segmented permanent magnet synchronous …lipo.ece.wisc.edu/2015pubs/2015-34.pdfsegmented permanent...
TRANSCRIPT

Segmented Permanent Magnet Synchronous Machines for Wind Energy
Conversion System
Wenying Jiang' Patel B. Redd/ T.M. Jahns' T.A. Lipo'
[email protected] [email protected] [email protected] [email protected]
Ramasamy Anbarasu3 Henrik Lykke Sprensen4 Mohamed Osama 5 Martin V.R. Skov Jensen6
[email protected] [email protected] [email protected] [email protected]
, University of Wisconsin - Madison
Madison, WI USA
2 GE Global Research Center
Niskayuna, NY USA
3 GE Energy Power Conversion GmbH
Berlin, GERMANY
4 Consultant
Aarhus, DENMARK
5 GE Global Research Center
Munich, GERMANY
6 Vestas Wind Systems A/S
Aarhus, DENMARK
Abstract-Direct-drive generators are appealing candidates for some wind energy conversion systems (WECS) since they provide a means of eliminating the gearbox from the
drivetrain. However, a fundamental problem associated with
these machines is their large size that makes them difficult to
manufacture, transport, and assemble. This paper introduces the concept of segmented permanent magnet (PM) synchronous machines with both single and dual stator/rotor
layers that feature a modular structure which makes them
appealing candidates for use in direct-drive wind generators. To form a multi-phase machine, a spatial phase-shifting iron
piece is inserted between adjacent segments to maintain the
appropriate spatial positioning between phases. The
segmentation strategy for this type of machine is discussed, considering the trade-offs between average torque production
and torque ripple. A nine-phase segmented PM synchronous
machine configuration is proposed for reducing torque ripple
and improving fault-tolerance capabilities. The performance
characteristics of this segmented machine configuration are evaluated using finite element (FE) analysis.
I. INTRODUCTION
The wind turbine drivetrain including the generator plays a major role in determining the overall performance capabilities of a wind energy conversion system (WE CS). Because of the low rotating speed of the wind turbine, a stepup gearbox is generally applied to increase the generator shaft speed and reduce its mass and volume. Unfortunately, the adoption of a gearbox contributes vibration and noise, increases losses, and requires lubrication as well as regular maintenance. Therefore, direct-drive generators that eliminate the gearbox from the drivetrain have been receiving serious attention as candidates for WE CS applications [ 1-4]. These generators are generally characterized by large dimensions and mass, making them difficult to manufacture, transport, and assemble. As a result, segmented construction of direct-drive generators is of high interest [5].
Among various types of generators evaluated for use in low-speed applications, permanent magnet ( PM) machines
978-1-4799-5138-3/14/$31.00 ©2014 IEEE
are attractive candidates that offer several advantages including high efficiency and torque density. Although the price of rare-earth PM materials has been vulnerable to wide swings, PM synchronous generators continue to draw attention for use in large direct-drive wind turbines [6-8]. More specifically, surface-mounted PM machine configurations have been adopted in many investigations due to their high torque density and compatibility with large airgaps [ 1,4],
Optimization techniques are desired for this type of generator in order to improve their torque density and reduce the material cost. There are many different optimization algorithms used for the purpose of machine design optimization. Differential evolution (DE), particle swarm optimization ( PS O), and genetic algorithm (G A) are the three optlllllzation algorithms discussed most widely in publications [9- 12]. DE, PS O, and G A all fall into the class of population-based, stochastic function minimizers. As such, they are all well-suited for machine design optimization, which is a nonlinear and constrained problem involving both continuous and discrete variables.
Comparisons between DE and many other optimization algorithms have been reported in a recent study [ 13]. The results show that DE may not always be the fastest method, but it is usually the one that produces the best results, and there are frequent cases in which it is the fastest algorithm as well. Since DE is a population-based algorithm, it is suitable for adoption in a distributed parallel computing environment.
This paper introduces the concept of segmented permanent magnet ( PM) synchronous machines with three different stator-rotor arrangements: single-rotorlsingle-stator (SRSS), double-rotorlsingle-stator (DRSS), and single-rotor/doublestator (SRDS). Their modular structure makes them very suitable for application to direct-drive wind generators. To form a multi-phase machine, a phase-shift iron piece is inserted between adjacent segments to maintain the appropriate spatial pOSItioning between phases. The segmentation strategy for this type of machine is discussed,

! '\ PhaS9C/ \\\
/ ,
./ Phase a \
// "\\ Fig. 1: Segmented PM machine concept shown for three-phase machine
t Fig. 2: Developed view of one segment of SRSS PM machine
considering the trade-offs between torque production and torque ripple. A nine-phase segmented PM synchronous machine configuration is presented with the objectives of reducing torque ripple and improving the machine's fault tolerance capabilities. An optimal design has been developed with the objective of achieving high torque density and low magnet consumption, and its performance is evaluated using finite element (FE) analysis.
II. SEGMENTED PM SYNCHRONOUS MACHINE CONCEPT
The basic concept of a segmented PM synchronous machine is illustrated in Fig. 1, showing that the machine is evenly divided into 6 arc segments (or another multiple of three for three-phase machines). Each segment in a singlerotor single-stator (SRSS) arrangement (Fig. 2) is occupied by a single phase with uniformly-spaced teeth and slots. Its slot pitch equals the pole pitch, yielding the highest possible winding factor of unity that is a key to achieving high machine torque density. To form a three-phase machine, iron pieces with a span equivalent to 60 or 120 elec. degree spatial phase shift are added between adjacent phase segments in the stator [ 14].
On the rotor side, permanent magnets are mounted on the surface of the iron core. This rotor configuration has demonstrated appealing performance advantages including high efficiency, high torque density, low rotor losses, and compatibility with high airgap lengths [ 15]. For the stator, single-layer concentrated windings are wound around every second tooth providing a cost-effective design that eases stator fabrication, shortens end windings, increases the slot fill factor, and enhances the machine's fault tolerance
Fig. 3: Developed view of one segment of DRSS PM machine
Fig. 4: Developed view of one segment of SRDS PM machine
characteristics [ 16]. All of these features associated with the segmented PM synchronous machine make it a very suitable candidate for the direct-drive wind generator.
The segmented PM machine concept can be extended to machines with dual-stator or dual-rotor layers that have two airgaps that must be structurally maintained. The dual-layer segmented PM machine can be classified into two major types: the double-rotor/single-stator (DRSS) machine, and the single-rotor/double-stator (SRDS) machine. The basic stator-rotor configurations for one segment of these two machine types are presented in Figs. 3 and 4. It should be noted that the structure of each individual stator/rotor layer in both of these dual-layer machines is identical to that of the SRSS machine in Fig. 2.
For the DRSS machine (Fig. 3), the magnets are arranged so that the magnetic fluxes in the central stator yoke shared by both layers will cancel during normal operation, assuming that the dimensions and winding details in both layers are identical. This canceling effect makes the shared stator yoke electromagnetically inactive. As a result, the stator yoke thickness can be minimized or, in the limit, reduced to zero to minimize the machine active mass without interfering with its electromagnetic performance. However, the structural integrity of the stator must still be maintained. This same flux nulling feature can be designed into the central rotor yoke of the SRDS machine (Fig. 4), making it possible to reduce the yoke thickness and associated rotor mass.

TABLE l. SPECIFICATIONS FOR DIRECT-DRIVE WIND GENERATORS
Parameter/Metric Value Power Rating 6 MW
Corner Speed 11.3 r/min
Maximum Speed 15 r/min
Line-to-Line Voltage 690 Vrms
Airgap (Inner) Diameter 10 m
Stator Length <1 m
Airgap Thickness 10 mm
Current Density 4 Almm2
Copper Fill Factor 50%
Copper Resistivity 25 nQ-m @ 150 °C
Steel Laminations MI9,0.35 mm
NdFeB Magnet Remanent Aux Density 1.1 T @ 150 °C
Sintered NdFeB Magnet Resistivity 1.4 f.\Q-m
Maximum Excitation Frequency 150 Hz
Demagnetization Threshold > 3x rated current
Copper Density 8940 kg/m3
Steel Density 7850 kg/m3
Magnet Density 7450 kg/m3
Lamination Steel Price US$I/kg
Copper Price US$5/kg
NdFeB Magnet Price US$55/kg
Both of the airgaps in the two dual-layer machine configurations can develop the same shear force, contributing nearly the same amount of torque in both layers that differ only by the ratio of the two airgap radii. Therefore, the stack length of a dual-layer machine is approximately half that of a SRSS machine to satisfy an equivalent torque requirement, assuming that the dimensions are essentially the same in both stator-rotor layers and the sustainable current densities in the winding slots are the same for both the single- and dual-layer machines. The shortened stack length is beneficial to ease the mechanical stress associated with transporting and assembling this type of large machines.
The presence of two airgaps in the dual-layer machines offers both challenges and opportunities. Mechanically maintaining both airgaps requires special attention in the structural design, particularly if a cantilevered rotor design is adopted with bearings only on one axial end of the machine. However, the radial forces in the two airgaps cancel, simplifying the mechanical design task to some degree. Cogging torque can also be reduced by properly aligning the two stator-rotor layers [ 17, 18].
III. SEGMENTATION STRATEGY
A preliminary design for a single-phase SRSS segmented PM synchronous machine with 272 pole pairs has been developed according to the specifications listed in Table I for a direct-drive wind generator application. One pole-pair cross-section is shown in Fig. 5. For a single-phase machine, there is no need for any extra iron pieces in the stator for spatial phase shifting, resulting in an equal number of stator slots and rotor poles. The unity winding factor feature noted
Fig. 5: One segment (pole-pair) cross-section of a single-phase SRSS PM machine
50 100 150 200 250 300 350 Electrical Angle [degree]
Fig. 6: FE-predicted torque waveform of the single-phase SRSS PM machine @ 6 MW, 11.3 r/min
UO�te.C"l .. 1 O"Cl'""Spatlo'l Ph .. Shift
Fig. 7: Three-segment cross-section of a three-phase SRSS PM machine 6 Ox10
-1
-60�--�5�0--�1�00��1�5�0--�2�0�0--�2�5�0�-3�0�0��35:C:0 Electrical Angle [degree]
Fig. 8: FE-predicted torque waveform of the 3-phase SRSS PM machine @ 6 MW, 11.3 r/min

F
D c
40 E/�ctrical D�gru Phas�Shjft
(7 pole-pairs per phase-belt' 9 • 3) +(3 interstitial pole " 192 pole-pairs
Fig. 9: 9-phase segmented SRSS PM synchr. machine with 192 pole-pairs
earlier contributes to maximizing the torque production capability. However, this basic topology suffers from severe torque pulsations as evident in the torque waveform generated by FE analysis (Fig. 6).
Next, a preliminary design for a three-phase version of
the SRSS machine has been developed by inserting an iron
piece representing a 120 elec. degree spatial phase shift
between every adjacent slot/pole-pair (Fig. 7). The
dimensions of the rotor and stator slots are the same as for
the single-phase machine. This is an extreme design for
three-phase segmented PM machines since only 75% of the
stator circumference (i.e., the slots) is actively involved in
the electromechanical energy conversion process due to the
large number of passive phase-shifting segments. As a
result, the stack length of this three-phase machine is 42.5%
longer than the single-phase machine in order to meet the
torque production requirement. On the other hand, the
spatial phase shifting has significantly reduced the torque
pulsations to 9.6% (peak-to-peak) of the rated torque as
shown in Fig. 8.
There are many different ways to segment this type of machine, especially for the direct-drive wind turbine application where a high pole number is required to meet the high-torque, low-speed specifications. Adding spatial phaseshifting iron pieces into the stator generally leads to a reduction in average torque production, but an improvement in torque ripple. Proper selection of the number of phases and segments can reduce the torque ripple of the segmented PM machine to fall within an acceptable range while minimizing the loss in average torque production capability. This segmentation strategy also applies to the dual-layer segmented PM machines (DRSS and SRDS), for which each layer exhibits electromagnetic characteristics that are almost identical to those of the SRSS machine.
IV. NINE- PHASE SEGMENTED PM SYNCHRONOUS MACHINE
Multi-phase generators can offer a variety of advantages including low torque ripple, high fault tolerance, and reduced current and voltage stress on the switching devices.
Applications of this approach have typically been focused on machines with phase numbers that are multiples of three because of the prevalent use of three-phase converters. For this work, a nine-phase machine has been identified to be an appealing candidate for a segmented PM machine intended for a direct-drive wind application.
Taking practical issues associated with manufacturing and transporting this large machine into account, a nine-phase segmented PM synchronous machine with 192 pole-pairs has been investigated with the objectives of reducing the torque ripple and improving the machine's fault tolerance capabilities. The resulting machine configuration is summarized in Fig. 9 that shows one of the machine's phase segments. A dovetail tooth structure has been adopted to mechanically secure the 384 magnet pole pieces in place.
The stator is sliced into 27 segments, and each segment is approx. 1 m in arc circumference. In each segment, there are 7 active pole pairs ( 14 slots), together with a phase-shifting iron piece that provides a 40 elec. degree phase shift between adjacent stator segments. The phase shift is 180 elec. degrees between adjacent slots within each segment. Hence coil sides "+" and "-" form a single coil, corresponding to a singlelayer winding. All seven coils together form a single phase belt, as shown in Fig. 9. The slots are assumed to be fully open in this preliminary design.
The total number of active pole-pairs on the stator side is 7*27 = 189, while all of the interstitial phase shift iron pieces add up to 3 electromagnetically inactive pole-pairs (40 deg.*27/360 deg. = 3). Summing both the active and inactive parts together, there is the same number of polepairs on the stator and rotor, as required.
V. ApPLICATION OF OPTIMIZATION TECHNIQUES
A. Optimization Algorithm: Differential Evolution (DE)
The SRSS segmented PM synchronous machine with 192 pole-pairs has been designed using optimization techniques [ 19] to achieve high torque density and low material cost (i.e., low magnet mass). The implementation of FE analysis is based on the machine design optimization flow diagram presented in Fig. 10. The DE optimization algorithm written in M A TL A B provides the outer shell of the optimization program that governs the optimization process. It is a generation-based algorithm, so it provides the opportunity for parallel analysis of all designs within each generation. Through the stages of initialization, mutation, crossover, and selection, DE is explores the entire design space and locates the global optimum with high confidence [ 14]. Each of these stages is described brie fly as follows:
1. Initialization
( 1)
where x represents the vector of adjustable machine design variables. The subscript 0 represents the initial generation
(i.e., 9 = 0), j and i represent the /h parameter of the ith

Fig. 10: Flow chart of machine design optimization algorithm in high-throughput computing environment [19].
vector in the initial generation of variable vectors, rand is a random scalar number between ° and 1, and bL, bu are initialization lower- and upper-bound vectors, respectively.
2. Mutation
(2)
I h th · d hr n t e 9 generatlOn, Xro,g, Xn,g an Xr2,g are t ee
randomly selected vectors of machine design variables. The
mutant vector Vi,g is created by adding a scaled vector
difference to the new vector. The scale factor, F E (0,1 +), is an adjustable user-defined scalar variable that controls the rate at which the population evolves.
3. Crossover
U' = u.. = fVj,i,g if (randj(O,l) � Cr) r,g j,r,g t x· . otherwise. j,r,g
(3)
The trial vector Ui,g is assembled from parameter values
that have been copied from two different source vectors: the
mutant vector Vi,g and the current vector Xi,g' The crossover
probability, Cr E [0,1], is a user-defined value that controls the fraction of parameter values that are selected from the mutant vector.
4. Selection
X. = fUi,g if f(ui,g) � [(Xi,g) r,g+l t Xi,g otherwise.
(4)
A user-defined objective function f is used to evaluate performance metrics of all candidate designs. DE uses objective function results to formulate choices that determine
Fig. 11: Segmented PM machine design variables
TABLE II. SEGMENTED PM MACHINE VARIABLE DEFINITIONS AND RANGES
Variable Parameters Range Tooth Width to Rotor Pole Pitch Ratio [0.3,0.5]
Stator Yoke Thickness to Tooth Width Ratio [0.1,1]
Magnet Span to Rotor Pole Pitch Ratio [0.7,0.9]
Rotor Yoke Thickness to Rotor Pole Pitch Ratio [0.1,0.5]
Magnet Thickness to Airgap Thickness Ratio [1.1,3]
the next generation of designs. The design performance improves with each generation. Once the pre-specified termination criterion is satisfied, the iterative optimization process ends.
B. FE Analysis-based Machine Design Optimization
The optimization is implemented based on a single-phase SRSS segmented PM machine configured with 384 rotor poles, which can be easily extended to the nine-phase machine by inserting spatial phase-shifting iron pieces as discussed in Section IV. Each FE model for one pole-pair of a candidate SRSS segmented PM machine can be defined by a set of parameters, both fixed and varied. The fixed parameters are defined by the machine specifications listed in Table I. The five variable parameters are identified in Fig. 1 1, including the stator tooth width, stator yoke thickness,
magnet span ratio, rotor yoke thickness, and magnet thickness. The ranges for these variables, shown in Table II, are defined as ratios rather than absolute values in order to help ensure that each candidate design meets all of the geometric constraints. The range boundary values have been chosen to ensure that the optimum values fall within the allowable design space.
Next, all of the parameters in the parameter set are fed into the template Visual Basic (V B) script for FE analysis that contains information about the machine configuration, material, and excitation to create a specific script for each candidate design. The performance of each candidate design is evaluated when the current angle is aligned with the q-axis in order to achieve maximum torque per ampere (M T P A).
Ca!>el Case2
Case 3 Case 4 CueS
KXX)I/,\. KXX><l
� , x_x •• _
•• j( ••• )0<; )0<; � , ,
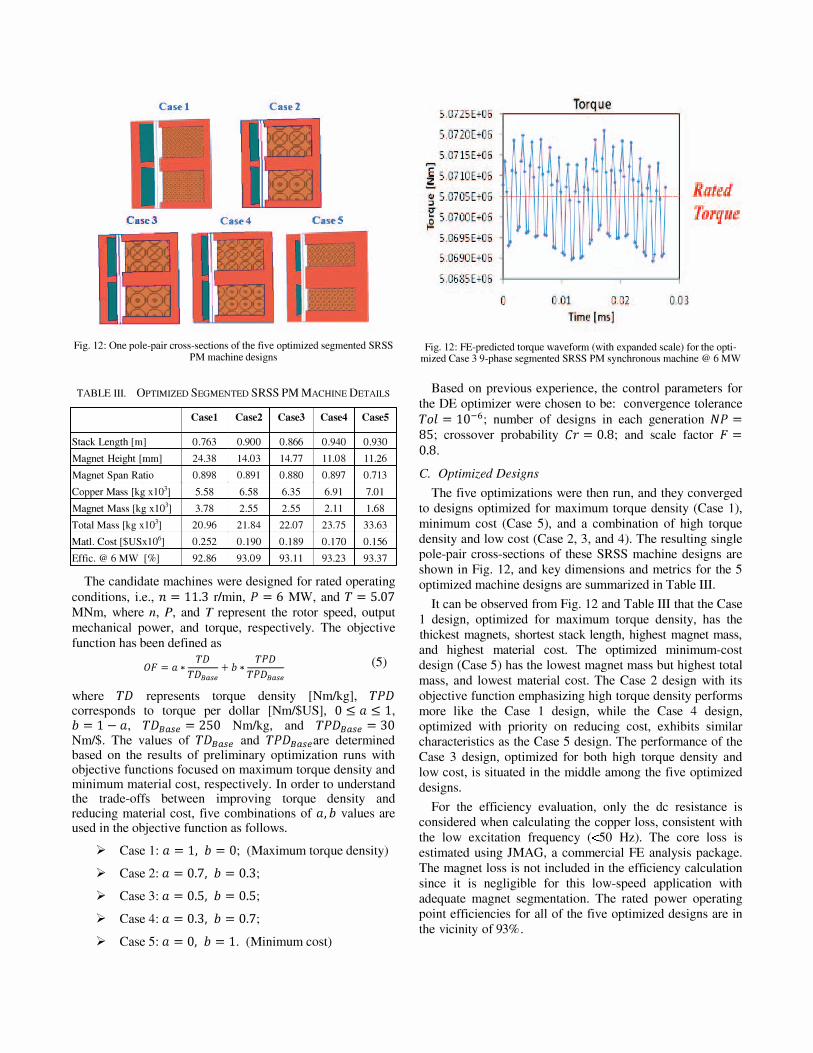
Fig. 12: One pole-pair cross-sections of the five optimized segmented SRSS PM machine designs
TABLE IlL OPTIMIZED SEGMENTED SRSS PM MACHlNE DETAILS
Case I Case2 Case3 Case4 CaseS
Stack Length [m] 0.763 0.900 0.866 0.940 0.930
Magnet Height [mm] 24.38 14.03 14.77 11.08 11.26
Magnet Span Ratio 0.898 0.891 0.880 0.897 0.713
Copper Mass [kg x 103] 5.58 6.58 6.35 6.91 7.01
Magnet Mass [kg x 103] 3.78 2.55 2.55 2.11 1.68
Total Mass [kg x 103] 20.96 21.84 22.07 23.75 33.63
MatI. Cost [$USx106] 0.252 0.190 0.189 0.170 0.156
Effie. @ 6 MW [ %] 92.86 93.09 93.11 93.23 93.37
The candidate machines were designed for rated operating conditions, i.e., n = 11.3 rlmin, P = 6 MW, and T = 5.07 M Nm, where n, P, and T represent the rotor speed, output mechanical power, and torque, respectively. The objective function has been defined as
TD TPD OF = a* -- +b* ---TDBase TPDBase
(5)
where TD represents torque density [ Nm/kg], TPD corresponds to torque per dollar [ Nm/$ US], O:s; a :s; 1, b = 1 - a, TDBase = 250 Nmlkg, and TPDBase = 30 Nrn/$. The values of TDBase and TPDBaSeare determined based on the results of preliminary optimization runs with objective functions focused on maximum torque density and minimum material cost, respectively. In order to understand the trade-offs between improving torque density and reducing material cost, five combinations of a, b values are used in the objective function as follows.
� Case 1: a = 1, b = 0; (Maximum torque density)
� Case 2: a = 0.7, b = 0.3;
� Case 3: a = 0.5, b = 0.5;
� Case 4: a = 0.3, b = 0.7;
� Case 5: a = 0, b = 1. (Minimum cost)
5 .0725 E "' 06
5 .0720 E.,.06
) .071S E+06
f 5 .0710E ... 06
� 5 .070:;E"'06 f;1 o 5 .0700E.,.06
F 5 . 069SE"' 06
5 . 0690E"-06
:' .068 3 E.,.06
o
Torque
001 0 . 02 Time Imsj
003
10' d _e.
IJrtJ .
Fig. 12: FE-predicted torque waveform (with expanded scale) for the optimized Case 3 9-phase segmented SRSS PM synchronous machine @ 6 MW
Based on previous experience, the control parameters for the DE optimizer were chosen to be: convergence tolerance Tal = 10-6; number of designs in each generation NP = 85; crossover probability Cr = 0.8; and scale factor F = 0.8.
C. Optimized Designs
The five optimizations were then run, and they converged to designs optimized for maximum torque density ( Case 1), minimum cost ( Case 5), and a combination of high torque density and low cost ( Case 2, 3, and 4). The resulting single pole-pair cross-sections of these SRSS machine designs are shown in Fig. 12, and key dimensions and metrics for the 5 optimized machine designs are summarized in Table III.
It can be observed from Fig. 12 and Table III that the Case 1 design, optimized for maximum torque density, has the thickest magnets, shortest stack length, highest magnet mass, and highest material cost. The optimized minimum-cost design ( Case 5) has the lowest magnet mass but highest total mass, and lowest material cost. The Case 2 design with its objective function emphasizing high torque density performs more like the Case 1 design, while the Case 4 design, optimized with priority on reducing cost, exhibits similar characteristics as the Case 5 design. The performance of the Case 3 design, optimized for both high torque density and low cost, is situated in the middle among the five optimized designs.
For the efficiency evaluation, only the dc resistance is considered when calculating the copper loss, consistent with the low excitation frequency «50 Hz). The core loss is estimated using JM AG, a commercial FE analysis package. The magnet loss is not included in the efficiency calculation since it is negligible for this low-speed application with adequate magnet segmentation. The rated power operating point efficiencies for all of the five optimized designs are in the vicinity of 93%.

1.5 --Normalized Current -Normalized Voltage
(],I 1.0 tlO ttl ...... g 0.5 ....... ...... c � .... 0.0 ::J
U "0 (],I .!::! -0.5 ttl E .... 0
Z -1.0
-1.5
Fig. 13: FE-calculated nonnalized phase current and voltage waveforms of the nine-phase segmented PM machine under rated operation
0.8
�06 E � <'30.4
0.2
10
Normalized Current
20 Harmonic
30 40
Fig. l4: Harmonic spectrum of the FE-calculated nonnalized phase current during rated power operation at 6 kW with sinusoidal current excitation.
Normalized Voltage 0.9n=---�---�---�-------'
0.8
0.7
0.6 � '" 0.5 0) '" '604 >
0.3
0.2
0.1 _I. 0�0��--�10�--uu--2�Ouu----�30�--uu�40
Harmonic
Fig. 15: Harmonic spectrum of the FE-calculated normalized phase voltage during rated power operation at 6 kW with sinusoidal current excitation.
VI. PERFORMANCE CHARACTERISTICS OF THE NINE-PHASE
SEGMENTED PM SYNCHRONOUS MACHINE
A FE machine model that includes all nine phase windings and spatial phase-shifting between the adjacent phase belts has been assembled based on the dimensions of the optimized Case 3 design, leading to the configuration shown
:B [TI flux Dens ity Vectors 1.2 with 3xR a te d C u r rent 2.0 Applied along 1.8 eg ative d-A)(is 1. 6 U 1.2 1.0 0.8 0.15 0. 4 0.2 0.0
Fig. 16: FE-calculated flux density contour plot inside one rotor pole magnet for the nine-phase segmented PM machine with 3 x rated current applied
along the negative d-axis
in Fig. 9. This model has been used by the FE analysis software to evaluate the performance characteristics of the nine-phase segmented SRSS PM synchronous machine under the assumption of balanced nine-phase sinusoidal current excitation.
A. Torque Ripple
The torque waveform of this machine has been analyzed under rated operating conditions, as shown in Fig. 12. The peak-to peak torque ripple is less than 0.07% of the rated torque. The negligible torque ripple is one of the appealing features of this nine-phase segmented PM synchronous machine configuration.
B. Harmonic Spectra and Power Factor
Figure 13 shows the normalized phase current and phase voltage waveforms of the nine-phase segmented PM
machine under rated operation. The voltage waveform was obtained by placing voltage probes at winding terminals in the FE model. The harmonic spectrums of the two waveforms have been analyzed using the Fast Fourier Transform (FF T) as shown in Fig. 14 and 15.
Since the current waveforms are assumed to be ideally sinusoidal, only the fundamental component is evident in the current waveform harmonic spectrum (Fig. 14). In contrast, the presence of the third and fifth harmonics in the phase voltage waveform (Fig. 15) has a degrading impact on the machine's terminal power factor. The fundamental current
vector lags the fundamental voltage vector by 47.3°, leading to a low displacement power factor of 0.67. The impact of end winding leakage inductance is not considered in this power factor calculation. Identifying techniques for improving the machine's power factor is an important topic for future investigation.
C. Demagnetization
The flux densities in the magnets of the nine-phase segmented PM machine have been evaluated by applying three times the rated current applied along the negative d-

axis in order to examine the machine's demagnetization characteristics. The resulting flux density color contour plot inside one of the rotor pole magnets is presented in Fig. 16. The lowest magnet flux density inside the bulk magnet is 0.4 T, indicating there is no sign of demagnetization under this operating condition.
It can also be observed in Fig. 16 that the magnet regions closest to airgap experience higher demagnetization effects compared to bulk magnet material that is far away from the airgap. The demagnetization risk for this machine configuration is relatively low, consistent with the large airgap that provides a level of protection.
VII. CONCLUSIONS
This paper introduces the concept of segmented permanent magnet (PM) machines with both a single-statorlsingle-rotor configuration and dual stator or dual rotor layers, highlighting their modular structure that makes them very suitable for application in the direct-drive wind generators. Multiple-phase segmented machines can be constructed by inserting spatial phase-shifting iron pieces among the stator segments. The proper selection of the phase number and segment number helps to suppress the machine's torque ripple while minimizing the loss in average torque production.
A nine-phase segmented PM synchronous machine configuration has been proposed with the objectives of reducing the torque ripple and improving the machine fault tolerance capabilities. Five segmented PM machine designs have been optimized for maximum torque density, minimum material cost (magnet mass), and combinations of both objectives, using an iterative FE-based machine design optimization algorithm based on differential evolution.
Finite element analysis results demonstrate that this machine configuration is capable of developing high average torque with low torque ripple, while exhibiting low vulnerability to demagnetization. These promising results confirm that segmented PM machines offer attractive features for direct-drive wind turbine generators and other applications requiring high torque at low speeds.
ACKNOWLEDGMENTS
The authors are grateful to Vestas Wind Systems for providing financial support, and also to JS OL Corp. and Infolytica Corp. for making their finite element analysis packages available for this investigation.
REFERENCES
[I] H. Juang, C. Lee, S. Hahn, S. Jung, "Optimal design of direct-driven PM wind generator applying parallel computing genetic algorithm," in Proc. of 2007 IEEE IntI. Conference on Electrical Machines (ICEM 2007), pp. 763-768.
[2] F. Wang, Y. Zhang, Y. Shen, "Comparison of different structures of variable speed constant frequency wind power generator," in Proc. of
2008 IEEE 18th International Conference on Electrical Machines
(ICEM 2008), pp. 2234-2238. [3] J. Kang, Z. Zhang, Y. Lang, "Development and trend of wind power
in China," in Proc. of 2007 IEEE Electrical Power Conference (EPC 2007), pp. 330-335.
[4] Y. Chen, P. Pillay, A. Khan, "PM wind generator comparison of different topologies," in Proc. of 2004 IEEE 39th lAS Annual Meeting (lAS '04), pp. 1405-1412.
[5] J. Tapia, J. Pyrhonen, J. Puranen, S. Nyman, P. Lindh, "Optimal design of large permanent magnet synchronous generators," Magnetics, IEEE Transactions. Vol. 49, Issue I, pp. 642-650, Jan. 2013.
[6] K. Cheng, J. Lin, Y. Bao, X. Xue, "Review of the wind energy generating system," in Proc. of 2009 8th International Conference on
Advances in Power System Control, Operation and Management (APSCOM 2009), pp. 1-7.
[7] L. Li, Z. Chen, H. Polinder, "Optimization of multibrid permanentmagnet wind generator systems," Energy Conversion, IEEE Transactions. Vol. 24, Issue I, pp. 82-92, Mar. 2009.
[8] S. Saleh, M. Khan, M. Rahman, "Steady-state performance analysis and modelling of directly driven interior permanent magnet wind generators," Renewable Power Generation, lET Transactions. Vol. 5, Issue 2, pp. 137-147,2011.
[9] G. Sizov, P.Zhang, D. lonel, N. Demerdash, M.Rosu, "Automated biobjective design optimization of multi-MW direct-drive PM machines using CE-FEA and differential evolution," in Proc. of 2011 IEEE
Energy Conversion Congress and Exposition (ECCE 2011), Phoenix, pp. 3672-3678.
[10] R. Bhuvaneswar, V.P. Sakthivel, S. Subramanian, G.T. Bellarmine, "Hybrid approach using GA and PSO for alternator design," in Proc. of 2009 IEEE Southeastcon Conference, pp. 169-174.
[II] D. Ilea, M.M. Radulescu, F. Gillon, P. Brochet, "Multi-objective optimization of a switched reluctance motor for light electric traction applications," in Proc. of 2010 IEEE Vehicle Power and Propulsion
Conference (VPPC 2010), Lille, pp.I -6.
[12] Y. Duan, D.M. lonel, "A review of recent development in electrical machine design optimization method with a permanent magnet synchronous motor benchmark study," in Proc. of 2011 IEEE Energy Conversion Congress and Exposition (ECCE 2011).Phoenix, pp. 3694-3701.
[13] K. Price, R. Storn, J. Lampinen, Differential Evolution: A Practical Approach to Global Optimization. Springer, 2005.
[14] Y. Chen, Z. Du, W. Zhong, L. Kong, "Modular stator structure permanent magnet synchronous machine," in Proc. of 2008 World Automation Congress (WAC2008), pp. 1-5.
[15] B. Boazzo, G. Pellegrino, A. Vagati, "Multipolar SPM machines for direct-drive application: a general design approach," Industry
Applications, IEEE Transactions. Vol. 50, Issue 1, pp. 327-337, Jan. 2014.
[16] A. EI-Refaie, T.M. Jahns, "Impact of winding layer number and magnet type on synchronous surface PM machine designed for wide constant-power speed range operation," Energy Conversion, IEEE
Transactions. Vol. 23, Issue 1, pp. 53-60, Mar. 2008. [17] J. Xia, T. Dong, C. Wang, "The series structure dual-rotor PMSM
design based on phase-shifting winding," in Proc. of 2008 IEEE
International Conference on Electrical Machines and Systems (ICEMS2008), pp. 3228-3231.
[18] X. Sun, M. Cheng, L. Xu, W. Hua, "A novel dual power flow wind power generation system," in Proc. of 2008 IEEE International Conference on Electrical Machines and Systems (ICEMS2008), pp. 2573-2578.
[19] W. Jiang, T.M. Jahns, T.A. Lipo, W. Taylor, Y. Suzuki, "Machine design optimization based on finite element analysis in a highthroughput computing environment," in Proc. of 2012 IEEE Energy Conversion Congress and Exposition, pp. 869-876.