 4.9 blir resultatet:
( )
( )( )22
2
2 1ln
41 1ln
M
M
πζ ζπζ
−= ⇔ =− + (4.10)
Den uppskattade dämpfaktorn används i ekvation 4.3 för att beräkna R i handtaget, men då krävs att induktansen L är känd (kapacitansen C mäts upp). Uttrycket för dendämpade egenfrekvensen i ekvation 4.6 används för att bestämma systemets odämpadeegenfrekvens ω0:
0 2
2
1P
πωζ
=⋅ −
(4.11)
där P är den uppmätta periodtiden mellan de två överslängarna.

- 24 -
Nu kan induktansen L beräknas med hjälp av ekvation 4.4, som sedan kan användas iekvation 4.3 för att bestämma resistansen R.
Här följer en kort sammanfattning över de steg som utförs vid identifiering av R och L iett underdämpat system.
Steg1: Mät upp de relativa överslängarna M1 och M2 samt periodtiden P från ettstegsvar som erhållits från ett underdämpat system. Mät upp värdet på kapacitansen C.
Steg2: Beräkna dämpfaktorn ζ för systemet:
( )( )
22
12
1 där
41
ln
MM
M
M
ζπ
= =+ (B-1)
Steg3: Beräkna systemets odämpade egenfrekvens ω0:
0 2
2
1P
πωζ
=⋅ −
(B-2)
Steg4: Beräkna induktansen L:
20
1L
Cω= (B-3)
Steg5: Beräkna resistansen R:
LR
Cζ= (B-4)
I bilaga 10.2 Identifiering av R och L finns det matlabkod, som utifrån mätdata beräknaralla stegen automatiskt och presenterar värdet på R och L.

- 25 -
4.2 Beräkning av strömmenEftersom det endast är spänningen över kondensatorn som är utsignal, måste strömmen i kretsen beräknas med hjälp av följande grundläggande förhållande:
( )( )
tt
dvi C
dt= (4.12)
Riktig derivering av mätdata går ej att utföra. Men genom att beräkna differensenmellan två närliggande mätvärden och dividera med samplingstiden fås en grovuppskattning av derivatan och metoden kallas för ”Euler framåt” [8]:
( ) 1
1
t n n
n n
dv v vV
dt T t t+
+
−∆≈ =∆ −
(4.13)
Nackdelen med deriveringen i ekvation 4.13, är att den är väldigt känslig för brus imätsignalen och därför måste mätdata först filtreras innan derivering. I matlab kan man t.ex. införa ett lågpassfilter av typen ”Butterworth” för att filtrera mätdata innanekvation 4.13 beräknas.
För att beräkna effektivvärdet av strömmen under perioden P används formeln förberäkning av RMS enligt:
2
0
1( )
P
rms (Kontinuerlig tid)I i t dtP
= ∫2
1
m
nnrms (Diskret tid)
iI
m== ∑
(4.14)
I bilaga 10.3 Beräkning av Irms finns det matlabkod som först utför en filtrering avmätdata och sedan beräknar strömmen enligt ekvation 4.12, där derivatan erhålls medekvation 4.13. Effektivvärdet på strömmen beräknas med ekvation 4.14 i diskret tid där m ges av antalet datavärden under perioden P.

- 26 -

- 27 -
5. Simulering och modellering av LLC
I det här kapitlet presenteras två olika metoder för att erhålla en dynamisk beskrivningav den resonansomvandlare som finns beskriven i kapitel 3.4.3 LLC. Först används ettsimuleringsprogram som heter PSPICE. Programmet är vanligt i industrin vidsimulering av elektriska kretsar. Sedan används en matematisk metod, där enlinjäriserad tillståndsmodell tas fram från de differentialekvationer som beskriversystemet.
De passiva komponenterna i systemet är linjära men insignalen, som är en switchadlikspänning, är olinjär. Därför används en metod som heter ”beskrivande funktion” [9]och som är ett användbart matematiskt verktyg vid analys av olinjära system.
5.1 Beskrivande funktionGrundidén med beskrivande funktion är att dela upp det olinjära systemet i två delar, se figur 5.1, där olinjäriteten är den ena delen och resten av systemet G(s) är den andra.Olinjäriteten beskrivs med hjälp av dess fourierserie och genom att anta att resten avsystemet fungerar som ett lågpassfilter, som tar bort alla övertoner, behöver endastgrundtonen behandlas. Insignalen e till olinjäriteten antas alltid vara sinusformig.
Olinjäritet G(s)e u yr
Figur 5.1 Uppdelning av ett olinjärt system.
Eftersom G(s) antas fungera som ett bra lågpassfilter blir insignalen e till olinjäritetenalltid sinusformig (grundtonen) och kan då exempelvis skrivas som:
( )( ) cose t A tω= (5.1)
En periodisk funktion u(t) = u(t+T) har följande fourierserieutveckling:
( )0
1
( ) cos( ) sin( )2 n n
n
Au t A n t B n tω ω
∞
=
= + +∑ (5.2)
där fourierkoefficienterna An och Bn bestäms av:
0
0
2( ) cos( )
t T
n
t
A u t n t dtT
ω+
= ∫0
0
2( ) sin( )
t T
n
t
B u t n t dtT
ω+
= ∫ (5.3)

- 28 -
Om olinjäriteten antas vara en udda funktion försvinner första termen i ekvation 5.2vilket innebär att utsignalen inte innehåller någon likspänning. Eftersom det övrigasystemet G(s) antas vara ett lågpassfilter som tar bort alla övertoner leder det till:
0 för alla 1n nA B n= = >
Detta ger att utsignalen u(t) från olinjäriteten kan approximeras till:
1 1( ) cos( ) sin( )u t A t B tω ω≈ + (5.4)
vilket kan skrivas som:
( ) 2 2 1 11 1 1 1
1
cos , där och tanB
U t U A BA
ω − ⎛ ⎞+ Φ = + Φ = ⎜ ⎟
⎝ ⎠(5.5)
5.2 Användning av beskrivande funktion
Den fullständiga lösningen till en ordinär första ordningens differentialekvation kanbeskrivas som en partikulärlösning (transient lösning) och en homogen lösning(stationär lösning). Vanligtvis vid kretsanalys med en insignal som har sinusformigttidsberoende används den stationära lösningen genom att man lägger på en signal meden viss frekvens och låter den transienta lösningen klinga ut. Sedan används jω-metodenför att få fram en överföringsfunktion till systemet. Är man istället intresserad av dentransienta lösningen gör man en inverslaplacetransformation för att förflyttabeskrivningen av systemet till tidsplanet. Med detta kan dock endast de transientaförloppen undersökas.
I resonansomvandlaren skall det dynamiska beteendet beskrivas vid en frekvensändringpå insignalen. Det innebär att både den transienta lösningen och den stationäralösningen måste behandlas samtidigt, vilket inte är möjligt med vanlig kretsanalys.Lösningen till det här problemet är att beskriva alla signaler i systemet på samma formsom används i beskrivande funktioner, se ekvation 5.4. Detta leder till att varje signalfår en sinus- och cosinusdel som simuleras och modelleras separat. När slutligenutsignalen skall presenteras används ekvation 5.5 för att beräkna amplitud och fas.
I en resonansomvandlare som använder en H-brygga för att switcha likspänningen Vdc,blir insignalen till systemet en fyrkantsvåg med amplituden ±Vdc. Med hjälp avbeskrivande funktion kan insignalen approximeras med den grundton som finns ifyrkantsvågen och som ges av:
( )1
4cosdc sV V tω
π≈ (5.6)

- 29 -
Om alla spänningar och strömmar i resonanskretsen inte ändras under en period avswitchfrekvensen ωs, kan fourierkoefficienterna (se ekvation 5.3) användas för attbeskriva signalerna i systemet. Genom att göra samma antaganden som medbeskrivande funktioner kan ekvation 5.4 användas för att beskriva strömmarna ochspänningarna som:
( ) ( )( ) ( ) cos ( ) sinc s s si t i t t i t tω ω≈ + (5.7a)
( ) ( )( ) ( ) cos ( ) sinc s s sv t v t t v t tω ω≈ + (5.7b)
Deriverar man uttrycken i (5.7) blir resultatet:
( ) ( )cos sinc ss s s s c s
di didii t i t
dt dt dtω ω ω ω⎛ ⎞ ⎛ ⎞= + + −⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠
(5.8a)
( ) ( )cos sinc ss s s s c s
dv dvdvv t v t
dt dt dtω ω ω ω⎛ ⎞ ⎛ ⎞= + + −⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠
(5.8b)
Derivatan av strömmen (5.8a) kan utnyttjas om en spänning över en induktans skabeskrivas. Vidare kan derivatan av spänningen (5.8b) utnyttjas om strömmen genom en kondensator ska beskrivas. I uttrycken (5.8) ser man att även i stationärt tillstånd finnsfrekvensen implicit i amplituden av derivatan. Det är därför som det dynamiskabeteendet vid en ändring av switchfrekvensen kan undersökas i stationärt tillstånd.
5.3 Simulering med PSPICEI början av 1970-talet utvecklades ett simuleringsprogram på University of California iBerkeley som fick namnet SPICE. Namnet står för ”Simulation Program with IntegratedCircuit Emphasis” och blev snabbt en standard inom industrin för simulering av analoga kretsar. Idag finns många olika datorprogram på marknaden. Alla härstammar från deförsta algoritmerna som baseras på de elektriska lagar som finns. MicroSim blev förstmed att göra programmet körbart på en vanlig PC och det fick namnet PSPICE.
I normala fall används PSPICE för att simulera aktiva komponenter som dioder ochtransistorer. Men det finns även möjlighet att skapa egna ström- och spänningskällorsom kan styras av andra strömmar och spänningar. Enligt [10] kan dessa utnyttjas för attsimulera frekvensberoendet på amplituderna av derivatorna i (5.8).

- 30 -
Spänningen över induktansen L med strömmen (5.7a), kan uttryckas som:
( ) ( )cos sinc ss s s s c s
di didiv L L i t L i t
dt dt dtω ω ω ω⎛ ⎞ ⎛ ⎞= = + + −⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠
som sedan delas upp i sinus och cosinus, vilket ger följande två ekvationer:
( )coscc s s s
div L i t
dtω ω⎛ ⎞= +⎜ ⎟⎝ ⎠
(5.9a)
( )sinss s c s
div L i t
dtω ω⎛ ⎞= −⎜ ⎟⎝ ⎠
(5.9b)
På liknande sätt kan strömmen genom kondensatorn C som har spänningen (5.7b) över sig uttryckas som:
( ) ( )cos sinc ss s s s c s
dv dvdvi C C v t C v t
dt dt dtω ω ω ω⎛ ⎞ ⎛ ⎞= = + + −⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠
( )coscc s s s
dvi C v t
dtω ω⎛ ⎞= +⎜ ⎟⎝ ⎠
(5.10a)
( )sinss s c s
dvi C v t
dtω ω⎛ ⎞= −⎜ ⎟⎝ ⎠
(5.10b)
Det här leder till följande metod för att simulera en resonansomvandlare i PSPICE. Mer utförlig förklaring finns i [10] som även innehåller bevis.
Steg1: Beskriv kretsen två gånger, en COS-krets som simulerar cosinus och en SIN-krets som simulerar sinus. Förse COS-kretsen med en spänningsgenerator med samma värde som amplituden på grundtonen i fyrkantsvågen. I SIN-kretsenkortsluts spänningskällan.
Steg2: I serie med alla induktanser placeras en strömstyrd spänningskälla. Var och en styrs av strömmen igenom induktansen i den andra kretsen och harförstärkningen ωsL. Polariteten på spänningskällan är så att den vill minskaspänningen vid induktansen i SIN-kretsen och öka spänningen i COS-kretsen.Se ekvation (5.9a) och (5.9b).
Parallellt över alla kondensatorer placeras en spänningsstyrd strömkälla därvar och en styrs av spänningen över kondensatorn i den andra kretsen och harförstärkningen ωsC. Polariteten på strömkällan är så att den vill minskaströmmen i kondensatorn i SIN-kretsen och öka strömmen i COS-kretsen.Se ekvation (5.10a) och (5.10b).

- 31 -
Efter att dessa steg utförts på LLC-kretsen blir det nya utseendet, som skall användas avPSPICE vid simulering, enligt figur 5.2.
cs
isc
ωsC vcc
ωsLp ipc
SINCOS
cos (ωt)1C
L
R
V
s
Lp
is ip
1 C
L
R
V
s
Lp
ωsLs
isc
ipcvcc
iss
ωsC vcs
ωsLp ips
vc
C
L
R
s
Lp
ωsLs
iss
ipsv
Figur 5.2 Omritning av schemat för LLC vid simulering i PSPICE.
För att kunna använda switchfrekvensen ωs som en parameter i förstärkningen vidström- och spänningskällorna måste den anges som en inspänning till systemet.Utsignalerna från resonansomvandlaren är dels strömmarna is och ip som går genom detvå induktanserna Ls och Lp, dels spänningen vc som ligger över kondensatorn C. Dessa utsignaler fås genom att beräkna belopp och fasvinkel på signalerna från de två olikasimuleringarna och resultatet blir:
( ) 2 2( ) cos där och arctan sss s s sc ss
sc
ii t I t I i i
iω φ φ
⎛ ⎞= + = + = ⎜ ⎟
⎝ ⎠
( ) 2 2( ) cos där och arctan ps
p p p pc ps
pc
ii t I t I i i
iω φ φ
⎛ ⎞= + = + = ⎜ ⎟⎜ ⎟⎝ ⎠
( ) 2 2( ) cos där V och arctan csc c c cc cs
cc
vv t V t v v
vω φ φ
⎛ ⎞= + = + = ⎜ ⎟
⎝ ⎠

- 32 -
I PSPICE kan man utföra tre olika typer av simulering; DC-analys, AC-analys ochtransientanalys. Alla dessa tre kan användas vid simulering av resonansomvandlare föratt få fram viktig information.
Typ av simulering:
DC Här simuleras alla likspänningar. Strömmar och spänningar kan svepasmellan två värden för att få fram en graf på olika beroenden i kretsen.
AC Här simuleras kretsens beteende i frekvensdomänen och detta utförs i tvåsteg. Först görs en DC-analys för att beräkna arbetspunkten i kretsen,därefter testas systemet med en sinussignal som får svepa mellan två olika frekvenser.
Transient Här simuleras kretsens beteende i tidsdomänen. Vid olika tidpunkter kanman införa ändringar på signaler för att undersöka insvängningsförlopp.
Användningsområde vid simulering av resonansomvandlare:
DC Genom att svepa en spänning mellan två olika värden, som iresonansomvandlaren egentligen är en frekvens, kan en kurva översamtliga arbetspunkter mellan de två frekvenserna erhållas. Det här äranvändbart då man vill få reda på vilken frekvens som ska användas för att erhålla en viss utsignal.
AC Frekvenssvaret vid olika arbetspunkter kan analyseras för att få enuppfattning av det öppna systemets bandbredd.
Transient Insvängningsförlopp kan studeras vid olika arbetspunkter och med olikatyper av steg.
I bilaga 10.4 Simulering i PSPICE finns den kod som används för att simulera en LLC i PSPICE.

- 33 -
5.4 TillståndsmodellI en matematisk modell av ett system används kända ekvationer för att beskrivarelationerna mellan in- och utsignalerna. Fördelen med denna typ av modell, är att denger en viss kunskap om systemet som går att utnyttja för att få fram en braregleringsalgoritm. Modellerna består ofta av olika differentialekvationer, som ocksåkan anges på tillståndsform. Detta har fördelen att flervariabla system kan behandlas på samma sätt som envariabla. Beskrivningen av resonansomvandlaren innehåller flera in-och utsignaler och är därför ett flervariabelt system. Därför ska en tillståndsmodell tasfram. Metoden som används bygger på idén med beskrivande funktion.
Eftersom LLC-kretsen innehåller tre obekanta tillståndsvariabler vc is ip krävs minsttre ekvationer för att beskriva systemet. Dessa är:
1 0ss c
div L v
dt− ⋅ − = (5.11)
0=−− Ridt
diLv p
p
pc(5.12)
dt
dvCii c
ps =− (5.13)
Insignalen v1 till systemet kan även här beskrivas med hjälp av beskrivande funktionenligt (5.6) för att få in sambandet med likspänningen Vdc. De tre tillståndsvariablerna is,ip och vc kan approximeras med dess harmoniska beskrivning vid den fundamentalafrekvensen, vilket leder till:
( ) ( )cos( ) ( )sin( )s sc s ss si t i t t i t tω ω= + (5.14a)
( ) ( )cos( ) ( )sin( )p pc s ps si t i t t i t tω ω= + (5.14b)
( ) ( )cos( ) ( )sin( )c cc s cs sv t v t t v t tω ω= + (5.14c)
Derivering av (5.14) ger:
cos( ) sin( )s sc sss ss s s sc s
di di dii t i t
dt dt dtω ω ω ω⎛ ⎞ ⎛ ⎞= + + −⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠
(5.15a)
cos( ) sin( )p pc ps
s ps s s pc s
di di dii t i t
dt dt dtω ω ω ω
⎛ ⎞ ⎛ ⎞= + + −⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠
(5.15b)
cos( ) sin( )c cc css cs s s cc s
dv dv dvv t v t
dt dt dtω ω ω ω⎛ ⎞ ⎛ ⎞= + + −⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠
(5.15c)

- 34 -
Derivatorna i (5.15) används i (5.11) - (5.13), där cosinus och sinus behandlas separat.Detta leder till sex tillstånd istället för tre och systemet kan beskrivas med följande sex ekvationer:
40sc
dc s s ss cc
diV L i v
dtω
π⎛ ⎞− ⋅ + − =⎜ ⎟⎝ ⎠
4sc cc
s ss dc
s s
di vi V
dt L Lω
π= − − + (5.16a)
0sss s sc cs
diL i v
dtω⎛ ⎞− ⋅ − − =⎜ ⎟⎝ ⎠
ss cs
s sc
s
di vi
dt Lω= − (5.16b)
0=−⎟⎟⎠
⎞⎜⎜⎝
⎛+− Rii
dt
diLv pcpss
pcpcc ω
p
ccpss
p
pcpc
L
vi
L
Ri
dt
di+−−= ω (5.16c)
0=−⎟⎟⎠
⎞⎜⎜⎝
⎛−− Rii
dt
diLv pspcs
pspcs ω
p
cspcs
p
psps
L
vi
L
Ri
dt
di++−= ω (5.16d)
⎟⎠⎞⎜
⎝⎛ +=− css
ccpcsc v
dt
dvCii ω css
pcsccc vC
i
C
i
dt
dv ω−−= (5.16e)
⎟⎠⎞⎜
⎝⎛ −=− ccs
cspsss v
dt
dvCii ω ccs
pssscs vC
i
C
i
dt
dv ω+−= (5.16f)
Ekvationerna (5.16) innehåller produkter av insignalen ωs och tillståndsvariabler,således är modellen olinjär. Eftersom huvuddelen av all teori för reglering gäller linjära system, lönar det sig ofta att linjärisera modellen. I praktiken är det ofta tillräckligt attkänna till ett systems beteende kring en viss arbetspunkt. Den förenkling man då utförär att linjärisera den olinjära modellen kring den arbetspunkten. För att linjärisera enmodell krävs först en beräkning av den stationära arbetspunkten, där alla derivator sätts till noll och alla insignaler och tillstånd är i jämvikt och anges med stora bokstäver.Arbetspunkten för (5.16) ges av följande ekvationssystem i matrisform:
0 0 0 1 0 4 /
0 0 0 0 1 0
0 0 1 0 0
0 0 0 1 0
1 0 1 0 0 0
0 1 0 1 0 0
s s sc dc
s s ss
p s pc
p s ps
s cc
s cs
L I V
L I
R L I
L R I
C V
C V
π− Ω − −⎡ ⎤ ⎡ ⎤ ⎡ ⎤⎢ ⎥ ⎢ ⎥ ⎢ ⎥Ω −⎢ ⎥ ⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥− − Ω ⎢ ⎥
=⎢ ⎥ ⎢ ⎥ ⎢ ⎥Ω −⎢ ⎥ ⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥ ⎢ ⎥− − Ω⎢ ⎥ ⎢ ⎥ ⎢ ⎥
− Ω ⎢ ⎥⎢ ⎥ ⎢ ⎥ ⎣ ⎦⎣ ⎦ ⎣ ⎦
(5.17)
Nu införs avvikelser från arbetspunkten på alla insignaler och tillståndsvariabler enligtföljande princip:
)(ˆ)( thHth += (5.18)
ˆdär är vid arbetspunkten och ( ) är den avvikelse som införts.H h t

- 35 -
Efter att (5.18) införts i (5.16), sker en taylorutveckling där endast den första partielladerivatan används.
För till exempel (5.16a) blir uttrycket:
( , , , , , , , )scsc ss pc ps cc cs dc s
dif i i i i v v V
dtω=
och dess linjäriserade ekvation blir:
ˆˆˆ ˆ ˆ ˆ ˆˆ ˆsc
sc ss pc ps cc cs dc s
sc ss pc ps cc cs dc s
di f f f f f f f fi i i i v v V
dt i i i i v v Vω
ω∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂≈ + + + + + + +∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂
där varje partiell derivata löses vid arbetspunkten.
Det olinjära systemet (5.16) får följande utseende efter linjärisering:
ˆ 1 4 ˆˆ ˆˆscs ss cc dc ss s
s s
dii v V I
dt L Lω
π= −Ω − + − (5.19a)
ˆ 1ˆ ˆˆsss sc cs sc s
s
dii v I
dt Lω=Ω − + (5.19b)
spscc
p
psspc
p
pc IvL
iiL
R
dt
idωˆ
1ˆˆˆ
−+Ω−−= (5.19c)
spccs
p
pcsps
p
ps IvL
iiL
R
dt
idωˆ
1ˆˆˆ
++Ω+−= (5.19d)
scscsspcsccc Vvi
Ci
Cdt
vd ωˆˆ1ˆ1ˆ−Ω−−= (5.19e)
sccccspssscs Vvi
Ci
Cdt
vd ωˆˆ1ˆ1ˆ+Ω+−= (5.19f)

- 36 -
Amplituderna på utsignalerna från systemet blir efter linjärisering:
2 2s sc ssi i i= + 2 2 2 2
ˆ ˆ ˆsc sss sc ss
sc ss sc ss
I Ii i i
I I I I= +
+ +(5.20a)
2 2p pc psi i i= + 2 2 2 2
ˆ ˆ ˆpc ps
p pc ps
pc ps pc ps
I Ii i i
I I I I= +
+ +(5.20b)
2 2c cc csv v v= + 2 2 2 2
ˆ ˆ ˆcc csc cc cs
cs cc cs cc
V Vv v v
V V V V= +
+ +(5.20c)
Nu kan hela systemet skrivas på matrisform enligt:
x Ax Bu
y Cx
= +⎧⎨ =⎩
där ˆ ˆ ˆ ˆ ˆ ˆT
sc ss pc ps cc csx i i i i v v⎡ ⎤= ⎣ ⎦ och [ ]ˆ ˆT
dc su V ω=
10 0 0 0
10 0 0 0
10 0 0
10 0 0
1 10 0 0
1 10 0 0
s
s
s
s
s
p p
s
p p
s
s
L
L
R
L LA
R
L L
C C
C C
⎡ ⎤−Ω −⎢ ⎥⎢ ⎥⎢ ⎥Ω −⎢ ⎥
⎢ ⎥⎢ ⎥
− −Ω⎢ ⎥⎢ ⎥
= ⎢ ⎥⎢ ⎥Ω −⎢ ⎥⎢ ⎥⎢ ⎥− −Ω⎢ ⎥⎢ ⎥⎢ ⎥− Ω⎢ ⎥⎣ ⎦
4
0
0
0
0
0
ss
s
sc
ps
pc
cs
cc
IL
I
I
B
I
V
V
π⎡ ⎤−⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥
−⎢ ⎥⎢ ⎥= ⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥
−⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎣ ⎦
2 2 2 2
2 2 2 2
2 2 2 2
0 0 0 0
0 0 0 0
0 0 0 0
sc ss
sc ss sc ss
pc ps
pc ps pc ps
cc cs
cc cs cc cs
I I
I I I I
I IC
I I I I
V V
V V V V
⎡ ⎤⎢ ⎥⎢ ⎥+ +⎢ ⎥⎢ ⎥
= ⎢ ⎥+ +⎢ ⎥
⎢ ⎥⎢ ⎥⎢ ⎥+ +⎣ ⎦
I bilaga 10.5 Beräkning av tillståndsmodell finns matlabkod för att beräkna matrisernaA, B och C i tillståndsmodellen.

- 37 -
5.5 Sammanfattning
I det här kapitlet har ”beskrivande funktion” presenterats som är ett matematiskt verktyg för analys av olinjära system. Metoden används dels för att approximera insignalen tillsystemet, som är en fyrkantsvåg, med dess grundton och dels för att beskriva allasignaler i systemet med både en sinus- och cosinusdel. Genom vanlig traditionellkretsanalys tillsammans med beskrivande funktion kunde en simuleringsmodell iPSPICE och en linjäriserad tillståndsmodell av resonansomvandlaren tas fram.

- 38 -
- 39 -
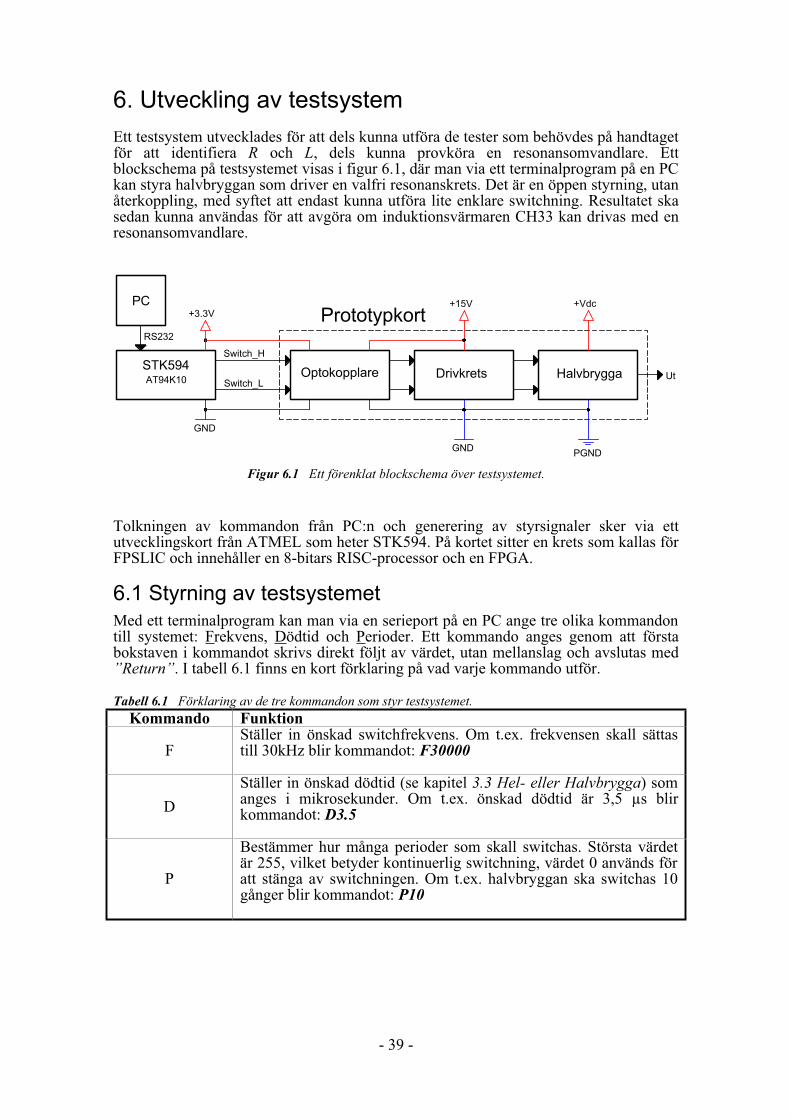
6. Utveckling av testsystem
Ett testsystem utvecklades för att dels kunna utföra de tester som behövdes på handtaget för att identifiera R och L, dels kunna provköra en resonansomvandlare. Ettblockschema på testsystemet visas i figur 6.1, där man via ett terminalprogram på en PC kan styra halvbryggan som driver en valfri resonanskrets. Det är en öppen styrning, utan återkoppling, med syftet att endast kunna utföra lite enklare switchning. Resultatet skasedan kunna användas för att avgöra om induktionsvärmaren CH33 kan drivas med enresonansomvandlare.
PC
RS232
STK594Switch_H
Switch_LOptokopplare Drivkrets Halvbrygga
AT94K10 Ut
+3.3V+15V
GND
+Vdc
PGND
GND
Prototypkort
Figur 6.1 Ett förenklat blockschema över testsystemet.
Tolkningen av kommandon från PC:n och generering av styrsignaler sker via ettutvecklingskort från ATMEL som heter STK594. På kortet sitter en krets som kallas för FPSLIC och innehåller en 8-bitars RISC-processor och en FPGA.
6.1 Styrning av testsystemetMed ett terminalprogram kan man via en serieport på en PC ange tre olika kommandon till systemet: Frekvens, Dödtid och Perioder. Ett kommando anges genom att förstabokstaven i kommandot skrivs direkt följt av värdet, utan mellanslag och avslutas med”Return”. I tabell 6.1 finns en kort förklaring på vad varje kommando utför.
Tabell 6.1 Förklaring av de tre kommandon som styr testsystemet.
Kommando Funktion
FStäller in önskad switchfrekvens. Om t.ex. frekvensen skall sättastill 30kHz blir kommandot: F30000
D
Ställer in önskad dödtid (se kapitel 3.3 Hel- eller Halvbrygga) somanges i mikrosekunder. Om t.ex. önskad dödtid är 3,5 µs blirkommandot: D3.5
P
Bestämmer hur många perioder som skall switchas. Största värdetär 255, vilket betyder kontinuerlig switchning, värdet 0 används för att stänga av switchningen. Om t.ex. halvbryggan ska switchas 10gånger blir kommandot: P10

- 40 -
6.2 UtvecklingskortAtmel har ett utvecklingspaket som heter STK500 som används för att testa deras olika processorfamiljer. Med tilläggskort STK594 får man tillgång till en krets från en familjkallad för FPSLIC. Förkortningen står för ”Field Programmable System LevelIntegrated Circuit” och benämningen på kretsarna inom familjen är AT94K. Dessakretsar innehåller både en mikrokontroller och en FPGA (Field Programmable GateArray).
Det finns två olika sätt att implementera en processorkärna i en FPGA. Antingen kanden vara fast i kislet och kallas då för en ”hård” kärna, eller kan den vara programmerad i logiken och kallas då för en ”mjuk” kärna. FPSLIC använder en ”hård”mikrokontroller. Den består av en 8-bitars RISC-processor som är uppbyggd medAtmels AVR-arkitektur. Det är en arkitektur som har blivit väldigt populär under desenaste åren, särskilt inom branscher som vitvaror och mobiltelefoner. Anledningen äratt AVR-kretsarna är billiga och relativt kraftfulla eftersom de kan utföra en instruktionper klockcykel.
Det finns tre olika storlekar på grindmatrisen i FPSLIC: 5000, 10 000 och 40 000grindar. Dessa har benämningen: AT94K05, AT94K10 och AT94K40. Det här är ettganska litet antal grindar för att vara en FPGA, men i kombination med enmikrokontroller kan det räcka för att bygga lite önskad periferilogik. Påutvecklingskortet STK594 sitter kretsen AT94K10.
Eftersom FPGA:er ofta är uppbyggda med SRAM försvinner innehållet i minnet dåströmmen stängs av. Det här löser man vanligtvis med en yttre konfigurator. Den är ettminne där programmet ligger sparat och som vid uppstart överför koden automatiskt till FPGA:n. Atmel har också en variant av kretsar som har benämningen AT94S, där S står för ”Secure FPSLIC”. Den har konfiguratorn monterad i samma kapsel, vilket kanförhindra avlyssning av dataöverföringen vid uppstart.
Den mjukvara som följer med STK594 heter System Designer och är egentligen ettprogram som automatiserar hanteringen av flera andra program:
• Mentor ModelSim VHDL/Verilog-simulator• Mentor Leonardo Syntes.• Mentor Seamless samverifieringsverktyg• AVR Studio simulator, debugger, emulator frontend.• Figaro Place & Route.• Bitstream Generator• CPS Configurator Down-loader
För att beskriva funktionen man vill utföra i logiken, används programmeringsspråketVHDL (VHSIC Hardware Description Language). Det är ett språk som hanterar alltfrån simulerbara specifikationer ned till syntes av digital elektronik. Med ModelSim kan man testa koden för att se om resultatet blev det önskade. Leonardo översätter koden till en nätlista av digitala grundblock, som sedan byggs upp av logiska grindar. Nätlistanskickas till Figaro som väljer ut vilka grindar i kretsen som skall användas och skaparförbindelser mellan dessa. Resultatet blir en ”FPGA bitstream” som kan laddas ner ikretsen.
Programmet till mikrokontrollern skrevs i IAR Embedded Workbench. Det är enC-kompilator som redan används på företaget. Efter kompilering och assemblering avkällkoden erhålls en ”AVR Hex File” som kan testköras med AVR Studio för att se omallt fungerar eller för felsökning. När man har ett fungerande program användsBitstream Generator för att slå ihop ”FPGA bitstream” och ”AVR Hex File” till en filsom överförs till utvecklingskortet med CPS Configurator.

- 41 -
6.3 Beskrivning av kretsenEftersom FPSLIC innehåller både en mikrokontroller och en FPGA måste kopplingenmellan dessa anges i Figaro. Där anger man också vilka signaler som ska komma utfrån kretsen och som måste anslutas till något ben. Ett blockschema över hur kretsen itestsystemet konfigurerades finns i figur 6.2.
Clk
AVRMikrokontroller
FPGA
GCLK5
AVR Data Bus 8-bit RegIn[7:0]
Global Clock 5
Fiowea
Load_RegL
Load_RegH
Load_DT
Reset
Switch_H
Switch_L
IOSELA0
IOSELA1
IOSELA2
FIOWEAAVR Write Enable
FPGA I/O SELECT 0
FPGA I/O SELECT 1
FPGA I/O SELECT 2
Load_NoPIOSELA3FPGA I/O SELECT 3
TX0
RX0UART0
CLOCK10 MHz
Reset
Figur 6.2 Ett blockschema på hur FPSLIC är konfigurerad i testsystemet.
6.3.1 MikrokontrollernMikrokontrollern arbetar med en klockfrekvens på 10 MHz, som också går vidare tillFPGA:n via ”Global Clock 5”. Kommandon från PC:n tas emot via UART0, som ärkonfigurerad för en bithastighet på 9600 bit/s. När ett tecken tas emot lagras det i enbuffert, sedan inväntas nästa tecken. Detta pågår tills tecknet för ”Return” upptäcks, dåtolkas första bokstaven i den mottagna strängen. Om det är ett giltigt tecken (F, D eller P) läses efterföljande siffervärdet in och testas för att se om det är inom tillåtna gränser.Därefter utförs de beräkningar som finns angivna i tabell 6.2, för att få rätta värden tillFPGA:n.
Tabell 6.2 Beräkning av indata för att få rätt format som används av FPGA:n.
Indata Beräkning Utdata
F (heltal)
En frekvens räknas om till antalet perioder som 10 MHz hinner svänga under en halv period av frekvensen F.
710RegH & RegL
2 F=
⋅
16-bitars tal
D (flyttal)En tid D angiven i mikrosekunder, räknas om till antal perioder vid 10 MHz.
DT 10D= ⋅8-bitars tal
P (heltal)Ingen beräkning behöver utföras, värdet skickas direkt till FPGA:n.
NoP P=8-bitars tal

- 42 -
När beräkningarna är klara överförs resultatet till FPGA:n via en 8-bitars databuss. Fyrasändningar krävs för att få över informationen och med hjälp av IOSELA3 - IOSELA0adresseras varje överföring till rätt register. För att detta ska fungera måste det ske i rätt ordning, från A3 till A0. När sista registret har fått sitt värde börjar den nyainformationen att användas av FPGA:n.
6.3.2 Uppbyggnad av logikenEn vanlig metod inom digital elektronik är att använda en FSM (Finite State Machine)för att skapa den funktion man önskar. De är uppbyggda av olika tillstånd somprocessen kan hoppa emellan då vissa villkor är uppfyllda och vid varje tillståndlevereras rätt sorts utsignaler. I figur 6.3 visas ett blockschema över de fem FSM:er som implementerades i FPGA:n.
Clk
FSM1
RegIn[7:0]
Fiowea
Load_RegL
Load_RegH
Load_DT
Reset
Load_NoP
(Ladda Register)
8
Clk
NoP
Reset
(16-bitars Räknare)
8
DataValid
8
16
DT
Counter_ValueRegL
RegH 8
8
DT_Value
NoP_Counter
Clk
FSM5
Reset
(Switchning)
DeadTime
Counter_Max
Idle
Start
NoP_dec
Switch_H
Switch_L
FSM4
FSM2
FSM3
DataValid
DataValid
DataValid
(8-bitars Räknare)
(8-bitars Räknare)
Figur 6.3 Blockschema över de FSM:er som genererar switchsignalerna från FPGA:n.
FSM1: Sköter om kommunikationen med mikrokontrollern och ser till att data skrivs in i rätt register. När alla register fått ett giltigt innehåll sätts DataValid=’1’.I figur 6.4 visas ett tillståndsdiagram för FSM1.
Fiowea
Load_RegL
Load_RegH
Load_DT
Load_NoP
In1 =
RESET
Out1 = '0'
DataValid
Out1 =
Reset = '0'
S0
Out1 = '0'
In1 = "10001"
S1
Out1 = '0'RegIn => DT
In1 = "10010"
S3
Out1 = '1'RegIn => RegL
S2
Out1 = '0'RegIn => RegH
In1 = "10100"In1 = "11000"
In1 = "10001"
RegIn => NoP
Figur 6.4 Tillståndsdiagram för FSM1.

- 43 -
FSM2: En 16-bitars räknare som räknar från 1 till det maxvärde som skrivs in i registret Counter_Value. En puls skapas på utsignalen Counter_Max när räknaren nått sittmaxvärde och börjar sedan räkna om från 1 igen. I figur 6.5 visas ett tillståndsdiagramför FSM2.
RESET
Out2 = Counter_Max
Reset = '0'
S0Out2 = '0'
DataValid = '1'Out2 = '0'
R1 = Räknare (16-bitar)
R1 = 1
R2 = Counter_Value (16-bitar)
RegH & RegL => R2
S1Out2 = '0'
R1 < > R2
S3Out2 = '0'
DataValid = '1'
S2Out2 = '1'
DataValid = '0'
R1 = R1+1
DataValid = '1' R1 = R2
R1 = 1
Register
Utsignaler
Figur 6.5 Tillståndsdiagram för FSM2.
FSM3: En 8-bitars räknare som räknar från 1 till det maxvärde som skrivs in i registret DT_Value. En puls skapas på utsignalen DeadTime när räknaren når sitt maxvärde ochdär stannar räknaren tills en puls kommer på Counter_Max, då börjar den räkna om från1 igen. I figur 6.6 visas ett tillståndsdiagram för FSM3.
RESET
Out3 = DeadTime
Reset = '0'
S0Out3 = '0'
DataValid = '1'Out3 = '0'
R3 = Räknare (8-bitar)
R4 = DT_Value (8-bitar)
DT => R4
S1Out3 = '0'
DataValid = '1'
S4Out3 = '0'
Register
Utsignaler
S2Out3 = '0'
R3 < > R4
S3Out3 = '1'
R3 = R3+1
R3 = R4
Counter_Max = '1'
R3 = 1
DataValid = '0'
DataValid = '1'
Figur 6.6 Tillståndsdiagram för FSM3.
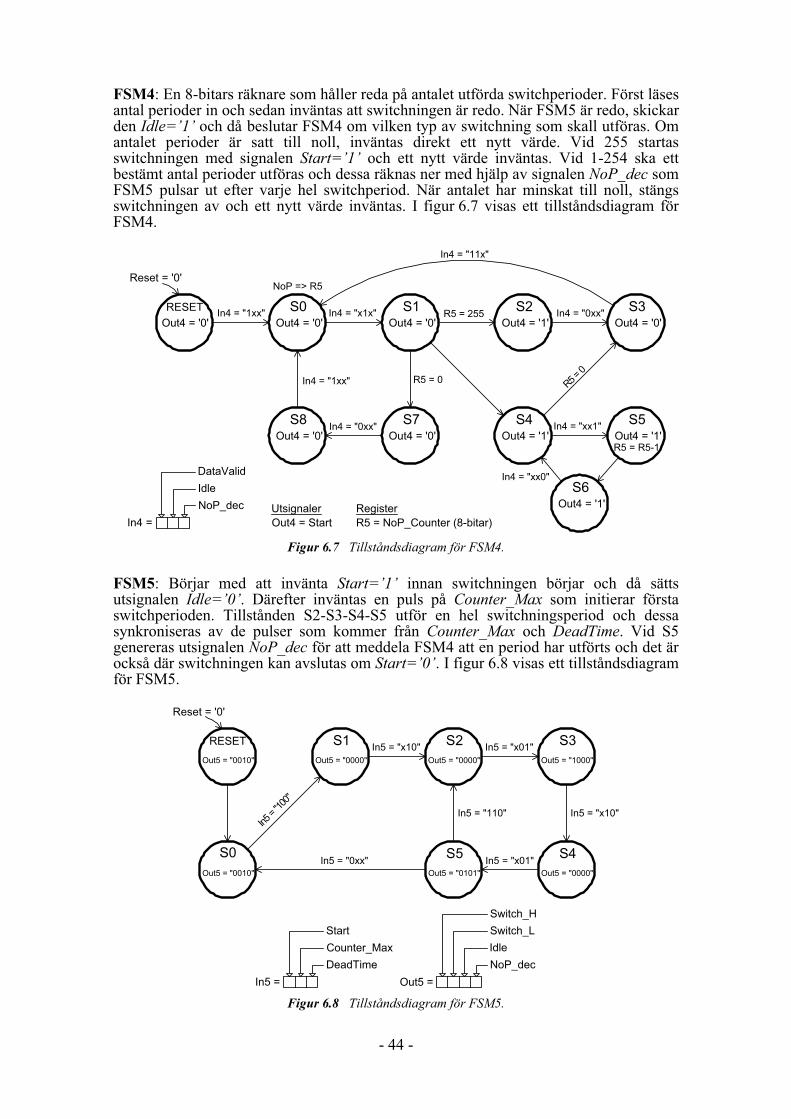
- 44 -
FSM4: En 8-bitars räknare som håller reda på antalet utförda switchperioder. Först läses antal perioder in och sedan inväntas att switchningen är redo. När FSM5 är redo, skickar den Idle=’1’ och då beslutar FSM4 om vilken typ av switchning som skall utföras. Omantalet perioder är satt till noll, inväntas direkt ett nytt värde. Vid 255 startasswitchningen med signalen Start=’1’ och ett nytt värde inväntas. Vid 1-254 ska ettbestämt antal perioder utföras och dessa räknas ner med hjälp av signalen NoP dec som FSM5 pulsar ut efter varje hel switchperiod. När antalet har minskat till noll, stängsswitchningen av och ett nytt värde inväntas. I figur 6.7 visas ett tillståndsdiagram förFSM4.
RESET
Out4 = Start
Reset = '0'
S0Out4 = '0'
In4 = "1xx"Out4 = '0'
R5 = NoP_Counter (8-bitar)
NoP => R5
RegisterUtsignaler
S2Out4 = '1'
S7Out4 = '0'
S4Out4 = '1'
R5 = 255
R5 = 0
S8Out4 = '0'
In4 = "0xx"
S1Out4 = '0'
In4 = "x1x"
In4 = "1xx"
In4 = "0xx"
S5Out4 = '1'
In4 = "xx1"
R5 = R5-1
R5 = 0
DataValid
Idle
NoP_dec
In4 =
S3Out4 = '0'
In4 = "11x"
S6Out4 = '1'
In4 = "xx0"
Figur 6.7 Tillståndsdiagram för FSM4.
FSM5: Börjar med att invänta Start=’1’ innan switchningen börjar och då sättsutsignalen Idle=’0’. Därefter inväntas en puls på Counter_Max som initierar förstaswitchperioden. Tillstånden S2-S3-S4-S5 utför en hel switchningsperiod och dessasynkroniseras av de pulser som kommer från Counter_Max och DeadTime. Vid S5genereras utsignalen NoP_dec för att meddela FSM4 att en period har utförts och det är också där switchningen kan avslutas om Start=’0’. I figur 6.8 visas ett tillståndsdiagram för FSM5.
RESET
Reset = '0'
S1
In5 =
"100"
Out5 = "0010"
In5 = "x10"
Start
Counter_Max
DeadTime
In5 =
Switch_H
Switch_L
NoP_dec
Out5 =
Idle
Out5 = "0010"
S0
S2
S4S5In5 = "x01"
S3In5 = "x01"
Out5 = "0000" Out5 = "0000" Out5 = "1000"
Out5 = "0000"Out5 = "0101"
In5 = "x10"In5 = "110"
In5 = "0xx"
Figur 6.8 Tillståndsdiagram för FSM5.

- 45 -
6.4 Beskrivning av prototypkortetKortet är uppdelat i tre olika block, där det första blocket fungerar som ett galvanisktskydd mellan FPGA:n och kraftdelen. Andra blocket innehåller till största delen endrivkrets från STMicroelectronics, som är framtagen för att användas vid drivning avtransistorer i en halvbrygga. Sista blocket innehåller två MOSFET:ar från en familj som kallas för CoolMOS och kommer från Infineon Technologies. Ett fullständig schemaöver hela prototypkortet finns under bilaga 10.6 Schema på prototypkortet.
6.4.1 OptokopplareFör att förhindra att båda transistorerna är till samtidigt, finns lite extra logik innanstyrsignalerna från FPGA:an kommer fram till optokopplarna. De logikkretsar somanvänds är från 74HC-familjen och fungerar bra att använda vid spänningar på 3.3V,som är den spänningsnivå som FPGA:n använder. Den buffert som sitter på utgången av logikkretsen, används för att få en snabb och effektiv drivning av dioden ioptokopplaren. En optokopplare är en komponent som med ljus överför en signal och på så sätt uppstår den galvaniska isolationen. Den komponent som användes påprototypkortet heter HCPL-4503 och tillverkas av Agilent Technologies. Det är en snabb optokopplare som klarar av frekvenser upp till 100 kHz.
6.4.2 DrivkretsFör att öppna en MOSFET-transistor ordentligt krävs en spänning på minst 10V mellanGate och Source. I en halvbrygga leder detta till problem med den övre transistorneftersom den inte har Source kopplad till jord, utan till lasten där spänningen hela tiden varierar. För att kunna öppna den övre transistorn krävs då en styrspänning som är 10V över denna varierande spänning. Här finns det speciella drivkretsar som löser problemet genom utnyttja en kondensator (Cboot) som hela tiden ser till att denna extra spänningfinns tillgänglig då transistorn ska öppnas.
Den drivkrets som används på prototypkortet heter L6386 och kommer frånSTMicroelectronic. Den kan driva halvbryggor med spänningar på upp till 600V. Ifigur 6.9 syns den interna uppbyggnaden på L6386 och hur de externa komponenternakopplas in.
Figur 6.9 Den interna uppbyggnaden på drivkretsen L6386.

- 46 -
På prototypkortet används Vcc = 15V och switchsignalerna efter optokopplarna går in på de två ingångarna HIN och LIN. Kretsen har en extra ingång som heter SD, den kananvändas för att snabbt kunna stänga av båda styrsignalerna till transistorerna. Denfunktionen används inte i den här applikationen, utan sätts till +15V via ett motstånd för att kretsen ska vara aktiv hela tiden. En annan extra funktion som inte utnyttjas ärströmövervakning i halvbryggan via ett shuntmotstånd, vars spänning ska gå in på CIN.Om spänningen överstiger 0.5V dras signalen DIAG ner till jord och indikerar attströmmen är för stor.
6.4.3 HalvbryggaHalvbryggan är uppbyggd av två MOSFET:ar av typen CoolMOS som heterSPW47N60C2 och kommer från Infineon Technologies. Transistorn tål spänningar upptill 650V och strömmar upp till 47A. Det som är utmärkande för CoolMOS är detmycket låga värdet på RDS(on), som kan bli så lågt som 0.07Ω vid rätt typ av drivning.Maximal förlusteffekt som transistorn klarar av att leda bort är 415W, vilket är mycketmed tanke på den lilla kapsel som används, se figur 6.10. För att få det att fungera krävsen mycket effektiv kylning, men för testsystemet används en mindre och enklarekylning som klarar av att leda bort 20-30W.
Figur 6.10 Kapseln TO-247 som SPW47N60C2 använder.

- 47 -
7. Resultat av experiment och simuleringar
Två olika tester utfördes med hjälp av testsystemet, ett stegsvarstest på handtaget och entestkörning av LLC mot handtaget. Resultatet från dessa tester presenteras i detta kapitel och även resultat från simuleringen av resonansomvandlaren i PSPICE samt litejämförande tester mellan tillståndsmodellen och simuleringsmodellen.
7.1 Mätning på handtagetFör att identifiera parametrarna R och L i modellen för handtaget användes testsystemet på följande sätt: Utsignalen från prototypkortet kopplades till handtaget via enkondensator med ett värde som uppmättes till C=2.243µF. Under varje test loggadesspänningen över kondensatorn med två kanaler på ett digitalt oscilloskop, se figur 7.1.
Halvbrygga Ut
+Vdc
PGND
C
R
CH1 CH2
Oscilloskop
Lecroy 9310A
Metallbit
L
Figur 7.1 Uppkoppling vid mätning av stegsvaret på handtaget.
Tester utfördes med handtaget i luft, mot aluminium och mot vanligt järn, för att kunna undersöka hur dessa påverkar modellen. Stegspänningen (+Vdc) började på 25V ochökades sedan med 25V efter varje test, tills den slutliga spänningen på 325V hadeuppnåtts. De kommandon som skickades till testsystemet var: F1000, D0.5, P1, vilketgav ett tillräckligt långt steg för att resonanskretsen skulle nå sitt slutvärde.
I figur 7.2 kan man se skillnaden mellan resultaten från de tre olika mätningarna. Denstörsta avvikelsen uppstod mot järn, där blev stegsvaret kraftigt dämpat. Jämför manmed aluminium, ser man en betydligt sämre dämpning. Detta beror på att induktionenfungerar sämre mot aluminium än mot järn. Anledningen till det är att aluminium inte är magnetiskt och för att den elektriska resistiviteten är mycket lägre. En intressant detaljär också att dämpningen för aluminium inte avviker så mycket från dämpningen i luft,där nästan all dämpning består av förlusteffekter i handtaget. Detta visar attverkningsgraden vid uppvärmning av aluminium är väldigt låg.
Tittar man lite på periodtiderna hos svängningarna i stegsvaren (figur 7.2), ser man attdessa ändras åt olika håll då handtaget läggs mot aluminium respektive mot järn. Motaluminium minskar periodtiden och alltså höjs resonansfrekvensen, vilket innebär enminskning av induktansen (ekvation 3.5). Mot järn ökar istället periodtiden, vilketinnebär en ökning av induktansen.

- 48 -
(a) Handtaget i luft. (b) Handtaget mot aluminium.
(c) Handtaget mot järn.
Figur 7.2 Bilder från oscilloskopet efter ett stegsvar med Vdc = 100V.
Mätvärdena från stegsvaren används i de beräkningsalgoritmer som tagits fram i kapitel 4. Modellering av handtaget och som finns presenterade som matlabkod underbilagorna 10.2 Identifiering av R och L och 10.3 Beräkning av Irms. Resultatet på hurresistansen och induktansen beror på effektivvärdet på strömmen i handtaget, finns ifigurerna 7.3 och 7.4. För luft och aluminium blir resultaten ganska oberoende avströmmen, men för järn syns en avtagande trend som visar en minskning av bådeinduktansen och resistansen då strömmen ökar. Kurvan för järn innehåller också enannan stor avvikelse, nämligen att den slutar redan vid en ström på ca 15A. Orsaken äratt den maximala stegspänning som användes inte orkade driva mer än den strömmenp.g.a. den kraftiga dämpningen i handtaget.

- 49 -
0 10 20 300
0.4
0.8
1.2
1.6
Resistansen som funktion av strömmen i handtaget
Luft
Aluminium
Järn
Irms [A]
R [Ω
]
Figur 7.3 Resultat från beräkningarna av resistansen i handtaget vid olika strömmar.
0 10 20 30
30
40
50
60Induktansen som funktion av strömmen i handtaget
Luft
Aluminium
Järn
Irms [A]
L [µH
]
Figur 7.4 Resultat från beräkningarna av induktansen i handtaget vid olika strömmar.
7.2 Dimensionering av LLCFör att kunna prova en LLC som inkluderar handtaget, måste lämpliga värden på C och Ls tas fram. I kapitel 3.4.3 LLC finns en designalgoritm presenterad för att beräknavärdena på C, Lp och Ls, men eftersom handtaget redan har ett givet värde på Lp måsteberäkningarna istället utgå från det. För att få tag på komponenter inom rimlig tid, harstandardvärden används vilket ledde till att designalgoritmen mest har används förverifiering. Målet har varit att få en arbetsfrekvens på ca 20 - 25 kHz, och dekomponentvärden som valdes blev: C = 2.2µF & Ls = 100µH.
Genom att använda ekvation 3.11 - 3.13 kan resonansfrekvensen och Q-värdet för LLC med handtaget beräknas. Resultatet visas i figur 7.5 - 7.6. Där kan man se vilka kraftiga variationer på både resonansfrekvensen och Q-värdet som uppstår då handtaget flyttasmellan luft och till de två olika metallerna. Den här variationen gör systemet väldigtsvårt att styra med en regleringsalgoritm, eftersom de stora hoppen i resonansfrekvensen gör att omvandlaren snabbt kan råka byta arbetsområde från t.ex. ZVS till ZCS.

- 50 -
Det väldigt låga Q-värdet när handtaget är mot järn, leder till att LLC inte fungerar såeffektivt som den är tänkt att göra. Anledningen till detta är att resistansen ökar kraftigt mot järn (figur 7.3) och i ekvationen 3.13 ser man att en ökad resistans medför lägre Q-värde.
0 10 20 3017
18
19
20
21
22
23Resonansfrekvensen som funktion av strömmen
Luft
Aluminium
Järn
C=2.2µF
Ls=100µH
Irms [A]
f 0 [kH
z]
Figur 7.5 Resonansfrekvensen för LLC som funktion av strömmen i handtaget.
0 10 20 302
4
6
8
Q-värde som funktion av strömmen
Luft
Aluminium
Järn
C=2.2µF
Ls=100µH
Irms [A]
Q-v
ärd
e
Figur 7.6 Q-värdet för LLC som funktion av strömmen i handtaget.

- 51 -
7.3 TestkörningUppkopplingen visas i figur 7.7. Där kan man se hur halvbryggan balanseras upp avhalva likspänningen för att slippa använda både positiv och negativ likspänning. Det ärviktigt att de två kondensatorerna som sitter i spänningsdelaren har mycket större värde än vad kondensatorn i LLC har, annars kan resonansfrekvensen påverkas.
Halvbrygga Ut
+Vdc
PGND
C=2.2µFL
R
s
L p
Handtaget
PGND
+Vdc
=100µH 47kΩ
47kΩ
470µF
470µF
Figur 7.7 Uppkoppling för testkörning av LLC.
Under testkörningen prövades olika inspänningar mellan 25 och 150V, beroende på hur varma switchtransistorerna blev. Som utsignal från systemet användes spänningen överkondensatorn C. Denna undersöktes med ett oscilloskop för att se hur sinusformigsignalen var.
När handtaget var i luft, vilket motsvarar det högsta Q-värdet, fungeraderesonansomvandlaren bra med en snygg sinusformig utsignal. Maxspänningen nåddesvid ungefär 21 kHz, vilket stämmer bra med den resonansfrekvens som syns i figur 7.5.
Med aluminium började en viss försämring av utsignalen framträda ocheffektförlusterna i transistorerna ökade. Resonansfrekvensen lokaliserades till ungefär23 kHz, vilket också stämmer med figur 7.5. Men här var det svårare att hittamaxvärdet, eftersom det lägre Q-värdet plattar till karaktäristiken på utsignalen.
Vid test mot järn blev Q-värdet väldigt lågt, vilket märktes tydligt genom att utsignalen inte alls var lika känslig mot ändringar i switchfrekvensen. Resonansfrekvensen varväldigt svår att hitta och låg någonstans mellan 15 och 20 kHz. Här förekom ocksåperiodiska störningar på utsignalen, som kan liknas vid att switchningen kommer imotfas med svängningen i kretsen. Det här ledde till att resonansen avtog helt ner tillnoll ett tag, för att sedan komma igång och svänga igen. En orsak till beteendet skullekunna vara att värdena i handtaget mot järn är väldigt strömberoende. Det här leder till att resonansfrekvensen också blir väldigt strömberoende och strömmen bestäms avförhållandet mellan resonansfrekvensen och switchfrekvensen.

- 52 -
7.4 Resultat från simulering i PSPICESimuleringen har utförts genom att använda den kod som bygger upp en modell av LLC i PSPICE och som finns presenterad under bilaga 10.4 Simulering i PSPICE. I modellen anges strömmen Is med V(As), strömmen Ip med V(Ao) och spänningen överkondensatorn C med V(Ac). Switchfrekvensen anges som en inspänning till systemet,där 1V motsvarar 1Hz. Följande komponentvärden har använts vid simuleringen:
• C = 2.2µF• Ls = 100µH• Lp(Luft) = 35.4µH ; Lp(Järn) = 51.0µH (Ett medelvärde)• R(Luft) = 0.43 Ω ; R(järn) = 1.46 Ω (Ett medelvärde)• Vdc = 50V
I figur 7.8 presenteras resultatet från en DC-simulering där man kan se hur spänningaroch strömmar är beroende av switchfrekvensen. Maxvärde på utsignalerna erhålls vidresonansfrekvensen, som i figur 7.8 ser ut att ligga väldigt nära 21 kHz. I tabell 7.1 visas resultatet från tre olika arbetspunkter som är uppmätta från figur 7.8 i PSPICE. Här syns tydligt hur LLC lyckas leverera mer ström i handtaget än den ström som måsteswitchas.
VF
14KV 16KV 18KV 20KV 22KV 24KV 26KV 28KV 30KV
V(Ac) V(Ao) V(As)
0V
100V
200V
300V
Is
Ip
Vc
Figur 7.8 DC-simulering i PSPICE av LLC (luft) och med utsignalerna Vc, Ip och Is.
VF
14KV 16KV 18KV 20KV 22KV 24KV 26KV 28KV 30KV
V(Ac) V(Ao) V(As)
0V
50V
100V
150V
Vc
Ip
Is
Figur 7.9 DC-simulering i PSPICE av LLC (järn) och med utsignalerna Vc, Ip och Is.

- 53 -
I figur 7.9 visas resultatet från en DC-simulering med handtaget mot järn och man sertydligt hur resonansfrekvensen har minskat och det lägre Q-värdet gör att kurvornaplattas till. I tabell 7.2 kollas samma arbetspunkter som i tabell 7.1, men nu förhandtaget mot järn. Det som har hänt är att resonansfrekvensen har kommit långt bortfrån switchfrekvensen, vilket leder till mindre utsignaler. Förutom detta har det lägre Q-värdet medfört ett omvänt förhållande mellan strömmarna, nu har switchströmmenblivit högre än strömmen igenom handtaget. Det här leder till extra switchförluster ochdärmed lägre verkningsgrad.
Tabell 7.1 Uppmätta värden från DC-simulering i PSPICE av LLC (luft).
fs [Hz] Vc [V] Ip [A] Is [A]
21300 219,8 46,2 19,222300 111,7 22,4 12,223300 67,8 13,0 8,9
Tabell 7.2 Uppmätta värden från DC-simulering i PSPICE av LLC (järn).
fs [Hz] Vc [V] Ip [A] Is [A]
21300 55,9 8,0 8,822300 42,8 5,9 7,523300 34,2 4,5 6,7
I figur 7.10 har en transientanalys utförts med värden för handtaget i luft och vid treolika arbetspunkter: 21.3 kHz, 22.3 kHz och 23.3 kHz. Steget som utförs är en sänkning av frekvensen med 100 Hz vid 4.0 ms och sedan tillbaks igen vid 6.0 ms. Den signalsom presenteras är spänningen över kondensatorn. Stegsvaren blir mycket beroende avvart arbetspunkten ligger och detta visar hur olinjärt systemet är. Vid 21.3 kHz, som ärfrekvensen närmast resonansfrekvensen, blir dynamiken som om det vore ett förstaordningens system. Ökas frekvensen till 23.3 kHz, ser man hur systemet övergår till ettmera typiskt andra ordningens system. Förstärkningen på utsignalen skiljer sig ocksåmycket mellan de tre arbetspunkterna.
Time
2.0ms 3.0ms 4.0ms 5.0ms 6.0ms 7.0ms 8.0ms
V(Ac)@1-206.681 V(Ac)@2-105.315 V(Ac)@3-65.104
-5V
0V
5V
10V
15V
f = 23300 Hz
f = 21300 Hz
f = 22300 Hz
Figur 7.10 Transientanalys i PSPICE på LLC (luft) och vid tre olika arbetspunkter: 21.3kHz, 22.3 kHz, 23.3 kHz. Vid 4ms sänks frekvensen med 100Hz och återgår igen vid 6ms. Den utsignal som presenteras är spänningen över kondensatorn.

- 54 -
I figur 7.11 utförs en AC-simulering vid arbetspunkten 22.3 kHz och där resultatet visar förstärkningen och fasförskjutningen på utsignalen relativt insignalen. Här ser man attfaskurvan börjar vid 180°. Anledningen till det är att arbetsfrekvensen ligger överresonansfrekvensen (ZVS) och där leder en ökning av frekvensen till en minskning påutsignalen. Bandbredden på systemets mäts upp till fB = 2.0 kHz (-3dB).
Frequency
10Hz 100Hz 1.0KHz 10KHz 100KHz 300KHz
P(V(Ac)/ V(F))
0d
-200d
180d
SEL>>
DB(V(Ac)/ V(F))
-200
-100
0
Figur 7.11 AC-simulering i PSPICE på LLC (luft) och vid arbetspunkten 22.3 kHz.
7.5 Resultat från simulering i MatlabBeräkningen av tillståndsmodellen för LLC sker med samma komponentvärden somanvändes vid simuleringen i PSPICE. Matlabkoden under bilaga 12.5 Beräkning avtillståndsmodell används för att få fram matriserna A, B och C i modellen. För att kunna jämföra modellen med simuleringen, används de tre arbetspunkterna (21.3kHz, 22.3kHz och 23.3kHz) även här. I tabell 7.3 visas resultatet vid en beräkning på strömmarna Isoch Ip samt spänningen Vc med handtaget i luft och vid jämvikt. Jämför man dessa medvärdena från simuleringen, som finns i tabell 7.1, ser man att samma resultat harerhållits.
Tabell 7.3 Beräkning i Matlab för tre olika arbetspunkter för LLC (luft).
fs [Hz] Vc [V] Ip [A] Is [A]
21300 219.8042 46.2053 19.161522300 111.7362 22.4430 12.238423300 67.8044 13.0385 8.9098
I figur 7.12 finns resultatet från tre olika stegsvar som liknar de som utfördes i PSPICE, där styrsignalen minskades med 100 Hz vid 4 ms och återgick till arbetsfrekvensen vid6 ms. Den linjäriserade tillståndsmodellen visar sig också stämma bra överens medresultatet från simuleringen i PSPICE, se figur 7.10.
I figur 7.13 visas ett bodediagram för tillståndsmodellen vid arbetspunkten 22.3 kHz. Enjämförelse med simuleringen i PSPICE, se figur 7.11, visar att de stämmer bra överens.

- 55 -
2 3 4 5 6 7 8
x 10-3
0
4
8
12
t [s]
Vc [v]
Stegsvar vid tre olika arbetspunkter fs
fs = 21300 Hz
fs = 22300 Hz
fs = 23300 Hz
Figur 7.12 Simulering av stegsvar på tillståndmodellen i Matlab på LLC (luft) och vid tre olika arbetspunkter: 21.3kHz, 22.3 kHz, 23.3 kHz. Vid 4ms sänks frekvensen med 100Hz och återgår igen vid 6ms. Den utsignal som presenteras är spänningen över kondensatorn.
Bode Diagram
Frequency (Hz)
Ph
as
e (
de
g)
Ma
gn
itu
de
(d
B)
103
104
105
106
-180
-90
0
90
180
-200
-150
-100
-50
0
Figur 7.13 Bodediagram för tillståndsmodellen i Matlab av LLC (luft) och vid arbetspunkten 22.3 kHz.

- 56 -
7.6 SammanfattningResultatet från identifieringen av handtaget påvisar väldigt stora variationer på bådeinduktansen och resistansen när handtaget flyttas mellan olika metaller. Värdena blirockså väldigt strömberoende när handtaget används mot järn.
För att kunna testköra resonansomvandlaren gjordes en dimensionering av LLC därvärdena på komponenterna bestämdes. En simulering på hur resonansfrekvensen ochQ-värdet skulle ändras om handtaget skulle drivas av resonansomvandlaren utfördes.Resultatet visar att arbetspunkten skulle variera väldigt mycket och det visade sig också stämma med verkligheten när systemet testkördes. När handtaget var i luft eller motaluminium stämde de praktiska resultaten bra med de teoretiska. Men mot järn uppstodinstabilitet i resonansen p.g.a. det stora strömberoendet hos handtaget.
Det här leder till två stora problem om handtaget på CH33 skall drivas från enresonansomvandlare av typen LLC.
1. De stora förändringarna i både resistans och induktans när handtaget rör sigmellan luft och järn, vilket är ett normalt förlopp vid användning, leder till stora förändringar i resonansfrekvensen. Detta kan medföra att switchfrekvensenhamnar på fel sida om resonansfrekvensen. Omvandlaren har då växlatarbetsområde från t.ex. ZVS till ZCS, vilket betyder att fasen mellan insignalenoch utsignalen har ändrats med 180°. Vid en eventuell reglering skulle detta vara väldigt svårt att registrera och skulle då kunna leda till instabilitet.
2. När handtaget är mot järn blir Q-värdet väldigt lågt och en förutsättning för eneffektiv drivning med en LLC är ett högt Q-värde.
Simuleringen i PSPICE fungerade väldigt bra och är mycket användbart vid design avresonansomvandlare. Simuleringen går snabbt och ger mycket värdefull information om systemet. Den linjäriserade tillståndsmodellen är användbar vid framtagning avregulatorer för att styra resonansomvandlare av typen LLC.
Tre olika simuleringar har använts för att jämföra resultaten mellan PSPICE ochMatlab. Först gjordes en jämförelse mellan tre olika stationära arbetspunkter. Sedanutfördes ett stegsvar vid varje arbetspunkt och slutligen togs ett bodediagram fram viden arbetspunkt. Samtliga resultat visade sig stämma bra överens med varandra.

- 57 -
8. Slutsatser
Genom en studie av de vanligaste resonansomvandlarna valdes en topologi som kallasför LLC och som är speciellt utformad för att driva induktionsvärmare. Den topologinhar modellerats och simulerats med hjälp av dels ett kretssimuleringsprogram och delsmatlab. Induktionsvärmarens handtag, där magnetfältet genereras, har modellerats föratt kunna få med den i simuleringen. Resultatet visar att handtaget ändrar sinkaraktäristik beroende på vilken metall som ska värmas och storleken på strömmen.Eftersom handtaget ingår i en resonanskrets, ändras karaktäristiken på hela systemet.Slutsatsen blir att det är väldigt svårt att använda en resonansomvandlare (LLC) för attdriva det handtag som induktionsvärmaren använder idag.
I början av kapitel 7.4 Resultat från simulering i PSPICE görs en simulering på hurkaraktäristiken på hela systemet ändras då handtaget flyttas mellan luft och järn. Närhandtaget används mot järn (figur 7.9) ligger resonansfrekvensen runt 18 kHz och enbra arbetsfrekvens skulle kunna ligga på 19 kHz. Om handtaget sedan lyfts upp ochkommer i luft (figur 7.8) skulle det innebära att resonansfrekvensen snabbt flyttas till21 kHz. Den aktuella switchfrekvensen hamnar då på fel sida om resonansfrekvensen. Itabell 7.1-7.2 visas också hur stora variationerna blir på strömmarna och spänningarna i kretsen. Exempelvis ger en arbetsfrekvens på fs=21300 Hz och med handtaget mot järnen ström på Ip=8,0A genom induktionstransformatorn. Då handtaget är i luft ökarströmmen till Ip=46,2A vilket visar hur viktigt det är att ha en snabb reglering för atterhålla en säker drift.
En resonansomvandlare med en resonanskrets som inte ändrar sin karaktäristik underdrift är ett ganska enkelt system att reglera. I figur 7.12 visas stegsvaren från tre olikaarbetspunkter. Där syns att systemet kan liknas vid ett första ordningens system dåswitchfrekvensen ligger väldigt nära resonansfrekvensen. Ökas frekvensen förändrassystemet och blir mer likt ett andra ordningens system med överslängar i stegsvaret.
Ett förslag på fortsatt arbete är att leta efter en bättre konfiguration av resonanskrets som är mindre känslig mot de variationer som uppstår i handtaget. Då skulle regleringen avsystemet bli lättare att utföra och kanske skulle en bättre verkningsgrad kunna erhållas.
I det här arbetet fanns ingen tid för analys av någon lämplig reglering av systemet, menett förslag är att försöka dela upp regleringen i två olika delar. En snabb inre regleringsom övervakar switchningen och ser till att rätt arbetsområde alltid utnyttjas. Sedan kan en långsammare yttre reglering användas för att styra uteffekten till önskad nivå.

- 58 -

- 59 -
9. Referenser
[1] Fairchild Semiconductor; “AN9012 Induction Heating System Topology Review”,www.fairchildsemi.com/an/AN/AN-9012.pdfDatum: 2004-02-16
[2] Ingelstam E.; Rönngren R.; Sjöberg S. (1995); ”TEFYMA Handbok för tekniskfysik, fysik och matematik”, Sjöbergs Bokförlag AB, ISBN 91-87234-13-0
[3] Cheng, David K.; “Field and wave Electromagnetics”, Addison-Welsey,ISBN 0201-52820-7
[4] STMicroelectronics; “AN658 Resonant Converter Topologies”,http://www.st.com/stonline/books/pdf/docs/3712.pdfDatum: 2004-02-19
[5] Hart, Daniel W.; “Introduction to power electronic”, Prentice-Hall,ISBN 0-13-180415-4
[6] Mitsubishi Electric Semiconductor, Datablad för PM75DSA120,http://www.mitsubishichips.com/data/datasheets/power/pdfs/00000129.pdfDatum: 2004-02-19
[7] Espi, J.M.; Dede, E.J.; Ferreres, A.; Garcia, R.; “Steady-state frequency analysis ofthe “LLC” resonant inverter for induction heating”, Power Electronics Congress,1996. Technical Proceedings. CIEP '96., V IEEE International , 14-17 Oct. 1996,Pages: 22 - 28
[8] Glad, Torkel & Ljung, Lennart (1989); “Reglerteknik. Grundläggande teori”, Lund,Studentlitteratur, andra upplagan, ISBN 91-44-17892-1
[9] Zhang, B.; Pong, M.H.; “Dynamic model and small signal analysis based on theextended describing function and Fourier series of a novel AM ZVS direct couplingDC/DC converter”, Power Electronics Specialists Conference, 1997. PESC '97Record., 28th Annual IEEE , Volume: 1 , 22-27 June 1997, Pages:447 - 452 vol.1
[10] Espi, J.M.; Dede, E.J.; Navarro, A.E.; Casans, S.; “The new “controlled sourcesmethod” to synthesise large-signal circuits of resonant inverters”, IndustrialElectronics, 1999. ISIE '99. Proceedings of the IEEE International SymposiumVolume: 2 , 12-16 July 1999, Pages:712 - 717 vol.2

- 60 -

- 61 -
10. Bilagor
10.1 Design av LLC% Kravspecifikation
Vdc = input('Ange inspänning [V]: ');
F = input('Ange frekvens vid maxeffekt [Hz]: ');
Pmax = input('Ange max effekt [W]: ');
R = input('Ange resistansen [ohm]: ');
Ismax = input('Ange max ström genom switcharna [A]: ');
Vcmax = input('Ange max spänning över C [V]: ');
% Beräkning av Steg1
V1 = (4*Vdc) / pi;
% Beräkning av Steg2
if Ismax > (2*Pmax)/V1
str = sprintf('Villkor i Steg2 -> Ok!');
disp(str);
else
str = sprintf('Ismax går ej att uppfylla...');
error('str');
end
% Beräkning av Steg3
Alpha = sqrt(2*Pmax*R)/V1;
% Beräkning av Steg4
Qmin = 1/(Alpha*sqrt(((Ismax*V1)/(2*Pmax))^2-1))
Qmax = Vcmax/(V1*Alpha*(1+Alpha))
if Qmax > Qmin
str = sprintf('Villkor i Steg4 -> Ok!');
disp(str);
else
str = sprintf('Vcmax går ej att uppfylla...');
error(str);
end
% Beräkning av Steg5
Q = input('Ange önskat Q-värde: ');
% Steg6
C = 1/(Q*R*2*pi*F);
Lp = (Q*(Alpha+1)*R)/(2*pi*F);
Ls = Lp/Alpha;
str = sprintf('Ls = %.1f uH',Ls*1e6); disp(str);
str = sprintf('Lp = %.1f uH',Lp*1e6); disp(str);
str = sprintf('C = %.1f nF',C*1e9) ; disp(str);

- 62 -
10.2 Identifiering av R och L% Läser in mätdata från ett oscilloskop där spänningen i steget finns i
% variabeln ”u” och stegsvaret finns i ”y”.
% Samplingstiden anges med ”Ts”.
load(data.mat);
% Skapar tidsaxeln
t=linspace(0,(length(u)-1)*Ts,length(u))';
% Söker efter ymax, y1 och y_inf
[y0max,T0max] = max(y);
[y0min,T0min] = min(y(T0max+1:end));
[y1max,T1max] = max(y(T0max+T0min+1:end));
y_inf = mean(y(end-100:end));
ymax = y0max;
y1 = y1max;
T0 = T0max * Ts;
T1 = (T0max+T0min+T1max) * Ts;
% Beräkning av Steg1
P = T1-T0;
M1 = (ymax - y_inf) / y_inf;
M2 = (y1 - y_inf) / y_inf;
% Beräkning av Steg2
M = M2/M1;
D = sqrt( 1 / (1 + ( (4*pi^2) / (log(M)^2 ) ) ) );
% Beräkning av Steg3
w0 = (2*pi)/(P*sqrt(1-D^2));
% Beräkning av Steg4 där C är ett uppmätt värde
C = 2.243e-6;
L = 1/(C*w0^2)
% Beräkning av Steg5
R = D*sqrt(L/C)

- 63 -
10.3 Beräkning av Irms% Skapar ett lågpassfilter av typen Butterworth med gränsfrekvensen fg
f = 1/Ts;
fg = 100000;
Wn = fg/(f/2);
[B,A] = butter(4,Wn);
% Filtrerar signalen y innan beräkning av strömmen
y = filter(B,A,y);
% Beräkning av strömmen
for n=1:length(y)-1
i(n) = C * ( y(n+1) - y(n) ) / Ts;
end
i(length(y)) = i(length(y)-1);
% Beräknar effektivvärdet på strömmen under perioden P
i_period = i(T0max:T0max+T0min+T1max);
mean_square = sum(i_period.^2) / length(i_period);
Irms = sqrt(mean_square)

- 64 -
10.4 Simulering i PSPICE

- 65 -
********** En simuleringsmodell av LLC *************
.SUBCKT LLC VHF F As Ao Ac Ps Po Pc PARAMS:
+Ls=100e-6, Lp=35.4e-6,
+C=2.2e-6, R=0.43
****************************************************
.PARAM PI 3.141592654
E1 w 0 VALUE= 2*PI*V(F)
****** COS part ******
VH1C 0 101 0V
H1C isc 0 VH1C 1
E1C 102 101 VALUE= V(VHF)*(4/PI)
L1C 102 103 Ls
E2C vcc 103 VALUE= V(iss)*Ls*V(w)
G1C 0 vcc VALUE= V(vcs)*C*V(w)
C1C 0 vcc C
E3C 104 vcc VALUE= V(ios)*Lp*V(w)
L2C 104 105 Lp
R1C 105 106 R
VH2C 106 0 0V
H2C ioc 0 VH2C 1
****** SIN part ******
VH1S 0 202 0V
H1S iss 0 VH1S 1
L1S 202 203 Ls
E2S 203 vcs VALUE= V(isc)*Ls*V(w)
G1S vcs 0 VALUE= V(vcc)*C*V(w)
C1S 0 vcs C
E3S vcs 204 VALUE= V(ioc)*Lp*V(w)
L2S 204 205 Lp
R1S 205 206 R
VH2S 206 0 0V
H2S ios 0 VH2S 1
****** Amplitude calculation ******
EAs As 0 VALUE= SQRT( V(isc)*V(isc) + V(iss)*V(iss) )
EAo Ao 0 VALUE= SQRT( V(ioc)*V(ioc) + V(ios)*V(ios) )
EAc Ac 0 VALUE= SQRT( V(vcc)*V(vcc) + V(vcs)*V(vcs) )
****** Phase calculation ******
Eisc PI_isc 0 TABLE V(isc) = (-10Meg,-1) (-1m,-1) (1m,0) (10Meg,0)
Eioc PI_ioc 0 TABLE V(ioc) = (-10Meg,-1) (-1m,-1) (1m,0) (10Meg,0)
Evcc PI_vcc 0 TABLE V(vcc) = (-10Meg,-1) (-1m,-1) (1m,0) (10Meg,0)
EPs Ps 0 VALUE= ARCTAN( V(iss)/V(isc) ) + V(PI_isc)*PI
EPo Po 0 VALUE= ARCTAN( V(ios)/V(ioc) ) + V(PI_ioc)*PI
EPc Pc 0 VALUE= ARCTAN( V(vcs)/V(vcc) ) + V(PI_vcc)*PI
.ENDS

- 66 -
**** MAIN CIRCUITS ****
VHFmodul 1 0 AC 0V
VHF VHF 1 DC 50V
VFmodule 2 0 AC 100V
;VFmodule 2 0 PULSE(0 100 0 10ns 10ns 4ms 6ms)
VF F 2 22300
X1 VHF F As Ao Ac Ps Po Pc LLC PARAMS:
+L1=100e-6, L2=35.4e-6,
+C=2.2e-6, R=0.43
R1 As 0 1k
R2 Ao 0 1k
R3 Ac 0 1k
R4 Ps 0 1k
R5 Po 0 1k
R6 Pc 0 1k
;.TRAN 1us 8ms 2ms 1us
;.DC VF 15K 30K 100
.AC DEC 100 1 300k
.PROBE
.END

- 67 -
10.5 Beräkning av tillståndsmodellVdc = 50;
F = 22300;
Omega = 2*pi*F;
R = 0.43;
Cap = 2.2e-6;
Ls = 100e-6;
Lp = 35.4e-6;
% Beräkning av arbetspunkten...
A = [ [ 0 -Ls*Omega 0 0 -1 0 ];
[ Ls*Omega 0 0 0 0 -1 ];
[ 0 0 -R -Lp*Omega 1 0 ];
[ 0 0 Lp*Omega -R 0 1 ];
[ 1 0 -1 0 0 -Cap*Omega];
[ 0 1 0 -1 Cap*Omega 0 ] ];
B = [ -(4/pi)*Vdc 0 0 0 0 0 ]';
X = A\B;
Isc = X(1); Iss = X(2); Is = sqrt(Isc^2 + Iss^2)
Ipc = X(3); Ips = X(4); Ip = sqrt(Ipc^2 + Ips^2)
Vcc = X(5); Vcs = X(6); Vc = sqrt(Vcc^2 + Vcs^2)
clear A B
% Ställer upp matriserna för den linjäriserade modellen...
A = [ [ 0 -Omega 0 0 -1/Ls 0 ];
[ Omega 0 0 0 0 -1/Ls ];
[ 0 0 -R/Lp -Omega 1/Lp 0 ];
[ 0 0 Omega -R/Lp 0 1/Lp ];
[1/Cap 0 -1/Cap 0 0 -Omega ];
[0 1/Cap 0 -1/Cap Omega 0 ] ];
B = [ [4/(pi*Ls) -Iss];
[0 Isc];
[0 -Ips];
[0 Ipc];
[0 -Vcs];
[0 Vcc] ];
C11 = Isc/sqrt(Isc^2+Iss^2); C12 = Iss/sqrt(Isc^2+Iss^2);
C23 = Ipc/sqrt(Ipc^2+Ips^2); C24 = Ips/sqrt(Ipc^2+Ips^2);
C35 = Vcc/sqrt(Vcc^2+Vcs^2); C36 = Vcs/sqrt(Vcc^2+Vcs^2);
C = [ [C11 C12 0 0 0 0 ];
[0 0 C23 C24 0 0 ];
[0 0 0 0 C35 C36 ] ];
G = ss(A,B,C,0);
% Simulering av ett stegsvar
t = linspace(2e-3,8e-3,6000);
u(1:2000) = 0; u(2001:4000) = -2*pi*100; u(4001:6000) = 0;
y = lsim(G(3,2),u,t);
plot(t,y);

- 68 -
10.6 Schema på prototypkortet