shape & image analogies - tel aviv...
TRANSCRIPT

1
Image and Shape Analogies
The transfer of color and motion
Presented by: Lior Shapira, PhD student
Lecture overviewThe beginningThe middleA few picturesSome more middleThe end
Analogies“An analogy is a comparison between
two different things, in order to highlight some form of similarity. “
Find the analogies!
2
Find the analogies!Find the analogies!
Find the analogies!Find the analogies!

3
Find the analogies!Find the analogies!
Image Color Transfer
What’s our purpose?Transfer the colors of one image to another
Analyze imagesFind correspondence (which color goes where?)Perform a smooth transfer of the colors

4
Finding a model for the dataWorking in geometric coordinates
The RGB DomainA regular image
The RGB DomainImage pixels in RGB space
The RGB DomainImage pixels in RGB space

5
ClusteringTo find analogies we’ll attempt to find correspondences between clusters in the dataClustering of data is a method by which large sets of data is grouped together into clusters of smaller sets of similar data
K-meansA very simple way to cluster data
{ }( )
,
5 2,
1 1,arg min
j i j
n
i j i jj iC m
m x C= =
−∑∑
,
5
,1
1 the j-th cluster0 the j-th cluster
1
any a single cluster
ii j
i
i jj
i
xm
x
m
x=
∈⎧= ⎨ ∉⎩
=
→ ∈
∑
K-means for Clustering
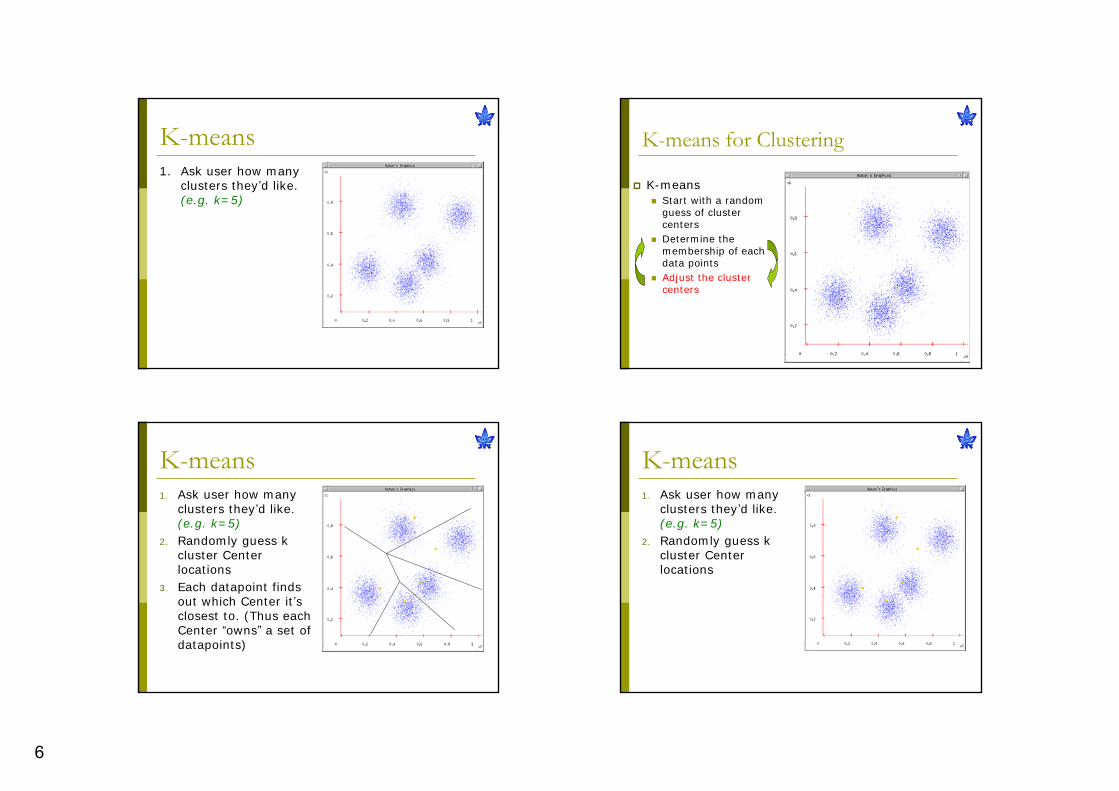
K-meansStart with a random guess of cluster centersDetermine the membership of each data pointsAdjust the cluster centers
K-means for Clustering
K-meansStart with a random guess of cluster centersDetermine the membership of each data pointsAdjust the cluster centers
6
K-means for Clustering
K-meansStart with a random guess of cluster centersDetermine the membership of each data pointsAdjust the cluster centers
K-means1. Ask user how many
clusters they’d like. (e.g. k=5)
K-means1. Ask user how many
clusters they’d like. (e.g. k=5)
2. Randomly guess k cluster Center locations
K-means1. Ask user how many
clusters they’d like. (e.g. k=5)
2. Randomly guess k cluster Center locations
3. Each datapoint finds out which Center it’s closest to. (Thus each Center “owns” a set of datapoints)

7
K-means1. Ask user how many
clusters they’d like. (e.g. k=5)
2. Randomly guess k cluster Center locations
3. Each datapoint finds out which Center it’s closest to.
4. Each Center finds the centroid of the points it owns
K-means1. Ask user how many
clusters they’d like. (e.g. k=5)
2. Randomly guess k cluster Center locations
3. Each datapoint finds out which Center it’s closest to.
4. Each Center finds the centroid of the points it owns
Limitations of K-meansUser inputs number of clustersSensitive to initial guessesConverges to local minimumProblematic with clusters of
Differing sizesDiffering densitiesNon globular shapes
Difficulty with outliers
GaussiansNormal distribution (1D)
( )2
2
1( , ) exp22
xf x
µµ σ
σσ π
⎛ ⎞−= −⎜ ⎟
⎜ ⎟⎝ ⎠

8
Gaussians2D Gaussians
d = 2x = random data point (2D vector)= mean value (2D vector)= covariance matrix (2D matrix)
( )( ) ( )11( , ) exp
22 det( )
T
d
x xf x
µ µµ
π
−⎛ ⎞− Σ −Σ = −⎜ ⎟
⎜ ⎟Σ ⎝ ⎠
Σµ
The same equation holds for a 3D Gaussian
Gaussians
( )( ) ( )11( , ) exp
22 det( )
T
d
x xf x
µ µµ
π
−⎛ ⎞− Σ −Σ = −⎜ ⎟
⎜ ⎟Σ ⎝ ⎠
µ
Σ
Exploring Covariance Matrix
( ) ( )2
21
( , )
cov( , )1cov( , )
i i i
NT w
i ii h
x random vector w h
w hx x
N h wσ
µ µσ=
=
⎛ ⎞Σ = − − = ⎜ ⎟
⎝ ⎠∑
is symmetrichas eigendecomposition (svd)
Σ⇒ Σ * * TV D VΣ =
Σ
1 2 ... dλ λ λ≥ ≥ ≥
Covariance Matrix Geometry
Σ
1
2
* *
1*
2*
TV D V
a v
b v
λ
λ
Σ =
=
=
b
a

9
3D Gaussians
( )( )
2
2
1 2
( , , )
cov( , ) cov( , )1 cov( , ) cov( , )
cov( , ) cov( , )
i
rNT
i i gi
b
x r g b
g r b rx x r g b g
Nr b g b
σµ µ σ
σ=
=
⎛ ⎞⎜ ⎟
Σ = − − = ⎜ ⎟⎜ ⎟⎝ ⎠
∑
GMMs – Gaussian Mixture Model
W
H
Suppose we have 1000 data points in 2D space (w,h)
W
H
GMMs – Gaussian Mixture ModelAssume each data point is normally distributedObviously, there are 5 sets of underlying gaussians
The GMM assumptionThere are K components (Gaussians)Each k is specified with three parameters: weight, mean, covariance matrixThe total density function is:
( )( ) ( )1
1
1
1
1( ) exp22 det( )
{ , , }
0 1
TK
j j jj d
jj
Kj j j j
K
j jj
x xf x
weight j
µ µα
π
α µ
α α α
−
=
=
=
⎛ ⎞− Σ −⎜ ⎟Θ = −⎜ ⎟Σ ⎝ ⎠
Θ = Σ
= ≥ ∀ =
∑
∑

10
The EM algorithm (Dempster, Laird and Rubin, 1977)
Raw data GMMs (K = 6) Total Density Function
iΣiµ
EM BasicsObjective:Given N data points, find maximum likelihood estimation of :
Algorithm:1. Guess initial2. Perform E step (expectation)
Based on , associate each data point with specific gaussian
3. Perform M step (maximization)Based on data points clustering, maximize
4. Repeat 2-3 until convergence (~tens iterations)
Θ
1arg max ( ,..., )Nf x xΘ
Θ = Θ
Θ
Θ
Θ
EM DetailsE-Step (estimate probability that point t associated to gaussian j):
M-Step (estimate new parameters):
,
1
( , )1,..., 1,...,
( , )j t j j
t j Ki t i ii
f xw j K t N
f x
α µ
α µ=
Σ= = =
Σ∑
,1
,1
,1
,1
,1
1
( )( )
Nnewj t j
tN
t j tnew tj N
t jtN new new T
t j t j t jnew tj N
t jt
wN
w x
w
w x x
w
α
µ
µ µ
=
=
=
=
=
=
=
− −Σ =
∑
∑∑∑
∑
EM Example
Gaussian j
data point t
blue: wt,j

11
EM ExampleEM Example
EM ExampleEM Example

12
EM ExampleEM Example
EM ExampleApplying EM on RGB spaceSuppose we cluster the points for 2 clusters
13
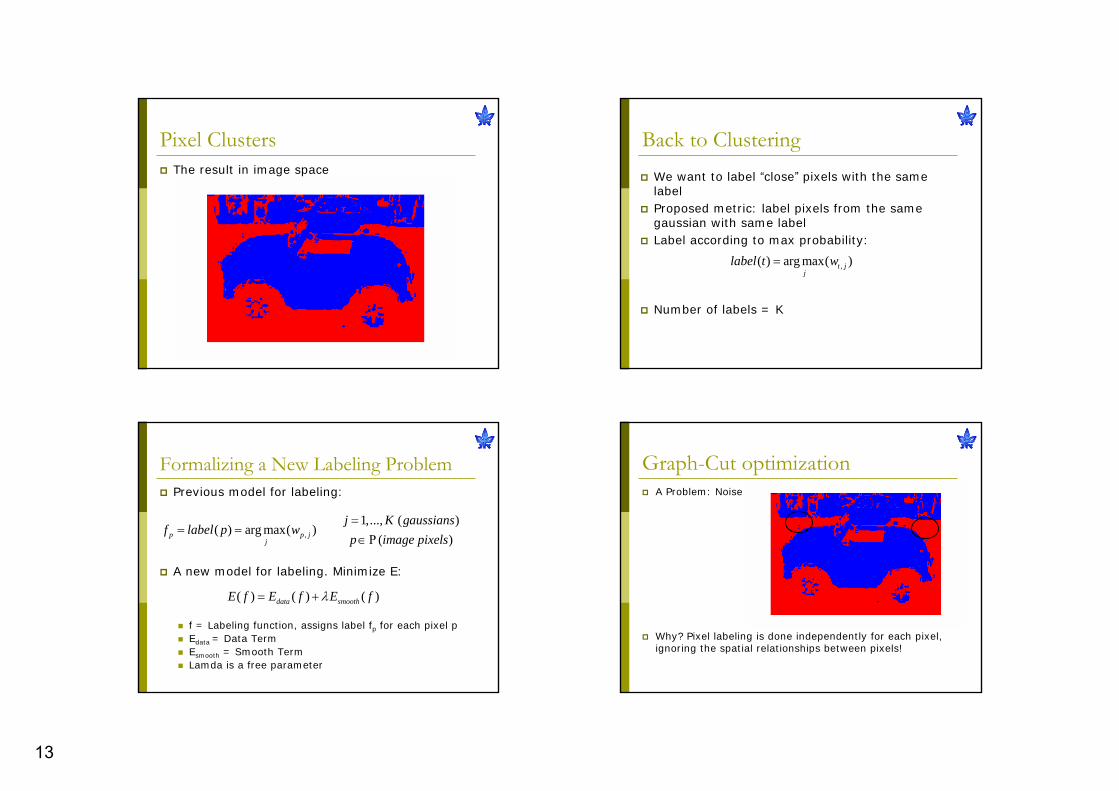
Back to ClusteringWe want to label “close” pixels with the same labelProposed metric: label pixels from the same gaussian with same labelLabel according to max probability:
Number of labels = K
,( ) arg max( )t jj
label t w=
Pixel ClustersThe result in image space
A Problem: Noise
Why? Pixel labeling is done independently for each pixel, ignoring the spatial relationships between pixels!
Graph-Cut optimizationPrevious model for labeling:
A new model for labeling. Minimize E:
f = Labeling function, assigns label fp for each pixel pEdata = Data TermEsmooth = Smooth TermLamda is a free parameter
Formalizing a New Labeling Problem
,
1,..., ( )( ) arg max( )
( )p p jj
j K gaussiansf label p w
p image pixels=
= =∈Ρ
( ) ( ) ( )data smoothE f E f E fλ= +

14
Labels Set: { j=1,…,K }Edata:
Penalize disagreement between pixel and the GMM
Esmooth:Penalize disagreement between two pixels, unless it’s a natural edge in the image
dist(p,q) = normalized color-distance between p,q
The Energy Function
,( ) ( ) 1pp p p p p f
p PixelsD f D f w
∈
= −∑
, ,,
0( , ) ( , )
1 ( , )p q
p q p q p q p qp q
neighbors
f fV f f V f f
dist p q ow=⎧
= ⎨ −⎩∑
( ) ( ) ( )data smoothE f E f E fλ= +
Solving Min(E) is NP-hardIt is possible to approximate the solution using iterative methodsGraph-Cuts based methods approximate the global solution (up to constant factor) in polynomial time
Minimizing the Energy
When using iterative methods, each iteration some of the pixels change their labeling
Given a label α, a move from partition P (labeling f) to a new partition P’ (labeling f’) is called an α-expansion move if:
α-expansion moves
Current Labeling
One Pixel Move
α-β-swapMove
α-expansionMove
' 'l lP P P P lα α α⊂ ∧ ⊂ ∀ ≠
Algorithm for Minimizing E(f)1. Start with an arbitrary labeling2. Set success = 03. For each label j
3.1 Find f’ = argmin(E(f’)) among f’ within one α-expansion of f
3.2 If E(f’) < E(f), set f = f’ and success = 1
4. If (success == 1) Goto 25. Return f
How to find argmin(E(f’)) ?
15
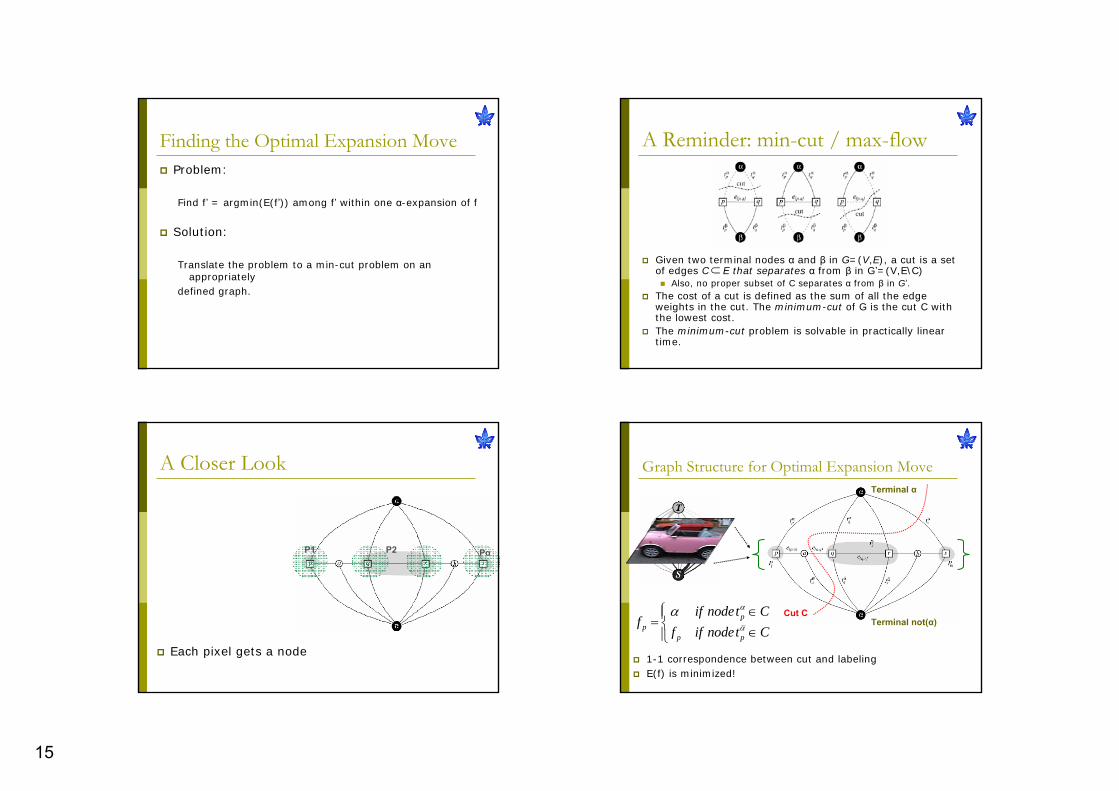
A Reminder: min-cut / max-flow
Given two terminal nodes α and β in G=(V,E), a cut is a set of edges C E that separates α from β in G’=(V,E\C)
Also, no proper subset of C separates α from β in G’.The cost of a cut is defined as the sum of all the edge weights in the cut. The minimum-cut of G is the cut C with the lowest cost.The minimum-cut problem is solvable in practically linear time.
⊂
Finding the Optimal Expansion MoveProblem:
Find f’ = argmin(E(f’)) among f’ within one α-expansion of f
Solution:
Translate the problem to a min-cut problem on an appropriately
defined graph.
Graph Structure for Optimal Expansion Move
pp
p p
if nodet Cf
f if nodet C
α
α
α⎧ ∈⎪= ⎨ ∈⎪⎩
Terminal α
Terminal not(α)Cut C
1-1 correspondence between cut and labelingE(f) is minimized!
Each pixel gets a node
A Closer Look
P1 P2 Pα

16
Add auxiliary nodes between pixel with different labels
A Closer Look
P1 P2 Pα
Add two terminal nodes for α and not(α)
A Closer Look
P1 P2 Pα
A Closer Look
P1 P2 Pα
A Closer Look
P1 P2 Pα

17
A Closer Look
P1 P2 Pα
A Closer Look
P1 P2 Pα
A Closer Look
P1 P2 Pα
New labeling results

18
Cluster matchingOnce we cluster and label the pixels in each picture we can match between them
Some results
source
reference
result
Color transfer between images/Reinhard, Ashikmin, Gooch & Shirley
Some results
source reference target
Some results
SourceReference
Labeling Labeling

19
Shape Analogies
Analogies in the 3D world
Analogies in the 3D worldThe dominant 3D object representation – Triangular meshes
Geometry
Connectivity
1
2
3
(1.56, 2.76, 3)
(0.17, 2.06, 1.5)
(3.1, 2, 2.22)
(x, y, z)
Analogies in the 3D worldWhat can ‘analogies’ mean in 3D?
Shape MatchingGlobal Registration Complete CorrespondencePart Correspondence

20
Shape matchingGiven a database of 3D models, and a query model, retrieve all similar objects
Global RegistrationGiven two 3D models, find the best matching alignment between them
Complete CorrespondenceFind for each triangle in the first model, a corresponding triangle in the second model.
Complete CorrespondenceSample application – deformation transfer
Deformation transfer for triangle meshes / Sumner, Popovic’. SIGGRAPH 2004

21
Part CorrespondenceAttempt to ‘think’ like a human, match logical parts
Body BodyTail TailLeg Leg…
Feature SpaceWe’re looking for a way to find analogies between 3D models3D triangular meshes are surface representations of volumetric objectsA strong link between surface and volume is the Medial Axis Transform(MAT)
Medial Axis Transform (MAT)
We grow circles within the given shape, until we are blocked by the shape’s boundaries. The collected center of these circles is the medial axis transform
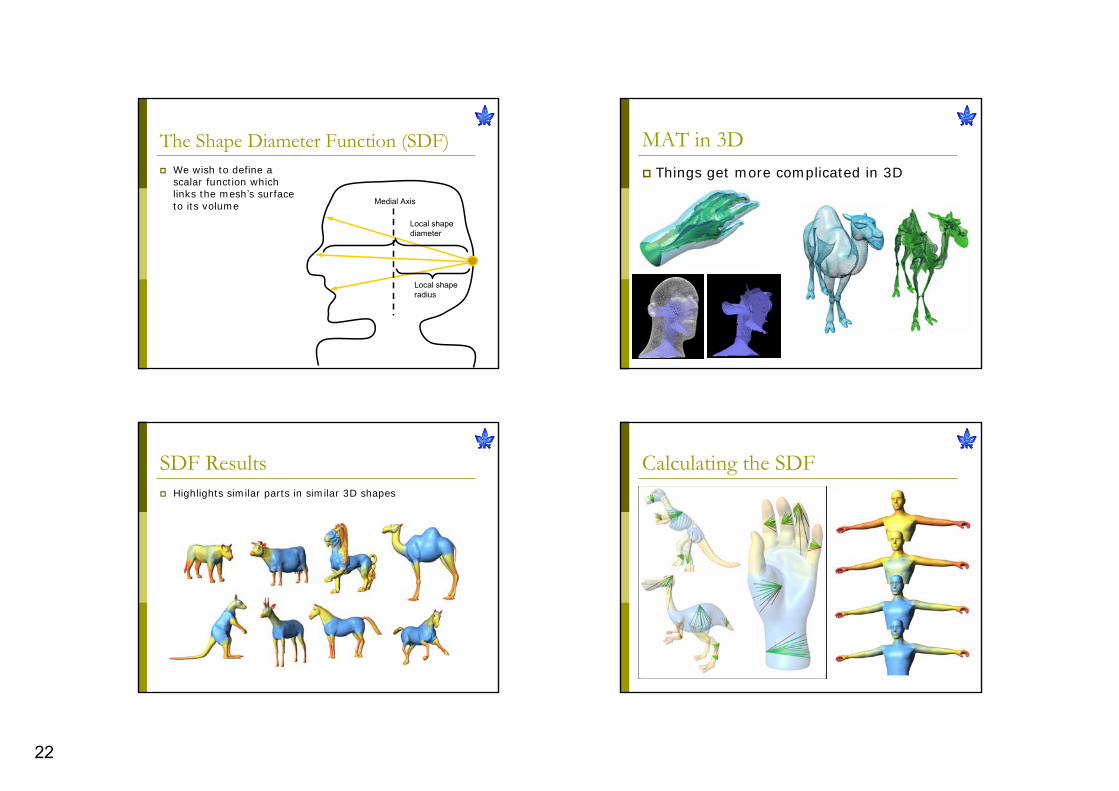
MAT in 3DThings get more complicated in 3D
Instead of circles we grow spheresThe MAT is a complicated structure composed of sheets and linesThe MAT is difficult to compute and hard to handle
22
MAT in 3DThings get more complicated in 3D
The Shape Diameter Function (SDF)
Medial Axis
Local shaperadius
Local shapediameter
We wish to define a scalar function which links the mesh’s surface to its volume
Calculating the SDFSDF ResultsHighlights similar parts in similar 3D shapes

23
SDF ResultsRemains consistent through pose differences of the same object
Mesh Partitioning using the SDFThe SDF gives a good intuition by itself on a logical partitioning, but not perfect
The rays in this part see a ‘larger’ part of the mesh
Mesh Partitioning using the SDFWe find good partitioning values, which divide the mesh into significant parts
A partitioning is defined, but it is noisy
Mesh Partitioning using the SDFWe find good partitioning values, which divide the mesh into significant parts
A mincut operation is performed to improve the boundaries between the different parts

24
Mesh CorrespondenceGiven a logical partitioning of different meshes, its easier to find correspondence between different parts
•A signature is defined for each part consisting of
•Relative size in mesh
•Part valence (number of neighboring parts)
•Average SDF value (normalized to mesh)
•Local SDF histogram
Mesh CorrespondenceGiven a logical partitioning of different meshes, its easier to find correspondence between different parts
•A greedy algorithm is employed, matching the best matching parts between two models
•We attempt to match the neighboring parts of the first matched parts
•The algorithm continues recursively until all parts are matched (if possible)
Partial CorrespondenceNot all meshes have the same parts
In some cases we wish to find correspondence only between specific parts, possibly a one-to-many connection
Application – Motion TransferHere we transfer motion between analogous parts of multiple models

25
Application – Motion TransferHere we transfer motion between analogous parts of multiple models The End