senzori blizine
TRANSCRIPT

SEMINARSKI RAD IZ PREDMETAMJERENJE I KONTROLA
Tema: Senzori blizine

1. UVOD
Sam razvoj uređaja koji čovjeka zamjenjuju na onim mjestima, za koje su se strojevi pokazali produktivnijim, tekao je određenim slijedom.Došlo je do velikog razvoja robota, čija će primjena biti izražena i u budućnosti. Za same proizvođače postavlja se jedan veoma osjetljiv zadatak, a to je proizvodnja senzora, i zamjena ljudskih sa visoko razvijenih senzoričkih sposobnosti.Senzori isporučuju samo djelomičnu informaciju, zbog čega je potrebno razviti sisteme koji su izgrađeni s više različitih senzora.
Senzor je tehnički pretvornik, koji pretvara fizičku veličinu (npr.temperaturu, udaljenost, pritisak) u neku drugu veličinu, koja se lako obrađuje najčešće električni signal.
Neki od zahtijeva koji se postavljaju za primjenu senzora u robotici su:
- da bi pokazali uglovni položaj zgloba, obično se na svaku osovinu robota stavlja enkoder,- mogućnost transformacije zglobnih koordinata u kartezijskom koordinatnom sistemu,-primjena telerobotike na mjestima gdje ne može biti prisutan čovjek (npr.svemir),-stepen određenja je određen autonomno od okoline i teško se održava.
Karakteristika senzora je da imaju izlazni signalkoji se mijenja kada je blizina objekta veća ili manja od određene vrijednosti. Često se još zovu i relejnim senzorima odnosno prekidačima . Senzori blizine su jeftini, jednostavni i izdržljivi.Osnovna primjena ovih senzora u robotici je kod brojanja komada i pri detekciji prisustva objekta i prepreka.
2

Slika 1. Primjena senzora blizine
U mnogim proizvodnim sistemima se za utvrđivanje pomaka koriste mehanički preklopnici položaja.Drugi nazivi su mikroprekidači, granični prekidači ili graničnici.Kako se gibanja pojedinog izvršnog elementa (aktuatora) detektiraju mehaničkim kontaktom, tako postoje kontaktni i bezkontaktni davači signala.Kontaktni prekidači stari su koliko i elektrotehnika, dok su bezkontaktni prekidači počeli koristiti prije 40. godina. Duže vrijeme bili su samo alternativa mehaničkim kontaktnim prekidačima , i zbog male serijske proizvodnje bili su skupi.
Prednosti bezkontaktnih senzora blizine su:-Tačno i automatsko uočavanje položaja,-Bezkontaktni osjet objekta i veličina procesa. Kod elektroničkih senzora nema kontakta između senzora i objekta,
3

-Brzo spajanje, kod njih nema iskrenja i ne proizvode lažne impulse,-Otporni su na trošenje, jer nemaju pokretnih dijelova koji se mogu istrošiti,-Izvedbe za opasne okoline (npr. područja u kojima postoji opasnost od eksplozije).
2. Podjela senzora blizine
Senzore blizine dijelimo na:- Induktivne senzore blizine,- Reed senzori,- Kapacitivne senzore blizine,- Ultrazvučne senzore blizine i- Optičke senzore blizine.
2.1 Induktivni senzori blizine
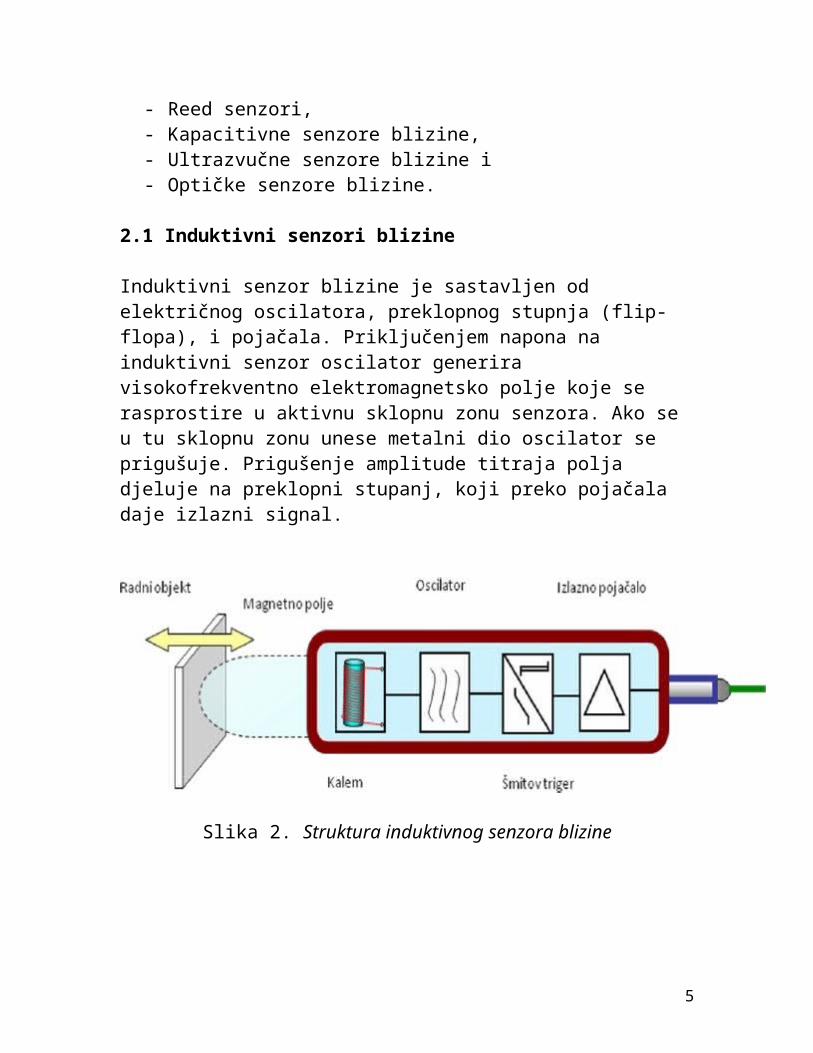
Induktivni senzor blizine je sastavljen od električnog oscilatora, preklopnog stupnja (flip-flopa), i pojačala. Priključenjem napona na induktivni senzor oscilator generira visokofrekventno elektromagnetsko polje koje se rasprostire u aktivnu sklopnu zonu senzora. Ako se u tu sklopnu zonu unese metalni dio oscilator se prigušuje. Prigušenje amplitude titraja polja djeluje na preklopni stupanj, koji preko pojačala daje izlazni signal.
Slika 2. Struktura induktivnog senzora blizine
4
Priključenjem senzora na izvor napajanja električnom energijom dolazi do oscilacija na rezonantnoj frekvenciji. Ove oscilacije su uzrok stvaranja elektromagnetnog polja čiji je pravac prostiranja u smijeru ose senzora.Izlazni se signal mijenja s promjenom udaljenosti predmeta. Induktivni senzori se prave kao: U-profil, cilindrični profil i prizmatični profil.
Slika 3. Konstruktivne izvedbe induktivnih senzora
Kućište ovih senzora se uglavnom pravi od nehrđajućeg čelika ili polimera.Na samom kućištu se često ugrađuju LED-diode za vizualnu indikaciju stanja i ispravnost napajanja. Induktivni senzori se lako ugrađuju.
Slika 4. Konstrukcioni detalji ugradnje induktivnih senzora: a) direktna ugradnja, b) ugradnja u udubljenju, c) ugradnja u nizu, d) detekcija ugaone
brzine, e) detekcija ugaonog ubrzanja
5

Induktivni senzori blizine imaju sljedeće prednosti u usporedbi sa Reed senzorima:
- nema problema s iskrenjem kontakata,- nema trošenja, jer nema pomičnih dijelova,- ukoliko se osi magnetskih polova ispravno postave stvara se samo
jedno područje prekapčanja.
2.2 Reed senzori blizine
Reed kontakt je senzor blizine kojeg aktivira magnetizam. Sastoji se od dva kontakta smještena u staklenu cijev ispunjenu inertnim plinom. Magnetsko polje uzrokuje uključenje reed senzora. Kontaktna pera se zatvaraju kada dovedemo permanentni magnet ispod reed senzora, te se time omogućuje tok struje u strujnom krugu.
Slika 5. Reed senzor
U slučaju kada upravljanje elektropneumatskog sistema zahtijeva da su kontakti reed senzora spojeni u normalno zatvorenom položaju (mirni kontakt), dodaje se konstrukcijski mali permanentni magnet koji drži kontakte u spojenom stanju. Kontakti se odpajaju kada se pojavi jače magnetsko polje. Ova vrsta senzora ima dugi vijek trajanja, veliku pouzdanost i vrlo kratko vrijeme spajanja (oko 0,2ms). Loše strane su što se ne može upotrebljavati u okruženju jakih magnetskih polja i u blizini prostora gdje se zavaruje.
6

2.3 Kapacitivni senzor blizine
Princip rada ovih senzora sličan je principu rada induktivnih senzora. Rad senzora je miran i bezkontaktan. Sastavljen je od oscilatora samo što nema induktivni svitak već kondenzator i otpornik u sklopu RC oscilatora. Elektrostatičko polje se generira između anode i katode kondenzatora, a prostire se u polje ispred senzora. Dolaskom predmeta u blizinu mijenja se kapacitet kondenzatora. Oscilator se prigušuje i na izlazu se pojavi signal.
Slika 6. Struktura kapacitivnog senzora
Kod ovih se senzora dielektrična konstanta kreće blizu jedinice.Zbog toga nisu pogodni za detekciju predmeta od prozirnih materijala.
2.4. Ultrazvučni senzori blizine
Osnovni elementi ultrazvučnog senzora blizine su: ultrazvučni primopredajnik, uređaj za formiranje izlaznog signala i pojačivač. Ovi senzori se koriste kao senzori blizine, a mogu poslužiti i za određivanje zglobne brzine. Mogu biti izvedeni kao pijezoelektrični, a obično se prave kao elektrostatički. Radna frekvencija elektrostatičkih senzora je 250 kHz. Izgrađeni su od dvije metalne elektrode priključene na jadnosmijerni prednapon (300V), tako da se međusobno privlače.Jedna elektroda je fiksirana, dok druga koja je pričvršćena po obodu počinje vibrirati u skladu sa silom stvarajući ultrazvučne talase.
7

Slika 7. Struktura ultrazvučnog senzora
Pijezoelektrični primopredajnici se prave od pijezoelektričnih materijala. Priključenjem pijezoelektrične membrane na naizmjenični napon, ona počne da osciluje i djeluje kao generator ultrazvuka.Pri gradnji ovih senzora javlja se više problema (nejednaka brzina prostiranja ultrazvuka u različitim medijima, zavisnost brzine od temperature i pritiska vazduha, slabljenje intenziteta zbog radijalnog širenja i apsorpcije, djelovanje šuma i dr.)
2.5 Optički senzori blizine
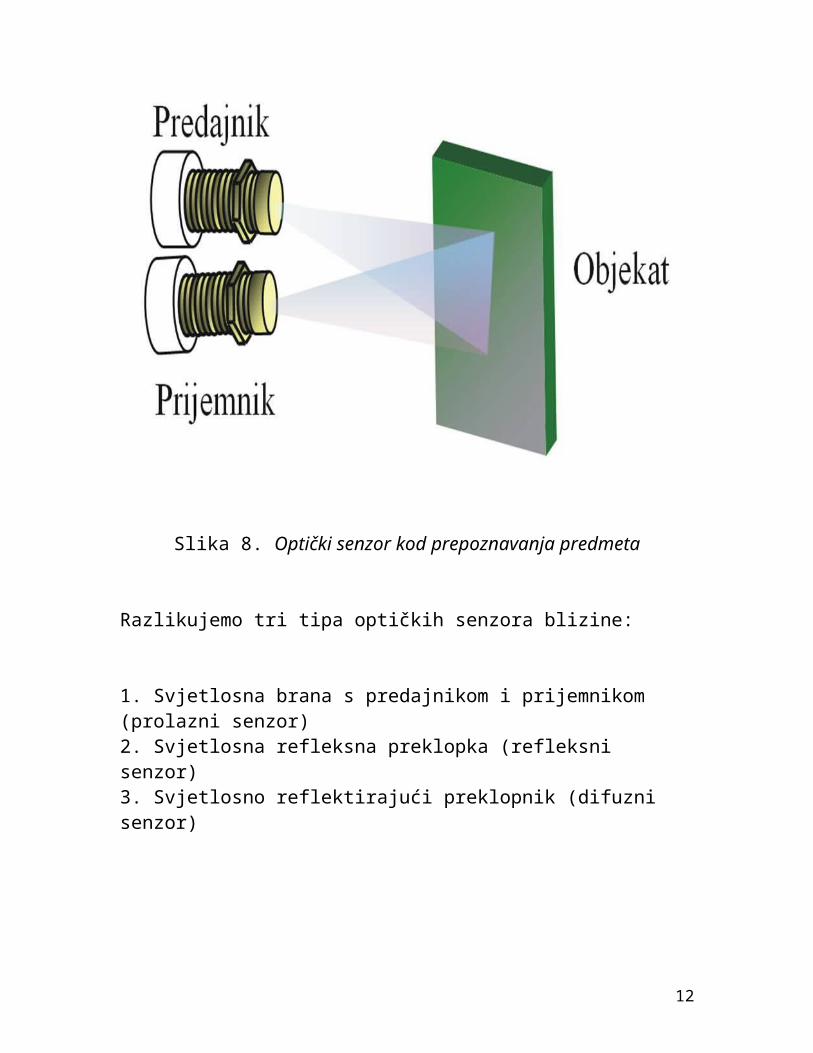
Optički senzori blizine se za uočavanje predmeta koriste optikom i elektronikom. Senzori rade sa crvenim i infracrvenim svjetlom. Poluvodičke diode koje proizvode svjetlost (LED) su posebno pouzdan izvor crvenog i infracrvenog svjetla. Male su, robusne, imaju dug radni vijek i lako ih je ugraditi. Kao prijemnici se koriste fotodiode i fototranzistori. Pri namještanju prednost imaju senzori s vidljivom, crvenom svjetlošću, za razliku od nevidljive infracrvene.Optički senzori koji imaju refleksiju na objektu tačno prepoznaju objekat na određenoj udaljenosti, koja je ovisna o intenzitetu emitovane svjetlosti, položaja predmeta u odnosu na prijemnik i predajnik.
8

Slika 8. Optički senzor kod prepoznavanja predmeta
Razlikujemo tri tipa optičkih senzora blizine:
1. Svjetlosna brana s predajnikom i prijemnikom (prolazni senzor)2. Svjetlosna refleksna preklopka (refleksni senzor)3. Svjetlosno reflektirajući preklopnik (difuzni senzor)
Svjetlosna brana s predajnikom i prijemnikom (polazni senzor) još se naziva jednosmijerna svjetlosna preklopka je optički senzor s odvojenim odašiljačem i prijemnikom postavljenim tako da je svjetlosna zraka odašiljača usmjerena na prijemnik. Izlaz prijemnika daje signal ako se ta zraka prekine „Senzor se aktivira mrakom“.
9

Slika 9. Šematski dijagram prolaznog senzora
Svjetlosna refleksna preklopka (refleksni senzor) je tip optičkog senzora kod kojeg su odašiljač i prijemnik smješteni u zajedničkom kućištu.Reflektor je jedna refleksna površina koja se postavi tako da se odašiljana zraka kompletno reflektira i vrati do prijemnika. Također u slučaju prekida zrake na izlazu se pojavi signal.
Slika 10. Šematski dijagram refleksnog senzora
Svjetlosno reflektujući preklopnik (difuzni senzor) se također sastoji od odašiljača i prijemnika u jednom kućištu, ali nema reflektor.Umjestoreflektora zraka se reflektira od predmeta koji dođe u blizinu. Zbog takvog principa rada svjetlosno reflektujući optički senzor se upotrebljava na manjim udaljenostima i dio stroja ili obrađivani predmet čija se blizina mora detektirati, mora imati dobru reflektirajuću površinu (npr. polirana metalna površina ili svijetlo obojena površina).
10

3. Zaključak
Uz mogućnosti koje se pružaju integracijom senzora i njihovu široku primjenu i fleksibilnost moguće je vrlo jeftino i efikasno osmisliti donedavno nezamisliva rješenja za nadzor ili kontrolu sistema.Niske cijene integriranih senzora, koji uz to imaju ogroman broj različitih izvedbi dovele su do toga da se u skoro sve napredne elektroničke uređaje (koje imaju mikroprocesor) ugrađuju senzori, pa čak i u ručne satove i mobilne uređaje.Što se tiče industrijskih rješenja automatskog upravljanja, u njima se već odavno koriste integrirani senzori jer je kod njih zbog potrebe za nadzorom parametara puno ranije dosegnut prag isplativosti.Zapravo se za „ozbiljnu“ primjenu više značaja daje pouzdanosti sistema nego njegovoj cijeni.
11
4. Sadržaj
1. Uvod.......................................................................................................2
2. Podjela senzora.......................................................................................4 2.1.Induktivni senzor blizine..................................................................4 2.2.Reed senzori blizine.........................................................................6 2.3.Kapacitivni senzori blizine...............................................................7 2.4.Ultrazvučni senzori blizine...............................................................7 2.5.Optički senzori blizine......................................................................8
3. Zaključak...............................................................................................11
4. Sadržaj...................................................................................................12
5. Literatura...............................................................................................13
12

5. Literatura
1. „Robotika“ dr. Isak Karabegović, dr. Vlatko Doleček; Bihać 20022. http://www.tsrb.hr/meha/index.php?option=com_content&task=view&id=51&Itemid=13. http://www.google.ba/search?hl=hr&lr=lang_hr&q=senzori&start=10&sa=N
13