"sensing technologies for the autonomous vehicle," a presentation from nxp semiconductors
TRANSCRIPT

Copyright © 2016 2016 NXP Semiconductor 1
Tom Wilson
May 3, 2016
Sensing Technologies for the
Autonomous Vehicle
Copyright © 2016 2016 NXP Semiconductor 2
Driver Assistance
Partial Automation
Semi autonomous
Fully autonomous
Eyes off
ADAS: From Safety to Autonomous
ADAS: >$11B in 2016 growing to
>$130B in 2026 CAGR ~29% ABI Research, 2016
How?
“All our knowledge begins with the senses” Immanuel Kant
Copyright © 2016 2016 NXP Semiconductor 3
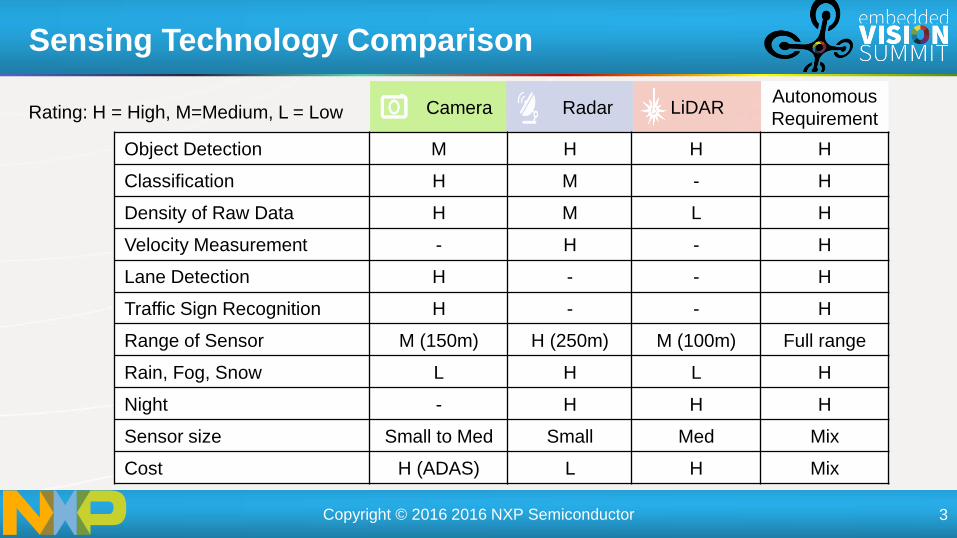
Autonomous
Requirement
Sensing Technology Comparison
Camera Radar LiDAR
Object Detection M H H H
Classification H M - H
Density of Raw Data H M L H
Velocity Measurement - H - H
Lane Detection H - - H
Traffic Sign Recognition H - - H
Range of Sensor M (150m) H (250m) M (100m) Full range
Rain, Fog, Snow L H L H
Night - H H H
Sensor size Small to Med Small Med Mix
Cost H (ADAS) L H Mix
Rating: H = High, M=Medium, L = Low
Copyright © 2016 2016 NXP Semiconductor 4
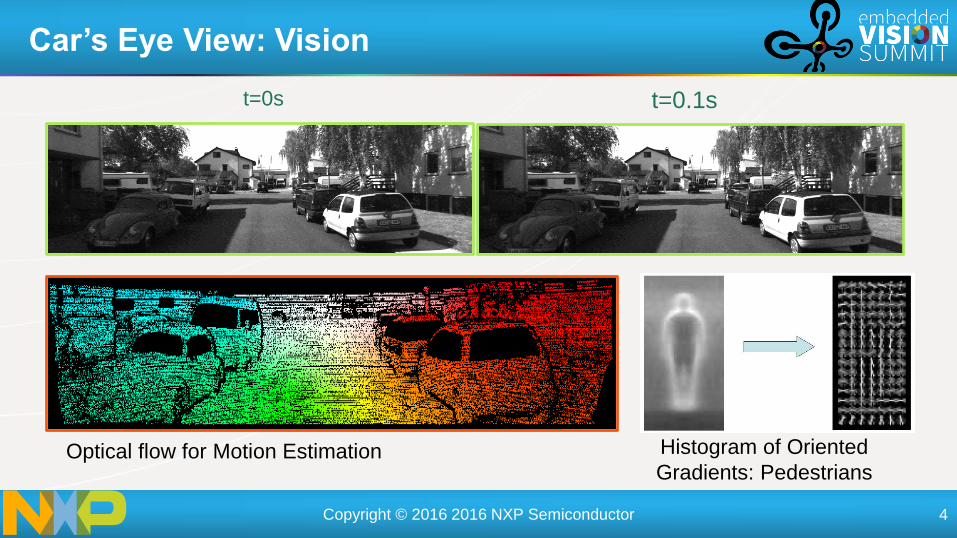
Car’s Eye View: Vision
t=0.1s t=0s
Optical flow for Motion Estimation Histogram of Oriented
Gradients: Pedestrians
Copyright © 2016 2016 NXP Semiconductor 5
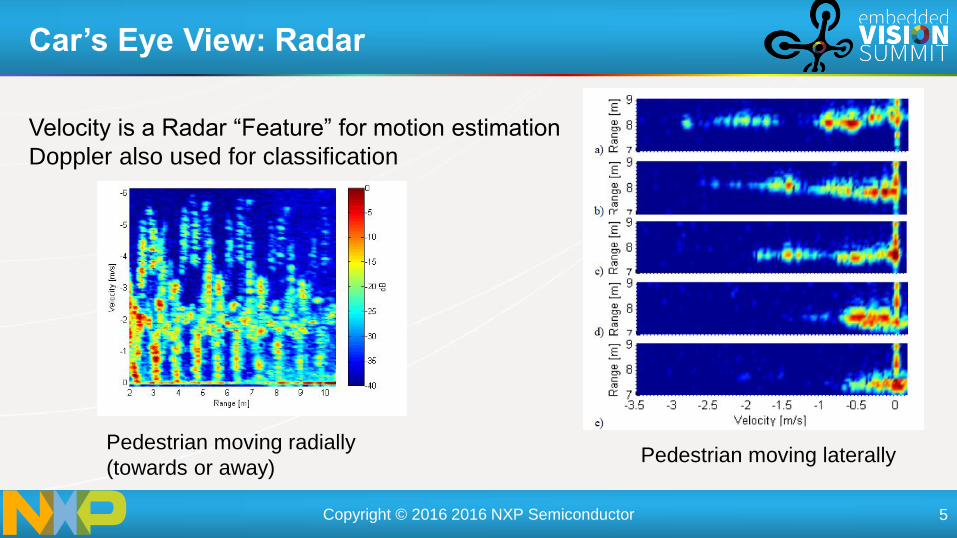
Car’s Eye View: Radar
Pedestrian moving radially
(towards or away) Pedestrian moving laterally
Velocity is a Radar “Feature” for motion estimation
Doppler also used for classification
Copyright © 2016 2016 NXP Semiconductor 6
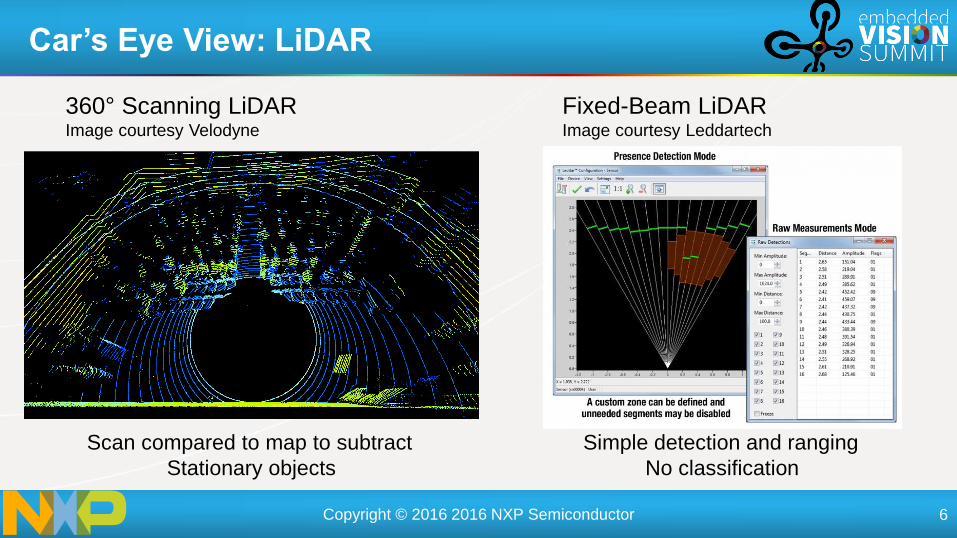
Car’s Eye View: LiDAR
360° Scanning LiDAR Image courtesy Velodyne
Fixed-Beam LiDAR Image courtesy Leddartech
Scan compared to map to subtract
Stationary objects
Simple detection and ranging
No classification
Copyright © 2016 2016 NXP Semiconductor 7
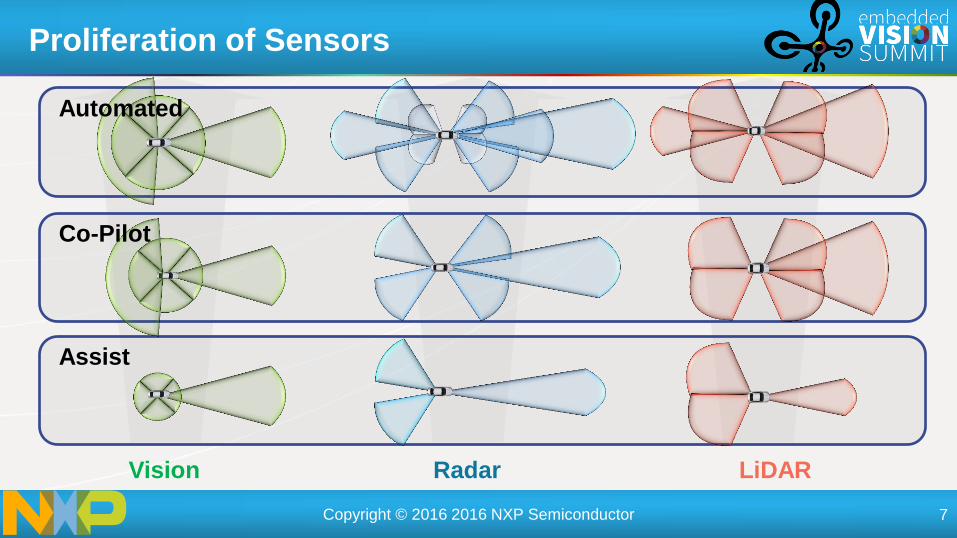
Proliferation of Sensors
Assist
Co-Pilot
Automated
Vision Radar LiDAR
Copyright © 2016 2016 NXP Semiconductor 8
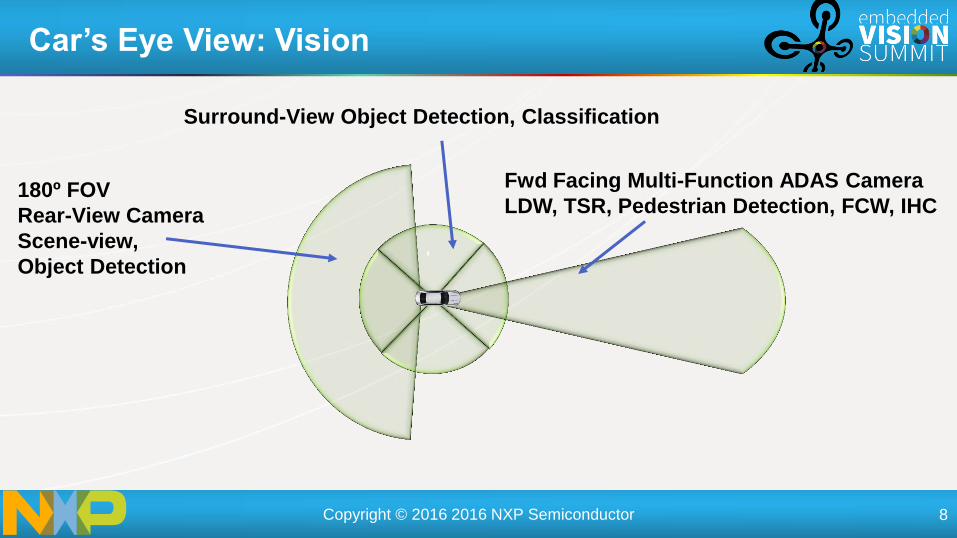
Car’s Eye View: Vision
Fwd Facing Multi-Function ADAS Camera
LDW, TSR, Pedestrian Detection, FCW, IHC
Surround-View Object Detection, Classification
180º FOV
Rear-View Camera
Scene-view,
Object Detection
Copyright © 2016 2016 NXP Semiconductor 9
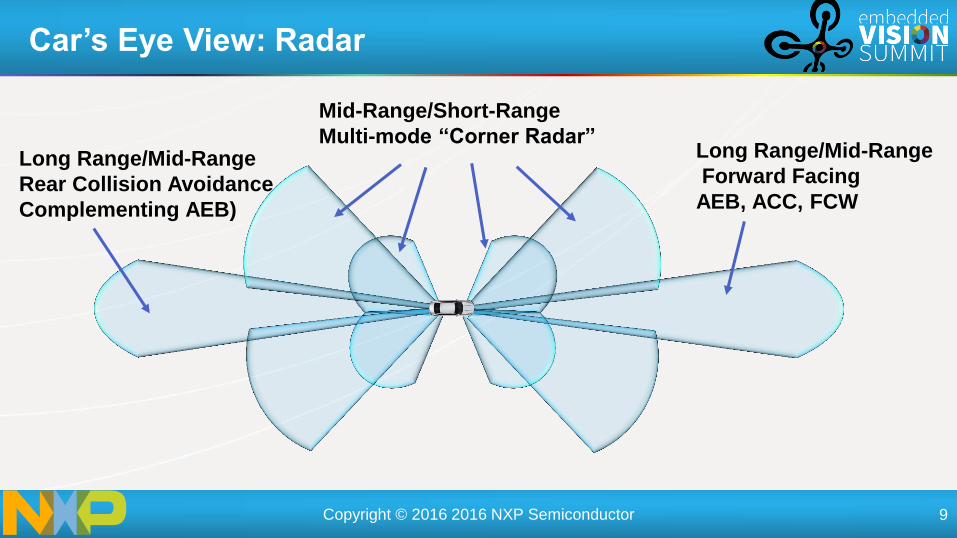
Car’s Eye View: Radar
Long Range/Mid-Range
Forward Facing
AEB, ACC, FCW
Mid-Range/Short-Range
Multi-mode “Corner Radar” Long Range/Mid-Range
Rear Collision Avoidance
Complementing AEB)
Copyright © 2016 2016 NXP Semiconductor 10
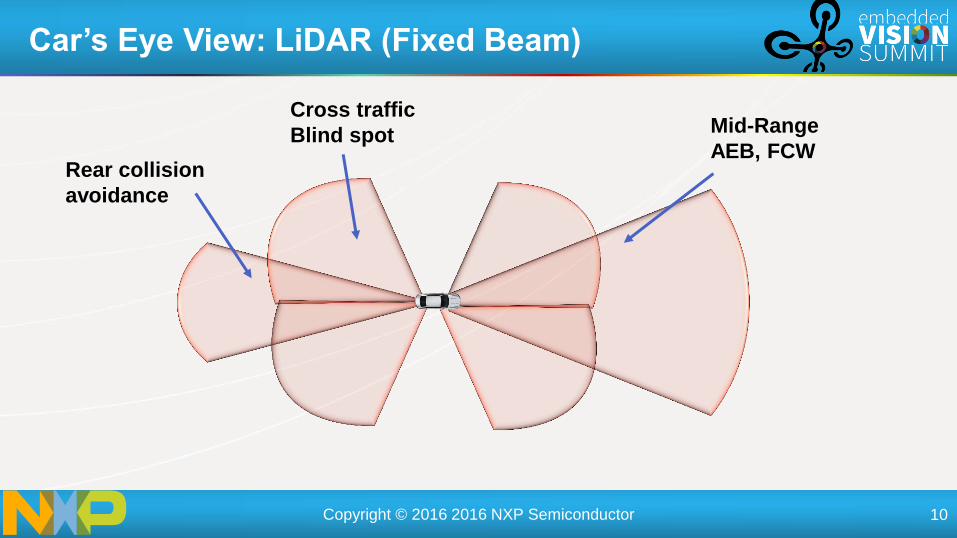
Car’s Eye View: LiDAR (Fixed Beam)
Mid-Range
AEB, FCW
Cross traffic
Blind spot
Rear collision
avoidance
Copyright © 2016 2016 NXP Semiconductor 11
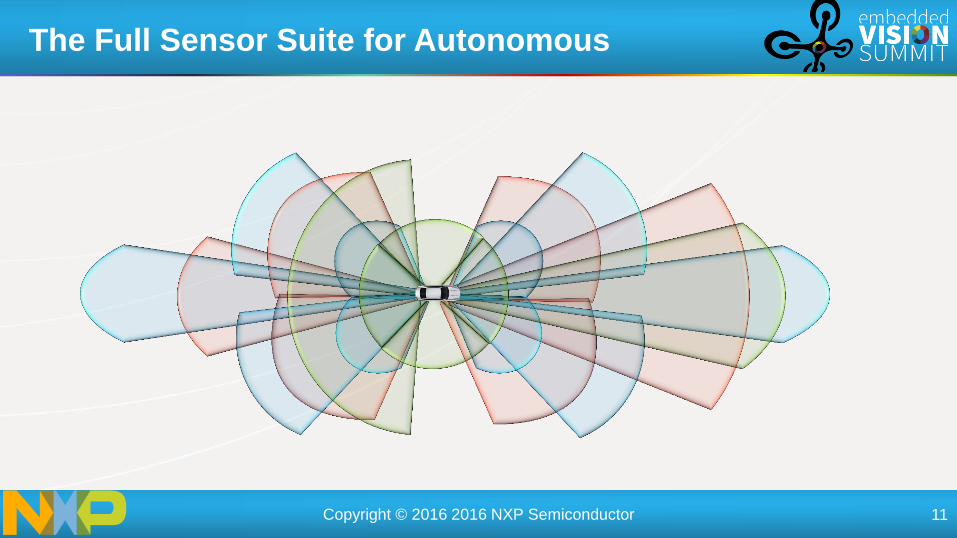
The Full Sensor Suite for Autonomous
Copyright © 2016 2016 NXP Semiconductor 12
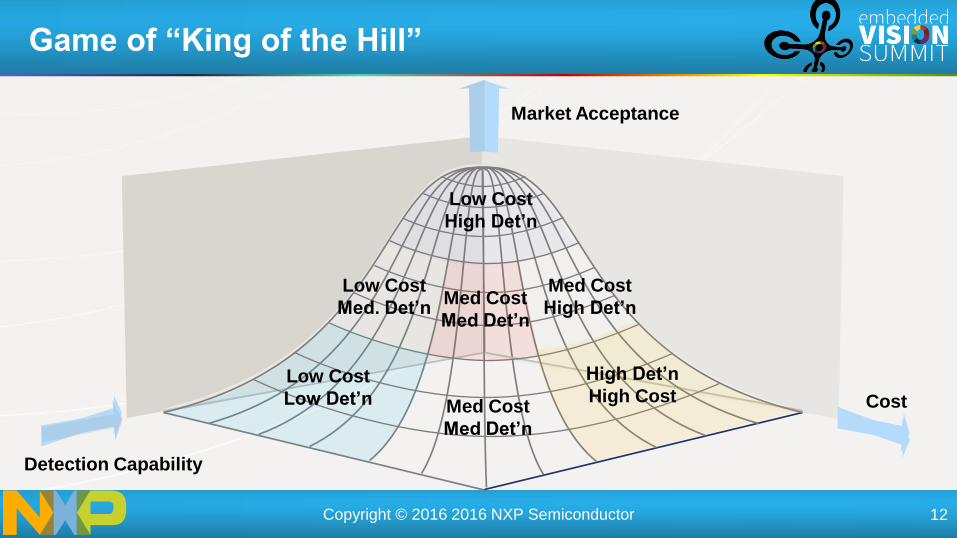
Game of “King of the Hill”
Market Acceptance
Detection Capability
Cost
Low Cost
Low Det’n
High Det’n
High Cost
Low Cost
Med. Det’n Med Cost
Med Det’n
Med Cost
Med Det’n
Med Cost
High Det’n
Low Cost
High Det’n
Copyright © 2016 2016 NXP Semiconductor 13
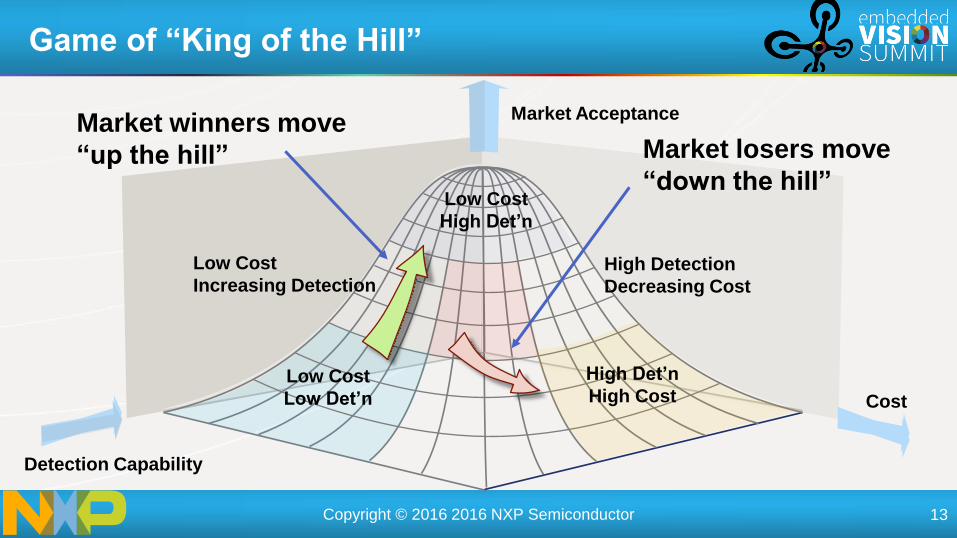
Game of “King of the Hill”
Detection Capability
Cost
Market Acceptance
High Detection
Decreasing Cost
Low Cost
Increasing Detection
Low Cost
Low Det’n
High Det’n
High Cost
Low Cost
High Det’n
Market winners move
“up the hill” Market losers move
“down the hill”
Copyright © 2016 2016 NXP Semiconductor 14
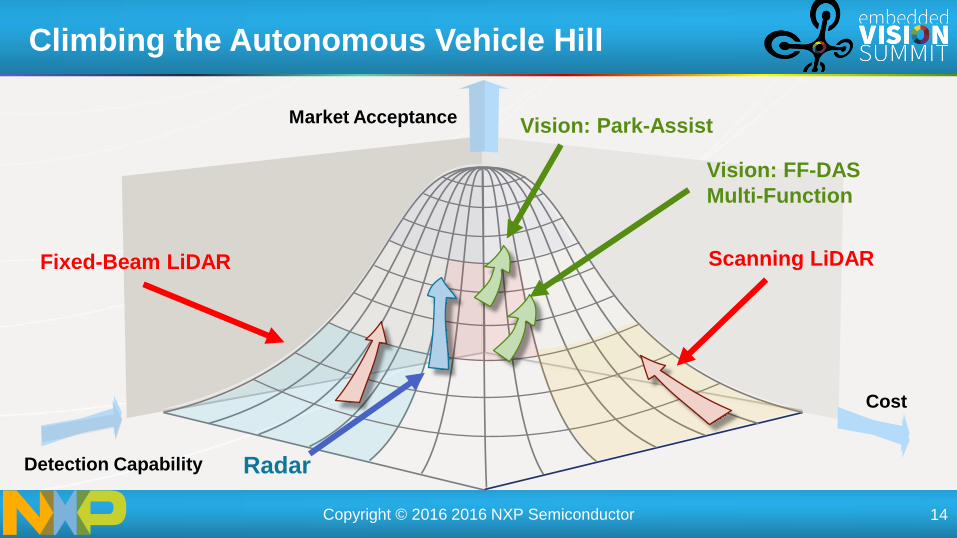
Climbing the Autonomous Vehicle Hill
Detection Capability
Cost
Market Acceptance
Vision: FF-DAS
Multi-Function
Scanning LiDAR
Radar
Vision: Park-Assist
Fixed-Beam LiDAR
Copyright © 2016 2016 NXP Semiconductor 15
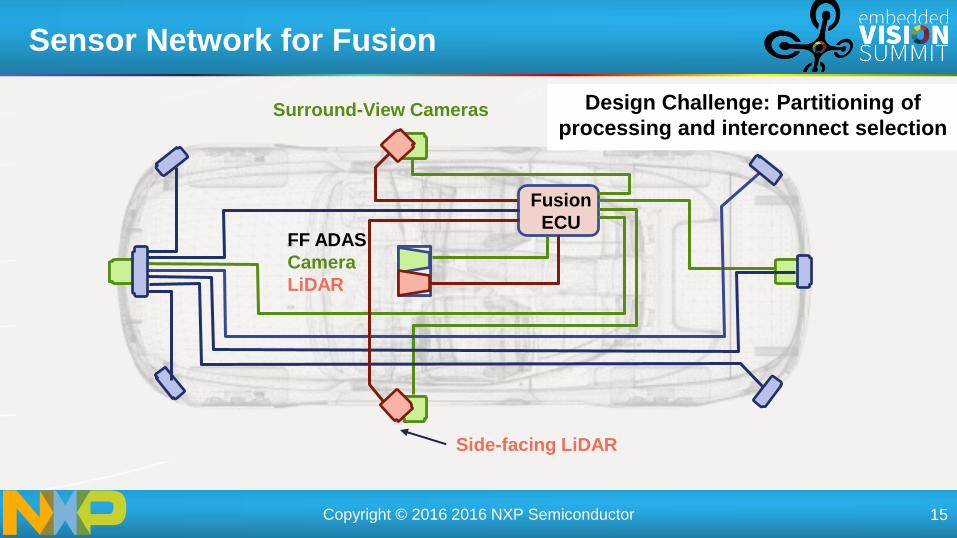
Sensor Network for Fusion
Fusion
ECU FF ADAS
Camera
LiDAR
Surround-View Cameras
Side-facing LiDAR
Design Challenge: Partitioning of
processing and interconnect selection
Copyright © 2016 2016 NXP Semiconductor 16
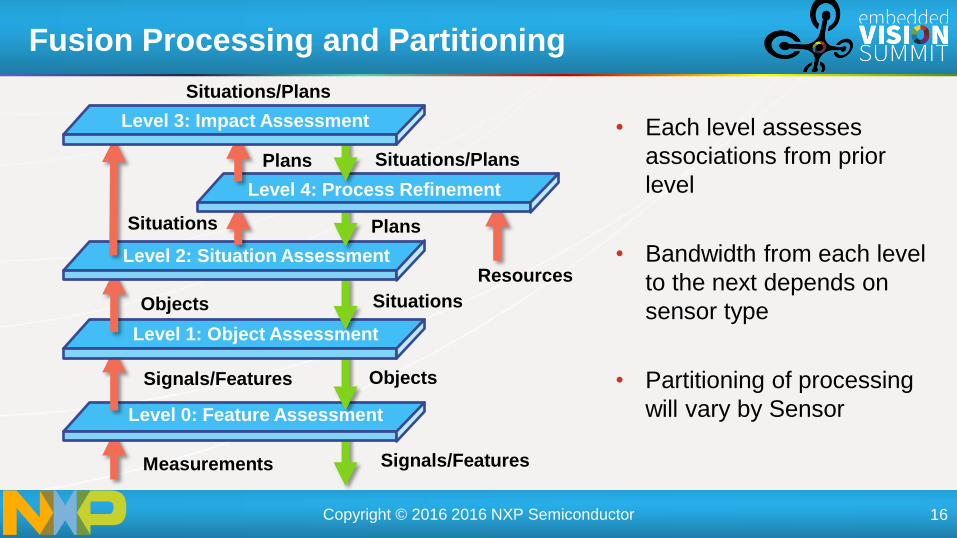
• Each level assesses
associations from prior
level
• Bandwidth from each level
to the next depends on
sensor type
• Partitioning of processing
will vary by Sensor
Fusion Processing and Partitioning
Level 0: Feature Assessment
Level 1: Object Assessment
Level 2: Situation Assessment
Level 4: Process Refinement
Level 3: Impact Assessment
Resources
Signals/Features
Measurements
Objects
Situations
Situations/Plans
Situations/Plans Plans
Plans
Situations
Objects
Signals/Features
Copyright © 2016 2016 NXP Semiconductor 17
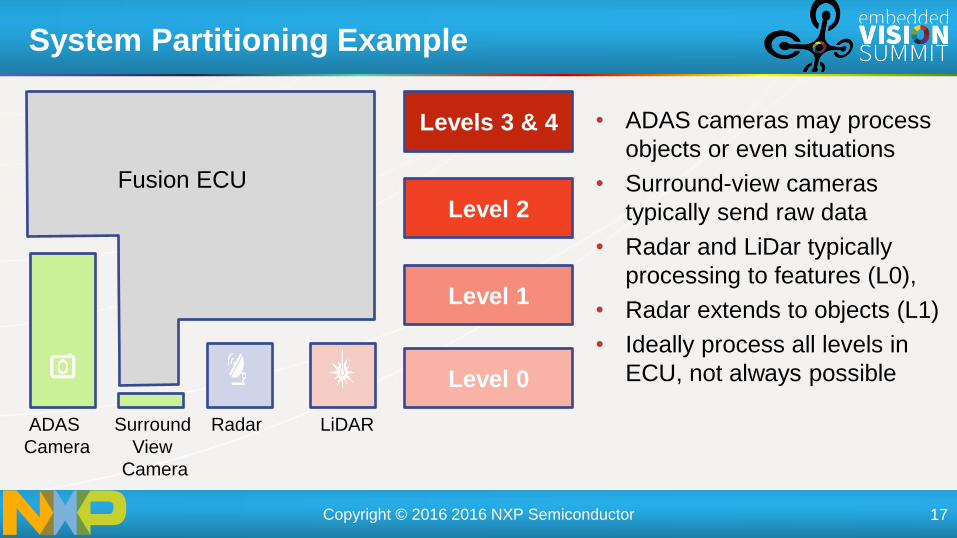
• ADAS cameras may process
objects or even situations
• Surround-view cameras
typically send raw data
• Radar and LiDar typically
processing to features (L0),
• Radar extends to objects (L1)
• Ideally process all levels in
ECU, not always possible
System Partitioning Example
ADAS
Camera
Radar LiDAR
Levels 3 & 4
Level 2
Level 1
Level 0
Fusion ECU
Surround
View
Camera

Copyright © 2016 2016 NXP Semiconductor 18
• No single sensing technology will provide complete information coverage
• Cameras, Radar, LiDAR (and ultrasound!) will all be utilized and fusion
processing elaborates knowledge from the full range of sensing data
• Key challenge: how to partition fusion processing within the constraints of
• Bandwidth / processing capability
• Getting the most reliable impact assessments
• NXP enables autonomous driving with front-end sensors, radar, vision and LiDAR
processing, interconnect technology, fusion processing and vehicle (V2X) comms
Summary