sensor positioning in wireless ad-hoc sensor networks using multidimensional scaling xiang ji and...
TRANSCRIPT
Sensor Positioning in Wireless Ad-hoc Sensor Networks Using Multidimensional Scaling
Xiang Ji and Hongyuan ZhaDept. of Computer Science and Engineering, The Pennsylvania State University
INFOCOM 2004
Presenter: Sheng-Shih Wang
March 15, 2004

Outline
Introduction Previous Works Challenges Calculating Relative Positions With
Multidimensional Scaling Aligning Relative Positions Distributed Sensor Positioning Methods Experimental Results Conclusion

Introduction
Why the physical positions of sensors is important For object detection or tracking For communication protocol establishment
Previous Works
Global Positioning System (GPS) High cost
Other Methods Class 1
Improve the accuracy of distance estimation with different signal techniques
RSSI, ToA, TDoA, AoA

Previous Works (cont.)
Class 2 Relies on a large amount of sensor nodes with posit
ions known (i.e., beacon or anchor node) densely distributed in a sensor network
Class 3 Employ distance vector exchange to find the distan
ces from the non-anchor nodes to the anchor nodes Class 4
Locally calculate maps of adjacent nodes with trilateration or multilateration

Challenges
• Estimated distances of AC and BC are increased

Challenges (cont.)
• Estimated distances of AC and BC are increased

Challenges (cont.)
• In real world (irregular radio pattern)In real world (irregular radio pattern)The radio range of a sensoris different at different directions

Challenges (cont.)
• The complexity of the terrainleads to different signalattenuation factors andradio ranges

Calculating Relative Positions With Multidimensional Scaling
The Multidimensional Scaling (MDS) The analysis of dissimilarity of data on a set of
objects Discover the spatial structures in the data
Advantages for position estimation MDS always generates relatively high
accurate position estimation even based on limited and error-prone distance information

The Classical MDS
The classical MDS [3]
(If all pairwise distances of sensors are collected)

The Classical MDS (cont.)

The Iterative MDS
The iterative MDS

The Iterative MDS (cont.)
Known position: A,B,C,D
Unknown position: E,F

Aligning Relative Positions
To compute the physical positions of sensors
Align the relative positions to physical positions with the aid of sensors with positions known
Includes shift, rotation, and reflection of coordinates

Distributed Sensor Positioning Methods
Employ distance measurement model of RSSI
The power of the radio signal attenuates exponentially with distance
Receiver can estimate the distance to the sender by measuring the attenuation of radio signal strength

Distributed Position Estimation with Anchor Sensors
Adjacent areaAdjacent area: the sensor position are estimated with MDS
The average radio range is estimated with the hop count and physical distance

Distributed Position Estimation with Anchor Sensors (cont.)
A: Starting Anchor
D, H: Ending Anchors

Distributed Position Estimation with Anchor Sensors (cont.)
Local map

On Demand Distributed Position EstimationStudy case: one sensor’s position is needed to be estimated

Experimental Results --- Simulation Model
Simulator: Matlab 400 nodes Randomly placed 100-by-100 square region

Experimental Results --- Two Strategies
The 1st strategy The average radio range is 10
The 2nd strategy The region is equally divided into four
non-overlapped square regions Sensors have different radio ranges
The average radio ranges in different small square regions are 7, 8.5, 10, and 11.5

Experimental Results --- Evaluation Criteria
n: the total number of sensors
m: the number of anchors
A low error means good performance of the evaluated method

Physical positionsof sensors in
an adjacent area
Recovered relativepositions
(classical MDS)
After alignment(classical MDS)

Experimental Results --- Classical MDS
The increase of error rates different conditions is always slower than the increase of distance measurement error The classical MDS is robust in tolerating measurement errors of sensor distance
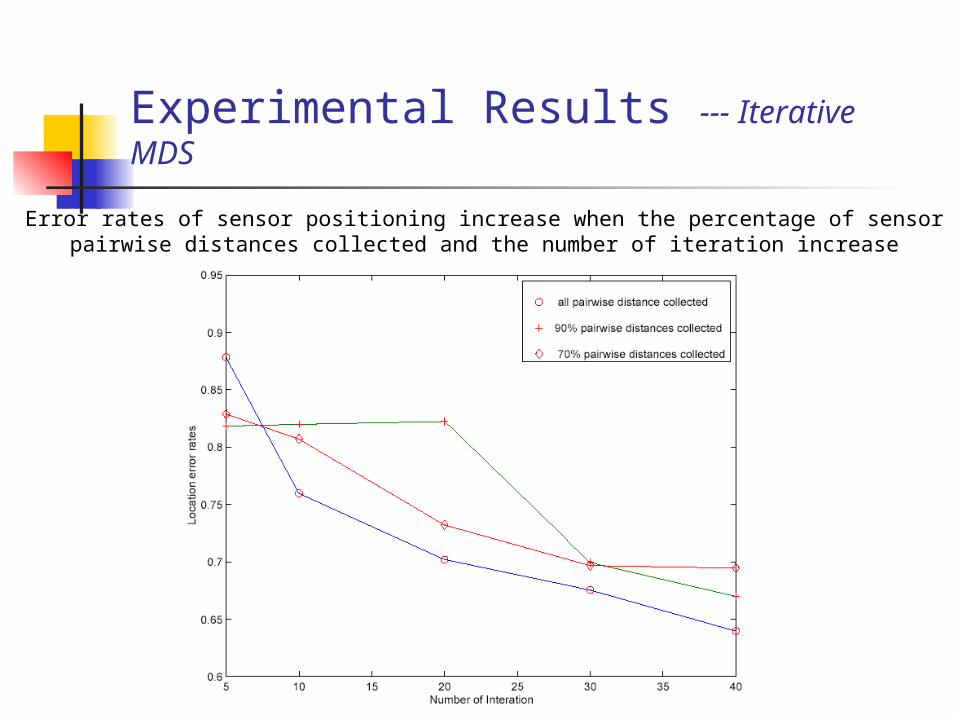
Experimental Results --- Iterative MDS
Error rates of sensor positioning increase when the percentage of sensorpairwise distances collected and the number of iteration increase

Experimental Results --- Iterative MDS (cont.)
When the collected pairwise distance and the number of iteration are fixed,the error rates of sensor positioning increase with the increase of distance measurement error

Experimental Results --- Results (cont.)
Errors when applying the distributed positioning method with anchor sensors to all sensorsin a square region with an uniform radio range and different distance measurement errors
The distance measurementerror rate

Experimental Results --- Results (cont.)
Errors when applying the distributed positioning method with anchor sensors to all sensorsin a square region with different signal attenuation factors (radio ranges)

Experimental Results --- Results (cont.)
Errors when applying the distributed on demand positioning method to one sensorin two square region with uniform and different signal attenuation factors, respectively
8 anchors (5% of total number of sensors)

Conclusion
The MDS-based positioning technique Compute relative positions of sensors The distributed sensor positioning method
Get the accurate position estimation Reduce error cumulation
The on demand position estimation method For one or several adjacent sensors positioning
Can work in networks with anisotropic topology and complex terrain
Advantage Effective, Efficient