sieve bootstrap unit root tests - mcgill...
TRANSCRIPT

Sieve Bootstrap Unit Root Tests
Patrick Richard Department of Economies
McGill University
Montréal
A thesis submitted to McGill University
in partial fulfillment of the requirements of the degree of Doctor of Philosophy
June 2007
@Patrick Riehard, 2007

1+1 Libraryand Archives Canada
Bibliothèque et Archives Canada
Published Heritage Branch
Direction du Patrimoine de l'édition
395 Wellington Street Ottawa ON K1A ON4 Canada
395, rue Wellington Ottawa ON K1A ON4 Canada
NOTICE: The author has granted a nonexclusive license allowing Library and Archives Canada to reproduce, publish, archive, preserve, conserve, communicate to the public by telecommunication or on the Internet, loan, distribute and sell theses worldwide, for commercial or noncommercial purposes, in microform, paper, electranic and/or any other formats.
The author retains copyright ownership and moral rights in this thesis. Neither the thesis nor substantial extracts from it may be printed or otherwise reproduced without the author's permission.
ln compliance with the Canadian Privacy Act some supporting forms may have been removed from this thesis.
While these forms may be included in the document page count, their removal does not represent any loss of content fram the thesis.
• •• Canada
AVIS:
Your file Votre référence ISBN: 978-0-494-38635-4 Our file Notre référence ISBN: 978-0-494-38635-4
L'auteur a accordé une licence non exclusive permettant à la Bibliothèque et Archives Canada de reproduire, publier, archiver, sauvegarder, conserver, transmettre au public par télécommunication ou par l'Internet, prêter, distribuer et vendre des thèses partout dans le monde, à des fins commerciales ou autres, sur support microforme, papier, électronique eUou autres formats.
L'auteur conserve la propriété du droit d'auteur et des droits moraux qui protège cette thèse. Ni la thèse ni des extraits substantiels de celle-ci ne doivent être imprimés ou autrement reproduits sans son autorisation.
Conformément à la loi canadienne sur la protection de la vie privée, quelques formulaires secondaires ont été enlevés de cette thèse.
Bien que ces formulaires aient inclus dans la pagination, il n'y aura aucun contenu manquant.

2

Abstmct
We consider the use of a sieve bootstrap based on moving average (MA) and au
toregressive moving average (ARMA) approximations to test the unit root hypothesis
when the true Data Generating Pro cess (DGP) is a generallinear process. We provide
invariance principles for these bootstrap DGPs and we prove that the resulting ADF
tests are asymptotically valid. Our simulations indicate that these tests sometimes
outperform those based on the usual autoregressive (AR) sieve bootstrap. We study
the reasons for the failure of the AR sieve bootstrap tests and propose sorne solutions,
including a modified version of the fast double bootstrap.
We also argue that using biased estimators to build bootstrap DGPs may result in
less accurate inference. Sorne simulations confirm this in the case of ADF tests. We
show that one can use the GLS transformation matrix to obtain equations that can be
used to estimate bias in general ARMA(p,q) models. We compare the resulting bias
reduced estimator to a widely used bootstrap based bias corrected estimator. Our
simulations indicate that the former has better finite sample properties then the latter
in the case of MA models. Finally, our simulations show that using bias corrected or
bias reduced estimators to build bootstrap DGP sometimes provides accuracy gains.
3

Résumé
Nous étudions l'application du bootstrap aux tests de racine unitaire lorsque
le processus générateur de données (PDG) est infiniment corrélé. Nous proposons
l'utilisation du bootstrap de type sieve basé sur des modèles approximatifs des types
moyenne mobile et autorégressifs-moyenne mobile. Nous prouvons l'existence de
théorèmes de la limite centrale fonctionnels s'appliquant à ces PGD bootstraps. Nous
démontrons également que les tests de racine unitaire ADF basés sur ces PGD boot
straps sont asymptotiquement valides. Nos simulations indiquent que ces tests sont
parfois plus précis que ceux utilisant le bootstrap sieve autorégressif. L'examen des
causes de ce phénomène nous amène à proposer quelques solutions, incluant une forme
modifiée du bootstrap double rapide.
Nous remarquons aussi que la construction de PGD bootstraps à l'aide d'estimateurs
biaisés affecte négativement la précision des tests. Nous démontrons qu'il est possible
d'utiliser la matrice de transformation des moindres carrés généralisés pour obtenir des
équations permettant d'estimer le biais d'un estimateur des paramètres d'un modèle
ARMA(p,q). Nos simulations indiquent que cette méthode de correction de biais
est plus précise qu'une méthode populaire basée sur le bootstrap dans le cas des
modèles de moyenne mobile. Finalement, nous simulations indiquent que l'utilisation
d'estimateurs corrigés pour le biais dans la construction des PGD bootstraps résulte
parfois en des tests plus précis
4

Aknowledgement
1 am particularly indebted to my thesis supervisor, professor Russell Davidson, for
numerous helpful, as weIl as enjoyable, discussions. 1 also thank professors John Gal
braith and Victoria Zinde-Walsh for their help at different stages of the preparation
of this thesis. The comments of professors Nikolai Gospodinov, Jennifer Hunt, James
MacKinnon, Mary MacKinnon Alex Maynard, Daniel Parent and David Stephens as
weIl as those of M. Christ os Ntantamis and seminar participants at the 2006 Canadian
economics association meeting and second annual CIREQ Ph.D. student conference
were also greatly appreciated.
5

Table of Contents
Chapter 1. General Introduction ....................................... 8
1.1. Introduction ......................................................................... 8
1.2. Unit Root Tests ................................................................... 10
1.3. The Bootstrap ..................................................................... 11
1.4. Bootstrap Unit Root Tests .................................................. 20
1.4. ARMA Sieve Bootstrap ....................................................... 21
1.6. Bootstrap and Bias Correction ............................................ 22
1.7. Conclusion ........................................................................... 22
Chapter 2. Invariance Principle and Validity of Sieve Bootstrap ADF Tests .................................................................................. 23
2.1. Introduction ......................................................................... 23
2.2. General Bootstrap Invariance Principle ............................... 24
2.3. Invariance Principle for MA Sieve Bootstrap ....................... 27
2.4. Invariance Principle for ARMA Sieve Bootstrap .................. 32
2.5. Asymptotic Validity of MASB and ARMASB ADF tests .... 35
2.6. Conclusion ............................................................................ 41
Chapter 3. Simulations ...................................................... 42
3.1. Introduction ......................................................................... 42
3.2. Methodological Issues .......................................................... 45
3.3. Simulations .......................................................................... 49
3.4. Correlation of the Error Terms ............................................ 83
3.5. A Modified Fast Double Bootstrap ...................................... 92
3.6. Conclusion ............................................................................ 99
6

Chapter 4. Bias Correction and Bias Reduction ................ 101
4.1. Introduction .......................................................................... 101
4.2. Bootstrap Bias Correction Methods ..................................... 103
4.3. The GLS Bias Reduction ..................................................... 106
4.4. Simulations ........................................................................... 117
4.5. Unit Root Tests in the Finite Correlation Case ................... 131
4.6. Infinite autocorrelation ......................................................... 138
4.7. Conclusion ............................................................................ 146
Chapter 5. Conclusion ........................................................ 148
References ........................................................................... 151
Appendix: Mathematical Proofs ......................................... 159
7

Chapter 1
General Introduction
1.1 Introduction
This thesis considers the application of bootstrap methods to Augmented Dickey
Fuller (ADF) unit root tests. It is a very well documented fact that ADF tests based
on the asymptotic Dickey Fuller distribution suffer from severe error in rejection
probability (ERP) under the null hypothesis when the underlying pro cess is a general
linear pro cess. While the bootstrap has proved to be a very effective method to reduce
ERP, its application in such cases is not at aIl straightforward because it is impossible
to generate bootstrap samples having the same autocorrelation characteristics as the
original data. Among aIl possible methods that have been devised to circumvent this
difficulty is one called the sieve bootstrap, where one approximates the true, infinite
order, pro cess using a finite or der model. It has been shown that allowing the or der
of the approximating model to increase to infinity at an appropriate rate function
of the sample size in sures the consistency of the inference based on this. Although
several time series models are available as potential sieves, only autoregressive (AR)
ones have been considered in the literature thus far.
8

We propose the use of a sieve bootstrap based on moving average (MA) and autore
gressive moving average (ARMA) approximations. We derive invariance principles
that can be applied to the partial sum pro cesses built from bootstrap samples thus
generated, and show that ADF tests based on these methods are asymptotically valid.
We argue that one reason for the bad performances of bootsttrap AR sieve ADF tests
is that the AR sieve bootstrap method fails to reproduce the dependence structure
present in the residuals of the original ADF test regression and provide compelling
evidence to that effect. Using this finding, we introduce a simple modification that
greatly improves finite sample performances of these tests. We also propose a mod
ified version of the fast double bootstrap, which sometimes provides an additional
accuracy gain.
Further, we argue that bootstrap tests may be inaccurate when they are based
on biased estimators of the true DGP. Simulation evidence to that effect is provided
in the case of unit root models driven MA and AR first differences. In an effort to
solve this problem, we introduce a novel bias correction method based on an exact
analytical form of the GLS transformation matrix. This method is shown to belong
to the family of analytical indirect inference methods for MA and ARMA models.
We use simulations to compare it to a weIl known and widely used bootstrap bias
correction technique. Our simulations show that using bias corrected bootstrap DGPs
to conduct ADF tests often allows for a rejection probability doser to the nominal
level.
This thesis is organized as follows. The rest of the present chapter provides a
short introduction to unit root testing and problems related to it. It also discusses
the principles of bootstrap inference and describes methods that are weIl suited for the
analysis of data generated by generallinear pro cess and their applications to unit root
tests. In chapter 2, we derive invariance princip les for partial sum pro cesses built from
MA and ARMA sieve bootstrap samples. These results are then used to prove that
ADF tests based on these sieve bootstraps are asymptotically valid. The finite sample
9

properties of these tests are explored through simulation experiments in chapter 3.
Simulations are also used to identify the causes of the relative performances of different
sieve bootstrap methods and to propose some solutions. Chapter 4 discusses bias
correction for the parameters of ARMA(p,q) models and introduces the GLS based
bias correction method. Simulations are used to investigate the relative performances
of several bias correction procedures and the utility of using them to build bootstrap
DGPs. Chapter 5 concludes.
1. 2 Unit Root tests
Consider a vector y of time series observations generated by an unknown DGP. The
simplest possible manner of testing whether these observations result from a unit root
process is to test the null hypothesis Ho : (3=0 in the simple regression of ~Yt on Yt-l:
~Yt = (3Yt-l + Ut· (1.1 )
Evidently, the null hypothesis corresponds to the case where Yt is a unit root process,
that is, Yt = Yt-l + Ut. Most unit root tests are based on such a null hypothe
sis. However, several tests with stationarity as a null exist. These include the tests
of Kwiatkowski, Phillips, Schmidt and Shin (1992) and Saikkonen and Luukkonen
(1993). We will not discuss these tests here. The simple test described above was
originally proposed by Dickey and Fuller (1979) and is consequently known as the
Dickey-Fuller (DF) test. It is sometimes desirable to add a deterministic part to re
gression (1.1). This usually takes the form of a constant term, a deterministic time
trend or a quadratic time trend. For the sake of simplicity, and because it can be
do ne without any loss of generality, we will ignore these possibilities in most of what
follows.
Because our goal is to test for the stationarity of Yt, the null hypothesis Ho is
tested against the one-sided alternative Hl : (3 <O. Consequently, the DF test can
10

be carried out at nominal level ct by computing a simple t-statistic and comparing
it to the le ft tail ct level critical value of the proper distribution. Under the nulI, Yt
is non-stationary and we say that regression (1.1) is unbalanced. It follows that the
t-statistic does not have the standard normal distribution asymptotically when Ho
is true. In order to avoid any confusion, it is usual to calI this statistic T instead of
t, and we henceforth follow this practice. If the UtS are uncorrelated, then Phillips
(1987) has shown that the distribution of T under the null converges to a functional
of Weiner processes: l (W(I)2 - 1)
T =} -::2:.....:..-:.....:..-:.....:..-_-:-=
(J W(r)2dr)1/2 (1.2)
where W is the standard Wiener process. This distribution is commonly referred to
as the Dickey-Fuller (DF) distribution and, although analytical expressions exist (see
Abadir, 1995), its critical values are generally obtained via simulations (see MacKin
non, 1996). As most standard asymptotic results, (1.2) does not require any specifie
assumptions about the distribution of the error terms. It does however require that
they be serially uncorrelated. If this is not the case, then the asymptotic distribution
of T under Ho is function of the dependence structure. In fact, as shown in Phillips
(1987), the limiting distribution of the DF test is
where
and 1 n
(j~ = lim - LE (Ut)2 n-+oo n t=l
where n is the sample size, (j2 is called the variance of the sum of errors and (j~ is simply
the variance of the errors of regression (1.1). Obviously, (j2 = (j~ when the errors in
(1.1) are independent and T therefore follows the DF distribution asymptoticalIy.
11

When the UtS are dependent, (/2 =1= (/~ and the limiting distribution of 7" is not the DF
one.
The Augmented Dickey-Fuller test procedure, proposed by Dickey and Fuller
(1979) and Said and Dickey (1984), was introdueed as a potential solution to the
problems related to the correlation of the errors. It simply consists in replacing re
gression model (1.1) by the more general specification:
k
~Yt = 8Yt-l + L ,e~Yt-e + Ut, e=l
(1.3)
where one can add a constant and a deterministic trend, as required by the data at
hand. The idea of this new test regression is to include as many lags into equation
(1.3) as is neeessary for the errors to be independent. If this is done properly, then
the test statistic 7" of the hypothesis Ho : 8 = 0 against the alternative Hl : 8 < 0
asymptotically follows the distribution DF given in (1.2). In particular, suppose
that ~Yt is a stationary AR(p) process. Then, the test 7" based on equation (1.3)
asymptotically follows the DF distribution for aIl k 2:: p. Notiee however that the
power of the ADF test will be maximized only if k = p sinee any unneeessary lag only
contributes to increase the variance of the estimated parameters.
When ~Yt is an invertible ARMA(p,q) proeess, regression (1.3) does not aIlow,
in finite samples, to obtain errors that are completely uncorrelated. This follows
from the weIl known fact that any invertible MA(q) can be written as an AR(oo)
process. Nevertheless, Said and Dickey (1984) show that the unit root test based
on 7" is asymptotically valid for a finite lag length if k = o(n1/ 3 ). The problem with
such a rule is that it gives no indication on how many lags is enough for a given
finite sample size and a given DGP. Sinee the correlation structure of the errors of
equation (1.3) depends on the parameters of the ARMA(p,q) DGP of /).Yt, it would
seem sensible that a good finite sam pIe rule should be sensitive to different values of
the parameters in the MA part of the proeess. On the other hand, sinee the inclusion
of one too many parameter in the regression leads to a loss of power and that this
12

loss of power is function of the sample size, it is necessary that a good selection rule
be also sensitive to sample size.
Ng and Perron (1995, 2001) address this question. Ng and Perron (1995) find
that both the Aikaike and Baysian information criterion (AIC and BIC) choose low
lag orders, thus resulting in high error in rejection probability (ERP) under the null.
They also consider a general to specifie selection method, such as the one studied in
Hall (1994), and find that it yields a higher average lag order than AIC and BIC and,
consequently, lower ERP and power. Finally, Ng and Perron (2001) introduce a novel
way to select k which decreases ERP but decreases power. Ng and Perron (1995)
also suggest that one could try to construct a test regression based on an ARMA(p,q)
process rather than trying to approximate an infinite process with a finite AR model.
Very little attention has been devoted to this approach, which first appeared in the
econometric literature in Said and Dickey (1985). This is undoubtedly due to the fact
that ARMA processes are harder to estimate than AR ones.
Galbraith and Zinde-Walsh (1999) develop this ide a by proposing to estimate equa
tion (1.3) by feasible generalized least squares (FGLS) to take explicit account of the
MA part ofthe DGP of tlYt. Vnder the hypothesis that Yt is an ARIMA(O,l,q), they
fit an MA(q) model to tlYt and use its covariance matrix to obtain FGLS estimates
of the parameters of the usual ADF regression. This last regression is estimated with
a given number of lags k which are used to capture any remaining correlation due
to estimation error of the MA part. Tests based on this FGLS-ADF method have
the correct asymptotic RP for a fixed lag order k instead of k = o(nl/3 ). This cornes
from the fact that the remaining correlation disappears asymptotically because of the
consistency of the MA estimator used in the first step of FGLS estimation. Their sim
ulations suggest that this method results in lower small sample ERP. Their method
can easily be extended to ARFIMA(p,l,q) models.
Instead of trying to parametrically model the dependence structure of the errors
of the DF regression, Phillips (1987) and Phillips and Perron (1988) propose a non-
13

parametric correction of the statistic T computed from regression (1.1). The resulting
statistics, called the Phillips and Perron (PP) test statistic is:
where 8~ and 8 2 are consistent estimators of (]"~ and (]"2 respectively and T is the
ordinary DF statistic. Zt can be shown to follow distribution (1.2) asymptotically.
Evidently, the finite sample accuracy of the PP test is a function of how precisely
(]"2 and (]"~ are estimated. As usual, a consistent and unbiased estimator of (]"~ is
given by (n - 1)-1 L~l û;, where {Ût}f=l is the series of residuals from regression
(1.1). There are several consistent estimators available for (]"2. For example, Perron
and Ng (1996) use kernel estimation based on the sample autocovariance and an
autoregressive spectral density estimator. Unfortunately, a problem similar to that
of selecting a lag or der for the ADF regression is inevitable because any consistent
estimator of (]"2 requires that we set sorne lag truncation or window width.
Several simulation studies have established that PP tests do not perform as weIl
as ADF tests in finite samples, see for example, Schwert (1989) and Perron and Ng
(1996). Therefore, we do not study their properties in this thesis. It is nevertheless
worth noting that a modified form of the PP test introduced by Perron and Ng (1996)
have much better finite sample characteristics than the original version.
Unit root testing has been one of the most active fields in econometrics in the last
three decades. There is consequently a huge literature on this topic. We have only
provided an extremely restricted introduction to it. For example, we have completely
ignored the very important problem of power against nearly integrated or fraction
ally integrated alternatives. Sorne interesting surveys are Maddala and Kim (1998),
Hayashi (2000) and Bierens (2001).
14

1.3 The Bootstrap
Let y be a vector of random variables generated by a DGP, which we denote by 1-",
belonging to a given model M. Let 7(Y) be a statistic computed using the vector y.
For short, we will suppress the dependence on y and denote it by 7. Since 7 depends
on y, its probability distribution depends on that of y and therefore, on the DGP 1-".
Suppose that 7 is used to test a given null hypothesis represented by a set of DGPs
which we will denote by Mo. If the probability distribution of 7 is the same for all
DGPs in Mo, then we say that it is a pivotaI statistic, or that it is a pivot. Similarly,
if its asymptotic distribution is the same for all DGPs in Mo, we say that it is an
asymptotically pivotaI statistic, or that it is an asymptotic pivot. Most commonly
used statistics in econometrics are asymptotic pivots.
Consider a given sample of n observations of y and denote by f the statistics
which is computed using it, so that f is a realisation of 7. Further, assume that f
is asymptotically pivotaI and that its asymptotic cumulative density function (CDF)
under the null hypothesis is F 00 (x). If 7 is a test statistic with which we want to
perform inference, then standard asymptotic theory procedure consists in looking at
the position of f, the numerical value of the statistic computed with the data at hand,
with respect to F 00 (x) and to make a judgment on how probable it is that f is indeed
the result of a drawing from Foo(x). If that probability is lower than a predetermined
nominal level, we reject the null hypothesis.
One problem that arises with test statistics that are only asymptotic pivots is that
their finite sample CDF under the null, which we will denote by F(x), may be very
different from Foo(x) and inference based on this latter may be quite misleading. The
reason for this is that being non-pivotaI implies that f's distribution is function of 1-",
the DGP that actually generated the observations, and is different for different DGPs
in Mo. The ide a of the bootstrap is to approximate F(x) by resampling from an
estimate of 1-" respecting the null, say il E Mo, which we obtain using sorne consistent
15

estimation method.
In the simple case of linear regression models with i.i.d. errors, this is easily
accomplished by estimating a regression model on which we impose the restrictions
corresponding to the null hypothesis. Under standard regularity conditions, this
yields consistent parameter estimation as weIl as a vector of residuals whose limit as
the sample size increases is the vector of error terms. In other words, the residuals
are consistent estimators of the error terms. It therefore follows that the empirical
density function (EDF) of the residuals is a consistent estimator of the CDF of the
error terms. Rence, bootstrap samples of the dependent variable with characteristics
belonging to the null hypothesis can be created by drawing from p, the DGP built
from the estimated linear model and the residuals' EDF. For each such sample, a
bootstrap test statistic, Tj, can be computed. The EDF of these bootstrap statistics
can be shown to be a consistent estimator of the actual test distribution under very
weak conditions. It can also be shown that tests conducted using the bootstrap
benefit from asymptotic refinements over their asymptotic counter-parts. This means
that their finite sample error decreases faster as a function of the sample size. Rence,
bootstrap tests can be expected to be more accurate than asymptotic tests in finite
samples. This is also true for confidence intervals.
The existence of these refinements depends on the ability of the bootstrap DG P
to correctly replicate the features of the true DGP. This means that resampling the
residuals as if they were i.i.d. may not always be appropriate. For example, if
the original errors are heteroskedastic, it is important that the bootstrap errors also
be heteroskedastic. This apparently simple requirement necessitates the utilization
of more elaborate bootstrap schemes such as the wild bootstrap of Davidson and
Flachaire (2001).
Similarly, whenever the errors of the original model are serially correlated, it is
necessary that the bootstrap error terms be correlated in a similar fashion. A partic
ularly challenging situation occurs when the errors are generated by a generallinear
16

process. lndeed, sinee it is impossible to correctly model such a dependence using a
finite number of observations, the bootstrap DGP will invariably be different from
the true DGP. It is nevertheless possible to obtain sorne asymptotic refinements by
using more sophisticated bootstrap methods that are specifically designed to handle
such cases. The next two subsections introduee the two most popular such methods.
1.3.1 The block bootstrap
The block bootstrap is a non-parametric resampling method whereby one builds boot
strap samples by putting together blocks of observations drawn at random, with
replacement, instead of single observations. By doing this, one makes sure that what
ever correlation structure exists in the original sample is preserved perfectly intact
within each block. This has the obvious advantage of not requiring any parametric
estimation (nor any knowledge) of the true process. On the other hand, bootstrap
samples built in such a way have a discontinuous correlation structure between each
blocks (the join point problem) as weIl as more variable moments than what would
be obtained with an iid bootstrap.
The former problem cornes from the fact that the last observation of any given
block is not properly correlated with the first observation of the following block. Thus
bootstrap samples fail to exactly replicate the original data's correlation structure.
However, this problem goes away as the sample size in creas es and the block size is
allowed to go to infinity. Nevertheless, it can be shown that the block bootstrap
provides sm aller asymptotic refinements than the iid bootstrap would if we could
correctly model the correlation.
Andrews (2004) proposes a method called the block-block bootstrap which is de
signed to provide asymptotic refinements that tend to what one obtains with the
iid bootstrap. In short, it consists of calculating the test statistic over the original
sample from which sorne observations have been deleted and replaeed by zeros. This
17
effectively introduces in the original sample the same kind of discontinuities that
are inevitable in the bootstrap sample. Paparoditis and Politis (2001, 2002) also
introduced a method to reduce the join point problem, which they call the tapered
bootstrap. This consists of putting less weight on the observations located at the end
of each blocks. They show that this method has better asymptotic refinements than
the simple block bootstrap.
The latter problem with the block bootstrap, the variability of the moments, cornes
from the fact that there are always fewer blocks than observations. This means that
the bootstrap samples are created by drawing from a smaller number of elements.
Thus, the bootstrap sample moments are computed over fewer elements and are
therefore more variable. Hall and Horowitz (1996), in the very general context of
hypothesis testing in GMM estimation with dependent data, suggest rescaling the
test statistics by a factor function of the true variance of the bootstrap data, which
is function of the block length. They show that this allows for a gain in asymptotic
refinements. More recently, Inoue and Shintani (2006) proposed using a similar cor
rection in the G MM criterion function weighting matrix, thus eliminating the need
to correct any subsequent test statistics. Further treatment of this problem may be
found in Hirukawa (2006).
A critical issue for any application of the block bootstrap is the choice of the block
length. Evidently, the larger this is, the smaller is the number of blocks that can be
formed and that must be drawn to construct the bootstrap samples. Consequently,
the join point problem de creas es with the size of the blocks but the variability of the
moments problem increases. Paparoditis and Politis (2003) provide a discussion of
this problem and propose sorne sample based selection methods. The idea is to find
a block size that minimises a criteria such as the accuracy of the estimation of the
distribution function or the accuracy in achieving the nominal coverage of a confidence
interval. The difficulty lies in the fact that the optimal block size depends on unknown
characteristics of the data. Sorne papers propose to estimate these features (Politis
18

and White, 2000 among others) while others suggest avoiding this by the use of non
parametric cross-validation techniques, see Hall, Horowitz and Jing (1995). We shall
not go into further details here.
1.3.2 The sieve bootstrap
One way to avoid the problems associated with the block bootstrap is to use a fi
nite or der parametric approximation of the true dependence structure to generate
bootstrap samples. This method, called the sieve bootstrap was first proposed by
Bühlmann (1997) and further developed by Bühlmann (1998), Choi and Hall (2000)
and Park (2002) among others. Prior to Bühlmann (1997), Kreiss (1992) had consid
ered the possibility of using finite or der AR models to construct bootstrap samples
for AR( (0) models. The sieve bootstrap is based on the fact that any linear and in
vertible time series process can be written in an AR( (0) form. It consists of fitting a
finite order AR(p) model to the data and drawing bootstrap errors from the residuals
as if they were iid. It can be shown that, if we let p go to infinity at a proper rate as
the sample size increases, tests based on the resulting sieve bootstrap samples benefit
from some asymptotic refinements. 80 far, no effort has been made to develop sieve
bootstrap methods based on other models than AR(p) ones.
While it provides us with bootstrap samples with a continuous correlation structure
and does not imply higher variability of the moments, the sieve bootstrap always fails
to replicate the true correlation structure of the data. This may be a particularly bad
problem in small samples where p must be relatively small. In such cases, bootstrap
inferences based on sieves may be just as bad as asymptotic ones. Of course, a similar
critique applies to the block bootstrap. On the other hand, the sieve bootstrap is
incapable of capturing higher moments seriaI dependence, such as GARCH processes,
unless it is specifically modeled. Thus, in this respect, the block bootstrap is superior.
19

1.4 Bootstrap unit root tests
Because standard unit root tests such as the ADF test often have poor finite sample
properties, it is natural to try to use bootstrap methods to obtain more accurate
inferences. Unfortunately, since the ADF regression is unbalanced under the null
hypothesis, none of the theoretical results alluded to above on the asymptotic re
finements provided by the bootstrap ho Ids in this case. In fact, the only theoretical
proof of the existence of bootstrap refinements for ADF tests was devised by Park
(2003). It must be noted however that his results only apply to cases where the first
difference pro cess under the null is a stationary AR(p) with p finite and known. This
is unfortunate because this assumption excludes aIl infinite AR cases, which are the
ones in which the most severe problems are encountered. Nevertheless, several simu
lation studies indicate that block and sieve bootstrap unit root tests often outperform
asymptotic tests in these cases.
Although there is no theoretical proof that they may provide refinements over
asymptotic tests, unit root tests based on sieve and block bootstrap distributions have
some desirable properties. In particular, Park (2002) develops an invariance principle
for partial sum pro cesses built from sieve bootstrap data and uses this results to
show that sieve bootstrap DF tests yield asymptotically valid inference. Further,
Chang and Park (2003) use these results to show that sieve bootstrap ADF tests
are also asymptotically valid under weak regularity conditions. On the other hand,
Paparoditis and Politis (2003) introduce a residual based block bootstrap (RBB)
procedure for unit root testing. This method, which will be described in more details
in chapter 3, is designed to increase the power of the unit root test and to be valid
for a wide variety of models. The authors derive a functional central limit theorem
and show that RBB ADF tests are asymptotically valid. Only a few other papers
consider these issues. Among them is Psaradakis (2001), who studies the properties
of a sieve bootstrap similar to that of Chang and Park (2003), and Swensen (2003),
who studies the properties of unit root tests based on the stationary block bootstrap
20

of Politis and Romano (1994). Both Psaradakis (2001) and Swensen (2003) provide
proofs of the asymptotic validity of the bootstrap tests they consider. The finite
sample performances of ADF tests based on these different methods are investigated
in a detailed Monte Carlo study by Palm, Smeekes and Urbain (2006). According to
them, sieve bootstrap ADF tests have slightly better accuracy than block bootstrap
tests.
1.5 ARMA sieve bootstrap
Although sieve bootstrap tests based on autoregressive approximations often provide
sorne accuracy gains over asymptotic tests, there are circumstances where they per
form very badly. In particular, whenever the true DGP is an ARIMA(p,l,q) with a
large negative MA root, the autoregressive sieve bootstrap (ARSB) ADF test over
rejects almost as much as the asymptotic one. This is, of course, due to the fact
that such MA roots coincide with very strong AR( 00) forms which are difficult to
approximate with a finite order autoregression. Thus, sieve models that explicitly
take MA parts into account may solve this problem at least partially.
It is somewhat surprising that absolutely no effort has been made for the develop
ment of sieve bootstrap methods based on MA and ARMA models. This most likely
depends on the fact that estimating such models requires more effort than is needed
to estimate an AR. However, the apparition of new estimation techniques such as the
analytical indirect inference methods of Galbraith and Zinde-Walsh (1994, 1997), has
changed this. These methods, which de duce parameter estimates for an MA(q) or an
ARMA(p,q) model from a simple AR(k), are simpler and faster to implement than
maximum likelihood. Thus, their development makes moving average sieve boot
strap (MASB) and autoregressive moving average sieve bootstrap (ARMASB) more
practical. We will formally introduce such sieves in the next chapter.
21

1.6 Bootstrap and bias correction
Another reason why the bootstrap may fail to provide accurate inference is estima
tion bias. Indeed, as we mentioned ab ove , one condition for it to work well is that
the bootstrap samples should be able to mimic the original sample's features. This
requires that the parameters of the bootstrap DGP have values close to those of the
original DGP. Rence, bootstrap inference based on biased estimators is likely to be
inaccurate. There exist several bias correction techniques which may be used to ob
tain more precise estimates of the null DGP. In chapter 4, we review sorne of those
that can be applied to time series models and introduce a new bias reduction tech
nique based on the GLS transformation matrix. We then use bias corrected and bias
reduced estimators to build bootstrap samples and carry out unit root tests.
1. 7 Conclusion
ln this chapter, we have introduced the widely used ADF test for the unit root
hypothesis and have pointed out its problems under the null hypothesis when the
data is generated by a general linear process. We have also introduced the basics of
bootstrap testing and described specialized forms of the bootstrap that can be used
in these situations. The asymptotic and finite sam pIe properties of those methods
have been studied by several authors and we have reported their main conclusions.
Among these methods is the sieve bootstrap, which uses finite order AR models to
approximate generallinear processes. We propose to use finite or der MA and ARMA
models instead of AR ones to conduct sieve bootstrap inference.
Bootstrapping unit root tests sometimes yields disappointing results. We argue
that this may be due to the fact that bootstrap DGPs are sometimes based on biased
estimators. We therefore propose to use bias correction and bias reduction methods
to obtain more accurate finite sample inferences.
22

Chapter 2
Invariance Principle and Validity
of Sieve Bootstrap ADF Tests
2.1 Introduction
In this chapter, we der ive the invariance principles necessary to justify the use of MA
sieve bootstrap (MASB) and ARMA sieve bootstrap (ARMASB) samples to carry out
bootstrap unit root hypothesis tests. These results are often referred to as functional
central limit theorems because they extend standard asymptotic distribution theory,
which is applicable to simple random variables, to more complex mathematical objects
such as random functions. For a very accessible introduction to these topics, see
Davidson (2006). We also show that ADF tests based on MASB and ARMASB
samples are asymptotically valid.
Establishing invariance princip le results for sieve bootstrap procedures is a rela
tively new strand in the literature and, at the time of writing this, and to the author's
knowledge, only two attempts have been made. First, Bickel and Bühlmann (1999)
derive a bootstrap functional central limit theorem under a bracketing condition for
23

the AR sieve bootstrap (ARSB). Second, Park (2002) derives an invariance principle
for the ARSB. This latter approach is more interesting for our present purpose be
cause Park (2002) establishes the convergence of the bootstrap partial sum pro cess to
the standard Brownian motion, and most of the unit-root-tests asymptotic theory is
based on such processes. Further, as we will see below, his assumptions are standard
ones in time series econometrics.
We then use these results to show that the ADF bootstrap test based on the MASB
and ARMASB is asymptotically valid. A bootstrap test is said to be asymptotically
valid, or consistent, if it can be shown that its large sample distribution under the
null is the test's asymptotic distribution. Consequently, we will seek to prove that
MASB and ARMASB ADF tests statistics follow the DF distribution asymptotically
under the null.
The present chapter is organised as follows. The next section discusses bootstrap
invariance principles for partial sum pro cesses built from sets of i.i.d. random vari
ables. It is very similar to section 2 in Park (2002) and the results presented there
form the basis of the theory presented here. Section 3 introduces the MASB and
establishes an invariance principle for it. Section 4 introduces the ARMASB and, by
extending the results of section 3 and Park (2002), establishes an invariance princi
pIe. The asymptotic validity of the sieve bootstrap ADF tests is proved in section 5.
Section 6 concludes.
2.2 General bootstrap invariance princip le
Let {êt}r=l be a sequence of iid random variables with finite second moment a 2 .
Consider a sample of size n and define the partial sum process:
1 [nt)
Wn(t)= r,;:;Lêk av n k=l
24

where [y 1 denotes the largest integer smaller or equal to y and t is an index such
that ~ ::s t < *, where j = 1,2, ... n is another index that allows us to divide the
[0,1] interval into n + 1 parts. Thus, Wn(t) is a step function that converges to a
random walk as n -+ 00. AIso, as n -+ 00, Wn(t) becomes infinitely dense on the
[0,1] interval. By the classical Donsker's theorem, we know that
where W is the standard Brownian motion. The Skorohod representation theorem
tells us that there exists a probability space (0, F, P), where 0 is the space containing
aIl possible outcomes, F is a a-field and P a probability measure, that supports W
and a pro cess W~ such that W~ has the same distribution as W n and
W' a.s. W n -+ .
Indeed, as demonstrated by Sakhanenko (1980), W~ can be chosen so that
(2.1)
(2.2)
for any <5 > 0 and r > 2 such that Ejctjr < 00 and where Kr is a constant that
depends on r only. The result (2.2) is often referred to as the strong approximation.
Because the invariance principle we seek to establish is a distributional result, we do
not need to distinguish W n from W~. Consequently, because of equations (2.1) and
(2.2), we say that W n ~ W, which is stronger than the convergence in distribution
implied by Donsker's theorem.
Now, suppose that we can obtain an estimate of {Ct}~=l' which we will denote as
{€t}~=l' from which we can draw bootstrap samples of size n, denoted as {C;}~=l' If
we suppose that n -+ 00, then we can build a bootstrap probability space (0*, F*, P*)
which is conditional on the realization of the set of residuals {€t}~l from which the
bootstrap random variables are drawn. What this means is that each bootstrap draw
ing {C;}r=l can be seen as a realization of a random variable defined on (0*, F*, P*).
In aIl that follows, the expectation with respect to this space (that is, with re
spect to the probability measure P*) will be denoted by E*. For example, if the
25

bootstrap samples are drawn from {(Et - En)} f=l' then E* é; = 0 and E* é;2 = â; =
(lin) L:~1 (Et - En)2. Of course, whenever the EtS are residuals from a linear regres
sion model with a constant, En = 0 so that E*é;2 = â; = (lin) L:~=1 iF. Also, ~, ~ and a~* will be used to denote convergence in distribution, in probability and almost
sure convergence of the functionals of the bootstrap samples defined on (0*, F*, P*).
Further, following Park (2002), for any sequence of bootstrapped statistics {X~} we
say that X~ ~ X a.s. if the condition al distribution of { X~} weakly converges to
that of X a.s. on all sets of {Et}~l' In other words, if the bootstrap convergence in
distribution (~) of functionals of bootstrap samples on (0*, F*, P*) happens almost
surely for all realizations of {tt}~l' then we write ~ a.s.
Let {éa~l be a realization from a bootstrap probability space. Define
1 [nt]
W~(t) = A r,;; L ék' (Jnyn k=l
Once again, by Skorohod's theorem, there exists a probability space on which a
Brownian motion W* is supported and on which there also exists a pro cess W~'
which has the same distribution as W~ and such that
(2.3)
for 8, r and Kr defined as before. Because W~' and W~ are distributionally equivalent,
we will not distinguish them in all that follows. Equation (2.3) allows us to state the
following theorem, which is also theorem 2.2 in Park (2002)
Theorem (Park 2002, theorem 2.2, p. 473) If E*lé;lr < 00 a.s. and
(2.4)
d* for some r > 2, then W~ ----t W a.s. as n ----t 00.
This result comes from the fact that, if condition (2.4) holds, then equation (2.3)
implies convergence in probability over the bootstrap probability space which, as
26

usual, implies convergence in distribution that is, W~ ~ W* a.s. Since the distribu
tion ofW* is independent of the set ofresiduals {€d~u we can equivalently say W~ ~
W a.s. Hence, whenever condition (2.4) is met, the invariance principle follows. In
other words, Skorohod implies that there exists a pro cess W~' distributionaIly equiv
aIent to W~ and Sakhanenko implies that it can be chosen so as to satisfy equation
(2.3). Of course, this theorem is only valid for bootstrap samples drawn from sets
of i.i.d. random variables. Nevertheless, Park (2002) uses it to prove an invariance
princip le for the AR sieve bootstrap. In the next two sections, we do essentiaIly the
same thing for the MA and ARMA sieve bootstraps.
2.3 Invariance principle for MA sieve bootstrap
Let us consider a general linear process:
(2.5)
where 00
7r(z) = L 7rkZk k=O
and the CtS are i.i.d. randorn variables. Moreover, let 7r(z) and Ct satisfy the foIlowing
assurnptions:
Assurnption 2.1.
(a) The Ct are i.i.d. randorn variables such that E(ct)=O and E(lctn< 00 for sorne
r > 4.
(b) 7r(z) =1= 0 for aIl Izl ::; 1 and ~k::O Iklsl7rkl < 00 for sorne s ;::: 1.
These are usual assurnptions in stationary tirne series analysis. Notice that (a)
along with the coefficient surnrnability condition in sures that the pro cess is weakly
stationary. On the other hand, the assurnption that 7r(z) =1= 0 for aIl Izl ::; 1 is
27

neccssary for the process to have an AR( 00) form. See Chang and Park (2003) for a
discussion of these assumptions.
The MASB consists of approximating equation (2.5) by a finite or der MA(q) model:
Ut = 7flêq,t-l + 7f2êq,t-2 + ... + 7fqê q,t-q + êq,t (2.6)
where q is a function of the sample size. We believe that the analytical indirect
inference estimator for MA models introduced by Galbraith and Zinde-Walsh (1994),
henceforth GZW (1994), is the most appropriate one for this task. There are several
reasons for this. The first is computation speed. Consider that in practice, one
often uses information criteria such as the AIC and BIC to choose the order of the
MA sieve model. These criteria make use of the value of the loglikelihood at the
estimated parameters, which implies that, if we want q to be within a certain range,
say ql ::; q ::; q2, then we must estimate q2 - ql models. With maximum likelihood,
this requires us to maximize the log likelihood q2 - ql times. With GZW (1994)'s
method, we need only estimate one model, namely an AR(f) , from which we can
deduce an at once the parameters of an the q2 - ql MA( q) models. We then only need
to evaluate the loglikelihood function at these parameter values and choose the best
model accordingly. This is obviously much faster then maximum likelihood.
Second, the simulations of GZW (1994) indicate that their estimator is more ro
bust to changes in q. For example, suppose that the true model is MA(oo) and that
we consider approximating it by either a MA(q) or a MA(q + 1) model. If we use
the GZW (1994) method, for fixed J, going from a MA(q) to a MA(q + 1) specifi
cation does not alter the values of the first q coefficients. On the other hand, these
q estimates are likely to change very much if the two models are estimated by max
imum likelihood, because this latter method strongly depends on the specification.
Therefore, bootstrap samples generated from parameters estimated using the GZW
estimator are likely to be more robust to the choice of q than samples generated using
maximum likelihood estimates.
28

Another reason to prefer GZW (1994)'s estimator is that, according to their sim
ulations, it tends to yield fewer non-invertible roots, which are not at aIl desirable
here. FinaIly, it allows us to determine, through simulations, which sieve bootstrap
method yields more precise inference for a given quantity of information (that is, for
a given lag length).
Approximating an infinite order linear pro cess by a finite dimension model is an
old topic in econometrics. Most of the time, finite f -order autoregressions are used,
with f increasing as a function of the sample size. The classical reference on the
subject is Berk (1974) who proposes to increase f so that P /n --+ 0 as n --+ 00 (that
is, f = o( n 1/3)). This assumption is quite restrictive because it do es not allow f to
increase at the logarithmic rate, which is what happens if we use AIC or BIC. Here,
we make the following assumption about q and f:
Assumption 2.2.
Let q and f be, respectively, the orders of the approximating MA sieve model and
of the AR model used to estimate it via analytical indirect inference. Then, we
assume that q --+ 00 and f --+ 00 as n --+ 00 and q = a ((n/log (n))1/2) and f =
a ((n/log (n) )1/2) with f > q.
The reason for this choice is closely related to lemma 3.1 in Park (2002) and the
reader is referred to the discussion following it. Here, we limit ourselves to pointing
out that this rate is consistent with both AIC and BIC, which are commonly used
in practice. The restriction that f > q is necessary for the computation of the GZW
(1994) estimator.
The bootstrap samples are generated from the DGP:
(2.7)
where the 7rq ,i, i = 1,2, ... q are estimates of the true parameters 1fi, i = 1,2, ... and the
ct are drawn from the EDF of (tt-tn ), that is, from the EDF of the centered residuals
29

of the MA(q) sicvc. We will now cstablish an invariance princip le for the partial sum
pro cess of u; by considering its Beveridge-Nelson decomposition and showing that it
converges almost surely to the same limit as the corresponding partial sum pro cess
built with the original Ut. First, consider the decomposition of Ut:
where
and
00
Ut = L 7rkCt-k k=O
00
7rk = L 7ri· i=k+1
N ow, consider the partial sum process
1 [nt] 1 [nt] 00 [( 00 ) 1 = ;;:; L 7r(1)ct + ;;:; L L L 7ri (Ct-k-l - Ct-k)
V n k=l V n k=l k=O i=k+l
hence,
V n ( t) = (a7r (1) ) W n (t) + Jn (uo - U[nt]).
Under assumption 2.1, Phillips and Solo (1992) show that
Therefore, applying the continuous mapping theorem, we have
On the other hand, from equation (2.7), we see that u; can be decomposed as
where q
7T(1) = 1 + L 7Tq ,k
k=l
30

It therefore follows that we can write:
V*(t) 1 ~ * (A A (l))W* 1 (-* -*) n = r;;; L..J Ut = O'n7rn n + r;;; ua - u[nt] yn k=l yn
d* In or der to establish the invariance principle, we must show that V~ ---t V =
(O'7f(l))Wa.s. To do this, we need 3 lemmas. The first one shows that Ô"n and 7rn (l) d*
converge almost surely to 0' and 7f(1). The second demonstrates that W~(t) ---t W
a.s. Finally, the last one shows that
Pr*{ max In-1/ 2u*1 > c5} ~ 0
l::;t::;n t
for all c5 > 0, which is equivalent to saying that
max In- 1/
2ukl ~ o. a.s. l::;k::;n
(2.8)
and is therefore the bootstrap equivalent of the result of Philips and Solo (1992).
These 31emmas are closely related to the results of Park (2002) and their counterparts
in this paper are identified for reference.
Lemma 2.1 (Park 2002, lemma 3.1, p. 476)
Let assumptions 2.1 and 2.2 hold. Then,
for large n
Ô"~ = 0'2 + 0(1) a.s.
7rn (l) = 7f(1) + 0(1) a.s.
Proof: see the appendix.
31
(2.9)
(2.10)
(2.11)

Lemma 2.2 (Park 2002, lem ma 3.2, p. 477).
L t t · 2 1 d 2 2 h Id Th E*I *Ir and n1- rj2 E*lc*t Ir ~. 0 e assump IOns . an . o. en, Et < 00 a.s. ç,
Proof: see the appendix.
d* Lemma 2.2 proves that W~(t) --t Wa.s. because it shows that condition (2.4) holds
almost surely.
Lemma 2.3 (Park 2002, theorem 3.3, p. 478).
Let assumptions 2.1 and 2.2 hold. Then, equation (2.8) holds.
Proof: see the appendix.
With these 3 lemmas, the MA sieve bootstrap invariance principle is established.
It is formalized in the next theorem.
Theorem 2.1.
Let assumptions 2.1 and 2.2 hoid. Then by Iemmas 2.1, 2.2 and 2.3,
d* V~ --t V = (O"7r(l))W a.s.
2.4 Invariance principle for ARMA sieve bootstrap
We now establish an invariance principle for the ARMASB. It turns out to be a simple
matter of combining the results of the previous section to those of Park (2002). The
ARMASB procedure consists of approximating the above generallinear process (2.5)
by a finite or der ARMA(p,q) model:
(2.12)
32

where.e = p+q denotes the total number of parameters and is, of course, a function of
the sample size. As before, and for similar reasons, we propose that the parameters be
estimated using an analytical indirect inference method suit able for ARMA models.
Such a method has been proposed by Galbraith and Zinde-Walsh (1997). Rence, in
addition to p and q, we must also specify the or der of the approximating autoregression
from which the ARMA parameter estimates are deduced. As before, we let f denote
this order. Then, we make the following assumptions:
Assumption 2.3
Both.e and f go to infinity at the rate 0 ((njlog(n))1/2) and f > .e.
Notice that we do not require that both p and q go to infinity simultaneously. Rather,
we require that their sum does. Thus, the results that follow ho Id even if p or q is
held fixed while the sam pIe size increases, as long as the sum increases at the proper
rate. As before, the restriction that f > .e is required for the GZW (1997) estimator
to be consistent. The bootstrap samples are generated from the DGP:
(2.13)
where the âe,k and 1re,k can be combined using analytical indirect inference equations
to form consistent estimates of the true parameters of either the infinite order AR
or MA representation of u; and the c; are drawn from the EDF of (Êt - gn)~=l' that
is, from the empirical distribution of the centered residuals of the fitted ARMA(p,q).
N ext, we need to build a partial sum pro cess V~ of u;. The easiest way to do this
is to consider either the AR( (0) or the MA( (0) form of the ARMA(p,q) model and
build V~ based on this representation. Let us consider the MA( (0) form of u;, which
we define as
(2.14)
33

where êe 1 = ire 1 + tic 1, êe 2 = êe l tie 1 - tic 2 - ire 2 and so forth. Then, , , , , " , ,
V*(t) 1 ~ * (A (}A (1))W* 1 (-* -*) n =. r;;; L.J Ut = (}n n n + r;;; U o - u[nt] yn k=1 yn
(2.15)
where
and 00
Bk = L êi .
i=k+l
and where Ô"n is the estimated variance of the residuals of the ARMA(p,q) sieve. Then,
we need to show that V~(t) ~V a.s. This, as before, can be done through proving 3
results, which are simple corollaries of lemmas 2.1, 2.2 and 2.3 of the present chapter
and lemmas 3.1 and 3.2 as well as theorem 3.3 of Park (2002). Recall that 7rk denotes
the k th parameter of the true MA( 00) form of the process Ut.
Corollary 2.1.
Under assumptions 2.1 and 2.3,
for large n. Also,
Proof: see appendix.
Corollary 2.2.
max lêCk - 7rkl = 0 (1) a.s. l::ç;kg ,
Ô"~ = (}2 + 0(1) a.s.
ên (1) = 7r(1) + 0(1) a.s.
(2.16)
(2.17)
(2.18)
Under assumptions 2.1 and 2.3, the ARMA sieve bootstrap errors' partial sum
process converges in distribution to the standard Wiener pro cess almost surely over
all bootstrap samples as n goes to infinity:
d* W~ -+ Wa.s.
34

Proof: see appendix.
Corollary 2.3
Under assumptions 2.1 and 2.3,
for an 6 > 0 and u; generated from the ARMA(p,q) sieve bootstrap DGP.
Proof: see appendix.
These three results are sufficient to prove the invariance princip le of the ARMA
sieve bootstrap partial sum pro cess. This is formalized in the next theorem.
Theorem 2.2 Let assumptions 2.1, 2.2 and 2.3 hold. Then by corollaries 2.1, 2.2
and 2.3,
d* V~ -t V = (0"7r(l))W a.s.
2.5 Asymptotic Validity of MASB and ARMASB ADF tests
Consider a time series Yt with the following DGP:
Yt = exYt-l + Ut (2.19)
where Ut is the general linear pro cess described in equation (2.5). We want to test
the unit foot hypothesis against the stationarity alternative (that is, Ho : ex = 1
against Hl : ex < 1). This test is frequently conducted as a t-test in the so called
ADF regression, first proposed by Said and Dickey (1984):
p
Yt = exYt-l + L exkL:lYt-k + ep,t k=l
35
(2.20)

where p is chosen as a function of the sample size. A large literature has been
devoted to selecting p, see for example, Ng and Perron (1995, 2001). As noted in
the introduction, deterministic parts such as a constant and a time trend are usually
added to the regressors of (2.20). Chang and Park (CP) (2003) have shown that the
test based on this regression asymptotically follows the DF distribution when Ho is
true under very weak conditions, including assumptions 2.1 and 2.2. Let yt denote
the bootstrap pro cess generated by the following DGP: t
* ""' * Yt = L..J uk k=l
and the ut = !lyt are generated as in (2.7). The bootstrap ADF regression equivalent
to regression (2.20) is p
yt = ayt-l + L ak!lyt_k + et· (2.21) k=l
Let us suppose for a moment that !lyt has been generated by an AR(p) sieve
bootstrap DGP: p
!lyt = L âp,k!lyt_k + ct k=l
Then, letting a = 1 in (2.21), we see that the true parameters of this equation are
the âp,kS and that its the errors are identical to the errors driving the bootstrap DGP.
This is a convenient fact which CP (2003) use to prove the consistency of the ARSB
ADF test based on this regression. If however the yt are generated by the MA(q)
or ARMA(p,q) sieves described ab ove , then the errors of regression (2.21) are not
identical to the bootstrap errors under the null because the AR(p) approximation
captures only a part of the correlation structure present in the MA(q) or ARMA(p,q)
process. It is nevertheless possible to show that they will be equivalent asymptotically,
that is, that c; = et + 0(1) a.s. This is done in lemma Al, which can be found in the
appendix.
Let X;,t = (!lyt-l' !lyt-2' ... , !lyt_p) and define:
(t X;,tX;,t T) -1 (t X;,t C;) t=l t=l
n ( n ) * * * * *T An = LYt-lCt - LYt-lXp,t t=l t=l
36

B~ = t Y:-1 2 - (t Y:-1 X;,t T) (t X;,tX;,t T) -1 (t X;,tY:-1) t=l t=l t=l t=l
Notice that A~ is defined as a function of é;, not et. Then, it is easy to see that the
t-statistic computed from regression (2.21) can be written as:
* â~ - 1 () Tn = (A) + 0 1 a.s.
s a~
for large n and where â~ - 1 = A~B~-l and s(â~)2 = â;B~-l.
The equality is asymptotic and almost surely holds because the residuals of the ADF
regression are asymptotically equal to the bootstrap errors, as shown in lemma Al.
This also justifies the use of the estimated variance â;. Note that in small samples,
it may be preferable to use the estimated variance of the residuals from the ADF
regression, which is indeed what we do in the simulations. We must now address the
issue of how fast p is to increase. For the ADF regression, Said and Dickey (1984)
require that p = o(nk ) for sorne 0 < k ::; 1/3. But, as argued by CP (2003), these
rates do not allow the logarithmic rate. Hence, we state new assumptions about the
rate at which q, g and p (the ADF regression order) increase:
Assumption 2.2.'
q = cqnk, g = ccnk p = cpnk where cq, Cc and cp are constants and l/rs < k < 1/2.
Assumptions 2.2 and 2.3 can be fitted into this assumption for appropriate values
of k. AIso, notice that assumption 2.2' imposes a lower bound on the growth rate of
p, g and q. This is necessary to obtain almost sure convergence. See CP (2003) for
a weaker assumption that allows for convergence in probability. Several preliminary
and quite technical results are necessary to prove that the bootstrap test based on the
statistic T~ is consistent. To avoid rendering the present exposition more laborious
than it needs to be, we relegate them to the appendix (lemmas A2 to A5). For now,
let it be sufficient to say that they extend to the MA and ARMA sieve bootstrap
samples sorne results established by CP (2003) for the AR sieve bootstrap. In turn,
sorne of CP (2003)'s lemmas are adaptations of identical results in Berk (1974) and
37

An, Chen and Hannan (1982).
2.5.1 Consistency of MASB ADF test
In or der to prove that the MA sieve bootstrap ADF test is consistent, we now prove
two results on the elements of A~ and B~. These results are stated in terms of
bootstrap stochastic orders, denoted by 0; and 0;, which are defined as follows.
Consider a sequence of non-constant numbers {en}. Then, we say that X~ = 0; (cn)
a.s. or in p if Pr* {IX~/ Cn 1 > E} -+ 0 a.s. or in p for any E > O. Similarly, we say that
X~ = O(cn ) if for every E > 0, there exists a constant M > 0 such that for alllarge n,
Pr*{IX~/cnl > M} < E a.s or in p. It follows that if E*IX~I -+ 0 a.s., then X~ = 0;(1)
a.s. and that if E*IX~I = 0(1) a.s., then X~ = 0;(1) a.s. See CP (2003), p. 7 for a
slightly more elaborated discussion.
Lemma 2.4. Under assumptions 2.1 and 2.2', we have
h * ~t * W ere w t =L..k=l ck'
Proof: see appendix.
1 ~ * 2 A ( )2 1 ~ * 2 *() 2" ~ Yt-1 = 7rn 1 2" ~ wt- 1 + op 1 a.s. n t=l n t=l
Lemma 2.5. Under assumptions 2.1 and 2.2' we have
(
n )-1 ~ L:x;,tX;,tT = 0;(1) a.s. t=l
II~ X;,tY;-lll = 0;(np1/2) a.s.
38
(2.22)
(2.23)
(2.24)
(2.25)

(2.26)
Proof: see appendix.
We can place an upper bound on the absolute value of the second term of A~.
This is:
But by lemma 3.5, the right hand side is O;(n-1 )O;(npl/2)O;(n1/ 2pl/2) which gives
O;(n1/2p). Now, using the results of lemma 3.4, we have that:
-lA* A (1) 1 ~ * * *(1) n n = 7rn - ~ Wt-lCt + op a.s. n t=l
We can further say that
-2B* A (1)2 1 ~ * 2 *(1) n n = 7rn 2" ~ w t - 1 + op a.s. n t=l
because n-2 times the second part of B~ is O;(n-1). Therefore, the T~ statistic can
be seen to be: 1 ",n * *
7,* = ri L.".t=l W t - 1Ct + *(1) as
n 1/2 Op ..
()' (~2 l:~=l wt_1 2)
recalling that W;=l:t=l cZ, it is then easy to use the results of chapter 2 along with
the continuous mapping theorem to deduce that:
1 n d* 101 - L W;_l c; -+ WtdWt a.s. n t=l 0
1 ~ * 2 d* 101 2 2" ~ W t- 1 -+ Wtdt a.s. n t=l 0
under assumptions 1 and 2'. We can therefore state the following theorem.
Theorem 2.3. Under assumptions 1 and 2', we have
d* 7,* -+ n fol WtdWt
(J~ W;dtf/2
39
a.s.

which establishes the asymptotic validity of the MASB ADF test.
2.5.2 Consistency of ARMASB ADF tests
It is now very easy to prove the asymptotic validity of ADF tests based on the AR
MASB distribution. It indeed suffices to show that results similar to those presented
in the last subsection hold for the ARMASB DG P. In or der to do this, we make use of
the MA(oo) form of the ARMASB DGP (see equation 2.14 above) and its Beveridge
Nelson decomposition. Then, we can state the following corollaries of lemmas 2.4 and
2.5.
Corollary 2.4. Vnder assumptions 2.1 and 2.2', we have
1 ~ * * ()A ( ) 1 ~ * * *(1) - LJ Yt-1 é t = n 1 - LJ W t _ 1é t + op a.s. n t=l n t=l
1 ~ * 2 ()A ( )2 1 ~ * 2 *() 2 LJYt-1 = n 1 2 LJ wt- 1 + op 1 a.s. n t=l n t=l
Proof: see appendix.
Corollary 2.5. Vnder assumptions 2.1 and 2.2' we have
Proof: see appendix.
(
n )-1 ~ L X;,tX;,t T = 0; (1) a.s. t=l
II~X;,tY;-lll = 0;(np1/2) a.s.
II~ X;,té;11 = 0;(n1/2p1/2) a.s.
40
(2.27)
(2.28)
(2.29)
(2.30)
(2.31)

Theorem 2.4 evidently follows.
Theorem 2.4. Under assumptions 2.1 and 2.2', we have
This establishes the asymptotic validity of the MASB ADF test.
2.6 Conclusion
Invariance principles are a necessary tool for the derivation of the asymptotic prop
erties of unit root tests. In this chapter, we have established such a result for partial
sum pro cesses built from data generated by either an MA or an ARMA sieve boot
strap DGP. Then, we have established the asymptotic validity of ADF tests based
on MASB and ARMASB distributions. This justifies the use of these methods in
practical applications. However, it does not imply that doing so increases the test's
accuracy. At the time of writing this, no formaI proof of the existence of potential
asymptotic refinements resulting from utilizing sieve bootstrap methods with 1(1)
variables has been devised. Nevertheless, simulation results presented in the next
chapter indicate that such refinements may exist.
41

Chapter 3
Simulations
3.1 Introduction
We now present a set of simulations designed to illustrate the extent to which the
proposed MASB and ARMASB schemes improve upon the usual ARSB. For this
purpose, 1(1) data series were generated from the model described by equation (2.19)
with errors generated by a general linear model of the class described in equation
(2.5) with NID(O,l) innovations. Several DGPs were used for this purpose and each
one is described below.
Recently, Chang and Park (2003) (CP 2003 hereafter) have shown, through Monte
Carlo experiments, that the ARSB allows one to reduce the ADF test's error in re
jection probability (ERP), which is defined as the difference between the probability
of rejecting a true null hypothesis and the nominal level, but not to eliminate it
altogether. Such results are generally interpreted as evidence of the presence of as
ymptotic refinements in the sense of Beran (1987), even though no theoretical pro of
exists to date. Their simulations however show that the AR sieve bootstrap loses
42

sorne of its accuracy as the dependence of the error process increases. This is, of
course, not a surprise because the longer it takes for the dependence to decrease, the
larger is the difference between the correlation structure of the estimated AR(p) sieve
and that of the true AR( 00) process, and therefore, the greater the difference between
the true and the bootstrap DGPs. As we will see shortly, the same fate befalls both
the MA and ARMA sieve bootstrap.
Most of the existing literature on the rejection probability of unit root tests uses,
as an illustration of how bad things can get, the case where the unit root process's first
difference is stationary and invertible with a moving average root near the unit circle.
The simplest such model is the MA(l) with a parameter close to -1. This typically
results in a large ERP of the asymptotic ADF test because of the near cancellation
of the MA root with the autoregressive unit root. Classical references on this are
Schwert (1989) and Agiakoglou and Newbold (1992). Evidently, this setup is not
adequate in the present case because an MA(l) bootstrap DGP would be a correctly
specified model of the original data's correlation structure, so that the resulting test
would not be a sieve bootstrap test any longer. Further, to base a simulation study
on only one DGP creates the risk of obtaining results that are proper to this DGP
alone. Hence, our simulations use several DGPs which will be introduced later.
An interesting feature of the simulations presented below is the fact that the ADF
tests based on MA(q) and ARMA(p,q) sieves often widely outperform tests based
on ordinary AR(p), but never the reverse. In other words, bootstrap samples based
on MA(q) or ARMA(p,q) approximations sometimes bring substantial accuracy gains
over the AR(p) sieve in terms of ERP under the null, while every time the AR(p)
sieve performs better than the other two, the difference is not large. We argue that
this is so because the residuals of the ADF regression based on the ARSB samples
are roughly uncorrelated, as long as the order of the AR(p) sieve is the same as the
order of the ADF regression, which is commonly the case, while the residuals of the
43

ADF regression estimated on the MASB and ARMASB samples are correlated, and
their correlation structure is similar to that of the original test regression's residuals.
Simulation evidence seems to support this point of view.
These observations lead us to propose two modifications to the ARSB ADF test.
Firstly, we propose to use fewer lags in the ARSB ADF regression than in the ARSB
model itself. This effectively creates correlated residuals in the test regression and
therefore shifts the test statistics's distribution to the left. Secondly, we propose the
use of a modified version of the fast double bootstrap. Simulations indicate that both
these ideas yield improvements over the usual ARSB ADF test.
We also observe that situations in which the MASB and ARMASB tests greatly
outperform the asymptotic and ARSB tests are those when the underlying DGP
contains a strong, negative moving average root, which results into near cancellation
of the autoregressive unit root. It therefore appears natural that the MASB and
ARMASB would bear important ameliorations over the ARSB and asymptotic tests
because the first two explicitly model this MA root while neither of the latter does.
The rest of this chapter is organized as follows. Section 2 describes the met ho dol
ogy used to carry out the different bootstrap ADF tests. Section 3 discusses simulation
results for several DGPs and studies the characteristics of the different sieve models
utilized. Section 4 offers an explanation for the poor performances of the ARSB and
proposes a simple modification designed to increase its accuracy under the null. Along
the same line, section 5 introduces a modified fast double bootstrap and studies it
through simulations. Section 6 concludes.
44

3.2 Methodological issues
In order to obtain consistent test statistics, one must make sure that the parameters
used in the construction of the bootstrap DG P are consistent estimates under the
null. This is easily achieved in the present case by estimating the appropriate time
series model (ie: AR, MA or ARMA) of the first difference of Yt using any consistent
method. lndeed, whenever a = 1, (2.19) simply becomes
Yt - Yt-l = Ut,
which is our null hypothesis. Lemma 2.1 and corollary 2.1 discuss consistency of
the parameters of the MA and ARMA sieve while consistency of the parameters of
the AR sieve is shown by Berk (1974) and Park (2002). Bootstrap ADF tests are
conducted as follows:
1. Estimate the ADF test regression on the original data and compute the ADF test
statistic. In aIl that follows, we have used the ADF regression containing a constant
and no deterministic time trend. Thus, the statistic we compute is the one commonly
called Tc.
2. Estimate the sieve bootstrap model. This is do ne by fitting either an AR(p),
an MA(q) or an ARMA(p,q) to t::..Yt. Notice that this implicitly imposes the null
hypothesis. In order to draw bootstrap samples, we need to create the residuals
series. For the AR sieve, this is: p
Êt = .6..Yt - L (Xp,kt::..Yt-k k=l
For the MA and ARMA sieves, this is:
where lÎIt is the tth row of the triangular GLS transformation matrix for MA(q) or
ARMA(p,q) pro cesses evaluated at the parameter estimates (see the discussion below
45

and chapter 4).
3. Draw bootstrap errors (Er) from the EDF of the recentered residuals (Êt-~ 2:~=1 Êt ).
As is well known, OLS residuals under-estimate the error terms so that it may be
desirable to rescale the recentered residuals by a factor of ((n~f.») 1/2, where f is the
number of parameters.
4. Generate bootstrap samples of Yt. This first requires that we generate the bootstrap
first difference process. For the AR sieve bootstrap: p
~Y: = L âp,k~Y:_k + Et, k=l
for the MA sieve bootstrap:
for the ARMA sieve bootstrap: q p
~Y: = L 7rq,kEt_k + L âp,k~Y:-k + Et. k=l k=l
This requires some sort of initialisation for the ~Y; series. We postpone this discussion
for now. Then, we generate bootstrap samples of Yt: y; = 2:~=1 ~Y;
5. Compute the bootstrap T~i ADF test based on the bootstrap ADF regression:
p
y: = ao + aY:_1 + L ak~Y:_k + et k=l
where p is the same as above.
6. Repeat steps 2 to 4 B times to obtain a set of B ADF statistics T~i' i = 1,2, ... B.
The p-value of the test is defined as:
P* = ~ tJ(T~i < Tc) i=l
where Tc is the original ADF test statistic and JO is the indicator function which is
equal to 1 every time the bootstrap statistic is smaller than Tc and 0 otherwise. The
46

null hypothcsis is rcjected at the 5 percent level whenever P* is smaller than 0.05.
Repeating this B times aIlows us to obtain a number of test statistics, aIl computed
under the nuIl hypothesis, which can therefore be used to estimate the finite sample
distribution of the test and conduct inferences. Of course, the larger Bis, the more
precise this estimate is. Further, for a test conducted at nominallevel Œ, B should be
chosen so that (B+1)Πis an integer, see Dufour and Kiviet (1998) or Davidson and
MacKinnon (2004), chapter 4.
In aIl the simulations reported here, the AR sieve and the ADF regressions are
computed using OLS. Further, aIl MA and ARMA models were estimated by the an
alytical indirect inference methods of GZW (1994 and 1997). The bootstrap samples
are generated recursively, which requires sorne starting values for D..y;. There are
sever al ways to do this. The important thing is for the bootstrap sam pIe values not
to be infiuenced by whatever starting values we assume. In what follows, we have set
the first p or q, whichever is larger, values of D..y; equal to the first p or q values of
D..Yt and generated samples of n + 100 + p (or q) observations. Then, we have thrown
away the first 100 + p (or q) values and used the last n to compute the bootstrap
tests. This effectively removes the effect of the initial values and insures that D..Yt is
a stationary time series.
In order to obtain the residuals of the MA(q) or ARMA(p,q) sieves, we premultiply
a GLS transformation matrix to the vector of observations of D..Yt, which we denote
as D..y. This matrix, which we will calI '11, is defined as being the n x n matrix that
satisfies the equation '11'11 T = ~-1, where ~-1 is the inverse of the covariance matrix
of D..y. There are several ways to estimate W. A popular one is to compute ~-1 and
to obtain 1ÎI using a numerical algorithm (the Choleski decomposition for example).
However, this method, which is often referred to as being exact because it is based
directly on the MA(q) or ARMA(p,q) form of the model, requires the inversion of
the n x n covariance matrix, which is computationally costly when n is large. To
47

avoid this, one may prefer to decompose the covariance matrix of the inverse process
(for example, of a AR(oo) in the case of an MA(l) model). Because it is impossible
to correctly estimate the covariance matrix of an AR( (0) model in finite samples,
the resulting estimator of 1J! is said to be an approximation. For all the simulations
reported here, the transformation matrix was estimated using the method proposed
by Galbraith and Zinde-Walsh (1992), who provide algebraic expressions for 1J! rather
than for 1:. This is computationally advantageous because it does not require the
inversion, the decomposition nor the st orage of a n x n matrix since all calculations
can be performed through row by row looping. Since it is derived directly from the
model of interest itself (for example, from the MA(l) pro cess rather than from its
AR( (0) form) , this estimator of 1J! falls in the class of exact estimators. Its general
form for MA(q) models is given in the proof of observation 4.1 in the next chapter,
where it is used to devise a bias reduction method for ARMA(p,q) models.
As mentioned earlier, simulation studies very often use an invertible MA(l) pro cess
to generate Ut. The reason is that it is simple to generate and easy to control and
plot the degree of correlation of Ut by changing the sole MA parameter. This simple
device is obviously inappropriate in the present context because the MA(l) would
correctly model the first difference pro cess under the null and would therefore not
be a sieve anymore. We therefore endeavoured to use DGPs that could not be mod
elled properly by any process belonging to the finite or der ARMA class. One such
model is the fractionally integrated autoregressive moving average model of order 1
(ARFIMA(l,d,l)):
where L is the lag operator. An important property of this model is that it yields a
stationary process whenever the AR and MA parts are stationary and invertible and
d < 0.5. Also, time series generated by ARFIMA pro cesses have long memory, which
means that a shock at any time period has repercussions far in the future. This is
48

of course desirable since we want to generate series with strong temporal correlation.
Finally, ARFIMA models have proved to provide quite adequate approximation for
several macroeconomic time series. For example, Diebold and Rudebush (1989, 1991)
use the ARFIMA framework to study United States output and consumption, Porter
Hudak (1990) applies it to money supply while Shea (1991) studies interest rates
behaviour. In fact, Granger (1980) has shown that such pro cesses arise naturally
when a data series is generated by aggregating several serially correlated processes.
Since most macroeconomic time series are compiled in such a fashion, it is likely that
ARFIMA pro cesses frequently occur in reality.
We also use MA and AR pro cesses with long time dependence. We insure that
they are stationary by imposing a geometrically decaying parametric structure. These
models have the following forms:
Ut = ()ip(L)Ut + Et
where ip(L) denote a polynomial in the lag operator L which can be chosen so as to
make the resulting series Ut stationary. Evidently, we are able to control the strength
of the correlation by changing the value of the parameter () and its length by making
the parameters of ip (L) decrease more or less rapidly. As we will discuss below, these
processes are very similar to inverted AR(p) and MA(q) models.
3.3 Simulations
In this section, we consider simulations for samples of 200 observations, which corre
spond to 50 years of quarterly data or close to 17 years of monthly data, a situation
that is likely to occur in real life applied macroeconomic work. Thus, the results we
present below are of special interest for applied researchers. Unless otherwise stated,
49
aIl the simulations presented in this section are based on 2000 replications of samples
of 200 observations and aIl bootstrap tests are computed using 499 bootstrap samples.
This section is divided as follows. In the next subsection, we define the DG Ps
used. In the following subsection, we present comparisons between the performances
of the ARSB, MASB and ARMASB for sorne arbitrarily chosen approximating orders.
The comparison is made on the basis that these orders are set to be the same for aIl
sieve models, which implies the use of similar information sets. The following 3
subsections are concerned with deeper analysis of the characteristics of each sieve
method, particularly with regards to their specification. The last subsection presents
simulation results where the different sieve orders are selected using a data dependent
method.
3.3.1 The DGPs
Several DGPs were used. First, we have used different DGP belonging to the ARFIMA(I,d,l)
class of model. It is weIl known that these pro cesses are stationary whenever d is
smaller than 0.5 in absolute value and that the higher dis, the longer the process'
memory is. Further, it is important to note that near-cancellation ofthe unit root and
the MA part occurs when the MA parameter is close to -1. Hence, we expect to ob-
serve strong over-rejection tendencies in such cases. We also use long autoregressions
and moving averages with decaying parameters. These models are:
ARI: Ut = O[0.99L - 0.96L2 + 0.93L3 - ... + 0.03L33
]Ut + Ct
MAI: Ut = O[0.99L - 0.96L2 + 0.93L3 - ... + 0.03L33
]Ct + Ct
Strictly speaking, these could be modelled adequately by an AR(33) and an MA(33)
respectively. We will consequently restrict ourselves to using approximating orders
far from these values so that we can obtain results similar to what we would get if
50

these were indeed infinite order processes. Unreported simulations based on AR(99)
and MA(99) DGPs yielded similar results. It is worth noting that the pattern of
parameter decay is very close to what we would get if we were to invert an MA(l) or
an AR(1) for the model ARI and MAI respectively. As a matter of fact, the rates of
decay in ARl, and MAI are most of the time slower than what we would have with
inverted MA(l) and AR(l) models. For example, for high enough values of (), the
decay rate in ARI and MAI is slower than the decay rate of the parameters from an
inverted MA(l) or AR(l) model with parameter 0.99. On the other hand, for a low
enough value of (), the reverse is true. It follows that we can control for the degree
of correlation by changing the value of (). In all simulations, the innovations were
homoskedastic and drawn from a normal distribution with variance 1. Since ADF
tests are scale invariant, this last assumption does not affect our results.
3.3.2 Arbitrary approximating orders
Figures 3.1 and 3.2 show the ERP of the ADF test as a function ofthe MA parameter
in the ARFIMA(O,d,l) model based on different parameter values. We have set d =
0.45 and the MA parameter takes the values -0.95, -0.9, -0.8, -0.6, -0.2, 0.2, 0.6, 0.8,
0.9 and 0.95. This yields a pro cess with long memory with possible near-cancellation
of the autoregressive and MA roots. The tests labelled asymp are based on the
critical values of the DF distribution at nominal levels 5% and 10% for samples of
200 observations. These values are -2.88 and -2.57 respectively. The tests labelled
AR, MA and ARMA are based on null distributions generated using AR, MA and
ARMA sieve bootstrap samples with the specified orders. Notice that the number of
lags in the ADF regression is the same as the order of the AR sieve bootstrap DGP,
which is consistent with CP (2003) and is consistent with what would happen if we
were using a data dependent method to choose these orders. We have chosen to fix
an the orders of our sieve models equal to 10 in order to identify which bootstrap test
51

makes the best use of this given parametric structure.
Figure 3.1. ERP at nominallevel 5%, ARFIMA(O,d,l), n=200.
0.8
0.1
0.6
0.5
-Allymp J - -AR(lO) - - MA(10) ••• ARMA(10,1O)
0.. 0.4 p:: >.I.l
0.3
0.2
0.1
0 -0.9 -0.8 -0.6 -0.2 0.2 0.6 0.8 0.9 0.95
-0.1
Them
Figure 3.2. ERP at nominallevel 10%, ARFIMA(O,d,l), n=200.
0.8
0.1 -Asymp
0.6 - -AR(lO)
- - - MA(lO)
0.5 - • ARl'vIA(IO,lO)
0.. 0.4 p:: >.I.l
0.3
0.2 ' . ',\
, .
-0.95 -0.9 -0.8 -0.6 -0.2 0.2 0.6 0.8 0.9 0.95 -0.1 -~._~ .. ~_ .. ~ .. ~~----.. ~~.~ .. ~--_._~~------._-~--------~
Theta
The most striking feature of these figures is the apparent incapacity of the AR
52

sieve bootstrap test to improve significantly upon the asymptotic one. On the other
hand, both MA(10) and ARMA(10,10) significantly reduce ERP, especiaIly so for the
most correlated pro cesses (-0.95, -0.9 and -0.8). The question is therefore to discover
what it is that the last two do that AR sieve does not do. We will discuss this point
further below. Also, it is interesting to notice that using an ARMA(10,10) instead
of an MA(10) does not seem to improve the quality of the inference, except for an
MA parameter of -0.8 or -0.6, where the ARMA(10,10) corrects the MA(10)'s slight
tendency to under reject. This issue is also explored later.
These results obviously depend on the choice of approximating orders as weIl as
on the choice of the DGP. In particular, increasing the or der of the ARSB would
certainly contribute to decreasing its over-rejection problems. We have considered
this issue by comparing the curves shown in figure 3.1 to similar curves generated
using approximating orders of 15.
Figure 3.3. ERP at nominallevel 5%, ARFIMA(O,d,l), n=200.
0.8
0.7 -AR(10) -AR(15)
0.6 - - - MA(10) - -MA(15) - - ARMA(8,8) - -ARMA(10,10)
0.5
§2 0.4
~ 0.3
:\ 0.2 ~:\
,'\ ':\
0.1 ..... '~~ ..... ~ ........
0 ~:::. ~
-0.95 -0.9 -0.8 -0.6 -0.2 0.2 0.6 0.8 0.9 0.95 -0.1
theta
Figures 3.3 shows the effect of increasing the order of the different sieves on the
53

ERP of the 5% level test. As would be expected, such increases have a beneficial
effect on the ERP of aH tests. The most noteworthy amelioration is the decrease of
the AR sieve's ERP. Note that the ERP functions do not cross, that is, increasing
aH approximating orders by the same increment does not change the order in which
each sieve test performs.
Next, we considered an ARFIMA(l,d,O) model with the AR parameter taking
values -0.95, -0.9, -0.8, -0.6, -0.2, 0.2, 0.6, 0.8, 0.9 and 0.95. Figures 3.4 and 3.5 show
the ERP of the various ADF tests conducted on these data sets at nominallevels 5%
and 10%.
Figure 3.4. ERP at nominallevel 5%, ARFIMA(l,d,O), n=200.
0.3-
0.25 -
0.2
0.15 ~ Pol
0.1
0.05
0
-0.05
\
\
\
, .. _.~.'\. ....
'\...:: "
-Asymp
- -AR(lO) ••• MA(lO)
- • AlU.fA(lO,lO)
-.-/
/
/ /
/
-0.95 -0.9 -0.8 -0.6 -0.2 0.2 0.6 0.8 0.9 0.95
Them
54

Figure 3.5. ERP at norninallevel 10%, ARFIMA(l,d,O), n=200.
0.3
0.25 -Asymp
- -AR(lO)
0.2 - • - MA(lO)
-- - ~(10,10) 1 \
0.15 1 ~ \ f;.tl J
0.1 \ 1 , ~ _'. ~ f
0.05 '\, ,", f , " , .
.-. ""=== "10 .....-;- --"
0 ,... .....
-0.95 -0.9 -0.8 -0.6 -0.2 0.2 0.6 0.8 0.9 0.95 1
-0.05
Them
A quick comparison with figures 3.1 and 3.2 reveals a completely different situation.
Indeed, the severe over-rejection displayed by the ARSB and asymptotic tests in these
former figures is now aIl but gone. This is to be expected since both tests explicitly
model the AR root of the DGP. The MA sieve bootstrap still performs quite weIl.
Similarly to what happened with the preceding DGP, it tends to over-reject somewhat
for values of the sole parameter (here, the AR parameter) close to -1. Nevertheless,
comparing figures 3.4 and 3.5 to figures 3.1 and 3.2 reveals that this problem is
sm aIler with the new DGP. For example, the MA(lO) sieve bootstrap test over-rejects
by 0.18 when the true DGP is the ARFIMA(O,d,l) with an MA parameter of -0.95
and only by 0.034 when the DGP is the ARFIMA(l,d,O) with an AR parameter of
-0.95. AIso, it should be noted that the MA(10) sieve bootstrap test now over-rejects
slightly for large positive AR parameters (over-rejection of 0.031 at 5% and 0.055 at
10%). Again, this is not too surprising because these parameters yield very persistent
MA( (0) models when inverted, which are hard to model properly using a finite order
MA(q). Nevertheless, the MA sieve bootstrap still performs very adequately and thus
55

appears to be quite robust to the form of the underlying process, which is more than
can be said of either the asymptotic or the AR sieve bootstrap tests.
The ARMA sieve also experiences sorne difficulties around the borders of the pa
rameter space. Figures 3.4 and 3.5 clearly show that it over-rejects quite severely
compared to the other three tests when lai 2':0.90. Nevertheless, it can be seen by
comparing figures 3.4 and 3.5 to figures 3.1 and 3.2 that the test's ERP is actually
smaller here for a MA or AR parameter of -0.95 (0.22 in the ARFIMA(O,d,l) case
and 0.16 in the ARFIMA(l,d,O) case at 5%). On the other hand, the ERP at 5% goes
from 0.009 in the first case with an MA parameter of 0.95 to 0.18 in the second case
with an AR parameter of 0.95. Thus, the ARMA sieve bootstrap test appears to be
less robust than the MA sieve bootstrap test. Of course, these results depend on the
chosen AR and MA orders. We will see later that the ARMASB is greatly infiuenced
by this choice.
Aside from the behaviour of the ARMASB, there is a quite simple explanation
to the results of the preceding five figures, which is that the ARFIMA(O,d,l) model
used to generate figures 3.1 to 3.3 includes DGPs with near cancelling roots when the
MA parameter takes values near -1 while the ARFIMA(l,d,O) does not include such
DG Ps. Indeed, we may write the model having generated Yt as follows:
where e(L) and <I>(L) are lag polynomials. In the case of the ARFIMA(O,d,l), e(L)=l
and <I>(L)=(l+BL), where B is the sole MA parameter. Dividing both sides by <I>(L),
it is easy to see that, when B is close to -1, <I> (L) and (1-L) almost cancel each other
out. What results is therefore what looks like a stationary ARFIMA(O,d,O) pro cess
and it may be difficult to distinguish between this false pro cess and the true one. It is,
however, necessary to be able to make the distinction between the true non-stationary
pro cess and the false stationary pro cess for the purpose of unit root testing. Indeed,
56

if our testing procedure is fooled into believing that the series is driven by the false
stationary DG P, it will naturally tend to reject the unit root hypothesis. This is
what happens to the asymptotic test and the AR sieve bootstrap tests. The MA and
ARMA sieve bootstrap tests also mistake Yt for a stationary process, as is evident
from their higher ERP when () approaches -1. However, the fact that they over-reject
much less severely indicates that they make this mistake less often than the other
two. This is also to be expected because they both explicitly model an MA part, so
that they are more likely to detect the presence of the strong MA root. On the other
hand, when cI>(L)=l and 8(L)=(1+o:L), where 0: is the sole AR parameter, no such
near cancellation occurs, even when 0: is close to -1.
Another way of looking at the bad properties of the ARSB is to look at another
feature of our simulations, which is this time common to figures 3.1 to 3.5, as weIl
as to all the simulations presented below using the long AR and MA models, and
therefore seems to be quite robust to the underlying DGP. This feature is that the
ARSB test has almost always the same ERP as the asymptotic test and that it
brings only small accuracy gains, when it brings any. This implies that the AR sieve
bootstrap ADF test distribution is very close to the DF distribution and to the right
ofthe actual test's distribution. Therefore, the 5% and 10% critical values of the AR
sieve bootstrap test are close to the DF critical values and lower in absolute value
than the actual distribution's critical values, and the test over-rejects. In section
5, we use several simulations to show that this is due to the fact that the ARSB
does not properly replicate the correlation structure present in the original data's
ADF regression residuals. We propose sorne solutions to this problem, including a
modified version of the fast double bootstrap of Davidson and MacKinnon (2006a).
For the present, let us look at the results of another set of simulations where we
use models AR1 and MAl to generate the first difference process. Figures 3.6 to 3.9
were all generated using samples of 200 observations of these models. We have used
57

5 000 Monte Carlo sampI es to evaluate the ERP function of the asymptotic test while
the ERPs of the bootstrap tests were evaluated using 3 000 Monte Carlo samples
with 499 bootstrap replications each.
Figure 3.6 shows the ERP at a nominallevel of 5% of the asymptotic, AR, MA and
ARMA sieve bootstrap with the DGP ARl for values of () ranging from -0.99 to O.
Figure 3.7 shows the same thing for nominallevel 10%. As expected, the asymptotic
and AR sieve tests severely over-reject the null. The shape of their ERP functions
is however quite different from what it was in the ARFIMA(O,d,l) DGP. This is due
to the fact that the correlation structure decreases much more slowly as a function
of () than it did as a function of the MA parameter in the latter example. It may
also be due in part to the near-cancellation of the unit root which may occur with
the MA lag polynomial that would be obtained by inverting the model AR1. On the
other hand, both the MA and ARMA sieves considered have, in comparison, quite
acceptable ERPs. Further, the proportion by which they over-reject is relatively
constant through the parameter space, which confirms that the persistence of the
correlation is as much a determining factor as its strength. These are yet more
arguments in favour of the MASB and ARMASB on the ground that they appear to
be much more robust to the underlying DGP than the ARSB or the asymptotic test.
58

Figure 3.6. ERP at nominal level 5%, ARl model, n=200.
0.800
0.700 -asymp
0 0 Cl o AR(lO)
0.600 Cl IJ MA(lO)
? ARMA(lO,lO) 0.500
!fi 0.400
0.300
0.200
O.IDO tt. ~ .:. Z <> <> .:)
:?; <> <> A À A A A
0,000
.99 -0.9 -0.8 -0,7 -0.6 -0.5 -0.4 -0.3 -0.2 -0.100
Theta
Figure 3.7. ERP at nominallevellO%, ARl model, n=200.
0.8 ---0.7
-asymp 0 Cl 0 Cl AR(lO) Cl
Cl
0.6 A MA(ID)
0 <> ARMA(IO,lO) 0.5
!fi 0.4 .
0.3
0.2 <> <> <;0 Il à <> ç.
<;0 ? <> <;0
0.1 1).
A A A IJ À A A
0
.99 -0.9 -0.8 -0.7 -0.6 -0.5 -0,4 -0.3 -0.2 -0.1 0 -0.1
theta
59

Figures 3.8 and 3.9 present similar results for the MAl model. We first note
that the AR and MA sieve bootstrap tests have similar characteristics for almost all
values of () except when this parameter is close to 1, in which case the MA sieve
bootstrap experiences sorne difficulties. This is however not surprising because the
pro cess MAl in such cases is very similar to an inverted AR(l) with a parameter
close to 1. It is a well known fact that such pro cesses are difficult to estimate without
bias because they lie in a region close to non-stationarity. Thus, the MA sieve may
have problems in trying to accurately estimate the DGP in this region. This can also
explain why the MA sieve over-rejects more severely for ()s close to 1 than for ()s close
to -1 because precise estimation of the latter usually proves to be more difficult than
precise estimation of the former. See figure 1 of MacKinnon and Smith (1998) for
a convincing illustration of this facto The ARMASB on the other hand experiences
difficulties all over the parameter space. We postpone a full discussion of this issue
until section 3.5.
60

Figure 3.8. ERP at nominal level 5%, MAI model, n=200.
0.3
-Q-asymp
0.25 -a-AR(1O)
-t:;- MA(lO)
0.2 ..."., ARMA~lO)
0,15 Q.. cr: "" 0.1
0.05
0 -0.95 -0.8 -0.4 0 0.4 0.8
-0,05
Theta
Figure 3.9. ERP at nominallevelIO%, MAI model, n=200.
-asymp 0.250 -a- AR(IO)
-6-MA(lO)
0.200 -+- ARMA(lO,lO)
0.150
ffi 0.100
0.050
0.000 +----r----r--""""'~~"--t---r_--..,._--_j
-0.95 -0.8 -0.4 o OA 0.8 0.95
Theta
Next, we consider an ARFIMA(l,d,l) DGP with d = 0.45 and different values of
e and a. Our purpose here is to see whether this DGP will allow the ARMASB to
61

outperform its two rivaIs. Figures 3.10 and 3.11 plot the ERP of these tests as a
function of the nominal size for two DGPs.
Figure 3.10. ERP function, ARFIMA(l,d,l) model, n=200, a=/J=-0.85.
0.35
0.3
0.25
0..
-AR(10)
• - -MA(10)
- -ARMA(10,10)
Ri 0.2
0.15
0.1
0.05
O-~--r-~--"-~'--"---~---~--T--~~~--'r--''-'-i
0.01 0.03 0.05 0.07 0.09 0.11 0.13 0.15 0.17 0.19 0.21 0.23 0.25 Nominal size
Figure 3.11. ERP function, ARFIMA(l,d,l) model, n=200, a=/J=-O.4.
0.06
-AR(10)
0.04 • - • MA(10)
- -ARMA(10.10)
0.02 -- ...... 0.. - .... """' .......... _-0:: 0 -~ w
; -6.M ·O.t15. O. 0.07 0.09 0.11 0.13 . . -0.02 • lI!fo. ......... "" ..
. ........
-0.04
Nominal size
62
When () and Cl:: are both close to -1, the ARSB and MASB perform very similarly
while the ARMASB has significantly higher ERP. The fact that it models both the
AR and MA part of the DG P therefore does not seem to give it any advantage over
the others in this extreme case. When on the other hand, () and Cl:: are equal to -
004, the three tests have low ERP around the usual nominal levels of 5% and 10%
but, as the nominallevel increases, the ARMASB over-rejects and the MASB under
rejects. In any case, figures 3.10 and 3.11 should not be taken as proof that the
ARMASB cannot be counted on to provide significantly more accurate results than
the MASB. Indeed, these results are quite restrictive and, as we will see later, the
ARMASB tests' performances are closely linked to its specification. In particular,
it will be shown in subsection 3.5 that the ARMA(10,1O) used here is grossly over
specifying the correlation structure. Much better results are then obtained using
smaller approximating orders.
3.3.3 AR sieve
The issue of the residuals' correlation in the ADF regression will be dealt with in
section 5. In the present section, we only consider the behaviour of the ARSB as a
function of its order, p, for a fixed sample size of 200 observations. Our goal is to
establish the fact that increasing p allows us to decrease the test's ERP. We already
had a glimpse of this property in figure 3.3.
63

Figure 3.12. ERP of ARSB at nominal level 5%, ARFIMA(0,d,1) model, 0=-0.9,
n=200.
o.~
0,$
0,1
I-AJt(p> 1 0.0
~ 05'
0.4
o,~
0.2
0.\
3 5 7 9 11 13 15 OuIbr
As the figure shows, increasing p steadily decrease the ARSB's ERP. This is nat
ural since higher order parametric models capture more correlation. This does not
contradict our argument to the effect that large ERPs are at least partly due to the
ARSB's failure to replicate the correlation of the original ADF regression's residuals
correlation because, as p increases in the ADF regression, less correlation remains in
the residuals so that the absence of correlation in the ARSB ADF regression residuals
is less consequential.
3.3.4 MA sieve
Figure 3.13 shows the ERP of the MASB of or der q test as a function of q. It is based
on 2000 Monte Carlo samples with 499 bootstrap each.
64
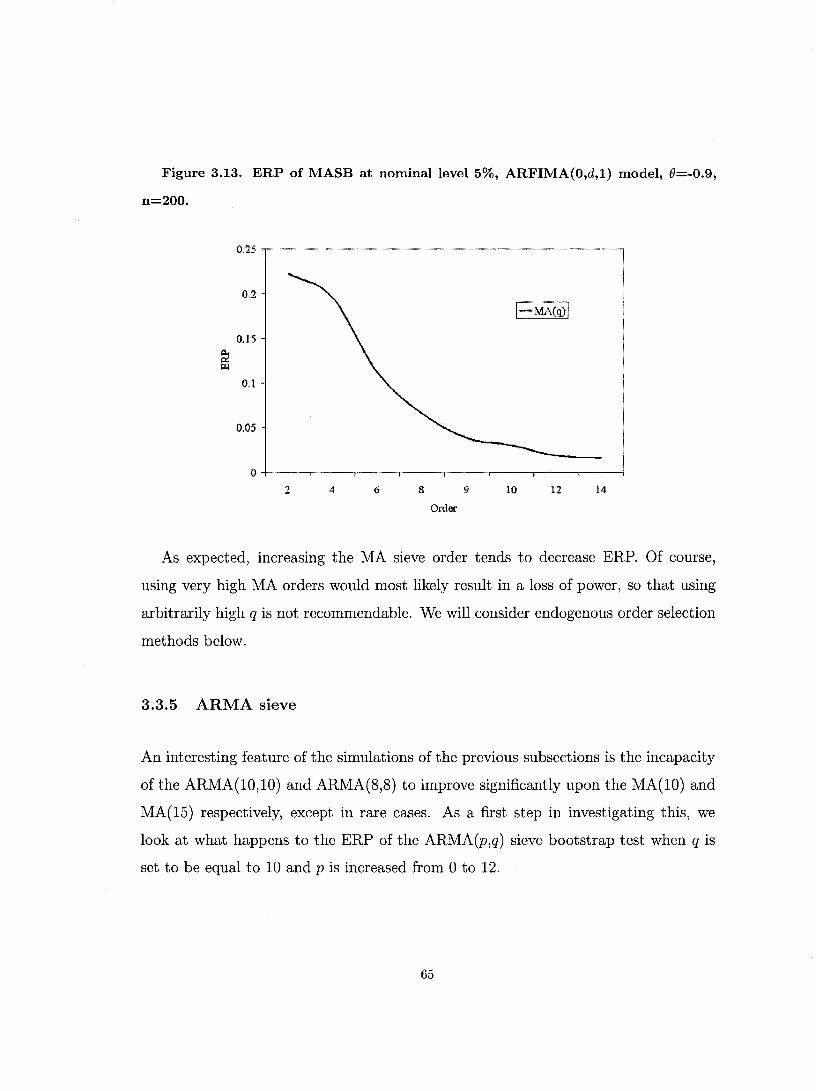
Figure 3.13. ERP of MASB at nominal level 5%, ARFIMA(O,d,l) model, 0=-0.9,
n=200.
0.25
0,2
0.15
~ O,}
0.05
0
2 4 6 8 9 10 12 14
Order
As expected, increasing the MA sieve order tends to decrease ERP. Of course,
using very high MA orders would most likely result in a loss of power, so that using
arbitrarily high q is not recommendable. We will con si der endogenous order selection
methods below.
3.3.5 ARMA sieve
An interesting feature of the simulations of the previous subsections is the incapacity
of the ARMA(lO,10) and ARMA(8,8) to improve significantly upon the MA(10) and
MA(15) respectively, except in rare cases. As a first step in investigating this, we
look at what happens to the ERP of the ARMA(p,q) sieve bootstrap test when q is
set to be equal to 10 and p is increased from 0 to 12.
65

Figure 3.14. ERP at nominallevel 5% and 10%, ARI model, n=200.
0.3
0,25
0,2
a. ffi 0.15
. -. .t
, 0.1 .. " , . - ...... _*.- ... "
0.05 ~ .
0
0 2 3 4 fi 6 7 8 9 10 11 12 AR order
The ERP functions shown in figure 3.14 were generated using DGP AR1 with 3000
Monte Carlo replications of samples of 200 observations and 499 bootstrap samples
were used for each replication. This figure is very odd indeed, for it indicates that
adding an AR part to the MA sieve, Le., going from an MA(lO) to an ARMA(l,lO),
increases the test's ERP. As a matter offact, the 5% nominallevel test ERP increases
with p until p = 7, at which point it st arts declining again. The addition of the
eleventh and twelfth AR parts is quite beneficial because the ERP at both nominal
levels then drops to much lower levels than those of the MA(lO) sieve. Thus, these
figures indicate that the difference between p and q is a determining factor for the
accuracy of the ARMA(p,q) sieve. This result can be readily explained by the fact
that the roots of the average estimated AR and MA polynomials often cancel each
other out. To illustrate this, we consider three examples, namely the ARMA(1,10),
ARMA(7,10) and ARMA(12,10). These roots are shown in table 3.1 where, as usual,
i denotes the imaginary number J=I.
66

Table 3.1. Roots of AR and MA parts.
Model Roots (AR) Modulus Roots (MA) Modulus
ARMA(1.10) -9.31 9.31 1.17 1.17
0 0 0 1.47 1.47
0 0 0 -0.8+-1.68i 1.86
0 0 0 0.29+-1. 73i 1.75
0 0 0 -1.62+-1.04i 1.92
0 0 0 1.21+-1.17i 1.68
ARMA(7.10) -1.38+-0.79i 1.59 1.16+-1. 09i 1.59
0 -1.42+-1.17i 1.83 0.166+-1.71i 1.71
0 0.12+-1.855i 1.85 -1.03+-1.55i 1.86
0 -1.59 1.59 -1.88+-0.61i 1.97
0 0 0 1.26+-0.09i 1.26
ARMA(12.10) 0.81 +-0.99i 1.27 0.17+-1.67i 1.67
0 1. 12+-0.4i 1.18 -1.62+-1.59i 2.26
0 0.21 +-1.32i 1.33 1.2+-0.2i 1.21
0 -1.01+-0.86i 1.32 1.07+-1.14i 1.56
0 -1.22+-0.29i 1.25 -0.91+-1.47i 1.72
0 -0.47+-1.27i 1.35 0 0
The AR part in the ARMA(1,10) sieve DGP does not come close to caneelling out
any of the MA roots. It is therefore logical that the ARMASB tests based on this
specification would have ERP comparable to those based on the MA(lO). However,
table 1 reveals a completely different st ory for the ARMA(7,1O) sieve. Indeed, four
complex roots (and their conjugate, for a true total of 8) tend to caneel out, among
which three do so almost exactly. For instance, the MA root 1. 16+-1.09i has modulus
1.591 while the AR root -1.38+-0.79i has modulus 1.590. Henee, the net correlation
modelled by the ARMA(7,10) must be much smaller than what such a high parametric
67

or der would tend to suggest. Accordingly, our simulations indicate that ARSB tests
based on this model reject over 20% of the times at nominallevel 5%. Finally, there
appears to be many fewer such cancellations occurring in the ARMA(12,1O). This
would explain why the tests based on this sieve model have lower ERP.
It is also interesting to investigate whether increasing the ARMASB approximating
order substantially decreases the test's ERP. To do so, we have generated 5 000
samples of the ARFIMA(l,d,O) and ARFIMA(O,d,l) DGPs used above with a=-0.9
and (1=-0.9. For each sample we have estimated several ARMA(.e,.e) models, with
.e=1,2, .. 10 and conducted sieve bootstrap ADF tests based on each. Figure 3.15
shows the ERP of these tests at nominal level 5%.
Figure 3.15. ERP at nominal level 5%, n=200.
0.:25
0.2
0.15-
~ Pol
0.1
0.05
0
3 4 :5 6
• * • ARFIMA(O,d,l)
-ARFIMA(1,d,O)
-- . -. -... -.
7 8 9
Order
-..
10
The figure shows that the test's ERP depends on the sieve order only to a certain
degree. In particular, it appears to be almost exactly the same for all the approxi
mating orders considered here when the DGP is the ARFIMA(O,d,l). The same thing
can be observed with the ARFIMA(l,d,O) DGP and .e ~ 4. To explain this puzzling
68

feature, we have also computed the average values of the estimated parameters of the
ARMA(R,t') models, as weIl as their standard deviation. Tables 3.2 and 3.3 show the
ratio of the average value of each parameter of the MA and AR parts respectively of
the ARMA sieves to its standard deviation. These tables are based on simulations
carried out using the ARFIMA(O,d,l) DGP with 8=-0.9.
Table 3.2. Parameters of the MA part.
1 2 3 4 5 6 7 8 9 10
81 -22.75 -6.91 -5.56 -5.39 -5.22 -5.02 -4.74 -4.49 -4.25 -4.00
82 na 1.25 1.28 1.18 1.03 0.93 0.76 0.66 0.55 0.42
83 na na -0.61 -0.41 -0.18 -0.08 0.07 0.05 0.13 0.08
84 na na na 0.19 0.04 0.09 0.03 0.10 0.05 0.12
85 na na na na 0.05 -0.09 0.03 -0.06 0.06 0.00
86 na na na na na 0.12 -0.01 0.10 0.02 0.05
87 na na na na na na 0.09 -0.03 0.04 0.00
8s na na na na na na na 0.10 0.00 0.06
89 na na na na na na na na 0.10 -0.01
810 na na na na na na na na na 0.14
69

Table 3.3. Parameters of the AR part
1 2 3 4 5 6 7 8 9 10
ŒI -5.50 -1.65 -0.96 -1.07 -1.24 -1.36 -1.46 -1.54 -1.60 -1.70
Œ2 na 1.25 0.97 1.01 1.04 0.94 0.83 0.66 0.55 0.40
Œ3 na na -0.47 -0.18 -0.18 -0.10 -0.09 -0.06 -0.07 -0.07
Œ4 na na na -0.13 -0.15 -0.20 -0.21 -0.22 -0.20 -0.24
Œ5 na na na na -0.18 -0.15 -0.20 -0.18 -0.23 -0.24
Œ6 na na na na na -0.24 -0.20 -0.24 -0.25 -0.26
Œ7 na na na na na na -0.24 -0.22 -0.24 -0.23
Œ8 na na na na na na na -0.28 -0.26 -0.27
Œg na na na na na na na na -0.29 -0.23
ŒlQ na na na na na na na na na -0.34
It is clear from these numbers that most of the ARMA sieves used to build fig
ure 3.15 are grossly over-specified, in the sense that higher or der parameters do not
contribute much to the simulated data's correlation structure. This explains why
increasing f does not significantly affect the test's ERP. Thus, the ARMA sieve has
one important advantage over ARSB and MASB, which is that it is much more par
simonious in the sense that it requires the estimation of many fewer parameters to
achieve similar performances.
Secondly, a comparison of the roots of the average AR and MA polynomials of
the ARMA sieve reveals a clear tendency for larger roots to cancel out. Table
3.4 shows the roots and modulus of two ARMA(p,q) models when the true DGP
is the ARFIMA(O,d,l) with 8=-0.9. An the roots were computed using the numerical
method of Weierstrass (1903).
70

TABLE 3.4 Roots of AR and MA polynominal of ARMA sieve model.
Root 1 Mod 1 Root 2 Mod 2 Root 3 Mod 3
(2.2) AR -2.00 2.00 4.19 4.19 n.a. n.a.
MA 1.16 1.16 4.51 4.51 n.a. n.a.
(3.3) AR -1.86 -1.86 2.27+-2.7i 3.53 2.27-+2.7i 3.53
MA 1.13 1.13 2.34+-3.26i 4.01 2.34-+3.26 4.01
It can be se en that, in aIl the cases considered in table 3.4, the larger roots in
modulus tend to be of the same signs and to have similar modulus. For example, in
the ARMA(2,2) case, we have positive roots of 4.19 and 4.51 for the AR and MA
polynomials respectively. Similarly, in the ARMA(3,3) case, we have two positive
complex roots with modulus 4.01 and 3.52. These evidently almost cancel each other
out. What results is a process that has a correlation structure quite similar to that
of the ARMA(I,I), which has a unique root of 1.14, which is almost identical to the
roots of 1.16 and 1.13 reported in table 3.4. Similar patterns were observed for aIl
ARMA(e,e) models for e = 1, ... , 10.
Since most higher order parameters appear to be insignificant, and because we
have reasons to believe that high orders for the AR and MA parts may result in the
two partially cancelling out, the next logical step is to study small order models more
closely. Figure 3.16 shows the size function of 3 ARMA(p,q) sieve bootstrap tests
conducted using 2 500 Monte Carlo samples of the ARFIMA(O,d,l) DGP with (X=-
0.9, a case where the ARMA(10,1O) sieve experiences sorne difficulties, recall figure
3.4, and 499 bootstrap replications each.
71

Figure 3.16. Size function, ARFIMA(1,d,0), 0;=-0.9, n=200.
0.45
0.4
0.35
0.3
a.. 0.25 n::
0.2
0.15
0.1
0.05
••• ARMA(1,2)
- - ARMA(3, 1) -ARMA(3,2)
O+-------T--.-·---·----,-------.-------r------·~-··--~~
0.01 0.06 0.11 0.16 Nominal Size
0.21
Figure 3.17. Size function, ARFIMA(1,d,0), 0;=-0.9, n=200.
0.7.,··································
0.6
0.5
0.4 a.. n::
0.3
0.2
0.1
0.26
o~------~------~-------.-------.-------.----~
0.01 0.06 0.11 0.16 Nominal Size
0.21 0.26
The most parsimonious model among those considered, namely the ARMA(1,2),
has the lowest ERP. In fact, its ERP at nominallevel 10% is a mere 0.035, compared
72

to 0.063 for the MA(10) sieve. Figure 3.17 above compares the RP of these two tests
for nominal levels from 0.01 to 0.30. While the two procedures yield similar RPs
at lower nominal levels, it is obvious that the ARMASB is more accurate at higher
levels.
Since it appears that the ARMASB's accuracy is greatly infiuenced by its order,
it is important to use an efficient selection method. Most of aIl, this method should
be able to choose the ERP minimizing specification. Also, in light of what we have
seen, it is preferable that it would not tend to over-fit.
3.3.6 The block bootstrap
We now compare the properties of the ADF unit root test conducted with the different
sieve bootstrap methods studied in this chapter to those of the same test based on a
version of the block bootstrap. We use the residual based block bootstrap (RBB) of
Paparoditis and Politis (2003) with over-lapping blocks. This method is based on the
resampling of blocks of the partial difference series D.Yt = Yt - PYt-l, where p is some
consistent estimate. Using this instead of the usual first difference is inoffensive, at
least asymptotically, under the null hypothesis that p=l, but allows for a gain of power
because, whenever p =Il, it is the partial difference that follows a stationary general
linear process, not the first difference. Paparoditis and Politis (2003, theorem 5.2 and
corollary 5.2) show that using first differences to build block bootstrap samples when
the alternative is true results in the bootstrap statistics diverging to minus infinity.
This evidently causes a loss of power. U sing !:lYt instead of the first difference fixes this
problem and, consequently, increases power. In small samples, the cost of this gain
of power is a loss of accuracy under the null hypothesis resulting from the fact that
the null is no longer being imposed. The response surface study of Palm, Smeekes
and Urbain (2006) confirm this by showing that ARSB and block bootstrap ADF
73
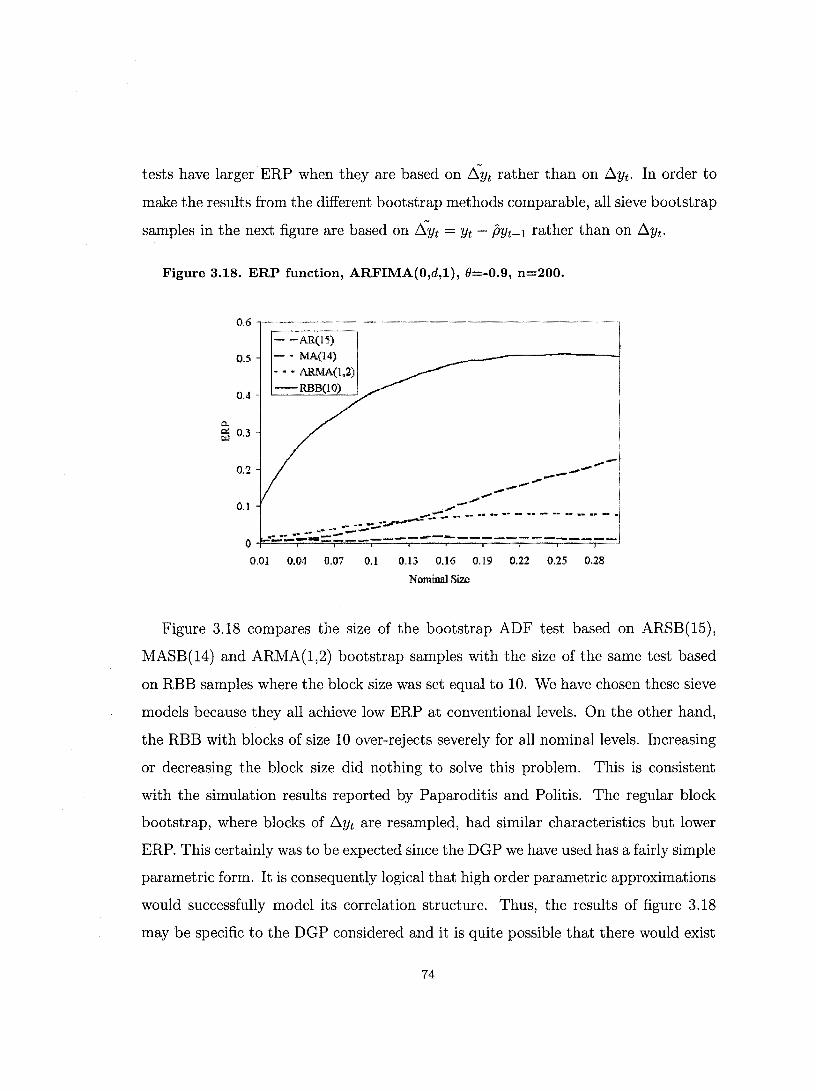
tests have larger ERP when they are based on ;SYt rather than on !::l.Yt. In or der to
make the results from the different bootstrap methods comparable, aH sieve bootstrap
samples in the next figure are based on !::l.Yt = Yt - PYt-l rather than on !::l.Yt.
Figure 3.18. ERP function, ARFIMA(O,d,l), 8=-0.9, n=200.
0.5
0.4 -
gz ti.l 0.3
- -AR(15)
- - MA(14) ••• ARMA(1,2)
-RBB(lO)
0.01 0.04 0.01 0.1 0.13 0.16 0.19 0.22 0.25 0.28
Nominal Size
Figure 3.18 compares the size of the bootstrap ADF test based on ARSB(15),
MASB(14) and ARMA(1,2) bootstrap samples with the size of the same test based
on RBB samples where the block size was set equal to 10. We have chosen these sieve
models because they aH achieve low ERP at conventional levels. On the other hand,
the RBB with blocks of size 10 over-rejects severely for aH nominallevels. Increasing
or decreasing the block size did nothing to solve this problem. This is consistent
with the simulation results reported by Paparoditis and Politis. The regular block
bootstrap, where blocks of !::l.Yt are resampled, had similar characteristics but lower
ERP. This eertainly was to be expected sinee the DG P we have used has a fairly simple
parametric form. It is consequently logical that high or der parametric approximations
would suceessfuHy model its correlation structure. Thus, the results of figure 3.18
may be specifie to the DGP considered and it is quite possible that there would exist
74

situations in which the RBB would have better properties than any one of our sieve
bootstraps.
3.3.7 Power
This subsection looks at the power characteristics of the competing bootstrap meth
ods. Figure 3.19 shows the size power curves of the bootstrap ADF test based on
ARSB(15), MASB(14) and ARMA(1,2) bootstrap samples as weIl as RBB samples,
where the block size was set equal to 10. The reason why these particular sieve mod
els were chosen is that they have similar rejection probabilities under the null, which
makes the comparison more straightforward.
We use size-power curves to illustrate the properties of a test, an ide a which was
proposed by Davidson and MacKinnon (1998). These curves are built by estimating
the EDF of the p-value of the test under the null (calI this EDF Fn) and under a
specific alternative (calI this EDF Fa) and by plotting the pair (Fn, Fa) in the unit
square. This aIlows to plot power against true size, which makes power comparison
between two tests straightforward. lndeed, whenever the curve of one test is above
that of another for a given point on the horizontal axis, say z, one can say that
the former test is more powerful than the latter wh en the true size of the test is z.
Size-power curves are especially useful when one wants to compare two tests with
different ERP under the nuIl because they effectively provide an easy way to obtain
size-adjusted power for aIl sizes at once.
75

Figure 3.19. Size-power curves, ARFIMA(O,d,l), 0=-0.9, n=200.
0.9
0.8
0.7
M !il ~ 0.5
Cl:.
0.4
0.3
0.2 :/
0.1
0
0 0.2 0.4 0.6
Size
-AR(15)
- -lv1A(14) ••• ARMA(1,2)
- - RBB(IO)
0.8
Figure 3.19 was generated using 2 500 Monte Carlo samples with 999 bootstrap
repetitions in each. The alternative hypothesis was Yt = 0.9Yt-l + Ut and the same
random numbers were used to create the null and alternative data in order to minimize
experimental error. It shows that the ADF test based on the ARSB has more power
then any of the other three tests, including the RBB. This last finding is consistent
with the results of Palm, Smeekes and Urbain (2006).
Since they are compared with the RBB, it is interesting to look at the performances
of the sieve bootstrap tests when they are based on resampling !J.Yt = Yt - PYt-l rather
that !J.Yt. This has been shown to yield consistent ADF tests in the case of the ARSB
(see Palm, Smeekes and Urbain (2006)). Because their proofs are adaptations of
the proofs of Park (2002) and Chang and Park (2003), we believe that it would be
relatively easy to show the same thing for our MASB and ARMASB.
76
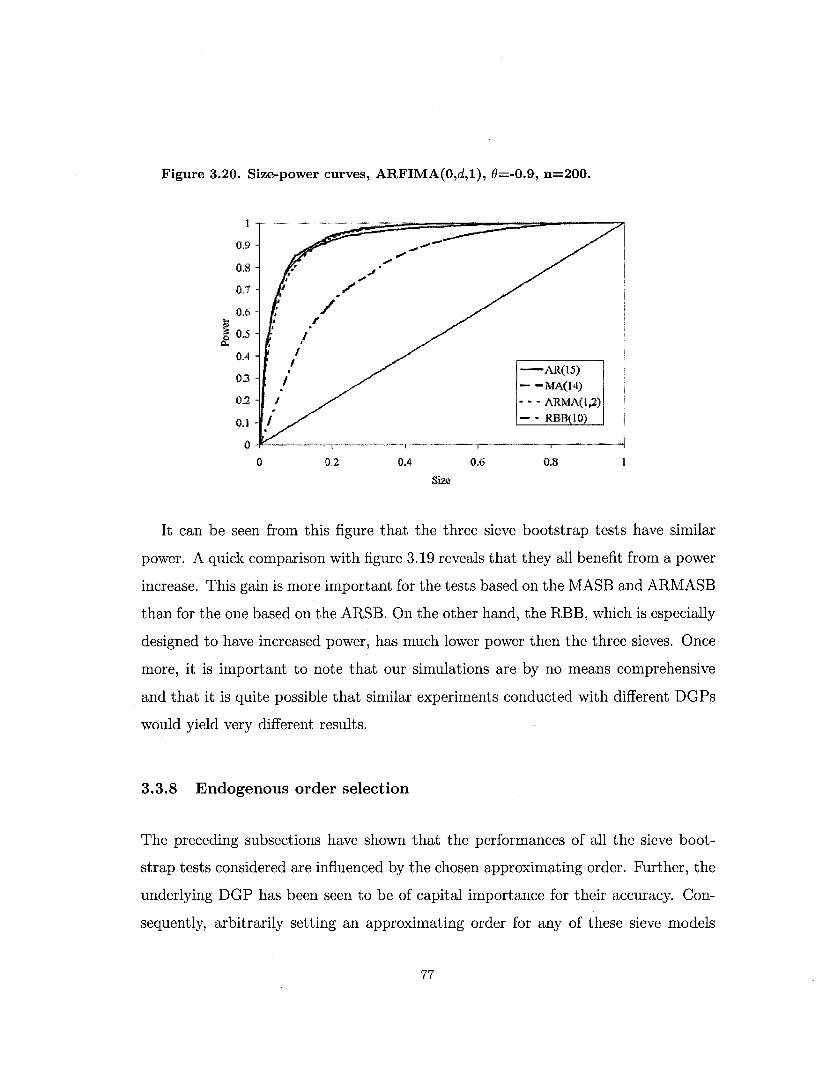
Figure 3.20. Size-power curves, ARFIMA(O,d,l), 0=-0.9, n=200.
0.9
0.8
0.7
0.6 ~ ~ 0.5
Q;.
0.4
0.3
0.2
0.1
()
1
0
J
1 1
-AR(lS)
- -MA(l4)
- - - ARMA(l,2)
- - RBB(lO)
0.2 0.4 0.6 0.8
Size
It can be se en from this figure that the three sieve bootstrap tests have similar
power. A quick comparison with figure 3.19 reveals that they all benefit from a power
increase. This gain is more important for the tests based on the MASB and ARMASB
than for the one based on the ARSB. On the other hand, the RBB, which is especially
designed to have increased power, has much lower power then the three sieves. Once
more, it is important to note that our simulations are by no means comprehensive
and that it is quite possible that similar experiments conducted with different DGPs
would yield very different results.
3.3.8 Endogenous order selection
The preceding subsections have shown that the performances of all the sieve boot
strap tests considered are infiuenced by the chosen approximating order. Further, the
underlying DG P has been se en to be of capital importance for their accuracy. Con
sequently, arbitrarily setting an approximating or der for any of these sieve models
77

without regards to the sam pIe characteristics may prove to be a fatal error. In this
subsection, we explore the use of data based order selection methods on the accuracy
of the different tests. It is well known that the AIC criterion is consistent when the
DG P of the data is an infinite order model. We therefore favour this criterion.
Our simulations are based on the ARFIMA(p, d, q) DGP with d = 0.45 and dif
ferent values of Πand O. The sieve models are chosen by the Akaike Information
Criterion (AIC). We have used 2500 Monte Carlo samples with 499 bootstrap sam
pIes for each replications. The maximum orders were 15 for the ARSB and MASB
and 10 for both the AR and MA parts of the ARMASB. The resulting ERP functions
for the 3 DGPs at nominal sizes between 1% and 30% are shown in figures 3.21 to
3.24 respectively. We have run two sets of experiments. In the first, we compare
RPs of tests based on AR(p), MA(q) and ARMA(p,q) sieve models where p and q
are restricted to be integers greater than 0 and smaller than 15 for the AR(p) and
MA(q) and 10 for the ARMA(p,q). In the second set, we simply let the AIC choose
whatever ARMA(p,q) model it deems better fitting without any lower restrictions on
p and q. Thus, the ARSB and MASB are nested into the ARMASB. Figures 3.21 to
3.23 report the results of the first set while figure 3.24 reports those of the latter.
78

Figure 3.21. ERP function, ARFIMA(O,d,l), 8=-0.9, n=200.
0,7
0,6
0,5
0.4 ~ f.I.l
0.3
. 0.2 1
1 .. 0.1
. . ---0
0.01
..... -'"'" ." . .. __ .<Ii .Il! ... _ .. lOI .- .... "" .* .. - ....... IllE • • - ...
~R
--MA ••• ARMA
---.,-----_ ........ ----------..... ---
0,06 0.11 0.16 0.21 0.26
Nominal size
Figure 3.21 shows the ERP functions of the three tests when the first difference is
generated by the ARFIMA(O,d,1). In accordance with the results presented ab ove ,
the presence of the large negative MA parameter causes the ARSB to strongly over
reject for all nominal sizes considered here. This is an illustration of the fact pointed
out by Ng and Perron (1995) that AIC tends to under-specify AR models when a
large negative MA parameter is present in the DG P. Here, the average AR sieve or der
turned out to be 7.78, with a standard deviation of 2.22. It also cornes as no surprise
that the MASB has, in comparison, very small ERP. This follows from the fact that
it is able to directly model the MA root. It should also be noted that it achieves this
while using less information since AIC selected an average order of 4.8 with a standard
deviation of 2,87. The behaviour of the ARMA sieve's ERP is most puzzling, While
it only over-rejects by 4.1 percent at the 1% nominal size, which is little more than
twice as often as the MASB and 7 times less often than the ARSB, its ERP quickly
climbs as the nominal size increases and reaches 0.46 at the 10% nominallevel, which
is 7.5 times more often than the MASB and almost as often as the ARSB. In fact,
79

it surpasses the ARSB around 11% nominal level. One explanation for this is that,
according to our previous simulations, there may be only one specification that yield
low ERP. AIC selected an average p of 2.4 and an average q of 1.6 with standard
deviations of 1.54 and 1.36 respectively. These estimates may not correspond to
the orders that minimizes ERP. It would therefore appear that AIC is not the best
criterion to select the ARMASB specification.
Figure 3.22. ERP function, ARFIMA(l,d,O), 0:=-0.9, n=200.
~ ...
0.5
0.4
0.3
.. 0.2 , .. 0.1 . . .
~
.~
-" ." ."
....... - .. _ .!Ii _'" - ........... -- ... ..
~ --MA
• •• AlUvlD.
o~----~-----r-===~==~==?=-=~~--~ ---O. l "[OO----4.U ___ ..o.16 0.'21 0.26 -------_ .... __ .... -
Nominal sim
Figure 3.22 shows the ERP function of the three tests when the first difference
is generated by an ARFIMA(l,d,O). Again, as expected, the presence of the large
negative AR parameter is accompanied by a very adequate performance of the ARSB,
which has virtually no over-rejection. The MASB also performs quite well, though
it under-rejects at an nominal sizes considered, which hints at a lack of power. On
average, the AIC has selected a lag or der of 2.48 for the ARSB, which confirms
that the large AR root is the important thing to capture, while the MASB had an
average or der of 10.32. Hence, it is most probable that the MASB's under-rejection
results from excessive over-specification of the first difference model. Once again, the
80

ARMASB severely over-rejects for an considered nominal sizes. The average orders
chosen by the Ale are here 2.03 for the AR part and 1.82 for the MA part.
Figure 3.23. ERP function, ARFIMA(l,d,l), a=B=-0.4, n=200 .
.. . -0.4
0.3
~ 0.2
0.1
"" .. -.. -- -- - -- .- -.... '.,._ ..... ,.,-
-AR
--MA ~ •• ARMA
o~----~------.-----~------.------.----~ --O. l -1J.œ----&.:H---"1tt1S---"O.:u-__ ~.2.(i---
-0.1
Figure 3.23 shows the ERP function of the three tests when the first difference
pro cess is generated by an ARFIMA(l,d,l). The features of this figure are almost
identical to those of figure 3.22. Indeed, the ARMASB still over-rejects, for the
reasons given above. The MASB, which has an average order of 5.02, under-rejects
once more, though much less severely than in the preceding case. The only notable
difference is the ARSB's over-rejection over the whole nominallevel range considered.
For low nominal levels, it over-rejects by a proportion similar to that by which the
MASB under-rejects (for example, RPs of 0.144 and 0.0588 at 10% for the ARSB
and MASB respectively). The most likely reason is that the ARSB is slightly under
specified (average or der of 3.27) while the MASB is slightly over-specified (average
order 5.02). It is worth noting that the ARSB's over-rejection increases with the
nominallevel while the MASB's under-rejection remains roughly constant.
81

While it is true that, in practice, one might want to use several sieve models to
generate bootstrap samples, it seems logical to give precedence to the results of the
one model which best satisfies some selection criterion within a class of models. In the
three figures ab ove , we have considered three classes of models separetely, namely,
the AR(p), MA(q) and ARMA(p,q) family and have imposed the restriction that
p and q should be non-zero. Because these three classes of models are parametric
approximations, it is natural to wonder what would happen if we were to select one
model among them aIl. Thus, we have run simulations where the sieve bootstrap
tests are conducted using the best fitting ARMA(p,q) model with p 2:: 0 and q 2:: 0 as
selected by AIC. Evidently, the ARSB and MASB are thus nested in the ARMASB.
We have only used one DGP, namely the ARFIMA(O,d,l) with 0=-0.9. In figure 3.24,
we plot the ERP function of the ARMASB test just described, which we label as
ARMA(general) and compare it with the results reported in figure 3.21. It is obvious
from the figure that allowing for more fiexibility in the model selection pro cess does
not ameliorate the ARMASB's ERP problem at aIl.
Figure 3.24. ERP function, ARFIMA(O,d,l), 8=-0.9, n=200.
&! l.Ll
0.7
0.6
0.5
0.4
0.3
/ 0.2 ..
/ 0,1
... - ",,,,"
----------------"" 'fIII,..:::.--------------7
/ ~/
/ ./
~/
_ ....... ,.. lit.·'" "" ....... --- ",- .... -
- ARMA(general) --AR
- - - MA - - ARMA
.... ",. - ........ -- -- -- .... ",- "''''
O+---.----,---.---.---.----r---.---.----,~
0.01 0.04 0.07 0.1 0.13 0.16 0.19 0.22 0.25 0.28
Nominal sire
82

The AIC sometimes appears to over-specify the MA sieve and under-specify the
AR sieve. Further, it clearly does not choose the right ARMA order to minimise
ERP. It therefore do es not seem to be a very good selection criterion for our present
purposes. It is interesting to take a closer look at the distribution of the chosen orders
of the ARMA sieve model. Of particular interest is the fact that, whenever p > 1,
then q = 1 and conversely, whenever q > 1, p = 1. This has happened in all the
Monte Carlo samples. Also, it is interesting to note that AIC never selected p = 0
or q = 0 in the last set of experiments where it is used to choose any model in the
ARMA(p,q) class. This explains at least in part the disappointing results observed
in figure 3.23. Because of their great similarity, it is doubtful that the BIC would
provide more precise inference. Since it has a more severe penalty function, it should
be expected to choose lower average orders. This may or may not be beneficial for
the MASB and ARMASB, but certainly not for the ARSB.
Thus, usual selection criterions appear to be inappropriate to choose a specification
for general ARMA(p,q) sieve model. In light of what we have seen, the ARMASB
often experiences problems because it is over-specified and the roots of higher order
AR and MA polynomial tend to cancel each other out. It may therefore be possible
to devise a selection method that would be based on this root near-cancellation. We
do not explore this issue here.
3.4 Correlation of the error terms
We now return to the observation made earlier to the effect that the poor performances
of the ARSB may be due to its incapacity to generate correlated errors in the ADF
regression. It is wen known that the distribution of the DF (or ADF) test shifts to
the le ft when the DF (or ADF) test regression has correlated residuals. For example,
figure 3.25 shows the distribution ofthe DF test conducted on 100 observations of an
83

integrated series with first difference !J.Yt = (}st-l + St for several values of e.
Figure 3.25. Distribution of DF test, several (J.
l§].~'~." -0.8
--0.6 --004
-DF
3 .... J
It is therefore clear that, in or der to reduce ERP, a sieve bootstrap test procedure
must not only emulate the driving pro cess of the original data, but also replicate the
correlation structure of the residuals of the original ADF regression equation, so that
its distribution is properly shifted to the le ft with respect to the DF. Figure 3.26
compares the distribution of the AR(lO), MA(lO) and ARMA(lO,lO) sieve bootstrap
ADF tests with the DF and the actual test's distribution. The bootstrap distributions
are based on 1000 Monte Carlo samples and 499 bootstrap samples per repetitions
while the other two were generated from 500 000 Monte Carlo repetitions. The DGP
was the ARFIMA(O,d,l) used above with a MA parameter of -0.9, which correspond
to a situation where the AR sieve and asymptotic tests over-reject by over 20% and
the ARMA and MA sieve tests over-reject by less than 5% at the 5% level.
84
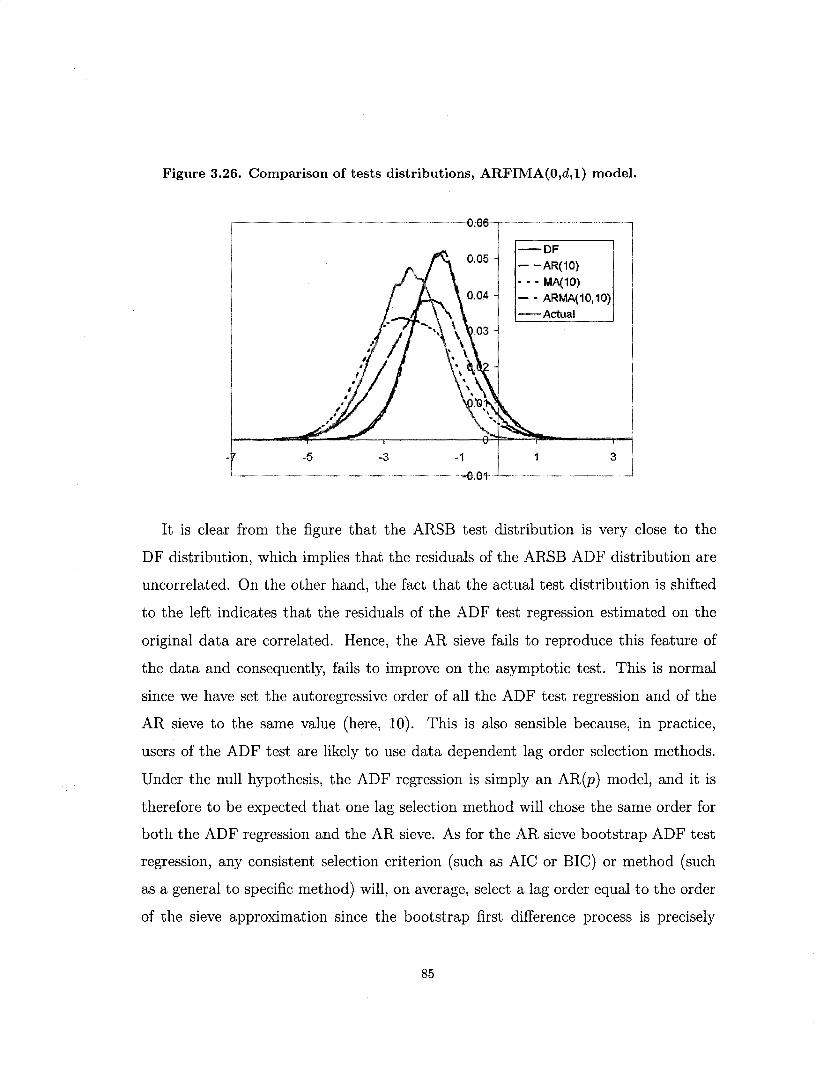
Figure 3.26. Comparison of tests distributions, ARFIMA(O,d,l) model.
-DF 0.05
- -AR(10)
- - - MA(10) - - ARMA(10,10) -Actual
-5 -3 -1 1 3 1
~-,-~-~~,~~,-,~, ,,~,"~'''~-''~'''~-,-,~~''~~~ ," ~"~O:O'l ,,/
It is clear from the figure that the ARSB test distribution is very close to the
DF distribution, which implies that the residuals of the ARSB ADF distribution are
uncorrelated. On the other hand, the fact that the actual test distribution is shifted
to the left indicates that the residuals of the ADF test regression estimated on the
original data are correlated. Hence, the AR sieve fails to reproduce this feature of
the data and consequently, fails to improve on the asymptotic test. This is normal
since we have set the autoregressive order of an the ADF test regression and of the
AR sieve to the same value (here, 10). This is also sensible because, in practice,
users of the ADF test are likely to use data dependent lag order selection methods.
Under the nun hypothesis, the ADF regression is simply an AR(p) model, and it is
therefore to be expected that one lag selection method will chose the same or der for
both the ADF regression and the AR sieve. As for the AR sieve bootstrap ADF test
regression, any consistent selection criterion (such as AIC or BIC) or method (such
as a general to specific method) will, on average, select a lag order equal to the order
of the sieve approximation since the bootstrap first difference pro cess is precisely
85

of this finite order. In fact, sinee this order is known, it makes very litt le sense to
use a selection method at all, sinee this would only introduee more randomness and
a higher probability of making an inference error. The only logical course of action
therefore appears to be to set the AR sieve bootstrap regression's lag order equal to the
AR sieve order. Unfortunately, our simulations unambiguously demonstrate that this
sometimes causes the test to over-reject as much, when not more, than the asymptotic
one. On the other hand, figure 3.26 shows that the MA and ARMA sieve ADF test
distributions are quite close (though much flatter) to the test 's actual distribution.
This indicates that the correlation found in the residuals of their respective ADF
regressions is similar to that which exists in the residuals of the original test regression.
Figure 3.25 indicates that the leftward shift of the actual DF test distribution
(and also of the ADF test distribution) is a function of the amount of correlation
not modelled by the ADF regression. Thus, one way to look at this problem is to
recognise that the ERP of the ARSB test is function of the amount of unmodelled
correlation present in the residuals of the original ADF regression and absent from
the residuals of the ARSB ADF regression. Renee, if we could suceessfully model
that seriaI dependenee, the ERP would disappear. Unfortunately, this is not possible
because this dependenee is of infinite order. It is nevertheless possible to approximate
it arbitrarily well using a finite order model.
In or der to accomplish this, we propose to use a sm aller lag length in the ARSB
ADF regression than in either the ARSB model and the original ADF regression.
Precisely, we suggest that we continue to use the same lag or der in both the ARSB
and original ADF regression, say p, but to use a smaller or der in the ARSB ADF
regression, say k. Thus, the errors of the ARSB ADF regression are AR(p - k). By
letting k --+ ()() at a rate function of n but slower than that of p, i.e. such that k/p --+
0, we ensure ourselves that 'this AR(p - k) proeess is a consistent sieve approximation
of the AR( ()()) proeess driving the residuals of the original ADF regression. This
86

is because, as the difference between k and p increases, the unmodelled AR(p - k)
pro cess present in the errors of the ARSB ADF regression approaches the AR( 00)
pro cess present in the residuals of the original ADF regression while at the same time,
more correlation is being modeled by the ADF regression and ARSB model.
This ide a is somewhat reminiscent of subsampling, also known as the m out of
n (moon) bootstrap. This method was introduced by Politis and Romano (1994)
and applied to unit root tests by Swensen (2003) and Parker, Paparoditis and Politis
(2006). In short, it consists of using the bootstrap to generate samples of size m by
drawing from an original sample of size n where n > m. At the risk of oversimplying
it, this is done so that the passage from the actual sam pIe to the bootstrap sam pIe
resemble the passage from the DGP to the actual sample. It has been shown to be
valid in cases where the regular bootstrap is not, for example, when the data has
infinite variance, and to be valid, though less efficient, when the regular bootstrap
works. However, the similarity between the moon bootstrap and the method proposed
here does not seem to be anything more than coincidental.
Figure 3.27 shows the ERP of the ARSB ADF test at nominallevel 5% for different
values of () in the ARFIMA(O,d,l) DGP used above. Here, 10 lags are used in the
ARSB model and in the original data's ADF regression but k lags are used in the
ARSB ADF test regression.
87

Figure 3.27. ERP plot, ARFIMA(O,d,l) model, n=200.
0.8
0.7
tEJ 0.6 - -k=7 •• 'k=5
0.5
~ 0.4
0.3
0.2
0.1
0
0.95 -0.65 -0.35 -0.05 0.25 0.55 0.85 -0.1
Theta
It is quite obvious from this picture that the proposed scheme substantially reduces
the ARSB ADF test's ERP when (J is close to -1. On the other hand, it appears
to have only a very small effect on the test for other values of (J. This makes sense
because these pro cesses have infini te, yet not too severe dependence, so that the higher
order correlations can be ignored without much loss. In other words, the correlation
contained in the omitted p - k last lags of the ARSB is not very strong, just like the
correlation not modelled by the ARSB model, so that the ARSB ADF residuals have
characteristics similar to those of the original ADF regression. FinaUy, the figure
confirms that the incapacity of the usual ARSB to provide appreciable amelioration
over the asymptotic test is partly due to the fact that its ADF regression does not
have correlated residuals.
Figure 3.27 makes clear the fact that the modified ARSB test's ERP is dependent
on the difference between p and k. Closer inspection of the curve reveals that the
magnitude of the effect of p - k on the ERP is not the same for aU (Js. In order to
study this point further, we have used simulations to generate the ERP as a function
88

of p - k for different values of e. This is presented in figure 3.28.
Figure 3.28. ERP plot, ARFIMA(O,d,l) model, n=200.
0.3
0.25
~ -·0.6 , 0.2 • - -0.2
, 0.15 ,
~ 0.1 ILl '\ ,
0.05 • \ • , ,
0
10 9 8 7 6 .5 2 ·0.05 -""'--
·0.1
k
The sensitivity of the ERP to the difference between p and k is evidently greatly
dependent on the underlying DGP. In particular, it is interesting to notice that in
both models with rather strong correlation, the ERP converges to -5%, which means
that the test never rejects the null hypothesis, while it remains stable around 0 for
the third DGP which has very weak correlation. This fact is most likely due to the
ratio of the importance of the correlation left in the original data's ADF regression
residuals to that of the ARSB ADF regression residuals. It is indeed natural to
expect that the test should start to under-reject whenever there is more correlation
in the sieve bootstrap ADF regression's residuals than in those of the original ADF
regression because the sieve bootstrap test distribution would then be located to the
left of the true distribution. This reasoning makes clear the fact that the proposed
method is more robust to the choice of p - k when the DGPs correlation is weak.
This is supported by figure 3.26.
89

A very illuminating example is the curve corresponding to the DGP with 0=-0.6.
The ADF regression includes 10 lags and so does the ARSB model. For this DGP,
the correlation between llYt and llYt-s is relatively strong for low s but dies down
somewhat quickly as s increases. It therefore appears likely that the residuals of the
original ADF regressions are almost uncorrelated. This explains why the standard
ARSB works well. As the differenee between p and k increases, the correlation cap
tured by the p - k lags of the ARSB model moves into the residuals of the ARSB
ADF regression. Because the correlation structure dies down rapidly, these last p - k
lags do not represent much dependence, so that the ADF regression's residuals remain
roughly uncorrelated. Renee, the ERP remains low. As p- k increases however, more
correlation gets transferred to the residuals of the sieve bootstrap ADF regression.
As this happens, the sieve bootstrap test distribution shifts to the left and its critical
values thus become larger in absolute value. This inevitably causes under-rejection.
As this process goes on, ie: as the difference p - k increases, the severeness of the
under-rejection becomes greater. Eventually, a point is reached where the bootstrap
distribution is so far to the left that rejection does not occur anymore.
Because using k < p lags in the ARSB ADF regression shifts the bootstrap test's
distribution to the left, we should expect it to cause a loss of power. In view of the
results of figures 3.25 and 3.26, we should expect this power loss to increase with
the difference between p and k and to happen more abruptly for strongly correlated
proeesses. These intuitions are confirmed in figure 3.29.
90

Figure 3.29. RP plot under alternative, ARFIMA(O,d,l) model, n=200.
0.9 - --0.95 - - '-0,75
0.8 --0,55 -O,3S -..(l,IS
0.7
0.6
~ 0.5
0.4
0.3
0.2 .
0.1
0
2 3 4 5 6 7 8 9
P·K
These curves were generated using 1000 replications of the ARFIMA(O,d,l) DGP
with () ranging from -0.95 to -0.05. The bootstrap tests were carried out using 499
replications per sample and have nominal level 5%. The curves show the rejection
probability of the unit root hypothesis when Yt = 0.8Yt-1' No size adjustment was
performed because our goal sim ply is to show that the effects of () and p - k are
the same for aU the DGPs used. Other simulations performed with different DGPs
yielded similar results. The most interesting feature here is the fact that nominal
power is very high for aU cases when p - k is smaU but decreases rather fast as p - k
increases. For large enough p - k, rejection does not occur anymore.
The major problem with this procedure is therefore that it is very sensitive to
the choice of k. Unfortunately, it is not clear how it should be chosen. A similar
problem is also sometimes encountered wh en using subsampling methods (see figure
8 of Davidson and Flachaire (2004) for a convincing example of this fact). Since small
differences between p and k have been shown to significantly reduce ERP when there
is over-rejection and not to reduce power dramatically, such choices are probably
91

preferable.
3.5 A modified fast double bootstrap
Another possible course of action is to use a modified version of the fast double
bootstrap (FDB) introduced by Davidson and MacKinnon (2006a). The FDB is
inspired by the double bootstrap proposed by Beran (1988). Let G(x) denote the
CDF of the bootstrap test's P value and F(T) and F(T*) be the original test and
bootstrap test CDFs respectively. Then, in the ideal case where F(T)=F(T*) and
B=oo, G(x) simply is U(O,l). In reality, G(x) is not known and can be quite different
from the U(O,l). The double bootstrap attempts to estimate G(x) by generating B'
second level bootstrap samples for, and based on, each first level bootstrap samples.
Thus, every first level bootstrap test statistics fj is accompanied by B' second level
bootstrap statistics, fD. This aIlows us to compute a set of B second level bootstrap
P values pj* which are used to obtain an estimate of G(x). The double bootstrap P
value is then calculated as:
p**(f) = ~ tI (pt:::; p*(f)) j=l
where B is the number of first level bootstrap samples used, pj* is the second level
bootstrap P value corresponding to the lh first level bootstrap sample and p* (f) is
the first level bootstrap P value.
Evidently, if the CDF G(x) is indeed U(O,l), then, if B' and B are infinite,
p** ( f) =p* ( f). On the other hand, suppose that the first level bootstrap test tends
to over-reject. This means that F( f*) generates too few extreme values of the test
statistic compared to F(f). Henee, p* tends to be too low. On the other hand, if
F(f**) also generates too few extreme test statistics with respect to F(f*), then pj*
will tend to be too low as weIl as compared to p*. Thus, the double bootstrap P value
92

will be, on average, higher than p* and, consequently, the double bootstrap test will
not over-reject as much as the bootstrap one.
Although the ide a of the double bootstrap is quite compelling, it has one major
drawback in that, in order to achieve any level of accuracy, it requires that both Band
B' be large enough. This is quite unfortunate because, for each first level bootstrap
sample, we must compute B'+l statistics. Hence, to carry out a double bootstrap
test, l+B+BB' test statistics must be computed. For large Band B', the computer
co st is prohibitive. The fast double bootstrap (FDB) of Davidson and MacKinnon
(2006a) is designed to do the same thing as the double bootstrap, but with a much
lower computational cost.
The FDB consists of drawing one second level bootstrap sample from each first
level bootstrap sample and calculating the relevant test statistic from each of these
samples. What results is a set of B first level bootstrap statistics, which we call f* and
a set of B second level bootstrap statistics, which we call f**. Then, for a one-tailed
test that rejects to the left, the FDB P value is calculated as follows:
P** = ~ t l (f* < Q * (f>*») , j=l
where p* is the first stage bootstrap P value and Q*(p*) is the 1-p* quantile of the
f** and is defined implicitly by the equation:
The reasons why the FDB and double bootstrap can yield more precise inference
than the simple bootstrap are quite similar. Suppose that our bootstrap test over
rejects, as is the case here. What this implies is that its P value, p* is too low or,
equivalently, that the statistics fj tend to be too low as compared to f. In other words,
calculating the statistic T on a data set generated by the bootstrap DGP results in
statistics fj which are, on average, lower than the statistics we would obtain from the
93
DGP of the original data. If going from the original DGP to the first level bootstrap
DGP yields lower test statistics, then it is possible that going from the first level
bootstrap DGP to the second level bootstrap DGP will yield statistics ft that will A*
be, on average, even lower still. If this is the case, then it is easy to see that Q (p*) A*
will be less extreme than f, the original test statistic. Consequently, using Q (p*)
instead of f to calculate the P value of the test should reduces the over-rejection. Of
course, for this to work, it is necessary that the same relationship exists between the
first and second level bootstrap DGPs as between the original DGP and the first level
bootstrap DGP and that the first and second level bootstrap statistics distribution
be independent. The first condition is necessary for the double bootstrap to work as
well, while the second is only necessary for the FDB.
There is no reason why we should expect the ordinary FDB, or the double boot
strap for that matter, to decrease the ERP of the ARSB ADF test if we use an AR(p)
sieve in the two stages of the procedure. Indeed, in such a case, the second level
AR(p) model will not be a sieve at all since the first level bootstap DGP is an AR(p)
model. Rence, the very reason why the ARSB over-rejects is effectively removed and
we should not expect the distribution of the second stage bootstrap statistics to be
any different from the distribution of the first stage ones. Thus, using the FDB in
this manner should yield a test with roughly the same size-discrepancy function as
the ARSB test but with more variability. This fact is illustrated in figure 3.30, which
compares the RP functions of the ARSB and FDB ARSB ADF tests when the true
DGP is the ARFIMA(O,d,l) considered above with 8=-0.95. To generate this figure,
we have used 2000 Monte Carlo samples of size 200 and the number of bootstrap rep
etitions was B=499. It is obvious that the usual FDB does not bring any significant
accuracy gain over the simple ARSB test.
94

Figure 3.30. ERP plot MFDB vs. ARSB, ARFIMA(O,d,l) model, n=200.
0.9
0.8
0.7
0.6 .
&: 0.5
0.4
0.3
0.2.
0.1
•• -ARSS(10)
- - FDS ARSB(10)
O~~---r--,-~r-~--~--r-~--~--~-'--~
0.01 0.03 0.05 0.07 0.09 0.11 0.13 0.15 0.17 0.19 0.2.1 0.2.3 0.25 Nominal size
In the present context, we know that the ARSB test's over-rejection is due to its
incapacity to reproduce the correlation structure of the residuals of the original ADF
regression. It seems logical to try to use this knowledge to devise a more accurate
test, in a manner similar to what was done in the preceding section.
We propose the following modified fast double AR sieve bootstrap (MFDB ARSB)
scheme. In the first stage, we calculate the ADF test statistic f using an ADF
regression with p lags and fit the usual AR(p) sieve model to the first difference
process !::,.Yt. Using the AR(p) model, we generate the bootstrap sample !::"Y: in the
usual manner and calculate the first level ADF bootstrap statistics f* using an ADF
regression with k < p lags. Then, we fit an AR( k) sieve model to !::"y: and generate
a second level bootstrap sample !::"yr. We then calculate the second level ADF
bootstrap statistic f** using an ADF regression with k lags. We therefore obtain two
sets of B bootstrap statistics, and we use them to compute a P value exactly in the
same manner as for the normal FDB.
95

Figure 3.31. RP plot MFDB, ARFIMA(O,d,l) lllodel, 0=-0.95, n=200.
0.9
0.8
0.7
0.6
;i: 0.5
004
0.3
0.2
0.1
... -.... -... -_ .... - ..... -_. _ ... - ... .- .. .. " .. " .. -
---•• 'ARSB(10)
-ARSB(9)
--
- • MFDB ARSB 9)
-----
O~~r--'---r--~--~--r-~---r--'---~--r-~
0.01 0.03 0.05 0.Q7 0.09 0.11 0.13 0.15 0.17 0.19 0.21 0.23 0.25
Nominal f,ize
Figure 3.32. RP plot MFDB, ARFIMA(O,d,l) lllodel, 0=-0.80, n=200.
OA
0.35
0.3
0.25
;i: 0.2
0.15
0.1
0.05
•• 'ARSB(IO)
-ARSB(9)
- • MFDB ARSB(9)
O+---r--.---'--'---.--'---r--.---~-'r--.--~
0.01 0.03 0.05 0.Q1 0.09 0.11 0.13 0.15 0.17 0.19 0.21 0.23 0.25
Nominal size
Figures 3.31 and 3.32 show plots of the RP functions of three different bootstrap
ARSB ADF tests as a function of the nominal test size. The line labelled ARSB(lO)
96

is the RP function resulting from the usual ARSB ADF test conducted with 10 lags
in the original and bootstrap data ADF test regression and an AR(lO) sieve model.
The curve labelled ARSB(9) corresponds to the test conducted using an AR(lO)
sieve model, 10 lags in the original data's ADF regression and only 9 lags in the
bootstrap ADF regression. Finally, the curve labelled FDB ARSB(9) corresponds
to the modified fast double bootstrap described in the preceding paragraph with
k = 9 and p = 10. The figure is based on 2 000 Monte-Carlo replication of the
ARFIMA(O,d,l) DGP used earlier with () = -0.95 and -0.80 respectively. For each
repetition, 999 bootstrap samples were generated.
In both cases, the proposed MFDB ARSB test improves significantly upon the
ARSB and the modified version proposed in the previous section.
Figure 3.33. RP plot MFDB, ARFIMAA(O,d,l) model, n=200.
ITr======~-~~~-·~~~······"····""··~··"··
-MFD.B(9) 0.9 - -MFD.B(8)
- - 'MFDB(7) 0.8
0.7 MFDB(6)
-MFDB(IO) ------0.6
~ 0.5
004
0.3
0.1 •
.... -.... fIlf'I!""'~.""""
. -. -.' • w-
- _w _wW
w - -
o~~~~~--~~--~~--~~~~~~ 0.01 0.03 0,0:5 0,07 0.09 0,11 0.13 0.15 0.17 0.19 0.21 0.23 0.25
Nominal Size
97
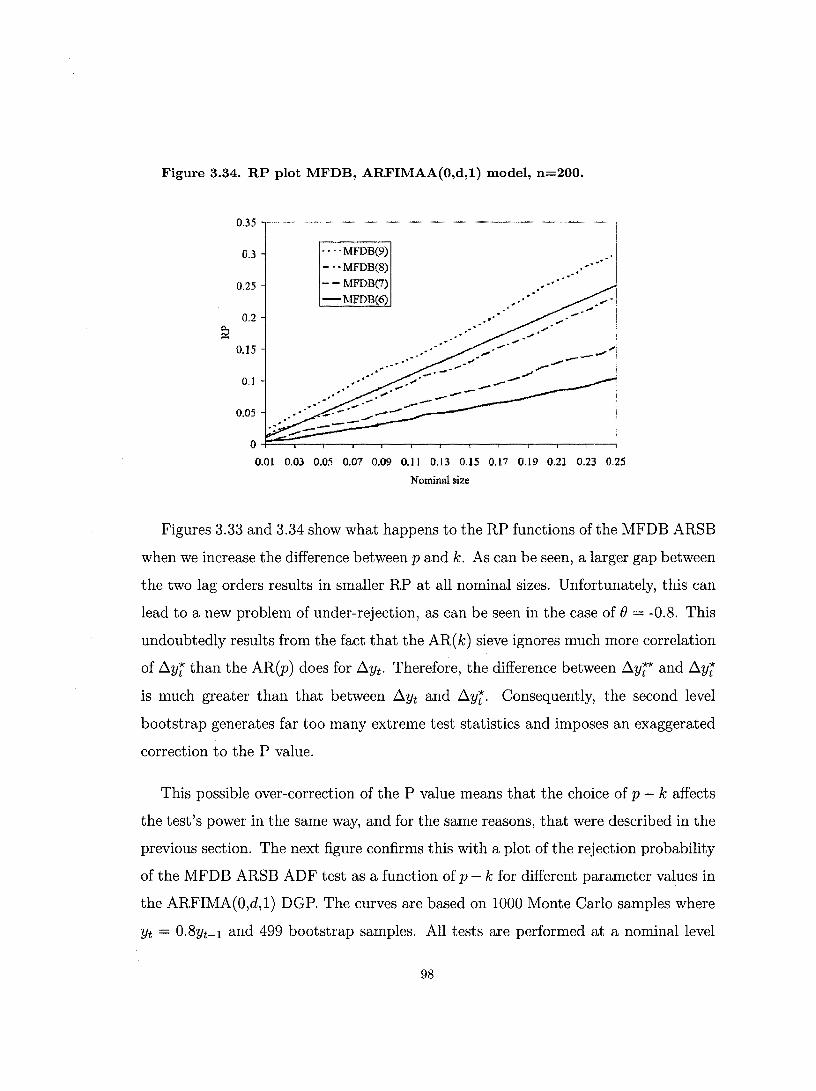
Figure 3.34. RP plot MFDB, ARFIMAA(O,d,l) model, n=200.
0.35
0.3
0.25
0.2
0.15 •
0.1
0.05
····MFDB(9)
-··MFDB(8)
-- MFDB(7) -MFDB(6)
" "
. ," "
_ ......... .' .
o~~~,-,--,---,--.~---.--.---~~~ 0.01 0,03 0.05 0.07 0.09 0,1 1 0,13 0.15 0.17 0.19 0.21 0.23 0.25
Nominal size
Figures 3.33 and 3.34 show what happens to the RP functions of the MFDB ARSB
when we increase the difference between p and k. As can be seen, a larger gap between
the two lag orders results in sm aller RP at all nominal sizes. Unfortunately, this can
lead to a new problem of under-rejection, as can be seen in the case of () = -0.8. This
undoubtedly results from the fact that the AR( k) sieve ignores much more correlation
of ~Y; than the AR(p) does for ~Yt. Therefore, the difference between ~Y;* and ~Y;
is much greater than that between ~Yt and ~Y;. Consequently, the second level
bootstrap generates far too many extreme test statistics and imposes an exaggerated
correction to the P value.
This possible over-correction of the P value means that the choice of p - k affects
the test's power in the same way, and for the same reasons, that were described in the
previous section. The next figure confirms this with a plot of the rejection probability
of the MFDB ARSB ADF test as a function of p - k for different parameter values in
the ARFIMA(O,d,l) DGP. The curves are based on 1000 Monte Carlo samples where
Yt = 0.8Yt-1 and 499 bootstrap samples. All tests are performed at a nominallevel
98

of 5%.
Figure 3.35. RP plot MFDB under alternative, ARFIMA(O,d,l) model, n=200.
0.9
0.8
0.7
0.6 \
g: 0.5 \ \'.
0.4 \,
\', 0.3 \" 0.2 \\., " . , 0.1 .... '.
- • -0,95 ••. -0,75
--0,55 -0,35 --0,15
O+----r---,----~ .... ~'~~~~--~----r_--~--~ 2 3 4 5 6 7 8 9
P·K
As expected, the power of the MFDB test decreases quickly as a function of p - k.
This drop is more severe for highly correlated models but they have superior power
when p - k = 1.
3.6 Conclusion
Analysis of the several Monte Carlo experiences undertaken in this chapter allows us
to draw sorne general conclusions on the finite samples performances of the ARSB,
MASB and ARMASB. Among the three procedures, the MASB appears to be the
most robust to the approximating or der choice and to the underlying DGP from
which the first difference pro cess is indigenous. This may be due, at least in part,
to the fact that the MA sieve is less likely to be led astray in the presence of a
near unit root cancelling MA root. This conjecture is supported by the fact that
99

the ARMASB is just as accurate as the MASB in such cases. Sorne results suggest
that the ARMASB may be able to outperform both the ARSB and the MASB while
requiring the estimation of a much smaller number of parameters if its approximating
order is chosen properly. This was shown to depend on the fact that higher or der
roots of the estimated ARMA polynomials tend to caneel out. It has however been
shown to lack robustness with respect to this choiee. In particular, our simulations
indicate that the Ale should not be used to choose the order of ARMASB but that
it may be useful to specify adequate ARSB and MASB, although this may result in
rather severe under-rejection in the latter case.
The ARSB has been shown to be disappointingly inaccurate and to offer negligible
refinements over the asymptotic test whenever a strong correlation structure exists.
Our simulations indicate that this is due to its incapacity to replicate the original test
regression's residual correlation structure. We have shown that better tests may be
obtained by using a shorter dynamic structure in the sieve bootstrap ADF regression
or by utilising a modified version of the fast double bootstrap. These ameliorations,
however, may come at the priee of a loss of power.
100

Chapter 4
Bias Correction and Bias
Reduction
4.1 introduction
In order to be of any use for inferences in finite sam pIe analysis of time series, a
bootstrap method must successfully replicate the correlation structure of the original
data. Consistency of the estimator used to build the bootstrap DGP is, of course,
a necessary condition for this. Consistent estimators can however be severely biased
in small samples. Examples of this are OLS or maximum likelihood estimators of
the parameter of AR(l) or MA(l) models with a root close to unity. Evidently, the
larger the estimation bias is, the larger the discrepancy between the original data
and the bootstrap samples will be. As a consequence, we may expect the accuracy
of the bootstrap tests to be inversely related to the estimation bias. In this chapter,
we investigate the link between estimation bias and bootstrap unit root ADF tests
accuracy. Davidson and MacKinnon (2006b) also use bias correction in the context
of bootstrap inference in models estimated by instrumental variables.
101

The first part of this chapter reviews sorne widely used bias correction methods
for time series processes based on the bootstrap. Then, we propose a new bias re
duction method based on the analytical form of the GLS transformation matrix. An
interesting feature of this GLS bias reduction is that it can be used in combination
with any bootstrap bias correction method to yield further bias reduction at very low
additional computing cost. As any other GLS method, it can be iterated.
To provide an example of how bias corrected or bias reduced bootstrap DGPs
may improve inference quality, we investigate whether the bias has any significant
effect on the accuracy of bootstrap unit root tests. We begin by considering cases
where the correlation structure of the data is of a finite and known or der . This case
is of particular importance since it has been shown that, under such circumstances,
bootstrapping commonly used unit root tests provides asymptotic refinements (Park,
2003). This me ans that we have theoretical reasons to expect bootstrap tests to be
more accurate under the null in finite samples than tests based on asymptotic critical
values. Park (2003) and Nankervis and Savin (1996) provide simulation evidence to
that effect. However, as we will discuss below, they restrict themselves to simple
AR(l) models with parameters that are easily estimated with very little bias. We
consider a wider family of models with harder to estimate correlation structures and
show, using simulations, the gains realized by basing the bootstrap on bias corrected
or bias reduced estimators.
We also con si der cases where the data cornes from a generallinear process. In this
latter case, we consider bias as being the expected distance between the pseudo-true
DGP of the data and the estimated model. We find that bootstrap bias correction
yields bootstrap DGPs doser to the pseudo-true DGP while our GLS bias reduction
experiences sorne difficulties.
This chapter is organised as follows. In section 2, we introduce sorne bias correction
102

methods for models of the ARMA family. Those we consider here are aIl based on the
bootstrap. We introduce the GLS bias reduction in section 3 and present the results
of several simulations that compare it to already existing techniques. We discuss the
effects of biased estimation on bootstrap tests when the data are generated by a DGP
with a finite correlation structure in section 4. We also provide several simulation
results indicating that bias correction and bias reduction of the bootstrap DGP is
profitable. The effect of bias correction and bias reduction on sieve bootstrap tests is
studied in section 5. Section 6 concludes.
4.2 Bootstrap Bias Correction Methods
We consider a vector of parameters 8 in a regression model. The analysis of the
present section is restricted to models belonging to the stationary and invertible
family of ARMA models but could easily be extended to other models, even statistical
models that do not take the form of regression models such as probits and logits. See
MacKinnon and Smith (1998), henceforth MS(1998) for a fuller treatment. We follow
these authors and let ê be an estimator of 8 and we write:
ê = 80 + b(80 , n) + v(80 , n) ( 4.1)
where v(80 , n) is a mean 0 random disturbance and b(80 , n) is the bias function and
is defined as b(80 , n) =E(ê) - 80' This formulation makes it clear that the bias of ê is
a function of the sample size, n, and of the true parameter value, 80, and that fixing
one of these arguments allows one to plot the bias as a function of the other. Of
course, for an estimator to be useful at aIl, it is necessary that its bias be a decreasing
function of n, and we therefore expect the bias function of any consistent estimator
to exhibit this characteristic for any value of 80. On the other hand, the form of
b(80 , n) as a function of 80 can be just about anything, although sorne patterns tend
to repeat themselves in certain classes of models. This feature makes bias correction a
103

difficult task because, depending on whether b(Bo, n) is a constant, linear or non-linear
function of Bo, different bias correction methods should be used.
We have mentioned in the introduction that the bootstrap may be used to correct
the bias of a given estimator. This essentially means that it can be used to estimate
the bias function. In or der to do this, and for a given sam pIe size, it is necessary to
provide the bootstrap algorithm with a value of B. If it was known, then Bo would
be the obvious choice. Since this is not the case, we must find another value of (J. It
turns out that this choice is of critical importance in most cases of interest. In fact,
the importance of this choice depends on the shape of b((Jo, n) as a function of (Jo.
If b( Bo, n) is a constant function throughout the parameter space, then the choice
of (J at which we evaluate the bias function is irrelevant. Indeed, the fact that b((Jo, n)
is constant implies that we expect ê to be biased in the same proportion whatever
(Jo really is. The simplest bootstrap bias correction method then results in what
MacKinnon and Smith (1998) caU the constant bias correcting (CBC) estimator.
This simply consists of generating a large number (say, B) of bootstrap samples of
size n from the model being studied and obtain an estimate of (J for each of them.
This can be done using any values of (J but it is usual to use ê. If we denote the
estimate of B obtained from the yth bootstrap sample as êj , then the bias can be
estimated as:
b(n) = [(lIB) t. ê;]- ê where we have removed Bo from the bias expression to make explicit the fact that
it does not depend on the true parameter value. The CBC estimator is therefore
sim ply B = ê - b( n). The CBC estimator is very commonly used in practice, no doubt
because of its computational ease. It is however not often the best choice, for it is
quite rare that an estimator has a constant bias function.
If b(Bo, n) is not a constant function in (Jo, it can either be linear or non-linear.
104

Both cases are investigated by MS(199g). If the bias function is linear, then it can
be written as follows:
b(Bo, n) = a + {3Bo (4.2)
Thus, if one knows the values of a and {3, then one can evaluate the bias for any
value of Bo. In practice, these parameters are almost always unknown and must be
estimated. Fortunately, this is a rather easy task which sim ply requires that we
evaluate the function (4.2) at any two points. This yields what MS (199g) call the
linear bias correcting estimator (LBC):
where Πand ~ are the evaluated values of a and {3.
Estimating a non-linear bias function is not that simple because it generally re
quires the use of numerical techniques. MS (199g) propose a simple iterative method
to obtain what they call a non-linear bias correcting estimator (NBC) and Smith and
al. (1997) and Gouriéroux et al. (1997) use similar techniques in practical applica
tions.
It is appropriate here to mention that an LBC estimator can sometimes be used to
correct the bias of an estimator even when the bias function is non-linear. Indeed, as
is the case with just about any continuous and differentiable function, it is possible to
approximate the non-linear bias function with a linear function. Evidently, the closest
to being linear b(Bo, n) is, the better the quality of the approximation. AIso, if we use
ê in the computation of the LBC, then it follows that () is an adequate bias corrected
estimate even if b(Bo, n) is non-linear. Indeed, as n increases, ê becomes less biased
so that the linear approximation is based on a point close to Bo and is therefore more
precise. In fact, MS (199g) use Taylor expansions to show that the LBC and NBC
estimators are equivalent to order Op(n-1). Accordingly, their simulations indicate
that the LBC and NBC estimators are roughly equivalent in finite samples in AR(l)
105

and logit models.
The above bootstrap bias correction methods can be applied to a wide variety of
models. We shall concentrate our attention to time series models of the ARMA(p,q)
class. Sorne bias correction methods are particularly well suited for this kind of
models. In particular, a host of such methods have been proposed for the AR(l)
case, see for example, Andrews (1993) and Kendall (1954). We will not discuss these
in detail. In the next section, we propose to use the G LS transformation matrix to
estimate the bias of sorne ARMA class models.
4.3 The GLS bias reduction
We now show that it is possible to estimate the bias of any biased estimator in AR(p),
MA(q) and ARMA(p,q) models using an analytical form of the GLS transformation
matrix. We then use this bias estimator to define a bias reduced estimator of the
model's parameters. Let u be a n-vector of observations generated by a stationary
and invertible ARMA(p,q) process, that is, Ut = I::f=l aiUt-i + I::{=1 BiEt-i + Et, where
Et is an i.i.d. innovation with mean 0 and variance a;. Further, let :E denote the
covariance matrix of the vector u. Then, the GLS transformation matrix 'l!, which
is a function of the parameters ai and Bi, is defined as a n x n matrix such that
'l!'l! T = :E-1 . It is easy to check that the result obtained by evaluating 'l! T at the
true parameter values and premultiplying it to the vector u yields a vector whose
tth element simply is Et. When the true parameter values are not known, 'l! can be
evaluated using a set of parameter estimates. In this chapter, we investigate what
happens when one uses a biased estimator.
As we discussed in the last chapter, there are several ways to build 'l!. In all that
follows, we use the estimator of Galbraith and Zinde-Walsh (1992). In this paper,
106

the authors show that the transformation matrix 1J! can be constructed recursively,
that is, the tth row of 1J! T may be defined as a function of the t - 1 first rows. In
particular, for any stationary and invertible ARMA(p,q) process, they show that the
element in position i, j of the lower triangular matrix 1J! T is
ifi<j
{
0,
hi,j = 1, if i = j ",min{i-l,q} e h h .
- L...-k=l k i-k,j - Œi-j, ot erWlse.
where ej and Œj denote the lh MA and AR coefficient respectively. In practice,
one replaces these unknown parameter by estimates obtained using sorne consistent
method such as OLS or MLE.
The use of a GLS transformation matrix to estimate parameter biases is a novelty.
The closest thing to it in the existing literature is Koreisha and Pukkila (1990) 's use
of GLS to estimate the parameters of an ARMA(p,q) model with more precision. Al
though linear, an ARMA(p,q) process is somewhat difficult to estimate because it is
a function of lags of the unobserved error term. Koreisha and Pukkila (1990) propose
to replace this unobserved error by sorne proxy, namely, the residuals obtained from
fitting a long autoregression to the data. Then, it is possible to obtain consistent
estimates of the parameters of the ARMA(p,q) model by simply regressing the de
pendent variable on its first p lags and on the contemporaneous residual from the long
autoregression and its first q lags. To fix ideas, con si der the following ARMA(I,l)
model:
and let it denote the tth residual obtained from fitting a long autoregression to Yt.
Then, replacing Et and Et-l by these residuals, we obtain
where et is an error term that appears because of the difference between Ej and i j . Ob
viously, the parameters of this last equation may be estimated by regressing (Yt - it)
107
on Yt-l and Êt - 1 . This is however not appropriate since, under weak conditions, the
authors show that the new error term et is an MA(l) pro cess (or, in the general case,
an MA( q)). It is therefore preferable to use feasible G LS to obtain more efficient
estimates.
The simulations reported by Koreisha and Pukkila (1990) indicate that this method
yields fairly precise parameter estimates. However, the authors do not consider the
issues of bias correction and bias reduction and their method does not allow them
to derive equations for the bias terms. AIso, their procedure does not exploit the
structure of an exact GLS transformation matrix estimator.
4.3.1 GLS bias reduction for MA(q) models
Consider n observations of an invertible MA(q) pro cess:
where the CtS are LLd. innovations with 0 mean and finite variance. Let (j be a
consistent estimator of the q-vector of true parameters BO. Let BJ denote the true
value of the lh parameter in the model and assume that Ô is biased in small samples:
E( Ôj ) = BJ + bj , where we have dropped the explicit dependence of bj on n and BO
for notational convenience. Let v = 'li (E( ê)) T U denote the n xl vector of residuals
obtained when 'li is evaluated at the expected value of B.
108

Observation 4.1.
Under standard regularity conditions and assuming that co = C-l = ... = C-q+l = 0,
which is harmless asymptotically,
where L is the lag operator, <I> is an infinite order lag polynomial function of eo, the
vector of true parameters of the MA pro cess and b, the vector of bias terms. More
precisely,
where
Proof.
00
lit = L 1'i llt-i + Ct i=l
min{i,q} 1'i = L -1'i-ke~ - bi, 1'0 = 0
k=l
Evaluating 'li at E( ê) gives:
1 o o 0
-e~ - b1 1 0
(e~ + bd2 - eg - b2 -e~ - b1 1
o o
or, algebraically, the element in position hi,j is determined by the equation:
{
0, if i < j
hi,j = 1, if i = j
- L::~~{i-l,q}(eg + bk)hi-k,j, otherwise.
(4.3)
(4.4)
Then, we have the following equations, where we have suppressed the 0 superscript
for ease of notation:
109
(4.5)
(4.6)
(4.7)

1/4 = (Blb2+B2bl +2blb2-bf-2Blbî-Bîbl-b3)cl +(bî+Blbl-b2)c2-blc3+c4 (4.8)
1/5 = (Btbi +3BIbf+3Bibî+bi-Bib2-2BIB2bl-4BIbIb2-2B2bî-3bîb2+BIb3+B3bI (4.9)
+2bIb3 + B2b2 + b~ - b4)cl + (-Bibl - 2Blbî - bf + Blb2 + B2bl + 2blb2 - b3) C2
+ (bî + BIbl - b2) C3 - blc4 + C5
If we solve equations (4.5), (4.6), (4.7) and (4.8) for Cl, c2, C3 and C4 and substitute
them in equation (4.9), we obtain:
1/5 = -bl1/4 + (BIbl - b2) 1/3 + (-Bibl + Blb2 + B2bl - b3) 1/2
+ (Btbi - Bib2 - 2BlB2bl + BIb3 + B3bl + B2b2) 1/1 + c5
(4.10)
which indeed has the expected form. Obviously, generalizing this expression by further
substitutions yields the stated result. •
The bias equations (4.4) are generalisations of the equations used by Galbraith
and Zinde-Walsh (1994) to develop their analytical indirect inferenee estimator of
MA parameters through the fitting of a long autoregression to the data. This can
be seen by placing an original estimate such that E(Ôi ) = 0 for aIl i in the GLS
transformation matrix so that bi = -B? for aIl i. Renee, using these equations to
estimate the bias terms can be considered as applying GZW (1994)'s method to the
residuals obtained from a first stage biased estimator. If this first stage estimator
is itself obtained by analytical indirect inferenee, then estimating its bias through
equations (4.4) could be considered as sorne sort of iteration of the method. Rowever,
any estimator at aIl can be used as an initial value of B, even an inconsistent one, as
long as it converges to a non-stochastic limit within the invertibility region. This last
restriction is neeessary because 'li is only valid for invertible proeesses.
There are several possible ways one could use equations (4.4) to obtain bias redueed
estimators. In the case of MA models, we propose to estimate the bias of each
110

parameter one at a time and to define the bias reduced estimator in the following
recursive way:
1. Use the initial estimator to obtain a vector of filtered data: ÎJ = W (19) T u. Be
cause of the properties of e, this vector is expected to have the correlation structure
identified in observation 4.1.
2. Fit a long autoregression to ÎJt . Then, estimate the bias of el as b1 -'YI and
compute the bias reduced estimator, which we define as 0 1 191 - b1.
3. Estimate b2 as b2 = -'YI - 'Y201. It is preferable to use the bias reduced estimate
of el instead of 191 because it is likely to be closer to e~ than the original estimate, so
that the estimate of b2 should be more precise. Compute the bias reduced estimator
of e2 , which we define as O2 - ê2 - b2 .
4. Use steps similar to 2 to get bias reduced estimates of any other parameter. That
is, compute the bias reduced estimators Oj - êj - bj where bj = -'Yi - L:j~~{i,q} 'Yi-jOj
for j = 3, ... ,q.
This bias reduction scheme can be iterated by using 0 in the G LS transformation
matrix so as to obtain a new vector of filtered data f) = W (0) T U and going through
steps 2 to 4 with the new filtered data. We explore this possibility in the simulations
below.
4.3.2 GLS bias reduction for AR(p) models
Now, consider n observations of a stationary autoregression:
Ut = alUt-l + ... + apUt_p + Ct
and let â be a biased estimator of the true parameter vector aD with typical element
a? Then, let E( âi ) = a? + bi . Finally, let 1/ = W T (E( â)) u be the vector of filtered
111

observations at the expected value of &.
Observation 4.2.
Under the same conditions as in observation 4.1 plus that Ut-j = 0 for all 0 < j ::; p.,
where 8 is an infinite or der lag polynomial function of oP, the vector of true para
met ers of the AR pro cess and b, the vector of bias terms and L is the lag operator.
More precisely,
where
Proof.
00
Vt = L 'YiVt-i + ét i=l
min(j,p)
'Yj = L (a? + bi))'j-i - bj , 'Yo = 0 i=l
Evaluating 'li at E( &) yields:
1 0 0
-a~ - bl 1 0
'li T (E(&)) = -ag - b2 -a~ - bl 1
-a~ - b3 -ag - b2 -a~ - bl
Then, we get the following equations:
V3 = -(b2 + blal)él - blé2 + é3
0
0
0
1
V4 = -(b3 + b2a l + blaî + bl ( 2)él - (b2 + bl a l)é2 - blé3 + é4·
112
(4.11)
(4.12)
( 4.13)
(4.14)
( 4.15)
( 4.16)

Estimating a moving average model to reduce the bias of an AR(p) model may seem
cumbersome and we may wish to avoid this. Substituting (4.13), (4.14) and (4.15) in
(4.16), we obtain:
It is easy to see that the coefficients of this autoregression have the form given in
equations (4.12) .•
Based on the results of observation 4.2, two bias reduction methods can be pro
posed. In both cases, we first need to compute v = W(&)T u. Then, we can estimate
the bias terms by fitting either a long MA(k) or a long AR(k) to Vt and following
steps similar to those described in observation 4.1. The bias reduced estimator is then
defined as éii = &i - hi, where hi is the bias estimate. Of course, this can be iterated.
We consider only the long autoregression approach in the simulations below.
4.3.3 GLS bias reduction for ARMA(p,q) models
It is easy to extend the results of observations 4.1 and 4.2 to find a similar result for
ARMA(p,q) models. Let us consider the following process:
which we assume to be invertible and stationary. Let e and & be biased estimators
defined as above. Then, it can be shown that the process v = 'liT (E( iJ), E( &) ) u has
an infinite autoregressive form with parameters functions of the true parameters and
of the bias terms. Unfortunately, these functions are not simple and they involve
products and squares of the bias terms and the true parameter values. For example,
in the case of an ARMA(l,l), the first coefficient of this infinite AR process is equal
to -(ba + bo), that is, minus the sum of the bias terms of the AR and MA parameters.
113

The second coefficient is much more complicated: -(aba - ()be + beba + b;J This yields
the following expressions for the biases:
ba
= [ "/2 - ()"/l ] "/1 - () - a
be = - [ "/2 - ()"/l ]_ "/1 "/1 - () - a
where "/1 and "/2 are the parameters of the infinite autoregression. Of course, we
would replace "/1, "/2, e and a by consistent estimates. Since the bias terms are
here functions of the ratio of several parameters which must be estimated, we should
expect the bias estimates to have a high degree of variability. The resulting bias
reduced estimators are nevertheless consistent, as we will now show, although their
finite sample properties may be unattractive.
4.3.4 Properties of the bias reduced estimator
In this section, we discuss the properties ofthe GLS bias reduced estimator for MA(q)
models. It is very easy to extend this discussion to the bias reduced estimators for the
AR(p) and ARMA(p,q) models. Let us define the vector of bias reduced estimators
for the parameters of a MA(q) model as e _ Ô - b, where e has typical element Ôi - bi .
We will now show that e is a biased but consistent estimator of e. We make the
following assumptions:
Assumptions 4.1
Ut is an invertible MA(q) pro cess satisfying assumptions 2.1. Further, the or der of
the approximating autoregression used to estimate the bias increases with the sample
size at the rate o(nl / 3 ).
Let us consider the expectation of e:
E(e) = E(Ô) - E(b)
114

Thus, for e to be unbiased, it is necessary that b be an unbiased estimator of b. This
is evidently not the case because, in the GLS bias reduction method, each element of
b appears as part of the coefficients in an infinite autoregression. Thus, b has to be
estimated from a finite or der approximation of this infinite order model. Hence, the
regression model from which the elements of b are estimated is always underspecified
and b consequently suffers from omitted variable bias. In fact, even if it were somehow
possible to estimate the true AR( (0) regression (4.3), b would still be biased because
the regressors in (4.3) are obviously not exogenous. A similar argument can be made
for the AR(p) and ARMA(p,q) cases.
Suppose now that ê is a consistent estimator of (J. One such estimator for MA(q)
models is the simple estimator of GZW. Then, it is possible to show that our GLS
bias reduced estimator is consistent. Indeed, we have:
plim e = plim ê - plim b
= (Jo - plim b.
Consistency therefore follows if plim b = O. This follows naturally by showing that
the results of Berk (1974) can be applied to the approximating autoregression (4.3).
Indeed, Berk shows that OLS estimators of the parameters of an AR(k) approximation
of an AR( (0) model are consistent, provided that we let k increase at a proper rate
of the sample size. The proof, which we present in the appendix, is quite simple,
but we take the trouble of going through it because Berk (1974) considers infinite
autoregressions with fixed coefficients, whereas the coefficients of regression (4.3) go
to zero as n -+ 00 and are therefore not fixed as the sample size increases. Indeed,
if we once more take the analytical indirect inference estimator of GZW (1994) as
an example, then b can be shown to go to 0 as the order of the approximating
autoregression used to estimate e increases as a function of n. For example, GZW
115

(1994) show that the asymptotic bias of the estimator of the sole parameter of an
MA(I) model is of or der O(B2k+1), where B is the true parameter value. Whenever
B E (-1,1), this means that the asymptotic bias goes to 0 as k and n go to infinity
because k is a function of n. Thus, the result of Berk (1974) implies that plim b =
O. This result can easily be extended to model (4.11) as weIl as to the bias corrected
ARMA(p,q) parameter estimates. Renee, we conclude that the GLS bias redueed
estimator is consistent.
The asymptotic distribution of e is not as easy to characterise. It is shown in
Berk (1974) and in Galbraith and Zinde-Walsh (2001) that the OLS estimator of
the parameters of an AR( (0) model based on an AR( k) regression has a limiting
normal distribution as n -+ 00 under assumptions 4.1. Thus, the OLS estimator
of the parameters "'Ii in (4.3) has this property. This implies that the estimator of
the first bias term, namely bl , is asymptotically normal. In turn, this means that
BI is asymptotically normal because it is the sum of two independent asymptotically
normal random variables.
For bi , i = 2,3, ... we need to a bit more careful. Consider, as an example, b2 =
e1bl - 12. Using a first or der Taylor series expansion, we have:
Thus,
Rence, if the joint asymptotic distribution of n 1/2 (el - BI)' n 1/2 (b l - bl ) and n 1/2 (12 - "'12) A _
is multivariate normal, then b2 is asymptotically normal, and so is B2 . Similar argu-
ments can be made for Bi with i > 2.
116

4.4 Simulations
4.4.1 MA models
Figure 4.1 shows the bias function of the GZW (1994) analytical indirect inference es
timator of the parameter of an MA(I) pro cess with N(O,I) errors. Although it might
have been possible to find its analytical expression, we have generated this function
using simulations. There are only negligible differences between this and the bias of
the ML estimator. l t also shows the bias function as estimated by several bias correc
tion or bias reduction methods. AH these functions were evaluated using simulations.
Throughout the present section, CBC denotes the constant bootstrap bias correction
estimator, GLS denotes the GLS bias reduction estimator, GLSIT is the GLS bias re
duction iterated once, CBCGLS denotes the estimator obtained by applying the GLS
bias reduction to the CBC estimator and G LSCBC denotes the estimator obtained
by applying the CBC to the G LS bias reduced estimator. It may seem inappropriate
to apply a bias reduction method to an unbiased estimator as we do when we use the
GLS bias reduction on the CBC estimator. However, if one replaces W(E(Ô)) by w(Ô)
in observation 4.1, then what results is a set of equations that may be used to estimate
the estimation error of Ô. Thus, applying the GLS method to an unbiased estimator
may also be considered as estimation error reduction as weH as bias reduction. For
every estimator not requiring any bootstrapping (that is, for the GZW estimator,
GLS and GLSIT), we have used 55 values of () spread across the invertibility region.
Those values were -0.99, -0.97, ... -0.91, -0.9, -0.89, -0.87, ... , -0.8, -0.75, ... , 0.8, 0.81,
0.83, ... , 0.89, 0.9, 0.91, 0.93, ... , 0.99. For the bootstrapped estimators, we have
used 13 values: -0.99, -0.9, -0.8, -0.6, ... , 0.8, 0.9, 0.99. The simulations are based
on 5000 replications of samples of 25 observations. AlI bootstrap bias corrections are
based on 500 bootstrap samples. Since the GLS bias correction is only valid for invert
ible pro cesses, we have imposed the restriction that IÔI <0.9999 on aH the estimators.
117

Figure 4.1. Bias function, MA(l) model, n=25.
0.3
-Thetahat • CBC
0.2 - -OLS • CBCGLS
• OLSCBC'" GLSIT 0.1
•
-0.2
-0.3
Them
Figure 4.1 shows that the initial estimator, ê, is biased towards 0 throughout
the parameter space, but most severely so for large absolute values of (). It can be
seen that the CBC, GLS, CBCGLS and GLSIT an pro duce similar bias function
estimates. They are aIl quite accurate for 1 () 1 <0.6 but severely under-estimate the
bias for higher values. The GLSCBC on the other hand is markedly more accurate
over the range of 1 () 1>0.6 but tends to over correct for other values, though not
too severely. This undoubtedly results from the fact that the CBC method is not a
function of the degree of unmodelled correlation le ft over in the residuals and that it
is therefore incapable of realising that the GLS reduction has effectively removed an
bias. Iterating the GLS reduction once seems to allow for a slight additional decrease
of the bias over the who le parameter space.
While it is certainly interesting to look at the magnitude of the bias of an estimator
118

in small samples, a more meaningful measure of its accuracy is the mean square
error (MSE). Indeed, one may in practice, when given the choice between two biased
estimators, prefer to use the more biased one if it has lower variance. As a combined
measure of bias and variance, the MSE therefore constitutes an excellent criterion by
which to judge biased estimators.
Figure 4.2. MSE function, MA(l) model, n=25.
0.11
0,1
0.09
II'! 0.07 Vl
:::E 0.06
0.05
0.04
0.03
•
-Thetahat • CBC
- - OLS • CBCOLS
• OLSCBC - - 'OLsrr
•
• 1
,d • ,.- 1
".- .1 .. 1
1
0.02 +r-rrrTT1-rrrrr..-rrr..,.,.-,...,...rrr.,-,-,rrr,.,.-,..,...,-,..."..,-,-,rrr.."-,...,-,...,,,...,....,.,.-I
~~$~~~~a,~~Ç)~~~~~~.~~ >-, ;>0> 7"' ;-.' 7"' ';>0> 7"' a· a· Ç)' a· a· a· Ç)' Theta
Figure 4.2 shows the MSE function of all the estimators described above. The first
thing worth noting is that all the bias corrected or reduced estimators have higher
MSE than Ô for 1 f) 1 <0.65. This is not surprising at all, for it is a well known fact
that bias correction methods often increase the variance of the estimators (see MS
(1998)) and figure 4.1 has shown that Ô is quite accurate in this range. Note that
increasing the number of bootstrap samples for CBC, CBCGLS and GLSCBC might
decrease their MSE further, but certainly not enough to significantly influence the
results displayed in the figure.
On the other hand, we have also se en that Ô is severely biased for parameter
values 1 f) 1 >0.6 and that aIl the bias correction or reduction techniques reduced this
119

bias, with different degrees of success. Accordingly, figure 4.2 shows that aH the bias
corrected and bias redueed estimators have lower MSE than ê over that range of
DGPs. For extreme DGPs (1 () 1~0.9), the GLSCBC has the lowest MSE, which is in
accordance with the features of figure 4.1. AIso, for 1 () 1~0.65, the iterated GLS bias
redueed estimator has significantly lower MSE than the simple GLS one. Sinee we
have se en that there was only a marginal bias differenee between G LS and G LSIT, we
must conclude that the latter has lower variability than the former. Almost identical
features are observed in larger samples of 100 observations, as shown in figures 4.3
and 4.4.
Figure 4.3. Bias function, MA(l) model, n=lOO.
0.15
0.1 -Thetalmt • CBC
- -OLS • CBCOLS • OLSCBC'" GLSIT
0.05
• o~~~~~~~~~~~~~~~·~~
'):>~ '):>~ '):>f' '):><P '):>,:-'" '):>? '):>'r'" '):>'> '):>"':-?
-0,05
-0.1
·0.15
Tbeta
120

Figure 4.4. MSE function, MA(l) model, n=lOO.
-Thetahat - -GLS
• GLSCBC
0.01
+ CBC
• CBCGLS - - 'OLsrr
When one is using analytical indirect inferenee, it is possible to use the GLS
results presented above to devise a simpler way of obtaining estimates of the bias.
The key to this is to realise that the residuals of the long AR(.e) model that we fit
to the data in order to get the G ZW estimator can be shown to converge to the
errors of the true model (see, for example, lemma Al of the present thesis). It is
therefore natural to expect that, for any given or der .e that yields a vector of biased
parameters (J, the residuals of the AR(.e) would behave in a manner similar to that
of the true proeess filtered using (J. It may therefore be possible to estimate the
bias using these residuals. This has the obvious advantage of not requiring us to
use the GLS transformation matrix at aIl, which makes the bias reduction even less
computationaIly intensive. On the other hand, sinee the residuals of the long AR
model will behave only approximately like the G LS filtered data, this simple method
should not be expected to perform as weIl as the one outlined above.
121

Figure 4.5. Bias function, MA(1) model, n=100.
0.1
0.08 -Thetahat
0.06 - -OLS ••• OLS SIMPLE
0.04
0.02
~ -' m . -0.55 -0.35 -0.15 0.05 0.25 0.45 0.65
-0.04
-0.06
-0.08
-0.1
Theta
Figure 4.6. MSE function, MA(1) model, n=100.
0.Q18
-Thetalmt 0.016 - -OLS
- - . OLS SIMPLE
0.014
w " ,. .... ~ ...... ". __ ... "'" .. - "'" ... ' /1; '" ,*, ... "
CI "\.., -- • ".II "" " - .. _ ..... - ..
~ 0.012
0.008
0.006 +-r..-r--,-,....,-,-,r-r-r-r...-r...-r..-r-r-r-,-,-,r-r-r-r...-r-r-rT'T-r-r-,-,rrl
-0.95 -0.15 -0.55 -0.35 -0.15 0.05 0.25 0,45 0,65 0.85
Theta
Figures 4.5 and 4.6 compare the bias estimated and MSE of the estimators obtained
by the GLS and simplified GLS methods for an MA(l) model with N(O,l) innovations.
These simulations confirm that the simplified bias reduced estimator is much less
122
accurate than the original one. Because constructing the G LS transformation matrix
is easy for any univariate model, the simplified bias reduction should probably never
be used. It can however be useful in multivariate cases, as we shaH see below.
AH the bias correction or reduction methods above can be used for higher order
processes. As an example, we consider the case of a MA(2) pro cess and look at its
bias function for different parameter values. The DGP is Ut = e1Ct-1 + e2Ct-2 + Ct,
where Ct is an NID(O,l) random variable. For our simulations, we have fixed 612=-0.2
and we have considered 611=-0.8, -0.7, ... , 0, for a total of 9 different DGPs. The
simulations used 2000 Monte Carlo samples of 100 observations and 500 bootstrap
repetitions. Figures 4.7 and 4.8 show the bias function of the original estimates of el and 612 , which were obtained using the method of GZW (1994), and compares it to
the bias estimated by several methods.
The CBC, GLS and iterated GLS methods aH provide adequate, though not per
fect, bias estimation for both parameters. Applying the CBC to the GLS reduced
estimator is not at aH desirable for most of the parameter space as it over-corrects
significantly in most cases.
Figures 4.9 and 4.10 show the estimates' MSEs. It is most interesting to see that
the two GLS based methods actuaHy decrease the MSE of the estimate of el when
there is a root close to the unit circle, without increasing it too much in other cases.
AIso, they only slightly increase the MSE of the estimates of 612 , The CBC estimator
of 612 has a much higher MSE than the original estimator or either of the two G LS
based ones.
123

Figure 4.7. Bias function of (Ji' MA(2) model, n=100.
0.14
0.12 -Thetahat ••. CBC
- - OLS -e-OLSCBC
0.1 -èr-GLSrr
0.08
gj 0.06 i:Q
0.04 .
0.02
0
-0.8 -0.7 -0.6 -0.5 -0.4 -0.3 -0.2 -0.1 0 -0.02
Them 1
Figure 4.8. Bias function of (J2' MA(2) model, n=100.
fi>
0.05
0.045
0.04
0.035
0.03
~ 0.025
0.02
0.015
0.01
0.005
-Thetahat - - • CBC - - GLS -e-GLSCBC -èr-GLSIT
O+----r--·-·-.---,----.·----·,----r----T·----.--·~
-0.8 -0.7 -0.6 -0.5 -0.4 -0.3 -0.2 -0.1 0 Theta 2
124

Figure 4.9. MSE of ()t, MA(2) model, n=100.
0.03
-Thetahat - - - CBC 0.025 - -OLS -@-GLSCBC
-tf-OLSIT
0.02
0.015 •
0.01
0.005 +----,---,..-----,----.-----,,-----,--.,-----,----1
-0.8 -0.7 -0.6 -0.5 -0.4 -0.3 -0.2 -0.1
Thetal
Figure 4.10. MSE of ()2' MA(2) model, n=100.
ILl
0.025
0.023
0.021
0.019
0.011
!il 0.015
0.013
0.011
0.009
0.007
-ThetaJmt ••• CBC - -GLS -@-GLSCBC -tf-GL,-,--S,-,--IT __
o
0.005 +----,---.,----,--,------.-----r--,..--....,---1
-0.8 -0.7 -0.6 -0.5 -0.4 -0.3 -0.2 -0.1 0
Theta2
125

4.4.2 AR models
In this subsection, we briefly study the properties of different bias corrected or re
duced estimators for AR(l) models. The results below were obtained by simulations
which were conducted in exactly the same manner as those realised for the MA mod
els considered ab ove. Figure 4.11 shows the bias function of the sole parameter of an
AR(l) model, when estimated by OLS, and compares it to the bias function that is
estimated using four of the methods considered in the preceding subsection. Since
the GLS bias correction requires stationarity, we have imposed it on an parameter
estimates. The figure is based on 5000 Monte Carlo samples of size 25 and an boot
strap corrections were computed using B=500. The parameter space is exactly the
same as in the MA(l) case.
Figure 4.11. Bias function, AR(l) model, n=25.
0.25
• -OLS • CBC Q.2 - -OLS • GLSCBC • • • • 'OLSIT
(1.15
• • 0.1
.~ Q:l
0,05
" • •
Alpha
126

Figure 4.12. MSE function, AR(l) model, n=25.
0.12
0.1
l'tl 0.08
~ 0.06
0.04
0.02
Alpha
The CBC is able to estimate the bias very accurately throughout the parameter
function. This is in accordance with the results of MS (1998). On the other hand,
every bias reduction involving the GLS method turns out to be extremely imprecise,
even mistaking the sign of the bias several times. Further simulations show that this
inaccuracy disappears as the sample size increases but that the CBC always remains
more accurate. AIso, things get a little bit better when we release the stationarity
restriction. This may be due to the fact that a? - bi instead of simply a? enters the
equation of the ith bias term.
4.4.3 ARMA models
This subsection investigates the properties of our GLS bias reduction method and
compaires them to those of the CBC for ARMA(p,q) models. For simplicity, we li mit
ourselves to the ARMA(1,l) case. The figures below are based on 5000 Monte Carlo
samples of 100 observations of a simple ARMA(l,l) pro cess driven by NID(O,l) errors
127

with an AR parameter fixed at 0.8 and an MA parameter taking different values
between -0.4 and 0.8. The parameters were estimated using the method of GZW
(1997) with an approximating AR(10) regression model. We also used an AR(10)
model to obtain the GLS bias reduced estimates while the CBC was carried out using
500 bootstrap samples.
The GLS and CBC methods provide adequate bias estimates in most of the cases
considered above. The largest biases occur when there is partial cancellation of the
roots of the AR and MA parts (for example, the case where 0=-0.4 while 0;=0.8).
In this case, the GLS reduction is significantly more accurate than the CBC. The
iterated GLS on the other hand becomes extremely bad. It is however difficult to
draw serious conclusions based on these two figures because they are based on a very
limited set of DGPs.
Figure 4.13. Bias function, MA parameter, ARMA(1,1) model, n=100.
0.3
0.25
0.2
0.15
J 0.1
0.05 -
0
-0.05
-0.1
-0.4
128
r-OZW
- -OLS - - 'CBe 1
- -OLSlT

Figure 4.14. Bias function, AR parameter, ARMA(1,1) model, n=100.
0.1
0.05 " " 0
0.8 " 0.8
-0.05
.~ -0.1 al
-0.15 -ozw - - 'CBC
- -OLS - -OLSIT -0.2
-0.25
-0.3
Alpha
4.4.4 Extension to VMA models
The idea of analytical indirect inference has been extended to multivariate vector mov
ing average (VMA) models by Galbraith, Ullah and Zinde-Walsh (2002). Similarly, it
is straightforward to extend the results of observation 4.1 above to the VMA(q) case.
Let U be a nxq matrix containing the realisations of a VMA(q) process of the form
q
Ut = L AiEt-i + Et i=l
where Ut and Et are qx 1 vectors, the EtS are i.i.d. and the AiS are q x q coefficient
matrices. Then, using exactly the same reasoning as in observation 4.1, it is possible
to show that the residuals from this model have a VAR(oo) correlation structure, the
coefficient matrices of which are related to the bias terms in exactly the same way
as that given in equation (4.4). We forgo the proof of this result, as it is identical to
that of observation 4.1.
Figures 4.13 and 4.14 show the bias functions of the indirect inference estimators of
129

the elements ofthe matrix Al (solid lines) in a VMA(l) model with N(O,I) errors and
compares them to the bias estimates obtained using the simplified GLS bias reduction
technique (dashed lines). Those figures are based on 2000 Monte Carlo samples of
only 20 observations. The parameter matrix Al is defined as follows:
(
Œ 0.2) Al = -0.35 Œ
where Πvaries from -0.95 to 0.95. Both figures indicate that the extension of the GLS
bias reduction method to multivariate models works quite well. From figures 4.5 and
4.6, we can expect that the true GLS method would work better than what is se en
in figures 4.15 and 4.16.
Figure 4.15. Bias function, VMA(1) model, n=20.
0.3
0.2 ~ AlI - -A22
--AUgis 1 -cr A22g1s
0.1
.~ a:I 0
):>~ ~'" ~. ",'"
):>' ",'" ):>" .... '" ):>' <;:)~
<;:)" ~ <;:)
-0.1
-0.2
-0.3
Alpha
130

Figure 4.16. Bias function, VMA(l) model, n=20.
0.1
0.08 \ 1 \ -AIl --A 1 2gls J
0.06 \ - -A2I -fJ-A21gls 1 \ / \
0.04 , ~.\ '" '" i:Q
0.02 \\ ~
0
-0.04
Alpha
4.5 Unit root tests in the finite correlation case
In the introduction to this chapter, we mentioned the work of Park (2003) where the
AR(p) bootstrap is shown to yield asymptotic refinements for the ADF test. Precisely,
it is shown there that the bootstrap's ERP is of order o(n-1/2 ) rather than the usual
O(n-1/2 ) for the asymptotic test. Because the assumptions made by Park (2003) are
similar to those we have made in chapt ers 2 and 3, we conjecture that these results
could be extended to the MA(q) bootstrap case without any difficulties. This implies
that using an AR or MA bootstrap distribution to conduct ADF tests should yield
more precise inference in finite samples. Park(2003) sustains this affirmation with a
limited number of simulations. He considers a unit root pro cess whose first difference
is an AR(l) model with different parameter values and error term distributions and
finds that the bootstrap tests do indeed have better properties. However, he only looks
at a very restricted set of parameters, namely, -0.4, 0 and 0.4. For autoregressive
131

pro cesses with such parameters, the OLS estimator has a very litt le bias in small
samples (see the figures in the preceeding section). We consider a wider range of
parameters for the AR(I) model, some of which typically have a large bias in small
samples.
In or der to make our simulations comparable to, but more general than those of
Park (2003), we consider parameter values of -0.95, -0.90, -0.8, -004, 0, 004,0.8,0.90
and 0.95. The following figure shows ERPs computed from Monte Carlo simulations
of a unit root process performed at nominal level 5% with a stationary AR(I) first
difference and N(O,I) errors. For the asymptotic test, we used 150 000 replications
and critical value co.o5=-2.99 to generate the ERP function. For the bootstrap tests,
we have used 5000 Monte Carlo replications and B=499 for all bootstrap procedures.
The sample size is 25 and 4 lags are used to obtain the GLS bias estimates.
Figure 4.17. ERP function at 5%, AR(1) bootstrap ADF test, n=25.
0.025
0.02 -Unbiased
- -Asympt
0.015 - - . thetahat
-Dm
Alpha
Figure 4.17 shows the ERP function of the ADF test carried out with one lag and
a constant. The curve labelled Asympt corresponds to the ERP of the asymptotic
test while the one labelled thetahat gives the ERP of the simple AR(I) bootstrap
132

test where the bootstrap DGP uses the OLS estimator. The third curve, labelled
unbiased, gives the ERP of the AR(l) bootstrap test when the bootstrap DGP uses
the true parameter value. At first glance, the curves may appear to indicate that the
ERP is quite unstable. This impression, however, only results from the very small
scale of the vertical axis. In fact, the ERP of the bootstrap test based on either
the true parameter or the OLS estimate never exceeds 1% in absolute value, even
when the AR(l) parameter is close to 1 or -1. There are no circumstances where the
asymptotic test out-performs either bootstrap tests significantly. This is consistent
with Park's results.
Figure 4.18. ERP function at 5%, AR(1) bootstrap ADF test, n=25.
0.025
-thetahat 0.02 OLS
- ·CEe 0.015 •• 'GLSCBC
om ~ III
0.005
o --0.95 0 0.4 0.8 0.9 0.95
-0.005
-0.01
Alpha
Figure 4.18 shows the ERP function of the AR(l) bootstrap ADF test when the
bootstrap DGP is constructed using different bias corrected or reduced estimators. In
view of figure 4.17, there does not appear to be any point in using bias correction, for
the uncorrected bootstrap DGP already yields quite precise inferences. Thus, it cornes
as no surprise that, for almost all values of the AR parameter, all the bias corrected
bootstrap tests have ERPs similar to the uncorrected one. When the AR parameter
133

is close to 1, the results become most disappointing, as none of the bootstrap tests
based on bias corrected or reduced estimators perform as weU as the one based on
OLS. This may result from the additional randomness which is added by the bias
correction or reduction procedures, see figure 4.12.
It is quite common for macroeconomic time series to be driven by MA(l) processes.
It therefore appears important to study the effects of using an MA(l) bootstrap DGP
to conduct ADF tests rather than relying on the usual DF critical values. We have
run sorne simulations, the results of which are presented in figures 4.19 to 4.21. The
DGP was a unit root pro cess whose first difference is a simple MA(l) model with
N(O,l) errors. The values of the MA parameters considered were -0.99, -0.9, -0.8,
-0.6, ... , 0.6, 0.8, 0.9, 0.99, for a total of 13 DGPs. We have utilised two sample
sizes: 25 and 100 observations. When n = 25, we have used 150 000 Monte Carlo
samples and critical value co.o5=-2.99 to generate the ERP function of the test based
on the DF distribution and 5 000 Monte Carlo samples with 499 bootstrap samples
per replication to estimate the different bootstrap tests. AU bias correction requiring
the use of the bootstrap also used 499 such samples. FinaUy, the ADF lag order was
set to 4, as were the lag orders necessary to obtain GZW (1994)'s estimates and the
GLS bias reduced estimators. When n = 100, we have used 100 000 Monte Carlo
samples and critical value co.o5=-2.90 to generate the ERP function of the test based
on the DF distribution and 3 000 Monte Carlo samples with 499 bootstrap samples
per replication to estimate the different bootstrap tests and bootstrap bias corrected
estimates. AU the necessary lag orders were set to 8. Notice that the increase from 4
to 8 satisfies the theoretical restrictions imposed in the previous chapters.
134

Figure 4.19. ERP at 5%, MA(l) bootstrap ADF test, n=25.
0.1
0.08
0.06
0.04
0.02
-0.02
Them
" • 'B<lotmap
- "Asympt -Unbiased
Figure 4.19 shows that the test based on asymptotic critical values with n = 25
severely over-rejects for large negative values of 0 because of the near-cancellation
of the MA root with the unit root. This is a very well known feature of unit root
tests (see, among others, Chang and Park, 2003 for simulation evidence). The simple
MA(l) bootstrap (also shown in figure 4.19) corrects some of the ERP but still has
substantial problems. In particular, it does not improve at all upon the asymptotic
test for large negative parameters. It is most likely that its failure at providing a low
ERP test is due to the fact that it is based on bootstrap samples built using a biased
estimator of O. To illustrate this, we have computed the ERP of the MA(l) bootstrap
test with the true value of 0, ie, we have set ê = 00 in the bootstrap DGP. The results
are labeled unbiased and represented as a thick black curve in figure 4.19. Similar
results were obtained at nominallevel 10%.
Figure 4.19 makes evident the fact that the MA(l) bootstrap test's ERP results
from the bias in the estimation of O. Consequently, it makes sense to attempt to
correct or at least reduce this bias before building bootstrap samples. Figure 4.20
135

shows the ERP of the MA(l) bootstrap test when n = 25 and the bootstrap DGP is
built using sorne of the bias corrected or reduced estimators studied in the preceding
section. The results are not surprising: the three techniques allow us to decrease
the ERP. Further, it can be se en that, when () is close to -1, using the GLSCBC
estimator yields more precise tests than the GLS bias reduced estimator, which in
turn yields more precise tests than the CBC estimator. This is in accordance with
figures 4.3 and 4.4. lndeed, we saw there that the GLSCBC and GLS methods offer
better bias reduction than CBC when () is large and negative. This was also true for
large positive parameters, but accurate estimation of () is less crucial for unit root
tests in such cases because there is no near-cancellation of the roots.
Figure 4.20. ERP at 5%, MA(l) bootstrap ADF test, n=25.
0.08
0.07 -OQotstrap
0.06 - - 'GLS
0.05 - -CBC -GLSCBC
0.04 •
~ 0.03 !l.l
0.02
0.01
0
-0.01 -0.99 -0.9
-0.02
Them
Once more, the exact same features were found for tests at nominal level 10%.
Figure 4.21 also shows similar features in samples of 100 observations.
136

Figure 4.21. ERP at 5%, MA(l) bootstrap ADF test, n=lOO.
~ ILl
0.45
OA
0.35
0.3
0.25
0.2
0.15
0.1
0.05
0
, , \' , \\ " ,\. \\'. . " \~ , ,
..... ~
-thetahat
--OLS
- - 'CBC - -OLSGBC
~
*-., .... , 1
_0.05.~1..~9 .. 9 -0.8 -0.6 ..(),4 -0.2 0 O,2 .. Q,LJl.6 0.8 0.9 0.99j
Theta
In light of those simulations, it seems that using bias corrected or reduced estima
tors to build the bootstrap DGP may or may not be useful, depending on the form of
the DGP. Further, the simple simulation experiments we present here do not address
the question of what happens if we try to use bias correction under the alternative.
In such cases, it is clearly not appropriate to apply the bias correction to the first
difference of Yt because it does not follow a usual ARMA(p,q) process. As an illus
tration, let Yt = P Yt-l +Ut, where Ut is an AR(l) process. Clearly, tlYt is an AR(l)
model only under the null hypothesis. Under the alternative, tlYt = (p - l)Yt-l+Ut.
Applying bias correction techniques to the estimator resulting from the fitting of an
AR(l) model to tlYt is therefore incorrect. A potential solution would be to use the
partial first difference of Yt which we define as tl-Yt = Yt - PYt-l, where P is any con
sistent estimator of p. By the consistency of p, tlYt is always asymptotically AR(l).
This idea is similar to the residual based block bootstrap introduced by Paparoditis
and Politis (2003). We do not pur sue it here.
137

4.6 Infinite autocorrelation
While some economic unit root time series may have finite or der autocorrelated first
differences, it is not at aU unlikely that others may have a generallinear process form
which does not take a finite order ARMA(p,q) form. It is usual practice in such cases
to use either a block or AR sieve bootstrap method to obtain better test accuracy
under the nuU in finite sample. We have shown in the preceding three chapt ers that
MA and ARMA sieve bootstrap test can also be used and that they often have far
better smaU sample properties. We now provide simulation evidence to the effect
that basing the bootstrap DGP on bias corrected or bias reduced estimators may
yield tests with lower finite sam pIe ERPs.
Since the sieve bootstrap DGP is a finite or der approximation of the true infinite
order proccss, bias correction or reduction here takes on the meaning of finding a
bootstrap DGP closer to the true DGP in some metric. Let /10 denote the true DGP
of the infinite order pro cess under consideration. Suppose that we want to base our
bootstrap inference on a finite order DGP which belongs to the model Ml' Then,
we would like to build our bootstrap samples using the DGP /11 E Ml which is the
closest to /10, Unfortunately, /11 is not known and we must consequently use a DGP
based on parameter estimation, which we will caU Pl' Evidently, the closer Pl is to
/11, the more accurate we expect the bootstrap inference to be. Hence, bias correction
of the parameters of the bootstrap DGP (Pl) is desirable if it results in a new DGP
(say, P,1) which is closer to /11 than Pl.
In or der to investigate this issue through simulations, we must first be able to
identify /11 for any /10, Of course, this depends on how we define the distance between
P'o and Ml' A very popular way to do this is to use the Kullback-Leibler Informa
tion Criterion (KLIC). Let G denote the cumulative probability distribution function
corresponding to /10 and F that corresponding to some /11. Further, let 9 and f be
138

the densities corresponding to Gand F. Then, the KLIC is
l(g, 1) = EJ.to (log [g/ fD
where EJ.to denotes expectation under the true DGP. The DGP /-li that minimises
lU, g) is called the pseudo-true DGP, and is characterised by parameters which are
the probability limit of the quasi-maximum likelihood estimator of /-li under proba
bilities determined by /-lo, see White (1982).
Let us con si der for example the problem of finding the pseudo-true parameters of
an AR(2) model when the true DGP is an MA(l) process. Let Yt = (JCt-l + Ct be the
true MA(l) pro cess and let Yt = ŒIYt-l + Œ2Yt-2 + Ut be the approximating AR(2)
model. Then, GMM estimation of Œl and Œ2 requires that the following equations be
satisfied: 1 n
- LUt = 0 n t=l
1 n
- LYt-lUt = 0 n t=l
1 n
- LYt-2Ut = 0 n t=l
where n is the sample size and we have assumed that Yo and Y-l are known. In or der
to find the pseudo-true parameter values, we must replace these sample moment
equations by their expectation counterparts, that is:
EYt-lUt = 0
Substituting the true DGP in the first equation yields:
139

Since Ect=O, this equation is not informative because it is always equal to 0 for any
values of al and a2. On the other hand, the other two equations give:
where 0"; is the variance of Ct. Solving these for al and a2 gives us the pseudo-true
values as a function of e:
( e ) ( e )2 ( e 1)-1
al = 1 + e2 - 1 + e2 1 + e2 - e - e
( e ) ( e 1)-1
a2 = 1 + e2 1 + e2 - e - e In a similar manner, the pseudo-true parameters of an AR(3) approximation to an
MA(l) model are given by the following equations:
al = - [ (1~' 0' ) (1: 0') [2 (1~' 0') -0' -1]-1] + (1: 0')
a, = C~' 0') [2 C ~'O' ) - 0' - r a3 = - (1 : 0' ) (1: 0') [2 C ~'o, ) - 0' -r
More generally, if p denotes the or der of the approximating AR model,
These equations are refered to as binding functions. It must be noted that, if
the AR approximation is of infinite order, then the binding functions linking its
parameters to those of the true MA( 1) model are the ones used to carry out analytical
indirect inference. This occurs because the MA(l) model can be written as an AR( 00).
140

Because the pseudo-true DG P is the close st element in the set of approximating
models to the true DG P, it naturally follows that an ideal sieve bootstrap test should
be based on it. For the AR approximation of an MA process, the OLS estimator pro
vides consistent estimates of the pseudo-true parameters. However, OLS estimation
is biased and it should therefore be expected that a bias corrected estimator would
yield more precise sieve bootstrap tests.
4.6.1 An example of bias correction
As a first step towards investigating this issue, we have considered the performances
of the CBC and GLS bias correction and reduction methods when they are applied to
the parameters of an AR sieve model. The next two figures show the bias functions
of the parameters of an AR(2) model used to approximate an MA(l) process for
different values of the sole MA parameter. The bias is defined as the difference
between the expectation of the estimators and the pseudo-true parameter values. We
only consider the CBC and GLS bias correction methods. We have used 5000 Monte
Carlo samples of 25 observations and 4000 bootstrap replications for the CBC. The
GLS bias reduction was carried out using five lags.
141

Figure 4.22. Bias O:r, MA(l) model, n=25.
0'.25
0.2 ...... ... -", . - ~
0.15
0.1
~ 0'.05
iÏÎ 0
-0.95 -0.9 -0.05
-0.1
-0.15
-0.2
.,
.. --
-0.8 -0.4
--. ..
o
Alpha 1
-OLS - -CBC - - • OLS
-"
0.4 .. tr.8" -,
........ '"
Figure 4.23. Bias 0:2, MA(l) model, n=25.
0'.2
-OLS 0.15
- -CBC - • 'OLS
0.1 •
~ iÏÎ ... "" .... - .. .... '"
0.05
0
-0.05
.,.' • . ,
..... ..... ,.. ..... - ..
"",-
o Jl..4' ""'......;O~_~_~5 - -Alpha 2
The first thing to notice from these two figures is the fact that the OLS estimators
are usually not severely biased. It might therefore not be such a good idea to use
bias correction methods. Even though the bias is small, the CBC method estimates it
142
relatively weIl most of the time. On the other hand, the GLS procedure experiences
severe difficulties, especially around the borders of the invertibility region. This may
be explained by the fact that the G LS method is based on binding functions that
correspond to the AR( (0) form of the true process. It therefore has a tendency to
correct the original estimates towards these values.
4.6.2 Bias correction and ARSB tests
Let us now consider ARSB ADF tests when the DGP is built using bias corrected
or bias reduced estimators. Because of the very bad properties of the GLS bias
reduced estimator when it is applied to AR models, we have limited ourselves to
CBC estimates. The following figure shows the ERP of the ARSB ADF test of or der
2 based on OLS parameter estimates as weIl as on CBC corrected estimates and on the
pseudo-true parameters. The figure was generated from 2500 Monte Carlo samples
of 25 observations and the tests were carried out using 999 bootstrap samples. The
DGP of the first difference process was an MA(l) and different values of the sole
parameter e were used.
This figure indicates that the bias correction is not use fuI at aIl. Indeed, the three
tests have identical ERP for every DGP considered. This makes a lot of sense because,
as we have seen in the preceding subsection, the OLS estimates are virtually unbiased
with respect to the pseudo-true parameters. Almost identical results were obtained
with an AR(3) sieve bootstrap and with several other first difference DGPs.
143
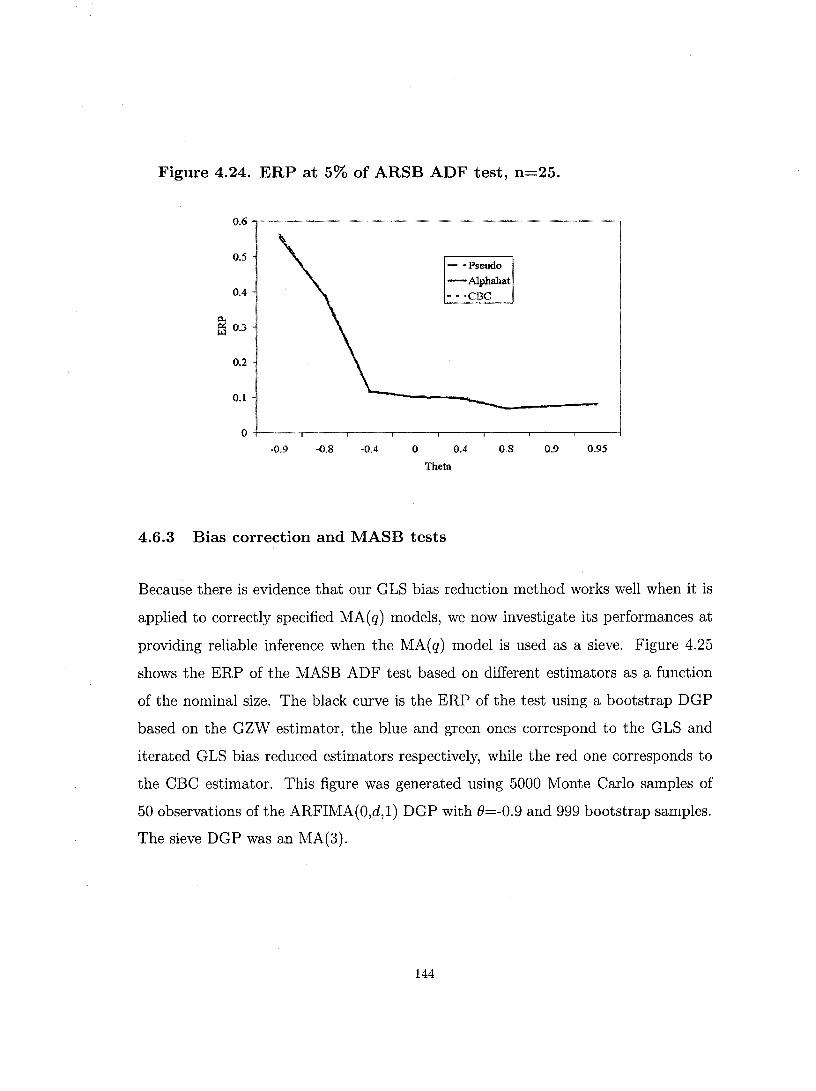
Figure 4.24. ERP at 5% of ARSB ADF test, n=25.
0.6
0.5 - ·Pseudo -AlplUlhat
004 •• 'CBe
~ 0.3
0.2
0.1
-0.9 -0.8 -OA o 0.4 0.8 0.9 0.95
Them
4.6.3 Bias correction and MASB tests
Because there is evidence that our GLS bias reduction method works well when it is
applied to correctly specified MA(q) models, we now investigate its performances at
providing reliable inference when the MA(q) model is used as a sieve. Figure 4.25
shows the ERP of the MASB ADF test based on different estimators as a function
of the nominal size. The black curve is the ERP of the test using a bootstrap DG P
based on the GZW estimator, the blue and green ones correspond to the GLS and
iterated GLS bias reduced estimators respectively, while the red one corresponds to
the CBC estimator. This figure was generated using 5000 Monte Carlo samples of
50 observations of the ARFIMA(O,d,l) DGP with 8=-0.9 and 999 bootstrap samples.
The sieve DGP was an MA(3).
144

Figure 4.25. ERP at 5% of MASB ADF test, ARFIMA(O,d,l) DGP,
n=50.
~ !:LI
0.16
0.14
0.12
0.1
0.08
0.06
0.04
0.02
-thetahat •• 'GLS
- -GLSIT
-cac
,------~-----~~~~~ .::'"" ................. _-_ ...... _- ............. __ .- .. '-_ ........ --._-
O+-~--~~~--~~--~~~~~~_~·_-·~ __ -.~.~~'~I _0.020' l 0.03 0.050.070.09 0.11 0.13 0.15 0.170.190.21 0.23 0.25 0.21"(1.291
1 .. ! -0.04
Nominal Size
The MA8B based on the GL8 and iterated GL8 bias reduced estimators are signif
icantly more precise than the one based on the GZW estimator. On the other hand,
the one based on the CBC estimator has higher ERP, This may be linked to the fact
observed earlier that the G L8 method provides better bias correction than the CBC
for MA(q) models, especially in the presence of a large negative MA parameter. To
verify the robustness of these features, we have run another set of experiments, this
time, using the DGP we called MAI in the previous chapter with a parameter e equal
to -0.9. Recall that this DGP was very similar to an inverted AR(I) process, but with
higher persistence.
145

Figure 4.26. ERP at 5% of MASB ADF test, MAI model, n=50.
0.1 ;-~~o_o~ o_oO_~ _____ oo' __ , __ o~O_o""O'_ooo'~'o'_""'o,o~'_'O'"0' o<o •. ~ooo.o.o~ •• "'"
0.09
0.08
0.01"
0.06
~ 0.05
0.04 -
0.03
0.02
0.01
-thetahat
- - 'OLS - -- -GLSIT -CBC
O+--r--'-~-.--.--r--.--.-'--'--.--.--.-'~
0.01 0.030.050.070.09 O.Il 0.13 0.15 0.17 0.190.210.230.25 0.270.29
Nominal Size
This time there is no appreciable accuracy gain from using the GLS, GLSIT or
CBC estimators to build the bootstrap DGP. This indicates that the fine performances
of the MASB ADF tests based on the GLS bias reduced estimator displayed in figure
4.25 may indeed be due to the large negative MA parameter. On the other hand, there
does not seem to be any loss. Thus, based on our very limited simulations, it appears
that building MA sieve bootstrap DGPs using the GLS bias reduced estimator is
desirable.
4.7 Conclusion
In this chapter, we have introduced a new method to estimate the bias of pure AR
and MA models parameter estimates. This method, which is based on the GLS trans
formation matrix, yields a consistent estimator and, according to our simulations, is
most useful when used with MA models. Unfortunately, it does not appear to per
form well when used on AR models. It can also be extended to ARMA(p,q) models,
146

but its implementation becomes more complicated.
We have argued that the accuracy of bootstrap tests may, in small samples, be in
versely related to the bias of the estimator used to build the bootstrap DG P. Through
a short simulation study, we have illustrated this facto Our simulations also provided
evidence to the effect that using bias corrected or bias reduced estimators to build
bootstrap samples may improve the quality of the resulting inference in the case of
ADF unit root tests.
We have also used bias corrected and bias reduced estimators to build sieve boot
strap samples. In this case, bias may be considered as the distance between the
expectation of the sieve bootstrap DGP and the pseudo-true DGP. As an example,
we have considered the approximation of an MA(l) model by an AR(2) model and
found that OLS estimates are not severely biased. The CBC appeared to give inter
esting bias correction while the GLS method seemed to be inadequate. Using bias
corrected or bias reduced estimators to build ARSB samples to carry out ADF tests
has not yielded any measurable improvement over OLS. This may be explained by
the fact that OLS parameters are not severely biased. On the other hand, using the
GLS bias reduced estimator to build MASB samples has been shown to significantly
reduce the ERP of the ADF test in one case where a large negative MA parameter
was present in the DGP.
147

Chapter 5
Conclusion
This thesis has studied sorne aspects of the utilisation of bootstrap methods to carry
out ADF unit root tests. The motivation for this is that standard testing procedures
tend to over-reject the null hypothesis in sever al situations. Since the bootstrap often
provides a simple way to reduce ERP, it seems natural to apply it to unit root testing.
We have mainly concerned ourselves with cases where the true first difference
pro cess has a general linear pro cess form, although chapter 4 also considered finite
order autocorrelated models. In both situations, ADF tests based on asymptotic
theory are often found to have very important ERP problems and the use of bootstrap
critical values is therefore often desirable. However, for the bootstrap to provide any
accuracy gain over asymptotic theory, it is necessary that the bootstrap DGP be as
good an approximation to the true DGP as possible.
When the true DG P has a general linear process form, the task of finding an
appropriate approximation is a difficult one. One way that has been suggested in the
literature is to use a finite order autoregressive model. In particular, it was shown
by Park (2002) and Chang and Park (2003) that ADF tests based on these AR sieve
148

bootstrap models are asymptotically valid. We argued that there is no compelling
reason to prefer AR(p) models to other, more general, ARMA(p,q) models. We
therefore introduced MA(q) and ARMA(p,q) sieve bootstrap methods and show that
ADF tests based on them are asymptotically valid.
The finite sample properties of these different sieve bootstrap ADF tests were in
vestigated by Monte Carlo experiments. We found that the MA and ARMA bootstrap
ADF tests are reasonably robust to the underlying DGP and improve significantly
over the AR sieve when a large MA root is present. Further, the ARMA sieve requires
only very small parametric orders to perform as well as the other two.
Through these simulations, the AR sieve bootstrap ADF test was shown to have
an ERP comparable to that of the asymptotic test when the true DGP has a very
strong and long correlation structure. We argued that this depends on its incapacity
to generate sufficiently correlated residuals in the ADF regression. This results in
a bootstrap distribution that is much closer to the asymptotic distribution than to
the actual one. We proposed a solution that consists of using less lags in the AR
sieve bootstrap ADF regression than in the AR sieve bootstrap DGP. This effectively
shifts the bootstrap distribution to a position closer to the actual one, thus reducing
ERP. We also proposed a modified version of the fast double bootstrap that allows a
further gain of accuracy.
Building a bootstrap DGP with characteristics similar to those of the true DGP
may be challenging, even when the latter has a finite correlation structure. Indeed,
consistent estimators are often biased and their bias may be considerable for sorne
DGPs and sample sizes. We therefore proposed to build bootstrap DGPs using bias
corrected or bias reduced estimators. We introduced such an estimator based on
the GLS transformation matrix for ARMA(p,q) models. Our simulations indicated
that it may yield better bias reduction than the most commonly used bootstrap
149

bias correction for MA(q) models. We also found evidence to the effect that using
bias reduced or bias corrected estimators to build an MA(l) bootstrap DGP for the
purpose of unit root testing may be very beneficial when the true DGP really is an
MA(l). Finally, based on a very limited set of simulations, it appears that using bias
reduced or bias corrected estimators to build MA sieve bootstrap DGPs when the
data is generated by a generallinear pro cess may or may not be useful, depending on
the nature of the DGP.
150

References
Abadir, K. M. (1995). "The limiting distribution of the t ratio under a unit root,"
Econometrie Theory, Il,775-93.
Agiakoglou, C. and P. Newbold (1992). "Empirical evidence on Dickey-Fuller type
tests," Journal of Time Series Analysis, 13, 471-83.
An, H. Z., G. Z. Chan and E. J. Hannan (1982). "Autocorrelation, autoregression
and autoregressive approximation," Annals of Statistics, 10, 926-36.
Andrews, D. W. K. (1993). "Exactly median-unbiased estimation of the first-order
autoregressivejunit-root models," Econometries, 61, 139-65.
Andrews, D. W. K. (2004). "The block block bootstrap: improved asymptotic refine
ments," Econometrica, 72, 673-700.
Baxter, G. (1962). "An asymptotic result for the finite predictor," Mathematica
Scandinavia, 10, 137-44.
Berk, K. N. (1974). "Consistent autoregressive spectral estimates." Annals of Sta
tistics, 2, 489-502.
Bickel, P. J. and P. Bühlmann (1999). "A new mixing notion and functional central
limit theorems for a sieve bootstrap in time series," Bernouilli, 5, 413-46.
Bierens, H. J. (2001). "Unit roots," Ch. 29 in A Companion to Econometrie
Theory, ed. B. Baltagi, Oxford, Blackwell Publishers, 610-33.
Bühlmann, P. (1997). "Sieve bootstrap for time series," Bernoulli, 3, 123-48.
Bühlmann, P. (1998). "Sieve bootstrap for smoothing in nonstationarity time series,"
Annals of Statistics, 26, 48-83.
151

Chang, Y. and J. Y. Park (2002). "On the asymptotics of ADF tests for unit roots,"
Econometrie Reviews, 21, 431-47.
Chang, Y. and J. Y. Park (2003). "A sieve bootstrap for the test of a unit root,"
Journal of Time Series Analysis, 24, 379-400.
Choi, E. and P. Hall (2000). "Bootstrap confidence regions computed from autore
gressions of arbitrary order," Journal of the Royal Statistical Society B series,
62,461-77.
Davidson, J. E. H. (2006). "Asymptotic methods and functional central limit theo
rems," ch. in Palgrave Handbooks of Econometries, eds. T. C. Mills and K.
Patterson, Palgrave-Macmillan.
Davidson, R. and E. Flachaire (2001). "The wild bootstrap, tamed at last," Working
paper GREQAM.
Davidson, R. and E. Flachaire (2004). "Asymptotic and bootstrap inference for
inequality and poverty measures," working paper, GREQAM.
Davidson, R. and J. G. MacKinnon (1998). "Graphical methods for investigating the
size and power of hypothesis tests," The Manchester School, 66, 1-26.
Davidson, R. and J. G. MacKinnon (2004). "Econometric Theory and Methods,"
Oxford, Oxford University Press.
Davidson, R. and J. G. MacKinnon (2006a). "Improving the reliability of bootstrap
tests," Working paper, Queen's and Mc Gill Universities.
Davidson, R. and J. G. MacKinnon (2006b). "Bootstrap inference in a linear equation
estimated by instrumental variables," Working paper, Queen's and McGill Universi
ties.
152

Dickey, D. A. and W. A. Fuller (1979). "Distribution of the estimators for autore
gressive time series with a unit root," Journal of the American Statistical As
sociation, 74, 427-31.
Diebold, F. X. and G. Rudebush (1989). "Long memory and persistence in aggregate
output," Journal of Monetary Economics, 24, 189-209.
Diebold, F. X. and G. Rudebush (1991). "Is consumption too smooth? Long memory
and the Deaton paradox," Review of Economics and Statistics, 74, 1-9.
Dufour, J.M. and J. Kiviet (1998). "Exact inference methods for first order autore
gressive distributed lag models," Econometrica, 66, 79-104.
Galbraith, J. W. and V. Zinde-Walsh (1992). "The GLS transformation matrix and a
semi-recursive estimator for the linear regression model with ARMA errors," Econo
metric Theory, 8, 143-55.
Galbraith, J. W. and V. Zinde-Walsh (1994). "A simple noniterative estimator for
moving average models," Biometrika, 81, 143-55.
Galbraith, J. W. and V. Zinde-Walsh (1997). "On some simple, autoregression-based
estimation and identification techniques for ARMA models," Biometrika, 84, 685-
96.
Galbraith, J. W. and V. Zinde-Walsh (1999). "On the distribution of Augmented
Dickey-Fuller statistics in pro cesses with moving average components," Journal of
Econometrics, 93, 25-47.
Galbraith, J. W. and V. Zinde-Walsh (2001). "Analytical indirect inference," Working
paper, McGill University.
Galbraith, J. W., Ullah, A. and V. Zinde-Walsh (2002). "Estimation of the vector
153

moving average model by vector autoregression," Econometric Reviews, 21, 205-
19.
Gouriéroux, C., A. Monfort and E. Renault (1993). "Indirect inference," Journal
of Applied Econometrics, 8, 885-118.
Gouriéroux, C., E. Renault and N. Touzi (1997). "Calibration by simulation for
small sample bias correction," in Simulation-based Inference in Econometrics:
Methods and Applications, eds. R. Mariano, M. Weeks and T. 8chuermann,
Cambridge, Cambridge University Press.
Granger, C. W. J. (1980). "Long memory relationships and the aggregation of dy
namic models," Journal of Econometrics, 14, 227-38.
Grenander, U and G. 8zego (1958). "Toeplitz forms and their applications," Berkeley,
University of California Press.
Hall, A. (1994). "Testing for a unit root in time series with pretest data-based model
selection," Journal of Business and Economic Statistics, 12,461-70.
Hall, P. and C. C. Heide (1980). "Martingale limit theory and its applications,"
New-York, Academie Press.
Hall, P., J. L. Horowitz (1996). "Bootstrap critical values for tests based on gen
eralisez method of moments estimators with dependent data," Econometrica, 64,
891-916.
Hall, P., J. L. Horowitz and B. Y. Jing (1995). "On blocking rules for the bootstrap
with dependent data," Biometrika, 82, 561-74.
Hannan, E. J. and L. Kavalieris (1986). "Regression, autoregression models," Jour
nal of Time Series Analysis, 7, 27-49.
154

Hayashi, F. (2000). Econometrics, Princeton, Princeton University Press.
Hirukawa, M. (2006). "An improved GMM bootstrap for time series with a nonpara
metric prewhitened covariance estimator," working paper, Concordia University.
Inoue, A. and M. Shintani (2006). "Bootstrapping GMM estimators for time series,"
Journal of Econometrics, 133, 531-55.
Kendall, M. G. (1954). "Note on the bias in the estimation of autoeorrelation,"
Biometrika, 41, 403-04.
Koreisha, S. and T. Pukkilla (1990). "A generalised least squares approach for estima
tion of autoregressive moving average models," Journal of Time Series Analysis,
Il, 139-51.
Kreiss, J. P. (1992). "Bootstrap procedures for AR(oo) processes," in Bootstrapping
and Related Techniques, Lecture Notes in Economics and Mathematical
Systems 376, ed. K. H. Jëckel, G. Rothe and W. Senders, Heidelberg, Springer.
Kwiatkowski, D., P. C. B. Philips, P. Schmidt and Y. Shin (1992). "Testing the
null hypothesis of stationarity against the alternative of a unit root," Journal of
Econometrics, 54, 159-78.
MaeKinnon, J. G. (1996). "Numerical distribution functions for unit root and coin
tegration tests," Journal of Applied Econometrics, 14, 563-77.
MacKinnon, J. G. and A. A. Smith. (1998). "Approximate bias correction in econo
metrics," Journal of Econometrics, 85, 205-30.
Maddala, G. S. and 1. M. Kim (1998). Unit roots, cointegration and structural
change, Cambridge, Cambridge University Press.
Moriez, F. (1976). "Moment inequalities and the strong law of large numbers,"
155

Zeitschrift für Wahrscheinlichkeitstheorie und Verwandte Gebeite, 35,
298-314.
Nankervis, J. C. and N. E. Savin (1996). "The level and power of the bootstrap
t test in the AR(I) model with trend," Journal of Business and Economic
Statistics, 14, 161-68.
Ng. S. and P. Perron (1995). "Unit root tests in ARMA models with data depen
dent methods for the selection of the truncation lag," Journal of the American
Statistical Association 90, 268-81.
Ng. S. and P. Perron (1995). "Lag length selection and the construction of unit root
tests with good size and power," Econometrica, 69, 1519-54.
Palm, F. C., S. Smeekes and J. P. Urbain (2006). "Bootstrap unit root tests: com
parison and extensions," working paper, Universiteit Maastricht.
Park, J. Y. (2002). "An invariance principle for sieve bootstrap in time series,"
Econometric Theory, 18,469-90.
Park, J. Y. (2003). "Bootstrap Unit root tests," Econometrica, 71, 1845-95.
Parker, C., Paparoditis, E. and D. N. Politis (2006). "Unit root testing via the
stationary bootstrap," Journal of Econometrics, forthcoming.
Paparoditis, E. and D. N. Politis (2001). "Tapered block bootstrap," Biometrika,
88, 1105-19.
Paparoditis, E. and D. N. Politis (2001). "The tapered block bootstrap for general
statistics from stationary sequences," Econometrics Journal, 5, 131-48.
Paparoditis, E. and D. N. Politis (2003). "Residual based block bootstrap for unit
root testing," Econometrica, 71, 813-55.
156

Perron. P. and S. Ng (1996). "Useful modifications to sorne unit root tests with
dependent errors and their local asymptotic properties," Review of Economic
Studies, 63, 435-63.
Philips, P. C. B. (1987). "Time series regression with a unit root," Econometrica.
55, 277-301.
Philips, P. C. B. and V. Solo (1992). "Asymptotics for linear processes," Annals of
Statistics, 20, 971-1001.
Philips, P. C. B. and P. Perron (1988). "Testing for a unit root in time series regres
sion," Biometrika, 75, 335-46.
Politis, D. N. and J. P. Romano (1994). "The stationary bootstrap," Journal of
the American Statistical Association, 89, 1303-13.
Politis, D. N. and H. White (2004). "Automatic blick length selection for the depen
dent bootstrap," Econometric Reviews, 23, 53-70.
Porter-Hudak, S. (1990). "An application of the seasonal fractional difference model
to the monetary aggregates," Journal of the American Statistical Associa
tion, 85, 338-44.
Psaradakis, Z. (2001). "Bootstrap tests for a autoregressive unit root in the presence
of weakly dependent errors," Journal of Time Series Analysis, 22, 577-94.
Said, E. S. and D. A. Dickey (1984). "Testing for unit roots in autoregressive-moving
average models of unknown order," Biometrika, 71, 599-607.
Said, E. S. and D. A. Dickey (1985). "Hypothesis testing in ARIMA(p,l,q) models,"
Journal of the American Statistical Association, 80, 369-374.
Saikkonen, P. and R. Luukkonen (1993). "Testing for a moving average unit root
157

in ARIMA models," Journal of the American Statistical Association, 88,
596-601.
Sakhanenko, A. 1. (1980). "On unimprovable estimates of the rate of convergence
in invariance principIe," in Nonparametric Statistical Inference, Colloquia
Mathematica Societatis Janos Bolyai, 32, 779-83
Schwert, G. W. (1989). "Testing for unit roots: a Monte Carlo investigation," Jour
nal of Business and Economic Statistics, 7, 147-59.
Shea, G. S. (1991). "Uncertainty and implied variance bounds in long memory models
of the interest rate term structure," Empirical Economics, 16, 287-312.
Smith, A. A. (1993). "Estimating nonlinear time series models using simulated vector
autoregressions," Journal of Applied Econometrics, 8, S63-S84.
Smith, A. A., F. Sowell and S. E. Zin (1997). "Fractional integration with drift:
estimation in small sampIes," Empirical Economics, 22, 103-16.
Swensen, A. R. (2003). "Bootstrapping unit root tests for integrated processes,"
Journal of Time Series Analysis, 24, 99-126.
White, H. (1982). "Maximum likelihood estimation of misspecified models," Econo
metrica, 50, 1-26.
Weierstrass, K. (1903). "Neuer beweis der satzer, das jede ganze rationale funktion
einer verandserlicher dargestellt werden kann aIs ein produkt aus linearen funktionen
derselben verandserlicher," Gesammelte Werke, 3, 251-69.
158

Appendix A
Mathematical Proofs
Proof of Lemma 2.1.
First, consider the following expression from Park (2002, equation 19):
(A.l)
where the coefficients Œj,l are pseudo-true values defined so that the equality ho Ids
and the ej,t are uncorrelated with the Ut-k> k = 0,1,2, ... r. Using once again the
results of GZW (1994), we define
7fq,l = Œj,l
7fq,2 = Œj,2 + Œj,l 7fq,l
7fq,q = Œj,q + Œj,q-l7fq,l + ... + Œj,17fq,q-1
to be the moving average parameters deduced from the pseudo-true parameters of
the AR model (A.l). It is shown in Hannan and Kavalieris (1986) that
159

where âJ,i are OLS or Yule-Walker estimates (an equivalent result is shown to hold
in probability in Baxter (1962)). Further, they show that
J 00
L laJ,k - akl :::; c L lakl = 0(1-8). k=l k=J+1
where c is a constant. This yields part 1 of lemma 3.1 of Park (2002):
Now, it follows from the equations of GZW (1994) that:
k-1 l7rq,k - 1Tkl = L (âJ,k-j7rq,j - ak_j1Tj)
j=O (A.2)
Of course, it is possible to express all the 7r q,k and 1Tk as functions of the â J,k and ak
respectively. For example, we have 1T1 = al, 1T2 = ai + a2, 1T3 = ar + 2a1a2 + a3 and
so forth. It is therefore possible to rewrite (A.2) for any k as a function of âJ,j and
aj, j=l, ... k. To clarify this, let us consider, as an illustration, the case of k=3:
l7rq,3 - 1T31 = lâ;,l + â J,lâ J,2 + âJ,l â J,2 + â J,3 - ar - a1 a 2 - a1 a 2 - a31
using the triangle inequality:
Thus, using the results of lemma 3.1 of Park (2002), l7rq ,3 - 1T31 can be at most
o [(log n/n)1/2] + 0(1-8). Similarly, l7rq,4 - 1T41 can be at most 0 [(log n/n)1/2] +
0(1-8) and so forth. Generalizing this and considering that we have assumed that
the or der of the MA model increases at the same rate as the order of the AR approx
imation, so that we can replace f by q in the preceding expressions, yields the stated
result. The other two results follow in a similar manner.
Proof of Lemma 2.2.
First note that n1-r/2E* lé*lr = n1-r/2 (1. ",n_ It - 1. ",n_ tir) because the boot-, t n wt-1 q,t n wt-1 q,t
strap errors are drawn from the series of recentered residuals from the MA( q) model.
160

Therefore, what must be shown is that
l-r/2 (1 Ln lA 1 Ln A Ir) a.s. 0 n - Ct-- Ct -t n q, n q, t=l t=l
as n-t 00. If we add and subtract Ct and Cq,t (which was defined in equation 2.6)
inside the absolute value operator, we obtain:
where c is a constant and
To get the desired result, one must show that nl-r/2 times An, Bn' en and Dn each
go to 0 almost surely.
1 l-r/2A a.s. 0 . n n -t .
This ho Ids by the strong law of large numbers which states that An ~ E Ictlr which
has been assumed to be finite. Since r > 4, 1 - r /2 < -1 from which the result
follows.
2 l-r/2B a.s. 0 . n n -t .
This is proved by showing that
(A.3)
ho Ids uniformly in t and where s is as specified in assumption 2.1 part b. We begin
161

by recalling that from equation (2.6) we have
q
Cq,t = Ut - L 7rkCq,t-k'
k=l
Writing this using an infinite AR form:
00
Cq,t = Ut - L ŒkUt-k
k=l
where the parameters Œk are functions of the first q true parameters 7rk in the usual
manner (see proof of lemma 2.1). We also have:
00
Ct = Ut - L 7rkCt-k·
k=l
which we also write in AR( 00) form:
00
Ct = Ut - L ŒkUt-k·
k=l
Evidently, Œk = Œk for aIl k = 1, ... , q. Subtracting the second of these two expressions
to the first we obtain: 00
Cq,t - Ct = L (ak - Œk) Ut-k (A.4) k=q+l
Using Minkowski's inequality, the triangle inequality and the stationarity of Ut,
The second element of the right hand side can be rewritten as
that is, we have a sequence of the sort: -(7rq+1 +7rq+2+7rlaq+l +7rq+3+7rlaq+2+7r2aq+l ... )
Then, it follows from assumptions 2.1 band 2.2 that
(A.6)
because EIUtlT < 00 (see Park 2002, equation 25, p. 483). The equality (A.6) together
with the inequality (A.5) imply that equation (A.3) holds. In turn, equation (A.3)
162

implies that n 1- r/2 En ~ 0 is true, provided that q increases at a proper rate, such
as the one specified in assumption 2.2.
3 l-r/2C a.s. 0 . n n--+
We start from the AR( (0) expression for the residuals to be resampled: 00
Êq,t = Ut - 2: âq,kUt-k k=l
(A.7)
where âq,k denotes the parameters corresponding to the estimated MA(q) parameters
7rq,k. Then, adding and subtracting 2::~1 O:q,kUt-k, where the parameters 7rq,k were
defined in the proof of lemma 2.1, and using once more the AR(oo) form of (2.6),
equation (A.7) becomes: 00 00
Êq,t = éq,t - 2:(âq,k - O:q,k)Ut-k - 2:(O:q,k - Œk)Ut-k (A.8) k=l k=l
It then follows that
lêq,t - oq,tl" :S c (IE(iiq'k - I>q,k)Ut-{ + IE(l>q'k - iik)U,_{) for c=2r
-1 . Let us define
1 n 1 00 Ir C 2n = ;, 2: 2: (O:q,k - Œk )Ut-k
t=l k=l
then showing that nl-r/2Cln ~ 0 and nl-r/2C2n ~ 0 will give us our result. First,
let us note that C1n is majorized by:
( max lâq,k - O:q,klr
) ! t f= IUt_kir l::;k::;oo n t=l k=l
(A.9)
By lemma 2.1 and equation (20) of Park (2002), we have
max lâq k - O:q kl = 0 ((log n/n)1/2) a.s., 1::; k::; 00 ' ,
163

Thus, the first part of (A.9) goes to O. On the other hand, the second part is bounded
away from infinity by a law oflarge numbers and equation (25) in Park (2002). This
proves the first result. If we apply Minkowski's inequality to the absolute value part
of C2n , we obtain
E If (Œq,k - Œk) Ut_kir::; E IUtir (f IŒq,k - Œkl)r k=l k=l
(A.IO)
of which the right hand side goes to 0 by the boundedness of E IUtlr, the defini-
tion of the Ci, lemma 2.1 and equation (21) of Park (2002), where it is shown that
I:~=1 IŒp,k - Œkl = o(p-S) for some p -t 00, which implies a similar result between
the 1Tq,k and the 1Tk, which in turn implies a similar result between the Œq,k and the
Œk' This proves the result.
4 l-r/2D a.s. 0 .n n-t
In order to prove this, we show that
Recalling equations (A.4) and (A.8), this will be true if l n 00
- L L (Œk - Œk) Ut-k ~ 0 n t=l k=q+l
l n 00
- L L(Œq,k - Œk)Ut-k ~ 0 n t=l k=l 1 n 00
;; L L(âq,k - Œq,k)Ut-k ~ 0 t=l k=l
(A.ll)
(A.12)
(A.13)
where the first equation serves to prove the second asymptotic equality and the other
two serve to prove the first asymptotic equality. Proving those 3 results requires some
work. Just like Park (2002), p.485, let us define n
Sn (i, j) = L ét-i-j
t=l
164

and n
Tn(i) = L Ut-i t=l
so that 00
Tn(i) = L 7rjSn(i, j) j=O
and remark that by Doob's inequality,
where z = 1/(1- ~). Taking expectations and applying Burkholder's inequality,
where Cl is a constant depending only on r. By the law of large numbers, the right
hand side is equal to clz(na2y/2=clz(nT/2a T
). Thus, we have
uniformly over i and j, where C = clzaT• Define
00 00 n
Ln = L (Œk - ak) Tn(k) = L (Œk - ak) L Ut-k' k=q+l k=q+l t=l
It must therefore follow that
00
::; L I(Œk- ak)lcn l/
2
k=q+l
where the constant c is redefined accordingly. But
00
L I(Œk - ak)1 = o(q-S) k=q+l
by assumption 2.1 b and the construction of the ak, recall part 2 ofthe present proof.
Thus,
165

Then it follows from the result in Moriez (1976, theorem 6), that for any J > 0,
Ln = 0 (q-Sn1/ 2 (log n)l/r (log log n)(1+o)/r) = o(n) a.s.
this last equation proves (A.11).
Now, if we let
00 00 n
Mt = L (Œq,k - Œk) Tn(k) = L (Œq,k - Œk) L Ut-k, k=l k=l t=l
then, we find by the same devise that
[E (max IMmlr)] l/r ~ f: I(Œq k - Œk)1 [E (max ITm(k)lr)] l/r l<m<n ' l<m<n - - k=l - -
the right hand side of which is sm aller than or equal to cq-Sn 1/2, see the discussion
under equation (A.lO). Consequently, using Moricz's result once again, we have
Mn = o(n) a.s. and equation (A.12) is demonstrated. Finally, define
00 00 n
Nn = L(âq,k - Œq,k)Tn(k) = L(âq,k - Œq,k) L Ut-k k=l k=l t=l
further, let
Qn = f: If: Ut-kl· k=l t=l
Then, the larger element of Nn is Qn max1::;k::;00 lâq,k - Œq,kl. By assumption 2.1 b
and the result under (A.9), we know that the second part goes to o. Then, using
again Doob's and Burkholder's inequalities,
E [l~~~n IQmlr] ~ cqrnr/2.
Therefore, we can deduce that for any J > 0,
Qn = 0 (qn 1/ 2 (log n)l/r (log log n)(1+o)/r) a.s.
166

and
Nn = 0 ((log n/n)1/2) Qn = 0 (q (log n)(r+2)/2r (log log n)(1+8)/r) = o(n).
Renee, equation (A.13) is proved.
The proof of the lemma is complete. Consequently, the conditions required for theo-d*
rem 2.2 of Park (2002) are satisfied and we may conclu de that W~ -+ Wa.s .
•
Proof of Lemma 2.3.
We begin by noting that
Pr* [max In-1/
2il*1 > 8] < t Pr* [ln-1/
2il*1 > 8] l::;t:Sn t - t=l t
= nPr* [ln-1/
2il;1 > 8]
::; (l/8r)n1- r/2E* lil;l r
where the first inequality is trivial, the second equality follows from the invertibility of
il; conditional on the realization of {Êq,t} (which implies that the AR( 00) form of the
MA(q) sieve is stationary) and the last inequality is an application of the Tchebyshev
inequality. Recall that
il; = t (t irq,i) é;-k+l' k=l i=k
Then, by Minkowski's inequality and assumption 2.1, we have:
E* lil;l r ::; (t, k lirq,kl) r E* lé;l r
But by lemma 2.1, the estimates irq,i are consistent for 7fk. Renee, by assumption 2.1,
the first part must be bounded as n -+ 00. AIso, we have shown in lemma 2 that
nl-r/2E* lé;l r ~O. The result thus follows.
167

•
Proof of Theorem 2.1.
The result follows directly from combining lemmas 2.1 to 2.3. Note that, had we
proved lemmas 2.1 to 2.3 in probability, the result of theorem 2.1 would also be in
probability.
•
Proof of Corollary 2.1
The pro of of this corollary is a direct extension of the proof of lemma 2.1. l t suffices to
point out the fact that the êe,k can be written as functions of the ire,j and ô;e,j, which
can themselves be expressed as functions of the parameters of a long autoregression
in the context of the analytical indirect inference estimation method of GZW (1997).
We know, by lemma 3.1 of Park (2002), that the estimated parameters of this long
autoregression are consistent estimators of the parameters of the AR( 00) form of Ut.
By the same arguments that were used in the proof of lemma 2.1, we can therefore
conclude that ire,j and Ô;e,j are consistent estimators of the true parameters of the
ARMA form of Ut, which in turn implies that the êe,k are consistent.
•
Proof of corollary 2.2.
Recall that C = p + q and assume that C ---+ 00 at the rate specified in assumption 2.3.
Then, for any value of p E [0,00) and q ---+ 00, the stated result follows from lemma
2.2 and corollary 2.1. To see this, define Vt as being the original process Ut with an
AR(p) part filtered out using the p consistent parameter estimates. Then, Vt is an
invertible generallinear pro cess to which we can apply lemma 2.2.
168
By the same logic, letting q E [0,00) and p --> 00, and defining Vt as being the original
pro cess with the MA(q) part filtered out, it is easily seen that the result of lemma 3.2
in Park (2002) can be applied. Since these two situations allow us to han die every
possible cases, the result is shown.
Equivalently, we could have reached the same conclusion by using the AR( 00) form
of the ARMASB rather than that of the MASB in the proof of lemma 2.2.
•
Proof of corollary 2.3
Identical to corollary 2.2 except that we use lemma 2.3 for the case where q --> 00
and the pro of of theorem 3.3 in Park (2002) for the case where p --> 00.
•
Proof of Theorem 2.2.
The result follows directly from combining corollaries 2.1 to 2.3. Note that, had
we proved corollaries 2.1 to 2.3 in probability, the result of theorem 2.2 would also be
in probability.
•
Lemma Al.
Under assumptions 2.1 and 2.2, et = é;, where et is the error term from the bootstrap
ADF regression and é; is the bootstrap error term.
169

Proof of Lemma Al.
Let us first rewrite the ADF regression (2.21) under the nuU as foUows:
p ( k+q ) !::::"y; = L ap,k L 1rq,j-kC;_j + C;_k + et
k=l j=k+l
where we have substituted the MASB DGP for !::::,.yt-k' This can be rewritten as
p q
!::::"y; = L L a p,i1rq,jC;_i_j + et· (A.14) i=l j=O
where 1rO,j is constrained to be equal to 1 as usuaI. Then, from equations (A.14) and
(2.7), q p q
"" A * * "" "" A * et = L...J 7rq,jCt_j + Ct - L...J L...J a p,i7rq,jCt_i_j' j=l i=lj=O
Let us rewrite this result as foUows:
where
A (A ) * (A A ) * (A A ) * t = 7rq,l - al Ct-l + 7rq,2 - a p,l7rq,l - a p ,2 Ct-2 + ... + 7rq,q - a p,l7rq,q-l - ... - ap,q Ct-q
and
Et = ~ C;_j (t 1rq,iap,j-i) j=q+l i=O
where 1ro = 1 and ap,i = 0 whenever i > p. First, we note that the coefficients
appearing in At are the formulas linking the parameters of an AR(p) regression to
those of a MA(q) proeess (see Galbraith and Zinde-Walsh, 1994). Renee, no matter
how the 1rq,j are estimated, these coefficients aU equal to zero asymptotically under
assumption 2.2. Sinee we assume that q -t 00, we may conclude that At -t0. Further,
by lemma 2.1 and lemma 3.1 of Park (2002), this convergenee is almost sure.
On the other hand, taking Et and applying Minkowski's inequality to it:
170

But for each j, '5:.{=o 1f q,iCXp,j-i is equal to -CXp,j, the jth parameter of the approximating
autoregression (see Galbraith and Zinde-Walsh, 1994). Hence, we can write:
by lemma 2.1. But, as p and q go to infinity with p > q, '5:.~~~+I(lcxjlY = o(q-rs) a.s.
under assumption 2.1.
For the ARMASB, the DGP is
p q A * ",",A A * ",",A * * uYt = L... CXp,juYt_j + L... 1fq,j Et_j + Et
j=l j=l
so that the bootstrap ADF regression can be written as follows
thus,
p q C q C p
et = L Œp,jllYt- j + L 7rq,jE;_j - L L "'Ic,i7rq,jE;_i_j - L L "'Ic,iŒp,jllYt-i-j + E;' j=l j=l i=l j=O i=l j=O
By calculation similar to those used above, we have:
where
and
where
C
At = L 1/Jj llY;_j j=l
1/JI = 7rq,l + Œp,l - "'IC,1
171

or, more generally,
min(j,q)
'!/Jj = - L 7ri,q'"'lj-i + âp,j - '"'Ie,j for j::; p i=l
min(j,q)
'!/Jj = - L 7ri,q'"'lj-i - '"'Ie,j for j > p. i=l
where '"'Ik denotes the true value of the AR( 00) form of lly;. These are just the analyti
cal indirect inference binding functions linking the parameters of a long autoregressive
approximation to those of an ARMA(p,q) model. Because the analytical indirect in
ference estimator is consistent, At goes to 0 asymptotically under assumption 3.2.
Now, applying Minkowsky's inequality to Et yields:
E* IBtl' <:: E* 1 LlY;I' (~1 ~ 1",,;'Yi-il) ,
where we have used the fact that the bootstrap DGP is stationary. For each j,
Ef=l7rq,j'"'lj-i is equal to '"'Ij, the jth parameter in the AR( 00) form of lly; which in
turn is a consistent estimate of '"'IJ, the lh parameter of the AR( 00) form of llYt.
Thus,
E* IBtl' <:: E* ILlytl' C~llÎ'JI)' a.s.
The right hand si de evidently goes to 0 by assumption 2.1. this concludes the proof .
•
Lemma A2 (CP lemma Al).
Under assumptions 2.1 and 3.2', we have (J; ~ (J2 and r~ ~ ra as n ---7 00 where
E*Ié';1 2 = (J; and E*lu;1 2 = r~
Proof of Lemma A2.
Consider the MASB DGP (2.7) once more:
(A.15)
172

Vnder assumption 2.1 and given lemma 2.1, this pro cess admits an AR(oo) represen
tation. Let this be: 00
u; + L ~q,kU;-k = é; (A.16) k=l
where we write the 'l/Jq,k parameters with a hat and a subscript q to emphasize that
they come from the estimation of a finite or der MA(q) model. We can rewrite equation
(A.16) as follows: 00
* """" .Î. * * Ut = - ~ 'Pq,kUt-k + Ct· (A.17) k=l
Multiplying by u; and taking expectations under the bootstrap DGP, we obtain 00
r~ = - L ~q,krz + 0";. k=l
dividing both sides by r~ and rearranging, 2
r * _ 0"* o - A
1 + L:~1 'l/Jq,kPk
(A.18)
where Pk are the auto correlations of the bootstrap process. Note that these are
functions of the parameters ~q,k and that it can easily be shown that they satisfy the
homogeneous system of linear differential equations described as: 00
P~ + L ~q,kPLk = 0 k=l
for aIl h > O. Thus, the auto correlations Ph are implicitly defined as functions of the
~q,k. On the other hand, let us now consider the model: q
Ut = L irq,kÊq,t-k + Êq,t (A.19) k=l
which is simply the result of the computation of the parameters estimates irq,k' This,
of course, also has an AR( 00) representation: 00
Ut = - L ~q,kUt-k + Êq,t. k=l
where the parameters ~q,k are exactly the same as in equation (A.17). Applying the
same steps to this new expression, we obtain:
(A.20)
173

where fo,n, is the sample autocovariance of Ut when we have n observations, â~ =
(lin) L:r=l €; and Pk,n is the kth autocorrelation of Ut. Since the auto correlation
parameters are the same in equations (A.18) and (A.20), we can write:
The strong law of large numbers implies that f On ~ fo. Therefore, we only need to
show that (y';jâ~ ~. 1 to obtain the second result (that is, to show that fô ~ fo).
By the consistency results in lemma 2.1, we have that â~ ~ a 2 . AIso, recall that the
é; are drawn from the EDF of (€q,t - (lin) L:~=l €q,t). Therefore,
a2 = .!. ~ (€ t _ .!. ~ € t) 2 * n L..- q, n L..- q, t=l t=l
By the independence of the é;, It follows that:
(ln )2 2 A2 "'A
a* = an + - L..-éq,t n t=l
(A.21)
But we have shown in lemma 2 that ((lin) L:~=l €q,t)2 = 0(1) a.s. (to see this, take
the result for nl-r/2 Dn with r = 2). Therefore, we have that a; ~ â~, and thus,
a;lâ~ ~l. It therefore follows that fô ~ fo. On the other hand, a; ~ â; implies 2 a.s. 2
a* -t a .
It is fairly obvious that the results of this lemma can be extended to the ARMASB
case. To do this, it suffices to replace equations (A.15) and (A.19) by the ARMASB
DGP and the ARMA estimating equation and to use the corollaries to lemmas 2.1
and 2.2 .
•
Lemma A3 (CP lemma A2, Berk, theorem 1, p. 493)
Let 1 and f* be the spectral densities of Ut and u; respectively. Then, under assump
tions 2.1 and 3.2',
sup 1/*(.\) - 1(.\)1 = 0(1) a.s. À
174

for large n. Also, letting f k and ft be the autocovariance functions of Ut and u~
respectively, we have 00 00
L fZ = L f k + 0(1) a.s. k=-oo k=-oo
for large n. Notice that the result of CP (2003) and ours are almost sure whereas
Berk's is only in probability.
Proof of Lemma A3.
Let us first derive the result for the MASB. The spectral density of the bootstrap
data is
Further, let us define
Recall that 1 n [ 1 n ]2
0'2 = - '" Ê t - - '" Ê t * n ~ q, n ~ q, t=l t=l
From lemma 2.2 (proof of the 4th part) and lemma A2 (equation A.21), we have
Thus,
Therefore, the desired result follows if we show that
Now, denote by fn(>\) the spectral density function evaluated at the pseudo-true
parameters introduced in the proof of lemma 2.1:
175

where a; is the minimum value of
and a~ -t a2 as shown in Baxter (1962). Obviously,
sup 11(À) - ln(À)1 = 0(1) a.s. À
by lemma 2.1 and equation (20) of Park (2002). AIso,
sup 11n(À) - I(À)1 = 0(1) a.s. À
where
I(À) = a2
1 + t 7rkeikÀl2 27r k=l
by the same argument we used at the end of part 3 of the proof of lemma 2.2. The
first part of the present lemma therefore follows. If we consider that
00 00
L rk = 27r 1(0) and L rz = 27r j*(0) -00 -00
the second part follows directly.
For the ARMASB, the spectral density is
l'p.) ~ ~; Il + ~ êe,keik>l' where ÔP,k is the gth parameter of the MA( (0) form of the ARMASB DGP. Since
lemmas 2.1, 2.2 and A2 also hold for the ARMASB, the proof follows the same line
as that of the MASB and we therefore do not write it down. More specifically, it is
easy to see that the result nl-r/2 Dn ~ 0 in part four of lemma 2.2, which is of crucial
importance here, holds if we replace the parameters of the AR( (0) form of the MASB
by those corresponding to the AR(oo) form of the ARMASB .
•
176

Lemma A4 Under assumptions 2.1 and 2.2, we have
Proof of Lemma A4.
From the proof of lemma 2.2, we have E* lé;1 4 :::; c (An + Bn + Cn + Dn) where c is a
constant. The relevant results are:
1. An = 0(1) a.s.
2. E(Bn) = o(q-rs) (equation A.3)
3. Cn :::; 2r- I(CIn + C2n )
where CIn = 0(1) a.s. (equation above A.10)
and E(C2n ) = o(q-rs) (equation A.10)
4. Dn = 0(1) a.s.
Under assumption 2.2', we have that En = 0(1) a.s. and C2n = 0(1) a.s. because
o(q-rs) = o((cnk)-rs) = o(n-krs ) = o(n- I- O) for cS > O. The result therefore follows
for both the MASB and the ARMASB .
•
Lemma A5 (CP lemma A4, Berk proof of lemma 3)
Define
M~(i,j) = E* [t (U;_iU;_j) - r:_ j ]
2
t=1
Then, under assumptions 2.1 and 2.2, we have M~(i,j) = O(n) a.s.
177

Proof of Lemma A5.
For generallinear models, Hannan (1960, p. 39) and Berk (1974, p. 491) have shown
that
M; ci, j) ~ n [2 Joo f' + IKrl C~ ii-~,k )'] for an i and j and where Kr is the fourth cumulant of ê;. Since our MASB and
ARMASB certainly fit into the class of linear models, this result applies here. But
Kr can be written as a polynomial of degree 4 in the first 4 moments of ê;. Therefore,
IKrl must be 0(1) a.s. by lemma A4. The result now follows from lemma A3 and
the fact that L:k=-oo r k = O(n) .
•
Before going on, it is appropriate to note that the proofs of lemmas 2.4 and 2.5 are
almost identical to the proofs of lemma 3.2 and 3.3 of CP (2003). We present them
here for the sake of completeness.
Proof of Lemma 2.4.
First, we prove equation (2.22). Using the Beveridge-Nelson decomposition of u; and
the fact that Yt = L:~=l uk' we can write:
1 ~ * * A (1) 1 ~ * * _* 1 ~ * 1 ~ _* * - ~ Ytêt = 7fn - ~ Wt-1êt + uo- ~ ê t - - ~ Ut-lêt · n t=l n t=l n t=l n t=l
Therefore, to prove the first result, it suffices to show that
E* [-* 1 ~ * 1 ~ -* *] (1) uo- ~êt - - ~ Ut-lêt = 0 a.s. n t=l n t=l
(A.22)
Since the é; are iid by construction, we have:
E* (t é;) 2
= nO"; = O(n) a.s t=l
(A.23)
178

and
E* (fÜ;_lC;)2 = na;r~ = O(n) a.s t=l
(A.24)
where rü=E*(ü;)2. But the terms in equation (A.22) are ~ times the square root of
(A.23) and (A.24). Henee, equation (A.22) follows. Now, to prove equation (2.23),
recall that w; = L::~=l ck and consider again from the Beveridge-Nelson decomposition
of ur:
thus, rb- L::~=l y;2 is equal to
By lemma 2.3, every term but the first of this expression is 0(1) a.s. The result
follows .
•
Proof of Lemma 3.5.
Using the definition of bootstrap stochastic orders, we prove the results by showing
that:
E* (~~ X;,tX;/ r = Op(l)
E* II~X;,tY:-lll = Op(npl/2) a.s.
E* II~ X;,tC;11 = Op(nl/2pl/2) a.s.
(A.25)
(A.26)
(A.27)
The proofs below rely on the fact that, under the null, the ADF regression is a finite
or der autoregressive approximation to the bootstrap DGP, which admits an AR( 00)
form.
179

Pro of of (A.25): First, let us define the long run covariance of the vector X;,t as
n;p = (r:_j )f,j=l. Then, recalling the result of lemma A5, we have that
E* II~ ~X;,tX;/ -11;,f ~ Op(n-lp2) a.s. (A.28)
This is because equation (A.28) is squared with a factor of lin and the dimension of
X;,t is p. Also,
(A.29)
because, under lemma A4, we can apply the result from Berk (1974, equation 2.14).
In that paper, Berk considers the problem of approximating a generallinear process,
of which our bootstrap DGP can be seen as being a special case, with a finite or der
AR(p) model, which is what our ADF regression does under the null hypothesis. To
see how his results apply, consider assumption 2.1 (b) on the parameters of the original
data's DGP. Using this and the results oflemma 2.1, we may say that 2:~o !*q,k! < 00.
Therefore, as argued by Berk (1974, p. 493), the polynomial 1 + 2:%=1 irq,keik). is con
tinuous and nonzero over À so that f* (À) is also continuous and there are constant
values FI and F2 such that 0 < FI < f*(À) < F2 . This further implies that (Grenan
der and Szego 1958, p. 64) 21fFl ~ Àl < ... < Àk ~ 21fF2 where Ài' i=l, ... ,p are the
eigenvalues of the theoretical covariance matrix of the bootstrap DGP. To get the
result, it suffices to consider the definition of the matrix norm. For a given matrix
C, we have that IICII=sup IICxll for IIxll ~ 1 where x is a vector and IIxII 2 = x T x.
Thus, IICII 2 ~ 2:i,j Cr,j' where Ci,j is the element in position (i,j) in C. Therefore, the
matrix norm IICII is dominated by the largest modulus of the eigenvalues of C. This
in turn implies that the norm of the inverse of C is dominated by the inverse of the
smallest modulus of the eigenvalues of C. Hence, equation (A.29) follows.
Then, we write the following inequality:
180

E* II~ t,x;"x;/ -lin;. -1111 S E* (~t,x;"x;/ f -n;'-l
where we used the fact that E* Iln;pll = Iln;pll. By equation (A.28), the right hand
side goes to 0 as n increases. Equation (A.25) then follows from equation (A.29).
Pro of of (A.26): Our proof is almost exactly the same as the proof of lemma 3.2 in
Chang and Park (2002), except that we consider bootstrap quantities. As them, we
let Yt = 0 for all t ::; 0 and, for 1 ::; j ::; p, we write
n n
'""' * * '""' * * R* ~ Yt-IUt-j = ~ Yt-IUt + n (A.30) t=l t=l
where n n
R* '""' * * '""' * * n = ~ Yt-IUt-j - ~ Yt-IUt t=l t=l
where ut is the bootstrap first difference process. First of aH, we note that L:~=l X;,tyt-l
is a 1 xp vector whose lh element is L:~=l Yt-IUt-j. Therefore, by the definition ofthe
Eucledian vector norm, equation (A.26) will be proved if we show that R~ = O;(n)
uniformly in j for j from 1 to p. We begin by noting that
n n n '""' y* u* - '""' y* u* - '""' y* u* ~ t-l t - ~ t-j-l t-j ~ t-l t t=l t=l t=n-j+l
for each j. This allows us to write:
n n
R* = '""'(y* - y*. )u*. - '""' y* u* n ~ t-l t-J-I t-J ~ t-l t· t=l t=n-j+l
Let us call R~n and R"2n the first and second elements of the right hand si de of this
last equation. Then, because yt is integrated,
R* - ~ (* - * ) U* ln - ~ Yt-l Yt-j-l t-j t=l
181

By lemma A3, the first part is O(n) a.s. because I:~oo r k = 0(1). Similarly, we can
use lemma A5 to show that the second part is 0;(nl/2p) a.s., where the change to
0; cornes from the fact that the result of lemma A5 is for the expectation under the
bootstrap DGP, the nl/2 from the fact that lemma A5 considers the square of the
present term and p from the fact that j goes from 1 to p. Thus, Rrn = 0 (n) +0; (n 1/2p )
a.s.
Now, let us consider R~n: n
R* "Ç'" * * 2n = L..J Yt-l Ut t=n-j+l
t~t;+l (~U;_i) ~ n n-j n t-l L L U;U;_i + L L U;U;_i
t=n-j+l i=l i=n-j+2t=n-j+l
Letting R~n a and R~n b denote the first and second part of this last equation, we have
(n-j) n [n-j 1
R;n a = j L r~ + L L (U;U;_i - r:) i=l t=n-j+l i=l
uniformly in j, where the last line cornes from lemmas A3 and A5 again. The order
of the first term is obvious while the order of the second term is explained like that
of the second term of Rrn' Similarly, we also have
t-l n [t-l 1 R;n
b = (j - 1) L: ri + L: L: (U;U;_i - r:)
n-j+l t=n-j+2 i=n-j+l
= O(p) + Op(p3/2) a.s.
uniformly in j under lemmas A3 and A5 and where the order of the first term is
obvious and the order of the second term cornes from the fact that j appears in the
182

starting index of both summand. Renee, R~ is O;(n) a.s. uniformly in j. AIso, under
assumptions 2.1 and 2.2, and by lemma 2.1, L:~=l yt-lU; = O;(n) a.s. uniformly in j.
Therefore, equation (A.3D) is also O;(n) a.s. uniformly in j, 1 :::; j :::; p. The result
foUows beeause the left hand si de of (A.26) is the Euclidian veetor norm of p elements
that are aU O;(n) a.s.
Proof of (A.27): We begin by noting that for aU k sueh that 1:::; k :::; p,
E* (~u* c*) 2 = na2r* L..,; t-kCt * 0 t=l
which means that
E* II~X;,t€;112 = np(T;r~ But it has been show in lemma A2 that a; and r~ are 0(1) a.s. The result is then
obvious.
•
Proof of Theorem 2.3.
The theorem foUows direetly from lemmas 2.4 and 2.5.
•
Proof of Corollary 2.4.
The results are easily obtained by using the Beveridge-Nelson decomposition of the
infinite MA form of the ARMASB DGP and by foUowing the same li ne of reasoning
as in lemma 2.4.
•
Proof of corollary 2.5.
The proof of lemma 2.5 can easily be adapted to the ARMASB sinee lemmas 2.1,2.2
183

and Al to A5 have been shown to hold for this case. Hence, corollary 2.5 naturally
follows .
•
Proof of Theorem 2.4
The pro of follows directly from corollaries 2.4 and 2.5 .
•
We now provide a heuristic proof of the consistency of the GLS corrected estima
tor. Let us denote by âl,k, â2,k, ... , âk,k the k parameter estimates we obtain by
approximating the autoregression given in observations 4.1 or 4.2 with a k-order au
toregression. Define as â(k) = (âl,kJ ... , âk,k) T the vector of these estimates. AIso,
define the vector Xj(k) = (Vj, ... , Vj-HI) T and let
R(k) = ro
where the ri come from the vector
n-l
f(k) = L X j vj+1/(n - k) j=k
and are therefore covariance estimators. Evidently, â(k) = R(k)-lf(k). Next, denote
by al,k, a2,k, ... , ak,k the pseudo-true parameters that minimize
and let the minimized value be a~. Further, let r(k) = (rl, ... ,rk)T and R(k) be
184

the pseudo-true equivalent of r(k) and R(k) respectively. Then, we can state the
following theorem:
Theorem 1, Berk, equation 2.17, p. 493.)
Under the assumptions specified above and letting k = o(nl/3 ),
Ilâ(k) - a(k) Il ~ o.
Proof.
In our notation, equation 2,8 of Berk becomes:
n-l
a(k) - â(k) = R(k)-l I: Xj(k)Cj+l,k/(n - k) j=k
where Cj+l,k = vj+l-alVj- ... -akVj-k+l' Then, adding and subtracting R(k)-l 2:.j;;;.1 Xj(k)
Cj+l,k/(n - k) and R(k)-l 2:.j;;;.1 Xj(k)cj+l/ (n - k) to the right hand side of this equa-
tion and using a triangle inequality yields:
n-l
Ilâ(k) - a(k)11 ::; IIR(k)-l - R(k)11 I: Xj(k)Cj+l,k/(n - k) j=k
(A.31)
n-l n-l
+ IIR(k)-lll I: Xj(k) (Cj+l,k - Cj+l) /(n - k) + IIR(k)-lll I: Xj(k)cj+l/(n - k) j=k j=k
which is equation (2.17, p. 493) in Berk. Under the assumption that k = o(n1/3 ), Berk
shows that R(k)-l is bounded (equation 2.14, p. 493), and that kl/21IR(k)-1 - R(k)11
goes to 0 in probability (lemma 3, p. 493). He also shows that EII2:.j;;;.1 Xj(k)cj+l/(n - k)r
is finite and that
n-l
E I: Xj(k) (Cj+l,k - Cj+l) /(n - k) ::; K,k (a~+l + a~+2 + ... ) j=k
185

where '" is a constant. Thus, the convergence of â( k) depends on whether k (a~+1 + a~+2 + ... ) goes to O. This is obviously the case here because the bias terms on the original esti-
mates vanish asymptotically .
•
186