search and rescue, and mathematics - tucson high magnet · pdf filesearch and rescue, and...
TRANSCRIPT

Search And Rescue, and MathematicsTucson High Magnet School
Eric JohnsonDavid Lovelock
Search And Rescue Unit, Pima County Sheriff’s DepartmentDepartment of Mathematics, University of Arizona
November 24, 2009
Eric Johnson David Lovelock Search And Rescue, and Mathematics

Part 1
Search And Rescue
Eric Johnson
Eric Johnson David Lovelock Search And Rescue, and Mathematics

Arizona Search And Rescue
In the state of Arizona the law requires that the Sheriff ofeach of the fifteen counties is responsible for Search andRescue (SAR).The Arizona Department of Emergency Management andMilitary Affairs (ADEMA) by direction of the Governor’sOffice supports SAR operations in the State.ADEMA provides reimbursement of eligible missionexpenses like fuel for DPS Ranger (a helicopter) andWorkman’s Compensation coverage for the Sheriff’s SARvolunteers.
Other states have their own requirements.
Eric Johnson David Lovelock Search And Rescue, and Mathematics

Pima County Search And Rescue Coordinators
SO OTHERS MAY LIVE
Responsibilities:To coordinate and conduct search and rescue operationsin Pima County or in the state of Arizona in compliancewith statutory requirements of Arizona.To coordinate trained volunteers in search and rescueoperations.
Eric Johnson David Lovelock Search And Rescue, and Mathematics
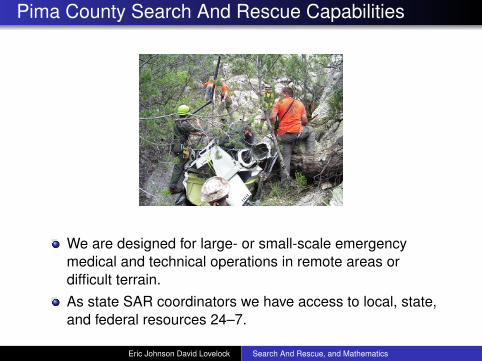
Pima County Search And Rescue Capabilities
We are designed for large- or small-scale emergencymedical and technical operations in remote areas ordifficult terrain.As state SAR coordinators we have access to local, state,and federal resources 24–7.
Eric Johnson David Lovelock Search And Rescue, and Mathematics

Pima County SAR Coordinators’ Qualifications AndTraining
Emergency Medical Technicians.Trained to deal with remote wilderness injuries.Incident Commanders.Search Managers.Search and Recovery Divers.Technical Rope Rescue.Tactical trackers (used to search for criminals).Ham Radio Operators.
At least one Pima County SAR Coordinator is on duty at alltimes.
Eric Johnson David Lovelock Search And Rescue, and Mathematics

Pima County SAR Equipment - Vehicles
Eric Johnson David Lovelock Search And Rescue, and Mathematics

Pima County SAR Equipment - Vehicles
Eric Johnson David Lovelock Search And Rescue, and Mathematics

Pima County SAR Equipment - Air Support
Eric Johnson David Lovelock Search And Rescue, and Mathematics

Pima County SAR Equipment - Air Support
Eric Johnson David Lovelock Search And Rescue, and Mathematics

Pima County SAR Equipment - Technical Gear
Eric Johnson David Lovelock Search And Rescue, and Mathematics

Pima County SAR Equipment - Technical Gear
Eric Johnson David Lovelock Search And Rescue, and Mathematics

Search And Rescue
Pima SAR conducted over 140 missions last year. Thehighest percent of total missions in Arizona.Today we are talking about searches.
Eric Johnson David Lovelock Search And Rescue, and Mathematics

Search And Rescue
What is the difference between a search and a rescue?
Search: We don’t know where the subject is, and need tolook for him/her.Rescue: We know where the subject is, and he/she needshelp.
A search can sometimes lead to a rescue.
Eric Johnson David Lovelock Search And Rescue, and Mathematics

Who Do We Search For?
The LostThey usually self report.They lost the trail or tried to take a short cut.They want to be found.
Eric Johnson David Lovelock Search And Rescue, and Mathematics

Who Do We Search For?
The OverdueUsually reported by family or friends.Most leave an itinerary or the reporting party can give us astarting point.They want to be found.
Eric Johnson David Lovelock Search And Rescue, and Mathematics

Who Do We Search For?
The EndangeredMemory impaired.Children.Subjects who are unable to care for themselves.They may not know or understand we are looking for them.
Eric Johnson David Lovelock Search And Rescue, and Mathematics

Who Do We Search For?
AircraftIf they don’t make their destination a search is started.A PLB hit is received. PLB = personal locating device.Large search area.
Eric Johnson David Lovelock Search And Rescue, and Mathematics

Who Do We Search For?
CriminalsEscapees.Fleeing suspects.Anyone who would pose a danger to the public.They don’t want to be found.
We do not use volunteers on these missions.
Eric Johnson David Lovelock Search And Rescue, and Mathematics

How Do We Search?
Eric Johnson David Lovelock Search And Rescue, and Mathematics

How Do We Search?
Eric Johnson David Lovelock Search And Rescue, and Mathematics

How Do We Search?
Eric Johnson David Lovelock Search And Rescue, and Mathematics

How Do We Search?
Eric Johnson David Lovelock Search And Rescue, and Mathematics

Resources For Searching
Volunteers.Local Agencies (Fire Departments, Police Departments).County Agencies (SAR Coordinators from other counties).State Agencies (Department of Public Safety, Departmentof Emergency Management).Federal Agencies (Border Patrol, FBI).The Military.
Eric Johnson David Lovelock Search And Rescue, and Mathematics
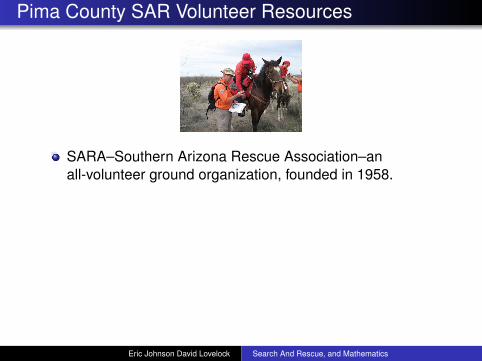
Pima County SAR Volunteer Resources
SARA–Southern Arizona Rescue Association–anall-volunteer ground organization, founded in 1958.
Pima County Sheriff’s Posse, an all-volunteer mountedunit, founded in 1946.SRDI–Southwest Rescue Dogs–an all-volunteer K-9search and rescue organization.Pima County Search & Recovery Divers.Civil Air Patrol.
NO COST TO THE CUSTOMER
For more details, go to SARCI.ORG on the web.
Eric Johnson David Lovelock Search And Rescue, and Mathematics

Pima County SAR Volunteer Resources
SARA–Southern Arizona Rescue Association–anall-volunteer ground organization, founded in 1958.Pima County Sheriff’s Posse, an all-volunteer mountedunit, founded in 1946.
SRDI–Southwest Rescue Dogs–an all-volunteer K-9search and rescue organization.Pima County Search & Recovery Divers.Civil Air Patrol.
NO COST TO THE CUSTOMER
For more details, go to SARCI.ORG on the web.
Eric Johnson David Lovelock Search And Rescue, and Mathematics
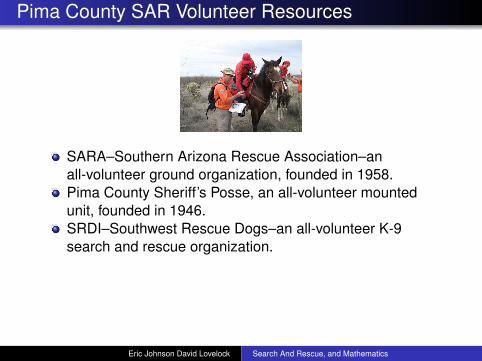
Pima County SAR Volunteer Resources
SARA–Southern Arizona Rescue Association–anall-volunteer ground organization, founded in 1958.Pima County Sheriff’s Posse, an all-volunteer mountedunit, founded in 1946.SRDI–Southwest Rescue Dogs–an all-volunteer K-9search and rescue organization.
Pima County Search & Recovery Divers.Civil Air Patrol.
NO COST TO THE CUSTOMER
For more details, go to SARCI.ORG on the web.
Eric Johnson David Lovelock Search And Rescue, and Mathematics

Pima County SAR Volunteer Resources
SARA–Southern Arizona Rescue Association–anall-volunteer ground organization, founded in 1958.Pima County Sheriff’s Posse, an all-volunteer mountedunit, founded in 1946.SRDI–Southwest Rescue Dogs–an all-volunteer K-9search and rescue organization.Pima County Search & Recovery Divers.
Civil Air Patrol.
NO COST TO THE CUSTOMER
For more details, go to SARCI.ORG on the web.
Eric Johnson David Lovelock Search And Rescue, and Mathematics

Pima County SAR Volunteer Resources
SARA–Southern Arizona Rescue Association–anall-volunteer ground organization, founded in 1958.Pima County Sheriff’s Posse, an all-volunteer mountedunit, founded in 1946.SRDI–Southwest Rescue Dogs–an all-volunteer K-9search and rescue organization.Pima County Search & Recovery Divers.Civil Air Patrol.
NO COST TO THE CUSTOMER
For more details, go to SARCI.ORG on the web.
Eric Johnson David Lovelock Search And Rescue, and Mathematics

Pima County SAR Volunteer Resources
SARA–Southern Arizona Rescue Association–anall-volunteer ground organization, founded in 1958.Pima County Sheriff’s Posse, an all-volunteer mountedunit, founded in 1946.SRDI–Southwest Rescue Dogs–an all-volunteer K-9search and rescue organization.Pima County Search & Recovery Divers.Civil Air Patrol.
NO COST TO THE CUSTOMER
For more details, go to SARCI.ORG on the web.
Eric Johnson David Lovelock Search And Rescue, and Mathematics

Pima County SAR Volunteer Resources
SARA–Southern Arizona Rescue Association–anall-volunteer ground organization, founded in 1958.Pima County Sheriff’s Posse, an all-volunteer mountedunit, founded in 1946.SRDI–Southwest Rescue Dogs–an all-volunteer K-9search and rescue organization.Pima County Search & Recovery Divers.Civil Air Patrol.
NO COST TO THE CUSTOMER
For more details, go to SARCI.ORG on the web.Eric Johnson David Lovelock Search And Rescue, and Mathematics

What To Do If You Get Lost
Stop. Try to remember your way back.If you cannot remember STAY where you are and wait forsomeone to find you.Don’t panic. Remember that people will be looking for you.Draw or make big signs on the ground to help people findyou.Call out and signal for help.
Read the yellow handout from Southern Arizona RescueAssociation.
Eric Johnson David Lovelock Search And Rescue, and Mathematics

Search And Rescue
What do we use to find missing subjects?
Resources and Mathematics.
Eric Johnson David Lovelock Search And Rescue, and Mathematics

Search And Rescue
What do we use to find missing subjects?
Resources and
Mathematics.
Eric Johnson David Lovelock Search And Rescue, and Mathematics

Search And Rescue
What do we use to find missing subjects?
Resources and Mathematics.
Eric Johnson David Lovelock Search And Rescue, and Mathematics

Part 2
SAR, and Mathematics
David Lovelock
Eric Johnson David Lovelock Search And Rescue, and Mathematics

Three Stages To A Search
There are three stages to a search:
Stage 1. Short-term, small-scale searches, usually calledhasty searches. Most searches do not go beyond thisstage.Stage 2. Taking a consensus.Stage 3. Long-term, large-scale searches.
Eric Johnson David Lovelock Search And Rescue, and Mathematics

Short-term, Small-scale Searches
A small-scale search usually involvesSubject reported missing after a short time.A few local resources (SAR volunteers) and only a fewagencies involved (one sheriff’s department).Subject may be moving or stationary.Search trails and locations.A little mathematics, but mostly experience and instinct.A quick resolution.The press, but usually not on front page.
Eric Johnson David Lovelock Search And Rescue, and Mathematics

Short-term, Small-scale Searches
Eric Johnson David Lovelock Search And Rescue, and Mathematics

Mathematics and Small-scale Searches
Primarily definitions, data gathering, and statistics.
Lost Person Behavior: Subjects divided into groups.Within each group, distance traveled.
Eric Johnson David Lovelock Search And Rescue, and Mathematics

Definitions
PLS. Point Last Seen. The place where the subject waslast seen. For example, subject dropped off at trailhead,last seen by driver.LKP. Last Known Position. The place where the subjectwas last known to be, but was not seen. Example,subject’s vehicle found at trailhead.
When the search first starts, one of these two will be thestarting point of the search.Note: The PLS or LKP could change as the search progresses.What does not change is the
IPP. Initial Planning Point. The first PLS or LKP. This is thepoint from which Lost Person Behavior statistics aredeveloped.
Eric Johnson David Lovelock Search And Rescue, and Mathematics

Definitions
PLS. Point Last Seen. The place where the subject waslast seen. For example, subject dropped off at trailhead,last seen by driver.LKP. Last Known Position. The place where the subjectwas last known to be, but was not seen. Example,subject’s vehicle found at trailhead.
When the search first starts, one of these two will be thestarting point of the search.
Note: The PLS or LKP could change as the search progresses.What does not change is the
IPP. Initial Planning Point. The first PLS or LKP. This is thepoint from which Lost Person Behavior statistics aredeveloped.
Eric Johnson David Lovelock Search And Rescue, and Mathematics

Definitions
PLS. Point Last Seen. The place where the subject waslast seen. For example, subject dropped off at trailhead,last seen by driver.LKP. Last Known Position. The place where the subjectwas last known to be, but was not seen. Example,subject’s vehicle found at trailhead.
When the search first starts, one of these two will be thestarting point of the search.Note: The PLS or LKP could change as the search progresses.
What does not change is the
IPP. Initial Planning Point. The first PLS or LKP. This is thepoint from which Lost Person Behavior statistics aredeveloped.
Eric Johnson David Lovelock Search And Rescue, and Mathematics

Definitions
PLS. Point Last Seen. The place where the subject waslast seen. For example, subject dropped off at trailhead,last seen by driver.LKP. Last Known Position. The place where the subjectwas last known to be, but was not seen. Example,subject’s vehicle found at trailhead.
When the search first starts, one of these two will be thestarting point of the search.Note: The PLS or LKP could change as the search progresses.What does not change is the
IPP. Initial Planning Point. The first PLS or LKP. This is thepoint from which Lost Person Behavior statistics aredeveloped.
Eric Johnson David Lovelock Search And Rescue, and Mathematics

The Search Area
Eric Johnson David Lovelock Search And Rescue, and Mathematics

Lost Person Behavior Groups
Children (1 to 3 years)Children (4 to 6 years)Children (7 to 12 years)Youths (13 to 15 years)DespondentsElderlyHikersHuntersMiscellaneousFishermenClimbersSkiersWalkaways
Eric Johnson David Lovelock Search And Rescue, and Mathematics

Children (1 to 3 years)
They are unaware of the concept of being “lost”. They oftenseek out the most convenient location to lie down and go tosleep:
Inside a log.Under a thick bush.Under an overhanging rock.Under a picnic table.Inside an automobile trunk.Inside an abandoned appliance.
They are almost always very difficult to detect, as they arefrequently out of sight and will rarely answer searchers’ calls.
Children (all ages) are rarely able to find their own way out ofthe woods.
Eric Johnson David Lovelock Search And Rescue, and Mathematics

Youths (13 to 15 years)
Frequently become lost in groups of two or more people, whileengaged in exploring or some other “adventuring” activity.When in groups, they will rarely travel very far. They will usuallyrespond to searchers’ calls. They often resort to directionsampling, looking for some familiar place or landmark.
Statistical data:60% of the cases involved 2 or more missing subjects.All subjects survived.Only 10% found their own way out of the woods.
Eric Johnson David Lovelock Search And Rescue, and Mathematics

Distance Traveled From IPP In Miles
Category 25% 50% 75% 90% RangeChildren (1 – 3) 0.31 0.64 1.12 1.26 0.06 – 1.65Youths (13 – 15) 0.53 0.93 1.86 2.60 0.25 – 4.35
“As the crow flies.”
Eric Johnson David Lovelock Search And Rescue, and Mathematics

Circle Of Radius 4.35 Miles
Eric Johnson David Lovelock Search And Rescue, and Mathematics

Area Of Circle Of Radius 4.35 Miles
Area of circle of radius r?
A =
πr2.
Estimateπ ≈ 3.
r ≈ 4.
A ≈ 3× 42 = 48 square miles.
Is this area, 48 square miles, smaller of larger than the actualarea?3 < π and 4 < 4.35, so
3× 42 < π × (4.35)2 ≈ 60 square miles.
Eric Johnson David Lovelock Search And Rescue, and Mathematics

Area Of Circle Of Radius 4.35 Miles
Area of circle of radius r?
A = πr2.
Estimateπ ≈ 3.
r ≈ 4.
A ≈ 3× 42 = 48 square miles.
Is this area, 48 square miles, smaller of larger than the actualarea?3 < π and 4 < 4.35, so
3× 42 < π × (4.35)2 ≈ 60 square miles.
Eric Johnson David Lovelock Search And Rescue, and Mathematics

Area Of Circle Of Radius 4.35 Miles
Area of circle of radius r?
A = πr2.
Estimateπ
≈ 3.
r ≈ 4.
A ≈ 3× 42 = 48 square miles.
Is this area, 48 square miles, smaller of larger than the actualarea?3 < π and 4 < 4.35, so
3× 42 < π × (4.35)2 ≈ 60 square miles.
Eric Johnson David Lovelock Search And Rescue, and Mathematics

Area Of Circle Of Radius 4.35 Miles
Area of circle of radius r?
A = πr2.
Estimateπ ≈ 3.
r
≈ 4.
A ≈ 3× 42 = 48 square miles.
Is this area, 48 square miles, smaller of larger than the actualarea?3 < π and 4 < 4.35, so
3× 42 < π × (4.35)2 ≈ 60 square miles.
Eric Johnson David Lovelock Search And Rescue, and Mathematics

Area Of Circle Of Radius 4.35 Miles
Area of circle of radius r?
A = πr2.
Estimateπ ≈ 3.
r ≈ 4.
A ≈ 3× 42 =
48 square miles.
Is this area, 48 square miles, smaller of larger than the actualarea?3 < π and 4 < 4.35, so
3× 42 < π × (4.35)2 ≈ 60 square miles.
Eric Johnson David Lovelock Search And Rescue, and Mathematics

Area Of Circle Of Radius 4.35 Miles
Area of circle of radius r?
A = πr2.
Estimateπ ≈ 3.
r ≈ 4.
A ≈ 3× 42 = 48
square miles.
Is this area, 48 square miles, smaller of larger than the actualarea?3 < π and 4 < 4.35, so
3× 42 < π × (4.35)2 ≈ 60 square miles.
Eric Johnson David Lovelock Search And Rescue, and Mathematics

Area Of Circle Of Radius 4.35 Miles
Area of circle of radius r?
A = πr2.
Estimateπ ≈ 3.
r ≈ 4.
A ≈ 3× 42 = 48 square miles.
Is this area, 48 square miles, smaller of larger than the actualarea?3 < π and 4 < 4.35, so
3× 42 < π × (4.35)2 ≈ 60 square miles.
Eric Johnson David Lovelock Search And Rescue, and Mathematics

Area Of Circle Of Radius 4.35 Miles
Area of circle of radius r?
A = πr2.
Estimateπ ≈ 3.
r ≈ 4.
A ≈ 3× 42 = 48 square miles.
Is this area, 48 square miles, smaller of larger than the actualarea?
3 < π and 4 < 4.35, so
3× 42 < π × (4.35)2 ≈ 60 square miles.
Eric Johnson David Lovelock Search And Rescue, and Mathematics
Area Of Circle Of Radius 4.35 Miles
Area of circle of radius r?
A = πr2.
Estimateπ ≈ 3.
r ≈ 4.
A ≈ 3× 42 = 48 square miles.
Is this area, 48 square miles, smaller of larger than the actualarea?3 < π and 4 < 4.35, so
3× 42 < π × (4.35)2 ≈ 60 square miles.
Eric Johnson David Lovelock Search And Rescue, and Mathematics

Area Of Circle Of Radius 4.35 Miles
Area of circle of radius r?
A = πr2.
Estimateπ ≈ 3.
r ≈ 4.
A ≈ 3× 42 = 48 square miles.
Is this area, 48 square miles, smaller of larger than the actualarea?3 < π and 4 < 4.35, so
3× 42 < π × (4.35)2 ≈ 60 square miles.
Eric Johnson David Lovelock Search And Rescue, and Mathematics

Area
On average, a subject moves away from the IPP at about1 mph. What is the area of corresponding circle?
Time (hrs) Area (sq. miles)1 3.14 Original size
2 12.57 4× Original size3 28.27 9× Original size4 50.27 16× Original size5 78.54 25× Original size
Containment and action is critical to manage the size of thesearch area.
Eric Johnson David Lovelock Search And Rescue, and Mathematics

Area
On average, a subject moves away from the IPP at about1 mph. What is the area of corresponding circle?
Time (hrs) Area (sq. miles)1 3.14 Original size2 12.57 4× Original size
3 28.27 9× Original size4 50.27 16× Original size5 78.54 25× Original size
Containment and action is critical to manage the size of thesearch area.
Eric Johnson David Lovelock Search And Rescue, and Mathematics

Area
On average, a subject moves away from the IPP at about1 mph. What is the area of corresponding circle?
Time (hrs) Area (sq. miles)1 3.14 Original size2 12.57 4× Original size3 28.27 9× Original size
4 50.27 16× Original size5 78.54 25× Original size
Containment and action is critical to manage the size of thesearch area.
Eric Johnson David Lovelock Search And Rescue, and Mathematics

Area
On average, a subject moves away from the IPP at about1 mph. What is the area of corresponding circle?
Time (hrs) Area (sq. miles)1 3.14 Original size2 12.57 4× Original size3 28.27 9× Original size4 50.27 16× Original size
5 78.54 25× Original size
Containment and action is critical to manage the size of thesearch area.
Eric Johnson David Lovelock Search And Rescue, and Mathematics

Area
On average, a subject moves away from the IPP at about1 mph. What is the area of corresponding circle?
Time (hrs) Area (sq. miles)1 3.14 Original size2 12.57 4× Original size3 28.27 9× Original size4 50.27 16× Original size5 78.54 25× Original size
Containment and action is critical to manage the size of thesearch area.
Eric Johnson David Lovelock Search And Rescue, and Mathematics

Area
On average, a subject moves away from the IPP at about1 mph. What is the area of corresponding circle?
Time (hrs) Area (sq. miles)1 3.14 Original size2 12.57 4× Original size3 28.27 9× Original size4 50.27 16× Original size5 78.54 25× Original size
Containment and action is critical to manage the size of thesearch area.
Eric Johnson David Lovelock Search And Rescue, and Mathematics

Stage 2: Taking A Consensus
97% of all searches end during Stage 1.
What does an experienced search manager do if the hastysearch is not successful?
First, the search area is segmented into reasonably-sizedsegments.
Eric Johnson David Lovelock Search And Rescue, and Mathematics

Stage 2: Taking A Consensus
97% of all searches end during Stage 1.
What does an experienced search manager do if the hastysearch is not successful?
First, the search area is segmented into reasonably-sizedsegments.
Eric Johnson David Lovelock Search And Rescue, and Mathematics

The Search Area
Eric Johnson David Lovelock Search And Rescue, and Mathematics

The Search Area Segmented
Eric Johnson David Lovelock Search And Rescue, and Mathematics

Stage 2: Taking A Consensus
Then the search manager decides how “hot” each searchsegment is.
This is done by Taking a Consensus. The purpose is to put anumerical value on how “hot” each search segment is.
Assumptions (Mathematics):If the subject is in the search area, then the subject is notmoving.There is a chance that the subject is not in the search area.
Eric Johnson David Lovelock Search And Rescue, and Mathematics

Taking A Consensus
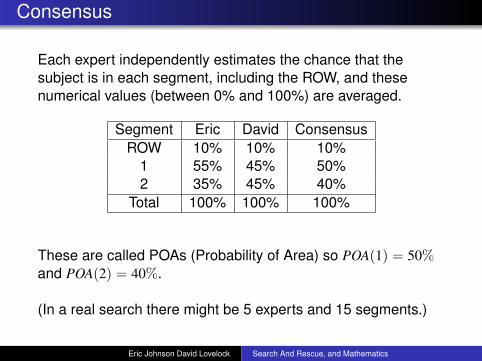
Each expert independently estimates the chance that thesubject is in each segment, including the ROW, and thesenumerical values (between 0% and 100%) are averaged.
Segment Eric David ConsensusROW
12
Total
Eric Johnson David Lovelock Search And Rescue, and Mathematics

Consensus
Each expert independently estimates the chance that thesubject is in each segment, including the ROW, and thesenumerical values (between 0% and 100%) are averaged.
Segment Eric David ConsensusROW 10%
1 55%2 35%
Total 100%
Eric Johnson David Lovelock Search And Rescue, and Mathematics

Consensus
Each expert independently estimates the chance that thesubject is in each segment, including the ROW, and thesenumerical values (between 0% and 100%) are averaged.
Segment Eric David ConsensusROW 10% 10%
1 55% 45%2 35% 45%
Total 100% 100%
Eric Johnson David Lovelock Search And Rescue, and Mathematics

Consensus
Each expert independently estimates the chance that thesubject is in each segment, including the ROW, and thesenumerical values (between 0% and 100%) are averaged.
Segment Eric David ConsensusROW 10% 10% 10%
1 55% 45% 50%2 35% 45% 40%
Total 100% 100% 100%
These are called POAs (Probability of Area) so POA(1) = 50%and POA(2) = 40%.
(In a real search there might be 5 experts and 15 segments.)
Eric Johnson David Lovelock Search And Rescue, and Mathematics

Consensus
Each expert independently estimates the chance that thesubject is in each segment, including the ROW, and thesenumerical values (between 0% and 100%) are averaged.
Segment Eric David ConsensusROW 10% 10% 10%
1 55% 45% 50%2 35% 45% 40%
Total 100% 100% 100%
These are called POAs (Probability of Area) so POA(1) = 50%and POA(2) = 40%.
(In a real search there might be 5 experts and 15 segments.)
Eric Johnson David Lovelock Search And Rescue, and Mathematics
Consensus
Each expert independently estimates the chance that thesubject is in each segment, including the ROW, and thesenumerical values (between 0% and 100%) are averaged.
Segment Eric David ConsensusROW 10% 10% 10%
1 55% 45% 50%2 35% 45% 40%
Total 100% 100% 100%
These are called POAs (Probability of Area) so POA(1) = 50%and POA(2) = 40%.
(In a real search there might be 5 experts and 15 segments.)
Eric Johnson David Lovelock Search And Rescue, and Mathematics

The Problem
Eric Johnson David Lovelock Search And Rescue, and Mathematics

Stage 3: Long-term, Large-scale Searches
A large-scale search usually involves
Multiple resources not all local (Ground pounders, Divers,K9, Helicopters, Fixed wing aircraft, Posse, 4WD, Pigs,ATV, Climbers, Infrared, . . . ).Multiple agencies (Sheriff/Police/Highway Patrol, ParkService, Forest Service, FBI, Military).Many search segments. Search areas rather than trailsand locations.Search theory (mathematics).A stationary subject.Lots of press coverage (good and bad) some on front page.Lots of pressure, anxiety, criticism.Lots of untrained volunteers, second-guessers, and“experts”.
Eric Johnson David Lovelock Search And Rescue, and Mathematics

The Problem
Chances in Segment 1 > Chances in Segment 2 > ROW.We have one resource available to search one segment.
Where do we put the resource?The resource returns and has not found the subject. Hasprobability of subject being in Segment 1 increased,decreased, not changed? What about Segment 2? Whatabout ROW?The amount by which the probabilities change depends onthe efficiency of the resource in the searched segment(called its POD, Probability of Detection).What do we do now? Use Mathematics.
Eric Johnson David Lovelock Search And Rescue, and Mathematics

The Problem
Chances in Segment 1 > Chances in Segment 2 > ROW.We have one resource available to search one segment.Where do we put the resource?
The resource returns and has not found the subject. Hasprobability of subject being in Segment 1 increased,decreased, not changed? What about Segment 2? Whatabout ROW?The amount by which the probabilities change depends onthe efficiency of the resource in the searched segment(called its POD, Probability of Detection).What do we do now? Use Mathematics.
Eric Johnson David Lovelock Search And Rescue, and Mathematics

The Problem
Chances in Segment 1 > Chances in Segment 2 > ROW.We have one resource available to search one segment.Where do we put the resource?The resource returns and has not found the subject. Hasprobability of subject being in Segment 1 increased,decreased, not changed?
What about Segment 2? Whatabout ROW?The amount by which the probabilities change depends onthe efficiency of the resource in the searched segment(called its POD, Probability of Detection).What do we do now? Use Mathematics.
Eric Johnson David Lovelock Search And Rescue, and Mathematics

The Problem
Chances in Segment 1 > Chances in Segment 2 > ROW.We have one resource available to search one segment.Where do we put the resource?The resource returns and has not found the subject. Hasprobability of subject being in Segment 1 increased,decreased, not changed? What about Segment 2?
Whatabout ROW?The amount by which the probabilities change depends onthe efficiency of the resource in the searched segment(called its POD, Probability of Detection).What do we do now? Use Mathematics.
Eric Johnson David Lovelock Search And Rescue, and Mathematics

The Problem
Chances in Segment 1 > Chances in Segment 2 > ROW.We have one resource available to search one segment.Where do we put the resource?The resource returns and has not found the subject. Hasprobability of subject being in Segment 1 increased,decreased, not changed? What about Segment 2? Whatabout ROW?
The amount by which the probabilities change depends onthe efficiency of the resource in the searched segment(called its POD, Probability of Detection).What do we do now? Use Mathematics.
Eric Johnson David Lovelock Search And Rescue, and Mathematics

The Problem
Chances in Segment 1 > Chances in Segment 2 > ROW.We have one resource available to search one segment.Where do we put the resource?The resource returns and has not found the subject. Hasprobability of subject being in Segment 1 increased,decreased, not changed? What about Segment 2? Whatabout ROW?The amount by which the probabilities change depends onthe efficiency of the resource in the searched segment(called its POD, Probability of Detection).
What do we do now? Use Mathematics.
Eric Johnson David Lovelock Search And Rescue, and Mathematics

The Problem
Chances in Segment 1 > Chances in Segment 2 > ROW.We have one resource available to search one segment.Where do we put the resource?The resource returns and has not found the subject. Hasprobability of subject being in Segment 1 increased,decreased, not changed? What about Segment 2? Whatabout ROW?The amount by which the probabilities change depends onthe efficiency of the resource in the searched segment(called its POD, Probability of Detection).What do we do now?
Use Mathematics.
Eric Johnson David Lovelock Search And Rescue, and Mathematics

The Problem
Chances in Segment 1 > Chances in Segment 2 > ROW.We have one resource available to search one segment.Where do we put the resource?The resource returns and has not found the subject. Hasprobability of subject being in Segment 1 increased,decreased, not changed? What about Segment 2? Whatabout ROW?The amount by which the probabilities change depends onthe efficiency of the resource in the searched segment(called its POD, Probability of Detection).What do we do now? Use Mathematics.
Eric Johnson David Lovelock Search And Rescue, and Mathematics

The Problem
Eric Johnson David Lovelock Search And Rescue, and Mathematics

The Problem
Eric Johnson David Lovelock Search And Rescue, and Mathematics

The Problem
Eric Johnson David Lovelock Search And Rescue, and Mathematics

The Problem
Eric Johnson David Lovelock Search And Rescue, and Mathematics

POAs and POD
Event POA(1) POA(2) ROW SumConsensus 50.00% 40.00% 10.00% 100.00%
POD(1) = 60% 28.57% 57.14% 14.29% 100.00%POD(2) = 30% 34.48% 48.28% 17.24% 100.00%
Rounded to 2 decimal places.
Note. ROW always increases, so it can be usedTo suggest when to expand the search area (ROW > 50%).To suggest when to suspend the search (ROW > 95%).
But where do these numbers come from? Mathematics!Specifically, Probability Theory and Bayes’ Theorem.
Eric Johnson David Lovelock Search And Rescue, and Mathematics

POAs and POD
Event POA(1) POA(2) ROW SumConsensus 50.00% 40.00% 10.00% 100.00%
POD(1) = 60%
28.57% 57.14% 14.29% 100.00%POD(2) = 30% 34.48% 48.28% 17.24% 100.00%
Rounded to 2 decimal places.
Note. ROW always increases, so it can be usedTo suggest when to expand the search area (ROW > 50%).To suggest when to suspend the search (ROW > 95%).
But where do these numbers come from? Mathematics!Specifically, Probability Theory and Bayes’ Theorem.
Eric Johnson David Lovelock Search And Rescue, and Mathematics

POAs and POD
Event POA(1) POA(2) ROW SumConsensus 50.00% 40.00% 10.00% 100.00%
POD(1) = 60% 28.57% 57.14% 14.29% 100.00%
POD(2) = 30% 34.48% 48.28% 17.24% 100.00%
Rounded to 2 decimal places.
Note. ROW always increases, so it can be usedTo suggest when to expand the search area (ROW > 50%).To suggest when to suspend the search (ROW > 95%).
But where do these numbers come from? Mathematics!Specifically, Probability Theory and Bayes’ Theorem.
Eric Johnson David Lovelock Search And Rescue, and Mathematics

POAs and POD
Event POA(1) POA(2) ROW SumConsensus 50.00% 40.00% 10.00% 100.00%
POD(1) = 60% 28.57% 57.14% 14.29% 100.00%POD(2) = 30%
34.48% 48.28% 17.24% 100.00%
Rounded to 2 decimal places.
Note. ROW always increases, so it can be usedTo suggest when to expand the search area (ROW > 50%).To suggest when to suspend the search (ROW > 95%).
But where do these numbers come from? Mathematics!Specifically, Probability Theory and Bayes’ Theorem.
Eric Johnson David Lovelock Search And Rescue, and Mathematics

POAs and POD
Event POA(1) POA(2) ROW SumConsensus 50.00% 40.00% 10.00% 100.00%
POD(1) = 60% 28.57% 57.14% 14.29% 100.00%POD(2) = 30% 34.48% 48.28% 17.24% 100.00%
Rounded to 2 decimal places.
Note. ROW always increases, so it can be usedTo suggest when to expand the search area (ROW > 50%).To suggest when to suspend the search (ROW > 95%).
But where do these numbers come from? Mathematics!Specifically, Probability Theory and Bayes’ Theorem.
Eric Johnson David Lovelock Search And Rescue, and Mathematics

POAs and POD
Event POA(1) POA(2) ROW SumConsensus 50.00% 40.00% 10.00% 100.00%
POD(1) = 60% 28.57% 57.14% 14.29% 100.00%POD(2) = 30% 34.48% 48.28% 17.24% 100.00%
Rounded to 2 decimal places.
Note. ROW always increases, so it can be usedTo suggest when to expand the search area (ROW > 50%).To suggest when to suspend the search (ROW > 95%).
But where do these numbers come from? Mathematics!Specifically, Probability Theory and Bayes’ Theorem.
Eric Johnson David Lovelock Search And Rescue, and Mathematics

POAs and POD
Event POA(1) POA(2) ROW SumConsensus 50.00% 40.00% 10.00% 100.00%
POD(1) = 60% 28.57% 57.14% 14.29% 100.00%POD(2) = 30% 34.48% 48.28% 17.24% 100.00%
Rounded to 2 decimal places.
Note. ROW always increases, so it can be usedTo suggest when to expand the search area (ROW > 50%).To suggest when to suspend the search (ROW > 95%).
But where do these numbers come from?
Mathematics!Specifically, Probability Theory and Bayes’ Theorem.
Eric Johnson David Lovelock Search And Rescue, and Mathematics

POAs and POD
Event POA(1) POA(2) ROW SumConsensus 50.00% 40.00% 10.00% 100.00%
POD(1) = 60% 28.57% 57.14% 14.29% 100.00%POD(2) = 30% 34.48% 48.28% 17.24% 100.00%
Rounded to 2 decimal places.
Note. ROW always increases, so it can be usedTo suggest when to expand the search area (ROW > 50%).To suggest when to suspend the search (ROW > 95%).
But where do these numbers come from? Mathematics!Specifically, Probability Theory and Bayes’ Theorem.
Eric Johnson David Lovelock Search And Rescue, and Mathematics

POAs and POD
Event POA(1) POA(2) ROW SumConsensus 50.00% 40.00% 10.00% 100.00%
POD(1) = 60% 28.57% 100.00%
Segment 1 is searched with a probability of detection POD(1).1
The new POA of Segment 1 is
POAnew(1) =(1− POD(1))POAold(1)1− POD(1)POAold(1)
=(1− 0.60)0.501− (0.60)0.50
= 0.2857.
1All probabilities are between 0 and 1Eric Johnson David Lovelock Search And Rescue, and Mathematics

POAs and POD
Event POA(1) POA(2) ROW SumConsensus 50.00% 40.00% 10.00% 100.00%
POD(1) = 60% 28.57% 100.00%
Segment 1 is searched with a probability of detection POD(1).1
The new POA of Segment 1 is
POAnew(1) =(1− POD(1))POAold(1)1− POD(1)POAold(1)
=(1− 0.60)0.501− (0.60)0.50
= 0.2857.
1All probabilities are between 0 and 1Eric Johnson David Lovelock Search And Rescue, and Mathematics

POAs and POD
Event POA(1) POA(2) ROW SumConsensus 50.00% 40.00% 10.00% 100.00%
POD(1) = 60% 28.57% 100.00%
Segment 1 is searched with a probability of detection POD(1).1
The new POA of Segment 1 is
POAnew(1) =(1− POD(1))POAold(1)1− POD(1)POAold(1)
=(1− 0.60)0.501− (0.60)0.50
= 0.2857.
1All probabilities are between 0 and 1Eric Johnson David Lovelock Search And Rescue, and Mathematics

POAs and POD
Event POA(1) POA(2) ROW SumConsensus 50.00% 40.00% 10.00% 100.00%
POD(1) = 60% 28.57% 57.14% 14.29% 100.00%
The new POA of (unsearched) Segment 2 is
POAnew(2) =POAold(2)
1− POD(1)POAold(1)=
0.401− (0.60)0.50
= 0.5714.
Eric Johnson David Lovelock Search And Rescue, and Mathematics

POAs and POD
Event POA(1) POA(2) ROW SumConsensus 50.00% 40.00% 10.00% 100.00%
POD(1) = 60% 28.57% 57.14% 14.29% 100.00%
The new POA of (unsearched) Segment 2 is
POAnew(2) =POAold(2)
1− POD(1)POAold(1)
=0.40
1− (0.60)0.50= 0.5714.
Eric Johnson David Lovelock Search And Rescue, and Mathematics

POAs and POD
Event POA(1) POA(2) ROW SumConsensus 50.00% 40.00% 10.00% 100.00%
POD(1) = 60% 28.57% 57.14% 14.29% 100.00%
The new POA of (unsearched) Segment 2 is
POAnew(2) =POAold(2)
1− POD(1)POAold(1)=
0.401− (0.60)0.50
= 0.5714.
Eric Johnson David Lovelock Search And Rescue, and Mathematics

POAs and POD
Event POA(1) POA(2) ROW SumConsensus 50.00% 40.00% 10.00% 100.00%
POD(1) = 60% 28.57% 57.14% 14.29% 100.00%
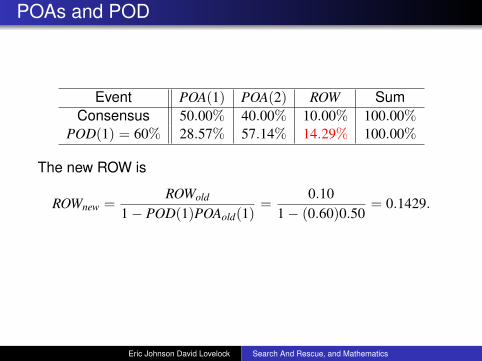
The new ROW is
ROWnew =ROWold
1− POD(1)POAold(1)=
0.101− (0.60)0.50
= 0.1429.
Then POAnew and ROWnew become POAold and ROWold, and theprocess is repeated for Segment 2.
Eric Johnson David Lovelock Search And Rescue, and Mathematics

POAs and POD
Event POA(1) POA(2) ROW SumConsensus 50.00% 40.00% 10.00% 100.00%
POD(1) = 60% 28.57% 57.14% 14.29% 100.00%
The new ROW is
ROWnew =ROWold
1− POD(1)POAold(1)
=0.10
1− (0.60)0.50= 0.1429.
Then POAnew and ROWnew become POAold and ROWold, and theprocess is repeated for Segment 2.
Eric Johnson David Lovelock Search And Rescue, and Mathematics
POAs and POD
Event POA(1) POA(2) ROW SumConsensus 50.00% 40.00% 10.00% 100.00%
POD(1) = 60% 28.57% 57.14% 14.29% 100.00%
The new ROW is
ROWnew =ROWold
1− POD(1)POAold(1)=
0.101− (0.60)0.50
= 0.1429.
Then POAnew and ROWnew become POAold and ROWold, and theprocess is repeated for Segment 2.
Eric Johnson David Lovelock Search And Rescue, and Mathematics

POAs and POD
Event POA(1) POA(2) ROW SumConsensus 50.00% 40.00% 10.00% 100.00%
POD(1) = 60% 28.57% 57.14% 14.29% 100.00%
The new ROW is
ROWnew =ROWold
1− POD(1)POAold(1)=
0.101− (0.60)0.50
= 0.1429.
Then POAnew and ROWnew become POAold and ROWold, and theprocess is repeated for Segment 2.
Eric Johnson David Lovelock Search And Rescue, and Mathematics

POAs and POD
Event POA(1) POA(2) ROW SumPOD(1) = 60% 28.57% 57.14% 14.29% 100.00%POD(2) = 30% 34.48% 48.28% 17.24% 100.00%
Segment 2 is searched with a probability of detection POD(2).The new POA of (unsearched) Segment 1 is
POAnew(1) =POAold(1)
1− POD(2)POAold(2)=
0.28571− (0.30)0.5714
= 0.3448.
Eric Johnson David Lovelock Search And Rescue, and Mathematics

POAs and POD
Event POA(1) POA(2) ROW SumPOD(1) = 60% 28.57% 57.14% 14.29% 100.00%POD(2) = 30% 34.48% 48.28% 17.24% 100.00%
Segment 2 is searched with a probability of detection POD(2).The new POA of (unsearched) Segment 1 is
POAnew(1) =POAold(1)
1− POD(2)POAold(2)
=0.2857
1− (0.30)0.5714= 0.3448.
Eric Johnson David Lovelock Search And Rescue, and Mathematics

POAs and POD
Event POA(1) POA(2) ROW SumPOD(1) = 60% 28.57% 57.14% 14.29% 100.00%POD(2) = 30% 34.48% 48.28% 17.24% 100.00%
Segment 2 is searched with a probability of detection POD(2).The new POA of (unsearched) Segment 1 is
POAnew(1) =POAold(1)
1− POD(2)POAold(2)=
0.28571− (0.30)0.5714
= 0.3448.
Eric Johnson David Lovelock Search And Rescue, and Mathematics

POAs and POD
Event POA(1) POA(2) ROW SumPOD(1) = 60% 28.57% 57.14% 14.29% 100.00%POD(2) = 30% 34.48% 48.28% 17.24% 100.00%
The new POA of Segment 2 is
POAnew(2) =(1− POD(2))POAold(2)1− POD(2)POAold(2)
=(1− 0.30)0.57141− (0.30)0.5714
= 0.4828,
Eric Johnson David Lovelock Search And Rescue, and Mathematics

POAs and POD
Event POA(1) POA(2) ROW SumPOD(1) = 60% 28.57% 57.14% 14.29% 100.00%POD(2) = 30% 34.48% 48.28% 17.24% 100.00%
The new POA of Segment 2 is
POAnew(2) =(1− POD(2))POAold(2)1− POD(2)POAold(2)
=(1− 0.30)0.57141− (0.30)0.5714
= 0.4828,
Eric Johnson David Lovelock Search And Rescue, and Mathematics

POAs and POD
Event POA(1) POA(2) ROW SumPOD(1) = 60% 28.57% 57.14% 14.29% 100.00%POD(2) = 30% 34.48% 48.28% 17.24% 100.00%
The new POA of Segment 2 is
POAnew(2) =(1− POD(2))POAold(2)1− POD(2)POAold(2)
=(1− 0.30)0.57141− (0.30)0.5714
= 0.4828,
Eric Johnson David Lovelock Search And Rescue, and Mathematics

POAs and POD
Event POA(1) POA(2) ROW SumPOD(1) = 60% 28.57% 57.14% 14.29% 100.00%POD(2) = 30% 34.48% 48.28% 17.24% 100.00%
The new ROW is
ROWnew =ROWold
1− POD(2)POAold(2)=
0.14291− (0.30)0.5714
= 0.1724.
Eric Johnson David Lovelock Search And Rescue, and Mathematics

POAs and POD
Event POA(1) POA(2) ROW SumPOD(1) = 60% 28.57% 57.14% 14.29% 100.00%POD(2) = 30% 34.48% 48.28% 17.24% 100.00%
The new ROW is
ROWnew =ROWold
1− POD(2)POAold(2)
=0.1429
1− (0.30)0.5714= 0.1724.
Eric Johnson David Lovelock Search And Rescue, and Mathematics

POAs and POD
Event POA(1) POA(2) ROW SumPOD(1) = 60% 28.57% 57.14% 14.29% 100.00%POD(2) = 30% 34.48% 48.28% 17.24% 100.00%
The new ROW is
ROWnew =ROWold
1− POD(2)POAold(2)=
0.14291− (0.30)0.5714
= 0.1724.
Eric Johnson David Lovelock Search And Rescue, and Mathematics

SAR Software
These calculations are important to the search managerbecause they suggest which segments to search next.
In practice, there may be 30 segments and 20 resourcesreporting, so we don’t do these calculations by hand, becauseeach resource’s POD requires that every segment’s POA has tobe updated. We use software specifically designed for SAR.
One such software is CASIE, Computer Aided SearchInformation Exchange. Initially developed about 30 years ago,updated to run under Windows. Can be downloaded fromwww.wcasie.com. It is free.
Eric Johnson David Lovelock Search And Rescue, and Mathematics

SAR Software
These calculations are important to the search managerbecause they suggest which segments to search next.
In practice, there may be 30 segments and 20 resourcesreporting, so we don’t do these calculations by hand, becauseeach resource’s POD requires that every segment’s POA has tobe updated. We use software specifically designed for SAR.
One such software is CASIE, Computer Aided SearchInformation Exchange. Initially developed about 30 years ago,updated to run under Windows. Can be downloaded fromwww.wcasie.com. It is free.
Eric Johnson David Lovelock Search And Rescue, and Mathematics

SAR Software
These calculations are important to the search managerbecause they suggest which segments to search next.
In practice, there may be 30 segments and 20 resourcesreporting, so we don’t do these calculations by hand, becauseeach resource’s POD requires that every segment’s POA has tobe updated. We use software specifically designed for SAR.
One such software is CASIE, Computer Aided SearchInformation Exchange. Initially developed about 30 years ago,updated to run under Windows. Can be downloaded fromwww.wcasie.com. It is free.
Eric Johnson David Lovelock Search And Rescue, and Mathematics

The Cumulative Probability of Detection
There is another useful number that the search manager looksat, the Cumulative Probability of Detection, CPOD.
It tells the search manager how well a particular segment hasbeen searched by multiple resources.
Say Segment 1 was searched by two resources, with PODs P1and P2. Then
CPOD 6= P1 + P2,
butCPOD = 1− (1− P1)(1− P2).
For example, two resources each search Segment 1 with thesame POD of 50%. Then
CPOD 6= 0.50 + 0.50 = 1.00 = 100%,
but
CPOD = 1− (1− 0.50)(1− 0.50) = 1− 0.25 = 0.75 = 75%.
Eric Johnson David Lovelock Search And Rescue, and Mathematics

The Cumulative Probability of Detection
There is another useful number that the search manager looksat, the Cumulative Probability of Detection, CPOD.
It tells the search manager how well a particular segment hasbeen searched by multiple resources.
Say Segment 1 was searched by two resources, with PODs P1and P2. Then
CPOD 6= P1 + P2,
butCPOD = 1− (1− P1)(1− P2).
For example, two resources each search Segment 1 with thesame POD of 50%. Then
CPOD 6= 0.50 + 0.50 = 1.00 = 100%,
but
CPOD = 1− (1− 0.50)(1− 0.50) = 1− 0.25 = 0.75 = 75%.
Eric Johnson David Lovelock Search And Rescue, and Mathematics

The Cumulative Probability of Detection
There is another useful number that the search manager looksat, the Cumulative Probability of Detection, CPOD.
It tells the search manager how well a particular segment hasbeen searched by multiple resources.
Say Segment 1 was searched by two resources, with PODs P1and P2. Then
CPOD 6= P1 + P2,
butCPOD = 1− (1− P1)(1− P2).
For example, two resources each search Segment 1 with thesame POD of 50%. Then
CPOD 6= 0.50 + 0.50 = 1.00 = 100%,
but
CPOD = 1− (1− 0.50)(1− 0.50) = 1− 0.25 = 0.75 = 75%.
Eric Johnson David Lovelock Search And Rescue, and Mathematics

The Cumulative Probability of Detection
There is another useful number that the search manager looksat, the Cumulative Probability of Detection, CPOD.
It tells the search manager how well a particular segment hasbeen searched by multiple resources.
Say Segment 1 was searched by two resources, with PODs P1and P2. Then
CPOD 6= P1 + P2,
butCPOD = 1− (1− P1)(1− P2).
For example, two resources each search Segment 1 with thesame POD of 50%. Then
CPOD 6= 0.50 + 0.50 = 1.00 = 100%,
but
CPOD = 1− (1− 0.50)(1− 0.50) = 1− 0.25 = 0.75 = 75%.
Eric Johnson David Lovelock Search And Rescue, and Mathematics

The Cumulative Probability of Detection
There is another useful number that the search manager looksat, the Cumulative Probability of Detection, CPOD.
It tells the search manager how well a particular segment hasbeen searched by multiple resources.
Say Segment 1 was searched by two resources, with PODs P1and P2. Then
CPOD 6= P1 + P2,
butCPOD = 1− (1− P1)(1− P2).
For example, two resources each search Segment 1 with thesame POD of 50%. Then
CPOD 6= 0.50 + 0.50 = 1.00 = 100%,
but
CPOD = 1− (1− 0.50)(1− 0.50) = 1− 0.25 = 0.75 = 75%.
Eric Johnson David Lovelock Search And Rescue, and Mathematics

The Cumulative Probability of Detection
There is another useful number that the search manager looksat, the Cumulative Probability of Detection, CPOD.
It tells the search manager how well a particular segment hasbeen searched by multiple resources.
Say Segment 1 was searched by two resources, with PODs P1and P2. Then
CPOD 6= P1 + P2,
butCPOD = 1− (1− P1)(1− P2).
For example, two resources each search Segment 1 with thesame POD of 50%. Then
CPOD 6= 0.50 + 0.50 = 1.00 = 100%,
but
CPOD = 1− (1− 0.50)(1− 0.50) = 1− 0.25 = 0.75 = 75%.Eric Johnson David Lovelock Search And Rescue, and Mathematics

The Cumulative Probability of Detection
Where doesCPOD = 1− (1− P1)(1− P2)
come from?
If P1 is the probability of finding the subject in a particularsegment after one search, what does 1− P1 represent?The probability of NOT finding the subject in that segment afterone search.So rewrite the equation as
1− CPOD = (1− P1)(1− P2),
we see that the probability of NOT finding the subject in thatsegment after two searches is the probability of NOT finding thesubject in that segment after the first search search multipliedby the probability of NOT finding the subject in that segmentafter the second search.
Eric Johnson David Lovelock Search And Rescue, and Mathematics

The Cumulative Probability of Detection
Where doesCPOD = 1− (1− P1)(1− P2)
come from?If P1 is the probability of finding the subject in a particularsegment after one search, what does 1− P1 represent?
The probability of NOT finding the subject in that segment afterone search.So rewrite the equation as
1− CPOD = (1− P1)(1− P2),
we see that the probability of NOT finding the subject in thatsegment after two searches is the probability of NOT finding thesubject in that segment after the first search search multipliedby the probability of NOT finding the subject in that segmentafter the second search.
Eric Johnson David Lovelock Search And Rescue, and Mathematics

The Cumulative Probability of Detection
Where doesCPOD = 1− (1− P1)(1− P2)
come from?If P1 is the probability of finding the subject in a particularsegment after one search, what does 1− P1 represent?The probability of NOT finding the subject in that segment afterone search.
So rewrite the equation as
1− CPOD = (1− P1)(1− P2),
we see that the probability of NOT finding the subject in thatsegment after two searches is the probability of NOT finding thesubject in that segment after the first search search multipliedby the probability of NOT finding the subject in that segmentafter the second search.
Eric Johnson David Lovelock Search And Rescue, and Mathematics

The Cumulative Probability of Detection
Where doesCPOD = 1− (1− P1)(1− P2)
come from?If P1 is the probability of finding the subject in a particularsegment after one search, what does 1− P1 represent?The probability of NOT finding the subject in that segment afterone search.So rewrite the equation as
1− CPOD = (1− P1)(1− P2),
we see that the probability of NOT finding the subject in thatsegment after two searches is the probability of NOT finding thesubject in that segment after the first search search multipliedby the probability of NOT finding the subject in that segmentafter the second search.
Eric Johnson David Lovelock Search And Rescue, and Mathematics

The Cumulative Probability of Detection
Where doesCPOD = 1− (1− P1)(1− P2)
come from?If P1 is the probability of finding the subject in a particularsegment after one search, what does 1− P1 represent?The probability of NOT finding the subject in that segment afterone search.So rewrite the equation as
1− CPOD = (1− P1)(1− P2),
we see that the probability of NOT finding the subject in thatsegment after two searches is the probability of NOT finding thesubject in that segment after the first search search multipliedby the probability of NOT finding the subject in that segmentafter the second search.
Eric Johnson David Lovelock Search And Rescue, and Mathematics

Finally
Any questions?
David LovelockEmail: [email protected] Webpage: wcasie.com
Another Webpage: SARAZ.ORG
Thank you.
Eric Johnson David Lovelock Search And Rescue, and Mathematics

Finally
Any questions?David Lovelock
Email: [email protected] Webpage: wcasie.com
Another Webpage: SARAZ.ORG
Thank you.
Eric Johnson David Lovelock Search And Rescue, and Mathematics

Finally
Any questions?David Lovelock
Email: [email protected] Webpage: wcasie.com
Another Webpage: SARAZ.ORG
Thank you.
Eric Johnson David Lovelock Search And Rescue, and Mathematics

Comments About Estimating POD
The desert and mountain helicopter experiments.
Bright-sunny daysResponding Non-responding
Desert 100% 30%Mountain 60–80% ≈ 67% 0%
On cloudy days in desert 30%→ 68%
Overestimating PODs leads to artificially high ROW, whichmay cause the search to be suspended too early.
Eric Johnson David Lovelock Search And Rescue, and Mathematics

Comments About Estimating POD
The desert and mountain helicopter experiments.Bright-sunny days
Responding Non-respondingDesert 100% 30%
Mountain 60–80% ≈ 67% 0%
On cloudy days in desert 30%→ 68%
Overestimating PODs leads to artificially high ROW, whichmay cause the search to be suspended too early.
Eric Johnson David Lovelock Search And Rescue, and Mathematics

Comments About Estimating POD
The desert and mountain helicopter experiments.Bright-sunny days
Responding Non-respondingDesert 100% 30%
Mountain 60–80% ≈ 67% 0%On cloudy days in desert 30%→ 68%
Overestimating PODs leads to artificially high ROW, whichmay cause the search to be suspended too early.
Eric Johnson David Lovelock Search And Rescue, and Mathematics

Comments About Estimating POD
The desert and mountain helicopter experiments.Bright-sunny days
Responding Non-respondingDesert 100% 30%
Mountain 60–80% ≈ 67% 0%On cloudy days in desert 30%→ 68%
Overestimating PODs leads to artificially high ROW, whichmay cause the search to be suspended too early.
Eric Johnson David Lovelock Search And Rescue, and Mathematics

Helicopter Experiments
Eric Johnson David Lovelock Search And Rescue, and Mathematics
Helicopter Experiments
Eric Johnson David Lovelock Search And Rescue, and Mathematics

Helicopter Experiments
Eric Johnson David Lovelock Search And Rescue, and Mathematics