seminar informatica sectia engleza eometriecpintea/data/uploads/ag-solved-questions.pdf · 1...
TRANSCRIPT

1
SeminarINFORMATICA SECTIA ENGLEZA (GEOMETRIE)
1. Let d1, d2, d3, d4 be pairwise skew straight lines. Assuming that d12 ⊥ d34 and d13 ⊥ d24,show that d14 ⊥ d23, where dik is the common perpendicular of the lines di and dk.Solution. A director vector of the common perpendicular di j is
→d i ×
→d j, where
→d r stands
for a director vector of dr. Therefore we have successively:
d12 ⊥ d34 ⇔→d 1 ×
→d 2⊥
→d 3 ×
→d 4⇔ (
→d 1 ×
→d 2) · (
→d 3 ×
→d 4) = 0
⇔
∣∣∣∣∣→d 1 ·
→d 3→d 1 ·
→d 4
→d 2 ·
→d 3→d 2 ·
→d 4
∣∣∣∣∣= 0⇔ (→d 1 ·
→d 3)(
→d 2 ·
→d 4) = (
→d 1 ·
→d 4)(
→d 2 ·
→d 3).
Similalry
d13 ⊥ d24 ⇔→d 1 ×
→d 3⊥
→d 2 ×
→d 4⇔ (
→d 1 ×
→d 3) · (
→d 2 ×
→d 4) = 0
⇔
∣∣∣∣∣→d 1 ·
→d 2→d 1 ·
→d 4
→d 3 ·
→d 2→d 3 ·
→d 4
∣∣∣∣∣= 0⇔ (→d 1 ·
→d 2)(
→d 3 ·
→d 4) = (
→d 1 ·
→d 4)(
→d 3 ·
→d 2).
Therefore we have
(→d 1 ·
→d 3)(
→d 2 ·
→d 4) = (
→d 1 ·
→d 4)(
→d 2 ·
→d 3) = (
→d 1 ·
→d 2)(
→d 3 ·
→d 4),
which shows that
(→d 1 ·
→d 3)(
→d 2 ·
→d 4)− (
→d 1 ·
→d 2)(
→d 3 ·
→d 4) = 0⇔
∣∣∣∣∣→d 1 ·
→d 2→d 1 ·
→d 3
→d 4 ·
→d 2→d 4 ·
→d 3
∣∣∣∣∣= 0⇔ d14 ⊥ d23.
2. Find the distance from the point P(1,2,−1) to the straight line (d) x = y = z.Solution. According to the formula for the distance from one point to a given line wehave
δ (P,d) =‖→
OP×→d ‖
‖→d ‖
,
where O(0,0,0) ∈ d and→d (1,1,1) is a director vector of d. On the other hand ‖
→d ‖=√
12 +12 +12 =√
3 and
→OP×
→d=
∣∣∣∣∣∣∣→i→j→k
1 2 −11 1 1
∣∣∣∣∣∣∣= 3→i −2
→j −
→k=⇒‖
→OP×
→d ‖=
√14.
Thus
δ (P,d) =‖→
OP×→d ‖
‖→d ‖
=
√143.
3. Find the distance between the straight lines
(d1)x−1
2=
y+13
=z1, (d2)
x+13
=y4=
z−13
as well as the equations of the common perpendicular.

2
Solution. According to the formula for the distance between two lines we have
δ (d1,d2) =|(−→
A1A2,→d 1,
→d 2)|
‖→d 1 ×
→d 2 ‖
,
where A1(1,−1,0) ∈ d1, A2(−1,0,1) ∈ d2 and→d 1 (2,3,1),
→d 2 (3,4,3) are director vec-
tors of d1 and d2 respectively. On the other hand−→
A1A2 (−2,1,1) and
(−→
A1A2,→d 1,
→d 2) =
∣∣∣∣∣∣−2 1 1
2 3 13 4 3
∣∣∣∣∣∣=−18+8+3−9−6+8 =−14
→d 1×
→d 2=
∣∣∣∣∣∣∣→i→j→k
2 3 13 4 3
∣∣∣∣∣∣∣=∣∣∣∣ 3 14 3
∣∣∣∣→i + ∣∣∣∣ 1 23 3
∣∣∣∣→j + ∣∣∣∣ 2 33 4
∣∣∣∣→k= 5→i −3
→j −
→k=⇒‖
→d 1×
→d 2 ‖=
√35.
Thus
δ (d1,d2) =|(−→
A1A2,→d 1,
→d 2)|
‖→d 1 ×
→d 2 ‖
=14√35
.
The equations of the common perpendicular are
∣∣∣∣∣∣∣∣x−1 y+1 z−0
2 3 1∣∣∣∣ 3 14 3
∣∣∣∣ ∣∣∣∣ 1 23 3
∣∣∣∣ ∣∣∣∣ 2 33 4
∣∣∣∣∣∣∣∣∣∣∣∣= 0
∣∣∣∣∣∣∣∣x+1 y−0 z−1
3 4 3∣∣∣∣ 3 14 3
∣∣∣∣ ∣∣∣∣ 1 23 3
∣∣∣∣ ∣∣∣∣ 2 33 4
∣∣∣∣∣∣∣∣∣∣∣∣= 0
⇐⇒
∣∣∣∣∣∣x−1 y+1 z
2 3 15 −3 −1
∣∣∣∣∣∣= 0
∣∣∣∣∣∣x+1 y z−1
3 4 35 −3 −1
∣∣∣∣∣∣= 0
⇐⇒{
7(y+1)−21z = 05(x+1)−18y−29(z−1) = 0
⇐⇒{
y−3z+1 = 05x−18y−29z+29 = 0.
4. Find the distance between the straight lines M1M2 and d, where M1(−1,0,1), M2(−2,1,0)and
(d){
x + y + z = 12x − y − 5z = 0.
as well as the equations of the common perpendicular.Solution. According to the formula for the distance between two lines we have
δ (M1M2,d) =|(−→
M1A,−→
M1M2,→d )|
‖−→
M1M2 ×→d ‖
,

3
where A(3,−4,2) ∈ d and→d (−4,7,−3) is a director vector of d. On the other hand
−→M1M2 (−1,1,−1),
−→M1A (4,−4,1) and
(−→
M1A,−→
M1M2,→d ) =
∣∣∣∣∣∣4 −4 1−1 1 −1−4 7 −3
∣∣∣∣∣∣=−12−7−16+4+28+12 = 9
−→M1M2×
→d=
∣∣∣∣∣∣∣→i→j→k
−1 1 −1−4 7 −3
∣∣∣∣∣∣∣=∣∣∣∣ 1 −17 −3
∣∣∣∣→i − ∣∣∣∣−1 −1−4 −3
∣∣∣∣→j + ∣∣∣∣−1 1−4 7
∣∣∣∣→k= 4→i +
→j −3
→k=⇒‖
−→M1M2×
→d ‖=
√26.
Thus
δ (M1M2,d) =|(−→
M1A,−→
M1M2,→d )|
‖−→
M1M2 ×→d ‖
=9√26
.
The equations of the common perpendicular are
∣∣∣∣∣∣∣∣x+1 y−0 z−1−1 1 −1∣∣∣∣ 1 −1
7 −3
∣∣∣∣ ∣∣∣∣−1 −1−3 −4
∣∣∣∣ ∣∣∣∣−1 1−4 7
∣∣∣∣∣∣∣∣∣∣∣∣= 0
∣∣∣∣∣∣∣∣x−3 y+4 z−2−4 7 −3∣∣∣∣ 1 −1
7 −3
∣∣∣∣ ∣∣∣∣−1 −1−3 −4
∣∣∣∣ ∣∣∣∣−1 1−4 7
∣∣∣∣∣∣∣∣∣∣∣∣= 0
⇐⇒
∣∣∣∣∣∣x+1 y z−1−1 1 −14 1 −3
∣∣∣∣∣∣= 0
∣∣∣∣∣∣x−3 y+4 z−2−4 7 −34 1 −3
∣∣∣∣∣∣= 0
⇐⇒{−2(x+1)−7y−5(z−1) = 0−18(x−3)−24(y+4)−32(z−2) = 0
⇐⇒{
2x+7y+5z−3 = 09x+12y+16z−11 = 0.
5. If M(x,y) is a point of the tangent line TM0(E) of the ellipse E :x2
a2 +y2
b2 = 1 at one of
its points M0(x0,y0) ∈ E , show thatx2
a2 +y2
b2 ≥ 1.
Solution. Sincex0xa2 +
y0yb2 = 1 and
x20
a2+y2
0
b2 = 1, it follows that y= b2
y0
(1− x0x
a2
)and y2
0 =
b2(
1− x20
a2
)and thus
x2
a2 +y2
b2 =x2
a2 +1b2
b4
y20
(1− x0x
a2
)2=
x2
a2 +b2
y20
(1− x0x
a2
)2.
Therefore, the derivative of the function ϕ : R−→ R, ϕ(x) =x2
a2 +b2
y20
(1− x0x
a2
)2is
ϕ′(x)=
2xa2 +
2b2
y20
(1− x0x
a2
)(− x0
a2
)=
2xa2 −
2x0
(1− x0x
a2
)(
1− x20
a2
)a2
=2(x− x0)
a2(
1− x20
a2
) =2b2
a2y20(x−x0),
and thus ϕ ′(x0) = 0. Moreover x0 is the global minimum point of ϕ , namely ϕ(x) ≥
ϕ(x0) =x2
0
a2 +b2
y20
(1− x2
0a2
)2=
x20
a2 +y2
0
b2 = 1, for all x ∈ R.

4
6. If M(x,y) is a point of the tangent line TM0(H) of the hyperbola H :x2
a2−y2
b2 = 1 at one
of its points M0(x0,y0) ∈H , show thatx2
a2−y2
b2 ≥ 1.
Solution. Sincex0xa2 −
y0yb2 = 1 and
x20
a2−y2
0
b2 = 1, it follows that y= b2
y0
(x0xa2 −1
)and y2
0 =
b2(
x20
a2 −1)
and thus
x2
a2−y2
b2 =x2
a2−1b2
b4
y20
(x0xa2 −1
)2=
x2
a2−b2
y20
(1− x0x
a2
)2.
Therefore, the derivative of the function ψ : R−→ R, ψ(x) =x2
a2−b2
y20
(1− x0x
a2
)2is
ψ′(x)=
2xa2 −
2b2
y20
(1− x0x
a2
)(− x0
a2
)=
2xa2 +
2x0
(1− x0x
a2
)(
1− x20
a2
)a2
=2(x− x0)
a2(
1− x20
a2
) =2b2
a2y20(x0−x),
and thus ψ ′(x0) = 0. Moreover x0 is the global minimum point of ϕ , namely ψ(x) ≥
ϕ(x0) =x2
0
a2−b2
y20
(1− x2
0a2
)2=
x20
a2−y2
0
b2 = 1, for all x ∈ R.
7. Find the locus of the orthogonal projections of the center O(0,0) of the ellipse
E :x2
a2 +y2
b2 = 1
on its tangents.Solution. We shall show that the required locus LE is the curve
{(x,y) ∈ R2|(x2 + y2)2 = a2x2 +b2y2}\{(0,0)},
called the pedal curve of the ellipse.The equation of the tangent line Tx0,yo(E) of E at (x0,y0) ∈ E is x0x
a2 + y0yb2 = 1 and the
parametric equations of the perpendicular through O(0,0) on T(x0,y0)(E) are:{x(t) = x0
a2 ty(t) = y0
b2 t
Replacing x(t),y(t) within the equation of TM0(E) we get:
t = 1x20
a4 +y20
b4
and the coordinates of the orthogonal projection of O on TM0(E) are:x(t) = x0
a21
x20
a4 +y20
b4
y(t) = y0b2
1x20
b4 +y20
b4
In order to eliminate x0 and y0 in the above relations we observe that
x2 + y2 = 1x20
a4 +y20
b4
si a2x2 +b2y2 = 1(x20
a4 +y20
b4
)2

5
Thus
(x2 + y2)2 = a2x2 +b2y2.
Let us now consider (x1,y1) ∈R2, such that (x1,y1) 6= (0,0) si (x21 +y2
1)2 = a2x2
1 +b2y21.
It is easy to verify that the point
M(
a2x1x2
1+y21, b2y1
x21+y2
1
)belongs to the ellipse E as well as M1(x1,y1) is the orthogonal projection of O on thetangent to E at M, namely M1 belong to the associated locus of the ellipse E, whichcomplets the proof of the required equality.
8. Show that a ray of light through a focus of a parabola reflects to a ray parallel to the axisof the parabola (optical property of the parabola).Solution. Let F( p
2 ,0) be the focus of the parabola P : y2 = 2px and d : x = − p2 be its
director line. Recall that the gradient grad( f )(x0,y0) = ( fx(x0,y0), fy(x0,y0)) is a normalvector of parabola P to its point M0(x0,y0), where
f (x,y) = δ (F,M)−δ (M,d) =
√(x− p
2
)2+ y2−
(x+
p2
)
and M(x,y). Note that
fx(x0,y0) =x0− p
2δ (F,M0)
−1 and fy(x0,y0) =y0
δ (F,M0),
and shows that
grad( f ) = ( fx(x0,y0), fy(x0,y0)) =
(x0− p
2δ (F,M0)
−1,y0
δ (F,M0)
)=
(x0− p
2δ (F,M0)
,y0
δ (F,M0)
)− (1,0) =
−→FM0
δ (F,M0)−→i .
The versors
−→FM0
δ (F,M0)and−
→i point towards the ’exterior’ of the parabola P1 and their
sum make obviously equal angles with the directions of the vectors−→
FM0 and→i and (the
sum) is also orthogonal to the tangent line TM0(P) of the parabola at M0(x0,y0). Thisshows that the angle between the ray FM and the tangent line TM0(P) equals the anglebetween Ox and the tangent TM0(E ).
1 The exterior of a parabola is the nonconvex component of its complement

6
9. Find the locus of points in space equidistant to two given straight lines.Solution. We are going to splite the solution in two casses depending on whether the twogiven lines are coplanar or not. The coplanar case will be splited again in two subcassesdepending on whether the two lines are parallel or concurrent. In order to simplify thecalculations, a suitable orthonormal coordinate system will be considered in each situa-tion.The formula
δ (P,d) =‖−→A0P×
→d ‖
‖→d ‖
(0.1)
for the distance from one point P(xP ,yP ,zP) to a given line
(d)x− x0
p=
y− y0
q=
z− z0
r
will be intensively used. Note that the A0 stands for the point of d of coordinates(x0,y0,z0) and
→d is the director vector of d of coordinates (p,q,r).
(a) The two lines are coplanar.i. The two lines are parallel. In this situation we choose the line d1 to be the x-
axis and the y-axis a common perpendicular line. The z-axis is now determined.Thus the equations of the two lines are
(d1 = Ox){
y = 0z = 0 and (d2)
{y = az = 0.
In order to calculate the distance from one point M(x,y,z) to the lines d1 and d2
we shall use formula (0.1). The role of the vector→d can be played, both for d1
and d2, by the unit vector→i (1,0,0) and the role of A0 should be played by the
origine O(0,0,0) ∈ d1 when we compute the distance δ (M(x,y,z),d1) andby

7
the point A(0,a,0) ∈ d2 when we compute the distance δ (M(x,y,z),d2). Thus
δ (M(x,y,z),d1) =‖−→OM ×
→i ‖
‖→i ‖
= ‖−→OM ×
→i ‖
= ‖(x→i +y
→j +z
→k )×
→i ‖
= ‖x(→i ×
→i )+ y(
→j ×
→i )+ z(
→k ×
→i )‖
= ‖− y→k +z
→j ‖=
√y2 + z2.
Similarly
δ (M(x,y,z),d2) =‖−→AM ×
→i ‖
‖→i ‖
= ‖−→AM ×
→i ‖
= ‖(x→i +(y−a)
→j +z
→k )×
→i ‖
= ‖x(→i ×
→i )+(y−a)(
→j ×
→i )+ z(
→k ×
→i )‖
= ‖− (y−a)→k +z
→j ‖=
√(y−a)2 + z2.
Therefore we get successively:
M(x,y,z) ∈L ⇐⇒ δ (M(x,y,z),d1) = δ (M(x,y,z),d2)
⇐⇒√
y2 + z2 =√(y−a)2 + z2
⇐⇒ y2 + z2 = y2−2ay+a2 + z2
⇐⇒ y = a2 .
Thus, the required locus L , in this case, is the plane of equation y = a2 .
8
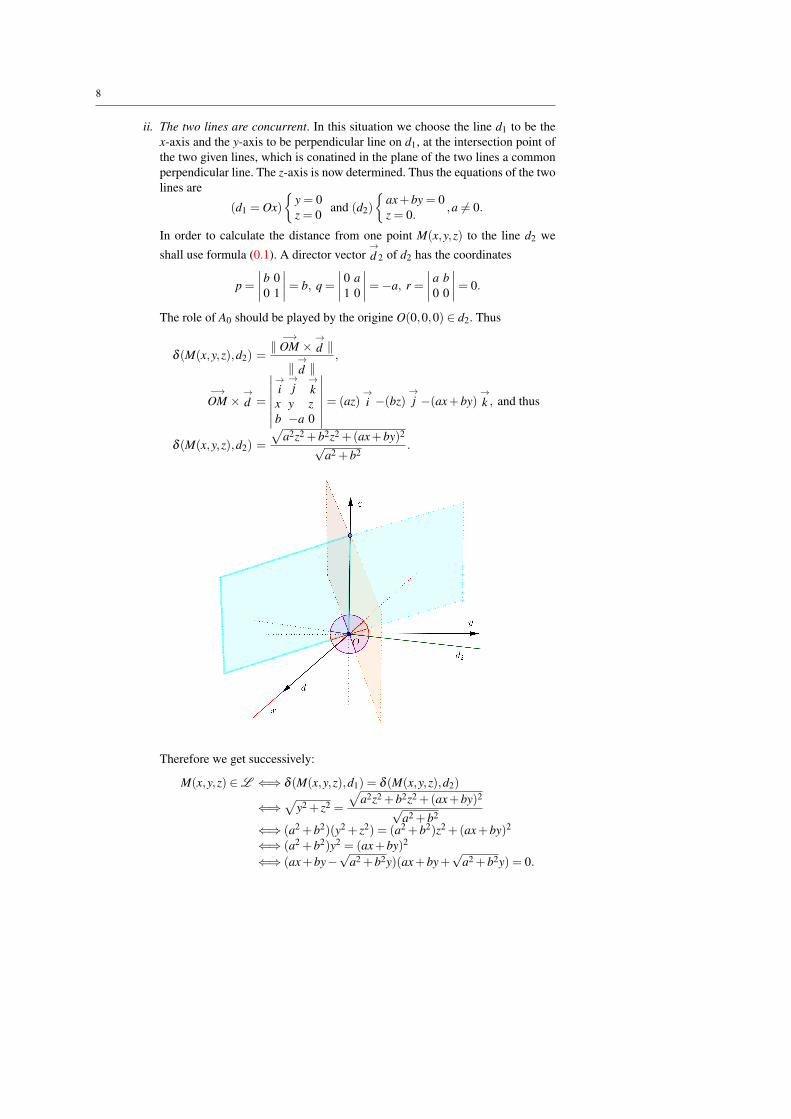
ii. The two lines are concurrent. In this situation we choose the line d1 to be thex-axis and the y-axis to be perpendicular line on d1, at the intersection point ofthe two given lines, which is conatined in the plane of the two lines a commonperpendicular line. The z-axis is now determined. Thus the equations of the twolines are
(d1 = Ox){
y = 0z = 0 and (d2)
{ax+by = 0z = 0. ,a 6= 0.
In order to calculate the distance from one point M(x,y,z) to the line d2 we
shall use formula (0.1). A director vector→d 2 of d2 has the coordinates
p =
∣∣∣∣ b 00 1
∣∣∣∣= b, q =
∣∣∣∣ 0 a1 0
∣∣∣∣=−a, r =∣∣∣∣ a b0 0
∣∣∣∣= 0.
The role of A0 should be played by the origine O(0,0,0) ∈ d2. Thus
δ (M(x,y,z),d2) =‖−→OM ×
→d ‖
‖→d ‖
,
−→OM ×
→d =
∣∣∣∣∣∣∣→i→j→k
x y zb −a 0
∣∣∣∣∣∣∣= (az)→i −(bz)
→j −(ax+by)
→k , and thus
δ (M(x,y,z),d2) =
√a2z2 +b2z2 +(ax+by)2
√a2 +b2
.
Therefore we get successively:
M(x,y,z) ∈L ⇐⇒ δ (M(x,y,z),d1) = δ (M(x,y,z),d2)
⇐⇒√
y2 + z2 =
√a2z2 +b2z2 +(ax+by)2
√a2 +b2
⇐⇒ (a2 +b2)(y2 + z2) = (a2 +b2)z2 +(ax+by)2
⇐⇒ (a2 +b2)y2 = (ax+by)2
⇐⇒ (ax+by−√
a2 +b2y)(ax+by+√
a2 +b2y) = 0.

9
Thus, the required locus L , in this case, is the union of the planes of equationsax+(b−
√a2 +b2)y = 0, ax+(b+
√a2 +b2)y = 0.
(b) The two lines are non-coplanar. In this case we choose the line d1 to be the x-axisand the z-axis to be the common perpendicular line of d1 and d2. The y-axis is nowdetermined. Thus the equations of the two lines are
(d1 = Ox){
y = 0z = 0 and (d2)
{ax+by = 0z = c.
,c 6= 0.
In order to calculate the distance from one point M(x,y,z) to the line d2 we shall use
formula (0.1). A director vector→d 2 of d2 has the coordinates
p =
∣∣∣∣ b 00 1
∣∣∣∣= b, q =
∣∣∣∣ 0 a1 0
∣∣∣∣=−a, r =∣∣∣∣ a b0 0
∣∣∣∣= 0.
The role of A0 should be played by the point C(0,0,c) ∈ d2. Thus
δ (M(x,y,z),d2) =‖−→CM ×
→d ‖
‖→d ‖
,
−→CM ×
→d =
∣∣∣∣∣∣∣→i→j→k
x y z− cb −a 0
∣∣∣∣∣∣∣= a(c− z)→i −b(c− z)
→j −(ax+by)
→k , and thus
δ (M(x,y,z),d2) =
√(a2 +b2)(z− c)2 +(ax+by)2
√a2 +b2
.
Therefore we get successively:
M(x,y,z) ∈L ⇐⇒ δ (M(x,y,z),d1) = δ (M(x,y,z),d2)
⇐⇒√
y2 + z2 =
√(a2 +b2)(z− c)2 +(ax+by)2
√a2 +b2
⇐⇒ (a2 +b2)(y2 + z2) = (a2 +b2)(z− c)2 +(ax+by)2
⇐⇒ (a2 +b2)(y2 + z2− (z− c)2) = (ax+by)2
⇐⇒ (z− z+ c)(z+ z− c) =(ax+by)2
a2 +b2 − y2
⇐⇒ 2c(z− c2 ) =
(ax+by)2
a2 +b2 − y2.
Thus, the required locus L , in this case, is the hyperbolic paraboloid of equation
2c(z− c2 ) =
(ax+by)2
a2 +b2 − y2.

10
10. Find the equation of the cylindrical surface generated by a variable straight line parallelto the line
(∆)
{x−3z = 0y+2z = 0 which is tangent to the surface (E ) 4x2 +3y2 +2z2 = 1.
Solution. We only need to select, out of the family
∆λ ,µ
{x−3z = λ
y+2z = µ,
those lines which are tangent to the ellipsoid
(E ) 4x2 +3y2 +2z2 = 1.
The tangency condition comes out of the equation
4(λ +3z)2 +3(µ−2z)2 +2z2−1 = 0⇔ 50z2 +12(2λ −µ)z+4λ2 +3µ
2−1 = 0
by imposing 36(2λ −µ)2−50(4λ 2 +3µ2−1) = 0, or equivalent,
18(2λ −µ)2−25(4λ2 +3µ
2−1) = 0.
The equation of the required cylindrical surface is
18(2x− y−8z)2 = 25(4(x−3z)2 +3(y+2z)2−1).
11. A disk of radius 1 is centered at the point A(1,0,2) and is parallel to the plane yOz. Asource of light is placed at the point P(0,0,3). Characterize analitically the shadow ofthe disk rushed over the plane xOy.Solution. Consider the conical surface of vertex P whose director curve is the circle ofradius 1 which is centered at the point A(1,0,2) and is parallel to the plane yOz. Theshadow of the disk rushed over the plane xOy is the convex component of the comple-ment, in the plane xOy, of the intersection curve between the plane xOy and the describedconical surface.

11
In order to find the equation of the conical surrface we consider the lines
(Oz){
x = 0y = 0 and (d)
{x = 0z = 3
as well as the family of lines
(∆λ µ)
{y−λx = 0z−3−µx = 0
depending on the parameters λ and µ of the reduced pencils of lines x−λy = 0 throughOz and z−3−µz = 0 through d.The circle C which borders the disk is given by the equations
(C)
{(x−1)2 + y2 +(z−2)2 = 1x = 1.
The intersection point of the line ∆λ µ with the plane of the circle is described by thesystem
x = 1y−λx = 0z−3−µx = 0
which has the solution
(∆λ µ ∩ (x = 1))
x = 1y = λ
z = 3+µ.(0.2)
By imposing the condition on the intersection point (0.2) to belong the other surfacewhich defines C, namely the sphere (x−1)2 + y2 +(z−2)2 = 1, we obtain the relationλ 2 +(µ +1)2 = 1, between λ and µ , in order to have concurrence between ∆λ µ and C.The equation of the conical surface is
(yx
)2+
(z−3
x+1)2
= 1, or y2 +(x+ z−3)2 = x2.
The latter equation is equivalent with
y2 + z2 +2xz−6x−6z+9 = 0.
Its intersection curve with the plane xOy is the parabola
(P
{z = 0y2−6x+9 = 0.
The convex compoennt of the compelment xOy\P coincides with the required shadowand is characterized by the following system{
y2−6x+9 ≤ 0z = 0.

12
12. Find the equation of the revolution surface generated by the rotation of a variable linethrough a fixed line.Solution. We are going to splite the solution in two casses depending on whether the twogiven lines are coplanar or not. The coplanar case will be splited again in two subcassesdepending on whether the two lines are parallel or concurrent. In order to simplify thecalculations, a suitable orthonormal coordinate system will be considered in each situa-tion.(a) The two lines are coplanar.
i. The two lines are parallel. We choose the coordinate reference system to havethe fixed line as the z-axis and a common perpendicular line as the x-axis. They-axis is now completely determined. The equations of the two lines are
(d1 = Oz){
x = 0y = 0 (d2)
{x = ay = 0.
Consider the family of circles
(Cλ µ)
{x2 + y2 + z2 = λ
z = µ
and determine the its intersection point with the halfplane of xOz in which theline d2 lies, by solving the system x2 + y2 + z2 = λ
z = µ
y = 0
for x,y and z in terms of λ and µ . This solution is
x =√
λ −µ2, y = 0, z = µ
and this intersection point meets the line d2 when x = a, namely λ −µ2 = a2.Thus, the equation of the revolution surface, in this case, is x2 + y2 = a2 andrepresents a circular cylinder.

13
ii. The two lines are concurrent. We choose the coordinate reference system tohave the fixed line as the z-axis and their common perpendicular line as the x-axis. The y-axis is now completely determined. The equations of the two linesare
(d1 = Oz){
x = 0y = 0 (d2)
{x = 0z = my.
Consider the family of circles
(Cλ µ)
{x2 + y2 + z2 = λ
z = µ
and determine the its intersection points with the coordinate plane yOz, by solv-ing the system
x = 0x2 + y2 + z2 = λ
z = µ
for x,y and z in terms of λ and µ . This solution is
x = 0, y =±√
λ −µ2, z = µ
and this intersection points meets the line d2 when z=my, namely µ2 = λ−µ2.Thus, the equation of the revolution surface, in this case, is x2 + y2 = z2 andrepresents a circular cone.

14
(b) The two lines are non-coplanar. We choose the coordinate reference system to havethe fixed line as the z-axis and their common perpendicular line as the x-axis. They-axis is now completely determined. The equations of the two lines are
(d1 = Oz){
x = 0y = 0 (d2)
{x = az = my.
Consider the family of circles
(Cλ µ)
{x2 + y2 + z2 = λ
z = µ
and determine the its intersection points with the plane x = a, by solving the systemx = ax2 + y2 + z2 = λ
z = µ
for x,y and z in terms of λ and µ . This solution is
x = a, y =±√
λ −µ2−a2, z = µ
and this intersection points meets the line d2 when z=my, namely µ2 = λ−µ2−a2.Thus, the equation of the revolution surface, in this case, is x2 + y2− z2 = a2 andrepresents a circular hyperboloiud of one sheet.
13. Find the homogeneous matrix of the product (concatenation) S(3,2)◦R 3π2
.Solution. The homogeneous matrix of the concatenation S(3,2)◦R 3π
2is
3 0 00 2 00 0 1
cos 3π
2 −sin 3π
2 0sin 3π
2 cos 3π
2 00 0 1
=
3 0 00 2 00 0 1
0 1 0−1 0 00 0 1
=
0 3 0−2 0 00 0 1
. (0.3)

15
14. Show that the concatenation (product) of two rotations, the first through an angle θ
about a point P(x0,y0) and the second about a point Q(x1,y1) (distinct from P) throughan angle −θ is a translation.Solution. The homogeneous matrix of the product (concatenation) R−θ (x1,y1)◦Rθ (x0,y0)is cosθ sinθ −x1 cosθ − y1 sinθ + x0−sinθ cosθ x1 sinθ − y1 cosθ + y0
0 0 1
cosθ −sinθ −x0 cosθ + y0 sinθ + x0sinθ cosθ −x0 sinθ − y0 cosθ + y0
0 0 1
=
1 0 −x0 +(x0− x1)cosθ +(y0− y1)sinθ + x10 1 −y0 +(x1− x0)sinθ +(y0− y1)cosθ + y10 0 1
,i.e. R−θ (x1,y1)◦Rθ (x0,y0) is the the translation T (h,k), where h=−x0+(x0−x1)cosθ +(y0− y1)sinθ + x1 and k =−y0 +(x1− x0)sinθ +(y0− y1)cosθ + y1.
15. Find the inverse of the product (concatenation) homogeneous transformation S(3,2) ◦R 3π
2.
Solution. The homogeneous matrix of the concatenation S(3,2) ◦R 3π2
is, according toQuestion 13, 0 3 0
−2 0 00 0 1
.Thus, the homogeneous matrix of the inverse transformation of S(3,2) ◦R 3π
2is the in-
verse of 0 3 0−2 0 00 0 1
,namely 0 − 1
2 013 0 00 0 1
.Alternatively, the homogeneous matrix of the of the inverse transformation of S(3,2) ◦R 3π
2is the homogeneous matrix of the transformation R−1
3π2◦S(3,2)−1 = R− 3π
2◦S( 1
3 ,12 ),
i.e. cos(−3π
2
)−sin
(−3π
2
)0
sin(−3π
2
)cos(−3π
2
)0
0 0 1
13 0 00 1
2 00 0 1
= (0.4)
=
0 −1 01 0 00 0 1
13 0 00 1
2 00 0 1
=
0 − 12 0
13 0 00 0 1
. (0.5)
References
1. Andrica, D., Topan, L., Analytic geometry, Cluj University Press, 2004.2. Galbura Gh., Rado, F., Geometrie, Editura didactica si pedagogica-Bucuresti, 1979.3. Pintea, C. Geometrie. Elemente de geometrie analitica. Elemente de geometrie diferentiala a curbelor si
suprafetelor, Presa Universitara Clujeana, 2001.

16
4. Rado, F., Orban, B., Groze, V., Vasiu, A., Culegere de Probleme de Geometrie, Lit. Univ. ”Babes-Bolyai”, Cluj-Napoca, 1979.
5. Tabachnikov, S., Geometry and Billiards, American Mathematical Society, 2005.